Math 4 Agreg

of 52
-
Upload
mohamed-el -
Category
Documents
-
view
33 -
download
0
Transcript of Math 4 Agreg
-
Les Mathmatiques pourlAgrgation
C. AntoniniJ.-F. QuintP. BorgnatJ. BrardE. LebeauE. SoucheA. ChateauO. Teytaud
14 fvrier 2002
-
Table des matires
1 Calcul diffrentiel 21.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.1.1 Gnralits . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.1.2 Applications valeurs dans un produit despaces vectoriels
norms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.1.3 Applications de plusieurs variables et drives partielles . . . 6
1.2 Le thorme des accroissements finis . . . . . . . . . . . . . . . . . . 71.2.1 Rsultats principaux . . . . . . . . . . . . . . . . . . . . . . 71.2.2 Applications : interversion de limite et de drivation . . . . . 101.2.3 Applications : drives partielles et drives . . . . . . . . . . 11
1.3 Thorme dinversion locale et fonctions implicites . . . . . . . . . . 131.3.1 Thorme dinversion globale . . . . . . . . . . . . . . . . . 131.3.2 Thorme dinversion locale . . . . . . . . . . . . . . . . . . 161.3.3 Thorme des fonctions implicites . . . . . . . . . . . . . . . 17
1.4 Drives dordre suprieur . . . . . . . . . . . . . . . . . . . . . . . 181.4.1 Gnralits . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.4.2 Drives secondes . . . . . . . . . . . . . . . . . . . . . . . 191.4.3 Gnralisations la drive n-ime . . . . . . . . . . . . . . 20
1.5 Zoologie du calcul diffrentiel . . . . . . . . . . . . . . . . . . . . . 211.5.1 Fonctions convexes . . . . . . . . . . . . . . . . . . . . . . . 211.5.2 Fonction continue partout drivable nulle part . . . . . . . . . 211.5.3 Fonction drivable dans toutes les directions mais non continue 231.5.4 Varits de Rn, thorme de Jordan . . . . . . . . . . . . . . 241.5.5 Espaces vectoriels norms de dimension finie . . . . . . . . . 26
2 Extrema 282.1 Cadre et dfinitions . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.2 Rsultats lis la compacit . . . . . . . . . . . . . . . . . . . . . . 282.3 Rsultats de calcul diffrentiel . . . . . . . . . . . . . . . . . . . . . 29
2.3.1 Rsultats au premier ordre . . . . . . . . . . . . . . . . . . . 292.3.2 Rsultats du second ordre . . . . . . . . . . . . . . . . . . . 29
2.4 La convexit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.5 Pour aller plus loin . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3 Equations diffrentielles 313.1 Lemmes prliminaires . . . . . . . . . . . . . . . . . . . . . . . . . 313.2 Equations diffrentielles dordre 1 . . . . . . . . . . . . . . . . . . . 32
3.2.1 Avec des hypothses sympathiques sur f . . . . . . . . . . . 32
1
-
www.L es-M athematiques.net
3.2.2 Sans hypothse sympathique sur f . . . . . . . . . . . . . . . 353.3 Equation diffrentielle dordre n . . . . . . . . . . . . . . . . . . . . 363.4 Zoologie des quations diffrentielles . . . . . . . . . . . . . . . . . 37
3.4.1 Equation diffrentielle linaire du premier ordre . . . . . . . . 373.4.2 Equations diffrentielles autonomes . . . . . . . . . . . . . . 423.4.3 Equation de la chaleur . . . . . . . . . . . . . . . . . . . . . 433.4.4 Equations variables spares . . . . . . . . . . . . . . . . . 453.4.5 Equation de Bernoulli . . . . . . . . . . . . . . . . . . . . . 453.4.6 Equation de Ricatti (polynme coefficients dpendant de t de
degr 2 en x) . . . . . . . . . . . . . . . . . . . . . . . . . . 453.4.7 Equations homognes . . . . . . . . . . . . . . . . . . . . . 463.4.8 Equation de Lagrange . . . . . . . . . . . . . . . . . . . . . 46
4 Formes diffrentielles 474.1 Gnralits, rappels sur les applications multilinaires . . . . . . . . . 47
4.1.1 Dfinition dune forme diffrentielle . . . . . . . . . . . . . . 474.1.2 Proprits des applications multilinaires . . . . . . . . . . . 484.1.3 Application de tout a aux formes diffrentielles . . . . . . . 49
2
-
Chapitre 1
Calcul diffrentiel
Il est recommand de bien matriser la partie?? avant dtudier cette partie, et no-tamment les espaces de Banach.
3
-
1.1 Introduction1.1.1 Gnralits
Dfinition 1 SoientE et F des espaces vectoriels norms et U un ouvert deE.Soit une application f : U F , on dit que f est diffrentiable (ou drivable)en x U sil existe une application linaire continue de E dans F telle que
limh0f(x+ h) f(x) (h)
h = 0
On appelle la diffrentielle ou drive de f en x, on la note Df(x).f est dite diffrentiable si elle est diffrentiable en tout point de U .
Proposition 2 Si f est drivable en x, alors f est continue en x. La drive de f est unique et
Df(x)(h) = limt0f(x+ t.h) f(x)
t
La notion de drive ne dpend que des topologies et pas des normes (dumoment quelles dfinissent la mme topologie) ; si deux normes sont qui-valentes, alors une fonction diffrentiable pour lune est diffrentiable pourlautre, et la diffrentielle est la mme. D(f + g)(x) = Df(x) + Dg(x) Si E = K corps associ aux espaces vectoriels E et F , alors la diffrentia-bilit quivaut lexistence de la limite pour t 0 de f(x+t)f(x)t . On notealors cette limite f (x), et Df(x)(t) = t.f (x). Lapplication qui une application diffrentiable en x0 associe sa diffren-tielle en X0 est une application linaire de lespace vectoriel des applicationsde E dans F diffrentiables en x0 dans lespace vectoriel des applications li-naires de E dans F . Une application linaire continue f est diffrentiable en tout point x0 etDf(x0)(h) = f(h).
Dmonstration : Un peu laborieux mais rien de bien difficile, en notant (x, h) =f(x+ h) f(x)Df(x)(h), pour h suffisamment petit pour que x+ h appartienne U .uunionsq
4
-
Dfinition 3 Soient E et F des espaces vectoriels norms et U ouvert de E. fde U dans F est de classe C1 si elle est diffrentiable et si lapplication qui x associe la diffrentielle de f en x est continue (voir ?? pour un rappel de latopologie usuelle sur L(E,F )) .
Proposition 4 Si f est constante sa drive est nulle partout, f est C1. Si deE dans F est linaire continue, alors est C1 avecD(x) = , pourtout x. Si f de E1E2 ...En dans F est multilinaire continue, alors f est C1,et on a
Df(x1, ..., xn)(h1, ..., hn) =ni=1
f(x1, x2, ..., xi1, hi, xi+1, ..., xn)
Dmonstration : pas dur, tout a !uunionsq
Thorme 5 (Diffrentielle de fonctions composes) Soit E,F et G des es-paces vectoriels norms , et U et V des ouverts de E et F respectivement. Sif de U dans V est diffrentiable en x et g de V dans G est diffrentiable enf(x), alors la compose g f est diffrentiable en x et a pour diffrentielle
D(g f)(x) = Dg(f(x)) Df(x)
Si g et f sont C1 alors g f est C1.
Dmonstration : on crit comme pour dautres preuves f(x + h) = f(x) +Df(x)(h) + (h) h , et de mme g((f(x) + k), et on calcule...Pour voir que la compose est C1, il suffit de voir que la diffrentielle est la composede 3 fonctions continues.uunionsq
Dfinition 6 (Isomorphisme despaces norms) Un isomorphisme de les-pace vectoriel norm E sur lespace vectoriel norm F est une applica-tion : E F linaire continue et bijective dinverse continue. On noteIsom(E,F ) le sous-ensemble de L(E,F ) form des isomorphismes de Edans F .
Thorme 7 Soient E et F des espaces de Banach. Le sous-ensembleIsom(E,F ) est ouvert dans L(E,F ). Lapplication inv : Isom(E,F ) Isom(F,E) qui u associe u1 est C1 avec Dinv(u)(v) = u1.v.u1.
Dmonstration : Soit u0 un isomorphisme de E vers F ; alors u0 + v = u0.(Id+
5
- u10 .v). Si v
-
1.1.3 Applications de plusieurs variables et drives partielles
Proposition 11 (Dfinition des drives partielles) Soit U un ouvert du pro-duit E1 E2 de deux espaces vectoriels norms , soit f : U F , avec Fespace vectoriel norm , et f diffrentiable en a = (a1, a2). Alors les deuxapplications partielles x1 7 f(x1, a2) et x2 7 f(a1, x2) sont diffrentiablesrespectivement en a1 et a2. On note les deux diffrentielles obtenues respec-tivement D1f(a1, a2) et D2f(a1, a2), ou bien fx1 et
fx2
, et on les appellesrespectivement premire drive partielle et deuxime drive partielle. Ona alors
Df(a1, a2)(h1, h2) = D1f(a1, a2)(h1) +D2f(a1, a2)(h2)
On peut gnraliser de mme un produit fini despaces vectoriels norms ;si f est diffrentiable en (a1, a2, ..., an), alors pour tout i dans [1, n] x 7f(a1, ..., ai1, x, ai+1, ..., an) est diffrentiable en ai, sa diffrentielle en aiest not fxi (a), et
Df(a1, ..., an)(h1, ..., hn) =ni=1
f
xi(a)(hi)
Dmonstration : Facile !uunionsq
Il ny a pas de rciproque dans le cas gnral ! Mme si toutes les drives par-tielles sont dfinies la diffrentielle nest pas ncssairement dfinie. Par contre si lesdiffrentielles partielles sont continues alors on peut conclure que f est diffrentiableet mme C1 (voir partie 1.2.3).
Thorme 12 Soit E un espace de Banach , U un ouvert de E et F1, ..., Fndes espaces de Banach . Soit f de U dans F1 ... Fn.On note pi(x1, ..., xn) = xi.Alors f est diffrentiable en x si et seulement si chacune des application fi deE dans Fi y 7 pi(f(x)) est diffrentiable en x et on a alors
Df(x)(h) = (Df1(x)(h1), Df2(x)(h2), ..., Dfn(x)(hn))
Dmonstration : Le sens "seulement si" est clair ; une compose dapplicationsdiffrentiables est diffrentiable. Le sens "si" et lgalit annonce sobtiennent simplement en considrant
f =ni=1
ui fi
7
-
avec ui(x) = (0, ..., 0, x, 0, , , 0).uunionsq
Dfinition 13 Eventuellement on peut avoir U ouvert de Rn et F = Rm ;on peut alors noter la diffrentielle sous forme matricielle ; cette matrice estappele matrice jacobienne. Elle est de la forme :
f1x1
f1x2
... f1xnf2x1
f2x2
... f2xn.
