Daniel Bernoulli Mécanique des Milieux Continus mercredi 17 juin 2015... · Notion de solide fS...
20
www.cnam-centre.fr www.in2p3.fr/actions/formation/calculs15/calculs15.html Daniel Bernoulli Conservatoire National des Arts et Métiers Région Centre-Val de Loire Ecole de calculs IN2P3 2015 Mécanique des Milieux Continus Vecteur Force Vecteur Contrainte Opérateur des Contraintes
Transcript of Daniel Bernoulli Mécanique des Milieux Continus mercredi 17 juin 2015... · Notion de solide fS...
www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Daniel Bernoulli
Conservatoire National des Arts et Métiers Région Centre-Val de Loire
Ecole de calculs IN2P3 2015
Mécanique des Milieux Continus
Vecteur Force
Vecteur Contrainte
Opérateur des Contraintes

www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Notion de solide
)(Pf S )(, dSP
S∂
)(, dVM
)(Mfv
(S) Un solide (S) est en équilibre
sous l'action de deux types de forces extérieures :
Densité volumique )(Mf v (en N/mm3 )
( ) ( ) ( ) ( ) ( ) dVMfdVgMgdVMgMdmMdP v==== ρρ( ) ( ) gMMfv ρ=
Densité surfacique (en N /mm² )
)(Pf s
)(PfS
( ) ( )SdF P f P dS=�������� ��������

www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Notion de coupure
π
)( 1S
)( 2S
dF
n
)( 2S
)(, dSP
)( 2S
Un plan � partage le solide (S) en deux parties )( 1S et )( 2S
n vecteur unitaire orthogonal au plan �
www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Vecteur contrainte
0
( )( , ) lim
dS
dF PT P n
dS→=
��������
���������
�
Vecteur contrainte au point P relativement à la direction n
),(),( nPTnPT −−=
' '( , ) . ( , ) .T P n n T P n n=���������
����������� ��
� �
Propriétés :

www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Contrainte Normale et Contrainte Tangentielle
n
),( nPTnT
tTP
dS
( , ) n tT P n T n T= +���������
� � ��
Tn Contrainte normale
Tt Contrainte tangentielle

www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Opérateur des contraintes coupure suivant axe 1
Richard Hooke
1x��
2x���
1n x=� ��
( )1,T P x����������
��
P
1x��
1 11 1 12 2 13 3( , )T P x x x xσ σ σ= + +���������
�� �� ��� ���
•facette
:
Facette

www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Opérateur des contraintes coupure suivant axe 2
1x��
2x���
2n x=� ���
( )2,T P x����������
���
P
2x 3232221212),( xxxxPT σσσ ++=
•facette
:
Facette

www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Opérateur des contraintes coupure suivant axe 3
Richard Hooke
1x��
2x���
3n x=� ���
( )3,T P x����������
���
P
3x���
3 31 1 32 2 33 3( , )T P x x x xσ σ σ= + +����������
��� �� ��� ���
•facette
:
Facette

www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Opérateur des contraintes coupure axe quelconque
Richard Hooke
1x��
2x���
n�
P
n�
1 1 2 2 3 3( , )T P n T x T x T x= + +���������
� �� ��� ���
:
Facette
Avec 1 1 2 2 3 3n n x n x n x= + +
� �� ��� ���
( , )T P n���������
�

www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Mise en évidence de l’opérateur des contraintes
313212111111 .),(.),( nnnnxPTxnPTT σσσ ++===
323222121222 .),(.),( nnnnxPTxnPTT σσσ ++===
333232131333 .),(.),( nnnnxPTxnPTT σσσ ++===
En appliquant le théorême de Cauchy il est aisé de montrer
( ) ( ) ( )3,2,13,2,132
3
2
1
333231
232221
131211
,,3
2
1
xxxxxx
n
n
n
T
T
T
xxx
=
σσσσσσσσσ
Système d ’équations qui sous forme matricielle s’écrit

www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Opérateur des contraintes
Jacques Bernoulli
colonne
( )321 ,,3
2
1
xxxT
T
T
3,2,1
3
2
1
.
xxx
n
n
n
( )[ ]Pσ
( )
( ), ,1 2 3
11 12 13
21 22 23
31 32 33x x x
P
σ σ σσ σ σ σ
σ σ σ
= ��� ��� ���
=
( , )T P n���������
�
n�
( , ) ( )T P n P nσ =
���������
� �
Représentant matriciel de
Représentant matriciel de
Opérateur des contraintes (ou tenseur ou matrice ..!!)

