
PHYSIQUE - Ecole Préparatoire en Sciences et...
277
République Algérienne Démocratique et Populaire Ministère de l’Enseignement Supérieur et de La Recherche Scientifique Ecole Préparatoire en Sciences et Techniques de Tlemcen PHYSIQUE VIBRATIONS Cours et problèmes résolus Classes préparatoires en sciences et techniques Présenté par Dr Fouad BOUKLI HACENE Dr Mohamed MEBROUKI Année Universitaire : 2015-2016 Deuxième édition
Transcript of PHYSIQUE - Ecole Préparatoire en Sciences et...
République Algérienne Démocratique et Populaire
Ministère de l’Enseignement Supérieur et de La Recherche Scientifique
Ecole Préparatoire en Sciences et
Techniques de Tlemcen
PHYSIQUE VIBRATIONS
Cours et problèmes résolus Classes préparatoires en sciences et techniques
Présenté par Dr Fouad BOUKLI HACENE
Dr Mohamed MEBROUKI
Année Universitaire : 2015-2016
Deuxième édition
Avant propos
Ce document est destiné aux étudiants de la deuxième année des filières
scientifiques et techniques des universités et des écoles d’ingénieurs d’Algérie. Il
répond au programme officiel du module « Vibrations» enseignés en deuxième année
des filières Sciences et techniques et Sciences de la matière.
Ce manuel contient une série de problèmes liés aux phénomènes de vibrations
avec un rappel de cours.
Le manuscrit est divisé en cinq chapitres. Le premier chapitre porte sur
l’utilisation du formalisme de Lagrange pour décrire les oscillations des systèmes
physiques. L’étude des oscillations linéaires (de faible amplitude) libres des systèmes à
un degré de liberté est présentée dans le chapitre deux. Le troisième chapitre traite le
mouvement amorti qui prend en compte les forces de frottement de type visqueux
proportionnelles à la vitesse du mobile. La notion de résonance consacrée aux
oscillations forcées est présentée au quatrième chapitre. Le cinquième chapitre traite
les vibrations de systèmes à plusieurs degrés de liberté. Les analogies entre les
systèmes électriques et mécaniques sont présentées dans les cinq chapitres.
Chaque chapitre est suivi d’une série de problèmes avec solutions détaillées
permettant aux étudiants de mieux assimilés les phénomènes étudiés. Aussi, le
manuscrit est enrichi par deux travaux pratiques en relation avec les sujets traités.
SOMMAIRE
Chapitre 1 : Généralités sur les vibrations
1.1 Définitions
1.2 Exemples d’application
1.3 Modélisation physique
1.4 Nombre de degrés de liberté
1.5 Energie totale d’un système mécanique
1.5.1 Equilibre stable
1.5.2 Equilibre instable
1.6 Nature des forces appliquées aux systèmes mécaniques
1.7 Méthodes de détermination de la période d’oscillation
1.7.1 Principe de conservation de l’énergie mécanique
1.7.2 La loi de la dynamique de Newton
1.7.3 Formalisme de Lagrange
1.7.3.1 Genèse du principe de moindre action
1.7.3.2 Contraintes
1.7.3.3 Equations d’Euler-Lagrange
1.7.3.3.a Cas de systèmes conservatifs
1.7.3.3.b Cas de forces de frottement dépendant de la vitesse
1.7.3.3.c Fonction de dissipation de Rayleigh
1.7.3.3.d Cas d’une force extérieure dépendant du temps
Exercices
Travail pratique : Conservation de l’énergie mécanique – Roue de Maxwell
Chapitre 2 : Mouvement oscillatoire à un degré de liberté
2.1 Définitions
2.2 Exemple d’oscillations mécaniques (masse+ ressort)
2.3 Bilan énergétique
2.4 Applications
2.4.1 La chute libre (Le Bungee)
2.4.2 Pendule simple
2.4.3 Oscillation non linéaire
2.4.4 Pendule pesant
2.4.5 Pendule de torsion
2.5 Oscillations électriques
Exercices
Chapitre 3 : Mouvement amorti à un degré de liberté
3.1 Définitions
3.2 Modélisation mathématique
3.2.1 Cas d’un amortissment fort
3.2.2 Cas d’un amortissment critique
3.2.3 Cas d’un amortissment faible
3.3 Aspects énergétiques
3.4 Système électrique équivalent
Exercices
Chapitre 4 : Mouvement oscillatoire forcé d’un système mécanique
à un degré de liberté
4.1 Définitions
4.2 Cas d’une force extérieure constante
4.2.1 Cas d’un amortissment faible
4.2.2 Cas d’un amortissment critique
4.2.3 Cas d’un amortissment fort
4.3 Cas d’une force extérieure sinusoïdale
4.3.1 Etude de l’amplitude en fonction de la pulsation extérieure
4.3.1.a Dangers de la résonance
4.3.2 Etude de la phase en fonction de la pulsation extérieure
4.4 Bande passante
4.5 Cas d’une force périodique non-sinusoïdale
4.6 Energies mises en jeu
4.7 Système électrique équivalent
4.8 Effet Pogo
4.9 Système électrodynamique : le haut parleur
Travail pratique : Système amorti forcé- Pendule de Pohl
Exercices
Chapitre 5 : Mouvement oscillatoire forcé d’un système mécanique
à un degré de liberté
5.1 Définitions
5.1.1 Système mécanique à plusieurs sous systèmes découplés
5.1.2 Système mécanique plusieurs sous systèmes couplés
5.2 Types de couplages
5.2.a Couplage par élasticité
5.2.b Couplage par viscosité
5.2.c Couplage par inertie
5.3 Battements
5.4 Oscillations forcées d’un système mécanique non amorti à deux degrés de liberté
5.5 Analogies électromécaniques
5.6 Modes propres de vibration d’un système mécanique à trois degrés de liberté
Exercices
Chapitre 1 : Généralités sur les oscillations
PAGE 1
VIBRATIONS
Chapitre 1:
Généralités sur les oscillations
Chapitre 1 : Généralités sur les oscillations
PAGE 2
1.1 Définitions:
La vibration est un phénomène physique oscillatoire d’un corps en mouvement
autour de sa position d’équilibre. Parmi les mouvements mécaniques les plus variés, il
existe des mouvements qui se répètent : le mouvement d'une balançoire, le mouvement
alternatif des pistons d'un moteur à explosion. Aussi, les ailes d'une moustique vibrent
à une cadence de 100 battement par seconde et produisent un son audible. Après un
tremblement de terre, celle-ci continue à vibrer à raison d'une oscillation par heure. Le
corps humain est le lieu de plusieurs phénomènes de vibrations: le coeur bat, les
poumons oscillent, on tremble lorsqu'on a froid, et on ne peut entendre ni parler que
grâce aux vibrations du tympan et des larynges. Tous ces mouvements ont un trait
commun : une répétition du mouvement sur un cycle.
Un cycle est une suite ininterrompue de mouvements ou de phénomènes qui se
renouvellent toujours dans le même ordre. Prenenos à titre d'exemple le cycle à quatre
temps d'un moteur à explosion. Un cycle complet comprend quatre étapes (admission,
compression, explosion, échappement) qui se répètent durant un cycle moteur.
On appelle mouvement périodique un mouvement qui se répète et dont chaque cycle
se reproduit identiquement. La durée d'un cycle est appelée période T, et mesurée en
seconde s. Aussi, on définit la fréquence d’oscillations f comme le nombre
d’oscillations qui ont lieu pendant la période T :
Tf
1 (1.1)
mesurée en s-1 ou en Hertz (Hz). En multipliant la fréquence f par 2 on obtient
l’expression de la pulsation :
f 2 (1.2)
mesurée en rad.s-1
Un mouvement périodique particulièrement intéressant dans le domaine de la
mécanique est celui d'un objet qui se déplace à partir de sa position d'équilibre et y
revient en effectuant un mouvement de va-et-vient par rapport à cette position.
Chapitre 1 : Généralités sur les oscillations
PAGE 3
Ce type de mouvement périodique se nomme oscillation ou mouvement oscillatoire.
Les oscillations d'une masse reliée à un ressort, le mouvement d'un pendule ou les
vibrations d'un instrument à corde sont des exemples de mouvements oscillatoires.
Il est à noter que les vibrations peuvent représenter un risque pour la santé des
salariés. On distingue deux modes d’exposition: les vibrations transmises à l’ensemble
du corps, notamment lors de la conduite d’engins, et les vibrations transmises aux
membres supérieurs, lors de l’utilisation de machines portatives.
En général les corps n'oscillent pas entre des limites précises à cause des forces
de frictions qui dissipent l'énergie du mouvement. On ne peut pas donc éliminer la
friction des mouvement périodiques mais on peut enlever son effet d'amortissement en
introduisant une force extérieure (une énergie compensatrice).
1.2 Exemples d’applications :
Les vibrations transmises à l’ensemble du corps par les véhicules et les engins
(chariots de manutention, engins de chantier…) et certaines machines industrielles
fixes (tables vibrantes, concasseurs…).
Figure 1.1 : Les vibrations dues aux engins mécaniques
Les vibrations transmises aux membres supérieurs par des machines portatives,
guidées à la main (pilonneuses, plaques vibrantes…) ou par des pièces travaillées
tenues à la main (polissage...).
Chapitre 1 : Généralités sur les oscillations
PAGE 4
.Figure 1.2 : les vibrations transmises par les machines portatives
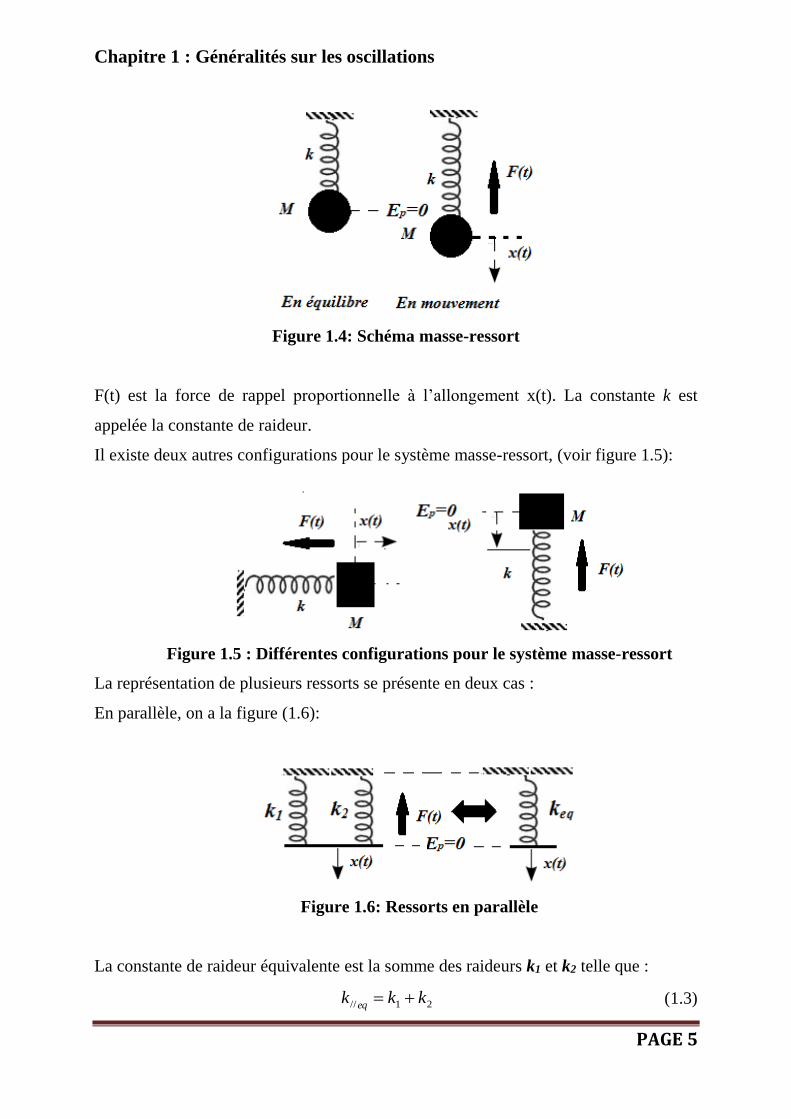
Tout système mécanique, incluant les machines industrielles les plus
complexes, peut être représenté par des modèles formés d’un ressort, un amortisseur et
une masse. Le corps humain, souvent qualifié de "belle mécanique", est décomposé à
la figure 1.3 en plusieurs sous-systèmes "masse-ressort-amortisseur" représentant la
tète, les épaules, la cage thoracique et les jambes ou les pieds.
Figure 1.3 : Modélisation masse-ressort-amortisseur de l’homme.
1.3 Modélisation physique :
Pour comprendre le phénomène vibratoire, on associe à tous les systèmes physiques un
système "masse-ressort" qui constitue un excellent modèle représentatif pour étudier
les oscillations (voir figure 1.4).
Chapitre 1 : Généralités sur les oscillations
PAGE 5
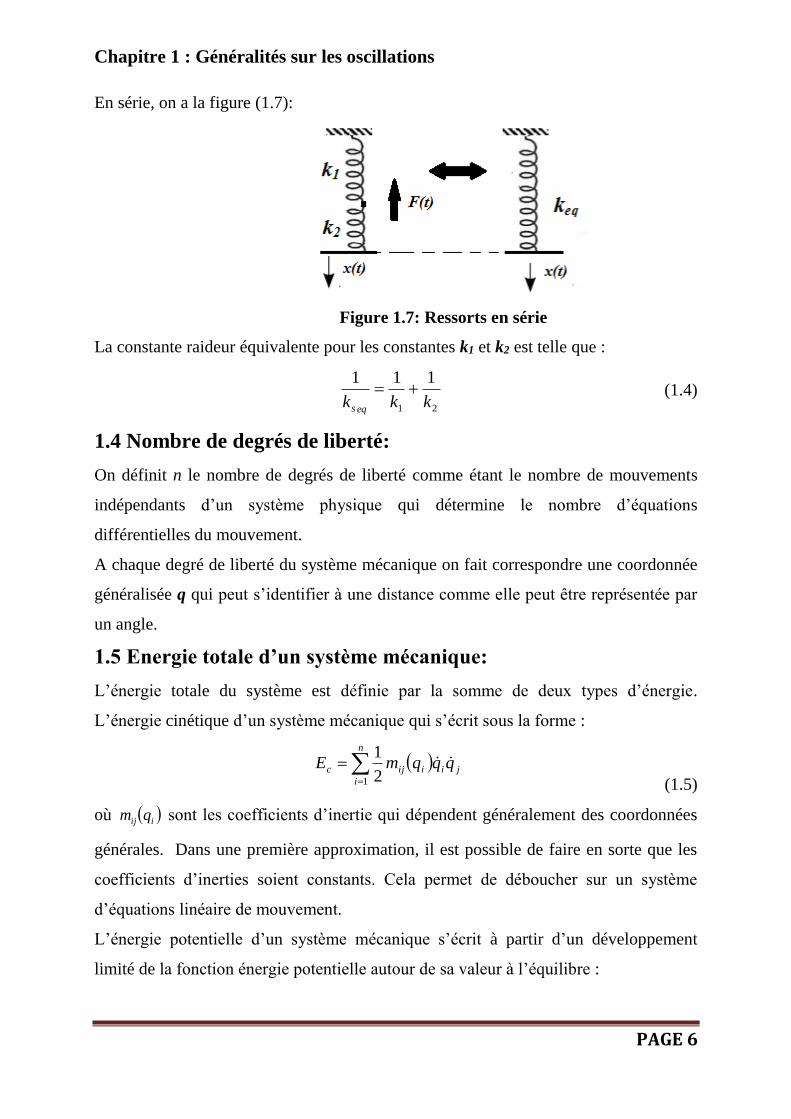
Figure 1.4: Schéma masse-ressort
F(t) est la force de rappel proportionnelle à l’allongement x(t). La constante k est
appelée la constante de raideur.
Il existe deux autres configurations pour le système masse-ressort, (voir figure 1.5):
Figure 1.5 : Différentes configurations pour le système masse-ressort
La représentation de plusieurs ressorts se présente en deux cas :
En parallèle, on a la figure (1.6):
Figure 1.6: Ressorts en parallèle
La constante de raideur équivalente est la somme des raideurs k1 et k2 telle que :
21// kkkeq
(1.3)
Chapitre 1 : Généralités sur les oscillations
PAGE 6
En série, on a la figure (1.7):
Figure 1.7: Ressorts en série
La constante raideur équivalente pour les constantes k1 et k2 est telle que :
21
111
kkkeqs
(1.4)
1.4 Nombre de degrés de liberté:
On définit n le nombre de degrés de liberté comme étant le nombre de mouvements
indépendants d’un système physique qui détermine le nombre d’équations
différentielles du mouvement.
A chaque degré de liberté du système mécanique on fait correspondre une coordonnée
généralisée q qui peut s’identifier à une distance comme elle peut être représentée par
un angle.
1.5 Energie totale d’un système mécanique:
L’énergie totale du système est définie par la somme de deux types d’énergie.
L’énergie cinétique d’un système mécanique qui s’écrit sous la forme :
n
i
jiiijc qqqmE1 2
1
(1.5)
où iij qm sont les coefficients d’inertie qui dépendent généralement des coordonnées
générales. Dans une première approximation, il est possible de faire en sorte que les
coefficients d’inerties soient constants. Cela permet de déboucher sur un système
d’équations linéaire de mouvement.
L’énergie potentielle d’un système mécanique s’écrit à partir d’un développement
limité de la fonction énergie potentielle autour de sa valeur à l’équilibre :

Chapitre 1 : Généralités sur les oscillations
PAGE 7
...2
10,,0,,
2
1,1
1
ji
eqji
pn
ji
i
n
i eqi
p
pnp qqqq
Eq
q
EEqqE
(1.6)
0,,0 pE est une constante qu’on peut prendre nulle en choisissant convenable une
référence pour l’énergie potentielles. Aussi, l’équilibre du système est caractérisé par:
0
0
iqi
p
q
E (1.7)
Ce sont là des conditions d’équilibre qui servent à simplifier l’expression de l’énergie
potentielle.
Un mouvement oscillatoire est dit harmonique si l’allongement est faible. A cet effet,
on se contente des termes quadratiques dans l’énergie potentielle :
ji
eqji
pn
ji
np qqqq
EqqE
2
1,
12
1,, (1.8)
où
eqji
p
ijqq
Ek
2
sont les coefficients de rigidité.
On distingue pour les systèmes mécaniques deux types d’équilibre :
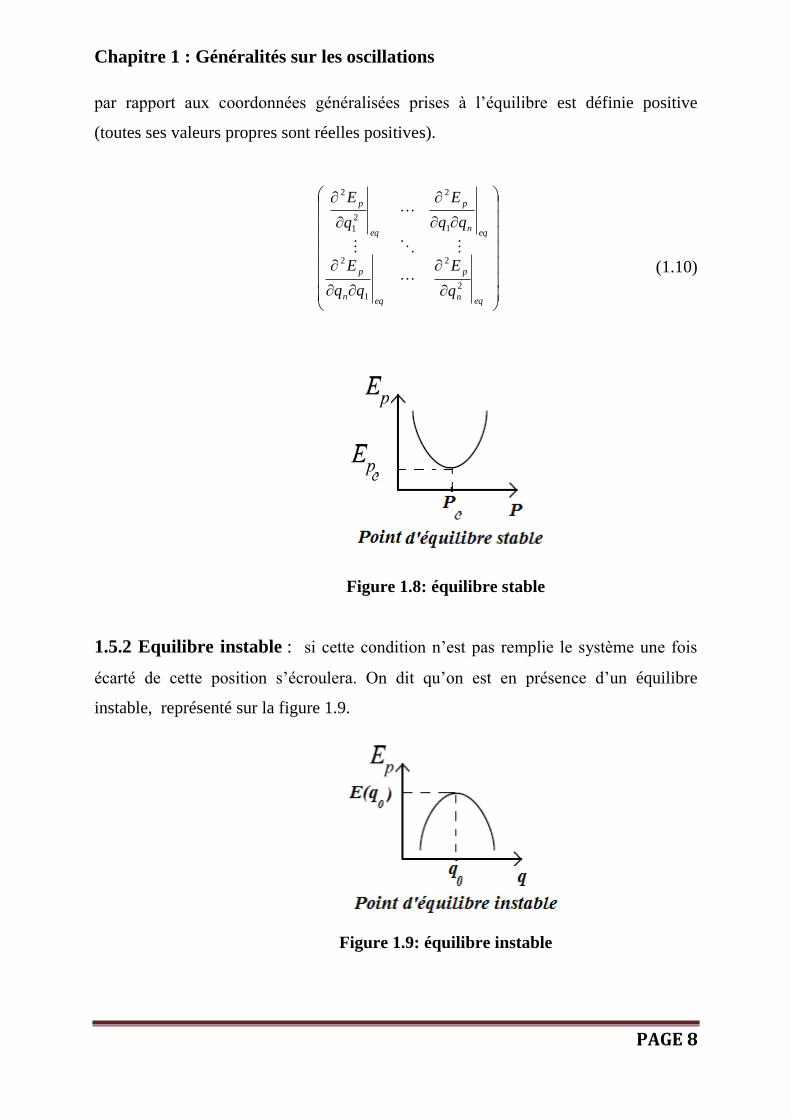
1.5.1 Equilibre stable:
Un système mécanique une fois déplacé de sa position d’équilibre tend à la
retrouver en faisant des oscillations. Il est représenté par la figure 1.8. Dans le cas d’un
système à un seul degré de liberté, l’équilibre stable est mathématiquement obtenu
lorsque
02
2
eq
p
q
E
(1.9)
Ceci est aussi la condition d’oscillation du système autour de sa position d’équilibre.
Dans le cas d’un système à n degré de liberté, la condition d’oscillation est obtenue
lorsque la matrice construite à partir des dérivées deuxièmes de l’énergie potentielle
Chapitre 1 : Généralités sur les oscillations
PAGE 8
par rapport aux coordonnées généralisées prises à l’équilibre est définie positive
(toutes ses valeurs propres sont réelles positives).
eqn
p
eqn
p
eqn
p
eq
p
q
E
E
E
q
E
2
2
1
2
1
2
2
1
2
(1.10)
Figure 1.8: équilibre stable
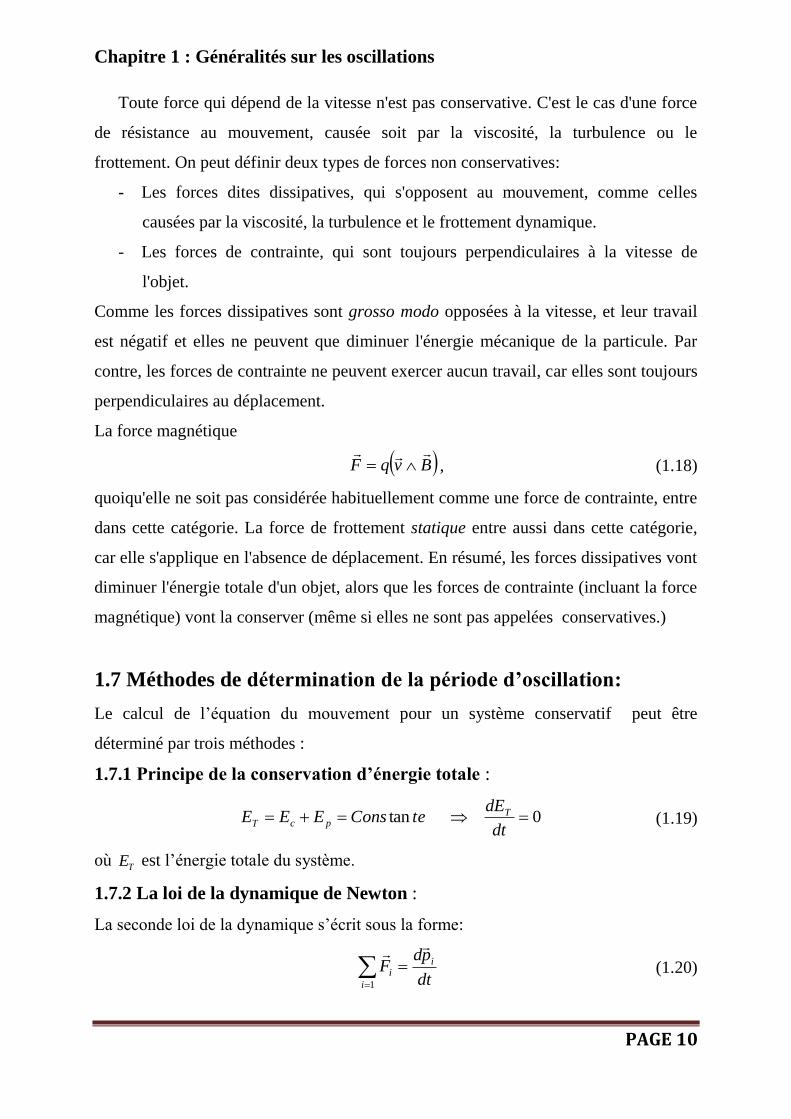
1.5.2 Equilibre instable : si cette condition n’est pas remplie le système une fois
écarté de cette position s’écroulera. On dit qu’on est en présence d’un équilibre
instable, représenté sur la figure 1.9.
Figure 1.9: équilibre instable

Chapitre 1 : Généralités sur les oscillations
PAGE 9
Dans ce cas, la force de rappel prend la forme linéaire en fonction de l’allongement et
s’oppose au mouvement telle que:
n
j
j
eqji
p
i
p
q qqq
E
q
EF
i
1
2
2
1 (1.11)
Dans le cas d’un système simple à un degré de liberté, l’énergie potentielle s’écrit sous
la forme suivante:
2
2
1kxE p (1.12)
où k est la constante de raideur du ressort, et la force de rappel s’écrit :
kxF (1.13)
C’est la loi de Hooke.
Pour le pendule de torsion l’énergie de potentielle s’écrit alors :
2
2
1DE p (1.14)
où D est la constante de torsion. Ainsi, le moment de rappel s’écrit alors :
tDtM )( (1.15)
1.6 Nature des forces appliquées aux systèmes mécaniques:
On démontre qu'un champ de force F
est conservatif si et seulement si le rotationnel
du champ vectoriel F
est nul. Ceci vient du fait que le rotationnel d'un gradient est
toujours nul
0
U (1.16)
où U est un potentiel à l’origine de la force F
, telle que
UF
(1.17)
Le travail d'une force conservative est indépendant de la trajectoire et ne dépend que
de la valeur du potentiel U aux points de départ et d'arrivée et est égal au gain
d'énergie cinétique de la particule (énergie cinétique finale moins énergie cinétique
initiale) alors que le travail des forces non conservatives est égal au gain d'énergie
totale de la particule.
Chapitre 1 : Généralités sur les oscillations
PAGE 10
Toute force qui dépend de la vitesse n'est pas conservative. C'est le cas d'une force
de résistance au mouvement, causée soit par la viscosité, la turbulence ou le
frottement. On peut définir deux types de forces non conservatives:
- Les forces dites dissipatives, qui s'opposent au mouvement, comme celles
causées par la viscosité, la turbulence et le frottement dynamique.
- Les forces de contrainte, qui sont toujours perpendiculaires à la vitesse de
l'objet.
Comme les forces dissipatives sont grosso modo opposées à la vitesse, et leur travail
est négatif et elles ne peuvent que diminuer l'énergie mécanique de la particule. Par
contre, les forces de contrainte ne peuvent exercer aucun travail, car elles sont toujours
perpendiculaires au déplacement.
La force magnétique
BvqF
, (1.18)
quoiqu'elle ne soit pas considérée habituellement comme une force de contrainte, entre
dans cette catégorie. La force de frottement statique entre aussi dans cette catégorie,
car elle s'applique en l'absence de déplacement. En résumé, les forces dissipatives vont
diminuer l'énergie totale d'un objet, alors que les forces de contrainte (incluant la force
magnétique) vont la conserver (même si elles ne sont pas appelées conservatives.)
1.7 Méthodes de détermination de la période d’oscillation:
Le calcul de l’équation du mouvement pour un système conservatif peut être
déterminé par trois méthodes :
1.7.1 Principe de la conservation d’énergie totale :
0tan dt
dEteConsEEE T
pcT
(1.19)
où TE est l’énergie totale du système.
1.7.2 La loi de la dynamique de Newton :
La seconde loi de la dynamique s’écrit sous la forme:
1i
ii
dt
(1.20)
Chapitre 1 : Généralités sur les oscillations
PAGE 11
Où ip
est la quantité de mouvement de la masse im . Une équation importante
(théorème du moment cinétique) découlant de cette même équation est la suivante:
1
//
i
i
Oi
Odt
JdM
(1.21)
où i
OM /
est le moment de la force appliquée sur la masse im et
iJ
le moment cinétique
associé à la masse im .
1.7.3 Méthode de Lagrange-Euler:
1.7.3.1 Genèse du principe de moindre action :
La dynamique de Newton repose sur l'idée que l'action d'une force agissant sur un
objet consiste à changer sa quantité de mouvement. Leibniz, un contemporain de
Newton, avait plutôt tendance à mesurer le changement en énergie causé par la force,
et a, de ce fait, déplacé l'intérêt en la quantité de mouvement et le travail vers l'énergie
cinétique et l'énergie potentielle.
Les méthodes variationnelles établies par Lagrange et Hamilton, sont basées sur
l'analyse de l'énergie, et le système est traité comme un ensemble au lieu de parties
isolées. Il s'est avéré qu'il est plus facile de suivre l'évolution de l'énergie, quantité
scalaire, que de suivre des quantités cinématiques telles que les vitesses ou les
accélérations.
Prenons le cas d'un objet lancé en l'air et repérons deux points de sa trajectoire en deux
instants quelconques. Une infinité de courbes passent entre ces deux points et pourtant
la nature n'en choisit qu'une seule. Qu'est ce qui distingue cette courbe- la trajectoire
physique- de toutes les autres?
En 1744, Pierre-Louis Moreau de Maupertuis se posa cette question. Intuitivement il
pressentit que les phénomènes physiques répondaient à un premier, fondamental, selon
lequel la nature choisissait toujours, parmi toutes les possibilités qui s'offraient à elle,
celle qui était la plus efficace qui s'exprimait par un minimum de vitesse pour un
minimum de chemin parcouru. Il baptisa ce principe, le principe de moindre action.

Chapitre 1 : Généralités sur les oscillations
PAGE 12
Mathématiquement, Maupertuis traduisit le principe de moindre action comme suit. Si
l'on considère le mouvement d'un corps entre deux points A au temps At et B au
temps Bt . Pour une énergie totale E donnée, la trajectoire sélectionnée par la nature
est celle pour laquelle la grandeur
B
A
t
t
B
A rdvmK
. (1.22)
est minimale.
En remarquant que
dtvrd .
on obtient alors:
B
A
B
A
t
t
t
t
B
A dttvTdtvvmK ,2..
(1.23)
où tvT ,
est l'énergie cinétique du corps.
Quelques années plus tard, et à partir d'une intuition semblable à celle de Mapertuis,
Euler parvient à un énoncé très similaire de l'action mais en partant de l'idée que les
corps tendent à adopter un état où l'énergie potentielle est minimale. L'action d'Euler
s'exprimait en fonction de l'énergie potentielle trU ,
au lieu de l'énergie cinétique.
En faisant la synthèse de ces deux démarches, Lagrange a eu l’idée de proposer une
nouvelle action qui s’écrivait sous la forme :
B
A
t
t
B
A dttrUtvrTS ,,,
(1.24)
où la quantité
trUtvrTtvrL ,,,,,
est connue sous le nom de Lagrangien dus sytème.
La méthode de Lagrange compare les actions correspondant à différentes trajectoires
possibles et choisit le chemin pour lequel l’action est minimale. Ce critère débouche, à
l’aide du calcul variationnel, aux équations dites d’Euler-Lagrange gouvernant le
mouvement des corps rigides.
1.7.3.2 Contraintes :
En dehors des forces agissant sur un système lors de son mouvement, il existe dans la
plupart des problèmes de la dynamique des restrictions sur le mouvement, connues
Chapitre 1 : Généralités sur les oscillations
PAGE 13
sous le nom de contraintes, et qui sont dues à la nature du système et de son
environnement. Ces contraintes sont exprimées sous formes de relations entre
certaines coordonnées, leurs taux de variation, etc.
Ces contraintes exercent des forces sur le système et ainsi vont affecter l'évolution
dans le temps des coordonnées du système. Ce sont là des forces de contraintes ou
réactions. Dans la formulation du mouvement, basée sur les lois de Newton, les forces
appliquées sur le système ainsi que les forces de contraintes doivent toutes
incorporées. Ces dernières ne sont pas connues au préalable, puisque leurs valeurs
dépendent du mouvement lui-même. C'est précisément cela qui fait que les équations
du mouvement dans le formalisme de Newton sont difficiles à résoudre.
1.7.3.3 Equations d’Euler-Lagrange
Considérons une particule ponctuelle de masse m se déplaçant sans frottement sur une
courbe plane comprise dans le plan xOy et dont les coordonnées vérifient les
conditions suivantes :
0),(
0
yxf
z
Cette particule possède un seul degré de liberté. On choisit une variable q ; appelée
coordonnée généralisée pour repérer sa position.
Soit r
le vecteur de position de la particule qui s’exprime en fonction de q comme
suit : )(qrr
On considère F
la résultante de toutes les forces s’exerçant sur la particule. La relation
fondamentale de la dynamique s’écrit alors :dt
vdmF
, où
dt
rdv
est le vecteur de la
vitesse de la particule.
Soit dw le travail fournie par la force F
lors d’un déplacement infinitésimale rd
comme suit :
rdFdw
.
Le déplacement rd
peut s’écrire comme suit :

Chapitre 1 : Généralités sur les oscillations
PAGE 14
dqq
rrd
Dans ce cas dw peut se mettre sous la forme :
dqq
r
dt
vdmdq
q
rFdw
.
(1.25)
On appelle qF la force généralisée conjuguée de q ; où q-composante de la force, la
quantité qF définie par :
dq
dw
q
rFFq
D’où :
dqFdw q
(1.26)
D’autre part, on a :
q
r
dt
dv
q
r
dt
vd
q
rv
dt
d
Sachant que :
q
v
dt
rd
r
dt
d
On obtient alors :
dq
vdv
q
rv
dt
d
q
r
dt
vd
(1.27)
On a :
r
dt
q
q
r
dt
rd
On obtient alors :
q
vv
q
vv
dt
d
q
r
dt
vdet
qd
v
q
r
Sachant maintenant que :
Chapitre 1 : Généralités sur les oscillations
PAGE 15
q
vvvv
qv
q
et
q
vvvv
qv
q
..2
1
2
1
..2
1
2
1
2
2
On obtient :
22
2
1
2
1. v
qv
qdt
d
q
r
dt
vd
L’expression du travail peut alors s’écrire comme suit :
dqvq
vqdt
dmdw
22
2
1
2
1
(1.28)
avec : 2
2
1mvEc est l’énergie cinétique de la masse m ; on obtient finalement :
dqFdqq
E
q
E
dt
detdq
q
E
q
E
dt
ddw q
cccc
On en déduit l’équation de d’Alembert pour un système à un degré de liberté :
q
cc Fq
E
q
E
dt
d
(1.29)
1.7.3.3.a Cas de systèmes conservatifs :
Pour les systèmes conservatifs, la force appliquée au système dérive d’un potentiel pE
et elle s’écrit :
q
EF
p
q
(1.30)
L’équation d’Euler- Lagrange devient alors :
q
E
q
E
q
E
dt
d pcc
(1.31)
Sachant que l’énergie potentielle pE ne dépend pas de la vitesse tel que :
0
q
E p
Finalement l’équation d’Euler-Lagrange peut alors s’écrire sous la forme suivante:
pc EELavecq
L
q
L
dt
d
0
(1.32)

Chapitre 1 : Généralités sur les oscillations
PAGE 16
où on a introduit la fonction de Lagrange (ou lagrangien du système) qui est la
différence de l’énergie cinétique et de l’énergie potentielle.
Pour un système conservatif à plusieurs degrés de liberté (nombre n), l’équation
d’Euler-Lagrange s’écrit comme suit :
niq
L
q
L
dt
d
ii
,...10
(1.33)
1.7.3.3.b Cas des forces de frottement dépendant de la vitesse :
Considérons une situation physique dans laquelle la particule est soumise à des
forces de frottement de viscosité dont la résultante frf
est de la forme :
vf fr
(1.34)
où est le coefficient de frottement et v
le vecteur vitesse de la particule.
Pour calculer la force généralisée pF
correspondante, nous utilisons la définition du
paragraphe précédent :
22
.
q
ravecq
t
q
q
r
q
rfF frp
Si en plus des forces qui dérivent d’un potentiel, le système est soumis à des forces de
frottement de viscosité, l’équation d’Euler-Lagrange s’écrit alors :
pc EELavecqq
L
q
L
dt
d
(1.34)
Pour un système dissipatif (non conservatif) de plusieurs degrés de liberté l’équation
du mouvement déterminée comme suit :
o Système en translation :
niFq
L
q
L
dt
dext
ii
,...1
(1.35)
où extF
sont les forces extérieures appliquées au système.

Chapitre 1 : Généralités sur les oscillations
PAGE 17
o Système en rotation
niMq
L
q
L
dt
dext
ii
,...1
(1.36)
où extM
sont les moments extérieurs appliqués au système. Dans ce cas les forces
extérieures ne dérivent pas d’un potentiel.
1.7.3.3.c Fonction de dissipation de Rayleigh:
Calculons le travail frdw fourni par la force de frottement pendant un intervalle de
temps dt lors d’un déplacement rd
:
dtvrdfdw frfr
2
(1.37)
La quantité de chaleur dQ gagnée par le système en interaction avec la particule est
telle que :
dtvdQ 2 (1.38)
On définit dP la puissance dissipée par les forces de frottement sous forme de chaleur
comme suit :
22 xvPd (1.39)
Cette puissance dissipée peut être exprimée en fonction de q par :
2
22
2 qt
q
q
r
dt
rdvPd
(1.40)
Par définition, la fonction dissipation est égale à la demi-puissance dissipée et s’écrit
comme suit :
2
2
1
2
1qPD d (1.41)
En général, et pour un système à n degré de liberté, la fonction de dissipation pour
des frottements de type visqueux (vitesses faibles) a la forme quadratique des vitesses
généralisées :
j
n
ji
iij qqD
1,2
1 (1.42)
où ij sont appelés les coefficients de frottements visqueux.
Chapitre 1 : Généralités sur les oscillations
PAGE 18
La iq -composante iqF de la force de frottement peut alors s’écrire :
i
DF
i
(1.43)
Finalement, l’équation d’Euler- Lagrange s’écrit alors :
niq
D
q
L
q
L
dt
d
iii
,,1
(1.44)
1.7.3.3.d Cas d’une force extérieure dépendant du temps
Considérons le cas plus général d’une force extérieure dépendant du temps agissant sur
un système soumis à des forces de frottement ‘dérivant ‘ d’une fonction dissipation D.
Soit extF la q-composante de la force extérieure. Dans ce cas l’équation d’Euler-
Lagrange peut s’écrire sous la forme suivante:
pcext EELavecFq
D
q
L
q
L
dt
d
(1.45)
Dans le cas général d’un système à plusieurs degrés de liberté, il y a autant d’équations
de Lagrange que de degrés de liberté. Ainsi, si le système possède n degrés de liberté,
il est nécessaire d’avoir n coordonnées généralisées pi (i = 1, 2, ...., n). Nous aurons
ainsi n équations d’Euler-Lagrange comme suit :
ext
i
iii
Fq
D
q
L
q
L
dt
d
(1.46)
où ext
iF est la force extérieure qui fait varier la coordonnée généralisée iq .
Chapitre 1 : Généralités sur les oscillations
PAGE 19
Applications

Chapitre 1 : Généralités sur les oscillations
PAGE 20
Exercice de rappels mathématiques:
1- donner le module et la direction du nombre complexe 354 j .
2- Donner les parties réelle et imaginaire du nombre
54
2
j
Aetj
sachant que A et sont réels.
3- écrire les nombres complexes suivants sous la forme jba : jjZ et
83.0jZ .
Solution:
1- on calcule directement :
543454.54.54543
jjjjj
Le module du nombre complexe est égal à :
23.965434542
23
j
L’argument du nombre complexe est égal à :
4
543arctg
2-
)54(2
sin2
cos4154
2
jtjtA
j
Aetj
)54()cos()sin(4154
2
jtjtA
j
Aetj
La partie réelle du nombre complexe est égale à :
)cos(5)sin(441
ttA
La partie imaginaire du nombre complexe est égale à :
Chapitre 1 : Généralités sur les oscillations
PAGE 21
)sin(5)cos(441
ttA
3- Le nombre complexe
k
j
kjj eejZ
22
22
est
kjkj
eejZ
2
283.0
83.0
2283.0
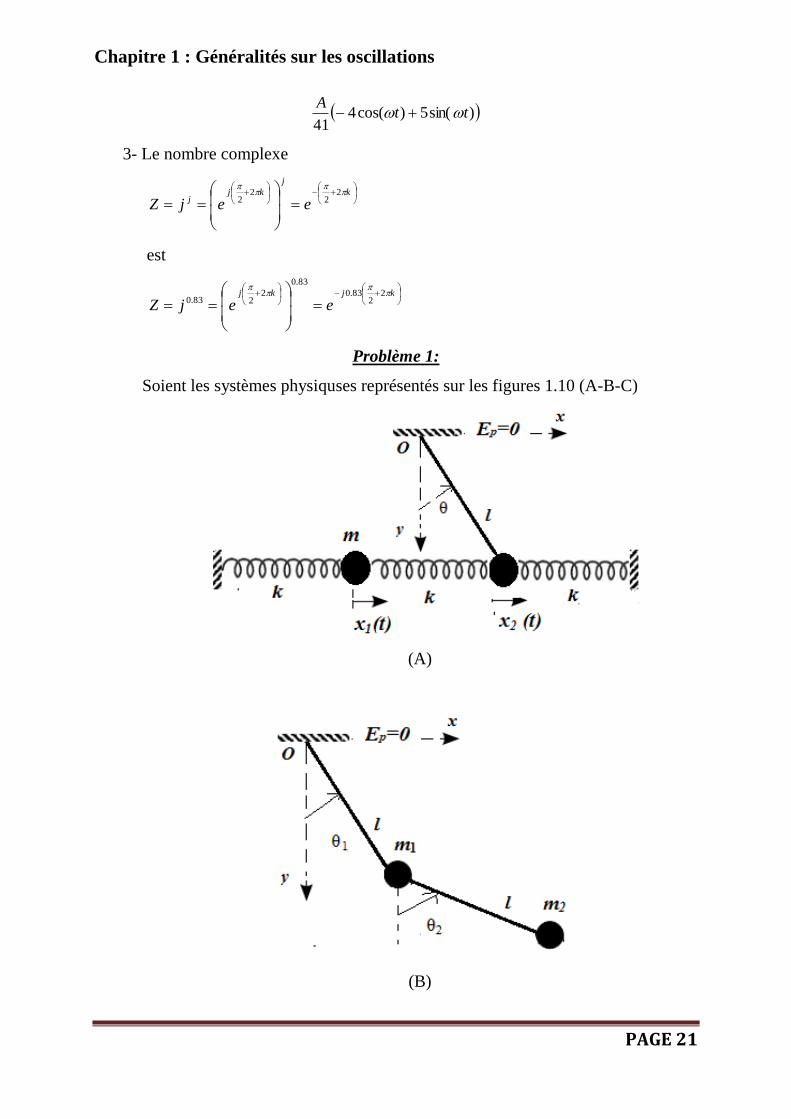
Problème 1:
Soient les systèmes physiquses représentés sur les figures 1.10 (A-B-C)
(A)
(B)
Chapitre 1 : Généralités sur les oscillations
PAGE 22
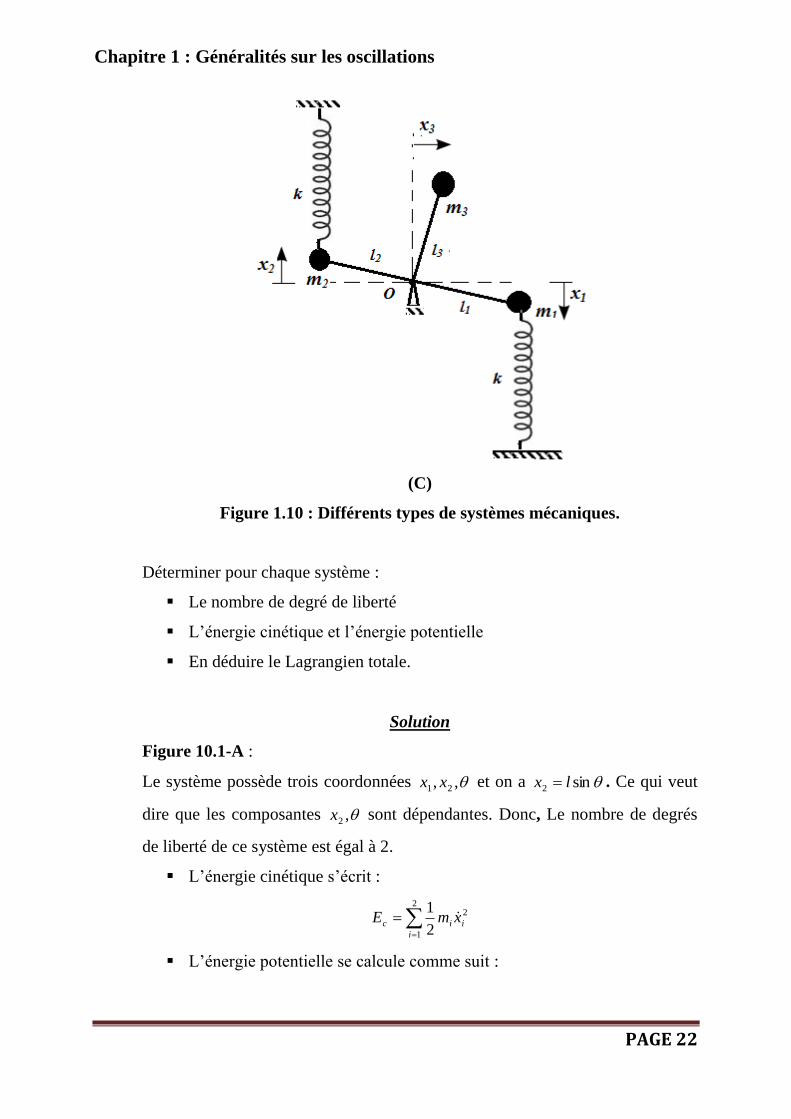
(C)
Figure 1.10 : Différents types de systèmes mécaniques.
Déterminer pour chaque système :
Le nombre de degré de liberté
L’énergie cinétique et l’énergie potentielle
En déduire le Lagrangien totale.
Solution
Figure 10.1-A :
Le système possède trois coordonnées ,, 21 xx et on a sin2 lx . Ce qui veut
dire que les composantes ,2x sont dépendantes. Donc, Le nombre de degrés
de liberté de ce système est égal à 2.
L’énergie cinétique s’écrit :
22
1 2
1i
i
ic xmE
L’énergie potentielle se calcule comme suit :

Chapitre 1 : Généralités sur les oscillations
PAGE 23
2
1
22
212
1cos)(
2
1
i
iip xkmglxxkE
Le Lagrangien s’écrit alors :
2
1
22
21
22
1 2
1cos)(
2
1
2
1
i
iii
i
ipc xkmglxxkxmEEL
Les coordonnées de ce système sont 21, qui sont indépendantes. D’où le
nombre de degré de liberté est égal à 2.
Le Lagrangien du système :
L’énergie cinétique s’écrit :
2m2
2m1c 21
Vm2
1Vm
2
1E
En calculant les vitesses par rapport au repère fixe :
))sinsin(ly
)coscos(lx(V)
)cos(cosly
)sin(sinlx(mO
)sinly
coslx(V)
cosly
sinlx(mO
2211m
2211mm
21m
21m
2
11m
11mm
1m
1m
1
2
2
2
2
2
1
1
1
1
1
D’où :
2m
2m
2m
2m
2m
2m
222
111
yxV
yxV
Après calcul, l’énergie cinétique s’écrit alors:
)cos(lmlm2
1l)mm(
2
1E 2121
22
22
22
21
221c
Pour l’énergie potentielle on a :
)cos(cosglmcosglmE 21211p
Le Lagrangien devient alors:
)cos(cosglmcosglm
)cos(lmlm2
1l)mm(
2
1L
21211
21212
222
22
21
221
Chapitre 1 : Généralités sur les oscillations
PAGE 24
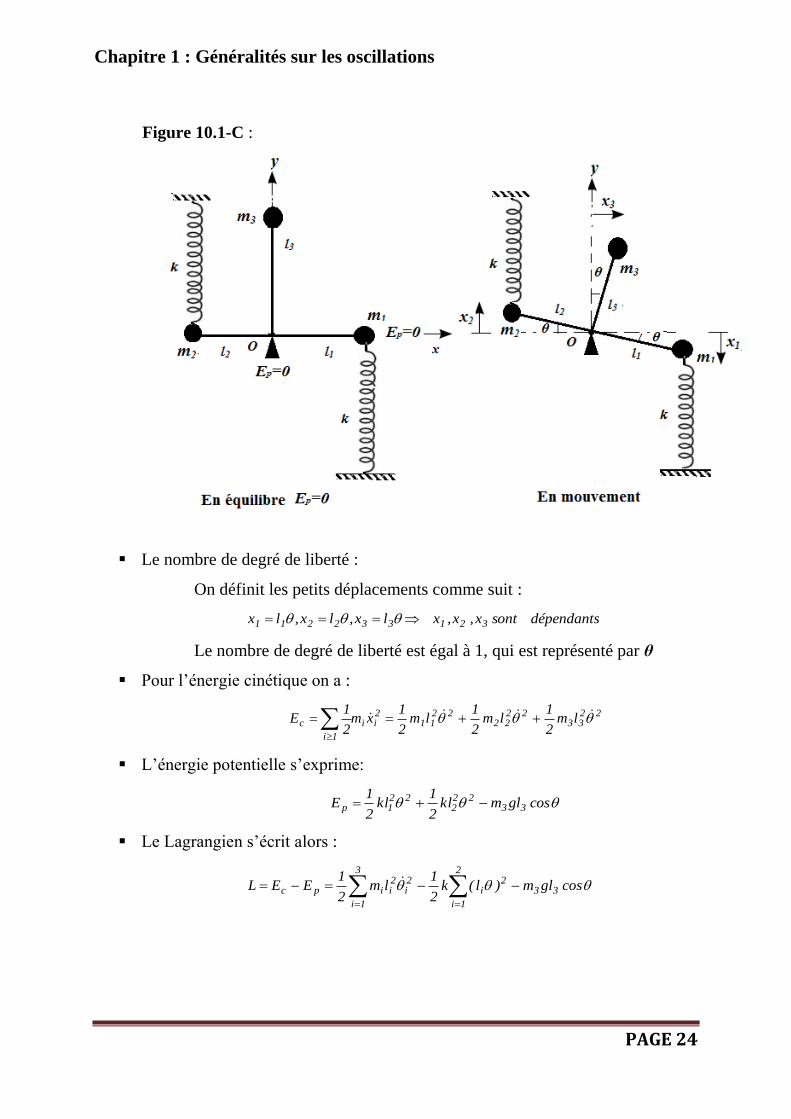
Figure 10.1-C :
Le nombre de degré de liberté :
On définit les petits déplacements comme suit :
dépendantssontx,x,xlx,lx,lx 321332211
Le nombre de degré de liberté est égal à 1, qui est représenté par θ
Pour l’énergie cinétique on a :
2233
2222
2211
2ii
1i
c lm2
1lm
2
1lm
2
1xm
2
1E
L’énergie potentielle s’exprime:
cosglmkl2
1kl
2
1E 33
222
221p
Le Lagrangien s’écrit alors :
cosglm)l(k2
1lm
2
1EEL 33
22
1i
i
3
1i
2i
2iipc
Chapitre 1 : Généralités sur les oscillations
PAGE 25
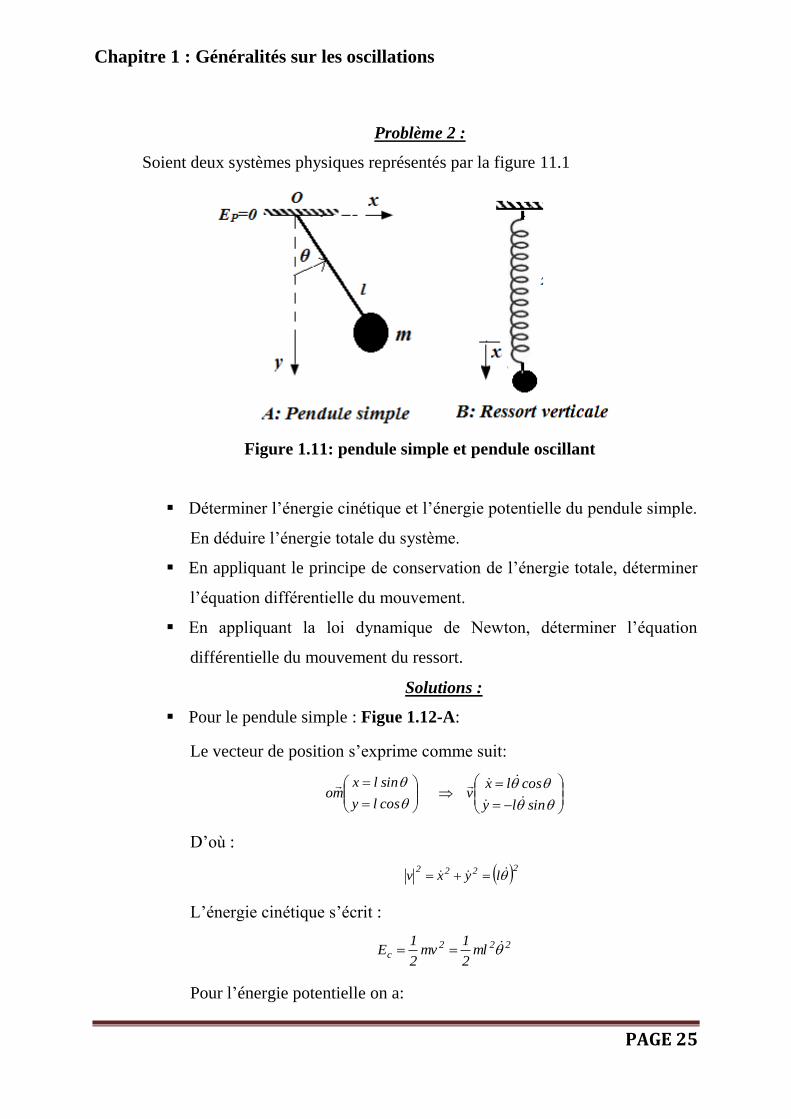
Problème 2 :
Soient deux systèmes physiques représentés par la figure 11.1
Figure 1.11: pendule simple et pendule oscillant
Déterminer l’énergie cinétique et l’énergie potentielle du pendule simple.
En déduire l’énergie totale du système.
En appliquant le principe de conservation de l’énergie totale, déterminer
l’équation différentielle du mouvement.
En appliquant la loi dynamique de Newton, déterminer l’équation
différentielle du mouvement du ressort.
Solutions :
Pour le pendule simple : Figue 1.12-A:
Le vecteur de position s’exprime comme suit:
sinly
coslxv
cosly
sinlxmo
D’où :
2222lyxv
L’énergie cinétique s’écrit :
222c ml
2
1mv
2
1E
Pour l’énergie potentielle on a:

Chapitre 1 : Généralités sur les oscillations
PAGE 26
cosmglEp
Alors, l’énergie totale du système s’écrit :
cos2
1 22 mglmlEEE pcT
En appliquant le principe de conservation de l’énergie totale pour un
système conservatif ; on a :
0cos2
10 22
mglml
dt
d
dt
dET
D’où :
0sin0sin2 glmglml
On obtient alors l’équation différentielle pour des petites oscillations
comme suit :
sin0)( avectl
g
Pour le ressort ; (Figure 1.12-B) on applique la loi dynamique de
Newton :
amF
Figure 1.12 -B : Etat du système en équilibre et en mouvement

Chapitre 1 : Généralités sur les oscillations
PAGE 27
En appliquant les différentes forces au système ; on obtient :
amFp
En projection sur l’axe Ox ; on obtient :
xmkxkxmgxmxxkmg
0
00 )(
Finalement l’équation différentielle du mouvement pour des petites oscillations
s’écrit :
0)( txm
kx
Problème 3 :
Une poulie de masse M, de moment d’inertie J, et de rayon R, suspendue au
point O par un ressort de raideur k. Le fil inextensible glisse sur la poulie sans
frottement relié par une masse m (voir figure 1.13.)
Déterminer le nombre de degré de liberté
Etablir l’énergie cinétique et l’énergie potentielle
En déduire le Lagrangien du système
Etablir l’équation différentielle du système par le principe de Lagrange
Figure 1.13: Mouvement oscillatoire de la polie
Chapitre 1 : Généralités sur les oscillations
PAGE 28
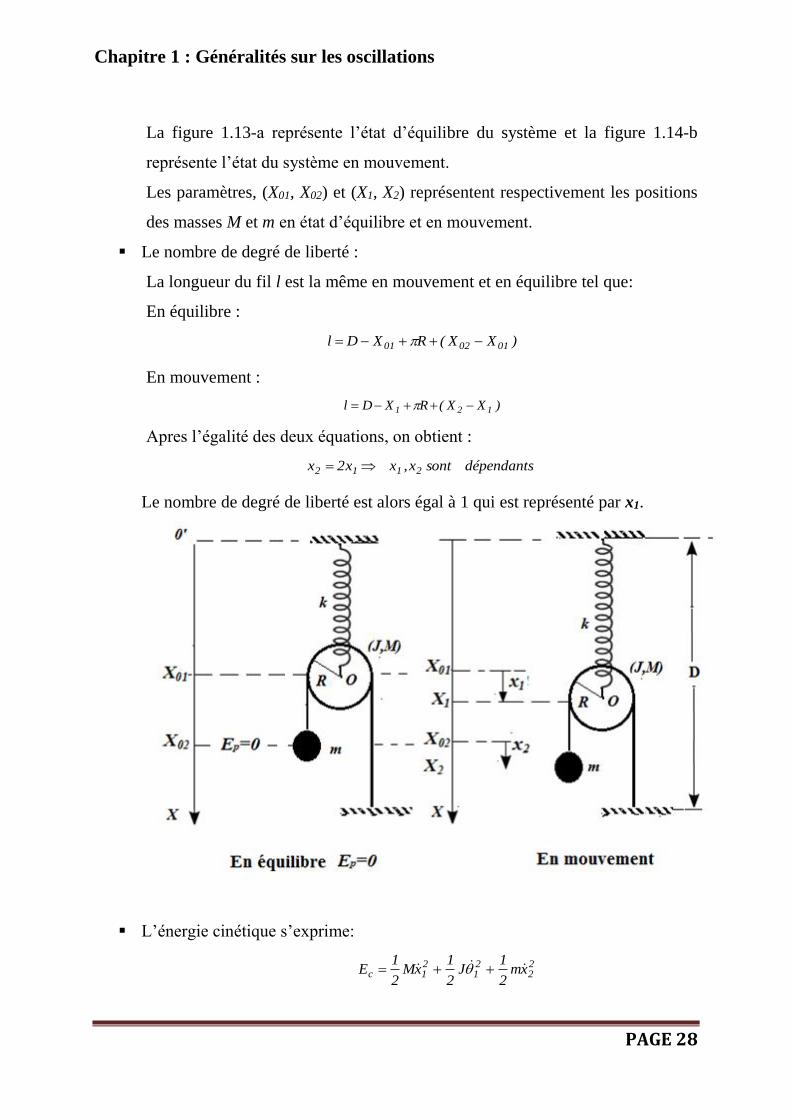
La figure 1.13-a représente l’état d’équilibre du système et la figure 1.14-b
représente l’état du système en mouvement.
Les paramètres, (X01, X02) et (X1, X2) représentent respectivement les positions
des masses M et m en état d’équilibre et en mouvement.
Le nombre de degré de liberté :
La longueur du fil l est la même en mouvement et en équilibre tel que:
En équilibre :
)XX(RXDl 010201
En mouvement :
)XX(RXDl 121
Apres l’égalité des deux équations, on obtient :
dépendantssontx,xx2x 2112
Le nombre de degré de liberté est alors égal à 1 qui est représenté par x1.
L’énergie cinétique s’exprime:
22
21
21c xm
2
1J
2
1xM
2
1E

Chapitre 1 : Généralités sur les oscillations
PAGE 29
Pour l’énergie potentielle:
21p kx
2
1E
Le Lagrangien s’écrit alors :
21
212pc kx
2
1x)
R
Jm2M(
2
1EEL
L’équation différentielle s’exprime comme suit:
0x)
R
Jm4M
k(x0
x
L)
x
L(
dt
d1
2
111
D’où l’équation du mouvement s’écrit :
0xx0x)
R
Jm4M
k(x 1
2011
2
1
Avec :
2
20
R
Jm4M
k
Chapitre 1 : Généralités sur les oscillations
PAGE 30
TRAVAIL PRATIQUE
Conservation de l'énergie mécanique –
Chapitre 1 : Généralités sur les oscillations
PAGE 31
Roue de Maxwell
Mots clés :
Roue de Maxwell, énergies cinétiques de translation et de rotation, énergie potentielle,
énergie mécanique, moment d'inertie, vitesse angulaire, vitesse instantanée.
Principe de l'expérience :
Une roue massique, pouvant se dérouler avec son axe le long de deux cordes, est
en mouvement dans le champ gravitationnel. Les énergies potentielle, de translation et
de rotation sont converties les unes aux autres et sont déterminées en fonction du
temps.
Liste du matériel:
Pied de support en A
Tige carrée , l = 1000 mm
Noix double
Mètre de démonstration, l = 1000 x 27 mm
Curseur pour mètre, rouge, plastique, la paire Roue de Maxwell
Fil de connexion, fiche 4 mm, 32 A, rouge, l = 100 cm
Fil de connexion, fiche 4 mm, 32 A, bleu, l = 100 cm
Barrière optique avec compteur
Dispositif d´arrêt avec déclenchement Bowden
Porte-plaque, ouverture 0...10 mm
Adaptateur, fiche BNC / douille 4 mm
Condensateur 100 nF/250 V
Alimentation 5 V DC/2,4 A avec fiches 4 mm
Objectifs :
1- Déterminer le moment d'inertie du disque de Maxwell.
2- A l'aide de la roue de Maxwell, déterminer, en fonction du temps:
a- l'énergie potentielle,
b- l'énergie de mouvement,
c- l'énergie de rotation.
Chapitre 1 : Généralités sur les oscillations
PAGE 32
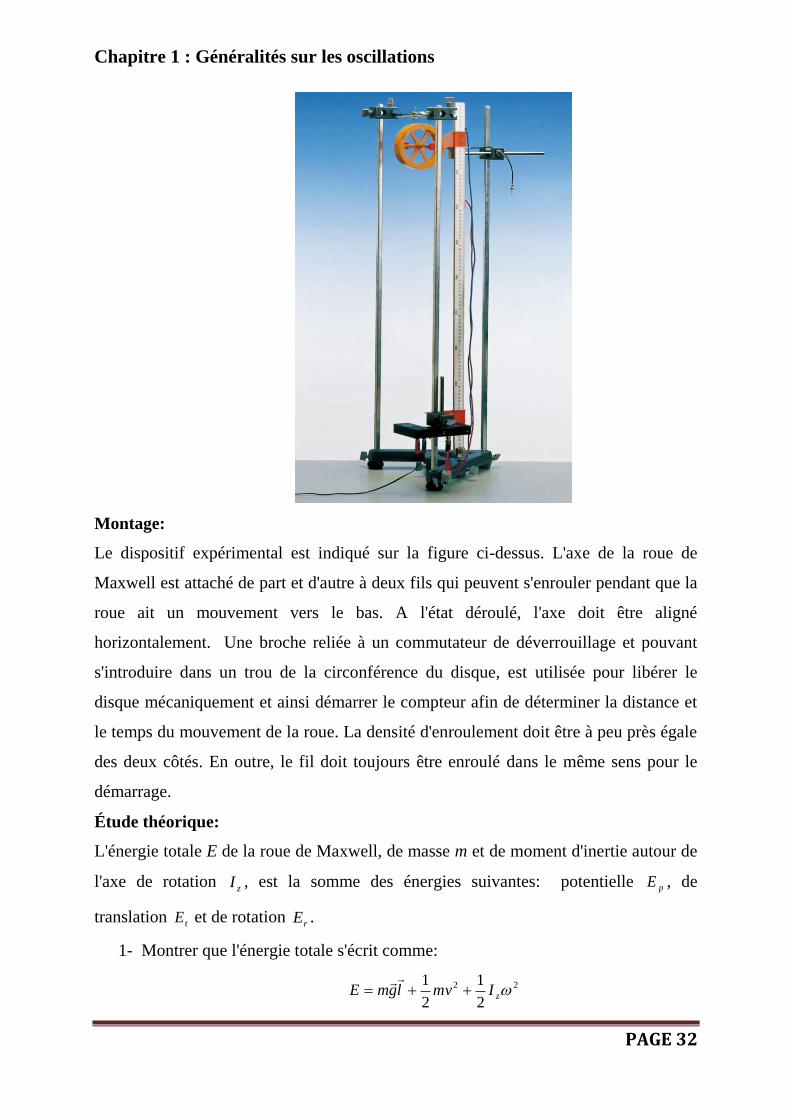
Montage:
Le dispositif expérimental est indiqué sur la figure ci-dessus. L'axe de la roue de
Maxwell est attaché de part et d'autre à deux fils qui peuvent s'enrouler pendant que la
roue ait un mouvement vers le bas. A l'état déroulé, l'axe doit être aligné
horizontalement. Une broche reliée à un commutateur de déverrouillage et pouvant
s'introduire dans un trou de la circonférence du disque, est utilisée pour libérer le
disque mécaniquement et ainsi démarrer le compteur afin de déterminer la distance et
le temps du mouvement de la roue. La densité d'enroulement doit être à peu près égale
des deux côtés. En outre, le fil doit toujours être enroulé dans le même sens pour le
démarrage.
Étude théorique:
L'énergie totale E de la roue de Maxwell, de masse m et de moment d'inertie autour de
l'axe de rotation zI , est la somme des énergies suivantes: potentielle pE , de
translation tE et de rotation rE .
1- Montrer que l'énergie totale s'écrit comme:
22
2
1
2
1zImvlgmE

Chapitre 1 : Généralités sur les oscillations
PAGE 33
où g
est l'accélération due à la gravité, l
la hauteur du centre de la roue par rapport à
un point choisi, v
la vitesse linéaire du centre de la roue et
la vitesse angulaire
parallèle à l'axe de rotation.
2- Montrer que rv
où r
est le vecteur position d'un point sur la
circonférence de l'axe de rotation de la roue relatif à son centre.
3- En faisant la projection sur un axe approprié, montrer que l'énergie totale s'écrit:
2
22
1v
r
ImmglE z
En supposant que l'énergie totale est conservée et en utilisant les conditions initiales
appropriées, montrer que :
t
r
Im
mgtv
z
2
et
2
2
t
r
Im
mgtl
z
Étude expérimentale:
On donne la masse de la roue m=0.436 kg et le rayon de son axe r =2.5 mm.
a- Étude de la variation de la hauteur en fonction du temps:
Pour différentes valeurs de tl , mesurer les temps moyens de parcours et reportez-les
sur le tableau suivant:
st
22 st
ml
1- Tracer sur un papier millimétré lln en fonction de tln .
2- En se proposant une loi de puissance entre la hauteur tl et le temps t sous la
forme,
kttl .
Chapitre 1 : Généralités sur les oscillations
PAGE 34
en déduire les valeurs de et de l'exposant de l'équation, k.
3- Quelle est la nature du mouvement?
4- Tracer sur un papier millimétrique la courbe tl en fonction de 2t et déterminer
la pente de la courbe (n'oubliez pas les rectangles d'erreur!).
5- En déduire la valeur de l'accélération a et le moment d'inertie de la roue zI
(n'oubliez pas les unités). On prend 2.81.9 smg .
6- Conclusion
a- Étude de la vitesse en fonction du temps:
Pour différentes valeurs de tl , mesurer les temps moyens de passage t de
l'axe de la roue et reportez-les dans le tableau suivant:
st
ml
st
1. smv
1- Tracer sur un papier millimétrique la courbe tv en fonction de t et
déterminer la pente de la courbe.
2- En déduire la valeur de l'accélération a et le moment d'inertie de la roue zI
(n'oubliez pas les unités).
3- Que peut-on conclure?
Étude de la conservation de l'énergie totale:
En utilisant les résultats précédents, remplissez le tableau suivant pour différentes
valeurs de tl .
avec ;
l'énergie potentielle: lgmE p ..
L'énergie de translation: 2.2
1vmEt
l'énergie de rotation: 2
2.
2
1v
r
IE z
r
et l'énergie totale rtp EEEE

Chapitre 1 : Généralités sur les oscillations
PAGE 35
ml
st
12 . smv
mNE p .
mNEt .
mNEr .
mNE .
1- Comparer les valeurs des énergies tE et rE .
2- Tracer sur un papier millimétré les courbes des énergies pE , rt EE et
E en fonction de t.
3- Comparer les courbes pE et rt EE .
4- Que peut-on conclure à propos de l'énergie totale E .
5- Si on abandonne la roue en mouvement d'une hauteur fixe pendant un temps
plus long, va-t-elle s'arrêter? Expliquer.
Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 36
Chapitre 2 :
Mouvement oscillatoire libre
à un degré de liberté
Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 37
2.1 Définitions:
Un système isolé oscillant à un degré de liberté est déterminé par la coordonnée
généralisée q(t) représentant l’écart d’amplitude par rapport à l’équilibre stable.
On définit l’oscillation harmonique par l’équation différentielle linéaire du second
ordre à coefficients constants suivante :
0)()( 2
0 tqtq
(2.1)
où ω0 est la pulsation propre du système.
On définit la période propre T0 comme suit :
0
0
2T
(2.2)
La solution de cette équation différentielle est de la forme sinusoïdale telle que :
)sin()cos()( 0201 tAtAtq (2.3)
dont la forme souligne que les solutions forment un espace vectoriel, et permet plus
facilement de mettre en place les conditions initiales.
L’équation horaire ci-dessus peut aussi se mettre sous la forme :
)cos()( 0 tAtq (2.4) où les constantes A et ϕ représentent respectivement l’amplitude des oscillations et le
déphasage qui sont déterminées par les conditions initiales suivantes :
0
0
)0(
)0(
qtq
qtq
L’allure de la solution q(t) ainsi que la vitesse du mobile sont représentées dans la
figure 2.1. Il faut signaler que toutes les oscillations de faible amplitude autour de la
position d’équilibre peuvent être assimilées à des mouvements linéaires et l’énergie
potentielle peut s’exprimer sous forme quadratique de la coordonnée généralisée q.
En revanche, au-delà d’une certaine amplitude l’oscillation devient non linéaire.
Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 38
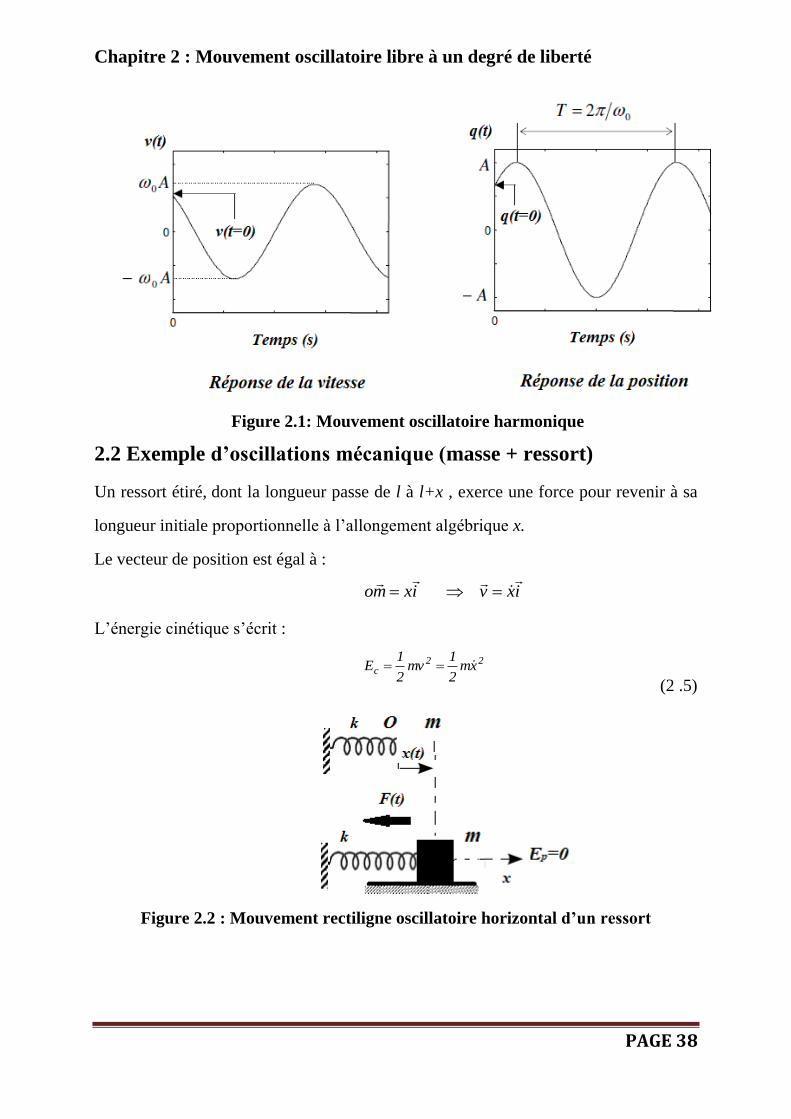
Figure 2.1: Mouvement oscillatoire harmonique
2.2 Exemple d’oscillations mécanique (masse + ressort)
Un ressort étiré, dont la longueur passe de l à l+x , exerce une force pour revenir à sa
longueur initiale proportionnelle à l’allongement algébrique x.
Le vecteur de position est égal à :
ixvixmo
L’énergie cinétique s’écrit :
22c xm
2
1mv
2
1E
(2 .5)
Figure 2.2 : Mouvement rectiligne oscillatoire horizontal d’un ressort

Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 39
L’énergie potentielle pour des petites oscillations s’écrit sous la forme:
22c xm
2
1mv
2
1E
(2.6)
Le Lagrangien du système prend donc la forme suivante:
22
2
1
2
1kxxmEEL pc
(2.7)
L’équation de mouvement est de la forme :
kxx
Lxm
x
L
x
L
x
L
dt
d
0
D’où
00 2
0 xxmkxxm (2.8)
La pulsation propre est égale :
m
k0 (2.9)
La solution de l’équation différentielle s’écrit alors :
)cos()( 0 tAtx
1.2.3 Bilan énergétique :
L’approche par l’énergie est très importante pour la compréhension du phénomène
physique. En effet, l’énergie totale du système ci-dessus s’écrit comme suit :
teconskxxmEEE pcT tan2
1
2
1 22
(2.10)
Au cours d’une oscillations harmonique, l’énergie totale se partage en proportions
variables entre l’énergie potentielle Ep et l’énergie cinétique Ec. C’est une propriété de
tout mouvement sous l’effet d’une force qui dérive d’un potentiel. L’allure de
l’énergie totale en fonction de x(t) est représentée sur la figure (2.3).

Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 40
Figure 2.3 : Energie potentielle et cinétique d’un oscillateur harmonique libre en
fonction de l’écart x par rapport à sa position d’équilibre
2.4 Applications :
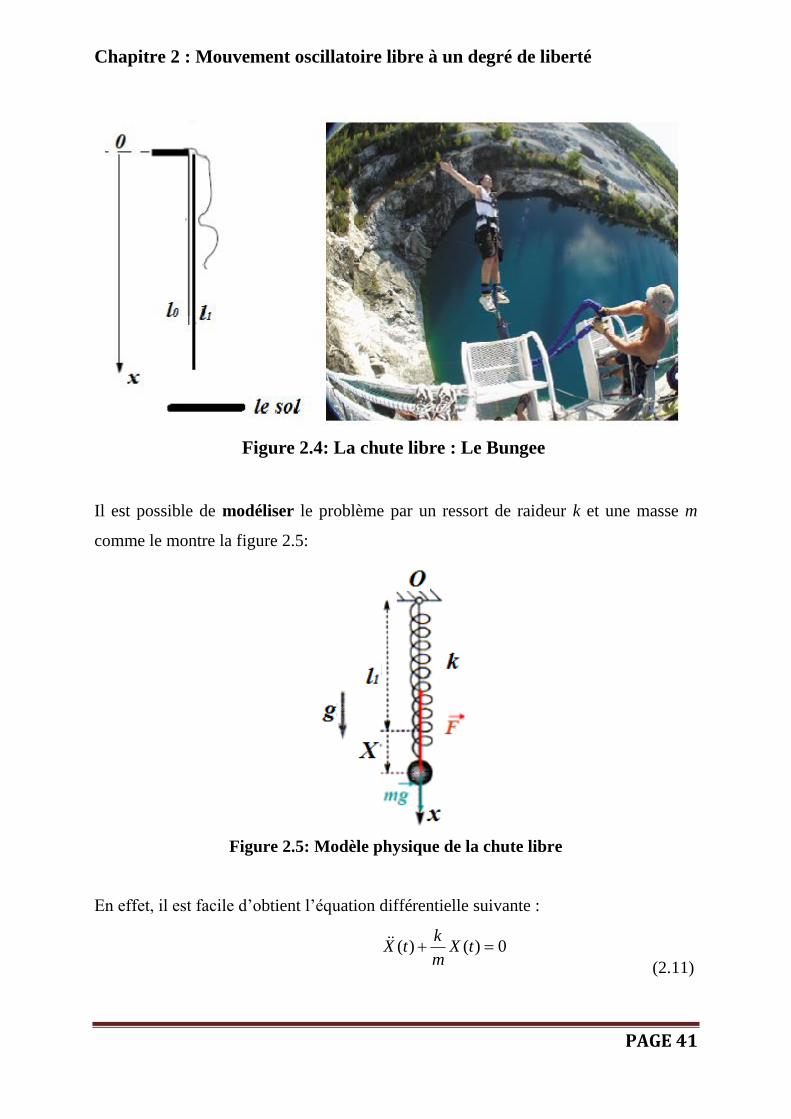
2.4.1 La chute libre (Le Bungee ):
Le saut à l'élastique, aussi appelé benji, bungie, bungy jumping ou encore bungee, est
une activité ludique et sportive de plein air qui consiste à se jeter dans le vide avec une
corde élastique accrochée aux chevilles ou au torse, destinée à ralentir puis stopper la
chute. L’objectif visé est de restituer les sensations "fortes" ressenties lors d'une chute
libre.
On considère un fil élastique de longueur l en équilibre. Lors de la chute libre le fil
s’allonge jusqu’à la longueur l1 telle que la nouvelle position est y(t) ; comme le
montre la figure 2.4:
Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 41
Figure 2.4: La chute libre : Le Bungee
Il est possible de modéliser le problème par un ressort de raideur k et une masse m
comme le montre la figure 2.5:
Figure 2.5: Modèle physique de la chute libre
En effet, il est facile d’obtient l’équation différentielle suivante :
0)()( tXm
ktX
(2.11)
Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 42
A l’équilibre on a :
k
mgll 1
Avec les conditions suivantes initiales
000
0
2)0(
)0(0
glvetvX
lXetlxt
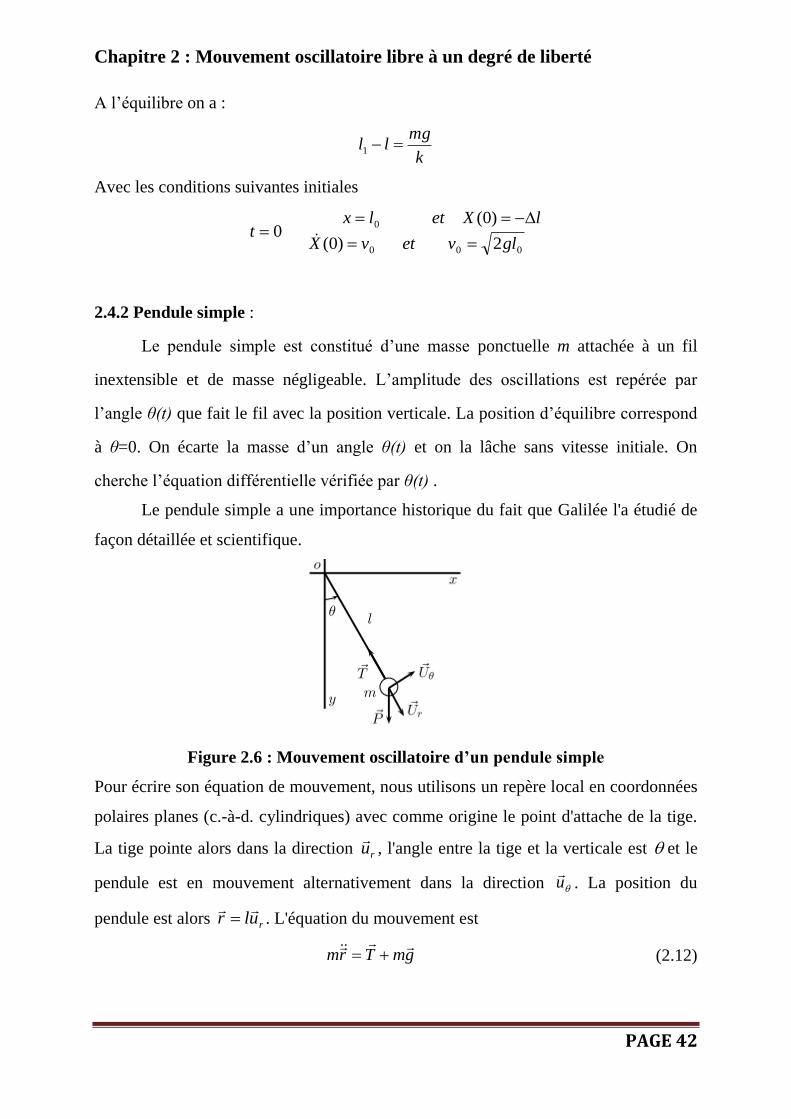
2.4.2 Pendule simple :
Le pendule simple est constitué d’une masse ponctuelle m attachée à un fil
inextensible et de masse négligeable. L’amplitude des oscillations est repérée par
l’angle θ(t) que fait le fil avec la position verticale. La position d’équilibre correspond
à θ=0. On écarte la masse d’un angle θ(t) et on la lâche sans vitesse initiale. On
cherche l’équation différentielle vérifiée par θ(t) .
Le pendule simple a une importance historique du fait que Galilée l'a étudié de
façon détaillée et scientifique.
Figure 2.6 : Mouvement oscillatoire d’un pendule simple
Pour écrire son équation de mouvement, nous utilisons un repère local en coordonnées
polaires planes (c.-à-d. cylindriques) avec comme origine le point d'attache de la tige.
La tige pointe alors dans la direction ru
, l'angle entre la tige et la verticale est et le
pendule est en mouvement alternativement dans la direction u
. La position du
pendule est alors rulr
. L'équation du mouvement est
gmTrm
(2.12)
Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 43
Rappelons que les vecteurs unitaires ru
et u
s'écrivent dans le système de
coordonnées cartésiennes comme
jiur
cossin
(2.13)
et
jiu
sincos
(2.14)
D’autre part, on a
ul
dt
udlr r
(2.15)
et
rululr 2
(2.16)
Aussi, on a
ruTT
(2.17)
et
uumggm r
sincos (2.18)
Par identification, deux équations différentielles apparaissent
cos
sin22 mgTml
mgml
(2.19)
Il faut souligner que le mouvement oscillatoire du pendule simple est régi par le
moment de rappel
)( mgl .
La deuxième des deux équations ci-haut n'est donc pas immédiatement utile, alors que
la première peut s'écrire comme suit:
0sin l
g (2.20)
C’est une équation différentielle du second ordre non linéaire à coefficients constants.
Il est possible d’obtenir cette même équation de mouvement en utilisant le formalisme
de Lagrange.

Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 44
En effet, l’énergie cinétique du pendule simple s’écrit :
222c ml
2
1mv
2
1E
(2.21)
et l’énergie potentielle s’exprime:
cosmglEp
(2.22)
ce qui permet d’écrire le Lagrangien du système sous la fomre:
cosmglml2
1EEL 22
pc
(2.23)
L’équation différentielle du mouvement s’écrit :
sinmglL
mlL
0L
)L
(dt
d 2
(2.24)
Ce qui après réarrangement, donne
0sin l
g (2.25)
Dans la limite de petites oscillations on a :
sin
Finalement l’équation du mouvement devient:
0)( tl
gt (2.26)
dont la solution, appelée équation horaire, est de la forme :
)cos()( 0 tAt
(2.27)
où l
g0
est la pulsation propre du mouvement dont l’expression est indépendante
de l’amplitude. C’est une caractéristique des oscillateures dit isochrone.
A
et
sont des constantes à définir par les conditions initiales.

Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 45
2.4.3 Oscillation non linéaire:
Cependant, pour des amplitudes assez grandes, la pulsation n’est plus indépendante de
l’amplitude du mouvement. Pour la calculer, on fait un bilan énergétique tout en
profitant de la conservation de l’énergie totale du système (elle est la même en tout
point de la trajectoire). En effet,
teconsmglmlEEE pcT tancos2
1 22
(2.28)
Figure 2.7: Mouvement oscillatoire du pendule simple pour les
grandes amplitudes
On choisit deux points particuliers sur le chemin de la masse : le point à partir duquel
on lâche la masse sans vitesse initiale
00
et auquel correspond l’énergie totale
lT mglE cos
(2.29)
et un point quelconque du chemin auquel corrspond l’énergie totale suivante :
cos2
1 22 mglmlET
(2.30)
Les deux expressions sont donc égales, ce qui donne
lmglml coscos2
1 22
ou encore
)cos(cos2 2
0
2
l
(2.31)

Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 46
Avec
dt
dtet
l
g )(2
0
On obtient alors :
l
l
l
l
T
ddt
)cos(cos2
2
0
0
(2.32)
Après calcul, on obtient :
l
l l
l dT
2sin
2sin
2
1
222
0
(2.33)
En introduisant le changement variable suivant :
2sinsin
2sin l
On trouve alors :
2
0 22
0
sin2
sin14
l
l dT
(2.34)
L’intégrale de cette formule est régulière et se prête aux développements en série.
On trouve après calcul la formule de la période de grandes amplitudes donnée comme
suit :
..
161
2
0l
l TT
(2.35)
Cette expression est appellée la formule de BORDA.
2.4.4 Pendule pesant :
On appelle pendule pesant tout solide mobile de masse M autour d'un axe (en
principe horizontal) ne passant pas par son centre de gravité et placé dans un champ de
pesanteur (voir la figure 2.8). Déplacé de sa position d'équilibre (stable) dans laquelle

Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 47
le centre de gravité est à la verticale de l'axe, le solide se met à osciller de part et
d'autre de cette position dite d'équilibre.
Quelques exemples dans la pratique quotidienne constituent des pendules
pesants : un balancier d'horloge, une balançoire, etc. Le pendule simple est le cas
particulier du pendule pesant.
Figure 2.8: Mouvement oscillatoire du pendule pesant
Pour un pendule pesant quelconque, l'effet de l'inertie sur la rotation ne peut pas
être ramenée à une masse ponctuelle placée au centre de gravité. C’est l'ensemble du
solide qui tourne, et son inertie est caractérisée par son moment d'inertie par rapport à
l’axe de rotation (trace en O ) noté OI et la distance L0 du centre de gravité à l'axe de
rotation.
Si la seule force externe en présence provient d'un champ gravitationnel uniforme g
,
alors le couple total s'exerçant sur le système est
1i
ii gmr
(2.36)
où ir
et im sont le vecteur position par rapport à l’origine et la masse d’un élément de
la grande masse M du pendule pesant.

Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 48
Puisque le vecteur g
est le même partout sur la masse M, on peut écrire
grmi
ii
1
gRM cm
(2.37)
où cmR
est le vecteur position du centre de masse par rapport à l'axe de rotation.
Autrement dit, la gravité produit un couple sur l'objet comme si toute la masse de
l'objet était concentrée en son centre de masse. Ceci n'est valable que parce que le
champ gravitationnel est le même partout dans l'objet. Autrement dit, pour fins de
calcul du couple, on peut considérer que la force gravitationnelle agit à la position du
centre de masse, pourvu que g
soit uniforme.
La grandeur de ce couple, par rapport au pivot (axe des z sortant de la page), est donc
sin0MgLz (2.38)
où est l'angle d'inclinaison entre la verticale et la position du centre de masse par
rapport au pivot. La composante zJ du moment cinétique évaluée au pivot O est
donnée par :
Oz IJ (2.39)
où OI est le moment d’inertie de la masse M par rapport au point de pivot O , qui,
selon le théorème de Huygens (Steiner), est égal à
2
0MLII GO (2.40)
où GI est le moment d’inertie de la masse M par rapport à son centre de masse G .
L'équation du mouvement est donnée par
zz
dt
dJ (2.41)
ou encore
sin0MgLIO (2.42)
Ce qui donne
sin0
OI
MgL (2.43)
Ce résultat peut être obtenu en utilisant le formalisme de Lagrange.
Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 49
En effet, l’énergie cinétique est donnée par :
2
2
1Oc IE
(2.44)
alors que l’énergie potentielle s’écrit :
mgzE p
(2.45)
où :
)cos1(0 Lz
(2.46)
Le Lagrangien est alors égal à:
)cos1(2
10
2 mgLIEEL Opc
(2.47)
L’équation différentielle du mouvement du système est écrite comme suit :
00 2
00
OI
mgL (2.48)
La pulsation propre est indépendante de l’amplitude est égale à :
OI
mgL02
0
La solution de l’équation différentielle a la forme :
)cos()( 0 tAt
(2.49)
2.4.5 Pendule de torsion :
Un corps rigide de moment d’inertie 0J
oscille autour d’un axe avec une constante de
Torsion tk
(voir figure 2.9). L’énergie cinétique s’écrit :
20c J
2
1E (2.50)
L’énergie potentielle est donnée par:
2tp k
2
1E
(2.51)

Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 50
Figure 2.9: Mouvement oscillatoire de torsion
Le Lagrangien du système s’écrit alors:
2t
20pc k
2
1J
2
1EEL
(2.52)
L’équation différentielle du mouvement du système s’écrit :
t0 kL
JL
0L
)L
(dt
d
d’où :
0)(0
tJ
kt (2.53)
La pulsation propre s’écrit alors :
0
t20
J
k (2.54)
La solution de l’équation différentielle est de la forme :
)tcos(A)t( 0
(2.55)
Quelques exemples d’applications qui décrivent les oscillations de torsion reportés
dans la figure 2.10

Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 51
Figure 2.10: Mouvement oscillatoire de torsion
du pont de Tacoma aux U.S.A –Le 7 novembre 1940.
2.5 Oscillations électriques
On considère un circuit (Lind, Cap) parcouru par un courant i(t) représenté par la figure
comme suit :
Figure 2.11: Circuit (Lind, Cap) oscillant.
D’après la loi des mailles du Kirchhoff , le bilan de tension s’écrit comme suit :
0)()(
ap
indC
tq
dt
tdiL
(2.56)
Sachant que le courant i(t) pendant un temps dt apporte une charge dq tel que :
dt
tdqti
)()(
On obtient alors l’équation différentielle du mouvement comme suit :

Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 52
0)(
)( ap
indC
tqtqL
(2.57)
On remarque que cette équation est équivalente à l’équation d’un mouvement
oscillatoire harmonique.
0)()(0)(
)( txm
ktx
CL
tqtq
apind
(2.58)
On obtient ainsi la pulsation propre et la période propre comme suit :
apind
pind
CLTetCL
21
0
2
0
La solution générale de l’équation s’écrit alors:
)cos()( 0 tAtq
(2.59)
En faisant l’analogie entre le système mécanique et le système électrique, on aura :
kc
1
)t(x)t(q
mL
ap
ind
Il faut retenir que :
L’oscillation harmonique est régie par
0)()( 2
0 tqtq
La solution de cette équation différentielle est de la forme :
)sin()cos()( 0201 tAtAtq
La période propre T0 est donnée comme suit :
0
0
2T
où ω0 est la pulsation propre du système.
Il faut signaler que l’énergie totale du système conservatif est
constante dans le temps.
Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 53
Applications
Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 54
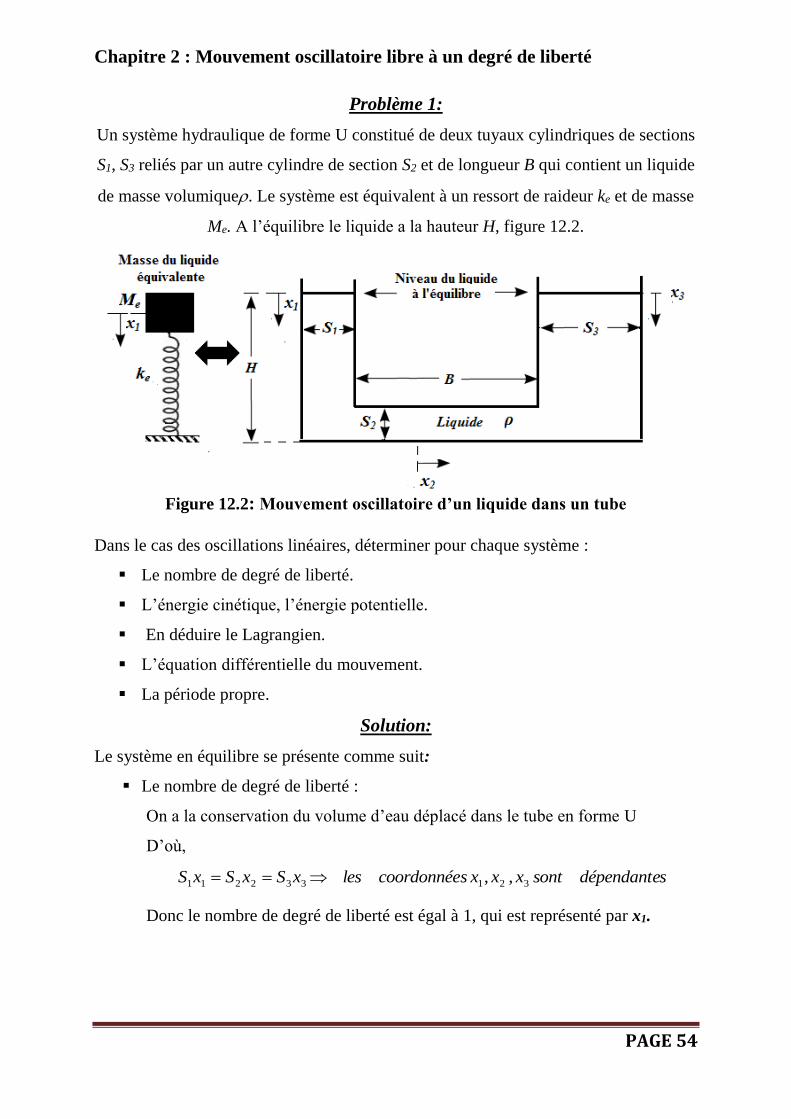
Problème 1:
Un système hydraulique de forme U constitué de deux tuyaux cylindriques de sections
S1, S3 reliés par un autre cylindre de section S2 et de longueur B qui contient un liquide
de masse volumique. Le système est équivalent à un ressort de raideur ke et de masse
Me. A l’équilibre le liquide a la hauteur H, figure 12.2.
Figure 12.2: Mouvement oscillatoire d’un liquide dans un tube
Dans le cas des oscillations linéaires, déterminer pour chaque système :
Le nombre de degré de liberté.
L’énergie cinétique, l’énergie potentielle.
En déduire le Lagrangien.
L’équation différentielle du mouvement.
La période propre.
Solution:
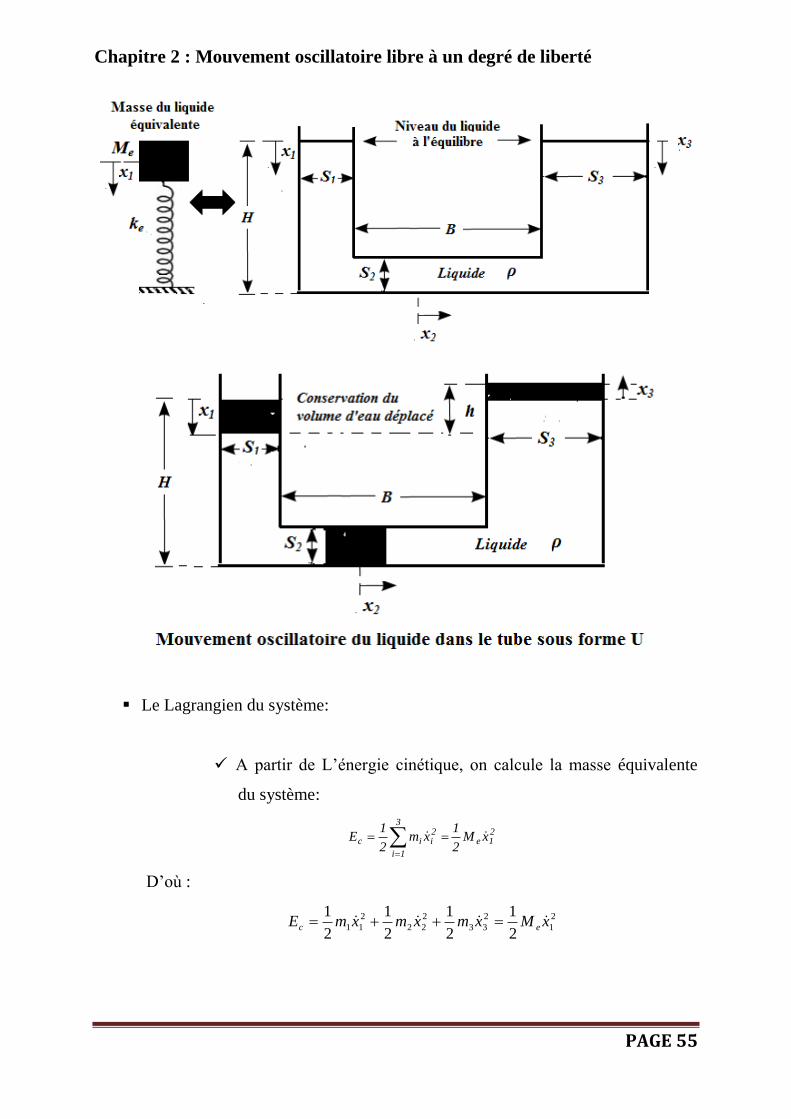
Le système en équilibre se présente comme suit:
Le nombre de degré de liberté :
On a la conservation du volume d’eau déplacé dans le tube en forme U
D’où,
sdépendantesontxxxscoordonnéelesxSxSxS 321332211 ,,
Donc le nombre de degré de liberté est égal à 1, qui est représenté par x1.
Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 55
Le Lagrangien du système:
A partir de L’énergie cinétique, on calcule la masse équivalente
du système:
21e
3
1i
2iic xM
2
1xm
2
1E
D’où :
2
1
2
33
2
22
2
112
1
2
1
2
1
2
1xMxmxmxmE ec

Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 56
Avec
332211
2
1
3
1
2
11
2
1
,,
)1(
HSmBSmHSm
et
xMS
S
S
S
H
BHSx e
Après l’identité, on déduit la masse équivalente du système comme suit :
)1(3
1
2
11
S
S
S
S
H
BHSM e
On calcule la constante de rappelle à partir de l’énergie
potentielle, on a alors :
PSxkFxkE eep 11
2
12
1
Avec
h
xxgSF )( 311
D’ou
1
3
11 )1( x
S
SgSF
Après l’identité, on détermine la constante de raideur équivalente
du système comme suit :
)1(3
11
S
SgSke
Le Lagrangien du système s’écrit alors :
21e
21e
1i
2ii
2ii
1i
pc
xk2
1xM
2
1xk
2
1xm
2
1L
EEL
L’équation différentielle est de la forme :
0)(0)()( 1
2
0111 txxtxM
kx
e
e
La pulsation propre ω0 est égale à :
Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 57
)1(
)1(
3
1
2
1
3
1
2
0
S
S
S
S
H
BH
S
Sg
M
k
e
e
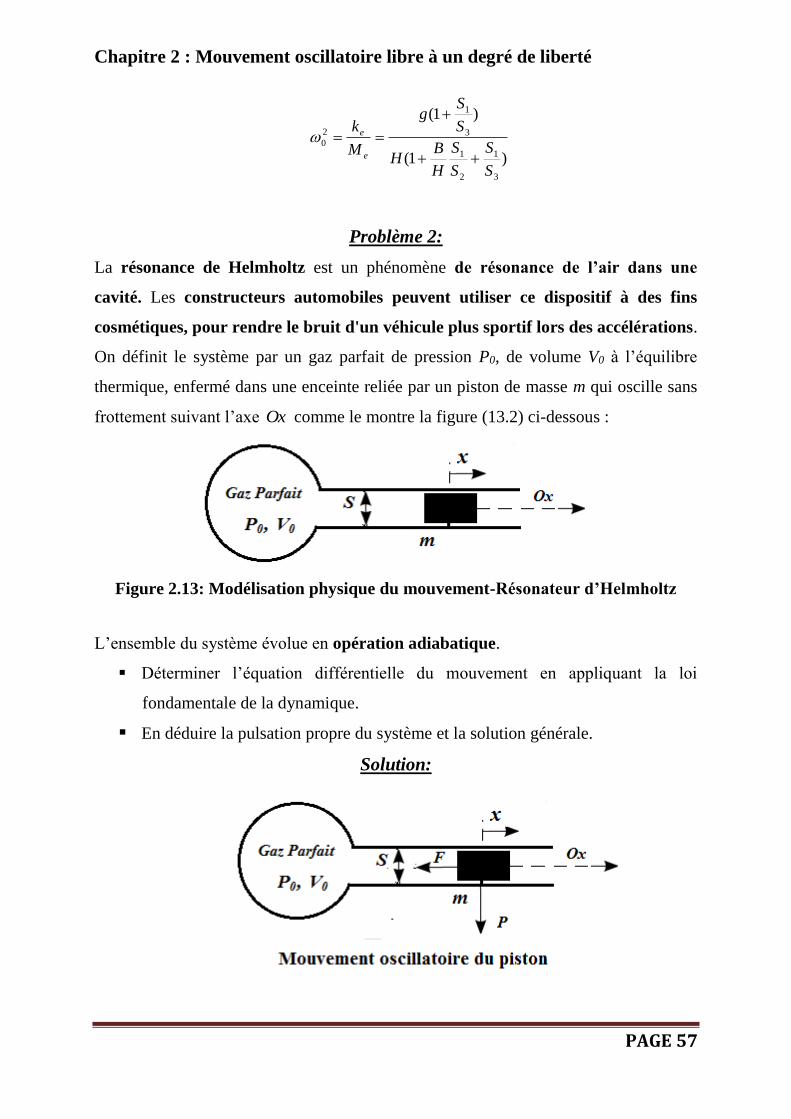
Problème 2:
La résonance de Helmholtz est un phénomène de résonance de l’air dans une
cavité. Les constructeurs automobiles peuvent utiliser ce dispositif à des fins
cosmétiques, pour rendre le bruit d'un véhicule plus sportif lors des accélérations.
On définit le système par un gaz parfait de pression P0, de volume V0 à l’équilibre
thermique, enfermé dans une enceinte reliée par un piston de masse m qui oscille sans
frottement suivant l’axe Ox comme le montre la figure (13.2) ci-dessous :
Figure 2.13: Modélisation physique du mouvement-Résonateur d’Helmholtz
L’ensemble du système évolue en opération adiabatique.
Déterminer l’équation différentielle du mouvement en appliquant la loi
fondamentale de la dynamique.
En déduire la pulsation propre du système et la solution générale.
Solution:

Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 58
En appliquant la méthode des forces on obtient :
1i
rapixmPS
Ox:SuramFPamF
Puisque l’opération est adiabatique, on a:
SxV
PP
V
V
P
PtetanconscPV
0
0
00
L’équation différentielle s’écrit alors :
0xx0x)mV
SP(x 2
00
20
La pulsation propre est de la forme :
mV
SP
0
2
02
0
La solution générale est de la forme:
)tcos(A)t(x 0
Problème 3 :
Calculer la pulsation d'oscillation du système mécanique constitué d’une plaque
de masse M et de longueur L (sa largeur est très petite devant sa longueur)
pivotant autour d'un axe passant par son extrémité.
Figure 2.14: Plaque oscillante
Solution:
Rappelons que si la seule force externe en présence provient d’un champ
gravitationnel uniforme g, alors le couple total s’exerçant sur un pendule réel
est donné par :
gRMM cmo
/

Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 59
où cmR
est le vecteur position du centre de masse par rapport à l’axe de
rotation. Par projection sur l’axe Oz, considéré normal à la page, on obtient :
sin2
LMgM z
Ce moment de force donne lieu à une variation dans le temps du moment
cinétique du système donné par :
0IJ z
où 0I est le moment d’inertie de la plaque par rapport à l’axe de rotation,
donné par :
2
02
LMII G
où GI est le moment d’inertie de la plaque par rapport à son centre de masse
donné par :
. 2
12
1MLIG
Le calcul donne enfin
2
03
1MLI
L’équation du mouvement s’écrit donc :
sin23
1 2 LMgMLM
dt
dJz
z
où encore
0sin2
3
L
g
On peut faire l’approximation des faibles oscillations et remplacer sin par ;
ce qui débouche sur l’équation du mouvement linéaire suivante:
02
3
L
g
et la pulsation propre du système s‘écrit
L
g
2
30
Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 60
Problème 4:
Une masse ponctuelle m est astreinte à se déplacer sur une courbe dans un plan
vertical d’équation
2axy
1- Énumérer les contraintes appliquées sur le mouvement de la masse.
2- En déduire le nombre de degré de liberté du système, et la coordonnée
généralisée correspondante.
3- Calculer les énergies cinétique et potentielle du système, et en déduire le
Lagrangien du système.
4- Écrire l'équation différentielle de son mouvement, en supposant les
frottements négligeables.
5- Faire l'approximation des déplacements de faibles amplitudes pour linéariser
cette équation et la résoudre.
6- Donner alors la période de ce mouvement.
Solution:
Puisque la masse se déplace dans le plan Oxy , sa coordonnée suivant z est constante.
C'est une première contrainte.
Les coordonnées x et y sont reliées par la fonction 02 axy , ce qui représente une
seconde contrainte.
Le système peut être représenté par 3 coordonnées cartésiennes, avec deux contraintes.
On dit donc que le système est 1 degré de liberté. On peut choisir la coordonnée
cartésienne x comme coordonnée généralisée.
Le Lagrangien du système s'écrit donc:
2222412
1mgaxxxamUTL
Puisque le système est libre (sans frottement ni force extérieure), l'équation d'Euler-
Lagrange pour une seule coordonnée généralisée x s'écrit:
0
x
L
x
L
dt
d
Aprés dérivation, on trouve
02441 2222 mgaxxxmaxxam

Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 61
Pour des oscillations de trés faibles amplitudes (x petit), on pourrait négliger les termes
d'ordre supérieur à 2dans l'équation différentielle, qui devient alors linéaire:
02 mgaxxm
La solution se présente sous la forme:
tCtx 0cos
où C et sont des constantes à définir par les conditions initiales, et
ga20
la pulsation propre du système. La période propre du système est donné par :
gaT
2
22
0
0
Problème 5:
Soient les systèmes mécaniques constitués par une tige de masse négligeable, de
longueur l reliée par un ressort de raideur k représentés dans la figure 13.2 : A-B-C
comme suit:
Figure 2.16: Couplage pendule ressort
Pour des petites oscillations, déterminer pour chaque système de la figure (13.2):
Le Lagrangien.
L’équation différentielle du mouvement.
La pulsation propre et la solution générale.
Interpréter les résultats.

Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 62
Solutions:
Système A :
Pour les faibles oscillations, on a la relation suivante :
ax
Les deux variables x, θ sont linéairement indépendant, d’où le nombre de degré de
liberté est égale à 1, représenté par la variable θ
L’énergie cinétique :
On calcule le vecteur de position et la vitesse de la masse m :
sinly
coslxmoV
cosly
sinlxmo m
L’énergie cinétique s’écrit :
222mc ml
2
1mV
2
1E
L’énergie potentielle s’exprime comme suit :
axaveccosmglkx2
1E 2
p
Le Lagrangien s’écrit alors :
cosmgl)a(k2
1ml
2
1EEL 222
pc
Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 63
L’équation différentielle du mouvement est :
0)ml
mglka(0
L)
L(
dt
d2
2
La pulsation propre est égale à :
2
22
0ml
mglka
La solution générale est de la forme:
)tcos(A)t( 0
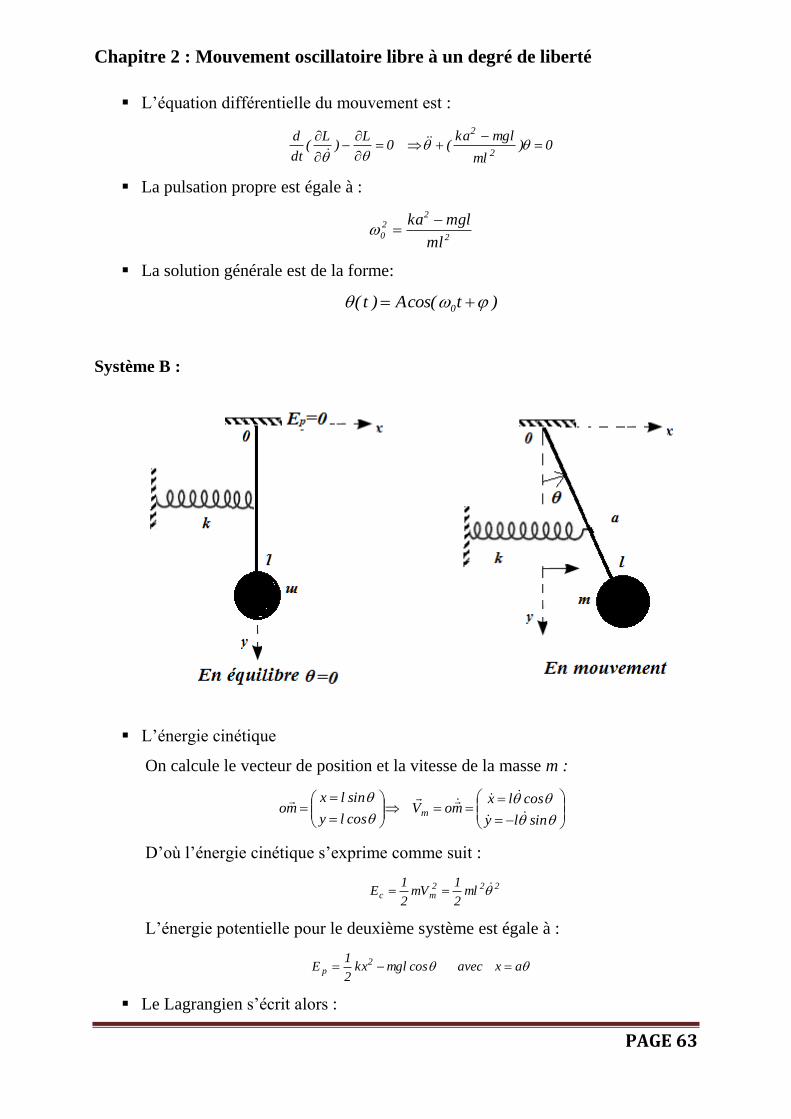
Système B :
L’énergie cinétique
On calcule le vecteur de position et la vitesse de la masse m :
sinly
coslxmoV
cosly
sinlxmo m
D’où l’énergie cinétique s’exprime comme suit :
222mc ml
2
1mV
2
1E
L’énergie potentielle pour le deuxième système est égale à :
axaveccosmglkx2
1E 2
p
Le Lagrangien s’écrit alors :
Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 64
cosmgl)a(k2
1ml
2
1EE),(L 222
pc
L’équation différentielle du mouvement est :
0)ml
mglka(0
L)
L(
dt
d2
2
La pulsation propre est :
2
220
ml
mglka
La solution générale est de la forme:
)tcos(A)t( 0
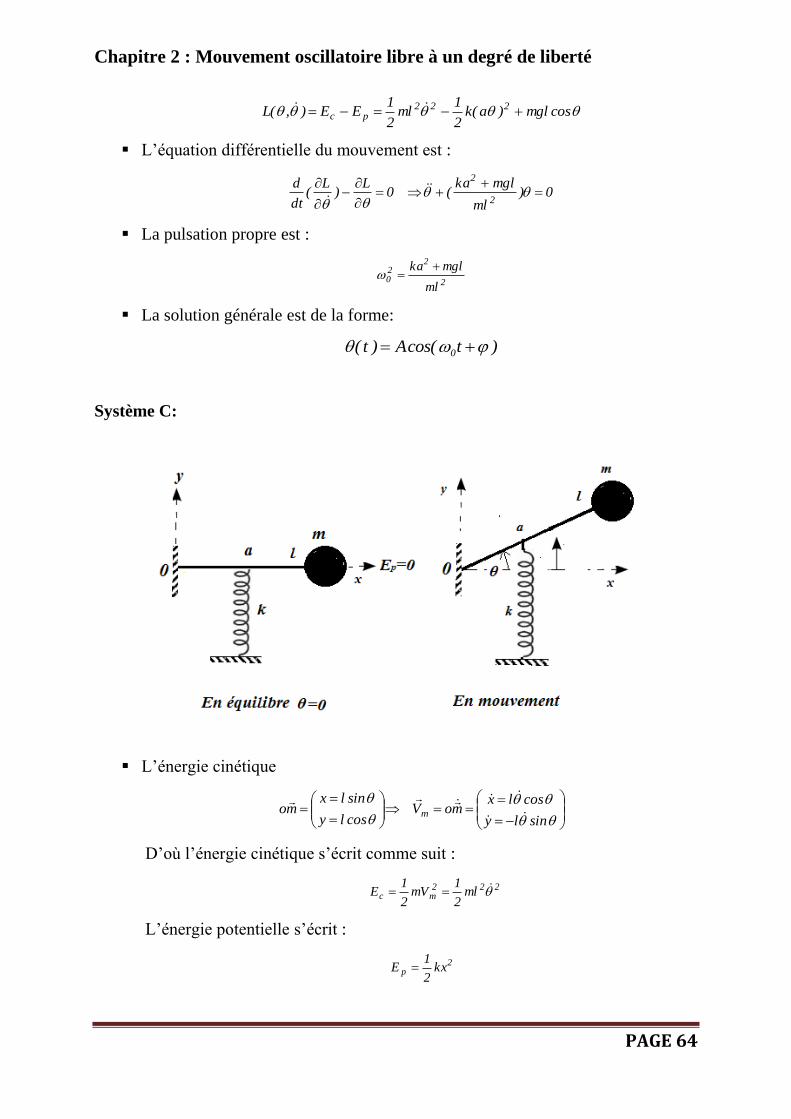
Système C:
L’énergie cinétique
sinly
coslxmoV
cosly
sinlxmo m
D’où l’énergie cinétique s’écrit comme suit :
222mc ml
2
1mV
2
1E
L’énergie potentielle s’écrit :
2p kx
2
1E

Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 65
Le Lagrangien s’écrit alors :
222pc )sina(k
2
1ml
2
1EEL
L’équation différentielle du mouvement est :
0ml
ka0
L)
L(
dt
d2
2
La pulsation propre est :
2
220
ml
ka
La solution générale est de la forme:
)tcos(A)t( 0
Problème 6:
Le fléau est un instrument agricole utilise pour le battage des céréales. On
modélise le système par une tige métallique de masse négligeable, de longueur l
portant deux masses m et M, tournant sans frottement autour de son axe au point fixe
O comme le montre la figure 14.2. A l’équilibre la barre est horizontale.
Figure 2.17: Modèle physique du Fléau
Déterminer dans le cas des petites oscillations:
Le Lagrangien du système
L’équation différentielle du mouvement,
La pulsation propre et la période propre.

Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 66
La solution générale avec les conditions initiales suivantes :
0)0( t et 0)0( t
Application numérique :
On prend : m=M=1Kg, k=20N/m
Solution:
Le Lagrangien :
On a les déplacements infinitésimaux comme suit :
dépandantssontx,x4
l3x,
4
lx 2121
On a donc un seul degré de liberté représenté par θ(t).
L’énergie cinétique s’exprime :
4
l3x,
4
lxavec)l
4
3(M
2
1)l
4
1(m
2
1xM
2
1xm
2
1E 21
2222
21c
L’énergie potentielle s’écrit :
22p )
4
l(k
2
1)
4
l(k
2
1E
Le Lagrangien s’écrit alors :
222pc )
4
l(k)l
4
3(M
2
1)l
4
1(m
2
1EEL
D’où :
222
)4
l(k)mM9(
16
l
2
1),(L
L’équation différentielle du mouvement :
0M9m
k20
L)
L(
dt
d
Respectivement, la pulsation propre ω0 et la période propre T0 sont de la
forme :
M9m
k2
2Tet
M9m
k2O
20
La solution générale est de la forme:
)tcos(A)t( 0
Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 67
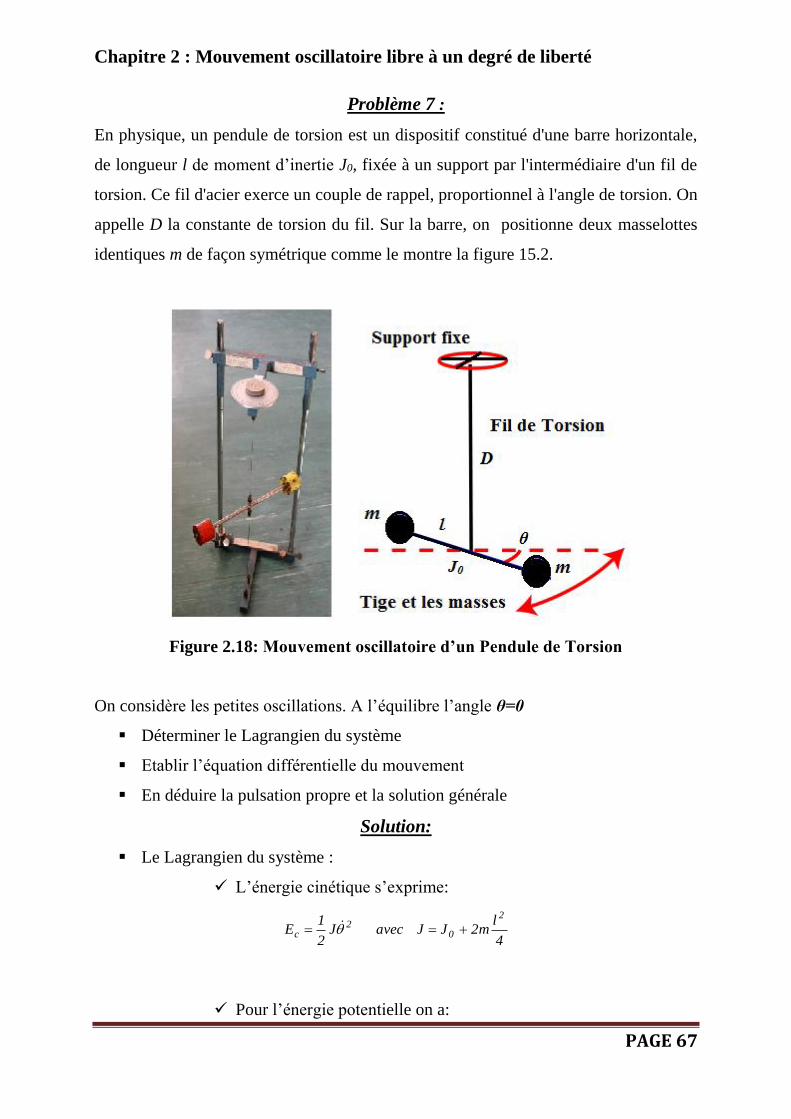
Problème 7 :
En physique, un pendule de torsion est un dispositif constitué d'une barre horizontale,
de longueur l de moment d’inertie J0, fixée à un support par l'intermédiaire d'un fil de
torsion. Ce fil d'acier exerce un couple de rappel, proportionnel à l'angle de torsion. On
appelle D la constante de torsion du fil. Sur la barre, on positionne deux masselottes
identiques m de façon symétrique comme le montre la figure 15.2.
Figure 2.18: Mouvement oscillatoire d’un Pendule de Torsion
On considère les petites oscillations. A l’équilibre l’angle θ=0
Déterminer le Lagrangien du système
Etablir l’équation différentielle du mouvement
En déduire la pulsation propre et la solution générale
Solution:
Le Lagrangien du système :
L’énergie cinétique s’exprime:
4
lm2JJavecJ
2
1E
2
02
c
Pour l’énergie potentielle on a:

Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 68
2p D
2
1E
Le Lagrangien s’écrit alors :
22
2
1
2
1),( DJEEL pc
L’équation du mouvement est de la forme:
0)(00)( 2
0
t
J
DLL
dt
d
La pulsation propre est égale à :
J
D20
La solution générale est de la forme :
)tcos(A)t( 0
Problème 8 :
Soit un disque de masse M, de moment d’inertie J lié par deux ressorts, l’un au centre
O, l’autre au point A distant de (R/2) du point O se glissant sans frottement suivant
l’axe Ox comme le montre la figure 16.2 :
Figure 2.19: Mouvement oscillatoire d’un disque
Etablir le Lagrangien du système.
Déterminer l’équation différentielle du mouvement
En déduire la pulsation propre du système ainsi que la solution générale
Solution:
Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 69
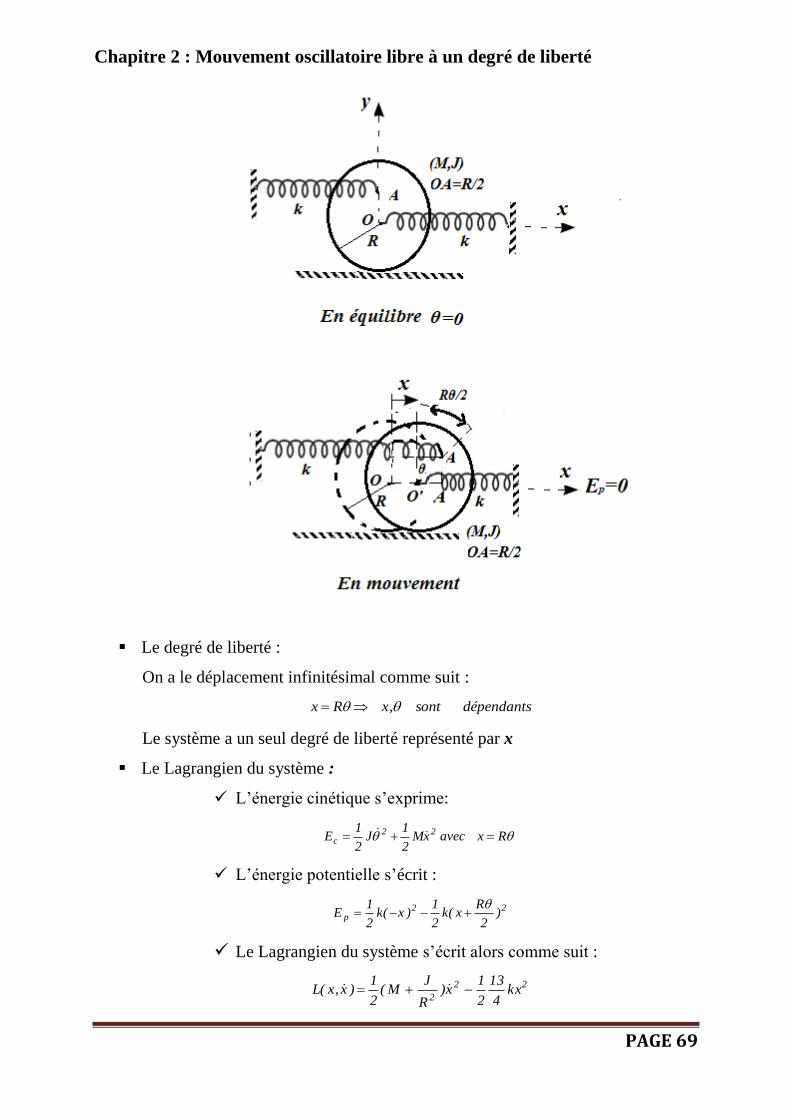
Le degré de liberté :
On a le déplacement infinitésimal comme suit :
dépendantssont,xRx
Le système a un seul degré de liberté représenté par x
Le Lagrangien du système :
L’énergie cinétique s’exprime:
RxavecxM2
1J
2
1E 22
c
L’énergie potentielle s’écrit :
22p )
2
Rx(k
2
1)x(k
2
1E
Le Lagrangien du système s’écrit alors comme suit :
22
2kx
4
13
2
1x)
R
JM(
2
1)x,x(L
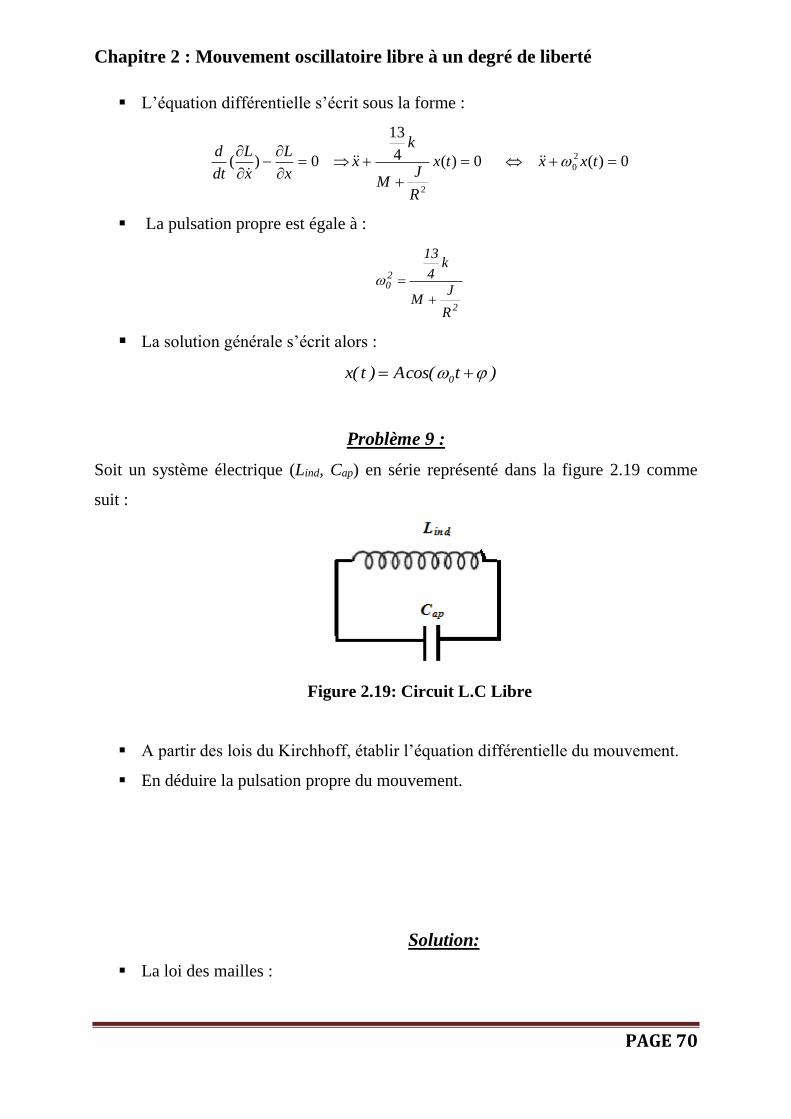
Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 70
L’équation différentielle s’écrit sous la forme :
0)(0)(4
13
0)( 2
0
2
txxtx
R
JM
k
xx
L
x
L
dt
d
La pulsation propre est égale à :
2
20
R
JM
k4
13
La solution générale s’écrit alors :
)tcos(A)t(x 0
Problème 9 :
Soit un système électrique (Lind, Cap) en série représenté dans la figure 2.19 comme
suit :
Figure 2.19: Circuit L.C Libre
A partir des lois du Kirchhoff, établir l’équation différentielle du mouvement.
En déduire la pulsation propre du mouvement.
Solution:
La loi des mailles :

Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 71
indLap
L
i
i jLZavec0C
q)t(iZ0V
indind
D’où l’équation du mouvement s’écrit :
0C
q
dt
)t(diL
apind
L’équation différentielle devient alors :
dt
dq)t(iavec0)t(q
C
1qL
ap
ind
On a l’équivalence du système mécanique-électricité comme suit :
0)t(kxxm0)t(qC
1qL
apind
D’où :
kc
1
)t(x)t(q
mL
ap
ind
La pulsation propre du mouvement s’écrit sous la forme :
apind
2
0CL
1
Problème 10 :
Soit un ressort de constante de raideur k , de longueur au repos b , et un point matériel
de masse m (voir figure 2.20). La masse est fixée à l'extrémité du ressort et peut
coulisser sans frottement sur l'axe horizontal des x .
La masse est abandonnée sans vitesse initiale à la distance a de O , tel que ba .
1- établir une équation différentielle du premier ordre relative au mouvement de la
masse.
2- calculer la période T du mouvement de la masse en fonction de a , b , m et k .
3- montrer en quoi les oscillations de la masse sont différentes de celles d'un
oscillateur harmonique.
On donne l'intégrale définie :

Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 72
311.1
sin1
2
02
0
x
dxI
Figure 2.20: Oscillateur anharmonique
Solution:
Pour une x quelconque on a :
2222
2
1
2
1xxbkxmET
pour ax on a 0x et
222
2
1aabkET
Puisque l'énergie totale est supposée conservée, on écrit
2222
222
2
1
2
1
2
1aabkxxbkxm
Puisque ba et donc bx , on peut faire l'approximation suivante
b
ab
b
abab
2
111
2
22
Ce qui est aussi vrai pour 22 xb .
Après réarrangement on trouve
042
1
2
1442
2
b
a
b
xkbxm
Ou encore
44
2
2
4
1xa
m
k
bx

Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 73
Ce qui permet d’écrire
44
2
1xa
m
k
bdt
dx
On inverse l’équation ci-dessus
44
12
xak
mb
dx
dt
On fait l'intégration 4
0T
t et 0 ax ; pour cela on choisit le signe moins car en
lâchant la masse du point ax la masse se déplace dans la dirction négative de l’axe
x :
a
a
T
xa
dx
k
mb
xa
dx
k
mbdt
044
0
44
4
0
22
En utilisant le changement de variable ua
xsin , on tombe sur l’équation suivante :
a
u
du
k
m
a
bT
02sin1
2
4
Ou encore, la période du mouvement
k
m
a
bT 48.10
On voit clairement que la période T dépend de l'amplitude du mouvement, a , ce qui
n'est pas le cas des oscillations harmoniques. Ce sont là des oscillations
anharmoniques.
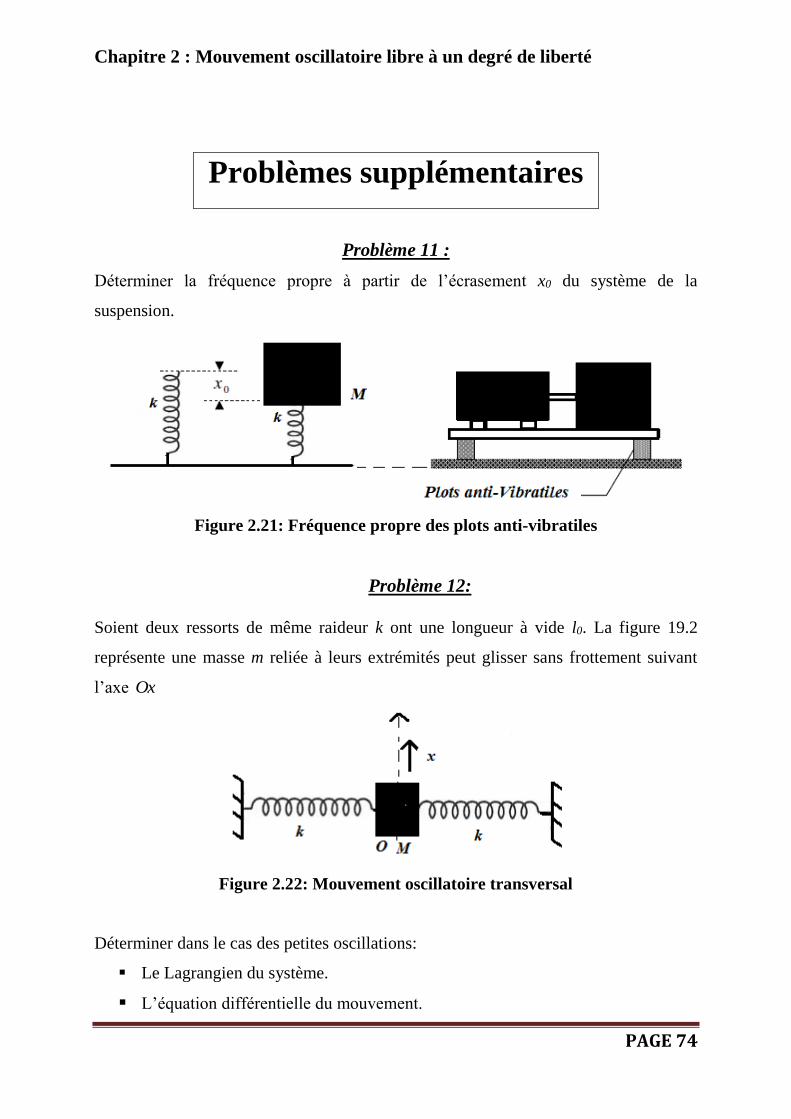
Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 74
Problèmes supplémentaires
Problème 11 :
Déterminer la fréquence propre à partir de l’écrasement x0 du système de la
suspension.
Figure 2.21: Fréquence propre des plots anti-vibratiles
Problème 12:
Soient deux ressorts de même raideur k ont une longueur à vide l0. La figure 19.2
représente une masse m reliée à leurs extrémités peut glisser sans frottement suivant
l’axe Ox
Figure 2.22: Mouvement oscillatoire transversal
Déterminer dans le cas des petites oscillations:
Le Lagrangien du système.
L’équation différentielle du mouvement.
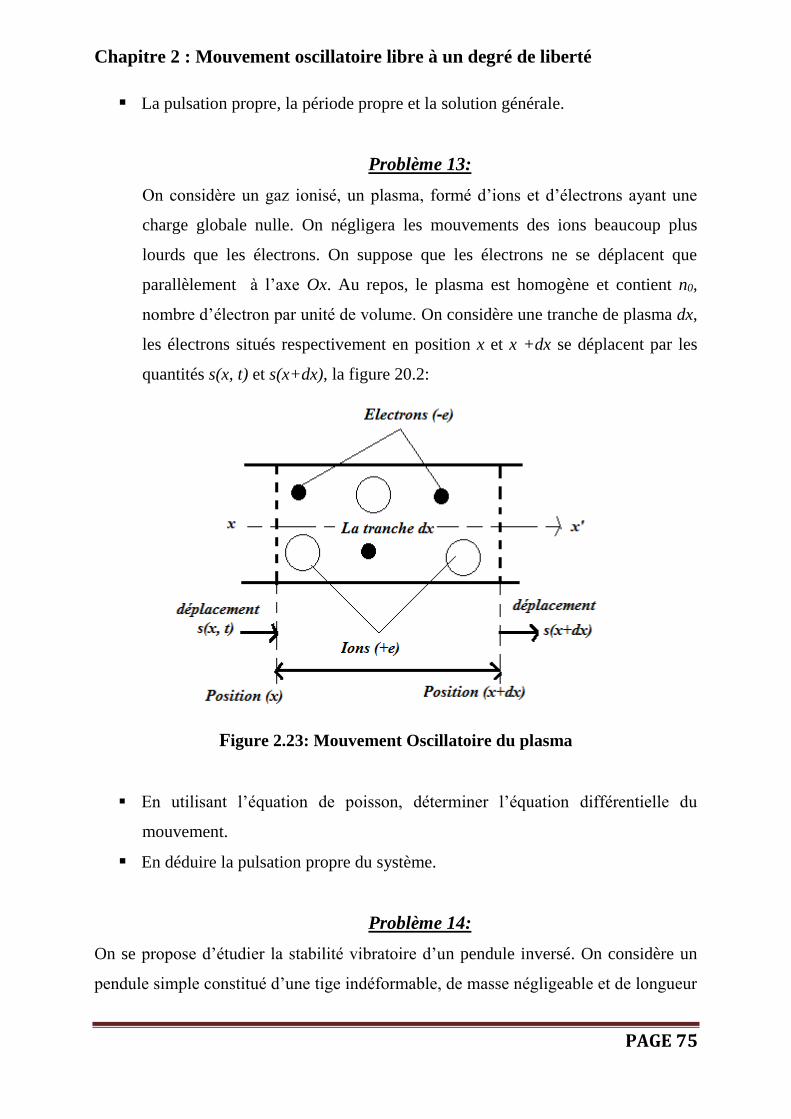
Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 75
La pulsation propre, la période propre et la solution générale.
Problème 13:
On considère un gaz ionisé, un plasma, formé d’ions et d’électrons ayant une
charge globale nulle. On négligera les mouvements des ions beaucoup plus
lourds que les électrons. On suppose que les électrons ne se déplacent que
parallèlement à l’axe Ox. Au repos, le plasma est homogène et contient n0,
nombre d’électron par unité de volume. On considère une tranche de plasma dx,
les électrons situés respectivement en position x et x +dx se déplacent par les
quantités s(x, t) et s(x+dx), la figure 20.2:
Figure 2.23: Mouvement Oscillatoire du plasma
En utilisant l’équation de poisson, déterminer l’équation différentielle du
mouvement.
En déduire la pulsation propre du système.
Problème 14:
On se propose d’étudier la stabilité vibratoire d’un pendule inversé. On considère un
pendule simple constitué d’une tige indéformable, de masse négligeable et de longueur
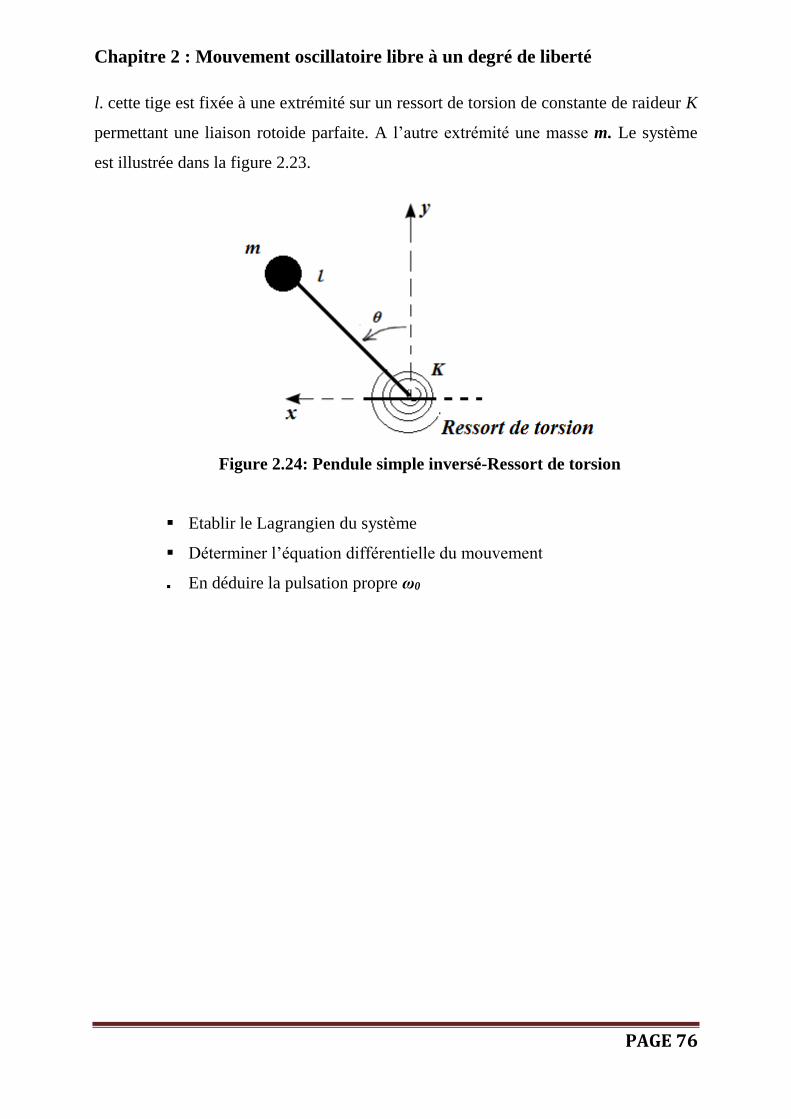
Chapitre 2 : Mouvement oscillatoire libre à un degré de liberté
PAGE 76
l. cette tige est fixée à une extrémité sur un ressort de torsion de constante de raideur K
permettant une liaison rotoide parfaite. A l’autre extrémité une masse m. Le système
est illustrée dans la figure 2.23.
Figure 2.24: Pendule simple inversé-Ressort de torsion
Etablir le Lagrangien du système
Déterminer l’équation différentielle du mouvement
En déduire la pulsation propre ω0
Chapitre 3: Mouvement oscillatoire amorti à un degré de liberté
PAGE 77
Chapitre 3 :
Mouvement amorti
à un degré de liberté
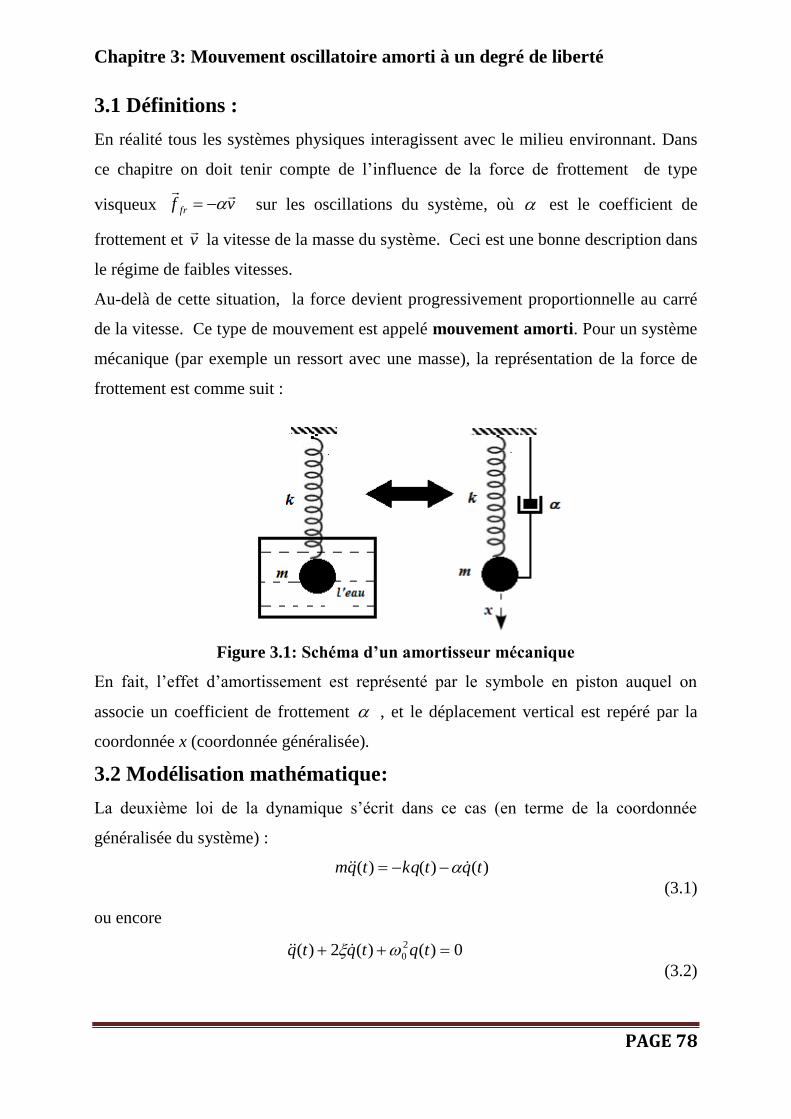
Chapitre 3: Mouvement oscillatoire amorti à un degré de liberté
PAGE 78
3.1 Définitions :
En réalité tous les systèmes physiques interagissent avec le milieu environnant. Dans
ce chapitre on doit tenir compte de l’influence de la force de frottement de type
visqueux vf fr
sur les oscillations du système, où est le coefficient de
frottement et v
la vitesse de la masse du système. Ceci est une bonne description dans
le régime de faibles vitesses.
Au-delà de cette situation, la force devient progressivement proportionnelle au carré
de la vitesse. Ce type de mouvement est appelé mouvement amorti. Pour un système
mécanique (par exemple un ressort avec une masse), la représentation de la force de
frottement est comme suit :
Figure 3.1: Schéma d’un amortisseur mécanique
En fait, l’effet d’amortissement est représenté par le symbole en piston auquel on
associe un coefficient de frottement , et le déplacement vertical est repéré par la
coordonnée x (coordonnée généralisée).
3.2 Modélisation mathématique:
La deuxième loi de la dynamique s’écrit dans ce cas (en terme de la coordonnée
généralisée du système) :
)()()( tqtkqtqm
(3.1)
ou encore
0)()(2)( 2
0 tqtqtq
(3.2)
Chapitre 3: Mouvement oscillatoire amorti à un degré de liberté
PAGE 79
Avec
m
ket
m2 2
0
où est un coefficient positif appelé facteur d’amortissement. Ceci est une équation
différentielle du second ordre homogène à coefficients constants.
On se propose une solution à l’équation différentielle sous la forme :
rtetq )(
(3.3)
où r
est une constante à définir. En remplaçant dans l’équation différentielle, on
obtient l’équation caractéristique suivante :
0)2( 2
0
2 rre rt
(3.4)
Le discriminant ’est donné par:
20
2'
(3.5)
Il existe trois types de solutions selon la valeur de ce discriminant, à savoir :
3.2.1 Cas d’un amortissement fort: 00
Dans ce cas, les solutions réelles négatives de l’équation caractéristique sont données
par:
2
0
2
2,1 r (3.6)
Ainsi, la solution générale de l’équation différentielle est la superposition des deux
solutions correspondantes à 1r et
2r , à savoir:
trtreAeAtq 21
21)( (3.7)
Où A1 et A2 sont des coefficients à déterminer par les conditions initiales :
)0(
)0(
tq
tq
Il est utile de noter que la solution ci-dessus ne contient aucun terme représentant un
mouvement d’oscillation. On dit alors que le système a un mouvement apériodique.
En effet, le système une fois lâché de sa position d’équilibre ne fait que revenir à sa
position d’équilibre sans faire d’oscillation, tellement l’amortissment appliqué est fort.
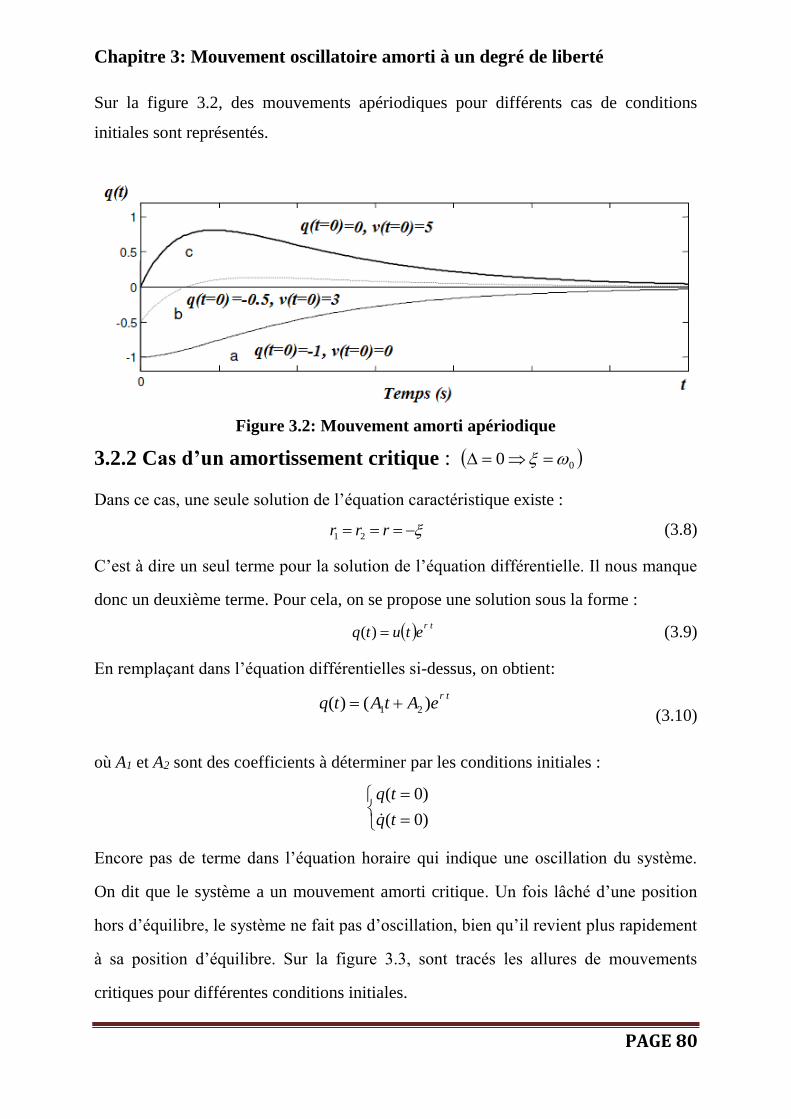
Chapitre 3: Mouvement oscillatoire amorti à un degré de liberté
PAGE 80
Sur la figure 3.2, des mouvements apériodiques pour différents cas de conditions
initiales sont représentés.
Figure 3.2: Mouvement amorti apériodique
3.2.2 Cas d’un amortissement critique : 00
Dans ce cas, une seule solution de l’équation caractéristique existe :
rrr 21 (3.8)
C’est à dire un seul terme pour la solution de l’équation différentielle. Il nous manque
donc un deuxième terme. Pour cela, on se propose une solution sous la forme :
tretutq )( (3.9)
En remplaçant dans l’équation différentielles si-dessus, on obtient:
treAtAtq )()( 21
(3.10)
où A1 et A2 sont des coefficients à déterminer par les conditions initiales :
)0(
)0(
tq
tq
Encore pas de terme dans l’équation horaire qui indique une oscillation du système.
On dit que le système a un mouvement amorti critique. Un fois lâché d’une position
hors d’équilibre, le système ne fait pas d’oscillation, bien qu’il revient plus rapidement
à sa position d’équilibre. Sur la figure 3.3, sont tracés les allures de mouvements
critiques pour différentes conditions initiales.
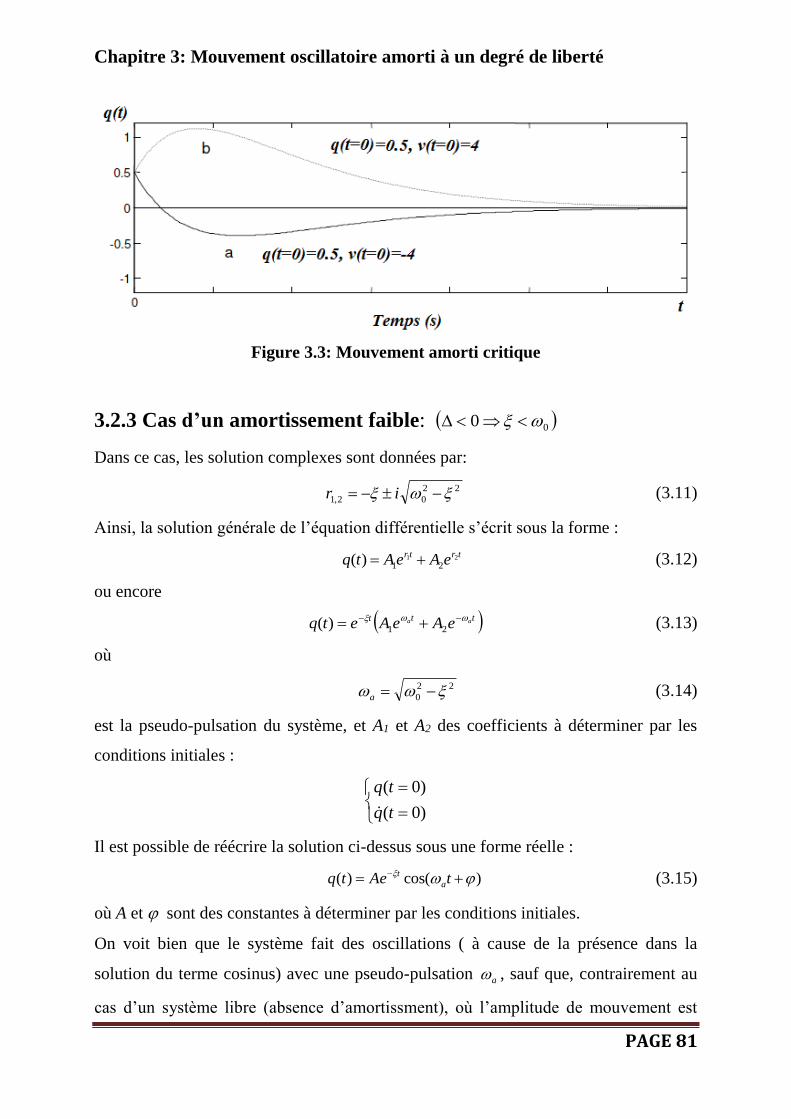
Chapitre 3: Mouvement oscillatoire amorti à un degré de liberté
PAGE 81
Figure 3.3: Mouvement amorti critique
3.2.3 Cas d’un amortissement faible: 00
Dans ce cas, les solution complexes sont données par:
22
02,1 ir (3.11)
Ainsi, la solution générale de l’équation différentielle s’écrit sous la forme :
trtreAeAtq 21
21)( (3.12)
ou encore
ttt aa eAeAetq 21)( (3.13)
où
22
0 a (3.14)
est la pseudo-pulsation du système, et A1 et A2 des coefficients à déterminer par les
conditions initiales :
)0(
)0(
tq
tq
Il est possible de réécrire la solution ci-dessus sous une forme réelle :
)cos()( tAetq a
t (3.15)
où A et sont des constantes à déterminer par les conditions initiales.
On voit bien que le système fait des oscillations ( à cause de la présence dans la
solution du terme cosinus) avec une pseudo-pulsation a , sauf que, contrairement au
cas d’un système libre (absence d’amortissment), où l’amplitude de mouvement est
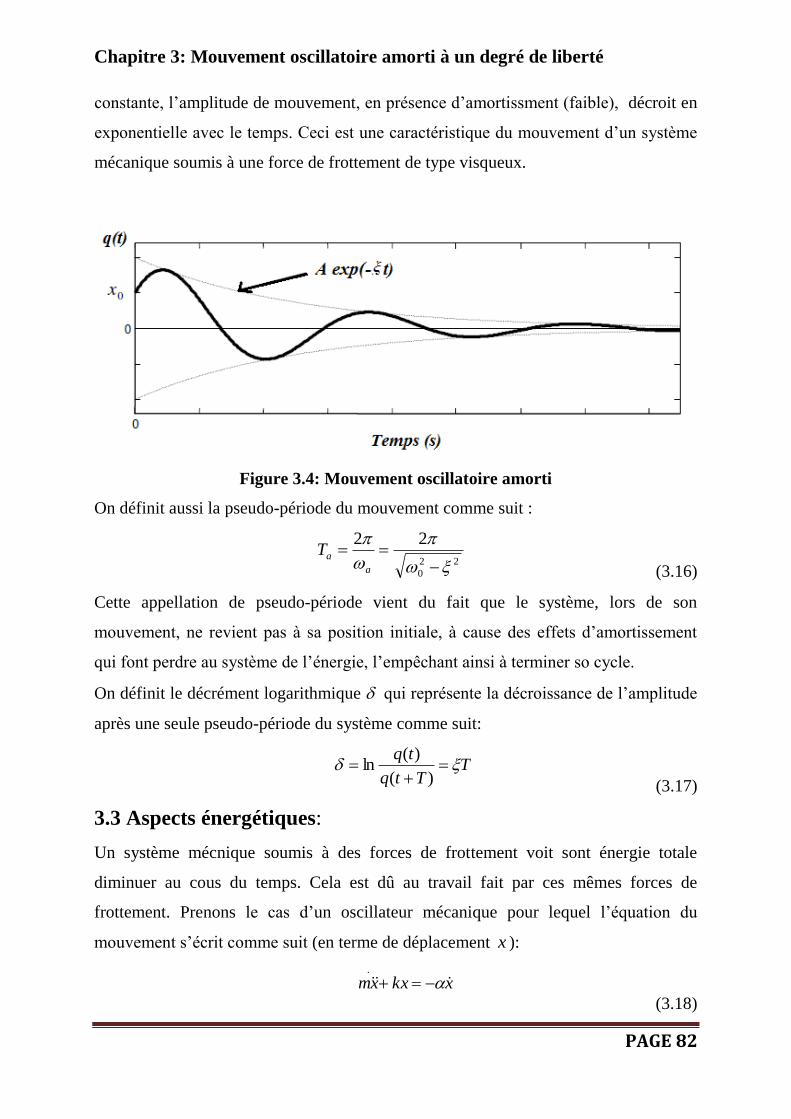
Chapitre 3: Mouvement oscillatoire amorti à un degré de liberté
PAGE 82
constante, l’amplitude de mouvement, en présence d’amortissment (faible), décroit en
exponentielle avec le temps. Ceci est une caractéristique du mouvement d’un système
mécanique soumis à une force de frottement de type visqueux.
Figure 3.4: Mouvement oscillatoire amorti
On définit aussi la pseudo-période du mouvement comme suit :
22
0
22
a
aT
(3.16)
Cette appellation de pseudo-période vient du fait que le système, lors de son
mouvement, ne revient pas à sa position initiale, à cause des effets d’amortissement
qui font perdre au système de l’énergie, l’empêchant ainsi à terminer so cycle.
On définit le décrément logarithmique qui représente la décroissance de l’amplitude
après une seule pseudo-période du système comme suit:
TTtq
tq
)(
)(ln
(3.17)
3.3 Aspects énergétiques:
Un système mécnique soumis à des forces de frottement voit sont énergie totale
diminuer au cous du temps. Cela est dû au travail fait par ces mêmes forces de
frottement. Prenons le cas d’un oscillateur mécanique pour lequel l’équation du
mouvement s’écrit comme suit (en terme de déplacement x ):
xkxxm .
(3.18)
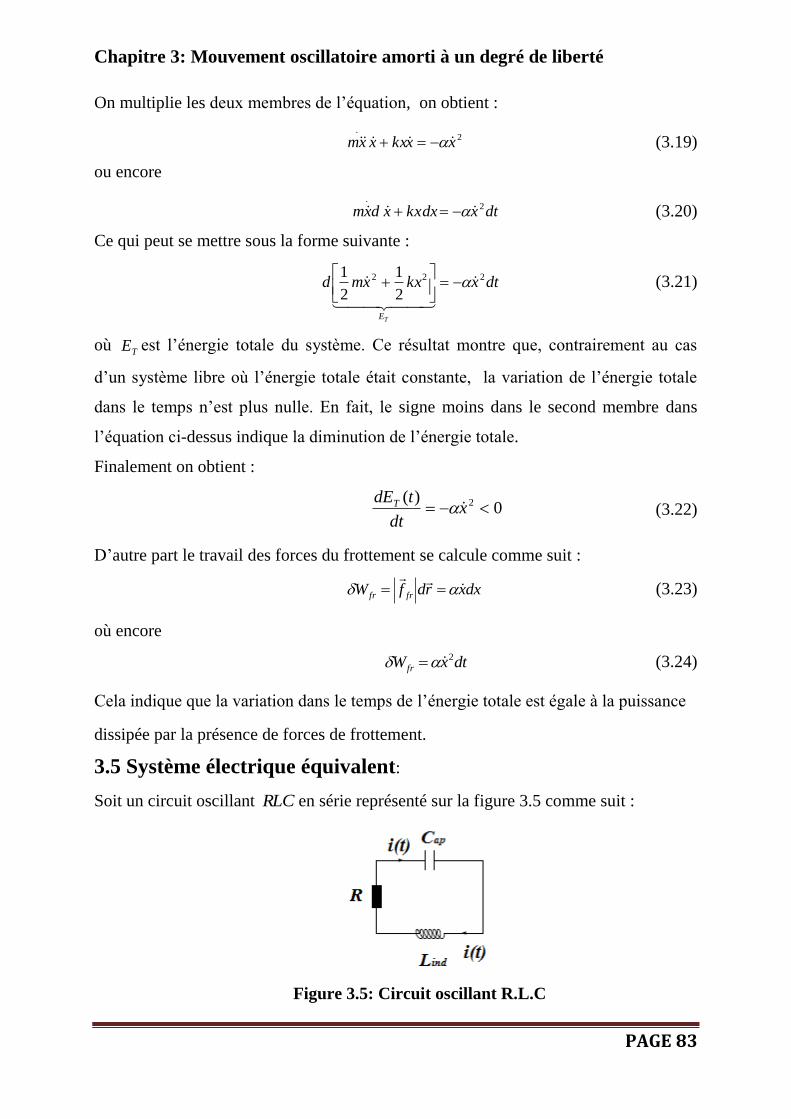
Chapitre 3: Mouvement oscillatoire amorti à un degré de liberté
PAGE 83
On multiplie les deux membres de l’équation, on obtient :
2.
xxkxxxm (3.19)
ou encore
dtxkxdxxdxm 2.
(3.20)
Ce qui peut se mettre sous la forme suivante :
dtxkxxmd
TE
222
2
1
2
1
(3.21)
où TE est l’énergie totale du système. Ce résultat montre que, contrairement au cas
d’un système libre où l’énergie totale était constante, la variation de l’énergie totale
dans le temps n’est plus nulle. En fait, le signe moins dans le second membre dans
l’équation ci-dessus indique la diminution de l’énergie totale.
Finalement on obtient :
0)( 2 x
dt
tdET
(3.22)
D’autre part le travail des forces du frottement se calcule comme suit :
dxxrdfW frfr
(3.23)
où encore
dtxW fr
2 (3.24)
Cela indique que la variation dans le temps de l’énergie totale est égale à la puissance
dissipée par la présence de forces de frottement.
3.5 Système électrique équivalent:
Soit un circuit oscillant RLC en série représenté sur la figure 3.5 comme suit :
Figure 3.5: Circuit oscillant R.L.C

Chapitre 3: Mouvement oscillatoire amorti à un degré de liberté
PAGE 84
L‘application des lois de Kirchhoff donne l’équation suivante:
0)()(1)(
tRidttiCdt
tdiL
ap
ind
(3.24)
Sachant que le courant i(t) pendant un temps dt apporte une charge telle que :
dt
tdqti
)()(
(3.25)
On obtient alors l’équation différentielle du mouvement comme suit :
0)(
)()( ap
indC
tqtqRtqL
(3.26)
On remarque que cette équation est équivalente à l’équation d’un mouvement
oscillatoire amorti représenté comme suit:
0)()()(0)(
)()( txm
ktx
mtx
CL
tqtq
L
Rtq
apindind
(3.27)
Pour des oscillations faibles, la solution générale de l’équation s’écrit alors:
)cos()( tAetq t
(3.28)
En constatant la similitude entre les équations différentielles gouvernant un système
mécanique d’une part et le système électrique d’autre part, on peut faire les analogies
électromécaniques suivantes:
Ret
kc
txtq
mL
ap
ind
1
)()( (3.29)
L’effet critique est caractérisé par :
ap
indcr
C
LR (3.30)

Chapitre 3: Mouvement oscillatoire amorti à un degré de liberté
PAGE 85
Il faut retenir que :
L’oscillation amortie est régie par
0)()(2)( 2
0 tqtqtq
Il existe 3 types de solutions :
Cas où le système est fortement amorti : 0
2
0
2
2,1
2121)(
r
eAeAtqtrtr
Cas où l’amortissement est critique : 0
rrr
eAtAtqtr
21
21 )()(
Cas où l’amortissement est faible : 0
22
0)cos()( avectAetq t
On définit le décrément logarithmique qui représente la décroissance
de l’amplitude à une seule période du système comme suit:
TTtq
tqLn
)(
)(
Il faut signaler que le système subit une perte d’énergie totale due au
travail des forces de frottements.
Chapitre 3: Mouvement oscillatoire amorti à un degré de liberté
PAGE 86
Applications
Problème 1:

Chapitre 3: Mouvement oscillatoire amorti à un degré de liberté
PAGE 87
On définit un oscillateur amorti régi par l’équation différentielle suivante :
0kxxxm.
Avec m est la masse du corps, k est le coefficient de rappel et x est le déplacement du
corps. On lance le système avec une vitesse initiale v0=25cm/s.
Donc on a : t=0, x=0 et 0vx
Calculer la période propre du système,
Sachant que : m=150g et k=3.8N/m.
Montrer que si α=0.6kg/s, le corps a un mouvement oscillatoire amorti.
Résoudre dans ce cas l’équation différentielle.
Calculer le pseudo-période du mouvement.
Calculer le temps mt au bout duquel la première amplitude mx est atteinte. En
déduire mx .
Calculer la vitesse d’une pseudo-période.
Solution:
L’équation du mouvement amorti est de forme :
20
20
..
m
ket
m2avec0xx2x0kxxxm
La période propre du système est T0:
s25.1
m
k
2T
s/rad5m
k
O
0
L’équation différentielle du mouvement se transforme en :
21
Avec
021'
0r2r
220
20
2'
20
2
Le corps m a un mouvement oscillatoire amorti.
La résolution de cette équation différentielle est de forme :

Chapitre 3: Mouvement oscillatoire amorti à un degré de liberté
PAGE 88
)tcos(Ae)t(x t
En appliquant les conditions initiales :
20cos0x,0t
2avec
vAvx,0t 0
0
La solution finale sera exprimée comme suit :
tsinev
)t(x)tcos(Ae)t(x t0t
La figure 6.3 représente le mouvement oscillatoire amorti.
Figure 3.6: Mouvement oscillatoire amorti
La pseudo-période se calcule comme suit :
s37.12
T
Le temps de la première amplitude mt
Il faut que :
Arctg
t0dt
)t(dx)tt(x mttm m
D’où :
4
Ts25.0tm
Problème 2 :

Chapitre 3: Mouvement oscillatoire amorti à un degré de liberté
PAGE 89
On donne l'équation du mouvement d'un système amorti (une masse m attachée
verticalement à un ressort de raideur k avec un coefficient d'amortissement de type
visqueux, ) sous la forme:
tjtjt aa eBeAetx
~~~
A~
et B~
étant deux constantes complexes, et a la nouvelle pulsation du système et
m2
.
1- Quelle est la nature du mouvement du système?
2- Écrire l'équation différentielle du mouvement du système.
3- En déduire l'expression de la pseudo-période d'oscillation du système.
4- Écrire A~
et B~
en fonction des conditions initiales (déplacement 00 xx et
vitesse 00 vv ).
5-En déduire la partie réelle de tx~ . Que représente-t-elle physiquement?
Solution :
1-Le mouvement est oscillatoire car la solution proposée contient un terme qui
représente une oscillation, à savoir tj ae et amorti car contenant le terme
te
2- L’équation différentielle du mouvement d'une masse attachée à un ressort en
présence de forces de frottement de type visqueux xF f est donnée par:
xkxxm .
En divisant les deux membres de l'équation par m, l'équation différentielle
devient:
022
0
.
xxx
avec
m
ket
m2 2
0
L'équation du mouvement du système en notation complexe s'écrit sous la
forme:
tjtjt aa eBeAetx
~~~
En remplaçant dans l'équation ci-dessus, on trouve

