
Oscillations PHR 101 - Test Page for the...
22
Oscillations mécaniques forcées ‐ Oscillations amorties PHR 101 1 N. FOURATI_ENNOURI Conservatoire National des Arts et Métiers Service de Physique dans ses rapports avec l'industrie PHR 101 "Principes et outils pour l'analyse et la mesure" Leçon n° 3 Oscillations mécaniques forcées Oscillations amorties par frottement visqueux
Transcript of Oscillations PHR 101 - Test Page for the...
Oscillations mécaniques forcées ‐ Oscillations amorties PHR 101
1 N. FOURATI_ENNOURI
Conservatoire National des Arts et Métiers
Service de Physique dans ses rapports avec l'industrie
PHR 101
"Principes et outils pour l'analyse et la mesure"
Leçon n° 3
Oscillations mécaniques forcées
Oscillations amorties par frottement visqueux
Oscillations mécaniques forcées ‐ Oscillations amorties PHR 101
2 N. FOURATI_ENNOURI
1. Oscillations mécaniques forcées sur un système non amorti
Dans le chapitre précédent, nous avons simplement comprimé l'ensemble ressort-masse puis
laissé le système osciller librement. Il s'agissait d'une excitation "statique", si on peut dire, qui
déterminait les conditions initiales du mouvement.
Nous allons considérer que l'oscillateur constitué de l'ensemble masse-ressort subit une excitation
sinusoïdale liée à un dispositif extérieur comme, par exemple, celui représenté sur la figure n°1 :
on est dans le cas d'un oscillateur mécanique en vibrations forcées.
Ce phénomène d'oscillations forcées est d'une grande importance dans la pratique et intervient sur
tous les types d'oscillateurs : mécaniques, acoustiques, électriques, optiques, etc. Par exemple, les
ondes électromagnétiques captées par une antenne mettent en oscillation forcée le circuit
électronique de notre téléphone portable ou de notre récepteur de télévision.
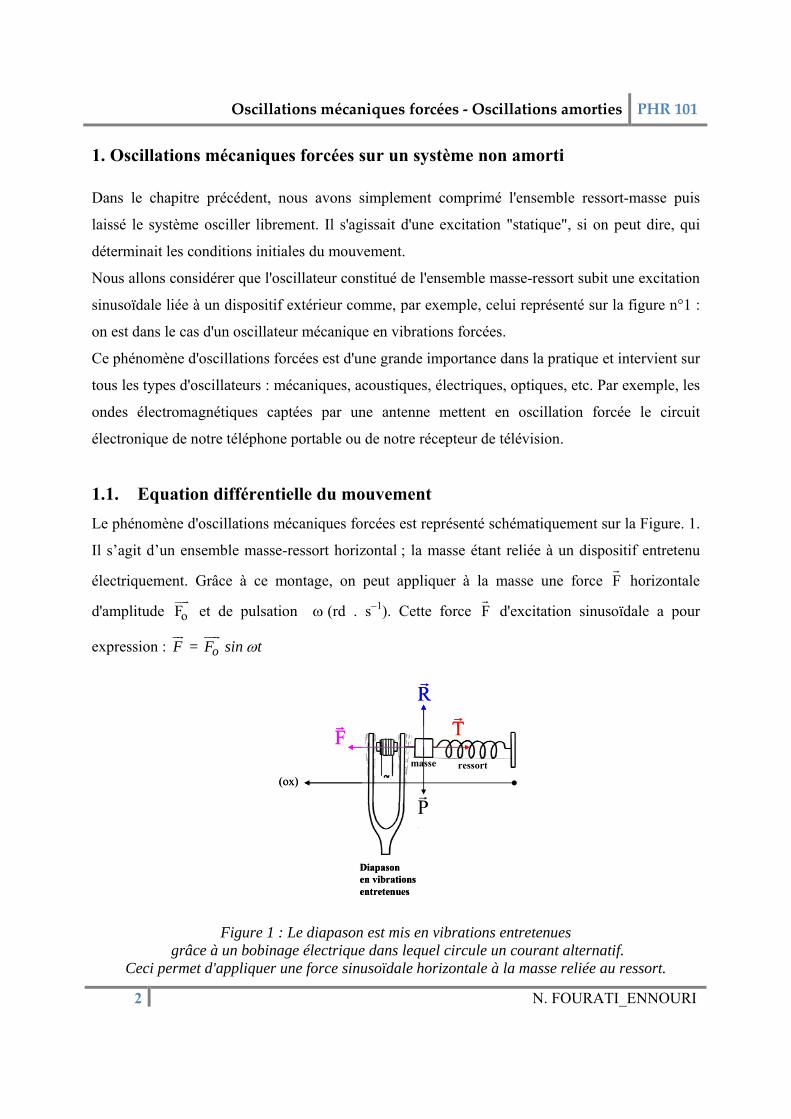
1.1. Equation différentielle du mouvement Le phénomène d'oscillations mécaniques forcées est représenté schématiquement sur la Figure. 1.
