
Traitement du signal -...
106
1 0 20 40 60 80 100 120 140 -0.13 -0.09 -0.05 -0.01 0.03 0.07 0.11 0.15 0.19 Partie voisØe du mot six (au milieu du mot) 0 20 40 60 80 100 120 140 -0.03 -0.02 -0.01 0.00 0.01 0.02 Partie non-voisØe du mot six (aux 3/4 du mot) Cours - Travaux DirigØs et Travaux Pratiques de Traitement du signal Benot Decoux [email protected]
Transcript of Traitement du signal -...

1
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Cours - Travaux Dirigés etTravaux Pratiques de
Traitement du signal
Benoît [email protected]
2
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
I) Introduction générale
Plan du cours
Cours � TD
Grandes parties :
Généralités sur les signauxAnalyse fréquentielle des signaux (Séries de Fourier, Transformée de Fourier�)Filtrage analogique et numérique(Transformée de Laplace�)
Dans chaque partie :
Approfondissements théoriques (T. Laplace, distributions, intégration�)Cas continu, cas discretCas des imagesApplicationsExercices
TP
Utilisation de Scilab
3
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
I) Introduction générale
Modalités de déroulementChaque séance : 1h-1h30 cours / 1h30-2h TPApproche pédagogique : très appliquée voire inductiveLogiciel/langage de programmation utilisé : ScilabTP par binôme, sur ordinateurs portables personnelsCompte-rendus de TP (1 par séance) :
Contenu :o réponses aux questions poséeso programmes écritso résultats de leur testo interprétation de ces résultats
Format fichiers : compatible MsWordNom fichier : TPn_Nom1Nom2.doc (n numéro du TP)Possibilité de compléter avant séance suivante ; envoi des compléments à :
EvaluationQCM de 5 à 10 questions en fin de chaque séance (10 mn) ; questions de cours, TD et TPCompte-rendus de TPExamen final

4
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
I) Introduction générale
Quelques généralités
Qu�est-ce qu�un signal ?
! une grandeur physique variant au cours du temps! une fonction mathématique (variable : le temps)
mais également�
! une image (variables : les 2 dimensions spatiales)
Qu�est-ce que le traitement du signal ?
! A la fois très théorique et très appliqué
Applications
! téléphonie, communications, audio-visuel, médecine�
Outils! ordinateur / logiciels-programmation "bas-niveau"! processeurs spécialisés (DSP)
5
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
II) Notions générales
II.1) Rappels
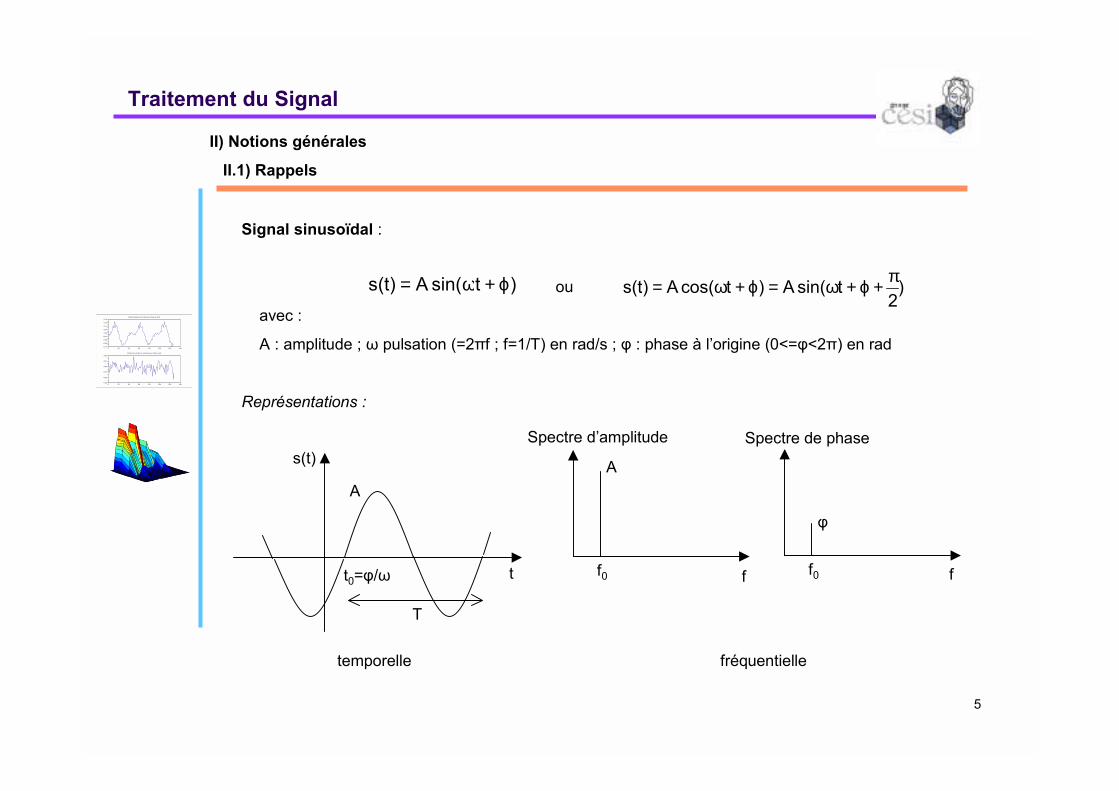
Signal sinusoïdal :
ou
avec :
A : amplitude ; ω pulsation (=2πf ; f=1/T) en rad/s ; φ : phase à l�origine (0<=φ<2π) en rad
Représentations :
temporelle fréquentielle
)tsin(A)t(s ϕ+ω=
f0
Spectre d�amplitude
A
f f0
Spectre de phase
φ
f
T
A
t
s(t)
t0=φ/ω
)2
tsin(A)tcos(A)t(s π+ϕ+ω=ϕ+ω=

6
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
II) Notions générales
II.1) Rappels
Signal quelconque :
Représentations (exemple : mot "zéro") :
temporelle :
fréquentielle :
Spectre d�amplitude
7
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
II) Notions générales
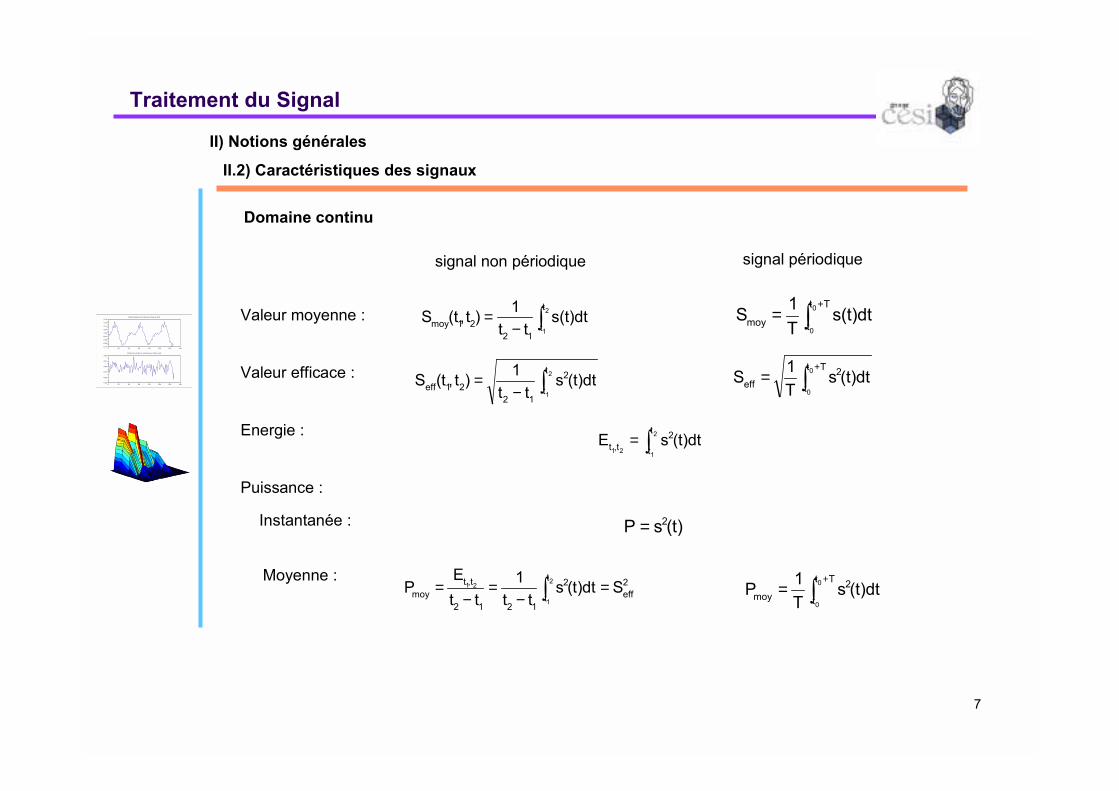
II.2) Caractéristiques des signaux
Valeur moyenne :
Valeur efficace :
Energie :
Puissance :
Instantanée :
Moyenne :
∫+
=Tt
tmoy0
0
dt)t(sT1S
∫+
=Tt
t
2eff
0
0
dt)t(sT1S
∫+
=Tt
t
2moy
0
0
dt)t(sT1P
)t(sP 2=
∫−= 2
1
t
t12
21moy dt)t(stt
1)t,t(S
signal périodiquesignal non périodique
2eff
t
t
2
1212
t,tmoy Sdt)t(s
tt1
ttE
P 2
1
21 =−
=−
= ∫
∫=2
121
t
t
2t,t dt)t(sE
∫−= 2
1
t
t
2
1221eff dt)t(s
tt1)t,t(S
Domaine continu

8
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
II) Notions générales
II.2) Caractéristiques des signaux
Valeur moyenne :
Energie :
Puissance :
Instantanée : , n indice d�échantillon
Moyenne :
Domaine discret
Soit s={s1, s2, �sN} un signal discret composé de N échantillons. Par analogie avec le domaine continu, on peut définir les notions de valeur moyenne, d�énergie et de puissance (la somme continuese transforme en somme discrète ):
∑−
=
=1N
0nnmoy s
N1S
∑−
=
=1N
0n
2nsE
∫∑
2nn sP =
∑∑−
=
−
=
===1N
0nn
1N
0n
2n P
N1s
N1
NEP

9
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
Principe
Tout signal s(t) périodique peut se décomposer sous la forme d�une somme de fonctions sinusoïdales (sinus-cosinus) dont les fréquences sont des multiples entiers n de sa fréquence, et et les amplitudes diminuent lorsque n augmente :
Avec , T période du signal et f0 sa fréquencea0 est la valeur moyenne du signal :
Les termes de la somme sont appelés harmoniques (partiels en musique) :
(n≥1)
Propriétés importantes
� Si la fonction s(t) est paire, bn=0 pour tout n>0.� Si la fonction s(t) est impaire, an=0 pour tout n≥0.
III) Séries de Fourier
III.1) Forme de base
))tnsin(bt)ncos(a(a)t(s 0n1n
0n0 ω+ω+= ∑∞
=
000 T
2f2 π=π=ω
∫=T
00 dt)t(sT1a
∫ ω=T
0 0n dt)tncos()t(sT2a
∫ ω=T
0 0n dt)tnsin()t(sT2b

10
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
Exemple pour signal carré :
La décomposition donne :
, n impair (=0 pour n pair)
La re-synthèse à partir de ces coefficients donne (fondamental + 3 premiers harmoniques) :
∑∞
=
ωπ
=1n n
tnsina4)t(s
-AT/2
A
++∈−+∈
=[kTT,kT2/T[tpourA
[kT2/T,0[tpourA)t(s
III) Séries de Fourier
III.1) Forme de base

11
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
Exemple pour signal triangulaire :
La décomposition donne :
, n impair (=0 pour n pair)
La re-synthèse à partir de ces coefficients donne (fondamental + 3 premiers harmoniques) :
III) Séries de Fourier
III.1) Forme de base
-AT/2
∈−−∈+
=[4/T3,4/T]tpourtA2
[4/T,4/T[tpourt)t(s
( )∑∞
=
− ω−π
=1n
22
1n
2 ntnsin)1(A8)t(s

12
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
Exemple pour signal en dents de scie :
La décomposition donne :
La re-synthèse à partir de ces coefficients donne (fondamental + 3 premiers harmoniques) :
[kT2/T,kT2/T[tpourtTA2)t(s ++−∈=
-AT
A
III) Séries de Fourier
III.1) Forme de base
∑∞
=
− ω−π
=1n
1n
n)tnsin()1(A2)t(s
13
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
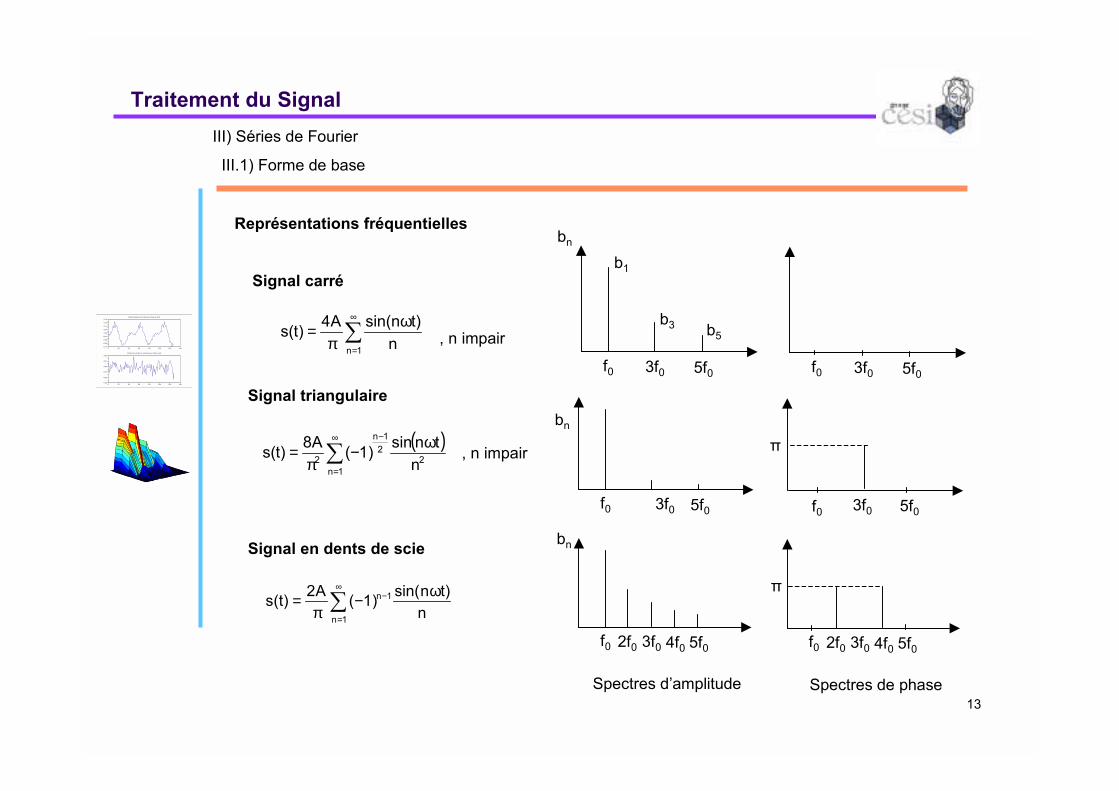
Représentations fréquentielles
Signal carré
, n impair
Signal triangulaire
, n impair
Signal en dents de scie
f0 3f0 5f0
bn
b1
b3 b5
f0 3f0 5f0
bn
f0 3f0 5f02f0 4f0
bn
∑∞
=
ωπ
=1n n
)tnsin(A4)t(s
∑∞
=
− ω−π
=1n
1n
n)tnsin()1(A2)t(s
III) Séries de Fourier
III.1) Forme de base
( )∑∞
=
− ω−π
=1n
22
1n
2 ntnsin)1(A8)t(s
Spectres d�amplitude
f0 3f0 5f0
f0 3f0 5f0
f0 3f0 5f02f0 4f0
Spectres de phase
π
π

