






Langages
Pages
Légal


الجمهورية الجزائرية االديمقراطية الشعبية
République Algérienne Démocratique et PopulaireMinistère de l'Enseignement Supérieur et de la Recherche Scientifique
Université Djillali Liabès–Sidi Bel-AbbèsFaculté des Sciences de l’Ingénieur
Département d'Electrotechnique
Contrôle de la machine asynchrone :
Commande scalaireCommande vectorielle
Commande directe du couple
Simulation avec le logiciel Matlab/Simulink
Dr A. MeroufelMaître de conférences
Année : 2008/2009
Intelligent Control & Electrical Power Systems Laboratory (ICEPS).

Avant Propos
Le recueil présenté contient trois techniques de commande de la machine asynchrone àsavoir :
- La commande scalaire- La commande vectorielle- La commande directe du couple (DTC : Direct Torque Control)
Les commandes proposées correspondent à la première partie du cours du module« Commande des systèmes électromécaniques » enseigné depuis plusieurs années auxétudiants de magister option ‘Conversion d’énergie’ du département électrotechnique de l’université de Sidi Bel-Abbes.
Ce recueil est destiné d’une part aux étudiants électrotechniques- Ingénieurs : option commande électrique- Magister: option conversion d’énergie- Ecole doctorale : Electrotechnique et ses applications
Et d’autre part, aux ingénieurs électrotechniques qui désirent acquérir quelques connaissancesen commande des machines asynchrones.
Au début de chaque chapitre, on expose un rappel comportant les notions fondamentales de lacommande. On présente le schéma de principe du circuit de commande et de réglage ensuiteon détermine les fonctions de transfert du système. Puis, on détermine les coefficientsoptimaux des régulateurs. Vers la fin du chapitre, on analyse le comportement de la machinepar une série de tests de simulation sous le logiciel Matlab/Simulink.
L’étudiant doit avoir des connaissances de base du logiciel Matlab/Simulink.
Le but de ce recueil estde familiariser l’étudiant avec:Les principes de fonctionnement de la machine, la conception des commandes, l’analyse des dispositifs de réglage et surtout l’étude des performances. D’autre part, de lui apprendreàchoisir judicieusement et correctement la commande appropriée.
Les méthodes de commande sont présentées dans un ordre progressif d’amélioration relative des performances.
A la fin, on trouve des indications bibliographiques permettant un approfondissement généralde la modélisation de la machine asynchrone, de l’électronique de puissanceet del’électronique de réglage et de commande.
J’espère que ce recueil sera apprécié par mes collègues et les étudiants et je serais trèsheureux de recevoir avec reconnaissance leurs remarques, critiques et suggestions.
Dr A. MeroufelE_mail : [email protected]

SOMMAIRE
Avant Propos
Introduction générale……….……………………………………………..…………......1
Chapitre 1 : Modélisation de la MAS
1.1Introduction………………………………………………………………………….……31.2Modélisation de l’actionneur asynchrone……………………….......………….…………31.3 Modélisation del’alimentation……………...……………………………..……….……141.4Stratégie de commande par MLI………………………...………………….…………….191.5 Résultats de simulation………………………..…………………………………………291.6 Conclusion…...……………………………………………………………..….………….34
Chapitre 2 : Commande scalaire de la MAS
2.1 Introduction …………………………………………………………………...………….352.2 Modélisation de la machine asynchrone en régime permanent ………………........…….36 2.3 Couple en régime permanent …………………………………………………………….382.4 Contrôle indirect du flux………………………………………………………….....…....402.5 Contrôle du flux à partir des tensions statoriques…………………………..…………….412.6Contrôle du flux à partir des tensions statoriques……………………………………..….442.7 Contrôle direct du flux……………………………………………………………………442.8 Régulateur deflux…………………………………………………...……………………452.9 Contrôle de la vitesse…………………………………………………………………….502.10 Simulation……………………………………………………………………………….512.11 Conclusion………………………………………………………...……………….……52
Chapitre 3 : Commande vectorielle de la MAS
3.1 Introduction………………………………………………………………………………533.2 Principe de la commande vectorielle……………………………………………………..533.3 Contrôle vectoriel direct etindirect………………………..……………..……………….573.4 Régulation, méthodes classiques………………………………………………………….593.5 Dimensionnement graphique des régulateurs sous Matlab/Simulink…………………….633.6 Principe du contrôle vectoriel indirect…...…………………………………….…………653.7 Commande vectorielle directe sans capteurs……...…………………………….………..663.8Schéma de simulation de la CVD sans capteurs………………………………………….75 3.9Simulation de la commande vectorielle indirecte……………………………………… ..763.10 Adaptation paramétrique……………………………………………………………...803.11 Interprétation des résultats……………………………………………………………803.12 Conclusion……………………………………………………………………….……80

Chapitre 4 : Commande directe du couple (DTC) de la MAS
4.1Introduction………………………………………………………….……………...……814.2Principes généraux sur la DTC……………………………………...……………………81 4.3Description de la structure du DTC……………………………………………..………..88 4.4 Amélioration de la commande DTC………………………………………………..……954.5Simulation……………………………………………………………………………….1024.6Interprétation des résultats………………………………………………………………1054.7Conclusion………………………………………………………………………………1064.8Stratégies de contrôle de type DTC…………………………………………………..…106
4.8.1 Commande DTC par MLI vectorielle discrétisée(DSVM_DTC)…...………1064.8.2 Commande DTC par MLI vectorielle (SVM–DTC)………….…..………112
4.9 Simulation nouvelles stratégies de DTC……………………………………………..…1144.10 Résultats de simulation ………………………………………………………….….1144.11Interprétation des résultats……………………………………………………………..1164.12 Conclusion………………………………………………….………………………….116
Bibliographie
Annexe

Introduction générale
Dr A. Meroufel 2008/20091
Introduction générale
La plupart des processus industriels font largement appel à des moteurs pour assurerl'entraînement. En fonction des applications, ces moteurs sont de divers types et lesperformances exigées sont largement variables. Par conséquent, ces moteurs doivent répondrede manière efficace à des variations de consignes (vitesse, position, couple) et cela, dans unelarge gamme de variations du point de fonctionnement. De ce fait, on doit avoir un accèsdirecte et immédiat au couple, afin de le contrôler de manière rapide et appropriée pour mieuxadapter le moteur aux exigences imposées. Le moteur à courant continu répond très bien à cesexigences. Cela s’explique par ledécouplage naturel entre le flux et le couple. Néanmoins, laprésence du collecteur limite la puissance et/ou la vitesse et exige une maintenance régulière.C’est pourquoi, de nos jours, on setourne de plus en plus vers les moteurs synchrones àaimants permanents et les moteurs à induction. La machine à induction est particulièrementrobuste et de faible coût, et cela conduit à devenir de plus en plus utile dans le domaineindustriel. Elle est utilisée dans les applications à base performance ainsi que dans des casplus sophistiqués.Sa commande est par contre plus difficile à réaliser que pour d'autres machines électriques.De nombreuses stratégies ont été développées pour en faire une machine qui dépasse lesautres, même dans les systèmes commandés. En général, la commande de la machineasynchrone se divise en deux classes.
• Commande de faible coût et faible performance (commande scalaire).La commande scalaire est la plus simple et la plus répandue dans la majorité des
applications industrielles. Le contrôle scalaire ne permet pas d’avoir une bonne précision dans la réponse de la vitesse et du couple suite à la simplicité de sa structure qui tient compteuniquement du régime permanent. Le flux statorique et le couple ne sont pas directementcommandés et les paramètres des machines alternatives doivent être correctement identifiés.La précision de la vitesse est faible et la réponse dynamique est lente.
• Commande à haute performance comme la commande vectorielle par orientation de fluxrotorique qui assure une dynamique élevée.
La commande vectorielle proposée par Hasse en 1969 et Blaschke en 1972 permet auxentraînements à courants alternatifs d’avoir un contrôle découplé du couple et du flux de la machine. Par conséquent la dynamique du couple peut être très rapide. Depuis, cette méthodeest à l’origine de plusieursréalisations industrielles dans les différents domaines comme larobotique, les machines outils, la traction électrique….Comme le modèle de la machine asynchrone correspond à un système multivariables, uncontrôle performant de la vitesse ou de la position de ce moteur et donc de son couple,demande le contrôle simultané de plusieurs variables. Par conséquent, il est nécessaire deréaliser artificiellement un découplage entre le flux et le couple. Parmi les différentesapproches développées en vue de réaliser ce découplage, la technique de contrôle vectoriel estcelle qui donne de meilleures performances. Pour avoir des réponses à dynamique élevée etun contrôle fin du couple, la machine doit être alimentée par des courants sinusoïdaux. Cecipeut être réalisé à l’aide d’un onduleur de tension contrôlé en courant, où on utilise les

Introduction générale
Dr A. Meroufel 2008/20092
techniques à hystérésis. Cependant, certaines de ces techniques délivrent des fréquences decommutation élevées et des dépassements de la bande à hystérésis. La commande vectorielleen tension contrôlée en courant permet d’avoir une dynamique proche de celle des entraînements à courant continu. L'installation d'un codeur incrémental pour mesurer lavitesse et/ou la position rotorique entraîne un surcoût qui peut être plus important que celui dela machine pour les faibles puissances. Il faut de plus prévoir une place supplémentaire pourl'installation du codeur. Chose qui n'est pas toujours souhaitable ou possible. La fiabilité dusystème diminue à cause de ce dispositif fragile qui requiert un soin particulier pour lui-mêmeet pour sa connectique. C'est à partir de cette constatation que l'idée d'éliminer le codeurincrémental est née et que les recherches sur la commande sans capteur de la machineasynchrone ont commencé. Plusieurs stratégies ont été proposées dans la littérature pouratteindre ce but. Une grande partie des méthodes proposées est basée sur des observateurs quidépendent du modèle de la machine asynchrone. Cependant, cette structure nécessite laconnaissance plus ou moins précise des paramètres de la machine. Ceci est à l’origine des études d’identification des paramètresqui sont des techniques très complexes.•La commande directe du couple (DTC: Direct Torque Control) proposée par Depenbrock etTakahashi est une solution pour les problèmes du contrôle vectoriel, cette stratégie decommande n’a pas besoinde capteur de position et la résistance statorique de la machine estle seul paramètre nécessaire pour l’estimation du flux et du couple.L’objectif du DTC est d’optimiser le contrôle des interrupteurs de l’onduleur pour assurer le découplage flux statorique –couple et ce même en régime de grandes variations. Son point faible est lesfluctuations au niveau du couple et du flux. Des travaux se sont multipliés sur cette DTC etont donné lieu à diverses évolutions de stratégies. Dans ce recueil, on propose deuxtechniques de DTC améliorées (DSVM_DTC : Discret Space Vector Modulation_DTC etSVM_DTC)

Modélisation de la machine asynchrone
Dr A. Meroufel 3 2008/2009
Modélisation de la machine asynchrone
1.1 IntroductionUn modèle est un outil mathématique qui permet de représenter ou de reproduire unsystème réel donné. L’intérêt d’un modèle est l’analyse et la prédiction du comportement en régime statique et dynamique du système physique. L’objectif de ce chapitre est de donner un aperçu sur la modélisation des machines asynchrones triphasées sous forme d’équations d’état en vue de leur commande en courant et en tension. Ensuite, nous rappelons brièvement lemodèle du convertisseur statique en présentant deux modes de commande approchée desinterrupteurs de l'onduleur et nous clôturons par des tests de simulation pour valider nosmodèles.
1.2Modélisation de l’actionneur asynchroneL’actionneur asynchrone est constitué de l’ensemble alimentation - onduleur - commande
rapprochée associé à une machine asynchrone. La machine asynchrone est caractérisée par sarobustesse et sa simplicité de construction, seulement elle présente un système d’équationstrès complexe à étudier. Il est donc nécessaire de développer un modèle plus simple. Lemodèle mathématique de la machine asynchrone est un système à six équations différentielles.La résolution d’un tel système est difficile même avec l’utilisation de l’outil informatique. L’utilisation de la transformation de PARK, sous certaines hypothèses simplificatrices,permet de contourner cette difficulté. Elle permet une représentation biphasée équivalente dela machine triphasée ce qui réduit considérablement la complexité du modèle en vue de lacommande. Toutes les grandeurs électromagnétiques sont ramenées sur un seul repère. Cerepère peut être fixe par rapport au stator ( , ) soit tournant (d,q). Le repère tournant
nécessite la présence d’une variable supplémentaire qui permet de définir sa position. Lareprésentation du modèle complet est mise sous forme d’équation d’état suivant le repère ( , ) ou (d,q) pour être facilement traitable par une méthode de résolution numérique.
1. 2.1 Hypothèses simplificatricesLes hypothèses simplificatrices admises dans le modèle de la machine asynchrone sontLa parfaite symétrie de la machineL’absence de saturation et de pertes dans le circuit magnétique.La répartition spatiale sinusoïdale des différents champs magnétiques le long de l’entreferL’équivalence du rotor en court circuit à un enroulement triphasé monté en étoile
1.2.2 Modèle de la machine asynchrone triphaséeLa machine asynchrone représentée par la figure1.1 se compose :-D’un circuit statorique fixe comportant trois phases identiques décalées entre elles de 120o
-D’un circuit rotorique mobile comportant trois phases identiques en court circuits décalées entre elles de 120o

Modélisation de la machine asynchrone
Dr A. Meroufel 4 2008/2009
1.2.3 Equations électriques de la machine asynchrone dans le repère triphaséLes équations régissant le fonctionnement électrique de la machine asynchrone (MAS)peuvent s’écrire
dtd
R
dtd
R
r
s
rr
sss
φI0
φIU
(1.1)
srr
rss
IIφ
IIφ
rsr
srs
ML
ML(1.2)
avec
Trrr
Tsss
Trrr
Tsss
Trrr
Tsss
IIIIII
VVVVVV
)()(
)()(
)()(
321321
321321
321321
rs
rs
s
φφ
II
0U
r
r
r
r
s
s
s
s
RR
R
RR
R
R
R00
00
00
;00
00
00
;
sss
sss
sss
s
lmmmlmmml
L ;
rrr
rrr
rrr
r
lmmmlmmml
L
cos)3
2cos()
32
cos(
)3
2cos(cos)
32
cos(
)3
2cos()
32
cos(cos
MMM rsT
sr
s1
s2s3
r1I
r2I
r3I
Fig 1.1 Représentation symbolique de la machineasynchrone
s1V
s3V
s2V

Modélisation de la machine asynchrone
Dr A. Meroufel 5 2008/2009
Où ls (lr) est l’inductance propre d'une phase statorique (rotorique), ms (mr) estl’inductance mutuelle entre deux phases statoriques (rotoriques) et M' est le maximum del'inductance mutuelle entre une phase statorique et une phase rotorique.
1.2.4 Transformation de ParkLa transformation de Park est une transformation du repère triphasé fixe par rapport au
stator dans un repère biphasé. Cette transformation permet de réduire la complexité dusystème. La position du repère peut être fixée par rapport aux trois référentiels :
- Champ tournant- Stator- Rotor
La transformation de Park est obtenue à partir d’une matrice unique (2x3) donnée par:
)34sin()32sin(sin)34cos()32cos(cos
kT (1.3)
Où k est une constante qui peut prendre la valeur 3/2 pour la transformation avec non
conservation de puissance ou la valeur 3/2 pour la transformation avec conservation depuissance.
Nous négligeons la composante homopolaire car nous considérons que le système estéquilibré. Le changement de variables relatif aux courants, aux tensions et aux flux est définipar la transformation
rousy
X
XX
X
X
y
yyq
d
3
2
1
)(T (s: stator , r: rotor) (1.4)
Xyq
d
XX
: peut être tension ou courant ou flux
La transformation inverse de Park a pour expression
)34sin()34cos(
)32sin()32cos(
sincos
)( 1
yy
yy
yy
yT (1.5)
D’où la transformation inverse des variables
yq
dy
y
X
X
X
XX
1
3
2
1
)(T (1.6)

Modélisation de la machine asynchrone
Dr A. Meroufel 6 2008/2009
La transformation de Park consiste à appliquer aux courants, tensions et flux unchangement de variables faisant intervenir l’angle entrel’axe des enroulements et l’axe du repère de Park (d,q)
Les équations (1.1) et (1.2) donnent alors lieu au système suivant
qs
ds
s
s
qs
ds
qs
ds
s
s
qs
ds
dtd
II
RR
VV
00
00
qs
ds
sr
sr
qr
dr
qr
dr
r
r
qr
dr
dtd
II
RR
VV
00
00
00
(1.7)
Avec
qr
qs
r
s
qr
qs
dr
ds
r
s
dr
ds
I
I
LM
ML
I
I
LM
ML
(1.8)
Où rssrrrrsss MMmlLmlL ;23
;; '
En notation complexe, le système d’équation (1.7) dans le référentiel du champ tournant s’écrit:
srrr
rsss
rrsrrrr
rsssss
IMIL
IMIL
)(jdtd
IRV0
jdtd
IRV
(1.9)
Où
qrdrrqsdssqsdssqsdss jjjIIIjVVV
dq
r1r
s1s
ssr
r
Fig I.2 Repères ( , )y , (d,q)
srrs
s

Modélisation de la machine asynchrone
Dr A. Meroufel 7 2008/2009
Les équations des tensions et des flux du modèle de la machine asynchrone dans unréférentiel fixe lié au stator sont :
srrr
rsss
rrrrrr
ssss
IMIL
IMIL
jdtd
IRV0
dtd
IRV
(1.10)
Il existe plusieurs choix de l’orientation du repère de Park qui dépendent des objectifs del’application voulue: Axes solidaires du champ tournant : Ce choix permet d’avoir une pulsation de glissement et s’adapte parfaitement à la commande vectorielle par orientation du flux rotorique. Axes liés au stator : c’est le repère naturel ou stationnaire de la machine asynchrone.
Ce choix permet de simplifier la transformation de Park en celle de Clark dans le cas de nonconservation de puissance ou celle de Concordia dans le cas contraire. C’est ce dernier choix qui est utilisé pour la conception de la commande directe du couple. Ces deux référentielssont les plus utilisés dans la commande de la machine asynchrone.
Le changement de repère triphasé → biphasé (a b c)→ ( ) peut être réalisé par la
transformation de Concordia :
c
b
a
XX
X
X
X
23230
21211
32
(1.11)
La transformation inverse est donnée par :
XX
XX
X
c
b
a
2321
2321
01
(1.12)
La transformation de Concordia ( ) peut également être obtenue à partir des
composantes de Park (d q) en faisant une rotation de l’angle s. Le passage des composantes
de Park à celles de Concordia se fait par :
q
d
ss
ss
X
X
cossin
sincosX
X
(1.13)
On définit également la transformation inverse :
X
X
cossin
sincosX
X
ss
ss
q
d (1.14)

Modélisation de la machine asynchrone
Dr A. Meroufel 8 2008/2009
Interprétation physique du modèle de ParkLe changement de variable peut être interprété comme une substitution aux enroulements
réels, d’enroulements fictifs )qs,ds( , )qr,dr( dont les axes magnétiques sont liés aux axes (d,q)
de Park.
1.2.5 Expression du couple Equation de la puissance:La puissance instantanée fournie aux enroulements statoriques etrotoriques s’écrit
rT
rsT
seP IUIU (1.15)
En appliquant la transformation de Park, elle s’exprime en fonction des grandeurs d’axes dq
)]()([23
])()[(23
][23
)()(
2222qrdrrqsdss
rqrdrdrqrsdsqsqsds
qrqr
drdr
qsqs
dsds
qr
drqrdr
qs
dsqsdse
IIRIIR
IIII
dt
dI
dtd
Idt
dI
dtd
II
IVV
I
IVVP
(1.16)
- Le premier crochet représente l’énergie magnétique emmagasinée dans le fer- Le deuxième crochet représente la puissance électromécanique Pem de la machine- Le troisième crochet représente les pertes joules
En tenant compte des équations des flux (1.2), la puissance électromécanique s’écrit donc
rdsqsqsdsrqrdrdrqrsdsqsqsdsem IIIIIIP )(23
)()[(23
(1.17)
La puissance Pem est aussi égale à pC re / .
L’expression scalaire du couple s'exprime par différentes expressions, de même type quels
que soient les axes choisis. Pour le couplet ),( rsI , le couple s'écrit:
s
1s
d
q
Fig I-3 Machine asynchrone vue dans le repère dq
dsV
qrIdrI
qsV

