Loi entrée sortie Sciences - s2i.chaptal.free.frs2i.chaptal.free.fr/SI/S5/C1.pdf · Le champ des...
13
LYCEE CHAPTAL COURS PTSI Séquence 5 Comportement cinématique des systèmes CPGE PTSI/PT* Classe entière B1 - Justifier ou choisir les grandeurs nécessaires à la modélisation B2 - Proposer un modèle C – Résoudre D1 - Découvrir le fonctionnement d’un système complexe D3 - Mettre en œuvre un protocole expérimental et vérifier sa validé 2h 2017/2018 Loi entrée sortie Sciences Industrielles pour l’Ingénieur
Transcript of Loi entrée sortie Sciences - s2i.chaptal.free.frs2i.chaptal.free.fr/SI/S5/C1.pdf · Le champ des...

LYCEE CHAPTAL
COURS
PTSI
Séquence 5
Comportement cinématique des
systèmes
CPGE
PTSI/PT*
Classe
entière
B1 - Justifier ou choisir les grandeurs nécessaires à la modélisation B2 - Proposer un modèle C – Résoudre D1 - Découvrir le fonctionnement d’un système complexe D3 - Mettre en œuvre un protocole expérimental et vérifier sa validé
2h
2017/2018
Loi entrée sortie
Sciences Industrielles
pour l’Ingénieur

CPGE PTSI S2I Loi entrée sortie
Page1sur13
Sommaire I Modélisationdespiècespardes«solidesparfaits»......................................................................3
II Modélisationdesliaisons................................................................................................................3
II.1 Définitiond’uneliaisonparfaite..............................................................................................3
II.2 Repèreassociéàuneliaison....................................................................................................3
II.3 Degrédelibertéd’uneliaison.................................................................................................4
II.4 Torseurscinématiquesdesliaisons.........................................................................................4
II.4.1 Définition.........................................................................................................................4
II.4.2 Tableaurécapitulatif.......................................................................................................4
II.4.3 Formescanoniques:justificationdedeuxexemples......................................................7
III Liaisonscinématiquementéquivalentes.........................................................................................7
III.1 Définitiond’uneliaisonéquivalente........................................................................................7
III.2 Liaisonsensérie......................................................................................................................8
III.3 Liaisonsenparallèle................................................................................................................9
IV Loientréesortied’unmécanisme.................................................................................................11