14
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
Exemple d�un signal quelconque
Signal périodique quelconque (ici ni pair ni impair), de fréquence f0 :
peut se mettre sous la forme d�une somme de sinusoïdes et cosinusoïdes :
! Etonnant, non ?
s(t)
t0
)tncos(a)tnsin(ba)t(s1n
0n1n
0n0 ∑∑∞
=
∞
=
ω+ω+=
T0
III) Séries de Fourier
III.1) Forme de base
15
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
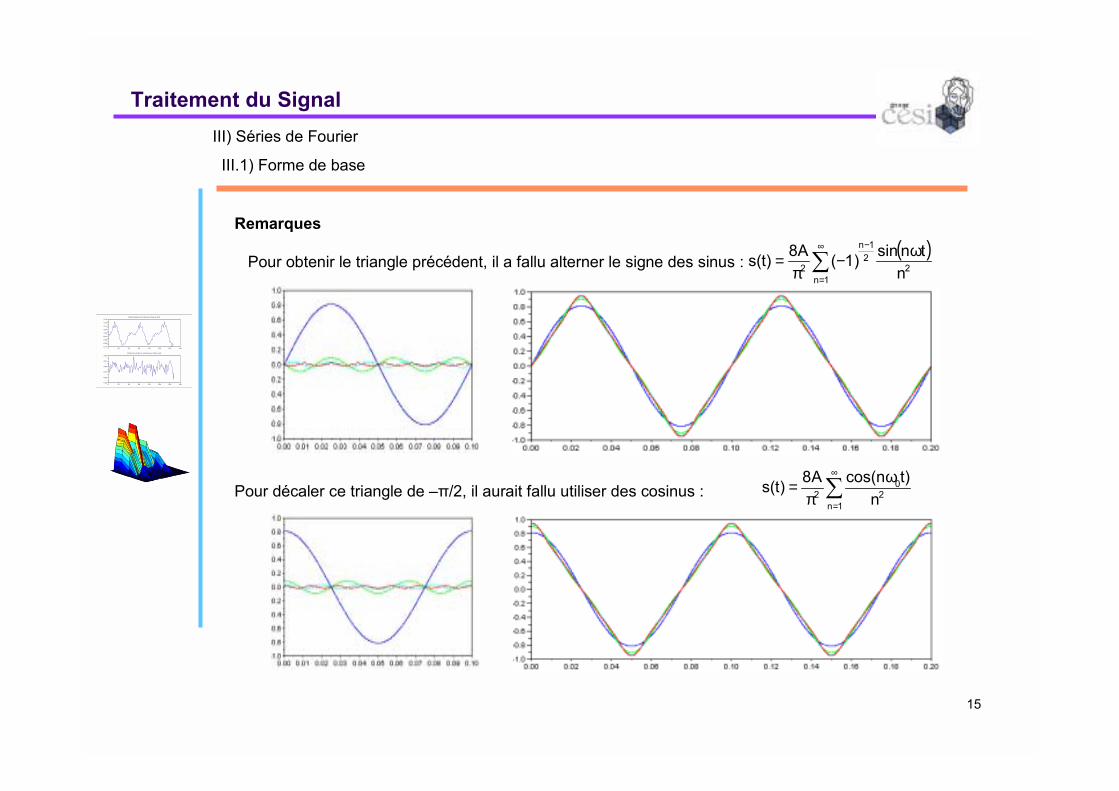
Remarques
Pour obtenir le triangle précédent, il a fallu alterner le signe des sinus :
Pour décaler ce triangle de �π/2, il aurait fallu utiliser des cosinus :
III) Séries de Fourier
III.1) Forme de base
∑∞
=
ωπ
=1n
20
2 n)tncos(A8)t(s
( )∑∞
=
− ω−π
=1n
22
1n
2 ntnsin)1(A8)t(s
16
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
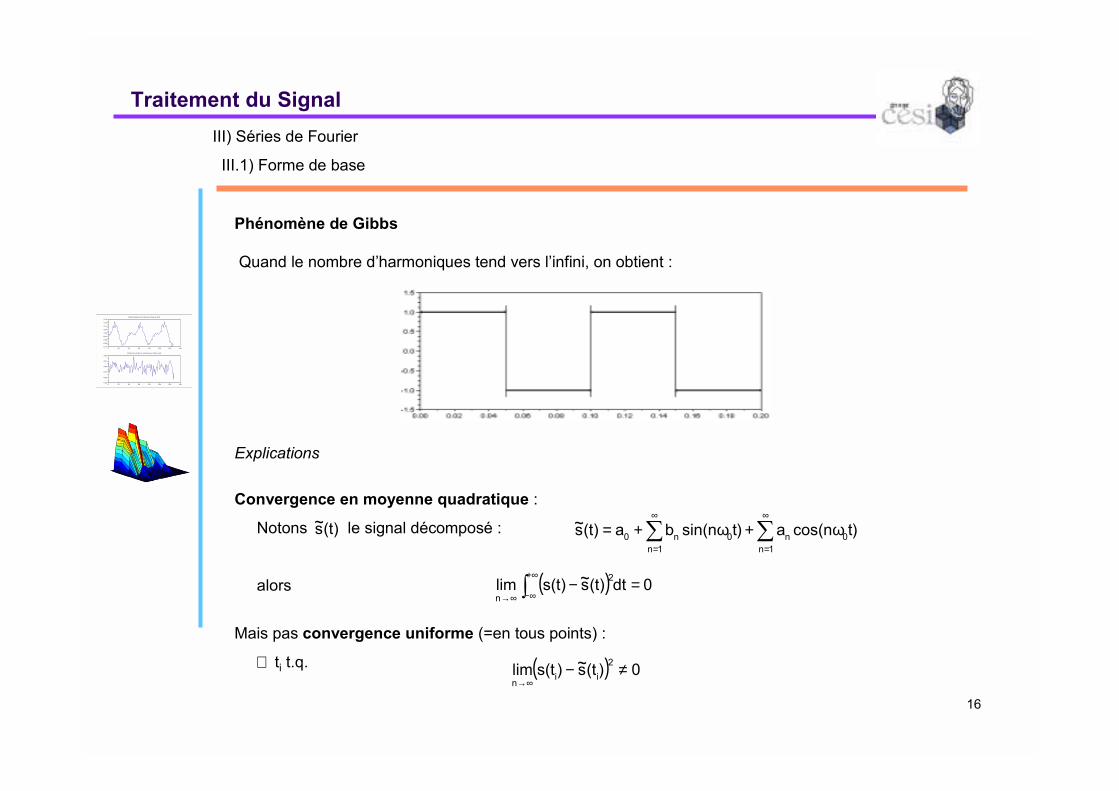
Phénomène de Gibbs
Quand le nombre d�harmoniques tend vers l�infini, on obtient :
Explications
Convergence en moyenne quadratique :
Notons le signal décomposé :
alors
Mais pas convergence uniforme (=en tous points) :
ti t.q.
III) Séries de Fourier
III.1) Forme de base
)tncos(a)tnsin(ba)t(s~1n
0n1n
0n0 ∑∑∞
=
∞
=
ω+ω+=)t(s~
∃
( ) 0dt)t(s~)t(slim 2
n=−∫
+∞
∞−∞→
( ) 0)t(s~)t(slim 2ii
n≠−
∞→

17
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
III) Séries de FourierIII.2) Forme avec un seul coefficient
s(t) peut se mettre sous la forme suivante :
avec
et
Intérêt : séparation en spectre d�amplitude et spectre de phase :
∑∞
=
ϕ+ω+=1n
n0n0 )tncos(ca)t(s
2n
2nn bac +=
=ϕ
n
nn a
barctg
f0 3f0 5f02f0 4f0
|Cn|
a0
C1
C2C3 C4
f f0 3f0 5f02f0 4f0
arg(Cn)
φ1φ2
φ3φ4
f
φ5

18
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
III) Séries de FourierIII.3) Forme complexe
En utilisant les formules d�Euler :
on obtient une nouvelle expression (complexe) du signal :
avec
Avantage : forme compacte
Interprétation : fréquences négatives (!)
∑∞
−∞=
ω=n
tjnnec)t(s
∫ ω−=T
0
tjnn dte)t(s
T1c
2eecos
jα−α +=α 2eej
j2eesin
jj α−αα−α −−=−=α
19
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
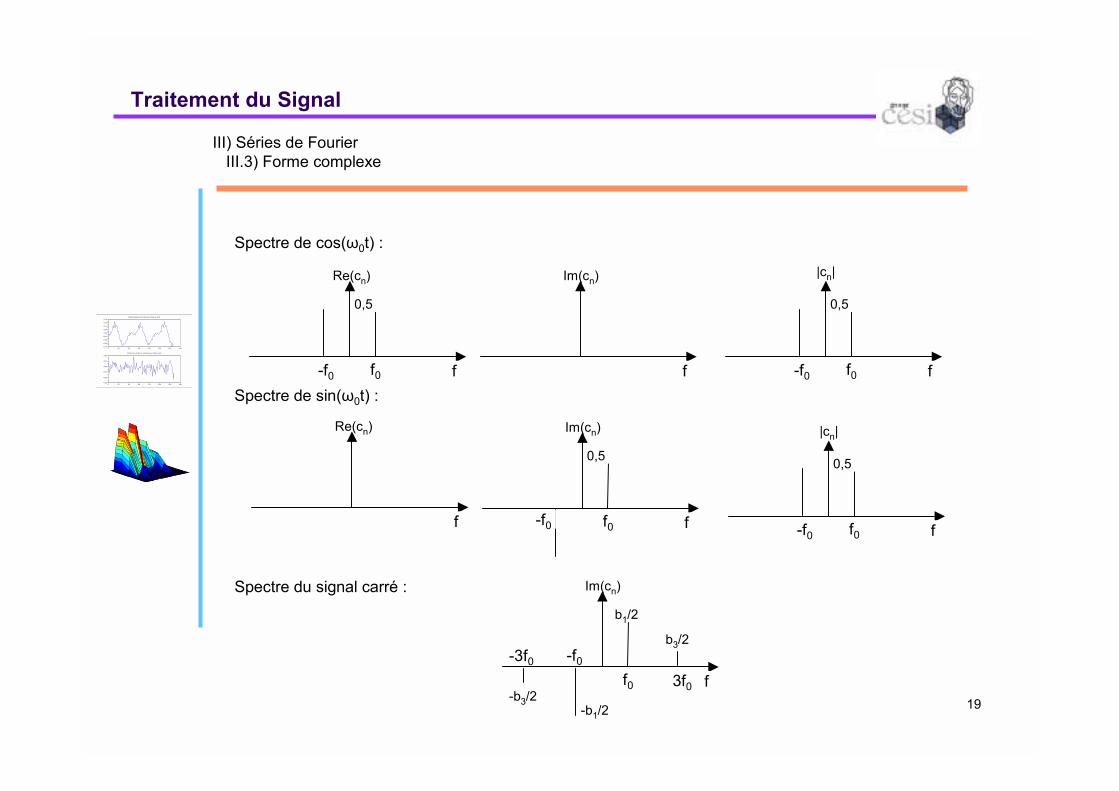
Spectre de cos(ω0t) :
Spectre de sin(ω0t) :
Spectre du signal carré :
f0
Re(cn)
0,5
-f0 f
Im(cn)
f f0
|cn|
0,5
-f0 f
f0
Im(cn)
0,5
-f0 f
Re(cn)
f f0
|cn|
0,5
-f0 f
f0
Im(cn)
b1/2
-f0f
b3/2
-b1/2-b3/2
3f0
-3f0
III) Séries de FourierIII.3) Forme complexe

20
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
Représentation du passage de sin(ωt) à cos(ωt) :
Re
Im
f
sin cos
III) Séries de FourierIII.3) Forme complexe

21
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
III) Séries de Fourier
III.4) Formalisation
[ ])Ff()Ff(2j)f(S 00 −δ−+δ=
[ ])Ff()Ff(21)f(S 00 −δ++δ=
Exemples :
Cosinus :
Sinus :
Formalisation des spectres de fréquence, par utilisation de l�impulsion de Dirac :
+∞=δ )0( 0)0t( =≠δ 1dt)t( =δ∫+∞
∞−
=δ
→ Ttrect
T1lim)t(
0T
voir Théorie des Distributions
)t(δDéfinition de :
On peut l�obtenir par exemple de la manière suivante :
Importance de :
- permet de connaître la réponse impulsionnelle d�un système
(qui permet à son tour de connaître la réponse du système à n�importe quel signal)
- outil mathématique très utile (échantillonnage, Transformée de Fourier, etc)
)t(δ
)t(δ0
δ(t)
t
1
t0
δ(t-t0)
t
1

22
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
III) Séries de Fourier
III.4) Formalisation
Propriétés de :)t(δ
)0(s)t().t(s ≠δ
)0(sdt)t().t(s =δ∫+∞
∞−
)t(sdt)tt().t(s 00 =−δ∫+∞
∞−
)tt().t(s)tt().t(s 000 −δ=−δ
∑+∞
−∞=
−δ=δk
T )kTt()t(
Peigne de Dirac
∑∑+∞
−∞=
+∞
−∞=
−δ=−δkk
)kTt().kT(x)kTt().t(x
Utile pour l�étude de l�échantillonnage des signaux
)t().0(s)t().t(s δ=δ

23
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
III) Séries de Fourier
III.5) Répartition de l�énergie
On peut démontrer la propriété suivante :
Il y a donc conservation de l�énergie en passant de la représentation temporelle à la représentation fréquentielle.
Avec les coefficients complexe ci :
C�est le théorème de Parseval (ou Besse-Parseval)
)ba(lim21adt)t(s
T1P 2
n2n
N
1nN
20
Tt
t
20
0
++== ∑∫=∞→
+
∑−=∞→
=N
Nn
2
nN
climP
24
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
III) Séries de Fourier
III.6) Approfondissements théoriques
Rappels
Continuité
Une fonction est continue en un point si la valeur de la fonction en ce point est la même que l�on y arrive par la droite ou par la gauche.
Si le nombre de points de discontinuité sur un intervalle est fini, et qu�elle admet des limites finies à droite et à gauche, la fonction est continue par morceaux :
Exemple de fonction continue par morceaux : signal carré, signal en dents de scie�
Dérivabilité
Une fonction est dérivable en un point si sa dérivée en ce point est finie, soit si :
Une fonction dérivable en un point est continue en ce point.
∞<−−=
→0
0
xx0 xx
)x(f)x(flim)x('f0
)x(flim)x(flim00 xxxx −+ →→
=

25
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
III) Séries de Fourier
III.6) Approfondissements théoriques
Notions de convergence
Pour savoir si le signal approximé (noté ici) représente bien le signal original s(t), on définit plusieurs types de convergences.
Convergence en moyenne
Convergence en moyenne quadratique(=moyenne au sens de l�énergie)
Convergence uniforme
Convergence ponctuelle (=convergence simple)
Il en existe d�autres� (voir plus tard)
On étudie la limite de ces quantités, quand
Pour avoir convergence, il faut que cette limite tende vers 0.
)t(s~
( ) dt)t(s~)t(sI
2∫ −
dt)t(s~)t(sI∫ −
( ) It,)t(s~)t(ssup ∈−
∞→n
It,)t(s~)t(s ∈∀−

26
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
III) Séries de Fourier
III.6) Approfondissements théoriques
Notions de convergence
Exemple
Soit sn(t) une suite de signaux définis sur [0,1] par :et s(t) le signal défini par :
Convergence simple On cherche si sn(t) s(t) quand On a : donc il y a convergence simple
Convergence uniforme
Pour n fixé, donc on n�a pas convergence uniforme.
Convergence en moyenne quadratique
Donc on a la convergence en moyenne quadratique. On aurait pu montrer de la même manière qu�on a la convergence en moyenne
nn t)t(s =
=∈=
1)1(s[1,0[tpour0)t(s
∞→n→
0)t(s)t(s,It n →−∈∀
1n =5n =
t
)t(sn
)t(s
∈∀=−=−
[1,0[tt)t(s)t(s0)1(s)1(s
nn
n
1tlim)t(s)t(slim n
1t1tn
==−→→
( ) [ ] ∞→→+
=+
==− +∫∫ nqd01n2
1t1n2
1dttdt)t(s)t(s 10
1n21
0
n21
0
2n
27
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
III) Séries de Fourier
III.6) Approfondissements théoriques
Signaux décomposables en SF
Signaux intégrables (ou sommables) : espace L1(t1,t2)
Signaux de carré intégrables : espace L2(t1,t2)
Intérêt de cet espace :- notion d�énergie- notion d�orthogonalité- notion de projection
Condition d�application de la décomposition en SF : s(t) L1(0,T) ou L2(0,T)
∞<∫ dt)t(s2
1
t
t
2
∞<∫ dt)t(s2
1
t
t
∈

28
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
III) Séries de Fourier
III.6) Approfondissements théoriques
Bases orthogonales
Rappel : produit scalaire
2 fonctions x(t) et y(t) sur l�intervalle [t1,t2] :
2 vecteurs et
Produit scalaire sur [0,T] de 2 fonctions exponentielles et :
Les fonctions forment une base orthogonale
Développement en série : cas général
avec
Cas des séries de Fourier :
0dtee)t(y),t(xT
0
tjntjn 21 =>=< ∫ ω−ω
tjn2e)t(y ω=tjn1e)t(x ω=
∫>=< 2
1
t
tdt)t(y)t(x)t(y),t(x
{ }n21 x,...,x,xx = { }n21 y,...,y,yy = i
n
0iiy.xy.x ∑
=
=
tjne)t(x ω=
∑+∞
=
Φ=1n
nn )t(a)t(s ∫ Φ>=Φ=<T
0 nnn dt)t(s),t(sa 0, *lk >=ΦΦ< lk,l,k ≠Ζ∈∀
tjnn e ω−=Φ
Ζ∈∀ 21 n,n
29
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.1) Définition
Définition
Comparaison avec Transformée de Laplace :
Fourier cas particulier de Laplace avec :
Transformée inverse :
Condition d�application :
( ) ∫+∞
−∞=
π−==t
ft2j dte)t(s)t(sF)f(S
( ) ∫+∞
=
−−
==0t
ptdte)t(s)t(sL)p(S ω+σ= jp
ω= jp
( ) ∫+∞
−∞=
π− ==f
ft2j1 dfe)f(S)f(SF)t(s
∞<∫+∞
−∞=tdt.)t(x
30
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.2) Propriétés
Linéarité
Parité
Cas d�un signal réel :� Si s(t) est une fonction paire, alors S(f) est une fonction paire et réelle.� Si s(t) est une fonction impaire, alors S(f) est une fonction impaire et imaginaire.� Si s(t) n�est ni paire ni impaire, alors S(f) comporte une partie réelle paire et une partie imaginaire
impaire.Remarque : le signal peut être complexe (purement théorique)
Changement d�échelle (ou homothétie)
Dérivation
Intégration
)f(Y.b)f(X.a)t(y.b)t(x.a F +→←+
→←
afX
a1)at(x F
)f(X.)f2j(dt
)t(xd nFn
n
π→←
)f(X.j1d).(x F
t
0ω
→←ττ∫

31
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.2) Propriétés
Translation
a) temporelle
avec b) Fréquentielle
Théorème de Parseval (ou de Bessel-Parseval)
Convolution
Densité spectrale de puissance
ℜ∈a
∫∫+∞
∞−
+∞
∞−= df)f(Sdt)t(s 22
)af(Xe).t(x Fat2j −→←π
af2jF e).f(X)at(x π−→←−
)f(Y).f(X)t(y*)t(x F→
)f(Y*)f(X)t(y).t(x F→ ∫+∞
−∞=−=
udu)ut(x)u(y)t(y*)t(x
Rappel :
2)f(S
Conservation de l�énergie

