Méthode d'analyse simplifiée appliquée aux structures tridimensionnelles
17
This article was downloaded by: [The University of Manchester Library] On: 19 October 2014, At: 07:42 Publisher: Taylor & Francis Informa Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House, 37-41 Mortimer Street, London W1T 3JH, UK Revue Européenne des Éléments Publication details, including instructions for authors and subscription information: http://www.tandfonline.com/loi/tecm19 Méthode d'analyse simplifiée appliquée aux structures tridimensionnelles Leila Khalij a , Said Hariri a & Rachel Vaucher a a Ecole des Mines de Douai, Département MCM , 941 rue Charles Bourseul BP 838, F-59508 , Douai cedex Published online: 26 Apr 2012. To cite this article: Leila Khalij , Said Hariri & Rachel Vaucher (2002) Méthode d'analyse simplifiée appliquée aux structures tridimensionnelles, Revue Européenne des Éléments, 11:6, 703-718 To link to this article: http://dx.doi.org/10.3166/reef.11.703-718 PLEASE SCROLL DOWN FOR ARTICLE Taylor & Francis makes every effort to ensure the accuracy of all the information (the “Content”) contained in the publications on our platform. However, Taylor & Francis, our agents, and our licensors make no representations or warranties whatsoever as to the accuracy, completeness, or suitability for any purpose of the Content. Any opinions and views expressed in this publication are the opinions and views of the authors, and are not the views of or endorsed by Taylor & Francis. The accuracy of the Content should not be relied upon and should be independently verified with primary sources of information. Taylor and Francis shall not be liable for any losses, actions, claims, proceedings, demands, costs, expenses, damages, and other liabilities whatsoever or howsoever caused arising directly or indirectly in connection with, in relation to or arising out of the use of the Content. This article may be used for research, teaching, and private study purposes. Any substantial or systematic reproduction, redistribution, reselling, loan, sub-licensing, systematic supply, or distribution in any form to anyone is expressly forbidden. Terms & Conditions of access and use can be found at http:// www.tandfonline.com/page/terms-and-conditions
Transcript of Méthode d'analyse simplifiée appliquée aux structures tridimensionnelles

This article was downloaded by: [The University of Manchester Library]On: 19 October 2014, At: 07:42Publisher: Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registered office: MortimerHouse, 37-41 Mortimer Street, London W1T 3JH, UK
Revue Européenne des ÉlémentsPublication details, including instructions for authors and subscription information:http://www.tandfonline.com/loi/tecm19
Méthode d'analyse simplifiée appliquée auxstructures tridimensionnellesLeila Khalij a , Said Hariri a & Rachel Vaucher aa Ecole des Mines de Douai, Département MCM , 941 rue Charles Bourseul BP 838,F-59508 , Douai cedexPublished online: 26 Apr 2012.
To cite this article: Leila Khalij , Said Hariri & Rachel Vaucher (2002) Méthode d'analyse simplifiée appliquée auxstructures tridimensionnelles, Revue Européenne des Éléments, 11:6, 703-718
To link to this article: http://dx.doi.org/10.3166/reef.11.703-718
PLEASE SCROLL DOWN FOR ARTICLE
Taylor & Francis makes every effort to ensure the accuracy of all the information (the “Content”) containedin the publications on our platform. However, Taylor & Francis, our agents, and our licensors make norepresentations or warranties whatsoever as to the accuracy, completeness, or suitability for any purpose ofthe Content. Any opinions and views expressed in this publication are the opinions and views of the authors,and are not the views of or endorsed by Taylor & Francis. The accuracy of the Content should not be reliedupon and should be independently verified with primary sources of information. Taylor and Francis shallnot be liable for any losses, actions, claims, proceedings, demands, costs, expenses, damages, and otherliabilities whatsoever or howsoever caused arising directly or indirectly in connection with, in relation to orarising out of the use of the Content.
This article may be used for research, teaching, and private study purposes. Any substantial or systematicreproduction, redistribution, reselling, loan, sub-licensing, systematic supply, or distribution in anyform to anyone is expressly forbidden. Terms & Conditions of access and use can be found at http://www.tandfonline.com/page/terms-and-conditions
Revue européenne des éléments finis. Volume 11 – n° 6/2002, pages 703 à 718
Méthode d’analyse simplifiée appliquéeaux structures tridimensionnelles
Leila Khalij — Said Hariri — Rachel Vaucher
Ecole des Mines de DouaiDépartement MCM941 rue Charles Bourseul BP 838F-59508 Douai cedex
RÉSUMÉ. Cet article présente une méthode d’analyse simplifiée des structures inélastiques.Cette approche a été proposée par J. Zarka et al. afin de prédire la nature de l’état limite etle comportement des structures sollicitées cycliquement. Elle permet une diminution du tempset de la complexité des calculs, comparée aux formulations incrémentales classiques. Suite àune décomposition de la réponse réelle (en une partie élastique et une partie plastique) et àun changement de variable, les champs de contraintes résiduelles et de déformationsplastiques sont déterminés en tout point de la structure grâce à un calcul purement élastique.De plus, l’application de l’analyse simplifiée va nous permettre de nous affranchir de lasous-intégration des éléments.
