INCLUSIONS RIGIDES EN CENTRIFUGEUSE : … 2010 pp 721-728... · statique et dynamique du principe...
8
Journées Nationales de Géotechnique et de Géologie de l’Ingénieur JNGG2010 -Grenoble 7-9 juillet 2010 INCLUSIONS RIGIDES EN CENTRIFUGEUSE : DEVELOPPEMENT D’UN DISPOSITIF EXPERIMENTAL A PLATEAU MOBILE STIFF PILES IN CENTRIFUGE : DEVELOPMENT OF THE EXPERIMENTAL MOBILE TRAY DEVICE Gérard RAULT 1 , Stéphane BUTTIGIEG 2 , Luc THOREL 1 , François DERKX 2 , Umur OKYAY 3 , Gonzague SIX 2 , Alain NEEL 1 1 LCPC, Nantes, France 2 LCPC, Paris, France 3 INSA, Lyon, France RÉSUMÉ – Les inclusions rigides sont de plus en plus utilisées pour le renforcement des sols compressibles sous des ouvrages en génie civil. Les charges sont transfé- rées sur les inclusions via un matelas constitué de matériau granulaire ou de sol trai- té. Afin d’étudier les mécanismes de transfert des charges, un dispositif embarqué en centrifugeuse a été développé. ABSTRACT – Stiff piles are more and more used for the reinforcement of soft soils below civil engineering structures. The charges are transferred on the stiff piles through a mattress made of granular materials or hydraulic binder treated soils. To study the load transfer mechanisms, a special device boarded in centrifuge was de- veloped using geometrical and physical dispositions. 1. Introduction L’amélioration des sols par inclusions rigides augmente la capacité portante du sol et diminue les tassements de l’ouvrage (Briançon 2002, Briançon et al. 2004). Cette technique est de plus en plus utilisée pour le renforcement des remblais et des ou- vrages en génie civil (Simon & Schlosser 2006, ASIRI). Le plus fameux exemple est peut-être celui du pont Rion-Antirion, dont les piles reposent sur un matelas granu- laire disposé sur l’argile marine renforcée par inclusions rigides. Le comportement statique et dynamique du principe de fonctionnement de l’ouvrage a été testé en centrifugeuse (Garnier & Pecker 1999, Rault et al. 2006). Le principe consiste à disposer un matelas de transfert de charge, constitué de matériaux pulvérulents ou de sol traité, placé entre le sol renforcé par inclusions rigi- des et l’ouvrage. Des mécanismes de cisaillement, compression et extension, dits d’« effet de voûte » se développent dans le matelas. Ces mécanismes dépendent non seulement des caractéristiques mécaniques des matériaux et de leurs interac- tions, mais aussi de la disposition géométrique du groupe d’inclusions rigides. Pour mieux comprendre ces mécanismes de transfert des charges et identifier les paramètres influents, le sol compressible est remplacé par un plateau rigide mobile perforé dont on pilote le déplacement vertical pour simuler le tassement du sol. Les inclusions traversent le plateau et poinçonnent le matelas disposé au dessus. Le rapport de la surface couverte par le groupe d’inclusions et la surface totale du plateau définit le taux de couverture α. Plusieurs maillages peuvent être réalisés. Des capteurs de force mesurent le report des efforts transmis sur les têtes d’inclusion, lors de la descente du plateau piloté à vitesse contrôlée. 721
Transcript of INCLUSIONS RIGIDES EN CENTRIFUGEUSE : … 2010 pp 721-728... · statique et dynamique du principe...

Journées Nationales de Géotechnique et de Géologie de l’Ingénieur JNGG2010 -Grenoble 7-9 juillet 2010
INCLUSIONS RIGIDES EN CENTRIFUGEUSE : DEVELOPPEMENT D’UN DISPOSITIF EXPERIMENTAL A PLATEAU MOBILE
STIFF PILES IN CENTRIFUGE : DEVELOPMENT OF THE EXPERIMENTAL MOBILE TRAY DEVICE
Gérard RAULT1, Stéphane BUTTIGIEG2, Luc THOREL1, François DERKX2, Umur OKYAY3, Gonzague SIX2, Alain NEEL1
1 LCPC, Nantes, France 2 LCPC, Paris, France 3 INSA, Lyon, France
RÉSUMÉ – Les inclusions rigides sont de plus en plus utilisées pour le renforcement des sols compressibles sous des ouvrages en génie civil. Les charges sont transfé-rées sur les inclusions via un matelas constitué de matériau granulaire ou de sol trai-té. Afin d’étudier les mécanismes de transfert des charges, un dispositif embarqué en centrifugeuse a été développé.
