
MPSI/PCSI Sciences de l ... - perso.numericable.frperso.numericable.fr/starnaud/Asservissement/TP...
9
MPSI/PCSI Sciences de l’Ingénieur 1/9 TP de SI, asservissement : Segway. (Centrale Supelec PSI 05) Mise en situation. Le support de l’étude est le véhicule auto balancé Segway. Il s’agit d’un moyen de transport motorisé qui permet de se déplacer en ville. En termes de prestations, il est moins rapide qu’une voiture ou qu’un scooter, plus maniable, plus écologique, moins encombrant et nettement plus moderne. La conduite du Segway se fait alors par inclinaison du corps vers l’avant ou vers l’arrière, afin d’accélérer ou freiner le mouvement (comme pour la marche à pied dans laquelle le piéton s’incline vers l’avant pour débuter le mouvement). Les virages à droite et à gauche sont quant à eux commandés par la rotation de la poignée directionnelle située sur la droite du guidon. La spécificité de ce véhicule est d’avoir deux roues qui ont le même axe de rotation, avec son centre de gravité situé au dessus de l’axe commun des roues, si bien qu’on se demande comment rester à l’équilibre une fois monté sur la plate-forme. Tout comme le cerveau permet à l’homme de tenir debout sans tomber grâce à l’oreille interne, le système comporte un dispositif d’asservissement d’inclinaison, maintenant la plate forme du véhicule à l’horizontale ou encore la barre d’appui, supposée orthogonale à cette plate forme, à la verticale. Le Segway comporte à cet effet des capteurs et des microprocesseurs transmettant des consignes aux deux moteurs électriques équipant les deux roues.
Transcript of MPSI/PCSI Sciences de l ... - perso.numericable.frperso.numericable.fr/starnaud/Asservissement/TP...

MPSI/PCSI Sciences de l’Ingénieur
1/9
TP de SI, asservissement : Segway. (Centrale Supelec PSI 05) Mise en situation. Le support de l’étude est le véhicule auto balancé Segway. Il s’agit d’un moyen de transport motorisé qui permet de se déplacer en ville. En termes de prestations, il est moins rapide qu’une voiture ou qu’un scooter, plus maniable, plus écologique, moins encombrant et nettement plus moderne. La conduite du Segway se fait alors par inclinaison du corps vers l’avant ou vers l’arrière, afin d’accélérer ou freiner le mouvement (comme pour la marche à pied dans laquelle le piéton s’incline vers l’avant pour débuter le mouvement). Les virages à droite et à gauche sont quant à eux commandés par la rotation de la poignée directionnelle située sur la droite du guidon.
La spécificité de ce véhicule est d’avoir deux roues qui ont le même axe de rotation, avec son centre de gravité situé au dessus de l’axe commun des roues, si bien qu’on se demande comment rester à l’équilibre une fois monté sur la plate-forme. Tout comme le cerveau permet à l’homme de tenir debout sans tomber grâce à l’oreille interne, le système comporte un dispositif d’asservissement d’inclinaison, maintenant la plate forme du véhicule à l’horizontale ou encore la barre d’appui, supposée orthogonale à cette plate forme, à la verticale. Le Segway comporte à cet effet des capteurs et des microprocesseurs transmettant des consignes aux deux moteurs électriques équipant les deux roues.
