Asservissement PCSI / MPSI DS2 : Asservissement - Corrigéperso.numericable.fr/starnaud/DS DM...
12
Asservissement PCSI / MPSI - 1 - DS2 : Asservissement - Corrigé PROBLEME 1: ROBOT D’EXPLORATION DE LA PLANETE MARS (X-ENS PSI 2005) DIMENSIONNEMENT DU MOTEUR POUR VERIFIER LE CRITERE DE VITESSE DE TRANSLATION Pour que le robot se déplace à 0,5 m/s, la roue doit tourner à la vitesse angulaire de 2,5 rad/s. Le réducteur, situé entre le moteur et la roue, diminue la vitesse angulaire d'un facteur 180. Le rayon de la roue est de 200mm. Q1 : Sélectionner un moteur qui vous semble satisfaire le critère de vitesse de translation du robot, parmi les 3 proposés dans le tableau suivant : Moteur A B C Vitesse angulaire maxi (tr/min) 2000 4000 6000 Si la vitesse du robot est de 0.5 m/s, alors la vitesse angulaire de la roue est de 2.5 rad/s. Cette roue est entrainée par un moteur (de vitesse ) puis un réducteur (de vitesse ) de rapport . Ainsi la vitesse minimale du moteur doit etre A.N. : Ainsi seul le moteur C tourne suffisamment vite pour assurer le critère de performance en vitesse désiré. MODELISATION DU MOTEUR Q2 : A partir des 4 équations précédentes compléter le schéma-bloc du moteur sur le document réponse et préciser les grandeurs physiques. FS1 : permettre au robot de se déplacer par rapport au sol Fonction Critère Niveau FS1 Vitesse de translation du robot 0.5 m/s Erreur en régime permanent en vitesse 0 m/s (théorique) Erreur en régime permanent en position 0 mm (théorique)
Transcript of Asservissement PCSI / MPSI DS2 : Asservissement - Corrigéperso.numericable.fr/starnaud/DS DM...

Asservissement PCSI / MPSI
- 1 -
DS2 : Asservissement - Corrigé
PROBLEME 1: ROBOT D’EXPLORATION DE LA PLANETE MARS (X-ENS PSI 2005)
DIMENSIONNEMENT DU MOTEUR POUR VERIFIER LE CRITERE DE VITESSE DE TRANSLATION
Pour que le robot se déplace à 0,5 m/s, la roue doit tourner à la vitesse angulaire de 2,5 rad/s. Le réducteur, situé entre le moteur et la roue, diminue la vitesse angulaire d'un facteur 180. Le rayon de la roue est de 200mm.
Q1 : Sélectionner un moteur qui vous semble satisfaire le critère de vitesse de translation du
robot, parmi les 3 proposés dans le tableau suivant :
Moteur A B C
Vitesse angulaire maxi (tr/min)
2000 4000 6000
Si la vitesse du robot est de 0.5 m/s, alors la vitesse angulaire de la roue est de 2.5 rad/s. Cette roue est entrainée par un moteur (de vitesse ) puis un réducteur (de vitesse
) de rapport
.
Ainsi la vitesse minimale du moteur doit etre
A.N. :
Ainsi seul le moteur C tourne suffisamment vite pour assurer le critère de performance en vitesse désiré.
MODELISATION DU MOTEUR
Q2 : A partir des 4 équations précédentes compléter le schéma-bloc du moteur sur le document réponse et préciser les grandeurs physiques.
FS1 : permettre au robot de se déplacer par rapport au sol
Fonction Critère Niveau
FS1
Vitesse de translation du robot 0.5 m/s
Erreur en régime permanent en vitesse 0 m/s (théorique)
Erreur en régime permanent en position 0 mm (théorique)