.
.
.
.
.
.
.
.
.
.
.
fmx1
fmx2
... fmxn
Si n = m, la matrice jacobienne est carre, on peut donc considrer son d-terminant, appel jacobien de f .
1.2 Le thorme des accroissements finis1.2.1 Rsultats principaux
Dfinition 14 Soient a et b dans R, avec a < b, et F un espace vectorielnorm . Une application f de [a, b] dans F est dite drivable droite en xappartenant [a, b[ si la limite droite limh0,h>0 f(x+h)f(x)h existe ; onlappelle alors drive droite de f en x.
Thorme 15 (Thorme des accroissements finis) Soient a et b dans Ravec a < b, et F un espace vectoriel norm . On suppose que les deux fonc-tions f : [a, b] F et g : [a, b] R sont continues sur [a, b] et drivables droite sur [a, b] \D avec D au plus dnombrable. Si, pour tout t [a, b] \Don a f d(t) gd(t), alors f(b) f(a) g(b) g(a).
Dmonstration : On note D = {d1, d2, d3, ...} avec di < di+1 On se donne > 0. On considre E lensemble des x tels que
f(x) f(a) > g(x) g(a) + .(x a) + .di a, car pour x assez petit, lingalit 1.1 est fausse x0 6 E, car E est ouvert ; donc
f(x0) f(a) g(x) g(a) + .(x a) + .di
-
On va maintenant distinguer deux cas, selon que c appartienne D ou non.- Si x0 D, alors x0 = di0 pour un certain i0. Alors par continuit pour x > x0suffisamment proche de x0, on a
f(x) f(x0) g(x) g(a) + .(x c) + .2i0 (1.3)
(par continuit). Or pour x > x0 on adi x0 ; ce qui est contradictoire puisque E est ouvert. On a alors montr que E est vide, et donc il suffit de faire tendre vers 0 pour avoirle rsultat dsir.uunionsq
Corollaire 16 On a le mme rsultat en remplaant les drives droite parles drives gauche.
Dmonstration : Facile, en remplaant x par x !uunionsq
Corollaire 17 Une fonction continue de R dans un espace vectoriel normdont la drive existe et est nulle sauf sur un ensemble au plus dnombrableest constante.
Dmonstration : Facile !uunionsq
on utilise le thorme des accroissements finis pour les thormes 39, 28, 35,??, ??, ??.
On lutilise aussi pour montrer quune fonction drivable drive borne est lip-schitzienne, ou bien quune fonction C1 est localement lipschitzienne applicationsaux quations diffrentielles.
Proposition 18 Une fonction f continue de R dans R dont la drive existe etest positive sauf sur un ensemble au plus dnombrable est croissante.
Dmonstration : Lastuce rside dans le fait que la fonction f dont il est questionici doit jouer le rle de la fonction g du thorme des accroissements finis ! On utilise
9
-
pour f une fonction nulle, donc de drive nulle ; on considre une fonction g de dri-ve positive, et le tour est jou !uunionsq
Corollaire 19 Ingalit des accroissements finis f dfinie de louvert U delespace vectoriel norm E et valeurs dans lespace vectoriel norm F . Si fest drivable et si le segment [x, y] est inclus dans U , alors
f(y) f(x) y x .supz[x,y] Df(z)
Dmonstration : Si le sup est infini il ny a rien prouver. Sinon on considre lafonction qui un rel t compris entre 0 et 1 associe yx.(supz[x,y]Df(z)).t ; est drivable, en tout point, de drive constante gale yx.(supz[x,y]Df(z)),que lon va noter C. Lapplication qui t [0, 1] associe f((1 t).x + t.y) estdrivable en tout point de [0, 1], de drive Df((1 t).x + t.y)(y x). La norme decette drive est majore par , donc par C. On peut donc majorer (1) (0) par(1) (0).uunionsq
Corollaire 20 Une application dfinie sur un ouvert U de lespace vectorielnorm E valeurs dans lespace vectoriel norm F drivable et de drivenulle est localement constante. Si U est connexe, f est constante.
Trois corollaires (pour le deuxime il faut un peu y rflchir, pour le troisime cestune consquence du second) :
Corollaire 21 En dfinissant la distance entre deux points dun ouvertconnexe comme la longueur inf dune ligne brise entre ces deux points (voirla partie topologie pour vrifier quun ouvert connexe dun espace vectorielnorm est connexe par arcs et que toute paire de points dans un tel ensemblepeut tre relie par une ligne brise), et en supposant que f est une applicationde cet ouvert dans un espace vectoriel norm diffrentiable telle que pour toutx f (x) k, alors f(b) f(a) est infrieur ou gal k fois la distancede a b.
Dfinition 22 Une application localement lipschitzienne est une applicationentre espaces mtriques telle que pour tout x il existe un voisinage de x surlequel la restriction de f est lipschitzienne.
Corollaire 23 Une application de classe C1 est localement lipschitzienne.
10
-
1.2.2 Applications : interversion de limite et de drivation
Dfinition 24 (Convergence uniforme, rappel) Une suite dapplications fnde X dans Y avec X et Y espaces mtriques converge uniformment vers fapplication de X dans Y si
limn+supxXd(fn(x), f(x)) = 0
Proposition 25 Si les fn sont continues et convergent uniformment vers falors f est continue.
Dmonstration :
d(f(x), f(y)) d(f(x), fn(x)) + d(fn(x), fn(y)) + d(fn(y) f(y)
Etant donn l suffit alors de prendre n assez grand et x et y assez proches pour quef(x) f(y) .uunionsq
Ce rsultat servira par exemple pour le thorme ??, ou le thorme 47.
Thorme 26 On suppose E et F des espaces vectoriels norms , U ouvertde E, fn une suite dapplications de U dans F diffrentiables, fn convergeantsimplement vers f , les Dfn convergeant uniformment vers une certaine ap-plication g de U dans L(E,F ),alors : f est diffrentiable et Df = g Pour tout C convexe et born inclus dans U la convergence de fn|C vers f|Cest uniforme Si les fn sont C1 alors f est C1.
Dmonstration : laborieuse, mais pas vraiment difficile ; il suffit dcrire n =supxUDfn(x) g(x), avec n tendant vers 0 lorsque n tend vers linfini, et demontrer que supyCf(y) fn(y) f(x) fn(x)+ n.D avec D le diamtre deC pour voir la deuxime proprit ; la premire proprit se montre facilement partirde l, et la troisime est un corollaire de la proposition 25.uunionsq
11
-
Corollaire 27 On suppose U connexe ouvert de E et fn de U dans F dri-vable ; E et F sont des espaces vectoriels norms , et F est complet (donc Fest un Banach). On suppose quil existe x0 tel que fn(x0) converge, et que pourtout x il existe Vx voisinage de x tel que la suite des Dfn|Vx soit de Cauchypour la mtrique d dfinie par
d(f, g) = supzVxf(z) g(z)
(cest dire que la suite des Dfn converge normalement sur un certain voisi-nage de tout point)Alors il existe f de U dans F tel que : f est drivable en tout point la suite des fn converge vers f (simplement) tout x possde un voisinage Vx tel que les convergences de fn et Dfn res-treints Vx soient uniformes. Si les fn sont C1, f lest aussi.
Dmonstration : On dfinit lensemble A des z tels que fn(z) converge. Etantdonn x on considre un voisinage Vx de x convexe et vrifiant lhypothse sur lecritre de Cauchy (on peut toujours imposer Vx convexe en le restreignant une boule).On dfinit alors n,m = supzVxDfn(z)Dfm(z) ; par hypothse, n,m tend vers0 quand n et m tendent vers linfini. Si Vx A 6= , alors soit x dans Vx A. Parconvexit de Vx, on peut crire pour tout y dans Vx :
[fm(y) fn(y)] [fm(x) fn(x)] n,m.y x
or fn(x) est une suite de Cauchy (comme toute suite convergente dans un mtrique),donc fn(y) est une suite de Cauchy, et donc converge. Donc si Vx A 6= , Vx A.Donc soit Vx A, soit Vx Ac, donc A et Ac sont ouverts. A tant non vide et Utant connexe, A = U . On a donc montr la deuxime assertion.L(E,F ) est complet pour la norme uniforme puisque F lest ; donc la suite des d-rives sur Vx converge uniformment. En appliquant le thorme prcdent, on voitque f est drivable de drive la limite des drives ; en supposant Vx born on a alorsfn|Vn f|Vx uniformment, toujours par le thorme prcdent.uunionsq
1.2.3 Applications : drives partielles et drives
Proposition 28 E1, E2, ... , En et F des espaces vectoriels norms ; U unouvert de E = iEi, f une application de U dans F ; alors si les fxi existentsur un voisinage de x et sont continues en x, alors f est diffrentiable en x.
Dmonstration : Il est suffisant de montrer que
f(x1, ..., xn) f(a1, ..., an)ni=1
f
xi(a).(xi a) = o(x a)
12
-
pour tout (a1, ..., an) de U . Pour cela on dcompose f(x1, ..., xn) f(a1, ..., an)
ni=1
fxi
(a).(xi a)en
f(x1, ..., xn) f(a1, x2, ..., xn) fx1
(a).(x1 a1)
+f(a1, x2, ..., xn) f(a1, a2, x3, ..., xn) fx2
(a).(x2 a2)+...
+f(a1, a2, ..., ai, xi+1, ..., xn)f(a1, ..., ai+1, xi+2, ..., xn) fxi+1
(a).(xi+1ai+1)
+...