Chapitre 3: Mouvement oscillatoire amorti à un degré de liberté
PAGE 90
0~~
0~ BAx et 0
~~~~0~ vBAjBAx a
Après un calcul simple, on trouve :
aj
xvxA
22
~ 000 et
aj
xvxB
22
~ 000
et la solution générale s'écrit:
t
xvtxetx a
a
a
t
sin
~~cos~~ 00
0
Remarquons que toute quantité physique mesurable, par exemple un
déplacement ou une vitesse, est une quantité réelle; d'où l'équation du
mouvement du mobile est la partie réelle de tx~ :
t
xvtxetxtx a
a
a
t
sincos)(~Re 00
0
qui peut encore s'écrire comme:
tCetx a
t cos
avec
2
002
0
a
xvxC
et
ax
xvtg
0
00
C'est le mouvement périodique amorti avec une nouvelle pulsation a .
L'amortissement est assez faible pour que des oscillations autour de la position
d'équilibre aient lieu. Mais l'amplitude des oscillations diminue au cours du
temps pour tendre vers zéro quand t est grand. Le mobile finit toujours par
revenir à sa position d'équilibre.
Problème 3 :
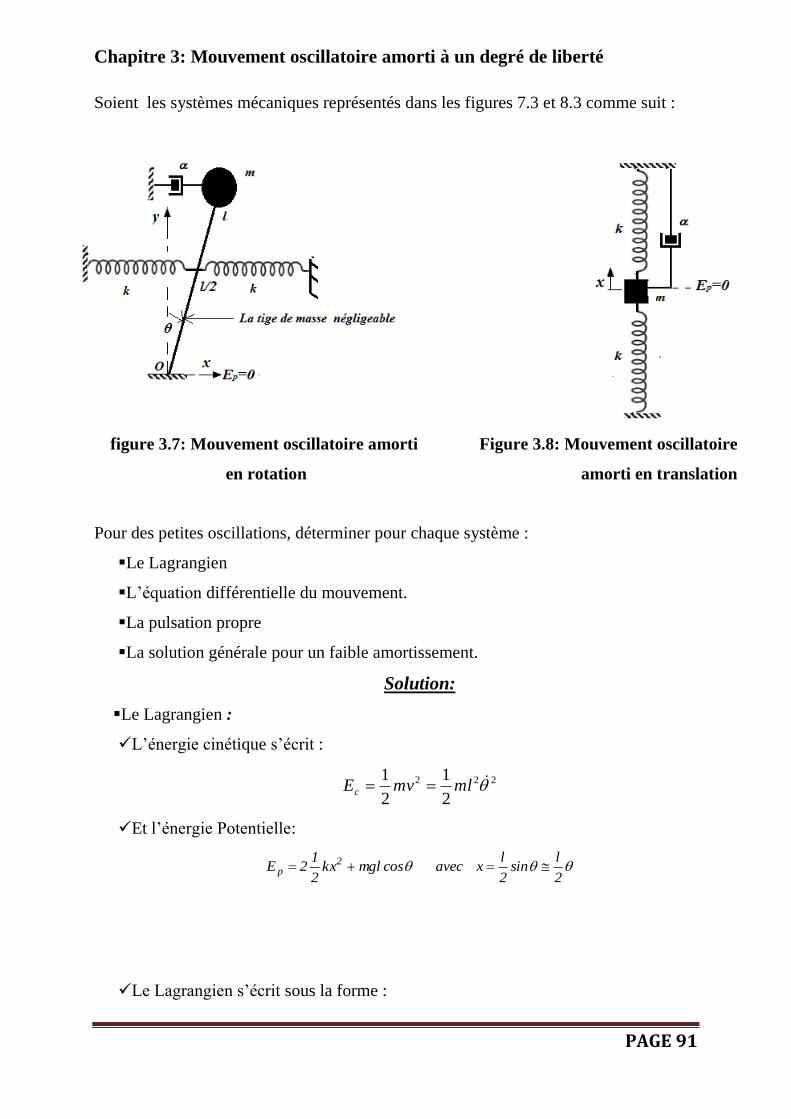
Chapitre 3: Mouvement oscillatoire amorti à un degré de liberté
PAGE 91
Soient les systèmes mécaniques représentés dans les figures 7.3 et 8.3 comme suit :
figure 3.7: Mouvement oscillatoire amorti
en rotation
Figure 3.8: Mouvement oscillatoire
amorti en translation
Pour des petites oscillations, déterminer pour chaque système :
Le Lagrangien
L’équation différentielle du mouvement.
La pulsation propre
La solution générale pour un faible amortissement.
Solution:
Le Lagrangien :
L’énergie cinétique s’écrit :
222
2
1
2
1mlmvEc
Et l’énergie Potentielle:
2
lsin
2
lxaveccosmglkx
2
12E 2
p
Le Lagrangien s’écrit sous la forme :

Chapitre 3: Mouvement oscillatoire amorti à un degré de liberté
PAGE 92
cos)2
(2
1),( 222 mgl
lkmlEEL pc
Après calcul, l’équation différentielle est donnée par:
0ml
mgl)2
l(k2
mM
L)
L(
dt
d2
2
ext
D’où :
2
2
2
0
2
0
)2
(2
,2
02
ml
mgll
k
m
Avec
La solution générale est dans le cas d’un faible amortissement de la forme:
)tcos(Ae)t( t
Le Lagrangien :
L’énergie cinétique on a:
22c xm
2
1mv
2
1E
L’énergie Potentielle s’écrit :
22p )x(k
2
1kx
2
1E
Le Lagrangien s’écrit alors :
22
2
1),( kxxmEExxL pc
Après calcul, on obtient l’équation différentielle du mouvement comme suit :
0xm
k2x
mxF
L)
L(
dt
dext
D’où
m
k2,
m2
0xx2x
Avec20
20
La solution générale pour un faible amortissement est de la forme :
)tcos(Ae)t(x t
Problème 4 :
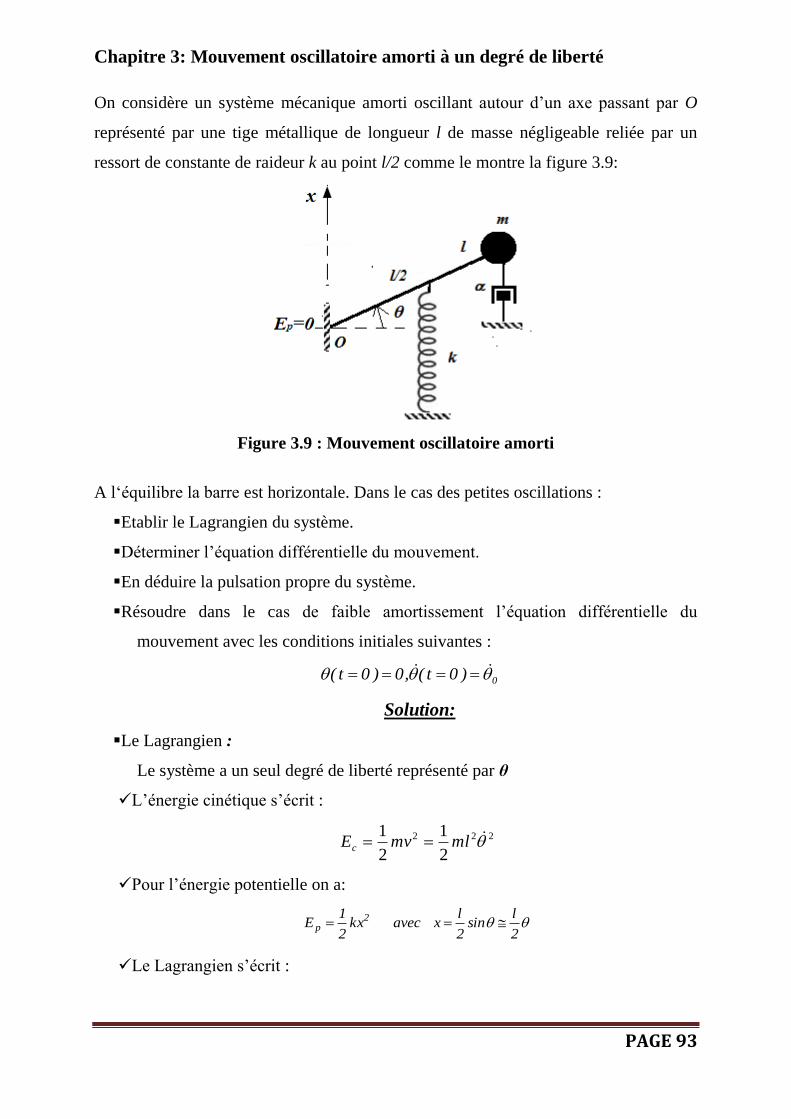
Chapitre 3: Mouvement oscillatoire amorti à un degré de liberté
PAGE 93
On considère un système mécanique amorti oscillant autour d’un axe passant par O
représenté par une tige métallique de longueur l de masse négligeable reliée par un
ressort de constante de raideur k au point l/2 comme le montre la figure 3.9:
Figure 3.9 : Mouvement oscillatoire amorti
A l‘équilibre la barre est horizontale. Dans le cas des petites oscillations :
Etablir le Lagrangien du système.
Déterminer l’équation différentielle du mouvement.
En déduire la pulsation propre du système.
Résoudre dans le cas de faible amortissement l’équation différentielle du
mouvement avec les conditions initiales suivantes :
0)0t(,0)0t(
Solution:
Le Lagrangien :
Le système a un seul degré de liberté représenté par θ
L’énergie cinétique s’écrit :
222
2
1
2
1mlmvEc
Pour l’énergie potentielle on a:
2
lsin
2
lxaveckx
2
1E 2
p
Le Lagrangien s’écrit :

Chapitre 3: Mouvement oscillatoire amorti à un degré de liberté
PAGE 94
222 )2
(2
1
2
1),(
lkmlEEL pc
L’équation différentielle est :
0ml
4
lk
mM
L)
L(
dt
d2
2
ext
D’où :
2
2
2
0
2
0
4,2
02
ml
lk
m
Pour un faible amortissement la solution s’écrit sous la forme :
)cos()( tAet t
Avec les conditions initiales, on a
0
0
A,2
,0,0t
avec
Alors, la solution générale s’écrit :
tet t
sin)( 0
Problème 5:
Soit une boule de masse m suspendue à une tige de longueur l, de masse négligeable et
plongée dans un liquide. Cette masse est soumise à une force de frottement visqueuse
dont le coefficient de frottement est , comme le montre la figure (3.10).
Etablir le Lagrangien du système.
Déterminer l’équation du mouvement.
Résoudre dans le cas de faible amortissement l’équation différentielle.
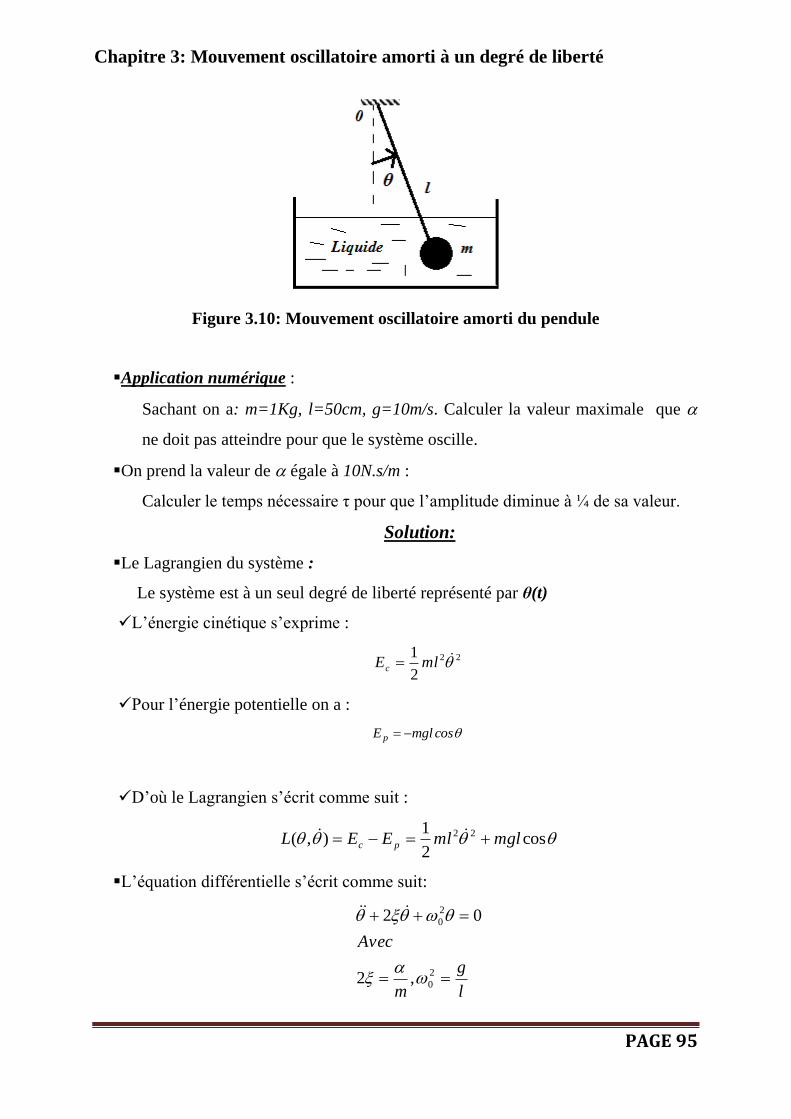
Chapitre 3: Mouvement oscillatoire amorti à un degré de liberté
PAGE 95
Figure 3.10: Mouvement oscillatoire amorti du pendule
Application numérique :
Sachant on a: m=1Kg, l=50cm, g=10m/s. Calculer la valeur maximale que
ne doit pas atteindre pour que le système oscille.
On prend la valeur de égale à 10N.s/m :
Calculer le temps nécessaire τ pour que l’amplitude diminue à ¼ de sa valeur.
Solution:
Le Lagrangien du système :
Le système est à un seul degré de liberté représenté par θ(t)
L’énergie cinétique s’exprime :
22
2
1mlEc
Pour l’énergie potentielle on a :
cosmglE p
D’où le Lagrangien s’écrit comme suit :
cos2
1),( 22 mglmlEEL pc
L’équation différentielle s’écrit comme suit:
l
g
m
Avec
2
0
2
0
,2
02

Chapitre 3: Mouvement oscillatoire amorti à un degré de liberté
PAGE 96
La solution générale est de la forme :
)cos()( tAet t
La valeur maximale de max :
m/s.N94.8l
gm20 max
2
0
2
Le temps τ :
s28.04ln
e4
1Ae t)t(
Problème 6:
L'oscillateur, représenté sur la figure (3.11), est constitué d'une masse m attachée à
deux ressorts de constante de raideur 2
k. La masse se déplace sur un plan horizontal
sur lequel la force de frottement fR n'est pas négligeable.
A l'instant st 0 la masse est déplacée d'une distance 0X puis abandonnée sans
vitesse initiale.
1- Écrire l'équation différentielle du mouvement du système.
2- En déduire la solution générale du mouvement.
3- Tracer la courbe représentant la distance parcourue par la masse en fonction du
temps.
4- Que peut-on conclure?
Figure 3.11: Mouvement oscillatoire amorti du pendule

Chapitre 3: Mouvement oscillatoire amorti à un degré de liberté
PAGE 97
Solution:
1- L'équation du mouvement du système s'écrit:
fRkxxm
avec 1 si la masse se déplace dans le sens positif des x, et 1 dans le
cas contraire.
En introduisant m
k2
0 , on aura:
m
Rxx
f 2
0
2- La solution générale s'obtient en ajoutant à la solution de l'équation sans
second membre (solution homogène):
tAtxh 0cos
la solution particulière Cx p (car le second membre est constant). En
remplaçant dans l'équation générale on trouve:
k
Rx
f
p
La solution générale s'écrit donc:
tAtx 0cos
A et seront définies par les conditions initiales.
3- A l'instant 0t la masse est déplacée d'une longueur 0X puis abandonnée
sans vitesse initiale.
1ère partie du mouvement : 2
0T
t
La masse m se déplace dans le sens négatif des x: 1 , et l'équation du
mouvement s'écrit:
tAtx 0cos
Avec les conditions initiales 000 XAx et 00 x on a:
tXtx 00 cos
et
tXtx 000 sin

Chapitre 3: Mouvement oscillatoire amorti à un degré de liberté
PAGE 98
qui s'annule à 2
Tt , où
0
2
T .
A l'instant 4
Tt l'élongation tx est égale à , alors que dans le cas de
l'oscillateur non amorti on avait mx 0 .
A la fin de cette première partie 2
Tt : 201 XXtx . L'amplitude a
diminué de 2 .
2ème partie du mouvement : TtT
2
La masse se déplace à présent dans le sens positif, donc 1 , et l'équation du
mouvement s'écrit:
tAtx 0cos
Avec les conditions initiales 22
0
X
Tx et 0
2
Tx on a:
tXtx 00 cos3
Et
tXtx 000 sin3
qui s'annule à Tt .
A l'instant Tt l'élongation 401 XATx .
Au bout d'une pseudo-période, l'amplitude a donc diminué de 4 , et ça sera le
cas pour chaque pseudo-période.
La courbe qui représente le mouvement est formé d'arcs de sinusoïdales dont les
sommets 0A , 1A , 2A ,... se placent respectivement sur une droite.
Le système s'arrête lorsque la force de rappel devient plus faible que la force de
frottement, c’est à dire: fp RkX .
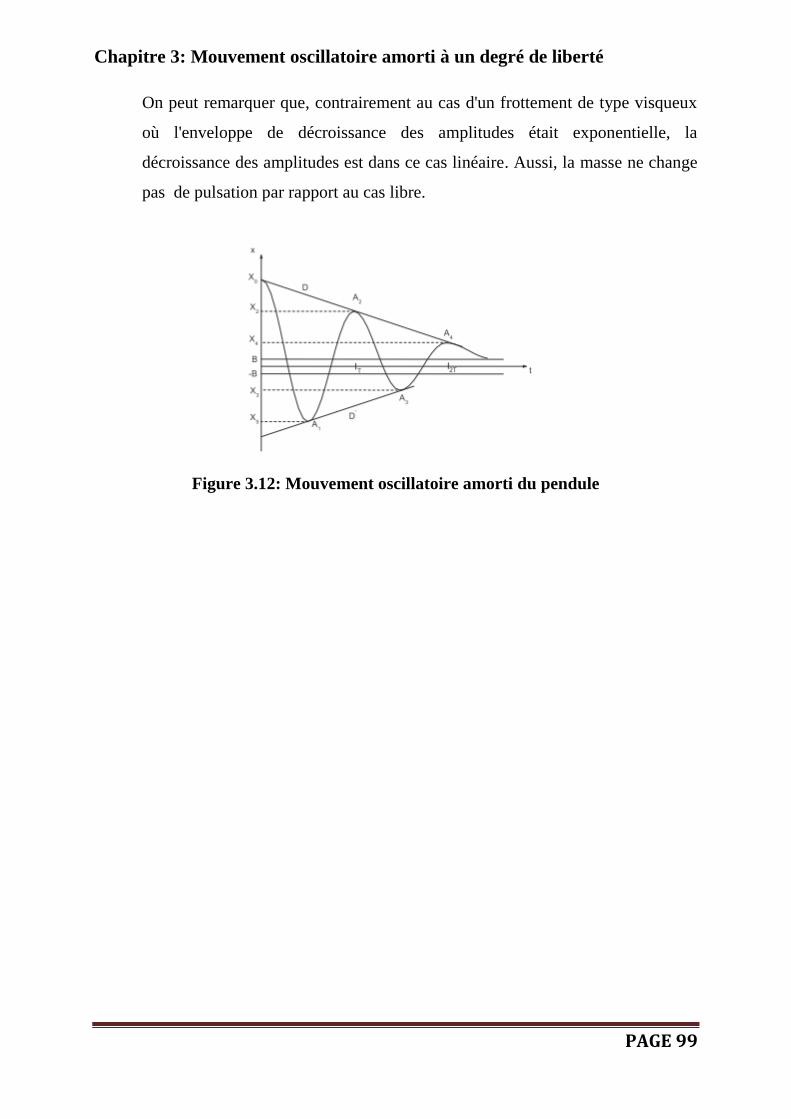
Chapitre 3: Mouvement oscillatoire amorti à un degré de liberté
PAGE 99
On peut remarquer que, contrairement au cas d'un frottement de type visqueux
où l'enveloppe de décroissance des amplitudes était exponentielle, la
décroissance des amplitudes est dans ce cas linéaire. Aussi, la masse ne change
pas de pulsation par rapport au cas libre.
Figure 3.12: Mouvement oscillatoire amorti du pendule
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 100
Chapitre 4 :
Mouvement Oscillatoire forcé
d’un système mécanique à un degré de
liberté

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 101
4.1 Définitions:
Les vibrations mécaniques sont à l’origine d’une grande partie des problèmes
industriels. Ces vibrations sont symbolisées par un ensemble d’oscillateurs constitués
de masse, de ressorts et d’amortisseurs. Une oscillation forcée concerne tout système
en mouvement sous l’action d’une force extérieure. Pour un système mécanique le
modèle physique est représenté sur la figure (4.1).
Figure 4.1: Schéma d’un mouvement forcé
L’équation de mouvement du système ci-dessus est donnée par :
)()()()( tFtxtkxtxm (4.1)
où )(tkxFr est la force de rappel du ressort, )(txF fr la force de frottement et
tF
force extérieure appliquée au système, respectivement. L’équation différentielle
ci-dessus devient :
m
tFtxtxtx
)()()(2)( 2
0
(4.2)
Avec
m
ket
m 2
02
Ceci est une équation différentielle linéaire du second ordre non homogène à équation
à coefficients constants
.
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 102
4.2 Cas d’une force extérieure constante :
A l'instant 0t l'oscillateur mécanique est soumis à une force constante F constante.
La masse initialement au repos en 0x et sans vitesse initiale se déplace sous l'action
de la force F . L'équation différentielle du mouvement du système s'écrit donc:
m
Ftxtxtx )()(2)( 2
0 (4.3)
La solution de cette équation est composée de deux termes: une solution sans second
membre (homogène) )(txh que nous avons déjà obtenue, et une solution particulière
)(tx p
qui a la même forme que le second membre de l'équation différentielle, c'est à
dire une constante :
)()()( txtxtx pg (4.4)
La solution particulière s'obtient en remplaçant une constante )(tx p $x_p$ dans
l'équation différentielle ci-dessus, ce qui donne:
k
Fx
m
Fx pp 2
0
La solution générale s'écrit donc:
k
Ftxtx g )()( (4.5)
La solution sans second membre prend trois formes selon le degré d’amortissement
appliqué sur le système :
4.2.1Cas d’un amortissment faible ( 0 )
La solution de l’équation du mouvement s’écrit sous la forme :
k
FtCetx a
t )cos()( (4.6)
En utilisant les conditions initiales suivantes :
0)0( x
et
0)0( x
On obtient
)cos(11)(
2
2
textx a
t
a
p (4.7)

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 103
avec
a
tg
(4.8)
Le premier terme de la solution tend vers zéro et peut être considéré comme nul après
un temps donné, et donc la solution générale elle-même tend vers k
F.
4.2.2 Cas d’un amortissment critique ( 0 ) :
L'équation de mouvement s'écrit
k
FeBtAtx t )()(
(4.9)
En appliquant les conditions initiales 0)0( x
et
0)0( x , on trouve:
t
p etxtx )1(1)(
(4.10)
où la masse, sans oscillation et après un temps donné, s’immobilise à la position px .
4.2.3 Cas d’un amortissment fort ( 0 ) :
La solution de l’équation du mouvement s’écrit sous la forme :
k
FBeAeetx ttt )( (4.11)
avec 2
0
2
En utilisant les conditions initiales suivantes : 0)0( x
et
0)0( x
, on obtient
)cos(11)(
2
2
textx a
t
a
p (4.12)
avec
a
tg
(4.13)
Le premier terme de la solution tend vers zéro et peut être considéré comme nul après
un temps donné, et donc la solution générale elle-même tend vers k
F.
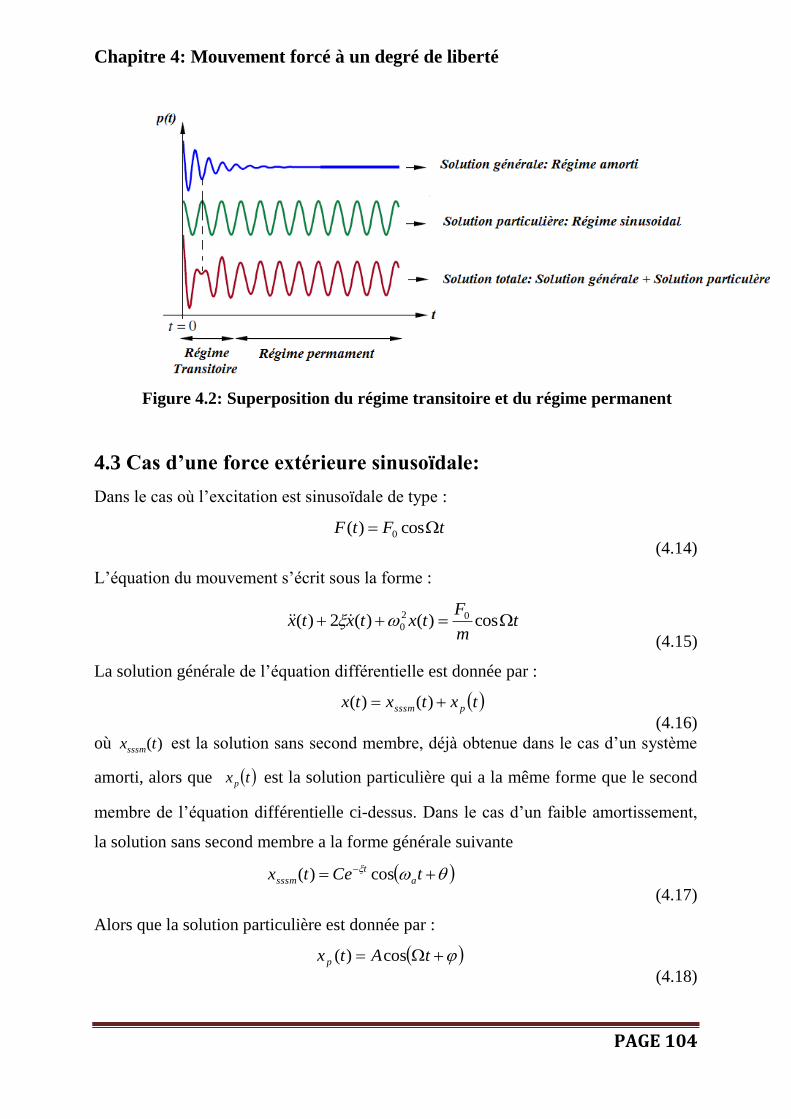
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 104
Figure 4.2: Superposition du régime transitoire et du régime permanent
4.3 Cas d’une force extérieure sinusoïdale:
Dans le cas où l’excitation est sinusoïdale de type :
tFtF cos)( 0
(4.14)
L’équation du mouvement s’écrit sous la forme :
tm
Ftxtxtx cos)()(2)( 02
0 (4.15)
La solution générale de l’équation différentielle est donnée par :
txtxtx psssm )()(
(4.16)
où )(txsssm est la solution sans second membre, déjà obtenue dans le cas d’un système
amorti, alors que txp est la solution particulière qui a la même forme que le second
membre de l’équation différentielle ci-dessus. Dans le cas d’un faible amortissement,
la solution sans second membre a la forme générale suivante
tCetx a
t
sssm cos)(
(4.17)
Alors que la solution particulière est donnée par :
tAtx p cos)(
(4.18)

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 105
où A est l’amplitude du mouvement de la masse en réponse à la force extérieure et
le déphasage de la masse par rapport à la force extérieure.
Ces deux constantes ne peuvent être simplement obtenues par les conditions initiales.
représente l’amplitude de la solution totale et le déphasage. Finalement la solution
générale se met sous la forme :
tAtCetx a
t coscos)(
(4.19)
Selon cette expression, la masse exécute un mouvement complexe (qui n’est pas
harmonique simple) avec deux pulsations : a et . Remarquons aussi que la solution
sans second membre s’annule au bout d’un certain temps à cause de la présence du
terme exponentiel. Avant que cela se passe, le système est dit dans le régime
transitoire. Une fois cette solution s’annule, le mouvement de la masse devient
sinusoïdal simple avec une amplitude constante A , avec la même pulsation sque la
force extérieure mais avec un déphasage . Le système est donc dans le régime
permanent. Cette situation est indiquée sur la figure 5.2.
Pour obtenir les expressions de A et il serait utile de passer à la notation complexe
de la solution proposée pour le régime permanent, à savoir :
tj
p eAtx ~
)(~
(4.20)
oùAeA
~, en supposant que le système est soumis à une force extérieure a la forme
complexe suivante
tjeFtF 0 (4.21)
En remplaçant cette solution dans l’équation différentielle suivante :
tjem
Ftxtxtx 02
0 )(~)(~
2)(~
(4.22)
on obtient
m
FAj 02
0
2 ~2
(4.23)
L’amplitude s’écrit donc sous la forme :
jm
FeAA j
2
1~2
0
2
0
(4.24)
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 106
dont le module a l’expression:
2222
0
2
0
4)(
1
m
FA
(4.25)
avec
2
0
2
2
arctg (4.26)
La solution en régime permanent s’écrit donc comme suit : tjAetx )(~
(4.27)
Mais la solution réelle qui correspond à un système mécanique soumis à une force
réelle est donnée par
tAtxtx cos)(~Re
(4.28)
4.3.1 Etude de l’amplitude en fonction de
:
L’amplitude
A
est maximale quand son dénominateur, ou plus encore son carré est
minimum.
Étudions donc la fonction
2222
0
2 4)( h (4.29)
La variation de la fonction ci-dessus:
08)(4)( 22
0
2
d
dh (4.30)
On obtient ainsi deux solutions:
22
002
01
2
0
r (4.31)
Ce sont là les extremums de la fonction h(Ω). Le signe de la deuxième dérivée
détermine le maximum et le minimum de cette même fonction, en l’occurence:
)2(41288)(4)( 22
0
2222
0
22
d
hd
Pour la première pulsation 01
on a :
0
01
2
2
d
hd (4.32)
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 107
La pulsation 01
présente donc un minimum pour l’amplitude
A
Pour la deuxième pulsation 02
on a :
0
02
2
2
d
hd (4.33)
La pulsation 02
présente donc un maximum pour l’amplitude
A
Donc pour la pulsation r 02
, la réponse du système est maximale. Ce
phénomène est appelé la résonnance. Il est utile de noter qu’au voisinage de r
on
peut avoir de très grandes oscillations qui peuvent détériorer le système.
A la fréquence de résonnance l’amplitude est donnée par:
22
0
0
2222
0
2
0max
4)(
1)(
F
m
FAA
rr
r
(4.34)
Pour de très faibles amortissements (0
), l’amplitude maximale est égale à :
0
0max
FA (4.35)
La figure 4.3 illustre la variation du rapport de l’amplitude en fonction du rapport de la
fréquence pour différentes valeurs de ξ.
On définit le déplacement efficace comme suit:
2)(
1 max
0
2 Axdttx
Tx
eff
T
eff
(4.36)
Lorsque la fréquence des oscillations amorties est égale à la fréquence des oscillations
forcées on assiste à des phénomènes de résonance.
La figure (4.4) représente la variation la phase en fonction du rapport de la fréquence
pour différents valeurs de ξ .
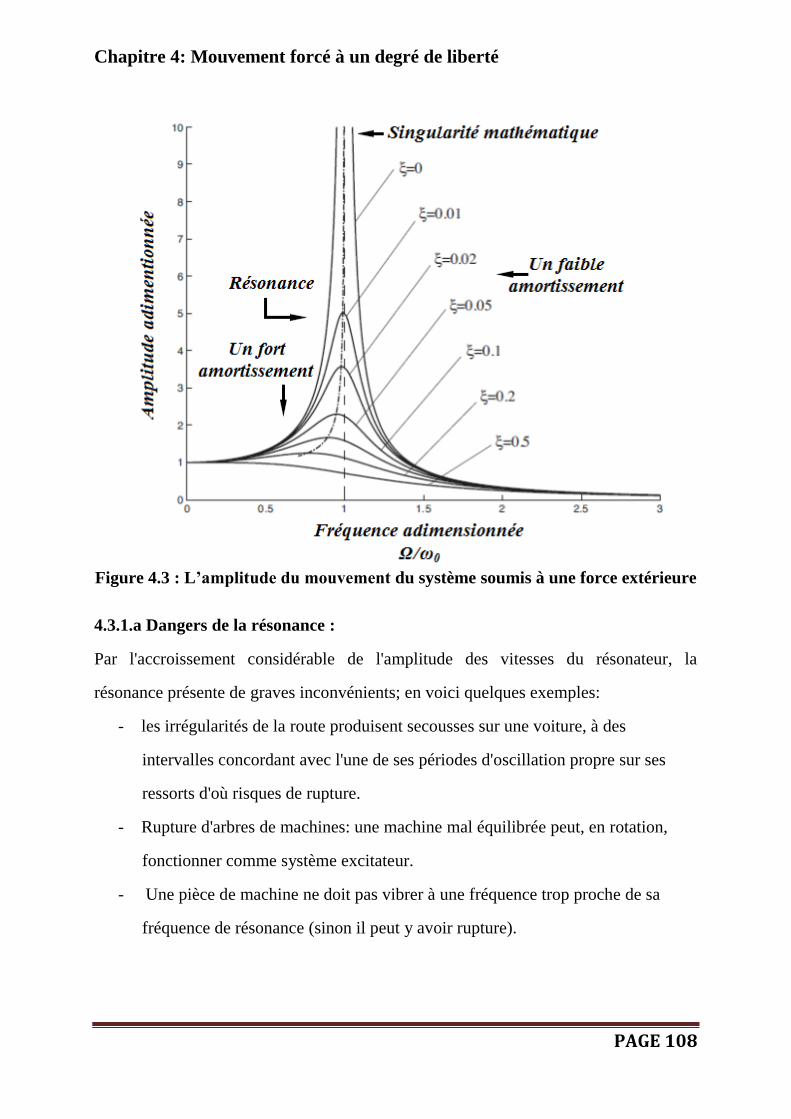
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 108
Figure 4.3 : L’amplitude du mouvement du système soumis à une force extérieure
4.3.1.a Dangers de la résonance :
Par l'accroissement considérable de l'amplitude des vitesses du résonateur, la
résonance présente de graves inconvénients; en voici quelques exemples:
- les irrégularités de la route produisent secousses sur une voiture, à des
intervalles concordant avec l'une de ses périodes d'oscillation propre sur ses
ressorts d'où risques de rupture.
- Rupture d'arbres de machines: une machine mal équilibrée peut, en rotation,
fonctionner comme système excitateur.
- Une pièce de machine ne doit pas vibrer à une fréquence trop proche de sa
fréquence de résonance (sinon il peut y avoir rupture).

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 109
- L'effondrement du pont suspendu Tacome: un vent violent crée un ensemble
complexe de forces qui engendrent des oscillations de torsion de fréquence
correspondant à la fréquence de résonance du pont.
- Rupture du pont d'Angers en 1852 sous l'action d'une troupe au pas cadencé.
4.3.2 Étude de la phase en fonction de
:
En régime permanent l'oscillation présente une différence de phase
par rapport à
la force excitatrice
tF .En effet ,
2
0
2
2
tg (4.37)
En dérivant l’équation ci-dessus, on obtient
22
0
2
2
0
2
22
0
2
2
0
2 2222
d
dtg (4.38)
Mais on a aussi
d
d
d
dtg
d
dtg
(4.39)
ou encore
22
0
2
2222
0
2
2
0
2
222
0
2
2
0
2
41
12
1
12
tg
d
dtgd
dtg
d
d (4.40)
Sur la figure (4.4), on trace la variation de la phase
opour différentes valeurs
d’amortissement. On doit noter qu’à faibles pulsations extérieures la réponse est
presque en phase avec la force extérieure, alors qu’elle augmente lorsque la pulsation
augmente jusqu’à atteindre sa valeur maximale
.
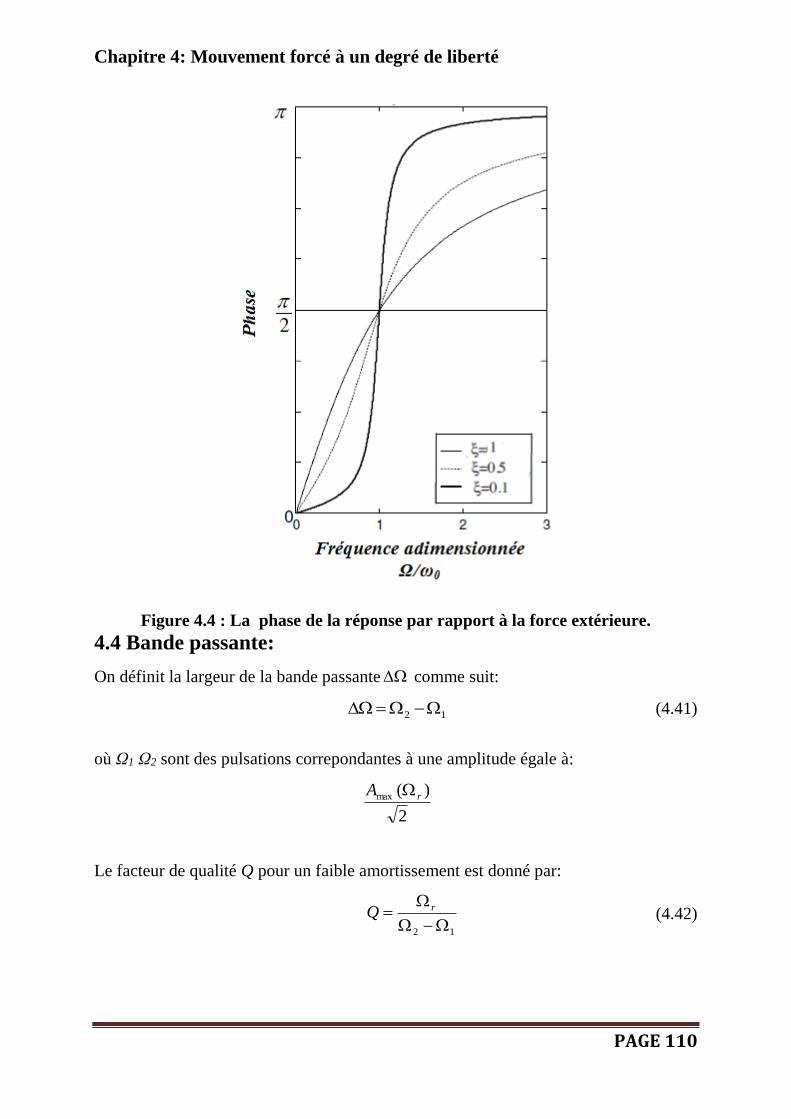
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 110
Figure 4.4 : La phase de la réponse par rapport à la force extérieure.
4.4 Bande passante:
On définit la largeur de la bande passante comme suit:
12
(4.41)
où Ω1 Ω2 sont des pulsations correpondantes à une amplitude égale à:
2
)(max rA
Le facteur de qualité Q pour un faible amortissement est donné par:
12
rQ
(4.42)
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 111
4.5 Cas d’une force extérieure périodique non-sinusoidale:
Dans le cas d’une excitation F(t) quelconque mais périodique de période T, il est très
utile d’utiliser le théorème de Fourier qui permet d’écrire toute fonction périodique
satisfaisant à certaine conditions analytiques (pratiquement toujours réalisées en
physique) sous la forme d’une série trigonométrique (ou série de Fourier) dont les
termes ont des fréquences multiples de la fréquence de la fonction donnée, à savoir :
1
0 sincos2
)(n
nn tnbtnaa
tF (4.43)
où T
2
et les coefficients a0, an et bn sont déterminés comme suit :
T
T
n
T
n
T
tdttFT
b
et
tdtntFT
a
dttFT
a
sin)(2
cos)(2
)(1
0
,
0
0,
(4.44)
Si la fonction étudiée
)(tF
n'est pas périodique, car, par exemple, définie juste sur un
intervalle, on peut construire une fonction périodique
)(tf
(faire un prolongement)
définie dans l'intervalle
,
, et qui contient la partie repésentant
)(tF
.
La deuxième étape dans notre étude de la réponse d’un système mécanique (électrique)
linéaire à une excitation non sinusoidale mais périodique est de faire recours au
principe de supersposition qui consiste à faire en sorte que la réponse d’un système
linéaire à une somme d’excitations extérieures soit la somme des réponses du même
système à chacune des excitations décomposant la force extérieure.

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 112
4.6 Énergies mises en jeu :
L'excitateur lors d'un déplacement
dx
fournit au système (masse+ressort) l'énergie:
dtdt
dxtFdxtFdW )().(
(4.45)
où
)().()( txtFtP
est la puissance instantanée en régime permanent qui s'écrit :
)sin()cos()( 0 tAtFtP (4.46)
On calcule la moyenne temporelle de la puissance de la manière suivante :
sin2
)sin()cos()(1
)( 0
0
0
0
AFdttt
T
AFdttP
TtP
TT
(4.47)
avec
2T
D’autre part, on sait que
21sin
tg
tg
et
2
0
2
2
tg
Ce qui nous amène à écrire
2222
0
2
22
00
4sin
2)(
m
FAFtP
(4.48)
On peut montrer que la puissance moyenne fournie par l'excitateur (ou puissance à
l'entrée) est égale à la puissance perdue par frottement moyenne dans le temps. Pour
cela on utilise à l'équation différentielle du système amorti forcé:
)cos()()()( 0 tFtkxtxtxm (4.49)

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 113
multiplions les deux membres de l'équation par
)(tx :
)()cos()()()()()()( 0 txtFtxtxktxtxtxtxm (4.50)
qui peut être écrite sous la forme:
)()()cos()(2
1)(
2
1 2
0
22 txtxtFtkxtxmdt
d
(4.51)
où
)(2
1)(
2
1 22 tkxtxmET
est l'énergie totale du système (l'énergie emmagasinée dans le système), pouvant
s’écrire sous une forme plus explicite :
)(cos2
1)(sin
2
1 22222 tkAtAmET
(4.52)
L’énergie totale n’est pas instantanément conservée.
Prenons la moyenne sur une période T de l'équation ci-dessus :
dttxtxtFT
dtdt
dE
T
TT
T
0
2
0
0
)()()cos(11
(4.53)
Le premier membre de l’équation ci-dessus s’écrit
0)0()(1
0
TT
T
T ETEdtdt
dE
T (4.54)
D’autre par
dttAttAFT
dttxtxtFT
TT
0
222
0
0
2
0 )(sin)sin()cos(1
)()()cos(1
Le premier terme du second membre de l'équation ci-dessus représente la puissance
moyenne fournie par l'excitateur, déjà calculée. Le second terme représente la
puissance moyenne dissipée par le frottement. Le calcul mathématique nous permet de
de vérifier que le second memebre est nul.
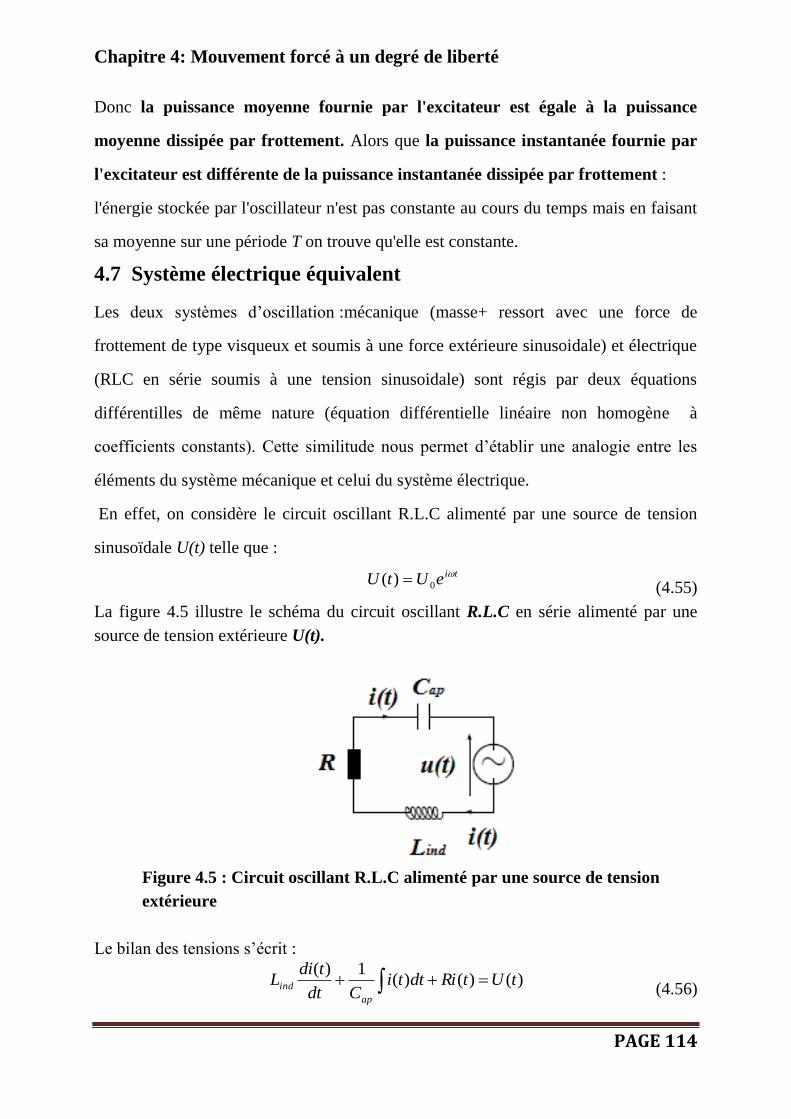
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 114
Donc la puissance moyenne fournie par l'excitateur est égale à la puissance
moyenne dissipée par frottement. Alors que la puissance instantanée fournie par
l'excitateur est différente de la puissance instantanée dissipée par frottement :
l'énergie stockée par l'oscillateur n'est pas constante au cours du temps mais en faisant
sa moyenne sur une période T on trouve qu'elle est constante.
4.7 Système électrique équivalent
Les deux systèmes d’oscillation :mécanique (masse+ ressort avec une force de
frottement de type visqueux et soumis à une force extérieure sinusoidale) et électrique
(RLC en série soumis à une tension sinusoidale) sont régis par deux équations
différentilles de même nature (équation différentielle linéaire non homogène à
coefficients constants). Cette similitude nous permet d’établir une analogie entre les
éléments du système mécanique et celui du système électrique.
En effet, on considère le circuit oscillant R.L.C alimenté par une source de tension
sinusoïdale U(t) telle que :
tieUtU 0)(
(4.55)
La figure 4.5 illustre le schéma du circuit oscillant R.L.C en série alimenté par une
source de tension extérieure U(t).
Figure 4.5 : Circuit oscillant R.L.C alimenté par une source de tension
extérieure
Le bilan des tensions s’écrit :
)()()(1)(
tUtRidttiCdt
tdiL
ap
ind
(4.56)

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 115
Sachant que le courant i(t) pendant un temps dt apporte une charge telle que :
dt
tdqti
)()(
On obtient alors l’équation différentielle du mouvement comme suit :
)()(
)()( tUC
tqtqRtqL
(4.57)
On remarque que cette équation est équivalente à l’équation d’un mouvement
oscillatoire forcé, à savoir:
m
tFtx
m
ktx
mtx
L
tU
LC
tqtq
L
Rtq
)()()()(
)()()()(
On peut conclure que l’analogie entre le système mécanique et le système électrique
est de la forme suivante:
)()(1
)()(tFtU
Ret
kc
txtq
mL
ap
ind
4.8 Effet POGO
L'effet POGO est, en mécanique des structures, un phénomène oscillatoire
longitudinal instable qui peut se produire dans les étages à ergols liquides d'un lanceur
générant des chocs pouvant détruire le lanceur ou sa charge. Cet effet est provoqué par
des fluctuations de poussée du moteur qui engendrent des vibrations de structure et des
colonnes du carburant liquide qui, à leur tour, se répercutent sur l'alimentation du
moteur. Lorsque ce cycle de perturbations entre en résonance, les oscillations
augmentent et peuvent détruire les structures. Le nom provient du jeu appelé Pogo
stick. Cet effet a été à l’origine de la destruction de plusieurs fusées et satellites,

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 116
Figure 6.4 : Le jouet POGO-Stick
Figure 7.4 : Mécanisme rencontré dans un réservoir de liquide
Soumis à des vibrations
Considérons le système mécanique suivant :
00 )0()0(
)()()(
vxetxx
tFtkxtxm
Sachant que F(t) représente l’excitation permanente et (x0 ; v0) représentent les
conditions initiales en position et en vitesse.
Pour une excitation permanente de forme sinusoïdale, on a :
tFtF sin)( 0
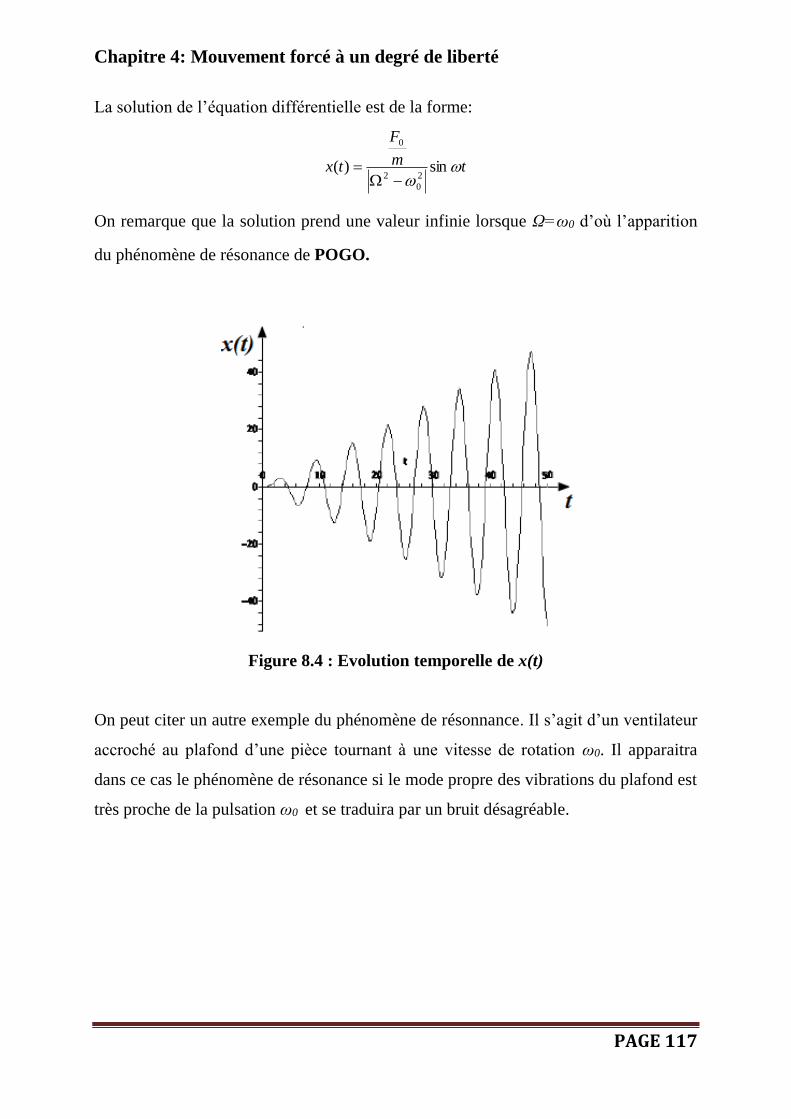
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 117
La solution de l’équation différentielle est de la forme:
tm
F
tx
sin)(2
0
2
0
On remarque que la solution prend une valeur infinie lorsque Ω=ω0 d’où l’apparition
du phénomène de résonance de POGO.
Figure 8.4 : Evolution temporelle de x(t)
On peut citer un autre exemple du phénomène de résonnance. Il s’agit d’un ventilateur
accroché au plafond d’une pièce tournant à une vitesse de rotation ω0. Il apparaitra
dans ce cas le phénomène de résonance si le mode propre des vibrations du plafond est
très proche de la pulsation ω0 et se traduira par un bruit désagréable.
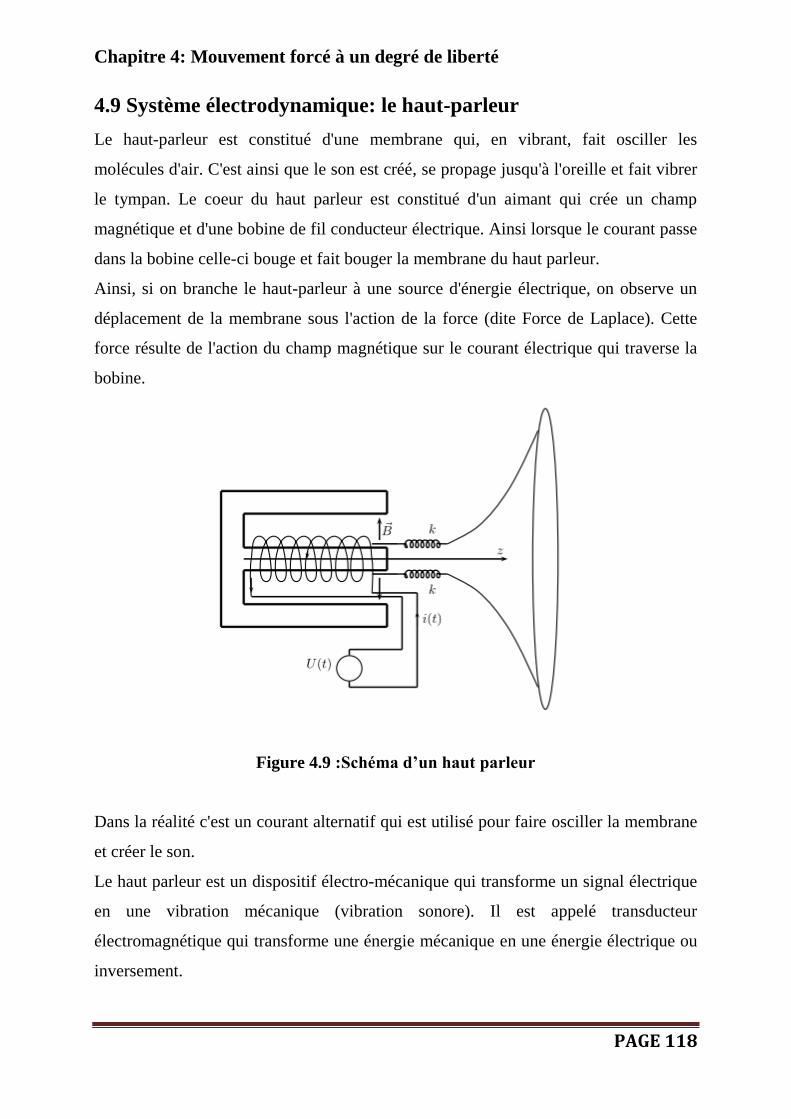
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 118
4.9 Système électrodynamique: le haut-parleur
Le haut-parleur est constitué d'une membrane qui, en vibrant, fait osciller les
molécules d'air. C'est ainsi que le son est créé, se propage jusqu'à l'oreille et fait vibrer
le tympan. Le coeur du haut parleur est constitué d'un aimant qui crée un champ
magnétique et d'une bobine de fil conducteur électrique. Ainsi lorsque le courant passe
dans la bobine celle-ci bouge et fait bouger la membrane du haut parleur.
Ainsi, si on branche le haut-parleur à une source d'énergie électrique, on observe un
déplacement de la membrane sous l'action de la force (dite Force de Laplace). Cette
force résulte de l'action du champ magnétique sur le courant électrique qui traverse la
bobine.
Figure 4.9 :Schéma d’un haut parleur
Dans la réalité c'est un courant alternatif qui est utilisé pour faire osciller la membrane
et créer le son.
Le haut parleur est un dispositif électro-mécanique qui transforme un signal électrique
en une vibration mécanique (vibration sonore). Il est appelé transducteur
électromagnétique qui transforme une énergie mécanique en une énergie électrique ou
inversement.
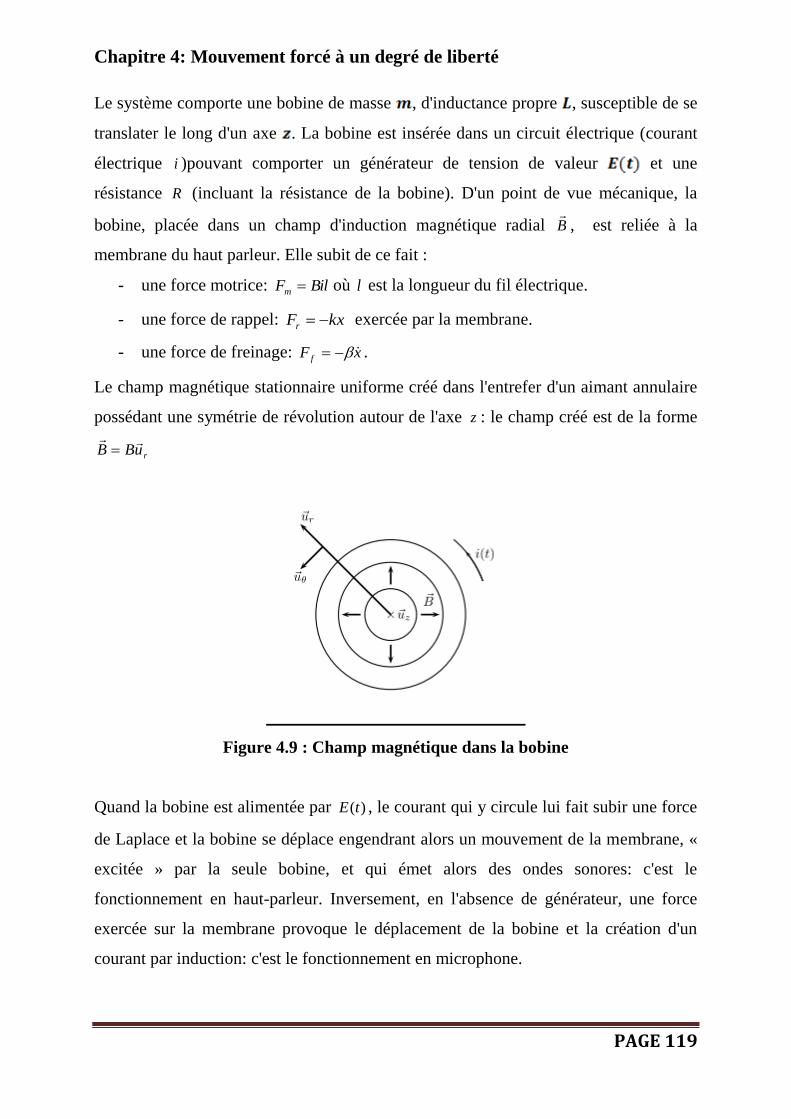
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 119
Le système comporte une bobine de masse , d'inductance propre , susceptible de se
translater le long d'un axe . La bobine est insérée dans un circuit électrique (courant
électrique i )pouvant comporter un générateur de tension de valeur et une
résistance R (incluant la résistance de la bobine). D'un point de vue mécanique, la
bobine, placée dans un champ d'induction magnétique radial B
, est reliée à la
membrane du haut parleur. Elle subit de ce fait :
- une force motrice: BilFm où l est la longueur du fil électrique.
- une force de rappel: kxFr exercée par la membrane.
- une force de freinage: xF f .
Le champ magnétique stationnaire uniforme créé dans l'entrefer d'un aimant annulaire
possédant une symétrie de révolution autour de l'axe z : le champ créé est de la forme
ruBB
Figure 4.9 : Champ magnétique dans la bobine
Quand la bobine est alimentée par )(tE , le courant qui y circule lui fait subir une force
de Laplace et la bobine se déplace engendrant alors un mouvement de la membrane, «
excitée » par la seule bobine, et qui émet alors des ondes sonores: c'est le
fonctionnement en haut-parleur. Inversement, en l'absence de générateur, une force
exercée sur la membrane provoque le déplacement de la bobine et la création d'un
courant par induction: c'est le fonctionnement en microphone.

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 120
La bobine subit une force de Laplace donnée par:
zrL uilBuuidlBBldiF
(4.58)
La longueur l représente la longueur totale du fil bobiné, soit aNl 2 , si la bobine
comporte N spires de rayon a .
L'équation du mouvement de la partie mobile de masse $m$ est donc:
Bilkzzzm
soit
Bilvdtkzzm (4.59)
où v est la vitesse de la bobine.
D'autre part, la bobine est le siège d'une (f.e.m) donnée par:
vBluuuvBdludluBuvldBvebobine
rz
bobine
rz
bobine
i
.
(4.60)
La loi d'Ohm permet d'écrire:
Ridt
diLeU i
(4.61)
U est la différence de potentiel aux bornes de la bobine et ie la force électromotrice
induite (f.e.m) par le déplacement d'un fil conducteur (bobine) dans un champ
magnétique.
On peut voir la chose de la manière suivante: le flux coupé par un élément de longueur
dl du fil au cours d'un déplacement dz de la partie mobile est Bdldz et le flux total:
Bldzd (4.62)
Il en résulte une (f.e.m) induite:
Blvdt
dei
(4.63)
L'équation de la somme des tensions dans le circuit fermé s'écrit donc:
Ridt
diLBlvU

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 121
Soit
Ridt
diLBlvU
(4.64)
Les deux équations ci-dessus couplent les variables v et i du problème.
Si la d.d.p (différence de potentiel) est une fonction sinusoïdale du temps:
tjeUtU 20 (4.65)
le courant s’écrit
tjtj eIeIti 22 0
)(
0
(4.66)
et la vitesse de la bobine:
tjtj eVeVtv 22 0
)(
0
(4.67)
En remplaçant v et i par leurs valeurs on obtient:
00 IBlVm
kjjm
(4.68)
La représentation complexe a permis de mettre en évidence l'impédance mécanique:
m
kmjZ m
(4.69)
On peut alors écrire:
mZ
IBlV 0
0
(4.70)
L'équation ci-dessus devient:
IRjLZ
IlBU
m
22
(4.71)
RjLZ est l'impédance électrique de la bobine. D'où
IZZ
lBU
m
22
(4.72)

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 122
Notons que m
motZ
lBZ
22 a les dimensions d'une impédance électrique; c'est
l'impédance motionnelle. On peut écrire
IZU e (4.73)
eZ est l'impédance d'entrée du haut parleur, égale à jLZ
lBR
m
22
ou encore
jL
m
kmj
lBRZ e
22
(4.74)
Nous pouvons alors définir une « efficacité » du haut-parleur comme le quotient:
emZZ
Bl
U
V
(4.75)
Cette efficacité dépend de la fréquence, ce qui indique que le haut -parleur ne restitue
pas toutes les fréquences (donc tous les sons) de la même façon.

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 123
Il faut retenir que :
L’oscillation forcée est régie par l’équation différentielle :
)()()(2)( 2
0 thtptptp
Il existe deux régimes :
Le régime transitoire :
La solution totale du système est :
)t(p)t(p)t(p pg
Où )t(pg et )t(p p représentent respectivement la solution générale la solution
particulière
Le régime permanent caractérisé par le phénomène :
« La résonance »
la solution du système est de la forme :
)()( tptp p
Il faut signaler que la force extérieure absorbe les pertes du
système due aux forces de frottements.
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 124
Travail pratique
Système amorti forcé : pendule de Pohl
Mots clés :
Fréquence angulaire, fréquence caractéristique, fréquence de résonance, pendule de
torsion, vibrations de torsion, couple et le couple de rappel, oscillations libres amorties
et non amorties, oscillations forcées, coefficient d'atténuation, décrément,
constante d'amortissement, décrément logarithmique, cas apériodique, cas limite
apériodique.
Principe de l'expérience:
Si on laisse un système oscillant osciller librement, on observe que la diminution des
amplitudes maximales successives est fortement dépendante de l'amortissement. Si le
système oscillant est excité par un couple extérieur périodique, on observe qu'à l'état
d'équilibre l'amplitude dépend de la fréquence et de l'amplitude, du couple extérieur
périodique et de l'amortissement. La fréquence caractéristique des oscillations libres
ainsi que la courbe de résonance des oscillations forcées pour différentes valeurs
d'amortissement seront déterminées.
Liste du matériel:
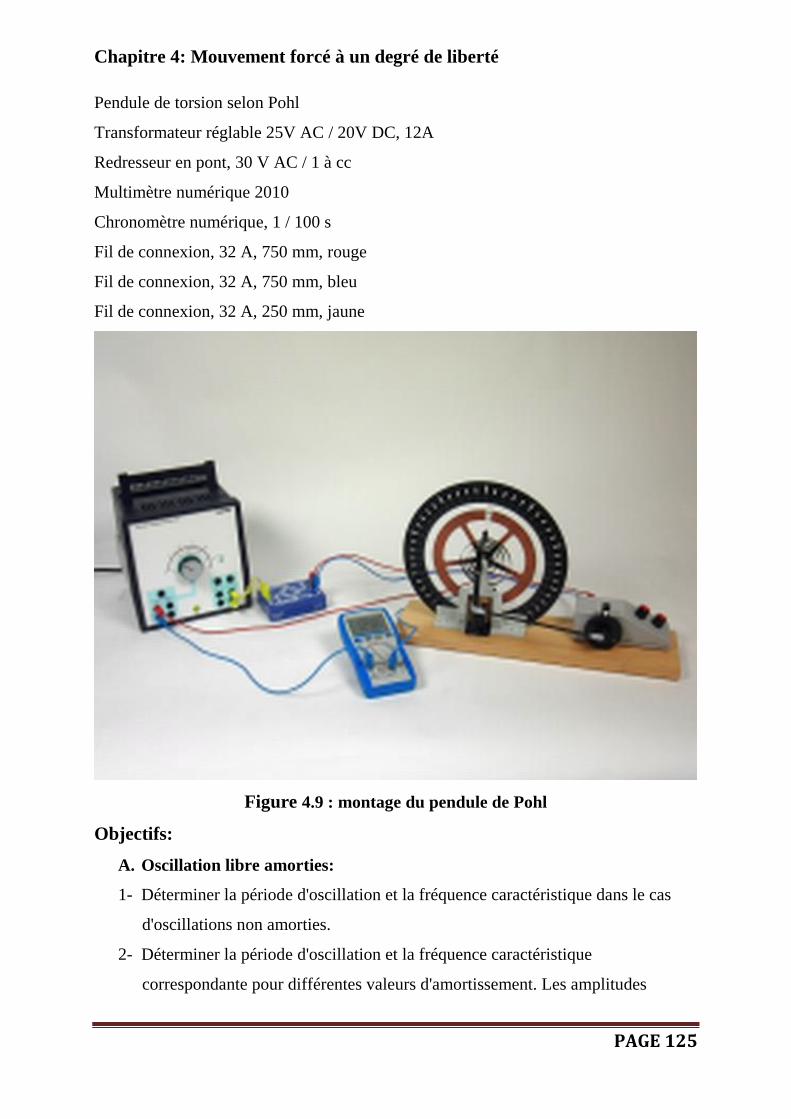
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 125
Pendule de torsion selon Pohl
Transformateur réglable 25V AC / 20V DC, 12A
Redresseur en pont, 30 V AC / 1 à cc
Multimètre numérique 2010
Chronomètre numérique, 1 / 100 s
Fil de connexion, 32 A, 750 mm, rouge
Fil de connexion, 32 A, 750 mm, bleu
Fil de connexion, 32 A, 250 mm, jaune
