PARTIE PHYSIQUE Le syst me GPS - SiteW
11
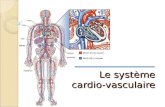
PARTIE PHYSIQUE Le système GPS Le principe du positionnement par GPS (Global Positioning System ou Géopositionnement Par Satellite) repose sur la mesure de la durée de transit d’un signal transmis par une onde électromagnétique (OEM) entre des satellites dont la position est exactement connue à tout instant, dénommés NAVSTAR (NAVigation Satellite Timing And Ranging) et un récepteur. Cette durée est ensuite simplement convertie en distance puisqu’on connaît très précisément la célérité d’une OEM. Pour une précision optimale, un récepteur sur Terre doit « voir » au minimum quatre satellites simultanément. Figure 1 – Constellation satellite GPS Public domain, http: // www. gps. gov/ multimedia/ images/ constellation. gif. Vu sur le site https: // www. maanmittauslaitos. fi/ en/ reseach/ interesting-topics/ satellite-based-positioning-systems Le système fut mis en place par le département de la Défense des États-Unis à partir de 1973, à l’origine, uniquement à des fins militaires. Avec ses vingt-quatre satellites, il est devenu totalement opérationnel en 1995. Le 2 mai 2000, le président étatsunien Bill Clinton confirme l’intérêt de la technologie à des fins civiles et autorise une diffusion non restreinte des si- gnaux GPS, permettant une précision de l’ordre d’une dizaine de mètres et une démocrati- sation de la technologie au grand public à partir du milieu des années 2000. De nos jours les récepteurs GPS se sont banalisés et ont envahi notre environnement quotidien (automobile, smartphones, montre connectée, etc). Le système comprend vingt-quatre satellites placés sur des orbites pratiquement circulaires d’altitudes voisines de 2,00 × 10 4 km (voir figure 1). Les satellites sont placés sur six orbites dont le plan est incliné de 55 ◦ par rapport au plan de l’équateur. Ces orbites sont décalées en longitude de 60 ◦ . Sur chaque orbite, il y a quatre satellites. On notera pour information que les satellites ne sont pas régulièrement espacés sur leur orbite. Leur répartition a été choisie pour optimiser le nombre de satellites visibles en chaque point de la Terre à un instant « t ». Les zones les plus défavorisées sont voisines des pôles. Sur la photo de la figure 2 prise lors de la phase finale d’assemblage, on peut se faire une idée des dimensions d’un satellite NAVSTAR munis de ses panneaux solaires en le comparant à la personne située à ses cotés. 2/24
Transcript of PARTIE PHYSIQUE Le syst me GPS - SiteW

PARTIE PHYSIQUE
Le système GPS
Le principe du positionnement par GPS (Global Positioning System ou GéopositionnementPar Satellite) repose sur la mesure de la durée de transit d’un signal transmis par une ondeélectromagnétique (OEM) entre des satellites dont la position est exactement connue à toutinstant, dénommés NAVSTAR (NAVigation Satellite Timing And Ranging) et un récepteur.Cette durée est ensuite simplement convertie en distance puisqu’on connaît très précisémentla célérité d’une OEM. Pour une précision optimale, un récepteur sur Terre doit « voir » auminimum quatre satellites simultanément.
Figure 1 – Constellation satellite GPSPublic domain, http: // www. gps. gov/ multimedia/ images/ constellation. gif.Vu sur le site https: // www. maanmittauslaitos. fi/ en/ reseach/ interesting-topics/satellite-based-positioning-systems
Le système fut mis en place par le département de la Défense des États-Unis à partir de 1973,à l’origine, uniquement à des fins militaires. Avec ses vingt-quatre satellites, il est devenutotalement opérationnel en 1995. Le 2 mai 2000, le président étatsunien Bill Clinton confirmel’intérêt de la technologie à des fins civiles et autorise une diffusion non restreinte des si-gnaux GPS, permettant une précision de l’ordre d’une dizaine de mètres et une démocrati-sation de la technologie au grand public à partir du milieu des années 2000. De nos jours lesrécepteurs GPS se sont banalisés et ont envahi notre environnement quotidien (automobile,smartphones, montre connectée, etc).Le système comprend vingt-quatre satellites placés sur des orbites pratiquement circulairesd’altitudes voisines de 2,00×104 km (voir figure 1). Les satellites sont placés sur six orbitesdont le plan est incliné de 55 par rapport au plan de l’équateur. Ces orbites sont décalées enlongitude de 60. Sur chaque orbite, il y a quatre satellites. On notera pour information que lessatellites ne sont pas régulièrement espacés sur leur orbite. Leur répartition a été choisie pouroptimiser le nombre de satellites visibles en chaque point de la Terre à un instant « t ». Leszones les plus défavorisées sont voisines des pôles. Sur la photo de la figure 2 prise lors de laphase finale d’assemblage, on peut se faire une idée des dimensions d’un satellite NAVSTARmunis de ses panneaux solaires en le comparant à la personne située à ses cotés.
