Réduction des Modèles linéaires -...
91
Réduction des Modèles linéaires B. CHERKI Département d’Automatique Université Aboubekr Belkaid Tlemcen Algérie ORAN - du 09 au 12 Décembre 2013 B. CHERKI () Réduction des Modèles linéaires Oran 1 / 57
Transcript of Réduction des Modèles linéaires -...
-
Réduction des Modèles linéaires
B. CHERKI
Département d’AutomatiqueUniversité Aboubekr Belkaid Tlemcen Algérie
ORAN - du 09 au 12 Décembre 2013
B. CHERKI () Réduction des Modèles linéaires Oran 1 / 57
-
Introduction
Les systèmes considérés son décrit par :
ẋ = Ax(t) + Bu(t) x(t0) = x0y = Cx(t) + Du(t)
x(t) ∈ Rn est appelé état du système, x(t0) est la condition initiale,u(t) ∈ Rm est l’entrée du système, y(t) ∈ Rp est la sortie du système.A,B,C,D des matrices à coefficients constants de dimensionsappropriées
Ils décrivent beaucoup de systèmes physiques autour de pointsde fonctionnementLa Complexité est due à la dimension
B. CHERKI () Réduction des Modèles linéaires Oran 2 / 57
-
Introduction
Les systèmes considérés son décrit par :
ẋ = Ax(t) + Bu(t) x(t0) = x0y = Cx(t) + Du(t)
x(t) ∈ Rn est appelé état du système, x(t0) est la condition initiale,u(t) ∈ Rm est l’entrée du système, y(t) ∈ Rp est la sortie du système.A,B,C,D des matrices à coefficients constants de dimensionsappropriées
Ils décrivent beaucoup de systèmes physiques autour de pointsde fonctionnementLa Complexité est due à la dimension
B. CHERKI () Réduction des Modèles linéaires Oran 2 / 57
-
Que cherche t-on à faire ?
Approximer le système initial par un système de même nature mais dedimension plus petite, tout en préservant les propriètés entrée /sortie.Les questions posées
Y’ a t-il des limites fondamentales à la réduction ?Quelle type de norme utiliser pour quantifier l’approximation ?Algorithme de réductionQuelle est la qualité de l’approximation obtenue ?
B. CHERKI () Réduction des Modèles linéaires Oran 3 / 57
-
Que cherche t-on à faire ?
Approximer le système initial par un système de même nature mais dedimension plus petite, tout en préservant les propriètés entrée /sortie.Les questions posées
Y’ a t-il des limites fondamentales à la réduction ?Quelle type de norme utiliser pour quantifier l’approximation ?Algorithme de réductionQuelle est la qualité de l’approximation obtenue ?
B. CHERKI () Réduction des Modèles linéaires Oran 3 / 57
-
Que cherche t-on à faire ?
Approximer le système initial par un système de même nature mais dedimension plus petite, tout en préservant les propriètés entrée /sortie.Les questions posées
Y’ a t-il des limites fondamentales à la réduction ?Quelle type de norme utiliser pour quantifier l’approximation ?Algorithme de réductionQuelle est la qualité de l’approximation obtenue ?
B. CHERKI () Réduction des Modèles linéaires Oran 3 / 57
-
Que cherche t-on à faire ?
Approximer le système initial par un système de même nature mais dedimension plus petite, tout en préservant les propriètés entrée /sortie.Les questions posées
Y’ a t-il des limites fondamentales à la réduction ?Quelle type de norme utiliser pour quantifier l’approximation ?Algorithme de réductionQuelle est la qualité de l’approximation obtenue ?
B. CHERKI () Réduction des Modèles linéaires Oran 3 / 57
-
Notions nécessaires à developper
Commandabilté des systèmes linéairesObservabilité des systèmes linéairesComportement entrée /sortie : Matrice de transfertRéalisation minimale - Une première réductionUn ingrédient important : La décomposition en valeur singulière
B. CHERKI () Réduction des Modèles linéaires Oran 4 / 57
-
Notions nécessaires à developper
Commandabilté des systèmes linéairesObservabilité des systèmes linéairesComportement entrée /sortie : Matrice de transfertRéalisation minimale - Une première réductionUn ingrédient important : La décomposition en valeur singulière
B. CHERKI () Réduction des Modèles linéaires Oran 4 / 57
-
Notions nécessaires à developper
Commandabilté des systèmes linéairesObservabilité des systèmes linéairesComportement entrée /sortie : Matrice de transfertRéalisation minimale - Une première réductionUn ingrédient important : La décomposition en valeur singulière
B. CHERKI () Réduction des Modèles linéaires Oran 4 / 57
-
Notions nécessaires à developper
Commandabilté des systèmes linéairesObservabilité des systèmes linéairesComportement entrée /sortie : Matrice de transfertRéalisation minimale - Une première réductionUn ingrédient important : La décomposition en valeur singulière
B. CHERKI () Réduction des Modèles linéaires Oran 4 / 57
-
Notions nécessaires à developper
Commandabilté des systèmes linéairesObservabilité des systèmes linéairesComportement entrée /sortie : Matrice de transfertRéalisation minimale - Une première réductionUn ingrédient important : La décomposition en valeur singulière
B. CHERKI () Réduction des Modèles linéaires Oran 4 / 57
-
Matrice de Transfert
La matrice de transfert est définie par la relation Y (s) = G(s)U(s)avec la condition initiale x(t0) = 0. Elle est donnée par :
G(s) = C(sI − A)−1B + D
La description d’un système physique peut se faire avec différentescoordonnées bien que certaines coordonnées n’aient pas de sensphysique, elles peuvent rendre l’analyse et la synthèse plus faciles.Engénéral soit T ∈ Rn×n une matrice non singulière et soit x = Tx alors :
ẋ = TAT−1x + TBuy = CT−1x + Du
B. CHERKI () Réduction des Modèles linéaires Oran 5 / 57
-
Matrice de Transfert (suite)
La matrice de transfert ne change pas par changement decoordonnées.