www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Symétrie de l’opérateur des contraintes
Sir George Gabriel Stokes
1221 .),(.),( xxPTxxPT = ⇒ 2112 σσ =
2332 .),(.),( xxPTxxPT = ⇒ 3223 σσ =
3113 .),(.),( xxPTxxPT = ⇒ 1331 σσ =
En appliquant le théorème de Cauchy :
Donc le représentant matriciel de l’opérateur des contraintes
est une matrice 3x3 symétrique
( )
( ), ,1 2 3
11 12 13
21 22 23
31 32 33x x X
P
σ σ σσ σ σ σ
σ σ σ
= ��� ��� �����
www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Exemple
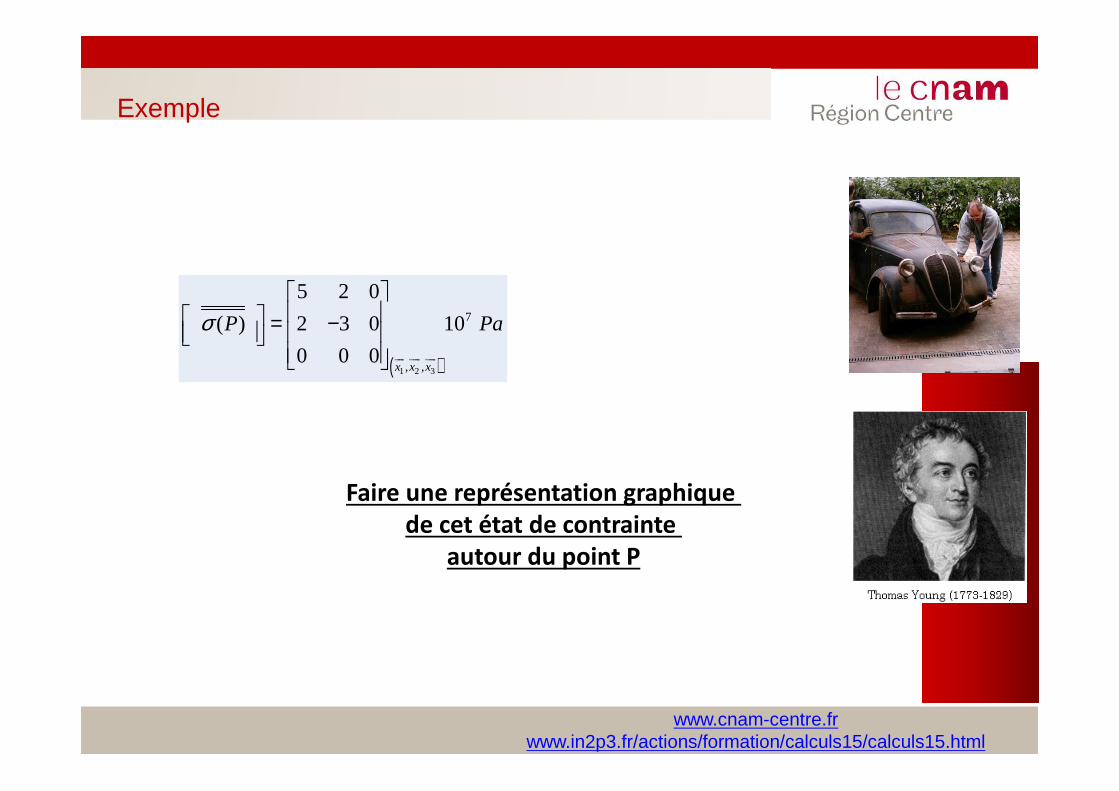
( )1 2 3
7
, ,
5 2 0
( ) 2 3 0 10
0 0 0x x x
P Paσ = − ��� ��� ���
Faire une représentation graphique
de cet état de contrainte
autour du point P

www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Exemple
Torricelli Evangelista
1x
P 1xn ≡522x���
[ ][ ]( ) ( ) ( )
27
17
,,
7
,,,,
11 102105
0
2
5
10
0
0
1
000
032
025
)(),(
321321321
xxxPxPT
xxxxxxxxx
+=
=
−== σ
Pour un facette de normale l’axe 1
1x��

www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Ecrouissage Dislocations
Torricelli Evangelista
Pour un facette de normale l’axe 2
[ ][ ]( ) ( ) ( )
27
17
,,
7
,,,,
22 103102
0
3
2
10
0
1
0
.
000
032
025
)(),(
321321321
xxxPxPT
xxxxxxxxx
−=
−=
−== σ
2x
1x
2xn ≡
P
-3
2
à 107 Pa

www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Exemple
Torricelli Evangelista
P
1x
2x-2
2
-2
2
3
-3
-5 5
Afin de mieux visualiser la réalité physique de l’opérateur des contrainte
il faut isoler un élément de volume autour du point P
P
2-3
-5 5
P-2
2
-2
2
Effet des contraintes normales Effet des contraintes tangentielles
2

www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Contraintes et Directions principales
Thomas Watt
Le représentant matriciel de l’opérateur des contraintes étant une matrice 3x3 symétrique,
Il existe donc trois valeurs propres et vecteurs propres orthogonaux
A partir de ( )
( ), ,1 2 3
11 12 13
21 22 23
31 32 33x x x
P
σ σ σσ σ σ σ
σ σ σ
= ��� ��� ���
Il existe une base orthonormée ( ), ,1 2 3X X X���� ����� �����
Dans laquelle, le représentant matriciel
de l’opérateur des contraintes devient :
( )
( ), ,1 2 3
1
2
3
0 0
0 0
0 0X X X
P
σσ σ
σ
= ���� ����� �����

www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Exemple
( )
( ), ,1 2 3
6 2 0
2 3 0
0 0 0x x x
Pσ = ��� ��� ���
P
1x
-2
2
-2
2
-3
3
-6 6
2
1X
°≈ 27θ
1x
2x2X
( )
( ), ,1 2 3
7 0 0
0 2 0
0 0 0X X X
Pσ = ���� ����� �����
-2
2
-7
72
1X
2X

www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Utilité de la connaissance des contraintes et directions principales
Coulomb Charles
1 2 3Suivant X , X et X le materiau ne travaille qu'en traction ou compression��� ��� ���
Si ( )
( ), ,1 2 3
1
2
3
0 0
0 0
0 0X X X
P
σσ σ
σ
= ���� ����� �����
Alors si matériau fragile ( )i eMax σ σ≤
Sinon rupture dans un plan orthogonal à 3X�����
Et si matériau ductile ( )i J eSup σ σ σ− ≤
Sinon plan de glissement à 45° des directions Xi���
Xj���
et

www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Conclusion
Voir exemples d’application avec RDM 6