Corr 8327
6
Dimensionnements Exercice 8.3.27 1 2004-04-03 Exercice 8.3.27 On connaît la fonction de transfert linéarisée du système à régler. G s s s s s s s () , , , = + + + + + 1510 5 10 1620 6 82 10 6 3 10 10 8 9 4 3 5 2 7 9 A Déterminer les paramètres d’un régulateur pour laquelle le système en boucle fermée aura une réponse indicielle bien amortie (D 1 < 5 %), un temps de réponse inférieur à 5 [ms] et un écart statique nul. Calcul manuel. B Appliquer la méthode de Bode (rapport de pulsation) assistée par RegHarmo. C Appliquer la méthode de Nyquist (marge de phase) assistée par RegHarmo. D Appliquer la méthode de Black (facteur de résonnance) assistée par RegHarmo. Corrigé 8.3.27 On ne voit pas clairement quelles sont les constantes de temps à compenser. On utilise alors la fonction développée à cet effet au Laboratoire d'Automatique de l'eig. » [K,Tnum,Tden]=tf2bd([1.5e8,5e9],[1,1620,6.82e5,6.3e7,1e9]) K = 5 Tnum = 3.0000e-002 Tden = 5.0000e-002; 1.0000e-002; 2.0000e-003; 1.0000e-003 On peut admettre une compensation de la 1 ère constante de temps du dénominateur par celle du numérateur. Cela donne un nouveau gain de 3 (aux pulsations élevées). On compense la 2 e et la 3 e constante de temps par celles du régulateur. On ajoute une petite constante de temps (10 fois plus petite que la plus petite du système) pour rendre le régulateur causal. T n = 0,01 T v = 0,002 [s] On dimensionne la constante d'intégration par le critère optimal: T i = 2*3*0,001 = 0,006 [s] G s s s s s s s s s R () ( , )( , ) , ( , ) , , = + + + = + + + 1 001 1 0 002 0 006 1 0 0001 33 3 2 10 1 667 10 10 2 4 6 2 4 B On utilise le logiciel: on accepte la première suggestion de compensation: –1/0,01, pour la seconde proposition:-1/0.01, on lui préfère –1/0.002. On obtient alors le diagramme. 10 2 10 3 -250 -200 -150 -100 -50 Phase [degrés] ( 951.0734 , -135.0033 ) 10 2 10 3 10 -2 10 0 ( 421.5398 , 0.048879 ) Amplitude Diagramme de Bode ( 474.1751 , 0.027979 )
-
Upload
stephane-durel-mbida -
Category
Documents
-
view
3 -
download
0
description
regulation batch
Transcript of Corr 8327

Dimensionnements
Exercice 8.3.27 1 2004-04-03
Exercice 8.3.27 On connaît la fonction de transfert linéarisée du système à régler.
G ss
s s s ss ( ),
, ,=
+
+ + + +
1510 5101620 6 82 10 6 310 10
8 9
4 3 5 2 7 9
A Déterminer les paramètres d’un régulateur pour laquelle le système en boucle fermée aura une réponse indicielle bien amortie (D1< 5 %), un temps de réponse inférieur à 5 [ms] et un écart statique nul. Calcul manuel. B Appliquer la méthode de Bode (rapport de pulsation) assistée par RegHarmo. C Appliquer la méthode de Nyquist (marge de phase) assistée par RegHarmo. D Appliquer la méthode de Black (facteur de résonnance) assistée par RegHarmo. Corrigé 8.3.27 On ne voit pas clairement quelles sont les constantes de temps à compenser. On utilise alors la fonction développée à cet effet au Laboratoire d'Automatique de l'eig. » [K,Tnum,Tden]=tf2bd([1.5e8,5e9],[1,1620,6.82e5,6.3e7,1e9]) K = 5 Tnum = 3.0000e-002 Tden = 5.0000e-002; 1.0000e-002; 2.0000e-003; 1.0000e-003 On peut admettre une compensation de la 1ère constante de temps du dénominateur par celle du numérateur. Cela donne un nouveau gain de 3 (aux pulsations élevées). On compense la 2e et la 3e constante de temps par celles du régulateur. On ajoute une petite constante de temps (10 fois plus petite que la plus petite du système) pour rendre le régulateur causal.
Tn = 0,01 Tv = 0,002 [s] On dimensionne la constante d'intégration par le critère optimal: Ti = 2*3*0,001 = 0,006 [s]
G ss s
s ss s
s sR ( )
( , )( , ), ( , )
, ,=
+ ++
=+ +
+
1 0 01 1 0 0020 006 1 0 0001
33 3 2 10 1 667 10
10
2 4 6
2 4
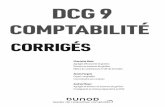
B On utilise le logiciel: on accepte la première suggestion de compensation: –1/0,01, pour la seconde proposition:-1/0.01, on lui préfère –1/0.002. On obtient alors le diagramme.
102
103
-250
-200
-150
-100
-50
( 950 7942 -132 1082 )
Phase [degrés]
( 951.0734 , -135.0033 )
102
103
10-2
100
( 421.5398 , 0.048879 )
Amplitude
Diagramme de Bode
( 474.1751 , 0.027979 )

Dimensionnements
Exercice 8.3.27 2 2004-04-03
On choisit le gain de 1/0.028, ce qui correspond à un rapporte de 2 entre ωc et ω1. Régulateur:
35.46 s^2 + 1.844e004 s + 3.546e005 ----------------------------------- s^2 + 1e004 s
0 0.02 0.04 0.06 0.08 0.1 0.120
0.2
0.4
0.6
0.8
1
1.2
1.4
Tr
Réponse à un saut de consigne
L'allure non attendue s'explique par une paire zéro–pôle non superposée: –33,3 et –29,9. On la compense par un filtre de consigne, mais le zéro est choisi légèrement à gauche du pôle. Filtre:
1.075 s + 33.33 --------------- s + 33.33
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.080
0.2
0.4
0.6
0.8
1
1.2
1.4
D1
Tr
Réponse à un saut de consigne
Le cahier des charges est respecté!