Il s’agit d’un ensemble masse-ressort horizontal ; la masse étant reliée à un dispositif entretenu
électriquement. Grâce à ce montage, on peut appliquer à la masse une force F horizontale
d'amplitude oF et de pulsation ω (rd . s−1). Cette force F d'excitation sinusoïdale a pour
expression : oF = F sin tω
ressortmasse
Diapasonen vibrationsentretenues
F
R
T
P(ox)
ressortmasse
Diapasonen vibrationsentretenues
F
R
T
P(ox)
Figure 1 : Le diapason est mis en vibrations entretenues grâce à un bobinage électrique dans lequel circule un courant alternatif.
Ceci permet d'appliquer une force sinusoïdale horizontale à la masse reliée au ressort.

Oscillations mécaniques forcées ‐ Oscillations amorties PHR 101
3 N. FOURATI_ENNOURI
Ainsi dans le bilan des forces appliquées à la masse m on a les forces suivantes :
− Le poids P
− La réaction du support : R
− La force de rappel du ressort : = −T K x
− La force d’excitation sinusoïdale : oF sin tω
La seconde loi de Newton permet d'écrire la relation :
T + F + P + R = m a
En faisant ensuite une la projection sur l'axe horizontal ox , on obtient :
−2
o 2d x Kx + F sin t = m dt
ω
Ceci est l'équation typique d'un mouvement oscillatoire "forcé". On peut la réécrire sous la
forme :
22 o02
Fd x + x = sin tmdt
ω ω [3.1]
Avec :
o 0K = 2 f = m
ω π
ωo = 2 π f0 est la pulsation propre de l'oscillateur libre non amorti.
L'équation différentielle [3.1] a le même premier membre que celle décrivant le mouvement de
l'oscillateur libre non amorti (voir relation [2.11]).

Oscillations mécaniques forcées ‐ Oscillations amorties PHR 101
4 N. FOURATI_ENNOURI
1. 2. Expression de l’élongation x(t)
Nous pouvons résoudre l’équation [3.1] par des techniques classiques mais intuitivement, il est
assez naturel d'imaginer que la masse va être obligée d'osciller à la pulsation ω de la force
appliquée, c'est pourquoi nous allons essayer, comme solution l'expression :
( )x t = A sin ( t + )ω ϕ [3.2]
Dans ca cas : −2
22
d x = A sin ( t + )d t
ω ω ϕ
En remplaçant les expressions de x(t) et 2
2d xd t
dans l'équation différentielle [3.1], on obtient :
−2 2 oo
FA ( ) sin ( t + ) = sin t m
ω ω ω ϕ ω [3.3]
En utilisant ensuite l'identité trigonométrique :
sin ( t + ) = (sin t) . cos + (cos t) . sin ω ϕ ω ϕ ω ϕ
on obtient finalement :
− −2 2 2 2 oo o
FA ( ) (cos ) sin t + A( )(sin ) cos t = sin t m
ω ω ϕ ω ω ω ϕ ω ω
Cette égalité doit être vérifiée à tout instant t si on identifie de chaque coté de l'égalité les
coefficients de sin ωt et cos ωt :
[ ]
[ ]
3 4
3 5
⎧ −⎪⎨
−⎪⎩
2 2o
2 2 oo
A( ) sin = 0 .FA( ) cos = .m
ω ω ϕ
ω ω ϕ

Oscillations mécaniques forcées ‐ Oscillations amorties PHR 101
5 N. FOURATI_ENNOURI
A partir de l’équation [3.4], et compte tenu du fait que o ω ≠ ω et A ≠ 0 on a :
sin ϕ = 0 ϕ = 0
En partant ensuite de l’équation [3.5], nous avons :
( )2 −0
2o
FA = m ω ω
Par conséquent :
( ) ( )2−o
2o
Fx t = sin tm
ωω ω
[3.6]
La figure 2 représente la variation de l'amplitude en fonction de ω. On note que cette amplitude
présente un comportement asymptotique vers une valeur très grande autour de la fréquence ωo.
ω
amplitude
pulsation ωο o
o2o
Fm ω
( )o
2 2o
F
m ω - ω
Figure 2 : Allure de la variation de l'amplitude
d'un oscillateur amorti en oscillation forcée en fonction
de la pulsation de la force sinusoïdale appliquée.
Oscillations mécaniques forcées ‐ Oscillations amorties PHR 101
6 N. FOURATI_ENNOURI
Lorsque la fréquence ω de la force appliquée par l'excitateur (ici le diapason électriquement
entretenu) est égale à la fréquence propre ωo de l'oscillateur, on dit qu'il y a une résonance
d'amplitude.