+f(a1, a2, ..., an1, xn) f(a1, ..., an) fxn
(a).(xn an)
Il suffit ensuite de montrer que pour xi tendant vers ai, f(a1, a2, ..., ai1, xi, ..., xn)f(a1, ..., ai, xi+1, ..., xn) fxi (a).(xi ai) est un o(xi ai). (ensuite il suffira desommer) Le fait ci-dessus provient des accroissements finis ET de la continuit de la i-ime
drive partielle (en effet une application directe des accroissements finis donnent uno(xi ai) pour
f(a1, ..., ai1, xi, ..., xn)f(a1, ..., ai, xi+1, ..., xn) fxi
(a1, ..., ai, xi+1, ..., xn).(xiai)
(la diffrentielle nest pas prise l o il faudrait quelle le soit) uunionsq
Thorme 29 E1, E2, ... , En et F des espaces vectoriels norms ; U un ou-vert de E = Ei, alors f application de U dans F est C1 si et seulement siles drives partielles fxi de f existent et sont continues sur U .
Dmonstration : Il est clair que si f est C1, alors les drives partielles existentet sont continues. La rciproque, utilisant la proposition prcdente, ne prsente pas dedifficult majeure.uunionsq
On pourra par exemple trouver une application dans la partie??.
13
-
1.3 Thorme dinversion locale et fonctions implicites1.3.1 Thorme dinversion globale
Dfinition 30 On appelle application contractante ou contraction une ap-plication lipschitzienne dont le coefficient de Lipschitz est < 1.
Thorme 31 (Thorme de Banach du point fixe) Soit X un espace m-trique complet et h une contraction de X dans X . Alors : h admet un unique point fixe x0 x d(x, x0) 11Lip(h)d(x, h(x))
Dmonstration : Unicit : Supposons x1 et x2 deux points fixes. d(x1, x2) = d(h(x1), h(x2)) Lip(h).d(x1, x2) ; donc x1 = x2Existence : Considrons x quelconque dans X , on va travailler sur la suite des hn(x). Supposons n m, alors
d(hm(x), hn(x)) n1i=m
d(hi(x), hi+1(x))
+i=m
Lip(h)i.d(x, h(x)) Lip(h)m
1 Lip(h) .d(x, h(x))
On en dduit facilement les deux rsultats annoncs.uunionsq
Il faut que f soit une contraction, cest dire une application lischitziennede constante de Lipschitz < 1 ; avec un rapport 1 cela ne marche pas, ni mme avecd(f(x), f(y)) < d(x, y). Par exemple, x 7 x + ex dfinit une application de R+dans R+, R+ est bien complet, et on a bien d(f(x), f(y)) < d(x, y), et pourtant fnadmet pas de point fixe.
thorme dinversion locale 35, thorme de Cauchy-Lipschitz 72, la rsolutionde lquation de Volterra (voir [6]).
Dautres thormes de points fixes existent : par exemple le thorme du pointfixe de Brouwer ?? (avec pour application le corollaire ??), le thorme de Kakutani, le thorme de Schauder , et mme pour ceux qui connaissent un peu la calculabi-lit un thorme de point fixe que lon trouvera dans le livre "Thorie de la rcursionpour la mtamathmatique", de R. Smullyan (Masson, 1995), avec pour application lethorme de Rice et ses multiples consquences (attention, il faut connatre un peu le
14
-
domaine pour pouvoir se lancer dans ce genre doriginalits...).
Lemme 32 SoientU et V des ouverts des espaces normsE et F . On se donneh de U dans V , h bijective, drivable en x0. Alors h1 est drivable en h(x0)si et seulement si les deux conditions suivantes sont vrifies : Dh(x0) est un isomorphisme de E sur F Il existe K 0 et un voisinage W de h(x0) dans F tels que
y Wh1(y) x0 Ky h(x0)
Dmonstration : Tout dabord montrons que ces deux conditions sont ncssaires.Pour cela on suppose queffectivement h1 est drivable en h(x0), et on procdecomme suit : On drive les deux expressions
h1 h = IdEet
h h1 = IdEet on montre bien que Dh(x0) est un isomorphisme. Par dfinition de la drive, la quantit ci-dessous tend vers 0 pour y h(x0) :
h1(y) h1(h(x0))D(h1)(h(x0))(y h(x0))y h(x0)
Donc pour y dans un certainW cette quantit est plus petite que 1, et donc pour y Won a
h1(y) h1(h(x0)) Ky h(x0)avec K = 1 + D(h1)(h(x0)).
Il reste prouver la rciproque, cest dire que les conditions sont suffisantes. Par dfinition, on a
h(x) h(x0) = Dh(x0)(x x0) + x x0(x)avec (x) tendant vers 0 pour x x0.En composant avec Dh(x0)1 (dont les hypothses garantissent lexistence), on ob-tient
x x0 = Dh(x0)1(h(x) h(x0)) x x0.(Dh(x0)1((x)))avec y = h(x) (tout y de V peut scrire ainsi) et y0 = h(x0), on obtient alorsh1(y)h1(y0)Dh(x0)1(yy0) = Dh(x0)1.(h1(y)).h1(y)h1(y0)On sait par hypothse que pour y assez proche de y0 on a h1(y) h1(y0) K.y y0, donc
Dh(x0)1.(h1(y)).h1(y) h1(y0)y y0 K.Dh(x0)
1.(h1(y))
15
-
or h1(y) tend vers x0 quand y y0 donc cette quantit tend vers 0 ; ce qui permetde conclure.uunionsq
Thorme 33 (Thorme dinversion globale) Soit A une application li-naire continue de E dans F , avec E un espace de Banach et F un espacenorm, telle que A1 existe et est continue (A est un homomorphisme li-naire). Soit une application lipschitzienne de E dans F telle que Lip() 1 Pour i = 1 il suffit de rappeler que f (n) = (f (n2)) et dutiliser 39.uunionsq
21
-
1.5 Zoologie du calcul diffrentiel1.5.1 Fonctions convexes
Dfinition 45 Une fonction f dfinie sur un convexe U dun espace vectoriel valeurs dans R est dite convexe (resp. strictement convexe) si
(u, v, t) U2 [0, 1]f(tu+ (1 t)v) tf(u) + (1 t)f(v)
(resp.)(u, v, t) U2]0, 1[u 6= v f(tu+(1 t)v) < tf(u)+(1 t)f(v)
Dans la suite de cette section, on suppose que U est un convexe dun espace vec-toriel , et que f est une application de dans R, avec ouvert contenant U . Les liensentre drivabilit et convexit sont les suivants :
Thorme 46 f C1 est convexe (resp. strictement convexe) sur U si et seule-ment si
(u, v) U2f(v) f(u) + f (u)(v u)(resp.)(u, v) U2u 6= v f(v) > f(u) + f (u)(v u)
f C2 est convexe si et seulement si
(u, v) U2f (u)(v u, v u) 0
Si(u, v) U2u 6= v f (u)(v u, v u) > 0
On pourra voir 2.4 pour les applications de la convexit la recherche dex-trma, ?? pour les applications de lingalit de Jensen, le lemme ?? (et par suite lin-galit de Hlder), lingalit de Minkovski.
1.5.2 Fonction continue partout drivable nulle partCet exemple, labor par Van der Waerden, est extrait du livre [20].
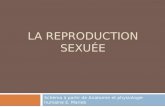
Thorme 47 Soit T la fonction dfinie sur R par T (x) = min(x E(x), E(x) + 1 x) (cest dire que T (x) est la distance de x lentierle plus proche de x).La fonction f dfinie sur R par f(x) = n=0 T (10nx)10n est continue partoutdrivable nulle part.
Dmonstration : Bonne dfinition, continuit de f : facile, f est limite uniforme dune suite de
fonctions continues (voir proposition 25). La non drivabilit, cest plus dur.
22
-
- T , et donc f , est priodique, de priode 1.- On se limite donc montrer la non-drivabilit sur [0, 1[- On note les dveloppements dcimaux en excluant les dveloppements illimits
ne comportant que des 9 1- Soit donc x [0, 1[, on montre la non-drivabilit de f en x.- Soit xn la n-ime dcimale de x.- dfinissons hm = 10m si xm = 4 ou xm = 9, hm = 10m sinon.- Calculons maintenant
f(x+ hm) f(x)hm
= 10mn=1
n(T (10n(x+ m10m)) T (10nx))
10n
- Raisonnons un petit peu maintenant, sur un cas particulier pour mieux visualiser(x = 0.33333333...) :
n 10nx 10n(x+ hm) T (10n(x+ hm)) T (10nx) 10mn0 0, 333333 . . . 0, 33 . . . 333433 . . . 0, 000 . . . 001 11 3, 33333 . . . 3, 33 . . . 334333 . . . 0, 000 . . . 01 12 33, 3333 . . . 33, 3 . . . 343333 . . . 0, 000 . . . 1 1.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
m 333 . . . 3, 33 . . . 333 . . . 4, 333 . . . 1 1m+ 1 3333 . . . 3, 33 . . . 333 . . . 43, 333 . . . 0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Il faut bien noter que dans le cas gnral le chiffre de la dernire colonne peut tre1 ou 1 ; quoi quil en soit f(x+hm)f(x)hm est un entier de parit variant avec m et nepeut donc pas converger.uunionsq
On en profite pour montrer ce dont est capable Maple. Le dessin se trouve en figure1.2.
Exemple Maple
> T := x min(x floor(x), floor(x) + 1 x)
T := x min(x floor(x), floor(x) + 1 x)> g := x > sum(T (2n x)/2n, n = 0..17);
g := x17n=0
T(2n x)2n
1Au profit de lquivalent obtenu en remplaant ...243999999999... par ...2449999999999....
23
-
x10.80.60.40.2-0.2-0.4-0.6-0.8-1
0.6
0.5
0.4
0.3
0.2
0.1
FIG. 1.2 Trac dune courbe continue drivable nulle part, tablie par Van der Waer-den
1.5.3 Fonction drivable dans toutes les directions mais non conti-nue
Dfinition 48 Soit f une application dun ouvert U dun espace vectorielnorm E dans un espace vectoriel norm F , alors f est dite diffrentiable enx U suivant la direction e E si lapplication g : R F t 7 f(x+ tu)est diffrentiable en 0. La diffrentielle de g en 0 est alors appele diffren-tielle de f en x suivant u.
Proposition 49 Il existe une application f diffrentiable dans toutes les direc-tions en x et qui nest pas continue en x.
Dmonstration : Le livre [20] propose la fonction f : R2 R, (x, y) 7 x5(yx2)2+x8 ,avec f(0, 0) = 0. On constate la non continuit de f en regardant la limite de x 7f(x, x2) en 0. La diffrentiabilit suivant toutes les directions est vite vue (distinguerdiffrents cas, suivant u = (a, b), cas a et b non nuls, cas a nul, ou cas b nul).