Asservissement PCSI / MPSI
- 2 -
On se place dans les conditions de Heavy-side :
Q3 : Le schéma-bloc du moteur représente-t-il un système asservi ? Justifier votre réponse. Bien qu’il y ait une boucle de retour, il ne s’agit pas d’un système asservi. En effet, la boucle de retour ne traduit pas une mesure de la sortie pour adapter la consigne de la commande mais elle traduit le comportement électromécanique du moteur à courant continu.
Q4 : Tracer le schéma-bloc en poursuite.
En poursuite, on s’intéresse au suivi de la consigne par le système, i.e. on considère que les perturbations sont nulles. Donc , ainsi le schéma-bloc en poursuite a la forme suivante :
Q5 : Calculer la fonction de transfert
(forme canonique)
Par application de la formule de Black (formule du schéma-bloc), on obtient :
Q6 : Tracer le schéma bloc en régulation. En régulation, on s’intéresse à l’influence des perturbations sur le système. Pour cela, on considère que l’entrée est nulle. Donc , ainsi le schéma-bloc en poursuite a la forme suivante

Asservissement PCSI / MPSI
- 3 -
Il faut bien remarquer la transformation du signe de l’entrée du comparateur pour assurer la cohérence « mathématique » du schéma-bloc. Ainsi en réarrangeant la disposition des blocs nous obtenons le schéma suivant :
Q7 : Calculer la fonction de transfert
(forme canonique)
Dans ce cas, il est nécessaire de prendre en compte le changement de signe pour la formule de Black. Nous allons exploiter les relations du schéma-bloc pour déterminer cette fonction de transfert. L’objectif est d’établir une relation entre la grandeur d’entrée et la grandeur de sortie du schéma-bloc (et uniquement ces 2 grandeurs !!). En écrivant la sortie en fonction des blocs et de l’entrée nous obtenons :
Q8 : Justifier la relation suivante : . Sous l’hypothèse de SLCI, on peut appliquer le théorème de superposition pour déterminer la fonction de transfert totale du moteur. Ainsi on a bien :
On définit 2 constantes de temps : mécanique
et électrique
.

Asservissement PCSI / MPSI
- 4 -
Q9 : Montrer que, si , le dénominateur des fonctions et s’écrit sous la
forme : . Les deux constantes précédentes sont telles que . Simplifier alors les fonctions de transfert.
Les 2 fonctions de transfert ont pour dénominateur commun :
. Or si
, alors
donc le dénominateur devient :
soit
De plus si cela revient donc à négliger la constante de temps électrique devant la constante de temps mécanique. Ce qui est une hypothèse classique dans l’étude des asservissements. En effet d’un point de vue physique, les temps d’établissement du courant dans un circuit électrique s’effectuent de façon instantanée par rapport au démarrage mécanique des pièces mises en jeu dans un système. Ainsi la rapidité d’un système sera déterminée par la capacité de mise en mouvement de sa partie mécanique.
Pour la suite on considère que le couple résistant est nul. Cela revient donc à
considérer que la fonction de transfert du moteur s’écrit de la forme suivante :
Q10 : Dans ce cas déterminer les expressions littérales de K et T.
Par identification avec la question précédente, on trouve :
Q11 : Déterminer lorsqu’on soumet le moteur à un échelon de tension d’amplitude U0.
Exprimer le résultat en fonction de K, T et U0. Il s’agit d’un résultat classique du cours (réponse indicielle d’un système du 1er ordre). La démonstration s’effectue en réalisant une décomposition en éléments simples.
Q12 : Tracer et justifier les valeurs particulières suivantes de sans utiliser
l’expression de :
Valeur à l’origine
Valeur en régime permanent
Pente à l’origine La réponse temporelle d’un système du 1er ordre à un échelon a l’allure suivante (résultat classique du cours) : Pour déterminer les valeurs particulières il faut appliquer les théorèmes de la valeur initiale et finale à bon escient :
Valeur à l’origine, théorème de la val. init.