G(s) = C(sI − A)−1B + D= C(sTT−1 − A)−1B + D= C[T−1(sI − TAT−1)T ]−1B + D= CT−1(sI − TAT−1)−1TB + D= C(sI − A)B + D
B. CHERKI () Réduction des Modèles linéaires Oran 6 / 57
-
Commandabilité des systèmes linéaires
ẋ = Ax(t) + Bu(t) x(t0) = x0 (1)y = Cx(t) + Du(t)
DéfinitionLe système linéaire décrit par (1) ou la paire (A,B) est ditcommandable si pour n’importe quel état initial x(t0) = x0, t1 > 0 et unétat final x1 il existe une commande u(t) continue par morceaux telleque la solution de (1) vérifie x(t1) = x1. Autrement le système ou lapaire (A,B) est dit non commandable
B. CHERKI () Réduction des Modèles linéaires Oran 7 / 57
-
Critères de Commandabilité
ThéorèmeLes assertions suivantes sont équivalentes
i) (A,B) est commandableii) la matrice
Wc(t) :=∫ t
0eAτBB∗eA
∗τdτ
est définie positive ∀t > 0iii) La matrice de commandabilité C =
[B AB · · · An−1B
]est de
rang complet par les lignes.
B. CHERKI () Réduction des Modèles linéaires Oran 8 / 57
-
Critères de Commandabilité
ThéorèmeLes assertions suivantes sont équivalentes
i) (A,B) est commandableii) la matrice
Wc(t) :=∫ t
0eAτBB∗eA
∗τdτ
est définie positive ∀t > 0iii) La matrice de commandabilité C =
[B AB · · · An−1B
]est de
rang complet par les lignes.
B. CHERKI () Réduction des Modèles linéaires Oran 8 / 57
-
Critères de Commandabilité
ThéorèmeLes assertions suivantes sont équivalentes
i) (A,B) est commandableii) la matrice
Wc(t) :=∫ t
0eAτBB∗eA
∗τdτ
est définie positive ∀t > 0iii) La matrice de commandabilité C =
[B AB · · · An−1B
]est de
rang complet par les lignes.
B. CHERKI () Réduction des Modèles linéaires Oran 8 / 57
-
Critères de Commandabilité
ThéorèmeLes assertions suivantes sont équivalentes
i) (A,B) est commandableii) la matrice
Wc(t) :=∫ t
0eAτBB∗eA
∗τdτ
est définie positive ∀t > 0iii) La matrice de commandabilité C =
[B AB · · · An−1B
]est de
rang complet par les lignes.
B. CHERKI () Réduction des Modèles linéaires Oran 8 / 57
-
Critères de Commandabilité (suite)
Théorème (suite)
iv) La matrice [A− λI,B] est de rang complet ∀λ ∈ Cv) Soient λ et x n’importe quelle valeur propre et n’importe quel
vecteur propre à gauche correspondant (x∗A = x∗λ) alors x∗B 6= 0vi) Les valeurs propres de (A + BF ) peuvent être arbitrairement
choisies par un choix judicieux de F
u(τ) = −B∗eA∗(t1−τ)Wc(t1)−1(eAt1x0 − x1)
permet de transfeŕer l’état de x0 à x1
B. CHERKI () Réduction des Modèles linéaires Oran 9 / 57
-
Critères de Commandabilité (suite)
Théorème (suite)
iv) La matrice [A− λI,B] est de rang complet ∀λ ∈ Cv) Soient λ et x n’importe quelle valeur propre et n’importe quel
vecteur propre à gauche correspondant (x∗A = x∗λ) alors x∗B 6= 0vi) Les valeurs propres de (A + BF ) peuvent être arbitrairement
choisies par un choix judicieux de F
u(τ) = −B∗eA∗(t1−τ)Wc(t1)−1(eAt1x0 − x1)
permet de transfeŕer l’état de x0 à x1
B. CHERKI () Réduction des Modèles linéaires Oran 9 / 57
-
Critères de Commandabilité (suite)
Théorème (suite)
iv) La matrice [A− λI,B] est de rang complet ∀λ ∈ Cv) Soient λ et x n’importe quelle valeur propre et n’importe quel
vecteur propre à gauche correspondant (x∗A = x∗λ) alors x∗B 6= 0vi) Les valeurs propres de (A + BF ) peuvent être arbitrairement
choisies par un choix judicieux de F
u(τ) = −B∗eA∗(t1−τ)Wc(t1)−1(eAt1x0 − x1)
permet de transfeŕer l’état de x0 à x1
B. CHERKI () Réduction des Modèles linéaires Oran 9 / 57
-
Critères de Commandabilité (suite)
Théorème (suite)
iv) La matrice [A− λI,B] est de rang complet ∀λ ∈ Cv) Soient λ et x n’importe quelle valeur propre et n’importe quel
vecteur propre à gauche correspondant (x∗A = x∗λ) alors x∗B 6= 0vi) Les valeurs propres de (A + BF ) peuvent être arbitrairement
choisies par un choix judicieux de F
u(τ) = −B∗eA∗(t1−τ)Wc(t1)−1(eAt1x0 − x1)
permet de transfeŕer l’état de x0 à x1
B. CHERKI () Réduction des Modèles linéaires Oran 9 / 57
-
Exemple
A =
0 1 00 0 1−a0 −a1 −a2
b = 00
1
C = [ b0 b1 b2 ] Lamatrice de commandabilité est donnée par C =
0 0 10 1 −a21 −a2 a22 − a1
On voit bien qu’elle est de rang 3, et donc le système est biencommandable. La matrice de transfert est donnée parg(s) = b2s
2+b1s+b0s3+a2s2+a1s+a0
B. CHERKI () Réduction des Modèles linéaires Oran 10 / 57
-
Observabilité des systèmes linéaires
Définitionle système décrit par (1) est dit observable si ∀t1 > 0 x(t0) = x0 peutêtre determiné à partir de u(t) t ∈ [0, t1] et y(t) ∈ [0, t1] autrement lesystème est dit inobservable
B. CHERKI () Réduction des Modèles linéaires Oran 11 / 57
-
Critères d’Observabilité
ThéorèmeLes assertions suivantes sont equivalentes :
i) (C, A) est observableii) La matrice
Wo :=∫ t
0eA
∗τC∗CeAτdτ
est définie positive ∀tiii) La matrice d’observabilité
O =
C
CA...