ABSTRACT. This paper presents a simplified analysis method for the inelastic structures. Thisapproach has been proposed by J. Zarka et al. in order to predict the nature of the limit stateand the behaviour of structures under cyclic load. It decreases significantly thecomputational complexity and duration of the calculations in comparison to incrementalformulations. By means of a decomposition of the real response (into an elastic and a plasticpart) and of a change of variable, the plastic strains and the residual stresses can bedetermined in the whole structure thanks to a purely elastic calculation.
MOTS-CLÉS : analyse inélastique simplifiée, état limite, chargement cyclique radial,contraintes résiduelles, déformations plastiques, sous-intégration des éléments.
KEYWORDS: simplified analysis, limit state, cyclic radial loading, residual stresses, plasticstrain, under-integration of elements.
Dow
nloa
ded
by [
The
Uni
vers
ity o
f M
anch
este
r L
ibra
ry]
at 0
7:42
19
Oct
ober
201
4

704 Revue européenne des éléments finis. Volume 11 – n° 6/2002
1. Introduction
Les problèmes de technologie actuels nécessitent la connaissance ducomportement des structures sous chargements mécaniques qui varientpériodiquement et peuvent ainsi induire des déformations irréversibles. Ceci conduità une analyse inélastique de structure s’effectuant habituellement par l’utilisation deméthodes de type incrémental. Dans le cas des chargements cycliques, ces méthodesentraînent des coûts et des temps de calcul très élevés. Dans cette étude, nous nousintéresserons à la Méthode d’Analyse Simplifiée des Structures Inélastiquesproposée par le Professeur Zarka et son équipe [ZAR 90]. Elle repose, par un calculpurement élastique, sur la décomposition de la réponse réelle et sur un changementde variable adéquat qui permettent de déterminer l’état limite d’une structure ainsique les déformations plastiques et les contraintes résiduelles en tout point.
La validité de cette méthode a été prouvée dans plusieurs domaines : à partird’exemples simples [ING 84, VAS 96, TRI 83, GAT 93] ; d’application concrètessous chargements sismiques ou dynamiques [ZAR 88] ; pour les études de contactpar roulement, grenaillage ou galetage [ZAR 90, FRE 91, LU 91, BRA 91] ouencore avec prise en compte des effets géométriques [JAR 87].
Au bout d’un grand nombre de cycles, trois états limites peuvent apparaître(figure 1) :
– a) adaptation. En tout point de la structure, la déformation plastique atteint unétat limite stabilisé constant ;
– b) accommodation. En tout point de la structure, la déformation plastiqueatteint un état limite stabilisé périodique ;
– c) rochet. Il existe au moins un point de la structure où la déformationplastique s’accroît de manière incrémentale et ce, jusqu’à obtenir la ruine de lastructure.
(a)
(b)
(c)
Figure 1. Etats limites d’une structure
Dow
nloa
ded
by [
The
Uni
vers
ity o
f M
anch
este
r L
ibra
ry]
at 0
7:42
19
Oct
ober
201
4

Méthode d’analyse simplifiée 705
Nous verrons la méthode d’analyse simplifiée puis l’intégration de cette méthodedans un code éléments finis. Enfin par un exemple, nous montrerons l’influence de lasous-intégration des éléments sur la méthode par le biais des répartitions des champsde contraintes résiduelles et de la déformation plastique.
2. La méthode d’analyse simplifiée
Les chargements retenus sont de type quasi statique sous l’hypothèse des petitesperturbations. La structure est constituée d’un matériau dit Standard Généralisé(MSG) [HAL 75]. Ces matériaux sont supposés stables au sens de Drucker[DRU 64] et obéissent au Principe du Travail Plastique Maximal (PTPM) de Hill[HIL 50]. Ceci entraîne la normalité du vecteur accroissement des déformationsplastiques et la convexité de la surface de charge f.
Le critère de von Mises permet de représenter cette surface de charge dansl’espace des déviateurs du tenseur des contraintes. De plus, le matériau possède uneloi d’évolution à écrouissage cinématique linéaire (modèle de Prager [PRA 55]) afind’exclure l’état limite de type Rochet. L’état adapté ou accommodé de la structureest obtenu lorsque le cycle asymptotique est respectivement élastique ou périodique.
2.1. Détermination des différentes réponses de la structure
Soit )t(U el , )t(Eel et )t(elΣ la réponse élastique fictive de la structure en
fonction du temps t (respectivement déplacement, déformation et contrainte). Nousavons :
)t(E)t(M)t(E Ielel +Σ= [1]
)t(E I étant la déformation initiale et M la matrice de rigidité ou de souplesse.
Soit )t(U , )t(E et )t(Σ la réponse réelle de la structure qui peut être
décomposée en une partie élastique (-el) et une partie inélastique (-ine, R) auto-équilibrée :
+Σ=Σ
+=
+=
)t(R)t()t(
)t(E)t(E)t(E
)t(U)t(U)t(U
el
ineel
ineel
[2]
De plus, il est aussi possible de décomposer, de façon traditionnelle, E(t) en unepartie élastique, plastique et initiale :
Dow
nloa
ded
by [
The
Uni
vers
ity o
f M
anch
este
r L
ibra
ry]
at 0
7:42
19
Oct
ober
201
4

706 Revue européenne des éléments finis. Volume 11 – n° 6/2002
Σ=
++=
)t(M)t(E
)t(E)t(E)t(E)t(Ee
IPe
[3]
Les équations [2] et [3] donnent :
)t(E)t(MR)t(E Pine += [4]
R(t) étant le champ des contraintes résiduelles et )t(E P la déformation plastique.