MPSI/PCSI Sciences de l’Ingénieur
2/9
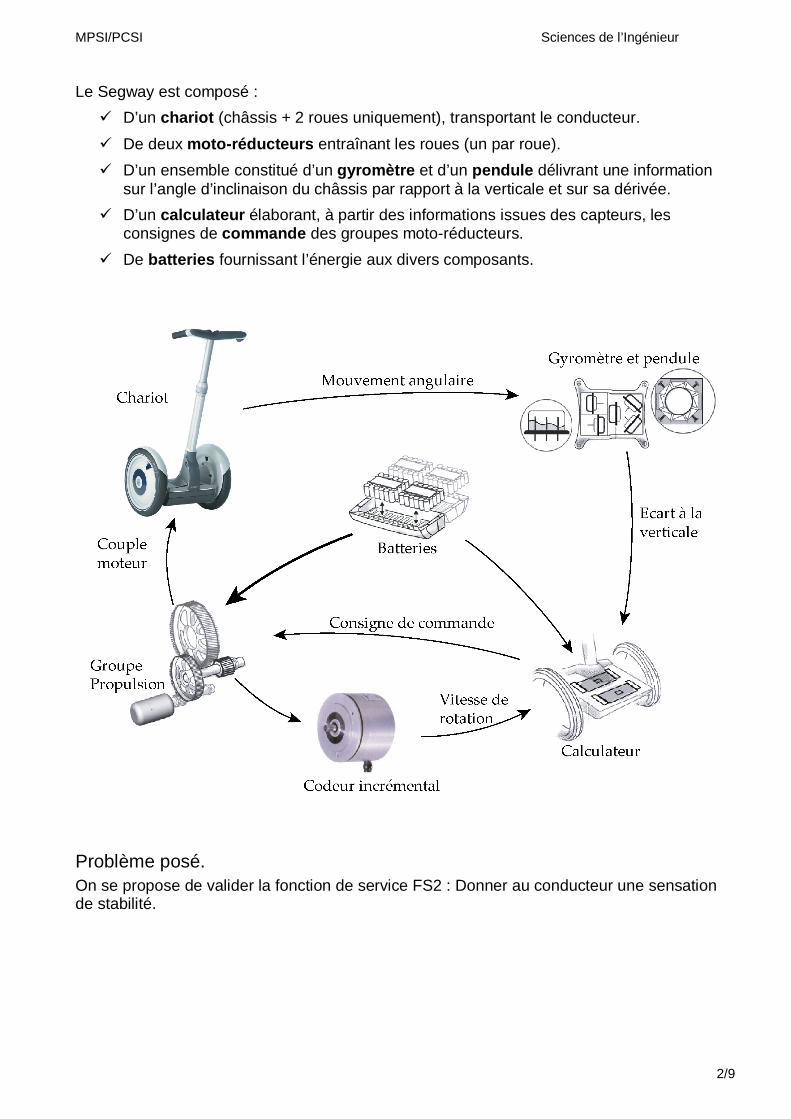
Le Segway est composé : D’un chariot (châssis + 2 roues uniquement), transportant le conducteur. De deux moto-réducteurs entraînant les roues (un par roue). D’un ensemble constitué d’un gyromètre et d’un pendule délivrant une information
sur l’angle d’inclinaison du châssis par rapport à la verticale et sur sa dérivée. D’un calculateur élaborant, à partir des informations issues des capteurs, les
consignes de commande des groupes moto-réducteurs. De batteries fournissant l’énergie aux divers composants.
Problème posé. On se propose de valider la fonction de service FS2 : Donner au conducteur une sensation de stabilité.
MPSI/PCSI Sciences de l’Ingénieur
3/9
.