2/24

Figure 2 – Satellite NAVSTARPublic domain, http: // www. gps. gov/ multimedia/ images/ constellation. gif.Vu sur le site https: // www. maanmittauslaitos. fi/ en/ research/ interesting-topics/satellite-based-positioning-systems
A/ Trajectoires de satellites
Dans tout le problème, le référentiel d’étude est le référentiel géocentrique supposé galiléen. Les don-nées nécessaires sont regroupées en annexe à la fin de l’énoncé.
Q1 - Rappeler l’expression de la force de gravitation F exercée par la Terre sur un satelliteNAVSTAR. Le centre de la Terre est situé en O. On notera r la distance OM du satellite (masseponctuelle m) placé au point M , r > RT où RT est le rayon terrestre. On exprimera F en fonc-tion de la constante de gravitation universelle G , des autres données et on utilisera le vecteurunitaire noté habituellement ur en coordonnées sphériques (figure 3).
•O y
z
x
•M
ur
F
Figure 3 – Repère sphérique
Q2 - En ne prenant en compte que cette unique force d’attraction qui s’exerce sur le satellite,montrer que :a) sa trajectoire est plane ;b) son énergie mécanique notée Em est conservée ;c) et qu’elle peut se mettre sous la forme :
Em = m2
(drdt
)2
− Ar+ B
r 2
3/24

avec A et B deux constantes positives à définir, s’exprimant en fonction de m, MT , G et de laconstante des aires C . L’énergie potentielle est prise nulle à l’infini.
Q3 - Soit la fonction Ep eff(r ) = − Ar+ B
r 2 . Tracer son allure puis prouver qu’elle passe par unminimum noté r0. Exprimer r0 en fonction de A et B puis donner sa signification physiqueainsi que l’ordre de grandeur de sa valeur numérique pour un satellite NAVSTAR placé surson orbite de travail. Comment est habituellement dénommée cette fonction Ep eff(r )?
On donne la définition d’un jour sidéral terrestre : c’est la durée que met la Terre pour faire untour sur elle-même par rapport au point vernal (point considéré comme fixe dans le référentiel hélio-centrique), indépendamment de sa révolution autour du Soleil. Elle vaut environ 23 h 56 min 4 s.
Q4 - Quelle est la période de révolution du satellite? Comparer cette valeur à celle d’un joursidéral et conclure.
Terre
V1
V2
Orbiteinitiale
Orbitefinale
Orbitede transfert
Figure 4 – Orbites circulaires et orbite de transfert
Le placement d’un satellite sur son orbite définitive s’effectue très schématiquement en troisphases (figure 4) :Phase 1 : mise en orbite basse initiale supposée circulaire, de rayon R1 = RT + h1, oùh1 = 1,50×103 km.Phase 2 : on fournit une très brève impulsion au satellite (vitesse V1 après l’impulsion) pourle placer sur une orbite elliptique dite transfert (ou d’Hohmann) dont l’apogée se trouve surl’orbite définitive.Phase 3 : une seconde impulsion permet d’atteindre l’orbite finale supposée circulaire derayon R2 où la vitesse du satellite est V2.
Q5 - Donner sans démonstration l’expressionde l’énergiemécanique Em 1 d’un satelliteNAVS-TAR de masse m = 800 kg sur son orbite basse à l’altitude h1 = 1,50×103 km. On supposel’énergie potentielle nulle à l’infini. Application numérique.
Q6 - Comparer Em 1 à Em 0 = αcos2(λ)−β, énergie mécanique du satellite posé au sol, avantson décollage, de la base de lancement située à la latitude λ. Les valeurs de α et β sontα = 8,6×107 J et β = 5,006×1010 J. Quelle est la valeur optimale pour λ? Faire l’application
44/24

avec A et B deux constantes positives à définir, s’exprimant en fonction de m, MT , G et de laconstante des aires C . L’énergie potentielle est prise nulle à l’infini.