Figure 4.9 : montage du pendule de Pohl
Objectifs:
A. Oscillation libre amorties:
1- Déterminer la période d'oscillation et la fréquence caractéristique dans le cas
d'oscillations non amorties.
2- Déterminer la période d'oscillation et la fréquence caractéristique
correspondante pour différentes valeurs d'amortissement. Les amplitudes
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 126
maximales successives et unidirectionnelles seront représentées graphiquement
en fonction du temps. Le coefficient d'atténuation, la constante d'amortissement
et le décrément logarithmique correspondants seront calculés.
3- Réaliser le cas apériodique et le cas limite apériodique.
B. Oscillation forcée:
1- Déterminer et représenter graphiquement les courbes de résonance à l'aide des
valeurs d'amortissement de l’amplitude.
2- Déterminer les fréquences de résonance et les comparer avec les valeurs de la
fréquence de résonance déjà calculées.
3- Observer le déphasage entre le pendule de torsion et le couple extérieur de
stimulation pour une faible valeur d'amortissement, pour autant que, dans un
premier cas, la fréquence de stimulation soit largement inférieure à la fréquence
de résonance et que, dans un autre cas, elle soit largement supérieure.
Montage:
Un pendule de Pohl est constitué d'un:
1- disque en rotation autour de son centre.
2- ressort spiral, qui exerce un couple mécanique qui tend à ramener le disque vers
sa position d'équilibre.
3- pointeur placé sur le disque qui permet de repérer les écarts angulaires.
4- moteur, relié au ressort spiral, qui force les oscillations à une fréquence
ajustable par l'utilisateur.
5- frein électromagnétique, permettant de régler l'effet d'amortissement (par
courants de Foucault).
L'unité d'alimentation en énergie est connectée à un moteur à courant continu. Le frein
à courants de Foucault doit être également connecté à une tension continue. Pour cette
raison, un redresseur est inséré entre la sortie de l'unité d'alimentation et l'entrée du
frein à courants de Foucault. Le courant continu fourni au frein à courants de Foucault,
BI , est indiqué par l'ampèremètre.
Étude théorique:
A. Oscillation libre amortie:

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 127
Le système est modélisé comme un système libre amorti, où un disque de moment
d'inertie zI par rapport à l'axe de rotation passant par son centre subit:
a- un couple mécanique d'un ressort spiral proportionnel à l'angle de rotation .
b- un couple de freinage électromagnétique proportionnel à la vitesse angulaire .
1- Montrer que l'équation différentielle de mouvement du disque s'écrit comme:
0 CDI z
où D est un coefficient de proportionnalité qui dépend du courant alimentant le
freinage du disque et C le coefficient de torsion du ressort.
2- En définissant les quantités suivantes:
- facteur d'amortissement: zI
D
2 .
- pulsation propre du système non amorti: zI
C0
montrer que l'équation de mouvement ci-dessus devient:
02 2
0
3- Quels types de solutions cette équation admet-elle?
4- Montrer que la solution de l'équation ci-dessus s'écrit sous la forme ( 0 ):
tet a
t cos0
avec 22
0 a .
5- Quel sens physique peut-on donner à: a , 0 et .
6- Commenter le comportement du système.
7- Montrer que le rapport entre deux amplitudes consécutives est donné par:
aT
n
n eK
1
où a
aT
2 est la pseudo-période et K . On définit le décrément logarithmique
comme:

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 128
a
n
n TK
1
lnln
B. oscillation forcée:
Le pendule est maintenant soumis à un couple périodique tMtM a cos0 .
1- Montrer que l'équation différentielle du mouvent s'écrit:
tI
M
z
cos2 02
0
2- Montrer qu'en régime permanent la solution de cette équation s'écrit:
tAtp cos
avec
22222
0
0
4
1
zI
MA
et
22
0
2
arctg
Étude expérimentale:
1- Détermination de la fréquence propre du système
Pour déterminer la pulsation propre 0 du pendule de torsion sans amortissement BI ,
le temps pendant une oscillation complète est mesuré à trois reprises pour trois
différentes valeurs d'amplitudes (18 , 14 et 10) et la valeur moyenne de la période 0T
est calculée.
N° MoyT0 MoyT0
sT0
1- Écrire la valeur de la pulsation propre sous la forme: 0 (unité).
2- La valeur mesurée de 0 représente-t-elle la valeur exacte de la pulsation
propre du système? Expliquer.
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 129
3- La valeur de 0 est-elle la même pour les trois amplitudes? Que peut-on
conclure?
2- Oscillation libre amortie :
De la même manière, les fréquences caractéristiques pour les oscillations amorties sont
mesurées en utilisant les intensités suivantes pour le frein à courants de Foucault:
VUAIB 4,25.0
VUAIB 8,55.0
VUAIB 12,90.0
Pour déterminer les valeurs d'amortissement pour les cas mentionnés ci-dessus la
baisse en amplitude (en unité de graduation) est mesurée en déviant à la main le
pointeur du pendule à la valeur 18 tout en prélevant les valeurs des amplitudes
successives de rotation ainsi que les temps de passage jusqu'à ce que le mouvement du
disque s'évanouisse complètement.
Au départ, il faut veiller à ce que le pointeur du pendule au repos coïncide
avec la position zéro de l'échelle. Ceci peut être réalisé en faisant tourner le disque
excentrique du moteur.
1- Pour chaque valeur de l'intensité du courant, compléter le tableau suivant:
temps
t
2- Tracer sur la même feuille millimétrée les amplitudes d'oscillations en fonction
du temps pour chaque valeur d'intensité du courant électrique.
3- Que peut-on dire de la nature du mouvement exécuté par le système?
4- Vérifier si le dispositif à votre disposition peut permettre au disque d'exécuter
un mouvement apériodique.
5- Proposer une méthode graphique qui permet de mesurer la valeur de en se
basant sur les valeurs du tableau ci-dessus.
6- Compléter le tableau suivant:
AIB sTa K 1s a
0.25
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 130
0.55
0.90
3- Oscillation amortie forcée :
Pour l'étude de la réponse du système à une excitation externe, on utilise un moteur à
courant continu qui va fournir un moment de force à une amplitude constante et une
fréquence réglable. La tension U de l'unité d'alimentation en courant continu doit être
réglée au maximum. La fréquence d'excitation est augmentée au moyen d'un
potentiomètre de calibres différents. La tension motU délivrée par le moteur est prise
comme échelle de variation des fréquences du moteur.
\begin{enumerate}
1- Pour les valeurs d'intensité suivantes 40.0,25.0BI ampères, varier les valeurs
des fréquences du moteur et reporter les amplitudes de rotation du disque
dans le tableau suivant:
VU mot
1. srad
2- Vérifier que le disque met du temps avant de passer à un mouvement
harmonique de pulsation égale à celle de la roue du moteur. Qu'appelle-t-on ce
régime?
3- Tracer sur la même feuille millimétrée les amplitudes d'oscillations en fonction
de pour chaque valeur d'intensité BI .
4- Définir pour chaque cas d'amortissement la valeur de pour laquelle
l'amplitude est maximale.
5- Qu'appelle-t-on cette pulsation?
6- Dans le cas d'un amortissement nul, faites exécuter au système un mouvement
forcé à une pulsation égale à la pulsation propre du système. Que peut-on
conclure?

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 131
7- Proposer une méthode pratique pour la mesure du déphasage entre l'excitation
du moteur et la réponse du disque.

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 132
Applications
Problème 1:
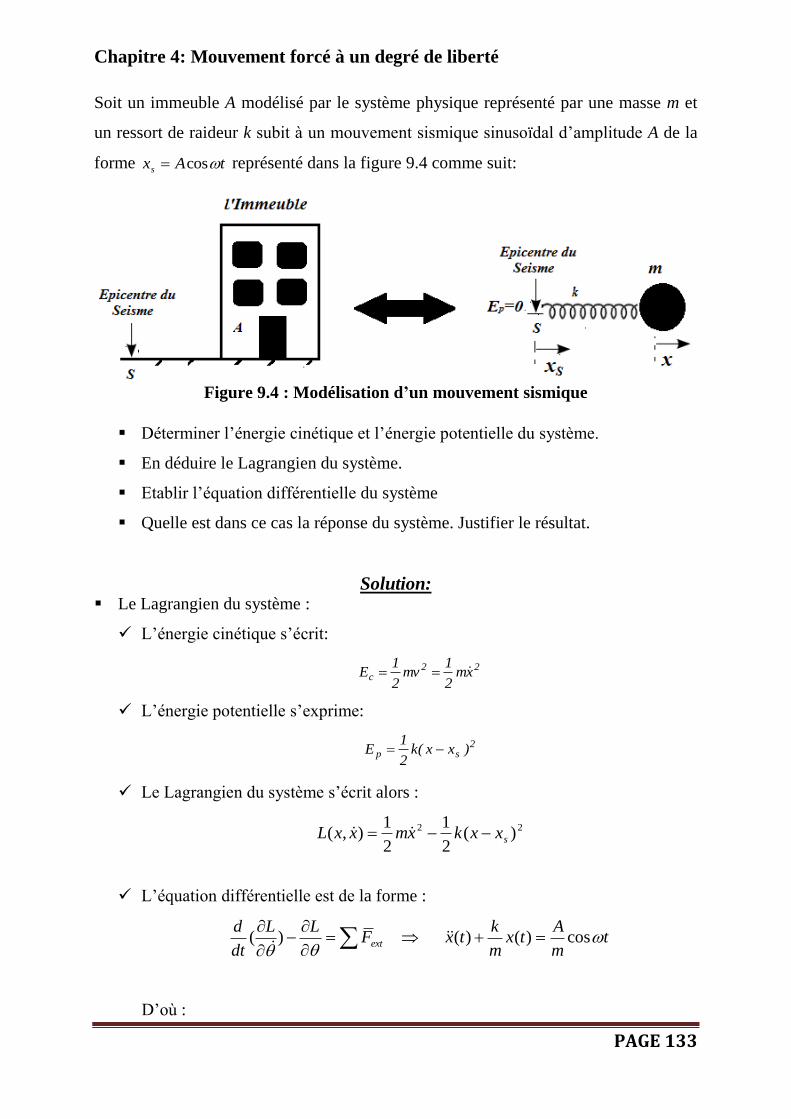
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 133
Soit un immeuble A modélisé par le système physique représenté par une masse m et
un ressort de raideur k subit à un mouvement sismique sinusoïdal d’amplitude A de la
forme tAxs cos représenté dans la figure 9.4 comme suit:
Figure 9.4 : Modélisation d’un mouvement sismique
Déterminer l’énergie cinétique et l’énergie potentielle du système.
En déduire le Lagrangien du système.
Etablir l’équation différentielle du système
Quelle est dans ce cas la réponse du système. Justifier le résultat.
Solution: Le Lagrangien du système :
L’énergie cinétique s’écrit:
22c xm
2
1mv
2
1E
L’énergie potentielle s’exprime:
2sp )xx(k
2
1E
Le Lagrangien du système s’écrit alors :
22 )(2
1
2
1),( sxxkxmxxL
L’équation différentielle est de la forme :
tm
Atx
m
ktxF
LL
dt
dext
cos)()()(
D’où :
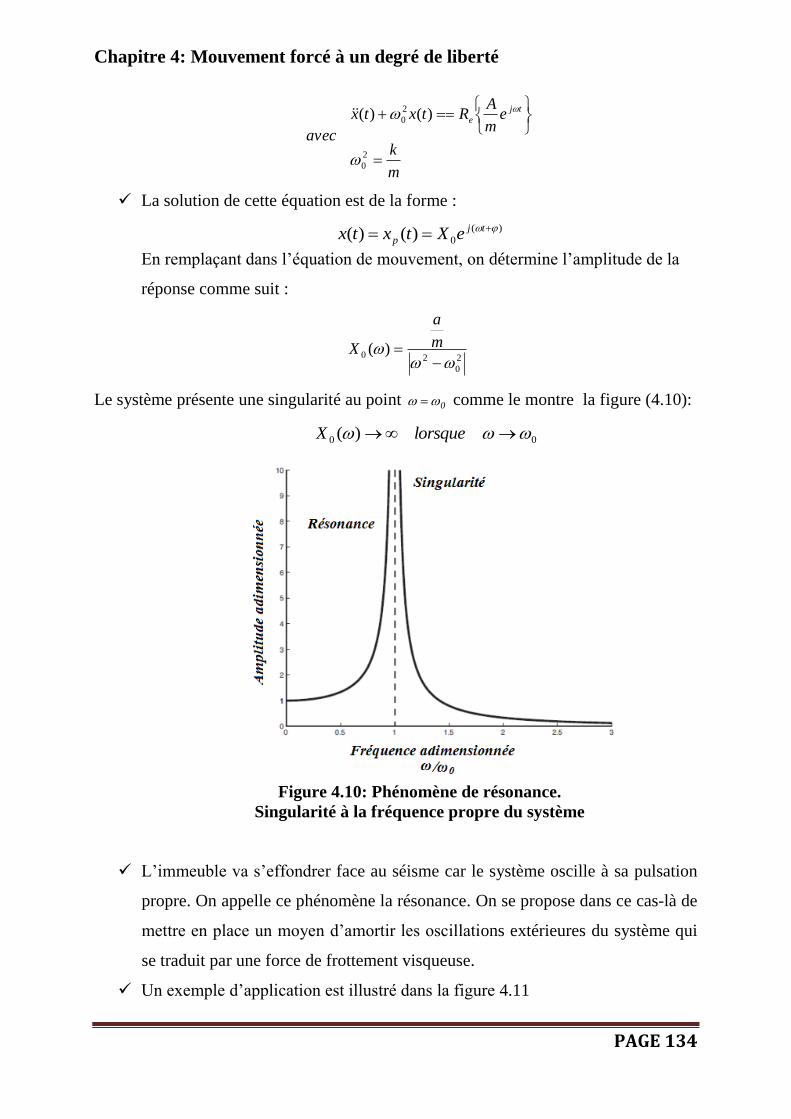
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 134
m
k
em
ARtxtx
avec
tj
e
2
0
2
0 )()(
La solution de cette équation est de la forme :
)(
0)()( tj
p eXtxtx
En remplaçant dans l’équation de mouvement, on détermine l’amplitude de la
réponse comme suit :
2
0
20 )(
m
a
X
Le système présente une singularité au point 0 comme le montre la figure (4.10):
00 )( lorsqueX
Figure 4.10: Phénomène de résonance.
Singularité à la fréquence propre du système
L’immeuble va s’effondrer face au séisme car le système oscille à sa pulsation
propre. On appelle ce phénomène la résonance. On se propose dans ce cas-là de
mettre en place un moyen d’amortir les oscillations extérieures du système qui
se traduit par une force de frottement visqueuse.
Un exemple d’application est illustré dans la figure 4.11
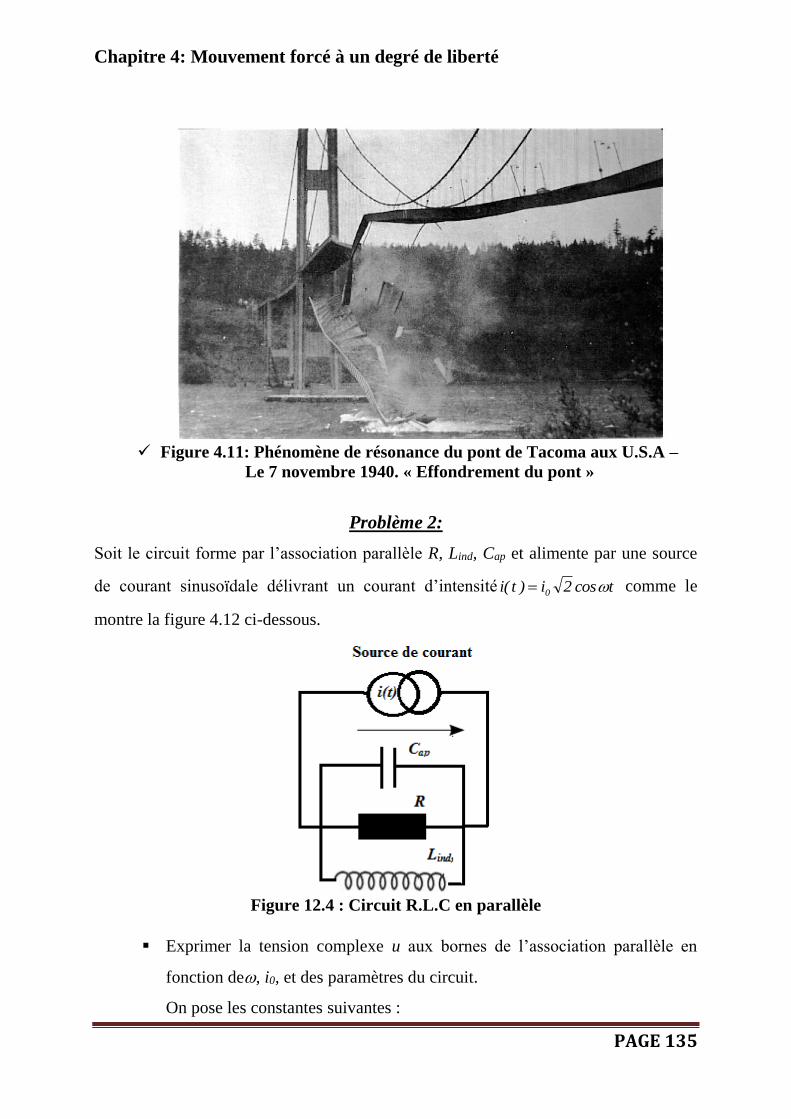
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 135
Figure 4.11: Phénomène de résonance du pont de Tacoma aux U.S.A –
Le 7 novembre 1940. « Effondrement du pont »
Problème 2:
Soit le circuit forme par l’association parallèle R, Lind, Cap et alimente par une source
de courant sinusoïdale délivrant un courant d’intensité tcos2i)t(i 0 comme le
montre la figure 4.12 ci-dessous.
Figure 12.4 : Circuit R.L.C en parallèle
Exprimer la tension complexe u aux bornes de l’association parallèle en
fonction de, i0, et des paramètres du circuit.
On pose les constantes suivantes :

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 136
apind
2
0CL
1 ,
0
x
Et on définit le facteur de qualité du circuit comme suit :
0apRCQ
Exprimer le module de la tension u aux bornes de l’association parallèle en
fonction de R, i0, Q et x.
Montrer que u passe par un maximum maxu pour une valeur de x à
déterminer.
Représenter sommairementmaxu
u)x(f en fonction de x.
Que retrouve t- on ?
Calculer la largeur de la bande passante.
Solution :
La tension complexe u du système est de forme :
)t(iZ~
)t(u équi
D’ou le courant est égale a :
équiZ~
)t(u)t(i
Soit équiZ~
l’impédance complexe équivalente du circuit R.L.C en parallèle
qui se calcule comme suit :
Avec :
indap
équi jL
1jC
R
1
Z~
1
D’où la tension est égale à :
)1
(1
)()(
ind
apL
CjR
tRitu
Le module de la tension s’écrit alors :
22
0
)x
1x(Q1
2Ri)t(u

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 137
On constate que :
1xlorsque2Riuu 0max
Le schéma de la fonction maxu
u)x(f est représenté dans la figure 4.9
comme suit :
22max)
x
1x(Q1
1
u
u)x(f
On obtient la résonnance lorsque x=1, c'est-à-dire :
Résonance1xsi1)x(f
Figure 4.13: Phénomène de résonnance en tension
dans le circuit R.L.C en parallèle
La bande passante se calcule comme suit :
12 xxx
En résolvant l’équation paramétrique suivante :
22 )x
1x(Q1
1
2
1
Après transformation on obtient la largeur réelle de la bande passante devient
alors:
RC
1où'dx0
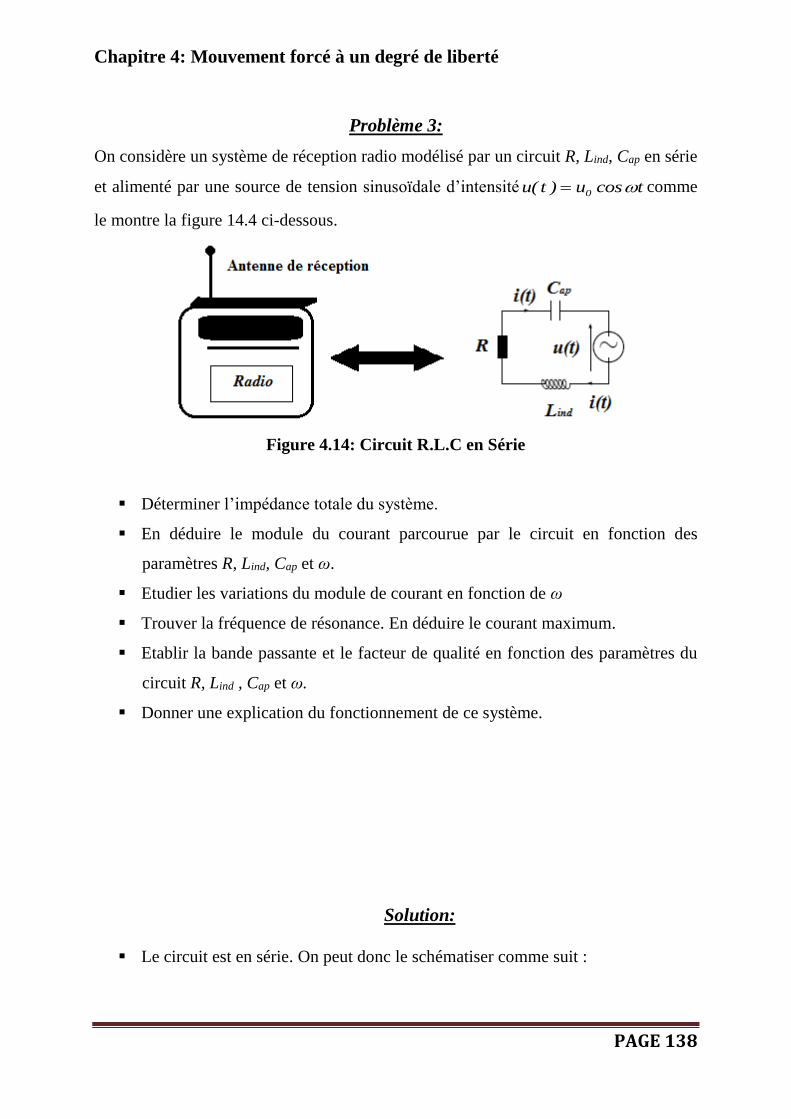
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 138
Problème 3:
On considère un système de réception radio modélisé par un circuit R, Lind, Cap en série
et alimenté par une source de tension sinusoïdale d’intensité tcosu)t(u 0 comme
le montre la figure 14.4 ci-dessous.
Figure 4.14: Circuit R.L.C en Série
Déterminer l’impédance totale du système.
En déduire le module du courant parcourue par le circuit en fonction des
paramètres R, Lind, Cap et ω.
Etudier les variations du module de courant en fonction de ω
Trouver la fréquence de résonance. En déduire le courant maximum.
Etablir la bande passante et le facteur de qualité en fonction des paramètres du
circuit R, Lind , Cap et ω.
Donner une explication du fonctionnement de ce système.
Solution:
Le circuit est en série. On peut donc le schématiser comme suit :
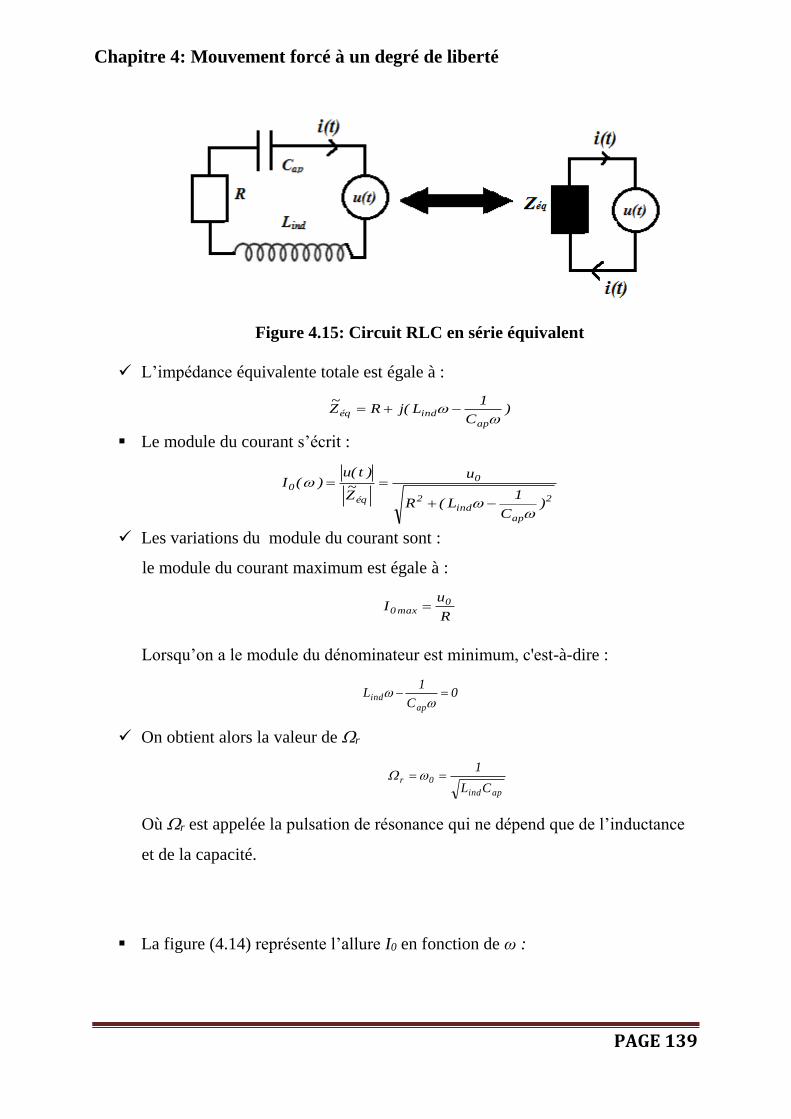
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 139
Figure 4.15: Circuit RLC en série équivalent
L’impédance équivalente totale est égale à :
)C
1L(jRZ
~
apindéq
Le module du courant s’écrit :
2
apind
2
0
éq
0
)C
1L(R
u
Z~
)t(u)(I
Les variations du module du courant sont :
le module du courant maximum est égale à :
R
uI 0
max0
Lorsqu’on a le module du dénominateur est minimum, c'est-à-dire :
0C
1L
apind
On obtient alors la valeur de r
apind
0rCL
1
Où r est appelée la pulsation de résonance qui ne dépend que de l’inductance
et de la capacité.
La figure (4.14) représente l’allure I0 en fonction de ω :

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 140
Figure 4.16: Phénomène de résonance en courant
dans le circuit R.L.C en série
La bande passante est définie comme:
12
En résolvant l’équation paramétrique suivante:
2
apind
2
0max0
)C
1L(R
u
2
I
On obtient :
ind12
L
R
Le facteur de qualité s’écrit
R
LQ 0ind0
L’application technique de ce phénomène est la sélection des fréquences de
résonance pour différentes stations de radio.
Problème 4:
On définit le modèle d’un oscillateur harmonique, montré sur la figure 4.17,
représentée par une masse m placée dans un potentiel élastique de type : 2
2
1kxEp
Cette masse est soumise à une force de frottement visqueuse et dont le coefficient de
frottement est α.
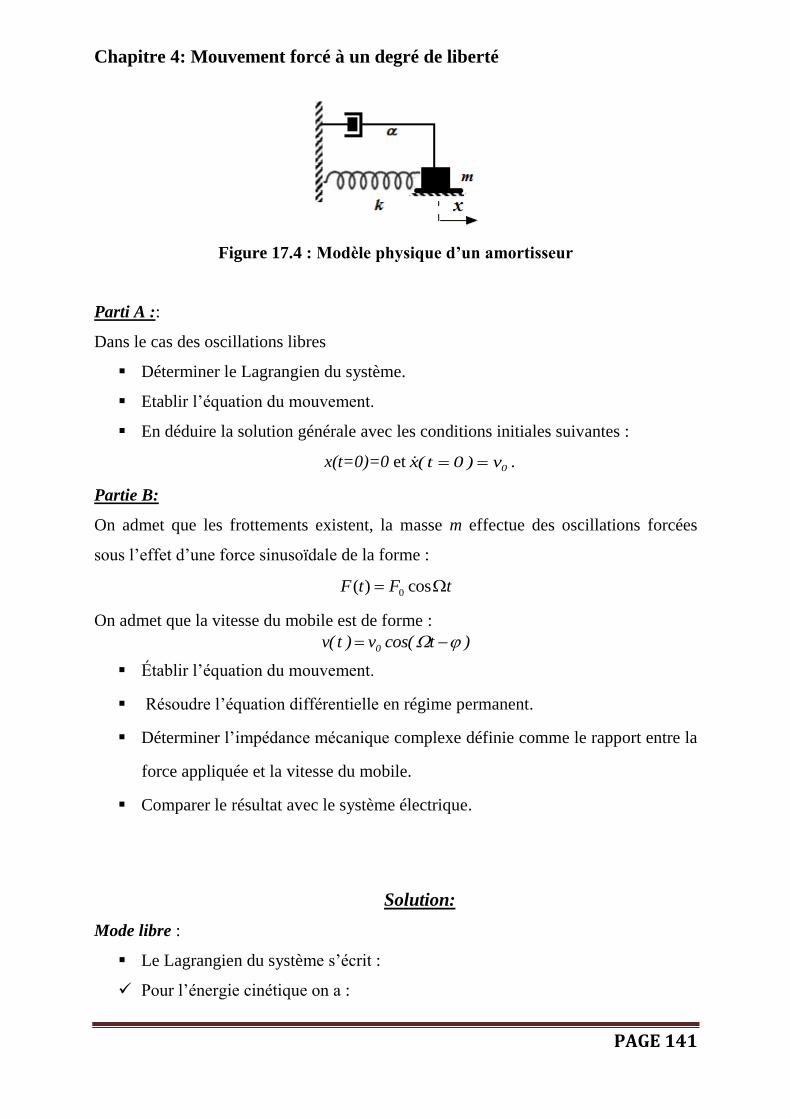
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 141
Figure 17.4 : Modèle physique d’un amortisseur
Parti A ::
Dans le cas des oscillations libres
Déterminer le Lagrangien du système.
Etablir l’équation du mouvement.
En déduire la solution générale avec les conditions initiales suivantes :
x(t=0)=0 et 0v)0t(x .
Partie B:
On admet que les frottements existent, la masse m effectue des oscillations forcées
sous l’effet d’une force sinusoïdale de la forme :
tFtF cos)( 0
On admet que la vitesse du mobile est de forme :
)tcos(v)t(v 0
Établir l’équation du mouvement.
Résoudre l’équation différentielle en régime permanent.
Déterminer l’impédance mécanique complexe définie comme le rapport entre la
force appliquée et la vitesse du mobile.
Comparer le résultat avec le système électrique.
Solution:
Mode libre :
Le Lagrangien du système s’écrit :
Pour l’énergie cinétique on a :

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 142
2c xm
2
1E
Et pour l’énergie cinétique on a
2p kx
2
1E
Alors, le Lagrangien du système s’écrit :
22
2
1
2
1),( kxxmxxL
L’équation du mouvement :
m
kavectxxkxxm 2
0
2
0 0)(0
La solution générale est de la forme :
tsinv
)t(x 0
0
0
Mode forcé :
L’équation du mouvement s’écrit sous la forme:
)(tFkxxxm
D’où
m
k
mavec
m
tFxxx
2
0
2
0
2)(
2
C’est une équation différentielle inhomogène linéaire, d’un mouvement force.
La résolution de cette équation différentielle en régime permanent est :
)t(j
ep AeR)tcos(A)t(x)t(x
Soient A l’amplitude de la solution et son argument.
En remplaçant dans l’équation différentielle et après le calcul, on obtient
Le module d’amplitude suivant :
222
0
2
0
)2()()(
m
F
A
Et la phase du mouvement comme suit :

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 143
20
2
2tan
Les variations de )(A sont déterminées par :
22r 20
d
)(dA
Cette pulsation est appelée la pulsation de résonance.
L’impédance complexe est définit comme suit :
)(
)(~
tv
tFZmécani
En remplaçant dans l’équation du mouvement, on obtient:
)k
m(jZ~
mécani
Pour le système électrique, le résultat est donné comme suit:
)C
1L(jRZ
~
)t(i
)t(uZ~
apindélectriélectri
On conclue donc les équivalences entre le système mécanique et le système
électrique comme suit :
ap
ind
C
1k
Lm
R
Problème 5:
Lorsqu’un moteur électrique fonctionne, il présente des vibrations naturelles qu’il est
nécessaire d’amortir pour éviter de les transmettre a son châssis. On prévoit donc un
système de suspension.
Le moteur est assimile au point matériel m de masse m pouvant se déplacer
parallèlement à l’axe vertical Oz. La suspension le reliant au châssis est modélisée par
un ressort de longueur à vide l0 et de raideur k en parallèle avec un amortisseur
exerçant sur le moteur une force de freinage zfr uzf
Le châssis reste fixe dans un référencier galiléen et on note le champ de pesanteur g

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 144
Figure 18.4 : Etude des vibrations d’un moteur
Mode A :
Le moteur ne fonctionne pas et il est immobile.
Déterminer dans ce cas la longueur l du ressort. On prend la référence z=0 au
point m.
Mode B :
Le moteur étant toujours arrêté, on l’écarte de sa position d’équilibre puis on le laisse
évoluer librement.
Déterminer le Lagrangien du système.
Établir l’équation différentielle du mouvement vérifiée par z(t).
On pose les constantes suivantes :
m
k2
0 et 0m2
Donner la forme de la solution générale z(t) en fonction des paramètres ν et ω0,
on suppose que ν<1.
Comment appelle-t-on ce régime ?
Écrire l’expression de l’énergie totale ET en fonction de z(t) et dt
)t(dz
Que vaut-t-il la valeur de l’expressiondt
dET . Le système est-il conservatif ?
Mode C :

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 145
Le moteur fonctionne, et tout se passe comme s’il apparaissait une force
supplémentaire de forme : z0 utcosF)t(F
Établir la nouvelle équation du mouvement vérifiée par z(t)
En régime permanent, on cherche des solutions de la forme
)tcos(V)t(etV)tcos(z)t(z 00
Donner l’expression de la grandeur ieVV 0
Exprimer l’amplitude V0 en fonction de ω et des paramètres v, ω0 et F0/m.
Donner l’allure de V0 (ω).
Application numérique: la pulsation ω vaut 628 rad/s, le moteur a une masse
m=10kg. On dispose de deux ressorts de raideurs k1=4 106n/m et k2=106n/m.
lequel faut-il choisir pour réaliser la suspension ?
Solution :
Mode A :
Le système est en équilibre
La longueur du ressort :
k
mgll0F 0
1i
i
Mode B :
Le système est en mouvement amorti
Le Lagrangien du système :
22 kz2
1zm
2
1L
L’équation différentielle :
0kzzzm0z
L
z
L
dt
d
D’ou :
0
20
200
m2m
kAvec0zz2z
La résolution de l’équation du mouvement :
10j)1()(
0r2r
222
0
2
0
2
0
2
00
2

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 146
Le système a un mouvement oscillatoire amorti.
La solution est de la forme :
)tcos(Ae)t(zt0
l’énergie totale du système s’écrit sous la forme:
22T kz
2
1)
dt
dz(m
2
1)t(E
A partir de l’équation du mouvement, on obtient :
0zdt
)t(dE]zkzzm[z 2T
Le système n’est pas conservatif car il y a déperdition de l’énergie totale. Cette
diminution est due au travail des forces de frottement.
Mode C :
Le système est en mouvement forcé
L’équation du mouvement s’écrit :
)t(Fkzzzm
D’où :
m
)t(Fzz2z 2
00
Avec :
0
20
m2m
k
La solution de l’équation différentielle est :
)t(zj)t(zj
)t(z)t(zAvec
eVR)tcos(V)t(V)t(z )t(j0e0
En remplaçant dans l’équation du mouvement on obtient alors :
tj
2
20
0
0
e
)1(j2
m
F
)t(V
Le module de la vitesse est de la forme :
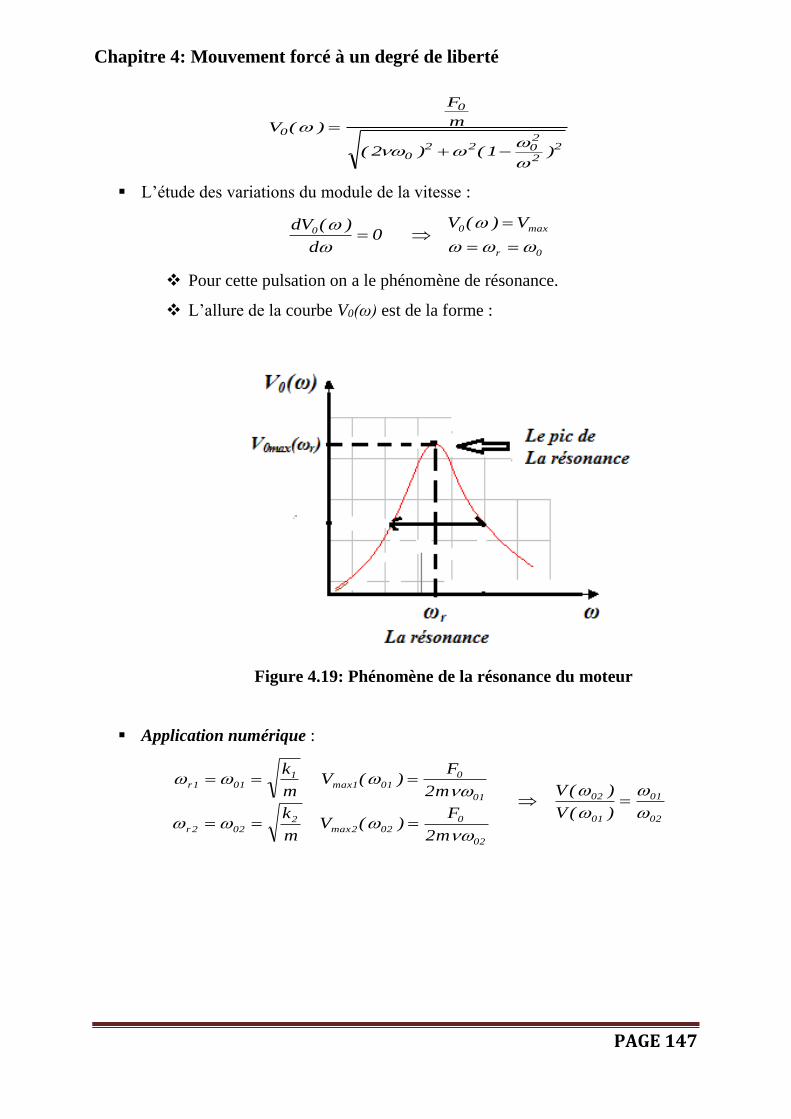
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 147
2
2
2022
0
0
0
)1()2(
m
F
)(V
L’étude des variations du module de la vitesse :
0r
max00V)(V
0d
)(dV
Pour cette pulsation on a le phénomène de résonance.
L’allure de la courbe V0(ω) est de la forme :
Figure 4.19: Phénomène de la résonance du moteur
Application numérique :
02
01
01
02
02
0022max
2022r
01
0011max
1011r
)(V
)(V
m2
F)(V
m
k
m2
F)(V
m
k
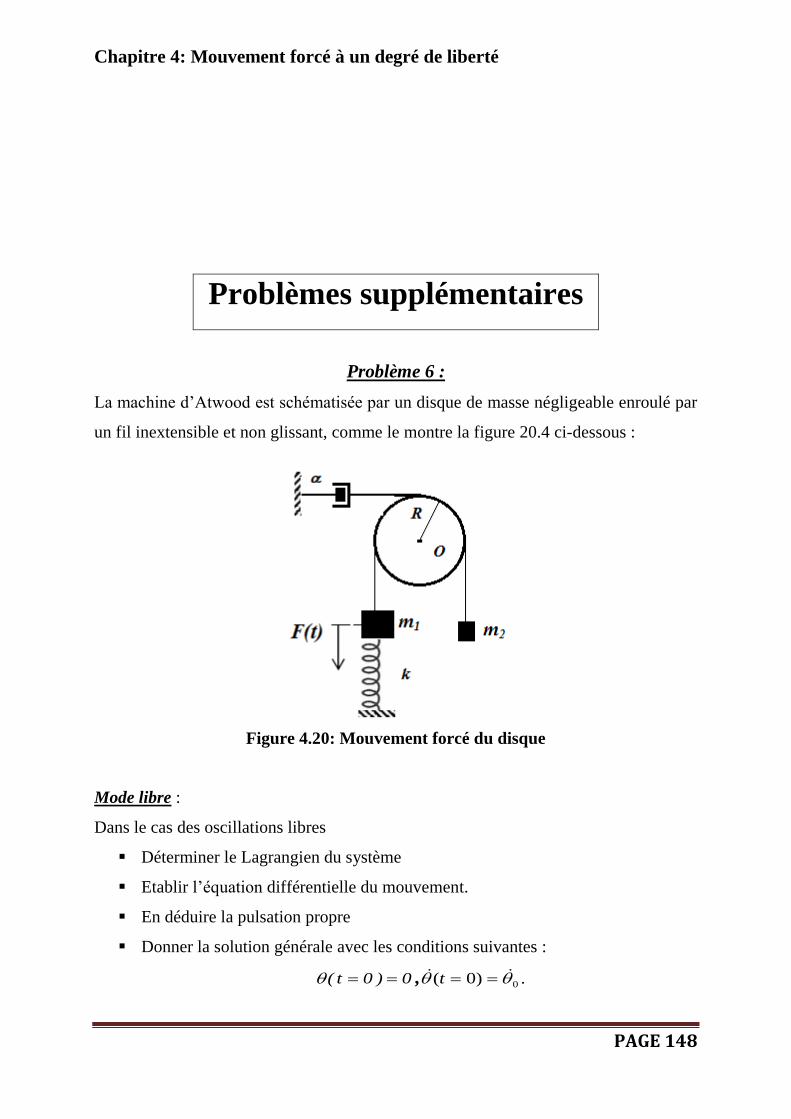
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 148
Problèmes supplémentaires
Problème 6 :
La machine d’Atwood est schématisée par un disque de masse négligeable enroulé par
un fil inextensible et non glissant, comme le montre la figure 20.4 ci-dessous :
Figure 4.20: Mouvement forcé du disque
Mode libre :
Dans le cas des oscillations libres
Déterminer le Lagrangien du système
Etablir l’équation différentielle du mouvement.
En déduire la pulsation propre
Donner la solution générale avec les conditions suivantes :
0)0t( , 0)0( t .
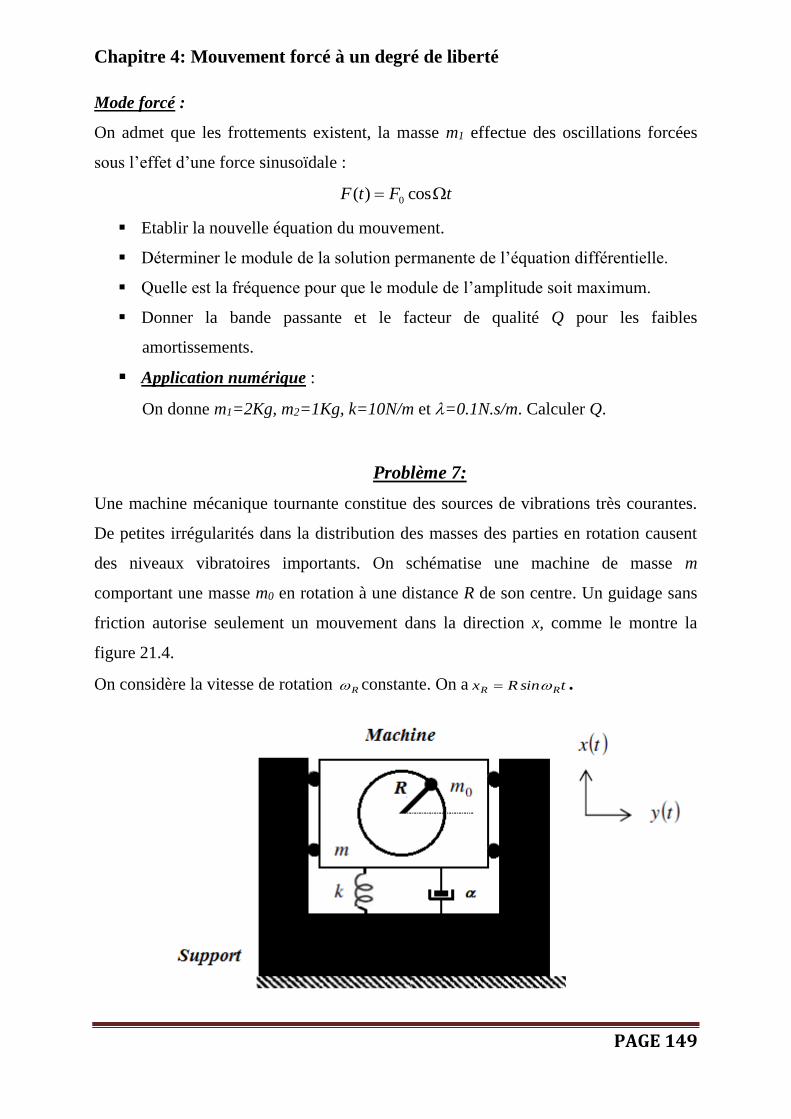
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 149
Mode forcé :
On admet que les frottements existent, la masse m1 effectue des oscillations forcées
sous l’effet d’une force sinusoïdale :
tFtF cos)( 0
Etablir la nouvelle équation du mouvement.
Déterminer le module de la solution permanente de l’équation différentielle.
Quelle est la fréquence pour que le module de l’amplitude soit maximum.
Donner la bande passante et le facteur de qualité Q pour les faibles
amortissements.
Application numérique :
On donne m1=2Kg, m2=1Kg, k=10N/m et =0.1N.s/m. Calculer Q.
Problème 7:
Une machine mécanique tournante constitue des sources de vibrations très courantes.
De petites irrégularités dans la distribution des masses des parties en rotation causent
des niveaux vibratoires importants. On schématise une machine de masse m
comportant une masse m0 en rotation à une distance R de son centre. Un guidage sans
friction autorise seulement un mouvement dans la direction x, comme le montre la
figure 21.4.
On considère la vitesse de rotation R constante. On a tsinRx RR .
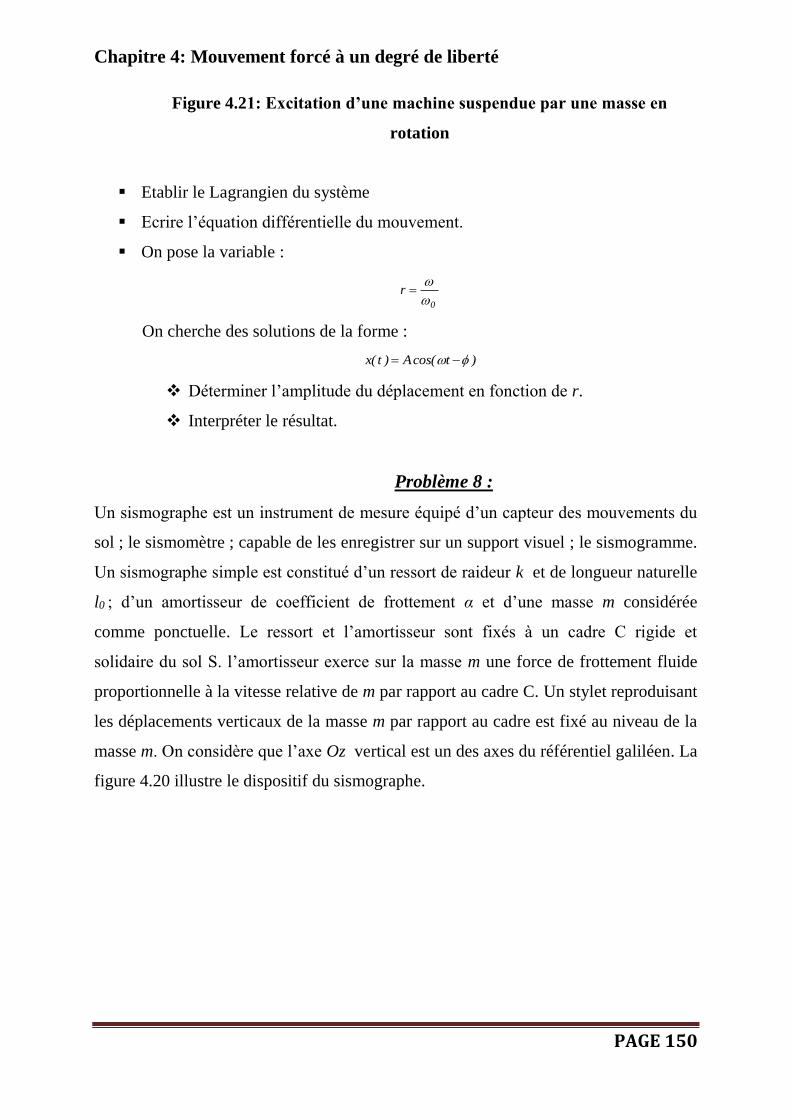
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 150
Figure 4.21: Excitation d’une machine suspendue par une masse en
rotation
Etablir le Lagrangien du système
Ecrire l’équation différentielle du mouvement.
On pose la variable :
0
r
On cherche des solutions de la forme :
)tcos(A)t(x
Déterminer l’amplitude du déplacement en fonction de r.
Interpréter le résultat.
Problème 8 :
Un sismographe est un instrument de mesure équipé d’un capteur des mouvements du
sol ; le sismomètre ; capable de les enregistrer sur un support visuel ; le sismogramme.
Un sismographe simple est constitué d’un ressort de raideur k et de longueur naturelle
l0 ; d’un amortisseur de coefficient de frottement α et d’une masse m considérée
comme ponctuelle. Le ressort et l’amortisseur sont fixés à un cadre C rigide et
solidaire du sol S. l’amortisseur exerce sur la masse m une force de frottement fluide
proportionnelle à la vitesse relative de m par rapport au cadre C. Un stylet reproduisant
les déplacements verticaux de la masse m par rapport au cadre est fixé au niveau de la
masse m. On considère que l’axe Oz vertical est un des axes du référentiel galiléen. La
figure 4.20 illustre le dispositif du sismographe.
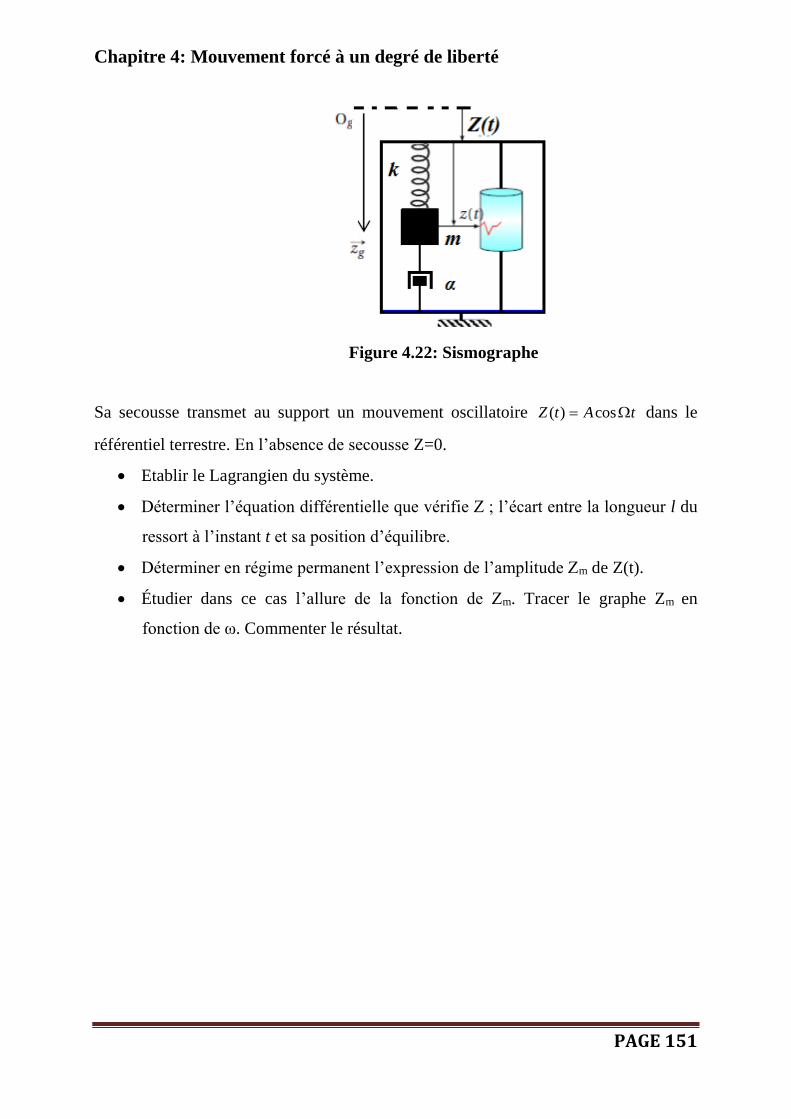
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 151
Figure 4.22: Sismographe
Sa secousse transmet au support un mouvement oscillatoire tAtZ cos)( dans le
référentiel terrestre. En l’absence de secousse Z=0.
Etablir le Lagrangien du système.
Déterminer l’équation différentielle que vérifie Z ; l’écart entre la longueur l du
ressort à l’instant t et sa position d’équilibre.
Déterminer en régime permanent l’expression de l’amplitude Zm de Z(t).
Étudier dans ce cas l’allure de la fonction de Zm. Tracer le graphe Zm en
fonction de ω. Commenter le résultat.
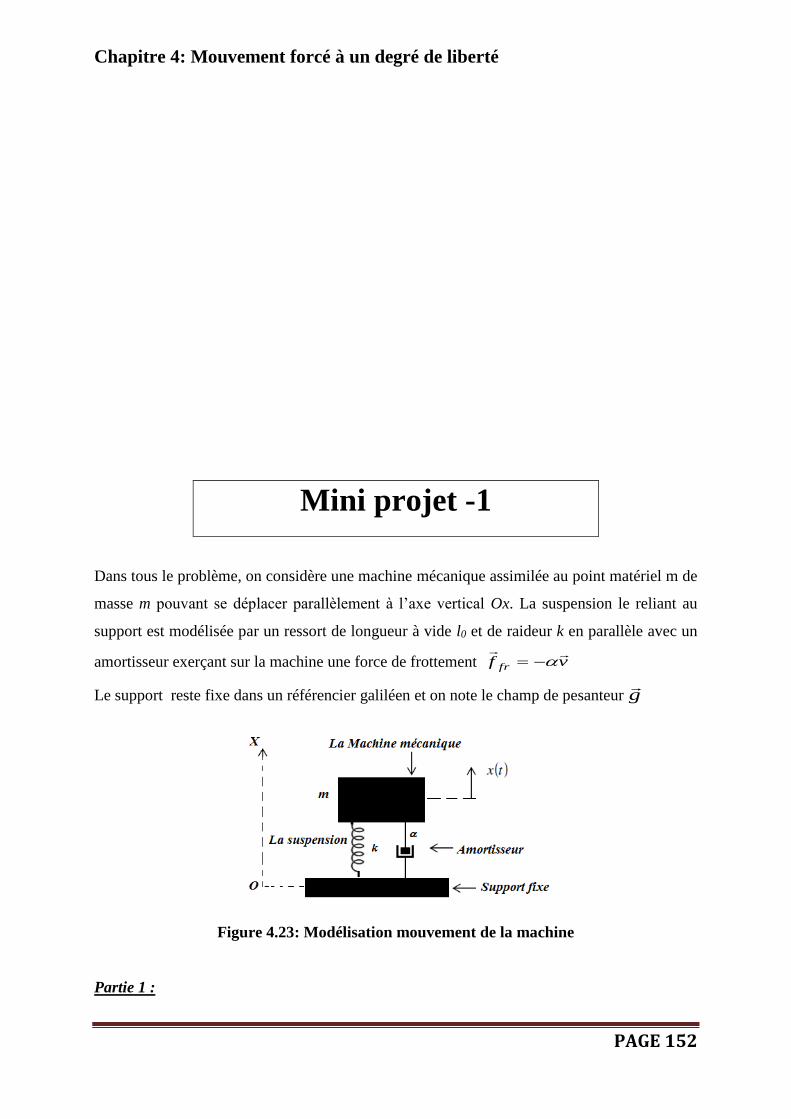
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 152
Mini projet -1
Dans tous le problème, on considère une machine mécanique assimilée au point matériel m de
masse m pouvant se déplacer parallèlement à l’axe vertical Ox. La suspension le reliant au
support est modélisée par un ressort de longueur à vide l0 et de raideur k en parallèle avec un
amortisseur exerçant sur la machine une force de frottement vf fr
Le support reste fixe dans un référencier galiléen et on note le champ de pesanteur g
Figure 4.23: Modélisation mouvement de la machine
Partie 1 :
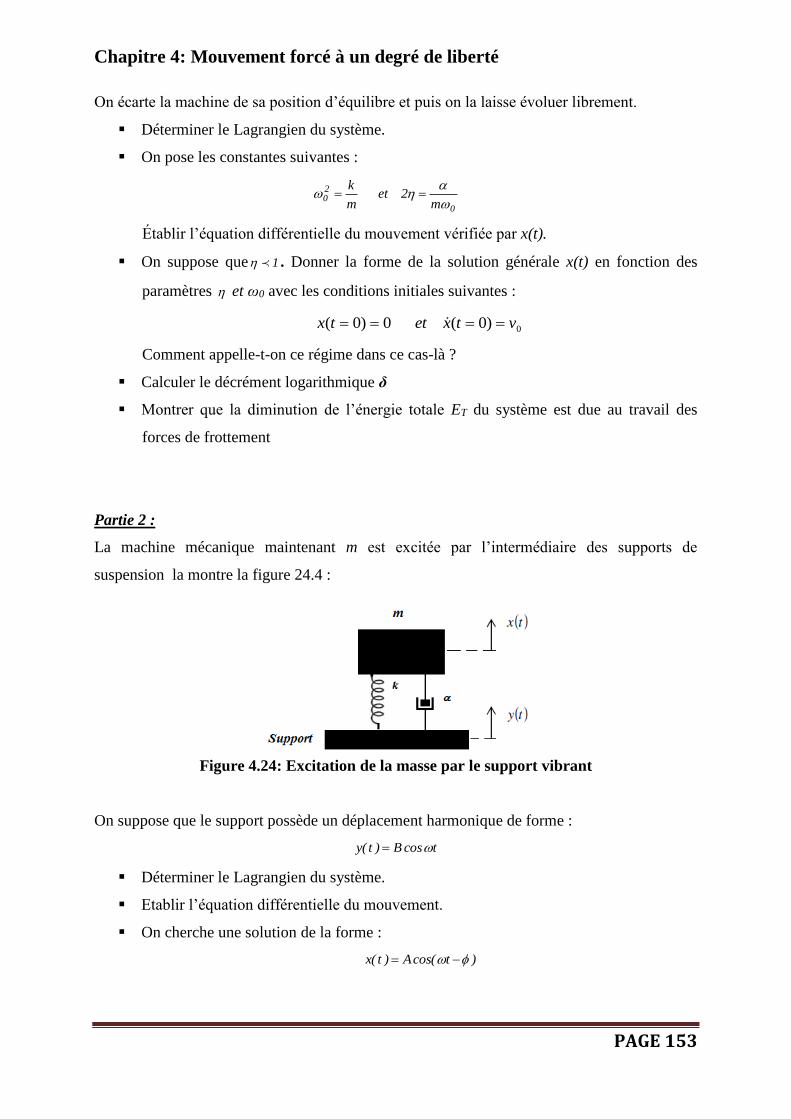
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 153
On écarte la machine de sa position d’équilibre et puis on la laisse évoluer librement.
Déterminer le Lagrangien du système.
On pose les constantes suivantes :
0
20
m2et
m
k
Établir l’équation différentielle du mouvement vérifiée par x(t).
On suppose que 1 . Donner la forme de la solution générale x(t) en fonction des
paramètres et ω0 avec les conditions initiales suivantes :
0)0(0)0( vtxettx
Comment appelle-t-on ce régime dans ce cas-là ?
Calculer le décrément logarithmique δ
Montrer que la diminution de l’énergie totale ET du système est due au travail des
forces de frottement
Partie 2 :
La machine mécanique maintenant m est excitée par l’intermédiaire des supports de
suspension la montre la figure 24.4 :
Figure 4.24: Excitation de la masse par le support vibrant
On suppose que le support possède un déplacement harmonique de forme :
tcosB)t(y
Déterminer le Lagrangien du système.
Etablir l’équation différentielle du mouvement.
On cherche une solution de la forme :
)tcos(A)t(x
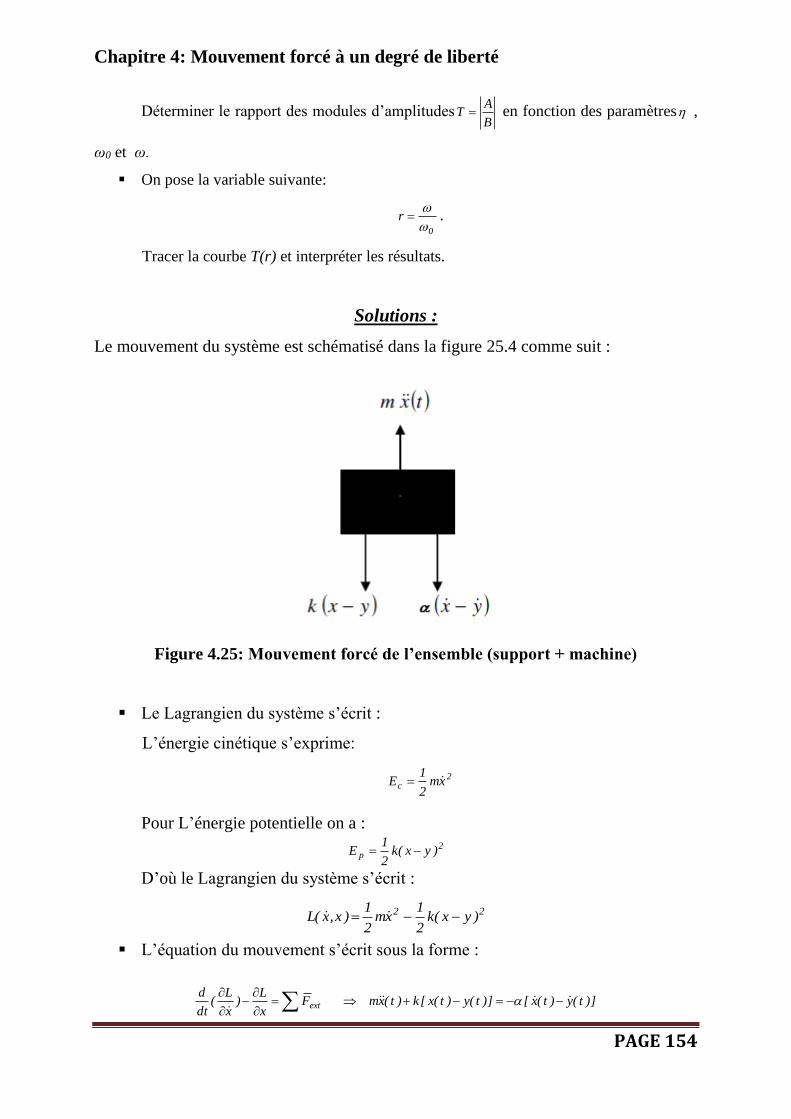
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 154
Déterminer le rapport des modules d’amplitudesB
AT en fonction des paramètres ,
ω0 et ω.
On pose la variable suivante:
0
r
.
Tracer la courbe T(r) et interpréter les résultats.
Solutions :
Le mouvement du système est schématisé dans la figure 25.4 comme suit :
Figure 4.25: Mouvement forcé de l’ensemble (support + machine)
Le Lagrangien du système s’écrit :
L’énergie cinétique s’exprime:
2c xm
2
1E
Pour L’énergie potentielle on a :
2p )yx(k
2
1E
D’où le Lagrangien du système s’écrit :
22 )yx(k
2
1xm
2
1)x,x(L
L’équation du mouvement s’écrit sous la forme :
)]t(y)t(x[)]t(y)t(x[k)t(xmFx
L)
x
L(
dt
dext

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 155
D’où :
)t(ky)t(y)t(kx)t(x)t(xm
C’est une équation différentielle non homogène.
La solution de l’équation différentielle:
En posant les constantes suivantes :
0
2
0 2
met
m
k
L’équation du mouvement se réécrit avec les nouvelles constantes :
)()(2)()(2)( 2
00
2
00 tytytxtxtxm
On considère que le support possède un déplacement sinusoïdal :
tjBeRetcosB)t(y
On chercher des solutions de la forme :
)t(jAeRe)tcos(A)t(x
L’équation du mouvement devient alors :
BjAej j )2()2( 2
00
2
00
2
Le rapport des modules des amplitudes s’écrit sous la forme:
2
1
2
0
22
0
2
2
0
2
0)2()(
)2(
B
AT
En posant la constante :
0
r
,
La courbe de la fonction T(r) est décrite comme suit:
2
1
222
2
)2()1(
1)2(
rr
r
B
AT
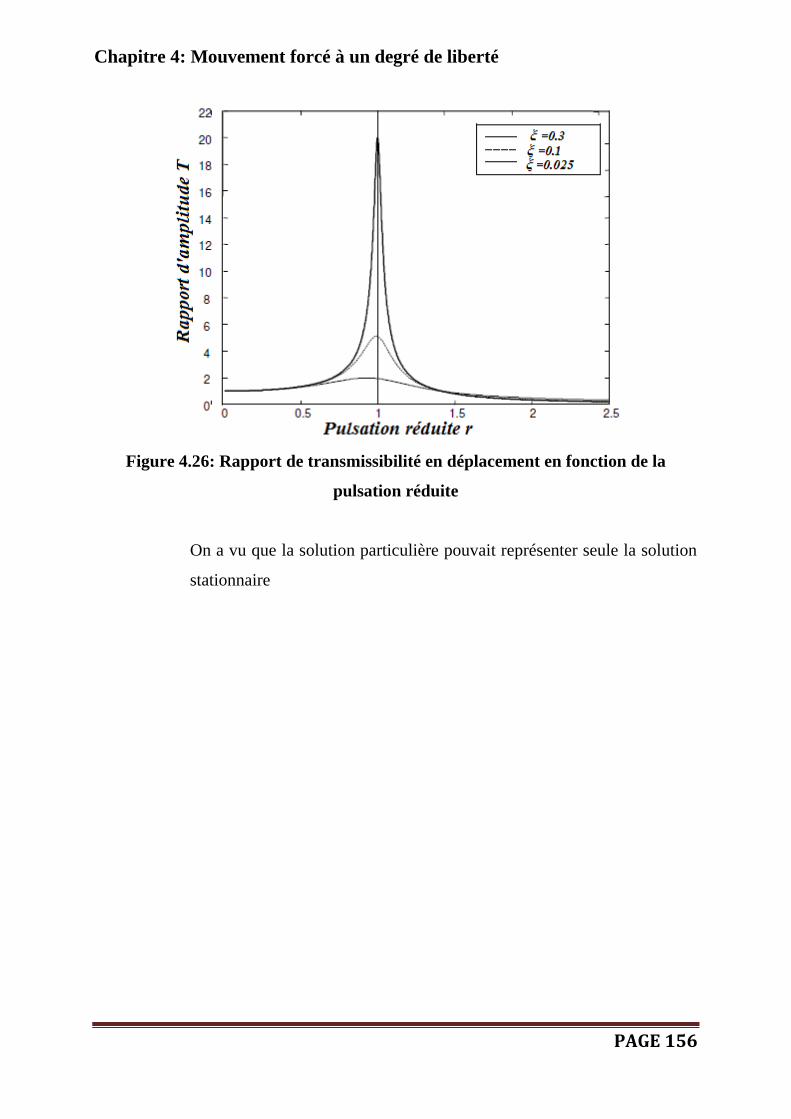
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 156
Figure 4.26: Rapport de transmissibilité en déplacement en fonction de la
pulsation réduite
On a vu que la solution particulière pouvait représenter seule la solution
stationnaire
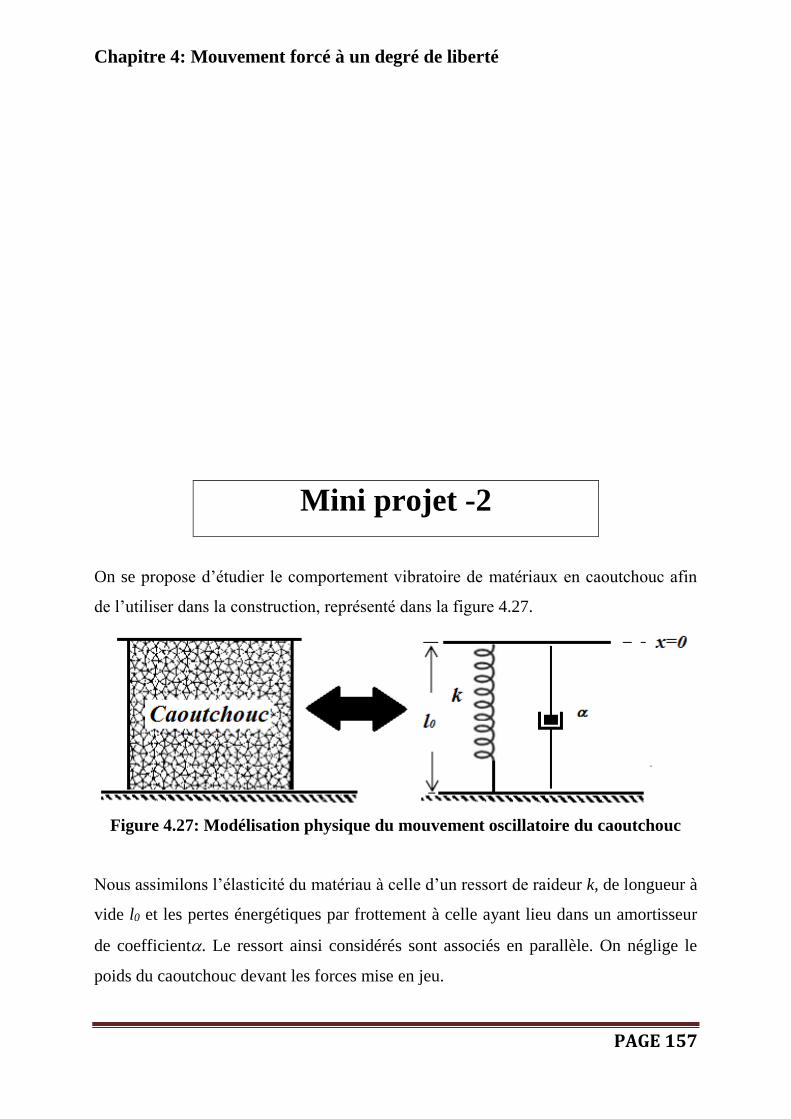
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 157
Mini projet -2
On se propose d’étudier le comportement vibratoire de matériaux en caoutchouc afin
de l’utiliser dans la construction, représenté dans la figure 4.27.
Figure 4.27: Modélisation physique du mouvement oscillatoire du caoutchouc
Nous assimilons l’élasticité du matériau à celle d’un ressort de raideur k, de longueur à
vide l0 et les pertes énergétiques par frottement à celle ayant lieu dans un amortisseur
de coefficient. Le ressort ainsi considérés sont associés en parallèle. On néglige le
poids du caoutchouc devant les forces mise en jeu.
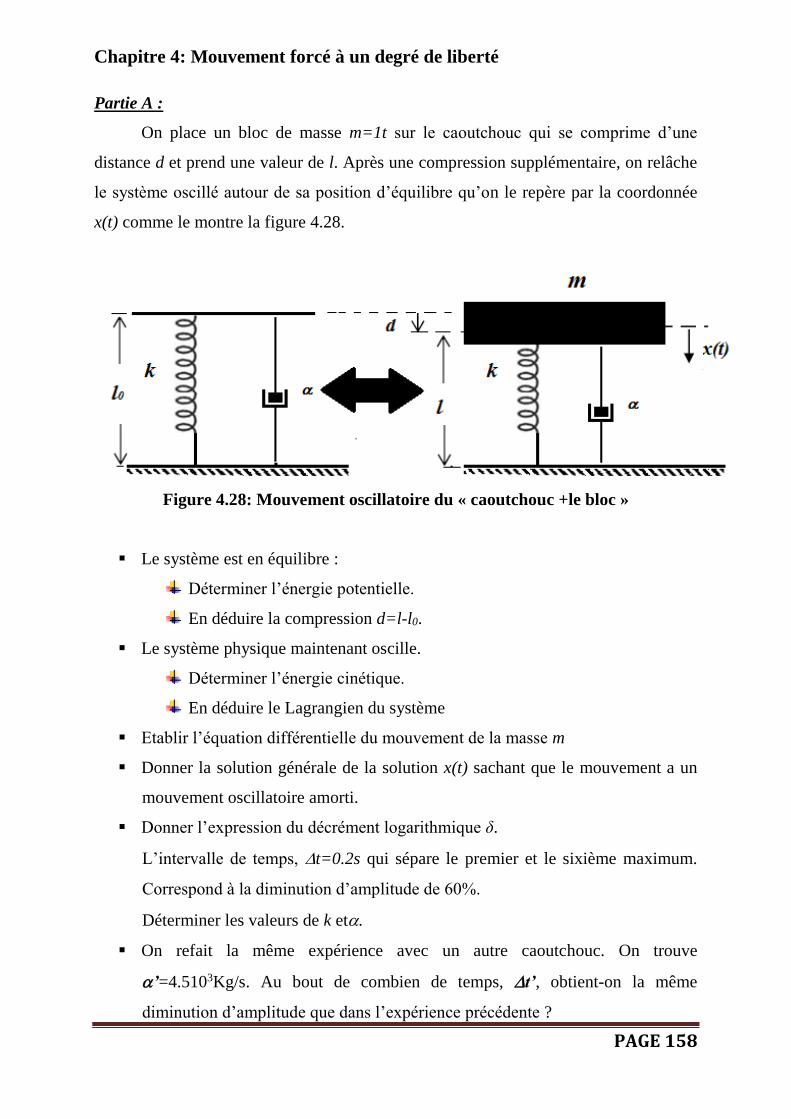
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 158
Partie A :
On place un bloc de masse m=1t sur le caoutchouc qui se comprime d’une
distance d et prend une valeur de l. Après une compression supplémentaire, on relâche
le système oscillé autour de sa position d’équilibre qu’on le repère par la coordonnée
x(t) comme le montre la figure 4.28.
Figure 4.28: Mouvement oscillatoire du « caoutchouc +le bloc »
Le système est en équilibre :
Déterminer l’énergie potentielle.
En déduire la compression d=l-l0.
Le système physique maintenant oscille.
Déterminer l’énergie cinétique.
En déduire le Lagrangien du système
Etablir l’équation différentielle du mouvement de la masse m
Donner la solution générale de la solution x(t) sachant que le mouvement a un
mouvement oscillatoire amorti.
Donner l’expression du décrément logarithmique δ.
L’intervalle de temps, t=0.2s qui sépare le premier et le sixième maximum.
Correspond à la diminution d’amplitude de 60%.
Déterminer les valeurs de k et.
On refait la même expérience avec un autre caoutchouc. On trouve
’=4.5103Kg/s. Au bout de combien de temps, t’, obtient-on la même
diminution d’amplitude que dans l’expérience précédente ?
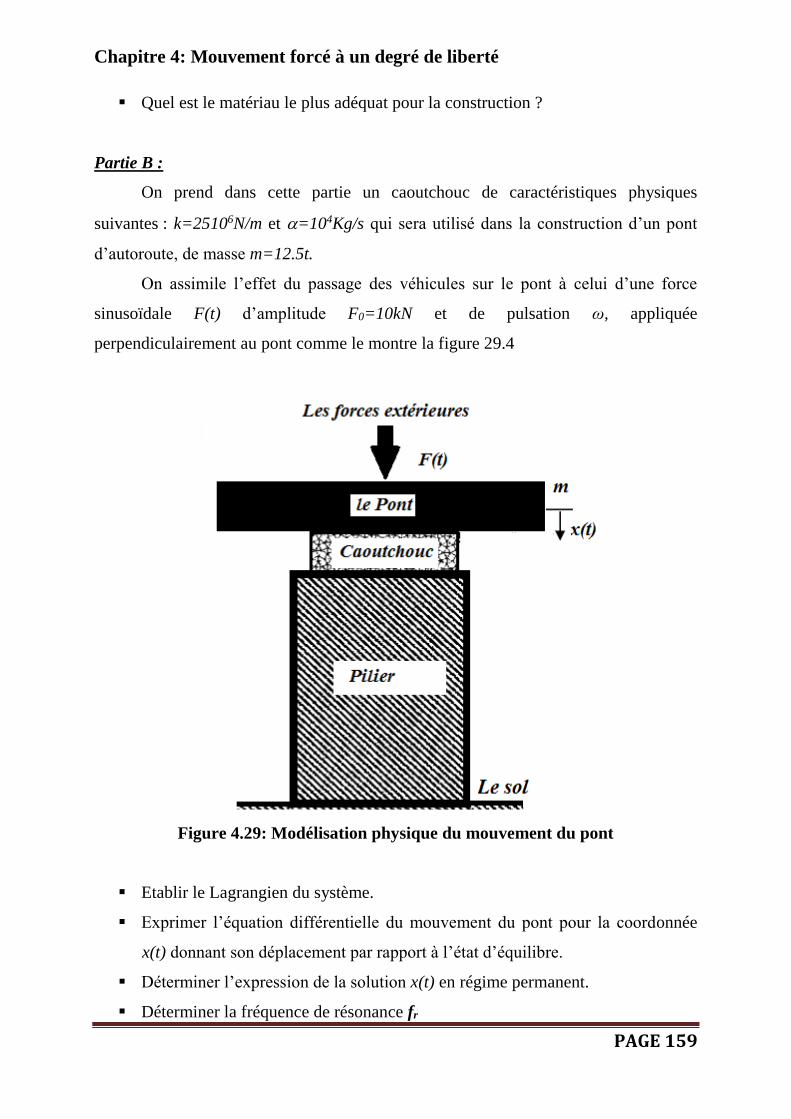
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 159
Quel est le matériau le plus adéquat pour la construction ?
Partie B :
On prend dans cette partie un caoutchouc de caractéristiques physiques
suivantes : k=25106N/m et =104Kg/s qui sera utilisé dans la construction d’un pont
d’autoroute, de masse m=12.5t.
On assimile l’effet du passage des véhicules sur le pont à celui d’une force
sinusoïdale F(t) d’amplitude F0=10kN et de pulsation ω, appliquée
perpendiculairement au pont comme le montre la figure 29.4
Figure 4.29: Modélisation physique du mouvement du pont
Etablir le Lagrangien du système.
Exprimer l’équation différentielle du mouvement du pont pour la coordonnée
x(t) donnant son déplacement par rapport à l’état d’équilibre.
Déterminer l’expression de la solution x(t) en régime permanent.
Déterminer la fréquence de résonance fr

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 160
Donner l’expression de l’amplitude maximale à laquelle le pont peut vibrer.
Quelle est la phase correspondante dans ce cas-là ?
Calculer l’énergie communiquée au pont pendant un intervalle de temps égale à
une période, lorsque le passage des véhicules le fait vibrer à la fréquence de
résonance.
Déterminer l’énergie dissipée par la force de frottement pend la même période.
Interpréter le résultat.
Solution:
Partie A
L’énergie potentielle s’écrit :
)()(2
1 2 xdmgxdkE p
En équilibre on a:
00
0
mgkdx
E
x
p
D’où la compression est égale à :
k
mgd
Le système est en mouvement ; L’énergie cinétique devient:
2
2
1xmEc
D’où le Lagrangien s’écrit alors
)()(2
1
2
1 22 xdmgxdkxmEEL pc
L’équation différentielle du mouvement est égale à :
xmgkdkxxmxx
L
x
L
dt
d
0
)(
D’où :
02 2
0 xxx
Avec les constantes :
m
ket
m 2
02

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 161
Puisque le mouvement est de nature oscillatoire amorti ; la solution est de la
forme :
)cos()( tAetx t
D’où la pulsation du mouvement est égale à :
22
0
Ainsi, le décrément logarithmique est calculé comme suit :
TTtx
tx
)(
)(ln
La décroissance après cinq périodes on a :
183.05
4.0ln5
4.0
1ln
)5(
)(ln
TTtx
tx
La période T’après intervalle de temps Δt est égale à :
sTsTt 04.02.05
Le coefficient d’amortissement α est déterminé à partir de δ :
131510.92
2
kgsT
mT
mT
La constante de raideur k est obtenue à partir de la pulsation ω :
222
0
22
0 m
k
D’où :
met
Tavec
mTm
k
2
2
4
42
22
2
Alors on a :
16
2
22
2
910.244
4 NmmT
mk
Le rapport d’amplitude qui correspond à la même diminution est donné
comme suit :
'
'''
)(
4.0ln
4.0
1lnln
'''
'
ttAe
Ae
tt
t
Avec :

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 162
m2
''
Alors le temps Δt’ est égale à :
sm
t 407.04.0ln2
'
''
Dans la deuxième expérience ; on obtient la même diminution d’amplitude
au bout d’un temps deux fois plus long. Le premier matériau amortit plus les
vibrations. Donc il est le mieux approprié pour la construction.
Partie B
Le Lagrangien s’écrit comme suit :
)()(2
1
2
1),( 22 xdmgxdkxmEExxL pc
L’équation différentielle du mouvement s’écrit comme suit :
)()()(
0
tFxmgkdkxxmtFxx
L
x
L
dt
d
D’où :
m
tFx
m
kx
mxtFkxxxm
)()(
C’est une équation différentielle linéaire nom homogène. Elle admet une
solution générale et une solution particulière.
La solution de l’équation différentielle :
En posant les constantes suivantes :
m
ket
m 2
02
L’équation différentielle devient alors :
m
tFxxx
)(2 2
0
En supposant que la forme de f(t) est sinusoïdale :
)cos()( 0 tFtF
En régime permanent la solution particulière est de la forme suivante :
)(
00 )cos()( ti
e eARtAtx

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 163
D’où
)(
0)( tjeAjtx
)(
0
2)( tjeAtx
Alors l’amplitude s’écrit sous la forme :
m