Asservissement PCSI / MPSI
- 5 -
Valeur à rég. Perm., théorème de la val. finale
Pente à l’origine, théorème de la val. init.
Pour la suite on prendra :
On choisit d’imposer un signal sinusoïdal d’entrée : , avec et
. Attention et ne représente pas la même grandeur physique !!
Q13 : Tracer sur le document-réponse le signal d’entrée avec ses caractéristiques.
Q14 : Même si l’analyse fréquentielle n’est pas au programme du DS, donner la définition du
gain en décibel et de la phase d’une fonction de transfert H(p). (question de cours !!).
Q15 : Sur le document-réponse, superposer au signal d’entrée la réponse du système, i.e. le
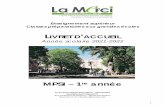
signal de sortie , en régime permanent. Préciser notamment son amplitude et son déphasage φ. (On rappelle que est le gain réel du système pour une pulsation donnée).
est le gain réel du système, ainsi on a
En effectuant l’application numérique pour , on obtient :
T = 0.31 s
+5V
-5V
Caractéristiques de la fonction , avec et
:
Amplitude = 5V = umax = -umin

Asservissement PCSI / MPSI
- 6 -
L’amplitude est Mesurable en régime permanent donc sur la 2ème ou 3ème sinusoïde mais surtout pas sur la 1ère !!
Graphiquement, on trouve un retard de 0.04s, i.e. un déphasage de
(cohérent avec le calcul effectué!!!)
PERFORMANCES DE L'ASSERVISSEMENT EN VITESSE
On désire asservir en vitesse la rotation du moteur. La solution retenue est d'utiliser une génératrice tachymétrique, de gain , qui délivre une tension proportionnelle à qui est
comparée à la consigne. L'amplificateur de puissance est A = 5 V/rad/s. La fonction de transfert du correcteur est notée C(p), et celle du moteur H(p).
Q16 : Exprimer la fonction de transfert en boucle fermée
du schéma bloc ci-
dessus en fonction de C(p), A, H(p) et Kg. Calculer la valeur numérique du gain du système asservi et de la constante de temps, si .
On peut appliquer la formule de Black :
Si on développe les calculs nous obtenons (Rappel :
):
si , on a alors :
+14.15 V
0.04 s

Asservissement PCSI / MPSI
- 7 -
est de la forme d’un 1er ordre :
Ainsi le gain statique du système vaut alors
(sans unité)
On prend tout d'abord .
Q17 : Par le calcul, déterminer l'erreur en régime permanent de la réponse en vitesse du système soumis à une consigne de type échelon d’amplitude . En déduire la précision du système.
L’erreur en régime permanent εS de la réponse en vitesse du système soumis à une consigne de type échelon d’amplitude est définie par la relation suivante :
On voit que est non nul, donc le système n’est pas assez précis !!
On prend ensuite
.
Q18 : Montrer que la fonction de transfert en boucle fermée peut s'écrire sous la forme :
. Exprimer numériquement K1, et en fonction de Kc.
On reprend le calcul précédent :
Ainsi on en déduit :
(sans unité)
(Ne pas oublier les constructions graphiques pour justifier les résultats !!)
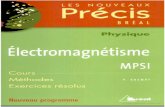
La réponse indicielle à un échelon unitaire est donnée sur le document réponse
Q19 : Identifier K1, et à partir de la réponse indicielle ci-dessus. En déduire KC. La courbe ci-dessous correspond à La réponse indicielle à un échelon unitaire, i.e. .

Asservissement PCSI / MPSI
- 8 -
Pour l’identification temporelle d’un système d’ordre 2 on rappelle les points suivants :
L’asymptote en régime permanent vaut avec Ainsi
Il est aussi possible de déterminer et à partir des abaques :
A l’aide de l’abaque des dépassements, on trouve bien qu’à un dépassement de 18% correspond un facteur d’amortissement de 0.5 (cohérent avec le calcul !!). A l’aide du second abaque (temps de réponse réduit), pour un amortissement de 0.5, on trouve un
temps de réponse réduit ( ) = 5.2
Les différences entre les valeurs calculées et des abaques proviennent des erreurs de lecture des valeurs numériques sur les différentes courbes.
Q20 : Expliquer en le justifiant par le calcul, si le système est devenu précis ou non, comme le demande le cahier des charges.
On reprend le même type de calcul qu’à la question 17 mais avec une fonction de transfert d’ordre
2 de la forme :
0.18
tpic
D1
tr5%

