
modélisation en centrifugeuse de problèmes d'interaction ...
Figure : Quadricoptère équipé d’un système d’asservissement lui permettant une meilleure stabilité
LYCEE CHAPTAL
TD 2
PTSI
Séquence 2
CPGE PTSI/PT*
Demie Classe
A3 - Conduire l'analyse B2 - Proposer un modèle B3 - Valider un modèle D1 - Découvrir le fonctionnement d’un système com-plexe D2 - Justifier et/ou proposer un protocole expérimental D3 - Mettre en œuvre un protocole expérimental et vé-rifier sa validé G1 - Élaborer, rechercher et traiter des informations G2 - Mettre en œuvre une communication
4h
Comportement et Modélisation des systèmes linéaires continus invariants
Sciences Industrielles
pour l’Ingénieur
2
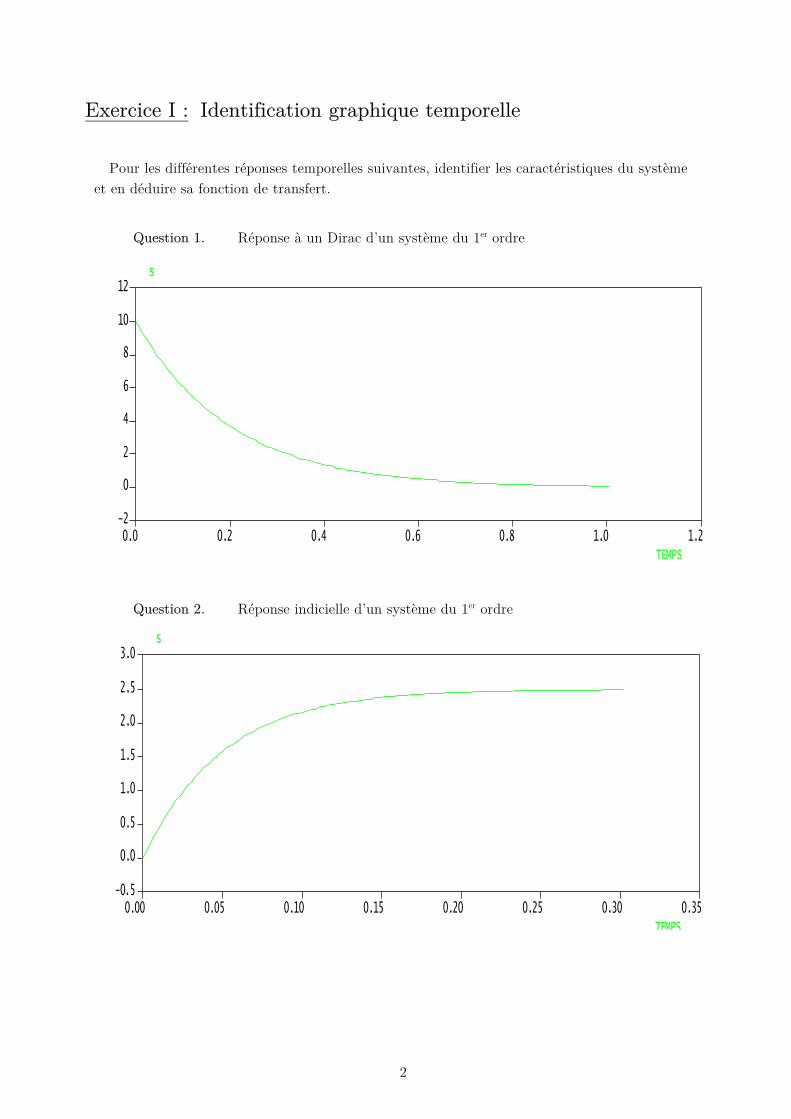
Exercice I : Identification graphique temporelle
Pour les différentes réponses temporelles suivantes, identifier les caractéristiques du système
et en déduire sa fonction de transfert.
Question 1. Réponse à un Dirac d’un système du 1er ordre
Question 2. Réponse indicielle d’un système du 1er ordre
05/10/1117:57:59
AABW.TMPAABV.TMPDID'ACSYDE REPONSE TEMPORELLE
0.0 0.2 0.4 0.6 0.8 1.0 1.2-20
0
20
40
60
80
100
120
140
TEMPS
e
0.0 0.2 0.4 0.6 0.8 1.0 1.2-2
0
2
4
6
8
10
12
TEMPS
s05/10/1117:51:46
AABR.TMPAABQ.TMPDID'ACSYDE REPONSE TEMPORELLE
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.350.94
