notes_gpa783 (2).pdf
206
DEPARTEMENT DE GENIE DE LA PRODUCTION AUTOMATISEE GPA-783 ASSERVISSEMENT NUMERIQUE EN TEMPS REEL NOTES DE COURS par PASCAL BIGRAS RÉDIGÉ: Juillet 1999 REVISÉ: Été 2011
-
Upload
jeffrey-abbott -
Category
Documents
-
view
234 -
download
7
Transcript of notes_gpa783 (2).pdf
-
DEPARTEMENT DE GENIE DE LA PRODUCTION AUTOMATISEE
GPA-783 ASSERVISSEMENT NUMERIQUE EN TEMPS REEL
NOTES DE COURS
par
PASCAL BIGRAS
RDIG: Juillet 1999 REVIS: t 2011
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel i
Table des matires
TABLE DES MATIRES ............................................................................................................................ ILISTE DES TABLEAUX ............................................................................................................................ VLISTE DES FIGURES ............................................................................................................................... VICHAPITRE 1 CONVERSION ET CHANTILLONNAGE DES SIGNAUX .................................... 1
1.1 INTRODUCTION ................................................................................................................................. 11.2 CONVERTISSEUR NUMRIQUE ANALOGIQUE .................................................................................. 2
1.2.1 Rsolution du convertisseur .................................................................................................... 41.2.2 Valeur Maximum .................................................................................................................... 41.2.3 Gain du convertisseur N/A ...................................................................................................... 41.2.4 Linarit du convertisseur ...................................................................................................... 51.2.5 Circuit R-2R invers ............................................................................................................... 5
1.3 CONVERTISSEUR ANALOGIQUE NUMRIQUE .................................................................................. 51.3.1 Convertisseur approximation successive ............................................................................. 61.3.2 Gain du convertisseur A/N ...................................................................................................... 71.3.3 Encodeur incrmental ............................................................................................................. 8
1.4 CONVERTISSEUR A/N ET CHANTILLONNEUR ................................................................................... 91.4.1 Thorme dchantillonnage ................................................................................................ 121.4.2 Filtre anti-repliement............................................................................................................ 16
1.5 CONVERSION N/A ET BLOQUEUR DORDRE ZRO ............................................................................ 161.5.1 Fonction de transfert du bloqueur dordre 0 ........................................................................ 181.5.2 Rponse en frquence du bloqueur dordre 0 ....................................................................... 19
CHAPITRE 2 TRANSFORME EN Z ................................................................................................ 202.1 INTRODUCTION ............................................................................................................................... 202.2 DFINITION DE LA TRANSFORME EN Z ........................................................................................... 202.3 SRIE GOMTRIQUE ....................................................................................................................... 212.4 QUELQUES EXEMPLES DE TRANSFORME EN Z ................................................................................ 222.5 TRANSFORME EN Z DE FONCTIONS DE TRANSFERT EN S ................................................................. 24
2.5.1 Fractions partielles pour des ples simples .......................................................................... 25
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel ii
2.5.2 Fractions partielles pour des ples multiples ....................................................................... 262.6 UTILISATION DES TABLES ............................................................................................................... 282.7 PROPRITS DE LA TRANSFORME EN Z .......................................................................................... 302.8 TRANSFORME EN Z DU BLOQUEUR DORDRE ZRO ........................................................................ 352.9 TRANSFORMATION DES SCHMAS BLOCS HYBRIDES ....................................................................... 35
2.9.1 Procdure de transformation des systmes hybrides ............................................................ 38CHAPITRE 3 TRANSFORME EN Z INVERSE .............................................................................. 46
3.1 INTRODUCTION ............................................................................................................................... 463.2 DFINITION DE LA TRANSFORME EN Z INVERSE ............................................................................. 463.3 UNICIT DE LA TRANSFORME EN Z INVERSE .................................................................................. 463.4 MTHODE DES QUATIONS RCURRENTES ...................................................................................... 473.5 RALISATION DES CONTRLEURS ................................................................................................... 56
CHAPITRE 4 COMPENSATEURS PI, PD ET PID ........................................................................... 614.1 INTRODUCTION ............................................................................................................................... 614.2 FONCTIONS DE TRANSFERT DISCRTE DU PI .................................................................................... 61
4.2.1 Approximation rectangulaire ................................................................................................ 624.2.2 Approximation rectangulaire devance ................................................................................ 634.2.3 Approximation trapzodale ................................................................................................. 644.2.4 Fonction de transfert du PI avec lapproximation trapzodale ........................................... 65
4.3 FONCTIONS DE TRANSFERT DISCRTE DU PD .................................................................................. 664.4 FONCTIONS DE TRANSFERT DISCRTE DU PID ................................................................................. 684.5 IMPLANTATION DU COMPENSATEUR PI ........................................................................................... 694.6 IMPLANTATION DU COMPENSATEUR PD .......................................................................................... 704.7 IMPLANTATION DU COMPENSATEUR PID ........................................................................................ 724.8 CALCUL DES GAINS: MTHODE DE ZIEGLER-NICOLS ...................................................................... 73
CHAPITRE 5 ERREURS EN RGIME PERMANENT .................................................................... 795.1 INTRODUCTION ............................................................................................................................... 795.2 SYSTME DE COMMANDE TYPIQUE .................................................................................................. 795.3 TYPE DUNE FONCTION DE TRANSFERT ........................................................................................... 81
5.3.1 Fonction de transfert continu ............................................................................................... 815.3.2 Fonction de transfert discrte ............................................................................................... 82
5.4 CALCUL DES ERREURS EN RGIME PERMANENT .............................................................................. 825.4.1 Entre chelon ...................................................................................................................... 835.4.2 Entre rampe ........................................................................................................................ 845.4.3 Entre parabole .................................................................................................................... 86
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel iii
5.5 CHOIX DU COMPENSATEUR ............................................................................................................. 925.6 SYSTME DE COMMANDE DOUBLE RTROACTION ........................................................................ 92
CHAPITRE 6 CONCEPTION DES COMPENSATEURS ................................................................. 966.1 INTRODUCTION ............................................................................................................................... 966.2 SPCIFICATIONS TRANSITOIRES ...................................................................................................... 97
6.2.1 Rponse lchelon des systmes de premier ordre ............................................................. 976.2.2 Rponse lchelon des systmes de deuxime ordre .......................................................... 98
6.3 TRANSFORMATION CONFORME DU PLAN S AU PLAN Z ....................................................................1016.3.1 Transformation de la rgion de stabilit .............................................................................1026.3.2 Transformation des ples dun systme de premier ordre ...................................................1036.3.3 Transformation des ples dun systme de deuxime ordre ................................................103
6.4 CONCEPTION PAR IMPOSITION DES PLES ......................................................................................1046.5 ANNULATION PLES ZROS ............................................................................................................1096.6 IMPOSITION PARTIELLE DES PLES .................................................................................................111
6.6.1 Imposition des ples dominants ...........................................................................................1116.6.2 Imposition dun dpassement nul ........................................................................................114
6.7 IMPOSITION DUN MODLE DE RFRENCE .....................................................................................1156.7.1 Modle de rfrence ............................................................................................................1156.7.2 Transformation du modle de rfrence dans le domaine de z ............................................1166.7.3 Compensateur anticipatif et imposition dun modle de rfrence .....................................119
6.8 SUIVI DE TRAJECTOIRE ...................................................................................................................1286.8.1 Gnration de trajectoire ....................................................................................................1286.8.2 Conception du compensateur ..............................................................................................129
CHAPITRE 7 COMPENSATEURS POLYNOMIAUX ....................................................................1497.1 INTRODUCTION ..............................................................................................................................1497.2 QUELQUES NOTIONS DALGBRE ...................................................................................................149
7.2.1 quation de Diophantine .....................................................................................................1497.2.2 Existence de la solution de lquation de Diophantine ........................................................152