Modélisation de la machine asynchrone
Dr A. Meroufel 9 2008/2009
)(23
]Im[ *dsqrqsdr
rsr
re II
LM
pILM
pC (1.18)
*r : représente le conjugué du vecteur complexe r et ]Im[ : représente la partie
imaginaire de l’expression entre crochet.˄ : produit vectoriel
Equation mécaniqueL’équation mécanique est régie par l’équation suivante:
JfCCdt
drrre
r /)(
(1.19)
1.2.6 Représentation d’état du modèle de la machine La représentation d’état de la machine asynchrone dépend du repère choisi et du choix des variables d’état pourles équations électriques. Nous écrivons les équations dans le repère(d,q) car c’est la solution la plus générale et la plus complexe. Le choix des variables d’état dépend des objectifs soit pour la commande soit pour l’observation.
Nous donnons dans ce chapitre deux types de modèle de la machine asynchrone qui serontexploités dans les chapitres suivants pour la mise au point de nos lois de commande.
1.2.7 Modèle de la machine asynchrone alimentée en tensionPour une machine asynchrone triphasée alimentée en tension, les tensions statoriques
)V,V( qsds et la vitesse du champ tournant s sont considérées comme variables de commande,
le couple résistant Cr comme perturbation. Nous choisissons dans notre cas, le vecteur d’état suivant
)( qrdrqsdsTu II X (1.20)
Ce choix de variable se justifie d’une part, par le fait que les courants statoriques sont mesurables et d’autre part parce que l’on veut contrôler la norme du flux rotorique.
Pour mettre sous forme d’équation d’état, le modèle de la machine, nous devons modifier les équations d’état (1.7) en utilisant (1.8) pour les exprimer en fonction des variables du
vecteur d’état tuX . Après simplification et réarrangement du modèle, nous obtenons
UBXAX uuuu (1.21)
Avec

Modélisation de la machine asynchrone
Dr A. Meroufel 10 2008/2009
rrs
r
rsrr
r
ssrs
srr
ss
u
TTM
TTM
Tk
k
kTk
1)(0
)(1
0
A ;
0000
10
01
s
s
u L
L
B ;
qs
ds
V
VU
2
22
;;1;rs
r
s
s
rss
rsr
rr
LLMR
LR
LLM
kLL
MRL
T
Les équations (1-21) et (1-19) peuvent être mises sous un schéma fonctionnel Simulink àbase de blocs Fnc, intégrateur et Mux figure 1.4
Le schéma en bloc Simulink du moteur peut être réduit à un bloc où les entrées sont lestensions d’alimentation et la chargetandis que les sorties sont la vitesse et les courants
figure1.5.
Fig 1.4 Schéma de la MAS avec transformation abc/dq en modèle SIMULINK

Modélisation de la machine asynchrone
Dr A. Meroufel 11 2008/2009
1.2.8 Modèle de la machine asynchrone alimentée en courantPour une machine asynchrone triphasée alimentée en courant, la dynamique des courants
statosiques est négligeable devant la dynamique des flux rotoriques et le modèle de la
machine est défini par (1.22). Les courants statoriques )( qsds II et la vitesse de glissement
sr sont considérés comme variables de commande, le couple résistant Cr comme
perturbation. En considérant le vecteur d’état Tqrdr )( cX et après un réarrangement des
équations rotoriques (I.7), nous obtenons
IBXAX cccc (1.22)
Avec
rrs
rsr
TT
1)()(1
cA ;
r
r
TMTM
00
cB ;
qs
ds
I
II
A ces équations électriques, nous devons associer l’équation mécanique (1.19) pour obtenir le modèle complet en bloc Simulink figure 1.6 .
1.2.9 Test de simulation :Le but de cet essai est de valider notre bloc moteur comparativement aux
travaux cités en bibliographie. Notre objectif est de l’intégrer ultérieurement dans les simulations.
Fig1.5 Schéma bloc réduit de la MAS en modèle SIMULINK
Cr
Va
Vb
Vc
w
Idq
M A S
Fig 1.6 Modèle en bloc Simulink de la MAS alimentée en courant

Modélisation de la machine asynchrone
Dr A. Meroufel 12 2008/2009
Les réponses en boucle ouverte de la machine asynchrone avec variation de la charge sontdonnées par figure 1.7 et figure 1.8
Alimentation en tension triphasée de valeur efficace 220V
Le démarrage à vide et sous tension nominale permet un établissement rapide de la vitesseet un couple électromagnétique instantané. L'application d'une charge introduit une chute devitesse.
Alimentation en courant triphasé de valeur efficace 6A
Fig1.7 Réponses à un échelon de vitesse de la MAS alimentée entension avec variation de la charge
Fig 1.8 Réponses à un échelon de vitesse d’une MAS alimentée par une source de courant avec variation de la charge

Modélisation de la machine asynchrone
Dr A. Meroufel 13 2008/2009
Lorsque la charge est appliquée, le couple électromagnétique répond instantanément et lavitesse est légèrement perturbée. La commande en courant donne une réponse à fortdépassement pour le couple électromagnétique par conséquent il est déconseillé de l'utiliserdans un système à boucle ouverte pour des raisons de stabilité.
1.2.10 Contrôle des courants par hystérésisLa figure 1.9 montre le principe de contrôle des courants réels par un onduleur de tension.Cette commande est très adaptée pour les organes ayant une action à deux positions commec'est le cas ici, elle consiste à changer la polarisation de la tension de sortie de l'onduleur detelle sorte à maintenir le courant dans une bande centrée autour de la référence.
(b) Fig 1.9 (a) Contrôle des courants de type Hystérésis(b) signaux logiques et contrôle du courant
(a)
s
MAS
OND
RED
CfLf
3 ~
GT
abcV
dq
abc
qsI
dsI
-
-
-
*saI
*sbI
*scI
cba III
sav
sbv
scv
Banded’hystérésis
Courant deréférence
Courant réelaI
2/Vdc
t
2/Vdc
t
-
-
-*cI
*aI
*bI
cI
aI
bI
Signauxlogiques
aoU

Modélisation de la machine asynchrone
Dr A. Meroufel 14 2008/2009
Malgré sa simplicité demise en œuvre, sa robustesse et sa bonne dynamique cette commandeprésente certains inconvénients tels que le risque de dépassement de la fréquence decommutation maximale des semi conducteurs utilisés. Une alternative, est d’utiliser une structure hybride de commande appelée « hystérésis modulé ». Son principe de commande estexplicité sur la figure 1-10. La fréquence de commutation est imposée par la fréquence de laporteuse triangulaire. Quant à la largeur d’hystérésis, elle induit des propriétés derobustessesparamétriques à ce régulateur.
1.3 Modélisation de l’alimentation Le circuit de puissance des équipements industriels à vitesse variable est représenté
par la figure 1.11
Les caractéristiques exigées de l’actionneur électrique dépendent à la fois de la machine, deson alimentation et de la commande du convertisseur de fréquence.
Ces caractéristiques sont : Un couple avec le minimum d’ondulation possible, contrôlable par le plus petit
nombre de variable, en régime dynamique comme en régime permanent. Une large plage de variation de vitesse. Des constantes de temps électrique et mécanique faible. La source d’alimentation triphasée est supposée symétrique, de fréquence et d’amplitude de tension constante.
MAS
Commande del’onduleur
Sourcetriphaséee
Redresseur Filtre passe bas Onduleur de tension
Fig1.11 Schéma de principe de l’association convertisseur -machine
-*bI
bI-
Fig 1.10 Contrôle du courant de type Hystérésismodulée

Modélisation de la machine asynchrone
Dr A. Meroufel 15 2008/2009
1.3.1 Modélisation du redresseur triphasé à diodes :Le redresseur est un convertisseur « alternatif / contenu». Une conversion d’énergie
électrique permet de disposer d’une source de courant contenu à partir d’une source alternatif, il est représenté par la figure 1.12
Ce redresseur comporte trois diodes (D1, D2, D3) à cathode commune assurant l’alléedu courant Id et trois diodes (D4, D5, D6) à anode commune assurant le retour du courant Id .Si on suppose que le redresseur est alimenté par un réseau triphasé équilibré de tension :
)3
42sin()(
)3
22sin()(
)2sin()(
ftVtU
ftVtU
ftVtU
mb
mb
ma
(1.23)
Et si on néglige l’effet d’empiétement, la tension de sortie du redresseur sera définie comme suite :
)().().()().().()( tUtUtUMintUtUtUMaxtU cbacbared (1.24)
Cette tension est représentée par la figure 1.13
.
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04-400
-200
0
200
400
t(s)
Ua
Ub
Uc
U red
Fig 1.13 Représentation de la tension de sortie de redresseur
dI
aU
bU
cU
Fig 1.12 Représentation du redresseur triphasé à diodes
redU3D2D1D
6D5D4D

Modélisation de la machine asynchrone
Dr A. Meroufel 16 2008/2009
1.3.2 Modélisation du filtre :On utilise un filtre passe bas « LC », pour éliminer les hautes fréquences. Il permet
de réduire les ondulations de la tension et du courant redressés.Ce filtre est schématisé par la figure 1.14
Le modèle du filtre est défini par le système d’équations suivants :
(1.25)
La fonction de transfert du filtre est donnée par :
)1(1)( 2 sCLsF ff (1.26)
C’est un filtrede deuxième ordre avec une fréquence de coupure égale à :
ffc CLf 1 (1.27)
1.3.3 Modélisation du redresseur triphasé à diodes :L’onduleur de tension triphasé se compose de trois bras identiques
))()((1)(
)()(
tItICdt
tdU
tUdt
dILtU
sdf
dc
dcd
fd
dU dcUfC
fLdI sI
Fig 1.14 Représentation de filtre passe–bas.
MAS
Fig 1.15 Principe de l’alimentation par onduleur en tension
dcUfC

Modélisation de la machine asynchrone
Dr A. Meroufel 17 2008/2009
Chaque semi conducteur de puissance est représenté par un interrupteur parfait
Alors l’onduleur de tension peut être représenté dans le cas idéal par des interrupteurs
Les différents interrupteurs sont supposés parfaits, c'est-à-dire que les phénomènes dus à lacommutation sont négligés. Nous pouvons remplacer les bras de l’onduleur par un interrupteur à deux position modélisées par une fonction logique décrit l’état de chaque interrupteur, sa valeur vaut 1 sil’interrupteur est fermé, et 0 s’il est ouvert.
Cette fonction est définie par :
Si Ki1 est fermé et Ki0 est ouvert(1.28)
Si Ki1 est ouvert et Ki0 est fermé
Avec :i = 1, 2, 3.
Soit Fis, avec 3,2,1i et 1,0s la fonction de connexion d’un interrupteur Kis
associe au bras i de cet onduleur.Les relations entre ces différentes fonctions s’expriment par:
1
0Fi
Fig 1.16 Représentation d’un GTO
1K1kT 1kD
1kI
MAS
Fig 1.17 Schéma de l’onduleur.
dcUfC
1K 2K 3K
'1K '
2K '3K
sI

Modélisation de la machine asynchrone
Dr A. Meroufel 18 2008/2009
3031
2021
1011
11
1
FFFF
FF
(1.29)
Les potentiels des nœuds A, B, C de l’onduleur par apport au point N sont données par les relations suivantes :
EU
UFVUFV
UFV
dc
cBC
cBN
cAN
31
21
11
(1.30)
En utilisant les fonctions de connexions les tensions composées de l’onduleur sont exprimées comme suit :
dcANCNCA
dcCNBNBC
dcBNANAB
UFFVVVUFFVVV
UFFVVV
1131
3121
2111
(1.31)
Nous pouvons exprimer également les tensions simples à partir des tensions composéescomme suit :
3
3
3
BCACCCN
ABBCBBN
ACABAAN
UUVV
UUVV
UUVV
(1.32)
L’expression sous forme matricielle des tensionssimples de l’onduleur au moyen des fonctions logiques de connexions est obtenue à partir des équations :
dc
C
B
A
UFFF
VVV
31
21
11
211121112
31
(1.33)
aSF 11 bSF 21 cSF 31
Le courant d’entrée de l’onduleur peut s’écrire en fonction des courants de la charge par la relation :
(1.34)Avec :
00321
CBA VVViii
(1.35)
csbsass SiSiSii 321

Modélisation de la machine asynchrone
Dr A. Meroufel 19 2008/2009
Le modèle (1.33) peut être représenté par le schéma suivant:
1.3.4 Choix de structure des semi-conducteursLes semi-conducteurs les plus couramment utilisés pour réaliser les interrupteurs sont les
transistors de puissance (MOSFET, IGBT, Bipolaires) et les thyristors rapides(principalement les GTO) .
Les progrès technologiques accomplis dans le domaine des transistors de grandespuissances permettent maintenant de réaliser des onduleurs de forts courant et tension.L’expérience a montré que l’utilisation des transistors pour la commutation de grandes puissances est assez aisée. Cependant, pour un thyristor, un circuit auxiliaire peut engendrerdes conséquences néfastes, surtout s’il comporte lui-même un thyristor sur le circuit decommande : Faible vitesse de commutation, Pertes calorifiques élevées, Bruits acoustiques générés sur l’inductance de commutation, Encombrement.
Le transistor évite bien ces inconvénients, en plus de ses possibilités à fonctionner àfréquence de commutation élevée. Toutefois, pour les faibles et moyennes puissances, il estpréférable d'envisager une technologie à transistors plutôt qu’à thyristors malgré toutes les contraintes qui peuvent découler (fréquence de commutation, circuit d’aide à la commutation, tenue en tension, etc.…), moyennant quelques précautions; en l’occurrence, la surveillance des pertes en puissance dans les transistors aussi bien en conduction qu’en commutation et veiller à leurs bon refroidissement.
Tandis que pour les puissances supérieures, le thyristor GTO semble être mieux adapté, sinous prenons en considération certaines analogies vis-à-vis du transistor, qui se favorise, parrapport au thyristor classique, de l'élimination des circuits d’extinction forcée.
1.4 Stratégie de commande par MLIDeux méthodes de MLI seront développées dans ce paragraphe, MLI traingulo-sinusoidale
et MLI vectorielle
Fig 1.18 Modèle de l'onduleur triphasé

Modélisation de la machine asynchrone
Dr A. Meroufel 20 2008/2009
1.4.1- Modulation de Largeur d'Impulsions Sinus-triangleLa modulation triangulo-sinusoïdale est appelée également modulation de largeurd’impulsion intersective puisque son principe repose sur l’intersection d’une onde modulante basse fréquence, dite tension de référence, généralement sinusoïdale, avec une onde porteusehaute fréquence de forme, généralement, triangulaire, d’où l’appellation triangulo-sinusoïdale.Le résultat de la comparaison de ces deux signaux sert à commander l’ouverture et la fermeture des interrupteurs du circuit de puissance.
Deux paramètres caractérisent cette commande si la référence est sinusoïdale : L’indice de modulation m qui définit le rapport entre la fréquence fp de la porteuse et
la fréquence f de la référence : rp ffm
Le taux de modulation r (ou coefficient de réglage en tension ou encore rapportcyclique) qui donne le rapport de l’amplitude de la modulante Vr à la valeur crête Vp
de la porteuse: pr VVr .
Le schéma de principe est donné par la figure 1.19.
Fig1.19 Principe de la commande MLI- ST
La porteuse est un signal triangulaire caractérisé par sa fréquence pf et sa valeur de crête Vp.
On définit l’équation de la porteuse dans sa période [0, Tp] par :
Pp
pp
p
pp
TT
tTt
Vtx
Tt
Tt
Vtx
2si)43()(
2si)41()(
2
1 0
(1.36)

Modélisation de la machine asynchrone
Dr A. Meroufel 21 2008/2009
La référence est un signal sinusoïdal d’amplitude Vr et de fréquence fr. En triphasé, les troistensions sinusoïdales de référence sont données par :
322sin322sin
2sin
tfVvtfVv
tfVv
rrrc
rrrb
rrra
(1.37)
La commande MLI sinus triangle utilise la comparaison avec la porteuse des trois
composantes de la tension de référence afin de calculer les états aS , bS et cS des
interrupteurs de l’onduleur. Ceux ci sont donnés par l’équation 1.36 suivante :
0)t(xvsi0
0)t(xvsi1S
rabc
rabcabc (1.38)
1.4.2- Simulation de la commande MLI sinus–triangle :La figure 1.20 représente le modèle Simulink de la commande MLI sinus triangle et la
figure 1.21 montre la simulation de l'état aS et la tension de sortie van pour r = 0.8 et m = 6
et 18 quand les tensions d’entrées sont triphasées sinusoïdales de fréquence 50 Hz etd’amplitude 220 V. La simulation montre que l’augmentation de l’indice de modulation rejette les harmoniques de la tension de sortie de l’onduleur vers des fréquences de rangssupérieurs. Ceci diminue d’une part l’effet de ces harmoniques sur les performances de lamachine asynchrone et facilite d’autre part leur filtrage. On remarque néanmoins quel’augmentation de l’indice de modulation augmente le nombre de commutations par période, qui est égale à m2 , et ainsi augmente les pertes de commutation par période. Elle diminueaussi le cycle minimum d’ouverture –fermeture des interrupteurs qui est de 3.44 ms pour
6m et 1.05 ms pour 18m . Le choix de l’indice de modulation utilisé dans la commande MLI sinus –triangle dépend aussi du type d’interrupteurs utilisés dans la conception de l’onduleur. L’indice de modulation 18m convient parfaitement aux IGBT se trouvant sur lemarché.
Fig 1.20 Modèle Simulink de la commande MLI - ST

Modélisation de la machine asynchrone
Dr A. Meroufel 22 2008/2009
1.4.3 Principe de la commande MLI Vectorielle :La modulation de largeur d’impulsion vectorielle utilise un algorithme numérique afin
d’obtenir une séquence de commande des interrupteurs de l’onduleur permettant de générer un vecteur tension de sortie qui s’approche le mieux possible du vecteur tension de référence. Cette technique de MLI suit les principes suivants :
Echantillonnage du signal de référence à intervalles réguliers T appelé période demodulation.
Réalisation dans chaque période de modulation,d’une impulsion de largeur T centréesur la période, et dont la valeur moyenne est égale à la valeur de la tension deréférence au milieu de la période de modulation (MLI symétrique).
Uniformisation des états de tous lesinterrupteurs d’un même demi –pont au centre etaux deux extrémités de la période.
Cette modulation est conduite en synchronisme sur les trois phases. Les trois tensionssinusoïdales désirées à la sortie sont représentées par un seul vecteur appelé vecteur tensionde référence. On approxime au mieux ce vecteur pendant chaque intervalle de modulation enagissant sur la commande des trois jeux d’interrupteurs complémentaires K1 et K1’, K2 et K2’, K3 et K3’ représentés par la figure 1.22.
v an
m = 18 , r = 0.8
v an
Fig1.21 Simulation de la commande MLI -ST pour r = 0.8 et m = 6 et 18
m = 6 , r = 0.8v a
,b,c
etx(
t)
v a,b
,cet
x(t)
va vb vc
Sa Sa

Modélisation de la machine asynchrone
Dr A. Meroufel 23 2008/2009
VsβVsα
Tableau 1.1 Calcul des vecteurs de tensions
Le tableau 1.1 indique les huit états que peuvent prendre les interrupteurs du pont triphaséà six interrupteurs. Ce tableau indique pour chacun de ces huit états, les vecteurs des tensions
aV , bV , cV la valeur de leur composantes de Concordia sV , sV ainsi que le vecteur de
référence sV
représentatif de ces états. Deux de ces vecteurs 0V
et 7V
sont identiquement
nuls. Les six autres ont le même module égale à 32E et dcUE .
Une analyse combinatoire de tous les états possibles des interrupteurs constituants le
convertisseur donne huit ( 32 ) combinaisons possibles dont six états actifs non nuls et deuxrestants des états de commutation nuls figure1.23.
Fig1.22 Schéma simplifié de l’onduleur triphasé deux niveaux

Modélisation de la machine asynchrone
Dr A. Meroufel 24 2008/2009
Les vecteurs tensions sont représentés par la relation suivante
7,00
6,....,132 3)1(
i
ieUVij
dci
(1.39)
Les extrémités de ces six vecteurs définissant les sommets d’un hexagone régulier puisque
deux vecteurs successifs font entre eux un angle de 3 , figure 1.24. Chacun des couples de
vecteurs iV
et 1iV(i=1..6) définissent les limites d’un des six secteur de l’hexagone (à noter
que dans le secteur 6 la notation 1iV
correspond au vecteur 1V
).
. aV
bV
cV
)000(0V
bV
aV
cV
)110(2V
.
bV
aV
cV)101(6V
.
bV
aV
cV
)100(1V
.bV
aV
cV
)010(3V
.bV
aV
cV )001(5V.
bV
. aV
cV
)111(6V
bV
aV
cV
)011(4V
.
Fig 1.23 Différentes topologies de l’onduleur et vecteur tension iV
Fig1.24 Représentation du polygone de commutation

Modélisation de la machine asynchrone
Dr A. Meroufel 25 2008/2009
Fig1.25 Algorithme de détection des secteurs
1.4.4 Vecteur tension de référence :
On peut définir un vecteur sV
dont les cordonnées sont les composantes de Concordia
sV , sV du système triphasé de tensions saV , sbV , scV qu’on désire obtenir en sortie. Si :
)34cos(2)32cos(2
cos2
tUrVtUrV
tUrV
dcsc
dcsb
dcsa
(1.40)
La transformation de Concordia donne :
tUrVtUrV
dcs
dcs
sin2.23cos2.23
(1.41)
Le vecteur sVest un vecteur d’amplitude égale à 2.23 dcUr , tournant dans le sens
trigonométrique avec une vitesse angulaire égale à la pulsation des tensions désirées. A
chaque instant, le vecteur sV
peut être exprimé comme une combinaison linéaire des deux
vecteurs iV
et 1iV
)6..1i( qui lui sont adjacents. De ce fait une approximation de sV
peut
être générée en utilisant une combinaison dans un temps très bref de deux des états des
interrupteurs correspondants aux vecteurs iV
et 1iV
. Pour déterminer le secteur ' i ' on
applique l'algorithme suivant.