ABSTRACT – Stiff piles are more and more used for the reinforcement of soft soils below civil engineering structures. The charges are transferred on the stiff piles through a mattress made of granular materials or hydraulic binder treated soils. To study the load transfer mechanisms, a special device boarded in centrifuge was de-veloped using geometrical and physical dispositions.
1. Introduction L’amélioration des sols par inclusions rigides augmente la capacité portante du sol
et diminue les tassements de l’ouvrage (Briançon 2002, Briançon et al. 2004). Cette technique est de plus en plus utilisée pour le renforcement des remblais et des ou-vrages en génie civil (Simon & Schlosser 2006, ASIRI). Le plus fameux exemple est peut-être celui du pont Rion-Antirion, dont les piles reposent sur un matelas granu-laire disposé sur l’argile marine renforcée par inclusions rigides. Le comportement statique et dynamique du principe de fonctionnement de l’ouvrage a été testé en centrifugeuse (Garnier & Pecker 1999, Rault et al. 2006).
Le principe consiste à disposer un matelas de transfert de charge, constitué de matériaux pulvérulents ou de sol traité, placé entre le sol renforcé par inclusions rigi-des et l’ouvrage. Des mécanismes de cisaillement, compression et extension, dits d’« effet de voûte » se développent dans le matelas. Ces mécanismes dépendent non seulement des caractéristiques mécaniques des matériaux et de leurs interac-tions, mais aussi de la disposition géométrique du groupe d’inclusions rigides.
Pour mieux comprendre ces mécanismes de transfert des charges et identifier les paramètres influents, le sol compressible est remplacé par un plateau rigide mobile perforé dont on pilote le déplacement vertical pour simuler le tassement du sol. Les inclusions traversent le plateau et poinçonnent le matelas disposé au dessus.
Le rapport de la surface couverte par le groupe d’inclusions et la surface totale du plateau définit le taux de couverture α. Plusieurs maillages peuvent être réalisés. Des capteurs de force mesurent le report des efforts transmis sur les têtes d’inclusion, lors de la descente du plateau piloté à vitesse contrôlée.
721

Journées Nationales de Géotechnique et de Géologie de l’Ingénieur JNGG2010 -Grenoble 7-9 juillet 2010
2. Conception du dispositif expérimental
Le dispositif combine une instrumentation appropriée, et ses contraintes, avec les performances mécaniques d’un système asservi pouvant translater l’ensemble sous charge, en respectant les lois de similitudes imposées par la modélisation physique en centrifugeuse et en évitant les effets d’échelle entre matériau et inclusion.
2.1. Paramètres géométriques
In situ, le diamètre BP des inclusions rigides varient entre 300 à 500mm. Quant
aux matériaux granulaires, un dmaxP = 31,5 mm est souvent retenu pour les ouvrages
courants. Par conséquence, le ratio BP/ dmaxP entre le diamètre d’inclusion et le dia-
mètre maximal des grains varie entre 9,52 et 15,87. Ces données conduisent au compromis entre le choix de l’instrumentation et les dimensions du matelas modélisé pour respecter ce ratio. Le diamètre BM des inclusions rigides est de 25 mm. Le dia-mètre maximal dmax
M du mélange de sable d’Hostun (HN 0.6/1.6) est de 1,6 mm. Ce qui conduit à un rapport de 15,62. Pour couvrir des cas classiques d’ouvrages in situ, le niveau d'accélération centrifugeuse est compris entre 12 et 20g.