Dimensionnements
Exercice 8.3.27 3 2004-04-03
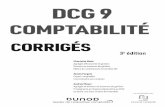
C On commence par faire le choix des zéros identique à celui de A. On trace ensuite la réponse harmonique. Pour une phase de –116.5° (marge de phase de 63,5° pour un dépas-sement de 4,3 %), on relève le module et on corrige le gain du régulateur (KR=1/0.0338) pour que ce module soit de 1.
-1 -0.8 -0.6 -0.4 -0.2 0
-1
-0.8
-0.6
-0.4
-0.2
0
Diagramme de Nyquist
axe ré el
axe
imag
inai
re
( 0.033
Régulateur:
29.59 s^2 + 1.775e004 s + 1.479e006 ----------------------------------- s^2 + 1e004 s
0 0.01 0.02 0.03 0.04 0.05
0
0.2
0.4
0.6
0.8
1
1.2
1.4
D1 Tr
Réponse à un saut de consigne
On n'est pas loin de l'objectif, mais le dépassement est encore trop grand. L'allure
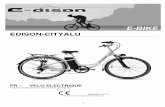
laisse à penser qu'il existe un zéro non négligeable qui provoque ce dépassement suivi d'une lente convergence vers 1. on étudie le lieu des pôles en boucle fermée.

Dimensionnements
Exercice 8.3.27 4 2004-04-03
-800 -700 -600 -500 -400 -300 -200 -100 0 100-500
-400
-300
-200
-100
0
100
200
300
400
500
Lieu de pôles
-40 -38 -36 -34 -32 -30 -28 -26 -24 -22
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Lieu de pôles
La paire zéro–pôle voisine de l'origine est mal superposée. On décide d'ajouter un
filtre de consigne qui corrige cette paire. Filtre:
0.969 s + 33.33 ---------------
s + 33.33
0 0.01 0.02 0.03 0.04 0.050
0.2
0.4
0.6
0.8
1
1.2
1.4Réponse à un saut de consigne
D1
Tr
Dépassement maximal: D1= 3.994 [%]; temps de réponse: Tr= 0.0046663[s] Le cahier des charges est cette fois atteint.

Dimensionnements
Exercice 8.3.27 5 2004-04-03
D On choisit les zéros comme en A et C. On s'arrange de travailler sur le gain pour faire tangenter la réponse harmonique à la courbe de Qr = 0 [dB] sur l'abaque, ce qui correspond à un dépassement de 4,3 %.
-350 -300 -250 -200 -150 -100 -50-80
-60
-40
-20
0
20
40Diagramme de Black-Nichols
( -114.7038 , 1.6097 )
Ope
n-Lo
op G
ain
(dB
) 6 dB3 dB1.3 dB
0.5 dB0.25 dB
0 dB
-1 dB
-3 dB-6 dB
-12 dB
-20 dB
-40 dB
-60 dB
-80 dB
1.08e-005 dB
-60 dB
-80 dB
6 dB3 dB1.3 dB
0.5 dB0.25 dB
0 dB
-1 dB
-3 dB-6 dB
-12 dB
-20 dB
-40 dB
-60 dB
-80 dB
Régulateur:
25.12 s^2 + 1.507e004 s + 1.256e006 ----------------------------------- s^2 + 1e004 s
0 0.01 0.02 0.03 0.04 0.050
0.2
0.4
0.6
0.8
1
1.2
1.4
D1 Tr
Réponse à un saut de consigne
Dépassement et temps de réponse ne sont pas respectés, mais l'allure de la réponse indicielle est presque bonne! Comme dans les cas précédents, on ajoute un filtre de consigne. Filtre:
0.9627 s + 33.33 ---------------- s + 33.33
On vérifie la réponse indicielle.

Dimensionnements
Exercice 8.3.27 6 2004-04-03
0 0.002 0.004 0.006 0.008 0.01 0.0120
0.2
0.4
0.6
0.8
1
1.2
1.4
D1
Tr
Réponse à un saut de consigne
On y est presque!. On retouche très légèrement le gain du régulateur (+20 %): Régulateur:
30 s^2 + 1.8e004 s + 1.5e006 ---------------------------- s^2 + 1e004 s
0 0.002 0.004 0.006 0.008 0.01 0.0120
0.2
0.4
0.6
0.8
1
1.2
1.4
D1
Tr
Réponse à un saut de consigne
Cette fois c'est bon! Conclusion Chacune des méthodes nous conduit tout près de l'objectif dès le premier dimensionnement du régulateur. Pour un système comme celui qu'on a étudié ici, qui admet un zéro dans sa fonction de transfert, il faut quelque peu retoucher le régulateur, par adjonction d'un filtre de consigne. Même pour des systèmes plus simples, il ne faut pas oublier que la fonction de transfert n'est qu'un modèle mathématique linéarisé et simplifié du processus physique réel. La compensation des pôles du système par des zéros peut donc être approximative, on a vu ici qu'une compensation pôle–zéro approximative peut avoir une incidence non négligeable si cette paire est relativement proche de l'axe imaginaire.