CAn−1
est de rang complet par les colonnes.
iv) La matrice(
A− λIC
)est de rang complet par les colonnes
∀λ ∈ C
B. CHERKI () Réduction des Modèles linéaires Oran 12 / 57
-
Critères d’Observabilité
ThéorèmeLes assertions suivantes sont equivalentes :
i) (C, A) est observableii) La matrice
Wo :=∫ t
0eA
∗τC∗CeAτdτ
est définie positive ∀tiii) La matrice d’observabilité
O =
C
CA...
CAn−1
est de rang complet par les colonnes.
iv) La matrice(
A− λIC
)est de rang complet par les colonnes
∀λ ∈ C
B. CHERKI () Réduction des Modèles linéaires Oran 12 / 57
-
Critères d’Observabilité
ThéorèmeLes assertions suivantes sont equivalentes :
i) (C, A) est observableii) La matrice
Wo :=∫ t
0eA
∗τC∗CeAτdτ
est définie positive ∀tiii) La matrice d’observabilité
O =
C
CA...
CAn−1
est de rang complet par les colonnes.
iv) La matrice(
A− λIC
)est de rang complet par les colonnes
∀λ ∈ C
B. CHERKI () Réduction des Modèles linéaires Oran 12 / 57
-
Critères d’Observabilité
ThéorèmeLes assertions suivantes sont equivalentes :
i) (C, A) est observableii) La matrice
Wo :=∫ t
0eA
∗τC∗CeAτdτ
est définie positive ∀tiii) La matrice d’observabilité
O =
C
CA...
CAn−1
est de rang complet par les colonnes.
iv) La matrice(
A− λIC
)est de rang complet par les colonnes
∀λ ∈ C
B. CHERKI () Réduction des Modèles linéaires Oran 12 / 57
-
Critères d’Observabilité
ThéorèmeLes assertions suivantes sont equivalentes :
i) (C, A) est observableii) La matrice
Wo :=∫ t
0eA
∗τC∗CeAτdτ
est définie positive ∀tiii) La matrice d’observabilité
O =
C
CA...
CAn−1
est de rang complet par les colonnes.
iv) La matrice(
A− λIC
)est de rang complet par les colonnes
∀λ ∈ C
B. CHERKI () Réduction des Modèles linéaires Oran 12 / 57
-
Critères d’observabilité (suite)
Théorème (suite)v) Soient λ et y n’importe quelle valeur propre et n’importe quelle
vecteur propre à droite de A ie Ay = λy alors Cy 6= 0vi) Les valeurs propres de (A + LC) peuvent être placées librement
par un choix judicieux de Lvii) (A∗,C∗) est commandable.
B. CHERKI () Réduction des Modèles linéaires Oran 13 / 57
-
Critères d’observabilité (suite)
Théorème (suite)v) Soient λ et y n’importe quelle valeur propre et n’importe quelle
vecteur propre à droite de A ie Ay = λy alors Cy 6= 0vi) Les valeurs propres de (A + LC) peuvent être placées librement
par un choix judicieux de Lvii) (A∗,C∗) est commandable.
B. CHERKI () Réduction des Modèles linéaires Oran 13 / 57
-
Critères d’observabilité (suite)
Théorème (suite)v) Soient λ et y n’importe quelle valeur propre et n’importe quelle
vecteur propre à droite de A ie Ay = λy alors Cy 6= 0vi) Les valeurs propres de (A + LC) peuvent être placées librement
par un choix judicieux de Lvii) (A∗,C∗) est commandable.
B. CHERKI () Réduction des Modèles linéaires Oran 13 / 57
-
Critères d’observabilité (suite)
Théorème (suite)v) Soient λ et y n’importe quelle valeur propre et n’importe quelle
vecteur propre à droite de A ie Ay = λy alors Cy 6= 0vi) Les valeurs propres de (A + LC) peuvent être placées librement
par un choix judicieux de Lvii) (A∗,C∗) est commandable.