0.96
0.98
1.00
1.02
1.04
1.06
TEMPS
e
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35-0.5
0.0
0.5
1.0
1.5
2.0
2.5
3.0
TEMPS
s
3
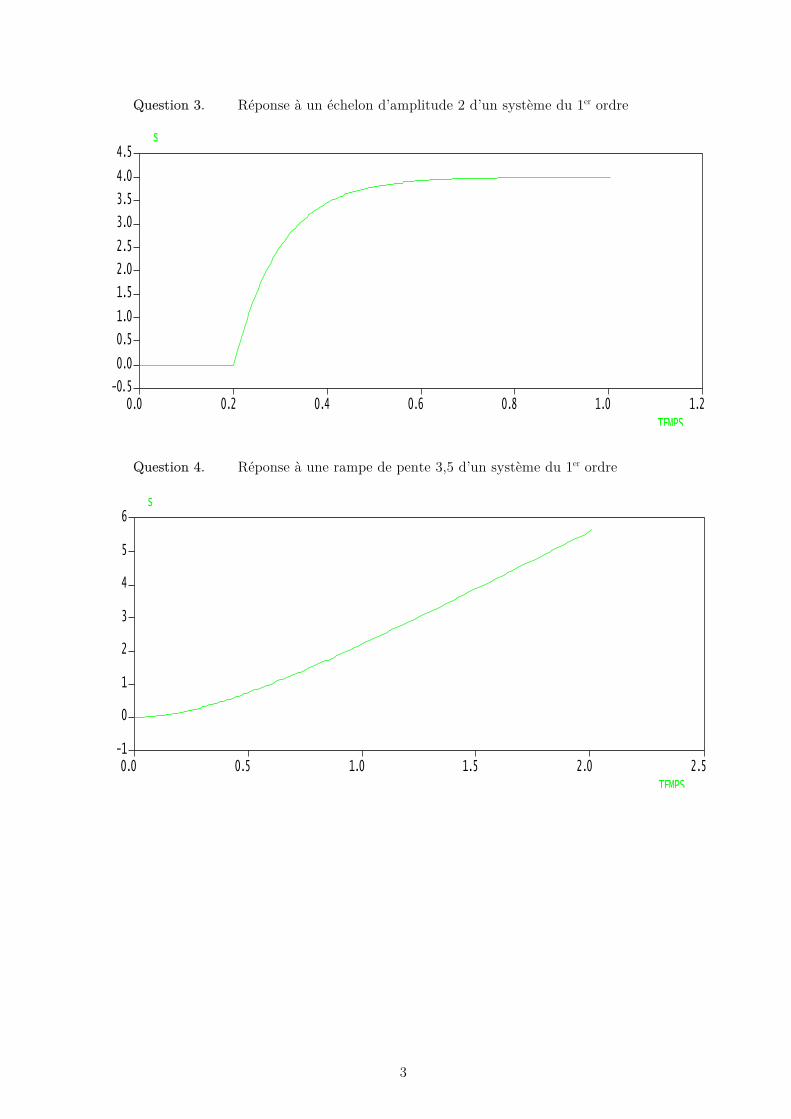
Question 3. Réponse à un échelon d’amplitude 2 d’un système du 1er ordre
Question 4. Réponse à une rampe de pente 3,5 d’un système du 1er ordre
05/10/1118:07:25
AAB6.TMPAAB5.TMPDID'ACSYDE REPONSE TEMPORELLE
0.0 0.2 0.4 0.6 0.8 1.0 1.2-0.5
0.0
0.5
1.0
1.5
2.0
2.5
TEMPS
e
0.0 0.2 0.4 0.6 0.8 1.0 1.2-0.5
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
4.5
TEMPS
s05/10/1118:03:22
AAB1.TMPAAB0.TMPDID'ACSYDE REPONSE TEMPORELLE
0.0 0.5 1.0 1.5 2.0 2.5-1
0
1
2
3
4
5
6
7
8
TEMPS
e
0.0 0.5 1.0 1.5 2.0 2.5-1
0
1
2
3
4
5
6
TEMPS
s
4
Exercice II : Instrument IBIS pour la biologie spatiale
(Extrait du sujet des petites mines 1999)
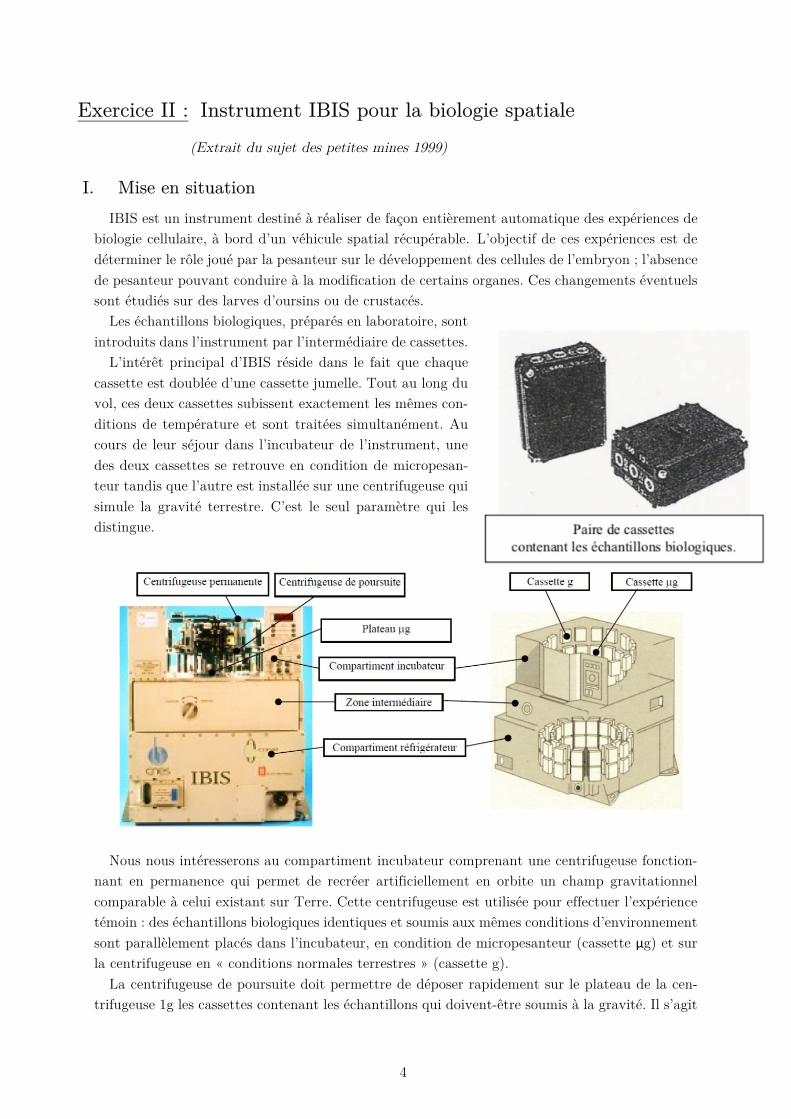
I. Mise en situation IBIS est un instrument destiné à réaliser de façon entièrement automatique des expériences de
biologie cellulaire, à bord d’un véhicule spatial récupérable.L’objectif de ces expériences est de déterminer le rôle joué par la pesanteur sur le développement des cellules de l’embryon ; l’absence de pesanteur pouvant conduire à la modification de certains organes. Ces changements éventuels sont étudiés sur des larves d’oursins ou de crustacés.