Modélisation de la machine asynchrone
Dr A. Meroufel 26 2008/2009
D'une manière générale le vecteur tension de contrôle refV
est approché sur la période de
modulationT, par la génération d’un vecteur de tension moyen moyenV
élaboré par application
des vecteurs d’état de l’onduleur iV
et 1iV
adjacents et des vecteurs nuls 0V
et 7V
dtVdtVdtVdtV
jVVeU
rV
T
TTT
TTT
TTK
TT
Ti
T
o
ssjdc
moyen
ii
ii
i
i
2/
2/7
2/
2/1
2/
2/
2
0 1
1
223
(1.42)
2/10 TTTT ii (1.43)
La décomposition de (1.42) sur les deux axes du plan , est la suivante
1
1
3sin
31
sin
3cos
31
cos
32
3sin
3cos
31
sin
31
cos.
32
2
i
idc
iidcs
s
TT
ii
ii
U
i
i
Ti
i
TUVVT
(1.44)
La résolution de cette dernière équation aboutit à
s
s
dci
i
V
V
iiii
UT
TT
3)1(cos3)1(sin3cos3sin
22
1
(1.45)
iT : Intervalle de temps alloué au vecteur iV
1iT : Intervalle de temps alloué au vecteur 1iV
0T : Temps alloué aux deux vecteurs 70 VetV
Le schéma suivant résume la méthode de calcul de la MLI vectorielle.
Equ
atio
ns(1
.40,
1.41
)
Déterminationdu secteur
Séqu
ence
sEquations(145,143)
sV
sV
Fig1.26 Schéma de principe de la modulation vectorielle
sVsV
)6,....2,1iS i
sf
scV
sbV
saV
0T
iT
cS
bSaS
1iT

Modélisation de la machine asynchrone
Dr A. Meroufel 27 2008/2009
L’ordre dans lequel on fait succéder des configurations correspondants aux vecteurs iV
et
1iV
et du vecteur 0V
ou 7V
durant la période de modulation est choisi de manière à ce que
d’une part, tous les interrupteurs d’un même demi –pont aient un état identique au centre etaux deux extrémités de la période, et d’autre part, l’état des interrupteurs soient symétriques par rapport au milieu de la période de modulation, figure 1.27.
Dans ce qui suit nous allons faire le calcul des temps de commutation des interrupteursdans chacun des six secteurs de l’hexagone. Nous allons nous limiter à l’étude de la commande des interrupteurs et au tracé des formes d’ondes quand l’indice de modulation est égale à 6i. D’après la figure 1.28 on a:
sss VjVV
(1.46)
avec
Fig1.28 Calcul des temps de commutation T1 et T2 du premier secteur
Fig.1.27 Etats des interrupteurs aS , bS et cS dans le premier secteur de l’hexagone

Modélisation de la machine asynchrone
Dr A. Meroufel 28 2008/2009
sincos
ss
ss
VVVV
(1.47)
On a aussi
EVV32
21 (1.48)
D’un autre coté la valeur de A de la figure 1.28 peut être calculée de deux manières :
)3/sin()6/cos(11
sVT
VTA (1.49)
d'où
E2
T2)3/sin(V
)6/cos(VT)3/sin(V
T s1
s1
(1.50)
Qui peut s’écrire sous la forme:
ET
VV
ET
VT
ss
s
22
21
23
22
)sin)3/cos(cos)3/(sin(1
(1.51)
d’où
TE
VVT ss
2
261
(1.52)
D’un autre coté la figure 1.28 nous donne :
T/VT
V)/cos( s
22
6
(1.53)
d’où
2/3E3/2T
V)6/cos(V
TVT s
2s2
(1.54)
Qui peut s’écrire sous la forme:
TE
V2T s
2
(1.55)
En effectuant un calcul similaire pour chaque secteur, le temps de commutation desinterrupteurs dans chacun des six secteurs de l’hexagone peut être obtenu. Le tableau 1.2donne la valeur de ces temps ainsi que l’ordre de succession des configurations
correspondants aux vecteurs iV
et 1iV
et du vecteur 0V
ou 7V
durant la période de
modulation.

Modélisation de la machine asynchrone
Dr A. Meroufel 29 2008/2009
1.5 Simulation de la commande MLI vectorielle :1.5.1 Modèle de simulation
La figure 1.29 représente le modèle Simulink de la commande MLI vectorielle où lafonction Matlab utilisée est la fonction « svm.m » donnée en annexe et qui calcule les états des
Tableau 1.2. Description des séquences de conduction des interrupteurs

Modélisation de la machine asynchrone
Dr A. Meroufel 30 2008/2009
interrupteurs de l’onduleur aS , bS et cS en utilisant les composants triphasés de la tension
de référence sV
, la valeur de la tension continue Eet l’indice de modulation p.
La figure 1.30 montre la simulation de l'état aS et la tension de sortie van , quand les
tensions d’entrées sont triphasées sinusoïdales de fréquence 50 Hzet d’amplitude 2/Er .Comme dans la modulation sinus–triangle, la simulation montre que l’augmentation de
l’indice de modulation a l’avantage de rejeter les harmoniques de la tension de sortie de l’onduleur vers des rangs supérieurs mais a le désavantage d’augmenter la perte de commutation par période et de diminuer le cycle minimum d’ouverture fermeturedesinterrupteurs qui est de 2.6 ms pour 6p et 0.8 ms pour 18p . Il apparaît d’après cette
simulation que la MLI vectorielle nécessite de meilleurs interrupteurs que la MLI sinustriangle pour le même indice de modulation.
1.5.2 Evaluation des performancesPour la détermination des performances de l’onduleur et de la qualité du signal de sortie, il
est nécessaire de citer quelques paramètres. Parmi ceux-là, le facteur de distorsionharmonique totale THD.
2/1
...3,2
2''1
1
nnU
UTHD (1-56)
Fig1.29. Modèle Matlab/Simulink de la commande MLI vectorielle
Sav a
n
p = 18 , r = 0.8
Sav a
n
Fig. 1.30 Simulation de la commande MLI vectorielle pour r = 0.8 et p = 6 et 18
p = 6 , r = 0.8

Modélisation de la machine asynchrone
Dr A. Meroufel 31 2008/2009
Où2 '2
1'21
effU UTHD
U
(1.57)
AvecU1’: valeur efficace du fondamental de la tension
Un’: valeur efficace de la tension harmonique de rang n (nième tension harmonique)
Ueff : valeur efficace de la tension de sortie
1.5.3 Résultats de simulationLes blocs de simulation utilisés pour les deux types d'onduleur sont représentés par les
figures 1.31 et 1.32.
t
m
f re
r
Onduleur
MLI
charge
tsourcecontinue
Va
Vb
Vc
Cr
MAS
Fig1.32 schéma de simulation d’une MAS alimentée par un onduleur de tension à MLI vectorielle
Fig1.31 Bloc de simulation de la MAS alimentée par un onduleur à MLI-ST

Modélisation de la machine asynchrone
Dr A. Meroufel 32 2008/2009
Réponses de l'association MAS-onduleur à MLI-ST
Fig 1.33 Réponses à un échelon de vitesse avec application d’une charge entre [1.5, 2.5] d’une MAS alimentée par un onduleur de tension à MLI (traingulo-sinusoidale [m=35, r=0.9])
0 1 2 3 40
50
100
150
t [Sec]
vite
sse
[rd/
Sec
]
0 1 2 3 4-0.5
0
0.5
1
t [Sec]
flux
[Wb]
0 1 2 3 4
0
10
20
30
t [Sec]
coup
leC
em[N
.m]
0 1 2 3 4
-20
-10
0
10
20
t [Sec]
cour
ants
tato
rique
[A]
flux-dr
flux-qr
0 0.02 0.04 0.06 0.08-400
-200
0
200
400
t [Sec]
0 5 10 15 20 25 30 35 40 45 500
50
100
Rang d'ahrmonique
Fondamental (50Hz) = 250.4 , THD= 60.42%
ampl
itude
sde
sha
rmon
ique
s[V
olts
]
tension de ligne (V)

Modélisation de la machine asynchrone
Dr A. Meroufel 33 2008/2009
Réponses de l'association MAS-onduleur à MLI-Vectorielle
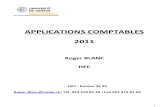
Fig 1.34 Réponses àun échelon de vitesse avec application d’une charge entre [1.5, 2.5] d’une MAS alimentée par un onduleur de tension à MLI vectorielle [m=35, r=0.9])
0 1 2 3 40
50
100
150
t [Sec]
vite
sse
[rd/
Sec
]
0 1 2 3 4-0.5
0
0.5
1
t [Sec]
flux
[Wb]
0 1 2 3 4
0
10
20
30
40
50
t [Sec]
coup
leC
em[N
.m]
0 1 2 3 4
-20
0
20
t [Sec]
cour
ants
tato
rique
[A]
flux-qr
flux-dr
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08-400
-200
0
200
400
t [Sec]
0 5 10 15 20 25 30 35 40 45 500
50
100
Rang d'ahrmonique
Fondamental (50Hz) = 288.3 , THD= 38.56%
ampl
itude
sde
sha
rmon
ique
s[V
olts
]
tension de ligne (V)

Modélisation de la machine asynchrone
Dr A. Meroufel 34 2008/2009
Lors du pilotage par MLI vectorielle le THD est 38.56%. Par contre, en commande MLISinus-triangle le THD est 60.42%. D’autre part, le couple présente moins d’ondulation en MLI vectorielle.
Ceci montre que la MLI vectorielle peut apporter une amélioration appréciable dans latension de sortie. Elle peut permettre l’alimentation de la machine asynchrone avec une plusgrande tension et avec moins de distorsion harmonique que la MLI sinus–triangle.
1.6 ConclusionDans ce chapitre on a procédé à la modélisation de l'onduleur de tension et ses
techniques de commande puis on a fait une simulation des performances du système MAS-Onduleur en utilisant les commandes MLI sinus triangle et vectorielle.D’après les résultats desimulation obtenus, on peut conclure qu’en comparaison avec la commande MLI sinus-triangle, la commande d’un onduleur par une MLI vectorielle apporte une améliorationperceptible dans la tension de sortie de l’onduleur et une amélioration appréciable dans laperformance du moteur qu’elle alimente. Cette partie est nécessaire pour la commande de lamachine asynchrone.

Commande scalaire de la machine asynchrone
Dr A. Meroufel 35 2008/2009
Commande scalaire de la machine asynchrone
2.1 IntroductionLe but de ce chapitre est de montrer comment la machine asynchrone peut être utilisée dansdes applications d’entraînements réglés. La commande scalaire est relativement simple. Elleest basée sur le modèle en régime permanent sinusoïdal. Elle permet d’atteindre desperformances remarquables en pratique. Il existe plusieurs commandes scalaires selon qu’on agit sur le courant ou la tension. Elles dépendent surtout de la topologie de l’actionneurutilisé(onduleur de tension ou de courant). L’onduleur de tension est le plus utilisé en petite et moyenne puissance. La commande la plus utilisée est la loi U/F.L’alimentation à fréquence variable se fait à l’aide d’un convertisseur statique généralementcontinu –alternatif. La source d’entrée peut être de type source de courant ou de type source de tension. En sortie du convertisseur on contrôle :
- soit l’amplitude des tensions ou des courants ainsi que leur fréquence.
- Soit une commande avec autopilotage qui asservit la fréquence statorique sf et latension sV ou le courant sI en réalisant slrs à l’aide d’un capteur mécanique de vitesse.
Le contrôle de la vitesse du rotor exige celui du couple et par conséquent celui du flux statoret de s . Ces grandeurs ne sont malheureusement pas facilement mesurables. De plus lamesure de la vitesse r nécessite une grande précision pour son addition à sl qui est trèsfaible, si on ne veut pas introduire une forte erreur sur la détermination de s . Il est alors
Fig 2.1 Principe du réglage
MAS
AC
DC
sf
sV
sI
U I
slrs
U
sI
GT
s
r
I
sV
+sl
+
s
rd
sd
ssq
ssl
r
Fig 2.2 Réglage avec autopilotage
OND MAS

Commande scalaire de la machine asynchrone
Dr A. Meroufel 36 2008/2009
préférable de les estimer à l’aide d’observateurs. Cet autopilotage peut être associéindifféremment à une alimentation en courant ou en tension.Il existe une grande diversité, non seulement de montages des convertisseurs de fréquenceutilisés, mais aussi de circuits de réglage et de commande. Une normalisation ne se dessinepas encore.
2.2 Modélisation de la machine asynchrone en régime permanentPour mettre en évidence les principes généraux de réglage du couple électromagnétique de lamachine asynchrone, nous allons adopter le modèle du régime permanent sinusoïdal enutilisant la notation de vecteur complexe. Le contrôle de vitesse le plus simple, dit ‘U sur F’, permet de varier la vitesse de la machine sur une large plage. Les équations qui permettent decalculer le couple et de prévoir les points de fonctionnement sont basées sur le modèle‘régime permanent’ de la machine.Pour la mise en équations du modèle de la machine, nous supposons les hypothèses duchapitre1
2.2.1 Modèle de la machine asynchrone en régime permanentSi les tensions d’alimentation sont triphasées et équilibrées, on peut écrire
)3/4cos()3/2cos(
cos
tUVtUV
tUV
sscs
ssbs
ssas
(2.1)
La vitesse mécanique est constanteOn définit le glissement g comme le rapport des pulsations rotoriques et statoriques
srg / . Les différentes pulsations sont reliées par la relation d'autopilotage psls
Choisissons de fixer le repère ‘dq’ au champ tournant
)sin()cos(
sssqs
sssds
tUVtUV→
0qs
sds
VUV
(2.2)
En utilisant la notation complexe qd jXXX , les grandeurs électriques peuvent se mettresous la forme :
)()()( dsqssqsdsqsdssqsdss jjdtd
jIIRjVVV (2.3)
D’où
ssssss jdtd
IRV
En régime permanent
sr
rrrrr
sssss
gjIRV
jIRV
(2.4)
Où

Commande scalaire de la machine asynchrone
Dr A. Meroufel 37 2008/2009
srrr
rsss
IMIL
IMIL
(2.5)
Finalement les grandeurs électriques s’écrivent
ssrrsrr
rsssssss
IMjILjIgR
IMjILjIRV
0(2.6)
2.2.2 Schéma électrique équivalentLes équations (2.6) peuvent être représentées par le schéma électrique équivalent suivant :
Le schéma avec circuits couplés est peu utilisé, on lui préfère des schémas faisant intervenirles inductances de fuites.
2.2.3 Schéma ramené au stator avec inductance de fuite localisée au rotorOn peut ramener le schéma de la figure 2.3 au stator avec les fuites magnétiques totalisées aurotor ( rrN ), pour cela on pose
srrr L
MLLN ;
sLM
m (rapport de transformation)
- Composantes ramenées au stator
r'r
2r'
r
2r'
r
ImIm
RR
m
NN
(2.7)
Alors, en partant des équations (2.6), on peut écrire
Fig.2.3 Schéma équivalent en régime permanent
sV
rI
sL g/R r
sI sR
rL
M

Commande scalaire de la machine asynchrone
Dr A. Meroufel 38 2008/2009
)(0
)()()(0
)()(0
)(
'''''
'22
''
''
rsssrrsrr
rsssrssrs
srsr
s
sr
rrsssrs
rsrsrs
ssrrsrr
rsssssrsssssss
IILjINjIgR
IILjILjILM
ML
LjILM
ML
gR
IIILjIML
LjIML
gR
mL
IMjILjIgR
IILjIRIMjILjIRV
(2.8)
On obtient donc les équations du schéma équivalent ramené au stator avec inductance defuites localisées au rotor figure 2.4
2.3 Couple en régime permanentL’expression du couple en régime permanent peut être déterminée
- soit à partir de l’expression du couple électromagnétique )(43 *
ssme IpC
- soit à partir d’un bilan de puissance
Puissance transmise au rotorOn suppose les pertes joules statoriques négligeables (lorsque le moteur tourne, lavaleur de 'g' est suffisamment faible pour que sR soit négligeable). La puissancetransmise au rotor est
2''
3 rr
Tr IgR
P avec2'2
'
'
)()( srr
sr
NgR
VI
(courant magnétisant négligeable) (2.9)
Pertes joules au rotor
Trrrjr gPIRP 2''3 (2.10)
Puissance électromagnétique)1( gPPPP TrjrTre (2.11)
Couple électromagnétique
Fig 2.4 Schéma équivalent ramené au stator avec fuitesmagnétiques localisées au rotor
sI
sV
'rIsrN '
gRr /'
sR

Commande scalaire de la machine asynchrone
Dr A. Meroufel 39 2008/2009
2'2'
'2
)()(
/3
srr
r
s
see
NgR
gRVp
PC
(2.12)
La tension et le flux statorique sont liés par la relation sss jV . Ainsi le coupleélectromagnétique peut s’exprimer par:
- en fonction du flux statorique
2'2'
'2
)(3
rrr
rrse
NR
RpC
(2.13)
- en fonction du flux rotorique
r
rre RpC 23 (2.14)
Il en résulte des deux expressions du couple électromagnétique que les grandeurs de réglagesont :
la pulsation rotorique r le flux statorique sou le flux rotorique r
Maintenant, il reste à résoudre deux problèmes- Comment imposer la pulsation rotorique sachant qu’en règle générale le rotor est
inaccessible ?Pour cela on utilise la relation d’autopilotage pssl
s : grandeur imposable , : grandeur mesurable- Comment imposer les flux sou r et à quelle valeur ?
Le domaine de fonctionnement de la machine dans le plan couple/vitesse est indiqué sur lafigure2.5
En fait, garder le rapport constant U/F revient à garder le flux constant. Quand la tensionatteint sa valeur maximale, on commence à décroître ce rapport ce qui provoque une
Fig 2.5 Caractéristique couple vitesse
tetanConsf/V
Compensation despertes statoriques
Vitessen
eC
sV
tetanConsPuissance
s
oV

Commande scalaire de la machine asynchrone
Dr A. Meroufel 40 2008/2009
diminution du couple que peut produire la machine. On est en régime de defluxage ou régimede survitesse.A basse vitesse la chute de tension ohmique ne peut pas être négligée. On compense alors enajoutant un terme de tension oV .
2.4 Contrôle indirect du fluxLes flux seront contrôlés en boucle ouverte à partir des grandeurs électriques statoriquescourants ou tensions.Les stratégies de commande couramment utilisées seront :
D’une vitesse nulle à une vitesse nominale, on maintiendra le flux constant à sa valeur maximale pour minimiser les pertes. Pour cette plage de fonctionnement, on disposeradu couple nominal de la machine
Pour les vitesses supérieures à la vitesse nominale, on diminuera le flux dans lamachine. Pour cette plage de fonctionnement on disposera de la puissance apparentenominale de la machine.
Ainsi, on déduit le synoptique d’une commande en couplefigure2.7.
Fig2.6 caractéristique V/f
oV
s
sV
MAS
Loide commande Onduleur
deTension
ouCourant
GT
ref
s
sr ou **ss VouI
++
Fig2.7 Schéma de principe de contrôle en couple de la MAS

Commande scalaire de la machine asynchrone
Dr A. Meroufel 41 2008/2009
2.5 Contrôle du flux à partir des courants statoriquesEn régime permanent et dans un repère lié au rotor, l'équation du circuit rotorique s'écrit :
srrrrrr IMjILjIR 0 (2.14)Où r est la pulsation des courants rotoriques.
Le flux statorique est donné par ses composantes dans les axes d et q du repère précédent :
rsss IMIL (216)
A partir des équations ci-dessus, on en déduit :
s
rrr
rr I
jLRjM
I
(2.17)
et
s
rrr
rrrss I
jLRjLR
L
(218)
D'où l'expression du flux en fonction du module du courant statorique :
2
2
1
1
r
rr
r
rr
s
ss
RL
RL
LI
(2.19)
En régime permanent et dans un repère lié au stator :
rsssssss IMjILjIRV (2.20)
D’où:
ssrrs
rs
rr
r
ss I
RRLL
RL
j
RV
1
1(2.21)
En reportant (2.19) dans (2.21), la tension statorique doit suivre la loi suivante
2
22
*
1
1
r
rr
ss
sr
r
rsr
rs
rs
s
sss
RL
RL
RL
RRLL
LR
V
(2.22)
Cette relation reste valable entre les valeurs efficaces des tensions et flux statoriques. Elleconstitue le principe des lois de commande à flux constant des machines alimentées entension. On choisit de maintenir, si possible, le flux à sa valeur nominale.Compte tenu des dispositifs utilisés, deux modes de commande sont possibles
• une commande par contrôle de la fréquence statorique S et du courant ou de latension statorique,