Le taux de recouvrement α est le plus souvent inférieur à 5% in situ, ce qui se tra-duit par un entraxe de sP>3,96 BP; cette condition conduit à sM=4BM=100mm. Le diamètre interne du plateau mobile est de 890mm correspondant au matériel cou-ramment déjà utilisé sur la centrifugeuse du LCPC ; il autorise le montage de 61 in-clusions. Dans cette configuration, il est possible de simuler, au maximum, le com-portement d’un groupe de 7×7 inclusions avec un taux de couverture α = 4.92%. D’autres configurations sont envisagées : α = 2,47% (maille de 141×141mm avec 29 inclusions) et α = 1,23% (200×200 mm, 13 inclusions).
2.2. Le matelas de transfert de charge Pour simuler le matelas de transfert de charges, deux types de matériaux sont
prévus. Le matelas granulaire est représenté par un mélange de sable d’Hostun. Le mélange est préparé à partir de 5 fractions du sable d’Hostun (HN38, HN34, HN31, HN04/08, HN06/1.6). Ce matériau a fait l’objet d’une campagne de caractérisation effectuée au CERMES et également utilisé dans l’étude expérimentale (Baudouin et al. 2008). L’épaisseur maximale prévue pour le matelas granulaire est de 100mm ; il est mis en place directement sur le plateau mobile dans un anneau dédié à ce maté-riau. Concernant les matériaux traités, le limon de Goderville a été retenu grâce à son homogénéité et son aptitude au traitement. Une campagne de reconnaissance a permis d’identifier ses caractéristiques géotechniques. Ensuite, des essais de résis-tance ont été effectués à 7, 28 et 90 jours suivant le traitement. Quatre formules de traitement ont été testées et comparées (3%CaO, 6%Ciment, 2%CaO+3%Ciment et 2%CaO+5%Ciment). Parmi ces 4 formules, deux formules ont été retenues pour leur représentativité adaptée aux cas extrêmes de traitement (3%CaO et 6%Ciment) (Okyay et al. 2009). Les teneurs en eau des matériaux utilisés sont d’environ 19% pour une masse volumique sèche maximal de 1,7 g/ cm3. Des galettes de matériaux traitées de 35 et 50 mm d’épaisseur ont été compactées sous une charge dynami-que respectant l’énergie optimale définie par l’essai Proctor normal. Deux demi-anneaux en acier de même diamètre spécialement conçus permettent leur reconsti-tution et leur mise en place sur le plateau mobile.
