Asservissement PCSI/MPSI DS Asservissement...
10
Asservissement PCSI/MPSI - 1 - DS Asservissement novembre 2014 Durée 2h Aucun Document autorisé Calculatrice autorisée Corrigé sur le site : http://perso.numericable.fr/starnaud/ Questions de cours 1. Tracer (sans calcul) la réponse à un échelon unitaire d’un système du deuxième ordre avec un gain statique K=2 et un coefficient d’amortissement z=0,7. 2. Tracer (sans calcul) le diagramme de Bode d’un système du premier ordre. 3. Tracer en le justifiant par des calculs le diagramme de Bode d’un intégrateur. Exercice 1 Soit le système asservi à retour unitaire : On a ) . 3 1 .( 2 ) ( p p p H Questions 1. Exprimer l’écart ) ( ) ( ) ( p S p E p en fonction de ) ( p E et de ) ( p H . 2. Déterminer l’erreur statique (entrée échelon unitaire) 3. Déterminer l’erreur de traînage (entrée rampe de pente 1)
-
Upload
truongliem -
Category
Documents
-
view
275 -
download
2
Transcript of Asservissement PCSI/MPSI DS Asservissement...

Asservissement PCSI/MPSI
- 1 -
DS Asservissement novembre 2014
Durée 2h Aucun Document autorisé
Calculatrice autorisée
Corrigé sur le site : http://perso.numericable.fr/starnaud/
Questions de cours
1. Tracer (sans calcul) la réponse à un échelon unitaire d’un système du deuxième ordre avec un gain statique K=2 et un coefficient d’amortissement z=0,7.
2. Tracer (sans calcul) le diagramme de Bode d’un système du premier ordre.
3. Tracer en le justifiant par des calculs le diagramme de Bode d’un intégrateur.
Exercice 1 Soit le système asservi à retour unitaire :
On a ).31.(2)(
pppH
Questions
1. Exprimer l’écart )()()( pSpEp en fonction de )( pE et de
)( pH .
2. Déterminer l’erreur statique (entrée échelon unitaire)
3. Déterminer l’erreur de traînage (entrée rampe de pente 1)

Asservissement PCSI/MPSI
- 2 -
Exercice 2 Tracer le diagramme de Bode de la fonction de transfert :
).2,01.().101.(5)(
ppppH
PRESENTATION DU SYSTEME D'ETUDE: ROBOT D’EXPLORATION DE LA PLANETE MARS
(Système extrait du concours X-ENS PSI 2005) Dans le cadre de l'exploration du système planétaire, le CNES (Centre
National d'Etudes Spatiales) a développé un prototype de robot. L'étude proposée ici concerne la régulation de vitesse d’une des roues
motrices de ce robot. Chaque roue motrice est mise en rotation par un moteur, dont la vitesse de rotation est réduite par l'intermédiaire d'un réducteur à engrenages. Le moteur et le réducteur sont insérés dans la roue.
Le cahier des charges fonctionnel partiel de l'ensemble {moteur + réducteur + roue} lors d'un déplacement du robot, est fourni ci-après :
FS1 : permettre au robot de se déplacer par rapport au sol
Fonction Critère Niveau
FS1
Vitesse de translation du robot 0.5 m/s
Erreur en régime permanent en vitesse 0 m/s (théorique)
Erreur en régime permanent en position 0 mm (théorique)

Asservissement PCSI/MPSI
- 3 -
DIMENSIONNEMENT DU MOTEUR POUR VERIFIER LE CRITERE DE VITESSE DE TRANSLATION
Pour que le robot se déplace à 0,5 m/s, la roue doit tourner à la vitesse angulaire de 2,5 rad/s. Le réducteur, situé entre le moteur et la roue, diminue la vitesse angulaire d'un facteur 180. Le rayon de la roue est de 200mm.
Q1 : Sélectionner un moteur qui vous semble satisfaire le critère de vitesse
de translation du robot, parmi les 3 proposés dans le tableau suivant :
Moteur A B C Vitesse angulaire
maxi (tr/min) 2000 4000 6000
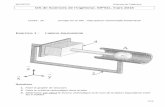
MODELISATION DU MOTEUR
L’actionneur utilisé pour entraîner une roue est un moteur à courant continu.
Son alimentation en énergie électrique se fait par l’induit comme le montre la figure ci-contre.
D’un point de vue électrique, l’induit peut être matérialisé par une résistance R
en série avec une inductance L et une force contre-électromotrice e(t). D’un point de vue mécanique, l’axe est soumis à un couple moteur Cm(t), un
couple résistant Cr(t), et un couple de frottement visqueux de facteur f. On note J l’inertie de l’axe du moteur.
Le couplage électromécanique du moteur est modélisé par son coefficient constant k, on a les deux équations suivantes :
(1) (2)
L’application de la loi des mailles à l’induit et du principe fondamental de la dynamique à l’axe du moteur donne les deux équations suivantes :
Equation électrique : (3)
Equation mécanique : (4)
On note la vitesse de rotation du moteur et i(t) son intensité.
Q2 : A partir des 4 équations précédentes compléter le schéma-bloc du moteur sur le document réponse et préciser les grandeurs physiques.