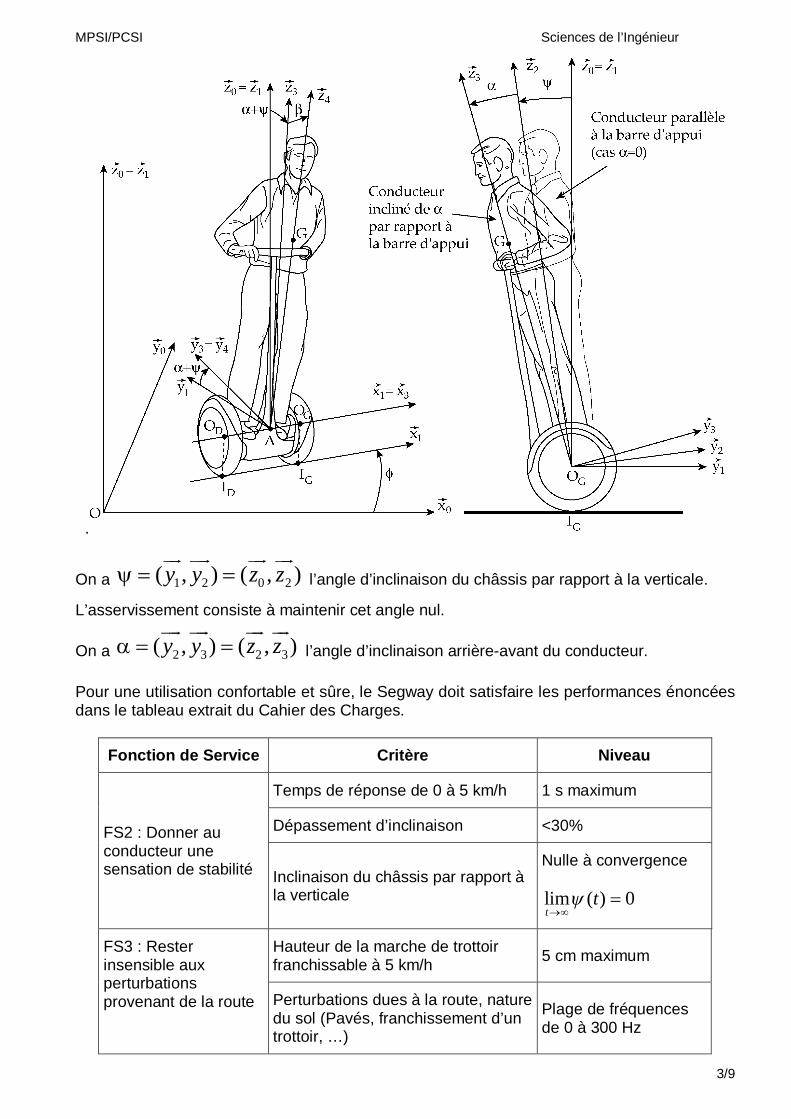
On a 1 2 0 2( , ) ( , )y y z z
l’angle d’inclinaison du châssis par rapport à la verticale.
L’asservissement consiste à maintenir cet angle nul.
On a 2 3 2 3( , ) ( , )y y z z
l’angle d’inclinaison arrière-avant du conducteur. Pour une utilisation confortable et sûre, le Segway doit satisfaire les performances énoncées dans le tableau extrait du Cahier des Charges.
Fonction de Service Critère Niveau
FS2 : Donner au conducteur une sensation de stabilité
Temps de réponse de 0 à 5 km/h 1 s maximum
Dépassement d’inclinaison <30%
Inclinaison du châssis par rapport à la verticale
Nulle à convergence
lim ( ) 0t
t
FS3 : Rester insensible aux perturbations provenant de la route
Hauteur de la marche de trottoir franchissable à 5 km/h 5 cm maximum
Perturbations dues à la route, nature du sol (Pavés, franchissement d’un trottoir, …)
Plage de fréquences de 0 à 300 Hz
MPSI/PCSI Sciences de l’Ingénieur
4/9
Régulation d’inclinaison du Segway
La régulation d’inclinaison du Segway est réalisée par :
Un moto-réducteur qui permet de délivrer un couple )(.)( tuKtC mm
Avec )(tu la tension de commande et 124 . .mK N mV .
Le système mécanique dont les équations sont :
)(.)(.)(. tctCbta m )()()( ttt
Avec 22.5626 mkga kgb 875
222 ..93750 smkgc
)(t : angle d’inclinaison du conducteur par rapport au Segway.
)(t : angle d’inclinaison du Segway par rapport à la verticale.