B. CHERKI () Réduction des Modèles linéaires Oran 13 / 57
-
Invariance de la Commadabilité et l’Observabilité
Les matrices de commandabilité et d’observabilité deviennent
C =[
TB TAT−1TB · · · TAn−1T−1TB]
= TCO = OT−1 (2)
Donc la commandabilité et l’observabilité ne changent pas parchangement de coordonnées.
B. CHERKI () Réduction des Modèles linéaires Oran 14 / 57
-
Réduction des états non commandables
Si la matrice de commandabilité C est de rang k1 < n alors il existe
une transformation de similitude x =(
xcxc
)= Tx tel que
(ẋcẋc
)=
(Ac A120 Ac
)(xcxc
)+
(Bc0
)u (3)
y =(
Cc Cc)( xc
xc
)+ Du
Avec Ac ∈ Rk1×k1 et (Ac ,Bc) commandable. De plus
G(s) = C(sI − A)−1B + D = Cc(sI − Ac)−1Bc + D
B. CHERKI () Réduction des Modèles linéaires Oran 15 / 57
-
Exemple
A =
0 1 00 0 1−6 −11 −6
b = 01−3
C = 0 1 −31 −3 7−3 7 −15
elleest de rang 2, le système n’est pas commandable.
SoitQ =
0 1 01 −3 0−3 7 1
= T−1 alorsTAT−1 =
0 −2 11 −3 00 0 −3
Tb = 10
0
B. CHERKI () Réduction des Modèles linéaires Oran 16 / 57
-
Réduction des états non observables
Si la matrice de d’observabilité O à un rang k2 < n alors il existe unetransformation de similitude telle que
[TAT−1 TBCT−1 D
]=
Ao 0A21 Ao BoBoCo 0 D
avec Ao ∈ Rk2×k2 , (Co,Ao) observable. De plus
G(s) = C(sI − A)−1B + D = C0(sI − Ao)−1Bo + D
B. CHERKI () Réduction des Modèles linéaires Oran 17 / 57
-
Réduction des états non commandables et nonobservables
Si C est de rang k1 < n et O à un rang k2 < n Alors il existe unetransformation x = Tx (T non singulière) telle que :
ẋcoẋcoẋcoẋco
=
Aco 0 A13 0A12 Aco A23 A240 0 Aco 00 0 A43 Aco
xcoxcoxcoxco
+
BcoBco00
u
y =(
Cco 0 Cco 0)
xcoxcoxcoxco
+ DuG(s) = Cco(sI − Aco)−1Bco + D
B. CHERKI () Réduction des Modèles linéaires Oran 18 / 57
-
Réalisation minimale
(A,B,C,D) est appelée réalisation de G(s), une réalisation est diteminimale si à la fois elle est commandable et observable d’après ledécomposition précédente.
B. CHERKI () Réduction des Modèles linéaires Oran 19 / 57
-
Décomposition en Valeurs Singulières
Soit A ∈ Rm×n alors il existe des matrices unitaires
U = [u1,u2, · · · ,um] ∈ Rm×m
V = [v1, v2, · · · , vn] ∈ Rn×n
tel que
A = UΣV ∗, Σ =[
Σ1 00 0
]où
Σ1 =
σ1 0 · · · 00 σ2 · · · 0...
.... . .
...0 0 · · · σp
et
σ1 ≥ σ2 ≥ · · · ≥ σp ≥ 0, p = min(m,n)
B. CHERKI () Réduction des Modèles linéaires Oran 20 / 57
-
Quelques propriètés de la SVD
σ̄(A) = max‖x‖=1
‖Ax‖
σ(A) = min‖x‖=1
‖Ax‖
σ̄(A−1) =1σ
(A)siAinversible
Si A et ∆ sont des matrices carrés alors :
|σ(A + ∆)− σ(A)| ≤ σ̄(∆)
σ(A∆) ≥ σ(A)σ(∆)
B. CHERKI () Réduction des Modèles linéaires Oran 21 / 57
-
Propriètés de la SVD (suite)
Soit A ∈ Fm×n et
σ1 ≥ σ2 · · · ≥ σr > σr+1 = · · · = 0, r ≤ min (r ,n)
alors :
1 rang(A) = r2 ker A = span{vr+1, · · · , vn} et
(ker A)⊥ = span{v1, · · · , vr}3 ImA = span{u1, · · · ,ur} et
(ImA)⊥ = span{ur+1, · · · ,um}4 ‖A‖ = σ1
B. CHERKI () Réduction des Modèles linéaires Oran 22 / 57
-
Propriètés de la SVD (suite)
Soit A ∈ Fm×n et
σ1 ≥ σ2 · · · ≥ σr > σr+1 = · · · = 0, r ≤ min (r ,n)
alors :
1 rang(A) = r2 ker A = span{vr+1, · · · , vn} et
(ker A)⊥ = span{v1, · · · , vr}3 ImA = span{u1, · · · ,ur} et
(ImA)⊥ = span{ur+1, · · · ,um}4 ‖A‖ = σ1
B. CHERKI () Réduction des Modèles linéaires Oran 22 / 57
-
Propriètés de la SVD (suite)
Soit A ∈ Fm×n et
σ1 ≥ σ2 · · · ≥ σr > σr+1 = · · · = 0, r ≤ min (r ,n)
alors :
1 rang(A) = r2 ker A = span{vr+1, · · · , vn} et
(ker A)⊥ = span{v1, · · · , vr}3 ImA = span{u1, · · · ,ur} et
(ImA)⊥ = span{ur+1, · · · ,um}4 ‖A‖ = σ1