Les échantillons biologiques, préparés en laboratoire, sont introduits dans l’instrument par l’intermédiaire de cassettes.
L’intérêt principal d’IBIS réside dans le fait que chaque cassette est doublée d’une cassette jumelle. Tout au long du vol, ces deux cassettes subissent exactement les mêmes con-ditions de température et sont traitées simultanément. Au cours de leur séjour dans l’incubateur de l’instrument, une des deux cassettes se retrouve en condition de micropesan-teur tandis que l’autre est installée sur une centrifugeuse qui simule la gravité terrestre. C’est le seul paramètre qui les distingue.
Nous nous intéresserons au compartiment incubateur comprenant une centrifugeuse fonction-
nant en permanence qui permet de recréer artificiellement en orbite un champ gravitationnel comparable à celui existant sur Terre. Cette centrifugeuse est utilisée pour effectuer l’expérience témoin : des échantillons biologiques identiques et soumis aux mêmes conditions d’environnement sont parallèlement placés dans l’incubateur, en condition de micropesanteur (cassette μg) et sur la centrifugeuse en « conditions normales terrestres » (cassette g).
La centrifugeuse de poursuite doit permettre de déposer rapidement sur le plateau de la cen-trifugeuse 1g les cassettes contenant les échantillons qui doivent-être soumis à la gravité. Il s’agit
5
donc de faire coïncider la position de la cassette g sur la centrifugeuse de poursuite avec un emplacement libre choisi à l’avance de la centrifugeuse permanente.
Objectif : Mises-en place d’un asservissement en vitesse et en position afin de valider les cri-
tères de précision et de vitesse.
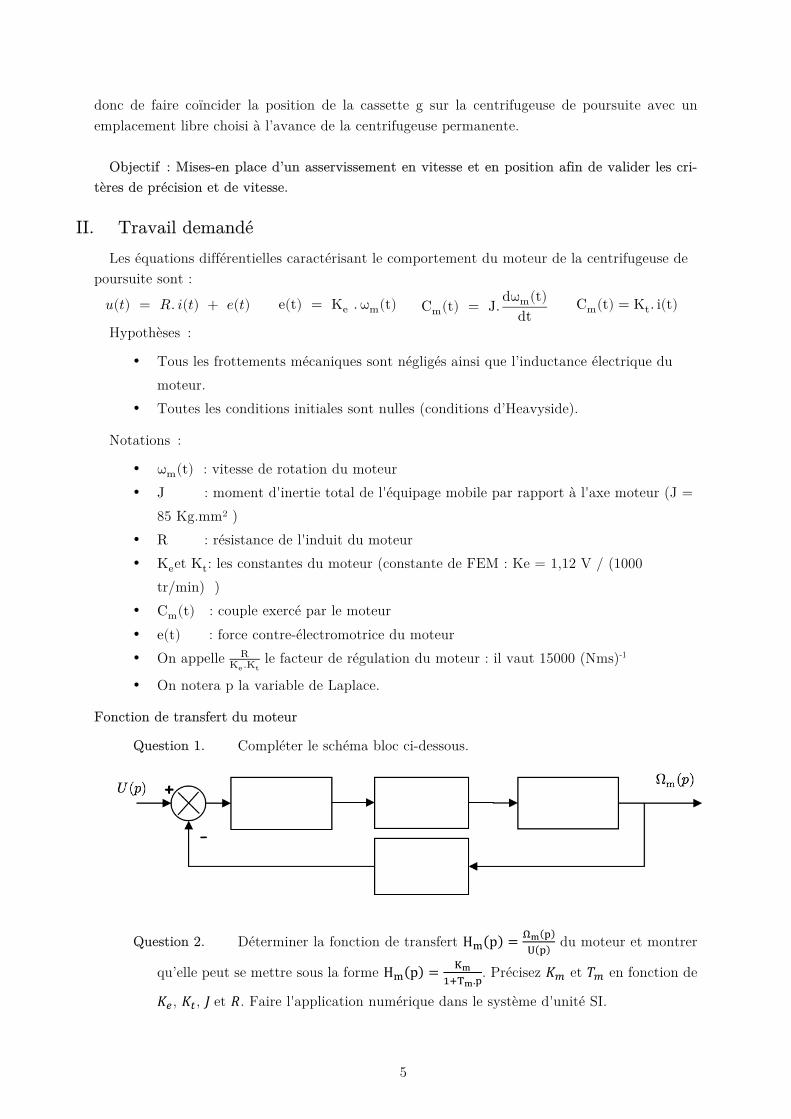
II. Travail demandé Les équations différentielles caractérisant le comportement du moteur de la centrifugeuse de
poursuite sont :
𝑢(𝑡) = 𝑅. 𝑖(𝑡) + 𝑒(𝑡) e(t) = Ke . ωm(t) Cm(t) = J.dωm(t)
dt Cm(t) = Kt. i(t)
Hypothèses :
• Tous les frottements mécaniques sont négligés ainsi que l’inductance électrique du moteur.