7.3 STRUCTURE DU COMPENSATEUR POLYNOMIAL ..............................................................................1547.3.1 Fonction de transfert en chane ferme ...............................................................................1557.3.2 Imposition des ples ............................................................................................................1567.3.3 Gain du systme en chane ferme .......................................................................................1577.3.4 Conception par la mthode dimposition des ples .............................................................158
7.4 AJOUT DUN INTGRATEUR DANS LE COMPENSATEUR ...................................................................1687.5 IMPOSITION DUN MODLE DE RFRENCE .....................................................................................1707.6 SUIVI DE TRAJECTOIRE ...................................................................................................................173
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel iv
CHAPITRE 8 STABILIT DES SYSTMES CHANTILLONNS .............................................1758.1 INTRODUCTION ..............................................................................................................................1758.2 TUDE DE STABILIT PAR LE CALCUL DES PLES ...........................................................................1758.3 TUDE DE STABILIT LAIDE DU CRITRE DE JURY ......................................................................177
8.3.1 Critre de jury pour les systmes de deuxime ordre ..........................................................1798.3.2 Critre de jury pour les systmes de troisime ordre ..........................................................179
CHAPITRE 9 IDENTIFICATION DES SYSTMES .......................................................................1829.1 INTRODUCTION ..............................................................................................................................1829.2 IDENTIFICATION PAR MOINDRE CARR ...........................................................................................183
RFRENCES ..........................................................................................................................................195
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel v
Liste des tableaux
Tableau 2-1 : Transformes en z ...................................................................................................... 44Tableau 4-1 : Gain des compensateurs ........................................................................................... 76Tableau 5-1 : Calcul des erreurs en rgime permanent ................................................................. 88Tableau 8-1 :Tableau de Jury .......................................................................................................... 178
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel vi
Liste des figures
Figure 1.1 : Systme de commande par ordinateur ......................................................................... 2Figure 1.2 : Principe de fonctionnement du convertisseur N/A .................................................. 3Figure 1.3 : Convertisseur R-2R invers ........................................................................................... 5Figure 1.4 : Convertisseur approximation successive .................................................................. 6Figure 1.5 : Exemple de conversion d'un convertisseur 3 bits ................................................... 7Figure 1.6 : Encodeur incrmental .................................................................................................... 8Figure 1.7 : Convertisseur A/N synchronis avec une horloge .................................................. 10Figure 1.8 : Modlisation du convertisseur A/N .......................................................................... 10Figure 1.9 : Symbole d'un chantillonneur ..................................................................................... 11Figure 1.10 : Signaux l'entre et la sortie de l'chantillonneur ............................................... 11Figure 1.11 : Exemple de transformation de Fourier d'un signal................................................ 13Figure 1.12 : Rponse en frquence d'un systme de premier ordre .......................................... 15Figure 1.13 : Convertisseur N/A synchronis avec une horloge ................................................ 16Figure 1.14 : Modlisation du convertisseur N/A ........................................................................ 16Figure 1.15 : Filtre idal pour la transformation d'un signal chantillonn en signal continu.17Figure 1.16 : Fonctionnement du bloqueur d'ordre 0 .................................................................. 17Figure 1.17 : Modle d'un convertisseur N/A usuel ..................................................................... 18Figure 1.18 : Rponse impulsionnelle du bloqueur dordre 0 ...................................................... 18Figure 1.19 : Rponse en frquence d'un filtre de transformation dun signal chantillonn en
signal continu idal et du bloqueur d'ordre 0 ........................................................................ 19Figure 2.1 : Signal avec retard ........................................................................................................... 34Figure 2.2 : Schma blocs dun systme hybride. .......................................................................... 36Figure 2.3 : Systme hybride de base ............................................................................................... 37Figure 2.4 : Transformation de base. ............................................................................................... 38Figure 2.5 : Exemple de systme hybride ....................................................................................... 39Figure 2.6 : Systme transform ....................................................................................................... 39Figure 2.7 : Exemple de systme avec un chantillonneur virtuel .............................................. 40Figure 2.8 : Systme transform ....................................................................................................... 40Figure 2.9 : Schma-blocs hybride de l'exemple 2.9.1 .................................................................. 41
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel vii
Figure 2.10 : Schma-blocs de l'exemple 2.9.1 avec un chantillonneur virtuel ....................... 42Figure 2.11 : Parcours associs l'exemple 2.9.1 ........................................................................... 42Figure 2.12 : tape 3) de la procdure de transformation pour l'exemple 2.9.1 ....................... 43Figure 3.1 : Signaux chantillonns ................................................................................................. 47Figure 3.2 : Sous-systme pour la mthode des quations rcurrentes ...................................... 47Figure 3.3 : Systme hybride ............................................................................................................. 49Figure 3.4 : Systme chantillonn .................................................................................................. 49Figure 3.5 : Rponse de systme ...................................................................................................... 52Figure 3.6 : Algorithme de simulation ............................................................................................. 53Figure 3.7 : Systme chantillonn .................................................................................................. 54Figure 3.8 : Rponse du systme ...................................................................................................... 55Figure 3.9 : Algorithme de simulation ............................................................................................. 56Figure 3.10 : Systme de contrle .................................................................................................... 57Figure 3.11 : Algorithme de ralisation du compensateur............................................................ 58Figure 3.12 : Exemple d'un compensateur de 2ime ordre ......................................................... 59Figure 3.13 : Algorithme de ralisation du compensateur............................................................ 60Figure 4.1 : Schma blocs du compensateur PI. ............................................................................ 62Figure 4.2 : Approximation rectangulaire. ...................................................................................... 63Figure 4.3 : Approximation rectangulaire devance. ..................................................................... 64Figure 4.4 : Approximation trapzodale. ....................................................................................... 65Figure 4.5 : Schma bloc en z du compensateur PI. ..................................................................... 66Figure 4.6 : Schma bloc du compensateur PD. ........................................................................... 67Figure 4.7 : Approximation de la drive. ...................................................................................... 67Figure 4.8 : Schma blocs en z du compensateur PID. ................................................................ 68Figure 4.9 : Ordinogramme de l'implantation d'un compensateur PI. ....................................... 70Figure 4.10 : Ordinogramme de l'implantation d'un compensateur PD. ................................... 72Figure 4.11 : Ordinogramme de l'implantation d'un compensateur PID. ................................. 74Figure 4.12 : Rponse lchelon du systme en boucle ouverte. .............................................. 75Figure 4.13 : Paramtres a et L de la mthode Ziegler-Nicols. ................................................... 75Figure 4.14 :Systme en chane ouverte. ......................................................................................... 76Figure 4.15 : Rponse lchelon du systme en chane ouverte. .............................................. 77Figure 4.16 : Systme en chane ferme avec le compensateur PI .............................................. 78
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel viii
Figure 4.17 : Rponse lchelon du systme en chane ferme. ................................................ 78Figure 5.1 : Schma bloc d'un systme de commande. ................................................................ 80Figure 5.2 : Systme de commande transform. ............................................................................ 80Figure 5.3 : Systme de commande simplifi. ................................................................................ 81Figure 5.4 : Erreur en rgime permanent pour un chelon ......................................................... 83Figure 5.5 : Erreur en rgime permanent pour une rampe. ......................................................... 85Figure 5.6 : Erreur en rgime permanent pour une parabole. ..................................................... 86Figure 5.7 : Contrle proportionnel d'un moteur cc ..................................................................... 89Figure 5.8 : Schma-bloc transform .............................................................................................. 89Figure 5.9 : Contrleur proportionnel intgrale d'un moteur cc ................................................. 90Figure 5.10 : Schma-bloc transform ............................................................................................ 91Figure 5.11 : Systme de commande double rtroaction .......................................................... 93Figure 5.12 : Premire tape de la transformation du systme double rtroaction ............... 93Figure 5.13 : Schma bloc impliquant seulement des fonctions de transfert en z. ................... 94Figure 5.14 : Schma bloc simplifi. ................................................................................................ 95Figure 5.15 : Schma bloc pour le calcul des erreurs en rgime permanent. ............................. 95Figure 6.1 : Rponse l'chelon d'un systme premier ordre ..................................................... 98Figure 6.2 : Rponse l'chelon d'un systme deuxime ordre ................................................ 100Figure 6.3 : Ples d'un systme de deuxime ordre dans le plan s. ........................................... 101Figure 6.4 : Transformation du plan s au plan z. ......................................................................... 102Figure 6.5 : Transformation de la rgion de stabilit du plan s au plan z. ............................... 102Figure 6.6 : Schma blocs hybride d'un contrleur PI appliqu un moteur CC. ................. 106Figure 6.7 : Schma blocs dans le domaine de z. ........................................................................ 107Figure 6.8 : Schma blocs du sysme dans le domaine de z. ..................................................... 109Figure 6.9 : Schma blocs aprs l'annulation ple zro. ............................................................. 110Figure 6.10 : Rponse lchelon de 2 120( 1) ( 10)( 12)s s s+ + + et de 2