IV.1 Définitiond’uneloi«entrée-sortie»....................................................................................11
IV.2 Classificationdeschaînescinématiques................................................................................11
IV.3 Déterminationd’uneloientréesortie:.................................................................................12
CPGE PTSI S2I Loi entrée sortie
Page2sur13
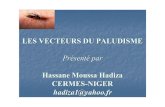
Compétencesviséesparlaséance
B1 - Justifier ou choisir les grandeurs nécessaires à la modélisation
B11 - Identifier paramètres entrée/sortie cinématique
B2 - Proposer un modèle B222 - Définir les ddl d'un solide B223 - Paramétrer un mécanisme simple B224 - Modéliser la cinématique d'un solide (trajectoire, torseur cinématique, accélération) B225 - Modéliser les liaisons entre solides
C – Résoudre C1 - Déterminer un champ des vecteurs vitessesC8 - Paramétrer un solveur numérique C2 - Déterminer une loi E/S
D1 - Découvrir le fonctionnement d’un système complexe
D11 - Mettre en œuvre un système D12 - Repérer les composants du système D13 - Identifier les grandeurs de flux et d'effort
D3 - Mettre en œuvre un protocole expérimental et vérifier sa validé
D31 - Mettre en œuvre un environnement recréé D32 - Évaluer et commenter les écarts entre les résultats expérimentaux avec l’ordre de grandeurs des résultats attendus (simulés ou définis au cahier des charges)
Introduction
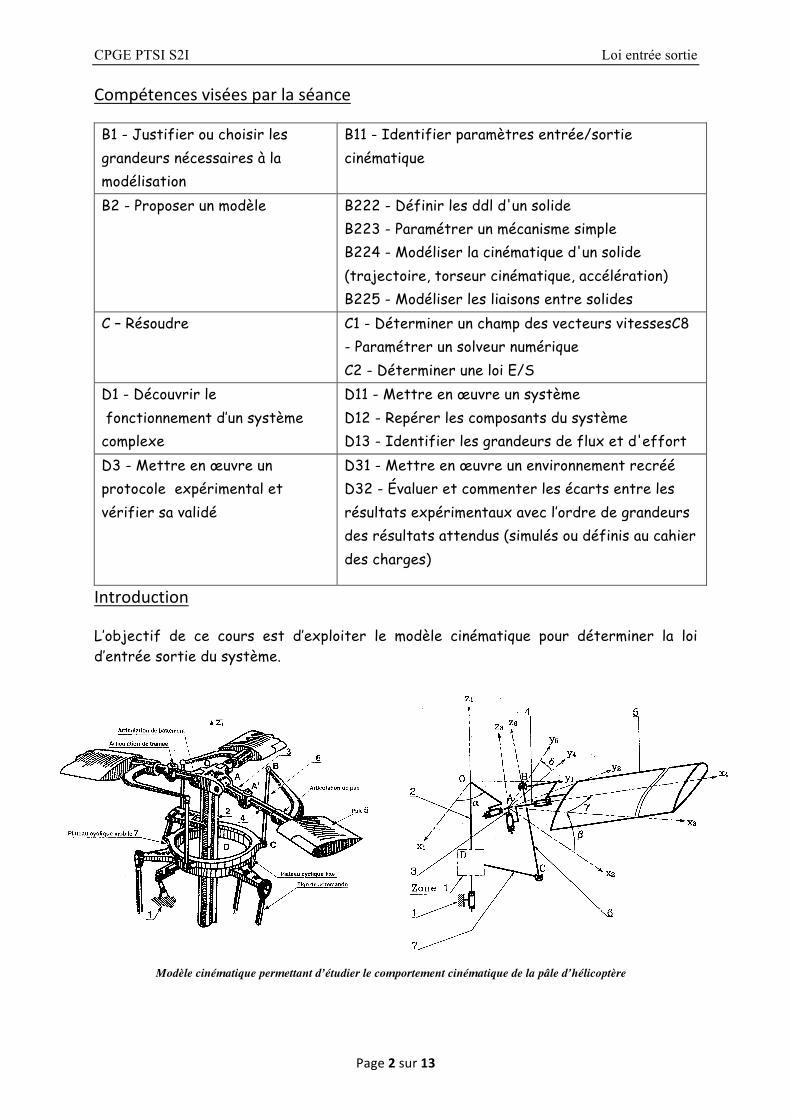
L’objectif de ce cours est d’exploiter le modèle cinématique pour déterminer la loi d’entrée sortie du système.
Modèle cinématique permettant d’étudier le comportement cinématique de la pâle d’hélicoptère
CPGE PTSI S2I Loi entrée sortie
Page3sur13
I Modélisationdespiècespardes«solidesparfaits»On suppose, dans nos études mécaniques (sauf indication contraire), que les pièces mécaniques sont des solides parfaits :
• • •
•
•
Remarque
Les pièces déformables telles que les ressorts seront exclues de nos calculs lorsque nous utiliserons l’hypothèse de solide parfait.
II ModélisationdesliaisonsOn parle de liaisons entre deux pièces dès lors que celles-ci sont en contact.
II.1 Définitiond’uneliaisonparfaiteOn fera les hypothèses suivantes dans les études cinématiques :
•
• • • •
II.2 RepèreassociéàuneliaisonAfin de pouvoir schématiser le mécanisme il nous faut pouvoir définir l’emplacement des différents éléments. On définit pour cela un repère local associé à la liaison. En général, il n’appartient à aucun des deux solides en contact :
• L’origine sera placée en un point caractéristique de la liaison (point de contact, centre géométrique…) ;
• Les vecteurs directeurs de sa base correspondent dans la mesure du possible à des axes de symétrie, des normales au plan…
• Le repère local sera choisi de sorte que les mouvements élémentaires de la liaison soient indépendants.