722
Journées Nationales de Géotechnique et de Géologie de l’Ingénieur JNGG2010 -Grenoble 7-9 juillet 2010
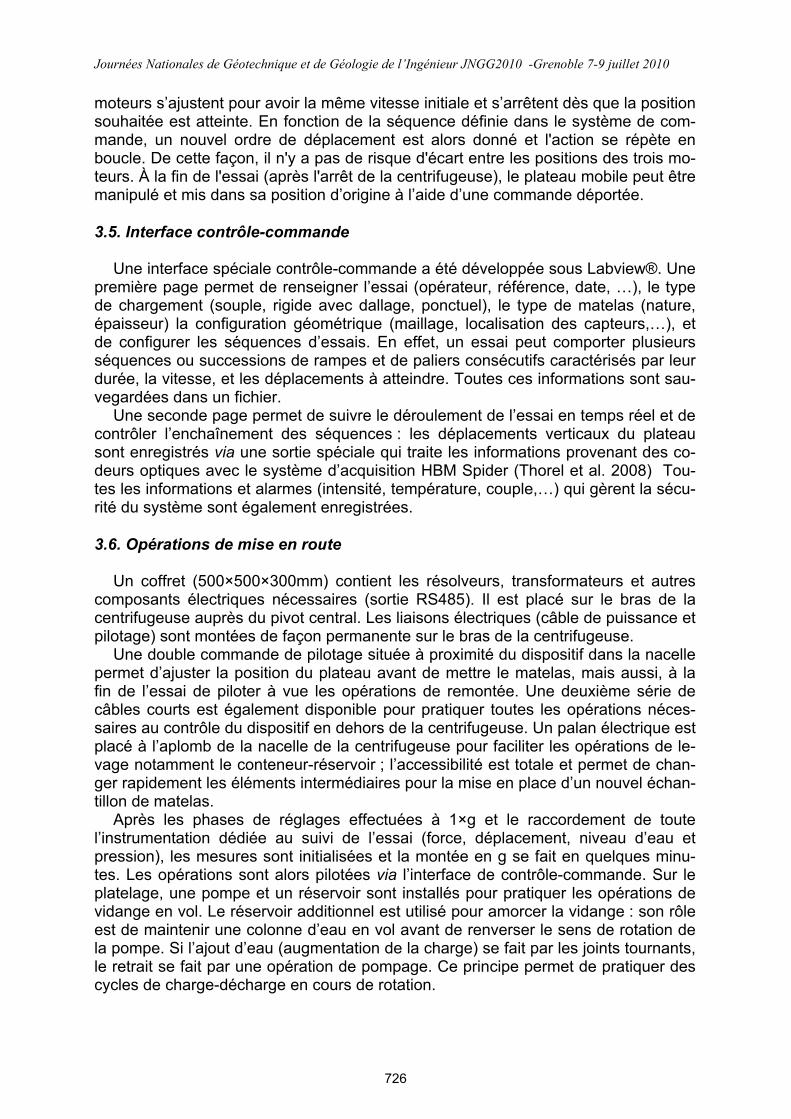
2.3. Le dispositif d’application de surcharge
La charge peut être ponctuelle (générée par un vérin, une masse placée sur le matelas) ou répartie (remplissage du réservoir d’eau avec une membrane souple au contact du matelas de transfert de charge): La simulation d’un dallage est faite en introduisant une plaque semi-rigide en sandwich entre le réservoir et le matelas. Le choix de cette plaque semi-rigide respecte les similitudes en flexion d’un dallage en béton de 12-20cm d’épaisseur (EI= 11kN*m2). Toutefois son poids volumique est particulièrement faible, générant 0,54kPa de contrainte sous 20×g d’accélération.
Le réservoir souple, monté dans un conteneur additionnel en acier de 550mm de hauteur et posé sur le plateau mobile, autorise une surcharge de près de 110kPa. Le poids propre de la membrane souple n’excède pas 4,4kPa. Une pompe permet de vidanger le réservoir sans arrêter la centrifugeuse, et d’appliquer un chargement cy-clique avec des séquences successives de remplissage-vidange. Une vitesse de remplissage de 4 kPa/mn est un bon compromis pour observer le développement des voûtes jusqu’à la rupture (moins de 8 jours en conditions prototype).
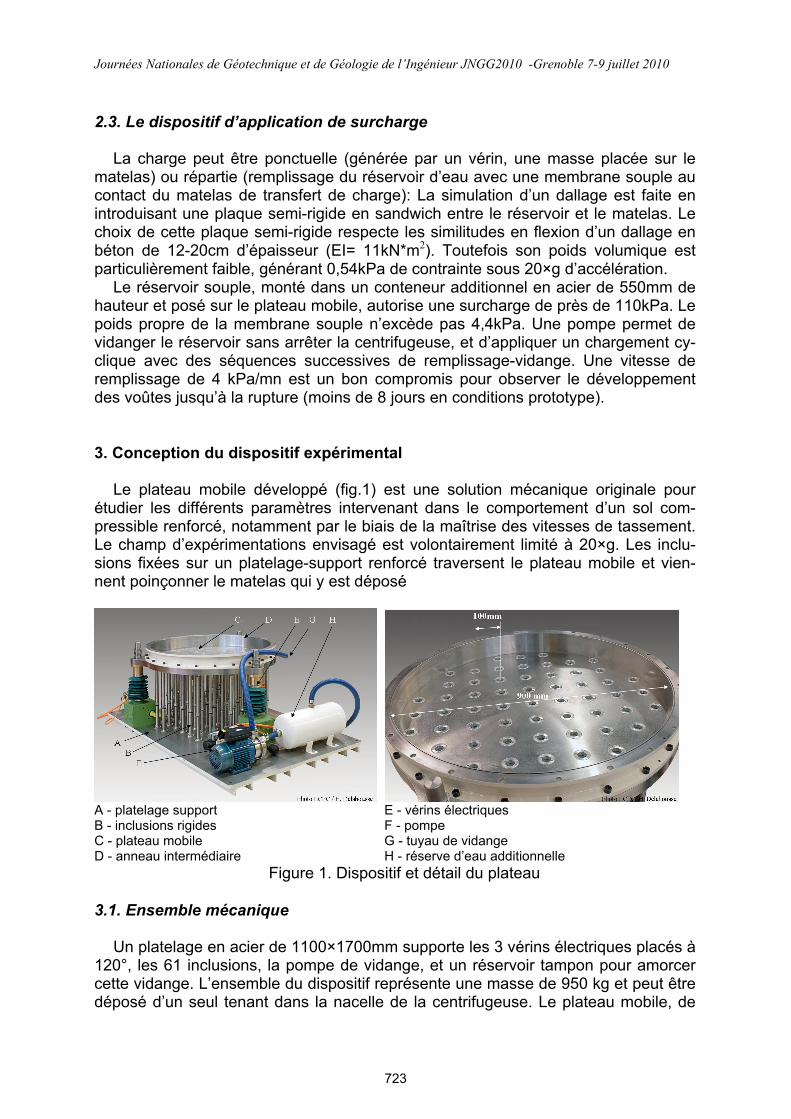
3. Conception du dispositif expérimental Le plateau mobile développé (fig.1) est une solution mécanique originale pour
étudier les différents paramètres intervenant dans le comportement d’un sol com-pressible renforcé, notamment par le biais de la maîtrise des vitesses de tassement. Le champ d’expérimentations envisagé est volontairement limité à 20×g. Les inclu-sions fixées sur un platelage-support renforcé traversent le plateau mobile et vien-nent poinçonner le matelas qui y est déposé
A - platelage support B - inclusions rigides C - plateau mobile D - anneau intermédiaire
E - vérins électriques F - pompe G - tuyau de vidange H - réserve d’eau additionnelle
Figure 1. Dispositif et détail du plateau