32
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.2) TF de quelques signaux courants
Tableau de transformées
S(f)=F[s(t)]s(t)
[ ])ff()ff(21
00 −δ++δ)tf2cos()t(s 0π=
)tf2sin()t(s 0π= [ ])ff()ff(2j
00 −δ−+δ
=ΠTtrect)
Tt(
Tttri
)Tf(csinT
)Tf(csinT 2
∑+∞
−∞=
−δ=δn
T )nTt()t( )f(T1)
Tnf(
T1
T1
n
δ=−δ∑+∞
−∞=
)f(δ
)t(δ 1
1
33
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.2) TF de quelques signaux courants
Quelques démonstrations
Signal porte
Rappel :
Signal sinusoïdal
∫+∞
−∞=
π−=t
ft2j dte)t(s)f(S
[ ] [ ] [ ] )Tf(csinATfTsinf
Aeef2j
Aeef2j
Aef2j
AdteA fTjfTjfTjfTj2/T2/T
ft2j2/T
2/Tt
ft2j =ππ
=−π
=−π
−=π
−== π−πππ−+−
π−+
−=
π−∫
xxsin)x(csin
ππ=
[ ] )ff(Xe).t(xF 0tf2j 0 −=π
[ ] )f(1F δ=[ ] )ff(eF 0
tf2j 0 −δ=π
( ) ( ))ff()ff(21)e(F)e(F
21))tf2(cos(F)f(S 00
tf2jtf2j0
00 +δ+−δ=+=π= ππ
34
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
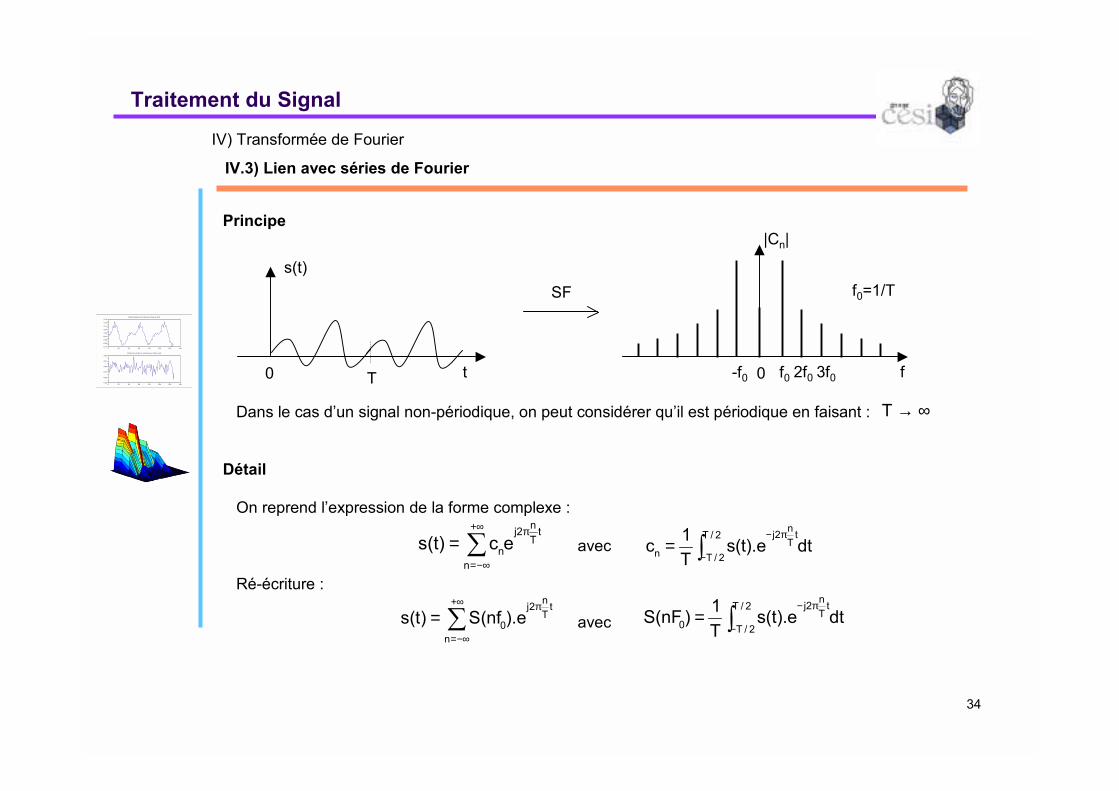
IV.3) Lien avec séries de Fourier
Principe
Dans le cas d�un signal non-périodique, on peut considérer qu�il est périodique en faisant :
Détail
On reprend l�expression de la forme complexe :
avec
Ré-écriture :
avec
∑+∞
−∞=
π=
n
tTn2j
nec)t(s ∫−π−
=2/T
2/T
tTn2j
n dte).t(sT1c
∑+∞
−∞=
π=
n
tTn2j
0 e).nf(S)t(s ∫−π−
=2/T
2/T
tTn2j
0 dte).t(sT1)nF(S
∞→T
f0 3f0
|Cn|
f-f0 00 T t 2f0
SF f0=1/Ts(t)

35
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.3) Lien avec séries de Fourier
Finalement :
avec
Interprétation :
|S(f)|
f00 t
TFs(t)
∑ ∫+∞
−∞=
π
−
τπ−
ττ=
n
tTn2j2/T
2/TTn2j
T1ede).(s)t(s
dfe.de).(s)t(s ft2jf2j π+∞
∞−
τπ−+∞
∞−
ττ= ∫∫
( ) ∫+∞
∞−
π− == dfe).f(S)f(SF)t(s ft2j1 ( ) ∫+∞
∞−
π−== dte).t(s)t(sF)f(S ft2j

36
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.4) Transformée de Fourier Discrète (TFD)
Définitionsk=0, 1, �, N-1
ou avec
TFD inverse (TFD-1): k=0, 1, �, N-1
Propriétés
Signification des indices
Entrées
Sorties
∑−
=
π−=
1N
0n
Nnk2j
e)n(xN1)k(X
∑−
=
=1N
0n
knNW)n(x
N1)k(X N
nk2jnkN eW
π−=
∑−
=
−=1N
0k
knNW)k(X)n(x
[ ]1N;0 −
[ ]1N;0 − [ ]eT)1N(;0 −
−
Nff;0 e
e

37
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.4) Transformée de Fourier Discrète (TFD)
Echantillonnage
Consiste à relever les valeurs d�un signal à intervalles de temps réguliers : la période d�échantillonnage fe.
Exemple : CD audio, son échantillonné à fe=44100Hz.
Conséquence de l�échantillonnage : réplication périodique du spectre
D�où la condition d�échantillonnage de Shannon (ou de Nyquist) :
-2fe -fe fe 2fe0
Bon
Mauvais
maxe f2f >
0 fe 2fe-2fe -fe fmax
0 fmax
maxe f2f >
maxe f2f <
spectre du signal continu
échantillonnage
38
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.4) Transformée de Fourier Discrète (TFD)
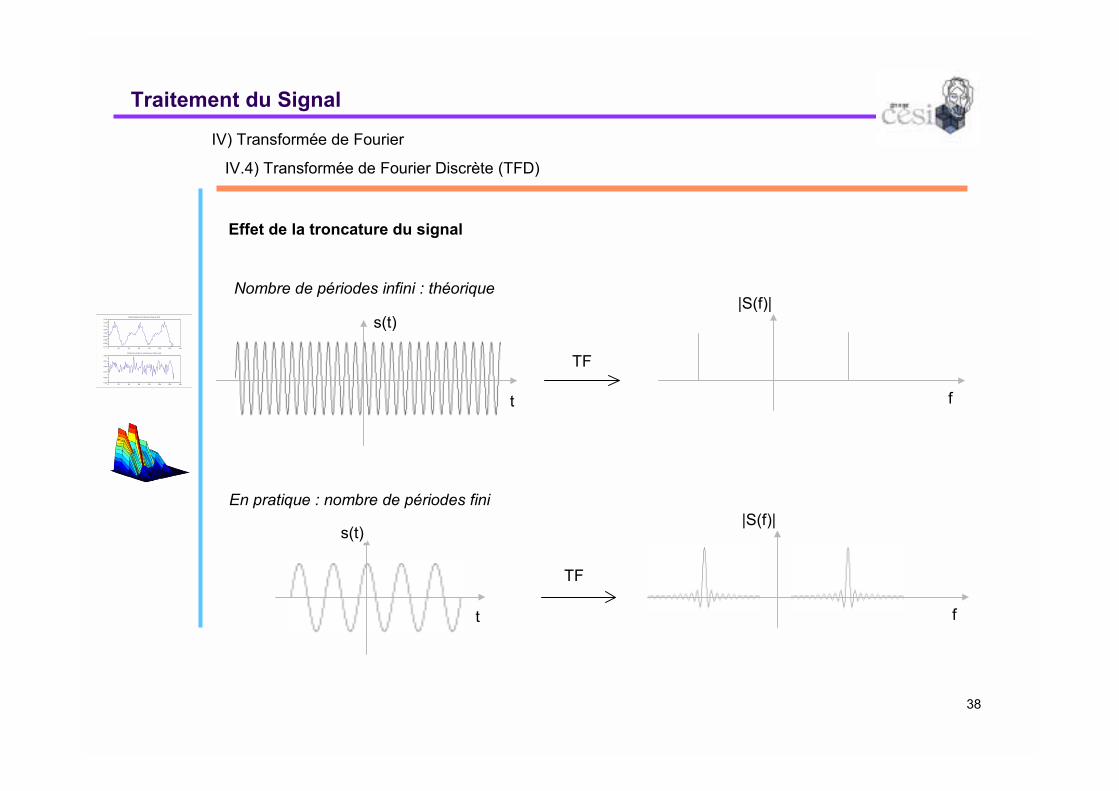
Effet de la troncature du signal
TF
TF
t
t f
s(t)
s(t)
|S(f)|
f
|S(f)|Nombre de périodes infini : théorique
En pratique : nombre de périodes fini
39
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.4) Transformée de Fourier Discrète (TFD)
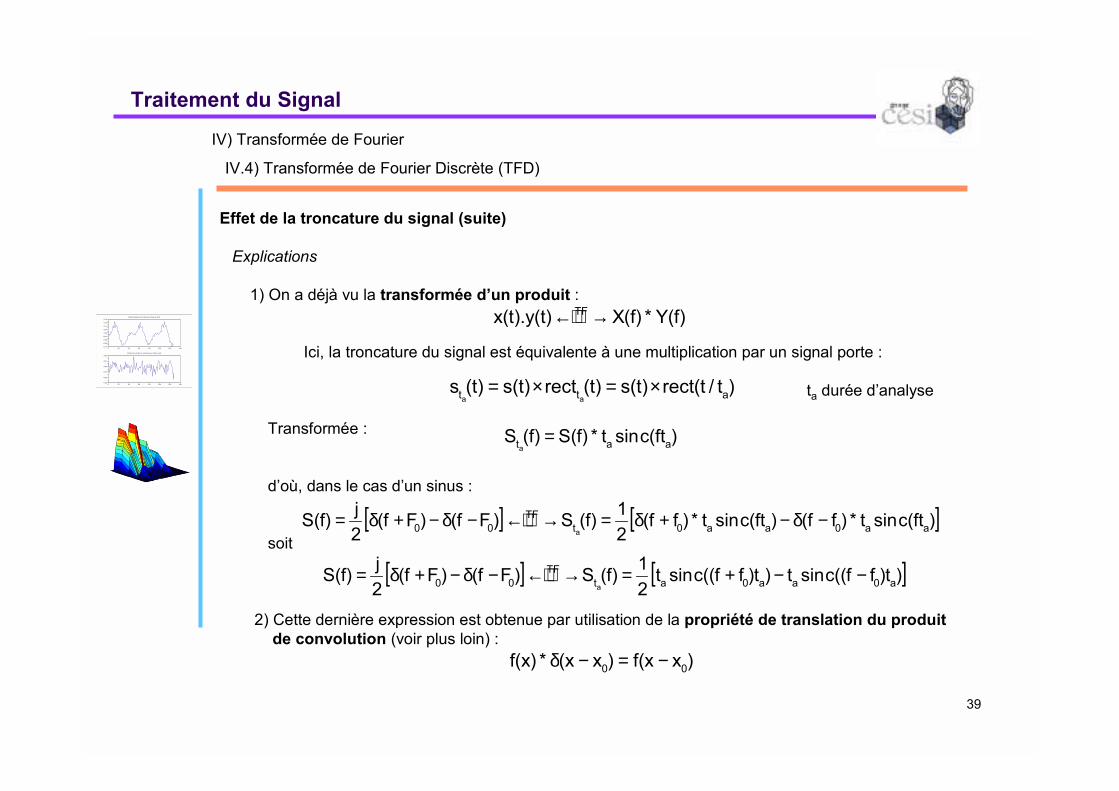
Effet de la troncature du signal (suite)
Explications
1) On a déjà vu la transformée d�un produit :
Ici, la troncature du signal est équivalente à une multiplication par un signal porte :
ta durée d�analyse
Transformée :
d�où, dans le cas d�un sinus :
soit
2) Cette dernière expression est obtenue par utilisation de la propriété de translation du produit de convolution (voir plus loin) :
)f(Y*)f(X)t(y).t(x TF→←
)t/t(rect)t(s)t(rect)t(s)t(s att aa×=×=
)ft(csint*)f(S)f(S aata=
[ ] [ ])ft(csint*)ff()ft(csint*)ff(21)f(S)Ff()Ff(
2j)f(S aa0aa0t
TF00 a
−δ−+δ=→←−δ−+δ=
[ ] [ ])t)ff((csint)t)ff((csint21)f(S)Ff()Ff(
2j)f(S a0aa0at
TF00 a
−−+=→←−δ−+δ=
)xx(f)xx(*)x(f 00 −=−δ

40
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.4) Transformée de Fourier Discrète (TFD)
En résumé�.
Pour pouvoir interpréter correctement les résultats de la programmation de la TFD, il faut prendre en compte :
- l�effet de la troncature du signal (sinus cardinaux au lieu d�impulsions de Dirac)- l�effet de l�échantillonnage (répétition périodique du spectre)- la signification des indices des points de sortie de la TFD
résumés sur le schéma suivant :
TF
t f
s(t) im(S(f))
échantillonné à Te échantillonné à fe=1/Terésolution spectrale : fe/N
fe/2 fe
N points N points
NTe
41
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.4) Transformée de Fourier Discrète (TFD)
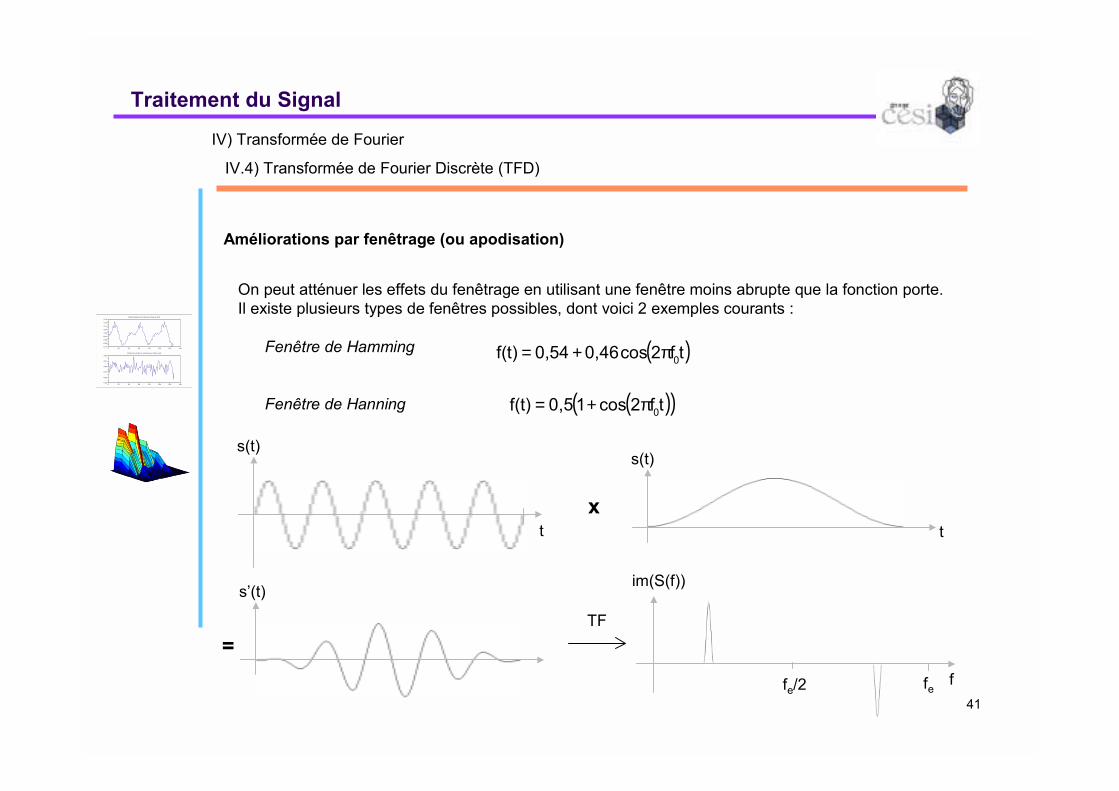
Améliorations par fenêtrage (ou apodisation)
On peut atténuer les effets du fenêtrage en utilisant une fenêtre moins abrupte que la fonction porte.Il existe plusieurs types de fenêtres possibles, dont voici 2 exemples courants :
Fenêtre de Hamming
Fenêtre de Hanning
TF
t
f
s(t)
im(S(f))
fe/2 fe
( )tf2cos46,054,0)t(f 0π+=
( )( )tf2cos15,0)t(f 0π+=
t
s(t)
x
=
s�(t)