1( 1)s+ . ............................................. 112
Figure 6.11 : Transformation du modle de rfrence. .............................................................. 117Figure 6.12 : Boucle de commande avec compensateur anticipatif. ......................................... 120Figure 6.13 : Schma bloc transform de la boucle de commande. ......................................... 120Figure 6.14 : Boucle de commande avec compensateur anticipatif en avant. ......................... 121
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel ix
Figure 6.15 :Commande par ordinateur d'un moteur CC l'aide d'un PI et de compensateur
anticipatif. ................................................................................................................................. 122Figure 6.16 : Transformation du compensateur anticipatif ....................................................... 123Figure 6.17 : Schma blocs en z du systme. ............................................................................... 124Figure 6.18 : Boucle de commande en cascade avec compensateur anticipatif. ..................... 127Figure 6.19 : Boucle de commande simplifie. ............................................................................ 128Figure 6.20 : Trajectoire linaire portions quadratiques. ......................................................... 130Figure 6.21 : Compensateur anticipatif idal. ............................................................................... 131Figure 6.22 : Systme de compensateurs pour un suivi de trajectoire rel. ............................. 132Figure 6.23 :Suivi de trajectoire avec conditions initiales. .......................................................... 133Figure 6.24 : Transformation du compensateur anticipatif. ...................................................... 133Figure 6.25 : Transformation des conditions initiales. ................................................................ 134Figure 6.26 : Transformation de sparation. ................................................................................ 134Figure 6.27 : Transformation de la boucle infrieure. ................................................................ 135Figure 6.28 : Simplification ............................................................................................................. 135Figure 6.29 : Schma blocs de l'erreur de suivi. ........................................................................... 136Figure 6.30 : Simplification du schma blocs de l'erreur de suivi. ............................................ 136Figure 6.31 : Rponse impulsionnelle d'un systme de deuxime ordre. ................................. 137Figure 6.32 : Satellite commander. .............................................................................................. 138Figure 6.33 : Systme de commande par ordinateur. .................................................................. 140Figure 6.34 : Schma blocs en z du systme. ............................................................................... 140Figure 6.35 : Schma blocs simplifi. ............................................................................................ 141Figure 6.36 : Schma blocs sous une forme qui permet le suivi de la trajectoire. .................. 142Figure 6.37 : Boucle de dynamique de l'erreur. ............................................................................ 143Figure 6.38 : Schma SIMULINK sans compensateur anticipatif. ........................................... 145Figure 6.39 : Rsultats de simulation sans le compensateur anticipatif. ................................... 146Figure 6.40 : Schma SIMULINK avec le compensateur anticipatif. ...................................... 146Figure 6.41 : Rsultats de simulation avec le compensateur anticipatif. .................................. 147Figure 6.42 : Erreur de suivi en prsence du compensateur anticipatif. .................................. 147Figure 6.43 : Erreur de suivi en prsence du compensateur anticipatif. .................................. 148Figure 7.1 : Schma blocs du compensateur polynomial ........................................................... 154Figure 7.2 : Systme quivalant dans le domaine de z. ............................................................... 155
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel x
Figure 7.3 : Systme quivalant. ..................................................................................................... 155Figure 7.4 : Schma de fonctionnement d'une presse mtal en feuille .................................. 160Figure 7.5 : Schma de blocs d'une presse mtal en feuille commande par un contrleur
polynomial. ............................................................................................................................... 160Figure 7.6 : Schma blocs en z. ...................................................................................................... 162Figure 7.7 : Premire transformation du schma blocs. ............................................................. 162Figure 7.8 : Deuxime transformation du schma blocs. ........................................................... 163Figure 7.9 : Dernire transformation du schma blocs. ............................................................. 163Figure 7.10 : Schma blocs SIMULINK du systme. ................................................................. 167Figure 7.11 : Rponse un chelon de 0.001m en considrant des conditions initiales de
0.005m. ..................................................................................................................................... 167Figure 7.12 : Schma blocs du compensateur polynomial augment dune intgrale ............ 168Figure 7.13 : Schma blocs quivalent dans le domaine de z. ................................................... 169Figure 7.14 : Schma blocs quivalent. ......................................................................................... 169Figure 7.15 : Schma blocs du compensateur polynomial accompagn du compensateur
anticipatif. ................................................................................................................................. 170Figure 7.16 : Systme quivalent dans le domaine de z. ............................................................. 171Figure 7.17 : Schma blocs quivalent. ......................................................................................... 171Figure 8.1 : Rgion de stabilit des systmes chantillonns ..................................................... 175Figure 8.2 : Ples de lexemple 8.2.1. ............................................................................................ 176Figure 8.3 : Schma-blocs de lexemple 8.2.2 ............................................................................... 177Figure 9.1 : Principe d'identification par moindre carr. ............................................................ 182Figure 9.2 : Identification d'un systme en fonction. .................................................................. 183Figure 9.3 : Systme inconnu dans une boucle de commande. ................................................. 186Figure 9.4 : Entres-sorties du systme inconnu. ........................................................................ 187Figure 9.5 : Schma SIMULINK pour valider le modle. ......................................................... 189Figure 9.6 : Sorties du systme inconnu et du modle d'ordre 1 identifi. .............................. 189Figure 9.7 : Sorties du systme inconnu et du modle d'ordre 2 identifi. .............................. 190Figure 9.8 : Schma blocs du systme. .......................................................................................... 191Figure 9.9: Schma blocs aprs l'annulation ple-zro. .............................................................. 191Figure 9.10 : Simulation du systme avec la nouvelle conception du compensateur. ............ 193Figure 9.11 : Sortie du systme avec la nouvelle conception du compensateur. .................... 194
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 1
CHAPITRE 1 Conversion et chantillonnage
des signaux
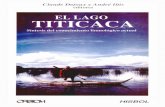
1.1 Introduction La notion de convertisseur numrique analogique (N/A) et analogique numrique (A/N)
est essentielle dans un cours dasservissement numrique (Phillips, 1995, page 111). En effet,
comme lindique la Figure 1.1, ces deux composants font partie de linterface qui est utilise
par lordinateur pour communiquer avec le procd commander. Le convertisseur A/N
est utilis pour transmettre le signal de sortie mesur de lappareil de mesure vers lordinateur
tandis que le convertisseur N/A est utilis pour transmettre le signal de commande de
lordinateur vers lentre du procd. Les convertisseurs sont synchroniss avec une horloge
qui oscille une frquence fixe appele frquence dchantillonnage. Les signaux des
convertisseurs sont donc chantillonns. La thorie des signaux chantillonns sera par
consquent brivement couverte dans ce chapitre. En particulier, nous verrons comment un
convertisseur A/N peut tre modlis laide dun simple chantillonneur et comment un
convertisseur N/A peut tre modlis laide dun mcanisme appel bloqueur dordre zro.
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 2
Figure 1.1 : Systme de commande par ordinateur
1.2 Convertisseur numrique analogique Le convertisseur numrique analogique N/A est utilis pour convertir les signaux
numriques (chantillonns) en signaux analogiques (continus) (Phillips, 1995, page 111).
Comme lindique la Figure 1.1, ce convertisseur sera gnralement utilis pour transmettre le
signal de commande calcul par lordinateur au procd physique qui doit tre contrl. Le
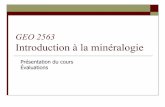
principe de fonctionnement du convertisseur N/A est illustr par la Figure 1.2. Dans le
schma lectrique de la Figure 1.2, les bits qui constituent lentre numrique en format
binaire sont nots de a0 an-1 o a0 est le bit le moins significatif (BMS) tandis que an-1 est le
plus significatif (BPS).
A/NAppareil
demesure
N/A Procd
Rf
ren
ce
Compensateur
Erre
ur
Com
man
de
Sorti
e
Mes
ure
Ordinateur Interface Procd et mesure
horloge
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 3
Figure 1.2 : Principe de fonctionnement du convertisseur N/A
Chaque bit de lentre binaire peut prendre la valeur zro ou un. Ainsi, chaque interrupteur
lectronique est en position gauche ou droite selon la valeur du bit correspondant ( gauche
si le bit est zro et droite sil est un). La tension de sortie de chaque interrupteur est
donc donne par la relation suivante :
1,,0pour niVaV Rii (1.1) Aussi, selon le schma lectrique du convertisseur, la sortie Vs du sommateur est donne par
la relation suivante:
1
0021 2
1242
n
iiinnnns VVR
RVR
RVR
RV (1.2)
En remplaant la relation (1.1) dans la relation (1.2), on obtient la sortie du convertisseur en
fonction de son entre et de la tension de rfrence VR :
1
0
1
0
1
02
21
221 n
i
iinR
n
i
n
iin
iRRiins aV
aVVaV (1.3)
On peut galement rcrire la sortie du convertisseur sous la forme suivante :
bRns EVV 21 (1.4)
o Eb est la reprsentation entire du nombre binaire lentre :
1
02
n
i
iib aE , (1.5)
+
-
R
2R 4R 2nR
an-2 a0
Vs
-VR
Sortie analogique
Rfrence
Entre numrique
an-1
Vn-1 Vn-2 V0
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 4
1.2.1 Rsolution du convertisseur La rsolution du convertisseur N/A est le plus petit incrment que la sortie peut subir pour
une tension de rfrence donne. Selon les relations (1.4) et (1.5), la rsolution en
pourcentage est donc obtenue en considrant le plus petit nombre binaire lentre; cest
dire (a0 = 1 et an-1 = an-2 = = a1 = 0) :
nR
s
VVrsolution
21%100
)min(%100 (1.6)
o n est le nombre de bits du convertisseur.