CPGE PTSI S2I Loi entrée sortie
Page4sur13
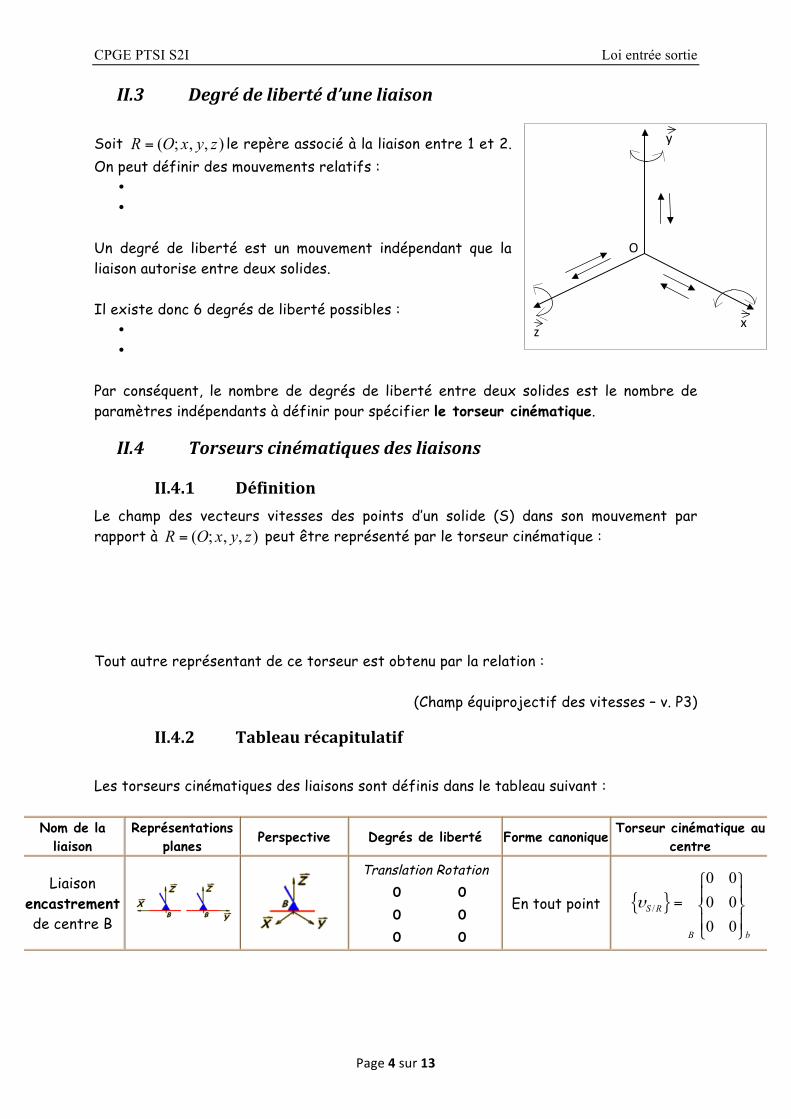
II.3 Degrédelibertéd’uneliaison Soit ( ; , , )R O x y z= le repère associé à la liaison entre 1 et 2. On peut définir des mouvements relatifs :
• •
Un degré de liberté est un mouvement indépendant que la liaison autorise entre deux solides. Il existe donc 6 degrés de liberté possibles :
• •
Par conséquent, le nombre de degrés de liberté entre deux solides est le nombre de paramètres indépendants à définir pour spécifier le torseur cinématique.
II.4 Torseurscinématiquesdesliaisons
II.4.1 DéfinitionLe champ des vecteurs vitesses des points d’un solide (S) dans son mouvement par rapport à ( ; , , )R O x y z= peut être représenté par le torseur cinématique :
Tout autre représentant de ce torseur est obtenu par la relation :
(Champ équiprojectif des vitesses – v. P3)
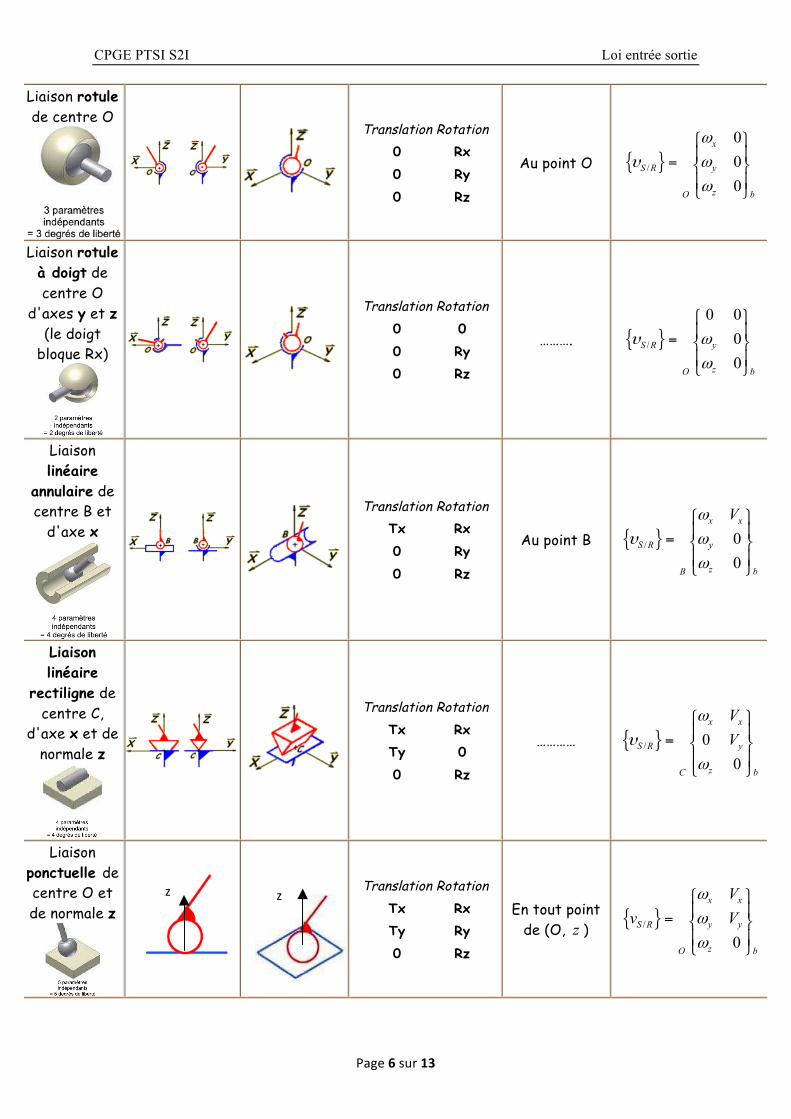
II.4.2 Tableaurécapitulatif Les torseurs cinématiques des liaisons sont définis dans le tableau suivant :
Nom de la liaison
Représentations planes
Perspective Degrés de liberté Forme canonique Torseur cinématique au
centre
Liaison encastrement de centre B
Translation Rotation 0 0 0 0 0 0
En tout point { }/0 00 00 0
S R
B b
υ⎧ ⎫⎪ ⎪
= ⎨ ⎬⎪ ⎪⎩ ⎭
y
zx
O

CPGE PTSI S2I Loi entrée sortie
Page5sur13
Liaison glissière de centre A et
d'axe x
Translation Rotation Tx 0 0 0 0 0
En tout point { }/00 00 0
x
S R
A b
Vυ
⎧ ⎫⎪ ⎪
= ⎨ ⎬⎪ ⎪⎩ ⎭
Liaison pivot de centre A et
d'axe x
Translation Rotation 0 Rx 0 0 0 0
En tout point de (A, x )
{ }/0
0 00 0
x
S R
A b
ω
υ⎧ ⎫⎪ ⎪
= ⎨ ⎬⎪ ⎪⎩ ⎭
Liaison pivot glissant de centre C et
d'axe x
Translation Rotation Tx Rx 0 0 0 0
En tout point de (C, x ) { }/ 0 0
0 0
x x
S R
C b
Vω
υ⎧ ⎫⎪ ⎪
= ⎨ ⎬⎪ ⎪⎩ ⎭
Liaison hélicoïdale de
centre B et d'axe y
Translation Rotation 0 0
Ty Ry = f(Ty)
0 0 1 seul ddl !!
En tout point de (B, y )
{ }/
0 0.2
0 0
yS R y
B b
pωυ ω
π
⎧ ⎫⎪ ⎪⎪ ⎪
= ⎨ ⎬⎪ ⎪⎪ ⎪⎩ ⎭
si pas à droite, sinon signe - (moins)
Liaison appui plan de centre
D et de normale z