Nous avons donc montré que sous certaines conditions, l’amplitude des oscillations peut devenir
très importante ; et les conséquences peuvent être graves. On peut citer deux exemples connus :
- La 18 avril 1850 à Angers, un régiment traversant au pas cadencé un pont suspendu
enjambant la Maine provoqua sa destruction ;
- Le 7 novembre 1940, six mois après son inauguration, le pont suspendu de Tacoma
(USA) était détruit par les effets de rafales de vent qui sans être particulièrement violentes
(60 km/h) étaient régulières.
Et nos ponts dans tout ça ? Le pont suspendu joue le rôle du système mécanique pouvant vibrer.
Les rafales de vent ou le pas cadencé jouent le rôle du système extérieur imposant sa fréquence
de vibration au pont. Dans les deux exemples (Angers et Tacoma) il y a eu résonance, c'est-à-dire
accord parfait entre la fréquence de vibration du vent ou du pas cadencé et la fréquence propre du
pont. Les vibrations engendrées ont été suffisamment fortes pour détruire les deux ponts. Mais
heureusement plus d’inquiétude à se faire sur un pont car depuis lors, les codes militaires du
monde entier interdisent à une troupe de marcher au pas sur un pont et lors de la construction
d’un pont (c’est aussi valable pour les gratte-ciel), les constructeurs tiennent compte dans leurs
études de la fréquence naturelle de l’ouvrage en lui donnant une valeur qui ne puisse pas
correspondre à celle de rafales de vent.
Jusque là nous avons traité le cas d’un oscillateur qui se trouvait libre d’évoluer, dans les
paragraphes à venir nous tiendrons compte des amortissements.

Oscillations mécaniques forcées ‐ Oscillations amorties PHR 101
7 N. FOURATI_ENNOURI
2. Oscillations mécaniques libres sur un système amorti par frottement
visqueux
L’étude de l’oscillateur amorti se fait de la même façon que l’oscillateur libre en ajoutant une
force de type frottement fluide (avec un coefficient de frottement visqueux α) de la forme :
f = -α x
L’équation différentielle du mouvement devient :
− − =K x x m xα
ou encore :
0 0+ + = ⇒ + + =Km x K x x x x xm m
αα
On pose ensuite : 20 2= =
K etm m
αω λ
ωo est la pulsation propre de l’oscillateur ; elle correspond à la pulsation avec laquelle il
oscillerait de façon sinusoïdale si les frottements étaient négligeables. On a donc :
202 0+ + =x x xλ ω [3.7]
Il s’agit d’une équation différentielle de second ordre avec second membre nul on passe à
l’équation caractéristique : 2 202 0+ + =r rλ ω
On calcule ensuite le discriminent Δ :
2 204 4Δ = −λ ω

Oscillations mécaniques forcées ‐ Oscillations amorties PHR 101
8 N. FOURATI_ENNOURI
La forme de la solution dépend du signe du discriminent :
1) Si Δ > 0 λ > ω0 Deux racines réelles. Cela correspond au cas où le coefficient de
frottement est grand. L’amortissement est fort.
2) Si Δ < 0 λ < ω0 Deux racines complexes. Cela correspond au cas où le coefficient de
frottement est petit. L’amortissement est faible.
3) Si Δ = 0 λ = ω0 Une racine double réelle. Cela correspond au cas où l’amortissement
est intermédiaire aux deux amortissements précédents. On parle d’amortissement critique.
Le coefficient de frottement a alors une valeur particulière dépendante de la raideur k du
ressort et de la masse m.
3. Oscillateur à frottement faible
3.1. Expression de l’élongation x(t)
C’est le cas où les frottements ne sont pas très importants et où le discriminent de l’équation
caractéristique est négatif. On a dans ce cas :
λ < ω0 22
K K mm m
α α⇒ < ⇒ <
En introduisant l’imaginaire pur i tel que i2 = -1, le discriminent peut s’écrire sous la forme de :
( ) ( ) ( )22 2 2 2 2 2 2 2 2
0 0 0 04 4 4 4 2i iλ ω ω λ ω λ ω λΔ = − = − − = − = −
Les solutions de l’équation caractéristique sont :
2 20 2 2
1 0
2 20 2 2
2 0
2 22
2 22
ir i
ir i
λ ω λλ ω λ
λ ω λλ ω λ
⎧ − − −⎪ = = − − −⎪⎨
− + −⎪= = − + −⎪⎩

Oscillations mécaniques forcées ‐ Oscillations amorties PHR 101
9 N. FOURATI_ENNOURI
Posons 2 20Ω = −ω λ (avec λ = α/2m)
On a donc : 1
2
– r ir i
λλ
= − Ω⎧⎨ = − + Ω⎩
La solution générale de l’équation est :
x(t) = e-λt [A cosΩt + B sin Ωt]
A et B sont deux constantes qui peuvent être déterminées à partir des conditions initiales.