• Toutes les conditions initiales sont nulles (conditions d’Heavyside).
Notations :
• ωm(t) : vitesse de rotation du moteur • J : moment d'inertie total de l'équipage mobile par rapport à l'axe moteur (J =
85 Kg.mm² ) • R : résistance de l'induit du moteur • Keet Kt: les constantes du moteur (constante de FEM : Ke = 1,12 V / (1000
tr/min) ) • Cm t : couple exercé par le moteur • e(t) : force contre-électromotrice du moteur • On appelle R
Ke.Kt le facteur de régulation du moteur : il vaut 15000 (Nms)-1
• On notera p la variable de Laplace.
Fonction de transfert du moteur
Question 1. Compléter le schéma bloc ci-dessous.
Question 2. Déterminer la fonction de transfert H" p = %& '( '
du moteur et montrer
qu’elle peut se mettre sous la forme H" p = )&*+,&.'
. Précisez 𝐾/ et 𝑇/ en fonction de
𝐾1, 𝐾2, 𝐽et 𝑅. Faire l'application numérique dans le système d'unité SI.

6
Question 3. Calculer et tracer la réponse indicielle de ce moteur. Question 4. En déduire le temps de réponse à 5%.
Asservissement en vitesse de la centrifugeuse L'asservissement en vitesse est réalisé par :
• Un amplificateur du signal d'écart entre la vitesse de consigne de la centrifugeuse 𝜔0 𝑡 et la vitesse mesurée 𝜔1 𝑡 . Cet amplificateur de gain 𝐾1 fournit la tension 𝑈(𝑡) de commande du moteur.
• Le moteur modélisé à la question précédente.
• Un réducteur de vitesse, de rapport de réduction𝑟 = ;< 2;= 2
= *>?
• Un capteur de vitesse. Pour simplifier le schéma-bloc, on choisit de modéliser le capteur de vitesse angulaire par un gain unitaire. On comparera ainsi directement la vitesse mesurée à la vitesse de consigne.
Question 5. Complétez le schéma bloc de l'asservissement de vitesse entre ωc t et ωs t .
Question 6. Montrer que la fonction de transfert peut s’écrire sous la forme Ωs p
Ωc p = Kv
1+Tv .p. Exprimer ses paramètres caractéristiques 𝐾<et 𝑇< en fonction de 𝐾1.
L'étape transitoire correspondant à l'asservissement en vitesse de la centrifugeuse ne doit pas
excéder 1,5 s d’après le cahier des charges. Cette étape correspond à un échelon de vitesse ωA t ; on considère que la vitesse est effectivement atteinte lorsque que la vitesse mesurée vaut 95% de la vitesse de consigne.
Question 7. Calculer alors le gain minimal de l'amplificateur K1 afin de validé le ca-hier des charges et préciser son unité.
7
Asservissement en position de la centrifugeuse L'asservissement en position est réalisé par :
• Un amplificateur du signal d'écart entre la position de consigne de la centrifugeuse 𝜃0(𝑡) et la position mesurée 𝜃D(𝑡). Ce correcteur de gain 𝐾2 fournit la vitesse de con-signe ωc t à la boucle de vitesse.
• L'asservissement de vitesse modélisé à la question précédente. Indépendamment des résultats obtenus, on prendra @A B
@C B = 0,61+0,5 .B
• Un capteur de position. Comme précédemment, pour simplifier la schématisation, on choisit de modéliser le capteur de position par un gain unitaire. On comparera ainsi directement la position mesurée à la position de consigne.
Question 8. Tracer le schéma bloc de l'asservissement de position entre θc(t) et θs(t).
Question 9. Déterminer la fonction de transfert, la mettre sous forme canonique et donner ses paramètres caractéristiques (gain, classe, ordre).
Question 10. Déterminer le gain K> pour que la fonction de transfert IA BIC B soit mise
sous forme Kc1+Tc .p 2.
Le cahier des charges impose pour une réponse indicielle une erreur entre l’entrée et la sortie nulle.
Question 11. Déterminer la réponse indicielle à cet asservissement, tracer son allure et en déduire l’erreur statique. Conclure sur le cahier des charges.