On peut aussi regarder la fonction dfinie par ses coordonnes polaires par
f(r cos(), r sin()) = e(r)2r4
Avec f(0, 0) = 0, on a bien une fonction diffrentiable dans toutes les directions (avecdes diffrentielles nulles !), et on constate sans le moindre calcul que f(xcos(x), xsin(x))est constant gal 1 pour x 6= 0.uunionsq
24
-
1.5.4 Varits de Rn, thorme de Jordan
Dfinition 50 - Proposition[Varit de Rn] Soit M une partie de Rn, x unpoint de M . Soit p un entier > 0 et k un entier > 0.M est par dfinition une varit de dimension p et de classe Ck au voisinagede x si lune des conditions quivalentes suivantes est vrifie :(i) Il existe V voisinage ouvert de x tel quil existe un Ck diffomorphisme deV sur W Rn tel que g(x) = 0 et g(M V ) = W P , avec P lensembledes (y1, ..., yn) tels que yp+1 = 0, yp+2 = 0, ... , yn = 0.(ii) Aprs une permutation pertinente des coordonnes (x1, ..., xn), il existe Vvoisinage ouvert de x et application Ck de Rp dans Rnp tel que pour touty dans V
y M (y1, ..., yp) = (yp+1, ..., yn)(iii) Il existe un voisinage V ouvert de x, un voisinage ouvert de 0 dans Rp,f une application Ck de dans Rn, tels que f induise un homomorphismede sur M V , f(0) = x et f (0) de rang p a.(iv) Il existe un voisinage V ouvert de x, un voisinage ouvert de 0 dans Rp,f une application Ck de dans Rn, tels que f induise un homomorphismede sur M V , f(0) = x et f (y) de rang p pour tout y dans b.
aIl sagit dun lment de L(Rp,Rn).bIl sagit dun lment de L(Rp,Rn).
Dmonstration :On notera pendant cette preuve x|I , avec I = {i1, ..., im} et i1 < i2 < < im
un sous-ensemble de [1, n] et x un lment de Rn, (xi1 , . . . , xim). Lquivalence entre (iii) et (iv) est claire ; bien sr (iv) implique (iii), et rcipro-
quement en supposant (iii) par continuit de la diffrentielle et continuit du dtermi-nant dune matrice extraite, on peut trouver un voisinage de 0 dans lequel la diffren-tielle a le mme rang. Il suffit alors de se restreindre ce voisinage. Voyons maintenant que (iii) implique (ii).Supposons (iii). La matrice de la diffrentielle de f en 0 est de rang p ; modulo
une bonne permutation des coordonnes, on peut donc supposer que la matrice extraitede la diffrentielle pour les indices en ligne et en colonne infrieurs ou gaux p estinversible.
En se restreignant aux p premire coordonnes, f est alors Ck, de diffrentielle en0 de rang plein. On peut donc appliquer le thorme dinversion locale 35, et f ainsirestreint est donc un Ck diffomorphisme au voisinage de 0. En prenant la composede f et de linverse de la restriction de f aux p-premires coordonnes, on obtient unefonction satisfaisant (ii). Voyons maintenant (ii) implique (iii).Supposons (ii) vrifie. Dfinissons alors f(y) = (y + x|[1,p], (y + x|[1,p])2. f
convient...Montrons maintenant que (iii) implique (i).Supposons (iii) vrifie.Dfinissons alors g(y) = (y|[1,p] x|[1,p], y|[p+1,n] (y|[1,p])... g convient pour
(i).2Je "recolle" ainsi un lment de Rp et un lment de Rnp pour obtenir un lment de Rn
25
-
Il ne reste plus qu vrifier que (i) implique (iii).Supposons donc (i) vrifie.Alors soit f(y) = g1(y|[1,p], 0, . . . , 0).La diffrentielle de g est injective, donc la restriction Rp est injective aussi. Donc
f vrifie bien (iii).uunionsq
Thorme 51 (Thorme de Jordan) Toute hypersurface M (i.e. varit dedimension n 1) de Rn C est le noyau dune application C dont la diffrentielle ne sannule pas surM . est orientable (cest dire quil existe un champ de vecteur ne sannulantpas, continu, dfini sur M , valeurs dans Rn) partage le plan en deux domainesa (lun born lautre non) dont elle est lafrontire commune.
aRappelons quun domaine est un ouvert connexe.
Dmonstration :Ce thorme, long et loin dtre trivial, ncssitera diffrents lemmes. Cette preuve
est largement inspir de la note "Le thorme de Jordan pour les hypersurfaces C",de D. Leborgne, paru dans la Revue de Maths Sp numro 104, 1993-1994, lui-mmeinspir de larticle "Orientability of smooth hypersurfaces and the Jordan Brouwer se-paration theorem", Expo. Math. 5 (1987), p 283-286.
Lemme 52 Soit X un espace topologique connexe, et f et g continues de XdansR. Si f et g sont localement gales ou opposes, et si lintrieur de f1(0)est rduit lensemble vide, alors f et g sont gales ou opposes.
Dmonstration : Dfinissons :
Egales = {x/f(x) = g(x)}Oppos = {x/f(x) = g(x)}
Et notons lintrieur de Egales. Supposons tout dabord non vide, et montrons que = X . Si on a un tel rsul-
tat, alors on saura que soit Egales est dintrieur vide, soit il est gal tout lespace.Si Egales est gal tout lespace, alors on a bien le rsultat souhait. Si Egales estdintrieur vide, alors lensemble des x tels que f(x) = g(x) 6= 0 (inclus dans lint-rieur dEgales) est vide, et donc Oppos = X , do le rsultat souhait. Donc montrerque si 6= alors = X est suffisant pour le rsultat souhait. Donc, on suppose vide. Soit x appartenant la frontire de . Par hypothse, il existe U ouvert contenant x sur lequel f et g sont gales ou
opposes, puisque f et g sont localement gales ou opposes. Lintersection de U et est non vide (puisque x est sur la frontire de ), et
contient un point sur lequel f et g sont non nulles, puisque f1(x) est dintrieur vide.Donc f et g sont gales sur U (rappelons que est inclus dans Egales). On en dduit que x appartient Egales.
26
-
On a donc montr que la frontire de est incluse dans . est donc ferm et ouvert. est donc gal X , puisque X est connexe. Do le rsultat.uunionsqNous avons encore besoin dun lemme de topologie :
Lemme 53 Soit (i)iI une famille douverts recouvrantRn, et pour i dans I ,fi applicationC de i dansR, telle que lintrieur de f1i (0) soit dintrieurvide.Supposons que lorsque i et j sintersectent, alors fi et fj soient gales ouopposes localement sur i j .Alors il existe une unique fonction f , au signe prs, dont la restriction pourtout i i soit fi.
Bien voir que lon na pas suppos que les i soient connexes.Dmonstration : On considre la famille (Bj)jJ des boules B telles quil existe un certain i tel
que B i. On dfinit f j la restriction de i Bj , lorsque Bj est inclus dans i. Supposons quon ait construit une fonction f localement gale ou oppos f j sur
Bj pour tout j dans J . Alors f , pour tout j dans J , est gale jf j sur Bj , avec j {1, 1}, par
connexit de Bj et application du lemme prcdent 52. Alors f , pour tout i dans I , est gale ifi sur i, avec i {1, 1}. En effet,
donnons-nous x et y dans i, avec fi(x) et fi(y) tous deux non nuls, et montronsque ncssairement f et fi gales (resp. opposes) en x implique f et fi gales (resp.opposes) en y.
- le segment [x, y] est recouvert par un nombre fini de boules Bj- chacune des intersections de ces boules est connexe, et chaque boule est connexe.- on peut donc appliquer sur chacun de ces connexes le lemme 52, do le rsultat. Il reste donc simplement construire une fonction f convenable sur les Bj . On montre tout dabord le rsultat en dimension 1, sur un segment ferm. Cela
se fait en recouvrant le segment en question par un nombre fini de boules ouvertes Bj ,en dfinissant f sur cette runion finie de proche en proche. Le fait que lon soit endimension 1 rend cela facile ; il suffit de choisir des ouverts conscutifs, non inclus lesuns dans les autres. Par le lemme 52, on a une solution et une seule, au signe prs. On procde maintenant par rcurrence sur la dimension i, pour montrer lexis-
tence et lunicit au signe prs dune telle fonction sur un pav [m,m]i. Pour cela on considre ce pav comme le produit [m,m] [m,m]i1. On dfinit une fonction ft pour t dans [m,m], dfinie sur [m,m]i1, en uti-
lisant lhypothse de rcurrence, ft gale FLEMMARD a marche pas parce quonnest pas sur que lintersection dun ensemble dintrieur vide avec un ensemble dedimension infrieure est dintersection vide.
1.5.5 Espaces vectoriels norms de dimension finie Proprits topologiquesLa boule unit ferme dun espace vectoriel norm est compacte si et seulement si
lespace est de dimension finie (thorme de Riesz ??).
27
-
Tout espace vectoriel norm de dimension finie est complet. Dans un espace vec-toriel norm de dimension finie, toutes les normes sont quivalentes (voir thorme??). En particulier, les espaces vectoriels norms rels de dimension finie sont tousisomorphes Rn pour un certain n, tous les espaces vectoriels norms complexes dedimension finie sont isomorphes Cn pour un certain n. Les compacts dun espacevectoriel de dimension finie sont donc exactement les ferms borns. Cela implique no-tamment que tout sous-espace vectoriel de dimension finie dun espace vectoriel normest ferm (quil sagisse dun espace vectoriel norm de dimension finie ou non).
Proprits gomtriquesDfinition 54 Une partie A dun espace vectoriel norm est dite quilibre sielle contient ax pour tout a de module 1 et tout x de A.
Thorme 55 Soit E un espace vectoriel norm de dimension finie. Alors, soitB E, B est la boule unit pour une certaine norme si et seulement si B estconvexe quilibr compact ayant 0 comme point intrieur. La norme corres-pondante est alors unique.
Dmonstration : Cette preuve, utilisant la notion de jauge, est dtaille dans [22,p236].uunionsq
Dfinition 56 On dfinit ici la notion de sparation au sens large (resp.strict) : On dit quun hyperplan H spare au sens large deux parties A etB (resp. spare au sens strict) si A et B sont inclus dans lun et lautre desdemi-espaces ferms (resp. ouverts) dlimits par H .