42
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.4) Transformée de Fourier Discrète (TFD)
Transformée de Fourier Rapide (TFR, ou FFT)
Il s�agit d�un algorithme de calcul rapide de la TFDIl est basé sur des simplifications des calculs permises par les propriétés de l�exponentielle.
Rappels
L�objectif est de calculer avec , k=0,1,2,�,N
Développement selon n :, k=0,1,2,�,N
puis selon k :
������������.
Forme matricielle :
∑−
=
=1N
0n
knNW)n(x
N1)k(X N
nk2jnkN eW
π−=
)1N(xw...)1(xw)0(xw)k(X k)1N(N
k1N
k0N −+++= ×−××
)1N(xw...)1(xw)0(xw)0(X 0)1N(N
01N
00N −+++= ×−××
)1N(xw...)1(xw)0(xw)1(X 1)1N(N
11N
10N −+++= ×−××
)1N(xw...)1(xw)0(xw)1N(X )1N()1N(N
)1N(1N
)1N(0N −+++=− −×−−×−×
−−
=
−−
−×−−×−−×
−×−−×
×−×−×
)1N(x)2N(x
...)0(x
ww...ww......w
............ww...w
)1N(X)2N(X
...)0(X
)1N()1N(N
)1N()2N(N
)1N(0N
)2N()1N(N
)2N(0N
0)1N(N
0)2N(N
00N
[ ] [ ][ ]XWX =
43
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.4) Transformée de Fourier Discrète (TFD)
Transformée de Fourier Rapide (TFR, ou FFT)
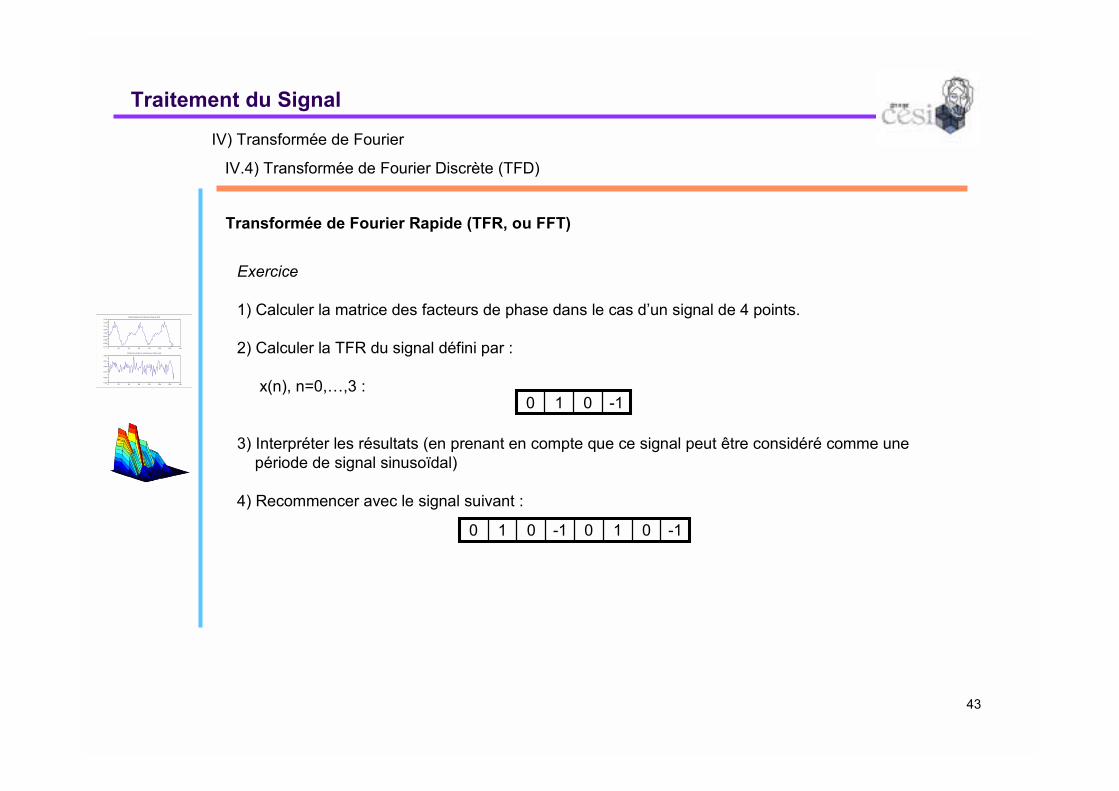
Exercice
1) Calculer la matrice des facteurs de phase dans le cas d�un signal de 4 points.
2) Calculer la TFR du signal défini par :
x(n), n=0,�,3 :
3) Interpréter les résultats (en prenant en compte que ce signal peut être considéré comme une période de signal sinusoïdal)
4) Recommencer avec le signal suivant :
-1010
-1010-1010

44
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.4) Transformée de Fourier Discrète (TFD)
Transformée de Fourier Rapide (TFR, ou FFT)
Exemples
TFD
0 1 7
1Im(S(f))
1 7
0,5
-0,5
0 7
1
TFD
|S(f)|
1 7
0,5
Re(S(f))
7
0,5
|S(f)|
1 7
0,5
1
sin(2πft)
cos(2πft)
1

45
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.4) Transformée de Fourier Discrète (TFD)
Transformée de Fourier Rapide (TFR, ou FFT)
Principe
On reconnaît 2 TFD de N/2 points : celle des termes d�indices pairs et celle des termes d�indices impairs ; seuls les sorties de ces derniers sont multipliées par un facteur de phase.
coût de calcul moindre
En répétant cette opération jusqu�à obtenir des TFD de 2 points, on obtient une forte réduction du coût de calcul :
au lieu de
k2/N
k2N W
2N
k2jexpN
k22jexpW =
π−=
π−=
kN
12/N
0n
kn
2N
kn
2N
12/N
0n
WW)1n2(xW)n2(x)k(X
++= ∑∑
−
=
−
=
)1n2(kN
12/N
0n
12/N
0n
n2kN W)1n2(xW)n2(x)k(X +
−
=
−
=∑∑ ++=
kN
12/N
0n
n2kN
12/N
0n
n2kN WW)1n2(xW)n2(x)k(X
++= ∑∑
−
=
−
=
NLog2N
22N

46
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.4) Transformée de Fourier Discrète (TFD)
Transformée de Fourier Rapide (TFR, ou FFT)
Structure (exemple pour 8 points)
X(4)
X(5)
X(6)
X(7)
X(0)
X(1)
X(2)
X(3)
x(0)
x(4)
x(2)
x(6)
x(1)
x(5)
x(3)
x(7)
02W
02W
02W
02W 1
4W
14W
04W
04W
08W18W28W38W
papillon

47
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.4) Transformée de Fourier Discrète (TFD)
Analyse spectrale
Principe
En pratique
Chevauchement des trames
Choix de la taille de la fenêtre
Compromis temps (durée la plus courte possible) � fréquence (durée la plus grande possible)
t(nTe)
FFT FFT FFT FFT
fenêtrage ××××
signal
s(n)
spectrogramme
(image obtenue avec Matplot de Scilab)
t
f
tramage

48
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.4) Transformée de Fourier Discrète (TFD)
Reconstruction du signal original
Modifications possibles :
- Etirement temporel (time stretching)Intérêt : changer la durée du signal sans changer son contenu fréquentiel
- Transposition de fréquence par décalage du spectre (pitch shifting)Intérêt (exemple) : changer la hauteur d�unevoix sans changer son timbre
- Modification du spectre (diminution ouréhaussement de l�énergie dans certaines bandes de fréquences, etc), et notamment filtrage (mais attention aux pentes raides !)
nTe
FFT FFT FFT FFT
fenêtrage ××××
signal
s(n)
FFT-1
spectrogramme
FFT-1 FFT-1 FFT-1
nTe
s(n)+

49
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.4) Transformée de Fourier Discrète (TFD)
Application aux images
Transformée directe
p=0,1,�,M-1 et q=0,1,�,N-1
m et n : dimensions spatiales de l�image originale (positions)p et q : dimensions de l�image transformée (fréquences spatiales)
F(0,0) : composante continue = valeur moyenne des pixels
Transformée inverse
m=0,1,�,M-1 et n=0,1,�,N-1
Nnq2j1M
0m
1N
0n
Mmp2j
e.e).n,m(f)q,p(Fπ−−
=
−
=
π−
∑∑=
Nnq2j1M
0p
1N
0q
Mmp2j
e.e).q,p(FMN1)n,m(f
π−
=
−
=
π
∑∑=

50
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.4) Transformée de Fourier Discrète (TFD)
Application aux images
Explication :
TF2D
=ΠTtrect)
Tt( )Tf(csinT
TF
T2T

51
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.4) Transformée de Fourier Discrète (TFD)
Applications concrètes
Prothèse auditive
Un petit boîtier monté sur ou dans les oreilles intègre un processeur spécialisé dans le traitement du signal (DSP), réalisant une TFR. Différents paramètres du spectre de fréquences obtenu peuvent alors être modifiés, en fonction des besoins de l�utilisateur :
· l�énergie du signal dans les bandes de fréquence,
· modification du contenu spectral (pitch et voisement),
· modification de l'enveloppe spectrale,
· modification du rythme temporel.
Un signal temporel modifié est alors re-synthétisé et généré en son.
52
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.4) Transformée de Fourier Discrète (TFD)
Applications concrètes
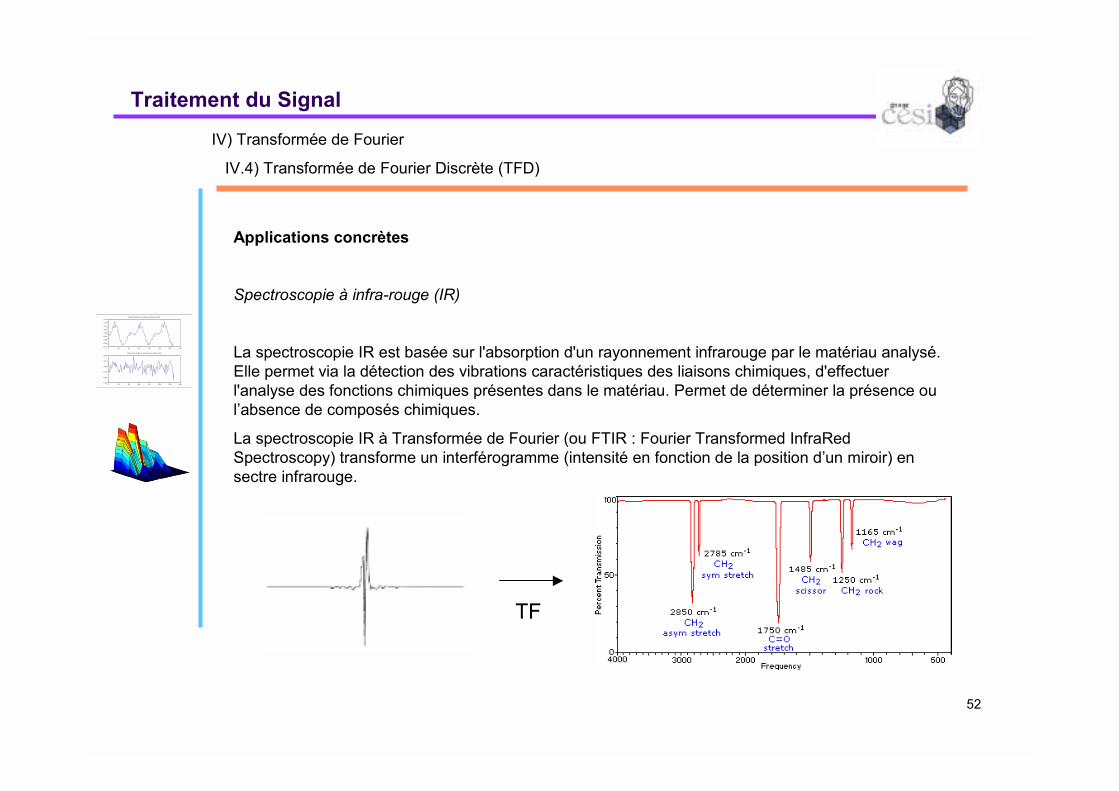
Spectroscopie à infra-rouge (IR)
La spectroscopie IR est basée sur l'absorption d'un rayonnement infrarouge par le matériau analysé. Elle permet via la détection des vibrations caractéristiques des liaisons chimiques, d'effectuer l'analyse des fonctions chimiques présentes dans le matériau. Permet de déterminer la présence ou l�absence de composés chimiques.
La spectroscopie IR à Transformée de Fourier (ou FTIR : Fourier Transformed InfraRed Spectroscopy) transforme un interférogramme (intensité en fonction de la position d�un miroir) ensectre infrarouge.
TF

53
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
IV) Transformée de Fourier
IV.4) Transformée de Fourier Discrète (TFD)
Applications concrètes
Format d�images JPEG
Compression :
Décompression :
Les mêmes étapes mais en sens inverse.