Exemple de calcul pour la détermination des constantes :
Supposons qu’à t = 0 :
( 0) ( 0) 0= = = =Mx t X et x t
Nous avons :
-( ) [ cos sin ] = Ω + Ωtx t e A t B tλ
- -
- -
( ) - [ cos sin ] [- sin cos ]
( ) [- ] cos - [ ] sin
⇒ = Ω + Ω + Ω Ω + Ω Ω
⇒ = + Ω Ω + Ω Ω
t t
t t
x t e A t B t e A t B t
x t e A B t e B A t
λ λ
λ λ
λ
λ λ
En remplaçant t par 0 dans les deux équations, nous obtenons :
MM
MM
A = Xx(0) = A = X X- X + B = 0 B =
⎧⎧ ⎪⇒⎨ ⎨Ω⎩ ⎪ Ω⎩λλ
Par conséquent :
- tM
x(t) = X e [cos t + sin t]Ω ΩΩ
λ λ [3.8]
Oscillations mécaniques forcées ‐ Oscillations amorties PHR 101
10 N. FOURATI_ENNOURI
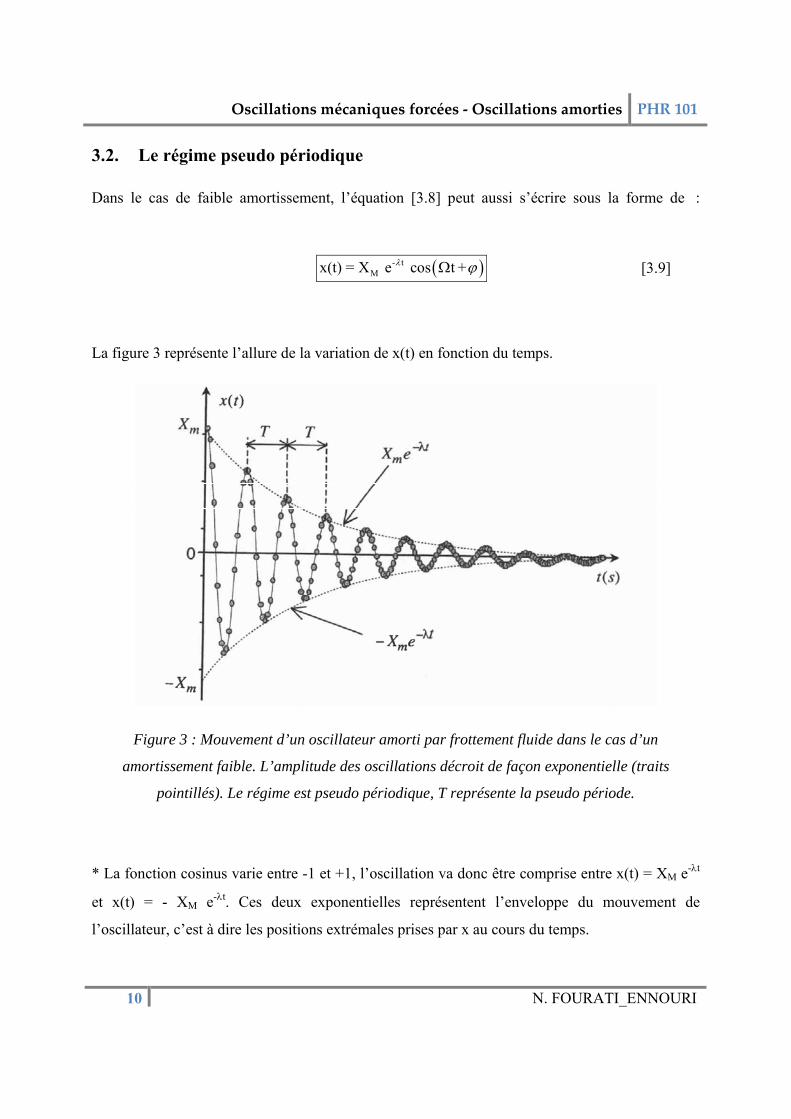
3.2. Le régime pseudo périodique
Dans le cas de faible amortissement, l’équation [3.8] peut aussi s’écrire sous la forme de :
( )- tMx(t) = X e cos t +Ωλ ϕ [3.9]
La figure 3 représente l’allure de la variation de x(t) en fonction du temps.
Figure 3 : Mouvement d’un oscillateur amorti par frottement fluide dans le cas d’un
amortissement faible. L’amplitude des oscillations décroit de façon exponentielle (traits
pointillés). Le régime est pseudo périodique, T représente la pseudo période.
* La fonction cosinus varie entre -1 et +1, l’oscillation va donc être comprise entre x(t) = XM e-λt
et x(t) = - XM e-λt. Ces deux exponentielles représentent l’enveloppe du mouvement de
l’oscillateur, c’est à dire les positions extrémales prises par x au cours du temps.