Par l’intermédiaire d’un opérateur élastique de type éléments finis, noté ELAS,nous allons déterminer les champs de déplacements, de déformations et decontraintes selon la réponse considérée. ELAS est de la forme générale suivante(figure 2) et permet de déduire la réponse élastique de la structure :
)M),t(F),t(U),t(E),t(X,S,S,V( ELAS ddIdFU [5]
Ud
Fd
X d EI
SU
SF
(t)
(t) (t)V( , )
(t)
Figure 2. Chargement de la structure
En comparant les équations [1] et [4], on en déduit que le champ des contraintesinélastiques peut être obtenu en réalisant un calcul élastique homogène, avec commedéformation initiale )t(EP , autrement dit en utilisant l’opérateur ELAS avec les
paramètres suivants :
)M,0,0),t(E,0,S,S,V( ELAS 1ddPdFU
−[6]
Cela signifie que le champ des contraintes résiduelles est une fonction linéaire dela déformation irréversible )t(EP que l’on peut donc exprimer symboliquement
sous la forme :
)t(EZ)t(R P0= [7]
)t(Xd :forces de volumes.
)t(Fd : forces de surfaces.
)t(Ud :déplacements imposés.
Dow
nloa
ded
by [
The
Uni
vers
ity o
f M
anch
este
r L
ibra
ry]
at 0
7:42
19
Oct
ober
201
4

Méthode d’analyse simplifiée 707
0Z est un opérateur linéaire symétrique et singulier. Par conséquent, à partir de
)t(EP on peut déterminer R(t), mais la réciproque n’est pas vraie. Nous allons donc
découpler l’équation [7] par l’intermédiaire d’un changement de variable.
2.2. Nouvelle écriture
Pour le matériau à écrouissage cinématique linéaire, le modèle de Prager associéau critère de von Mises permet d’intégrer la notion de paramètre interne et peut semettre sous la forme suivante dans l’espace des déviateurs de contraintes S :
20
P ))t(y)t(S))(t(y)t(S(23
)E,S( σ≤−−=f[8]
avec f la fonction de charge, 0σ la limite élastique et )t(E)t(y P&= le champ des
paramètres internes, & étant le module d’écrouissage.
Comme )t(R)t()t( el +Σ=Σ et )]t([dev)t(S Σ= , on a )t(devR)t(S)t(S el += et :
)]t(devR)t(y[)t(S)t(y)t(S el −−=−
On pose finalement :
)t(devR)t(y)t(Y −= [9]
où Y(t) est le paramètre transformé de la structure. Il met en évidence le couplagequi existe entre les contraintes résiduelles et les paramètres internes caractérisantl’écrouissage y. On se place désormais dans l’espace des Y.
Le critère de von Mises s’écrit donc :
20
elel ))t(Y)t(S))(t(Y)t(S(23 σ≤−−
[10]
L’introduction de ce paramètre nous fournit les renseignements suivants :
– a chaque instant, ces paramètres doivent vérifier le critère de plasticité c’est-à-dire être plastiquement admissibles. Ils sont à l’intérieur du convexe centré sur
)t(Sel ;
– s’il y a écoulement, il se fait à la vitesse :
[ ])t(Y)t(S)t(E elP −λ=�
[11]
où 0=λ si 0)E,S( P <f et 0≥λ si 0)E,S( P =f
Dow
nloa
ded
by [
The
Uni
vers
ity o
f M
anch
este
r L
ibra
ry]
at 0
7:42
19
Oct
ober
201
4

708 Revue européenne des éléments finis. Volume 11 – n° 6/2002
Dans l’espace des Y, les positions de Y(t) sont connues dès lors que la solutionélastique )t(Sel est connue indépendamment de l’histoire de chargement. Ces
positions sont déterminées localement en tout point de la structure. Ainsi on peutexprimer la déformation inélastique )t(EP en fonction de Y(t) et de R(t), soit :
)]t(devR)t(Y[)t(E 1P += −& [12]
L’équation [13] injectée dans l’équation [4], nous donne :
)t(devR)t(Y)t(MR)t(E 11ine −− ++= && [13]
)t(Y)t(R]devM[)t(E 11ine −− ++=⇒ && [14]
On pose devMM 1−+= & où M est l’opérateur de souplesse modifié.
On détermine les champs inélastiques et donc R(t) par l’intermédiaire del’opérateur élastique adapté à l’état limite considéré, mis alors sous la forme :
)M,0,0),t(Y,0,S,S,V( ELAS 1dd1dFU
−−& [15]
avec comme déformation initiale )t(Y1−& et comme loi de comportement 1M − .