Thorme 57 (Forme gomtrique de Hahn-Banach en dim. finie) Soit Eun espace vectoriel norm de dimension finie. Alors : Soit A ouvert convexe non vide, L sous-espace vectoriel de E de dimensionfinie nintersectant pas A. Alors il existe un hyperplan H tel que L H etA H = . Soient A et B des convexes non vides et disjoints de E. Alors- Si A est ouvert, il existe un hyperplan sparant A et B au sens large.- Si A et B sont ouverts, il existe un hyperplan sparant A et B au sens strict.- Si A est compact et B ferm, il existe un hyperplan sparant A et B au sensstrict.- Si A et B sont ferms, alors il existe un hyperplan sparant A et B.
Dmonstration : Voir [19, p347] pour une preuve complte ; les points sont d-montrer dans cet ordre pour simplifier la preuve.uunionsq
28
-
Chapitre 2
Extrema
Une rfrence claire et complte est [7]. En outre on y trouve des algorithmes jus-tifis rigoureusement.
2.1 Cadre et dfinitionsPour ce chaptre, on travaillera sur une application f continue dun ouvert U dun
espace de Banach E dans R.
Dfinition 58 On dit que f admet un minimum relatif ou minimum local enx U si il existe un voisinage V de x tel que pour tout v dans V f(x) f(v).On dit que f admet un minimum relatif strict ou minimum local strict enx U si il existe un voisinage V de x tel que pour tout v 6= x dans Vf(x) < f(v).On dit que f admet un minimum global en x U si pour tout v dans Uf(x) f(v).On dit que f admet un minimum global strict en x U si pour tout v 6= xdans U f(x) < f(v).On dfinit de mme les notions de maximum relatif, maximum relatif strict,maximum global, maximum global strict, en remplaant les par des etles < par des >.
2.2 Rsultats lis la compacit
Proposition 59 Soit E un espace vectoriel norm de dimension finie et f C0de E dans R telle que
limxf(x) =Alors f est minore et atteint son minimum.
Dmonstration : On se donne A > 0 tel que x > A implique f(x) > f(0). Onconsidre alors K = B(0, A). K est ferm car on est en dimension finie (les compacts
29
-
dun espace vectoriel norm de dimension finie sont les ferms borns). f atteint doncsa borne inf (voir corollaire ??).uunionsq
Corollaire 60 (Quelques applications) La distance dun point un fermnon vide est minore et le minimum est atteint. Aussi les trois applications suivantes, empruntes [15] :- tant donne une application f C0 de [0, 1] dans R, il existe un polynme Pminimisant f P parmi les polynmes de degr n.- le thorme de DAlembert-Gauss, stipulant que tout polynme coeffi-cients complexes et de degr 1 admet une racine, en considrant z 7 |P (z)|(corollaire : tout polynme coefficients dans C est scind dans C[X]).
Voir le corollaire ?? sur la trigonalisation de matrices complexes, ou la partie?? sur les suites rcurrentes linaires.
2.3 Rsultats de calcul diffrentiel2.3.1 Rsultats au premier ordre
Thorme 61 (Condition ncssaire du premier ordre) Si x est un mini-mum relatif de f et si f est diffrentiable en x, alors la diffrentielle de fen x est nulle.
Dmonstration :df(x)(h) 0 car f(x+th)f(x)t 0 si t 0df(x)(h) 0 car f(x+th)f(x)t 0 si t 0uunionsq
Pas de rciproque ; par exemple x 7 x3 de R dans R a une diffrentielle nulleen 0 et na ni maximum ni minimum en zro.
Dfinition 62 Si df(x) = 0, on dit que x est un point critique.
Pour aller plus loin on peut sintresser aux extrma lis ; voir pour cela [7].
2.3.2 Rsultats du second ordre
Thorme 63 (Condition ncssaire du second ordre) Soit f deux fois dif-frentiable en x.Alors si f admet un minimum local en x, f (x) est positive.
Dmonstration :Supposons f (x) non positive ; alors il existe v tel que f (x)(v, v) soit < 0. On
se donne un voisinage V de x sur lequel f f(x) et sur lequel la formule de Taylor-Young ?? donne
30
-
f(x+ t.v) f(x) + 14f (x)(tv, tv)
(rappelons que par le rsultat prcdent f (x) est nul)on peut toujours choisir un tel voisinage V car
f(x+ t.v) = f(x) +12f (x)(tv, tv) + o(t2)
pour t assez petitet donc f(x+tv)f(x) est alors ngatif pour ces valeurs de t ( part pour t = 0).uunionsq
Thorme 64 (Condition suffisante du second ordre) Supposons E de di-mension finie. Soit f deux fois diffrentiables en x, f (x) = 0, et f (x) dfiniepositive. Alors f admet un minimum relatif strict en x.
Dmonstration : On considre simplement un minimum de f (x)(u, u) pour u =1 et la conclusion vient rapidement.uunionsq
On peut se passer dhypothse de dimension finie condition dimposerque f (x) vrifie > 0/f (x)(u, u) > u2.
2.4 La convexitPour une introduction la convexit, voir la partie 1.5.1.Les rsultats lis la convexit sont trs intuitifs, et se justifient rigoureusement
sans trop de difficult : on pourra consulter [7] pour moultes dveloppements.
Thorme 65 Un minimum local dune fonction convexe dfinie sur une partieconvexe est en fait un minimum global.Une fonction strictement convexe dfinie sur une partie convexe admet au plusun minimum et si un tel minimum existe il est strict.
2.5 Pour aller plus loinOn trouvera dans [7] des tudes des cas particuliers des formes quadratiques, et une
justification rigoureuse de la mthode de Newton.
31
-
Chapitre 3
Equations diffrentielles
Une rfrence apprciable pour sa clart et son souci dillustration et dutilisationpratique des rsultats (notamment informatique) est le livre "Analyse numrique etquations diffrentielles" de J.-P. Demailly ([9]). Je traite ici exclusivement le cas de ladimension finie, largement suffisant pour la plupart des problmes ; pour une analyseplus gnrale, on pourra consulter [3].
3.1 Lemmes prliminaires
Lemme 66 (Lemme de Gronwall) Soit une fonction C0 de lintervalle[a, b] dans R+. Soit c [a, b], soient A,B des rels positifs.Supposons que pour tout t dans [a, b], on ait
(t) A+B tc
(u).du
Alors pour tout t dans [a, b]
(t) A eB|tc|
Dmonstration :Pour t c, on dfinit F (t) = A + B t
C(s).ds. F est C1. Calculons la drive
de t 7 eBt.F (t) ; cette drive est
eBt(B F (t) +B(t))
donc est 0 sur [c, b]. Le rsultat en dcoule immdiatement pour t c.Pour le cas restant, t c, on dfinit F (t) = A+B c
t(u)du ; F estC1. Calculons
la drive de t 7 eBt.F (t) ; cette drive est
eBt(B F (t)B(t))
donc est 0 sur [a, c]. Le rsultat en dcoule immdiatement pour t c.uunionsq
32
-
3.2 Equations diffrentielles dordre 1
Dfinition 67 On appelle quation diffrentielle du premier ordre unequation de la forme
dx
dt= f(t, x)
avec E un R-espace vectoriel de dimension finie m, U une partie (non nces-sairement ouverte ! ) de R E, et f une application de U dans E, avec fcontinue.On appelle solution de cette quation une application drivable de I dansE avec I un connexe de R (i.e. un intervalle) telle que {(t, (t))/t I} Uet (t) = f(t, (t)) pour tout t dans I .
Proposition 68 Une solution dune quation diffrentielle est ncessairementC1.
Dmonstration : Lquation exprime notamment le fait que la drive de sa solu-tion est C0.uunionsq
Remarque (forme intgrale) : : I E est une solution de xt = f(t, x) dedonne initiale (c) = x0 si et seulement si pour tout t dans I , (t) = (c) + tcf(u, (u))du.
3.2.1 Avec des hypothses sympathiques sur f
Dfinition 69 Une fonction de deux variables (x, y) X Y 7 f(x, y) estdite localement lipschitzienne en y si pour tout (x, y) il existe un scalaire ket V un voisinage de (x, y) dans X Y tel que pour tous x, y1, y2 tel que(x, y1) V et (x, y2) V on ait
f(x, y1) f(x, y2) k.y1 y2
Lemme 70 (Unicit) Si f est localement lipschitzienne en x, alors si 1 et 2sont deux solutions sur un mme intervalle ayant mme valeur en un certain t,alors 1 = 2.
Dmonstration : Donnons nous 1 et 2 deux solutions, gales en t.Pour simplifier le raisonnement on va supposer quil existe t > t tel que 1(t) 6=
2(t). En cas contraire, on raisonnerait de mme en considrant t < t vrifiant cetteproprit.
Soit t linf de ces t. Par continuit, 2(t) = 1(t).Soit V lintersection de [t,[ et dun voisinage de t tel que {(t, 1(t))/t V }
et {(t, 2(t))/t V restent dans un voisinage de (t, (t)) sur lequel f est C-lipschitzienne en y.
33
-
Pour v dans V , on a i(v) = f(v, i(v)), et donc
1(v) 2(v) = t
0
f(u, 1(u)) f(u, 2(u))du
|1(v) 2(v)| C v
0
|1(u) 2(u)|du
Donc par le lemme de Gronwall on conclut que 1 et 2 sont gales sur V , ce quiest contradictoire avec la dfinition de t. uunionsq
Lemme 71 (Existence) On se donne une fonction f C0 de [t0 a, t0 + a] B(x0, b) B(0, c) dans Rn, la boule B(x0, b) tant une boule de Rn, et laboule B(0, c) tant une boule compacte ou un seul point dun espace m-trique.On suppose quil existe C tel que f(t, x1, ) f(t, x2, ) Cx1 x2,et on se donne M tel que |f(t, x)| est born par M sur [t0 a, t0 + a] B(x0, b) B(0, c) (un tel M existe ncessairement par continuit de f sur[t0 a, t0 + a]B(x0, b)B(0, c) qui est compact).Alors il existe une fonction (., ) telle que (t,)t = f(t, (t, ), ), dfiniesur [t0 T, t0 + T ] B(0, c), avec T le min de a et b/M , et telle que pourtout (t0, ) = x0 ; en outre cette fonction est continue par rappport t et.