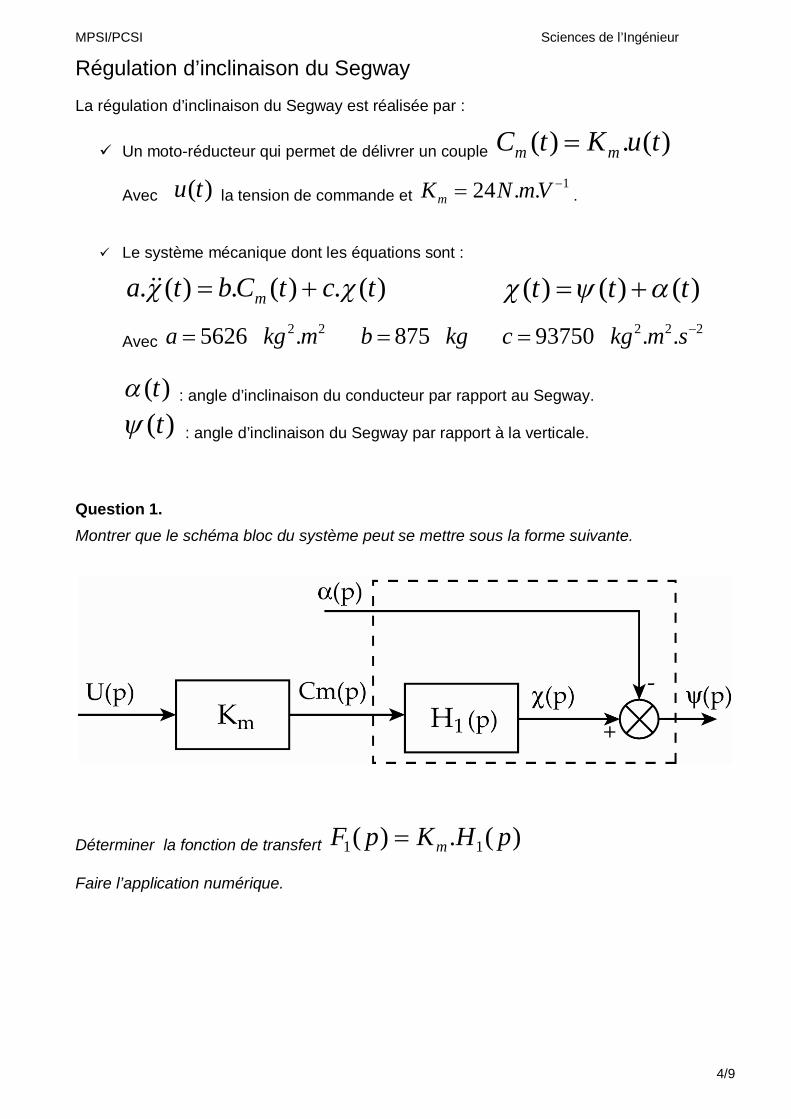
Question 1. Montrer que le schéma bloc du système peut se mettre sous la forme suivante.
Déterminer la fonction de transfert )(.)( 11 pHKpF m Faire l’application numérique.
MPSI/PCSI Sciences de l’Ingénieur
5/9
Simulation du fonctionnement avec le logiciel « scilab xcos ».
Lancer le logiciel Scilab.
Lancer l'application Xcos en cliquant sur . Vous disposez alors d'un éditeur graphique et d'un navigateur de palettes
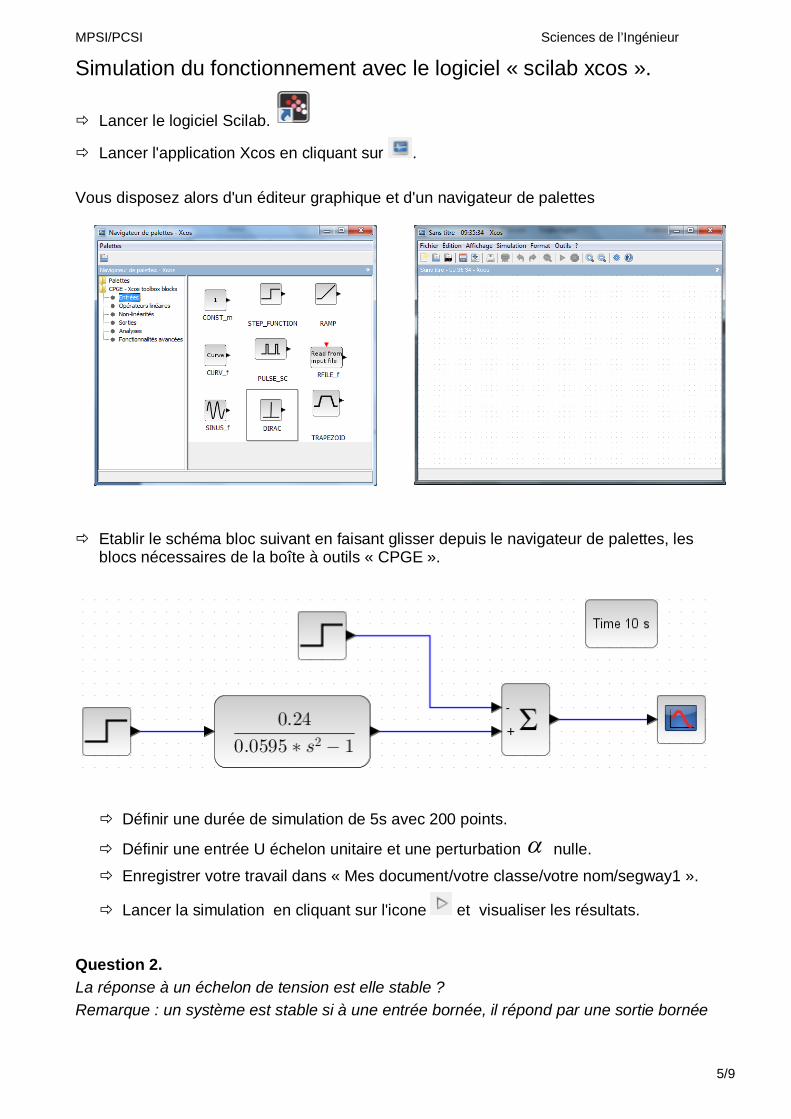
Etablir le schéma bloc suivant en faisant glisser depuis le navigateur de palettes, les
blocs nécessaires de la boîte à outils « CPGE ».
Définir une durée de simulation de 5s avec 200 points.
Définir une entrée U échelon unitaire et une perturbation nulle.
Enregistrer votre travail dans « Mes document/votre classe/votre nom/segway1 ».
Lancer la simulation en cliquant sur l'icone et visualiser les résultats. Question 2. La réponse à un échelon de tension est elle stable ? Remarque : un système est stable si à une entrée bornée, il répond par une sortie bornée
MPSI/PCSI Sciences de l’Ingénieur
6/9
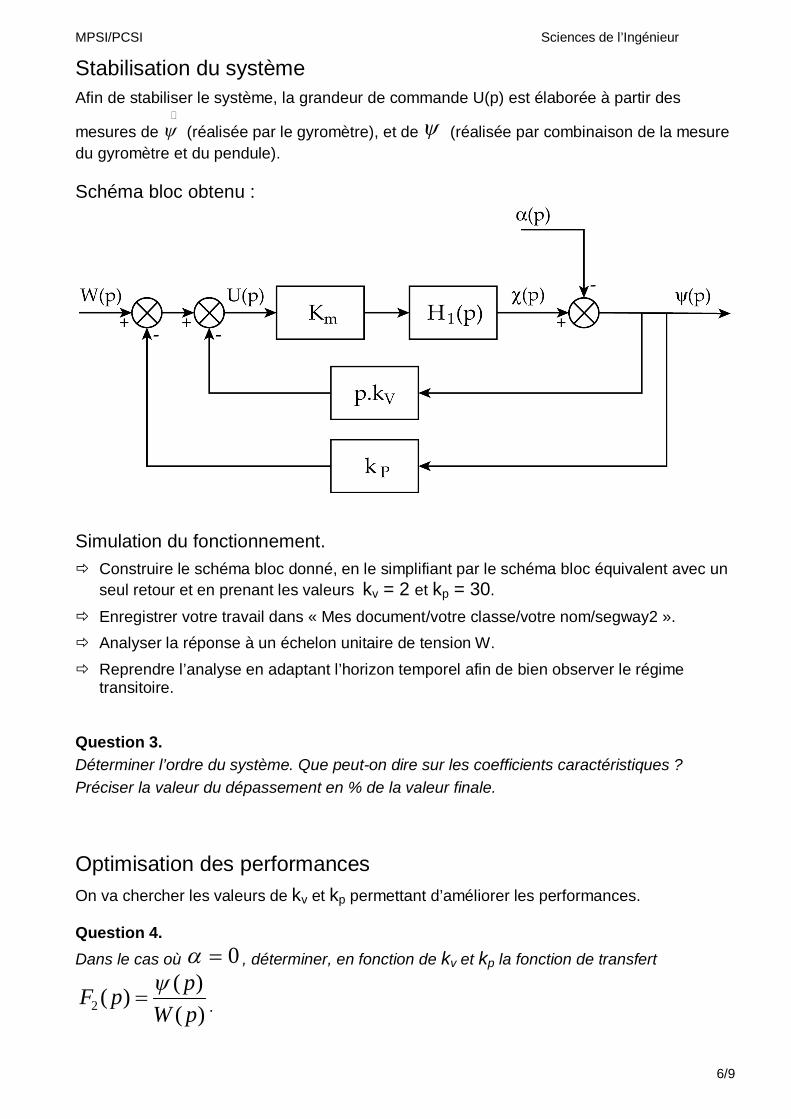