On a finalement le champ des contraintes résiduelles tel que :
)]t(Y)t(E[M)t(R 1ine1 −− −= & [16]
La loi de comportement modifiée 1M − est fonction d’un module de Young
modifié E et d’un coefficient de Poisson ν modifié :
++ν=ν
+=
C32C3ˆ
C32C3ˆ
E
EE
EE
[17]
2.3. Nature de l’état limite de la structure
L’état limite peut être immédiatement déterminé à partir des analyses inélastiquesde la structure c’est-à-dire en obtenant )t(elΣ pour un cycle [0,T].
Le critère de von Mises est représenté par une sphère. Dans l’espace des Y, cettesphère est centrée en )t(Sel et est de rayon oσ .
Dow
nloa
ded
by [
The
Uni
vers
ity o
f M
anch
este
r L
ibra
ry]
at 0
7:42
19
Oct
ober
201
4

Méthode d’analyse simplifiée 709
Pour des chargements cycliques et en chaque point P de la structure, le champdes contraintes élastiques varie périodiquement sous la forme :
)P()t()P())t(1()t,P( elmax
elmin
el ΣΛ+ΣΛ−=Σ [18]
Le facteur )t(Λ variant entre 0 et 1 puis entre 1 et 0.
Une construction élémentaire et locale est requise. Soit LC l’intersection entre
le convexe )S( elmaxC centré en el
maxS et le convexe )S( elminC centré en el
minS . Ces
deux convexes sont obtenus respectivement pour l’amplitude de chargementmaximum et pour l’amplitude de chargement minimum. Posons donc :
)S()S(C elmin
elmaxL CC ∩= [19]
D’après Halphen [HAL 78], sur une période, l’état limite d’une structure peutêtre adapté si LC est non vide ( ∅≠LC ) en tout point de la structure ou
accommodé si LC est vide ( ∅=LC ) en au moins un point de la structure.
Y doit être plastiquement admissibles à chaque instant et donc appartenir auxdeux convexes afin d’obtenir la solution finale de Y notée LY . En fonction de la
position d’un 0Y (paramètre transformé structural initial), nous allons être amené à
faire des projections orthogonales pour évaluer la solution LY .
Nous supposerons un état initial vierge de la structure c’est-à-dire :
===
==
0)0(R)0(E)0(E
0Y)0(YPI
0
[20]
Ainsi, les cas possibles de projections peuvent être représentés suivant lafigure 3.
Selmin Sel
max
Y0
(a)
Selmin Sel
max
YL
(b)
Y0
Selmax
(c)
∆Ymin
∆Ymax
Selmin
Figure 3. Règles de projection
Dow
nloa
ded
by [
The
Uni
vers
ity o
f M
anch
este
r L
ibra
ry]
at 0
7:42
19
Oct
ober
201
4

710 Revue européenne des éléments finis. Volume 11 – n° 6/2002
2.3.1. Cas adapté (figures 3.a et 3.b)
– (a) L0 CY ∈ . Il n’y a pas plastification et donc 0EP = . On a :
)M,0,0,E,0,S,S,V( ELAS 1ddPdFU
−[21]
– (b) 0
L
L YCprojY = 1. Il y a plastification :
)M,0,0,Y,0,S,S,V( ELAS 1ddL
1dFU
−−& [22]
Ces deux opérateurs permettent de déterminer les champs inélastiques adaptés.
2.3.2. Cas accommodé (figure 3.c)
– (c) On recherche une borne inférieure et une borne supérieure de Y∆ qui
permettront d’obtenir un encadrement de la quantité PE∆ .
Borne inférieure : comme à chaque sommet la solution doit se trouver dans
)S(C elmin puis dans )S(C el
max , une borne inférieure immédiate est obtenue pour
l’amplitude Y∆ [ZAR 90].
el
el
omin S.
S
21Y ∆
∆
σ−=∆
[23]
oσ est le rayon de la sphère, elmin
elmax
el SSS −=∆ et )S()S(23S elTelel ∆∆≡∆ .
On obtient finalement ineminU∆ , ine
minE∆ et minR∆ par l’intermédiaire de
l’opérateur :
)M,0 ,0 ,Y ,0,S,SV, ELAS( -1ddmin
1dFU ∆−
& [24]
Borne supérieure : quand l’amplitude de charge est très grande, il est possible dedémontrer qu’un état stationnaire est atteint dans lequel la vitesse d’évolution de
ijY est la même que celle de elijS . L’équation [18] devient :
elmax
elmin
el S.S)1(S Λ+Λ−= [25]
Nous pouvons écrire :
1. LY est la projection orthogonale de 0Y sur LC
Dow
nloa
ded
by [
The
Uni
vers
ity o
f M
anch
este
r L
ibra
ry]
at 0
7:42
19
Oct
ober
201
4

Méthode d’analyse simplifiée 711
elelmax
elmin
elel SSS
ddS
S ∆=+−=Λ
=�
[26]
elel SSY ∆==⇒ ��
[27]
et
Y)YS(E 1elP��
−=−Λ= & [28]
or
0elTel )YS()YS(
23 σ=−−
[29]
0
1Y
σ=Λ⇒
−�&
[30]
Les positions ultimes, comme l’illustre la figure 4, s’écriront :
Y1
SY 1elmin
ultmin
�
−
Λ+= &
[31]
Y1
SY 1elmax
ultmax
�
−
Λ−= &
[32]
� �Y Sel= −
�Sel Y ultmax
Y ultmin
Selmin
Selmax
� �Y Sel=
∆Sel
Figure 4. Bornes supérieures de l’accommodation
D’où finalement :
ultmin
ultmaxmax YYY −=∆ . [33]
Dow
nloa
ded
by [
The
Uni
vers
ity o
f M
anch
este
r L
ibra
ry]
at 0
7:42
19
Oct
ober
201
4

712 Revue européenne des éléments finis. Volume 11 – n° 6/2002
On obtient : inemaxU∆ , ine
maxE∆ et maxR∆ par l’opérateur :
)M,0 ,0 ,Y ,0,S,S(V, ELAS -1ddmax
1dFU ∆−
& [34]
2.3.3. Partition mixte
Considérons deux types de la partition du volume V qui suit (figure 5) :
YV αV
)ˆ,ˆ(M 1 ν− E ),(M 1 ν− E
PEYC 1−
Figure 5. Partition mixte
– sur αV , il n’y a pas d’évolution plastique du mécanisme (Cf. équation [21].