Oscillations mécaniques forcées ‐ Oscillations amorties PHR 101
11 N. FOURATI_ENNOURI
* La décroissance de la fonction exponentielle est guidée par le coefficient λ = α/ 2m qui traduit
l’amortissement plus ou moins prononcé du mouvement.
Si α = 0, le mouvement est non amorti et on retrouve le cas de l’oscillateur harmonique libre
(Leçon n°2).
* Le terme cos(Ωt + φ) traduit la périodicité du mouvement s’il n’y avait pas d’amortissement.
* Le mouvement n’est plus périodique puisqu’au bout d’un temps T l’élongation de l’oscillateur
ne reprend plus la même valeur : x(t) ≠ x(t + T) : l’amplitude des oscillations diminue avec le
temps. On parle de mouvement pseudo périodique.
* La grandeur Ω s’appelle la pseudo pulsation et elle est inférieure à la pulsation propre ω0. En
effet : 2
2 20 0 02
0
1Ω = − = − <λω λ ω ωω
* La pseudo période T correspond à l’intervalle de temps qui sépare deux passages successifs par
la position x = 0 ou deux maximas consécutifs. Elle est donnée par la relation :
2 20
2 2= =
Ω −T π π
ω λ avec λ = α / 2m
La pseudo période peut s’exprimer en fonction de la période propre T0 de l’oscillateur
harmonique (absence de frottement) :
0 02 2 2 20
2 20 0
22 2
1 1= = = =
Ω − − −
TT π ωπ π
ω λ λ λω ω
La pseudo période est supérieure à la période propre. En effet, à cause des frottements, la masse
m met un peu plus de temps pour faire un aller et retour et l’amplitude de son mouvement
diminue.

Oscillations mécaniques forcées ‐ Oscillations amorties PHR 101
12 N. FOURATI_ENNOURI
Dans le cas où l’oscillateur est très faiblement amorti (λ << ω0) il est possible de donner une
expression approchée de la pseudo-pulsation et de la pseudo-période. En faisant l’approximation :
(λ << ω0) on a :
12 22
0 02 20 0
11 12
⎛ ⎞ ⎛ ⎞Ω = = − ≈ − ×⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
λ λω ωω ω
Et la pseudo période T devient :
12 22
0 02 20 0
11 12
−⎛ ⎞ ⎛ ⎞
= − ≈ + ×⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
T T Tλ λω ω
4. Oscillateur à frottement fort
4.1. Expression de l’élongation x(t)
C’est le cas où les frottements sont plus importants, c'est-à-dire lorsque le coefficient
d’amortissement vérifie la condition :
λ > ω0 22
⇒ > ⇒ >K K m
m mα α
Le discriminent Δ est positif et il existe alors deux solutions réelles pour l’équation
caractéristique. On a :
( ) ( )2 22 2 2 2
0 04 4 2 2Δ = − = − =λ ω λ ω β
Les solutions seront donc :

Oscillations mécaniques forcées ‐ Oscillations amorties PHR 101
13 N. FOURATI_ENNOURI
( )
( )
12 2
0
2
2 2 02
2 2 202
− −⎧ = = − + <⎪⎪ = − =⎨ − +⎪ = = − − <⎪⎩