B. CHERKI () Réduction des Modèles linéaires Oran 22 / 57
-
Propriètés de la SVD (suite)
Soit A ∈ Fm×n et
σ1 ≥ σ2 · · · ≥ σr > σr+1 = · · · = 0, r ≤ min (r ,n)
alors :
1 rang(A) = r2 ker A = span{vr+1, · · · , vn} et
(ker A)⊥ = span{v1, · · · , vr}3 ImA = span{u1, · · · ,ur} et
(ImA)⊥ = span{ur+1, · · · ,um}4 ‖A‖ = σ1
B. CHERKI () Réduction des Modèles linéaires Oran 22 / 57
-
Équations de Lyapunov
A∗X + XA + Q = 0AX + XA∗ + Q = 0
ThéorèmeSupposons A et Q des matrices carrées et A Hurwitzienne, alors :
X =∫ ∞
0eA
∗τQeAτdτ
est l’unique solution de l’équation de Lyapunov A∗X + XA + Q = 0
B. CHERKI () Réduction des Modèles linéaires Oran 23 / 57
-
Équations de Lyapunov
A∗X + XA + Q = 0AX + XA∗ + Q = 0
ThéorèmeSupposons A et Q des matrices carrées et A Hurwitzienne, alors :
X =∫ ∞
0eA
∗τQeAτdτ
est l’unique solution de l’équation de Lyapunov A∗X + XA + Q = 0
B. CHERKI () Réduction des Modèles linéaires Oran 23 / 57
-
Preuve
L’intǵrale converge car A est hurwitzienneA∗X + XA =
∫∞0
ddt (e
A∗τQeAτ )dτ = −QΠ : Rn×n → Rn×n définie par :Π(X ) = A∗X + XA où X ∈ Rn×n∀Q ∈ Rn×n l’équation Π(X ) = −Q possède une solution, cela veut direque que la dimension de l’image de Π est n2 mais la dimension dudomaine de Π est aussi n2 et donc ker Π = 0 et donc l’équationΠ(X ) = −Q possède une unique solution pour chaque Q.
B. CHERKI () Réduction des Modèles linéaires Oran 24 / 57
-
Équations de Lyapunov
ThéorèmeSupposons Q > 0, alors A est Hurwitzienne si et seulement si il existeune solution X > 0 à l’équation de Lyapunov A∗X + XA + Q = 0
Le résultat précédent reste vrai si l’hypothèse Q > 0 est remplacée parQ = C∗C ≥ 0 avec (C,A) observable, dans ce cas la solution del’équation de Lyapunov est notée Yo et vérifie A∗X + XA + C∗C = 0 etest appelée le Gramien d’observabilité de (C,A).
B. CHERKI () Réduction des Modèles linéaires Oran 25 / 57
-
Opérateur et Gramien d’observabilité
ẋ(t) = Ax(t , x(0) = x0 ∈ Rn,A Hurwitzy(t) = Cx(t)
y(t) = CeAtx0 pour t ≥ 0On définit l’opérateur d’observabilité par Ψo : Rn → L2[0∞) par
x0 7→{
CeAtx0 pour t ≥ 00, autrement
B. CHERKI () Réduction des Modèles linéaires Oran 26 / 57
-
Opérateur et Gramien d’observabilité
On peut montrer que
|CeAtx0| ≤ βe−αt |x0|
quelque soit x0 et t . Si l’on pose y = Ψox0 nous obtenons‖y‖ ≤ β√
2α|x0| donc y ∈ L2[0,∞) et Ψo est un opérateur borné.
L’énergie contenue dans le signal y = Ψox0, pour x0 ∈ Rn, est donnéepar :
‖y‖2 = 〈Ψox0,Ψox0〉 = 〈x0,Ψ∗oΨox0〉
, où Ψ∗o : L2[0,∞)→ Rn est l’adjoint de Ψo.
B. CHERKI () Réduction des Modèles linéaires Oran 27 / 57
-
Ψ∗oz =∫ ∞
0eA
∗τC∗z(τ)(τ)dτ
pour z ∈ L2[,∞) la norme de y = Ψox0 est donné par 〈x0,Ψ∗oΨox0〉
Ψ∗o(Ψox0) =∫ ∞
0eA
∗τC∗CeAτx0dτ (4)
=
(∫ ∞0
eA∗τC∗CeAτdτ
)x0 = (Ψ∗oΨo) x0
Donc l’opérateur Ψ∗oΨo est donné par la matrice :
Yo = Ψ∗oΨo =∫ ∞
0eA
∗τC∗CeAτdτ
,c’est le Gramien d’observabilité
B. CHERKI () Réduction des Modèles linéaires Oran 28 / 57
-
Représentation d’une ellipsoïde
Soit M : U → Rn et Z = MM∗Alors
E1 = {x ∈ Rn; x∗Z−1x ≤ 1}
E2 = {Z12 y ; y ∈ Rn, ‖y‖2 ≤ 1}
E3 = {Mu; u ∈ U , ‖u‖2 ≤ 1}
Représentent le même ellipsoide, les λi sont les valeurs propres de Z
B. CHERKI () Réduction des Modèles linéaires Oran 29 / 57
-
Ellipsoïde d’Observabilité
L’énergie contenue dans le signal de sortie y = Ψox0 à partir de lacondition initiale x0 ∈ Cn est donnée par
‖y‖2 = x∗0 Yox0
Le Gramien "mesure" combien est observable un état initial
Y12
o x0 où x0 est de longueur unité, ce vecteur possède une longueurégale à la norme 2 de y .