Remarque : on donne la propriété de la translation complexe :𝐿−1 𝐹 𝑝 + 𝑎 = 𝑓 𝑡 . 𝑒−QR
8
Exercice III : Gouverneur de profondeur d’air bus
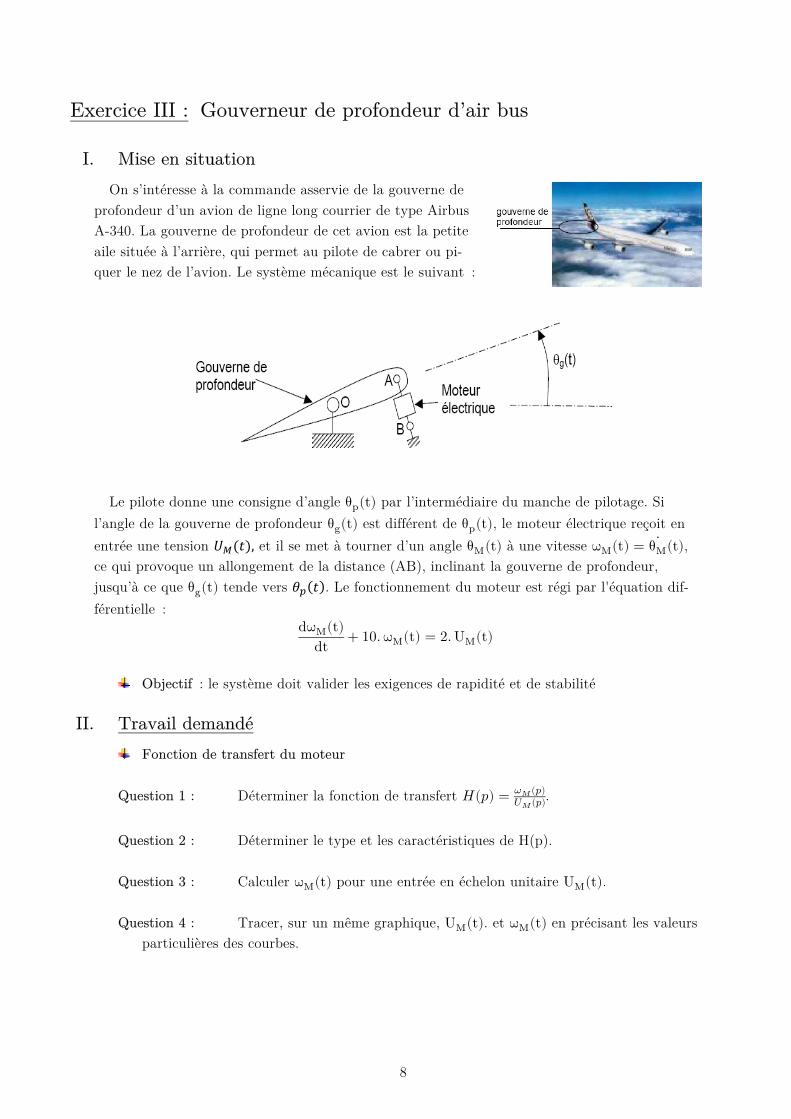
I. Mise en situation On s’intéresse à la commande asservie de la gouverne de
profondeur d’un avion de ligne long courrier de type Airbus A-340. La gouverne de profondeur de cet avion est la petite aile située à l’arrière, qui permet au pilote de cabrer ou pi-quer le nez de l’avion. Le système mécanique est le suivant :
Le pilote donne une consigne d’angle θp t par l’intermédiaire du manche de pilotage. Si
l’angle de la gouverne de profondeur θg t est différent de θp t , le moteur électrique reçoit en entrée une tension 𝑈F(𝑡), et il se met à tourner d’un angle θM t à une vitesse ωM t = θM t , ce qui provoque un allongement de la distance (AB), inclinant la gouverne de profondeur, jusqu’à ce que θg t tende vers 𝜃H 𝑡 . Le fonctionnement du moteur est régi par l'équation dif-férentielle :
dωM(t)dt
+ 10. ωM t = 2. UM(t)
Objectif : le système doit valider les exigences de rapidité et de stabilité
II. Travail demandé Fonction de transfert du moteur
Question 1 : Déterminer la fonction de transfert 𝐻 𝑝 = VW B
XW (B).
Question 2 : Déterminer le type et les caractéristiques de H(p).
Question 3 : Calculer ωM(t) pour une entrée en échelon unitaire UM(t).
Question 4 : Tracer, sur un même graphique, UM(t). et ωM t en précisant les valeurs particulières des courbes.

9
Le schéma bloc du mécanisme d’orientation de la gouverne est le suivant (la fonction de transfert H(p) y a été intégrée) :
C(p) est la fonction de transfert d’un correcteur. G(p) (≠ H(p)) est la fonction de transfert du moteur et du mécanisme de transformation de mouvement.
Question 5 : Déterminer la fonction de transfert HT p = θg p
θp(p) en fonction de C(p) et
de G(p). On suppose C(p) = C (constante) et 𝐺 𝑝 = 2
10+B . 1B . 1
150 .
Question 6 : Déterminer le type et les caractéristiques de HT p en fonction de C. Question 7 : Déterminer l’erreur statique pour une entrée en échelon unitaire. Conclure
quant à la capacité de la gouverne de profondeur à suivre les commandes du pilote. 1ère exigence : on souhaite obtenir le système le plus rapide sans dépassement. Question 8 : Déterminer la valeur de C. Question 9 : En déduire le temps de réponse à 5%.
2ème exigence : on souhaite obtenir le système le plus rapide avec un dépassement de 1,5%
maximum. Question 10 : Déterminer la valeur de C. Question 11 : En déduire le temps de réponse à 5%.
3ème exigence : on souhaite obtenir un temps de réponse de 0,1 s. Question 12 : Est-ce possible avec le correcteur étudié ?