3.1. Ensemble mécanique Un platelage en acier de 1100×1700mm supporte les 3 vérins électriques placés à
120°, les 61 inclusions, la pompe de vidange, et un réservoir tampon pour amorcer cette vidange. L’ensemble du dispositif représente une masse de 950 kg et peut être déposé d’un seul tenant dans la nacelle de la centrifugeuse. Le plateau mobile, de
723

Journées Nationales de Géotechnique et de Géologie de l’Ingénieur JNGG2010 -Grenoble 7-9 juillet 2010
40mm d'épaisseur, présente une surface parfaitement usinée et perforée de 61 trous ajustés au diamètre de l’inclusion qui le traverse. Chaque trou est équipé d’un joint torique pour l’étanchéité aux fines et à l’eau (cas de sols saturés). Pour d’autres configurations, certains trous peuvent être obturés avec des bouchons vissés. Le mouvement du plateau est assuré par 3 vis sans fin contrôlées par 3 vérins électri-ques. Au dessus du plateau, différents assemblages mécaniques peuvent être empi-lés selon la nature des essais en cours ou du type de chargement associé.
Un montage de base se présente, du bas vers le haut, d’un premier anneau de 40mm d’épaisseur s’il s’agit de matelas granulaire, ou de 2 demi-anneaux de 15, 35 ou 50mm s’il s’agit de matelas traité, d’un second anneau de 60mm quand une inter-face de type dallage est prévue et enfin du tube réservoir de 550mm de haut.
3.2. Inclusions rigides
A - embout en acier inoxydable
B - capteur de force C - porte capteur D - écrou d’ajustement
E - rondelle Belleville F - pied d’inclusion Figure 2. Inclusion instrumentée et groupe d’inclusions sous le plateau
La longueur des inclusions instrumentées ou non est de 426mm. Les inclusions
faites d’éléments en acier inoxydable de forme cylindrique peuvent être retirées ou permutées rapidement : pour cela seul le pied de l’inclusion est fixé sur le platelage et la partie supérieure est amovible pour recevoir un élément avec ou sans capteur. Neuf inclusions (plus 2 en réserve) ont été instrumentées. Elles se composent de 4 parties (fig.3), du haut vers le pied :
- La tête d’inclusion (A) se pose sur le capteur et elle traverse le plateau mobile. Elle reste en contact avec le joint d’étanchéité au niveau du plateau.