Q3 - Soit la fonction Ep eff(r ) = − Ar+ B
r 2 . Tracer son allure puis prouver qu’elle passe par unminimum noté r0. Exprimer r0 en fonction de A et B puis donner sa signification physiqueainsi que l’ordre de grandeur de sa valeur numérique pour un satellite NAVSTAR placé surson orbite de travail. Comment est habituellement dénommée cette fonction Ep eff(r )?
On donne la définition d’un jour sidéral terrestre : c’est la durée que met la Terre pour faire untour sur elle-même par rapport au point vernal (point considéré comme fixe dans le référentiel hélio-centrique), indépendamment de sa révolution autour du Soleil. Elle vaut environ 23 h 56 min 4 s.
Q4 - Quelle est la période de révolution du satellite? Comparer cette valeur à celle d’un joursidéral et conclure.
Terre
V1
V2
Orbiteinitiale
Orbitefinale
Orbitede transfert
Figure 4 – Orbites circulaires et orbite de transfert
Le placement d’un satellite sur son orbite définitive s’effectue très schématiquement en troisphases (figure 4) :Phase 1 : mise en orbite basse initiale supposée circulaire, de rayon R1 = RT + h1, oùh1 = 1,50×103 km.Phase 2 : on fournit une très brève impulsion au satellite (vitesse V1 après l’impulsion) pourle placer sur une orbite elliptique dite transfert (ou d’Hohmann) dont l’apogée se trouve surl’orbite définitive.Phase 3 : une seconde impulsion permet d’atteindre l’orbite finale supposée circulaire derayon R2 où la vitesse du satellite est V2.
Q5 - Donner sans démonstration l’expressionde l’énergiemécanique Em 1 d’un satelliteNAVS-TAR de masse m = 800 kg sur son orbite basse à l’altitude h1 = 1,50×103 km. On supposel’énergie potentielle nulle à l’infini. Application numérique.
Q6 - Comparer Em 1 à Em 0 = αcos2(λ)−β, énergie mécanique du satellite posé au sol, avantson décollage, de la base de lancement située à la latitude λ. Les valeurs de α et β sontα = 8,6×107 J et β = 5,006×1010 J. Quelle est la valeur optimale pour λ? Faire l’application
4
numérique pour cette valeur optimale. Conclure.
Q7 - Àpartir de l’expression de l’énergiemécanique pour une trajectoire circulaire de rayon r ,on peutmontrer qu’il suffit de substituer au rayon r la valeur du demi-grand axe a de l’ellipsepour généraliser cette expression à une trajectoire elliptique. En déduire la valeur numériquede l’énergie mécanique Em 12 sur l’orbite de transfert.
On suppose que la durée d’allumage des fusées est très courte (boost) devant la période de révolutionet que le satellite n’a quasiment pas bougé durant cette phase.
Q8 - En déduire la variation de vitesse ∆V1 à appliquer au satellite pour qu’il passe de l’orbitebasse à celle de transfert. Effectuer l’application numérique.
Q9 - Quelle est la durée du transfert ? (La troisième loi de Kepler est rappelée en annexe.)
Pour réduire les coûts, on envisage d’autres trajectoires qui utilisent moins de satellites.
Q10 - Définir ce qu’on appelle un satellite géostationnaire en précisant les caractéristiquesde son orbite, son altitude, sa visibilité depuis un point donné de la Terre, son usage et touteautre donnée jugée digne d’intérêt. On pourra par exemple se poser la question si un tel satel-lite pourrait se trouver demanière permanente à la verticale d’une ville française en justifiantla réponse.
Q11 - Serait-il envisageable d’utiliser uniquement des satellites géostationnaires dans un sys-tème GPS? Expliciter votre réponse.
55/24

B/ Oscillateur à quartz
Les satellites GPS sont équipés d’horloges atomiques qui utilisent la pérennité et l’immuabi-lité de la fréquence du rayonnement électromagnétique émis par un électron lors du passaged’un niveau d’énergie à un autre pour assurer l’exactitude et la stabilité du signal oscillantqu’elle produit.