– sur YV , Y est connu et c’est la déformation plastique PE qui est recherchée
(Cf. équations [22], [24] et [34].
3. Intégration de la méthode d’analyse simplifiée dans un code Eléments Finis
Soit U~
une approximation de U champ de déplacement en chaque point del’élément elt :
∑ ==≈ elteltii
U~
.NU~
NU~
U[35]
eltU~
représente l’ensemble des déplacements nodaux pour un élément particulier
elt. N représente la matrice des fonctions d’interpolation sur l’élément ou matrice
des fonctions de forme.
Les déformations sont obtenues par l’équation approchée suivante :
eltU~
.BE = [36]
avec E vecteur représentatif des déformations et B matrice de dérivée des fonctionsde forme. La matrice élémentaire de rigidité est la suivante :
Dow
nloa
ded
by [
The
Uni
vers
ity o
f M
anch
este
r L
ibra
ry]
at 0
7:42
19
Oct
ober
201
4
Méthode d’analyse simplifiée 713
∫+∫= −−
α YV
1T
V
1Telt BdVMBBdVMBK[37]
Soit eltF le vecteur des forces nodales élémentaires tel que :
∫+∫+∫= −
FY SF
dT
V
dT
V
I1Telt dSFNdVXNdVEMBF[38]
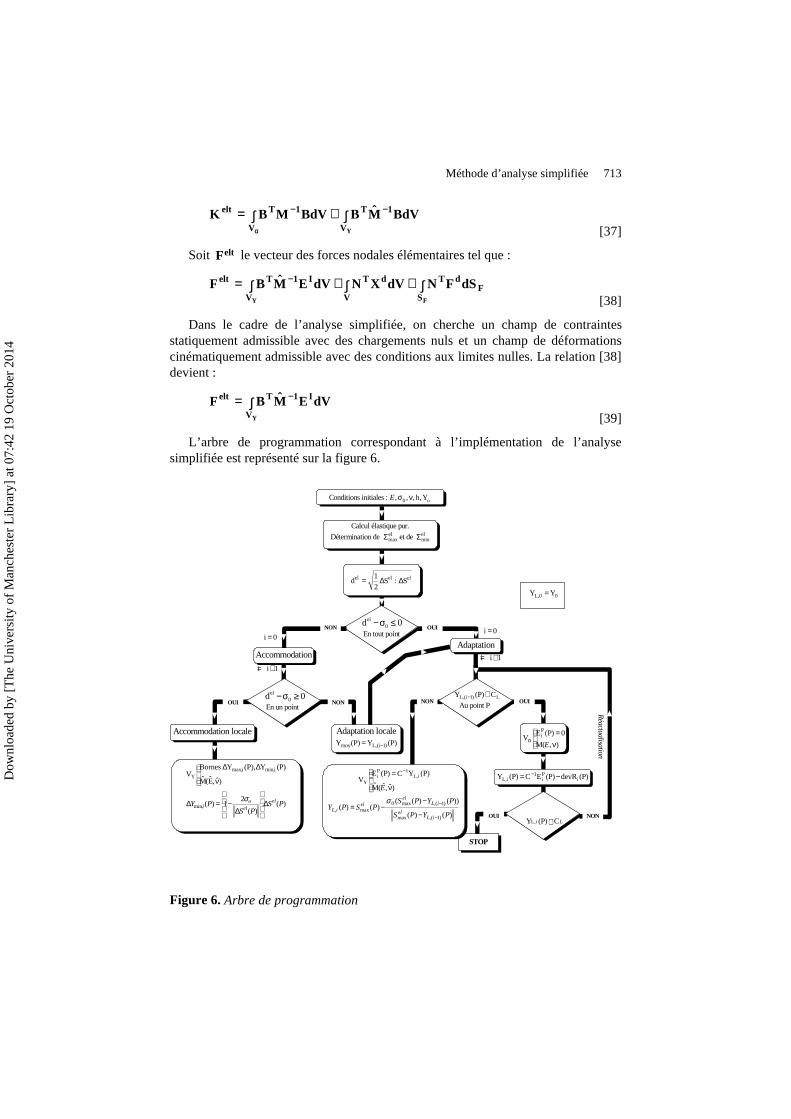
Dans le cadre de l’analyse simplifiée, on cherche un champ de contraintesstatiquement admissible avec des chargements nuls et un champ de déformationscinématiquement admissible avec des conditions aux limites nulles. La relation [38]devient :
∫= −
YV
I1Telt dVEMBF[39]
L’arbre de programmation correspondant à l’implémentation de l’analysesimplifiée est représenté sur la figure 6.