Stabilisation du système Afin de stabiliser le système, la grandeur de commande U(p) est élaborée à partir des
mesures de (réalisée par le gyromètre), et de (réalisée par combinaison de la mesure du gyromètre et du pendule). Schéma bloc obtenu :
Simulation du fonctionnement. Construire le schéma bloc donné, en le simplifiant par le schéma bloc équivalent avec un
seul retour et en prenant les valeurs kv = 2 et kp = 30.
Enregistrer votre travail dans « Mes document/votre classe/votre nom/segway2 ». Analyser la réponse à un échelon unitaire de tension W. Reprendre l’analyse en adaptant l’horizon temporel afin de bien observer le régime
transitoire. Question 3. Déterminer l’ordre du système. Que peut-on dire sur les coefficients caractéristiques ? Préciser la valeur du dépassement en % de la valeur finale. Optimisation des performances On va chercher les valeurs de kv et kp permettant d’améliorer les performances. Question 4. Dans le cas où 0 , déterminer, en fonction de kv et kp la fonction de transfert
2( )( )( )pF p
W p
.
MPSI/PCSI Sciences de l’Ingénieur
7/9
La mettre sous la forme1..2
)(2
22
2
pzpKpF
nn
.
Déterminer ses paramètres caractéristiques. On choisit une pulsation propre proche de celle du système mécanique, c’est à dire