54
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.1) Introduction
Objectifs
En général : laisser passer certaines choses et en retenir d�autres.
En traitement du signal : ces choses = plages (ou bandes) de fréquences.
Nuance : filtrage actif = augmenter (l�énergie de) certaines bandes de fréquences.
Exemple : filtrage passe-bas : ne laisse passer que des basses fréquences.
Définitions
Un filtre est un système linéaire. Il peut être décrit par
- une équation différentielle linéaire
- une fonction de transfert de Laplace
- un produit de convolution avec sa réponse impulsionnelle
Ces 3 descriptions sont équivalentes.
En général, le système est stationnaire : coefficients de l�équa. diff. constants.
55
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.1) Introduction
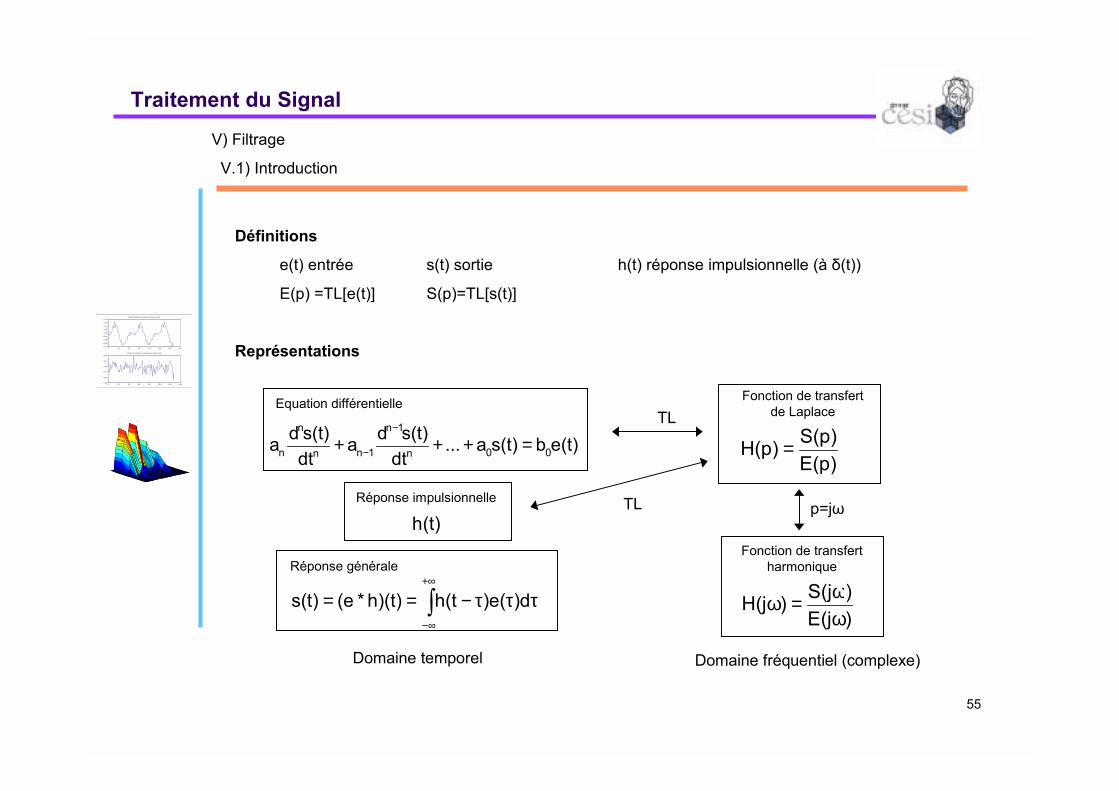
Définitions
e(t) entrée s(t) sortie h(t) réponse impulsionnelle (à δ(t))
E(p) =TL[e(t)] S(p)=TL[s(t)]
Représentations
)p(E)p(S)p(H =
)j(E)j(S)j(H
ωω=ω
)t(eb)t(sa...dt
)t(sdadt
)t(sda 00n
1n
1nn
n
n =+++−
−
∫+∞
∞−
τττ−== d)(e)t(h)t)(h*e()t(s
Domaine temporel Domaine fréquentiel (complexe)
p=jω)t(h
TL
TLEquation différentielle
Réponse impulsionnelle
Réponse générale
Fonction de transfert de Laplace
Fonction de transfert harmonique
56
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.1) Introduction
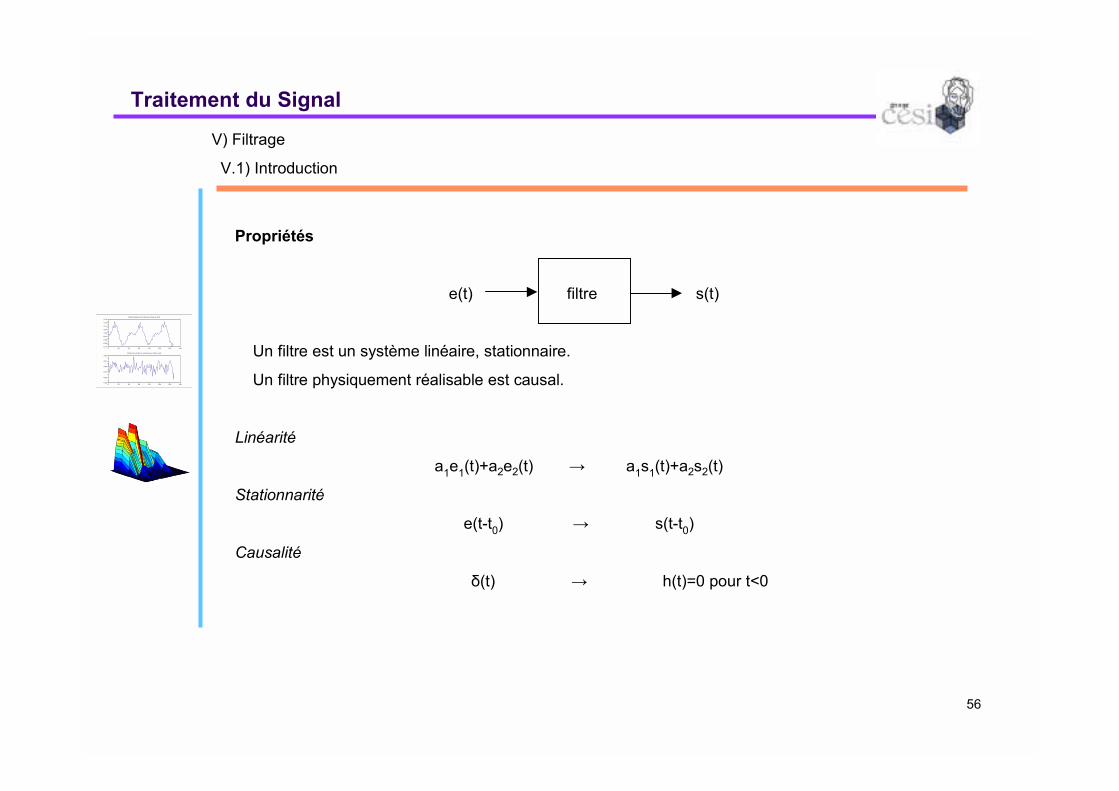
Propriétés
e(t) filtre s(t)
Un filtre est un système linéaire, stationnaire.
Un filtre physiquement réalisable est causal.
Linéarité
a1e1(t)+a2e2(t) → a1s1(t)+a2s2(t)
Stationnarité
e(t-t0) → s(t-t0)
Causalité
δ(t) → h(t)=0 pour t<0
57
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.1) Introduction
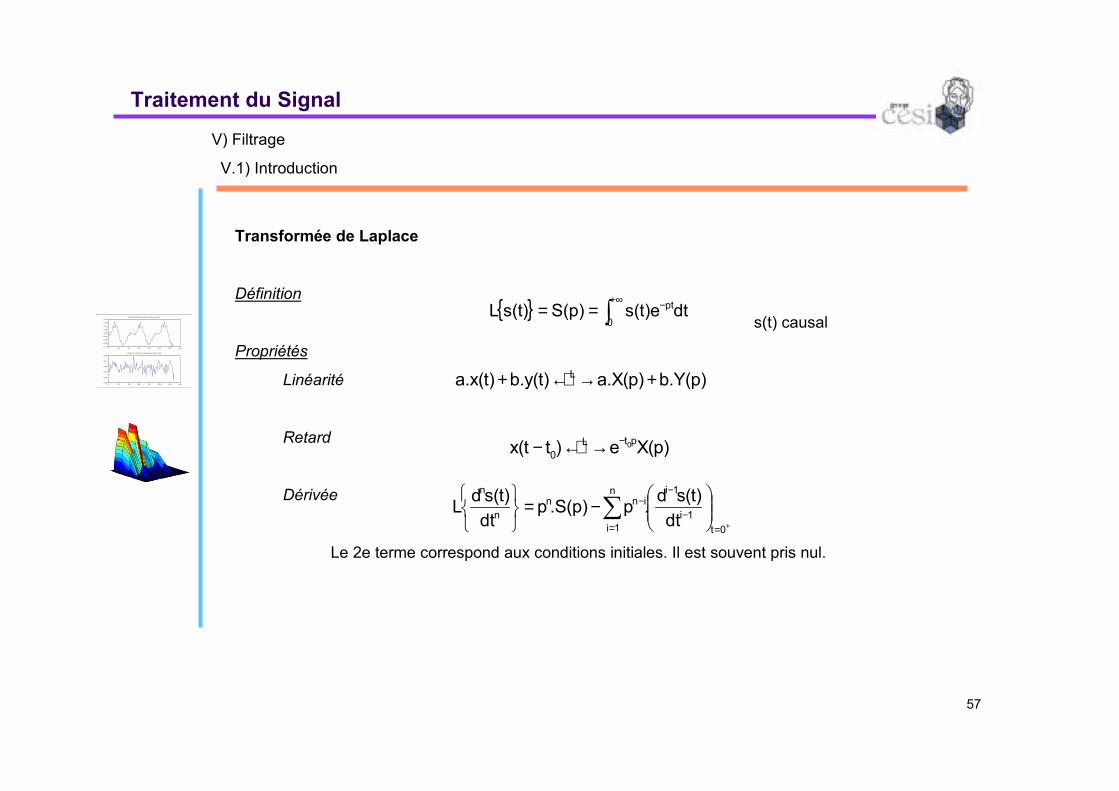
Transformée de Laplace
Définition
s(t) causal
Propriétés
Linéarité
Retard
Dérivée
Le 2e terme correspond aux conditions initiales. Il est souvent pris nul.
{ } ∫+∞ −==
0
ptdte)t(s)p(S)t(sL
)p(Y.b)p(X.a)t(y.b)t(x.a L +→←+
+==−
−−∑
−=
0t
n
1i1i
1iinn
n
n
dt)t(sd.p)p(S.p
dt)t(sdL
)p(Xe)tt(x ptL0
0−→←−
58
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.1) Introduction
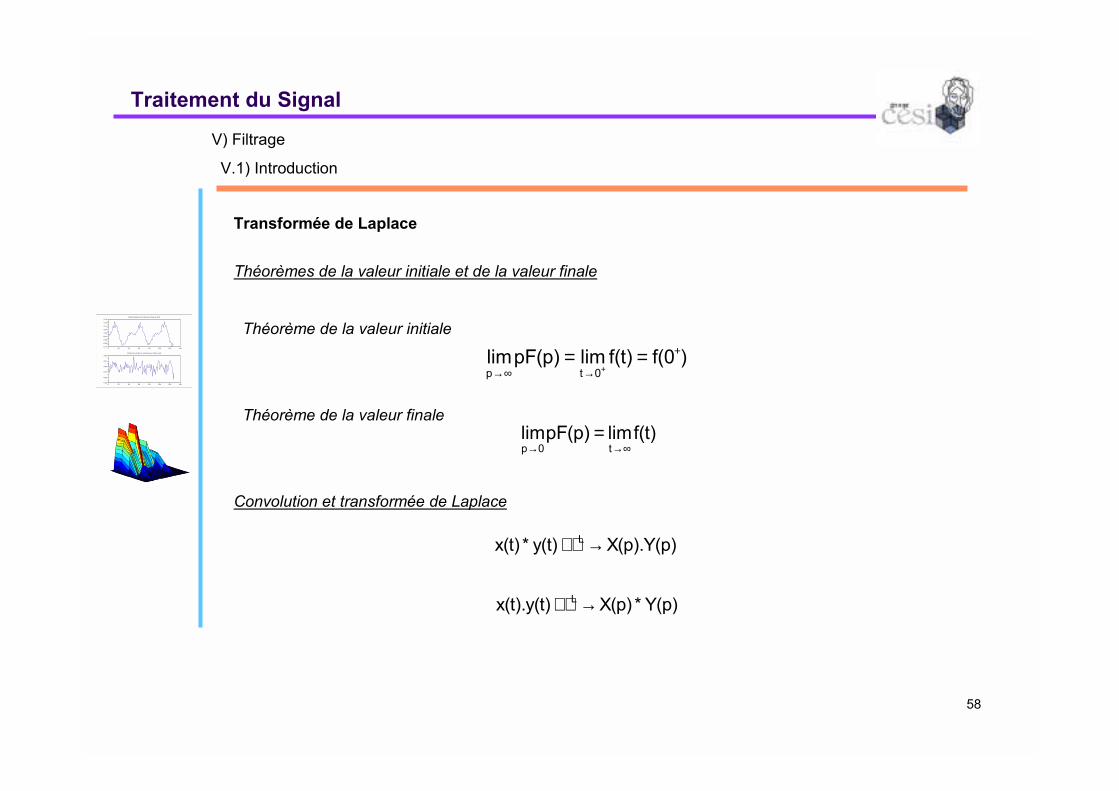
Transformée de Laplace
Théorèmes de la valeur initiale et de la valeur finale
Théorème de la valeur initiale
Théorème de la valeur finale
Convolution et transformée de Laplace
)0(f)t(flim)p(pFlim0tp
+
→∞→==
+
)t(flim)p(pFlimt0p ∞→→
=
)p(Y).p(X)t(y*)t(x L→
)p(Y*)p(X)t(y).t(x L→
59
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.1) Introduction
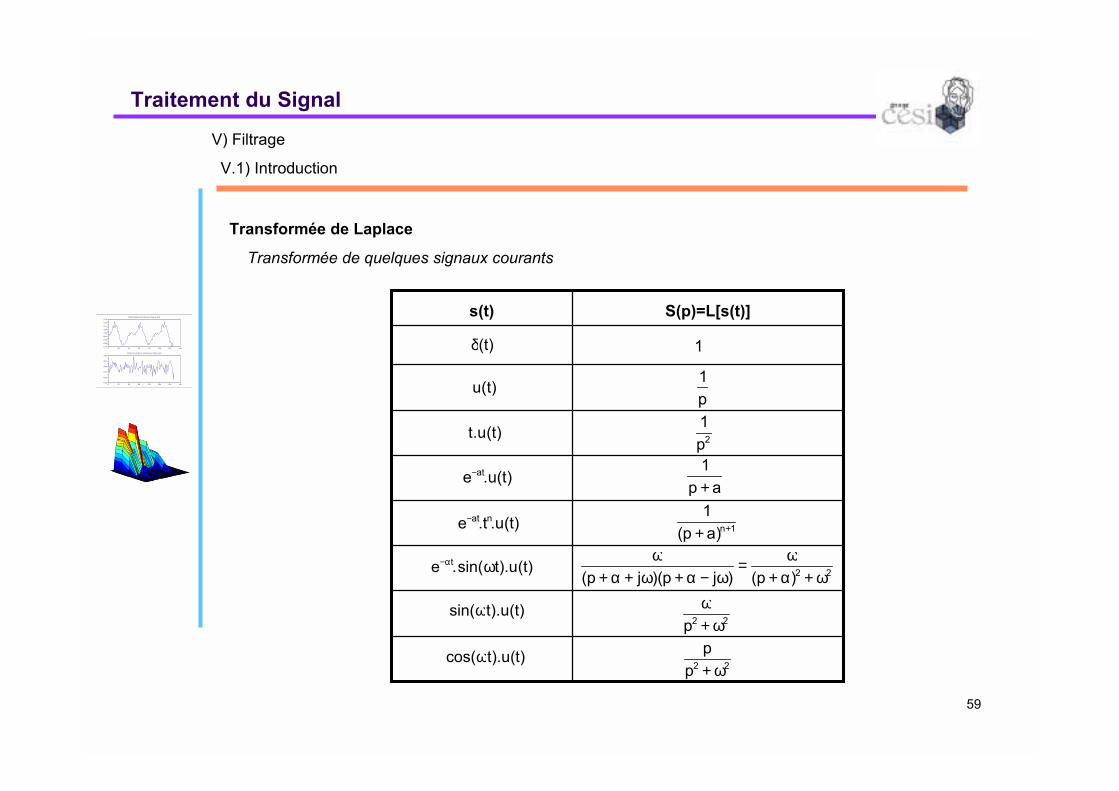
Transformée de Laplace
Transformée de quelques signaux courants
S(p)=L[s(t)]s(t)
)t(δ 1
)t(up1
)t(u.t 2p1
)t(u).tsin(ω22p ω+
ω
)t(u).tcos(ω22p
pω+
)t(u.e at−
ap1+
)t(u.t.e nat−1n)ap(
1++
)t(u).tsin(.e t ωα−22)p()jp)(jp( ω+α+
ω=ω−α+ω+α+
ω

60
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.1) Introduction
Transformée de Laplace
Exercice
1) Calculer la transformée de Laplace de l�échelon unité u(t) (=1 pour t 0, 0 pour t<0)
2) Calculer la transformée de Laplace d�une impulsion de Dirac décalée : δ(t-t0)
≥

61
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.2) Réponse impulsionnelle
Importance
Permet de caractériser complètement un système, par le biais de :
- sa réponse à n�importe quel signal, de n�importe quelle fréquence
- sa fonction de transfert de Laplace
Lien entre réponse impulsionnelle et fonction de transfert
Réponse du système à une entrée quelconque e(t) : produit de convolution
Rappel
↔ l�impulsion de Dirac comporte toutes les fréquences
∫+∞
∞−
τττ−== d)(e)t(h)t)(h*e()t(s
)p(H)t(h LaplacedeeTransformé →
1)t( FourierdeeTransformé →δ
62
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.2) Réponse impulsionnelle
Remarque : l�impulsion de Dirac δ(t) n�est pas une fonction, mais une distribution
Rappel : δ(t) est définie par :
Une distribution permet de définir indirectement une fonction : par une fonctionnelle :Soit φ une distribution, la fonctionnelle de f, Tf est définie par :
φ peut être quelconque, mais doit être :- à support borné (=nulle en dehors d�un intervalle borné)- indéfiniment dérivable
La théorie des distributions permet de formaliser, entre autres :- de définir la dérivée de fonctions non dérivables, ex. de l�échelon :- la représentation fréquentielle des signaux sinusoïdaux :- la représentation fréquentielle de l�impulsion de Dirac
(qui comporte toutes les fréquences) :- l�opération d�échantillonnage : - etc.
+∞=δ )0( 0)0t( =≠δ 1dt)t( =δ∫+∞
∞−
∫+∞
∞−
ϕ=ϕ dt)t()t(f)(Tf
1)t( F→δ
[ ])ff()ff(2j)tf2sin( 00
F0 −δ−+δ→π
)t()t(u dt/d δ →
∑∑+∞
−∞=
+∞
−∞=
−δ=−δkk
)kTt().kT(x)kTt()t(x

63
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.3) Description d�un filtre par une équation différentielle
Cas général
e(t) signal d�entrée
s(t) signal de sortie
Nb≤Na
Résolution
Principe : utilisation de la propriété de dérivation de la transformée de Laplace (TL) :
où : f(t) une fonction du temps
F(p) sa transformée de Laplace
(pour simplifier, les conditions initiales sont ici prises nulles)
Etapes de résolution :
- on applique cette propriété à e(t), s(t) et leurs dérivées respectives
- on exprime S(p) en fonction de E(p)
- on remplace E(p) par son expression
- par TL inverse, on détermine alors s(t), la réponse à e(t)
)p(Fpdt
)t(fd nTLn
n
→←
∑∑==
=ba N
0nn
n
n
N
0nn
n
n dt)t(edb
dt)t(sda
64
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
Cas du 1er ordre
Exemple d�équation différentielle :
Transformée de Laplace (en supposant les conditions initiales nulles)
Résolution pour e(t)=δ(t) (δ(t)=impulsion de Dirac, donc s(t)=réponse impulsionnelle) :
-remplacement de E(p) par 1 (=TL(δ(t))
-consultation de la table des transformées
=h(t), notation habituelle de la réponse impulsionnelle
)t(e.b)t(s.adt
)t(ds =+
ate.b)t(s −=
)p(E.b)p(S.a)p(pS =+
)p(E.b)ap)(p(S =+
))p(H(ap
b)p(E)p(S =
+=
V) Filtrage
V.3) Description d�un filtre par une équation différentielle

65
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
Exemple du 1er ordre : circuit RC
R : résistance
C : condensateur
i(t) : courant
e(t), s(t) : tensions
Equation différentielle
Résolution pour e(t)=δ(t) (→ réponse impulsionnelle)
e(t) s(t)R
C
R)t(s)t(e)t(i −=
dt)t(dsC)t(i =
)t(e)t(sdt
)t(dsRC =+
RCt
eRC1)t(s
−=
i(t)
V) Filtrage
V.3) Description d�un filtre par une équation différentielle

66
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
Cas du 2e ordre
Exemple d�équation différentielle :
Transformée de Laplace :
)t(e)t(sadt
)t(dsadt
)t(sda 012
2
2 =++
)p(E)p(Sa)p(pSa)p(Spa 012
2 =++
)p(E)apapa)(p(S 012
2 =++
))p(H(apapa
1)p(E)p(S
012
2
=++
=
2
0
2
122aap
aap
1.a1
++=
V) Filtrage
V.3) Description d�un filtre par une équation différentielle

67
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.3) Description d�un filtre par une équation différentielle
Cas du 2e ordre : résolution (pour une entrée donnée e(t))
Pour e(t)= δ(t) : E(p)=1
→ s(t) réponse impulsionnelle
! ∆>0 : 2 racines réelles r1 et r2
! ∆ =0 : 1 racine réelle double r
! ∆ <0 : 2 racines complexes conjuguées r1,2=α+jβ
c, d des constantes
De même, on peut remplacer E(p) par la TL de n�importe quel signal
→ s(t) réponse du système à ce signal
( )ϕ+β= α tcose.c)t(s t
rte).dct()t(s +=
trtr 21 dece)t(s +=
68
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.3) Description d�un filtre par une équation différentielle
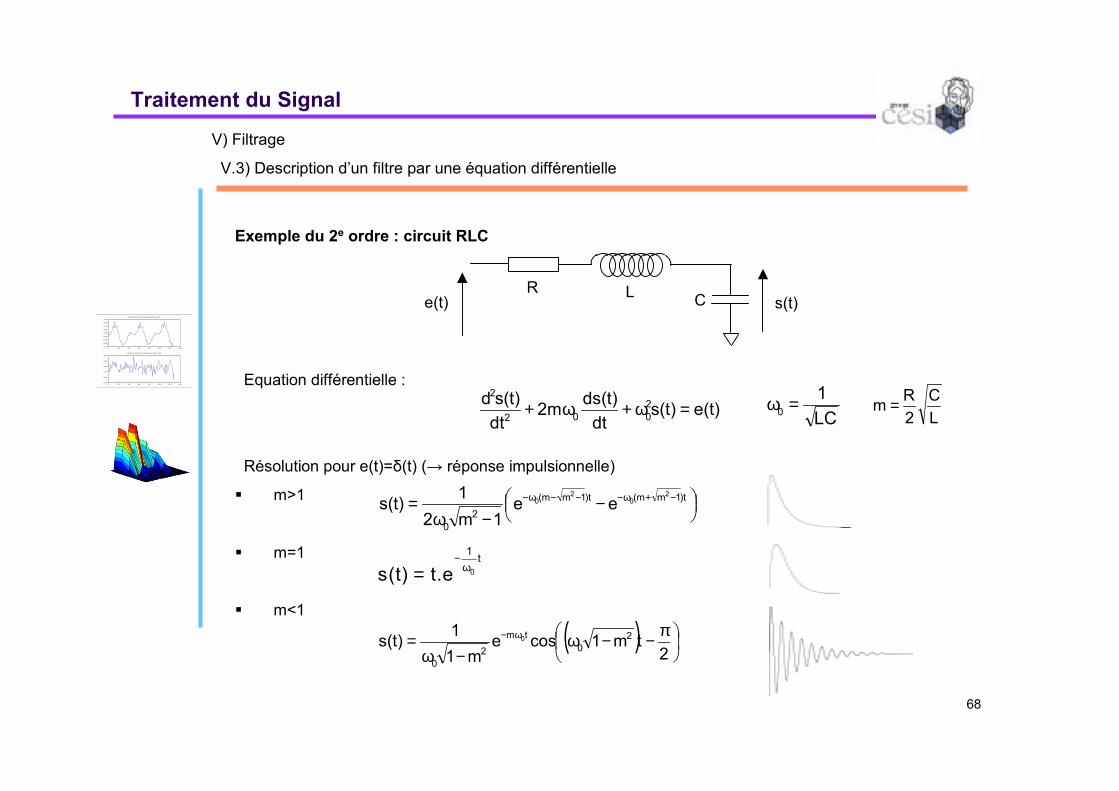
Exemple du 2e ordre : circuit RLC
Equation différentielle :
Résolution pour e(t)=δ(t) (→ réponse impulsionnelle)
! m>1
! m=1
! m<1
e(t) s(t)R
C
)t(e)t(sdt
)t(dsm2dt
)t(sd 2002
2
=ω+ω+ LC1
0 =ωLC
2Rm =
( )
π−−ω
−ω= ω−
2tm1cose
m11)t(s 2
0tm
20
0
t1
0e.t)t(s ω−
=
−
−ω= −+ω−−−ω− t)1mm(t)1mm(
20
20
20 ee
1m21)t(s
L