Asservissement PCSI / MPSI
- 9 -
L’erreur en régime permanent εS de la réponse en vitesse du système soumis à une consigne de type échelon d’amplitude est définie par la relation suivante :
Dans ce cas le système est précis en vitesse !!
PERFORMANCES DE L'ASSERVISSEMENT EN POSITION
Q21 : Déterminer la fonction de transfert associée au réducteur :
caractérise la fonction de transfert du réducteur de rapport 1/180 (« diminution de la vitesse d’un facteur 180 » défini au début de la question 1)
Q22 : Calculer la fonction de transfert de l’élément intégrateur
.
caractérise un intégrateur
. Pour le démontrer on part de la relation physique
qui existe entre la vitesse angulaire et la position angulaire puis on la traduite dans le domaine de Laplace (Conditions initiales nulles):
Q23 : Si on désirait asservir la position linéaire x(t) du robot, avec quelle fonction de transfert
doit-on compléter le schéma-bloc ? Pour cela déterminer la relation entre le déplacement angulaire de la roue et le déplacement linéaire du robot.
Il faudrait rajouter la fonction de transfert associée à la roue (de rayon R) qui relie l’angle de rotation de la roue au déplacement du robot par la relation :
On conserve
, , est à déterminer
Q24 : Calculer la fonction de transfert sous forme littérale :

Asservissement PCSI / MPSI
- 10 -
Le schéma-bloc en pointillés a pour fonction de transfert
(cf. Q18)
Ainsi cela revient à calculer la fonction de transfert du schéma-bloc suivant :
Q25 : Enoncer la condition fondamentale de stabilité d’un SLCI
Un SLCI est stable sssi tous les pôles de la fonction de transfert sont à partie réelles strictement négatives.
2 fonctions de transfert sont possibles pour le correcteur :
Q26 : Justifier la forme de la fonction de transfert du correcteur pour respecter le critère de performance en position et la stabilité du système.
Pour cela on peut regarder si la réponse en régime permanent converge ou non vers une valeur finie.
Cas 1 :
Cas 1 :

Asservissement PCSI / MPSI
- 11 -
PROBLEME 2: PRESENTATION DU SYSTEME D'ETUDE: QUILLE PENDULAIRE
(MP PSI Mines 14)
Q1 Donner les expressions des fonctions de transfert A1, A2, A3 et A4 en fonction de la variable complexe p et des constantes.
)(2
)()(
pBS
VpX
Sp
pQ
)()(.)(2 pFpSpXkpMpR
SppA
1)(
1
V
BSpA
2)(
2 SpA )(
3
kpMppA
24
1)(
Q2 Le schéma-bloc peut se mettre sous la forme suivante, donner les expressions des fonctions de transfert H1 et H2 en fonction de A1, A2, A3 et A4, puis de la variable p et des constantes.
Q(p)
A2A3
A4
FR(p)
X(p)+
-321 AAA +
-
Vp
BSpApApApH
2)().().()( 3211
2222432
42
22
1
)().().(1
)()(
MVpVpBSkV
V
V
BSkpMp
pApApA
pApH
Q3 Pour ce vérin non perturbé (FR=0), donner sa fonction de transfert X(p)/Q(p) en fonction de la variable p et des constantes.
)2(
2.
)(
)(2221
MVpVpBSkVp
BSHH
pQ
pX
Q4 Donner les performances de ces 2 réponses et conclure vis-à-vis des exigences du cahier des charges.

Asservissement PCSI / MPSI
- 12 -
1)( pC Stable, précis, oscillations et dépassements %20% D , rapidité : .
Ne respecte pas le cahier des charges (dépassement et pas assez rapide).
44,0)( pC Stable, précis, pas oscillations et pas de dépassements, rapidité : st 3%5
Respecte le cahier des charges.