On donne la définition de la seconde du Système International d’Unités (SI), où 1Hz = 1s−1 :La fréquence de la transition hyperfine de l’état fondamental de l’atome de césium 133 non perturbé,∆νcs, est égale à 9 192 631 770 Hz.
Dans toute cette partie, on suppose que les ondes électromagnétiques se propagent dans levide à la célérité c.
Q12 - Quelle est, en eV, la différence d’énergie entre ces deux niveaux hyperfins dont il estquestion dans la définition précédente? Justifier alors le qualificatif d’hyperfin en comparantpar exemple le résultat aux différences de niveaux d’énergie de l’atome d’hydrogène donnéspar la relation En =−13,6
n2 eV avec n un entier strictement positif.
Q13 - Si on veut une précision de l’ordre de 10m lors de la mesure de localisation GPS, quelleest la précision sur la mesure de la durée du trajet de l’onde électromagnétique entre le sa-tellite et le récepteur? Une horloge atomique satisfait-elle cette exigence?
Dans un article scientifique de vulgarisation consacré au GPS, on peut lire le texte suivant :« Les effets de la courbure de l’espace-temps prédits par la théorie de la relativité d’Einstein se vérifientconcrètement sur les horloges atomiques des satellites GPS qui dérivent de 38 µs par jour. »
Q14 - Déduire de cette remarque l’ordre de grandeur de la dérive journalière en distance surun récepteur GPS si ces effets relativistes n’étaient pas pris en compte et bien entendu corri-gés systématiquement.
Q15 - Les récepteurs sont équipés, pour des raisons évidentes de coûts, d’horloge classiquesdites « à quartz », dont la dérive est d’environ ±1 seconde par mois. Cette valeur est-ellecompatible avec la précision attendue? Conclure.
Ces horloges utilisent les propriétésmécaniques et électriques (piézo-électricité) des cristauxde quartz dont le symbole et le schéma électrique équivalent sont donnés sur la figure 5.
⇔CS
RSL
Cp
Figure 5 – Modèle électrique d’un quartz
Q16 - Établir l’expression simplifiée de l’impédance complexe Z du quartz en fonction de la
66/24

B/ Oscillateur à quartz
Les satellites GPS sont équipés d’horloges atomiques qui utilisent la pérennité et l’immuabi-lité de la fréquence du rayonnement électromagnétique émis par un électron lors du passaged’un niveau d’énergie à un autre pour assurer l’exactitude et la stabilité du signal oscillantqu’elle produit.
On donne la définition de la seconde du Système International d’Unités (SI), où 1Hz = 1s−1 :La fréquence de la transition hyperfine de l’état fondamental de l’atome de césium 133 non perturbé,∆νcs, est égale à 9 192 631 770 Hz.
Dans toute cette partie, on suppose que les ondes électromagnétiques se propagent dans levide à la célérité c.
Q12 - Quelle est, en eV, la différence d’énergie entre ces deux niveaux hyperfins dont il estquestion dans la définition précédente? Justifier alors le qualificatif d’hyperfin en comparantpar exemple le résultat aux différences de niveaux d’énergie de l’atome d’hydrogène donnéspar la relation En =−13,6
n2 eV avec n un entier strictement positif.
Q13 - Si on veut une précision de l’ordre de 10m lors de la mesure de localisation GPS, quelleest la précision sur la mesure de la durée du trajet de l’onde électromagnétique entre le sa-tellite et le récepteur? Une horloge atomique satisfait-elle cette exigence?
Dans un article scientifique de vulgarisation consacré au GPS, on peut lire le texte suivant :« Les effets de la courbure de l’espace-temps prédits par la théorie de la relativité d’Einstein se vérifientconcrètement sur les horloges atomiques des satellites GPS qui dérivent de 38 µs par jour. »
Q14 - Déduire de cette remarque l’ordre de grandeur de la dérive journalière en distance surun récepteur GPS si ces effets relativistes n’étaient pas pris en compte et bien entendu corri-gés systématiquement.
Q15 - Les récepteurs sont équipés, pour des raisons évidentes de coûts, d’horloge classiquesdites « à quartz », dont la dérive est d’environ ±1 seconde par mois. Cette valeur est-ellecompatible avec la précision attendue? Conclure.
Ces horloges utilisent les propriétésmécaniques et électriques (piézo-électricité) des cristauxde quartz dont le symbole et le schéma électrique équivalent sont donnés sur la figure 5.