69
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.4) Fonction de transfert
Fonction de transfert (ou transmittance) de Laplace
Permet de connaître la réponse du filtre à n�importe quel signal d�entrée
Fonction de transfert harmonique
↔ Régime sinusoïdal (ou régime harmonique)
Permet de connaître la réponse en fréquence
Gain en décibel (dB) et phase
Remarque : représente un gain sans unité, ou gain en amplitude
Rappels : module et phase d�un complexe
)p(E)p(S)p(H =
)j(H)p(H jp ω →← ω=
)j(Hlog20)(G ω=ω )j(Garg)( ω=ωϕ
jbaz += 22 baz +=
==ϕ
abarctg)zarg()z(
)j(H ω

70
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.4) Fonction de transfert
Fonction de transfert harmonique (suite)
Représentation graphique : diagramme de Bode
Axe des abscisses logarithmique
la longueur d�une décade est constante
Avantages
1) Précision sur les petites valeurs du gain
2) Mise en série de fonctions de transferts élémentaires
Les courbes de gain et de phase s�ajoutent (et notamment les pentes des variations)
)j(E)j(S)j(H
ωω=ω
n21 H....HHH ×××= )H....HHlog(20Hlog20 n21 ×××= n21 Hlog20....Hlog20Hlog20 +++=
12 f10f = )f10(logflog 110210 = )f(log10logflog 11010210 += )f(log1flog 110210 +=
H1 H2 Hn
)H....HHarg(Harg n21 ×××= n21 Harg....HargHarg +++=

71
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.4) Fonction de transfert
Fonction de transfert harmonique (suite)
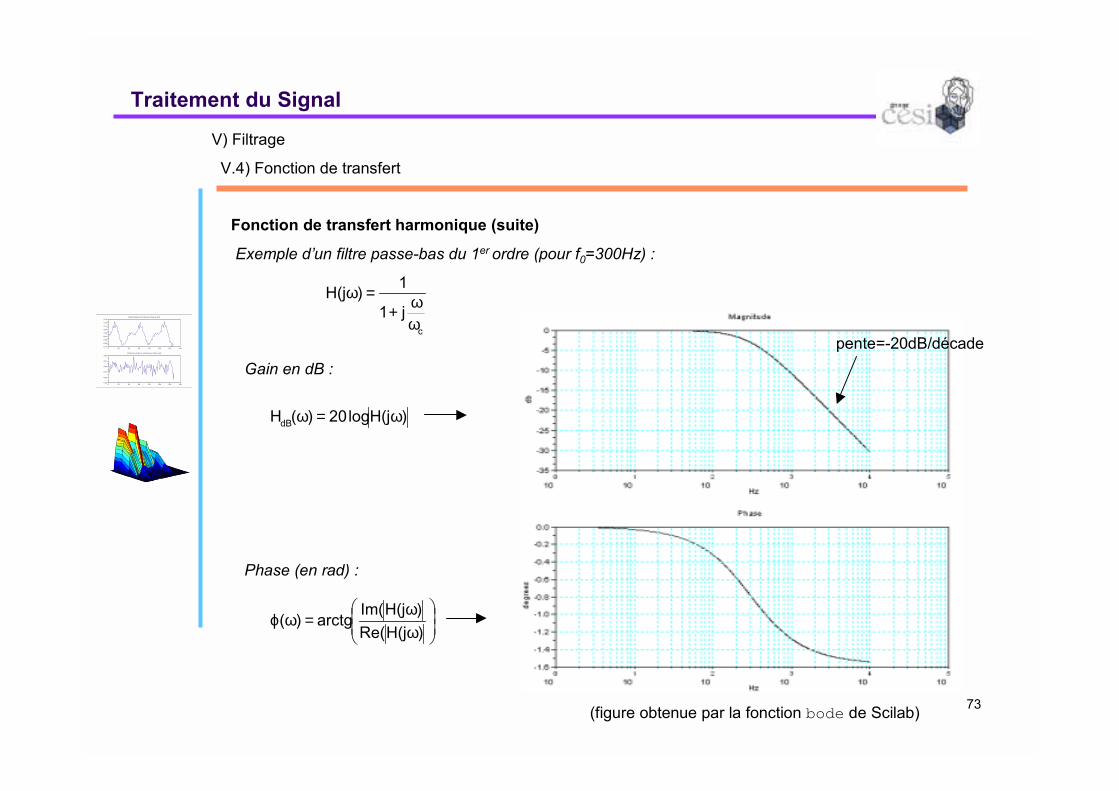
Exemple d�un filtre passe-bas du 1er ordre
Gain en amplitude (sans unité) :
Gain en décibels (dB) :
Phase :
c
j1
1)j(E)j(S)j(H
ωω+
=ωω=ω
2
c
1
1)j(H
ωω+
=ω
( )
ωω+−=
ωω+−=
ωω+
=
ωω
=ω=ωϕcc
c
j1arctgj1arctg)1(arctgj1
1arctg)j(HRe()j(HIm(
arctg)j(Harg)(
ωω+−=
ωω+−=
ωω+
=ω=ω2
c10
2
c10102
c
1010dB 1log101log20)1(log20
1
1log20)j(Hlog20)(H
72
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.4) Fonction de transfert
Fonction de transfert harmonique (suite)
Fréquences de coupure
Diminution de la puissance de moitié
↔ diminution du gain en dB de 3
↔ multiplication du gain en amplitude (=|H(jω)|) par (≈0,7)
Démonstration :
↔
↔
↔
2/1
3)j(Hlog20)(G −=ω=ω
3)j(Hlog20 −=ω
203)j(Hlog −=ω
21
10
110)j(H203
203
===ω−
73
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.4) Fonction de transfert
Fonction de transfert harmonique (suite)
Exemple d�un filtre passe-bas du 1er ordre (pour f0=300Hz) :
Gain en dB :
Phase (en rad) :
(figure obtenue par la fonction bode de Scilab)
c
j1
1)j(H
ωω+
=ω
)j(Hlog20)(HdB ω=ω
ωω
=ωϕ)j(HRe()j(HIm(
arctg)(
pente=-20dB/décade
74
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.4) Fonction de transfert
Fonction de transfert harmonique (suite)
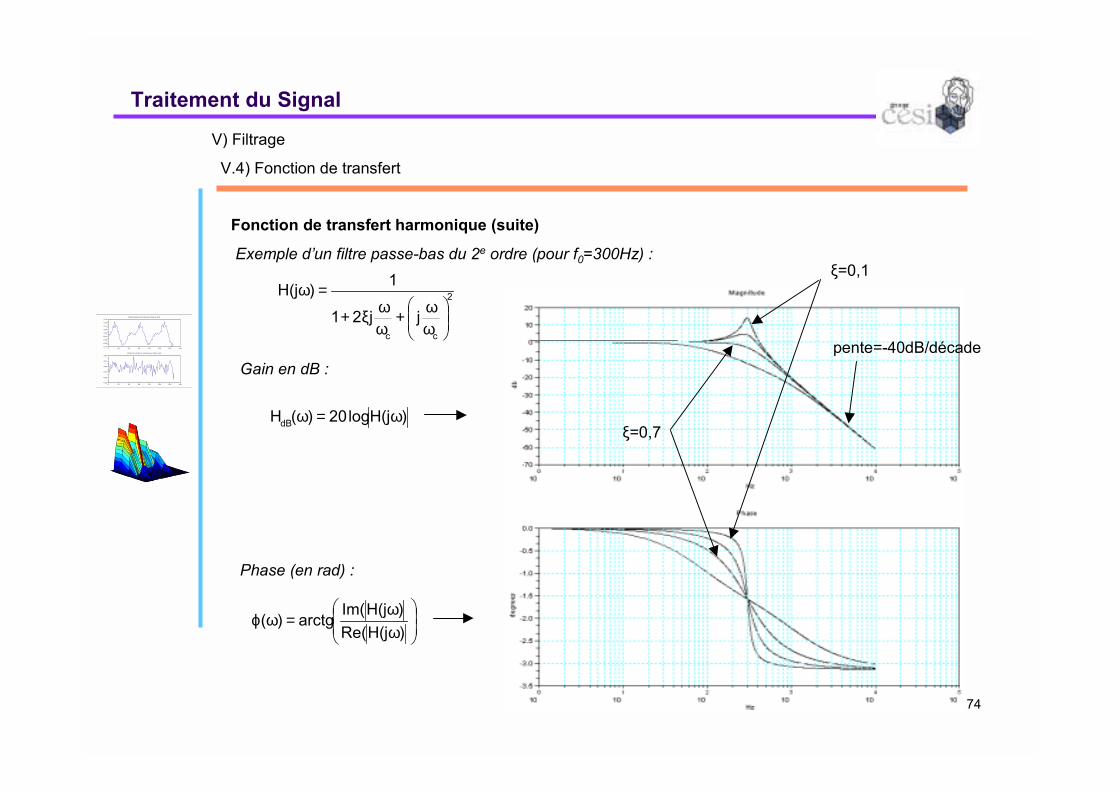
Exemple d�un filtre passe-bas du 2e ordre (pour f0=300Hz) :
Gain en dB :
Phase (en rad) :
ξ=0,1
ξ=0,7
pente=-40dB/décade
2
cc
jj21
1)j(H
ωω+
ωωξ+
=ω
)j(Hlog20)(HdB ω=ω
ωω
=ωϕ)j(HRe()j(HIm(
arctg)(
75
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.4) Fonction de transfert
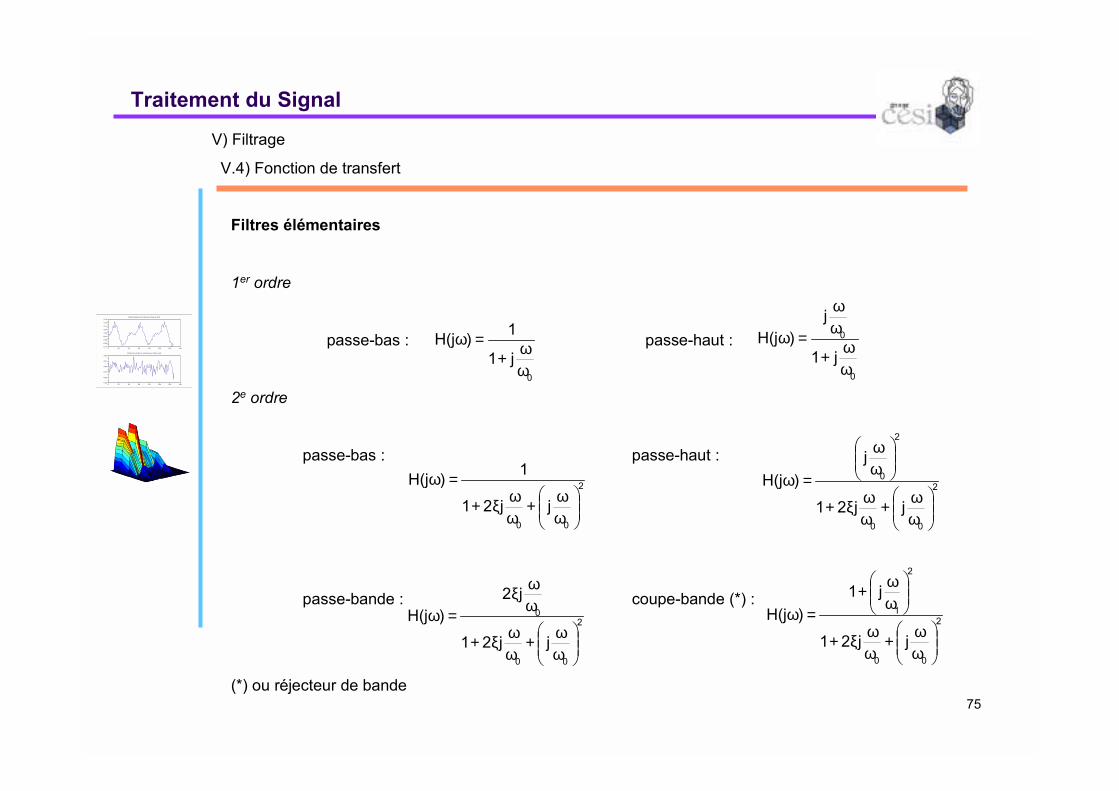
Filtres élémentaires
1er ordre
passe-bas : passe-haut :
2e ordre
passe-bas : passe-haut :
passe-bande : coupe-bande (*) :
(*) ou réjecteur de bande
0
j1
1)j(H
ωω+
=ω
0
0
j1
j)j(H
ωω+
ωω
=ω
2
00
jj21
1)j(H
ωω+
ωωξ+
=ω
2
00
0
jj21
j2)j(H
ωω+
ωωξ+
ωωξ
=ω
2
00
2
0
jj21
j)j(H
ωω+
ωωξ+
ωω
=ω
2
00
2
1
jj21
j1)j(H
ωω+
ωωξ+
ωω+
=ω

76
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
Décomposition des fonctions de transfert
Décomposition sous forme de produit
Une fonction de transfert d�ordre n quelconque peut se décomposer en un produit de fonctions de transfert élémentaires d�ordres 1 et 2 (les ordres s�ajoutent).
Exemple : ordre 5
→ importance de l�étude des filtres d�ordre 1 et 2
On utilise cette décomposition pour obtenir le diagramme de Bode de la fonction de transfert harmonique (en jω).
2 2 15
V) Filtrage
V.4) Fonction de transfert
=

77
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
Décomposition des fonctions de transfert (suite)
Décomposition sous forme de somme (=en éléments simples)
avec
ou
(pi : pôles simples) (pi : pôles multiples, d�ordre q)
Cette décomposition correspond à des blocs élémentaires disposés en parallèle.
On utilise cette décomposition pour déterminer la réponse du système à un signal d�entrée quelconque(permet d�utiliser des transformées connues, à partir de la table des transformées).
1
1
1
3
012
21n
1nn apapapap
k)p(H++++
= −− ( ) ( ) ( )n
n
2
2
1
1
ppA...
ppA
ppA
−++
−+
−=
( )[ ]ippii pp)p(FA =−=
V) Filtrage
V.4) Fonction de transfert
=
ipp1q
qi
1q
1q,i dp))pp)(p(F(d
)!1q(1A
=−
−
−
−−
=
78
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
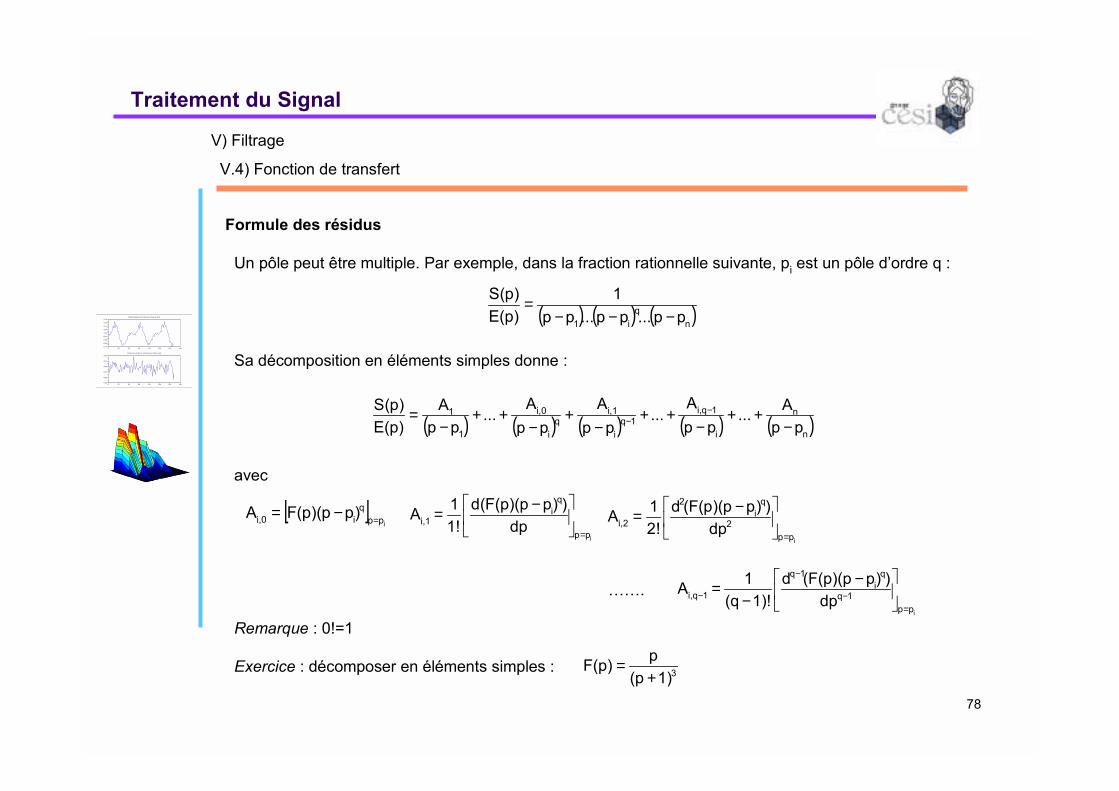
Formule des résidus
Un pôle peut être multiple. Par exemple, dans la fraction rationnelle suivante, pi est un pôle d�ordre q :
Sa décomposition en éléments simples donne :
avec
��.
Remarque : 0!=1
Exercice : décomposer en éléments simples :
( ) ( ) ( )nq
i1 pp...pp...pp1
)p(E)p(S
−−−=
( ) ( ) ( ) ( ) ( )n
n
i
1q,i1q
i
1,iq
i
0,i
1
1
ppA...
ppA
...pp
App
A...
ppA
)p(E)p(S
−++
−++
−+
−++
−= −
−
[ ]ipp
qi0,i )pp)(p(FA =−=
ipp
qi
1,i dp))pp)(p(F(d
!11A
=
−=ipp
2
qi
2
2,i dp))pp)(p(F(d
!21A
=
−=
ipp1q
qi
1q
1q,i dp))pp)(p(F(d
)!1q(1A
=−
−
−
−−
=
3)1p(p)p(F+
=
V) Filtrage
V.4) Fonction de transfert