FjeA j 02
0
2
0 2
Le module s’écrit :
2222
0
2
00
4)(
/)(
mFA
Et l’argument sous la forme :
2
0
2
2
Artg
La fréquence de résonance est déterminée lorsque la réponse du système est
maximum ; d’où :
0)(0
d
Ad
Alors la fréquence de résonance s’exprime comme suit :
1
22
012.7
2
2
sf r
En remplaçant dans l’amplitude la pulsation de résonance, L’amplitude
maximale s’écrit alors:
)2(4)2(
/)(
22
0
222
0
22
0
0
max0
mFA r
D’où :
0
0
0
max0 23.22
)(
aveccmF
A r
La phase correspondante dans ce cas-là est exprimée comme suit :
2
2)(
2)(
2
2
2
0
2
0
2
mM
ArtgArtg r
r
rr
La puissance fournie est exprimée comme suit :
)sin(cos)()()()( 0000 ttAFtPtxtFtPf
Ainsi que l’énergie communiquée est égale :

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 164
T
ff
T
f dtttAFEdttPE0
0000
0
)sin(cos)(
D’où
JAFETAFE ff 6.7002
sin00000
Par contre la puissance dissipée se calcule comme suit :
)(sin)()()()()( 0
222
0
2 tAtPtxtxtFtP dfrd
Ainsi l’énergie dissipée est égale à :
T
dd
T
d dttAEdttPE0
0
222
0
0
)(sin)(
D’où :
6.3982
2
0
22
00 AEA
TE dd
On remarque que dd EE
On peut en conclure que l’énergie communiquée au pont pendant une
période se dissipe complétement dans l’amortisseur.
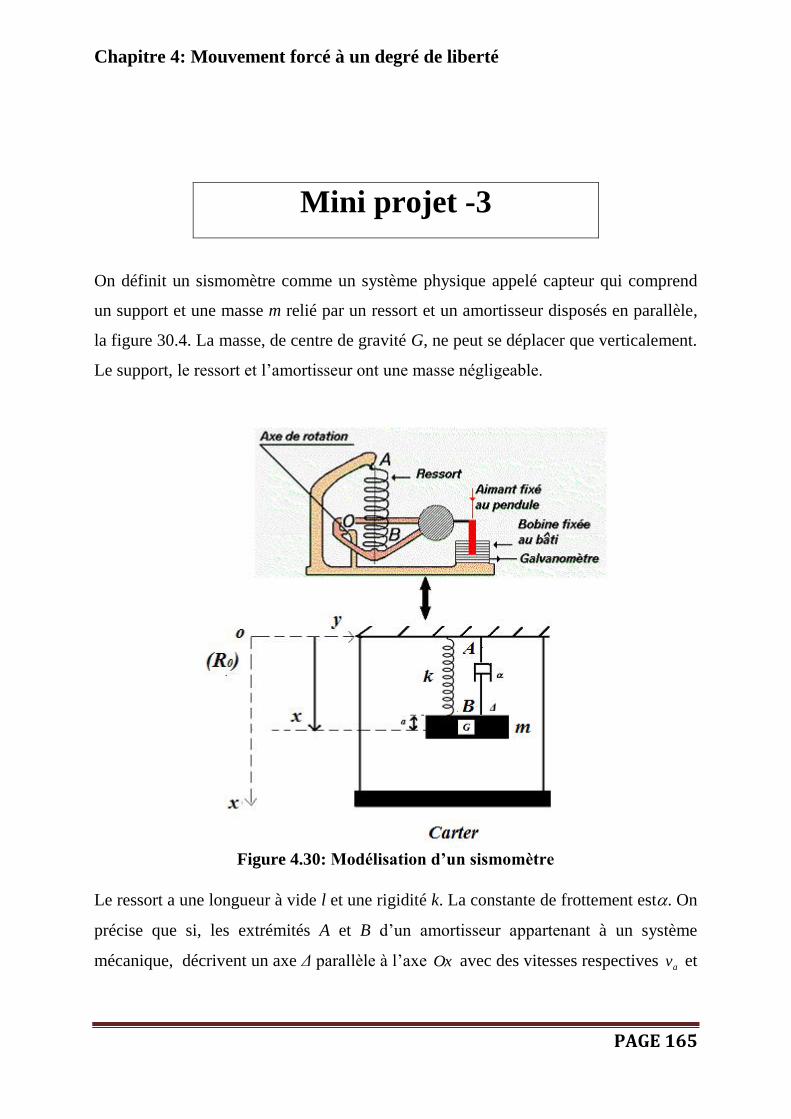
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 165
Mini projet -3
On définit un sismomètre comme un système physique appelé capteur qui comprend
un support et une masse m relié par un ressort et un amortisseur disposés en parallèle,
la figure 30.4. La masse, de centre de gravité G, ne peut se déplacer que verticalement.
Le support, le ressort et l’amortisseur ont une masse négligeable.
Figure 4.30: Modélisation d’un sismomètre
Le ressort a une longueur à vide l et une rigidité k. La constante de frottement est. On
précise que si, les extrémités A et B d’un amortisseur appartenant à un système
mécanique, décrivent un axe Δ parallèle à l’axe Ox avec des vitesses respectives av et

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 166
bv , l’amortisseur exercice sur le reste du système en point A une force i)vv( ab
et
en point B une force i)vv( aa
où i
est le vecteur unitaire.
Partie A :
Le support est immobile par rapport au repère (R0).
Calculer l’abscisse x0 du centre d’inertie de la masse en équilibre.
Ecrire l’équation différentielle du mouvement de la masse écarté de sa position
d’équilibre.
Que devient cette équation quand on pose x=x0+X.
On pose les constantes suivantes :
m
k2
0 , Cf avec km4f 2
c .
Montrer que l’équation différentielle s’écrit sous la forme suivante :
0xxx...
Calculer α* et β* en fonction de λ et ω0.
On donne λ= 0.5, ω0=10 rad/s. A l’instant initial, X=1 cm et 0X .
Déterminer X pour t= 0.2s.
Partie B :
On suppose maintenant que le support est solidaire du carter d’une machine animé
d’un mouvement sinusoïdale verticale tsinbx1 par rapport au repère (R0),
comme le montre la figure 4.31. On suppose que b est positif.
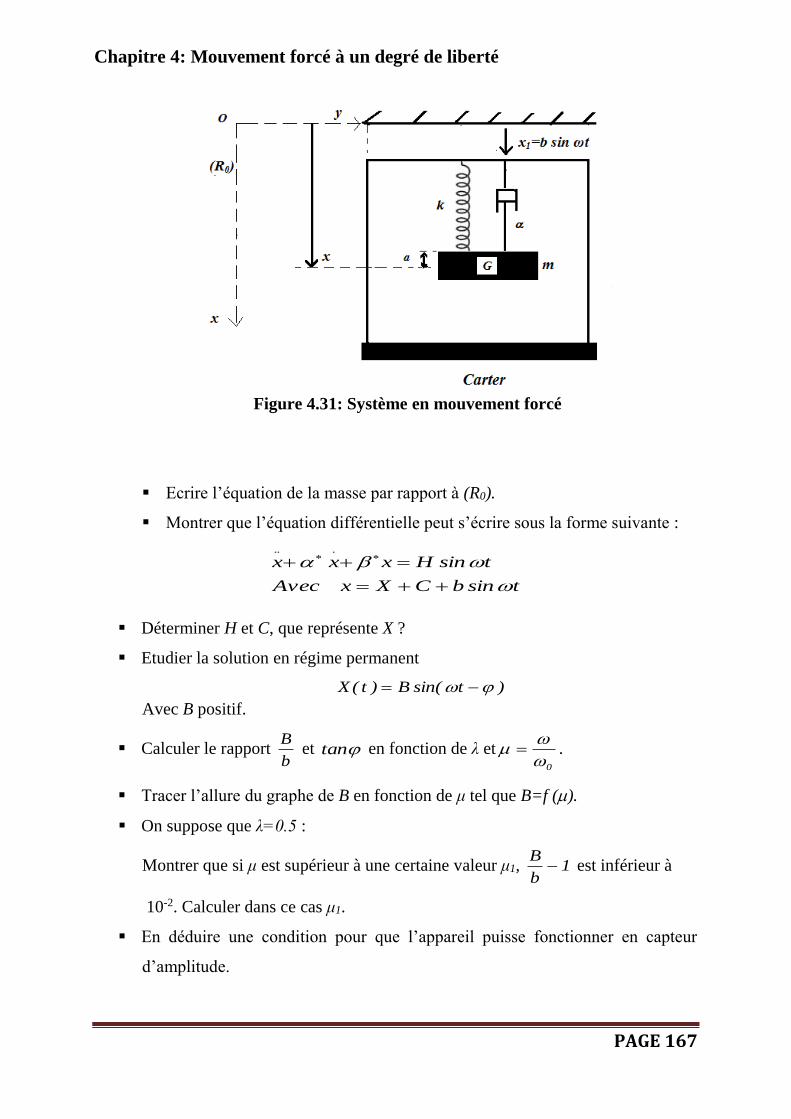
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 167
Figure 4.31: Système en mouvement forcé
Ecrire l’équation de la masse par rapport à (R0).
Montrer que l’équation différentielle peut s’écrire sous la forme suivante :
tsinbCXxAvec
tsinHxxx...
Déterminer H et C, que représente X ?
Etudier la solution en régime permanent
)tsin(B)t(X
Avec B positif.
Calculer le rapport b
B et tan en fonction de λ et
0
.
Tracer l’allure du graphe de B en fonction de μ tel que B=f ().
On suppose que λ=0.5 :
Montrer que si μ est supérieur à une certaine valeur μ1, 1b
B est inférieur à
10-2. Calculer dans ce cas μ1.
En déduire une condition pour que l’appareil puisse fonctionner en capteur
d’amplitude.

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 168
Solution:
Partie A : Le support est immobile par rapport au repère (R0).
A l’équilibre, l’abscisse x0 s’écrit comme suit :
)al(k
mgx0F 0
1i
i
L’équation différentielle du mouvement est de forme :
En appliquant la loi dynamique
xmg))al(x(kxm
D’ou
XxXxoù'd
Alors :
0kXXXm
La nouvelle équation du mouvement s’écrit alors :
200
200
2Avec
0XX2X
La résolution de cette équation différentielle :
22
0
22
0
2
00
2
15.0
)1(
0r2r
La solution est de la forme :
2
00
1
)sincos()( 0
XBXAAvec
tBtAetXt
Le système a un mouvement oscillatoire amorti.
La valeur de X est : X=0.15m
Partie B : Le support est mobile par rapport au repère (R0).
La relation dynamique du mouvement :

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 169
tsinbXxxetxXxoù'd
)xx(mg))al(xx(kxm
211
11
L’équation du mouvement devient alors :
bHAvec
tbXXX
2
22
00 sin2
La solution totale de l’équation différentielle en régime permanent est :
)tsin(B)t(X)t(X p
En notation complexe on aura la forme suivante :
)2
t(j
p Be)t(X~
)t(X~
En remplaçant dans l’équation différentielle, on obtient alors :
0
2222
2
Avec
1
2tan
)2()1(
bB
Les variations de B=f(μ) :
2
1si
21
10
0d
dB2
mm
Ainsi, on peut distinguer deux cas :
2
1 Amortissement faible Résonance
2
1 Amortissement important
On peut en déduire que :
bB
0B0
Pour =0.5, on aura :
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 170
05.7où'd101)1(
si101b
B
2pourb15.1BB
12
21
21
21
12
mmax
On peut conclure que l’appareil reproduit les oscillations du carter si la
pulsation ω est importante. Il fonctionne alors en capteur d’amplitude.
Mini projet -4
Un véhicule est modélisé par un bloc de centre de gravité G et de masse M = 1000 kg,
reposant sur une roue de rayon R par l‘intermédiaire de la suspension. Celle dernière
peut être représentée par un ressort de raideur k = 105 N/m et d'une longueur à vide l0,
et un amortisseur de coefficient d'amortissement α (voir figure 4.32)
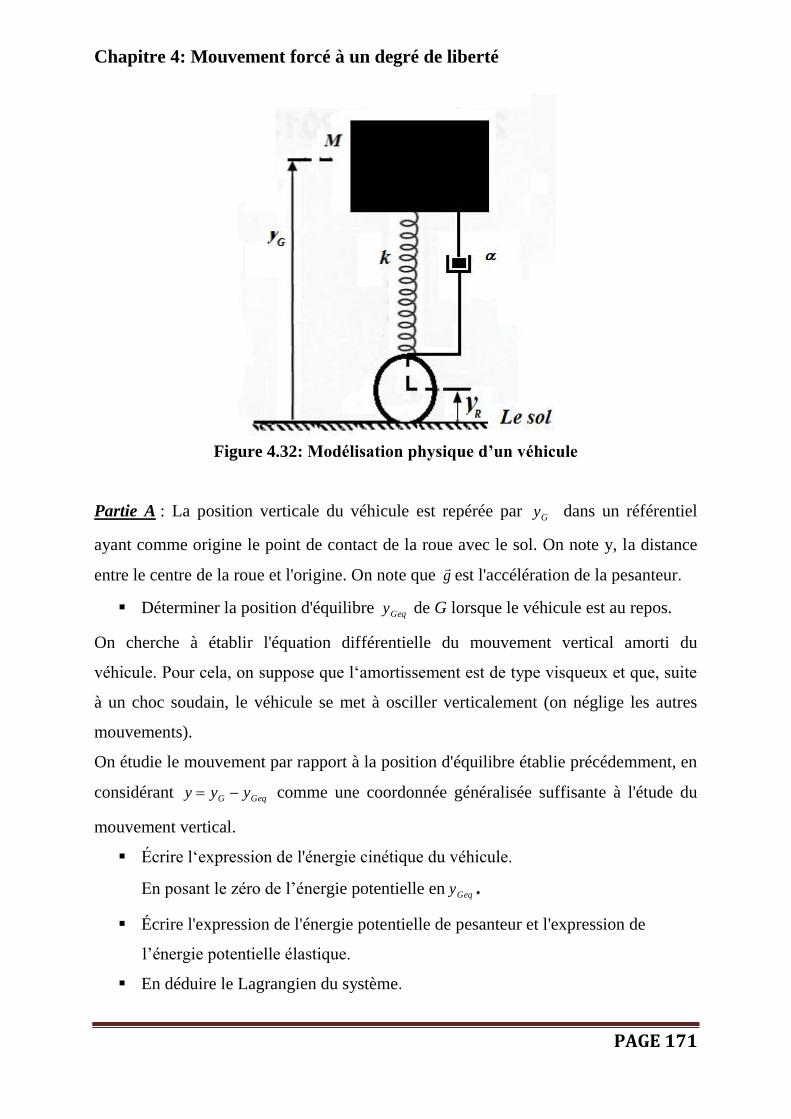
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 171
Figure 4.32: Modélisation physique d’un véhicule
Partie A : La position verticale du véhicule est repérée par Gy dans un référentiel
ayant comme origine le point de contact de la roue avec le sol. On note y, la distance
entre le centre de la roue et l'origine. On note que g
est l'accélération de la pesanteur.
Déterminer la position d'équilibre Geqy de G lorsque le véhicule est au repos.
On cherche à établir l'équation différentielle du mouvement vertical amorti du
véhicule. Pour cela, on suppose que l‘amortissement est de type visqueux et que, suite
à un choc soudain, le véhicule se met à osciller verticalement (on néglige les autres
mouvements).
On étudie le mouvement par rapport à la position d'équilibre établie précédemment, en
considérant GeqG yyy comme une coordonnée généralisée suffisante à l'étude du
mouvement vertical.
Écrire l‘expression de l'énergie cinétique du véhicule.
En posant le zéro de l’énergie potentielle en Geqy .
Écrire l'expression de l'énergie potentielle de pesanteur et l'expression de
l’énergie potentielle élastique.
En déduire le Lagrangien du système.
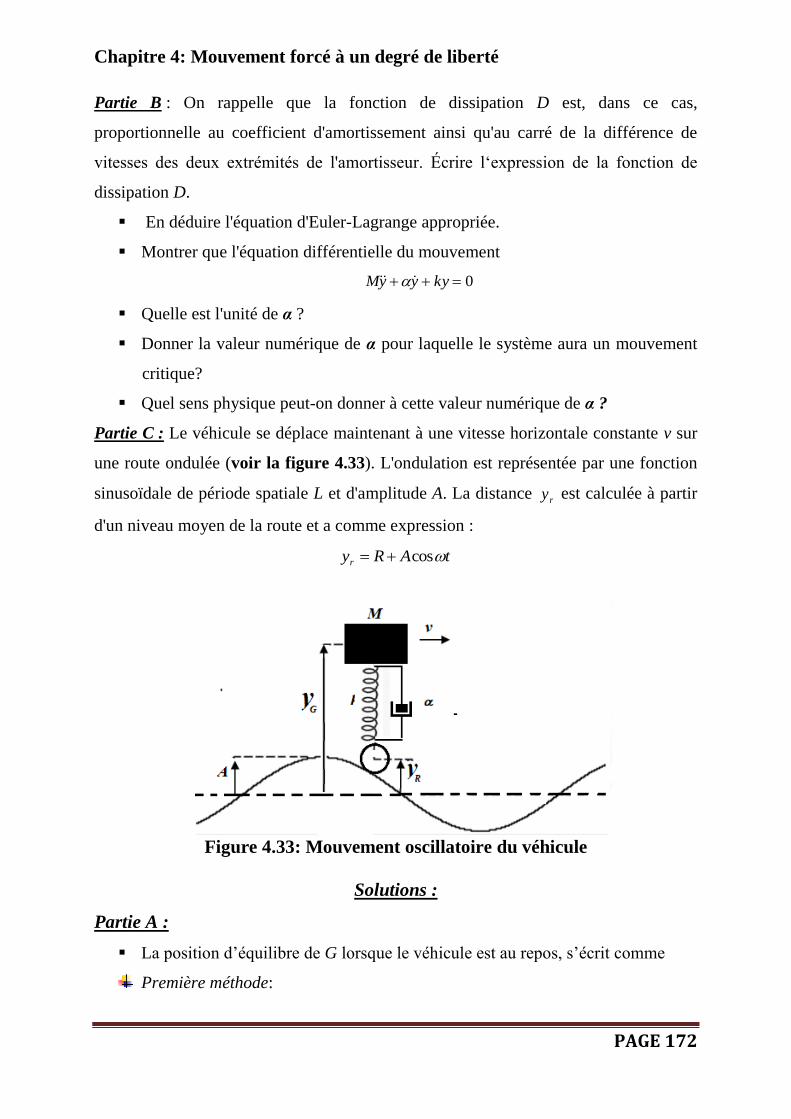
Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 172
Partie B : On rappelle que la fonction de dissipation D est, dans ce cas,
proportionnelle au coefficient d'amortissement ainsi qu'au carré de la différence de
vitesses des deux extrémités de l'amortisseur. Écrire l‘expression de la fonction de
dissipation D.
En déduire l'équation d'Euler-Lagrange appropriée.
Montrer que l'équation différentielle du mouvement
0 kyyyM
Quelle est l'unité de α ?
Donner la valeur numérique de α pour laquelle le système aura un mouvement
critique?
Quel sens physique peut-on donner à cette valeur numérique de α ?
Partie C : Le véhicule se déplace maintenant à une vitesse horizontale constante v sur
une route ondulée (voir la figure 4.33). L'ondulation est représentée par une fonction
sinusoïdale de période spatiale L et d'amplitude A. La distance ry est calculée à partir
d'un niveau moyen de la route et a comme expression :
tARyr cos
Figure 4.33: Mouvement oscillatoire du véhicule
Solutions :
Partie A :
La position d’équilibre de G lorsque le véhicule est au repos, s’écrit comme
Première méthode:

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 173
La masse est soumise à son poids dirigé vers le bas : MgP
La Force de rappel exercée par le ressort dirigé vers le haut :
)( 0llkF
Avec rGeq yyl est la longueur du ressort à l’équilibre.
A l’équilibre les deux forces se compensent:
MgyylkllkF rGeq )()( 00
Ce qui donne :
k
Mgyly rGeq 0
Deuxième méthode:
À l’équilibre statique, la dérivée de l’énergie potentielle par rapport à la
coordonnée généralisée est nulle. L’expression de l’énergie potentielle est
donnée par :
CsteMgylyykE rGp 2
0 )(2
1
Avec
GeqG yyy
D’où :
CsteMgylyyykE rGeqp 2
0 )(2
1
Avec la condition d’équilibre, on a :
0
0
y
p
y
E
Après dérivation et on remplace la valeur de y par zéro, on trouve ainsi:
0)( 0 Mglyyk rGeq
Ce qui donne aussi:
k
Mgyly rGeq 0
L’énergie cinétique s’écrit :

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 174
222
2
1)(
2
1
2
1yMyyMyME GeqGc
Car est une constante.
L’énergie potentielle de pesanteur est donnée comme suit:
MgyE p 1
Sachant que Geqy est choisie comme la référence de l’énergie potentielle.
L’énergie potentielle élastique se calcule comme suit :
2
0
2
02 )(2
1)(
2
1lyyyyklyykE rGeqGeqGrGp
Avec :
k
Mgyly rGeq 0 et GeqG yyy
Ce qui donne:
2
2 )(2
1
k
MgykE p
L’énergie potentielle totale s’écrit donc :
Mgyk
MgykEEE ppp 2
21 )(2
1
Le Lagrangien du système s’écrit :
22
2
1
2
1),( kyyMEEyyL pc
Le Lagrangien est donné à une constante près qui n’affecte pas le résultat final.
Partie B :
La fonction de dissipation D est donnée dans le cas d’une force de frottement de
type visqueuse sous la forme:
2
2
1yD
L’extrémité inferieure de l’amortisseur étant fixe.
L’équation d’Euler Lagrange est donnée dans le cas d’un système amorti par :
y
D
y
L
y
L
dt
d

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 175
Après dérivation on trouve l’équation différentielle du mouvement du système
s’écrit:
0 kyyyM
On peut noter que le terme y a la dimension d’une force, c'est-à-dire, qu’il a
l’unité2
.
s
mkg , ce qui donne l’unité de comme
s
kg..
La solution de l’équation différentielle est de la forme rte , d’où l’équation
caractéristique est obtenue comme suit :
02 M
kr
Mr
Pour que cette équation ait une solution double (caractéristique du mouvement
critique), il faudra que son discriminant soit nul, d’où:
)(4)( 2
M
k
M
Ce qui donne :
skgkM /10.22 4
Cette valeur numérique de représente le degré d’amortissement pour lequel
le système est sur le point de passer d’un mouvement oscillatoire vers un
mouvement apériodique (pas d’oscillation) et vice versa. rappelons que pour
cette valeur de , le système n’oscille pas encore mais revient plus rapidement
vers sa position d’équilibre.
Partie C :
Le véhicule se déplace à une vitesse constante. Le temps nécessaire pour que
ce dernier se déplace sur une longueur est: v
LT d’où la vitesse angulaire
est donnée par :
L
v
T
2
2
L’équation d’Euler-Lagrange de ce système amorti force:
)(tFy
D
y
L
y
L
dt
de

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 176
Où est la force généralisée, qui dans ce cas est donnée par :
)cos()( tkAtFe
Dans ce cas la fonction de dissipation D est donnée par :
2)(2
1ryyD
Avec
Le Lagrangien du système s’écrit toujours :,
22
2
1
2
1),( kyyMEEyyL pc
Après dérivation, on trouve:
)cos( tkAykyyyM r
Finalement l’équation différentielle du mouvement s’écrit alors :
)cos()sin( tkAtAkyyyM
En notation complexe l’équation différentielle s’écrit sous la forme suivante :
tjtj kAeAedt
dykyyM )(~~~
Après simplification on obtient :
tjtj AeM
kAej
Mty
M
ky
My
)(~~~
Il faut noter que )(~ ty n’est pas la solution de l’équation différentielle du
système étudié, mais plutôt sa partie réelle
On se propose de résoudre l’équation différentielle. On pose donc la solution
sinusoïdale sous la forme suivante :
jtj CeCAveceCty ~~
)(~
Où etC sont respectivement l’amplitude de la solution et le déphasage
entre la réponse et l’excitation, respectivement.
En remplaçant la solution dans l’équation différentielle ci-dessus, on trouve :

Chapitre 4: Mouvement forcé à un degré de liberté
PAGE 177
)(~
)( 2
M
kj
MAC
Mj
M
k
Ce qui nous donne l’amplitude en notation complexe comme suit:
Mj
M
kM
kj
MAC
2
~
Le module de l’amplitude serait :
222
22
)()(
)()(~
MM
k
M
k
MAC
Le déphasage entre la réponse et l’excitation:
)()(2
Mkarctg
karctg
La solution finale mesurable de l’équation différentielle du mouvement du
système est la partie réelle la solution complexe et s’écrit comme suit :
)cos(~
Re)(~ )( tCeCty tj
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 178
Chapitre 5 :
Mouvement oscillatoire
d’un système mécanqiue à plusieurs degrés
de liberté

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 179
5.1 Définitions
Les systèmes à plusieurs degrés de liberté sont des systèmes qui nécessitent
plusieurs coordonnées indépendantes. Le nombre de degré de liberté détermine le
nombre d’équations différentielles régissant l’évolution dans le temps de ces
coordonnées.
En fait, il existe deux types de systèmes :
5.1.1 Systèmes à plusieurs sous systèmes découplés :
La position de la masse m sur la figure 5.1 est repérée par deux coordonnées
cartésiennes indépendantes 1x et
2x , car se déplaçant, sans frottement, dans un plan.
Figure 5.1: Mouvement oscillatoire non couplé à deux degrés de liberté
Pour calculer le Lagrangien du système, on suppose qu’à l’équilibre les ressorts sont
lâches avec une longueur à vide 0l . L’énergie cinétique du système s’écrit sous la
forme :
2
2
2
12
1
2
1xmxmT (5.1)
L’énergie potentielle du système s’écrit sous la forme :
2
0
2
02
2
12
2
0
2
01
2
212
1
2
1
llxxkllxxkU
Pour de faibles oscillations, on peut avec une bonne approximation négliger les termes
en
2
0
1
l
x,
2
0
1
l
x tout en gardant les termes
0
1
l
xet
0
2
l
x . L’expression ci-dessus de
l’énergie potentielle devient

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 180
2
0
0
2
2
0
2
2
0
102
2
0
0
1
2
0
1
2
0
201 12
2
112
2
1
l
l
x
l
x
l
xlkl
l
x
l
x
l
xlkU
En utilisant un développement limité, les termes au carré dans l’expression di-dessus
s’écrivent sous la forme :
10
0
10
0
1
2
0
1
2
0
20 112 xl
l
xl
l
x
l
x
l
xl
et
20
0
10
0
2
2
0
2
2
0
10 112 xl
l
xl
l
x
l
x
l
xl
Ce qui permet de réécrire l’expression de l’énergie potentielle sous la forme suivante :
2
22
2
112
1
2
1xkxkU (5.2)
Le Lagrangien du système s’écrit alors :
2
22
2
11
2
2
2
12
1
2
1
2
1
2
1xkxkxmxmL (5.3)
En effet, ce Lagrangien peut s’écrire sous la forme d’une somme de deux Lagrangiens
indépendants (l’un en fonction de 1x set
1x et l’autre en fonction de 2x set
2x ) sans qu’il
y ait un terme qui les relie :
2
22
2
2
2
11
2
12221112
1
2
1
2
1
2
1,, xkxmxkxmxxLxxLL
C’est là un système composé de deux sous systèmes indépendants et découplés. Le
système différentiel s’exprime alors sous la forme:
0
0
0
0
222
111
22
11
xkxm
xkxm
x
L
x
L
dt
d
x
L
x
L
dt
d
(5.4)
On obtient un système différentiel découplé qui s’exprime comme:
0
0
2
2
022
1
2
011
xx
xx
1
12
02
1
12
01 ,m
k
m
kavec
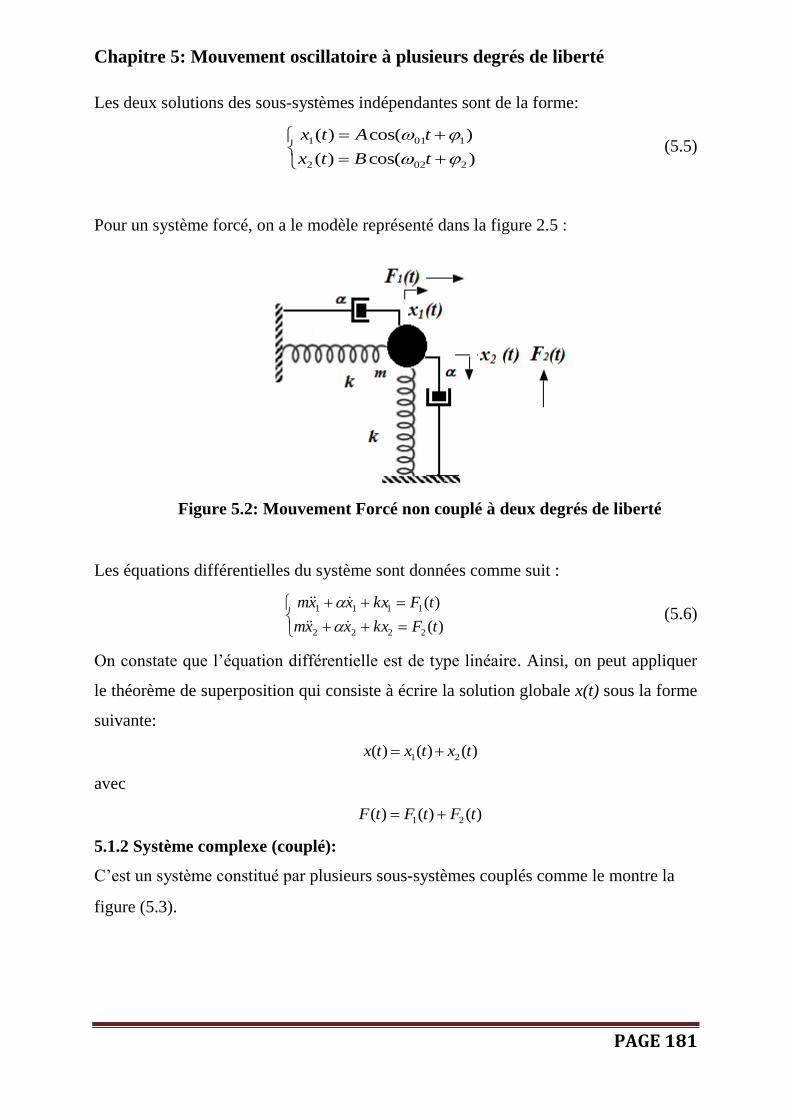
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 181
Les deux solutions des sous-systèmes indépendantes sont de la forme:
)cos()(
)cos()(
2022
1011
tBtx
tAtx (5.5)
Pour un système forcé, on a le modèle représenté dans la figure 2.5 :
Figure 5.2: Mouvement Forcé non couplé à deux degrés de liberté
Les équations différentielles du système sont données comme suit :
)(
)(
2222
1111
tFkxxxm
tFkxxxm
(5.6)
On constate que l’équation différentielle est de type linéaire. Ainsi, on peut appliquer
le théorème de superposition qui consiste à écrire la solution globale x(t) sous la forme
suivante:
)()()( 21 txtxtx
avec
)()()( 21 tFtFtF
5.1.2 Système complexe (couplé):
C’est un système constitué par plusieurs sous-systèmes couplés comme le montre la
figure (5.3).

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 182
Figure 5.3: Mouvement oscillatoire d’un système couplé
à deux degrés de liberté
Le Lagrangien du système en mouvement sans frottement s’écrit comme suit :
2
1
22
21
22
1
21212
1)(
2
1
2
1),,,(
i
iii
i
i xkxxkxmxxxxL (5.7)
Le système d’équations différentielles s’écrit :
0)(
0)(
0
0
12222
21111
22
11
kxxkkxm
kxxkkxm
x
L
x
L
dt
d
x
L
x
L
dt
d
(5.8)
Pour résoudre ce système d ‘équations différentielles linéaires, on peut se proposer des
solutions sinusoidales (en se basant sur notre expérience à résoudre des systèmes
linéaires à un degré de liberté), où les masses oscilleront à la même pulsation p avec
des amplitudes différentes et des phases différentes ; en l’occurence:
tj
tj
p
p
eAtx
eAtx
22
11~
)(
~)(
(5.9)
avec
2
1
22
11~
~
j
j
eAA
eAA (5.10)
En remplaçant les solutions proposées dans le système différentiel, on obtient le
système d’équations algébriques suivant :
0~~
)(
0~~
)(
122
2
2
211
2
1
AkAkkm
AkAkkm
p
p
(5.11)

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 183
qui peut s’écrire sous la forme matricielle suivante :
0
0~
~
2
1
1
2
1
1
2
1
A
A
kkmk
kkkm
p
p
(5.12)
Le système admet une solution non triviale si seulement si le déterminant de la matrice
22 est nul, d’où :
02
2
2
1
2
1
kkmk
kkkm
p
p
(5.13)
L’équation bicarrée (paramétrique) s’écrit donc :
0)1()( 22
2
2
1
22
2
2
1
4 Kpp (5.14)
avec :
1
12
1m
kk ,
2
22
2m
kk et
))(( 21
22
kkkk
kK
où le paramètre K est appelé le coefficient du couplage. Ce dernier peut prendre des
valeurs entre 0 et 1 selon la valeur de la constante de raideur du ressort de couplage k .
En effet, si 0k (le couplage entre les deux sous systèmes est lâche) K aura une
valeur nulle 0K . Alors que si k (le ressort de couplage se comporte comme une
barre rigide par rapport aux autres ressorts du système), on aura 1K .
En faisant un changement de variable 2
ppz , l’équation ci-dessus devient :
0)1()( 22
2
2
1
2
2
2
1
2 Kzz pp (5.15)
Le discriminant de cette équation s’écrit :
22
2
2
1
2
2
2
1
4
2
4
1
22
2
2
1
22
2
2
1 42)1(4)( KK
ou encore
04 22
2
2
1
22
2
2
1 K
Les deux pulsations propres sont donc :
2
2
2
1
222
2
2
1
2
2
2
12
2
2
2
2
1
222
2
2
1
2
2
2
12
1
4)(2
1
2
4)(2
1
2
K
K
p
p
(5.16)
Les deux pulsations propres du système sont positives ( pp 21 ) et leurs valeurs
dépendent de la valeur du coefficient de couplage K .
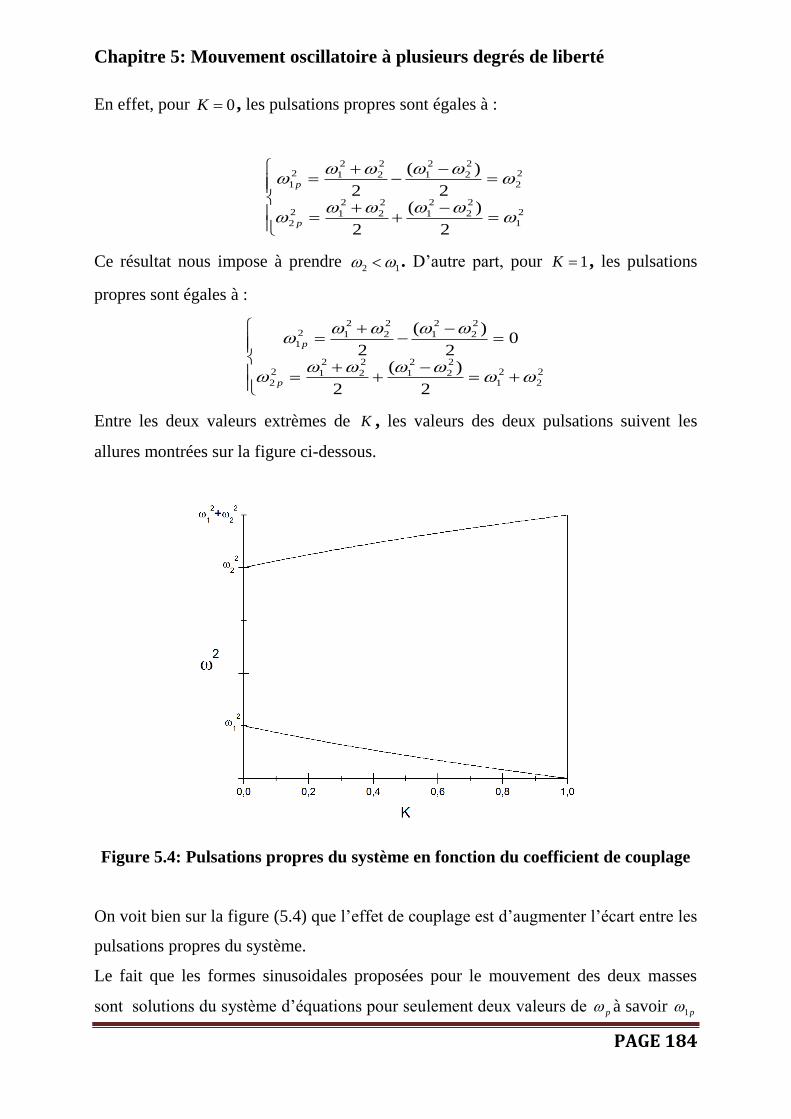
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 184
En effet, pour 0K , les pulsations propres sont égales à :
2
1
2
2
2
1
2
2
2
12
2
2
2
2
2
2
1
2
2
2
12
1
2
)(
2
2
)(
2
p
p
Ce résultat nous impose à prendre 12 . D’autre part, pour 1K , les pulsations
propres sont égales à :
2
2
2
1
2
2
2
1
2
2
2
12
2
2
2
2
1
2
2
2
12
1
2
)(
2
02
)(
2
p
p
Entre les deux valeurs extrèmes de K , les valeurs des deux pulsations suivent les
allures montrées sur la figure ci-dessous.
Figure 5.4: Pulsations propres du système en fonction du coefficient de couplage
On voit bien sur la figure (5.4) que l’effet de couplage est d’augmenter l’écart entre les
pulsations propres du système.
Le fait que les formes sinusoidales proposées pour le mouvement des deux masses
sont solutions du système d’équations pour seulement deux valeurs de p à savoir p1

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 185
et p2 nous amène à conclure que parmi toutes les formes possibles (pas forcément
simples) de mouvement de masses il existe seulement deux manières d’oscillation où
les masses oscillent de façon harmonique simple avec une seule et même pulsation : ce
sont là les deux modes de vibration des masses où celles-ci passent en même temps
par leurs positions d’équilibre.
Dans chaque mode d’oscillation de pulsation normale définie p1 ou p2 les masses
oscilleront en phase ou en opposition de phase selon la valeur des grandeurs 1
~A et 2
~A .
En effet, pour le mode 1, correspondant à la pulsation propre p1 , les amplitudes de
mouvement s’obtiennent en remplaçant p par p1 dans l’une des équations
algébriques ci-dessus. Ce qui donne :
2
1
1
2
1
2
1
~~)( A
m
kAp
ou encore
)(~
~
2
1
2
111
2
1
1
pm
k
A
A
(5.17)
On a rajouté un indice 1 aux amplitudes pour signifier que ces derniers correspondent
au premier mode. Le rapport des amplitudes s’écrit donc sous la forme :
0
4)(
2~
~
2
2
2
1
222
2
2
1
2
2
2
11
1
2
1
1
Km
k
A
A
Ce qui donne
12
11
1
2
1
1
1
2
1
1~
~
j
eA
A
A
A
où 1
1A et 1
2A sont les valeurs absolues des amplitudes de mouvement des deux masses.
Les phases 1
1 et 1
2 doivent être, dans ce cas, égales (ou différentes d’un angle 2 ).
Les masses oscillent en phase.
Pour le mode 2 , correspondant à la pulsation propre p2 , les amplitudes de
mouvement s’obtiennent en remplaçant p par p2 dans l’une des équations
algébriques ci-dessus. Ce qui donne :
2
1
1
2
1
2
2
~~)( A
m
kAp

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 186
ou encore
)(~
~
2
2
2
112
2
2
1
pm
k
A
A
(5.18)
On a rajouté un indice 2 aux amplitudes pour signifier que ces derniers correspondent
au premier mode. Le rapport des amplitudes s’écrit donc sous la forme :
0
4)(
2~
~
2
2
2
1
222
2
2
1
2
2
2
11
2
2
2
1
Km
k
A
A
Ce qui donne
22
21
2
2
2
1
2
2
2
1~
~
j
eA
A
A
A
où 2
1A et 2
2A sont les valeurs absolues des amplitudes de mouvement des deux masses.
Les phases 2
1 et 2
2 doivent être différentes d’un angle . Les masses oscillent dans
ce cas en opposition de phase.
Les solutions générales s’écrivent sous la forme d’une superposition des deux modes
propres, à savoir :
222
121
212
111
2
2
1
22
2
1
1
11
)(~
)(~
tjtj
tjtj
pp
pp
eAeAtx
eAeAtx (5.19)
Tenant compte des relations obtenues entre les amplitudes de mouvement des masses
pour chaque mode de vibration ainsi que celles qui existent entre les phases, il est
possible de réécrire les solutions sous la forme suivante :
212
111
212
111
)()()(~
)(~
2
2
2
112
1
2
1
2
111
12
2
1
1
11
tjptjp
tjtj
pp
pp
ek
mAe
k
mAtx
eAeAtx (5.20)
Les constantes 1
1A , 2
1A , 1
1 et 2
1 seront définies par les conditions initiales appliquées
sur le système.
Remarque: puisque que les mouvements des masses du système sont des quantités
mesurables donc réelles, il serait utile de prendre la partie réelle des solutions
complexes ci-dessus, à savoir :
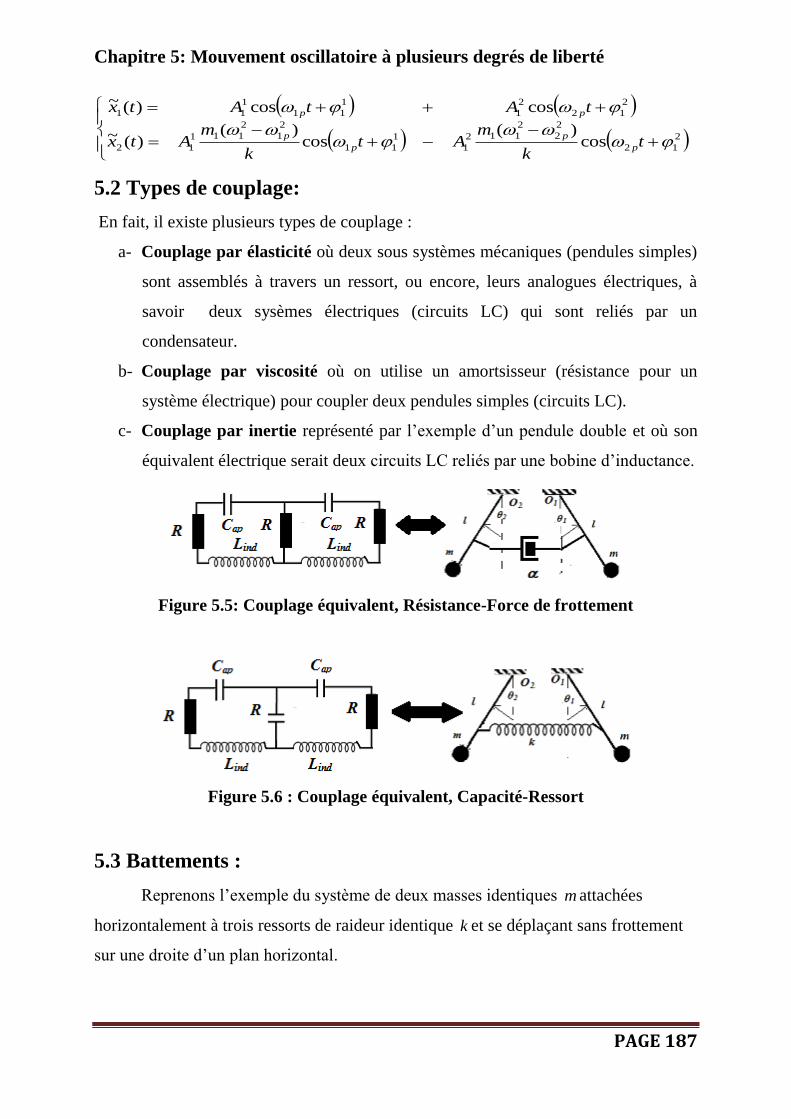
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 187
2
12
2
2
2
112
1
1
11
2
1
2
111
12
2
12
2
1
1
11
1
11
cos)(
cos)(
)(~
coscos)(~
tk
mAt
k
mAtx
tAtAtx
p
p
p
p
pp
5.2 Types de couplage:
En fait, il existe plusieurs types de couplage :
a- Couplage par élasticité où deux sous systèmes mécaniques (pendules simples)
sont assemblés à travers un ressort, ou encore, leurs analogues électriques, à
savoir deux sysèmes électriques (circuits LC) qui sont reliés par un
condensateur.
b- Couplage par viscosité où on utilise un amortsisseur (résistance pour un
système électrique) pour coupler deux pendules simples (circuits LC).
c- Couplage par inertie représenté par l’exemple d’un pendule double et où son
équivalent électrique serait deux circuits LC reliés par une bobine d’inductance.
Figure 5.5: Couplage équivalent, Résistance-Force de frottement
Figure 5.6 : Couplage équivalent, Capacité-Ressort
5.3 Battements :
Reprenons l’exemple du système de deux masses identiques m attachées
horizontalement à trois ressorts de raideur identique k et se déplaçant sans frottement
sur une droite d’un plan horizontal.
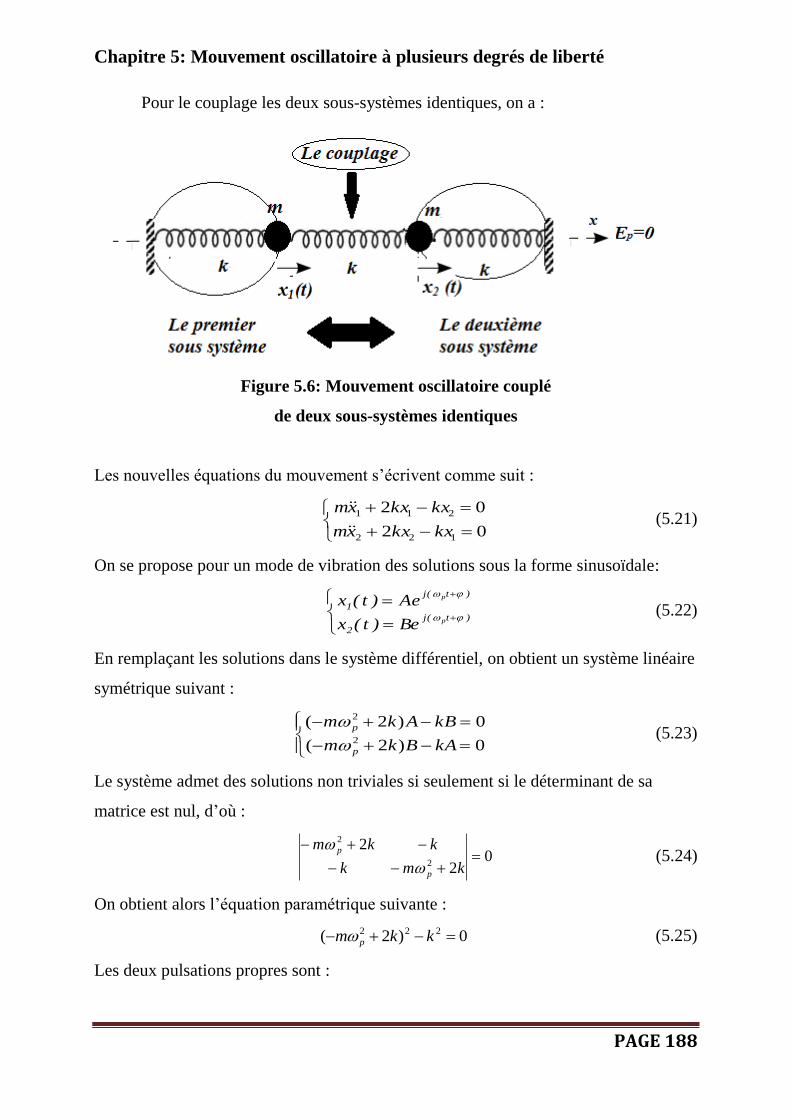
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 188
Pour le couplage les deux sous-systèmes identiques, on a :
Figure 5.6: Mouvement oscillatoire couplé
de deux sous-systèmes identiques
Les nouvelles équations du mouvement s’écrivent comme suit :
02
02
122
211
kxkxxm
kxkxxm
(5.21)
On se propose pour un mode de vibration des solutions sous la forme sinusoïdale:
)t(j
2
)t(j
1
p
p
Be)t(x
Ae)t(x
(5.22)
En remplaçant les solutions dans le système différentiel, on obtient un système linéaire
symétrique suivant :
0)2(
0)2(2
2
kABkm
kBAkm
p
p
(5.23)
Le système admet des solutions non triviales si seulement si le déterminant de sa
matrice est nul, d’où :
02
22
2
kmk
kkm
p
p
(5.24)
On obtient alors l’équation paramétrique suivante :
0)2( 222 kkm p (5.25)
Les deux pulsations propres sont :

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 189
m
km
k
p
p
32
2
2
1
(5.26)
Les solutions générales sont la superposition des deux modes propres et sont de de la
forme suivante :
)cos()cos()(
)cos()cos()(
2221112
2221111
tBtBtx
tAtAtx
pp
pp (5.27)
Pour le premier mode correspondant à la pulsation propre p1 , on a :
m
kpp 1
et en remplaçant dans l’une des équations du système algébrique ci-dessus on trouve
ABAkBAkm p 1111
2
1 0)2(
Figure 5.8: Etat du système pour le premier mode.
« En phase »
Dans ce mode les deux masses oscillent à la même pulsation m
kp 1 avec la même
amplitude A , en phase.
Pour le deuxième mode correspondant à la pulsation propre p2 , on a :
m
kpp 32

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 190
et en remplaçant dans l’une des équations du système algébrique ci-dessus on trouve
BBAkBAkm p 2222
2
2 0)2(
Figure 5.9 : Etat du système pour le deuxième mode.
« En opposition de phase »
Dans ce mode les deux masses oscillent à la même pulsation m
kp
32 avec la même
amplitude B , en opposition de phase.
Les solutions générales deviennent alors:
)cos()cos()(
)cos()cos()(
22112
22111
tBtAtx
tBtAtx
pp
pp (5.29)
Où les constantes A , B ,1 et
2 seront définies par les conditions initiales.
Pour le besoin de notre étude du phénomène dit de battement il s’avère utile
d’appliquer les conditions initiales suivantes :
0)(0)(
0)()(
22
101
txtx
txXtx
(5.30)
Cela signifie qu’à 0t on écarte une masse de sa position d’équilibre d’une distance
0X tout en gardant l’autre masse à sa position d’équilibre ensuite on les lâche sans
vitesse initiales. Après remplacement dans les solutions générales, on obtient les
quatre équations suivantes:

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 191
40sinsin
30sinsin
20coscos
1coscos
2211
2211
21
021
pp
pp
BA
BA
BA
XBA
L’addition des équations 1 et 2 d’une part et les équations 3 et 4 donne :
60sin
52
cos
1
01
A
XA
en sommant les carrés des équations 5 et 6 on obtient :
2
0XA , et de 6 on déduit que 01 .
De même, la soustraction des équations 1 et 2 d’une part et les équations 3 et 4
donne :
80sin
72
cos
2
02
B
XB
en sommant les carrés des équations 7 et 8 on obtient :
2
0XB , et de 8 on déduit que 02 .
On en arrive donc aux équations horaires du mouvement qui s’écrivent comme suit:
ttX
tx
ttX
tx
pp
pp
210
2
210
1
coscos2
)(
coscos2
)(
(5.31)
Ce résultat est très important car il nous renseigne sur le fait que le mouvement des
deux masses, soumises aux conditions initiales précédentes, est la superspoition de
deux mouvements sinusoïdaux simples de pulsations différentes. C’est un mouvement
complexe où les deux modes propres d’oscillation contribuent équitablement au
mouvement du système. Dans ce cas, on dit que les deux modes propres d’oscillation
du système sont excités. Cependant, la forme mathématique donnée des solutions n’est
pas si intuitive au point de nous permettre de concevoir, grosso modo, la manière avec
laquelle les masses vont osciller. Pour ce faire, il est utile de réarranger les formes
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 192
mathématiques des solutions, en ayant recours à des relations trigonométriques bien
connues, à savoir :
2cos
2cos2coscos
bababa
et
2sin
2sin2coscos
bababa
ce qui permet de réécrire les solutions ci-dessus sous la forme :
ttXtx
ttXtx
pppp
pppp
2sin
2sin)(
2cos
2cos)(
2121
02
2121
01
Un changement de notation nous permet d’écrire :
2
12
mod
pp
dite pulsation de modulation et
2
21 pp
moy
dite pulsation moyenne.
De nouveau, les solutions s’expriment sous la forme condensée suivante:
ttXtx moy cos.cos)( mod01 (5.32)
et
ttXtx moy sin.sin)( mod02 (5.33)
Ces deux formes de solutions sont plus intuitives à expliquer, car il est possible de voir
le mouvement des masses comme un mouvement ‘ sinusoïdal simple’ de pulsation
moy mais avec une ampliude tX mod0 cos (pour la première masse) qui change
sinusoïdalement dans le temps à une pulsation mod . On dit que l’amplitude du
mouvement est modulée.
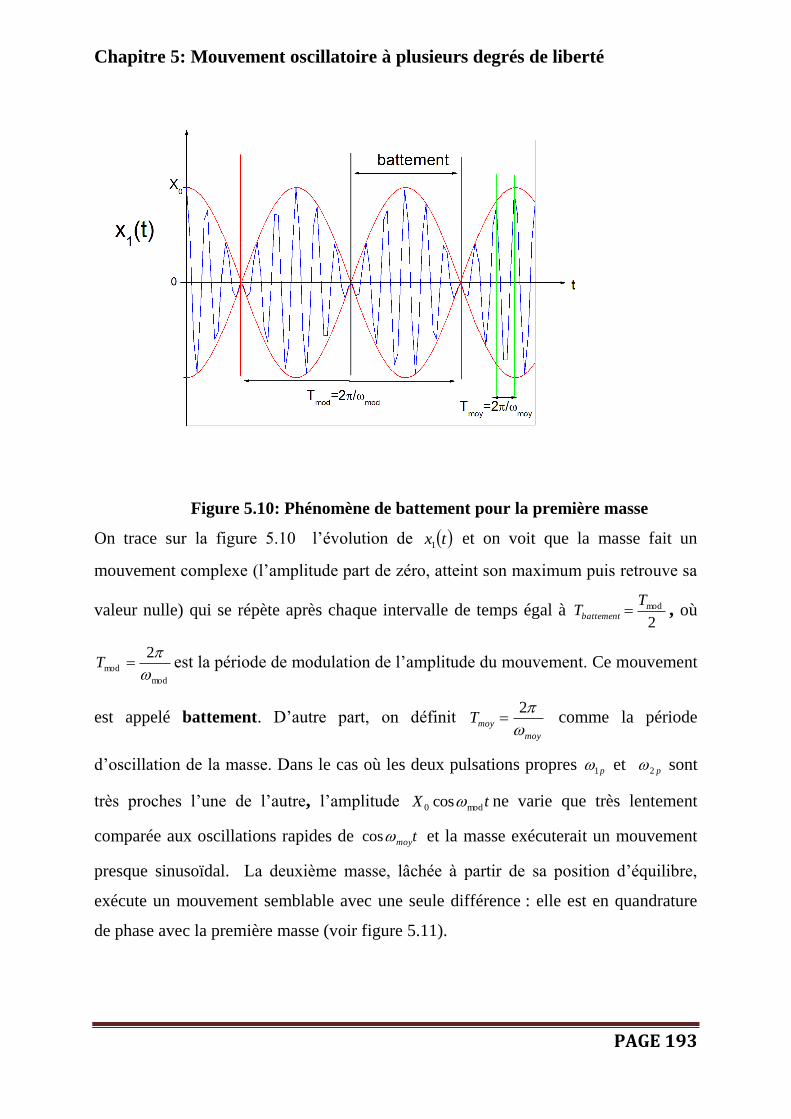
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 193
Figure 5.10: Phénomène de battement pour la première masse
On trace sur la figure 5.10 l’évolution de tx1 et on voit que la masse fait un
mouvement complexe (l’amplitude part de zéro, atteint son maximum puis retrouve sa
valeur nulle) qui se répète après chaque intervalle de temps égal à 2
modTTbattement , où
mod
mod
2
T est la période de modulation de l’amplitude du mouvement. Ce mouvement
est appelé battement. D’autre part, on définit moy
moyT
2 comme la période
d’oscillation de la masse. Dans le cas où les deux pulsations propres p1 et p2 sont
très proches l’une de l’autre, l’amplitude tX mod0 cos ne varie que très lentement
comparée aux oscillations rapides de tmoycos et la masse exécuterait un mouvement
presque sinusoïdal. La deuxième masse, lâchée à partir de sa position d’équilibre,
exécute un mouvement semblable avec une seule différence : elle est en quandrature
de phase avec la première masse (voir figure 5.11).

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 194
Figure 5.11: Phénomène de battement pour la deuxième masse
Au moment où l’une des deux masses s’immobilise, l’autre masse est à son
maximum ; toute l’énergie du système étant transférée vers cette denière.
Une période de battement est donc le temps que fait l’énergie de vibration dans son
aller-retour complet entre les deux masses.
5.4 Oscillations forcées d’un système non amorti à deux degrés de
liberté :
Reconsidérons le système mécanique symétrique ci-dessus, et on applique une force
extérieure de forme sinusoïdale au premier sous système qui s’exprime comme suit :
tj
e eFRtFtF 00 cos)( (5.34)
Les équations d’Euler-Lagrange qui correspondent à cette situation physique
s’écrivent comme suit :
0
cos
22
0
11
x
L
x
L
dt
d
tFx
L
x
L
dt
d
(5.35)

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 195
La seconde équation ne contient pas de terme de force extérieure car cette dernière
s’applique directement sur la deuxième masse. Après dérivation on obtient :
02
cos2
122
00211
kxkxxm
eFRtFkxkxxm tj
e
(5.36)
Pour résoudre le système d’équations différentielles ci-dessus on suppose que le même
système mécanique est maintenant soumis à une force complexe tjeFtF 0 . Après
résolution, on revient à notre cas physique en prenant la partie réelle de la solution
obtenue. En effet, on a
0~~2~
~~2~
122
0211
xkxkxm
eFxkxkxm tj
(5.37)
Dans le régime permanent, les solutions ont la même forme que le second membre, à
savoir:
)(
22
)(
11~
)(~)(~
~)(~)(~
tj
p
tj
p
eBtxtx
eAtxtx (5.38)
avec AjAeA
~ et Bj
BeB
~
.
En remplaçant les solutions proposées dans le système différentiel, on obtient le
système d’équations algébriques suivant :
0~~
)2(
~~)2(
2
0
2
AkBkm
FBkAkm
(5.39)
avec deux inconnues A~
et B~
dont les expressions sont données par ce qui suit :
m
k
m
k
m
k
m
F
m
k
m
F
kmk
kkm
km
kF
App
3
2
))((
2
2
2
20~
22
20
2
2
22
1
2
20
2
2
2
0
(5.40)
et
m
k
m
km
kF
m
kF
kmk
kkm
k
Fkm
Bpp
3))((
2
2
0
2
~
22
2
0
2
2
22
1
2
2
0
2
2
0
2
(5.41)

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 196
Tout d’abord, il est utile de remarquer que les inconnues A~
et B~
ont des valeurs réelles
négatives ou positives selon la valeur de la pulsation de la force extérieure . Cela
signifie que les valeurs des phases des masses par rapport à la force excitatrice sont
soit nulles 0A , 0B soit A, B
. En effet, si A~
et B~
sont positives, il
serait possible de les écrire sous la forme
0~ jjAeAeA A
et
0~ jjBeBeB B
où A et B sont les modules des nombres complexes A~
et B~
. Dans ce cas, les masses
oscilleront en phase avec la force extérieure. Dautre part, si A~
et B~
sont négatives, il
serait possible de les écrire sous la forme
jjAeAeA A
~
et
jjBeBeB B
~
Dans ce cas les masses oscilleront en opposition de phase avec la force extérieure. Ce
sont là les deux seules possibilités d’état de phase des masses par rapport à la force
extérieure. Si le système était soumis à des forces d’amortissment, les valeurs des
phases prendront des valeurs entre 0 et . On doit noter ici que l’état de phase d’une