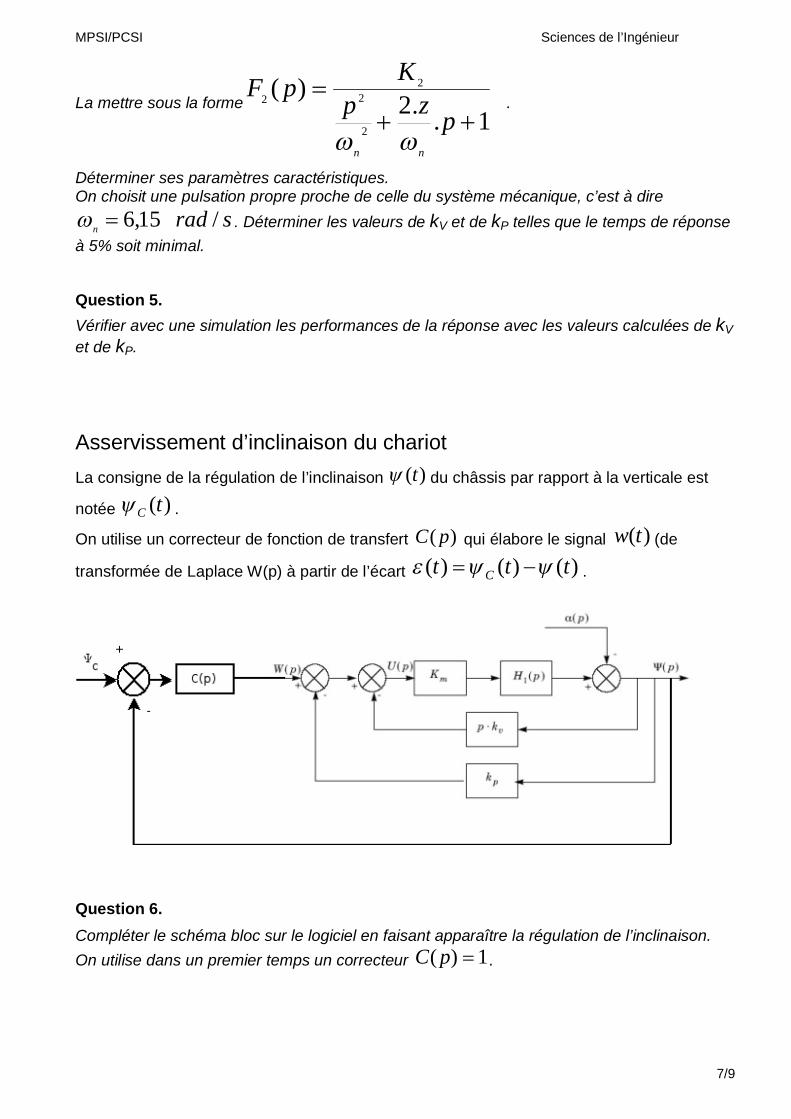
sradn /15,6 . Déterminer les valeurs de kV et de kP telles que le temps de réponse à 5% soit minimal. Question 5. Vérifier avec une simulation les performances de la réponse avec les valeurs calculées de kV et de kP. Asservissement d’inclinaison du chariot La consigne de la régulation de l’inclinaison ( )t du châssis par rapport à la verticale est
notée ( )C t .
On utilise un correcteur de fonction de transfert ( )C p qui élabore le signal ( )w t (de
transformée de Laplace W(p) à partir de l’écart ( ) ( ) ( )Ct t t .
Question 6. Compléter le schéma bloc sur le logiciel en faisant apparaître la régulation de l’inclinaison. On utilise dans un premier temps un correcteur 1)( pC .
MPSI/PCSI Sciences de l’Ingénieur
8/9
La régulation d’inclinaison du Segway consiste à maintenir la consigne ( )C t nulle.
Cette régulation est réalisée, si quelle que soit l’inclinaison ( )t du conducteur, la sortie
( )t converge vers ( )C t , valeur que l’on considère dans ce cas nulle.
Le conducteur agit directement sur la valeur de ( )t pour accélérer ou décélérer.