79
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.4) Fonction de transfert
Exercice
Soit une fraction rationnelle définie par :
1) Déterminer sa transformée de Laplace inverse (en la décomposant préalablement en fonctions de transfert élémentaires)
2) En déduire la réponse impulsionnelle d�un système possédant F(p) pour transmittance.
3) Calculer la réponse de ce système à un signal échelon u(t), de 2 manières différentes :
- transformée de Laplace inverse
- produit de convolution avec réponse impulsionnelle
Représenter graphiquement cette réponse.
4) Représenter le diagramme de Bode de la fonction de transfert harmonique correspondant à F(p).
2p3p1)p(F 2 ++
=

80
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
Exemple de programmation avec Scilab
Exemple
num=1;den=poly([1 2.61 3.41 2.61 1], "s", "coef");sys=syslin('c', num, den)bode(sys, 0.0001, 0.3);
1p61,2p41,3p61,2p1)p(H 234 ++++
=
V) Filtrage
V.4) Fonction de transfert

81
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
Autre exemple de programmation avec Scilab
Autre exemple
f=[0:1:10000]; f0=300;w=2*%pi*f;w0=2*%pi*f0;xi=0.1; den=(1+2*xi*%i*w/w0-(w/w0)^2);H=1../den; PhaseH=-atan(imag(den),real(den));GainHdB=20*log10(abs(H)); xbascbode(f+1,GainHdB,PhaseH);
V) Filtrage
V.4) Fonction de transfert
2
cc
jj21
1)j(H
ωω+
ωωξ+
=ω

82
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
Autres filtres
Filtres de Butterworth
Ils sont définis par la fonction de transfert :
N ordre du filtre
Caractéristiques
� Pente de la décroissance du gain : N×20 dB/décade. � Valeur du gain de ce filtre à la fréquence de coupure : �3dB (quel que soit l�ordre N).
N2
c
2
1
1)(H
ωω+
=ω
V) Filtrage
V.4) Fonction de transfert

83
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
Stabilité
Condition par rapport aux pôles
Un système est stable si tous les pôles de sa fonction de transfert sont situés dans le demi-plan situé àgauche de l�axe imaginaire du plan de la variable p :
plan p
Explication
Pôle réel p0 :
Pôles complexes conjugués p1,2=α+jβ :
Condition par rapport à la réponse impulsionnelle
Soit h(t) la réponse impulsionnelle d�un système. Ce système est stable si : ∫+∞
−∞=∞<
tdt)t(h
V) Filtrage
V.4) Fonction de transfert
tpL
0
0Ae)t(hpp
A)p(H =→←−
=
)tsin(.eA)t(h)pp)(pp(
A)p(H tL
21
ωω=→←−−
= α
risque d�instabilité

84
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.5) Convolution
Définition du produit de convolution
Définition générale (domaine continu)
Cas des signaux physiques ( ↔ causaux)
Domaine discret
Convolution avec réponse impulsionnelle h(t)
La convolution avec la réponse impulsionnelle permet de connaître la réponse du système à un signal quelconque e(t).
Rappel : la réponse impulsionnelle peut être connue à partir de l�équation différentielle, par le biais de la fonction de transfert de Laplace :
ττ−τ== ∫+∞
∞−d).t(e).(e)t(e*)t(e)t(s 2121
ττ−τ= ∫ d).t(e).(e)t(st
0 21
∑−
=−==
1N
0iiikkkk h.eh*es +∞= ,...,0k
∫ τττ−==t
0
d)(e)t(h)t)(h*e()t(s
85
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.5) Convolution
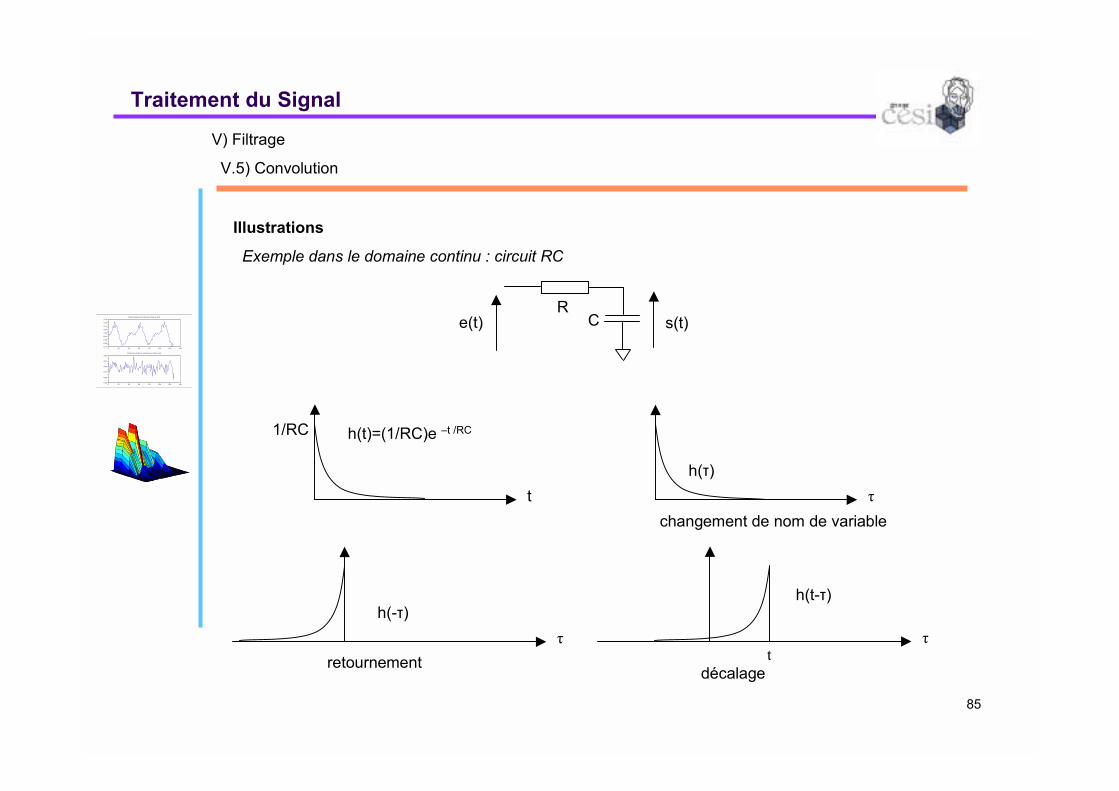
Illustrations
Exemple dans le domaine continu : circuit RC
e(t) s(t)
1/RC
t
h(t)=(1/RC)e �t /RC
RC
τh(τ)
τh(-τ)
τ
h(t-τ)
t
changement de nom de variable
retournementdécalage
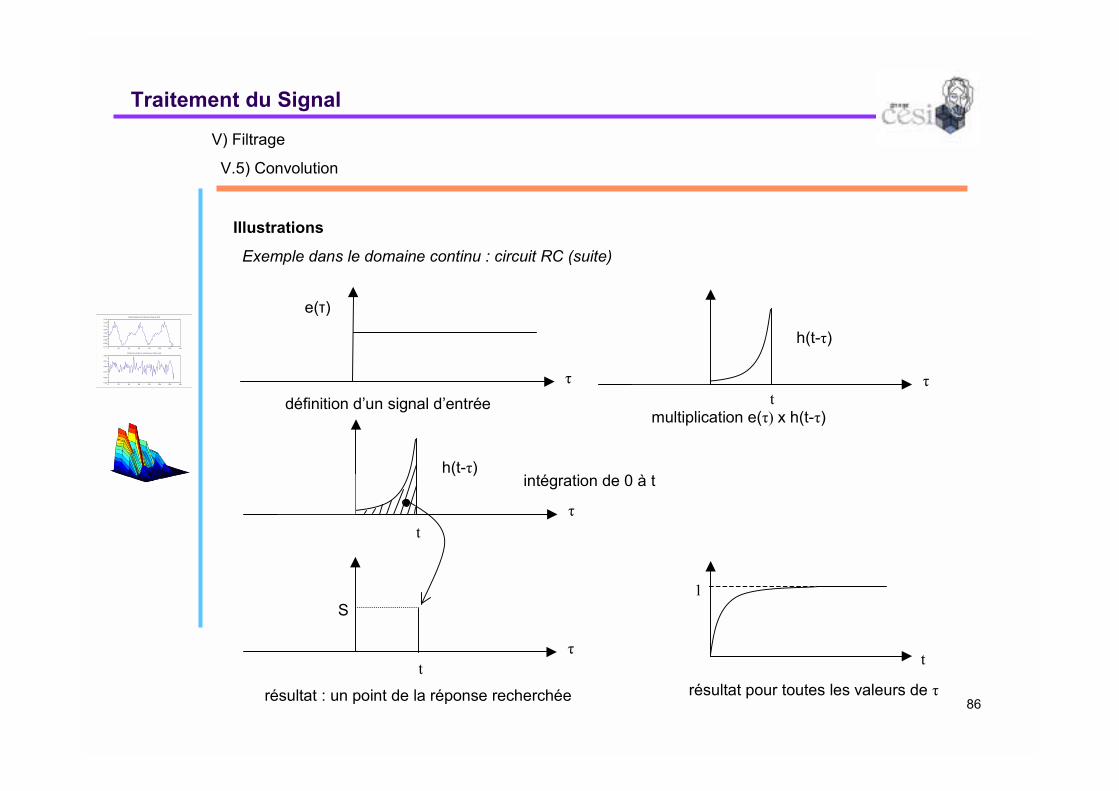
86
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.5) Convolution
Illustrations
Exemple dans le domaine continu : circuit RC (suite)
τ
e(τ)
définition d�un signal d�entréeτ
h(t-τ)
tmultiplication e(τ) x h(t-τ)
τ
h(t-τ)
τ
t
t
S
résultat : un point de la réponse recherchée
1
t
résultat pour toutes les valeurs de τ
intégration de 0 à t

87
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.5) Convolution
Illustrations
Exemple dans le domaine discret (suite)
avec e un signal échantillonné défini par (M=10) :
et h un autre signal (représentant la réponseimpulsionnelle d�un filtre) défini par (N=2) :
Résultat de la convolution entre ces 2 signaux :
Dans cet exemple, la convolution permet une détection des bords de l�impulsion présente dans le signal long.
Exercice
Donner l�expression de s3 (et vérifier sa valeur).
1M,...,1,0k −=
∫ τττ−==t
0
d)(e)t(h)t)(h*e()t(s
1110)1(ehehehs 3021i
3
2ii33 =×+×−=+==∑
=−
i
k
1Nkiikkkk ehe*hs ∑
+−=−==
Rappel, cas continu :
0001111000
0001111000
00-10001000
-11
1-1.x
=

88
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.5) Convolution
Illustrations
Exemples dans le domaine discret, à 2 dimensions (traitement d�images)
(en supposant que le point central de h a pour coordonnées (0,0) et que les indices des ordonnées sont croissantes du haut vers le bas) ; M taille de l�image et N taille du filtre
Les ? Peuvent prendre des valeurs différentes selon la manière dont sont gérés les effets de bord.
Remarque : en général, N est pris impair, donc N/2 doit être considéré comme la division entière.
Exercice
Calculer explicitement s2,2 , et compléter l�image résultat.
* =
∑ ∑−= −=
++==2/N
2/Nj
2/N
2/Nij,iyj,xiy,xy,xy,x h.eh*es 1M,...,1,0y,x −=
111111111111
0-2-20??03300-3-30??02200-2-20??01100-1-10???????????
-101-101-101
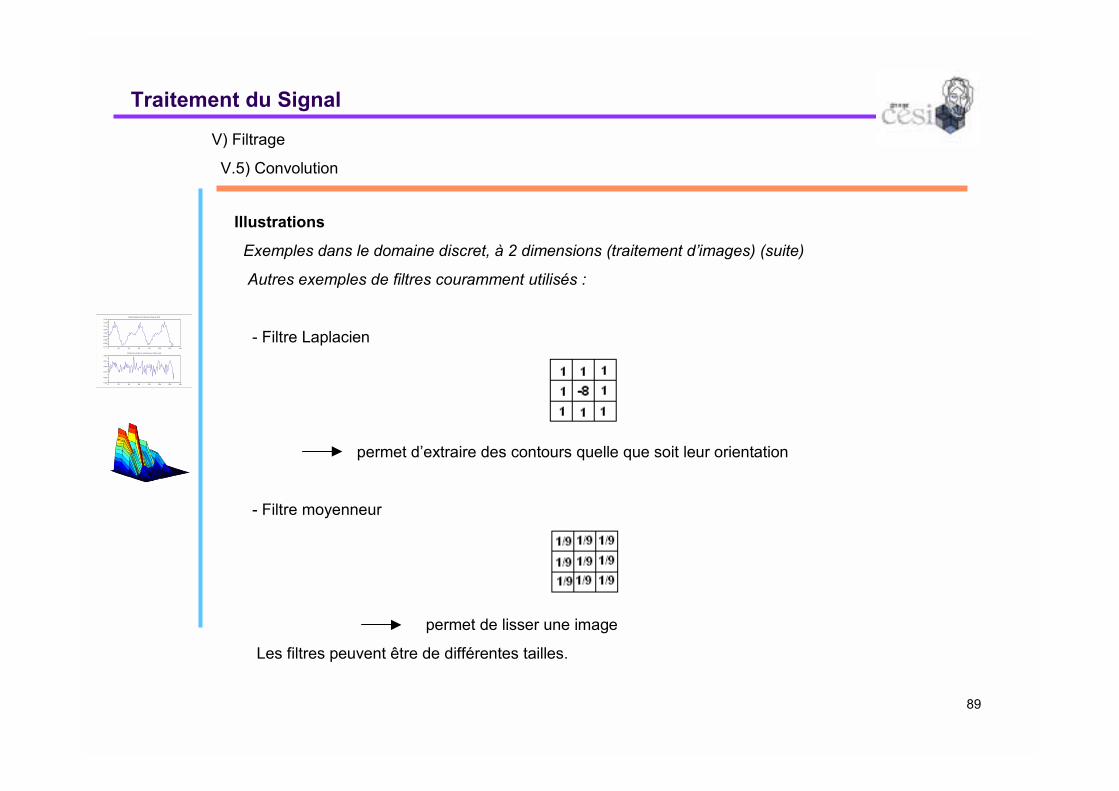
89
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.5) Convolution
Illustrations
Exemples dans le domaine discret, à 2 dimensions (traitement d�images) (suite)
Autres exemples de filtres couramment utilisés :
- Filtre Laplacien
permet d�extraire des contours quelle que soit leur orientation
- Filtre moyenneur
permet de lisser une image
Les filtres peuvent être de différentes tailles.