Translation Rotation Tx 0 Ty 0 0 Rz
En tout point { }/00
0
x
S R y
zD b
VVυ
ω
⎧ ⎫⎪ ⎪
= ⎨ ⎬⎪ ⎪⎩ ⎭
y
CPGE PTSI S2I Loi entrée sortie
Page6sur13
Liaison rotule de centre O
Translation Rotation 0 Rx 0 Ry 0 Rz
Au point O { }/000
x
S R y
zO b
ω
υ ω
ω
⎧ ⎫⎪ ⎪
= ⎨ ⎬⎪ ⎪⎩ ⎭
Liaison rotule à doigt de centre O
d'axes y et z (le doigt
bloque Rx)
Translation Rotation 0 0 0 Ry 0 Rz
………. { }/0 0
00
S R y
zO b
υ ω
ω
⎧ ⎫⎪ ⎪
= ⎨ ⎬⎪ ⎪⎩ ⎭
Liaison linéaire
annulaire de centre B et
d'axe x
Translation Rotation Tx Rx 0 Ry 0 Rz
Au point B { }/ 00
x x
S R y
zB b
Vω
υ ω
ω
⎧ ⎫⎪ ⎪
= ⎨ ⎬⎪ ⎪⎩ ⎭
Liaison linéaire
rectiligne de centre C,
d'axe x et de normale z
Translation Rotation Tx Rx Ty 0 0 Rz
………… { }/ 00
x x
S R y
zC b
VV
ω
υ
ω
⎧ ⎫⎪ ⎪
= ⎨ ⎬⎪ ⎪⎩ ⎭
Liaison ponctuelle de centre O et de normale z
Translation Rotation Tx Rx Ty Ry 0 Rz
En tout point de (O, z )
{ }/0
x x
S R y y
zO b
Vv V
ω
ω
ω
⎧ ⎫⎪ ⎪
= ⎨ ⎬⎪ ⎪⎩ ⎭
z z
CPGE PTSI S2I Loi entrée sortie
Page7sur13
II.4.3 Formescanoniques:justificationdedeuxexemples Liaison linéaire rectiligne d’axe (C, x ) et de normale z :
Liaison rotule à doigt d’axes (O, y ) et (O, z ) :
III Liaisonscinématiquementéquivalentes
III.1 Définitiond’uneliaisonéquivalenteLors d’une approche globale, afin de simplifier la modélisation d’un mécanisme, on peut être amené à chercher des liaisons fictives équivalentes à un ensemble de liaisons réelles. Cette recherche peut se faire analytiquement par les torseurs cinématiques ou intuitivement par analyse des mouvements. On peut aussi être amené à concevoir une liaison à partir de sous liaisons.

CPGE PTSI S2I Loi entrée sortie
Page8sur13
Exemple :
Pour déterminer les liaisons équivalentes, il faut déterminer les torseurs cinématiques dans les liaisons. Deux types de configurations peuvent se rencontrer : liaisons en série ou en parallèle.
III.2 Liaisonsensérie
La liaison Leq est identifiée à partir de son torseur cinématique associé, à la condition que la liaison équivalente soit normalisée. On la détermine de la manière suivante :