Commande scalaire de la machine asynchrone
Dr A. Meroufel 42 2008/2009
• une commande avec autopilotage et contrôle de la pulsation des courants rotoriques r .Mais, des considérations de stabilité et l'application des lois précédentes montrent nettementl'avantage de la deuxième approche.
A partir de l'équation (2.19) , on définit le module du courant statorique par la relationsuivante :
r
rr
rr
rr
s
ss R
LavecL
I
2
2
)(1)(1
(2.22)
Les caractéristiques )( rsI à flux s constant sont indiquées sur la figure 2.8
Pour le contrôle de ce courant on utilise Un commutateur de courant Un onduleur de tension piloté en courants
La commande élabore trois courants de consigne : D’amplitude permettant de maintenir le module du flux constant De pulsation s Les fonctions de connexion des interrupteurs constituant l’onduleur sont élaborées à partir d’une commande en fourchette de courant selon le schéma suivant
L’amplitude du courant sI dans le cas du commutateur de courant peut être contrôlé soitdu coté alternatif ou après redressement du courant figure2.10
1s12 ss
sI
r
Fig2.8 sI en fonction de r à flux statorique
+
-
ref)3/2sin( x
xsin
)4/2sin( x
IntégrateurModulo 2
s
sI
r-
-
asI
bsI
csI3S
2S
1S
+
amI
bmI
cmI
Fig2.9 Schéma de commande

Commande scalaire de la machine asynchrone
Dr A. Meroufel 43 2008/2009
2.5.1 Principe de commande du commutateur de courant
2.5.2 Principe de commande de l’onduleur de tension contrôlé en courantL'amplitude du courant et la fréquence sont imposées par l'onduleur
Fig2.10 Commande scalaire avec onduleur de courant
MAS
OND
RED
PI
Lf
PI
GT
-
-
+ ++
Isc
Id
r
ref s
3 ~
sl
MA
ON
RED
Cf
Lf
PI
GT
-
-+ ++
Is *abcI
refs
3 ~
r
Générateurde
courantsabcI
Fig 2.11 Commande scalaire avec onduleur de tension régulé en courant

Commande scalaire de la machine asynchrone
Dr A. Meroufel 44 2008/2009
2.6 Contrôle du flux à partir des tensions statoriquesLa tension statorique (2.22)s’exprime en fonction du flux statorique par la relation suivante:
2
22
)(1)/1()/(
rr
sssrrrrssssss
LRLRV
(2.23)
A partir de cette relation on fixe l’amplitude de la tension de commande puis on reconstitue lesystème alternatif triphasé pour la technique MLI figure2.12.
En pratique, on se contente le plus souvent d’une loi de commande simplifiée correspondant à 0sR soit sssV . Pour améliorer les performances en basse vitesse, on majore la tension
sV d’une quantité proportionnelle à sI . Ceci peut être représenté par le bloc de linéarisationde la tension dans le schéma bloc de la figure 2.13
2.7 Contrôle direct du fluxPour améliorer les performances, on régule le flux pour l’imposer aussi en régime dynamique et obtenir un comportement acceptable. On doit donc estimer le flux. Une des plus simples
PI
-+ +
+
sV
refsr
MAS
OND
RED
CfLf
3 ~
oV
GT
abcV
Fig 2.13 Commande scalaire en tension
-
+ref
)3/2sin( x
xsin
)4/2sin( x
IntégrateurModulo 2
s
sV
r-
-
asV
bsV
csV3S
2S
1S
Loide commande
s
Fig 2.12Génération des signaux de commande de l’onduleur
r

Commande scalaire de la machine asynchrone
Dr A. Meroufel 45 2008/2009
solutions consiste à maintenir deux courants et deux tensions statoriques dans le repère lié austator , le flux s’écrit
sss j (2.24)
Avec
dtIRV
dtIRV
ssss
ssss
)(
)(
On calcule les tensions et les courants en utilisant la transformation de Concordia
sss jVVV (2.25)
)(2
1
)](21
[32
32
321
SSUV
SSSUV
cs
cs
)3,2,1( iS i : signaux logiques
sss jIII (2.26)
)(2
132
csbss
ass
III
II
Ainsi lemodule du flux statorique et le couple s’écrivent22sss
)( sssse IIpC (2.27)
On peut également estimer le flux rotorique
22
)(
)(
rrr
sssr
r
sssr
r
ILML
ILML
(2.28)
2.8 Régulation du fluxUne variation des paramètres de la machine en cours de fonctionnement provoque une dérivedu flux. Une augmentation du flux peut entraîner la saturation. Un affaiblissement du flux estcompensé par un accroissement du glissement. Le couple maximum diminue. Un contrôledirect du flux et du couple évite cela.
2.8.1 Alimentation en couranta) Commutateur de courant

Commande scalaire de la machine asynchrone
Dr A. Meroufel 46 2008/2009
b) Onduleur de tension régulé en courant
Fig 2.14 Commande scalaire avec autopilotage et régulation du flux
MAS
OND
RED
PI
Lf
PI
GT
-
-
++ +
Isc
Id
ref s
3 ~
r
PIref
r-
PI
Estimateur
er Cet ˆ
-
reC
abcI
abcV
Fig2.15 Commande scalaire avec autopilotage et régulation du flux
Isc
PIref
r-
Estimateur
rrMAS
ONDPI
GT
-
-+ ++
*abcI
refs
RED
Cf Lf
3 ~
r
Générateurde courants
abcI
abcI
abcV

Commande scalaire de la machine asynchrone
Dr A. Meroufel 47 2008/2009
2.8.2 Alimentation en tension
On réalise une régulation en cascade flux–courantOn choisit la régulation du flux rotorique lié au repère ‘dq’
qsr
qrqr
rdr ILM
I
0
(2.29)
1- casLa pulsation des courants rotoriques est assimilée à un paramètre. Ceci est vrai si lesvariations sont lentes vis-à-vis des courants et flux.De l’équation rotorique vue dans le repère ‘dq’, on a
rsrr
sr
r jM
IM
dtd
)( (2.30)
On définit
22
22
)()1(
)()1()1(
rrr
rr
s
qr
rrr
r
s
dr
sM
I
ssM
I
(2.31)
Pour la fonction de transfert entre le flux rotorique et le courant statorique, on utilise lespetites variations ( xxx o )
Fig2.16 Commande scalaire avec autopilotage et régulation du flux
MAS
ONDPI
GT
-+
+ +
ref sr
PIref
r-
PI
Estimateur
er Cet ˆ
-
reC
RED
Cf
Lf
3 ~
sV
abcV
abcI

Commande scalaire de la machine asynchrone
Dr A. Meroufel 48 2008/2009
22
2
2 )()1()()1(
)(1 rror
rror
rros
r
ssM
I
(2.32)
Pour les faibles valeurs de la pulsation rotorique, la fonction de transfert se ramène à unpremier ordre de constante de temps
rs
r
sM
I
1(2.33)
2- casLa pulsation des courants rotoriques est une variable comme les courants et le flux et l’étude par les petites variations amène aux relations de transfert suivantes :
rsqr
rsdr
sGIsFsGIsF
)()()()(
22
11 (2.34)
Les conclusions sont semblables pour les régimes tansitoires du flux. A flux constant, lecourant statorique et la pulsation rotorique sont liés et les résultats sont comparables à ceux du1 cas.
2.8.3 Etude du régulateur de fluxSi la boucle interne de courant est du premier ordre de constante de temps iT , on aura leschéma fonctionnel suivant :
Selon le schéma bloc
)1)(1( irsref
r
sTsM
I
(2.35)
On utilise la méthode de l’optimum symétrique pour le dimensionnement du régulateur car le pôle dominant r est variable avec la température et l’état magnétique de la machine.Du fait que riT en général, on approxime
)1(1
)1( bairsref
r
sssTsM
I
(2.36)
Fig 2.17 Boucle de régulation du flux
ss
k1
isT11
rsM1
ref srefIsI r
-

Commande scalaire de la machine asynchrone
Dr A. Meroufel 49 2008/2009
On choisit pa / . Pour optimiser la marge de phase, le gain doit être égal à ba ak / .La fonction de transfert en boucle fermée pour le flux peut être approchée par une fonction dupremier ordre de constante de temps aTi .
sasTM
iref
r
11
1(2.37)
Pour garder un contrôle rapide du flux, on choisit msms 5030 . De ce choix on définit‘a’
2.8.9 Alimentation en tensionLe schéma du variateur est représenté sur la figure
Dans un repère lié au flux rotorique et en supposant la tension orthogonale au flux on a :
0,
0ds
sqs
qr
rdr
V
VV
(2.38)
A partir des équations électriques de la machine
dssqsqssqs
qssdsdss
dtd
IRV
dtd
IR
0(2.39)
drrqrqrr
qrrdrdrr
dtd
IR0
dtd
IR0
Et si les pulsations statoriques et rotoriques sont supposées des paramètres, le système estlinéarisé et la fonction de transfert approchée est du premier ordre.
)()(
1
s
ss
r
rrs
r
srrsqs
dr
RL
RL
MR
sR
MLLV
(2.40)
La constante de temps et le gain statique sont respectivement :
)(,
)()(
sr
rsrss
srrrss
srrs
LRLR
L
MB
RLRLLL
T
(2.41)
Souvent les constantes statorique et rotorique sont égales
r
r
s
s
RL
RL
T
et)( rssL
MB
(2.42)

Commande scalaire de la machine asynchrone
Dr A. Meroufel 50 2008/2009
On choisit en régulation de flux un correcteur PI (proportionnel intégral) ou IP figure
On évite de compenser T qui est variable et on définit le régulateur par un placement despôles de manière que la constante de temps équivalente en boucle fermée soit de l’ordre de 30ms à 50ms.Si les pulsations statoriques et rotoriques sont des variables au même titre que le flux et latension, on linéarise le modèle autour du point de fonctionnement.
rbqsadr sGVsG )()( (2.43)
)()(
1)(
s
sso
r
rros
r
srrosoa
qs
dr
RL
RL
MR
sR
MLLsG
Vr
(2.44)
2.9 Contrôle de la vitesseOn suppose le flux régulé et pour les deux modes d’alimentation, la fonction de transfert
sref
r
11
(2.45)
L’expression du couple qsrr
e ILM
pC
Dans le repère choisit, le courant qsI est relié au flux par l’expression
rrr
qs MI
(2.46)
En effet
0 drrqrr IR car 0drdtd d’où qr
rqs I
ML
I et 2dr
r
re R
pC
(2.47)
Pour des petites variations autour du point de fonctionnement
refrorefr
rrefr
e sRp
Rp
C
1
122 (2.48)
Si le flux de référence est constant, la relation de la partie mécanique est
rm
rm
Cs
ks
k
1121 (2.49)
Fig 2.18 Boucle de régulation du flux (alimentation en tension)
ss
k1
sTB1
ref qsV r
-

Commande scalaire de la machine asynchrone
Dr A. Meroufel 51 2008/2009
rr
ref
rrm Rf
pkf
pkfJ
2
12 ,,
Avec un régulateur PI, le schéma fonctionnel est le suivant
refmb
a savecsssk
ss
sG )()1(
)1()()(
)( 1 (2.50)
Le calcul du régulateur se fait par placement des pôles de la fonction de transfert en bouclefermée
0)1()1(1 mba sssk (2.51)
Le cahier des charges permet de faire le positionnement des pôles. Comme le système est dudeuxième ordre, un choix judicieux serait de prendre deux pôles complexes conjugués avecun amortissement de 0.72.10 SimulationLe bloc de simulation de la commande scalaire avec alimentation en tension est représenté parla figure2.20
Fig2.19 Boucle de régulation de vitesse
b
a
ss1
r
ref
R
p 2ref reC
- sJfp
r
-rC
r
Fig 2.20 Commande scalaire : alimentation en tension

Commande scalaire de la machine asynchrone
Dr A. Meroufel 52 2008/2009
2.10.1 Résultats de simulationLa vitesse suit correctement la référence. Le rejet de perturbation est rapide sans oscillations.Le couple présente des fluctuations à chaque variation de régime. Les performances sontacceptables. La variation de la vitesse en charge est très lente et le couple est très fluctué.
2.11 Conclusion
Dans le cas d’un contrôle scalaire, le modèle de la machine est non linéaire et il est nécessaire de faire appel à des petites variations autour du point de fonctionnement. Cette approche estsuffisante pour l’obtention de commandes moyennement performantes.Les principes de contrôle du couple électromagnétique de la machine asynchrone que nousvenons d’étudier ont tous étéélaborées à partir du modèle statique ceci a pour conséquenceque le couple n’est plus contrôlé lors des régimes transitoires.Dans le cas où l’on désireaméliorer le contrôle du couple on régule directement le flux dansles deux cas d’alimentation de l’onduleur.Dans certain cas l’autopilotage est réalisé sans capteur mécanique à l’aide d’observateurs de flux et de vitesse.Pour des performances moyennes et pour les fonctionnements en survitesse, on fait appel depréférence au contrôle scalaire.
Fig 2.21 Réponses à un échelon de vitesse avec application d'une charge

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 53 2008/2009
Commande vectorielle de la machine asynchrone
3.1 IntroductionDans ce chapitre, nous présentons les principes de base de la commande vectorielle.
Puis nous exposons les deux types de contrôle du flux direct et indirect avec un aperçu sur lesobservateurs de flux. D’autre part, nous rappelons d’une manière brève les méthodes de commande en courant et en tension. Ensuite nous ferons le choix des correcteurs classiques etnous terminons par une simulation suivie d’une interprétation des résultats
3.2 Principe de la commande vectorielleLe principe de la commande vectorielle a été découvert par Blaschke en 72. Il ramène le
comportement de la machine asynchrone à celui d’une machine à courant continu.Denombreuses variantes de commande vectorielle ont été présentées dans la littérature techniqueque l’on peut classer de la façon suivante:
- Mode d’alimentation Commande en tension Commande en courant
- Détermination de la position du flux Directe nécessite mesure du flux ou observation Indirecte nécessite le contrôle de la fréquence de glissement
- Acquisition du flux Fondée sur un modèle du rotor Fondée sur un modèle du stator Observation de flux
- Orientation du repère d,q sura- Flux rotorique , b- Flux statorique , c-Flux d’entrefer
Le contrôle du flux statorique ou du flux d’entrefer n’assure pas un découplage total entre le couple et celui du flux. Nous nous limitons à étudier le principe de la commande vectorielleavec orientation de l’axe ‘d’ suivant l’axe du flux rotoriquevoir figure 3.1. Elle présente demeilleures performances par rapport aux autres techniques d’orientation.
q sI
qsI
d
s
dsI
s
s
r
Fig 3.1 Principe de la commande vectorielle

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 54 2008/2009
Si le repère est parfaitement orienté, alors la composante qr est nulle et rdr . Ceci
simplifie le modèle (1.21)et l’équation mécanique (1.19). L’avantage d’utiliser ce repère est d’avoir des grandeurs constantes en régime permanant. Il est alors plus aisé de faire la régulation. Dans ces conditions, le modèle de la machine alimentée en tension lié au champtournants’écrit:
)e1.3(J
C
J
fI
JLpM
23
dt
d
)d1.3(ITM
)(dt
d
)c1.3(.T1
ITM
dt
d
)b1.3(VL1
kIIdt
dI
)a1.3(VL1
T
kII
dt
dI
rr
rqsr
r
r
qsr
drrsqr
drr
dsr
dr
qss
rsrdssqsqs
dss
rr
sqssds
ds
(3.1)
Afin de maintenir le flux qr nul, il faut imposer 0dt
d qr
. En introduisant la vitesse
angulaire de glissement, nous avons avec l’équation (3.1d), la relation suivante
r
qs
rrs
sr I
TM
dtd
(3.2)
Prenons l’équation (3.1c) en utilisantl’opérateur dt/ds , le flux rotorique s’écrit
dsr
dr IsT1
M
(3.3)
D’autre part à partir de l’équation (3.1e), le couple est donné par
qsrr
e ILM
p23
C (3.4)
On peut donc commander le flux rotorique à l’aide de la composante dsI (équation (3.3)) de
même on peut commander le couple avec la composante qsI (équation (3.4)), si le flux
rotorique est constant. C’est pourquoi on parle de découplage dans la commande vectorielle. Ainsi, la machine asynchrone est contrôlée d’une façon analogue à la machine à courant continu à excitation séparée figure 3.2.

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 55 2008/2009
Pour assurer à tout instant un couple maximal, le flux doit être maintenu à sa valeur nominale.Pour les régimes de grandes vitesses, il faut garder un niveau énergétique constant, donc ilfaut réduire le flux (voir figure3.3). Dans ce cas, le flux n’étant plus constant, le découplage opéré disparaît et le contrôle du couple est difficile à assurer.
Le bloc de défluxage est défini par la fonction non linéaire suivante
défluxageemodpour.
normalemodpour
rnrr
rnrn
rnrrn
ref (3.5)
Il assure le fonctionnement à flux constant ou couple constant pour les vitessesinférieures à la vitesse nominale et au delà de cette vitesse il permet de diminuer le couple.Dans ce cas, il assure un fonctionnement à puissance constante ou tension constante.
faec IIKC
MCC
aI fI
Découplaged-q
MAC
dsI
qsI
AI
BI
CI
qsdste IIKC
Composante du flux
Composante du couple
aU eU
Figure 3.2 : Analogie entre la machine à courant continu et la MAS
)(fC
maxC
RégimeSous vitesse
RégimeSur vitesse
Fonctionnementà flux constant
Fonctionnementà puissance constante
Fig 3.3 Bloc de défluxage(Opération à toutes les vitesses par action sur la fréquence)
sf
snf
Couple
nU
)f(fU sn

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 56 2008/2009
*ds
*qs
r
r
I
I
LR
*dsI
*qsI
sl
r
ss++
Fig 3.4 Méthode de la commande vectorielle indirecte
Notons que le problème essentiel de la commande est de déterminer la position et lanorme du flux rotorique. Il existe deux variantes de commande vectorielle (Directe etIndirecte).
Dans le cas d’une commande indirecte, l’angle s est calculé à partir de l’expression de
la vitesse de glissement (3.2) our
qs
rrss
I
TM
(figure 3.4)
Dans le cas de d’une commande directe, l’angle s est mesuré, observé ou estimé
(figure 3.5).
Il existe deux groupes d’estimateur de flux rotorique (boucle ouverte et boucle fermée)a- boucle ouverte
Modèle du courant
sr
rr
ss
r
sr )
T1
j(ITM
dtd
: Équation relative au stator (3.6)
rr
r
rs
r
rr T
1I
TM
dtd
: Équation relative au rotor (3.7)
Modèle de la tension
t
0
sss
ss
ss dt)IRV( (3.8)
sr
r
ssrs
ss L
MIL (3.9)
)IL(M1
I rss
rs
rr (3.10)
A partir des équations statoriques (3.9) et (3.10), on définit le flux rotorique
)(tanr
r1
s)I(
s)V( s
Fig 3.5 Méthode de la commande vectorielle directe
Observateurde flux

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 57 2008/2009
t
0
sss
sss
ss
rsr ILdt)IRV(
ML
(3.11)
b- Boucle fermée (observateur) Observateur de flux Luenberger adaptatif MRAS (Model Reference Adaptive System) Filtre de Kalman Mode glissantetc…
3.3 Contrôle vectoriel direct et indirect
Dans le contrôle vectoriel direct, on effectue une régulation du flux qui nécessite laconnaissance de celui-ci, alors que dans le contrôle vectoriel indirect, on s’affranchit de la connaissance de ce flux en faisant quelques approximations.
3.3.1 Contrôle vectoriel direct
Cette méthode nécessite une bonne connaissance du module du flux et de sa phase et celle–cidoit être vérifiée quelque soit le régime transitoire effectué. Une première possibilité est demettre des capteurs de flux dans l’entrefer et de mesurer directement les composantes r et
r de manière à en déduire l’amplitude et la phase. Les capteurs, mécaniquement fragiles, sont soumis à des conditions sévères dues aux vibrations et aux échauffements. La précisionde la définition du flux dépend des paramètres inductifs affectés par la saturation du circuitmagnétique. D’autre part, les signaux captés sont entachés de bruits engendrés par lesencoches et nécessitent des filtres ajustables. La mesure directe permet de connaîtreexactement la position du flux. Ce mode de contrôle garantit un découplage correcte entre leflux et le couple quel que soit le point de fonctionnement. Toutefois il nécessite l’utilisationd’un moteur équipé de capteurs deflux, ce qui augmente considérablement le coût de safabrication et rend plus fragile son utilisation figure 3.6.
emdf
dcV
*r
emqfdq
abc
OND
MLI
MAS
s
abcI
r
*r
dsI
qsI
*qsV
*dsV
- -
-
Fig 3.6 Commande vectorielledirecte d’une MAS
*qsI
*dsI
GT
dq
abc
-
Calcul de r~
Calcul de sr
r
r