masse par rapport à la force extérieure est indépendante de l’état de phase de l’autre
masse par rapport à cette même force, c’est à dire qu’on peut tomber sur un cas où une
masse oscille en phase alors que l’autre est en opposition de phase avec la force
extérieure.
Pour une valeur 0 , les amplitudes de mouvement des masses sont égales à
k
F
m
k
m
k
m
k
m
F
A3
2
3
2
~ 0
0
(5.42)
et
k
F
m
k
m
km
kF
B33
~ 02
0
(5.43)
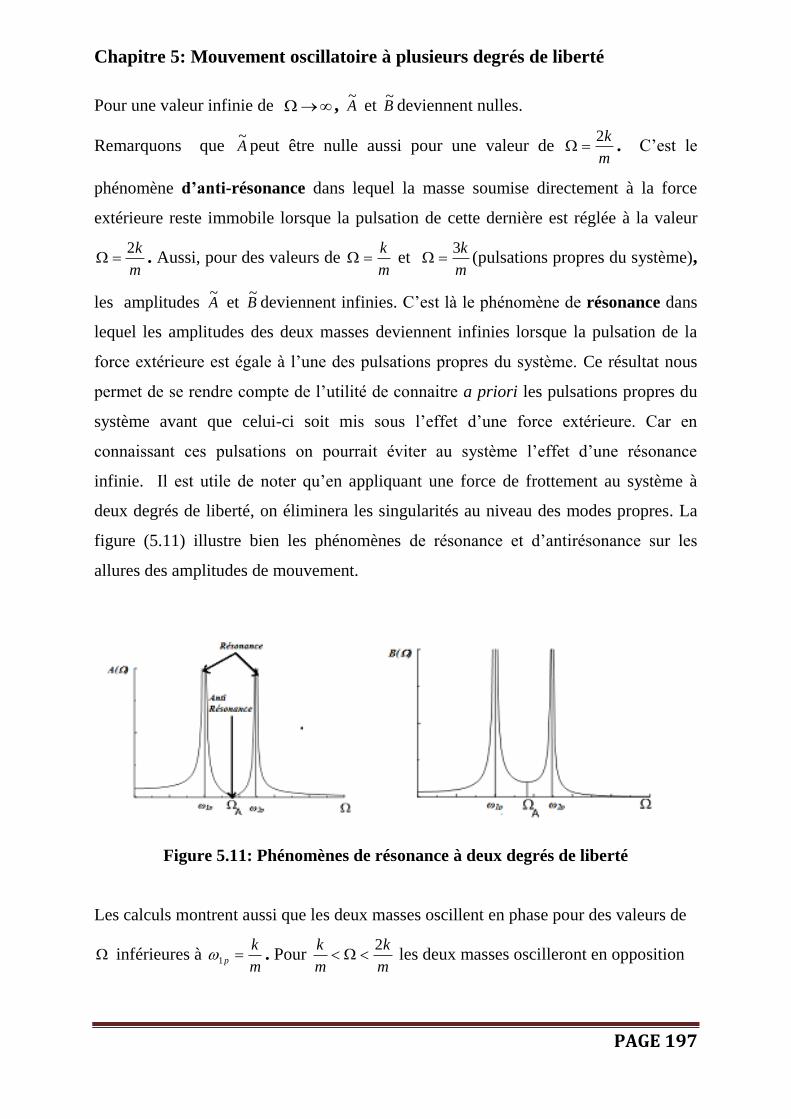
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 197
Pour une valeur infinie de , A~
et B~
deviennent nulles.
Remarquons que A~
peut être nulle aussi pour une valeur de m
k2 . C’est le
phénomène d’anti-résonance dans lequel la masse soumise directement à la force
extérieure reste immobile lorsque la pulsation de cette dernière est réglée à la valeur
m
k2 . Aussi, pour des valeurs de
m
k et
m
k3 (pulsations propres du système),
les amplitudes A~
et B~
deviennent infinies. C’est là le phénomène de résonance dans
lequel les amplitudes des deux masses deviennent infinies lorsque la pulsation de la
force extérieure est égale à l’une des pulsations propres du système. Ce résultat nous
permet de se rendre compte de l’utilité de connaitre a priori les pulsations propres du
système avant que celui-ci soit mis sous l’effet d’une force extérieure. Car en
connaissant ces pulsations on pourrait éviter au système l’effet d’une résonance
infinie. Il est utile de noter qu’en appliquant une force de frottement au système à
deux degrés de liberté, on éliminera les singularités au niveau des modes propres. La
figure (5.11) illustre bien les phénomènes de résonance et d’antirésonance sur les
allures des amplitudes de mouvement.
Figure 5.11: Phénomènes de résonance à deux degrés de liberté
Les calculs montrent aussi que les deux masses oscillent en phase pour des valeurs de
inférieures à m
kp 1 . Pour
m
k
m
k 2 les deux masses oscilleront en opposition
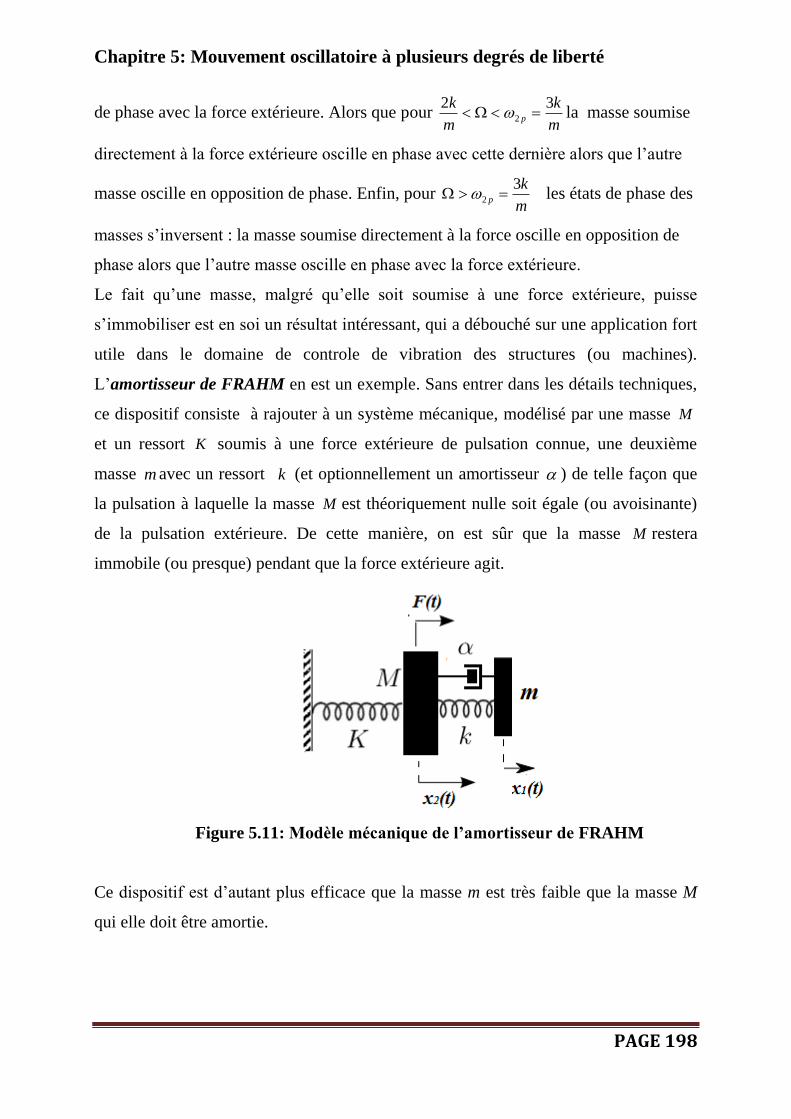
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 198
de phase avec la force extérieure. Alors que pour m
k
m
kp
322 la masse soumise
directement à la force extérieure oscille en phase avec cette dernière alors que l’autre
masse oscille en opposition de phase. Enfin, pour m
kp
32 les états de phase des
masses s’inversent : la masse soumise directement à la force oscille en opposition de
phase alors que l’autre masse oscille en phase avec la force extérieure.
Le fait qu’une masse, malgré qu’elle soit soumise à une force extérieure, puisse
s’immobiliser est en soi un résultat intéressant, qui a débouché sur une application fort
utile dans le domaine de controle de vibration des structures (ou machines).
L’amortisseur de FRAHM en est un exemple. Sans entrer dans les détails techniques,
ce dispositif consiste à rajouter à un système mécanique, modélisé par une masse M
et un ressort K soumis à une force extérieure de pulsation connue, une deuxième
masse m avec un ressort k (et optionnellement un amortisseur ) de telle façon que
la pulsation à laquelle la masse M est théoriquement nulle soit égale (ou avoisinante)
de la pulsation extérieure. De cette manière, on est sûr que la masse M restera
immobile (ou presque) pendant que la force extérieure agit.
Figure 5.11: Modèle mécanique de l’amortisseur de FRAHM
Ce dispositif est d’autant plus efficace que la masse m est très faible que la masse M
qui elle doit être amortie.

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 199
Figure 5.12: Application technique de l’amortisseur de FRAHM.
On peut citer d’autres exemples d’applications : l’oscillation des véhicules
5.5 Analogies électriques
L’analogue électrique du système mécanique libre , étudié ci-dessus, et composé de
deux masses 1m et 2m , en mouvement sans frottement ni force extérieure sur un plan
horizontal, attachées à deux ressorts 1k et 2k , et couplées l’une à l’autre par un ressort
k est un système électrique composé de deux circuits 11CL et 22CL rassemblés dans un
seul circuit électrique à travers un condensateur C . dEn partant des équations du
mouvement du système mécanique.
0
0
12222
21111
kxxkkxm
kxxkkxm
(5.44)
et en utilisant les analogies électromécaniques (analogie force-tension) suivantes:
tUtF
R
ix
qxC
k
Lm
1
(5.45)
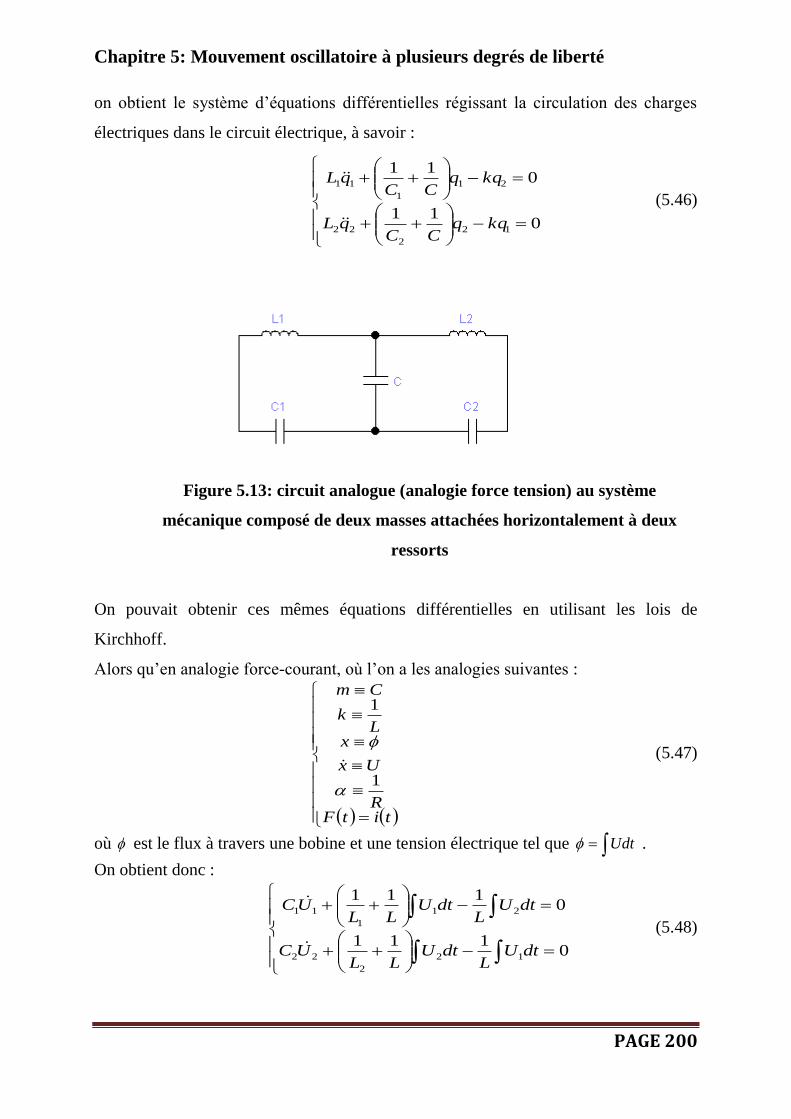
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 200
on obtient le système d’équations différentielles régissant la circulation des charges
électriques dans le circuit électrique, à savoir :
011
011
12
2
22
21
1
11
kqqCC
qL
kqqCC
qL
(5.46)
Figure 5.13: circuit analogue (analogie force tension) au système
mécanique composé de deux masses attachées horizontalement à deux
ressorts
On pouvait obtenir ces mêmes équations différentielles en utilisant les lois de
Kirchhoff.
Alors qu’en analogie force-courant, où l’on a les analogies suivantes :
titFR
Ux
xL
k
Cm
1
1
(5.47)
où est le flux à travers une bobine et une tension électrique tel que Udt .
On obtient donc :
0111
0111
12
2
22
21
1
11
dtUL
dtULL
UC
dtUL
dtULL
UC
(5.48)
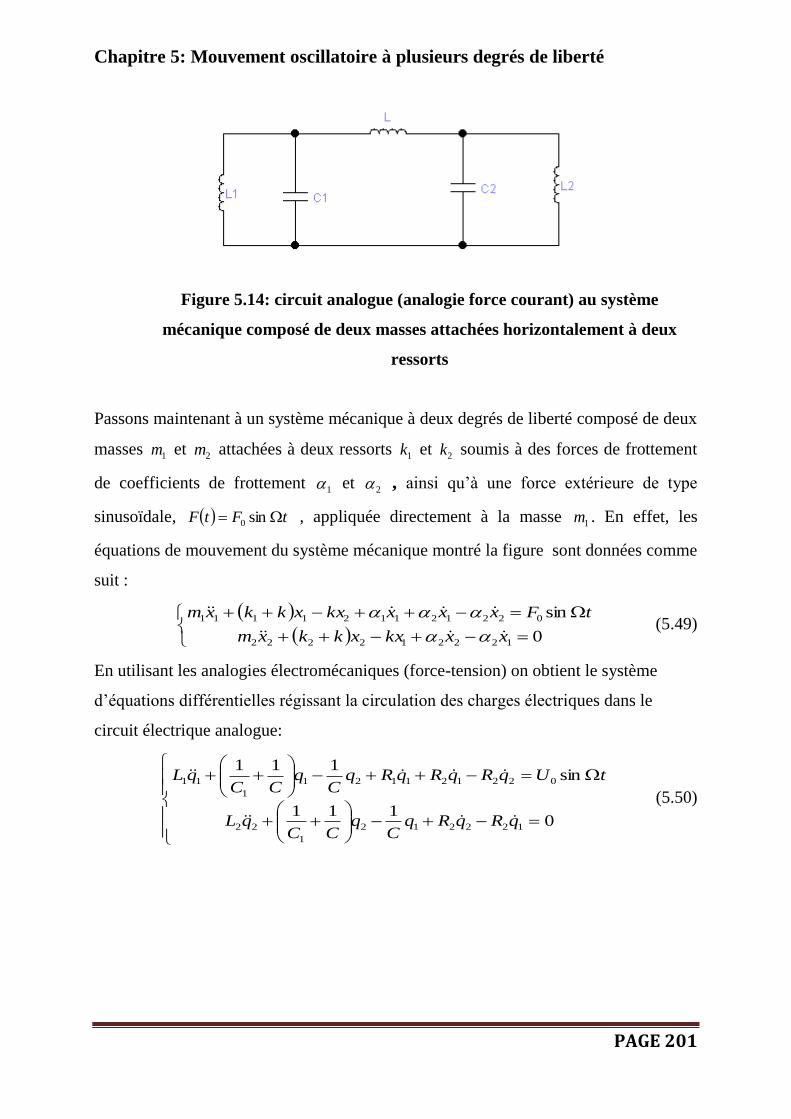
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 201
Figure 5.14: circuit analogue (analogie force courant) au système
mécanique composé de deux masses attachées horizontalement à deux
ressorts
Passons maintenant à un système mécanique à deux degrés de liberté composé de deux
masses 1m et 2m attachées à deux ressorts 1k et 2k soumis à des forces de frottement
de coefficients de frottement 1 et 2 , ainsi qu’à une force extérieure de type
sinusoïdale, tFtF sin0 , appliquée directement à la masse 1m . En effet, les
équations de mouvement du système mécanique montré la figure sont données comme
suit :
0
sin
122212222
022121121111
xxkxxkkxm
tFxxxkxxkkxm
(5.49)
En utilisant les analogies électromécaniques (force-tension) on obtient le système
d’équations différentielles régissant la circulation des charges électriques dans le
circuit électrique analogue:
0111
sin111
122212
1
22
022121121
1
11
qRqRqC
qCC
qL
tUqRqRqRqC
qCC
qL
(5.50)
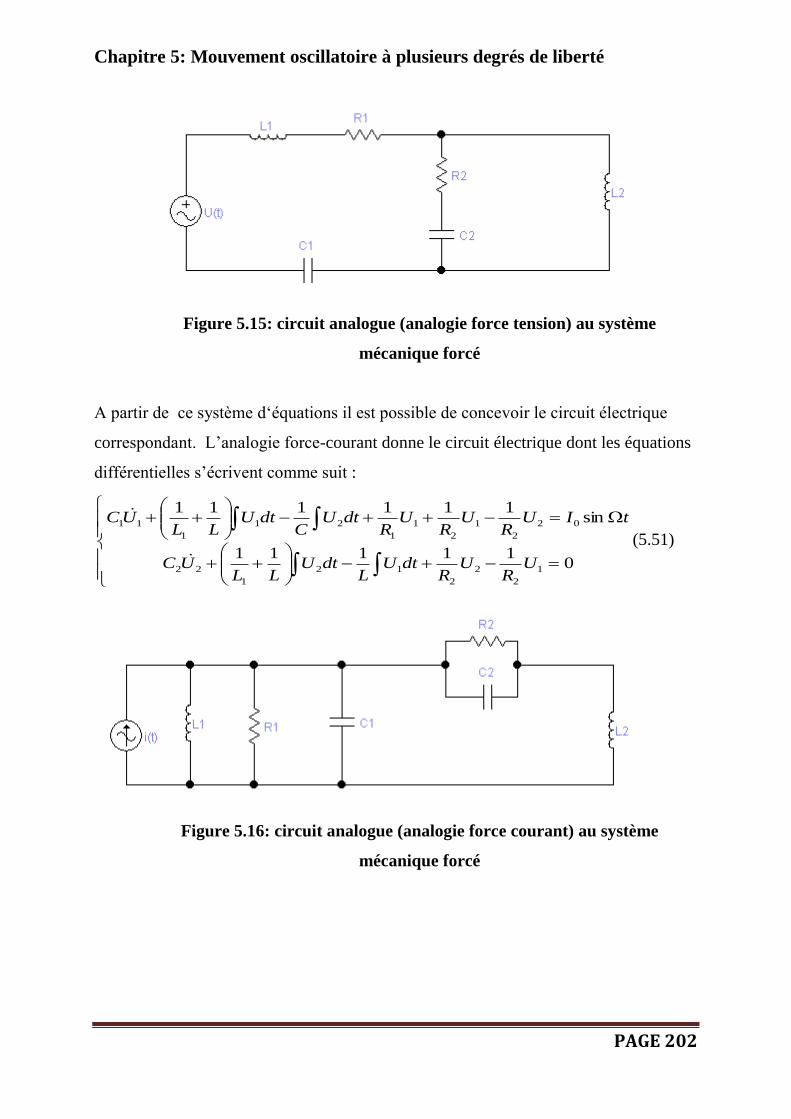
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 202
Figure 5.15: circuit analogue (analogie force tension) au système
mécanique forcé
A partir de ce système d‘équations il est possible de concevoir le circuit électrique
correspondant. L’analogie force-courant donne le circuit électrique dont les équations
différentielles s’écrivent comme suit :
011111
sin111111
1
2
2
2
12
1
22
02
2
1
2
1
1
21
1
11
UR
UR
dtUL
dtULL
UC
tIUR
UR
UR
dtUC
dtULL
UC
(5.51)
Figure 5.16: circuit analogue (analogie force courant) au système
mécanique forcé

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 203
5.6 Modes propres de vibration d’un système mécanique à trois
degrés de liberté:
Considérons le système mécanique de trois masses 1m , 2m et 3m attachées entre elles
horizontalement par des ressorts 1k , 2k , 3k et 4k . Les positions des masses par rapport
à leurs positions d’équilibre sont données par les variables 1x , 2x et 3x . Le mouvement
est dans ce cas exclusivement sur une droite.
Le système d’équations de mouvement du système s’écrit sous la forme suivante :
0
0
0
2334333
331223222
2212111
xkxkkxm
xkxkxkkxm
xkxkkxm
(5.52)
Ce qui peut être écrit sous la forme matricielle suivante
0
0
0
0
0
00
00
00
3
2
1
433
3322
221
1
2
1
3
2
1
x
x
x
kkk
kkkk
kkk
x
x
x
m
m
m
ou encore sous une forme plus condensée :
0 KXXM (5.53)
où
3
2
1
00
00
00
m
m
m
M ,
3
2
1
x
x
x
X et
433
3322
221
0
0
kkk
kkkk
kkk
K
Il est possible de récrire l’équation ci-dessus sous forme
01 KXMX (5.54)
où 1M est la matrice inverse de M
En posant KMA 1 , l’équation ci-dessus devient
0 AXX (5.55)
Si la matrice A est diagonalisable (ce qui est vrai dans notre cas) , celle-ci pourrait se
mettre sous la forme :
1 PDPA (5.56)

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 204
où P est une matrice dite de passage construite à partir des vecteurs propres de
A comme étant ses colonnes et D une matrice diagonale dont les éléments sont les
valeurs propres de la matrice A .
L’équation ci-dessus devient alors
01 XPDPX (5.57)
Multiplions l’équation ci-dessus par 1P :
0111 XPDPPXP (5.58)
où encore en faisant le changement de variable suivant :
XPU 1 (5.59)
avec
3
2
1
u
u
u
U , nous obtenons l’équation suivante :
0 DUU (5.60)
Cette équation est très intéressante car elle représente un système d’équations
différentielles découplé puisqu’elle fait intervenir une matrice diagonale. En effet,
l’équation ci-dessus peut se mettre sous une forme plus explicite :
0
0
0
333
222
111
uu
uu
uu
(5.61)
où 1 , 2 et 3 sont les valeurs propres de la matrice A .
Les solutions de ces trois équations différentielles sont données par :
3333
2222
1111
cos
cos
cos
tCtu
tCtu
tCtu
(5.62)
Les variables 1u , 2u et 3u sont appelées coordonnées normales puisqu’elles permettent
de découpler un système linéaire d’équations différentielles. En plus, elles représentent
des mouvements harmoniques simples du système avec trois pulsations d’oscillations :
11 , 22 et 33 ; c’est à dire les modes propres du système.
Cependant, il est intéressant d’avoir l’évolution des coordonnées 1x , 2x et 3x .

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 205
Pour cela, on utilise l’équation :
PUX (5.63)
où encore
3
2
1
333231
132221
131211
3
2
1
u
u
u
PPP
PPP
PPP
x
x
x
Ce qui donne
3332321313
3232221212
3132121111
uPuPuPtx
uPuPuPtx
uPuPuPtx
(5.64)
Les mouvements des masses du système sont finalement des combinaisons linéaires de
mouvements harmoniques simples (modes propres du système) avec les pulsations
correspondantes. Ces résultats nous ramène impérativement à diagonaliser la matrice
A afin que l’étude du mouvement des masses soit complètement établie.
En guise d’exemple d’application, prenons le cas du système mécanique ci-dessus
avec des masses et des ressorts égaux. La matrice correspondante s’écrit sous la forme
210
121
012
m
kA
(5.65)
Il est facile de vérifier que les valeurs propres de cette matrice et partant les pulsations
propres du système sont données par :
m
k
m
k
m
k
m
k
m
k
m
k
2222
22
2222
33
22
11

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 206
Avec les vecteurs propres correspondants :
1
2
1
1V ,
1
0
1
2V et
1
2
1
3V
La matrice de passage s’écrit donc sous la forme :
121
101
121
P
Il serait utile de donner une interprétation des valeurs des vecteurs propres ci- dessus.
En effet, chaque vecteur propre correspond à un mode de vibration, et plus
précisemment , chaque composante du vecteur donne le rapport d’amplitude de
mouvement des différentes masses dans un mode donné. C’est ainsi que le vecteur
1
2
1
1V , correspondant à la pulsation propre m
k221 , indique que les trois
masses oscillent toutes les trois en phase (les signes des composantes sont positives)
avec la deuxième masse qui a une amplitude 2 fois plus grande que les amplitudes
des autres masses.
Les solutions générales de mouvement des masses s’écrivent :
3
2
1
3
2
1
111
202
111
u
u
u
x
x
x
ou encore
3332221113
3331112
3332221111
coscoscos
cos20cos2
coscoscos
tCtCtCtx
tCtCtx
tCtCtCtx
(5.66)
où 1C , 2C , 3C , 1 , 2 et 3 sont des constantes à définir avec les conditions initiales.
Les formes des solutions indique que les masses, dans le premier mode, oscillent en
phase avec les mêmes amplitudes pour la première et la troisième masse, alors que
celle au milieu a une amplitude 2 fois plus grande. Dans le deuxième mode, la masse
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 207
au milieu est immobile, alors que les deux autres masses oscillent en opposition de
phase mais avec les amêmes amplitudes. Dans le troisième mode, la première et la
troisième masse oscillent en phase avec la même amplitude mais en opposition de
phase avec la masse au milieu qui elle oscille avec une mplitude 2 fois plus grande.
De cette façon, tous les aspects du mouvement des masses du système sont établis ; il
ne reste qu’appliquer les conditions initiales (préparation du système) et voir comment
le système évoluera. En effet, cette procédure peut être facilement appliquée à un
système de plusieurs degrés de liberté. Il suffit juste de pouvoir diagonaliser des
matrices de plus en plus grandes, ce qui nécessite le recours à des méthodes
numériques bien établies.
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 208
Applications
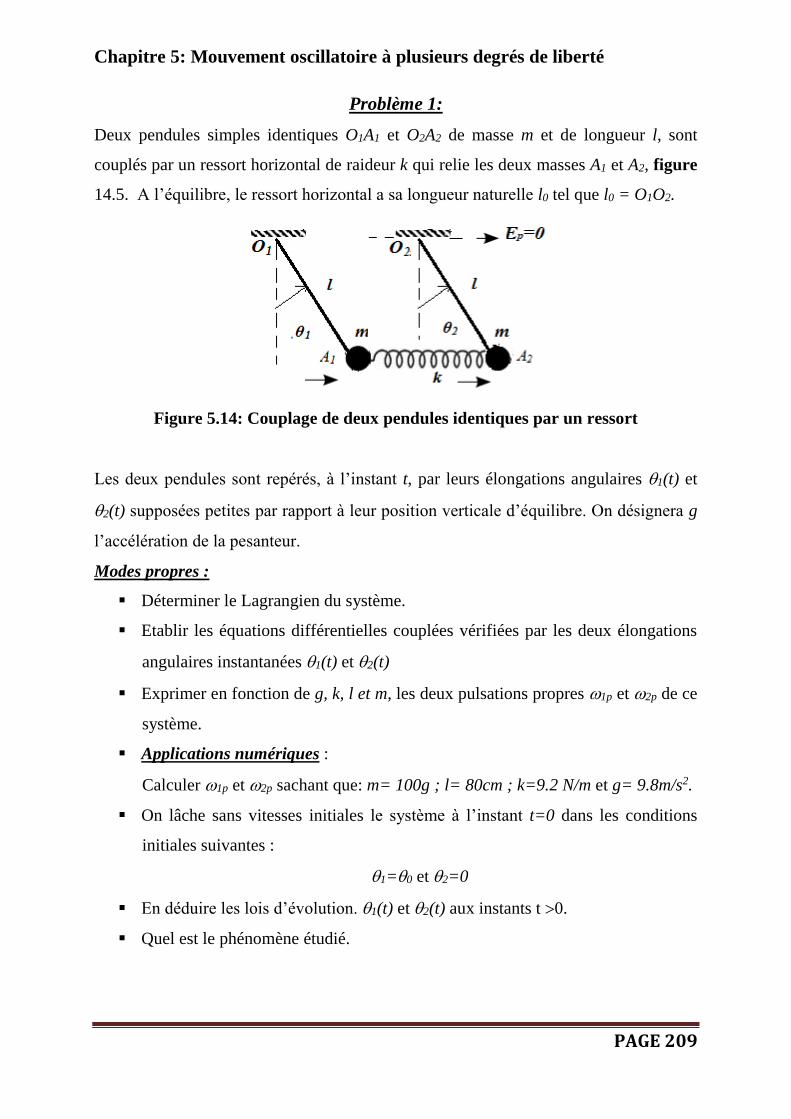
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 209
Problème 1:
Deux pendules simples identiques O1A1 et O2A2 de masse m et de longueur l, sont
couplés par un ressort horizontal de raideur k qui relie les deux masses A1 et A2, figure
14.5. A l’équilibre, le ressort horizontal a sa longueur naturelle l0 tel que l0 = O1O2.
Figure 5.14: Couplage de deux pendules identiques par un ressort
Les deux pendules sont repérés, à l’instant t, par leurs élongations angulaires 1(t) et
2(t) supposées petites par rapport à leur position verticale d’équilibre. On désignera g
l’accélération de la pesanteur.
Modes propres :
Déterminer le Lagrangien du système.
Etablir les équations différentielles couplées vérifiées par les deux élongations
angulaires instantanées 1(t) et 2(t)
Exprimer en fonction de g, k, l et m, les deux pulsations propres 1p et 2p de ce
système.
Applications numériques :
Calculer 1p et 2p sachant que: m= 100g ; l= 80cm ; k=9.2 N/m et g= 9.8m/s2.
On lâche sans vitesses initiales le système à l’instant t=0 dans les conditions
initiales suivantes :
1=0 et 2=0
En déduire les lois d’évolution. 1(t) et 2(t) aux instants t 0.
Quel est le phénomène étudié.

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 210
Modes forcés :
La masse A est soumise à une force excitatrice horizontale de forme :
)tcos(F)t(F 0
Ecrire les nouvelles équations différentielles couplées en 1(t) et 2(t).
Exprimer les relations complexes qui concernent les vitesses linéaires V1 et V2
des points A1 et A2 en régime forcé.
En déduire l’impédance d’entrée complexe1
e
V~F
Z .
Solution :
Le Lagrangien du système :
Le système a deux degrés de liberté exprimés en θ1, θ2
L’énergie cinétique on a :
2m2
2m1c 21
Vm2
1Vm
2
1E
En calculant les vitesses par rapport au repère fixe :
2m
2m
2m
2m
2m
2m
22m
22mm
2m
2m
2
11m
11mm
1m
1m
1
222
111
2
2
2
2
2
1
1
1
1
1
yxV
yxV
)sinly
coslx(V)
cosly
sinlx(mO
)sinly
coslx(V)
cosly
sinlx(mO
D’où :
2i
2
1i
2c ml
2
1E
Pour l’énergie potentielle on a :
2
1i
i2
21p cosmgl)ll(k2
1E
Le Lagrangien s’écrit alors :
2
1
2
21
22
1
2
2121 cos)(2
1
2
1),,,(
i
ii
i
mglllkmlL
Les équations différentielles couplées sont :
122
211
22
11
m
k)
m
k
l
g(
m
k)
m
k
l
g(
0L
)L
(dt
d
0L
)L
(dt
d

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 211
Les pulsations propres 1p et 2p:
On considère les solutions du système de type sinusoïdal :
)t(j
2
)t(j
1
p
p
Be)t(
Ae)t(
En remplaçant les solutions dans le système différentiel, On
obtient un système linéaire symétrique suivant :
0B)m
k
l
g(A
m
k
0Bm
kA)
m
k
l
g(
2p
2p
Le système admet des solutions non nulles si seulement si :
0det
D’où :
0)()(
2
22 m
k
m
k
l
gp
Les deux pulsations propres sont :
sradm
k
l
g
sradl
g
pp
pp
/142
/5.3
2
2
2
1
2
1
Les solutions générales s’écrivent :
)cos()cos()(
)cos()cos()(
22112
22111
tBtBt
tAtAt
pp
pp
En appliquant les conditions initiales, on trouve :
ttCtx
ttCtx
pppp
pppp
2sin
2sin)(
2cos
2cos)(
2121
2
2121
1
D’où les solutions générales s’expriment alors comme suit:
tettAvec
ttctx
ttctx
pppp
22
sinsin)(
coscos)(
1212
2
1
Le phénomène étudié est les battements.
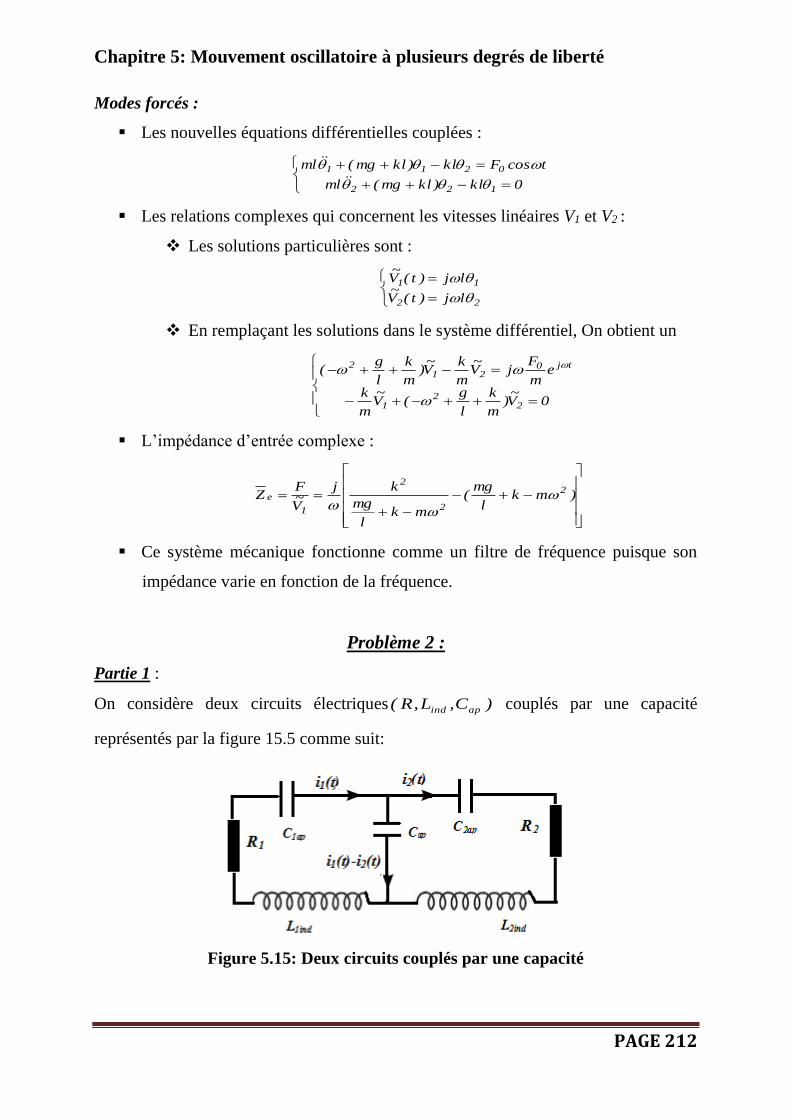
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 212
Modes forcés :
Les nouvelles équations différentielles couplées :
0kl)klmg(ml
tcosFkl)klmg(ml
122
0211
Les relations complexes qui concernent les vitesses linéaires V1 et V2 :
Les solutions particulières sont :
22
11
lj)t(V~
lj)t(V~
En remplaçant les solutions dans le système différentiel, On obtient un
0V~
)m
k
l
g(V
~
m
k
em
FjV
~
m
kV~
)m
k
l
g(
22
1
tj021
2
L’impédance d’entrée complexe :
)mkl
mg(
mkl
mg
kj
V~F
Z 2
2
2
1
e
Ce système mécanique fonctionne comme un filtre de fréquence puisque son
impédance varie en fonction de la fréquence.
Problème 2 :
Partie 1 :
On considère deux circuits électriques )C,L,R( apind couplés par une capacité
représentés par la figure 15.5 comme suit:
Figure 5.15: Deux circuits couplés par une capacité

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 213
Quel est le nombre de degré de liberté ?
Déterminer le Lagrangien du système.
Donner les équations du mouvement
Partie 2 :
On néglige les résistances des deux circuits. On prend les nouvelles grandeurs
physiques telles que :
indind2ind1 LLL , apap2ap1 CCC et apind
2
0CL
1 .
Etablir les nouvelles équations différentielles du mouvement.
En déduire les pulsations propres du système en fonction de 0.
Donner les solutions générales.
Quel est le modèle mécanique équivalent ?
Solution:
Partie 1 :
Le nombre de degré de liberté est 2 car les deux courants parcourus dans les
deux circuits sont différents.
Le Lagrangien du système est exprimé comme suit :
2
1
22
21
22
1
2121
1
2
1)(
2
1
2
1),,,(ˆ
i
iiapap
i
i
iind qC
qqC
qLqqqqL
Le système différentiel s’écrit:
0qC
1q)
C
1
C
1(qL
0qC
1q)
C
1
C
1(qL
1ap
2apap2
2ind2
2ap
1apap1
1ind1

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 214
Partie 2 :
Les nouvelles équations du mouvement :
0qC
1q
C
2qL
0qC
1q
C
2qL
1ap
2ap
2ind
2ap
1ap
1ind
Les pulsations propres :
On considère les solutions du système de type sinusoïdales :
)t(j
2
)t(j
1
p
p
Be)t(q
Ae)t(q
En remplaçant les solutions dans le système différentiel, On obtient un
système linéaire symétrique suivant :
0AC
1B)
C
2L(
0BC
1A)
C
2L(
apap
2pap
apap
2pind
Le système admet des solutions non nulles si seulement si :
0det
D’où :
0)C
1()
C
1L( 2
ap
2
ap
2pind
Les deux pulsations propres sont :
apind
2p2
apind
2p1
CL
3
CL
1
Les solutions générales sont exprimées comme suit :
)tcos(B)tcos(B)t(q
)tcos(A)tcos(A)t(q
p22p112
p22p111
Le système mécanique équivalent est représenté par la figure 16.5 comme suit:
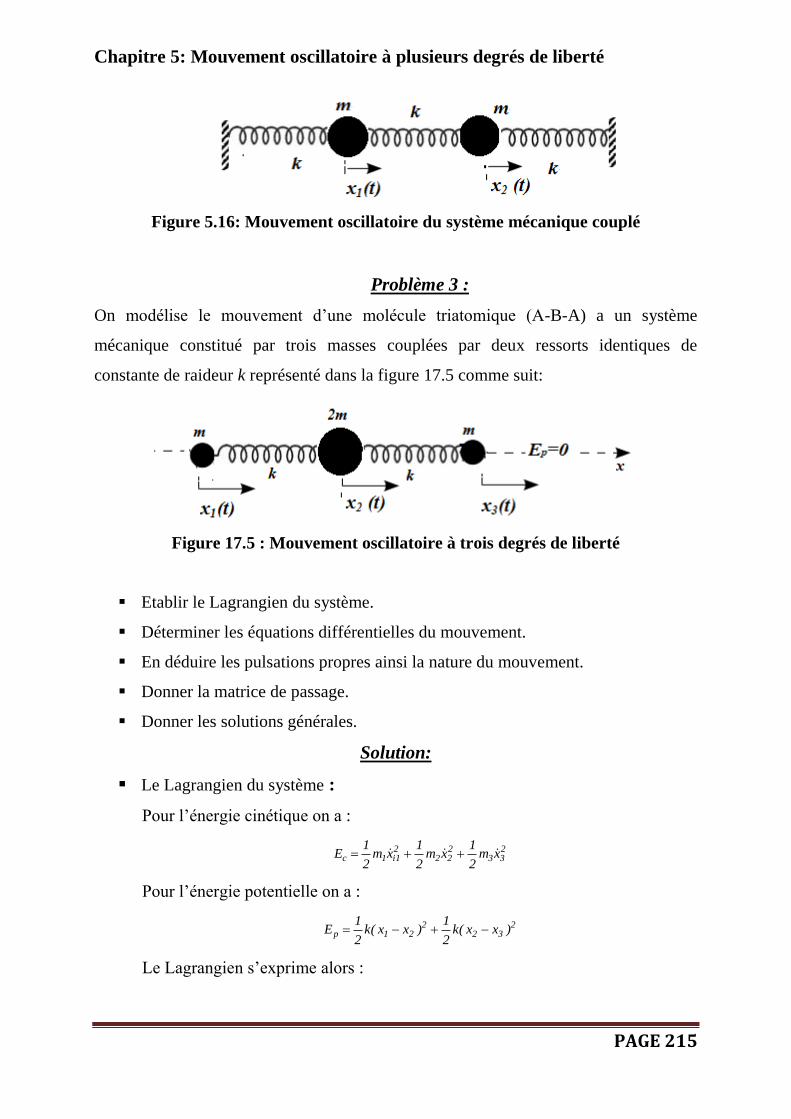
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 215
Figure 5.16: Mouvement oscillatoire du système mécanique couplé
Problème 3 :
On modélise le mouvement d’une molécule triatomique (A-B-A) a un système
mécanique constitué par trois masses couplées par deux ressorts identiques de
constante de raideur k représenté dans la figure 17.5 comme suit:
Figure 17.5 : Mouvement oscillatoire à trois degrés de liberté
Etablir le Lagrangien du système.
Déterminer les équations différentielles du mouvement.
En déduire les pulsations propres ainsi la nature du mouvement.
Donner la matrice de passage.
Donner les solutions générales.
Solution:
Le Lagrangien du système :
Pour l’énergie cinétique on a :
233
222
21i1c xm
2
1xm
2
1xm
2
1E
Pour l’énergie potentielle on a :
232
221p )xx(k
2
1)xx(k
2
1E
Le Lagrangien s’exprime alors :

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 216
232
221
2i
3
1i
i )xx(k2
1)xx(k
2
1xm
2
1L
L’équation différentielle :
0kxkxxm
0kxkxkx2xm2
0kxkxxm
0x
L)
x
L(
dt
d
0x
L)
x
L(
dt
d
0x
L)
x
L(
dt
d
233
3122
211
33
22
11
Les pulsations propres :
On considère les solutions du système de type sinusoïdal :
)t(j
3
)t(j
2
)t(j
1
p
p
p
Ce)t(x
Be)t(x
Ae)t(x
En remplaçant les solutions dans le système différentiel, On obtient un
système linéaire suivant :
0kBC)km(
0kCkAB)k2m2(
0kBA)km(
2p
2p
2p
Le système admet des solutions non nulles si seulement si :
0det
D’ou
0]k)km)[(km( 222p
2p
Les pulsations propres sont :
m
k2
0
m
k
2p3
2p2
2p1
La matrice de passage s’écrit:
000
110
111
P
La solution générale est :
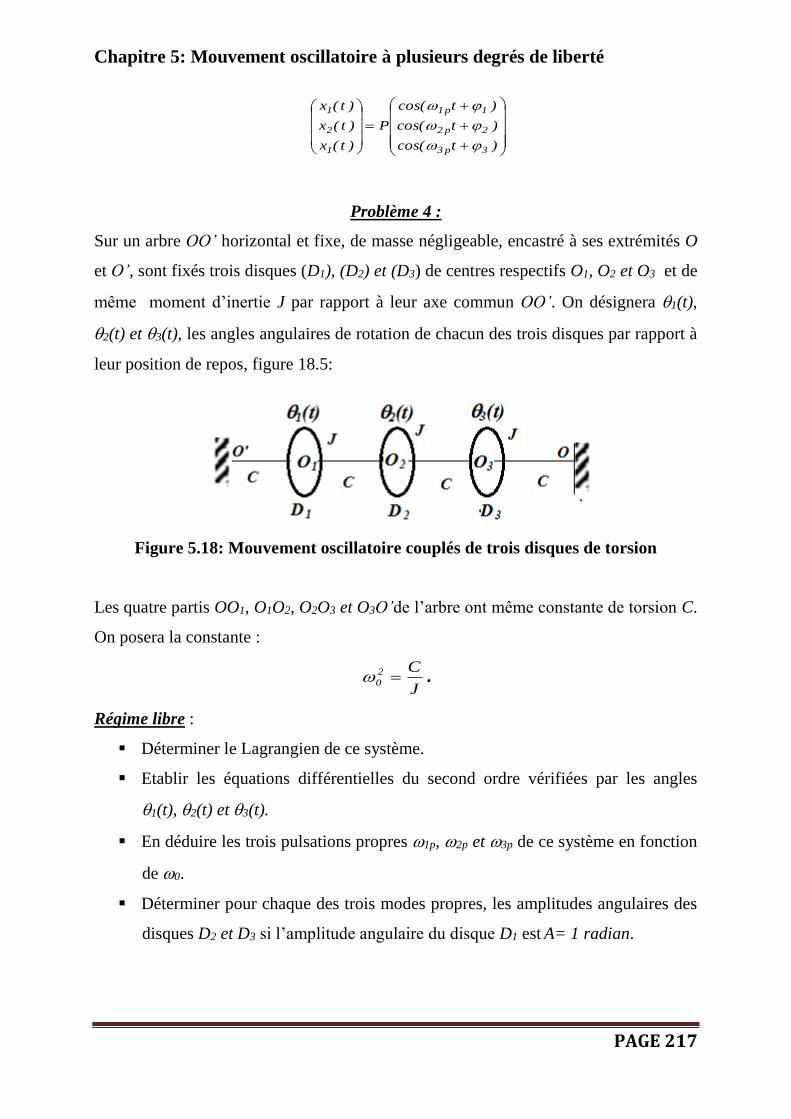
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 217
)tcos(
)tcos(
)tcos(
P
)t(x
)t(x
)t(x
3p3
2p2
1p1
1
2
1
Problème 4 :
Sur un arbre OO’ horizontal et fixe, de masse négligeable, encastré à ses extrémités O
et O’, sont fixés trois disques (D1), (D2) et (D3) de centres respectifs O1, O2 et O3 et de
même moment d’inertie J par rapport à leur axe commun OO’. On désignera 1(t),
2(t) et 3(t), les angles angulaires de rotation de chacun des trois disques par rapport à
leur position de repos, figure 18.5:
Figure 5.18: Mouvement oscillatoire couplés de trois disques de torsion
Les quatre partis OO1, O1O2, O2O3 et O3O’de l’arbre ont même constante de torsion C.
On posera la constante :
J
C2
0 .
Régime libre :
Déterminer le Lagrangien de ce système.
Etablir les équations différentielles du second ordre vérifiées par les angles
1(t), 2(t) et 3(t).
En déduire les trois pulsations propres 1p, 2p et 3p de ce système en fonction
de 0.
Déterminer pour chaque des trois modes propres, les amplitudes angulaires des
disques D2 et D3 si l’amplitude angulaire du disque D1 est A= 1 radian.

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 218
Calculer l’énergie mécanique totale ET de cette chaîne de trois disques, pour
chacun des modes propres, en fonction de C et de l’amplitude angulaire 10 du
disque D1.
Régime forcé :
On applique au seul disque (D1) un couple moteur de moment sinusoïdal, de pulsation
réglable et d’amplitude 0.
)tcos()t( 0 ,
Etablir en fonction du paramètre 2
0
)(X
, les amplitudes angulaires A1, A2 et
A3 de chacun des disques en régime forcé.
Pour quelles valeurs de X ce système est il en résonance ?
Solution:
Régime libre :
Le Lagrangien de ce système :
Pour l’énergie cinétique on a :
23i
22
21c J
2
1J
2
1J
2
1E
Pour l’énergie potentielle on a :
21
23
232
221p C
2
1C
2
1)(C
2
1)(C
2
1E
Le Lagrangien s’exprime alors :
2
1
2
3
2
32
2
21
23
1
3213212
1
2
1)(
2
1)(
2
1
2
1),,,,,( CCCCJL i
i
Les équations différentielles sont :
0)2(
0)2(
0)2(
0)(
0)(
0)(
23
2
03
312
2
02
21
2
01
33
22
11
LL
dt
d
LL
dt
d
LL
dt
d
Les pulsations propres :
On considère les solutions du système de type sinusoïdal :

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 219
)t(j
3
)t(j
2
)t(j
1
p
p
p
Ce)t(
Be)t(
Ae)t(
En remplaçant les solutions dans le système différentiel, On obtient un
système linéaire suivant :
0BC)2(
0CAB)2(
0BA)2(
20
20
2p
20
20
20
2p
20
20
2p
Le système admet des solutions non nulles si seulement si :
0det
Avec
0
20
2
02
20
2p
20
20
20
2p
20
20
20
2p
D’ou :
0])2()2)[(22( 220
22p
20
20
2p
Les pulsations propres sont :
22
22
2
0p3
0p2
0p1
Les amplitudes angulaires des disques D2 et D3
32120p3p
32120p2p
2320p1p
2222
2222
02
L’énergie mécanique totale ET :
21
23
232
221
2i
3
1i
T C2
1C
2
1)(C
2
1)(C
2
1J
2
1E
Régime forcé :
Les amplitudes angulaires A1, A2 et A3 :

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 220
0)2(
0)2(
)tcos()(CCJ
0L
)L
(dt
d
0L
)L
(dt
d
ML
)L
(dt
d
23203
312202
02111
33
22
i
ext11
En régime forcé les solutions particulières sont de la forme:
tj33
tj22
tj11
eA)t(
eA)t(
eA)t(
En remplaçant dans le système différentiel, on obtient le résultat
suivant :
)X22)(X22)(X2(
1
CA
)X22)(X22(
1
CA
)X22)(X22)(X2(
)X3)(X1(
CA
03
02
01
Ce système entre en résonnance pour les valeurs de X, comme suit :
22X
22X
2X
Problème 5 :
On considère trois pendules simples identiques, de masses m, de longueur l, présentés
dans la figure 19.5. Les masses sont reliées entre elles par l’intermédiaire de deux
ressorts identiques, de raideur k. A l’équilibre, les pendules sont verticaux, les trois
masses sont équidistantes sur une même, et les ressorts ont leur longueur naturelle. Le
système en mouvement est défini, à l’instant t, par les élongations angulaires θ1, θ2, θ3
des pendules avec la verticale descendante.
On posera les constantes suivantes :
m
k20 et
l
g20 .

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 221
Figure 5.19: Mouvement oscillatoire couplés de trois pendules
Déterminer le Lagrangien du système
Etablir les équations différentielles du second ordre vérifiées par les élongations
angulaires θ1(t), θ2(t), et θ3(t) pour les petites oscillations du système.
Déterminer les pulsations propres du système.
Application numérique :
On prend : m=1kg, k=10N/m ; l=1m, g=10m s-2. Calculer les pulsations
propres.
Déterminer le rapport des amplitudes angulaires A
B et
A
C pour chacun des
modes propres de ce système.
Solution:
Le Lagrangien du système :
Le système a trois degrés de liberté représentés par : θ1, θ2, θ3.
L’énergie cinétique s’exprime:
23
222
22i
2c ml
2
1ml
2
1ml
2
1E
Pour l’énergie potentielle on a :
3
1i
i2
322
21p cosmgl)ll(k2
1)ll(k
2
1E
Le Lagrangien s’exprime comme suit :

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 222
3
1
2
32
2
21
23
1
2
321321 cos)(2
1)(
2
1
2
1),,,,,(
i
ii
i
mglllkllkmlL
L’équation différentielle :
0)(
0)2(
0)(
0)(
0)(
0)(
2
2
03
2
0
2
03
3
2
01
2
02
2
0
2
02
2
2
01
2
0
2
01
33
22
11
LL
dt
d
LL
dt
d
LL
dt
d
Les pulsations propres :
On considère les solutions du système de type sinusoïdal :
)t(j
3
)t(j
2
)t(j
1
p
p
p
Ce)t(
Be)t(
Ae)t(
En remplaçant les solutions dans le système différentiel, On obtient un
système linéaire suivant :
0BC)(
0CAB)2(
0BA)(
20
20
20
2p
20
20
20
20
2p
20
20
20
2p
Le système admet des solutions non nulles si seulement
0det
Avec :
0
0
2
0
20
20
2p
20
20
20
20
2p
20
20
20
20
2p
D’ou :
0]3)32()[( 20
20
40
2p
20
20
4p
20
20
2p
Les pulsations propres sont alors:
s/rad32.63
s/rad46.4
s/rad16.3
p20
20p3
p20
20p2
p0p1

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 223
Les rapports des amplitudes sont :
1A
C2
A
B3
1A
C0
A
B
1A
C1
A
B
20
20p3
20
20p2
0p1
Problème 6:
Soit le système mécanique, constitué de deux pendules simples de longueur l et de
masses m1, m2 représentés dans la figure 20.5 comme suit :
Figure 5.20: Couplage de deux pendules simples par la masse
Etablir le Lagrangien du système
Donner les équations différentielles du mouvement pour les faibles oscillations.
On pose les constantes suivantes :
l
g2
0 et2
1
m
m .
Déterminer dans ce cas les pulsations propres du système 1p et 2p en fonction
des paramètres et 0.
Déterminer les solutions générales
Solution:
Le Lagrangien du système s’écrit : est déjà calculé dans le problème (1.1-B)
)cos(cosglmcosglm
)cos(lmlm2
1l)mm(
2
1L
21211
21212
222
22
21
221

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 224
Le système différentiel devient :
0gll
0g)mm(lml)mm(
0L
)L
(dt
d
0L
)L
(dt
d
212
12122121
22
11
D’ou :
0
0)1()1(
22012
12021
Avec :
l
get
m
m 20
2
1
Les pulsations propres :
On considère les solutions du système de type sinusoïdal :
)t(j
2
)t(j
1
p
p
Be)t(
Ae)t(
En remplaçant les solutions dans le système différentiel, On obtient un
système linéaire symétrique suivant :
0B)(A
0BA)1)((20
2p
2p
2p
20
2p
Le système admet des solutions non nulles si seulement si :
0det
D’où
0)1()( 4p
220
2p
Les deux pulsations propres sont 1p et 2p exprimées comme suit :
20
2p1
20
2p1
11
1
11
1
Les solutions générales sont de la forme:
)tcos(B)tcos(B)t(
)tcos(A)tcos(A)t(
p22p112
p22p111

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 225
Problème 7:
Un ressort est relié par ses deux extrémités a deux points matériels, B de masse M et P
de masse m, figure 21.5. Ce dernier peut se déplacer sans frottement le long de l’axe
Ox tandis que B est fixe à l’extrémité inferieur d’un fil inextensible, de longueur l=OA,
de masse négligeable, accroche en a un support horizontal et pouvant tourner
librement autour de l’axe Az . Le ressort a une masse négligeable, une raideur k et une
longueur a vide également négligeable. Il a la possibilité, avec P, d’être à gauche ou à
droite de B. le champ de pesanteur est de la forme yugg
et on suppose que l’angle
(t) défini par l’attitude du fil relativement à la verticale reste petit.
Figure 5.21: Couplage pendule simple avec un oscillateur harmonique
Etablir le Lagrangien du système
Déterminer les équations du mouvement
On pose les constantes suivantes :
l
g20 ,
m
k21 ,
M
k22 et
21
20
2r
.
Mettre les équations du mouvement en fonction les paramètres 0, 1 et 2.
On cherche une solution de la forme :
tj
ppXex
et tj
BpYelY
.
Déterminer dans ce cas les modes propres p2p1 et
On n’admet désormais que m=M.

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 226
Exprimer les deux pulsations propres p2p1 et en fonction de r et 1.
En déduire la solution générale.
Solution:
Le Lagrangien du système :
Pour l’énergie cinétique on a :
22pc )l(M
2
1xm
2
1E
Pour l’énergie potentielle on a :
cosMgl)lx(k2
1E 2
pp
Le Lagrangien du système s’écrit :
cosMgl)lx(k2
1)l(M
2
1xm
2
1L 2
p22
p
Les équations du mouvement s’écrit:
0lxx
0xl)(l
0x
L)
x
L(
dt
d
0L
)L
(dt
d
21p
21p
p22
20
22
pp
Les solutions sont de la forme :
tjp Xex et tj
B YelY .
En remplaçant les solutions dans le système différentiel, On
obtient un système linéaire symétrique suivant :
0YX)(
0Y)(X21
21
2p
22
20
2p
22
Le système admet des solutions non nulles si seulement si :
0det
D’où :
0))(( 22
21
21
2p
22
20
2p

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 227
Les deux pulsations propres sont :
2
4)2(2
2
4)2(2
21
20
221
20
21
202
p2
21
20
221
20
21
202
p1
D’où :
21
20
21p2
21p1
2ravec
1r1r
1r1r
Les solutions générales :
)tcos(Y)tcos(Y)t(Y
)tcos(X)tcos(X)t(x
p22p11
p22p11p
Problème 8 :
Soit un pendule de masse m et de longueur l pivote autour de M qui glisse sans
frottement sur le plan horizontal, comme le montre la figure 22.5 comme suit :
Figure 5.22: Couplage pendule simple avec un oscillateur harmonique
Partie A :
Etablir l’énergie cinétique et l’énergie potentielle du système.
En déduire le Lagrangien du système ?
En déduire les équations différentielles de mouvements.
Déterminer les pulsations propres du système.
Trouver le rapport d’amplitude dans les modes normaux.
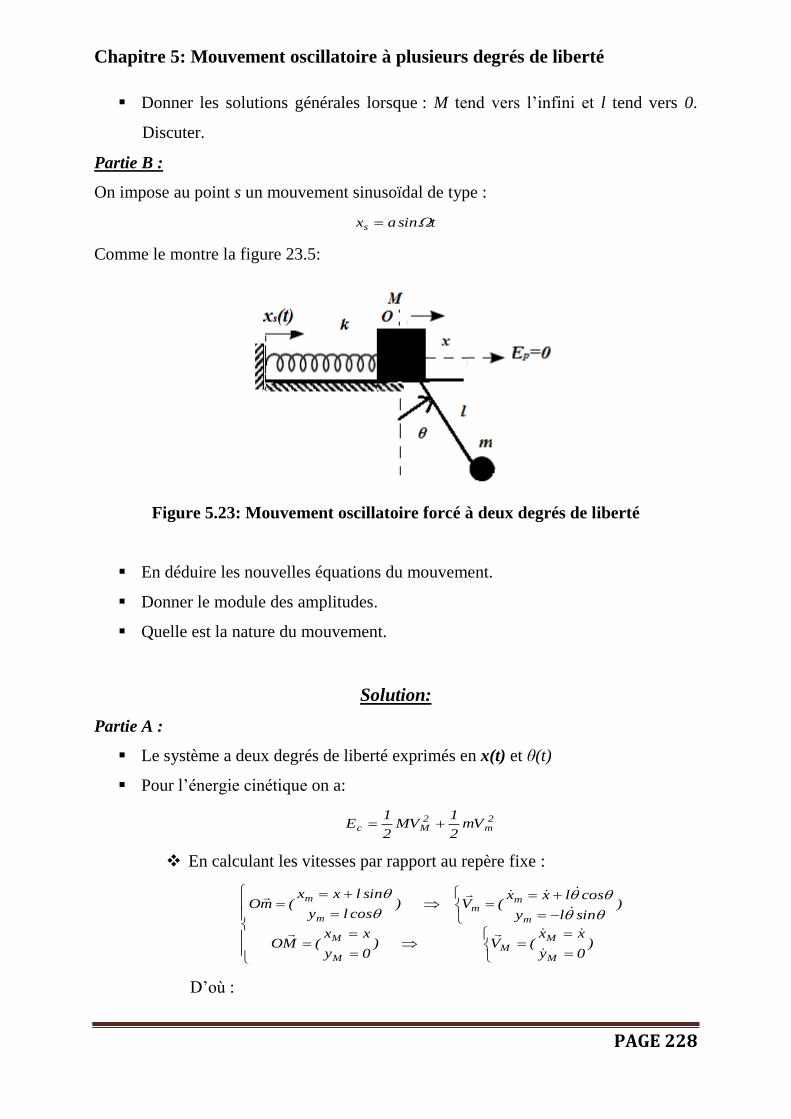
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 228
Donner les solutions générales lorsque : M tend vers l’infini et l tend vers 0.
Discuter.
Partie B :
On impose au point s un mouvement sinusoïdal de type :
tsinaxs
Comme le montre la figure 23.5:
Figure 5.23: Mouvement oscillatoire forcé à deux degrés de liberté
En déduire les nouvelles équations du mouvement.
Donner le module des amplitudes.
Quelle est la nature du mouvement.
Solution:
Partie A :
Le système a deux degrés de liberté exprimés en x(t) et θ(t)
Pour l’énergie cinétique on a:
2m
2Mc mV
2
1MV
2
1E
En calculant les vitesses par rapport au repère fixe :
)0y
xx(V)
0y
xx(MO
)sinly
coslxx(V)
cosly
sinlxx(mO
M
MM
M
M
m
mm
m
m
D’où :
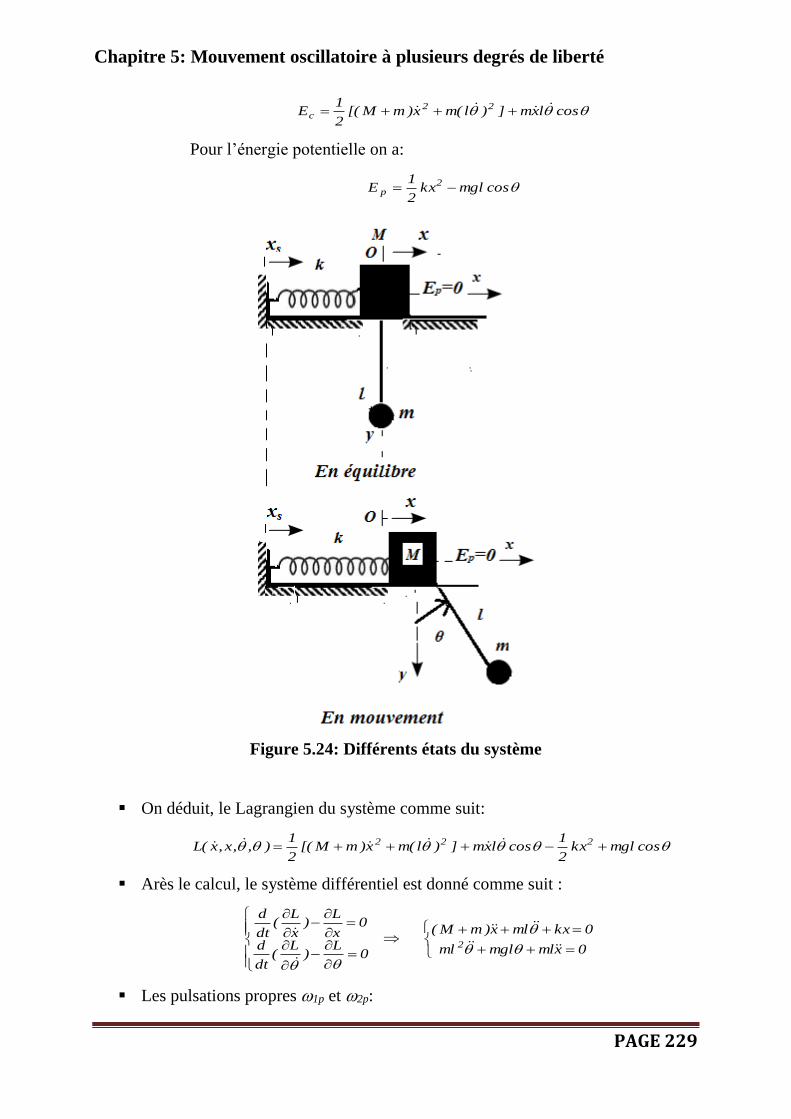
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 229
coslxm])l(mx)mM[(2
1E 22
c
Pour l’énergie potentielle on a:
cosmglkx2
1E 2
p
Figure 5.24: Différents états du système
On déduit, le Lagrangien du système comme suit:
cosmglkx2
1coslxm])l(mx)mM[(
2
1),,x,x(L 222
Arès le calcul, le système différentiel est donné comme suit :
0xmlmglml
0kxmlx)mM(
0L
)L
(dt
d
0x
L)
x
L(
dt
d
2
Les pulsations propres 1p et 2p:

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 230
On considère les solutions du système de type sinusoïdales :
)t(j
)t(j
p
p
Ae)t(x
Be)t(
En remplaçant les solutions dans le système différentiel, On
obtient un système linéaire symétrique suivant :
0B]gl[A
0BmlA]k)mM([2p
2p
2p
2p
Le système admet des solutions non nulles si seulement si :
0det
D’où
0ml]gl][k)mM([ 4p
2p
2p
On obtient alors :
0kgM4]klg)mM[(Avec0kg]klg)mM[(Ml 22p
4p
Il existe donc deux pulsations propres sont 2
p2
2
p1 et comme suit :
]kgM4]klg)mM[(klg)mM[(2
1
]kgM4]klg)mM[(klg)mM[(2
1
22p1
22p1
Les rapports d’amplitudes sont calculés comme suit :
k)mM(
ml
B
A
k)mM(
ml
B
A
2p2
2p2
2p1
2p1
p2p
p1p
Les solutions générales sont données :
)tcos(B)tcos(B)t(
)tcos(A)tcos(A)t(x
p22p11
p22p11
La forme des solutions générales lorsqu’on a :
M tend vers l’infini :
Le système devient alors un pendule simple représenté comme suit :

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 231
Figure 5.25: système est équivalent a un pendule simple
l tend vers 0 :
Le système devient dans ce cas un simple oscillateur harmonique représenté
ans la figure 26.5:
Figure 5.26: Système est équivalent à un oscillateur simple
Partie B :
Les nouvelles équations du mouvement sont :
0xmlmglml
kaekxkxmlx)mM(2
tis
Les solutions particulières en régime permanant sont :
)t(ie)(A)t(x et )t(ie)(B)t(