- Le capteur de force (B), (GAROS, étendue de mesure 4000N à 0,15%). - Une tige pleine (C) maintient le capteur par pincement. Une rainure latérale as-
sure la sortie de câble du capteur, qui peut être changé sans dépose du pied (F). - Le pied d’inclusion rigide (F) est vissé sur le platelage rigide ; la partie supérieure
est équipée d’une tige filetée sur laquelle est vissée la pièce (C). l’auto-serrage à la cote de réglage est assuré par un écrou (D) et une rondelle Belleville (E).
Les inclusions non instrumentées sont en acier inoxydable, mais en 2 parties. Le pied est identique aux modèles instrumentés avec le même mécanisme de réglage à la rondelle ressort. La longueur totale de chaque inclusion rigide est strictement la même. Chaque inclusion rigide pèse 1,635kg.
724

Journées Nationales de Géotechnique et de Géologie de l’Ingénieur JNGG2010 -Grenoble 7-9 juillet 2010
3.3. Motorisation du dispositif Le déplacement vertical du plateau est contrôlé par trois actionneurs à vis couplés
par un joint universel, avec un moteur et un réducteur de vitesse. Chaque moteur possède un contrôle de vitesse et un codeur optique à 500 points qui permet d’assurer une vitesse minima de 0.0831 mm/mn. En cas d’arrêt accidentel, un sys-tème de frein à manque de courant immobilise le plateau en position.
Dans la plupart des projets en génie civil, on cherche à minimiser les tassements : par exemple, 20mm maximum pour les projets de stations d’épuration Néanmoins, le modèle réduit permet un déplacement vertical maximal de 50mm, soit le double du diamètre des inclusions rigides, c’est à dire bien au-delà du comportement de ser-vice du matelas. Le tableau I présente les caractéristiques générales du dispositif à plateau mobile.
Tableau I. Caractéristiques du dispositif à plateau mobile
Dimensions hors tout 1700 x 1100mm Poids 950 kg
Diamètre du plateau mobile 894mm Poids du plateau mobile (en service) 400 kg
Couple moteur 33N.m Vitesse minimale de descente 5x10-2mm/mn Vitesse maximale de descente 8mm/mn
Déplacement maximum 50mm Etendue de mesure des capteurs de force 4000N
Niveau d’accélération centrifuge (max) 20g 3.4. Pilotage électronique
Le déplacement vertical du plateau mobile est contrôlé par un système de com-
mande en boucle fermée soit en déplacement soit en vitesse (fig. 3). Dans une ma-chine semi automatique ou automatique, un actionneur est l'organe fournissant la force nécessaire à l'exécution d'un travail ordonné par une unité de commande à distance. L’actionneur maître #1 est contrôlé par le dispositif de contrôle de vitesse ωc. Les deux autres actionneurs sont contrôlés par le maître en fonction de la vitesse réelle du moteur (ω1).
Figure 3. Schéma du contrôle de vitesse entre vérin maître et esclaves. Par conséquence, les trois moteurs tournent à la même vitesse. Les codeurs op-
tiques, placés dans chaque moteur, permettent de contrôler et mesurer la vitesse du plateau mobile. Lorsque l'ordre est donné pour le déplacement du plateau, les trois
725
Journées Nationales de Géotechnique et de Géologie de l’Ingénieur JNGG2010 -Grenoble 7-9 juillet 2010
moteurs s’ajustent pour avoir la même vitesse initiale et s’arrêtent dès que la position souhaitée est atteinte. En fonction de la séquence définie dans le système de com-mande, un nouvel ordre de déplacement est alors donné et l'action se répète en boucle. De cette façon, il n'y a pas de risque d'écart entre les positions des trois mo-teurs. À la fin de l'essai (après l'arrêt de la centrifugeuse), le plateau mobile peut être manipulé et mis dans sa position d’origine à l’aide d’une commande déportée.