1.2.2 Valeur Maximum Une particularit importante des convertisseurs N/A est que leur sortie ne peut atteindre la
tension de rfrence VR. En effet, Selon les relations (1.4) et (1.5) la valeur maximum de Vs
est atteinte lorsque tous les bits de lentre sont 1 :
1
0
1221212
21)max(
n
i
nnR
inRs VVV
En multipliant de part et dautre par 2, on obtient
nRsn
nRs
nnR
nnR
nnRs
VVVV
VVVV
211)max(12
21)max(
1221221
21222
21)max(2 12
do
nRs VV 211)max( (1.7)
1.2.3 Gain du convertisseur N/A Le gain du convertisseur N/A peut facilement tre dduit partir de la valeur maximale de
sa sortie sur la valeur maximale de son entre :
nR
n
nR
ANV
VK
212211
/
(1.8)
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 5
1.2.4 Linarit du convertisseur La prcision du convertisseur dpend de la prcision des rsistances de son circuit lectrique
et de la perfection des caractristiques de lamplificateur oprationnel. On appelle linarit du
convertisseur, la diffrence maximale entre la valeur thorique (qui est calcule en
considrant des rsistances de prcision absolues et un amplificateur oprationnel idal) et la
valeur relle de la sortie du convertisseur divise par la tension de rfrence VR.
1.2.5 Circuit R-2R invers Pour amliorer la linarit du circuit de la Figure 1.2, on utilise souvent un circuit de
conversion R-2R invers illustr par la Figure 1.3 (Phillips, 1995, page 112). Les
caractristiques principales de ce circuit sont de nutiliser que des rsistances de valeur R et
2R et dassurer un courant constant travers la source de tension VR indpendamment de la
valeur de lentre. Ces caractristiques amliorent significativement la linarit du
convertisseur spcialement lorsquil est intgr dans une puce.
Figure 1.3 : Convertisseur R-2R invers
1.3 Convertisseur analogique numrique Le convertisseur analogique numrique A/N est utilis pour convertir les signaux
analogiques (continus) en signaux numriques (chantillonns) (Phillips, 1995, page 113).
Comme lindique la Figure 1.1, ce convertisseur sera gnralement utilis pour transmettre le
signal de mesure de la sortie du procd lordinateur. Il existe plusieurs mthodes de
conversion des signaux analogiques en signaux numriques. Parmi ces mthodes, la plus
usuelle est sans doute celle utilisant le principe dapproximation successive
+
-
R
2R
an-2 a0
Vs
-VR
Entre numriquean-1
R R 2R
2R 2R
Sortie analogique
Rfrence
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 6
1.3.1 Convertisseur approximation successive Le principe de fonctionnement du convertisseur A/N approximation successive est illustr
par la Figure 1.4. Dabord, lentre analogique Ve est compare la sortie du convertisseur
N/A Vs : Si Ve est suprieure Vs la sortie du comparateur est un un logique, si non, elle
est un zro logique. Bas sur cette comparaison, le registre approximation successive
(RAS) prend n coups dhorloge, partir du moment ou le signal de dbut de conversion est
vrai, pour excuter la conversion. Au premier coup dhorloge, la sortie numrique est remise
zro. Le dernier bit (le plus significatif) est alors plac un. Puis, selon la valeur de sortie
du comparateur, ce bit est maintenu un (si es VV ) ou remise zro (si Vs > Ve). Au deuxime coup dhorloge, lavant dernier bit est plac un. Puis, selon la valeur de sortie
du comparateur, ce bit est maintenu un (si es VV ) ou remise zro (si Vs > Ve). Ce mcanisme dapproximation successive se rpte jusquau bit le moins significatif. La
conversion seffectue donc en n coups dhorloge o n est le nombre de bits du convertisseur.
Figure 1.4 : Convertisseur approximation successive
+
-
ConvertisseurN/A n bits
Vs
Sortienumrique
VR
VeEntre
analogique
horlogeFin de laconversion
RAS
dbut de laconversion
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 7
Pour mieux comprendre le principe de fonctionnement de ce convertisseur, la Figure 1.5
montre un exemple de signaux associs un convertisseur approximation successive de 3
bits. Deux conversions sont ralises dans cet exemple : une avec une tension dentre de
3/8 VR et lautre avec une entre de 5/8 VR.
Figure 1.5 : Exemple de conversion d'un convertisseur 3 bits
1.3.2 Gain du convertisseur A/N Parce que la tension dentre du convertisseur A/N ne peut excder la tension maximale de
la sortie du convertisseur N/A soit nRV 2/11 et parce que la sortie du convertisseur A/N est un entier qui ne peut excder 2n - 1, le gain du convertisseur A/N est donn par la
relation suivante
horloge
2/8 VR
4/8 VR
0 VR
6/8 VR
VR
Dbut de la conversion
a2
a1
a0
Fin de laconversion
Ve Vs
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 8
Rn
nR
n
NA VVK 2
2/1112
/ (1.9)
1.3.3 Encodeur incrmental Certains signaux peuvent tre convertis du domaine continu au domaine discret sans utiliser
de convertisseur A/N. La position du rotor dun moteur en est un exemple. En effet il existe
plusieurs capteurs ddis mesurer la position du rotor dun moteur directement dans le
domaine numrique. Le moins dispendieux de ces capteurs est lencodeur incrmental (Kuo,
2010, page 195).
Lencodeur incrmental peut mesurer le dplacement angulaire du rotor dun moteur
lectrique. Le principe de fonctionnement de ce capteur est illustr par la Figure 1.6. Le
disque en rotation est branch mcaniquement avec le rotor du moteur. Ainsi, parce que les
disques renferment des rgions opaques et des rgions transparentes, selon la position du
rotor, les faisceaux lumineux peuvent ou ne peuvent atteindre les senseurs photolectriques.
Les signaux fournis par ces senseurs sont par consquents parfois une valeur maximum
lorsque la lumire passe et parfois une valeur minimum lorsque la lumire est bloque.
Connaissant le nombre de rgions transparentes sur les disques, le dplacement du rotor
peut tre obtenu en comptent le nombre de valeurs maximales du signal A ou du signal B.
Figure 1.6 : Encodeur incrmental
Sourceslumineurses
disque en rotation disque fixe
Senseursphotolectriques
A
B
Signal A
Signal B
90
rgiontransparente
rgionopaque
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 9
Comme lindique la Figure 1.6, les sources lumineuses et les senseurs A et B sont placs de
faon ce que les signaux provenant de ces capteurs soient en quadrature; cest dire,
dphass de 90 degrs. Cette particularit nous permet de dterminer le sens de rotation du
rotor. En effet, lorsque le rotor tourne dans un sens, le signal B est en avance sur le signal A
tandis que lorsquil tourne dans lautre sens, B est en retard sur A. Le dcodage des signaux
A et B peut donc se faire en utilisant un compteur branch sur le signal A ou B qui
sincrmente si B est en avance sur A et qui se dcrmente si B est en retard sur A. Pour
augmenter la prcision de la mesure par un facteur de quatre, il est galement possible de
compter tous les transitions des signaux A et B. Le gain du capteur est alors donn par :
rad2
tour14 tE NK (1.10)
o Nt est le nombre total de rgions transparentes sur les disques de lencodeur incrmental.
Le dsavantage de lencodeur incrmental est que la position mesure est toujours relative
la position du rotor du moteur au moment o le systme a subi une remise zro. Pour
contourner ce problme, il est frquent que lencodeur incrmental possde un troisime
signal produisant une impulsion une seule fois par tour. Ce signal peut alors nous permettre
de prvoir un mcanisme dinitialisation permettant de placer le rotor une position connue
lors de la remise zro. Il existe galement dautre type dencodeur permettant de fournir
directement la position du rotor du moteur et non son dplacement. Ces encodeurs
beaucoup plus dispendieux sont appels encodeurs absolus.
1.4 Convertisseur A/N et chantillonneur Comme lindique la Figure 1.7, le convertisseur A/N est synchronis avec une horloge ayant
une priode fixe T appele priode dchantillonnage. Le convertisseur excute les
conversions chaque priode dchantillonnage. Pour cette raison, le signal la sortie du
convertisseur nest valable qu ces priodes prcises. Ainsi, on dit que le signal de sortie du
convertisseur est chantillonn. Pour distinguer le signal dentre, on dit quil est continu.
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 10
Figure 1.7 : Convertisseur A/N synchronis avec une horloge
Comme le montre la Figure 1.8, pour modliser le convertisseur, on le spare en trois
parties : le gain; leffet de quantification et lchantillonnage.
Figure 1.8 : Modlisation du convertisseur A/N
Le gain du convertisseur peut facilement tre dtermin grce la relation (1.9) o (1.10)
lorsquil sagit dun encodeur incrmental. Le quantificateur quant lui limite le nombre de
valeur possible sa sortie. En effet, la sortie du convertisseur ne peut prendre de valeur des
intervalles plus petits que la rsolution du convertisseur. Ainsi, selon la relation (1.6), leffet
indsirable du quantificateur diminue rapidement lorsquon augmente le nombre de bit du
convertisseur. Pour cette raison, on nglige souvent le quantificateur dans le modle du
convertisseur. Lchantillonneur est un lment important du convertisseur : il reprsente le
passage du signal du monde continu (procd) au monde chantillonn (ordinateur).
Lchantillonneur est symbolis par un interrupteur qui se ferme brivement chaque
priode dchantillonnage. Comme lindique la Figure 1.9, cette symbolisation illustre bien la
transformation du signal continu f(t) en signal chantillonn f*(t).