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 58 2008/2009
emqemd f,f : Termes de compensationDans la grande majorité des cas, onévite l’utilisation des capteurs de flux. On fait appel à desestimateurs (boucle ouverte) ou à des observateurs (boucle fermée) du flux à partir desmesures classiques (courant, tension, vitesse) facilement accessibles effectuées sur le montagefigure 3.7.
Un estimateur permet de reconstruire la grandeur recherchée en calculant en temps réell'évolution d'un modèle du processus à commander. Dans le cas de l'observateur figure 3.8, oncompare l'évolution du modèle et du système réel en mesurant l'erreur sur des grandeurs quel'on peut directement capter. Cette erreur est alors utilisée pour faire converger le modèle versle système réel. Il s'agit d’un système bouclé. L'estimation/observation demande souvent descalculs assez complexes avec des contraintes temporelles identiques à celles de la régulation.
emdf
dcV
*r
emqfdq
abc
OND
MLI
MAS
s
abcI
abcV
r
*r
r
dsI
qsI
*qsV
*dsV
- -
-
Fig 3.7 Commande vectorielle directe d’une MASAvec observateur de flux rotorique
*qsI
*dsI
Observateur de flux
GT
B
A
C
K
X Y
YX
+
+U
B
A
C+
++
+
-
X
X
Fig3.8 Schéma de principe d’un observateur
Modèle du système
Estimateur
Observateur
X

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 59 2008/2009
3.3.2 ObservateurIl existe de nombreuses techniques d’observation classées en fonction de trois critèresdifférents.
le premier se base sur la nature du système considéré. On distingue les observateurspour les systèmes linéaires et non linéaires
Le deuxième en fonction de l’environnement, on trouve deux types:a- l’observateur qui prend en considération les perturbations externes du système b-l’observateur stochastique qui tient compte des bruits des états et mesures.
le dernier critère est la dimension du vecteur d’état. Il existe des observateurs d’ordre complet, réduit et étendu.
Dans ce manuscrit nous présentons un observateur adaptatif d’ordre complet avec estimation de la vitesse.
3.4 Régulation, méthodes classiques3.4.1 Commande vectorielle avec alimentation en tension
Les tensions dsV et qsV influent à la fois sur les courants dsI et qsI et par conséquent sur
le flux et le couple. Donc il est nécessaire de réaliser un découplage pour commanderséparément les courants. Dans ce cas, nous utilisons le découplage par compensation.
drssrdsssqs
sqssqs
drsr
sqsss
dssdssds
LkILdt
dILILV
LT
kIL
dt
dILILV
(3.12)
Et afin de commander dsV et qsV qui dépendent de dsI et qsI par une fonction du premier
ordre, il faut éliminer les termes de couplage par une précompensation. Ceci nous amène àécrire les tensions sous la forme
qc*qsqs
dc*dsds
eVV
eVV(3.13)
Avec
drssrdsssqc
drsr
sqsssdc
LkILe
LT
kILe

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 60 2008/2009
3.4.2 Découplage par compensationPour rendre les axes d et q complètement indépendants, il est nécessaire d’ajouter des
termes identiques de découplage mais de signe opposé à la sortie des régulateurs comme lemontre la figure 3.9.
On obtient un nouveausystème d’équations linéaire parfaitement découplé
dt
dILILV
dt
dILILV
qssqss
*qs
dssdss
*ds
(3.14)
Le découplage permet d’écrire les équations de la machine sous une forme simple ce quifacilite considérablement le dimensionnement des coefficients des régulateurs. Donc, aprèsorientation du flux rotorique et découplage par compensation, on aboutit alors à un schémabloc simple et identique pour les deux composantes du courant statorique figure 3.10.
/1Ti
La composante du courant qsI contrôlera le couple et celle du courant dsI contrôlera le flux.
Les grandeurs mesurées dont nous avons besoins pour la régulation sont :- la vitesse: donnée par un codeur incrémental monté sur l’arbre du moteur- Les courants statoriques : donnés par des sondes à effet Hall
qIRis sT1
1L
1
qsI*qsI
Fig 3.10 Boucle qsI après découplage
dIR
qIR
is sT11
L1
dce dce
qce qcedsI
*dsI
qsI
dsI
*qsI
*qs
V
*ds
V
Modèle de la machineRégulation et découplage
Fig 3.9 Découplage par compensation
is sT11
L1

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 61 2008/2009
- Le flux rotorique : donné le plus souvent par des observateurs
3.4.3 Régulation des courantsNous représentons les retards du convertisseur statique (onduleur MLI) et les blocs de
conversion par la fonction de transfert suivante.
fr sT1
1)s(F
(3.15)
Pour chacune des boucles de courant, nous avons adopté un régulateur
PI.
q,dj)
sT1
1(Kj
j . Le schéma bloc devient (figure 3.11)
La fonction de transfert en boucle ouverte est
i
s
fq
qqoi sT1
L/1.
sT11
.sT
sT1KG
(3.16)
On dispose de deux degrés de liberté pour réguler le système. Nous avons choisid’utiliser qT afin d’éliminer le pôle le plus lent, puiscalculer qK selon le critère ‘harmonique
méplat’. Cela permet d’avoir une réponse rapide avec un minimum de dépassement et une bonne stabilité du système.
)sT1(s1
L
KG
TT
fs
qoi
iq
(3.17)
La fonction de transfert en boucle fermée devient :
200
2
20
fs
q
f
2fs
qfi
s2sTL
K
T1
ss
1.
TL
KG
(3.18)
Avec
fs
q0
fq
s
TL
K;
TKL
21
is sT11
L1
qsI
*qsI
Fig 3.11 Boucle de régulation du courant qsI
)sT1
1(Kq
q fsT1
1
*qsV

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 62 2008/2009
Lors d’un échelon de consigne pour unamortissement 2/1 , on a un dépassement de
43%. D’où
ms2TT2L
K
f
f
sq (3.19)
3.4.4 Régulation de la vitesseLe schéma de régulation en cascade nécessite, pour un bon fonctionnement, que la
boucle interne (courant) soit plus rapide que la boucle externe. Par conséquent, le schéma blocde régulation de vitesse peut être représenté par la figure 3.12
*r
rt L
Mp
23
k
La fonction de transfert en boucle ouverte est donnée par la relation
m
rt
v
vvov sT1
f/k.
sTsT1
KG
(3.20)
En appliquant la méthode du pôle dominant, on aura
mr
tvov
rmv
sT1
.f
kKG
f/JTT(3.21)
En boucle fermée, on aura
rtv
mfv
f/kKT
s1
1G
(3.22)
On prend généralement.
rvtvtvrmrv tk/J3Koù'dkK/fT3t (3.23)
3.4.5 Régulation du flux rotorique
m
r
sT1f/1
.
r*r
Fig 3.12 Boucle de régulation de la vitesse
)sT
11(K
vv tk
rC
eC

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 63 2008/2009
Le schéma bloc de la régulation du flux rotorique est représenté par la figure 3.13. La
boucle interne de courant dsI est négligée
En appliquant la méthode du pôle dominant, on aura
sT/M.KGou'dR/LTT orrr (3.24)
En boucle fermée, on aura
MK
Ts1
1G f
(3.25)
On prend
rt.M/T3K (3.26)
Pour effectuer de manière adéquate le choix réponses désirées et établir la synthèse desrégulateurs, il faut conserver la relationTemps de réponse pratique du flux rotorique >> au temps de réponse pratique du courant dsI
( qsI ).
Temps de réponse pratique de la vitesse >> au temps de réponse pratique du flux rotorique
3.5 Dimensionnement graphique des régulateurs sous Matlab/SimulinkAvec ces structures de régulateur, il n’a pas été possible d’obtenirde bonnes
performances pour le suivi et le rejet de perturbation. Ceci nous a amené à prendre unestructure PI avec anti-windup pour le régulateur de vitesse figure 3.14. Pour une commandesans dépassement et un rejet de perturbation rapide, nous avons mis en œuvre une méthode sous l’environnement Matlab/Simulink pour le dimensionnement des coefficients descorrecteurs en utilisant un outil d’optimisation non linéaire graphique basé sur le principe des moindres carrés. Le schéma fonctionnel de la méthode est présenté sur la figure 3.15 oùseulement les coefficients du flux et de la vitesse sont pris en considération par cette
technique.L’action wk est déterminée par tâtonnement. La figure 3.16 montre les réponses de
la commande vectorielle directe en tension du système idéalisé avec orientation exacte, sansretard et découplage parfait.
dsI
rsT1M
.
r*r
Fig 3.13 Boucle de régulation du flux rotorique
)sT1
1(K

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 64 2008/2009
3.5.1 Simulation avec les blocs NCDLes blocs NCD (Nonlinear Control Design) sont des outils permettant de dimensionner
de manière graphique la forme de la réponse temporelle désirée en spécifiant les contraintessur son évolution dans le temps et d’exécuter la routine de calcul permettant aller trouver les coefficients optimaux.Le schéma bloc de simulation et les réponses sont donnés respectivement par la figure 3.15 etla figure 3.16
wK
)sT
11(K
vv
m
r
sT1f/1
.
r*r
Fig 3.14 Boucle de régulation de la vitesse avec action anti-windup
rC
eCtk
Fig 3.15 Dimensionnement des correcteurs par les Blocs NCDsous Matlab/Simulink

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 65 2008/2009
La réponse en vitesse aux échelons 156 rd/s est sans dépassement, sans erreur statique etavec un rejet de perturbation très rapide. D’autre part, le courant qsI est limité et contrôle le
couple tandis que le courant dsI contrôle le flux rotorique.
3.6 Principe du contrôle vectoriel indirect
Dans cette méthode, on ne régule pas le flux rotorique, on a donc besoin ni de capteur, nid’estimation ou d’observateur de flux. Si l’amplitude du flux rotorique réel n’est pas utilisée, sa position doit être connue pour effectuer les changements de coordonnées figure 3.17. Ceciexigela présence d’un capteur de position du rotor/vitesse.
emdf
dcV
*r
emqfdq
abc
OND
MLI
MAS
s
abcI
r
*r
dsIqsI
*qsV
*dsV
- -
-
Fig 3.17 Commande vectorielle indirecte d’une MASAlimentée en tension
*qsI
*dsI
GT
dq
abc
M1
*ds
*qs
r
r
I
I
LR
*dsI*qsI
sl
rs+
+
Fig 3.16 Réponses du système idéal aux échelons de vitesse156 rd/savec application de la charge

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 66 2008/2009
Pour une alimentation par un onduleur de courant le contrôle vectoriel est simplifiéfigure3.17. La méthode repose en grande partie sur la capacité de l’onduleur et de sa commande à imposer les courants désirés. Une mauvaise information sur la vitesse peut nuireà la détermination de la position du flux dans la commande indirecte. En plus, cettecommande est très sensible aux variations paramétriques et en particulier la constante detemps rotorique c'est-à-dire rR qui intervient sur la définition de s .
La mesure de la vitesse rotorique et l’estimation de la constante de temps rotorique apparaissent comme des problèmes majeurs de la commande par orientation du flux. Plusieurstravaux ont été fait dans la correction en ligne des variations paramétriques pour la commandevectorielle où des algorithmes d’estimation de la vitesse ont pris la place des capteursmécaniques.
3.7 Commande vectorielle directe sans capteurs
Des exigences de simplicité et de robustesse deviennent des critères les plus importantsdans des applications de commande vectorielle. Ainsi, on essaie de faire remplir la fonctiondes capteurs par des algorithmes de calcul pour reconstituer la vitesse de la machine. Il existedans la littérature technique plusieurs méthodes de commande sans capteur mécanique.
Nous présentons dans ce recueil une commande vectorielle directe sans capteurmécanique basée sur la technique des observateurs adaptatifs de type Luenberger.
3.7.1 Représentation de l’observateur adaptatifLa structure de l’observateur adaptatif est illustrée par la figure.3.19.
dcV
*r
dq
abc
Ond
Hyst
MAS
s abcI
r
*r
-
Fig 3.18 Commande vectorielle indirecte d’une MAS
Alimentation en courant
*qsI
*dsI
GT
M1
*ds
*qs
r
r
I
I
LR
*dsI
*qsI
sl
r
s++
*r
r
pML
32
asI
bsI
csI
eC

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 67 2008/2009
L’objectif de cet observateur est de donnerune structure minimale à la commande vectorielledirecte. Lorsque lavitesse de rotation de la MAS n’est pas mesurée elle est considérée comme un paramètre inconnu dans le système d’équations de l’observateur. En utilisant la méthodede Lyapunov au système observateur de Luenberger, on aboutit à un schéma d’adaptationpour estimer la vitesse rotorique. Donc, pour réaliser notre observateur nous devons choisirles grandeurs à observer. Dans notre application de la commande vectorielle directe de laMAS, nous pouvons poser les considérations suivantes :
Paramètres du modèle : connus et invariantsCourants statoriques : mesurésPulsation et tensions statoriques : fournies par la commandeFlux rotorique : à observerVitesse rotorique : à observer.
3.7.2 Modèle de la MAS dans le repère (,)A présent, nous allons procéder à la mise en équations d’états du modèle de la machine
qui nous servira à concevoir notre observateur. Pour établir un bon compromis entre lastabilité et la simplicité de l’observateur, il convient de prendre un repère d’axes lié au stator. Donc, le modèle de la MAS est décrit par l’équation d’état suivante :
CXYBUXAX (3-27)
Tel que : Tsss
Tsss
Trrss VVVU,IIIY,IIX
Avec :
Observateurde Luenberger
Mecanismed’adaptation
Fig 3.19Structure de l’observateur adaptatif
r
r
sI
sU
sI
r

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 68 2008/2009
.00100001
;
0000
10
01
;
00
00
54
54
231
321
CL
L
B
aaaa
aaaaaa
As
s
r
r
r
r
En plus :
,
1,,,,
1154321
rr
m
rs
m
rrs
m
rs Ta
TM
aLL
Ma
TLLM
aTT
a
3.7.3 Observabilité
La commandabilité et l’observabilité d’un système sont deux principales caractéristiques d’un système dynamique. La condition d’observabilité d’un système assure que les variables d’états sont observables à partir de ses entrées et sorties. La vérification du critère d’observabilité permet d’affirmer qu’on peut calculer l’état initial du système 0tX enfonction des valeurs mesurées de la sortie 0tY et de l’entrée 0tU . En connaissantl’équation d’état du système et l’état initial0tX , on définit par la suite le vecteur d’étattX .
Selon le critère de kalman, le système est observable si le rang de la matriced’observabilité 0Q est égal à n, ou n est la dimension du vecteur d’état X. La matrice 0Q seformule de la manière suivante :
nQrang
CA
CAC
Q 01n
0
(3.28)
Autrement dit, la matrice 0Q de dimension (n, np) doit avoir au moins n lignesindépendants (p étant la dimension du vecteur de sortie Y).
3.7.4 Observabilité de l’état de la MAS Considérons une MAS alimentée en tension par un onduleur de tension. Pour un
référentiel lié au stator, les variables d’entrées sont les composantes de la tension statorique
sV , sV , et les variables de sorties sont les composantes du courant statorique sI , sI .
Comme la transformation linéaire ne modifie pas le critère d’observabilité, il est commode de présenter l’équation d’état du système avec les variables complexes.
Le vecteur d’état choisi comprend les deux composantes du courant statorique et deuxcomposantes du flux rotorique.

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 69 2008/2009
s
s
r
s
rrr
rrrs
m
sr
r
s
V
L
I
jTL
M
jTLL
LTT
I
dtd
0
1
1
1111
(3.29)
r
s
s
II
01 (3.30)
Où les grandeurs surlignées représentent des quantités complexe, avec :
sss
ssS
sss
VjVV
j
IjII
(3.31)
La matrice d’observabilité en notation complexe est donnée comme suit :
rrrssr
jTLL
MTT
CA
C
Q
1111
01
0 (3.32)
Le calcul de son déterminant permet de vérifier la condition d’observabilité:
r
rrs
jTLL
MQ
1
det 0 (3.33)
En effet,
0)()(
1detdet 2
2
22
00
r
rrs TLLM
(3.34)
Le carré du déterminant de la matrice d’observabilité complexe donne le déterminant de lamatrice d’observabilité 0Q . On constate que le système est observable car pour tous les pointsde fonctionnement de la machine, ce déterminant est différent de zéro.
3.7.5 Observateur de LuenbergerCet observateur permet de reconstituer l’état d’un système observable à partir de la
mesure des entrées et des sorties. Il est utilisé lorsque tout ou une partie du vecteur d’état ne peut être mesuré. Il permet l’estimation des paramètres variables ou inconnus d’un système.L’équation de l’observateur de Luenberger peut être exprimée par:

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 70 2008/2009
XCY
KBUXAX Y(3.35)
Tel que :YYY (3.36)
3.7.6 Détermination de la matrice de gains K
La détermination de la matrice K utilise la procédure conventionnelle de placement depôles. On procède par l’imposition des pôles de l’observateur et par conséquent de sa dynamique. On détermine les coefficients de K en comparant l’équation caractéristique de l’observateur « 0C)KA-(pIDet » avec celle que l’on souhaite imposer. En développantles différentes matrices A, K et C on obtient l’équation suivante:
0ˆ111ˆ1ˆ112
r
rrsr
m
rsr
rr
rs
jTLL
MK
TL
KTT
jT
pKjTT
p
(3.37)
Ou Ket K sont des gains complexes.
La dynamique de l’observateur est définie selonl’équation suivante:
0ˆ111ˆ1ˆ11 22
r
rrsrrsr
rr
rs
jTLL
MTM
TTj
Tkpj
TTkp
(3.38)
dont les racines sont proportionnelles aux pôles de la MAS ; la constante deproportionnalité k est au moinségale à l’unité .1k
L’identification des expressions (3 .37) et (3 .38) donne :
r
sr
rsr
s
r
m
r
s
rs
rrs
LML
jTTL
MLk
TL
LML
TTkK
jTT
kK
ˆ111
111
ˆ11)1(
(3.39)
Pour avoir les coefficients de la matrice de gain de l’observateur on pose:
43
21
jKKKjKKK
(3.40)
Et conformément à l’antisymétrie de la matrice A on pose le gain suivant:

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 71 2008/2009
K=
34
43
12
21
KK
KKKKKK
(3.41)
Ou :
rr
s
rsr
s
rr
s
rs
r
rs
LML
kK
kTTL
MLTM
LML
TTkK
kK
TTkK
ˆ1
11111
1
ˆ1
111
4
23
2
1
(3.42)
Les pôles de l’observateur sont choisis afin d’accélérer sa convergence par rapport à ladynamique du système en boucle ouverte. En générale, les pôles sont 5 à 6 fois plus rapides,mais ils doivent rester lents par rapport aux bruits de mesure, ce qui fait que l’on choisit le constant k usuellement petit.
3.7.7 Représentation d’état de l’observateur de Luenberger
Comme l’état n’est en général pas accessible, l’objectif d’un observateur consiste à réaliser une commande par retour d’état et d’estimer cet état par une variable que nous noterons X .
Tel que :T
rrss IIX
ˆˆˆˆˆ (3.43)
D’après l’équation 3-35, on peut représenter l’observateur par le système d’équations suivant :
ssssrrrsr
ssssrrrsr
ssssss
rrrss
ssssss
rrrss
IIKIIKaIa
IIKIIKaIa
IIKIIKVL
aaIaI
IIKIIKVL
aaIaI
ˆˆˆˆˆˆ
ˆˆˆˆˆˆ
ˆˆ1ˆˆˆˆ
ˆˆ1ˆˆˆˆ
3454
4354
12321
21321
(3.44)
Donc, la représentation d’état de l’observateur devient comme suit :

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 72 2008/2009
rs
rs
s
s
s
s
r
r
s
s
r
r
r
r
r
r
s
s
II
II
KKKKKKKK
V
VL
LI
I
aa
aaaaa
aaaI
I
ˆ
ˆ
0000
10
01
ˆ
ˆ
ˆ
ˆ
0
00
0
ˆ
ˆ
ˆ
ˆ
34
43
12
21
54
54
231
321
(3.45)
Cette représentation peut prendre la forme suivante :
ssr IIKBUXAX ˆˆˆ (3.46)Avec : T
ssssss IIIIII ˆˆˆ (3.47)
3.7.8 Observateur adaptatif de LuenbergerSupposons maintenant que la vitesse est un paramètre constant inconnu. Il s’agit de
trouver une loi d’adaptation qui nous permet de l’estimer.L’observateur peut s’écrire:
)(ˆ)(ˆssr IIKBUXAX (3.48)
Avec :
54
54
231
321
0
0
0
0
)(
aa
aa
aaa
aaa
A
r
r
r
r
r
(3.49)
Le mécanisme d’adaptation de la vitesse sera déduit par la théorie de Lyapunov. L’erreur d’estimation sur le courant statorique et le flux rotorique, qui n’est autre que la différence entre l’observateur et le modèle du moteur, est donnée par:
XAeKCAe ˆ)()( (3.50)
Avec :
00000
000
000
)()( 3
3
r
r
r
r
rr
a
a
AAA
(3.51)
Ou’:
rrr ˆ (3.52)
TII rrsseeeeXXe
ˆ (3.53)
Maintenant, considérons la fonction de Lyapunov suivante : /)( 2
rT eeV (3.54)
Sa dérivée par rapport au temps est :