3.5. Interface contrôle-commande
Une interface spéciale contrôle-commande a été développée sous Labview®. Une
première page permet de renseigner l’essai (opérateur, référence, date, …), le type de chargement (souple, rigide avec dallage, ponctuel), le type de matelas (nature, épaisseur) la configuration géométrique (maillage, localisation des capteurs,…), et de configurer les séquences d’essais. En effet, un essai peut comporter plusieurs séquences ou successions de rampes et de paliers consécutifs caractérisés par leur durée, la vitesse, et les déplacements à atteindre. Toutes ces informations sont sau-vegardées dans un fichier.
Une seconde page permet de suivre le déroulement de l’essai en temps réel et de contrôler l’enchaînement des séquences : les déplacements verticaux du plateau sont enregistrés via une sortie spéciale qui traite les informations provenant des co-deurs optiques avec le système d’acquisition HBM Spider (Thorel et al. 2008) Tou-tes les informations et alarmes (intensité, température, couple,…) qui gèrent la sécu-rité du système sont également enregistrées.
3.6. Opérations de mise en route
Un coffret (500×500×300mm) contient les résolveurs, transformateurs et autres
composants électriques nécessaires (sortie RS485). Il est placé sur le bras de la centrifugeuse auprès du pivot central. Les liaisons électriques (câble de puissance et pilotage) sont montées de façon permanente sur le bras de la centrifugeuse.
Une double commande de pilotage située à proximité du dispositif dans la nacelle permet d’ajuster la position du plateau avant de mettre le matelas, mais aussi, à la fin de l’essai de piloter à vue les opérations de remontée. Une deuxième série de câbles courts est également disponible pour pratiquer toutes les opérations néces-saires au contrôle du dispositif en dehors de la centrifugeuse. Un palan électrique est placé à l’aplomb de la nacelle de la centrifugeuse pour faciliter les opérations de le-vage notamment le conteneur-réservoir ; l’accessibilité est totale et permet de chan-ger rapidement les éléments intermédiaires pour la mise en place d’un nouvel échan-tillon de matelas.
Après les phases de réglages effectuées à 1×g et le raccordement de toute l’instrumentation dédiée au suivi de l’essai (force, déplacement, niveau d’eau et pression), les mesures sont initialisées et la montée en g se fait en quelques minu-tes. Les opérations sont alors pilotées via l’interface de contrôle-commande. Sur le platelage, une pompe et un réservoir sont installés pour pratiquer les opérations de vidange en vol. Le réservoir additionnel est utilisé pour amorcer la vidange : son rôle est de maintenir une colonne d’eau en vol avant de renverser le sens de rotation de la pompe. Si l’ajout d’eau (augmentation de la charge) se fait par les joints tournants, le retrait se fait par une opération de pompage. Ce principe permet de pratiquer des cycles de charge-décharge en cours de rotation.
726

Journées Nationales de Géotechnique et de Géologie de l’Ingénieur JNGG2010 -Grenoble 7-9 juillet 2010
4. Procédure expérimentale Le choix du maillage se fait avant de placer l'ensemble du dispositif dans la centri-
fugeuse. Les équipements auxiliaires sont préparés sur la plaque d'acier en dehors de la centrifugeuse, puis l'ensemble du dispositif est monté sur la centrifugeuse en une seule opération. Néanmoins, lorsque le dispositif est installé dans la nacelle (fig.4), il est possible de changer la configuration des inclusions sans enlever tout le dispositif. En général une série d’essai peut être conduite sans avoir à n’intervenir que sur la partie intermédiaire pour la mise en place d’un nouvel échantillon de mate-las.
A - palan de levage (à 1g) B - membrane en caoutchouc C - conteneur-réservoir D - matelas et anneau intermédiaire E - plateau mobile F - groupe d’inclusions G - vérins électriques et réducteurs H - platelage support
Figure 4. Vue d’ensemble du plateau mobile dans la centrifugeuse
Le matelas granulaire est installé sur le plateau mobile dans un des anneaux
(épaisseur jusqu’à 100mm). Sa densité est contrôlée par la quantité et le volume du matériau. Des boîtes de densité peuvent être placées pour un contrôle a posteriori. Une règle en acier permet d’araser le matériau. Les matelas en sol traité sont préfa-briqués par compaction dynamique dans des demi-anneaux ad hoc (épaisseur 15, 35 et 50mm). Une période de 90 jours devant être observée avant leur placement en machine, oblige à préparer un lot important de galettes de sol avant la campagne d’essai en centrifugeuse ; celle-ci sont protégées et stockées en rack. Ces galettes sont ensuite transférées à plat, de leur zone de stockage vers le plateau mobile déjà embarqué sur la centrifugeuse, par glissement et poussage avec un des demi-anneaux pour éviter toute détérioration.