⇔CS
RSL
Cp
Figure 5 – Modèle électrique d’un quartz
Q16 - Établir l’expression simplifiée de l’impédance complexe Z du quartz en fonction de la
6
pulsation ω en négligeant la résistance RS et montrer qu’elle peut se mettre sous la forme :
Z ( jω) = 1jCeqω
1− ω2
ω 2S
1− ω2
ω 2P
.
Quelles sont les expressions deCeq , ωS et ωP en fonction de L,CS (associé à ωS) etCP (associéà ωP)? Tracer l’allure du module |Z | en fonction de ω.
Q17 - Les valeurs numériques du modèle d’un quartz horloger prévu pour osciller à unefréquence f0 = 215 Hz ont été mesurées avec précision et sont les suivantes :
L = 11395H ; CS = 2,071×10−15 F ; CP = 3,05pF ; RS = 28,57kΩ.
Parmi ces quatre valeurs, quelles sont celles dont l’ordre de grandeur est inhabituel ?
Q18 - Quel est l’écart relatif ωP −ωS
ωP? Commenter.
Q19 - Les quartz utilisés en horlogerie pourraient-ils convenir? Quel est l’intérêt d’avoirchoisi une puissance entière de 2?
77/24

C/ Influence de l’ionosphère
L’ionosphère est la partie de l’atmosphère située au-delà de 70 km d’altitude. Il s’agit d’unplasma raréfié, partiellement ionisé par le rayonnement solaire. L’ionisation est mesurée parla densité volumique ne d’électrons libres.
Les électrons libres, de masse me et de charge −e, présents dans l’ionosphère, interagissentavec une onde électromagnétique incidente pour modifier les caractéristiques de celle-ci, quiprésente alors, en particulier, une avance de phase et un retard de groupe par rapport à unepropagation dans le vide. On cherche ici à quantifier ces décalages puis à compenser ceux-ci.
Dans toute cette partie du problème, on négligera l’influence des cations devant celle desélectrons libres. De plus, on considérera que le plasma reste localement neutre.
On considère une onde électromagnétique plane, progressive, harmonique, se propageantdans le plasma selon un axe Ox. Les champs électrique et magnétique de l’onde, en notationcomplexe, sont donnés respectivement par :
E(x, t ) = E 0 exp[i (ωt −kx)] , B = B 0 exp[i (ωt −kx)] .
i représente l’imaginaire : i 2 =−1.
Q20 - Justifier quantitativement que le poids de l’électron est négligeable devant la force exer-cée par le champ électrique, en considérant par exemple un champ électrique ∥E∥= 1V ·m−1.Écrire l’expression de la force de Lorentz sur un électron de vitesse ve . Montrer que, pour unélectron non relativiste, on peut négliger le terme dû au champmagnétique de l’onde devantle terme dû au champ électrique. On admet que ∥B∥ est du même ordre de grandeur que pour uneonde plane progressive dans le vide.
Q21 - Écrire l’équation du mouvement d’un électron libre de vitesse (complexe) v e soumisà la seule influence du champ électrique E(x, t ) de l’onde. En déduire que le plasma possèdeune conductivité complexe γ= ne e2
i meω. Quelle interprétation énergétique peut-on donner au
caractère imaginaire pur de la conductivité (on ne demande pas de démonstration)?
Q22 - Écrire les équations de Maxwell dans un milieu localement neutre et de conductivitéγ. En déduire l’équation de propagation pour le champ électrique E(x, t ) puis l’équation dedispersion :
k2 =ω2 −ω2
p
c2 ,
où la pulsation plasma ωp a pour expression ωp =√
e2ne
ε0me.
88/24

C/ Influence de l’ionosphère
L’ionosphère est la partie de l’atmosphère située au-delà de 70 km d’altitude. Il s’agit d’unplasma raréfié, partiellement ionisé par le rayonnement solaire. L’ionisation est mesurée parla densité volumique ne d’électrons libres.
Les électrons libres, de masse me et de charge −e, présents dans l’ionosphère, interagissentavec une onde électromagnétique incidente pour modifier les caractéristiques de celle-ci, quiprésente alors, en particulier, une avance de phase et un retard de groupe par rapport à unepropagation dans le vide. On cherche ici à quantifier ces décalages puis à compenser ceux-ci.
Dans toute cette partie du problème, on négligera l’influence des cations devant celle desélectrons libres. De plus, on considérera que le plasma reste localement neutre.