10
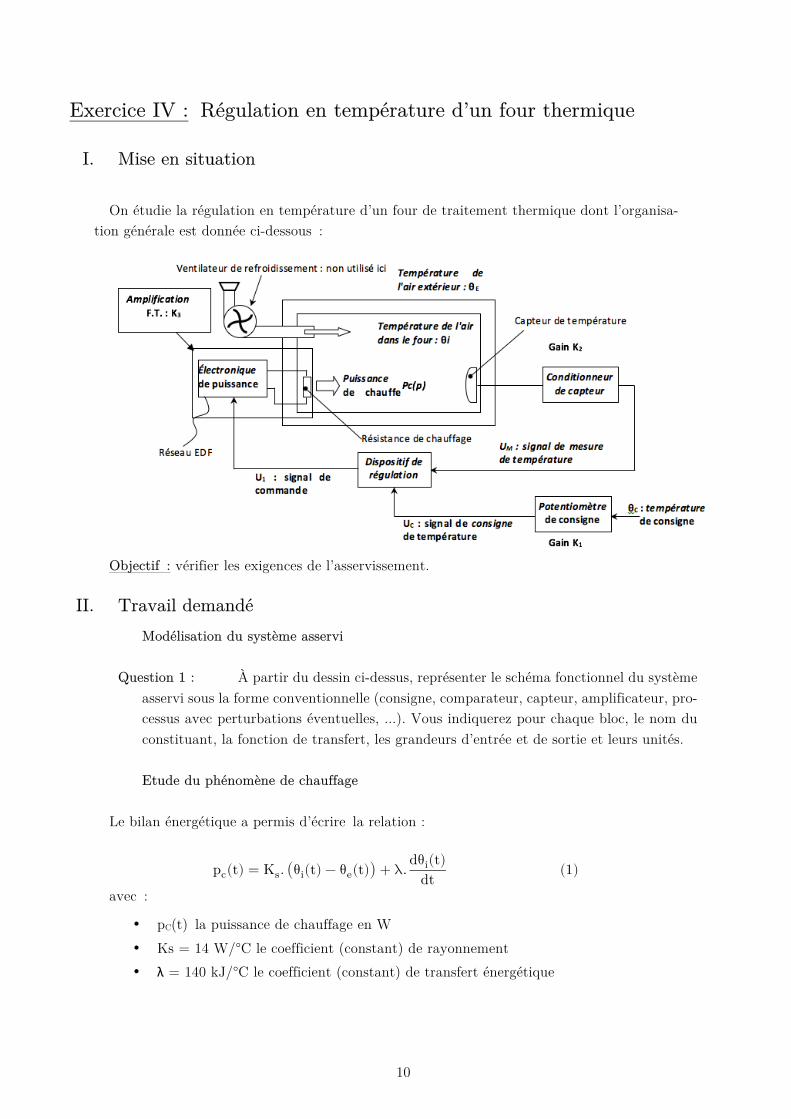
Exercice IV : Régulation en température d’un four thermique
I. Mise en situation On étudie la régulation en température d’un four de traitement thermique dont l’organisa-
tion générale est donnée ci-dessous :
Objectif : vérifier les exigences de l’asservissement.
II. Travail demandé Modélisation du système asservi
Question 1 : À partir du dessin ci-dessus, représenter le schéma fonctionnel du système asservi sous la forme conventionnelle (consigne, comparateur, capteur, amplificateur, pro-cessus avec perturbations éventuelles, ...). Vous indiquerez pour chaque bloc, le nom du constituant, la fonction de transfert, les grandeurs d’entrée et de sortie et leurs unités.
Etude du phénomène de chauffage
Le bilan énergétique a permis d’écrire la relation :
pc t = Ks. θi t − θe t + λ.dθi t
dt (1)
avec :
• pC(t) la puissance de chauffage en W • Ks = 14 W/°C le coefficient (constant) de rayonnement • λ = 140 kJ/°C le coefficient (constant) de transfert énergétique

11
On se propose d’étudier le phénomène de chauffage en hiver dans les conditions les plus défa-vorables rencontrées dans le lieu d’utilisation du four et correspondant à θi(0) = 0 °C.
Question 2 : Montrer que ΘJ p = *
*+,.'α. PA p + ΘN p , avec α et T à calculer litté-
ralement.
On se place dans le cas particulier où 𝜃`(𝑡) = 0°𝐶 ∀ t. Question 3 : Donner littéralement puis numériquement le gain statique du système de
chauffage et la constante de temps de ce système de chauffage d’entrée la puissance pC(t) et de sortie la température θi(t).
À l’instant t = 0, la puissance PC(t) passe brutalement de la valeur nulle à la valeur PCO = 10
kW (ce qui n’est absolument pas physiquement cohérent, mais bien pratique pour l’étude qui suit) et est ensuite maintenue constante au cours du temps.
Question 4 : Définir le type et l’amplitude du signal d’entrée, la température finale
atteinte 𝜃b et le temps de réponse à 5 %. Question 5 : En utilisant les théorèmes des valeurs initiale et finale, représenter l’allure
de la courbe d’évolution de 𝜃c(𝑡) en indiquant précisément les valeurs remarquables. Question 6 : Déterminer l’expression de 𝜃c(𝑡).
Etude du système bouclé
La modélisation retenue sera la suivante :
G=2 W/°C et 𝐹 𝑝 = Q
*+R.H avec 𝐾 = *
*S= 0,286°𝐶/𝑊 et 𝑇 = 10000𝑠
Question 7 : En comparant avec la modélisation trouvée à la question 1., justifier le
modèle retenu. Question 8 : Donner la fonction de transfert en boucle ouverte 𝐻de 𝑝 = Θg B
ΘC B . Préci-ser le gain KBO et la constante de temps en boucle ouverte TBO.
Question 9 : Exprimer la fonction de transfert en boucle fermée 𝐻dh 𝑝 = Θg BΘC B . Pré-
ciser le gain KBF et la constante de temps en boucle fermée TBF. Donner l’influence du bouclage par retour unitaire.
Question 10 : Exprimer 𝜀 𝑝 en fonction de Θ0 𝑝 et 𝐻de 𝑝 .

12
Question 11 : Pour une entrée échelon 𝜃_ 𝑡 = 𝜃_?, calculer l’erreur statique pour le sys-tème non bouclé et pour le système bouclé. Exprimer l’erreur en pourcentage de l’entrée. Conclusions.
Question 12 : Pour le système bouclé et pour le système non bouclé, représenter 𝜃_ 𝑡 , 𝜃` 𝑡 sur un même graphe pour une entrée en échelon unitaire. Faire apparaître l’erreur statique.
Question 13 : Calculer le gain G qui permet d’annuler l’erreur statique pour le système non bouclé. Quel est alors l’erreur statique en boucle fermée. Peut-on diminuer, voire annuler l’erreur statique pour le système bouclé ?