expression obtenue par la relation de composition des mouvements (V. Cin. Analytique pour plus d’informations). Pour sommer ces torseurs il faut les écrire au même point de réduction ; généralement le point en lequel on cherche la liaison équivalente.
Exemple : patin à rotule
yo
P
z

CPGE PTSI S2I Loi entrée sortie
Page9sur13
Ø Démarche :
1. Ecrire les torseurs cinématiques associés aux liaisons. 2. Déterminer la liaison équivalente en O.
Ø Calculs :
On a :
Ø Intérêt technologique :
III.3 Liaisonsenparallèle
La liaison équivalente est identifiée à partir de sont torseur cinématique associé, à condition qu’elle soit normalisée. La compatibilité cinématique des n liaisons en parallèle avec la liaison équivalente, s'exprime par une identité des composantes de tous les torseurs réduits au même point.

CPGE PTSI S2I Loi entrée sortie
Page10sur13
Exemple :

CPGE PTSI S2I Loi entrée sortie
Page11sur13
IV Loientréesortied’unmécanisme
IV.1 Définitiond’uneloi«entrée-sortie» L’analyse du graphe de structure permet de classifier le mécanisme. En fonction de sa nature, différentes méthodes seront envisagées pour étudier sa cinématique. Une loi « entrée-sortie » est la relation entre les paramètres de situation (position, orientation) de la pièce d'entrée et les paramètres de situation de la pièce de sortie du mécanisme ou de leurs dérivées. Dans l'exemple de la pince NewMatt, la pièce d'entrée est le piston, et la pièce de sortie le doigt. La loi entrée-sortie est donc la relation entre la position du piston et l’angle de rotation du doigt.
IV.2 ClassificationdeschaînescinématiquesOn rencontrera trois types de chaînes cinématiques :
Chaîne ouverte Chaîne fermée Chaîne complexe
Une chaîne de solides ouverte est une chaîne où les solides extrêmes sont différents. Exemple type : un robot
Une chaîne de solides fermée est une chaîne où les deux solides extrêmes sont reliés par une
liaison. On a alors un cycle.
Une chaîne complexe est composée de plusieurs chaînes
ouvertes et fermées imbriquées.