ravec et
mr
λ β λ βαβ λ ω λ
λ β λ β
La solution générale de l’équation différentielle est alors :
( ) ( )− − − ++t tx(t) = Ae C eλ β λ β
Reprenons les conditions initiales les plus souvent utilisées pour déterminer les valeurs des
constantes A et C : ( 0) ( 0) 0= = = =Mx t X et x t
( ) ( ) ( ) ( ) ( ) ( )− − − + − − − ++ ⇒ − − − +t t t tx(t) = Ae C e x(t) = A e C eλ β λ β λ β λ βλ β λ β
( ) ( )( 0) A C( 0) 0 A C 0
12
12
= = ⇒ + =⎧⎪⎨ = = ⇒ − − − + =⎪⎩
⎧ ⎛ ⎞= +⎪ ⎜ ⎟
⎪ ⎝ ⎠⇒ ⎨⎛ ⎞⎪ = −⎜ ⎟⎪ ⎝ ⎠⎩
M M
M
M
x t X Xx t
XA
XC
λ β λ β
λβ
λβ
Finalement l’élongation x(t) s’écrit sous la forme de :
( ) ( )1 12
− − − +⎡ ⎤⎛ ⎞ ⎛ ⎞+ + −⎢ ⎥⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠⎣ ⎦
t tMXx(t) = e eλ β λ βλ λβ β
[3.10]
Oscillations mécaniques forcées ‐ Oscillations amorties PHR 101
14 N. FOURATI_ENNOURI
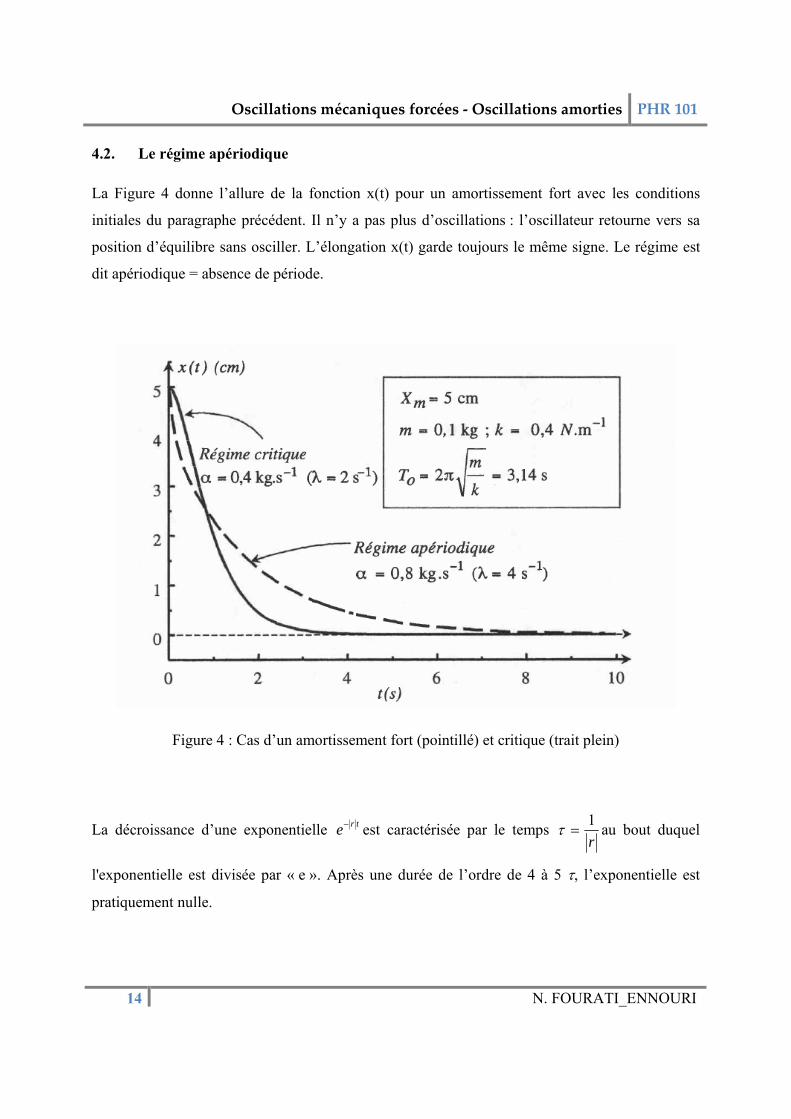
4.2. Le régime apériodique
La Figure 4 donne l’allure de la fonction x(t) pour un amortissement fort avec les conditions
initiales du paragraphe précédent. Il n’y a pas plus d’oscillations : l’oscillateur retourne vers sa
position d’équilibre sans osciller. L’élongation x(t) garde toujours le même signe. Le régime est
dit apériodique = absence de période.
Figure 4 : Cas d’un amortissement fort (pointillé) et critique (trait plein)
La décroissance d’une exponentielle − r te est caractérisée par le temps 1=
rτ au bout duquel
l'exponentielle est divisée par « e ». Après une durée de l’ordre de 4 à 5 τ, l’exponentielle est
pratiquement nulle.

Oscillations mécaniques forcées ‐ Oscillations amorties PHR 101
15 N. FOURATI_ENNOURI
Le temps caractéristique ou temps de relaxation de l’oscillateur en régime apériodique va être
déterminé par l'évolution de l'exponentielle la plus lente parmi les deux exponentielles
décroissantes qui interviennent dans l'expression de x(t).
Comme :│r1│ = (λ - β) et │r2│ = (λ + β) on a donc : :│r1│ < │r2│ τ1 > τ2
C’est le plus grand qui correspondra au temps de relaxation de l’oscillateur c'est-à-dire τ1.
5. Cas limite de l'amortissement critique
5.1. Expression de l'élongation x(t)
C'est le cas très particulier où le coefficient d'amortissement prend une valeur qui annule le
discriminant de l'équation caractéristique :
22
= ⇒ =K K m
m mα α
Dans ce cas, on va avoir une racine double réelle pour l'équation caractéristique.
2 20 0
24 4 02
Δ = − = ⇒ = − = − = −r λλ ω λ ω
La solution générale de l'équation différentielle du mouvement de l'oscillateur est alors :
( ) ( ) 0−= + tx t At B e ω
Avec les constantes A et B dépendantes des conditions initiales.