Conditions initiales : o0 Y,h,,, νσE
Calcul élastique pur.
Détermination de elmaxΣ et de el
minΣ
elelel S:S2
1d ∆∆=
En tout point
0d 0el ≤σ−
NONOUI
ν
∆∆
)ˆ,E(M
)P(Y (P),Y BornesV
imin,imax,Y
)(.)(
21)(min, PS
PSPY el
elo
i ∆
∆−=∆ σ
Accommodation locale
Accommodation
En un point0d 0
el ≥σ−
Adaptation locale)P(Y)P(Y )1i(,Lmoy −=
OUI
Adaptation
NON
ν=
α),(M
0)P(EV
Pi
E
L)1i(,L C)P(Y ∈−OUI
NON
Au point P
Li,L C)P(Y ∈OUI
1ii +=1ii +=
0i =0i =
NON
STOP
)P(devR)P(E)P(Y iPi
1i,L −= −C
00,L YY =
Réactualisation
ν
= −
)ˆ,ˆ(M
)P(Y)P(EV i,L
1Pi
YE
C
)()(
))()(()()(
)1(,max
)1(,max0max,
PYPS
PYPSPSPY
iLel
iLel
eliL
−
−
−
−−=
σ
Figure 6. Arbre de programmation
Dow
nloa
ded
by [
The
Uni
vers
ity o
f M
anch
este
r L
ibra
ry]
at 0
7:42
19
Oct
ober
201
4

714 Revue européenne des éléments finis. Volume 11 – n° 6/2002
4. Application
Cette méthode a été intégrée dans le code éléments finis SYSTUS afin del’appliquer aux structures 3D. Nous l’avons donc testée sur un crochet de levage enacier soumis à une pression répartie de flexion (figure 7). Les caractéristiquesmécaniques sont représentées dans le tableau 1.
Module de YoungE
Coefficient dePoisson ν
Limite élastiqueσ0
Moduled’écrouissage &
210 000 MPa 0,28 300 MPa 0,1 x E
Tableau 1. Caractéristiques mécaniques du crochet
Ce crochet est discrétisé 298 éléments et 1 744 nœuds (soit 5 232 degrés deliberté). Il est modélisé en éléments hexaédriques quadratiques (à 20 nœuds). Ceséléments sont sous-intégrés (8 points d’intégration) pour la résolutionélastoplastique classique (sous SYSTUS, la sous-intégration des éléments estnécessaire).
Pour l’analyse simplifiée, des tests ont été effectués pour ces mêmes éléments enconsidérant le cas avec sous-intégration (8 points d’intégration) et le cas sans sous-intégration (27 points de Gauss).
C
D
B
maxP
minP
==
MPa 0P
MPa 80P
min
max
t
Figure 7. Modélisation du crochet de levage et chargement
La face B est bloquée dans les trois directions et une pression cyclique estappliquée sur la surface D. Nous choisissons de fixer la valeur de la pressionminimum et d’appliquer un chargement maximum afin que la structure resteadaptée.
Les résultats obtenus par l’analyse simplifiée sont comparés à ceux de larésolution élastoplastique (appliquée sur la même structure, pour le mêmechargement et par le même code de calcul).