ConvertisseurA/N
Sortiesignal chantillonn
Entresignal continu
Horloge
TEntresignal continu
Sortiesignal chantillonn
KA/N
Gain Quantificateur chantillonneur
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 11
Figure 1.9 : Symbole d'un chantillonneur
Pour bien comprendre le fonctionnement de lchantillonneur, la Figure 1.10 illustre le signal
de sortie de lchantillonneur correspondant un signal dentre donn (Kuo, 1980, page
54).
Figure 1.10 : Signaux l'entre et la sortie de l'chantillonneur
Le signal chantillonn f*(t) peut alors sexprimer mathmatiquement de la faon suivante :
0
)()()2()2()()()0()()(*k
kTfkTtTfTtTfTtfttf (1.11)
o (t) est une fonction de Dirac et f(t) est le signal continu. La relation (1.11) sera dune importance capitale lorsque viendra le temps de faire lanalyse des systmes chantillonns.
En effet, au Chapitre 3, la transforme de Laplace de la relation (1.11) permettra de dfinir la
transforme en z qui sera loutil par excellence pour lanalyser de ce type de systmes.
TEntresignal continu f(t) f*(t)
Sortiesignal chantillonn
Entresignal continu
Sortiesignal chantillon
f(t) f*(t)
t t
T
T 2T 3T 4T 5T 6T 7T0 T 2T 3T 4T 5T 6T 7T08T 8T
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 12
1.4.1 Thorme dchantillonnage En observant la Figure 1.10, on remarque que lorsquun signal est chantillonn, une partie
de linformation quil contient est perdu. Le thorme dchantillonnage permet de choisir la
priode dchantillonnage de faon viter la perte dinformation essentielle lors de
lchantillonnage. De faon gnrale, la transforme de Fourrier permet de transformer
nimporte quel signal continu en une somme de signaux sinusodaux. La Figure 1.11 illustre
un exemple de cette transformation dans lequel un signal continu est transform en une
somme de quatre signaux sinusodaux. Bas sur cette transformation, Shannon arrive la
conclusion que, pour ne pas perdre dinformation essentielle, un signal doit tre
chantillonn avec une priode dchantillonnage infrieure la moiti de la priode du
signal sinusodal de plus haute frquence. Il tablit donc la rgle suivante (Phillips, 1995,
1980, page 101) :
max21f
T (1.12)
o T est la priode dchantillonnage et fmax est la frquence la plus leve de la
dcomposition du signal en une somme de signaux sinusodaux. Ce rsultat est
communment appel thorme dchantillonnage.
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 13
Figure 1.11 : Exemple de transformation de Fourier d'un signal
1.4.1.1 Application du thorme dchantillonnage En pratique, le thorme dchantillonnage est souvent difficile appliquer de faon stricte.
En effet, la plupart des signaux qui existent dans notre monde sont constitus dune somme
infinie de signaux sinusodaux. Dans ce cas, la frquence fmax est infinie de sorte que la
priode dchantillonnage doit tre nulle, ce qui est videmment irralisable. Dans ce
contexte, on considre fmax non pas comme la frquence la plus leve de la somme des
-1
0
1
-0,5
0
0,5
-1
0
1
-0,2
0
0,2
-0,2
0
0,2
+
+
+
=
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 14
signaux sinusodaux mais la frquence du signal sinusodale partir duquel on considre que
lamplitude est ngligeable (Leigh, 1992, page 154). Par exemple, on sait quune fonction de
transfert de premier ordre de la forme suivante :
c
c
wsw
ssG 1
1)(
o wc = 1/ est la frquence de coupure en rad/s, une rponse en frquence telle quillustre par la Figure 1.12. une frquence de 4wc, lamplitude de la rponse est
denvirons 12 db soit le quart de lamplitude maximale. En gnrale, on considre que
lamplitude est ngligeable au-del de cette frquence. On pose donc
22
24
4max ccc wwff Ainsi, selon la relation (1.12), la priode dchantillonnage T doit tre choisie en respectant
lingalit suivante :
448
12
1
max
cc wff
T (1.13)
o fc est la frquence de coupure du systme de premier ordre en Hz, wc est sa frquence de
coupure en rad/s et est sa constante de temps en secondes. En utilisant les mmes arguments, on arrive la conclusion que la sortie dun systme de deuxime ordre de la
forme suivante :
222
2)(
nn
n
wswswsG
o on suppose que 1 , devrait tre chantillonne avec une priode dchantillonnage qui respecte le critre suivant :
nw
T4
o wn est la frquence naturelle du systme en rad/s et est son facteur damortissement. Lorsque plusieurs systmes sont cascads, on choisit normalement la priode
dchantillonnage en se basant sur le systme qui la bande passante la plus faible. Ainsi,
),min(4
,cjni
jiww
T (1.14)
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 15
Par exemple, pour le systme suivant:
4
1)( 2 sssG
on choisirait T de faon respecter lingalit suivante:
84
nwT
tandis que pour le systme suivant:
141)( 2 ssssG on choisirait plutt T de faon respecter lingalit suivante:
4)1,4min(4),min(4
cn wwT
Figure 1.12 : Rponse en frquence d'un systme de premier ordre
10-1 100 101-20
-15
-10
-5
0
20 lo
g(|G
(jw)|)
w/wc
4
-12
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 16
1.4.2 Filtre anti-repliement Pour viter que des signaux parasites des frquences plus leves que fmax dtriorent
linformation chantillonne par le convertisseur A/N, on ajoute souvent un filtre passe-bas
son entre. Ce filtre est communment appel filtre anti-repliement (Leigh, 1992, page 12).
1.5 Conversion N/A et bloqueur dordre zro Comme lindique la Figure 1.13, le convertisseur N/A est synchronis avec une horloge
ayant une priode dchantillonnage T. chaque priode dchantillonnage, le convertisseur
transforme le signal du monde chantillonn (ordinateur) au monde continu (procd).
Comme pour le convertisseur A/N, le convertisseur N/A peut se modliser laide de trois
sous-systmes : un filtre; un gain et un quantificateur. La Figure 1.14 illustre se modle.
Figure 1.13 : Convertisseur N/A synchronis avec une horloge
Le gain du convertisseur peut facilement tre dtermin grce la relation (1.8). Comme
pour le convertisseur A/N, le quantificateur peut la plupart du temps tre nglig.
Figure 1.14 : Modlisation du convertisseur N/A
ConvertisseurN/A
Entresignal chantillonn
Sortiesignal continu
Horloge
Entresignal chantillonn
Sortiesignal continu
KN/A
Filtre Quantificateur Gain
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 17
Le filtre doit pour sa part transformer le signal chantillonn en signal continu. Il joue donc
le rle inverse de lchantillonneur. Selon Shannon, un signal chantillonn en respectant le
critre du thorme dchantillonnage peut tre parfaitement transform en un signal
continu dorigine laide dun filtre ayant la rponse en frquence illustre par la Figure 1.15
(Kuo, 1980, page 62). Un tel filtre est videmment irralisable.
Figure 1.15 : Filtre idal pour la transformation d'un signal chantillonn en signal
continu.
En ralit, le filtre qui est utilis en pratique pour transformer le signal chantillonn en
signal continu est le bloqueur dordre zro (Kuo, 1980, page 66). chaque priode
dchantillonnage, le bloqueur mmorise la donne son entre, la transfert sa sortie et la
maintient jusqu la prochaine priode dchantillonnage. La Figure 1.16 illustre le
fonctionnement du bloqueur dordre 0.
Figure 1.16 : Fonctionnement du bloqueur d'ordre 0
f (Hz)12T
1
|Filtre(j2f)|
Sortiesignal continu
f(t)
tT 2T 3T 4T 5T 6T 7T0 8T
Entresignal chantillon
f*(t)
tT 2T 3T 4T 5T 6T 7T0 8T
B0
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 18
Le bloqueur dordre 0 est en ralit une partie intgrante du convertisseur N/A qui est
ralise grce un registre qui garde la valeur convertir entre chaque priode
dchantillonnage. Le modle du convertisseur N/A usuel prend donc la forme illustre par
la Figure 1.17.
Figure 1.17 : Modle d'un convertisseur N/A usuel
1.5.1 Fonction de transfert du bloqueur dordre 0 Comme le montre la Figure 1.16, le bloqueur dordre 0 transforme le signal chantillonn en
signal continu mais ne reconstitue pas le signal continu dorigine. Pour cette raison, nous
devront dans les chapitres qui suivent toujours en tenir compte. Ainsi, nous allons
maintenant obtenir le modle du bloqueur dordre 0 dans le domaine de Laplace. Pour ce
faire, nous allons appliquer la dfinition mme dune fonction de transfert soit, la
transforme de Laplace de la sortie du systme sur la transforme de Laplace de son entre.
La Figure 1.18 montre la sortie du bloqueur dordre 0 lorsquune impulsion est applique
son entre.