90
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.5) Convolution
Illustrations
Exemples dans le domaine discret, à 2 dimensions (traitement d�images) (suite)
Remarque
L�opération de convolution peut être très coûteuse en terme de temps de traitement. On peut alorstirer partie de :
- La propriété suivante de la Transformée de Fourier :
- L�existence de l�algorithme de Transformée de Fourier Rapide (TFR, ou FFT).
Le principe est alors le suivant :
)f(Y).f(X)t(y*)t(x F→
)x,x(2image)f,f(2IMAGE)f,f(FILTRE).f,f(1IMAGE)x,x(filtre*)x,x(1image 21TF
212121TF
2121
1
→=→−
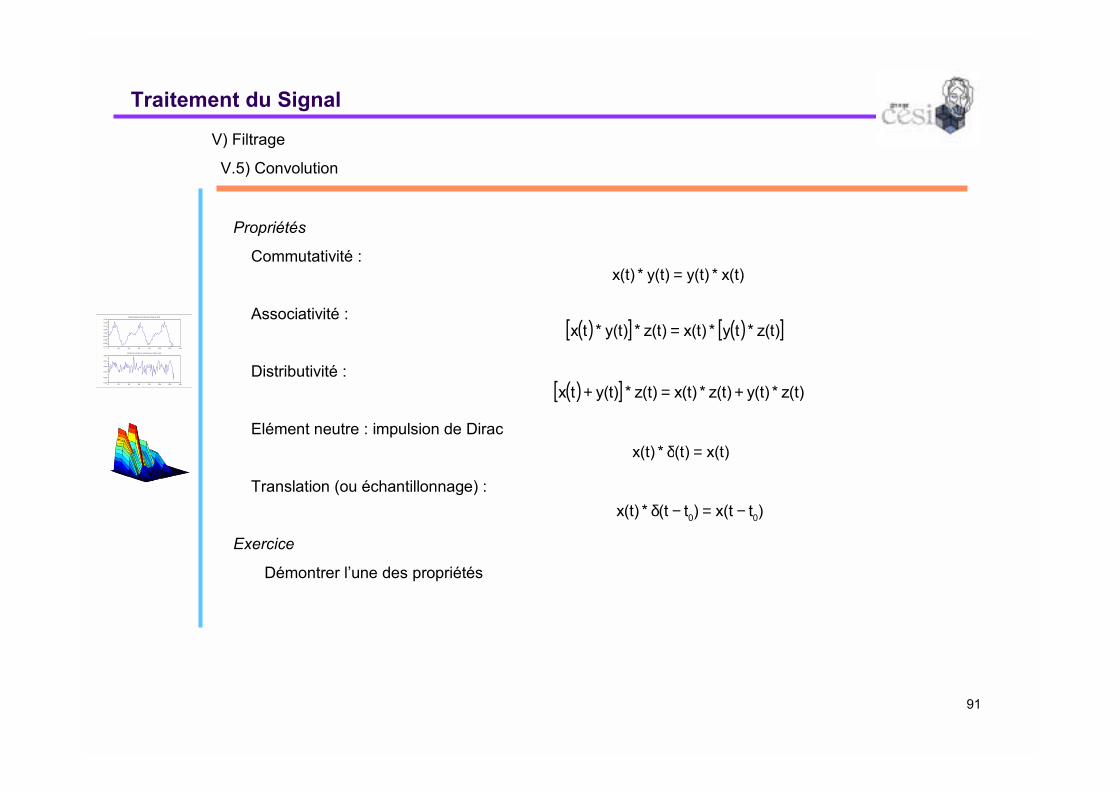
91
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
V) Filtrage
V.5) Convolution
Propriétés
Commutativité :
Associativité :
Distributivité :
Elément neutre : impulsion de Dirac
Translation (ou échantillonnage) :
Exercice
Démontrer l�une des propriétés
)t(x*)t(y)t(y*)t(x =
( )[ ] ( )[ ])t(z*ty*)t(x)t(z*)t(y*tx =
( )[ ] )t(z*)t(y)t(z*)t(x)t(z*)t(ytx +=+
)t(x)t(*)t(x =δ
)tt(x)tt(*)t(x 00 −=−δ

92
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
Intérêt
Pouvoir réaliser des filtres avec des systèmes numériques (ordinateur standard, DSP, circuit intégrépersonnalisé�).
Représentation
Correspond à un système linéaire dont les signaux d�entrée et de sortie sont échantillonnés :
La référence au temps peut être omise :
n est l�indice de l�échantillon courant du temps discrétisé (le système est considéré comme "temps-réel" : à chaque nouvel instant n, un échantillon e(n) entre et un échantillon s(n) sort.
Equation aux différences
Concrètement, un filtrage numérique consiste à calculer un terme de la forme :
Ce sont les coefficients ai et bi qui déterminent les caractéristiques du filtre (type, fréquences de coupure, etc).
Cette équation est appelée équation aux différences.
)Qn(sb...)2n(sb)1n(sb)Pn(ea...)1n(ea)n(ea)n(s Q21P10 −++−+−+−++−+=
V) FiltrageV.6) Filtrage numérique
V.6.1) Introduction

93
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Réalisation pratique
Pour pouvoir calculer cette équation dans un système temps réel, le bloc du schéma précédent doit comporter de la mémoire pour les échantillons e(n-i) et s(n-i) :
Traitement du Signal
2 types de filtres numériques
� RIF : à réponse impulsionnelle finie ;ne comportent que les termes en e(n-i) ;permettent d�obtenir des filtres à partir d�une réponse en fréquence idéale ;les coefficients ai sont les échantillons de la réponse impulsionnelle (ils sont souvent notés hi)
� RII : à réponse impulsionnelle infinie ;comportent des termes en e(n-i) et des termes en s(n-i) ;permettent de synthétiser des filtres à partir des caractéristiques de filtres analogiques.
V) FiltrageV.6) Filtrage numérique
V.6.1) Introduction
94
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
Pourquoi "Réponse Impulsionnelle Finie" et "Réponse Impulsionnelle Infinie" ?
)1n(ks)n(e)n(s −+=
Prenons l�exemple du filtre d�équation de récurrence :
Appliquons lui une impulsion de Kronecker (δk={1,0,0,0,�.}, équivalent de l�impulsion de Dirac du domaine continu).
- si k>1, le signal de sortie s(n) peut diverger vers des valeurs
- si k=1, s(n) garde une valeur constante
- si k<1, s(n) tend vers 0 quand n
Réponse "intuitive" :
∞→
∞
Comment obtenir l�équation aux différences, à partir du filtre recherché ?
on utilise la transformée en Z
V) FiltrageV.6) Filtrage numérique
V.6.1) Introduction

95
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Définition
TZ d�un signal numérique s(n) :
Traitement du Signal
∑∞
=
−=0n
nz)n(s)z(S
V) FiltrageV.6) Filtrage numérique
V.6.2) La transformée en Z, outil d�étude des systèmes échantillonnés
Propriétés élémentaires
Linéarité
)z(Sa)z(Sa)n(sa)n(sa 2211Z
2211 +→←+
Retard temporel
)z(Sz)nn(s 0nZ0
−→←− )p(Se)tt(s ptL0
0−→←−
)p(S.a)p(S.a)t(s.a)t(s.a 2211L
2211 +→←+
Rappel T. Laplace
Transformées élémentaires
Impulsion
Il s�agit ici de l�impulsion de Kronecker, définie par δk={1,0,0,�} :
Signal exponentiel
1Zk →←δ
aTaT1ZanT
ezz
ez11)z(Se)nT(s −−−
−
−=
−=→←=

96
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Rappel : suites géométriques
avec r :raison
Somme des N+1 premiers termes :
Somme de tous les termes :
Exemple
Traitement du SignalV) Filtrage
V.6) Filtrage numériqueV.6.2) La transformée en Z, outil d�étude des systèmes échantillonnés
∑∞
=∞ =+++=
0nn210 u...uuuS
n1n u.ru =+
r1r1uS
1N
0N −−=
+
r1r1limuS
1n
n0 −
−=+
∞→∞
∑∞
=∞ =++++=
0n
n321 5,0...5,05,05,01S
5,0u5,05,05,0u nn1n
1n ×=×== ++
5,15,075,0
5,0125,01
5,015,011
r1r1uS
22
02 ==−−=
−−×=
−−=
25,0
15,015,01lim
r1r1limuS
n
n
n
n0 ==
−−=
−−=
∞→∞→∞
97
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Lien avec la Transformée de Laplace
La TZ est la TL d�un signal échantillonné, en posant :
Démonstration
Traitement du SignalV) Filtrage
V.6) Filtrage numériqueV.6.2) La transformée en Z, outil d�étude des systèmes échantillonnés
{ } ∫+∞ −==0
ptdte)t(s)p(S)t(sL
pTeez =
1)t( L→←δ
ptL0
0e)tt( −→←−δ
∑∑∑∞
=
−+∞
−∞=
+∞
−∞=
=→←−δ=−δ×=0n
pnTee
L
nee
nee
ee)nT(s)p(S)nTt()nT(s)nTt()t(s)t(s
Soit s(t) un signal et se(t) sa version échantillonnée :
pTeez = ∑∞
=
−=0n
ne z)nT(s)z(S

98
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
Fonction de transfert en Z et réponse impulsionnelle
)z(E)z(S)z(H =
1)z(E)nT(e Zk =→δ= )z(S
1)z(S)z(H ==
{ })n(hZz)n(h)z(H0n
n ==∑∞
=
−
la fonction de transfert est la TZ de la réponse impulsionnelle (idem Laplace)
V) FiltrageV.6) Filtrage numérique
V.6.2) La transformée en Z, outil d�étude des systèmes échantillonnés
99
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
De la fonction de transfert en z à l�équation aux différences
Forme générale de la fonction de transfert en z du filtre numérique :
Traitement du Signal
∑
∑
=
−
=
−
−−−
−−−
−=
−−−−++++== Q
1q
P
0p
pp
22
11
PP
22
110
z.b1
za
zb...zbzb1za...zazaa
)z(E)z(S)z(H
E(z) et S(z) représentent respectivement les transformées en z des échantillons d�entrée e(n)
(avec n correspond à nTe) et de sortie s(n) courants :
E(z)=Z{e(n)} S(z)=Z{s(n)}
(propriétés de retard temporel
et de linéarité)
)Qn(sb...)2n(sb)1n(sb)Pn(ea...)2n(ea)1n(ea)n(ea)n(s Q21P210 −++−+−+−++−+−+=
� Z{e(n-n0)}=z-n0 E(z)
� Z{aea(n)+beb(n)}=aEa(z)+bEb(z)
V) FiltrageV.6) Filtrage numérique
V.6.2) La transformée en Z, outil d�étude des systèmes échantillonnés

100
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
Fonction de transfert de Laplace
Fonction de transfert en Z
Equation aux différences
221
2210
p'bp'b1p'ap'a'a
)p(X)p(Y)p(H
−−++==
22
11
22
110
zbzb1zazaa
)z(X)z(Y)z(H −−
−−
−−++==
)2n(sb)1n(sb)2n(ea)1n(ea)n(ea)n(s 21210 −+−+−+−+=
z1z1
T2p
e +−→
[ ] )z(Ez)nn(eZ 0n0
−=−
Synthèse des filtres RII par Transformée bilinéaire (exemple pour l�ordre 2)
Fondement théorique : équivalence de l�intégration
2)1n(x)n(xT)1n(y)n(ydt).t(x)t(y e
t
0
−++−=→= ∫
transformée bilinéaire
V) FiltrageV.6) Filtrage numérique
V.6.3) Synthèse des filtres
Objectif
Déterminer les coefficients ai et bi des filtres RII et les coefficients ai des filtres RIF, à partir de caractéristiques souhaitées (type des filtres, ordre, etc).
101
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
Relations obtenues par application de la transformée bilinéaire :
Exemple : Filtre passe-bas d�ordre 2
2
00
jj21
1)j(H
ωω+
ωωξ+
=ω
10 k
1a = 01
1 a2k2a == 0
12 a
k1a == ( )2
11 k1
k2b −= ( )2
12 kk21
k1b +ξ−=
avec : 21 kk21k +ξ+=
c
e
ffkπ
=
Exemple d�application numérique
fc=500Hz ; ξ=0,1 ; fe=44100Hz a0=0,00126 a1=2 a2=1 b1=-1,98084 b2=0,98587
V) FiltrageV.6) Filtrage numérique
V.6.3) Synthèse des filtres
)2n(sb)1n(sb)2n(ea)1n(ea)n(ea)n(s 21210 −+−+−+−+=
)2n(s98587,0)1n(s98084,1)2n(e)1n(e2)n(e00126,0 −+−−−+−+=

102
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
les coefficients d�un filtre RIF peuvent s�obtenir par TFD-1
Principe
2 propriétés importantes :
1)
2)
)f(H)t(h F→
∑=
−=N
0i
)in(e)n(h)n(s
h(t) réponse impulsionnelle|H(f)| réponse en fréquence (=module de la FT harmonique)
h(n) coefficients du filtre (qui en contient N)
V) FiltrageV.6) Filtrage numérique
V.6.3) Synthèse des filtres
Synthèse des filtres RIF par développement en série de Fourier de la réponse fréquentielle
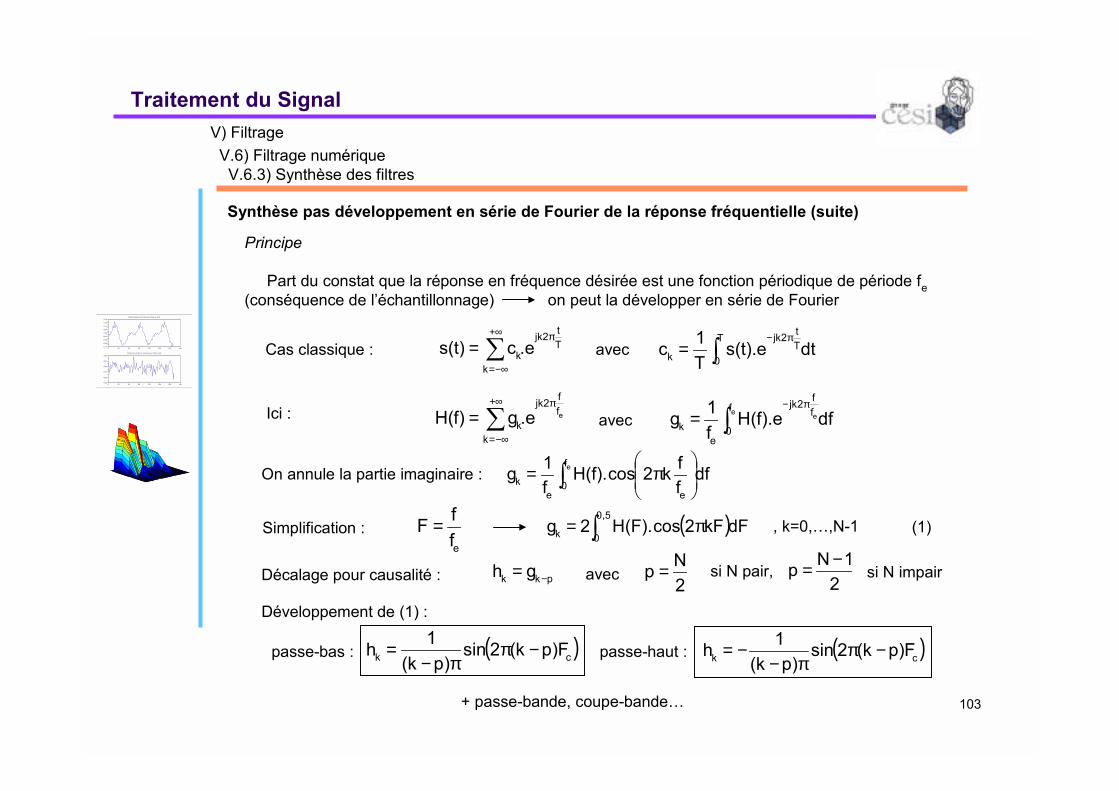
103
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
Principe
Part du constat que la réponse en fréquence désirée est une fonction périodique de période fe(conséquence de l�échantillonnage) on peut la développer en série de Fourier
∑+∞
−∞=
π=
k
Tt2jk
k e.c)t(s avec ∫π−
=T
0Tt2jk
k dte).t(sT1cCas classique :
Ici : ∑+∞
−∞=
π
=k
ff2jk
kee.g)f(H avec ∫
π−
= e ef
0
ff2jk
ek dfe).f(H
f1g
∫
π= ef
0ee
k dfffk2cos).f(H
f1gOn annule la partie imaginaire :
passe-bas : passe-haut :
( )∫ π=5,0
0k dFkF2cos).F(H2gSimplification :effF =
Décalage pour causalité : pkk gh −= avec 2Np = si N pair,
21Np −= si N impair
(1)
Développement de (1) :
, k=0,�,N-1
( )ck F)pk(2sin)pk(
1h −ππ−
= ( )ck F)pk(2sin)pk(
1h −ππ−
−=
+ passe-bande, coupe-bande�
V) FiltrageV.6) Filtrage numérique
V.6.3) Synthèse des filtres
Synthèse pas développement en série de Fourier de la réponse fréquentielle (suite)

104
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
Algorithme du cas passe-bas
Lire la valeur de N (nombre de coefficients du filtre)Si N pair
p=N/2sinon
p=(N-1)/2Lire la valeur de la fréquence de coupure normalisée FcPour k variant de 0 à N-1 //calcul des coefficients h(i) du filtre
Si k!=ph(k+1)=sin(2*pi*(k-p)*Fc)/((k-p)*pi); //k-p pour le décalage
sinonh(k+1)=2*Fc; //sinus(x)/x pour x=0 traité à part
Diviser les coefficients h(i) par leur somme
N=10if modulo(N,2)==0 //si N pair
p=N/2;else
p=(N-1)/2; //si N impairendFc=0.01for k=0:N-1
if k~=ph(k+1)=1/(k-p)/%pi*sin(2*Fc*(k-p)*%pi);
elseh(k+1)=2*Fc; //cas sin(x)/x pour x=0 traité à part
endendsomme=sum(h);h=h/somme //division des coefficients par leur somme
Programme Scilab correspondant
V) FiltrageV.6) Filtrage numérique
V.6.3) Synthèse des filtres
Synthèse pas développement en série de Fourier de la réponse fréquentielle (suite)

105
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
fréquence de coupure relative : Fc=0,01
( )ππ
= k02,0sink1gkpasse-bas , k=-5,�,5
pkk gh −=et
, k=0,�,9( )π−π−
= )5k(02,0sin)5k(
1hk
52Np ==avec
Exemple : Réalisation d�un filtre passe-bas avec fe=44100Hz, fc=4410Hz et N=10
h0= 0.0989147h1= 0.0995054 = h9h2= 0.0999662 = h8h3= 0.1002962 = h7h4= 0.1004945 = h6h5= 0.1005607
Résultats obtenus :
V) FiltrageV.6) Filtrage numérique
V.6.3) Synthèse des filtres
Synthèse pas développement en série de Fourier de la réponse fréquentielle (suite)

106
0 20 40 60 80 100 120 140-0.13
-0.09
-0.05
-0.01
0.03
0.07
0.11
0.15
0.19Partie voisée du mot six (au mil ieu du mot)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0.00
0.01
0.02Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
Filtres RII
Avantages- peu de coefficients donc calcul rapide- modélisation des filtres analogiques (et notamment possibilité d�obtenir des résonances)
Inconvénients- risque d�instabilité surtout pour les grands facteurs de qualité- les coefficients doivent être codés avec beaucoup de précision (conséquence du risque d�instabilité)- phase non-linéaire (se traduit par une déformation du signal). Rm : le temps de propagation de groupe
est défini par :
Il correspond au temps de transfert de l�énergie du signal d�entrée vers sa sortie. Il doit être constantsinon le signal subit une déformation par le filtre.
Filtres RIF
Avantages- pas de risque d�instabilité- phase linéaire- permet de synthétiser n�importe quelle fonction de transfert (sauf résonances)
Inconvénients- nombreux coefficients surtout pour les pentes raides et les bandes passantes étroites
ωϕ=
ddtg
V) FiltrageV.6) Filtrage numérique
V.6.4) Comparaison des filtres RII et RIF


