Eo = {Y12
o x0 : x0 ∈ Rnet|x0| = 1}
Comme Yo est semi défini positif, cet ensemble est une ellipsoïde etindique la norme de sortie associée à une direction particulière del’espace d’état
B. CHERKI () Réduction des Modèles linéaires Oran 30 / 57
-
Ellipsoïde d’Observabilité
Soientη1 ≥ η2 ≥ · · · ≥ ηn ≥ 0
les valeurs propres de Y12
o et v1, · · · , vn les vecteurs propresnormalisés correspondants. Alors vk donne les directions des axesprincipaux de l’ellipsoide et ηk la longeur de ces axes.ηk = 0⇒ le vecteur vk correspondant ne produit aucune énergie ensortie et sera donc non observable.
B. CHERKI () Réduction des Modèles linéaires Oran 31 / 57
-
Ellipsoïde d’Observabilité
Si ηk >> ηl ⇒ "l’énergie en sortie due à vk >> l’énergie en sortie dueà vl " Donc on peut penser supprimer les états peu observables.
Un état peut être faiblement observable mais fortement commandable !
B. CHERKI () Réduction des Modèles linéaires Oran 32 / 57
-
Opérateur et Gramien de Commandabilité
L’opérateur de commandabilité est définit par : Ψc : L2(−∞,0]→ Rnpar
u 7→∫ 0−∞
e−AτBu(τ)dτ
Interprétation :
ẋ(t) = Ax(t) + Bu(t), x(−∞) = 0 (5)
u ∈ L2(−∞,0] où la sortie est le vecteur x(0)
B. CHERKI () Réduction des Modèles linéaires Oran 33 / 57
-
Interprétation énergétique
Étant donné la condition finale x(0) ∈ Rn avec la norme |x0| = 1, quelu ∈ L2(−∞,0] résoud l’équation
Ψcu = x0
avec la norme minimale ‖u‖?En d’autres termes quelle est l’entrée deplus faible énergie ‖u‖ qui transfère l’état à x(0) = x0 à l’instant t = 0
B. CHERKI () Réduction des Modèles linéaires Oran 34 / 57
-
ThéorèmeSupposons (A,B) commandable, alors :
i) La matrice ΨcΨ∗c = Xc est non singulièreii) pour n’importe quel x0 ∈ Rn, l’entrée uopt := Ψ∗cX−1c x0 est
l’élement de norme minimale dans l’ensemble{u ∈ L2(−∞,0],Ψcu = x0}.
B. CHERKI () Réduction des Modèles linéaires Oran 35 / 57
-
ThéorèmeSupposons (A,B) commandable, alors :
i) La matrice ΨcΨ∗c = Xc est non singulièreii) pour n’importe quel x0 ∈ Rn, l’entrée uopt := Ψ∗cX−1c x0 est
l’élement de norme minimale dans l’ensemble{u ∈ L2(−∞,0],Ψcu = x0}.
B. CHERKI () Réduction des Modèles linéaires Oran 35 / 57
-
ThéorèmeSupposons (A,B) commandable, alors :
i) La matrice ΨcΨ∗c = Xc est non singulièreii) pour n’importe quel x0 ∈ Rn, l’entrée uopt := Ψ∗cX−1c x0 est
l’élement de norme minimale dans l’ensemble{u ∈ L2(−∞,0],Ψcu = x0}.
B. CHERKI () Réduction des Modèles linéaires Oran 35 / 57
-
Le théorème nous dit que pour atteindre x0, uopt = Ψ∗cX−1c x0 est la
commande la plus économique en termes d’énergie, cette énergie estdonnée par
‖uopt‖2 = 〈Ψ∗cX−1c x0,Ψ∗cX−1c x0〉 (6)= 〈X−1c x0,ΨcΨ∗cX−1c x0〉= x∗0 X
−1c x0
B. CHERKI () Réduction des Modèles linéaires Oran 36 / 57
-
ThéorèmeLes ensembles suivants sont égaux
a) {Ψcu : u ∈ L2(−∞,0]et‖u‖ ≤ 1}
b) {X12
c xc : xc ∈ Rnet|xc | ≤ 1}
Cela veut dire que les états atteignables avec u vérifiant ‖u‖ ≤ 1 sontdonnés par
X12
c xc
où xc vérifie |xc | ≤ 1 La norme de n’importe quel état de ce type estx∗c Xcxc
B. CHERKI () Réduction des Modèles linéaires Oran 37 / 57
-
ThéorèmeLes ensembles suivants sont égaux
a) {Ψcu : u ∈ L2(−∞,0]et‖u‖ ≤ 1}
b) {X12
c xc : xc ∈ Rnet|xc | ≤ 1}
Cela veut dire que les états atteignables avec u vérifiant ‖u‖ ≤ 1 sontdonnés par
X12
c xc
où xc vérifie |xc | ≤ 1 La norme de n’importe quel état de ce type estx∗c Xcxc
B. CHERKI () Réduction des Modèles linéaires Oran 37 / 57
-
ThéorèmeLes ensembles suivants sont égaux
a) {Ψcu : u ∈ L2(−∞,0]et‖u‖ ≤ 1}
b) {X12
c xc : xc ∈ Rnet|xc | ≤ 1}
Cela veut dire que les états atteignables avec u vérifiant ‖u‖ ≤ 1 sontdonnés par
X12
c xc
où xc vérifie |xc | ≤ 1 La norme de n’importe quel état de ce type estx∗c Xcxc
B. CHERKI () Réduction des Modèles linéaires Oran 37 / 57
-
Ellipsoïde de Commandabilité
on définit l’ellipsoide de commandabilité par :
Ec = {X12
c xc : xc ∈ Rnet|xc | = 1}
Soient µ1 ≥ µ2 ≥ · · · ≥ µn ≥ 0, les valeurs propres de X12
cv1, · · · , vn les vecteurs propres orthonormés correspondantsSi µk = 0 alors l’état vk est non atteignable.Si µk >> µl alors la direction vk est plus commandable que la directionvl .