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 73 2008/2009
)(1)(
rT
T
dtd
dtde
eedted
dtdV
2 (3.55)
rrrIrIrTT
dtd
eeaeKCAKCAedtdV
ss
ˆ2ˆˆ2 3 (3.56)
Une condition suffisante pour avoir une stabilité asymptotique uniforme est que l’équation (3-56) soit négative, ce qui revient à annuler les deux derniers termes de cette équation(puisque les autre termes du second membre de (3.56) sont toujours négatifs), et dans ce cason peut déduire la loi d’adaptation pour l’estimation de la vitesserotorique en égalisant ledeuxième terme et le troisième de l’équation. On obtient :
t
rIrIr dteeass
03 )ˆˆ(.ˆ
(3.57)
Où est une constante positive
Cependant, cette loi d’adaptation est établie pourune vitesse constante et afind’améliorer la réponse de l’algorithme d’adaptation. On estime la vitesse par un régulateur PI décrit par cette relation :
dteeKeeK rIrIirIrIpr ssss)ˆˆ()ˆˆ(ˆ
(3.58)
Avec pK et iK qui sont des constantes positives.
3.7.9 Schéma de principe de l’observateur Luenberger adaptatifLe principe de l’observateur adaptatif de type Luenberger est représenté par la
figure3.20
MAS
+
-
B
A
C+
++
rIrI ss
ee
K
r
r
r
Fig 3.20 Schéma bloc de l’observateur adaptatif Luenberger
U
X Y
Y

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 74 2008/2009
a- Schéma bloc de l’observateur LuenbergerL’observateur en bloc Simulink avec Mux et fnc est réprésenté par la figure3.21
b-Mécanisme d’adaptationLe mécanisme adaptatif est représenté par la figure 3.22
c-Schéma bloc de l’observateur Luenberger adaptatif
4
Qbeta*
3
Qalpha*
2
df_ Isbeta*
1
df_ Isalpha*
a
b
c
alpha
beta
1s
1s
1s
1s
a4*u[2]+P*u[7]*u[3]+a5*u[4]+K4*u(7)*u[8]+K3*u[9]
a4*u[1]+a5*u[3]-P*u[7]*u[4]+K3*u[8]-K4*u(7)*u[9]
a1*u[2]-a3*P*u[7]*u[3]+a2*u[4]+(u[6]/(sigma*Ls))+K2*u(7)*u[8]+K1*u[9]
a1*u[1]+a2*u[3]+a3*P*u[7]*u[4]+(u[5]/(sigma*Ls))+K1*u[8]-K2*u(7)*u[9]
6Wre
5Isbeta
4Isalpha
3Vc
2Vb
1Va
Fig3.21Schéma bloc de l’observateurLuenberger
1
WrePIu[1]*u[4]-u[2]*u[3]
4
Qbeta*
3
Qalpha*
2
df_ Isbrta
1
df_ Isalpha
Fig3.22 Mécanisme adaptatif
2
Wre
1
Qr*
Va
Vb
Vc
Isalpha*
Isbeta*
Wre
df _Isalpha*
f d_Isbeta*
Qalpha*
Qbeta*
observateur adaptatifLuenberger
df _Isalpha
df _ Isbrta
Qalpha*
Qbeta*
Wre*
mécanisme d'adaptation
d
q
alpha
beta
dq__ alpha_beta
P
sqrt(u(1)^2+u(2)^2)
2
Idq
1
VaVbVc
Fig3.23Schéma bloc de l’observateur Luenberger adaptatif

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 75 2008/2009
3.8 Schéma de simulation de la CVD sans capteursa- Commande vectorielle directe
b- Résultats de simulation
Les simulations représentées dans cette section sont réalisées afin de tester la robustessede la CVSM basée sur un OA. Ces résultats sont obtenus grâce à l’utilisation des régulateurs classiques de vitesse et du flux de type PI. Un choix judicieux a été fait pour la valeur du gainkrelative à l’observateur et ceux du régulateur PIutilisé pour le mécanisme d’adaptation de la vitesse rotorique
k=1.05 Kp=2000 Ki=2600
Les performances statiques et dynamiques de notre commande sont analysées à partir dela simulation des modes de fonctionnement suivants :
Démarrage à videsuivi d’une applicationde chargeInversion du sens de rotation brusqueInversion du sens de rotation douce
c- Démarrage à vide suivi d’une application de chargeLa figure 3.25 illustre les résultats de la commande vectorielle directe sans capteur
mécanique à base d’un observateur luenbergeradaptatif avecapplication d’une charge de 10N.m entre les instants [1, 2sec] .
Fig3.24 Commande vectorielle directe d’une MASavec observateur adaptatif
Circuit de puissance
Circuit de commande
Vc
wr
Cr
Qr
[Wre]
[Qre]
Qr
S123
[Wr]
Vabc
[Idq]
[Vabc]
[S123]
[Qre]
[Idq]
[Wre]
Cr
Va
Vb
Vc
Wr
Idq
Qr
MAS
observateuradaptatif
Wref
Qref
D F O C
ONDULEUR
MLI
MLI

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 76 2008/2009
En remarque que notre commande et robuste vis-à-vis de la variation de la charge. Ainsi,l’erreur est très petite entre la vitesse réelle et estimée de même pour le flux et le courant.
3.9 Simulation de la commande vectorielleDifférentes structures de simulation de commande vectorielle avec leurs réponses sontprésentées ci-dessous.
Onduleur à MLI triangulo-sinusoidale
Sabc
Wref
1
flux_r
Circuit de commande
Circuit de puissance
Vc
Vq*
Vd*
Ws
Vd
Vq
decouplage
Cr
M L I
O N D U L E U R
wrCe
Qr
Iq
Id
w sl
OFR
w sl
w r
w +w l
teta
Id
M L I
Iq
Idq<, >
flux<, >
wr
ce Cr
Va
Vb
Vc
w
Idq
M A S
Fig 3.26Commande vectorielle indirecte d’une MASalimentée en tension
Fig 3.25 Réponses de la commande vectorielle directe avec observateurLuenberger adaptatif

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 77 2008/2009
Onduleur à MLI vectorielle
0 1 2 3 40
50
100
150
vite
sse
[rad
/sec
]
t [sec]
t [Sec]
0 1 2 3 4
0
0.5
1
1.5
t [Sec]
Flu
xro
toriq
ue[W
b]
t [sec]
0 1 2 3 4
0
20
40
coup
leC
em[N
.m]
t [sec] 0 1 2 3 4
0
5
10
t [Sec]co
uran
tsta
toriq
ue[A
]
t[sec]
0 0.5 1 1.5 2 2.5 3 3.5 4
-10
0
10
cour
ants
tato
rique
Is[A
]
t [sec]
f lux-qr
f lux-dr
idsiqs
Fig3.27 Résultats de simulation de la commende vectorielle indirecte de la MASalimentée par un onduleur de tension a MLI triangulo-sinusoidale [m=35, r=0.9])
Fig3.28 Commende vectorielle indirecte de la MAS alimentée par un onduleur detension a MLI vectorielle
Sabc
Wref
1
flux_r
Circuit de commande
Circuit de puissance
Vc
Vq*
Vd*
Ws
Vd
Vq
decouplage
Cr
ONDULEUR
MLI_Vect
wrCe
Qr
Iq
Id
w sl
OFR
w sl
w r
w +w l
teta
Id
Iq S
V
M
[Idq]
[flux]
[wr]
[ce] Cr
Va
Vb
Vc
w
Idq
M A S

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 78 2008/2009
Onduleur à hystérésis
Wref
1
flux_r
Circuit de commande
Circuit de puissance
Vc
wrIabc*
Iabcm
S123
PARK
(-1)
Ce
Qr
Iq
Id
w sl
OFR
Cr
ONDULEUR
Hystérésis
w sl
w rteta
Idq<, >
flux<, >
wr
ce
Ia
Ib
Ic
wr
Iabcm
M A S
Fig 3.30 Commande vectorielle indirecte d’une MASalimentée en courant
Fig3.29 Reponses de la commande vectorielle indirecte (Alimentation entension avec MLI vectorielle m= 25 , r=0.9)
0 0.5 1 1.5 2 2.5 3 3.5 4
-10
0
10
t[sec]
cour
ants
tato
rique
Is[A
]
0 1 2 3 4
0
5
10
t[sec]cour
ants
tato
rique
[A]
0 1 2 3 4
0
0.5
1
1.5
t[sec]
Flu
xro
toriq
ue[W
b]
0 1 2 3 40
50
100
150
t[sec]
vite
sse
[rd/
Sec
]
0 1 2 3 4
0
20
40
t[sec)
coup
leC
em[N
.m]
f lux-qr
flux-dr
ids
iqs

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 79 2008/2009
Il est clair que le contrôle vectoriel de la machine à induction offre des performances decontrôle semblables à celles de la machine à courant continu à excitation séparée àcondition que la constante de temps rotorique soit parfaitement connue. Ces stratégies decommande vectorielle sont plus précises mais leur implémentation nécessite l’acquisition d’un matériel assez coûteux.Cependant, elles sont sensibles aux variations des paramètresde la machine. L’échauffement et la saturation de la machine peuvent être la cause d’un déréglage de l’opération de découplage introduisant ainsi des erreurs dans les valeurs estimées du flux et de sa position et par conséquent l’orientation du flux est déviée figure 3.32.. Les régulateurs PID classiques ne répondent plus aux performances souhaitées. Laconception de régulateurs robustes permettant l’adaptation de l’opération de découplage en cas de variation des paramètres de la machine est nécessaire.
Fig3.31 Commende vectorielle indirecte de la MAS alimentée par unonduleur à hystérésis
0 0.5 1 1.5 2 2.5
-100
0
100
t(sec)
vite
sse
(rad
/sec
)
t(sec)
t(sec) t(sec)
0 0.5 1 1.5 2 2.5
0
0.5
1
ph-qr
com
p-flu
xro
toriq
ue(W
b)
ph-dr
ph-dr
0 0.5 1 1.5 2 2.5
-20
-10
0
10
20
30
coup
leC
em(N
m)
0 0.5 1 1.5 2 2.5
-5
0
5 Ids
Com
p-co
uran
tsta
toriq
ue(A
)
Iqs
0 0.5 1 1.5 2 2.50
50
100
150
vitess
e(rad
/sec
)
t(sec)
0 0.5 1 1.5 2 2.5
0
0.5
1
1.5
Com
posa
ntes
flux
roto
rique
(Wb)
t(sec)
f lux-dr
f lux-qr
0 0.5 1 1.5 2 2.5
-10
-5
0
5
10
cour
ants
tatoriq
ue(A
)
t(sec)
Fig 3.32 Réponses de la commande vectorielle à une variation de larésistance rotorique (2*Rn)

Commande vectorielle de la machine asynchrone
Dr A. Meroufel 80 2008/2009
3.10 Adaptation paramétriquePlusieurs travaux ont été proposés pour la correction de la constante de temps rotorique. Larecherche bibliographique effectuée dans ce contexte a montré que l’identification ou l’estimation de la constante de temps est un problème crucialpour la commande indirecte àflux orienté. En outre, il est à remarquer que l’application des techniques de l’intelligence artificielle permet de résoudre le problème soulevé sans pour autant nécessiter la connaissancedes paramètres du système
3.11 Interprétation des résultats
Les différentes réponses montrent que le flux et le couple sont découplés. Le flux r est orienté dans la direction « d » Les réponses (vitesse, flux, couple, courant) statiques et dynamiques sontsatisfaisantes. La commande vectorielle avec MLI vectorielle présente moins d’harmoniques donc moins de pertes joules
3.12 Conclusion
Dans ce chapitre, nous avons présenté la commande vectorielle directe et indirecte associée àun onduleur à MLI triangulo-sinusoidale, à MLI vectorielle et à hystérésis.La commande à flux orienté associée à un onduleur à MLI vectorielle présente de bonnesperformances.La technique de commande vectorielle nécessite :
Une bonne connaissance de s, ce qui impose généralement un capteur de grandeurmécanique pour déterminer la vitesse .
Un modèle complet de la machine pour estimer r, ce qui entraîne une fortedépendance vis-à-vis des paramètres de la machine.
D’autre part, le contrôle du couple est effectuépar l’intermédiaire du contrôle des courants etpar conséquent les performances dépendent du réglage des courants.
Ces contraintes sur le contrôle vectoriel à flux orienté ont donc conduit à d’autres solutionspour commander le couple des machines asynchrones. Ainsi, le chapitre suivant sera consacréà une technique de contrôle direct du couple par action sur l’état de commutation de l’onduleur.

Commande directe du couple
Dr A. Meroufel 2008/200981
Commande directe du couple
4.1 IntroductionLa structure du contrôle direct du couple (DTC) de la machine asynchrone a été introduite en1985 par I. Takahashi . Puis, plusieurs études ont permis de développer avec exactitude laconnaissance de cette commande.Dans ce chapitre, nous présentons les principes du contrôle direct du couple, nous analyseronsen particulier, le couplage et la dynamique du contrôle entre le flux statorique et le coupleélectromagnétique.Nous développons, l’estimation des deux grandeurs de contrôle qui sont le flux et le couple.Puis, nous élaborerons le modèle des contrôleurs à hystérésis impliqués dans les structuresgénérales de la commande.Nous analyserons d’autres structures de DTC telle que le décalagede zone et l’augmentationdu nombre de zonesDes résultats de simulation viendront mettre en évidence les performances du contrôle directdu couple électromagnétique.
4.2 Principes généraux sur la DTC
La commande directe du couple d’une machine asynchrone est basée sur la détermination« directe» de la séquence de commande appliquée aux interrupteurs d’un onduleur de tension. Ce choix est généralement basé sur l’utilisation des régulateurs à hystérésis dont la fonctionest de contrôler l’état du système, à savoir ici l’amplitude du flux stator et du couple électromagnétique. Ce type de commande est classé dans la catégorie des contrôles enamplitude, par opposition aux lois de commandes en durée plus classiques qui sont basées surun réglage de la valeur moyenne du vecteur tension par modulation de largeur d’impulsion (MLI).
A l’origine, les commandes DTC étaient fortement basées sur le «sens physique » et sur uneapproche relativement empirique de la variation des états (couple, flux) sur un intervalle detemps très court (intervalle entre deux commutations). Ce raisonnement s’est nettement affiné et repose désormais sur des fondements mathématiques de plus en plus solides.
4.2.1 Modélisation vectorielle de la machine et du convertisseur
Les conditions de contrôle dynamique du couple de la machine asynchrone peuvent être misesen évidence, par le modèle vectoriel de la machine. Pour cela, on prendra les expressionsvectorielles de la machine. Par la suite, on se placera dans le référentiel statorique (S), quel’on définira par un système d’axes lié au stator ( ). De plus, de manière à simplifierl’écriture des grandeurs exprimées dans le référentiel (S), on choisira la notationsuivant : ySy XX )( . Ainsi, les tension dela machine, côté stator et rotor, peuvent s’écrire:Côté stator :
dtd
IRV ssss
(4.1)
Côté rotor :
rrs
rr jdt
dIR
0 (4.2)

Commande directe du couple
Dr A. Meroufel 2008/200982
Le vecteur tension sV est délivré par un onduleur de tension triphasé, dont l’état desinterrupteurs, supposés parfaits, est représenté en théorie par trois grandeurs booléennes decommande cbajS j ,, telles que :
1jS : interrupteur haut fermé et interrupteur bas ouvert.
0jS : interrupteur haut ouvert et interrupteur bas fermé.
Ainsi, le vecteur tension sV peut s’écrire sous la forme:
3
43
2
32
j
c
j
baCs eSeSSUV (4.3)
Les combinaisons des trois grandeurs cba SSS permettent de générer huit positions duvecteur sV dont deux correspondent au vecteur nul : 000111 ouSSS cba , comme lemontre la figure (4.1)
4.2.2 Contrôle du vecteur flux statorique
A partir del’expression 4.1 de la tension statorique dans le référentiel (S), on obtient :
dtIRVtt
ssss 0
)( (4.4)
Fig 4.1 Elaboration des vecteurs cbas SSSV à partir de l’onduleur de tension
)011(V1
)010(V6
)110(V5
)100(V4
)101(V3
)111(V0
s
s
)110(V2
1
0
)000(V0
1
1
1
1
11
1
0
00
0
0
0
0

Commande directe du couple
Dr A. Meroufel 2008/200983
Sur un intervalle périodique de contrôle eT,0 , correspondant à une périoded’échantillonnage eT , les commandes cba SSS sont fixes. Ainsi on peut écrire :
dtIRtVtt
sssss 00)( (4.5)
Où 0s est un vecteur flux à t =0, et avec l’hypothèse que la résistance sR reste constate.
Si pour simplifier, on considère le terme ss IR comme négligeable par rapport à la tension sV(ce qui est vérifié lorsque la vitesse de rotation est suffisamment élevée), on constate que surl’intervalle de temps eT,0 , l’extrémité du vecteur s se déplace sur une droite dont la
direction est donnée par sV . La figure 4.2 décrit ce principe, lorsque l’on sélectionne par
exemple une tension 3VVs .
En choisissant une séquence correcte de vecteur sV , sur des intervalles de temps successifs de
durée eT , on peut donc faire suivre à l’extrémité du vecteur s la trajectoire désirée. Il est
possible de fonctionner avec un module du flux s pratiquement constant. Pour cela, il suffit
de faire suivre à l’extrémité de s une trajectoire presque circulaire, si la période eT est très
faible devant la période de rotation du flux statorique eT . Lorsque le vecteur tension sV est
non nul, la direction du déplacement de l’extrémité du flux s est donnée par sa dérivée
dtd s , correspondant à la force électromotrice sE .
En supposant le terme ss IR comme négligeable, on montre que le vecteurdt
d s est
pratiquement égal au vecteur sV , comme le représente la figure 4.3. Ainsi, la « vitesse » de
déplacement de l’extrémité du flux s est donnée par l’amplitude de la dérivée du vecteur
1V
3V
4V
2V
5V 6V0t
eTt
3VVs
so
s
s
s
s
Fig4.2Exemple de l’évolution de l’extrémité de s pour ss IR négligeable

Commande directe du couple
Dr A. Meroufel 2008/200984
flux ss V
dtd
, qui égal à CU32
. Le déplacement du flux statorique correspond à la
dérivée angulairedt
d s .
L’extrémité du flux statorique suit la direction donnée par la force électromotricedt
d s . Sur la
figure 4.3, on a représenté trois directions possibles de ce vecteur flux s
. Ainsi, on peut voir
que pourdt
d s donné, ledéplacement de l’extrémité du flux statorique est maximal, si la force
électromotricedt
d s est perpendiculaire à la direction du vecteur s. Par contre, dans le cas,
où la force électromotrice est décalée par rapport à la perpendiculaire de s ( 1 en avant
ou 2 en arrière), on observe un ralentissement du déplacement de l’extrémité du flux s. De
même, on relève que la « vitesse» de déplacement de l’extrémité du flux sest nulle, si l’on
applique un vecteur tension nul (cas où terme ss IR est négligé).
4.2.3 contrôle du couple électromagnétique
Pour exposer qualitativement les principes du contrôle du couple, il est commande desupposer pour simplifier, qu’en régime établi, à une vitesse po0 donnée, le vecteur
flux stourne avec une amplitude constate 0s
, à une vitesse de rotation moyenne 0s . On
s
s
s
s
2
1
2
1
ss
dtd
j
sjs edt
dj
sV dt
d s
Direction dudéplacement de
l’extrémité de s
Fig4.3 composantes du vecteur flux statorique dérivé

Commande directe du couple
Dr A. Meroufel 2008/200985
supposera également que le vecteur flux rotorique r conserve une amplitude constante ettourne à la même pulsation moyenne 0s que le vecteur flux s.Pour un instant 0t donné, on pose :
0
0
00
00
r
s
irr
iss
e
e
(4.6)
On a alors :
00
0
rs
t
r jdt
d
(4.7)
En reportant (4.6) dans l’expression de la tension côté rotor (4.2), on obtient :
0
0
022201
1
js
sr e
TLM
rs
(4.8)
En posant :
)T(Arectg r0r0r0s0 (4.9)
Et :
2r
220r
r0r0
2r
220r
0
T1
Tsin
T1
1cos
(4.10)
A partir de l’expression générale du couple électromagnétique (1.18) et des relations (4.11) et(4.12) liant les flux et les courants,
rsss IMIL (4.11)
srrr IMIL ˆ (4.12)
On peut établir une équation du couple en fonction du flux rotorique et statorique, soit :
*rs
rsem Im
LLM
PC
(4.13)
Par conséquent, en reprenant les conditions exposées précédemment à l’instant0t , le coupleélectromagnétique de l’expression (4.13) peut s’écrire sous forme suivant:

Commande directe du couple
Dr A. Meroufel 2008/200986
00r0srs
0 sinLL
MPC
(4.14)
A l’instant 0t et en appliquant un vecteur sV adéquat, on impose à la vitesse de rotation de s
un échelon de pulsation 1s . Immédiatement après 0t , on peut noter une modification desexpressions du flux statorique et rotorique (4.6), soit :
rrr
sss
jrr
jrr
js
jss
ee
ee
0
0
0
0(4.15)
Avec :
010 ttsss (4.16)
La figure 4.4 montre l’évolution des flux statorique et rotorique après un échelon de pulsation 1s .
De l’expression du flux rotorique (4.15), on peut en déduire la relation de la dérivée de cettegrandeur par rapport au temps, soit :
rrjrr
dtd
jedt
ddt
dr
(4.17)
Avec : sr (4.18)
En introduisant les équations données par (4.15) et (4.17)dans l’expression de la tension côté rotor (4.2), on obtient la relation suivante :
0j0s
sr
rr0r
rr0r0
s
eLM
T1
dtd
)(T1
)(dt
ddt
dj
(4.19)
0ss
s
0r0
0s0r
ss
s
r
0
1s0s
0s
1s0ss
Fig4.4 Evolution des flux set raprès un échelon de pulsation .1s

Commande directe du couple
Dr A. Meroufel 2008/200987
En séparant partie réelle et imaginaire et en appliquant les approximations des petits signaux,on peut écrire
000
000
cossin)sin(
sincos)cos(
(4.20)
On relève donc :
00000
0000
cossin1
sincos11
ssr
rrss
ssr
rrr
r
LM
Tdtd
dtd
LM
TTdtd
(4.21)
Un développement de calcul conduit à :
rs
r
r
ss
r
rr
r
rr
r
Tdtd
Tdtd
0
0
0
01
000
1
1
(4.22)
Un simple examen des deux équations différentielles permet de prévoir immédiatement après0t surquelques périodes d’échantillonnage0T , respectant la condition suivante :
re TT (4.23)
On obtient les relations suivantes :
01
0tts
r
(4.24)
On montre donc que le vecteur flux r continue de tourner à la pulsation 0s en conservantla même amplitude 0r . On peut noter que cette amplitude va tendre progressivement à varieren sens contraire de .Ainsi, immédiatement après 0t , l’expression du couple (4.14) est modifiée et peut s’écrire sous la forme suivante :
000 sinrsrs
em LLM
PC (4.25)

Commande directe du couple
Dr A. Meroufel 2008/200988
Ce qui peut également s’écrire:
01000000 cossin ttLL
MP
LLM
PC srsrs
rsrs
em
(4.26)
Et :
10 CCCem (4.27)
Les variations du couple peuvent donc être, dans ces conditions contrôlées uniquement àpartir de la vitesse de rotation s, comme le présentent les figures 4.5, (a) et (b).Si la condition 01s est respectée, alors on observe une croissance du coupleélectromagnétique, comme le montre la figure 4.5, (a).Si l’échelon de pulsation respecte la condition 01s ; alors le couple électromagnétique
décroît avec comme cas extrême 0s1s lorsque la rotation du flux s est arrêtée parapplication d’un vecteur nul. Ce cas est représenté sur la figure4.5 (b).
4.3 Description de la structure du DTC
4.3.1 Sélection du vecteur tension sV
En sélectionnant un vecteur cbas SSSV approprié, l’extrémité du flux s peut être contrôléeet déplacée de manière à maintenir l’amplitude du flux à l’intérieur d’une certaine fourchette.Le choix de sV dépend alors de la variation souhaitée pour le module du flux statorique s,
du sens de rotation de s mais également de l’évolution souhaitée pour le couple. Ainsi, nous
pouvons délimiter l’espaced’évolution de s dans le référentiel S en le décomposant en sixzones i , avec 6,1i déterminées à partir des composantes du flux sur les axes s et s . L’axe d étant choisi confondu avec l’axe du bobinage a de l’enroulement triphasé cba ,, .
t
Pente= 01s
emC
0C
10 CC
Fig4.5 Progression du couple emC
Pente= 01s
emC
0C
10 CC
t
(a) (b)

Commande directe du couple
Dr A. Meroufel 2008/200989
Lorsque le vecteur flux s se trouve dans une zone numérotée i , le contrôle du flux et ducouplepeut être assuré en sélectionnant l’un des quatre vecteurs tension adéquats.
Il s’agit des vecteurs 2211 ,,, iiii VVVV représentés sur la figure 4.6. Sur toute la Zone i ,
parcourue par le vecteur flux statorique, le rôle du vecteur tension sV sélectionné reste lemême soit :
Si 1iV est sélectionné alors s croît et emC croît
Si 1iV est sélectionné alors s croît et emC décroît
Si 2iV est sélectionné alors s décroît et emC croît
Si 2iV est sélectionné alors s décroît et emC décroît
Quel que soit le sens d’évolution du couple ou du flux, dans une zone de position iN , lesdeux vecteurs iV et 3iV ne sont jamais utilisés. Ce qui signifie que lors du déplacement duflux sur une zone iN , un bras de l’onduleur ne commute jamais et permet ainsi de diminuer la fréquence de commutation moyenne des interrupteurs du convertisseur.
A présent que les principes du contrôle direct du couple ont été décrits dans leur ensemble, onpeut élaborer les différents contrôleurs adaptés à notre système.
4.3.2 Estimation du flux statorique
Fig4.6 Sélection du vecteur tension selon la zone iN
23
4
5 6
1iV
1iV
2iV
2iV
iV3iVs
s
s décroît
emC décroît
s croît
emC décroît
s croît
emC croît
s décroît
emC croît
1iN1

Commande directe du couple
Dr A. Meroufel 2008/200990
Avant d’aborder l’étude du contrôleur du flux, on définit les étapes de calcul nécessaires à l’estimation de l’amplitude flux statorique. Ainsi, à partir de l’expression (4.5), on établira ladécomposition du vecteur flux s, suivant les axes ss , , soit :
sss j (4.28)
t
ssss
t
ssss
dtIRV
dtIRV
0
0
(4.29)
On obtient les tension composées sV et sV , de sV , à partir de la tension d’entréemesurée de
l’onduleur CU , des états de commande cba SSS , et en utilisant la transformation deConcordia, on obtient :
qsdss jVVV (4.30)
CbCqs
CbaCds
SSUV
SSSUV
21
21
32
(4.31)
Les courants sI et sI sont également obtenus par transformation de Concordia, à partir des
courants asI , bsI et csI mesurés, soit :
sss jIII (4.32)
csbss
ass
III
II
21
32
(4.33)
Le module du flux statorique s’écrit:22sss (4.34)
4.3.3 Elaboration du contrôleur de flux
De manière à obtenir de très bonnes performances dynamiques, le choix d’un correcteur à hystérésis à deux niveaux semble être la solution la plus simple et la mieux adaptée à lacommande étudiée. En effet, avec ce type de contrôleur, on peut facilement contrôler et

Commande directe du couple
Dr A. Meroufel 2008/200991
maintenir l’extrémité du vecteur flux s dans une couronne circulaire, comme le montre lafigure 4.7, (a)
La sortie du contrôleur de flux, donnée par la grandeur booléen flxC , indique les dépassementsupérieur et inférieur de l’amplitude du flux, comme le montre la figure 4.7, (b).
Ainsi, le comparateur à hystérésis à deux niveaux, appliqué sur le flux, permet de détecter lesdépassements de la zone de contrôle et de respecter sref
, avec ref la consigne de
flux et l’écart d’hystérésis du contrôleur.
4.3.4 Estimation du couple électromagnétique
A partir de l’expression du couple électromagnétique, élaborée au premier chapitre, on peutestimer le couple emC uniquement à partir des grandeurs statoriques flux s , s et
courants sI , sI . En développant la relation (1.18) , on obtient alors la forme suivante ducouple :
ssss IIPCem (4.35)
4.3.5 Elaboration du contrôleur de couple
Dans l’étude du contrôleur, appliqué au couple, deux types de comparateurs à hystérésispeuvent être envisagés pour obtenir la dynamique souhaitée sur le couple, soit :
Un comparateur à hystérésis à 3 niveaux. Un comparateur à hystérésis à 2 niveaux.
(S)Ref - S
N=2N=3v4
v3
v6
v1
v5
v4 v5
v5
v6
v6
v1
v2
v2
v3
N=6N=5
v4
N=1N=4 v2
v3
v1
1
23
4
5 6
cflx
S
S
(S)Ref
-S
1
0
+S0
Sens deRotation
de S
Fig4.7 (a) : Sélection des tensions sV correspondant au contrôle de l’amplitude s(b) : Contrôleur à hystérésis à deux niveaux.
(b)(a)

Commande directe du couple
Dr A. Meroufel 2008/200992
4.3.5.1 Comparateur à trois niveaux
Le comparateur à trois niveaux permet de contrôler le moteur dans les deux sens de rotation,soit pour couple positif, soit pour couple négatif. La figure 4.8 montre l’état de sortie logique Ccpl du comparateur suivant l’évolution du couple électromagnétique emC par rapport au
signe du couple de référence refC .Lorsque le couple doit être augmenté et que la consigne de couple est positive, la sortie ducontrôleur Ccpl est égale à 1. Inversement si elle est négative Ccpl est égal à -1. Dans le casoù l’état de sortie du comparateur Ccpl est égal à 0, le couple doit être diminué.
Ainsi, on montre comment le comparateur à hystérésis à trois niveaux permet de respecter lacondition ememref CCC
, avec l’écart d’hystérésis, comme le montre la figure 4.8.
On s’est placé ici, dans le cas où la pulsation statorique s est positive et le vecteur flux
statorique s est en avance sur le flux rotorique r.Le correcteur à hystérésis à trois niveaux autorise une décroissance rapide du coupleélectromagnétique. En effet, pour diminuer la valeur du couple, en plus des vecteurs nuls, onpeut appliquer les vecteurs 1iV et 2iV , si l’on choisit le sens trigonométrique comme sens de
rotation du moteur. Dans ce cas, le vecteur flux rotorique r rattrape le flux s, lorsque cedernier est à l’arrêt ou se déplace en sens inverse de rotation du moteur.Le comparateur àhystérésis à trois niveaux permet la possibilité de fonctionner dans les 4 quadrants sansintervention sur la structure de commande du moteur. De plus, il permet à l’un des bras de
0 0 0 0 0 0 01 1 1 1 1 1
-1 -1 -1 -1 -10 0 0 0
0
t
0refC0refC
emC
emC
emref CC
Ccpl
emref CC
emC
emC
1
-1
Fig4.8contrôle du couple électromagnétique à l’aide d’un comparateur à hystérésis trois niveaux

Commande directe du couple
Dr A. Meroufel 2008/200993
l’onduleur de commuter beaucoup mois souvent que les deux autres, sur une zone dedéplacement du flux s. L’onduleurpeut donc avoir, en cours de fonctionnement, des phasesde mise en vielle des interrupteursd’un bras du convertisseur.
4.3.5.2 Comparateur à deux niveaux
Ce correcteur diffère du précédent par la plus grande simplicité de son application. Il se réduitau contrôle du couple sur un sens de rotation du moteur. Ainsi, seul les vecteurs 1iV et 2iV
peuvent être sélectionnées pour faire évoluer le vecteur flux s. Par conséquent, la diminutiondu couple est uniquement opérée par l’application de vecteur nuls.Par contre, ce correcteur nepermet pas d’inverser le sens de rotation du flux s. Ainsi, pour aller en « marche arrière » onimpose un croisement des phases du moteur.
4.3.5.3 Choix du contrôleur de couple
L’utilisationde la structure de commande pour des applications de type traction permet dechoisir un comparateur à hystérésis à deux niveaux pour le correcteur de couple. En effet,dans ce cas, seuls deux quadrants sont utilisés à la fois.La grande simplicité de l’implantation de cet outilde contrôle est également un élémentimportant dans le choix du comparateur à deux niveaux. De plus, les considérationsénergétiques sur le convertisseur imposent un nombre restreint de commutation. Or, pour unemême largeur d’hystérésis de contrôle, le comparateur à deux niveaux nécessitera un nombre moins élevé de commutations.
4.3.6 Table de vérité et structure du DTC
4.3.6.1 Elaboration de la table de vérité
On élabore la table de vérité de la structure de contrôle, en fonction des sorties des contrôleurs
flxC et Ccpl et des zones N de position s, tel que.
s
sgArc
tan (4.36)
Comme le montre le tableau1L’espace d’évolution de s dans le référentiel considéré se décompose en 6 zones N (1,….6)Ce choix est dicté par souci d’un contrôle plus rigoureux, et tel que:
3
163
16
NNN (4.37)
On retrouve bien avec la table de vérité (tableau 1), la formulation de sélection des vecteurstensions 1iV , 1iV , 2iV , 2iV correspondant à une zone iN et ceci pour un comparateur àhystérésis à deux ou à trois niveaux.

Commande directe du couple
Dr A. Meroufel 2008/200994
En sélectionnant l’un des deux vecteurs nuls 0V
ou 7V , la rotation du flux s est arrêtée et
entraîne une décroissance du coulpe emC . On choisit alternativement 0V ou 7V de manière àminimiser le nombre de commutation sur l’onduleur.
4.3.6.1 Structure générale du contrôle direct du couple
La structure complète de la commande, est représentée sur la figure 4.9.
Transformationde Concordia
Triphasé/Biphasé
Estimation duflux Statorique et
du couple
MAS
Onduleurde tension
à 2-niveaux
Tableau deCommutation
(Tableau1)
+-
1-
asVbsVasIbsI
sI sIsV sV
ss
,
s
*s
*emC
0
1
-1
0 emC
Ccpl
flxC
N
6,.....,1
cU
Fig 4.9 Schéma de la structure générale du contrôle direct du couple(DTC Classique)
Tabeau 1
N 1 2 3 4 5 6 Comparateur
1flxC
1Ccpl 2V 3V 4V 5V 6V 1V 2
niveaux
3
niveaux
0Ccpl 7V 0V 7V 0V 7V 0V
1Ccpl 6V 1V 2V 3V 4V 5V
0flxC
1Ccpl 3V 4V 5V 6V 1V 2V 2
niveaux
3
niveaux
0Ccpl 0V 7V 0V 7V 0V 7V
1Ccpl 5V 6V 1V 2V 3V 4V

Commande directe du couple
Dr A. Meroufel 2008/200995
1
Fig 4.10 DTC modifiée par un décalage des zones
2
3
6
5
41
4.5 Amélioration de la commande DTC
Le but de cette section est d’améliorer la commande directe du couple classiquesurtout au niveau de la réduction des ondulations du couple électromagnétique et du fluxstatorique et pour la maîtrise de la variation de la fréquence de commutation.Il existe plusieurs types d’amélioration de la DTC classique présentés dans la littérature. On achoisi d’exposer deux approches définies par l’utilisation d’autres types de structures de la DTC :
Décalage zonal Augmentation du nombre des zones
4.4.1 Décalage des zones
La première stratégie est basée sur un décalage zonal de la DTC classique parchangement de la table de commutation et de la modification des zones. Au lieu de prendre lepremier secteur de -30° à 30° comme il est montré dans la figure 4.6, il faut le prendre de 0° à60° ce qui caractérise une nouvelle partition des zones définie dans la figure 4.10.
Ce type de contrôle, défini par un décalage des zones, permet un bon fonctionnement à bassevitesse.
4.4.2 Augmentation du nombre des zones
Danscette section, la DTC modifiée, qu’on va utiliser est basée sur une nouvelletable devérité. Cette dernière utilise 12 secteurs au lieu de six comme la montre la figure 4.11.
1
Fig 4.11 DTC avec 12 secteurs
12
1011
98
7
6
5 234

Commande directe du couple
Dr A. Meroufel 2008/200996
4.4.3 Onduleur à 3 niveaux de tension de type NPC
Le schéma général d’un onduleur à 3 niveaux de tension de structure dite à point neutre « clamp » (NPC) est donné par la figure 4.12.
Par combinaison des quatre interrupteurs (considérés parfaits) d’un même bras, on peut imposer à la phase trois niveaux de tensions différentes :
2
0,0,1,1
00,1,1,02
1,1,0,0
c
c
U
U
(4.38)
On définit alors trois grandeurs booléennes de commande cbaiS i ,, , telles que.
0,0,1,1S,S,S,S1S
0,1,1,0S,S,S,S0S
1,1,0,0S,S,S,S1S
4i3i2i1ii
4i3i2i1ii
4i3i2i1ii
(4.39)
De ce fait, et contrairement à l’onduleur à 2-niveaux qui ne peut fournir que huit vecteurs detensiondont deux nuls, l’onduleur à 3-niveaux peut produire 27 vecteurs de tension dont troisnuls figure 4.13.
Fig 4.12schéma de l’onduleur à 3-niveaux de tension de type NPC
2cU
U
O Phase a Phase b Phase c
2C
1C
1aS
2aS
3aS
4aS
1bS
2bS
3bS
4bS
1cS
2cS
3cS
4cS
2cU
U
-
-

Commande directe du couple
Dr A. Meroufel 2008/200997
5V
4V
1470 ,, VVV
Fig4.13Vecteurs de tension fournis par l’onduleur à 3-niveaux de tension
2V
6V
3V
1V
8V
9V
10V
11V
12V
13V
15V
16V
17V
18V
19V
20V
26V
25V
24V
23V
22V
21V
2U32
c
2U32
c
Tableau 2Répartition en 4 groupes des vecteurs de tension de l’onduleur à 3-niveaux de tension.
L’expression du vecteur de tension de l’onduleur sV correspondant aux 19 valeurs
différentes du vecteur de tension sV , peut se décomposer en quatre groupes, comme le montrele tableau 2.
‘’ Tensionnulle‘’
0V 7V 14V(0, 0,0) (1, 1,1) (-1,-1,-1)
‘’ DemieTension‘’
1V 2V 3V 4V 5V 6V(1, 0,0) (1, 1,0) (0, 1,0) (0, 1,1) (0, 0,1) (1, 0,1)
8V 9V 10V 11V 12V 13V(0,-1,-1) (0, 0,-1) (-1, 0,-1) (-1, 0,0) (-1,-1,0) (0, -1,0)
‘’ PleineTension‘’
15V 16V 17V 18V 19V 20V(1,-1,-1) (1, 1,-1) (-1, 1,-1) (-1, 1,1) (-1,-1,1) (1, -1,1)
‘’ Tension intermédiaire‘’
21V 22V 23V 24V 25V 26V(1, 0,-1) (0, 1,-1) (-1, 1,0) (-1, 0,1) (0,-1,1) (1, -1,0)

Commande directe du couple
Dr A. Meroufel 2008/200998
Tableau 3 Calcul des vecteurs de tension
sV aov bov cov anv bnv cnv ),( sV
1V , 8V
U 0 0 2U/3 -U/3 -U/3 2( , 0 )
3U
2V
, 9V
U U 0 U/3 U/3 -2U/3 2( , 60 )
3U
3V
10V
0 U 0 3/U 2U/3 3/U 2( ,120 )
3U
4V
, 11V 0 U U -2U/3 U/3 U/3 2
( ,180 )3
U
5V
12V
0 0 U -U/3 -U/3 2U/3 2( , 240 )
3U
6V
13V
U 0 U U/3 -2U/3 U/3 2( ,300 )
3U
15V
U -U -U 4U/3 -2U/3 -2U/3 2(2 , 0 )
3U
16V
U U -U 2U/3 2U/3 -4U/3 )60,32
2( U
17V
-U U -U -2U/3 4U/3 -2U/3 )120,32
2( U
18V
-U U U -4U/3 2U/3 2U/3 2(2 ,180 )
3U
19V
-U -U U -2U/3 -2U/3 4U/3 2(2 , 240 )
3U
20V
U -U U 2U/3 -4U/3 2U/3 2(2 , 300 )
3U
21V
U 0 -U U 0 -U ( 2 ,30 )U
22V
0 U -U 0 U -U ( 2 ,90 )U
23V
-U U 0 -U U 0 )150,2( U
24V
-U 0 U -U 0 U ( 2 , 210 )U
25V
0 -U U 0 -U U ( 2 , 270 )U
26V
U -U 0 U -U 0 ( 2 ,330 )U
0V
7V
14V
0 0 0 0 0 0 (0, 0 )
U U U 0 0 0
-U -U -U 0 0 0 (0, 0 ) (0, 0 )

Commande directe du couple
Dr A. Meroufel 2008/200999
L’espace d’évolution de s dans le référentiel considéré se décompose en 12 zones N (1,…., 12) ce choixest dicté par souci d’un contrôle plus rigoureux et tel que:
6
1126
112
NNN (4.40)
L’erreur entre la référence flux et sa valeur estimée, respectivement s
et s, sert
pour entrée à un comparateur à hystérésis à deux niveaux figure 4.14 (a). De même, l’erreur
emC entre la référence couple et sa valeur estimée, respectivement emC
et emC , sert pour
entrée à un comparateur à hystérésis à deux bandes supérieures et deux bandes inférieuresfigure 4.14 (b). La sortie de chaque comparateur, représentée par une variable signe Cflx(ou Ccpl)indique directement si l’amplitude du flux (ou du couple) doit être augmentée ou diminuée de façon à maintenir ces 2 grandeurs à l’intérieur des bandesd’hystérésis désirées
1emC , 2emC , s
(-2) grandeur fortement diminuer (-1) grandeur diminuer (0) maintenir (+1) grandeur augmenter (+2) grandeur fortement augmenter
De là, une nouvelle table 4 de commande est déduite donnant une relation directe entreflxCN , et Ccpl et les ordres de commutation cba SSS ,, de l’onduleur à 3-niveaux de tension
et les paramètre de sortie. Cette table est valable dans deux sens de rotation de la machine
Fig4.14 Blocsd’hystérésis
Cflx
srefss
s
s
+1
-1
0
Ccpl
emrefemc CCem
1emC0
+2
+1
-2
-1
2emC2emC 1emC
(a)(b)

Commande directe du couple
Dr A. Meroufel 2008/2009100
Tableau 4 Sélection des tensions sV cas d’un onduleur à 3-niveaux de tension
flxC Ccpl
N
1 2 3 4 5 6 7 8 9 10 11 12
+1
+2 21V 16V 22V 17V 23V 18V 24V 19V 25V 20V 26V 15V
+1 21V 2V 22V 3V 23V 4V 24V 5V 25V 6V 26V 1V
0 Vecteur nul
-1 26V 1V 21V 2V 22V 3V 23V 4V 24V 5V 25V 6V
-2 26V 15V 21V 16V 22V 17V 23V 18V 24V 19V 25V 20V
-1
+2 17V 23V 18V 24V 19V 25V 20V 26V 15V 21V 16V 22V
+1 3V 23V 4V 24V 5V 25V 6V 26V 1V 21V 2V 22V
0 Vecteur nul
-1 5V 25V 6V 26V 1V 21V 2V 22V 3V 23V 4V 24V
-2 19V 25V 20V 26V 15V 21V 16V 22V 17V 23V 18V 24V
0
+2 22V 17V 23V 18V 24V 19V 25V 20V 26V 15V 21V 16V
+1 22V 3V 23V 4V 24V 5V 25V 6V 26V 1V 21V 2V
0 Vecteur nul
-1 25V 6V 26V 1V 21V 2V 22V 3V 23V 4V 24V 5V
-2 25V 20V 26V 15V 21V 16V 22V 17V 23V 18V 24V 19V
La structure complète du contrôle direct du couple d’une MAS alimentée par un onduleurà 3-niveaux de tension, est représentée sur la figure 4.15.