Le paramtre t de la fonction f(t, x, ) peut tre vu comme le paramtretemporel ; cest une fonction de t que lon cherche comme solution. est la fonction so-lution, dpendant de t. Quant , cest un paramtre dsignant les conditions initiales.Le lemme est directement donn sous-une forme trs gnrale ; mais le cas dune bouleB(0, c) compacte rduite un point nest pas ngliger ; il sagit en fait du cas le pluscourant, lintrt dintroduire une boule tant simplement de montrer la continuit parrapport aux conditions initiales.
Lhypothse de lexistence de C sera notamment vrifie si les drivespartielles de f par rapport aux n composantes de existent et sont continues.
Dmonstration : On pose x0(t, ) = x0 On dfinit par rcurrence xk+1(t, ) = x0 +
tt0f(u, xk(u, ))du
Il est clair par rcurrence que |xk(t, ) x0| b xk est C0 en t clairement xk est C0 en par continuit sous le signe intgral (thorme ??) On montre maintenant par rcurrence que pour tout k
|xk+1(t, ) xk(t, )| MCk|t t0|k+1(k + 1)!
34
-
- Le cas k = 0 est immdiat- |(xk+1 xk)(t, )| = |
tt0f(u, xk(u, ), ) f(u, xk1(u, ), ).du| C|t
t0| tt0MCk1 |ut0|
k
k! du MCk|tt0|k+1(k+1)!
- t t0 tant born sur lensemble quon sest donn, la suite des xk convergeuniformment. Du coup la limite est continue par rapport (t, d). Le fait que la limitevrifie lquation est consquence du passage la limite.uunionsq
Thorme 72 (Cauchy-Lipschitz) Si f est localement lipschitzienne en x,tant donn (t0, x0), il existe une et une seule solution maximale (i.e. sur unintervalle maximal) de lquation diffrentielle.En outre, cette fonction maximale nadmet pas de limite au bord de lintervalleo elle est dfinie, si ce bord est fini et nest pas le bord de lintervalle dedfinition de f .
Dmonstration : Lexistence et lunicit dcoulent des lemmes ci-dessus. Lorsquela solution ne tend pas vers linfini au bord du domaine ( 6= et 6= du bord de linter-valle de dfinition de f ), on peut prolonger par le lemme dexistence.uunionsq
Thorme 73 (Existence de solutions globales) On suppose dsormais U dela forme I E, avec I intervalle ouvert de R. On suppose en outre quil existeune fonction k continue de I dans R+ telle que f(t, .) est k-lipschitzienne derapport de Lipschitz < k(t) sur E. Alors, toute solution maximale est unesolution globale (sur I).
Dmonstration : Donnons-nous un intervalle compact K inclus dans J . Il est suf-fisant de montrer quil existe une solution dfinie sur K. Il suffit donc dappliquer lelemme 71, k tant majore sur K par une certaine constante C.uunionsq
Thorme 74 (Equadif dpendante dun paramtre) On remplace f(t, x)par f(t, x, ) ; on suppose que f est continue lipschitzienne en x, de constantede Lipschitz indpendante de t et , avec appartenant un espace topolo-gique L, t dans un intervalle compact de R et x B(x0, r) E avec E unBanach. En outre, f est borne par M .Alors tant donn t0 R on peut associer une solution sur J =I [t0 r/M, t0 + r/M ], et (t, ) 7 (t) est continue.
Dmonstration : La dmonstration utilise le thorme du point fixe de Banach ;pour plus de prcisions, on consultera [9].uunionsq
35
-
3.2.2 Sans hypothse sympathique sur ff sera ici simplement suppose C0.
Dfinition 75 On dira que est une solution -approche de lquation dif-frentielle xt = f(t, x) si est dfinie continue C1 par morceaux sur unintervalle J , si (t0) = x0 et si pour tout t dans J (t, (t)) est bien dans U ,avec (t) f(t, (t)) , part aux points de discontinuit, auxquels ondoit avoir d(t) f(t, (t)) et g(t) f(t, (t)) tous deux , avec det g les drives droites et gauche.
Thorme 76 Supposons f C0, dfinie sur I B(x0, r), avec I intervalle deR, valeurs dans E. Supposons |f | M . Alors avec J = I [t0 r/M, t0 +r/M ], > 0, lquation xt = f(x, t) a une solution -approche affine parmorceaux telle que (t0) = x0.
Dmonstration : On montre quon peut construire une telle solution sur J+ = J [t0,[, le
rsultat sobtenant de mme sur J = J], t0].Dfinissons tout dabord 0 affine, dfinie par 0(t0) = x0, et 0(t0) = f(t0, x0). On note que 0 est bien telle que (t, (t)) soit dans le domaine de dfinition de
f pour t dans J+. Par continuit de f , 0 est une solution -approche sur [t0, t], pour t suffisam-
ment petit. En considrant t1 le sup de ces t, on obtient t1 1, et par continuit 0 estune solution -approche sur [t0, t1]. Si t1 est diffrent de sup J , alors on recommence le mme processus, en rempla-
ant x0 par x1 = f(t1), et t0 par t1, et r par r x1 x0 (> 0 par dfinition de J) ;on nomme 1 la nouvelle application obtenue. Puis t2, puis t3, et ainsi de suite, jusquce que ti soit le sup de J , auquel cas la preuve est termine. Supposons maintenant que la suite des ti crot sans jamais atteindre la borne sup
de J ; notons T le sup des ti. Remarquons que xn+1 xn M |tn+1 tn| et que donc
n+pm=n xn+1
xn M(T tn) ; donc par le critre de Cauchy (rappelons que E est un Banach), lasuite (xn) tend vers une certaine limite x. Considrons maintenant
f(tn, xn) f(t, n(t))pour T t tn, et examinons ce quil se passe pour n.Cette quantit est infrieure ou gale
f( tnT
, xnx
)f(T, x)+f(T, x)f( tT
, n(t) x car n(t) xn (t tn)M
)
1Je passe sous silence le cas t1 =, qui termine la preuve immdiatement.
36
-
et donc tend vers 0 en linfini, et donc finit par tre infrieure un certain rangn ; donc tn+1 T , do la contradiction.uunionsq
Corollaire 77 Supposons E de dimension finie. f tant toujours borne dansun voisinage de (t0, x0), on peut toujours trouver un voisinage de t0 sur lequellquation admet des solutions -approches pour tout .
On utilise le fait que dans le thorme prcdent, le voisinage obtenu estindpendant de .
3.3 Equation diffrentielle dordre nEtant donne une quation de la forme
dnx
dt= f(t, x,
dx
dt, ...,
dn1xdtn1
)
o f est suppose localement lipschitzienne en x, dxdt , ...,dn1xdtn1 , avec U R En, f
de U dans E continue valeurs dans Rm, on se ramne
dx
dt= x1
dx1dt
= x2
. . .
dxidt
= xi+1
dxn1dt
= f(t, x, x1, ..., xn1)
Ces quations diffrentielles correspondent donc une quation dordre 1 danslespace En.
Il reste reformuler les diffrents rsultats sur les quations diffrentielles dordre1 au cas de lordre n :
Etant donns t0 et x0, x1, ... , xn1, il existe (au moins) une solution maximalex dfinie sur un intervalle ouvert contenant t0 telle que x(t0) = x0, x(t0) = x1,... x(n1)(t0) = xn1 (rappelons que lon a suppos f continue). f tant localementlipschitzienne en x, dxdt , ...,
dn1xdtn1 , alors il y a unicit. Pour lexistence sans lunicit, le
thorme de Cauchy-Pano permet de se passer du caractre localement lipschitzien.Si U est de la forme I En, et sil existe une fonction continue dpendant seule-
ment de t majorant le coefficient de lipschitz, alors les solutions maximales sont dfi-nies sur I tout entier.
Ces rsultats dcoulent immdiatement des rsultats lordre 1, grce la transfor-mation dcrite ci-dessus.
37
-
3.4 Zoologie des quations diffrentielles3.4.1 Equation diffrentielle linaire du premier ordre
Dfinition 78 Une quation diffrentielle linaire du premier ordre est unequation diffrentielle du premier ordre avec
dx
dt= A(t).x+B(t)
avec A(t) une application linaire continue de E dans E et B(t) E, pourtout t dans I intervalle de R.E est toujours un R-espace vectoriel , A est continue, B est continue.Lquation diffrentielle homogne associe est
dx
dt= A(t).x
Thorme 79 (Thorme de Cauchy) Si A est continue de I dans L(E)a,alors lquation diffrentielle linaire du premier ordre admet une solution telle que (t0) = x0 dfinie sur tout I .Il existe une unique solution dfinie sur tout I .
aEnsemble des applications linaires continues de E dans E.
Dmonstration : Il sagit directement dune application du thorme 73. uunionsq
Thorme 80 En notant cette solution x0 ( t0 fix) la solutionde lquation linaire homogne associe, lapplication qui x0 associe x0est linaire bijective de E dans lensemble des solutions de lquation homo-gne.
Dmonstration : Linjectivit est claire, si deux fonctions sont diffrentes en t0 alors elles sont
diffrentes tout court. La surjectivit est non moins claire, par dfinition de x0 . La linarit, enfin est immdiate ; il suffit de voir que si x et y sont solutions, alors
.x+ .y est aussi solution.uunionsq
Corollaire 81 (Cas de la dimension finie) On en dduit au passage que la di-mension de lespace des solutions dune quation difrentielle est finie et gale la dimension de E, lorsque la dimension de E est finie.
38
-
Cas gnral, dimension non ncessairement finieDans cette partie, et seulement celle-ci, on traitera un cadre plus gnral. Lintrt
est seulement de donner un exemple dutilisation en dimension non finie. On admettrale fait que le thorme de Cauchy-Lipschitz est aussi valable dans le cas dun espacede Banach, mme sil nest pas de dimension finie (la dmonstration est dailleurs lamme).
A non constant
Dfinition 82 On appelle quation rsolvante de lquation diffrentielle li-naire de la dfinition 78 lquation paramtre dans lensemble des applica-tions C1 de I dans L(E) :
U (t) = A(t) U(t)
Afin de pouvoir travailler sur cette quation, nous aurons besoin du thorme deCauchy ; aussi devons nous bien voir :
- que L(E) est un Banach (de manire gnrale lensemble des applications li-naires continues dun espace vectoriel norm dans un Banach est un Banach)
- que lapplication t 7 ( 7 A(t)) est continue de I (pour la topologie usuelle)dans L(E)L(E) (pour la topologie produit)
Le deuxime point dcoule facilement de la continuit de A.On peut donc appliquer le thorme de Cauchy, et exhiber pour tout t0 dans I une
solution unique Resolvantt0 sur tout I de lquation rsolvante vrifiant
Resolvantt0(t0) = IdE .