Figure 1.18 : Rponse impulsionnelle du bloqueur dordre 0
La sortie du bloqueur peut alors tre exprime mathmatiquement de la faon suivante :
)()()( Ttututy
Entresignal chantillonn
Sortiesignal continu
KN/A
Bloqueurd'ordre 0
Quantificateur Gain
B0
t0
B0
t0 T
Entree(t)
Sortiey(t)
(t)11
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 19
o u(t) est la fonction chelon. La fonction de transfert du bloqueur dordre 0 est alors
donne par :
)()()()()(
)()()(0 TtuLtuLtL
TtutuLteLtyLsB (1.15)
En utilisant la proprit du retard de la transforme de Laplace, la fonction de transfert du
bloqueur dordre 0 prend la forme suivante (Kuo, 1980, page 67) :
seuLetuLsB
TsTs
1)()(0 (1.16)
1.5.2 Rponse en frquence du bloqueur dordre 0 La rponse en frquence du bloqueur dordre 0 peut tre obtenue en remplaant s par j2f dans la fonction de transfert du bloqueur (Kuo, 1980, page 68). La Figure 1.19 illustre cette
rponse compare celle du filtre de transformation de signaux chantillonns en signaux
continu idal. Cette figure nous montre une diffrence significative entre la rponse du filtre
idal et celle du bloqueur. Cette diffrence nous montre de nouveau limperfection de la
reconstruction du signal continu laide du bloqueur 0 et nous incite encore davantage
prendre en compte le bloqueur dordre 0 dans les chapitres suivants.
Figure 1.19 : Rponse en frquence d'un filtre de transformation dun signal
chantillonn en signal continu idal et du bloqueur d'ordre 0
|Filtre idal( j2f )|
|B0( j2f )|
12T
1T
32T
2T
52T
3T
f (Hz)
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 20
CHAPITRE 2 Transforme en z
2.1 Introduction La transforme de Laplace est gnralement utilise pour faire lanalyse des systmes
dynamiques continus linaires paramtres invariants. En principe, elle pourrait galement
ltre pour faire lanalyse des systmes linaires chantillonns. Cependant, la transform de
Laplace des signaux chantillonns donne lieu des sommes infinies de fonctions
exponentielles, ce qui alourdit considrablement les manipulations. Pour palier ce
problme, on dfinit la transforme en z qui permet danalyser beaucoup plus facilement les
systmes de commande chantillonns. Dans ce chapitre nous verrons que la transforme en
z peut-tre utilise pour analyser des systmes comprenant non seulement des sous systmes
discret mais galement des sous-systmes continus et des chantillonneurs. La mthode pour
analyser ce type de systme hybride consistera transformer les diffrents sous-systmes
dans le domaine discret de faon obtenir un systme quivalent entirement transform
dans le domaine de z. Des schmas blocs comportant uniquement des fonctions de transfert
dans le domaine de z pourront alors tre manipuls avec les mmes rgles que ceux
comportant uniquement des fonctions de transfert dans le domaine de s.
2.2 Dfinition de la transforme en z Comme nous lavons dj mentionn dans le chapitre prcdant (quation 1.11), un signal
chantillonn )(* tf peut toujours sexprimer sous la forme suivante
0
* )()()(n
nTfnTttf (2.1)
o f(t) est le signal continu, (t) est une impulsion de dirac et T est la priode dchantillonnage. En gnral, dans le domaine de la commande continue et
chantillonne, on suppose que les signaux considrs sont causaux; cest dire que
les signaux sont nuls lorsque le temps est ngatif ( f(t) = 0 si t < 0 ). Dans le texte qui
suit, cette hypothse sera maintenue moins quil en soit prcis autrement. En prenant la
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 21
transforme de Laplace de part et dautre de la relation (2.1), on obtient le signal
chantillonn dans le domaine de Laplace qui sexprime de la faon suivante :
00
** )()()()()()(nn
nTfnTtLnTfnTtLtfLsF
Grce la proprit du retard de la transforme de Laplace, ce signal devient (Kuo, 1980,
page 78) :
0
** )()()(n
nTsenTftfLsF (2.2)
La relation (2.2) est gnralement lourde utiliser puisquelle renferme une somme infinie de
fonctions exponentielles. Pour allger les manipulations associes cette relation, on dfinit
la variable complexe z de la faon suivante (Kuo, 1980, page 79) :
Tsez (2.3) Cette transformation complexe peut galement tre inverse de faon exprimer s en
fonction de z de la faon suivante
)ln(1 zs T (2.4) La transforme en z est alors dfinie par la relation suivante (Kuo, 1980, page 79):
)ln(
*1
)()()(zs T
tfLzFtfZ (2.5) o Z est loprateur de la transforme en z. En remplaant la relation (2.2) dans la relation
(2.5), la transforme en z peut galement sexprimer sous la forme suivante :
0
)()()(n
nznTfzFtfZ (2.6)
La relation (2.6) reprsente une srie de puissance qui peut tre rsolue sous certaines
conditions. cette fin, le paragraphe suivant prsente un bref rappel sur la rsolution des
sries gomtriques.
2.3 Srie gomtrique De faon gnrale, la srie gomtrique se prsente sous la forme suivante :
0
21n
nrrrS (2.7)
o r est une variable complexe. Si la condition suivante est vrifie,
1r (2.8)
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 22
o r est le module de r, alors, la srie gomtrique comme solution la relation suivante
(Kreyszig, 1988, page 187) :
r
S 11 (2.9)
En effet, parce que 1r , 0lim n
nr . Ainsi,
111 3232 SrrrrrrrS do la relation (2.9).
2.4 Quelques exemples de transforme en z Considrons maintenant quelques exemples de transforme en z que nous solutionnerons en
utilisant la srie gomtrique.
Exemple 2.4.1 : Transforme en z de atetf )( Selon la dfinition de la transforme en z donne par la relation (2.6),
0
1
0 n
naT
n
nanTat zezeeZ
Cette relation reprsente une srie gomtrique de la forme de celle donne par la relation
(2.7) avec 1 zer aT . La solution de cette srie, donne par la relation (2.9), nous permet alors dobtenir la transforme en z sous la forme rationnelle suivante :
aTaTat ez zzeeZ 11 1 condition que 11 ze aT ou de faon quivalante condition que aTez . La rgion dfinie par aTez est appele rgion de convergence. Cette notion ne sera pas considre dans le cadre de ce cours. Dans les exemples suivants, cette condition ne sera pas prise en
compte.
Exemple 2.4.2 Transforme en z de attetf )( Selon la dfinition de la transforme en z donne par la relation (2.6),
211
0
1
0
2 zeTzeTzenTznTeteZ aTaTn
naT
n
nanTat
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 23
En multipliant de part et dautre par 1 ze aT , on obtient
31211 2 zeTzeTteZze aTaTataT
En faisant la soustraction des deux dernires relations, nous obtenons
0
121111n
naTaTaTataT zeTTzeTzeTteZze
Le membre de droite de cette relation reprsente une srie gomtrique de la forme de celle
donne par la relation (2.7) avec 1 zer aT . La solution de cette srie, donne par la relation (2.9), nous permet alors dobtenir la relation suivante :
111111 1111
ze
zTeze
TzTeTze
TTteZze aTaT
aT
aT
aTataT
do
2211
1 aTaT
aT
aTat
ezzTe
zezTeteZ
Exemple 2.4.3 Transforme en z de )sin()( wttf Selon lidentit de Euler,
jeewt
jwtjwt
2)sin(
Ainsi, selon la dfinition de la transforme en z donne par la relation (2.6),
0
1
0
1
0 21
2)()sin(
n
njwT
n
njwT
n
nnjwTnjwT
zezej
zjeewtZ
Cette relation reprsente une somme de deux sries gomtriques de la forme de celle
donne par la relation (2.7) avec 1 zer jwT et 1 zer jwT . La solution de ces sries, donne par la relation (2.9), nous permet alors dobtenir la transforme en z sous la forme
rationnelle suivante :
21
1
21
1
11
11
11
)cos(21)sin(
2/21)2/(
1111
21
11
11
21)sin(
zwTzzwT
zeezjeez
zezezeze
jzezejwtZ
jwTjwT
jwTjwT
jwTjwT
jwTjwT
jwTjwT
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 24
Finalement, en multipliant au numrateur et au dnominateur par z2, on obtient,
1)cos(2
)sin()sin( 2 wTzzzwTwtZ
Exemple 2.4.4 Transforme en z de atmettf )( Sachant que
matmatm aeettf )( , lapplication de la transforme en z donne par la relation (2.6) nous donne
atmmnn
anTm
mn
nm
anTmatm eZ
aze
az
aeetZ
00
Selon le rsultat de lexemple 2.4.1, on obtient finalement
aTmmatm ez zaetZ
2.5 Transforme en z de fonctions de transfert en s Lorsque viendra le temps de faire lanalyse des systmes hybrides renfermant des fonctions
de transfert continues et discrtes, il sera avantageux de transformer les fonctions de
transfert continues en fonctions de transfert discrtes (Kuo, 1980, page 103). Il sera donc
trs utile dappliquer la transforme en z directement sur des fonctions de transfert dans le
domaine de Laplace. Un abus de langage est alors couramment utilis. En effet, pour tre
consistant avec la dfinition de la transforme en z dcrite par la relation (2.5), la
transforme en z dune fonction de transfert en s devrait se faire en utilisant la notation
suivante :
)()()( 1 sFLZtfZzF (2.10) o L-1 est loprateur de la transforme inverse de Laplace. Mais pour simplifier lcriture, on
utilise souvent la notation suivante :
)()( sFZzF (2.11) en gardant toujours lesprit que cest la dfinition dcrite par la relation (2.10) qui doit tre
applique. Parce que la transformation des fonctions de transfert du domaine de s celui de
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 25
z passe par une transforme de Laplace inverse, il est souvent souhaitable dutiliser des
fractions partielles pour effectuer cette opration.