S0 S1
Sn
S0 S1
SnS3
S0 S1
SnS3
CPGE PTSI S2I Loi entrée sortie
Page12sur13
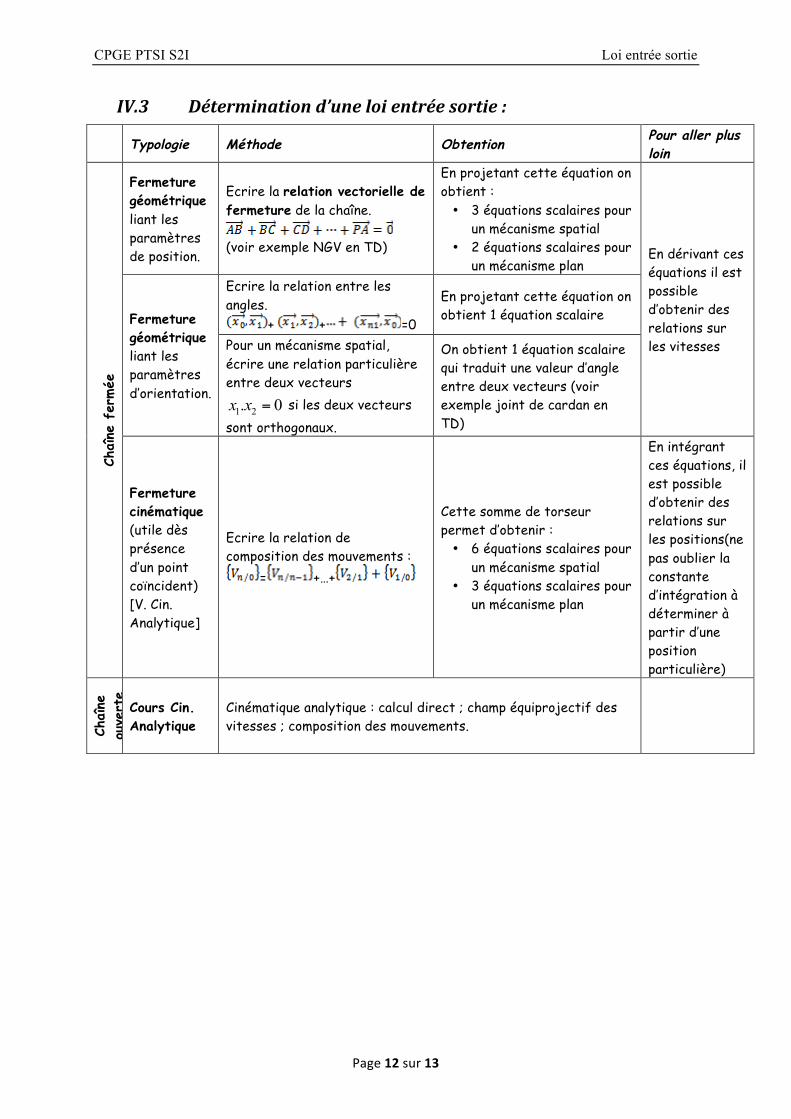
IV.3 Déterminationd’uneloientréesortie:
Typologie Méthode Obtention Pour aller plus loin
Chaîne
fer
mée
Fermeture géométrique liant les paramètres de position.
Ecrire la relation vectorielle de fermeture de la chaîne.
(voir exemple NGV en TD)
En projetant cette équation on obtient : • 3 équations scalaires pour
un mécanisme spatial • 2 équations scalaires pour
un mécanisme plan En dérivant ces équations il est possible d’obtenir des relations sur les vitesses
Fermeture géométrique liant les paramètres d’orientation.
Ecrire la relation entre les angles.
+ + =0
En projetant cette équation on obtient 1 équation scalaire
Pour un mécanisme spatial, écrire une relation particulière entre deux vecteurs
1 2. 0x x = si les deux vecteurs sont orthogonaux.
On obtient 1 équation scalaire qui traduit une valeur d’angle entre deux vecteurs (voir exemple joint de cardan en TD)
Fermeture cinématique (utile dès présence d’un point coïncident) [V. Cin. Analytique]
Ecrire la relation de composition des mouvements :
= +…+
Cette somme de torseur permet d’obtenir : • 6 équations scalaires pour
un mécanisme spatial • 3 équations scalaires pour
un mécanisme plan
En intégrant ces équations, il est possible d’obtenir des relations sur les positions(ne pas oublier la constante d’intégration à déterminer à partir d’une position particulière)
Chaîne
ou
vert
e
Cours Cin. Analytique
Cinématique analytique : calcul direct ; champ équiprojectif des vitesses ; composition des mouvements.