( ) ( ) ( ) ( )0 00
− −⎡ ⎤= + ⇒ = − +⎣ ⎦t tx t At B e x t A At B eω ωω
Si à t = 0 : 0
( 0) ( 0) 0=⎧
= = = = ⇒ ⎨ =⎩M
MM
B Xx t X et x t
A Xω
Oscillations mécaniques forcées ‐ Oscillations amorties PHR 101
16 N. FOURATI_ENNOURI
L’élongation x(t) s’écrit alors sous la forme de :
( ) ( ) 00 1 −= + t
Mx t X t e ωω [3.11]
5.2. Le régime critique
La variation de l’élongation x(t), dans le cas particulier du régime critique, est représentée sur la
Figure. 4. Là encore, il y a retour à la position d’équilibre sans aucune oscillation (l’amplitude
garde le même signe). Il faut noter que ce retour se fait plus rapidement que le régime
apériodique.
Le temps de relaxation pour le régime critique est 0
1=cτ
ω.
Compte tenu des valeurs numériques de la Figure 4, on obtient : 0 5=c . sτ . Au bout d’environ
2.5 à 3 s l’oscillateur revient à sa position d’équilibre.
De façon générale le temps de relaxation pour le régime apériodique est toujours plus important
que celui du régime critique. Si on désire un retour rapide à l’équilibre (pour les amortisseurs
d’une voiture par exemple) on a un intérêt de se rapprocher le plus possible du régime critique.
6. Oscillations forcées d'un système avec amortissement : étude de la
dynamique du mouvement
Dans beaucoup d'applications, les forces d'amortissement sont proportionnelles à la vitesse du
mobile comme c'est le cas pour les phénomènes de viscosité.
Les seules forces participant au mouvement de la masse selon l’axe (ox) sont :
− la force de rappel du ressort : Kx−
− la force sinusoïdale de mise en oscillation forcée (excitateur) : oF cos tω

Oscillations mécaniques forcées ‐ Oscillations amorties PHR 101
17 N. FOURATI_ENNOURI
− la force d'amortissement proportionnelle à la vitesse (le terme α est souvent appelé
"coefficient d'amortissement") : v− α (α > 0)
En considérant uniquement les projections algébriques sur un axe horizontal et en appliquant la
seconde loi de Newton on a :
2
2 cos odx d xK x F t mdt dt
− + ω − α =
ce que l'on peut écrire encore en divisant par m et en posant 20 2= =
K etm m
αω λ
2 002 cosFx x x t
mλ ω ω+ + = [3.12]
6.1. Solution de l’équation différentielle
La solution générale de cette équation différentielle est la somme de deux termes :
- La solution générale de l’équation sans second membre (correspondant au régime
transitoire)
- Une solution particulière de l’équation avec second membre (correspondant au régime
permanent).
6.1.1. Le régime transitoire
Ce premier terme correspond à la solution de l’équation différentielle de l’oscillateur libre qui a
été étudié précédemment. Il existe donc trois régimes possibles :
- Le régime pseudo-périodique pour lequel l’amplitude des oscillations décroît
exponentiellement
- Les régimes apériodique et critique pour les quels il y’a retour à l’équilibre sans
oscillation.
Oscillations mécaniques forcées ‐ Oscillations amorties PHR 101
18 N. FOURATI_ENNOURI
Dans les trois cas il y’a toujours un retour à l’équilibre au bout d’un temps , plus ou moins bref
selon les conditions expérimentales. La solution x(t) tend vers zéro.
La solution générale de l’équation sans second membre correspond donc à un régime transitoire
(qui ne dure qu’ « un certain temps »).
6.1.2. Le régime permanent
Lorsque le régime transitoire a pratiquement disparu il ne reste plus que la solution particulière
qui correspond alors au régime permanent (le régime « qui subsiste »). Le système adopte alors
un mouvement de type sinusoïdal, non pas à da pulsation propre ω0 ou à une pulsation Ω
caractéristique de l’amortissement, mais avec une pulsation ω imposée par la force excitatrice.
Les oscillations de la masse ne sont pas forcément en phase avec la force excitatrice et présente
un déphasage ϕ .
Comme dans le cas de l'oscillation forcée sans amortissement, nous résolvons de façon "intuitive"
l’équation différentielle [3.12] en supposant une solution sinusoïdale pour le déplacement de la
masse :
( ) 0 cos( )x t X t= ω + ϕ
Ce qui revient à dire, là encore, qu'il y a synchronisation entre l'excitateur et l'oscillateur (masse-
ressort-amortisseur).
Pour des raisons pratiques, il est commode d’utiliser la notation complexe :
( ) ( )0
0 cos( ) i i t
X
x t A t x t X e eϕ ω= ω + ϕ ⇒ =
0X est l’amplitude complexe. Déterminer les grandeurs X0 et ϕ revient donc à chercher le
module et l’argument de l’amplitude complexe.