2.5.1 Fractions partielles pour des ples simples Soit une fonction de transfert dans le domaine de s donne par la relation suivante :
)()()(
sDsNsF (2.12)
o N(s) est le numrateur et D(s) est le dnominateur de la fonction de transfert. Si les ples
de F(s) sont donns par 1, 2, , k, une dcomposition en fractions partielles permet de rcrire la fonction de transfert sous la forme suivante (Phillips, 1995, page 662) :
1 211 2
( )( ) ( ) ( ) ( )
kk n
nk n
K K K KF ss s s s
o
nsnn
sFsK )()( (2.13) La transforme en z de F(s) est alors donne par la relation suivante
k
n n
nk
n n
n
sKLZ
sKLZzF
1
1
1
1
)()()(
Sachant que
tnn
n neKs
KL
1 ,
et sachant que selon le rsultat de lexemple 2.4.1, la transforme en z de tne est donn par
Tt nn ez zeZ Il sensuit que la transforme en z de F(s) est donne par la relation suivante :
k
nT
nnez
zKsFZ1
)( (2.14)
Exemple 2.5.1
Obtenons la transforme en z de la fonction de transfert suivante :
)2)(1(
1)( sssF
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 26
Pour se faire, trouvons dabord les ples de F(s). En solutionnant lquation caractristique
suivante
0)2)(1()( sss on trouve les ples suivants :
1 = -1 et 2 = -2 Les ples sont donc simples ce qui nous permet dutiliser les quations (2.13) et (2.14) pour
obtenir la transforme en z. Ainsi,
TTn
Tn
ezzK
ezzK
ezzKzFsFZ
n 221
2
1)()(
o selon la relation (2.13),
12
1)2)(1(
1)1()()(11
111
sss sss
ssFsK
11
1)2)(1(
1)2()()(22
222
sss sss
ssFsK
La transforme en z est donc donne par la relation suivante :
TTTT
TT
TT
TT ezezeez
ezezezzezz
ezz
ezzzFsFZ 2
2
2
2
2)()(
2.5.2 Fractions partielles pour des ples multiples Soit la fonction de transfert ples multiples suivante :
)()()(
sDsNsF (2.15)
o N(s) est le numrateur et D(s) est le dnominateur de la fonction de transfert. Si les ples
de F(s) sont donns par 1, 2, , k avec respectivement les multiplicits m1, m2, , mk, une dcomposition en fraction partielle permet de rcrire la fonction de transfert
sous la forme suivante (Phillips, 1995, page 663) :
k
p
m
mm
p
pmp
sK
sF1 1
)(
o
p
p
p
p
s
mpmm
mm
ppm sFssmm
K
)()()!(1 (2.16)
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 27
La transforme en z de F(s) est alors donne par la relation suivante
k
p
m
mm
p
pmk
p
m
mm
p
pmpp
sK
LZs
KLZzF
1 1
1
1 1
1
)()()(
Sachant que
tmpmmppm net
mK
sK
L 11
)!1(
,
et sachant que selon lexemple 2.4.4,
aTmmatm ez zaetZ Nous avons
k
p
m
mTm
p
mpm
p
pezz
mK
zF1 1
1
1
)!1()( (2.17)
Exemple 2.5.2
Obtenons la transforme en z de la fonction de transfert suivante :
)2(
1)( 2 sssF
Pour se faire, trouvons dabord les ples de F(s). En solutionnant lquation caractristique
suivante
0)2()( 2 sss on trouve les ples
1 = 0, 1 = 0 et 2 = -2 Parce quil y a un ple double 0 (m1 = 2) et un ple simple 2 (m2 = 1), on doit utiliser les
quations (2.16) et (2.17) pour obtenir la transforme en z de F(s). Ainsi,
TTTp
m
mTm
p
mpm
ezzK
ezzK
ezzK
ezz
mK
zFp
p 211 211
1211
2
1 11
1
)!1()(
O
41212121)()( 0200222111 1
ssss ssssss
ssFs
sK
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 28
212121)()( 00222112 1
sss sss
ssFsK
411
212)()(
22
22221 2
sss sss
ssFsK
et o
22
1 1
111
1 T
TTT
T ezzTeTeezz
ezz
La transforme en z de F(s) est donc donne par la relation suivante :
TTTT
T
TTT
T
TT
T
ezzzTeezeT
ezzzzzzezTzezez
ezzzzezzTezzz
ezz
zzT
zzzF
22
2212
41
4122
41
41
21
22
234122
212223
41
22
2412
212
41
22
1
121
111
41
121
141)(
2.6 Utilisation des tables Quil sagisse de faire la transforme en z dune fonction dans le domaine du temps ou dans
celui de Laplace, il est gnralement plus simple dutiliser une table de transforme en z que
dappliquer la dfinition. Le Tableau 2-1 prsente un exemple de table de transforme en z
que vous pouvez utiliser. videmment, pour pouvoir obtenir une transforme en z partir
dune table, il faut que la fonction que lon souhaite transformer existe dans cette table.
Mme si cette fonction existe, on doit souvent lexprimer diffremment pour quelle
corresponde prcisment avec la table, en particulier lorsquon souhaite transformer une
fonction du domaine de s celui de z.
Exemple 2.6.1
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 29
Utilisons la table de transforme en z du Tableau 2-1 pour obtenir la transforme en z de la
fonction suivante :
1)( 2 ssKsF
En observant la table, on remarque que la fonction transforme correspond lentre 9.
On constate galement que cette fonction doit tre rcrite pour corresponde prcisment
celle de la table :
/1/1)( 2 ssKsF
Ainsi,
/1/1
/1/1)()( 22 ss
KZss
KZsFZzF
La transforme en z correspond maintenant exactement avec lentre 9 de la table si on
considre que /1a . La transforme en z de F(s) est donc donne par la relation suivante :
T
TTT
ezzTeezeTzKzF
2
///
1)(
Exemple 2.6.2
Utilisons la table de transforme en z du Tableau 2-1 pour obtenir la transforme en z de la
fonction suivante :
1,2)( 222
nnn
wswsswsF
Parce que 1 , les ples du facteur de deuxime ordre sont complexes. Ainsi, pour faire la correspondance avec la table, on doit dabord faire la compltion du carr. Pour se faire, on
pose lgalit suivante :
2222222 22 nn wswswaasswas
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 30
de sorte que
nwa 222222 1 nnn wawwwaw
La fonction de transfert prend alors la forme suivante :
2222
)(wass
awsF
qui correspond exactement lentre 16 de la table. La transforme en z de F(s) est donc
donne par la relation suivante :
TwnTw nn ezTwezz BAzz 222 1cos21 o
21
2 1sin1cos12
TweTweA nTwnTw nn
221
2 1cos1sin2
TweTweeB nTwnTwTw nnn
2.7 Proprits de la transforme en z Il existe plusieurs proprits associes la transforme en z. Ces proprits permettent non
seulement de faciliter lobtention de certaines transformes en z mais galement de faciliter
lanalyse du comportement des systmes chantillonns. En particulier, le thorme de la
valeur finale sera souvent utilis pour analyser le comportement dun systme chantillonn
en rgime permanent sans avoir faire de transforme en z inverse. Les proprits que nous
vous prsentons maintenant sont notre avis les plus usuelles (Kuo, 1980, page 95).