Dow
nloa
ded
by [
The
Uni
vers
ity o
f M
anch
este
r L
ibra
ry]
at 0
7:42
19
Oct
ober
201
4
Méthode d’analyse simplifiée 715
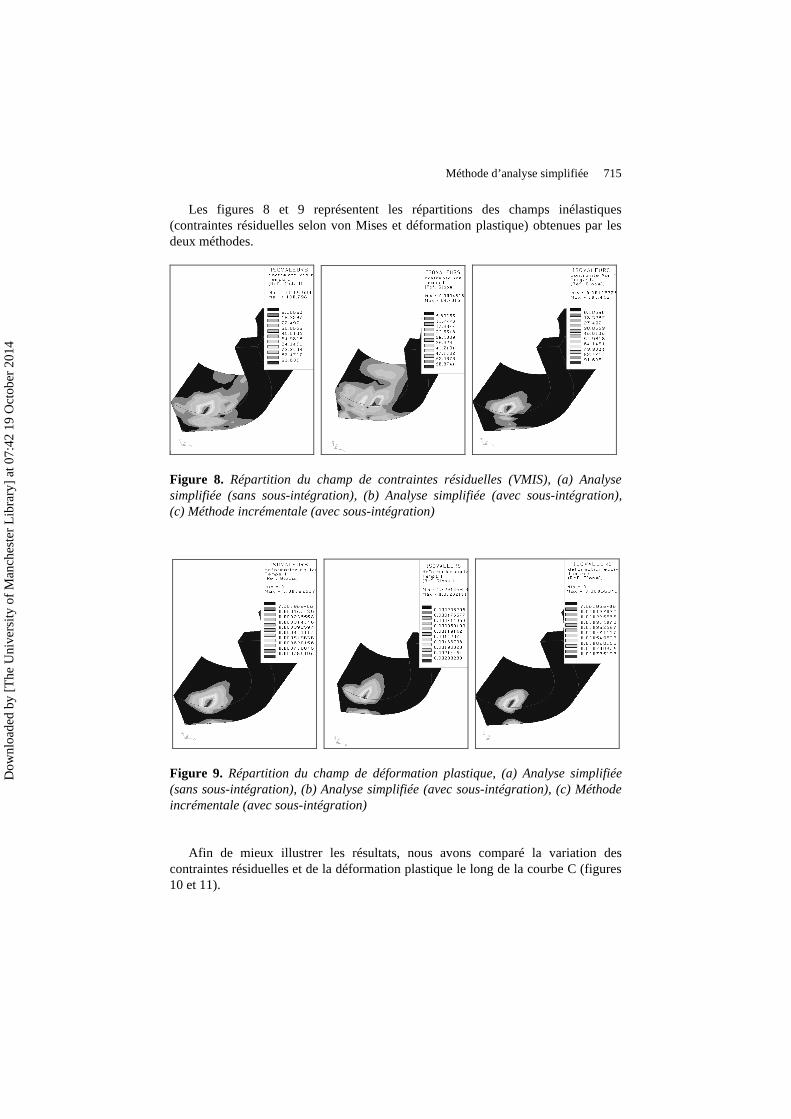
Les figures 8 et 9 représentent les répartitions des champs inélastiques(contraintes résiduelles selon von Mises et déformation plastique) obtenues par lesdeux méthodes.
Figure 8. Répartition du champ de contraintes résiduelles (VMIS), (a) Analysesimplifiée (sans sous-intégration), (b) Analyse simplifiée (avec sous-intégration),(c) Méthode incrémentale (avec sous-intégration)
Figure 9. Répartition du champ de déformation plastique, (a) Analyse simplifiée(sans sous-intégration), (b) Analyse simplifiée (avec sous-intégration), (c) Méthodeincrémentale (avec sous-intégration)
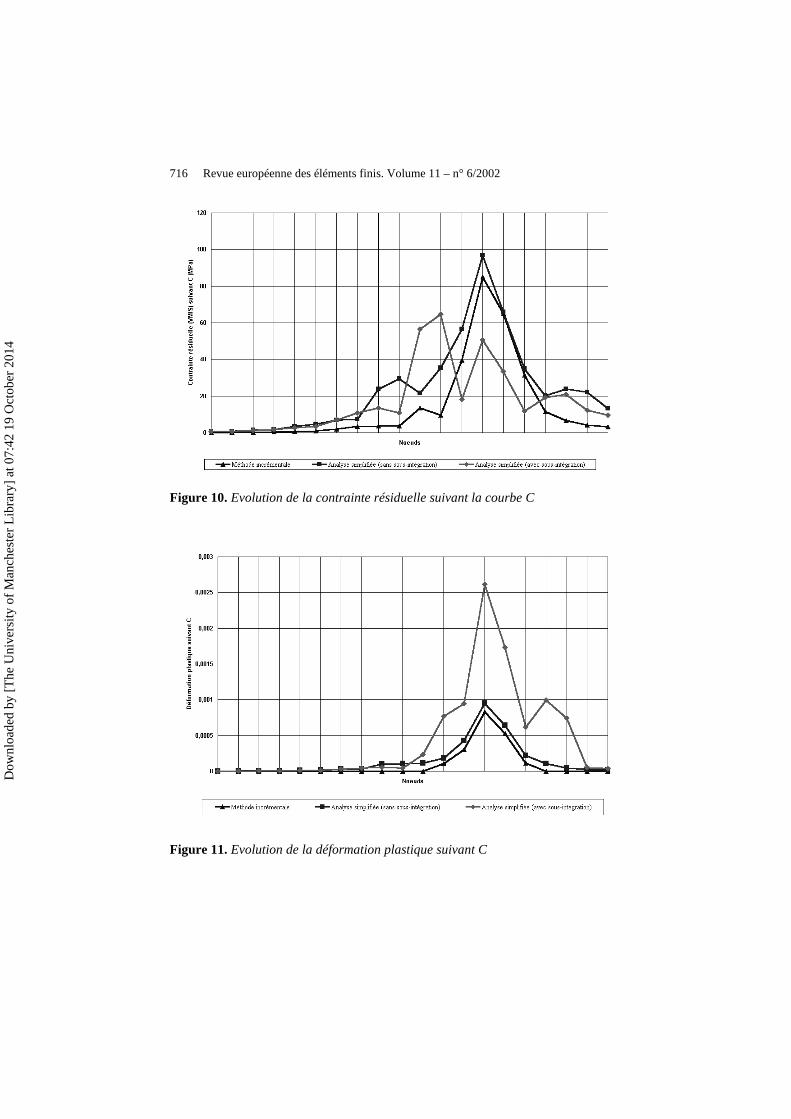
Afin de mieux illustrer les résultats, nous avons comparé la variation descontraintes résiduelles et de la déformation plastique le long de la courbe C (figures10 et 11).