B. CHERKI () Réduction des Modèles linéaires Oran 38 / 57
-
Réalisations équilibrées
Ellipsoides de Commandabilité et observabilité
Une direction peu commandable pourrait être très observableChangement de coordonnées pour aligner les deux ellipsoides
B. CHERKI () Réduction des Modèles linéaires Oran 39 / 57
-
Réalisations équilibrées
Ellipsoides de Commandabilité et observabilité
Une direction peu commandable pourrait être très observableChangement de coordonnées pour aligner les deux ellipsoides
B. CHERKI () Réduction des Modèles linéaires Oran 39 / 57
-
Réalisations équilibrées
(A,B,C) −→ (Ã = TAT−1, B̃ = TB, C̃ = CT−1) avec T une matrice dechangement de coordonnées
X̃c =∫ ∞
0eÃτ B̃B̃∗eÃ
∗τdτ (7)
=
∫ ∞0
TeAτT−1TBB∗T ∗(T ∗)−1eA∗τT ∗dτ
= TXcT ∗
de mêmeỸo = (T ∗)−1YoT−1
B. CHERKI () Réduction des Modèles linéaires Oran 40 / 57
-
Réalisations équilibrées
Théorème
Étant donné deux matrices définies positives X et Y , il existe unematrice non singulière telle que
TXT ∗ = (T ∗)−1YT−1 = Σ
où Σ est une matrice diagonale définie positive.
CorrolaireSupposons (A,B,C) une réalisation commandable et observable,alors il existe une transformation d’état T telle que la réalisationéquivalente (Ã, B̃, C̃) = (TAT−1,TB,CT−1) vérifie
X̃c = Ỹo = Σ avec Σ > 0diagonal.
B. CHERKI () Réduction des Modèles linéaires Oran 41 / 57
-
Réalisations équilibrées
Théorème
Étant donné deux matrices définies positives X et Y , il existe unematrice non singulière telle que
TXT ∗ = (T ∗)−1YT−1 = Σ
où Σ est une matrice diagonale définie positive.
CorrolaireSupposons (A,B,C) une réalisation commandable et observable,alors il existe une transformation d’état T telle que la réalisationéquivalente (Ã, B̃, C̃) = (TAT−1,TB,CT−1) vérifie
X̃c = Ỹo = Σ avec Σ > 0diagonal.
B. CHERKI () Réduction des Modèles linéaires Oran 41 / 57
-
Rálisations équilibrées
ThéorèmeEtant donné les matrices définies positives X et Y alors il existe T nonsingulière T telle que
a) TXT ∗ =
Σ1
Σ20
0
b) (T ∗)−1YT−1 =
Σ1
0Σ3
0
où les matrices Σk sont diagonales définies positives.
B. CHERKI () Réduction des Modèles linéaires Oran 42 / 57
-
Rálisations équilibrées
ThéorèmeEtant donné les matrices définies positives X et Y alors il existe T nonsingulière T telle que
a) TXT ∗ =
Σ1
Σ20
0
b) (T ∗)−1YT−1 =
Σ1
0Σ3
0
où les matrices Σk sont diagonales définies positives.
B. CHERKI () Réduction des Modèles linéaires Oran 42 / 57
-
Rálisations équilibrées
ThéorèmeEtant donné les matrices définies positives X et Y alors il existe T nonsingulière T telle que
a) TXT ∗ =
Σ1
Σ20
0
b) (T ∗)−1YT−1 =
Σ1
0Σ3
0
où les matrices Σk sont diagonales définies positives.
B. CHERKI () Réduction des Modèles linéaires Oran 42 / 57
-
Rálisations équilibrées
Sous une telle transformation la matrice d’état à aura la forme :
à =
Ã1 0 Ã6 0Ã2 Ã3 Ã4 Ã50 0 Ã7 00 0 Ã8 Ã9
C’est la décomposition de Kalman.