On considère une onde électromagnétique plane, progressive, harmonique, se propageantdans le plasma selon un axe Ox. Les champs électrique et magnétique de l’onde, en notationcomplexe, sont donnés respectivement par :
E(x, t ) = E 0 exp[i (ωt −kx)] , B = B 0 exp[i (ωt −kx)] .
i représente l’imaginaire : i 2 =−1.
Q20 - Justifier quantitativement que le poids de l’électron est négligeable devant la force exer-cée par le champ électrique, en considérant par exemple un champ électrique ∥E∥= 1V ·m−1.Écrire l’expression de la force de Lorentz sur un électron de vitesse ve . Montrer que, pour unélectron non relativiste, on peut négliger le terme dû au champmagnétique de l’onde devantle terme dû au champ électrique. On admet que ∥B∥ est du même ordre de grandeur que pour uneonde plane progressive dans le vide.
Q21 - Écrire l’équation du mouvement d’un électron libre de vitesse (complexe) v e soumisà la seule influence du champ électrique E(x, t ) de l’onde. En déduire que le plasma possèdeune conductivité complexe γ= ne e2
i meω. Quelle interprétation énergétique peut-on donner au
caractère imaginaire pur de la conductivité (on ne demande pas de démonstration)?
Q22 - Écrire les équations de Maxwell dans un milieu localement neutre et de conductivitéγ. En déduire l’équation de propagation pour le champ électrique E(x, t ) puis l’équation dedispersion :
k2 =ω2 −ω2
p
c2 ,
où la pulsation plasma ωp a pour expression ωp =√
e2ne
ε0me.
8
0 200 400 600 800 10000 ·100
2 ·1011
4 ·1011
6 ·1011
8 ·1011
1 ·1012
z (km)
ne(m
−3)
Figure 6 – Densité d’électrons libres en fonction de l’altitude.
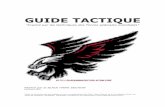
Q23 - La figure 6 présente la densité d’électrons libres ne en fonction de l’altitude z. Commentinterpréter la croissance de cette densité pour les altitudes z < 350km? Pourquoi chute-t-ellepour les altitudes plus élevées?
Q24 - Évaluer la fréquence plasma fp déduite de la pulsation plasmaωp pour la densitémaxi-male d’électrons libres. Quelle est la bande de fréquence utilisable pour les communicationsentre un satellite dont l’altitude est supérieure à 1 000 km et la Terre?On considère dans toute la suite que l’on se situe dans cette bande de fréquence.
Q25 - Exprimer la vitesse de phase vϕ des ondes électromagnétiques dans le plasma en fonc-tion de f , c et fp . En déduire l’expression de l’indice optique n = c
vϕen fonction de f et de
fp . Quelle est la particularité de cet indice?
La fréquence de l’onde électromagnétique est f1 = 1575 MHz.
Q26 - Montrer que l’indice optique local peut s’écrire :
n ≈ 1−ane
f 21
,
où a = e2
8π2meε0. Tracer sur la figure du cahier réponses la fonction (n(z)−1)×105 après avoir
évalué ses extrema.
On suppose que l’ionosphère s’arrête à l’altitude H0 = 1000 km.
Q27 - On a tracé figure 7 deux trajets possibles d’une onde électromagnétique harmoniquetraversant l’ionosphère et soumis à la variation de l’indice optique (le tracé pointillé correspondà la ligne droite depuis le satellite. On néglige la rotondité de la Terre). Quel est le bon tracé? Justifier.
99/24

ionosphère
sol
z
1 000 km
70 km
350 km
Satellite
(a)
ionosphère
sol
z
1 000 km
70 km
350 km
Satellite
(b)
Figure 7 – Deux trajets possibles d’une onde traversant l’ionosphère.
On considère un paquet d’ondes de fréquence centrale f1 émis par un satellite en haute alti-tude (z > H0 = 1000 km) et reçu par un récepteur au sol (z = 0) à la verticale du satellite. Onnote τ1 le retard provoqué par la présence de l’ionosphère par rapport à une onde qui se pro-pagerait dans le vide selon le même trajet et L1 = cτ1 l’erreur de distance due à l’ionosphère.
Q28 - Montrer que τ1 =1c
∫H0
0
(c
vg−1
)dz où vg est la vitesse de groupe de l’onde.