Dow
nloa
ded
by [
The
Uni
vers
ity o
f M
anch
este
r L
ibra
ry]
at 0
7:42
19
Oct
ober
201
4
716 Revue européenne des éléments finis. Volume 11 – n° 6/2002
Figure 10. Evolution de la contrainte résiduelle suivant la courbe C
Figure 11. Evolution de la déformation plastique suivant C
Dow
nloa
ded
by [
The
Uni
vers
ity o
f M
anch
este
r L
ibra
ry]
at 0
7:42
19
Oct
ober
201
4

Méthode d’analyse simplifiée 717
5. Conclusion
Nous avons choisi de nous intéresser à l’intégration de la méthode d’analysesimplifiée dans le code éléments finis SYSTUS. Pour valider nos résultats nousavons adopté une approche élastoplastique classique. Nous nous sommesparticulièrement intéressé à la sous intégration des éléments des deux méthodes.
L’analyse simplifiée associée aux éléments avec sous-intégration ne nous donnepas de résultats concluants si nous les comparons à ceux de la méthodeincrémentale.
L’analyse simplifiée associée aux éléments sans sous-intégration permet uneestimation correcte des champs de déformations plastiques et de contraintesrésiduelles (au bout de trois itérations). Ceci est réalisé à coûts et à temps de calculsnégligeables : 752,79 secondes temps CPU contre 4 799,53 secondes pour larésolution élastoplastique. Le calcul simplifié nécessite donc un temps proche de1/6e du temps de calcul pas à pas effectué sachant que l’erreur relative est très faible(environ 0,3 % pour les contraintes résiduelles et 7 % pour la déformationplastique).
Ainsi, les résultats pour la charge constante montrent un très bon accord entre lecalcul simplifié et le calcul élastoplastique sachant que le nombre de points deGauss n’a pas été réduit pour le calcul simplifié.
L’intégration trop faible des éléments conduit à des problèmes d’instabiliténumérique [GMÜ 00]. Dans le cas de l’analyse simplifiée, la convergence vers unesolution cohérente avec la résolution élastoplastique dépend de cette sous-intégration.
6. Bibliographie
[BRA 91] BRAHAM S., Modélisation du galetage des vilebrequins. Evolution des contraintesrésiduelles sous chargement de service, Thèse de doctorat, école polytechnique, 1991.
[DRU 64] DRUCKER D.C., « On the postulate of stability of material in the mechanics ofcontinua », J. de Mécanique, 3, pp. 235-249, 1964.
[FRE 91] FRELAT J., Modélisation des traitements numériques de surfaces, CETIM, 1991.
[GAT 93] GATT J.M., Etude théorique et expérimentale de la déformation progressive, Thèsede doctorat, 1993.
[GMÜ 00] GMÜR T., Méthode des éléments finis en mécanique des structures, PressesPolytechniques et Universitaires Romandes, 2000.
[HAL 75] HALPHEN B., NGUYEN Q.S., « Sur les matériaux standards généralisés », J. deMécanique, 14 n° 1, pp. 39-63, 1975.
Dow
nloa
ded
by [
The
Uni
vers
ity o
f M
anch
este
r L
ibra
ry]
at 0
7:42
19
Oct
ober
201
4

718 Revue européenne des éléments finis. Volume 11 – n° 6/2002
[HAL 78] HALPHEN B., Problèmes quasi-statiques en viscoplasticité, Thèse de doctorat, Paris,1978.
[HIL 50] HILL R., The mathematical theory of plasticity, Clarendon Press, Oxford, chap. XII,1950.
[ING 84] INGLEBERT G., Analyse simplifiée des structures élasto-visco-plastiques souschargement cycliques, Thèse de doctorat, Université Paris VI1984.
[JAR 97] JARADEH Y. Analyse simplifiée de l’instabilité des structures élastoplastiques souschargements cycliques, Thèse de doctorat, ENPC, 1997.
[PRA 55] PRAGER W., The theory of plasticity : a survey of recent achievements, Proc. Inst.Mech. Engrs, London, 169, pp. 41-57, 1955.
[TRI 83] TRIBOUT J., INGLEBERT G., CASIER J., « A simplified method for the inelastic analysisof structures under cyclic loadings », Vol 105, août, Transactions of the ASME, 1983.
[VAS 96] VASSEUR E., NAVIDI P., HARIRI S., « Direct determination of limiting cycle duringcyclic loading », Computational materials Sc. 7, pp. 11-15, 1996.
[ZAR 88] ZARKA J., PECKER A., Participation à la mise au point d’une méthode d’analysesimplifiée, LMS école polytechnique, Rapport final, 1988.
[ZAR 90] ZARKA J., FRELAT J., INGLEBERT G., KASMAI-NAVIDI P., A new approach ininelastic analysis of structures, CADLM, Gif-sur-Yvette, 1990.
Dow
nloa
ded
by [
The
Uni
vers
ity o
f M
anch
este
r L
ibra
ry]
at 0
7:42
19
Oct
ober
201
4