Oscillations mécaniques forcées ‐ Oscillations amorties PHR 101
19 N. FOURATI_ENNOURI
6.2. Etude de l’élongation x(t)
Le passage de la notation réelle à la notation complexe permet d’écrire :
( )( ) ( )( ) ( )
0
02 2
0
0( )
i t
i t
i t
i t
x t X e
x t X i e i x t
x t X e x t
F t F e
ω
ω
ω
ω
⎧ =⎪⎪ = ω = ω⎪⎨
= − ω = − ω⎪⎪⎪ =⎩
L’équation [3. 12] exprimée en notation complexe devient :
( )2 2 00 02 i t i tFi X e e
mω ωω ω λ ω− + + =
L’amplitude complexe 0X est telle que :
( )( )0
0 02 20 2
i
FmX X e
iϕ
ω ω ω λ= =
− + [3.13]
6.2.1. Réponse en amplitude
L’amplitude X0 de l’oscillateur s’obtient en exprimant le module de l’amplitude complexe :
( ) ( )
0
0 0 2 22 20 2
FmX X
ω ω ωλ= =
− + [3.14]

Oscillations mécaniques forcées ‐ Oscillations amorties PHR 101
20 N. FOURATI_ENNOURI
La recherche d’un maximum éventuel de l’amplitude peut se faire en minimisant le dénominateur
D ou encore son carré ( ) ( )2 22 2 2
0 2D ω ω ωλ= − + .
Posons 2u ω= ( )22 2 20 4D u uω λ⇒ = − +
Pour minimiser D2, il faut que :
2 2 2 2
0 0 2 0 0 ou 0d D d D d u d D d Dd d u d d u d u
ω ωω ω
= ⇒ × = ⇒ × = ⇒ = =
Or :
( ) ( )222 2 2 2 2
0 04 2 4d DD u u ud u
ω λ ω λ= − + ⇒ = − − +
Cette dérivée s’annule pour : ( )2 2 20 2 0u ω ω λ= = − >
Cette solution n’est donc possible que si : 2
2 20 22 2
2K K mm m
αω λ α> ⇒ > <
Ce maximum en amplitude ne se produira donc que pour les amortissements faibles.
6.2.2. Réponse en phase
La phase de l’oscillateur s’obtient en exprimant l’argument de l’amplitude complexe. On obtient :
( ) ( )( ) ( )( )
( )( )
0
2 200 02 2
00
2 20
arg arg arg arg 22
arg 2
FFmX imi
i
ϕ ω ω ωλω ω ωλ
ϕ ω ω ωλ
⎛ ⎞⎜ ⎟ ⎛ ⎞= = = − − +⎜ ⎟ ⎜ ⎟
⎝ ⎠− +⎜ ⎟⎝ ⎠
⇒ = − − +
Oscillations mécaniques forcées ‐ Oscillations amorties PHR 101
21 N. FOURATI_ENNOURI
On en déduit :
( )
( )( )
22 2 2 20
2 20
2 20
2sin4 2
2arctg
tg
λ ωϕω ω ω λ λ ωϕ
ω ωλ ωϕω ω
−⎧ =⎪⎛ ⎞− +⎪ −⎜ ⎟⇒ =⎨ ⎜ ⎟−−⎪ ⎝ ⎠=⎪ −⎩
Le sinus est toujours négatif, la phase va donc varier entre π et 2π.
7. Analogie entre les phénomènes mécaniques et électriques
Il apparaît à ce stade une analogie entre les phénomènes mécaniques et électriques.
Ecrivons l'une en dessous de l'autre les deux relations :
2o2
d x dxm + a + K x = F sin tdtdt
inertie amortisseur ressort force appliquée(Newton)
ω
2o2
d q dq qL + R + = V sin tdt Cdt
induction résistance capacité tension appliquée(self)
ω
A travers ces deux relations on voit que :
- la masse en mécanique joue le même rôle que la self en électricité : ceci traduit le
phénomène d'inertie qui en électricité se traduit par la phrase que l'on prononce toujours à
l'occasion de l'étude de la loi de l'auto-induction (loi de Lenz) "la f.e.m induite s'oppose à
la cause qui lui a donné naissance".
- La force de frottement visqueux introduite par l'amortisseur correspond en électricité à
la résistance électrique, c'est dans les deux cas des phénomènes liés à des pertes d'énergie
c'est-à-dire des phénomènes dissipatifs.

Oscillations mécaniques forcées ‐ Oscillations amorties PHR 101
22 N. FOURATI_ENNOURI
- La force mécanique de rappel du ressort peut être comparée à la tension entre les
armatures d'un condensateur. Le condensateur en électricité est l'équivalent de
l'élasticité du ressort en mécanique.


