Sachant que vg = c
√√√√1−f 2
p
f 21
, montrer que L1 ≈a
f 21
CET où CET =∫H0
0ne dz est appelé «Contenu
Électronique Total de l’ionosphère ».Q29 - Estimer leCET en m−2 pour la densité ne de la figure 6 et en déduire l’erreur de distanceL1 provoquée par l’ionosphère. Commenter.La valeur du CET fluctue principalement selon l’activité solaire et l’alternance jour-nuit. Lacorrection nécessaire ne peut être connue en temps réel si l’on n’utilise qu’une seule fréquencede signal. C’est pourquoi les signaux GPS utilisent deux fréquences, f1 et f2 = 1228 MHz.Q30 - Soit τret = τ1 −τ2 le retard de réception entre les deux signaux de fréquences f1 et f2.Montrer que la mesure de τret permet de déterminer le CET à une date donnée. Applicationnumérique : on mesure τret = 6,7×10−7 s. Calculer l’erreur L1.
1010/24

ionosphère
sol
z
1 000 km
70 km
350 km
Satellite
(a)
ionosphère
sol
z
1 000 km
70 km
350 km
Satellite
(b)
Figure 7 – Deux trajets possibles d’une onde traversant l’ionosphère.
On considère un paquet d’ondes de fréquence centrale f1 émis par un satellite en haute alti-tude (z > H0 = 1000 km) et reçu par un récepteur au sol (z = 0) à la verticale du satellite. Onnote τ1 le retard provoqué par la présence de l’ionosphère par rapport à une onde qui se pro-pagerait dans le vide selon le même trajet et L1 = cτ1 l’erreur de distance due à l’ionosphère.
Q28 - Montrer que τ1 =1c
∫H0
0
(c
vg−1
)dz où vg est la vitesse de groupe de l’onde.
Sachant que vg = c
√√√√1−f 2
p
f 21
, montrer que L1 ≈a
f 21
CET où CET =∫H0
0ne dz est appelé «Contenu
Électronique Total de l’ionosphère ».Q29 - Estimer leCET en m−2 pour la densité ne de la figure 6 et en déduire l’erreur de distanceL1 provoquée par l’ionosphère. Commenter.La valeur du CET fluctue principalement selon l’activité solaire et l’alternance jour-nuit. Lacorrection nécessaire ne peut être connue en temps réel si l’on n’utilise qu’une seule fréquencede signal. C’est pourquoi les signaux GPS utilisent deux fréquences, f1 et f2 = 1228 MHz.Q30 - Soit τret = τ1 −τ2 le retard de réception entre les deux signaux de fréquences f1 et f2.Montrer que la mesure de τret permet de déterminer le CET à une date donnée. Applicationnumérique : on mesure τret = 6,7×10−7 s. Calculer l’erreur L1.
10
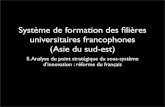
La figure 8 présente deux cartes de CET calculées en temps réel et disponibles en ligne.L’échelle à droite représente la valeur de CET exprimée en TECU, 1TECU = 1×1016 m−2.
Figure 8 – Cartes de CET
Crédits : Courtesy NASA/JPL-Caltech.Vu le 20 octobre 2019 sur le site https ://iono.jpl.nasa.gov/
Q31 - Quel est le principe d’obtention de cette carte en temps réel ? Commenter et expliquerl’évolution entre les deux cartes.
1111/24

Annexe
Constantes fondamentales :
Célérité de la lumière dans le vide : c = 299792458m ·s−1
Constante de Planck : h = 6,62607015×10−34 J ·s
Charge élémentaire : e = 1,602176634×10−19 C
Constante de gravitation universelle : G = 6,67430×10−11 USI
Formulaire :
Masse de la Terre : MT = 5,9722×1024 kg
Rayon terrestre : RT = 6,371×103 km
Masse de l’électron : me = 9,109×10−31 kg
Permittivité du vide : ε0 = 8,85×10−12 F ·m−1
Troisième loi de Kepler :T 2
a3 = 4π2
GMT,
où T est la période révolution et a le demi-grand axe de l’ellipse.
Opérateurs différentiels :
rot(rot A) = grad(div A)− ∆A.
Développements limités :#
1−ϵ≃ 1− ϵ
2;
1#
1−ϵ≃ 1+ ϵ
2.
1212/24