Étude du phénomène de refroidissement
Condition initiale : 𝜃c(0) = 𝜃cb . On suppose de plus que 𝜃`(𝑡) = 𝜃j = 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡𝑒 ∀ t et 𝜃j < 𝜃cb . Question 14 : Montrer, à partir de la relation (1), que 𝜃c(𝑝) peut s’écrire :
θi(p) = F1(p). θif + F2(p). θE + F3(p). PC(p) où F1(p) et F2(p) sont des fonctions dépendant de T et F3(p) est une fonction dépen-
dant de T et α définis à la question 2. On se propose maintenant d’étudier une panne intempestive de chauffage, ce qui correspond
à PC(p) = 0. Question 15 : Calculer, en fonction des données 𝜃cb et 𝜃j , les valeurs limites de la fonc-
tion 𝜃c(𝑡) et de sa dérivée stg RsR lorsque t → 0 et lorsque t → + ∞. Tracer l’allure de
𝜃c(𝑡) . Question 16 : En utilisant le tableau des transformées de Laplace, déterminer l’expres-
sion de 𝜃c 𝑡 . Question 17 : Calculer en fonction de T le temps mis par la température 𝜃c(𝑡) pour
atteindre la température 𝜃j à 5 % près. AN : 𝜃j = 20°C et 𝜃cb = 1000°C.
2ème consigne de chauffage
À l’instant t = 0, on impose une loi de montée en puissance de telle façon que celle-ci évolue
linéairement de la valeur nulle à la valeur PCO = 20 kW en t1 = 1 heure (ce qui n’est pas si fa-cile). Cette valeur est ensuite maintenue constante au cours du temps. On suppose à nouveau θ e(t) = 0°C ∀ t
Question 18 : Définir le type et l’amplitude des signaux d’entrée pour t ∈ [0 ; t1] puis
pour t > t1. Question 19 : En utilisant les théorèmes des valeurs initiale et finale, indiquer précisé-
ment les valeurs remarquables pour t ∈ [0 ; t1] puis pour t > t1. Question 20 : En utilisant le tableau des transformées de Laplace, déterminer l’expres-
sion de 𝜃c(𝑡) pour t ∈ [0 ; t1] puis pour t > t1. Représenter la courbe d’évolution de 𝜃c 𝑡 .
13
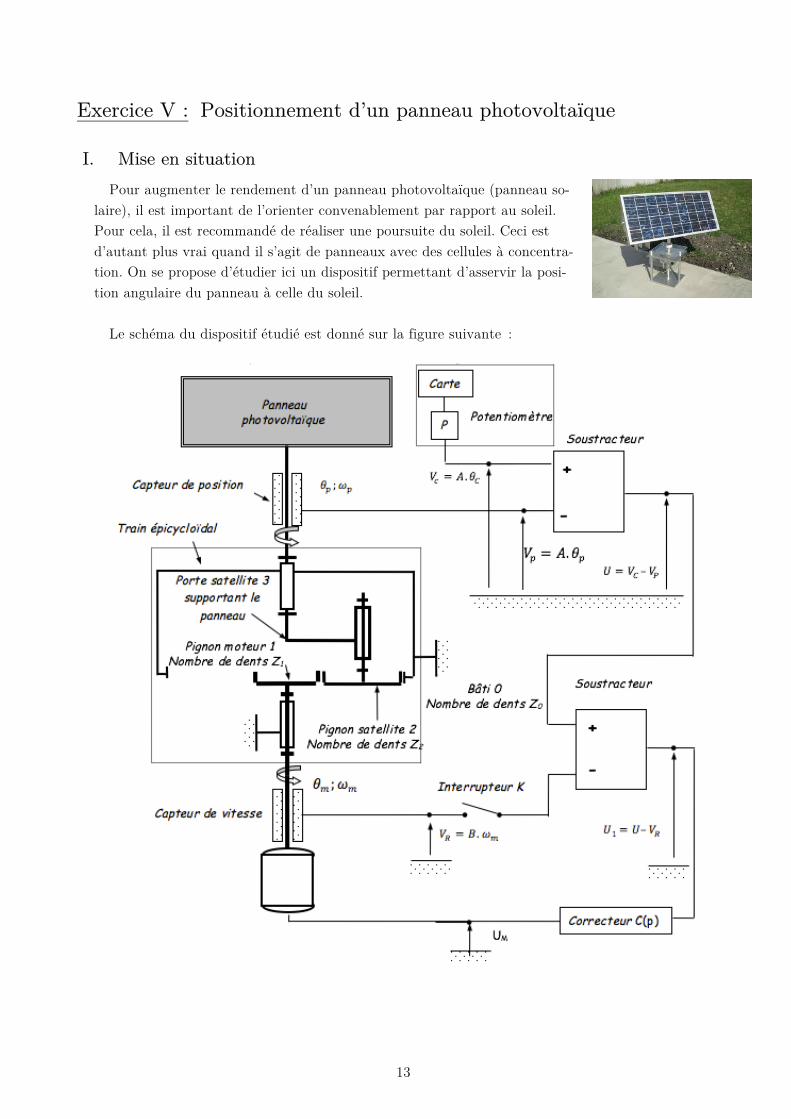
Exercice V : Positionnement d’un panneau photovoltaïque
I. Mise en situation Pour augmenter le rendement d’un panneau photovoltaïque (panneau so-
laire), il est important de l’orienter convenablement par rapport au soleil. Pour cela, il est recommandé de réaliser une poursuite du soleil. Ceci est d’autant plus vrai quand il s’agit de panneaux avec des cellules à concentra-tion. On se propose d’étudier ici un dispositif permettant d’asservir la posi-tion angulaire du panneau à celle du soleil.