Pour le système Segway, conducteur exclu, le paramètre ( )t peut être considéré comme une perturbation. Utilisation d’un correcteur proportionnel Question 7.
Déterminer avec le logiciel la réponse ( )t du châssis à une perturbation ( )t de type
échelon unitaire avec un correcteur 1)( pC . Le cahier des charges est-il satisfait ?
Fonction de Service Critère Niveau
FS2 : Donner au conducteur une sensation de stabilité
Temps de réponse de 0 à 5 km/h 1 s maximum
Dépassement d’inclinaison <30%
Inclinaison du châssis par rapport à la verticale
Nulle à convergence
lim ( ) 0t
t
Démarche pour faire varier les valeurs du correcteur : Définir un paramètre formel « c » en cliquant droit sur la zone graphique puis « Modifier
le contexte », taper alors c = 1 puis « OK ». Modifier bloc du correcteur en lui donnant le valeur c. Pour spécifier plusieurs valeurs à ce paramètre, faire glisser le bloc « Variation de
paramètres » définir les valeurs de « a » suivantes : 30, 100, … (séparées par des virgules).
Question 8.
Déterminer avec le logiciel la réponse ( )t du châssis à une perturbation ( )t de type
échelon unitaire avec un correcteur cpC )( .
Essayer les valeurs de correction c = 1 ; 30 ; 60 ; 100 ; 150… , en déduire l’influence de Kc.