Le chargement est appliqué avant la simulation du tassement. Les tassements du sol sont simulés par la descente du plateau mobile, à vitesse
contrôlée, entre 0,05 et 1,2 mm/min. Des essais préliminaires ont été réalisés pour vérifier l’aptitude au bon fonction-
nement du système, notamment l’évaluation du frottement induit par les joints tori-ques d’étanchéité autour du fût des inclusions, ainsi que le non-effet de la vitesse de descente du plateau sur la mesure des efforts en tête d’inclusions.
727

Journées Nationales de Géotechnique et de Géologie de l’Ingénieur JNGG2010 -Grenoble 7-9 juillet 2010
En règle générale, un test exécuté pour une configuration donnée est divisé en 3 séquences élémentaires (fig.5) : montée en accélération, application de la surcharge, suivi de la descente du plateau avec l’enchaînement de plusieurs rampes de vitesse de descente (ex : 0.05, 0.1, 0.2, et 1mm/min) et des paliers intermédiaires.
(1) montée à 12g,(2) application de la surcharge,(3) tassement à vitesse contrôlée Figure 5. Essai réalisé sous 12g avec un matelas granulaire de 30mm d’épaisseur La réponse des neuf capteurs est enregistrée en même temps que la mesure rela-
tive des tassements en tête d’inclusions et en milieu de maille.
5. Conclusions Un dispositif expérimental a été conçu afin d’étudier les mécanismes de transfert
dans le matelas d’une fondation composite de type « sol compressible renforcé par inclusions rigides ». Il permet de varier la géométrie du groupe d’inclusions rigides et du matelas, ainsi que les caractéristiques mécaniques et physiques du matelas
6. Remerciements Ce travail a été initié dans le cadre du projet national ASIRI (Amélioration des Sols
par Inclusions RIgides), en coopération avec l’IREX et le support financier de la DRI et de RGCU. Que leur participation soit ici grandement remerciée. 7 Références bibliographiques ASIRI : www.irex-asiri.fr Baudouin G., Rosquoêt F., Canou J., Dupla J.C., Thorel L, Rault G. & Andria-Ntoanina I. 2008. Carac-
térisation mécanique de sables d’Hostun. JNGG08 Nantes, pp491-498. Briançon L. 2002. Renforcement des sols par inclusions rigides. Etat de l’art en France et à l’étranger.
Rapport de l’IREX, 171p Briançon L., Kastner R., Simon B. & Dias D. 2004 Etat des connaisssances. Amélioration des sols par
inclusions rigides. Int Symp. Ground Improvement, presses ENPC, pp15-44 Garnier J. & Pecker A. 1999. Use of centrifuge tests for the validation of innovative concept in founda-
tion engineering. 2nd Int. Conf. on Earthquake geotech. Engng, Lisbon, 7p Okyay U. Dias D., David J.P.& Auriol J.C. 2009. Essais de caractérisation du limon de Goderville trai-
té. Rapport ASIRI n°2.09.3.10. 38p. Rault G., Thorel L. & Garnier J. 2006. Modélisation physique de fondations et d’ouvrages maritimes.
Mécanique et Industries , ISSN1296-2139, vol7, pp 223-230 Simon B. & Schlosser F. 2006 Soil reinforcement by vertical stiff inclusions in France Symp Rigid
Inclusion in difficult conditions, 11-12 mayo, Mexico,22p. Thorel L., Rault G., Garnier J., Murillo C., Gaudicheau P., Néel A. & Favraud C. 2008. Macro-gravity
measurements on reduced-scale models of geotechnical structures. Bulletin de liaison des Ponts et Chaussées ISSN 1269-1496, n° 272-273 spécial Métrologie pp93-131. (http://www.lcpc.fr/fr/sources/blpc/visu.php?voir=273).
728