Proprit 1 : Addition et soustraction
)()()()( 2121 tfZtfZtftfZ
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 31
Dmonstration La dmonstration est vidente si on applique la dfinition de la transforme
en z donne par la relation (2.6). En effet,
)()()()()()()()( 210
20
10
2121 tfZtfZznTfznTfznTfnTftftfZn
n
n
n
n
n
Proprit 2 : Multiplication par une constante
)()( tfaZtafZ Dmonstration Une fois de plus la dmonstration se fait en appliquant directement la
dfinition de la transforme en z donne par la relation (2.6) :
)()()()(00
tfaZznTfaznTaftafZ nn
n
n
Proprit 3 : Translation (Retard)
)()(1 tfZztfZz
nTtfZ nn
Dmonstration En appliquant la dfinition de la transforme en z donne par la relation
(2.6), on obtient
)(00
)()()( nknk
k
kzznTkTfznTkTfnTtfZ
On considre ensuite le changement dindice m = k n de sorte que
mnm
nmn
nmzmTfzzzmTfnTtfZ
)()()(
Finalement, parce que f(t) = 0 si t < 0,
)()()(0
tfZzzmTfznTtfZ nmm
n
Proprit 4 : Translation complexe
aTzezat tfZtfeZ )()( Dmonstration En appliquant la dfinition de la transforme en z donne par la relation
(2.6), on obtient
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 32
aTzeznaTn
n
n
anTat tfZzenTfznTfetfeZ
)()()()(
00
Proprit 5 : Thorme de la valeur finale
)(1lim)(lim1
zFz
zkTfzk
Dmonstration Considrons les squences suivantes :
n
k
nk znTfzTffzkTf0
1 )()()0( (2.18)
n
k
nk zTnTfzTfzfTfzTkTf0
21 )()()0()(
Puis, parce que f(t) = 0 si t < 0,
n
k
nk zTnTfzTfzfzTkTf0
21 )()()0( (2.19)
En comparant (2.18) et (2.19), on trouve que
1
00
1n
k
kn
k
k zkTfzzTkTf
de sorte quen prenant la diffrence entre (2.18) et (2.19) avec z se rapprochant de 1, on
obtient
1
00
1
00
1
1)(lim
n
k
n
k
n
k
kn
k
k
znTfkTfkTfzkTfzzkTf
Si on considre maintenant que n tend vers linfini,
)(limlimlim 100
1
1nTfzkTfzzkTf
n
n
k
kn
k
k
zn
En permutant les limites, on obtient finalement,
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 33
)(1lim)(1limlimlimlim)(lim
1
1
100
1
1
1
00
1
1
zFz
ztfZzzkTfzzkTf
zkTfzzkTfnTf
zzk
k
k
k
z
n
k
kn
k
k
nzn
Exemple 2.7.1
Trouvons la transforme en z du signal suivant
)2(1)( /)2( Ttuetf sTt Ce signal, illustr par la Figure 2.1, peut tre rcrit sous la forme suivante
/1)(,)2()( tetgTtgtf de sorte quen utilisant la Proprit 3 et lentre 8 de la table de transforme en z du Tableau
2-1, on obtient
/
/
/
/
22 11
111)(1)2()( T
T
T
T
ezzze
ezzze
ztgZ
zTtgZtfZ
Remarquez que le dlai ne fait quaugmenter lordre de la fonction de transfert obtenue; il
nintroduit pas de fonction non rationnelle. Cette caractristique des systmes chantillonns
est trs avantageuse par rapport aux systmes continus. En effet, selon la proprit du retard
de la transforme de Laplace, la transforme de Laplace du signal f(t) est donne par la
relation suivante :
assaetgLetfL TsTs
22 )()(
Cette relation contient une fonction non rationnelle qui est gnralement difficile
manipuler. cause de cette caractristique, lanalyse des systmes avec retard est
gnralement beaucoup plus simple dans le domaine chantillonn que dans le domaine
continu.
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 34
Figure 2.1 : Signal avec retard
Exemple 2.7.2
La transforme en z du signal de lexemple 2.7.1 est donne par la relation suivante :
/
/
11)( T
T
ezzzezF
On veut obtenir la valeur en rgime permanent de ce signal sans avoir faire une
transforme en z inverse pour obtenir le signal dans le domaine du temps. Pour ce faire, il
suffit simplement dutiliser le thorme de la valeur finale donne par la Proprit 5. Ainsi,
11lim111lim)(1lim)(lim /2/
1/
/
11
T
T
zT
T
zzk ezze
ezzze
zzzF
zzkTf
Ce rsultat peut facilement tre confirm en observant la Figure 2.1 qui illustre le signal F(z)
dans le domaine du temps.
f(t)
t2T
0,63
1,00
2T+
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 35
2.8 Transforme en z du bloqueur dordre zro Dans le prochain paragraphe, la transformation des schmas-blocs hybrides en schmas-
blocs impliquant que des fonctions de transfert en z sera prsente. Cette transformation
sera alors utilise pour transformer des systmes de commande chantillonns faisant
gnralement intervenir un convertisseur N/A et un procd dans le domaine continu. Lors
de cette transformation, nous aurons trs souvent faire la transforme en z dun procd
prcd dun bloqueur dordre zro. Pour cette raison, nous allons maintenant utiliser
certaines proprits de la transforme en z pour simplifier ce calcul. Selon la relation (1.16),
la transforme en z dune fonction de transfert G(s) prcd dun bloqueur dordre zro
Bo(s) est donne par la relation suivante :
)(1)()( sG
seZsGsBoZ
Ts
Selon la Proprit 1 de la transforme en z,
ssGeZ
ssGZsGsBoZ Ts )()()()(
Puis, selon la Proprit 3 de la transforme en z et la proprit du retard de la transforme de
Laplace,
ssGZ
zssGZsGsBoZ )(1)()()(
do (Kuo, 1980, page 108)
ssGZ
zzsGsBoZ )(1)()( (2.20)
2.9 Transformation des schmas blocs hybrides Les systmes linaires de commande continus sont souvent prsents sous forme de
schmas blocs forms dun ensemble de blocs reprsentant chacun une fonction de transfert
dans le domaine de Laplace. Lalgbre des blocs peut alors tre utilise pour manipuler et
analyser ces schmas. Lorsquil sagit de systmes linaires de commande chantillonns, le
schma blocs renferme gnralement des fonctions de transfert continues (convertisseur
numrique analogique, procd commander et mesure), des fonctions de transfert
discrtes (compensateur) et des chantillonneurs (convertisseur analogique numrique). Ce
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 36
type de systme est appel hybride parce quil contient des signaux continus et
chantillonns. La Figure 2.2 illustre un tel systme dans lequel les gains des convertisseurs
ont t incorpors dans le procd et la mesure et les quantificateurs ont t ngligs.
Figure 2.2 : Schma blocs dun systme hybride.
Lanalyse de ce type de systme dans sa forme hybride est relativement complexe. En effet,
lalgbre des blocs ne peut gnralement pas tre utilise pour manipuler ces systmes. Pour
cette raison, il est souvent prfrable de transformer les systmes hybrides de faon ce
quils sexpriment entirement dans le domaine chantillonn. videmment, seules les
variables chantillonnes feront alors partie intgrante du schma blocs transform.
Lavantage de cette mthodologie est que lalgbre des blocs peut alors tre applique sans
restriction.
La transformation des schmas blocs hybrides en schma blocs dans le domaine
chantillonn utilise une seule transformation de base (Kuo, 1980, page 104-105). Pour
obtenir cette transformation, considrons dabord le systme hybride lmentaire illustr par
la Figure 2.3.
Gp(s)R* E*
+-
M*Gc(z)
CBo(s)
H(s)T
Procd
Mesure
ConvertisseurN/A
ConvertisseurA/N
CmCm*
Compensateur
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 37
Figure 2.3 : Systme hybride de base
Dans ce systme, le signal C(s) peut sexprimer de la faon suivante :
00
)()()()()(*)()(n
nTs
n
nTs sGenTfenTfsGsFsGsC
Trouvons le signal C dans le domaine du temps :
0
1
0
11 )()()()()()(n
nTs
n
nTs sGeLnTfsGenTfLsCLtc
La proprit du retard de la transforme de Laplace nous permet alors dcrire :
0
1 )()(,)()()(n
sGLtgnTtgnTftc
Le signal chantillonn C*(s) peut alors sexprimer de la faon suivante :
0 00 00
)()()()()()(*n k
kTs
k
kTs
nk
kTs nTkTgnTfeenTkTgnTfekTcsC
Puis, en posant le changement dindice r = k n, on obtient,
00
)( )()()()()(*n nr
rTsnTs
n nr
Tsnr rTgenTferTgnTfesC
Parce que g(t) = 0 si t < 0, il sensuit que
0 00 0
)()()()()(*n r
rTsnTs
n r
rTsnTs rTgenTferTgenTfesC
Ainsi, selon la dfinition dun signal chantillonn,
)(*)(*)(* sFsGsC
G(s)T
ConvertisseurA/N
C(s) C*(s)F*(s)
-
Pascal Bigras, cole de technologie suprieure, GPA-783-Asservissement numrique en temps rel 38
En appliquant la dfinition de la transforme en z dcrite par la relation (2.5), on obtient
finalement la transformation de base dun systme hybride un systme chantillonn :
)()()(*)(*
)(*)(*)(*)(*)(
)ln()ln(
)ln()ln()ln(
11
111
zFzGsFsG
sFsGsCtcLzC
zszs
zszszs
TT
TTT
o
)()(*)()ln(1
sGZsGzGzs T
Cette transformation est illustre par la Figure 2.4.
Figure 2.4 : Transformation de base.
2.9.1 Procdure de transformation des systmes hybrides Llment de base pour transformer les schmas-blocs hybrides en schma-blocs comportant
uniquement des fonctions de transfert en z est videmment la transformation illustre par la
Figure 2.4. Il faut cependant remarquer que dans le schma-blocs transform, seuls les
signa