MPSI/PCSI Sciences de l’Ingénieur
9/9
Utilisation d’un correcteur proportionnel intégral
Un correcteur proportionnel intégral 1( ) 1ii
C p KT p
est envisagé
Question 9.
Déterminer avec une simulation la réponse ( )t du châssis à une perturbation ( )t de
type échelon unitaire avec un correcteur 1( ) 1ii
C p KT p
.
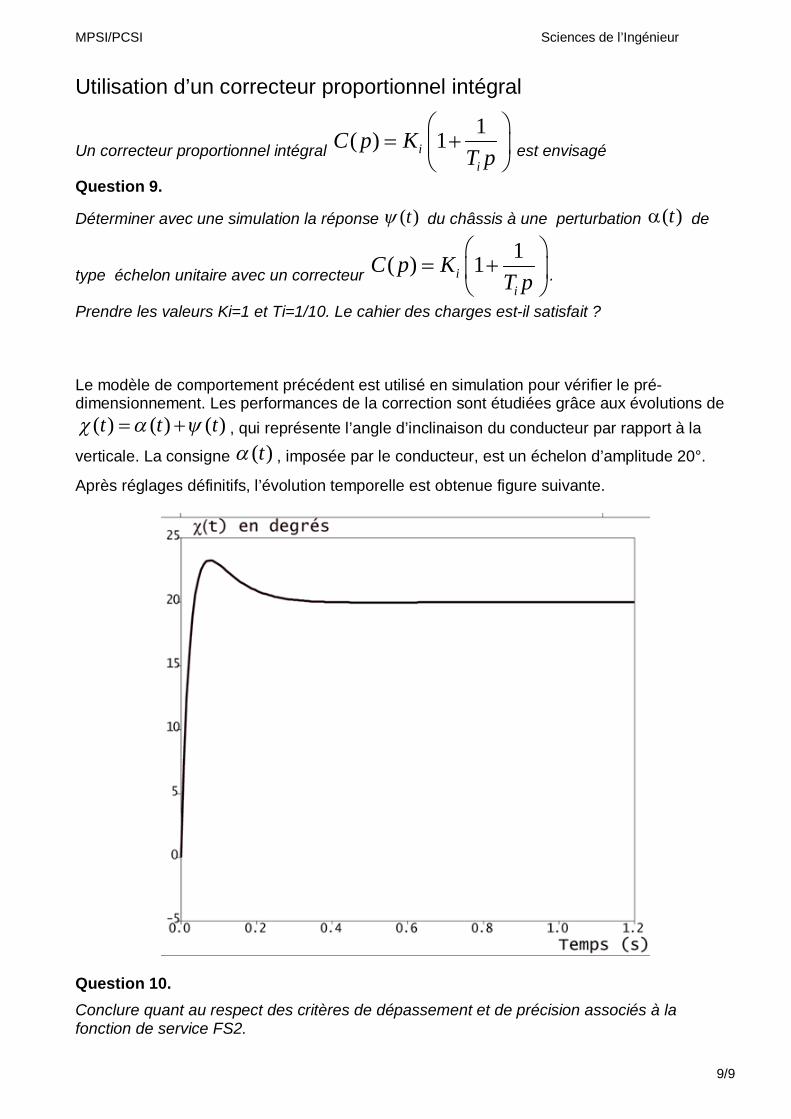
Prendre les valeurs Ki=1 et Ti=1/10. Le cahier des charges est-il satisfait ? Le modèle de comportement précédent est utilisé en simulation pour vérifier le pré-dimensionnement. Les performances de la correction sont étudiées grâce aux évolutions de
( ) ( ) ( )t t t , qui représente l’angle d’inclinaison du conducteur par rapport à la
verticale. La consigne ( )t , imposée par le conducteur, est un échelon d’amplitude 20°.
Après réglages définitifs, l’évolution temporelle est obtenue figure suivante.
Question 10. Conclure quant au respect des critères de dépassement et de précision associés à la fonction de service FS2.


