Le schéma du dispositif étudié est donné sur la figure suivante :
14
On considèrera :
• Fonction de transfert du moteur : 𝑀 𝑝 = Ωv BUv B = 1
1+Tv.B avec Tm=100s
• Potentiomètre :V𝐶 𝑝 = 𝐴. θ𝑐(𝑝) • Capteur de position angulaire : VB 𝑝 = 𝐴. θB 𝑝 (AN : 𝐴 = 10
y 𝑉 . 𝑟𝑎𝑑−1)
• Correcteur : U 𝑝 = 𝐶 𝑝 . U1 𝑝 (C(p) = 1) • Capteur de vitesse : V~ 𝑝 = 𝐵. Ω 𝑝
• Train épicycloïdal constitué des pièces 0, 1, 2 et 3, on peut montrer que : θ(R)θv(R) = 0,1
Objectif : vérifier les exigences de l’asservissement en positon et en vitesse.
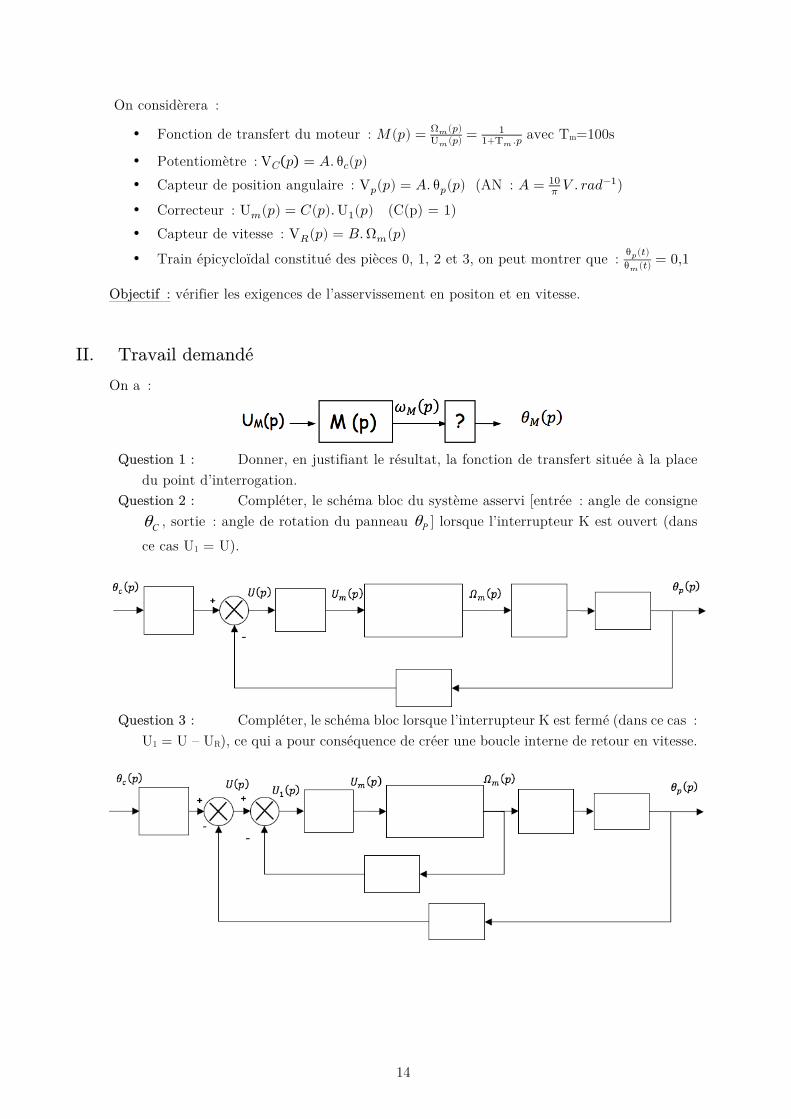
II. Travail demandé On a :
Question 1 : Donner, en justifiant le résultat, la fonction de transfert située à la place
du point d’interrogation. Question 2 : Compléter, le schéma bloc du système asservi [entrée : angle de consigne
Cθ , sortie : angle de rotation du panneau Pθ ] lorsque l’interrupteur K est ouvert (dans
ce cas U1 = U).
Question 3 : Compléter, le schéma bloc lorsque l’interrupteur K est fermé (dans ce cas :
U1 = U – UR), ce qui a pour conséquence de créer une boucle interne de retour en vitesse.
15
Question 4 : On considère le système sans retour tachymétrique (interrupteur K ou-vert) :
a. Déterminer la fonction de transfert 𝐻(𝑝) = bc Hbd H
b. Donner les valeurs de la pulsation propre ω0, du coefficient d’amortissement z et du gain statique K du système.
c. L’entrée est un échelon d’angle : θC(t) = θ0.u(t). Après avoir déterminé la valeur du premier dépassement D1% et la période des oscillations TP, tracer l’allure de la réponse indicielle de ce système. Donner le temps de réponse à 5 % en utilisant l’abaque du cours.
Question 5 : On considère le système avec retour tachymétrique (interrupteur K fermé) :
d. Déterminer la fonction de transfert 𝐻(𝑝) = bc Hbd H
en fonction de B
e. Donner les expressions de la pulsation propre ω0, du coefficient d’amortis-sement z et du gain K en fonction de B.
f. Déterminer la valeur de B pour avoir le système le plus rapide. g. Donner alors les valeurs de la pulsation propre ω0 du système. h. L’entrée est un échelon d’angle : θC(t) = θ0.u(t). Tracer l’allure de la ré-
ponse indicielle de ce système. Donner le temps de réponse à 5 % en utilisant l’abaque fourni.
Question 6 : Quelle a été l’influence du retour tachymétrique ?


