Dfinition 83 La solution Resolvantt0(t0) est appele rsolvante doriginet0.
Voyons maintenant les proprits sympathiques de la rsolvante, qui dcoulent desrsultats ci-dessus.
Proposition 84 Pour tous a, b et c dans I ,Resolvanta(b).Resolvantb(c) =Resolvanta(c). Pour tout a et tout b Resolvanta(b) est dans GL(E).
Dmonstration : Il suffit de driver tout a, et dutiliser lunicit donne par le thorme de Cauchy. Cest une consquence vidente du fait que Resolvanta(b).Resolvantb(a) =
39
-
Resolvantb(a).Resolvanta(b) = Resolvanta(a) = Resolvantb(b) = IdE .uunionsq
Thorme 85 La solution x de lquation homogne associe vrifiantx(t0) = x0 est lapplication t 7 Resolvantt0(t).x0.Une solution particulire x de lquation gnrale de la dfinition 78 vrifiantx(t0) = x0 est donne par
x(t) = Resolvantt0(x0) + tt0
Resolvantu(t)B(u)du
Dmonstration : La rsolvante est construite pour a. Il suffit dcrire la drive de
t 7 Resolvantt0(t).y0pour avoir la rsultat souhait. Il suffit dcrire que x peut sexprimer sous la forme x(t) = Resolvantt0(t)(C(t)) ;
ensuite, par une mthode bien similaire la mthode de variation des constantes, oncrit
x(t) =(((x, y) 7 Resolvantt0(x)(y)) (t 7 (t, C(t))))
t
= ( ((Resolvantt0(x)
x)(y)dx+ (Resolvantt0(x)dy)) (t, C(t))).(1, C (t))
= A(t)Resolvantt0(t)C(t) +Resolvantt0(t)C(t)
Donc x sera solution si B(t) = Resolvantt0(t)C (t), cest dire si C(t) =Resolvant1t0,t(x0)+
tt0Resolvant1t0 (u)B(u)du, donc si x(t) = Resolvantt0(x0)+
Resolvantt0(t). tt0Resolvantu(t0)B(u)du.
Donc on a bien
x(t) = Resolvantt0(t)x0 + tt0
Resolvantu(t)B(u)du
Do le rsultat. uunionsq
A constantThorme 86 SiA(t) = A est constant, alors lquation diffrentielle linairedfinie en 78 admet pour unique solution x vrifiant x(t0) = x0 lapplication
x : t 7 exp((t t0)A)(x0)
Pour se rappeler de ce quest lexponentielle dun endormophisme continudun Banach on pourra consulter ??.
40
-
Dmonstration : Le thorme de Cauchy nous donne lunicit, et il est immdiatque cette fonction convient, par le thorme donnant la drive de lapplication t 7exp(t f) (voir partie ??).uunionsq
On note que t 7 exp((t t0)A)(x0) est le rsolvant de lquation diffrentielle.
Thorme 87 Une solution particulire x de lquation diffrentielle gnraledfinie en 78 dans le cas o A(t) = A est constant et vrifiant x(t0) = x0 estdonne par
x(t) = exp((t t0)A).x0 + tt0
exp((t u)A)B(u)du
Dmonstration : On peut simplement argumenter en utilisant le fait signal ci-dessus, ie que t 7 exp((t t0)A) est le rsolvant (dorigine t0) de lquation diff-rentielle, mais on peut aussi faire le calcul directement en cherchant des solutions de laforme t 7 exp(tA)C(t).uunionsq
Remarque : tout comme lorsque A est constant on a Resolvantt0(t) = exp((t t0)A), on a Resolvantt0(t) = exp(
tt0A(u)du LORSQUE pour tous t et s dans I
A(t) et A(s) commutent (A(t)A(s) = A(s)A(t)).
Cas de la dimension finie A(t) non constant
Si E est de dimension finie n, alors lespace des solutions de lquation homogneassocie est de dimension finie n, comme on le souligne dans le corollaire 81. Poursimplifier les notations, on identifie E et Rn, sans perte de gnralit.
Proposition 88 On se donne une famille x1, ..., xm de solutions de lquationdiffrentielle homogne. Alors ces solutions sont libres si et seulement si len-semble des xi(t) est libre pour un certain t, si et seulement si lensemble desxi(t) est libre pour tout t.
Dmonstration :Il est clair que si les xi(t) forment une famille libre pour un certain t, alors les xi
forment une famille libre.Il est clair que si pour tout t, les xi(t) forment une famille libre, il en est de mme.Il reste donc juste voir que si les xi forment une famille libre, alors les xi(t)
forment une famille libre, quel que soit t. Cela dcoule simplement du thorme 80.uunionsqIl nest par contre pas vrai que dans le cas gnral, (xi) famille libre (xi(t))
famille libre (par exemple nimporte quelle famille libre de fonctions de R dans R).Ainsi lorsque lon aura obtenu une famille libre de n solutions de lquation diff-
rentielle homogne et une solution de lquation gnrale, alors on pourra en dduiretoutes les solutions de lquation diffrentielle, en considrant la somme de la solution
41
-
de lquation gnrale plus une combinaison linaire quelconque des n solutions libresde lquation homogne associe.
Gnralement, le problme ne sera pas dobtenir les solutions de lquation homo-gne, mais plutt dobtenir les solutions de lquation gnrale.
Pour cela on utilisera notamment la mthode de la variation des constantes.On suppose que x1, ..., xn sont des solutions libres de lquation homogne asso-
cie.On cherche alors x solution particulire de lquation gnrale, avec x de la forme
x(t) = 1(t)x1(t) + 2(t)x2(t) + + n(t)xn(t)On note bien que toute fonction peut sexprimer de la sorte, puisque pour tout t la
famille des xi(t) est libre.Faisons maintenant varier les constantes :
dx
dt(t) = 1
dx1dt
+ + n dxndt
= 1Ax1 + 2Ax2 + ...+ nAxn par dfinition des xi.
+1t
(t)x1(t) + . . .nt
(t)xn(t)
Donc x vrifie lquation gnrale si et seulement sii
i(t)xi(t) = B(t)
En crivant = (1, ..., n) et M(t) =
(x1)1 (x1)2 . . . (x1)n(x2)1 (x2)2 . . . (x2)n
.
.
.
.
.
.
.
.
.
.
.
.
(xn)1 (xn)2 . . . (xn)n
2On obtient lquation = M(t)1B(t) (notez que M(t) est inversible, de par la
proposition 88).On peut donc en dduire les , une constante prs. Les constantes en question ne
changent de toute faon rien, puisque cela revient ajouter une combinaison linairedes solutions de lquation homogne.
Cas A(t) = A constantTout dabord on peut donner la forme gnrale des solutions, de manire simple
lorsque lendomorphisme est diagonalisable en dimension finie.2On vrifiera facilement quil sagit du rsolvant (voir partie 82).
42
-
Thorme 89 On va supposer ici que A(t) = A est constant, et quil sagitdun endomorphisme diagonalisable, en dimension finie n. Alors avec (ei) unebase de E dans laquelle A sidentifie une matrice diagonale, avec A(ei) =i.ei, les solutions de lquation homogne associe lquation diffrentiellelinaire dfinie en 78 sont les combinaisons linaires de fonctions de la forme
fi : t 7 exp(i.t)eipour i [1, n]
Dmonstration : Il est facile de voir que ces fonctions sont bien dans lensembledes solutions de lquation diffrentielle homogne associe. En vertu du corollairediff81 il suffit donc de vrifier que les solutions en question forment bien une famillelibre ; ce fait se dduit immdiatement du fait que la famille des fi(0) est libre.
3.4.2 Equations diffrentielles autonomes
Dfinition 90 Une quation diffrentielle est dite autonome si f ne dpendpas de t.On appelle point dquilibre dune quation diffrentielle autonome un pointx0 tel que f(x0) = 0.On appelle point stable dune quation diffrentielle autonome un pointdquilibre x0 tel que > 0 tel que pour tout x solution de lquation diffrentielle et tout t0 telque x(t0) x0 x est dfinie sur [t0,[ x(t) x0 pour tout t t0On appelle point asymptotiquement stable dune quation diffrentielle au-tonome un point dquilibre x0 tel que pour un certain , pour tout x solutionde lquation diffrentielle et tout t0 tel que x(t0) x0 , x est dfinie sur [t0,[ limtx(t) = x0
Cest dire quune quation diffrentielle autonome est de la forme xt = f(x).Les rsultats dunicit permettent de dire que si
dx
dt= f(x) et x(u) = x0
etdy
dt= f(y) et y(v) = x0
avec I intervalle maximal de dfinition de x et J intervalle maximal de dfinitionde y, alors J + u = I + v et y(t+ v) = x(t+ u) pour tout t tel que t+ v J .
Quelques exemples : Equation x = x : 0 est lunique point dquilibre ; il nest ni stable ni asympto-
tiquement stable.
43
-
Equation x = x : 0 est lunique point dquilibre ; il est stable et asymptoti-quement stable. Equation x = M.x avec M antisymtrique : 0 est point dquilibre ; il est stable,
mais pas asymptotiquement stable. Equation x = u, avec u vecteur non nul : pas de point dquilibre.
3.4.3 Equation de la chaleur Le problmeDfinition 91 On dfinit =]0, 1[R+ ; dsigne ladhrence de dansR2, cest dire [0, 1] R+.On cherche u continue de dans R, telle que u| soit C et vrifie
u
t
2u
x2= 0
(quation de la chaleur)avec les conditions aux limites (CLs) :
u(0, t) = u(1, t) = 0
et les conditions initiales (CIs) :
u(x, 0) = h(x)
avec h une certaine fonction continue de [0, 1] dans R, C1 sur ]0, 1[, telle queh(0) = h(1) = 0 (indispensable pour que les CLs puissent tre vrifies).
La mthodePour attaquer cette quation, comme dautres quations vrifiant une quation de
la mme forme (drive premire en fonction du temps gale une drive seconde(un laplacien) en coordonnes despace), on cherche en fait une solution u(x, t) =f(x)g(t) sexprimant comme produit dun terme despace par un terme de temps. Onne se proccupera pas pour le moment de la CI.