B. CHERKI () Réduction des Modèles linéaires Oran 43 / 57
-
Opérateur de Hankel
ΓG = ΨoΨc
ThéorèmeLa norme de ΓG est donnée par :
‖ΓG‖L2→L2 = (λmax (YoXc))12
où Yo et Xc sont les Gramiens de la réalisation minimale (A,B,C)
Les valeurs propres de YoXc sont appelées les valeurs singulières deΓG ou les valeurs singulières de Hankel du système G. on note cesvaleurs singulièrs σ1 ≥ σ2 ≥ · · · ≥ 0
B. CHERKI () Réduction des Modèles linéaires Oran 44 / 57
-
Opérateur de Hankel
Les valeurs singulièrs de Hankel sont les mêmes pour des réalisationséquivalentes. En effet
Ỹo = (T−1)∗YoT−1 (8)X̃c = TxcT ∗
et doncỸoX̃c = (T−1)∗YoXcT ∗
, donc ỸoX̃c et YoXc sont reliés par une transformation de similitude etdonc elles ont les mêmes valeurs propres.
B. CHERKI () Réduction des Modèles linéaires Oran 45 / 57
-
Opérateur de Hankel
Théorème
Supposons G(s) = C(sI − A)−1B et que A est Hurwitzienne alors :
‖G‖∞ ≤ 2(σ1 + · · ·+ σn)
où les σk sont les valeurs singulières de Hankel de G
B. CHERKI () Réduction des Modèles linéaires Oran 46 / 57
-
Réduction de modèles
Réduction de modèles
Le problème se pose comme suit :
Donnée : Matrice de transfert G(s) =[
A BC D
]où A ∈ Rn×n est
hurwitzienne
Trouver une matrice d’ordre plus faible Gr (s) =[
Ar BrCr Dr
]où
Ar ∈ Rr×r et Hurwitziennetel que
‖G −Gr‖∞soit minimisée.
B. CHERKI () Réduction des Modèles linéaires Oran 47 / 57
-
Réduction de modèles
Réduction de modèles
Le problème se pose comme suit :
Donnée : Matrice de transfert G(s) =[
A BC D
]où A ∈ Rn×n est
hurwitzienne
Trouver une matrice d’ordre plus faible Gr (s) =[
Ar BrCr Dr
]où
Ar ∈ Rr×r et Hurwitziennetel que
‖G −Gr‖∞soit minimisée.
B. CHERKI () Réduction des Modèles linéaires Oran 47 / 57
-
Réduction de modèles
Limitations
LemmeSupposons N ∈ Rn×n avec les valeurs singilières σ1 ≥ σ2 ≥ · · · ≥ σn.Alors pour n’importe quelle matrice R ∈ Rn×n, rang(R) ≤ r < n
σ̄(N − R) ≥ σr+1
B. CHERKI () Réduction des Modèles linéaires Oran 48 / 57
-
Réduction de modèles
Limitations
ThéorèmeSoient σ1 ≥ σ2 ≥ · · · ≥ σr ≥ σr+1 · · · ≥ σn ≥ 0 les valeurs singulièresde Hankel associées à la fonction de transfert G ∈ RH∞ Alors pourn’importe quel Gr d’ordre r < n , l’inégalité suivante
‖G −Gr‖∞ ≥ σr+1
est vérifiée
B. CHERKI () Réduction des Modèles linéaires Oran 49 / 57
-
Réduction de modèles
Borne de l’erreur
ThéorèmeSupposons que les valeurs singulières de Hankel vérifient :
σ1 ≥ σ2 ≥ · · · ≥ σr > σr+1 ≥ σr+2 ≥ · · · ≥ σn.
Si Gr est obtenue par une troncature à l’ordre r d’une éalisationéquilibr̊’ee alors :
‖G −Gr‖∞ ≤ 2(σr+1 + σr+2 + · · ·+ σn)
B. CHERKI () Réduction des Modèles linéaires Oran 50 / 57
-
Réduction de modèles
Exemple 1
On considère l’exemple suivant :
g(s) =(s + 10)(s − 5)(s2 + 2s + 5)(s2 − 0.5s + 5)
(s + 4)(s2 + 4s + 8)(s2 + 0.2s + 100)(s2 + 5s + 2000)
À l’aide de Matlab on peut calculer les valeurs singulières de Hankel àl’aide de la commande sv = hankelsv(g)
sv =
0.17920.17870.10760.10750.0007
0.000080.00002
B. CHERKI () Réduction des Modèles linéaires Oran 51 / 57
-
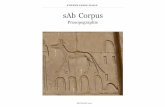
Réduction de modèles
Réduction à l’ordre 4
B. CHERKI () Réduction des Modèles linéaires Oran 52 / 57
-
Réduction de modèles
Réduction à l’ordre 2
B. CHERKI () Réduction des Modèles linéaires Oran 53 / 57
-
Réduction de modèles
Exemple 2
Modèle d’aun batiment à 8 étages, chacun ayant trois degrés deliberté soit 24 variables. Le modèle a la forme suivante :
Mq̈(t) + Cq̇(t) + Kq(t) = uv(t)
, le système peut être mis sous la forme d’état avec x =[
qq̇
]. on
s’intéresse au mouvement de la première coordonnées q1(t) doncv = [10 · · · 0]T et y(t) = q̇1(t) = x25(t)
B. CHERKI () Réduction des Modèles linéaires Oran 54 / 57
-
Réduction de modèles
Exemple 2
B. CHERKI () Réduction des Modèles linéaires Oran 55 / 57
-
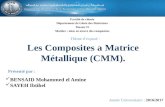
Réduction de modèles
Exemple 2 suite
B. CHERKI () Réduction des Modèles linéaires Oran 56 / 57
-
Réduction de modèles
Exemple 2 suite
B. CHERKI () Réduction des Modèles linéaires Oran 57 / 57
Réduction de modèles