En remplaçant dans le système différentiel, on obtient alors :
0B]gl[A
kaBmlA]k)mM([22
22
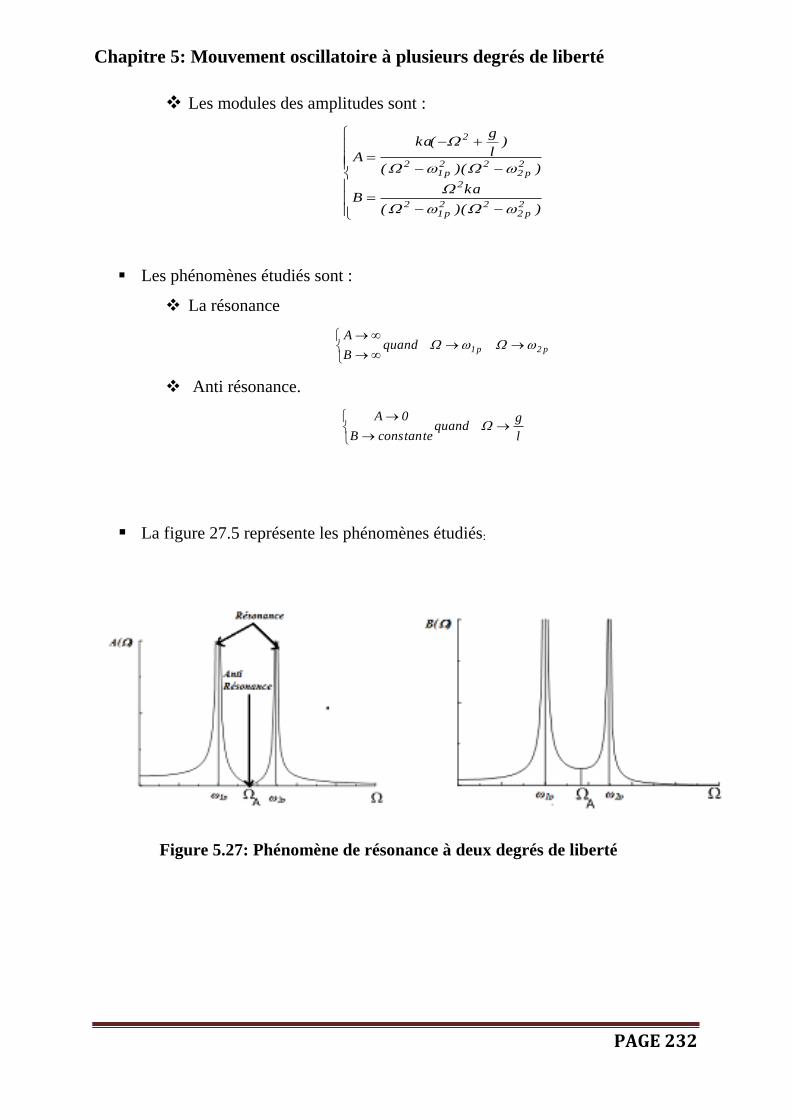
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 232
Les modules des amplitudes sont :
))((
kaB
))((
)l
g(ka
A
2p2
22p1
2
2
2p2
22p1
2
2
Les phénomènes étudiés sont :
La résonance
p2p1quandB
A
Anti résonance.
l
gquand
tetanconsB
0A
La figure 27.5 représente les phénomènes étudiés:
Figure 5.27: Phénomène de résonance à deux degrés de liberté
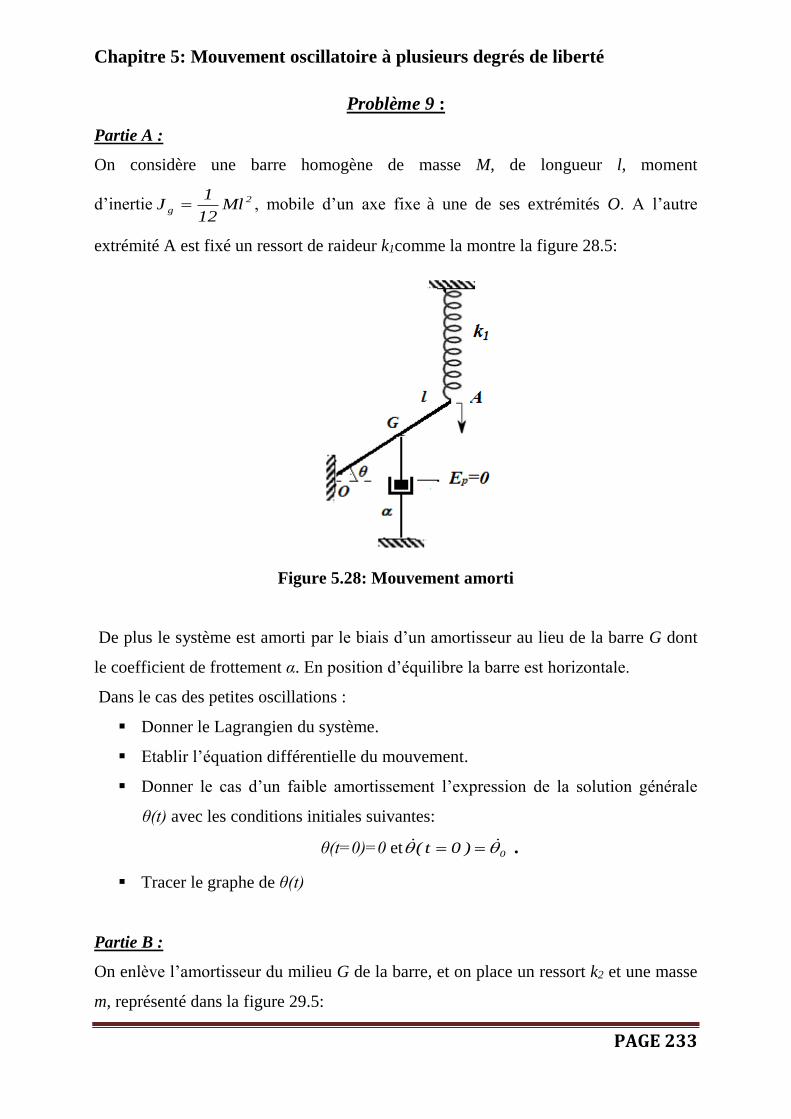
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 233
Problème 9 :
Partie A :
On considère une barre homogène de masse M, de longueur l, moment
d’inertie 2
g Ml12
1J , mobile d’un axe fixe à une de ses extrémités O. A l’autre
extrémité A est fixé un ressort de raideur k1comme la montre la figure 28.5:
Figure 5.28: Mouvement amorti
De plus le système est amorti par le biais d’un amortisseur au lieu de la barre G dont
le coefficient de frottement α. En position d’équilibre la barre est horizontale.
Dans le cas des petites oscillations :
Donner le Lagrangien du système.
Etablir l’équation différentielle du mouvement.
Donner le cas d’un faible amortissement l’expression de la solution générale
θ(t) avec les conditions initiales suivantes:
θ(t=0)=0 et 0)0t( .
Tracer le graphe de θ(t)
Partie B :
On enlève l’amortisseur du milieu G de la barre, et on place un ressort k2 et une masse
m, représenté dans la figure 29.5:
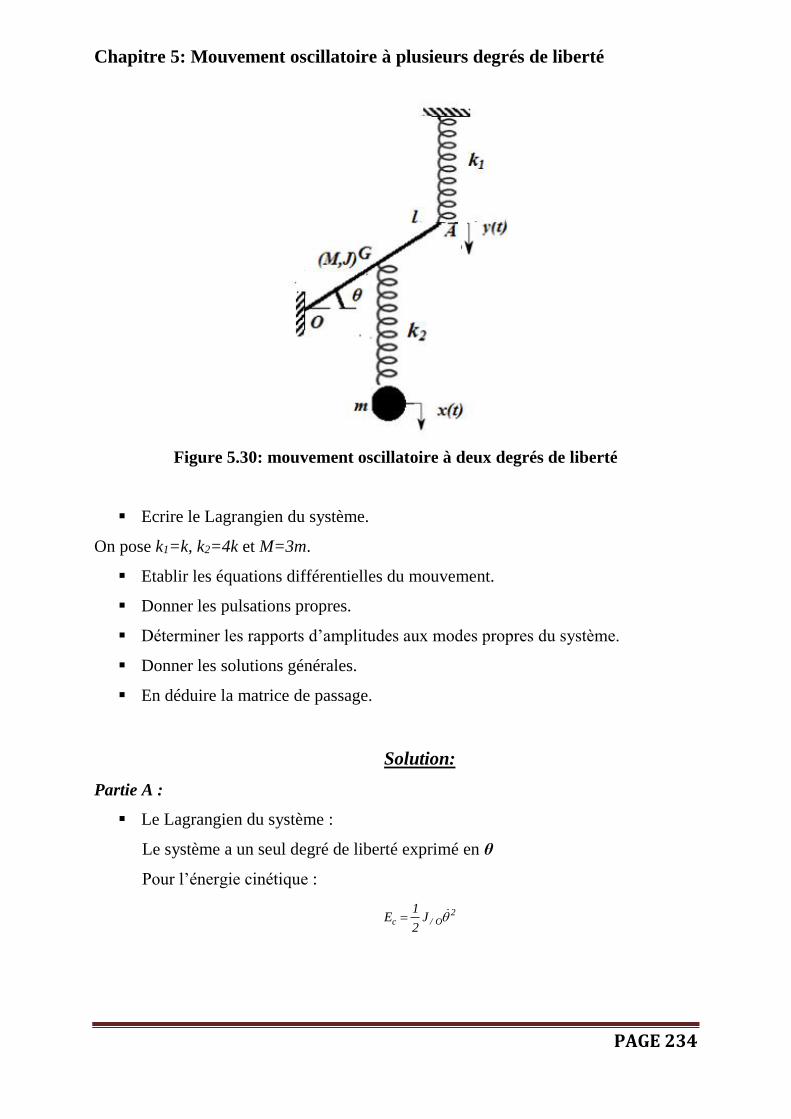
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 234
Figure 5.30: mouvement oscillatoire à deux degrés de liberté
Ecrire le Lagrangien du système.
On pose k1=k, k2=4k et M=3m.
Etablir les équations différentielles du mouvement.
Donner les pulsations propres.
Déterminer les rapports d’amplitudes aux modes propres du système.
Donner les solutions générales.
En déduire la matrice de passage.
Solution:
Partie A :
Le Lagrangien du système :
Le système a un seul degré de liberté exprimé en θ
Pour l’énergie cinétique :
2O/c J
2
1E

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 235
avec
2G/O/ )
2
l(MJJ
Pour l’énergie potentielle on a :
21p )l(k
2
1E
Le Lagrangien s’écrit sous la forme suivante :
221
2O/ )l(k
2
1J
2
1),(L
L’équation différentielle :
2
llkJM
LL
dt
d 22
1O/frot
D’ou
0J
lk
J2
l
O/
21
O/
2
Alors :
GG J
lk
J
lavec
/
2
1
2
0
/
22
022
202
La solution générale :
La résolution de cette équation différentielle est de la forme :
22
0
20 sin)cos()(
avectetAet tt
Elle est représentée dans la figure 31.5 comme suit:
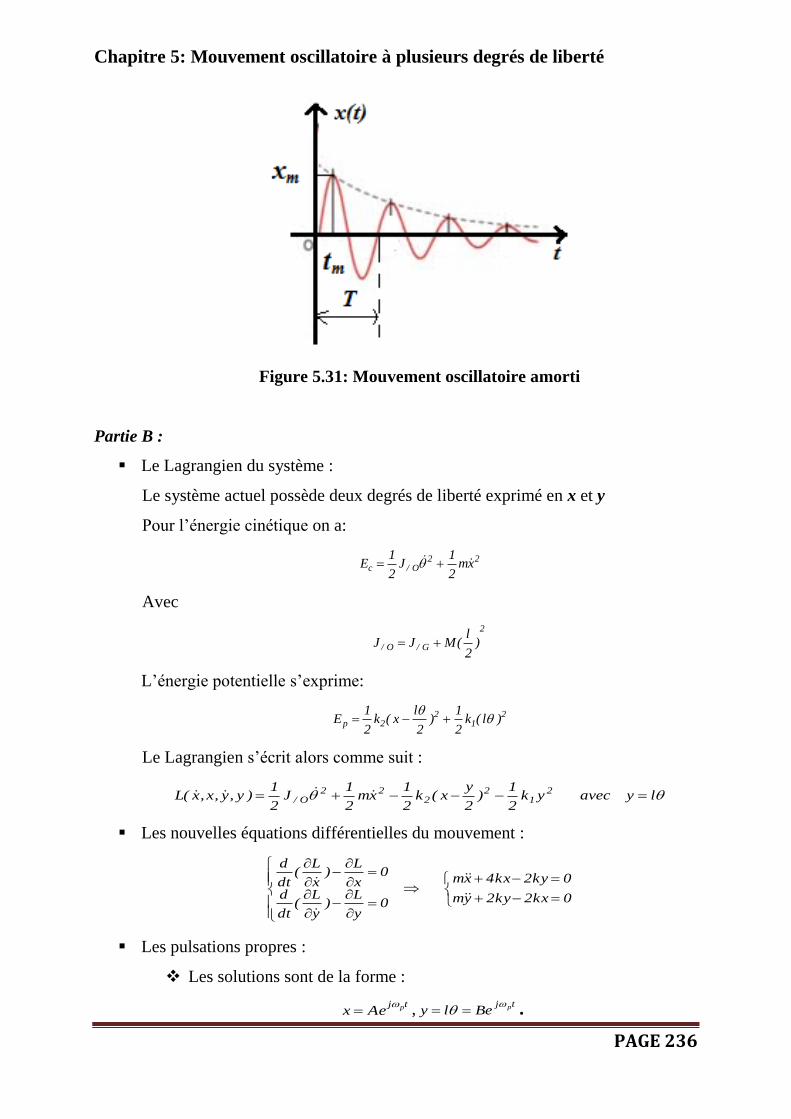
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 236
Figure 5.31: Mouvement oscillatoire amorti
Partie B :
Le Lagrangien du système :
Le système actuel possède deux degrés de liberté exprimé en x et y
Pour l’énergie cinétique on a:
22O/c xm
2
1J
2
1E
Avec
2
G/O/ )2
l(MJJ
L’énergie potentielle s’exprime:
21
22p )l(k
2
1)
2
lx(k
2
1E
Le Lagrangien s’écrit alors comme suit :
lyavecyk2
1)
2
yx(k
2
1xm
2
1J
2
1)y,y,x,x(L 2
12
222
O/
Les nouvelles équations différentielles du mouvement :
0kx2ky2ym
0ky2kx4xm
0y
L)
y
L(
dt
d
0x
L)
x
L(
dt
d
Les pulsations propres :
Les solutions sont de la forme :
tj pAex
, tj pBely
.

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 237
En remplaçant les solutions dans le système différentiel, On obtient un
système linéaire symétrique suivant :
lyavec
0kA2B)k2m(
0kB2A)k4m(2p
2p
Le système admet des solutions non nulles si seulement si :
0det
avec
0)k2()k2m)(k4m( 22p
2p
d’où
0mk5'avec0k4m6m 22224p
2
Donc, il existe deux pulsations propres:
)53(m
k
)53(m
k
2p2
2p1
Les raports d’amplitude aux modes propres sont :
51
2
B
A)53(
m
k
51
2
B
A)53(
m
k
p2
p1
2p2
2p1
Les solutions sont données comme suit:
tcos2
51Btcos
2
51A)t(x
tcosBtcosA)t(x
p2p1
p2p1
La Matrice de passage est :
2
51
2
51
11
P
Problème 10 :
Dans le montage représenté dans la figure 5.32, le pendule de longueur l= OA et de
masse m est couplé par l’intermédiaire du ressort horizontal, de raideur k1, au système
oscillant constitué d’une masse m et du ressort de raideur k2 dont l’extrémité O’ est
fixée. L’extrémité O du pendule est fixée.
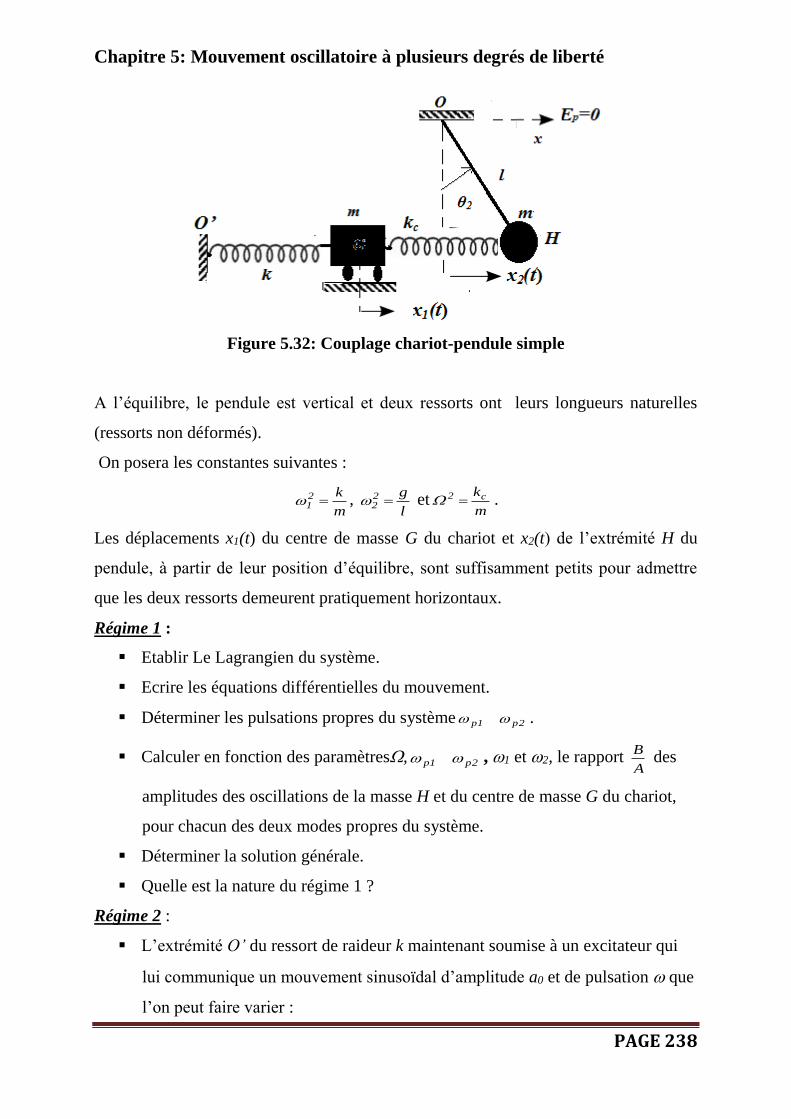
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 238
Figure 5.32: Couplage chariot-pendule simple
A l’équilibre, le pendule est vertical et deux ressorts ont leurs longueurs naturelles
(ressorts non déformés).
On posera les constantes suivantes :
m
k21 ,
l
g22 et
m
kc2 .
Les déplacements x1(t) du centre de masse G du chariot et x2(t) de l’extrémité H du
pendule, à partir de leur position d’équilibre, sont suffisamment petits pour admettre
que les deux ressorts demeurent pratiquement horizontaux.
Régime 1 :
Etablir Le Lagrangien du système.
Ecrire les équations différentielles du mouvement.
Déterminer les pulsations propres du système 2p1p .
Calculer en fonction des paramètres, 2p1p , 1 et 2, le rapport A
B des
amplitudes des oscillations de la masse H et du centre de masse G du chariot,
pour chacun des deux modes propres du système.
Déterminer la solution générale.
Quelle est la nature du régime 1 ?
Régime 2 :
L’extrémité O’ du ressort de raideur k maintenant soumise à un excitateur qui
lui communique un mouvement sinusoïdal d’amplitude a0 et de pulsation que
l’on peut faire varier :
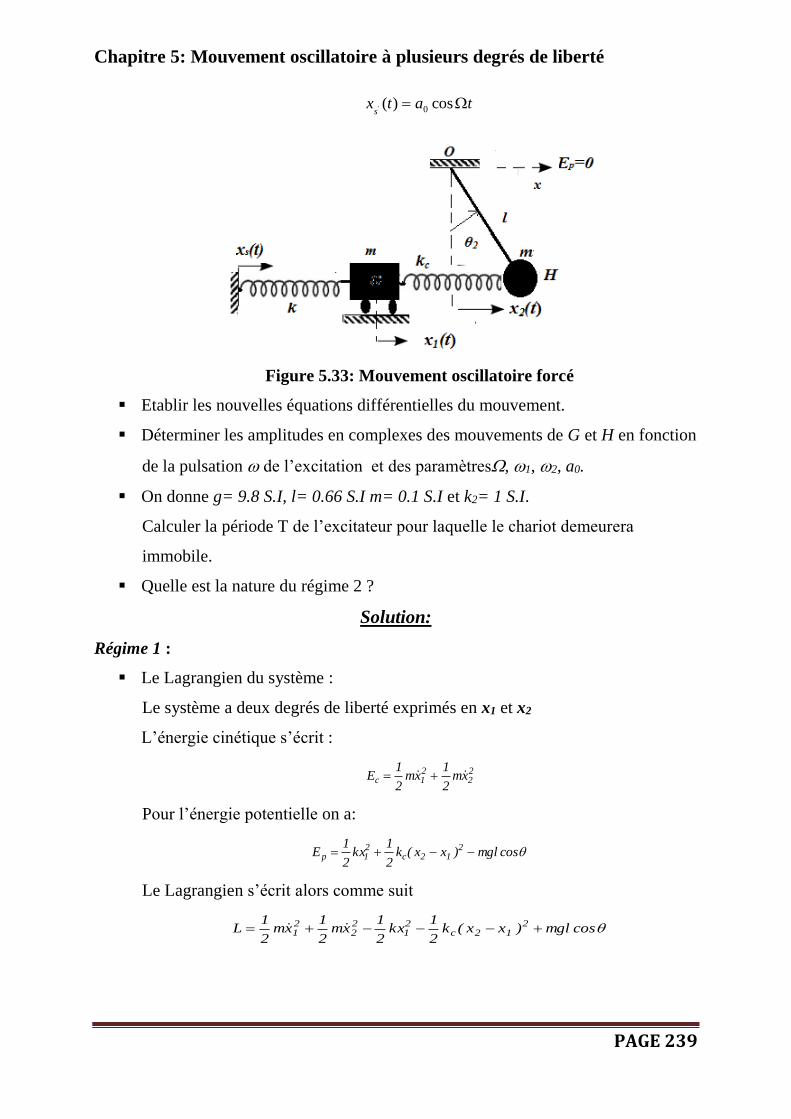
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 239
tatxs
cos)( 0'
Figure 5.33: Mouvement oscillatoire forcé
Etablir les nouvelles équations différentielles du mouvement.
Déterminer les amplitudes en complexes des mouvements de G et H en fonction
de la pulsation de l’excitation et des paramètres, 1, 2, a0.
On donne g= 9.8 S.I, l= 0.66 S.I m= 0.1 S.I et k2= 1 S.I.
Calculer la période T de l’excitateur pour laquelle le chariot demeurera
immobile.
Quelle est la nature du régime 2 ?
Solution:
Régime 1 :
Le Lagrangien du système :
Le système a deux degrés de liberté exprimés en x1 et x2
L’énergie cinétique s’écrit :
22
21c xm
2
1xm
2
1E
Pour l’énergie potentielle on a:
cosmgl)xx(k2
1kx
2
1E 2
12c21p
Le Lagrangien s’écrit alors comme suit
cosmgl)xx(k2
1kx
2
1xm
2
1xm
2
1L 2
12c21
22
21
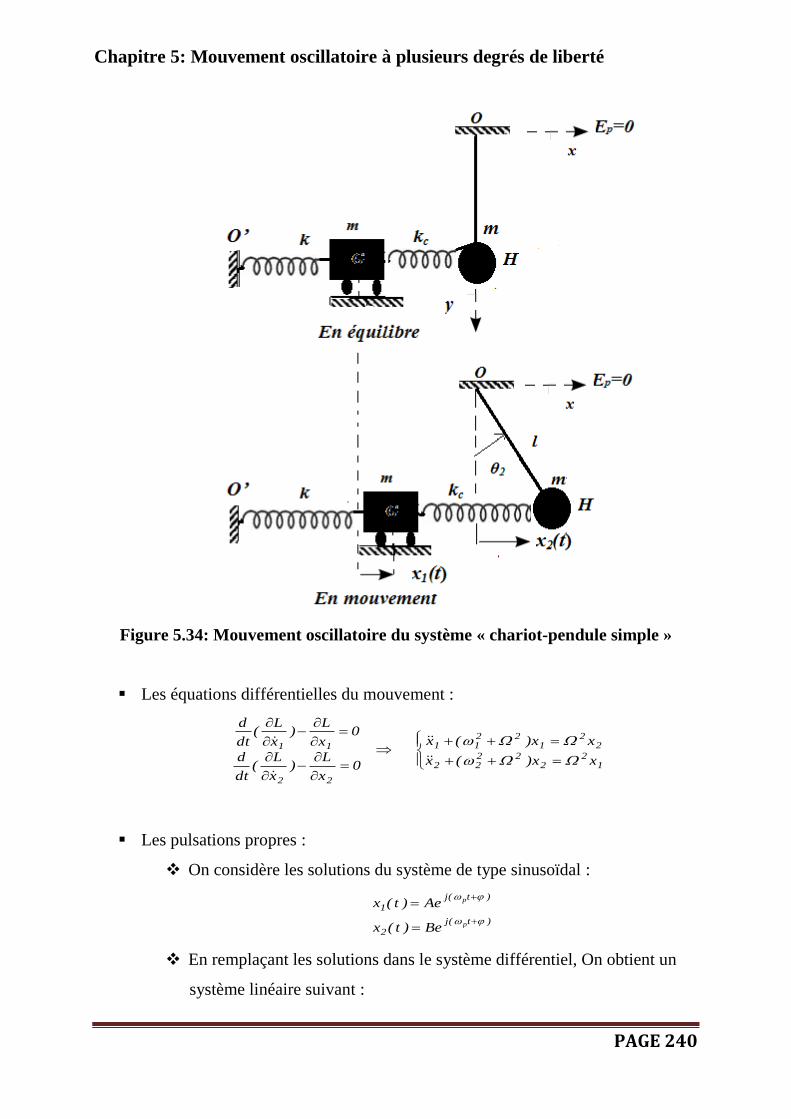
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 240
Figure 5.34: Mouvement oscillatoire du système « chariot-pendule simple »
Les équations différentielles du mouvement :
12
222
22
22
122
11
22
11
xx)(x
xx)(x
0x
L)
x
L(
dt
d
0x
L)
x
L(
dt
d
Les pulsations propres :
On considère les solutions du système de type sinusoïdal :
)t(j
2
)t(j
1
p
p
Be)t(x
Ae)t(x
En remplaçant les solutions dans le système différentiel, On obtient un
système linéaire suivant :

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 241
0B)(A
0BA)(22
22p
2
2221
2p
Le système admet des solutions non nulles si seulement si :
0)()2(0det 22
21
22
21
22p
22
21
24p
Les pulsations propres sont :
))((4)2(2
1
2
2
))((4)2(2
1
2
2
22
21
22
21
2222
21
222
21
22
p2
22
21
22
21
2222
21
222
21
22p1
Le rapport des amplitudes des oscillations A
Bs’écrit :
p2p2
222
2p2
2
2
p1p2
221
2p1
1
1
A
B
A
B
La solution générale :
)tcos(B)tcos(B)t(x
)tcos(A)tcos(A)t(x
p22p112
p22p111
La nature du mouvement : le système a un mouvement libre couplé à deux
degrés de libertés.
Régime 2 :
Les nouvelles équations différentielles du mouvement :
Le Lagrangien du système :
cosmgl)xx(k2
1)xx(k
2
1xm
2
1xm
2
1L 2
12c2
'o122
21
Le système différentiel :
0xx)(x
tcosaxx)(x
0x
L)
x
L(
dt
d
0x
L)
x
L(
dt
d
12
222
22
0212
21
2211
22
11
Les amplitudes en complexes des mouvements de G et H :
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 242
Les solutions particulières sont de type :
)t(jp22
)t(jp11
Be)t(x)t(x
Ae)t(x)t(x
En remplaçant les solutions dans le système différentiel, On obtient :
tjtj
222
22
210
2221
2
eBB~
AeA~
Avec
0B~
)(A~
aB~
A~
)(
Alors :
4222
2221
2
221j
4222
2221
2
222
221j
))((BeB
~
))((
)(AeA
~
2
1
La période T de l’excitateur pour laquelle le chariot demeurera immobile :
s26.12
T22
2
Problème 11 :
On considère une échelle de perroquet constituée d’une chaine linéaire de pendules
simples. Chaque élément est formé d’un pendule simple de longueur l et de masse m ;
ci-dessous la figure 5.35 attachés à une tige ayant un module de torsion C. Les deux
pendules des extrémités sont montés à la même tige de raideur C sur un bâti rigide.
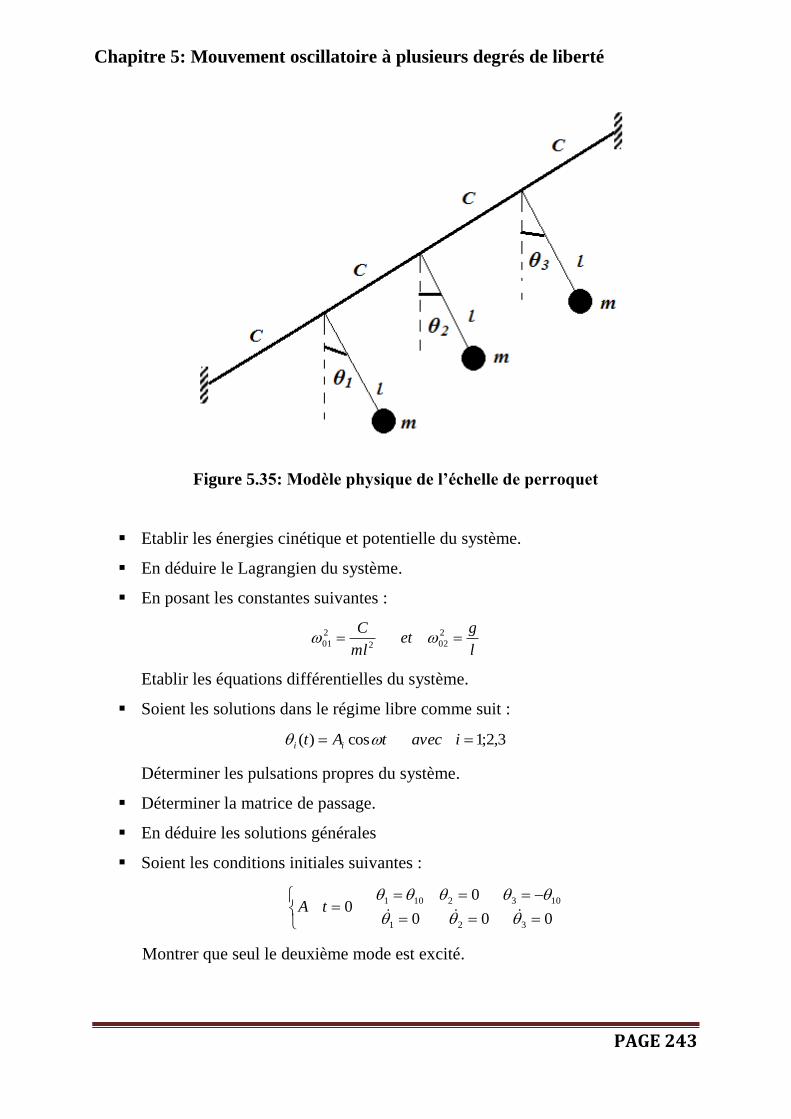
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 243
Figure 5.35: Modèle physique de l’échelle de perroquet
Etablir les énergies cinétique et potentielle du système.
En déduire le Lagrangien du système.
En posant les constantes suivantes :
l
get
ml
C 2
022
2
01
Etablir les équations différentielles du système.
Soient les solutions dans le régime libre comme suit :
3,2;1cos)( iavectAt ii
Déterminer les pulsations propres du système.
Déterminer la matrice de passage.
En déduire les solutions générales
Soient les conditions initiales suivantes :
000
00
321
1032101
tA
Montrer que seul le deuxième mode est excité.

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 244
Solution:
L’énergie cinétique du système s’écrit comme suit :
2
3
22
2
22
1
2
2
1
2
1
2
1 mlmlmlEc
Pour l’énergie potentielle on a :
)coscos(cos2
1
2
1)(
2
1)(
2
1321
2
3
2
1
2
32
2
21 mlCCCCE p
Donc le lagrangien s’écrit comme suit :
)coscos(cos2
1
2
1)(
2
1)(
2
1
2
1
2
1
2
1
321
2
3
2
1
2
32
2
21
2
3
22
2
22
1
2
mlCCCC
mlmlml
EEL pc
Les équations différentielles du mouvement :
0sin)2(
0sin)()(
0sin)2(
0
0
0
3233
2
123212
2
1211
2
33
22
11
mglCml
mglCCml
mglCml
LL
dt
d
LL
dt
d
LL
dt
d
Après linéarisation du système différentielles en posant sin pour les petites
oscillations et en remplaçant les constantes l
get
ml
C 2
022
2
01 ; on trouve :
0)2(
0)2(
0)2(
3
2
0223
2
013
2
2
02312
2
012
1
2
0221
2
011
On a un système différentiel linéaire homogène, qui a admet des solutions
harmoniques de la forme suivantes :
3,2;1cos)( iavectAt ii
D’où :
3,2;1)( 2 iavect ii

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 245
Après calcul on obtient alors le système linéaire suivant :
0)2(
0)2(
0)2(
2
2
013
22
02
2
01
3
2
012
22
02
2
01
2
01
2
2
011
22
02
2
01
AA
AAA
AA
On peut l’écrire sous la forme matricielle :
0
0
0
20
2
02
3
2
1
22
02
2
01
2
01
2
01
22
02
2
01
2
01
2
01
22
02
2
01
A
A
A
Pour que ce système linéaire admet des solutions non nulles il faut que :
0det
Ainsi ; on obtient:
0202
2)2(
22
02
2
01
2
01
2
012
0122
02
2
01
2
01
2
01
22
02
2
0122
02
2
01
D’où :
0)2()2()2( 22
02
2
01
4
01
4
01
222
02
2
01
22
02
2
01
Finalement après calcul on aura les trois modes propres du mouvement comme
suit :
2
02
2
013
2
02
2
012
2
02
2
011
)22(
)22(
2
p
p
p
En appliquant les conditions initiales ; on obtient :
0cos
0cos
0coscos
0coscos
33
11
3311
3311
A
A
AA
AA
De plus on a :
0sin
0sin
0sinsin
0sinsin
33
11
3311
3311
A
A
AA
AA
D’où :
00 31 AetA
On a de plus :
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 246
0sincos 232210 AetA
Avec :
1022 0 Aet
Finalement on a:
)(cos)(
0)(
cos)(
1103
2
101
ttt
t
tt
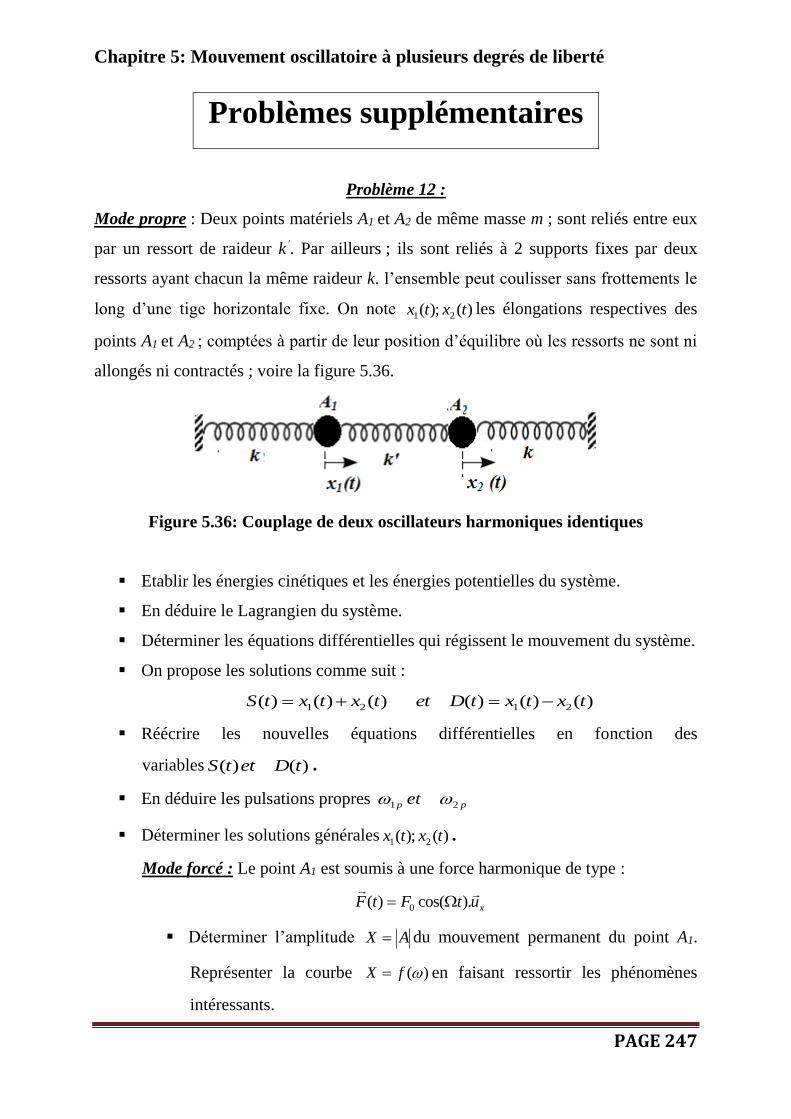
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 247
Problèmes supplémentaires
Problème 12 :
Mode propre : Deux points matériels A1 et A2 de même masse m ; sont reliés entre eux
par un ressort de raideur k’. Par ailleurs ; ils sont reliés à 2 supports fixes par deux
ressorts ayant chacun la même raideur k. l’ensemble peut coulisser sans frottements le
long d’une tige horizontale fixe. On note )();( 21 txtx les élongations respectives des
points A1 et A2 ; comptées à partir de leur position d’équilibre où les ressorts ne sont ni
allongés ni contractés ; voire la figure 5.36.
Figure 5.36: Couplage de deux oscillateurs harmoniques identiques
Etablir les énergies cinétiques et les énergies potentielles du système.
En déduire le Lagrangien du système.
Déterminer les équations différentielles qui régissent le mouvement du système.
On propose les solutions comme suit :
)()()()()()( 2121 txtxtDettxtxtS
Réécrire les nouvelles équations différentielles en fonction des
variables )()( tDettS .
En déduire les pulsations propres pp et 21
Déterminer les solutions générales )();( 21 txtx .
Mode forcé : Le point A1 est soumis à une force harmonique de type :
xutFtF
).cos()( 0
Déterminer l’amplitude AX du mouvement permanent du point A1.
Représenter la courbe )(fX en faisant ressortir les phénomènes
intéressants.
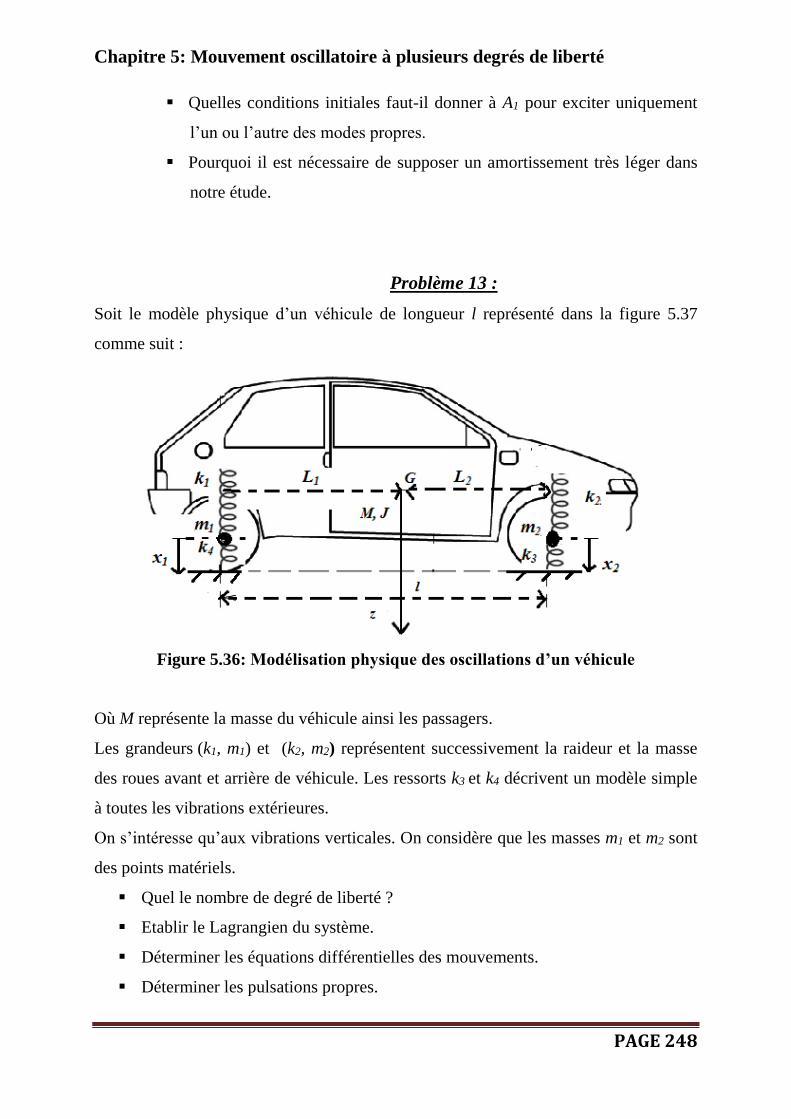
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 248
Quelles conditions initiales faut-il donner à A1 pour exciter uniquement
l’un ou l’autre des modes propres.
Pourquoi il est nécessaire de supposer un amortissement très léger dans
notre étude.
Problème 13 :
Soit le modèle physique d’un véhicule de longueur l représenté dans la figure 5.37
comme suit :
Figure 5.36: Modélisation physique des oscillations d’un véhicule
Où M représente la masse du véhicule ainsi les passagers.
Les grandeurs (k1, m1) et (k2, m2) représentent successivement la raideur et la masse
des roues avant et arrière de véhicule. Les ressorts k3 et k4 décrivent un modèle simple
à toutes les vibrations extérieures.
On s’intéresse qu’aux vibrations verticales. On considère que les masses m1 et m2 sont
des points matériels.
Quel le nombre de degré de liberté ?
Etablir le Lagrangien du système.
Déterminer les équations différentielles des mouvements.
Déterminer les pulsations propres.
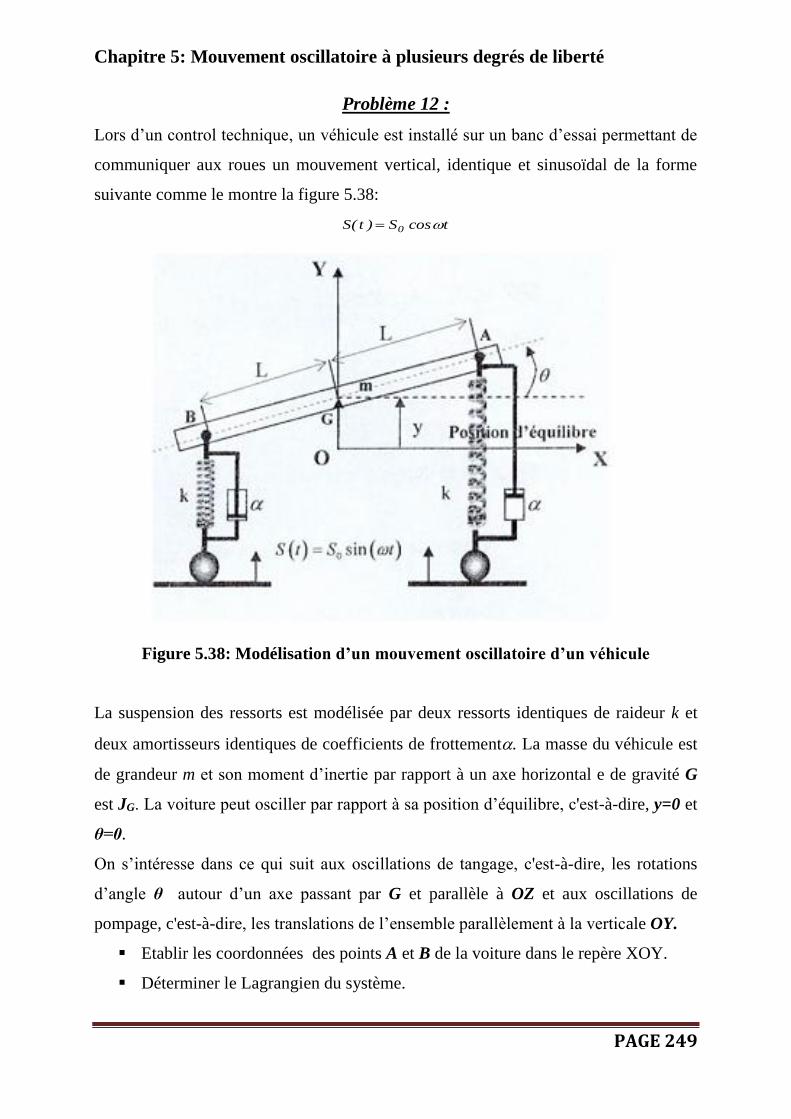
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 249
Problème 12 :
Lors d’un control technique, un véhicule est installé sur un banc d’essai permettant de
communiquer aux roues un mouvement vertical, identique et sinusoïdal de la forme
suivante comme le montre la figure 5.38:
tcosS)t(S 0
Figure 5.38: Modélisation d’un mouvement oscillatoire d’un véhicule
La suspension des ressorts est modélisée par deux ressorts identiques de raideur k et
deux amortisseurs identiques de coefficients de frottement. La masse du véhicule est
de grandeur m et son moment d’inertie par rapport à un axe horizontal e de gravité G
est JG. La voiture peut osciller par rapport à sa position d’équilibre, c'est-à-dire, y=0 et
θ=0.
On s’intéresse dans ce qui suit aux oscillations de tangage, c'est-à-dire, les rotations
d’angle θ autour d’un axe passant par G et parallèle à OZ et aux oscillations de
pompage, c'est-à-dire, les translations de l’ensemble parallèlement à la verticale OY.
Etablir les coordonnées des points A et B de la voiture dans le repère XOY.
Déterminer le Lagrangien du système.

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 250
Exprimer les équations différentielles du système.
Déterminer les solutions totales du mouvement y(t) et θ(t).
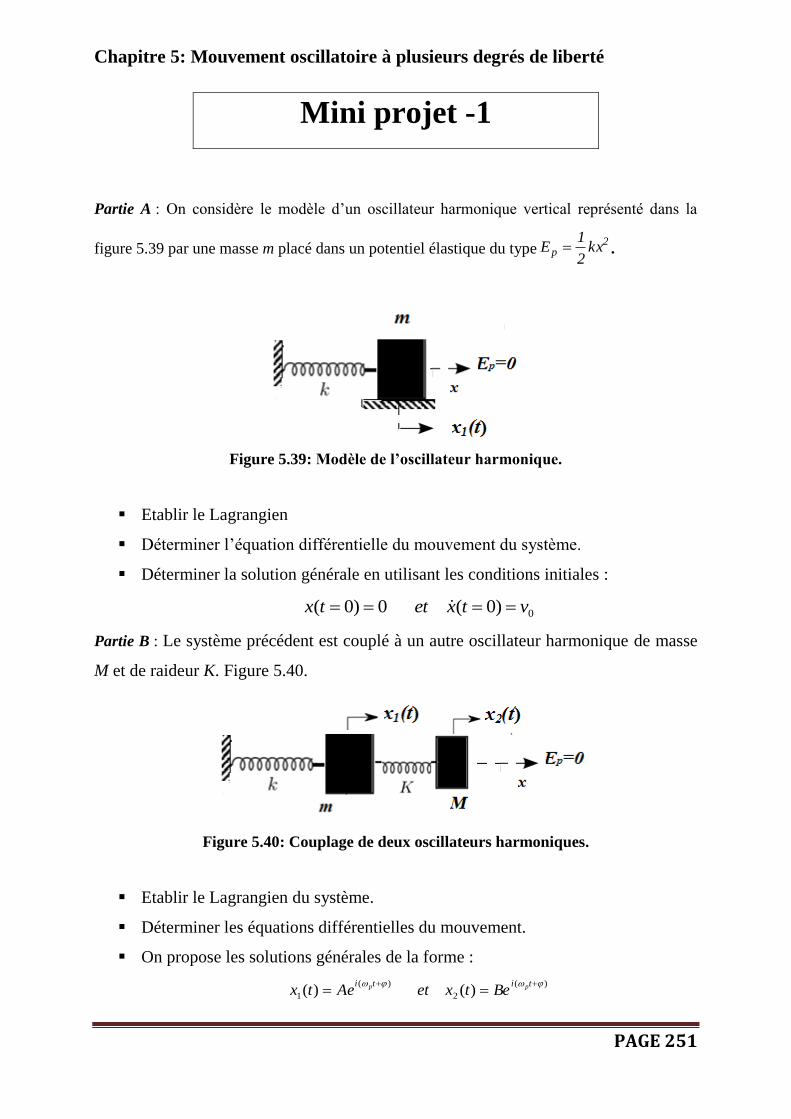
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 251
Mini projet -1
Partie A : On considère le modèle d’un oscillateur harmonique vertical représenté dans la
figure 5.39 par une masse m placé dans un potentiel élastique du type2
p kx2
1E .
Figure 5.39: Modèle de l’oscillateur harmonique.
Etablir le Lagrangien
Déterminer l’équation différentielle du mouvement du système.
Déterminer la solution générale en utilisant les conditions initiales :
0)0(0)0( vtxettx
Partie B : Le système précédent est couplé à un autre oscillateur harmonique de masse
M et de raideur K. Figure 5.40.
Figure 5.40: Couplage de deux oscillateurs harmoniques.
Etablir le Lagrangien du système.
Déterminer les équations différentielles du mouvement.
On propose les solutions générales de la forme :
)(
2
)(
1 )()(
titi pp BetxetAetx
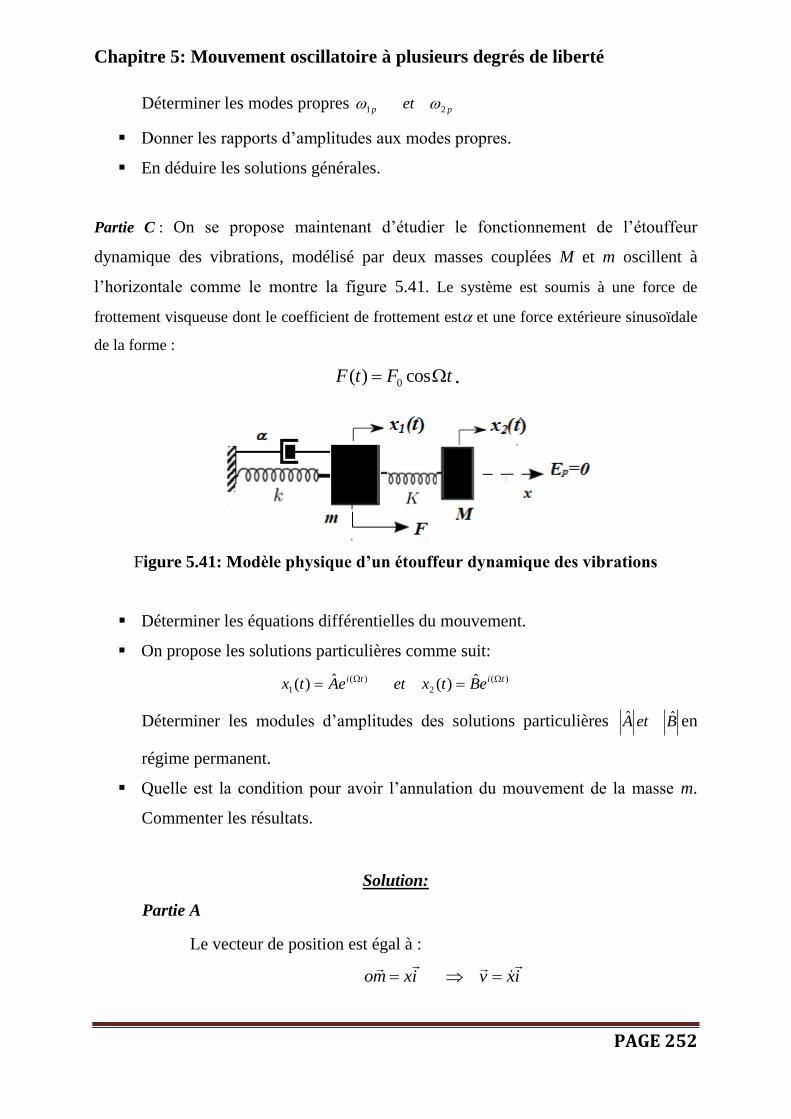
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 252
Déterminer les modes propres pp et 21
Donner les rapports d’amplitudes aux modes propres.
En déduire les solutions générales.
Partie C : On se propose maintenant d’étudier le fonctionnement de l’étouffeur
dynamique des vibrations, modélisé par deux masses couplées M et m oscillent à
l’horizontale comme le montre la figure 5.41. Le système est soumis à une force de
frottement visqueuse dont le coefficient de frottement est et une force extérieure sinusoïdale
de la forme :
tFtF cos)( 0 .
Figure 5.41: Modèle physique d’un étouffeur dynamique des vibrations
Déterminer les équations différentielles du mouvement.
On propose les solutions particulières comme suit:
)(
2
)(
1ˆ)(ˆ)( titi eBtxeteAtx
Déterminer les modules d’amplitudes des solutions particulières BetA ˆˆ en
régime permanent.
Quelle est la condition pour avoir l’annulation du mouvement de la masse m.
Commenter les résultats.
Solution:
Partie A
Le vecteur de position est égal à :
ixvixmo

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 253
L’énergie cinétique s’écrit :
22c xm
2
1mv
2
1E
L’énergie potentielle pour des petites oscillations, s’écrit sous la forme:
2p kx
2
1E
Alors, le Lagrangien du système est de la forme:
22
2
1
2
1kxxmEEL pc
L’équation de mouvement est de la forme :
kxx
Lxm
x
L0
x
L)
x
L(
dt
d
D’ou
0xxm0kxxm 20
La pulsation propre est égale à :
m
k20
La solution de l’équation différentielle s’écrit alors :
)cos()( 0 tAtx
En appliquant les conditions initiales :
20cos0x,0t
2avec
vAvx,0t 0
0
La solution finale sera exprimée comme suit :
tv
txtAtx
sin)()cos()( 0
Le Lagrangien du système :
L’énergie cinétique du système s’écrit :
)(2
1)(
2
1 2
2
2
1 txMtxmEc
L’énergie potentielle du système s’exprime par rapport à l’état d’équilibre:

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 254
2
21
2
1 )(2
1
2
1xxKkxE p
Le Lagrangien s’écrit alors :
2
21
2
1
2
2
2
1 )(2
1
2
1)(
2
1)(
2
1xxKkxtxMtxmEEL pc
Les équations différentielles du mouvement :
0
0)(
0)(
0)(
122
211
22
11
KxKxxM
KxxKkxm
x
L
x
L
dt
d
x
L
x
L
dt
d
On propose les solutions générales :
)(
2
)(
1 )()(
titi pp BetxetAetx
En remplaçant dans le système différentiel, on obtient un système linéaire
comme suit:
0
0)(2
2
BKMKA
KBAKkm
p
p
Le système admet des solutions non nulles si seulement si :
0det
D’où
0)))((( 222 KKMkKm pp
On obtient alors :
0)(24
mM
Kk
m
kK
M
Kpp
En résolvant l’équation ; on obtient les modes propres comme suit :
mM
kK
m
kK
M
K
m
kK
M
K
mM
kK
m
kK
M
K
m
kK
M
K
p
p
4)(2
1
22
4)(2
1
22
22
2
22
1
Les rapports d’amplitudes aux modes propres :
Kkm
K
B
A
Kkm
K
B
A
p
p
pp
pp
2
22
2
2
11
1
2
1

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 255
Les solutions générales s’écrivent alors :
)tcos(B)tcos(B)t(x
)tcos(A)tcos(A)t(x
p22p112
p22p111
Partie c
Les nouvelles équations différentielles du mouvement :
0
)()(
0)(
)(
122
1211
22
11
KxKxxM
xtFKxxKkxm
x
L
x
L
dt
d
Fx
L
x
L
dt
d
i
ext
D’où
0
cos)(
122
02111
KxKxxM
tFKxxKkxxm
En régime permanent, En remplaçant la forme des solutions particulières dans
le système différentiel on obtient alors le système linéaire comme suit :
0ˆˆ
ˆ)(2
0
2
BKMAK
FKBAiKkm
p
p
Les modules d’amplitudes des solutions particulières s’écrivent alors comme
suit :
)()(
ˆ
)()(
ˆ
224
0
224
2
0
M
K
mi
m
k
M
K
M
K
m
KkM
K
m
F
B
M
K
mi
m
k
M
K
M
K
m
KkM
K
m
FA
La masse m est immobile lorsque la pulsation de la force extérieure est égale à :
M
Ka
2
D’où l’amplitude A est nulle dans ce cas. Dans ces conditions, un tel dispositif
est appelé un étouffeur dynamique de vibrations.
La figure illustre les phénomènes de résonance et antirésonance.
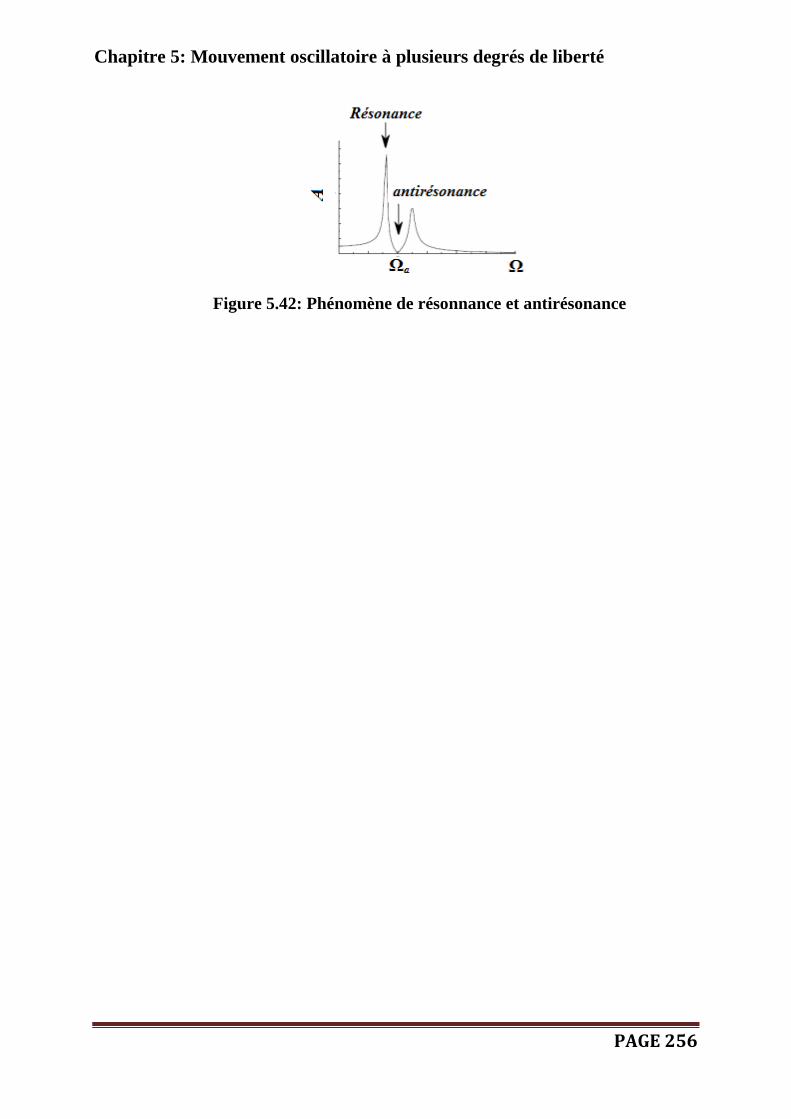
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 256
Figure 5.42: Phénomène de résonnance et antirésonance

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 257
Mini projet -2
Partie A :
Deux particules m1 et m2 ponctuelles, de masses respectives m1 et m2, sont reliées par
un ressort de raideur k et de longueur à vide l0, la figure 5.43. Les deux masses,
mobiles sans frottement sur une tige horizontale, sont écartées de leur position
d’équilibre puis relâchées sans vitesse ; elles sont repérées à chaque instant t par les
abscisses x1(t)=GM1 et x2(t)=GM2, où G désigne le centre de masse des particules m1
et m2.
Figure 5.43: Modélisation physique des oscillations d’une molécule diatomique
Etablir le Lagrangien du système.
On pose la variable suivante :
X(t)=x2(t)–x1(t)
Déterminer l’équation différentielle du second ordre dont X(t) est la solution du
système.
Exprimer, en fonction de m1, m2 et k, la période T avec laquelle les masses
oscillent l’une par rapport à l’autre.
On suppose que deux masses couplées égales m1=m2=m=0.1kg oscillent avec
une période de 1s.
Calculer la raideur k du ressort de couplage.
Le système étudié modélise les vibrations longitudinales d’une molécule
diatomique d’oxyde de carbone CO dont la fréquence propre f0 est
f0=6.51013Hz.
Calculer la constante de rappelle k de la liaison carbone–oxygène.
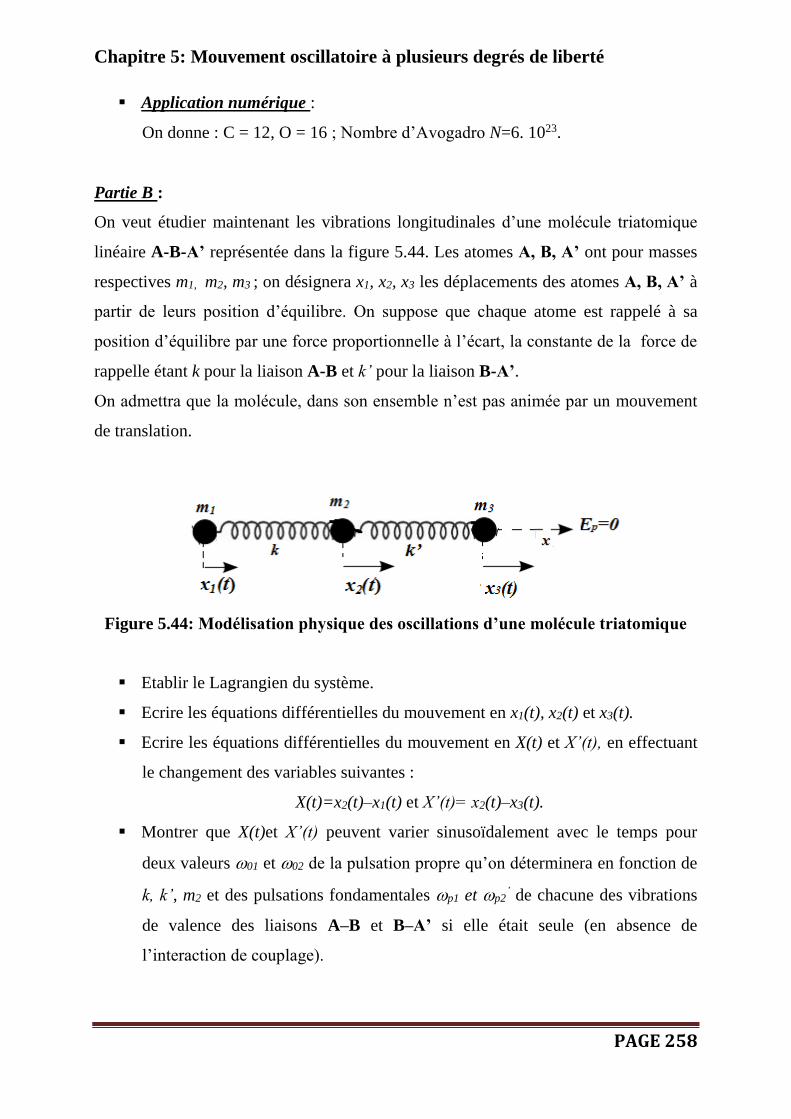
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 258
Application numérique :
On donne : C = 12, O = 16 ; Nombre d’Avogadro N=6. 1023.
Partie B :
On veut étudier maintenant les vibrations longitudinales d’une molécule triatomique
linéaire A-B-A’ représentée dans la figure 5.44. Les atomes A, B, A’ ont pour masses
respectives m1, m2, m3 ; on désignera x1, x2, x3 les déplacements des atomes A, B, A’ à
partir de leurs position d’équilibre. On suppose que chaque atome est rappelé à sa
position d’équilibre par une force proportionnelle à l’écart, la constante de la force de
rappelle étant k pour la liaison A-B et k’ pour la liaison B-A’.
On admettra que la molécule, dans son ensemble n’est pas animée par un mouvement
de translation.
Figure 5.44: Modélisation physique des oscillations d’une molécule triatomique
Etablir le Lagrangien du système.
Ecrire les équations différentielles du mouvement en x1(t), x2(t) et x3(t).
Ecrire les équations différentielles du mouvement en X(t) et X’(t), en effectuant
le changement des variables suivantes :
X(t)=x2(t)–x1(t) et X’(t)= x2(t)–x3(t).
Montrer que X(t)et X’(t) peuvent varier sinusoïdalement avec le temps pour
deux valeurs 01 et 02 de la pulsation propre qu’on déterminera en fonction de
k, k’, m2 et des pulsations fondamentales p1 et p2’ de chacune des vibrations
de valence des liaisons A–B et B–A’ si elle était seule (en absence de
l’interaction de couplage).
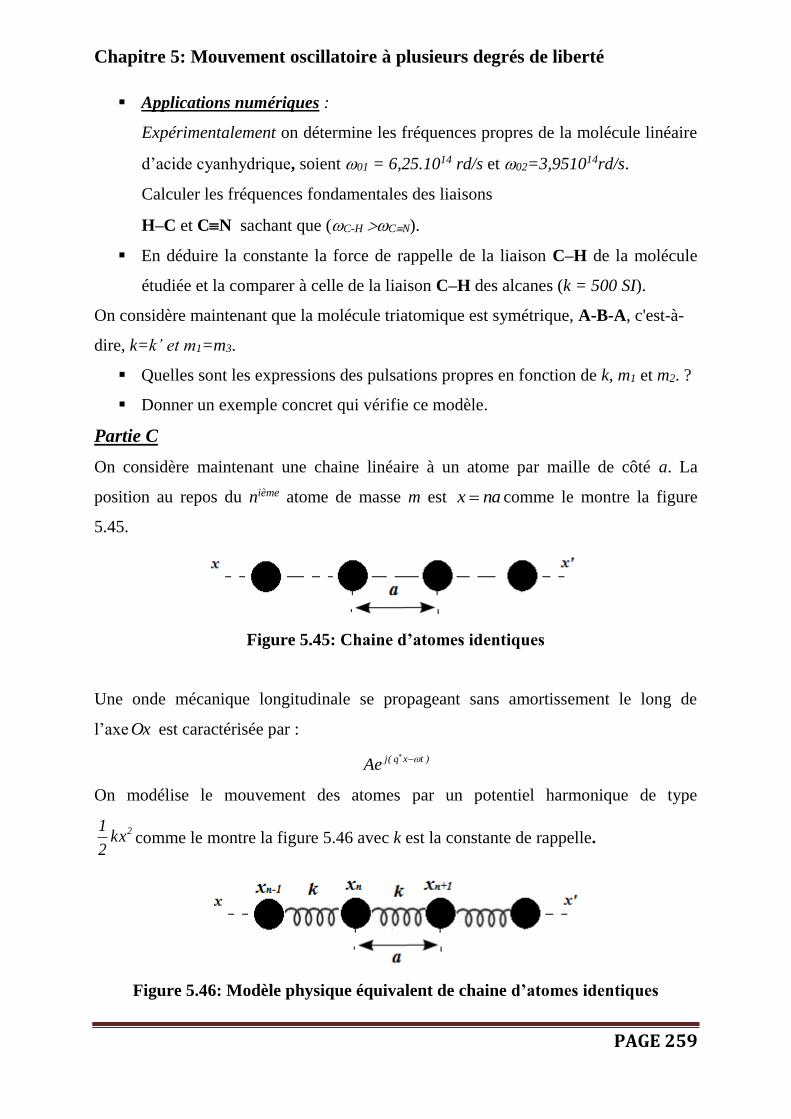
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 259
Applications numériques :
Expérimentalement on détermine les fréquences propres de la molécule linéaire
d’acide cyanhydrique, soient 01 = 6,25.1014 rd/s et 02=3,951014rd/s.
Calculer les fréquences fondamentales des liaisons
H–C et CN sachant que (C-H CN).
En déduire la constante la force de rappelle de la liaison C–H de la molécule
étudiée et la comparer à celle de la liaison C–H des alcanes (k = 500 SI).
On considère maintenant que la molécule triatomique est symétrique, A-B-A, c'est-à-
dire, k=k’ et m1=m3.
Quelles sont les expressions des pulsations propres en fonction de k, m1 et m2. ?
Donner un exemple concret qui vérifie ce modèle.
Partie C
On considère maintenant une chaine linéaire à un atome par maille de côté a. La
position au repos du nième atome de masse m est nax comme le montre la figure
5.45.
Figure 5.45: Chaine d’atomes identiques
Une onde mécanique longitudinale se propageant sans amortissement le long de
l’axe Ox est caractérisée par :
)txq(jAe
On modélise le mouvement des atomes par un potentiel harmonique de type
2kx2
1comme le montre la figure 5.46 avec k est la constante de rappelle.
Figure 5.46: Modèle physique équivalent de chaine d’atomes identiques

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 260
Écrire l’équation du mouvement pour l’atome de rang n, en appelant
11 ,, nnn xxx les déplacements des atomes de rang n-1, n et n+1.
On cherchera la solution de forme :
)( txqj
nnAex
Déterminer la relation de dispersion )q( .
Tracer le graphe )q( .
En déduire la vitesse de la phase.
Donner l’expression de la vitesse du groupe.
Que peut-on dire sur la nature du milieu aux grandes longueurs
d’onde.
Solutions
Partie A :
Le Lagrangien du système s’écrit :
2
21
2
22
2
11 )(2
1
2
1
2
1xxkxmxmLEEL pc
Le système différentiel s’écrit :
0
0
0)(
0)(
1222
2111
22
11
kxkxxm
kxkxxm
x
L
x
L
dt
d
x
L
x
L
dt
d
En utilisant le changement des variables
X(t)=x2(t)–x1(t)
L’équation différentielle s’écrit alors :
0)11
(21
Xmm
kX
D’où :
00)( 2
0
21
21
XXXmm
mmkX
Avec
21
21
mm
mm
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 261
est appelée la masse réduite du système
Le système est régi par une équation différentielle ordinaire du
second d’ordre avec la pulsation propre ω0:
)(21
210
mm
mmk
La solution est de la forme
)cos()( 0 tAtX
D’où la période des oscillations T s’’écrit comme suit :
)(2
2
21
21
0 mmk
mmTT
Pour un système couplé symétrique mmm 21la masse réduite est
égale à :
221
21 m
mm
mm
Donc la période propre d’oscillation est égale à :
k
mT
22
Alors la raideur du ressort de couplage est égale à :
2
22
T
mk
Comme application numérique on a:
1.2 mNk
La fréquence propre associée à la molécule C-O est :
0
0
cf
Comme application numérique on a:
Hzf 13
0 510.6
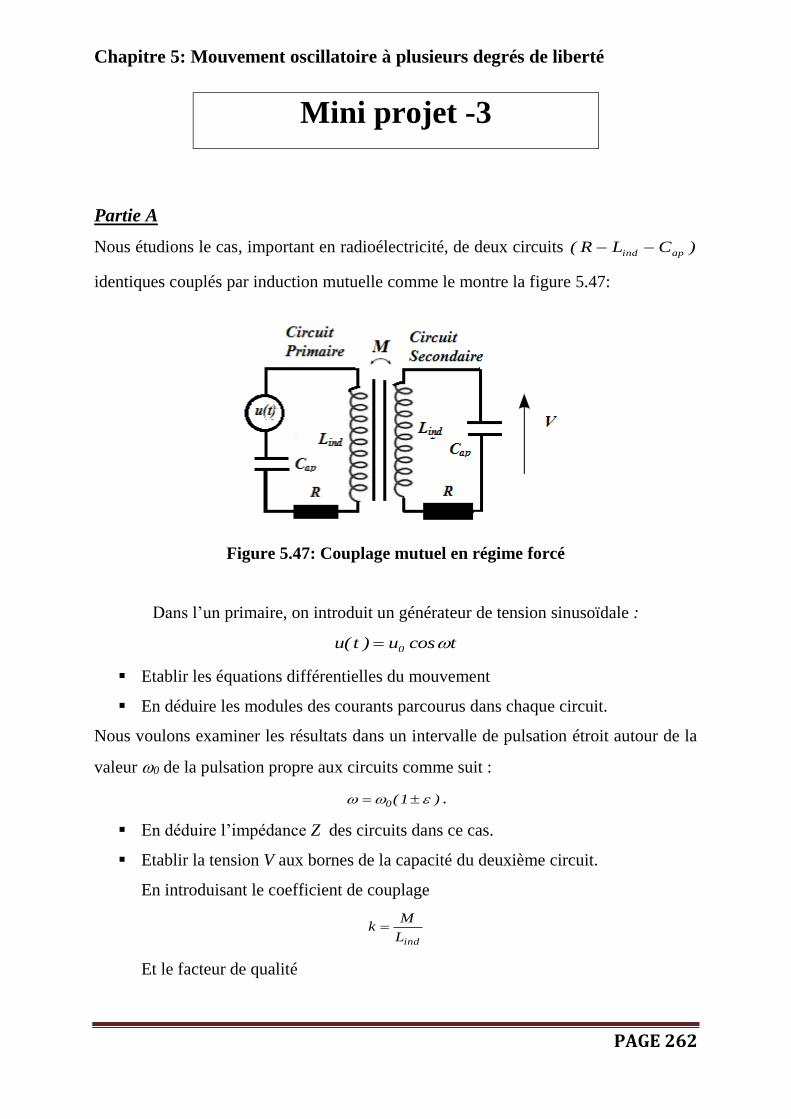
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 262
Mini projet -3
Partie A
Nous étudions le cas, important en radioélectricité, de deux circuits )CLR( apind
identiques couplés par induction mutuelle comme le montre la figure 5.47:
Figure 5.47: Couplage mutuel en régime forcé
Dans l’un primaire, on introduit un générateur de tension sinusoïdale :
tcosu)t(u 0
Etablir les équations différentielles du mouvement
En déduire les modules des courants parcourus dans chaque circuit.
Nous voulons examiner les résultats dans un intervalle de pulsation étroit autour de la
valeur 0 de la pulsation propre aux circuits comme suit :
)1(0 .
En déduire l’impédance Z des circuits dans ce cas.
Etablir la tension V aux bornes de la capacité du deuxième circuit.
En introduisant le coefficient de couplage
indL
Mk
Et le facteur de qualité
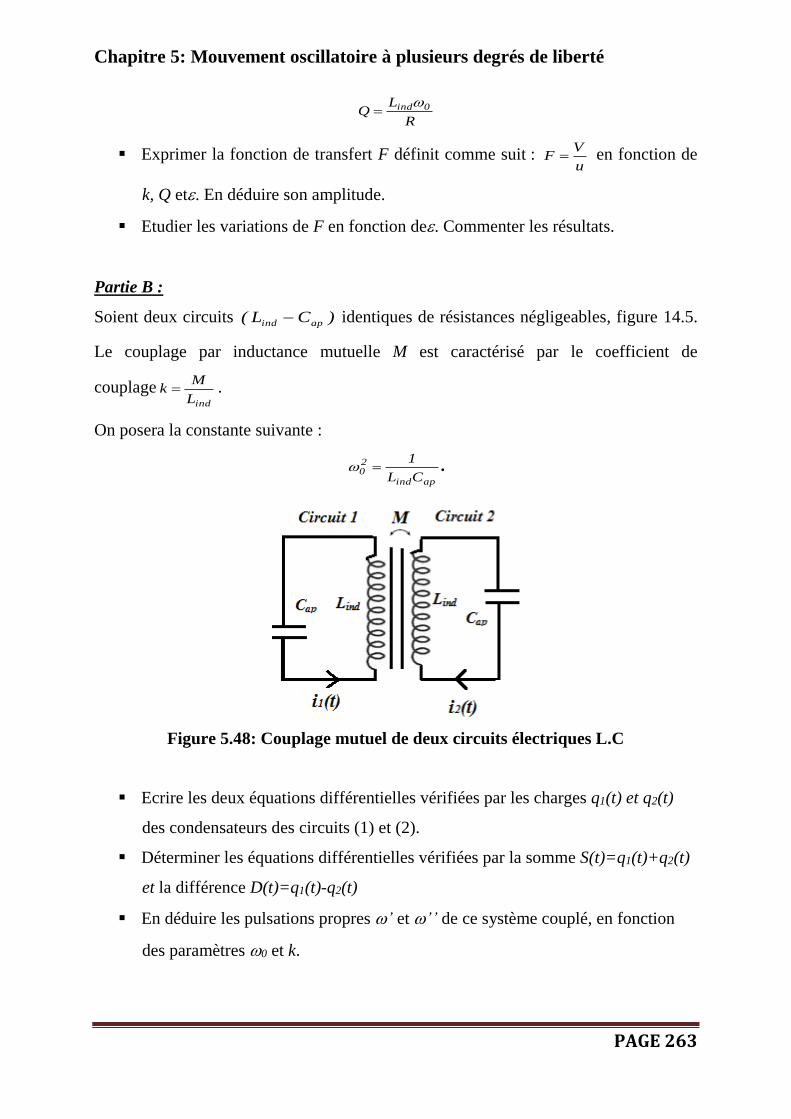
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 263
R
LQ 0ind
Exprimer la fonction de transfert F définit comme suit : u
VF en fonction de
k, Q et. En déduire son amplitude.
Etudier les variations de F en fonction de. Commenter les résultats.
Partie B :
Soient deux circuits )CL( apind identiques de résistances négligeables, figure 14.5.
Le couplage par inductance mutuelle M est caractérisé par le coefficient de
couplageindL
Mk .
On posera la constante suivante :
apind
20
CL
1 .
Figure 5.48: Couplage mutuel de deux circuits électriques L.C
Ecrire les deux équations différentielles vérifiées par les charges q1(t) et q2(t)
des condensateurs des circuits (1) et (2).
Déterminer les équations différentielles vérifiées par la somme S(t)=q1(t)+q2(t)
et la différence D(t)=q1(t)-q2(t)
En déduire les pulsations propres ’ et ’’ de ce système couplé, en fonction
des paramètres 0 et k.
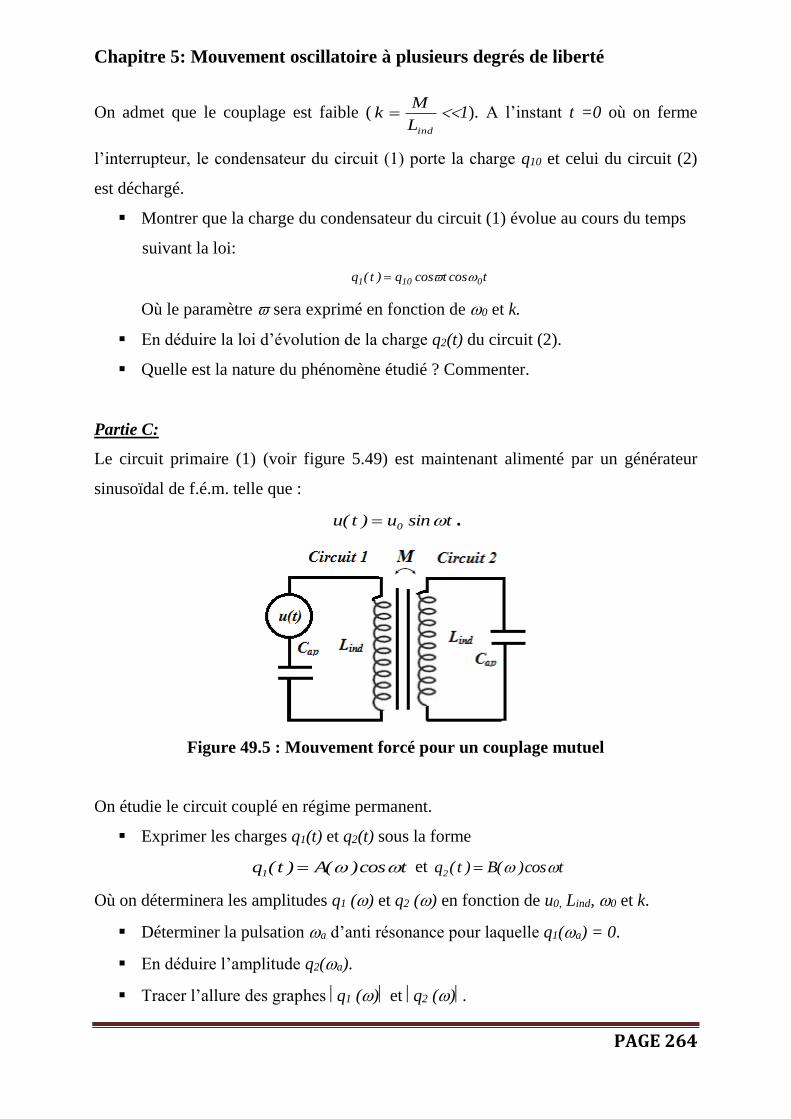
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 264
On admet que le couplage est faible (indL
Mk 1). A l’instant t =0 où on ferme
l’interrupteur, le condensateur du circuit (1) porte la charge q10 et celui du circuit (2)
est déchargé.
Montrer que la charge du condensateur du circuit (1) évolue au cours du temps
suivant la loi:
tcostcosq)t(q 0101
Où le paramètre sera exprimé en fonction de 0 et k.
En déduire la loi d’évolution de la charge q2(t) du circuit (2).
Quelle est la nature du phénomène étudié ? Commenter.
Partie C:
Le circuit primaire (1) (voir figure 5.49) est maintenant alimenté par un générateur
sinusoïdal de f.é.m. telle que :
tsinu)t(u 0 .
Figure 49.5 : Mouvement forcé pour un couplage mutuel
On étudie le circuit couplé en régime permanent.
Exprimer les charges q1(t) et q2(t) sous la forme
tcos)(A)t(q1 et tcos)(B)t(q2
Où on déterminera les amplitudes q1 () et q2 () en fonction de u0, Lind, 0 et k.
Déterminer la pulsation a d’anti résonance pour laquelle q1(a) = 0.
En déduire l’amplitude q2(a).
Tracer l’allure des graphes q1 () et q2 ().

Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 265
Solution :
Le système a deux degrés de liberté exprimés en q1 et q2
Les deux équations différentielles du système s’écrivent :
0dt
diM
dt
diL
C
q2Circuit
0dt
diM
dt
diL
C
q1Circuit
12ind
ap
2
21ind
ap
1
En introduisant le couplage :
indL
Mk
On obtient :
0qkqq2Circuit
0qkqq1Circuit
12202
21201
En posant les nouvelles variables généralisées:
)t(q)t(q)t(D
)t(q)t(q)t(S
21
21
On obtient les nouvelles équations du mouvement représentées comme suit :
0Dk1
D
0Sk1
S
20
20
Les pulsations propres ’ et ’’ sont définies comme suit :
k1et
k1
00
Les lois d’évolution des charges q2(t) et q2(t) :
2
kAvec
tsint2
ksinq)t(q
tcost2
kcosq)t(q
0
00
12
00
11
0
0
La nature du mouvement : Les battements
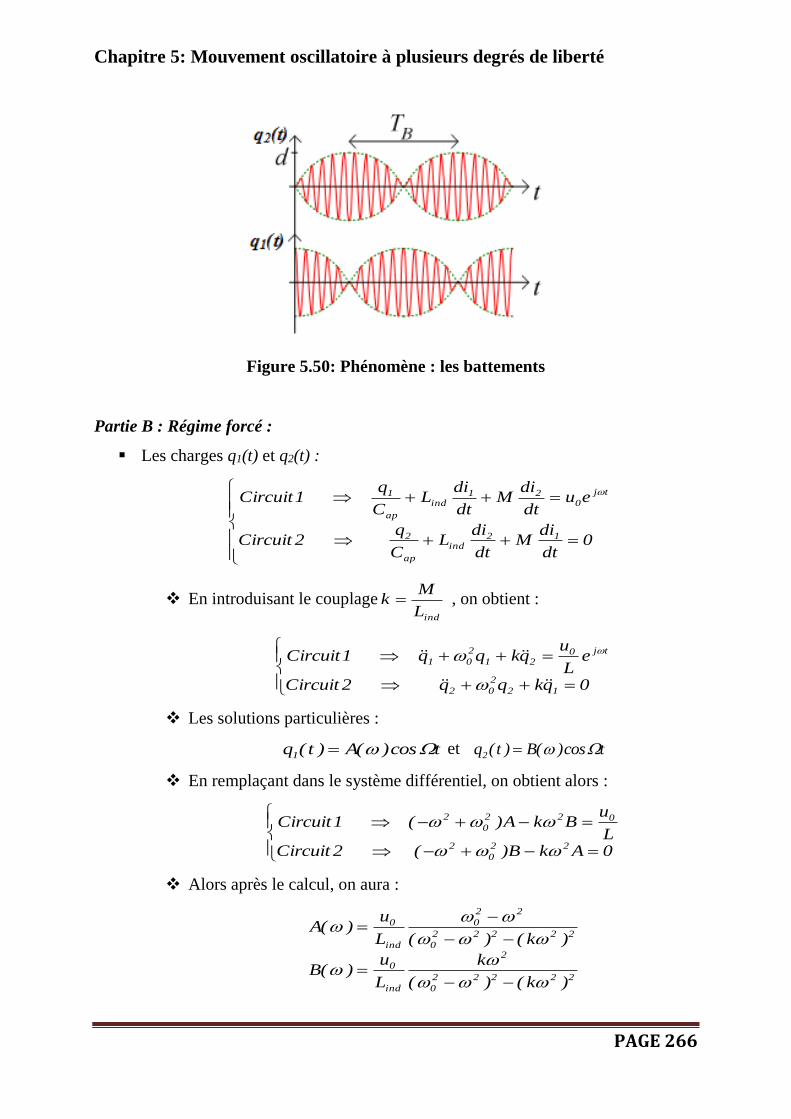
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 266
Figure 5.50: Phénomène : les battements
Partie B : Régime forcé :
Les charges q1(t) et q2(t) :
0dt
diM
dt
diL
C
q2Circuit
eudt
diM
dt
diL
C
q1Circuit
12ind
ap
2
tj
021
ind
ap
1
En introduisant le couplageindL
Mk , on obtient :
0qkqq2Circuit
eL
uqkqq1Circuit
12
2
02
tj021
2
01
Les solutions particulières :
tcos)(A)t(q1 et tcos)(B)t(q2
En remplaçant dans le système différentiel, on obtient alors :
0AkB)(2CircuitL
uBkA)(1Circuit
22
0
2
022
0
2
Alors après le calcul, on aura :
22222
0
2
ind
0
22222
0
22
0
ind
0
)k()(
k
L
u)(B
)k()(L
u)(A
Chapitre 5: Mouvement oscillatoire à plusieurs degrés de liberté
PAGE 267
La pulsation a d’anti résonance :
2
0ind
0A0A
k
1
L
u)(B
REFERENCES
[1] P. DENEVE, « Mécanique », Edition ELLIPSES, ISBN 2-
7298-8751-2, 1987.
[2] M. TAMINE, O. LAMROUS, « Vibrations et Ondes »,
Edition OPU, ISBN 1-02-3698, 1993.
[3] J. KUNTZMANN, «Mathématiques de la physique et de la
technique », Edition HERMANN, ISBN 530, 1963.
[4] G. LANDSBERG, « Vibrations et Ondes, Optique», Edition
MIR MOSCOU, ISBN 5-03-000128-X, 1988.
[5] IAIN G. MAIN, « Vibrations and Waves in physics», Edition
CAMBRIDGE LOW PRICE, ISBN 0-521-49848-1, 1993.
[6] C. GRUBER, W. BENOIT, « Mécanique Générale», Edition
PRESSES POLYTECHNIQUE ET UNIVERSITAIRES
ROMANDES, ISBN 2-88074-305-2, 1998.
[7] R. GABILLARD, « Vibrations et Phénomène de
propagation », Edition DUNOD, 1972.
[8] M. BALKANSKI, C. SEBENE, « Ondes et phénomènes
vibratoires », Edition DUNOD, 1973.
[9] L. LANDAU ET E. LIFCHITZ, « Mécanique», Edition MIR
MOSCOU, 1966.
[10] H. GOLDSTEIN, C. POOLE, and J. SAFKO, « Classical
Mechanics», Edition World Student, 1980.
[11] F. CRAWFORD, Jr, « Waves », Berkley, 1968.

[12] Josef. TOROK, « Analytical Mechanics », Wiley
interscience pulblication, 2000.
L’ouvrage :
Ce document traite des bases fondamentales des phénomènes de vibration et
présente les outils mathématiques de compréhension permettant d’accéder à
certains concepts associés à ces phénomènes. Il est destiné aux étudiants de
la deuxième année des filières scientifiques des universités et des écoles
préparatoires d’Algérie. Les étudiants y trouveront une initiation au
formalisme de Lagrange, utilisé dans l’analyse des oscillations des systèmes
mécaniques linéaires à un et à plusieurs degrés de liberté. En plus, ils auront
l’occasion de se confronter à des exercices à difficulté variable, leur permettant
de mieux assimiler les concepts traités dans chaque chapitre. Aussi, le
document est enrichi par deux travaux pratiques en relation avec les sujets
traités.
Les auteurs :
Dr Boukli Hacène Fouad est enseignant de physique à l’école préparatoire des
sciences et technologies de Tlemcen. Il est actuellement directeur adjoint
de la pédagogie à l’école et chargé de cours du module « Ondes et vibrations ».
Ses recherches portent sur les énergies renouvelables et compte à son actif
06 publications internationales et d’autres communications nationales et
internationales dans son domaine.
Dr Mebrouki Mohamed est enseignant de physique à l’école préparatoire
des sciences et technologies de Tlemcen. Auparavant, il a assuré le cours
« Ondes et vibrations ». Il est actuellement chargé de cours du module
« Electricité» à l’école. Ses recherches portent sur l’étude numérique des propriétés
physiques des matériaux. Il compte à son actif 04 publications internationales.



