Une fois des solutions trouves, on remarquera que les solutions forment un es-pace vectoriel. On cherchera alors une solution combinaison linaire vrifiant la CI.Pour cela, puisquon aura remarqu que nos solutions en x sont des sinusodes (ayanttoutes pour frquence un multiple dune certaine frquence fondamentale) on consid-rera lantisymtrise de la fonction des CI, pour considrer un dveloppement en sriede Fourier qui ne comporte que des sinusodes (il ny aura pas de cosinusodes puisquelon considrera une fonction impaire !).
On obtiendra ainsi une solution. Il existe une preuve dunicit, qui ne sera pasexpose ici : on la trouvera par exemple dans [22, p103].
44
-
Les calculsEcrivons
u(x, t) = f(x)g(t)
Alors lquation de la chaleur scrit
f(x)g(t) = f (x)g(t)
g(t)gt
=f (x)f(x)
=
Ce terme est indpendant de x ( cause du terme de gauche) et de t ( cause du termede droite). est donc une constante.
Le cas > 0 et le cas = 0 nous amnent, via les CLs, au cas u = 0, peuintressant. Il reste donc seulement le cas < 0.
On a une quation de degr 2, quon peut rcrire comme une quation de degr 1,
f (x) = f(x) quivaut (f1f2
)=(
0 1 0
)(f1f2
)Cette quation est linaire, et admet donc des solutions sur tout ]0, 1[ ; il sagit dune
quation homogne (pas de second membre) elle est dans un espace de dimension 2,donc lespace des solutions est de dimension 2.
On a deux solutions videntes : x 7 cos(x) et x 7 sin(x) (avec 2 = ). Lasolution cosinusode ne satisfait pas les CLs, donc on garde les sinusodes. On dduitdes CLs que doit tre de la forme n = n pour n N.
Pour g, lespace des solutions est de dimension 1, il sagit dune exponentielledcroissante, x 7 Ce2t (on applique lquation de la chaleur pour trouver le 2, oon remarque et on utilise lquation g
g = de la page prcdente).On a donc des solutions en u : (x, t) 7 e2ntsin(nx). On note que les solutions
sont un espace vectoriel. On a donc pour solution de lquation de la chaleur et desCLs au moins (on na pas prouv que ctaient l les seules solutions) les combinaisonslinaires de solutions de cette forme. On va en fait considrer aussi les combinaisonslinaires infinies
n0 ane
2ntsin(nx), pourvu que la sriean soit absolument
convergente ; ainsi les thormes de drivation sous le signe intgrale sappliquent etla combinaison linaire obtenue est bien une solution de lquation.
On se proccupe maintenant des CIs, en cherchant une solution combinaison li-naire des solutions trouves ci-dessus.
On voudrait donc h(x) =n0 an sin(nx). On va donc dcomposer h en srie
de Fourier. Pour cela on va choisir h impaire, pour navoir que des sinusodes.Donc on dfinit h sur [1, 0] par h(x) = h(x). Ensuite on prolonge h par 2
priodicit. On a alors h(x) =n0 an sin(nx), avec convergence normale de la
somme des an puisque h est C1 (pas de problme en 0 ou en 1 car h(0) = h(1) = 0).Lunicit de la solution ainsi obtenue ne sera pas dtaille ici ; voir [22, p103].
45
-
3.4.4 Equations variables spares
Dfinition 92 On appelle quation variables spare une quation diff-rentielle que lon peut rcrire sous la forme
x = f(t)g(x)
Si g sannule en une valeur particulire xp, alors la fonction constante x = xp estclairement solution particulire. Lquation peut se rcrire dxg(x) = f(t)dt, et donc on obtient en intgrant chaque
membre une expression de
1/g en fonction def . Il est clair que
1/g est continue
strictement monotone sur les intervalles sur lesquels g(x) ne sannule pas, et que doncon en dduit x en fonction de t en considrant linverse de
1/g. Par les rsultats
dunicit si la condition initiale (t0, x0) est telle que g(x0) 6= 0 alors par le lemme 70(si les fonctions en jeu vrifient bien les conditions nonces !) on a t, g(x(t)) 6= 0si x est une solution maximale (en effet en cas contraire x serait la fonction constantegale xp avec g(xp) = 0), et donc on obtient bien ainsi des solutions maximales.
On trouvera dans [9] un exemple bien dtaill.
3.4.5 Equation de Bernoulli
Dfinition 93 On appelle quation de Bernoulli une quation de la formex = p(t)x+ q(t)x
avec R \ {1} et p et q continues.
On se place sur les intervalles o x ne sannule pas. On peut alors diviser par x,et poser z = x1, on obtient alors
dz
dt= (1 )(p(t)z + q(t))
quation linaire en z, que lon sait donc rsoudre.
3.4.6 Equation de Ricatti (polynme coefficients dpendant de tde degr 2 en x)
Dfinition 94 On appelle quation de Riccati une quation de la formex = a(t)x2 + b(t)x+ c(t)
avec a, b et c trois fonctions continues.
Nayant pas de solution magique, on choisit de supposer que lon est capable dex-hiber une solution particulire xp.
46
-
On pose alors z = x xp, et on obtient miraculeusement
z(t) = [2a(t)xp(t) + b(t)] z(t) + a(t)z2(t)
On se ramne donc un cas particulier dquation de Bernoulli, que lon rsoudcomme expliqu en 3.4.5.
3.4.7 Equations homognes
Dfinition 95 On appelle quation homogne une quation de la forme x =f(x/t), avec f C0 dun intervalle de R dans R.
Une telle quation se rsoud classiquement en posant y = x/t ; on se ramne alors lquation variables spares y = (f(y) y)/t, qui se rsoud elle-mme par lamthode expose en partie 3.4.4. On a des solutions constantes de la forme z = a, soity = ax, pour a vrifiant f(a) = a.
On montre facilement que limage dune solution par une homothtie est encoreune solution (seul comptant le rapport x/t).
3.4.8 Equation de Lagrange
Dfinition 96 Lquation de Lagrange est x(t) = a(x(t))t+ b(x(t)), avec aet b des fonctions C1.
On la rsoud de la manire suivante : chercher les solutions x constant sur un intervalle ; ce sont les x = c, avec
a(c) = c. Les solutions sont alors les x = ct+ b(c). poser y = x, t = g(x), pour chercher dautres solutions. On obtient
dt
dy=a(y)t+ b(y)y a(y)
qui est une quation diffrentielle linaire en t.
47
-
Chapitre 4
Formes diffrentielles
Ce chaptre a seulement pour but de fournir un cadre utile dans la vie de tous lesjours, pour matriser les outils utiles pour sattaquer de nombreux thormes. Lintrtntant pas dpuiser les richesses des formes diffrentielles, de nombreuses dfinitionset de nombreux thormes seront donns sans justification, notamment dans les fonde-ments des formes diffrentielles, au niveau des proprits dalgbre multilinaire.
4.1 Gnralits, rappels sur les applications multilinaires4.1.1 Dfinition dune forme diffrentielle
Tout de go, dfinissons tout dabord ce quest une application diffrentielle :
Dfinition 97 Soit U un ouvert de E un R-espace de Banach, soit F un R-espace de Banach.On appelle forme diffrentielle de degr p sur U valeurs dans F une ap-plication de U dans Ap(E;F ) a.La forme diffrentielle est dite de classe Cn si lapplication est Cn (pour n N {}).On note (n)p (U,F ) lensemble des p formes diffrentielles de U dans F declasse Cn.
aEspace des applications p-linaires alternes continues de E dans F . Cet espace est un Ba-nach, car cest un sous-espace vectoriel ferm de Lp(E,F ) (qui est un Banach comme chacunsait).
Exemples :- Une application Cn de E dans F est une 0-forme diffrentielle de E dans F , de
classe Cn.- Si n > 0, sa diffrentielle est une forme 1-diffrentielle de classe Cn1.Nous allons dfinir plus loin de nombreuses oprations sur cet outil, mais tout
dabord nous devons rappeler certaines proprits des applications multilinaires.
48
-
4.1.2 Proprits des applications multilinaires
Dfinition 98 Etant donne une application bilinaire de F G dansH , ondfinit une multiplication dapplications p-linaires alternes par :
Ap(E,F )Aq(E,G) Ap+q(E,H)
(f, g) 7 f gdfinie par
(f g)(x1, . . . , xp+q) =
()(f(x(1), x(2), . . . , x(p)), g(x(p+1), x(p+2), . . . , x(p+q)))
La sommation tant tendue lensemble des permutations de [1, n] tellesque (1) < (2) < < (p) et (p+ 1) < (p+ 2) < < (p+ q).
Il conviendrait de montrer que f g est bien p + q linaire, continue etalterne.
souvent on sabstiendra de noter ; on se contentera de . sera sou-vent implicitement lapplication la plus intuitive ; par exemple si H et G sont gaux etsi F est R, on utilisera le produit dun lment dun Banach par un rel.
Proposition 99 (Proprit du produit dapplications multilinaires) est bilinaire.
Proposition 100 (Proprits du produit de formes multilinaires) Si fappartient Ap(E,R) et g appartient Aq(E,R), alors f g = (1)pqgf Si f ppartient Ap(E,R), g appartient Aq(E,R) et h appartient Ar(E,R), alors (f g) h = f (g h). Si les fi sont des formes linaires continues sur E (dans R), pour i [1, n],alors
f1 fn(x1, . . . , xn) =n
()fi(x(i)) = det (fi(xj))i,j
49
-
Proposition 101 (Proprits des application p-linaires avec dimE = n)E est ici suppos isomorphe Rn.Toute application p-linaire de E dans F scrit de manire unique
x 7
1i1
-
Bibliographie
[1] P. BARBE, M. LEDOUX, Probabilit, BELIN, 1998.[2] H. BRZIS, Analyse fonctionnelle, MASSON, 1983.[3] H. CARTAN, Calcul diffrentiel, FLEMMARD.[4] A. CHAMBERT-LOIR, S. FERMIGIER, V. MAILLOT, Exercices de mathma-
tiques pour lagrgation, Analyse 1, MASSON, 1997.[5] A. CHAMBERT-LOIR, S. FERMIGIER, Exercices de mathmatiques pour lagr-
gation, Analyse 2, MASSON, 1995.[6] A. CHAMBERT-LOIR, S. FERMIGIER, Exercices de mathmatiques pour lagr-
gation, Analyse 3, MASSON, 1996.[7] P.G. CIARLET, Introduction lanalyse numrique matricielle et loptimisa-
tion, DUNOD, 1998.[8] F. COMBES Algbre et gomtrie, BRAL, 1998.