Asservissement PCSI/MPSI
- 4 -
Q3 : Le schéma-bloc du moteur représente-t-il un système asservi ? Justifier votre réponse.
Q4 : Tracer le schéma-bloc en poursuite (perturbations nulles) .
Q5 : Calculer la fonction de transfert pour (la mettre sous forme canonique)
Q6 : Tracer le schéma bloc en régulation (entrée nulle).
Q7 : Calculer la fonction de transfert pour (la mettre sous forme canonique)
Q8 : Justifier la relation suivante : .
On définit classiquement deux constantes de temps : la constante de temps
mécanique et la constante de temps électrique .
Q9 : Montrer que, si , le dénominateur des fonctions et s’écrit sous la forme : . Les deux constantes précédentes sont telles que . Simplifier alors les fonctions de transfert.
Pour la suite on considère que le couple résistant est nul. Cela
revient donc à considérer que la fonction de transfert du moteur s’écrit de la forme suivante :
Q10 : Dans ce cas déterminer les expressions littérales de K et T.
On soumet le moteur à un échelon de tension d'amplitude U0.
Q11 : Tracer et déterminer les valeurs particulières suivantes de sans utiliser l’expression de :
Valeur à l’origine Valeur en régime permanent Pente à l’origine
Pour la suite on prendra :
On choisit d’imposer un signal sinusoïdal d’entrée : , avec et . Attention et ne représente pas la même grandeur physique !!
Q12 : Tracer sur le document-réponse le signal d’entrée avec ses
caractéristiques. Q13 : Donner la définition du gain en décibel et de la phase d’une fonction
de transfert H(p). (question de cours !!).

Asservissement PCSI/MPSI
- 5 -
Q14 : Sur le document-réponse, superposer au signal d’entrée la réponse du système, c'est à dire le signal de sortie , en régime permanent. Préciser notamment son amplitude et son déphasage ö. (On rappelle que
est le gain réel du système pour une pulsation donnée). Q15 : Sur le document réponse tracer les diagrammes de Bode
asymptotique de la fonction de transfert H(p). Tracer ensuite l'allure des courbes réelles.
PERFORMANCES DE L'ASSERVISSEMENT EN VITESSE
On désire asservir en vitesse la rotation du moteur. La solution retenue est d'utiliser une génératrice tachymétrique, de gain , qui délivre une tension proportionnelle à qui est comparée à la consigne. L'amplificateur de puissance est A = 5 V/rad/s. La fonction de transfert du correcteur est notée C(p), et celle du moteur H(p).
Q16 : Exprimer la fonction de transfert en boucle fermée du schéma bloc ci-dessus en fonction de C(p), A, H(p) et Kg. La mettre sous la
forme . Calculer la valeur numérique du gain du système asservi et de la constante de temps, si .
On prend tout d'abord .
Q17 : Déterminer la précision du système ainsi que son temps de réponse à 5%.
On prend ensuite .
Q18 : Montrer que la fonction de transfert en boucle fermée peut alors
s'écrire sous la forme : . Exprimer numériquement K1, et en fonction de Kc.
(Ne pas oublier les constructions graphiques pour justifier les résultats) La réponse indicielle à un échelon unitaire est donnée sur le document réponse
Q19 : Identifier K1, et à partir de la réponse indicielle du (voir doc.
réponse). En déduire KC.

Asservissement PCSI/MPSI
- 6 -
Q20 : Déterminer la précision du système ainsi que son temps de réponse
à 5%.
PERFORMANCES DE L'ASSERVISSEMENT EN POSITION
L’asservissement complet (en vitesse et position angulaire) de la roue est représenté par le schéma-bloc ci-dessous :
Q21 : Déterminer la fonction de transfert associée au réducteur :
On précise que est la vitesse angulaire de la roue et la position angulaire de la roue.
Q22 : Calculer la fonction de transfert de l’élément intégrateur
. Q23 : Si on désirait asservir la position linéaire x(t) du robot, avec quelle
fonction de transfert doit-on compléter le schéma-bloc ? Pour cela déterminer la relation entre le déplacement angulaire de la roue et le déplacement linéaire du robot.
On conserve , , est à déterminer Q24 : Calculer la fonction de transfert sous forme littérale:
Q25 : Enoncer la condition fondamentale de stabilité d’un SLCI
2 fonctions de transfert sont possibles pour le correcteur :
Q26 : Justifier la forme de la fonction de transfert du correcteur pour
respecter le critère de performance en position et la stabilité du système.

Asservissement PCSI/MPSI
- 7 -
NOM, Prénom :
DOCUMENT REPONSE Q2 :
Q12 – Q14 :
U(p) Ωm
(p)
Cr(p)
+ -
+ -

Asservissement PCSI/MPSI
- 8 -
NOM, Prénom :
DOCUMENT REPONSE Q15:

Asservissement PCSI/MPSI
- 9 -
NOM, Prénom :
DOCUMENT REPONSE Q18 :

Asservissement PCSI/MPSI
- 10 -
NOM, Prénom :
DOCUMENT REPONSE
2z1
z
max es
ssD
pic2
0
a t.2z1
2T
Premier dépassement relatif
Pseudo-période des oscillations
Rappels de formules sur la réponse indicielle du deuxième ordre fondamental