Commande directe du couple
Dr A. Meroufel 2008/2009101
Le comparateur à hystérésis à trois niveaux est représenté par la figure 4.16
Transformation deConcordia
Triphasée/Biphasée
Estimation duflux statorique et
du couple
MAS
Onduleurde tension
à 3-niveaux
Tableau deCommutation(Tableau 4)
+-
-
asVbsVasIbsI
sI sIsV sV
ss
,
s
*s
*emC
1
-1
0
emC
Ccpl
flxC
N
12,.....,1
cUTensionContinue
+1
-1
0
+2
-2
Fig4.15 Schéma de la structure générale DTC avec onduleur à3-niveaux
0 0 0 0 0 0 0
1 1 1 1 1 1-1 -1 -1 -1 -1
0 0 0 0
0
t
0refC0refC
emC
emC
emref CC
Ccpl
emref CC
emC
emC
1
-1
Fig 4.16 Contrôle du couple électromagnétique à l’aide d’un comparateur à hystérésis à trois niveaux

Commande directe du couple
Dr A. Meroufel 2008/2009102
4.5 Simulation DTC classiqueLe schéma bloc de simulation sous Matlab/Simulink est illustré par la figure 4.17
Les résultats de simulation sont représentés ci-dessous figures 4.18 et 4.19
Fig4.17 Schéma bloc de simulation de la commande direct du couple (DTC)
Vabc
iabc
Z
Ce-e
ph_r-e
Estimateur
flux et couple
Comparateur
couple
Comparateur
flux
Vc
wr
Cr
[S123]
[Wr]
[Vabc]
[Iabc]
[Vabc]
[S123]
[Iabc]
[Wr]
ControleurDTC
Cr
Va
Vb
Vc
Wr
Iabc
MAS
W_ref
ph_ref
0 0.5 1 1.5 2
0
20
40
t [Sec]
Cem
-est
[N.m
]
DC component = 10.21 , THD= 1.78%
0 0.5 1 1.5 20
0.5
1
DC component = 0.9892 , THD= 0.46%
t [Sec]
flux-
est[W
eb]
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
trajectoire du f lux statorique
0 0.5 1 1.5 2
-20
0
20
t [Sec]
Ias[A
]
Fundamental (50Hz) = 4.44 , THD= 54.64%
0 0.5 1 1.5-1
-0.5
0
0.5
1
t [Sec]
fluxstator
ique
[Wb]
0 0.5 1 1.5 2
-200
0
200
t [Sec]
Uas
[V]
0 10 20 30 40 500
50
100
150
200
Rang d'harmoniques
Fundamental (50Hz) = 205.3 , THD= 60.29%
Amplitu
desde
sha
rmon
ique
s[V
]
0 0.5 1 1.5 20
50
100
150
t [Sec]
Wr[rad
/Sec
]
0 0.050
50
100
150
Fig4.18 Réponses à une variation de vitesse

Commande directe du couple
Dr A. Meroufel 2008/2009103
Déc
alé
de15
°
07.0
01.0
em
s
Cet
0 0.5 1 1.5 2
0
20
40
t [Sec]
Cem
-est
[N.m
]
DC component = 10.22 , THD= 2.04%
0 0.5 1 1.5 20
0.5
1
DC component = 0.9917 , THD= 0.62%
t [Sec]
flux-
est[W
eb]
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
trajectoire du flux statorique
0 0.5 1 1.5 2
-20
0
20
t [Sec]
Ias
[A]
Fundamental (50Hz) = 4.466 , THD= 55.21%
0 0.5 1 1.5-1
-0.5
0
0.5
1
t [Sec]
flux
stat
oriq
ue[W
b]
0 0.5 1 1.5 2
-200
0
200
t [Sec]
Uas
[V]
0 10 20 30 40 500
50
100
150
200
Rang d'harmoniques
Fundamental (50Hz) = 196.4 , THD= 70.62%
Am
plitu
des
des
harm
oniq
ues
[V]
0 0.5 1 1.5 20
50
100
150
t [Sec]
Wr
[rad
/Sec
]
0 0.050
50
100
150

Commande directe du couple
Dr A. Meroufel 2008/2009104
Déc
alé
de30
°
07.0
01.0
em
s
Cet
0 0.5 1 1.5 2
0
20
40
t [Sec]
Cem
-est
[N.m
]
DC component = 10.21 , THD= 1.66%
0 0.5 1 1.5 20
0.5
1
ponent = 0.9998 , THD= 1.70%
t [Sec]
flux-
est[W
eb]
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
trajectoire du flux statorique
0 0.5 1 1.5 2
-20
0
20
t [Sec]
Ias
[A]
Fundamental (50Hz) = 4.625 , THD= 58.68%
0 0.5 1 1.5-1
-0.5
0
0.5
1
t [Sec]
flux
stat
oriq
ue[W
b]
0 0.5 1 1.5 2
-200
0
200
t [Sec]
Uas
[V]
0 10 20 30 40 500
50
100
150
200
Rang d'harmoniques
Fundamental (50Hz) = 214.5 , THD= 69.14%
Am
plitu
des
des
harm
oniq
ues
[V]
0 0.5 1 1.5 20
50
100
150
t [Sec]
Wr
[rad
/Sec
]
0 0.050
50
100
150

Commande directe du couple
Dr A. Meroufel 2008/2009105
Aug
men
tatio
ndu
nom
bre
des
zone
s(o
ndul
eurà
3-ni
veau
x)
3/7.0
17.0
2
01.0
em
em
s
C
Cet
Fig4.19 Réponses améliorées de la commande DTC
4.6 Interprétation des résultats
Les résultats montrent le bon fonctionnement de l’estimateur du flux et couple, ainsi que lesastuces pour réduire la déformation du flux surtout dans lecas d’un onduleur à 3-niveaux où iln’existe aucune déformation de flux (régime transitoire)avec moins d'ondulations au niveaudu couple et du flux. Les dépassements des bandes d’hystérésissont tout à fait logiques suiteau fonctionnement propre des comparateurs. Les réponses du couple électromagnétique et du
0 0.5 1 1.5 2
0
20
40
t [Sec]
Cem
-est
[N.m
]
DC component = 10.31 , THD= 3.82%
0 0.5 1 1.5 20
0.5
1
DC component = 0.9956 , THD= 0.79%
t [Sec]
flux-
est[W
eb]
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
trajectoire du flux statorique
0 0.5 1 1.5 2
-20
0
20
t [Sec]
Ias
[A]
Fundamental (50Hz) = 4.944 , THD= 57.55%
0 0.5 1 1.5-1
-0.5
0
0.5
1
t [Sec]
flux
stat
oriq
ue[W
b]
0 0.5 1 1.5 2
-200
0
200
t [Sec]
Uas
[V]
10 20 30 40 500
50
100
150
Rang d'harmoniques
DC component = 92.9 , THD= 194.28%
Am
plitu
des
des
harm
oniq
ues
[V]
0 0.5 1 1.5 20
50
100
150
t [Sec]
Wr
[rad
/Sec
]
0 0.050
50
100
150

Commande directe du couple
Dr A. Meroufel 2008/2009106
flux lors d’un changement des consignes nominales du couple etdu flux sont très rapides. Ladynamique de vitesse est très rapide avec un temps de réponse court. On peut égalementobserver l’établissement rapide du courant de ligne durant la phase de transition.
4.7 Conclusion
Le contrôle direct du couple d’une machine asynchrone apporte une solution satisfaisante auxproblèmes de la robustesse rencontrés dans les techniques de commande conventionnellesbasées sur l’orientation du flux rotorique.Cependant, elle présented’une part, une estimationdu flux statorique peu précise et d’autre part, une fréquence de commutation variable etdifficile à maîtriser du fait de l’utilisation des contrôleurs à hystérésis.
Dans ce chapitre, on a présenté aussi les différents aspects du contrôle direct du couple, telque :
Décalage zonal qui permet de corriger les ondulations observées sur le couple et leflux statorique.
Augmentation du nombre de zones
Une nouvelle table de commande valable quelque soit le sens de rotation de machine a étéproposée pour la DTC d’une machine asynchrone alimentée par un onduleur de tension à 3-niveaux de structure NPC. On peut affirmer que les avantages liés à l’utilisation de ce type d’onduleurs (et donc d’onduleurs à n-niveaux) sont nombreux, on peut citer entre autre,l’augmentation de la puissance de l’installation, la diminution des sollicitations et de lafréquence de commutation des interrupteurs de puissance et l’amélioration des formesd’ondes des grandeurs de sortie.Donc, il est intéressant d’associer les avantages offerts par les onduleurs multiniveaux de tension et ceux apportés par la commande de type DTC. Cecouplage permet d’envisager la minimisation des contraintes ‘technologiques etenvironnementales’ par une meilleure maîtrise de la fréquence de commutation.
La partie suivante fera l’objet de certains travaux consacrés à l’obtention d’une meilleuremaîtrise de la fréquence de commutation des interrupteursde l’onduleuret par conséquent uneréduction des ondulations et une amélioration de la DTC.
4.8 Nouvelles stratégies de contrôle de type DTC
Dans ce chapitre, nous présentons une amélioration du la commande DTC pour toutes lesplages de variation de la vitesse (faible, moyenne, élevée). Pour cela, nous développons, deuxautres méthodes de contrôle direct du couple.La première partie est consacrée à l’application de la MLI discrétisée ou DSVM_DTC (Discrete Space Vector Modulation for Direct Torque Control) pour la commande directe ducouple (DTC). La deuxième partie est réservée à la commande directe du couple par latechnique MLI vectorielle (DTC-SVM).Les résultats de simulation de ces différentes méthodes de commande viendront mettre enévidence les performances du contrôle direct du couple et du flux surtout en basse vitesse.
4.8.1 Commande DTC par MLI vectorielle discrétisée (DSVM_DTC)
Cette partie présente une amélioration de la commande DTC. La commande est appeléeDiscrete Space Vector Modulation - DTC ou tout simplement DSVM. Elle analyse leproblème des fluctuations introduites au niveau du couple et du flux dans la DTC classique.

Commande directe du couple
Dr A. Meroufel 2008/2009107
Le nom DSVM provient du fait que chaque période d'échantillonnage est divisée en troisintervalles de temps égaux de sorte à produire la technique MLI vectorielle. Ainsi, le nombrevecteurs de tension augmentent d’où une amélioration de la trajectoire du vecteur flux et par conséquent une réduction des ondulations. Le système de contrôle utilise des tablesprédéfinies pour chaque niveau de vitesse ce qui complique la simplicité de la DTCclassique.
4.8.1.1 Principe de la commande DSVM - DTC
La plupart des blocs existants dans La commande DSVM_DTC (figure 4.20) sontidentiques à ceux du contrôle par DTC classique. Les nouveaux blocs seront examinés ci-dessous.
4.8.1.2 Vitesse de la tension induite
Dans la DTC classique il y a une asymétrie dans le comportement du couple à cause de latension induite créée par la vitesse sous un flux constant. Le DSVM calcule cette tension etl'utilise pour choisir un vecteur tension. La plage d'accélération de zéro à l'endroit où latension induite est égale au vecteur tension appliquée est divisée en trois régions; faible,moyen et élevé.
élevé moyen faible moyen élevé
-1/6 0 1/6 1/2 1
sr
Fig4.21 Régions de vitesse de tension [p.u]
-1 -1/2
Transformation deConcordia
Triphasée/Biphasée
Estimation duflux statorique et
du couple
MASOnduleurde tension
Les tableaux deCommutation(Tableau 4)
+-
-
asVbsVasIbsI
sI sIsV sV
ss
,
s
*s
*emC
1
-1
0
emC
Ccpl
flxC
N
6,6.....,1,1
cUTensionContinue
+1
-1
0
+2
-2
Fig4.20 Schéma de la structure générale de la commande DSVM- DTC
r
s 1/2
r

Commande directe du couple
Dr A. Meroufel 2008/2009108
Fig4.23Blocs d’hystérésisde couple
Ccpl
emrefemc CCem
1emC
0
+2
+1
-2
-1
2emC
2emC1emC
La tension induite est
r , seulement sa valeur est utilisée donc la tension calculée est
srsV , (4.41)Elle est ensuite comparé aux régions.
4.8.1.3 Utilisation des secteurs
La commande DSVM_DTC utilise douze secteurs au lieu de six. Tous les six secteurs de lacommande DTC sont divisés en Moitié. Douze secteurs seront utilisés pour la gamme àgrande vitesse. Tandis que la gamme à faible et moyenne vitesse seulement six secteurs sontutilisés.
4.8.1.4 Comparateur à hystérésis du couple
La commande DSVM_DTC peut produire plusieurs vecteurs de tension, si ils sontcorrectement appliqués on aura moins ondulation dans le couple et le flux. Pour y parvenir,on utilise un comparateur à hystérésis à 5 niveaux au lieu de deux pour le couple.
-1
+1
-2
+2-3
+3
-4
+4
-5
+5 -6+6
Fig4.22 Secteurs de la DTC-DSVM

Commande directe du couple
Dr A. Meroufel 2008/2009109
Si l’erreur du couple est petite donc l’hystérésis est en état 0. Dans ce cas, un vecteur detension est choisi pour maintenir le couple à son niveau actuel. Si l'hystérésis est en état +1ou - 1, le vecteur choisi doit être moyen pour hisser le couple dans la petite région. Lorsquel'hystérésis est en état +2 ou - 2, le vecteur choisi pour compenser l'erreur du couple le plusvite possible doit être assez grand, c'est-à-dire le même vecteur utilisé dans la commandeDTC classique.
4.8.1.5 Tableaux de commutation
Dans ce type de commande la table de commutation a pour entrée quatre variables qui sontl’état hystérésis du flux, du couple, numéro du secteur et la tension induit par la vitesse. Étant donné que la commande choisit les vecteurs de tension en fonction de la tension induite doncchaque région de vitesse utilise une table de commutation correspondante. Lorsque lacommande fonctionne dans la région à vitesse élevée deux tableaux de commutations sontutilisés pour chaque secteur à cause d’une asymétrie introduite par la tension induite. Les tableaux de commutation utilisés dans ce cas sont aussi asymétriques. Pour la commande enbasse et moyenne vitesse un seul tableau est utilisé pour chaque secteur. Ainsi différentestables de commutation peuvent être utilisées selon le sens de rotation.
4.8.1.6 Onduleur de tension
En commande DSVM_DTC chaque période d'échantillonnage est divisée en trois intervallesde temps égaux. Dans chaque intervalle est appliqué soit un vecteur actif soit un vecteur nul.L'onduleur doit donc travailler à trois fois la fréquence d'échantillonnage ou utiliser lamodulation de largeur d'impulsion pour générer un vecteur..
Par exemple, le vecteur U223 est synthétisé par l'application U222 dans les deux premiersintervalles, puis U333.
Fig 4.24 Les vecteurs de DSVM dans secteur (+1,-1)

Commande directe du couple
Dr A. Meroufel 2008/2009110
Fig4.25 Tableaux de commutation pour faible positive vitesse, secteur + / -1
4.8.1.7 Sélection des vecteurs tensions
Les problèmes de l'ondulation et du comportement asymétrique du couple à grande vitesse ontété examinés dans le chapitre trois. Dans cette partie, on examine la méthode qui permet deprendre en considération le plus grand nombre de vecteurs de tensions disponibles danschaque zone de vitesse en vue d’améliorer les performances du système.
Choix de sVLa tension induite dépend de la vitesse mécanique, lorsque elle augmente, la tension
sV appliquée à la machine augmente également. Le vecteur tension sV entraîne le flux savec un décalage de 90 º donc il se trouve calé sur l’axe s . Le vecteur résultant qui affectele couple est la composante sV
du vecteur tension délivré par l’onduleur de tension
moins sV , De ce fait, le critère de sélection du vecteur tension sV doit choisi comme
référence. Si sVV s le couple est maintenu à son état actuel, si sVV s
le couple augmente
et si sVV le couple diminue.
Région à basse vitesse
Le vecteur tension sV est proche de zéro quand il est dans région à faible vitesse. Les vecteursde commutation sont choisis symétriquement autour de zéro selon la table de basse vitesse.Cette table de commutation dépend du sens de rotation du moteur. Si le couple estimé est àproximité de sa valeur de référence, l’état d'hystérésis du couple est zéro et donc le vecteur detension choisi est Zéro.Si l’état hystérésis du couple est +1 ou -1, une augmentation modéréeou diminution respectivement est recherchée. La sélection du vecteur tension est faite entreU200, U300, U500 et U600. Pour une augmentation du flux U200 et U600 doivent être choisis.Tandis que u300 et u500 servent pour la diminution du flux. Lorsque l’écart entre le couple de référence et estimé est grand c'est-à-dire Ccplx = +2 ou -2, la commande DSVM_DTCimpose un choix identique à celui de la commande DTC classique. Ainsi, les vecteurs U222,U333, U555 et U666 sont sélectionnés pour compenser l'écart le plus rapidement possible.
Ccplx
-2 -1 0 1 2
Cflx-1 U555 U500 U000 U300 U333
1 U666 U600 U000 U200 U222
Région à moyenne vitesse
Dans la région de la vitesse moyenne, 2/6/ nsn VVV , la tension induite commence à
introduire une asymétrie sur le comportement du couple. Pour sV positif et Ccplx = 0, lacommande DSVM_DTC prend en considération le choix des U200 et U300, puisque cesvecteurs rendent sV
approximativement égal à sV tout en maintenant le couple à son niveauactuel. Le choix de U200 impose une augmentation du flux tandis que U300 permet une

Commande directe du couple
Dr A. Meroufel 2008/2009111
Fig4.26 Ttableaux de commutation pour moyenne positive vitesse, secteur + / -1
Fig4.27 Tableaux de commutation pour haute vitesse positive, secteur -1
Fig4.28 Tableaux de commutation pour haute vitesse positive pour secteur +1
diminution du flux. Pour Ccplx = -1 une légère diminution du couple, le vecteur tensionchoisi est u000, Etant donné que c'est le seul vecteur à ce niveau on peut le choisir pour lesdeux cas de l’écart du flux.Pour Ccplx = +1, U220 est sélectionné lorsque les flux doit êtreaugmenté et U330 lorsqu’ on veut une diminution.Lorsque Ccplx = + 2 ou- 2, la commandeDSVM_DTC exploite le principe de la commande DTC classique.
Ccplx
-2 -1 0 1 2
Cflx-1 U555 U000 U300 U330 U333
1 U666 U000 U200 U220 U222
Région à haute vitesse
Dans la région à haute vitesse, 2/Vs nV , chaque secteur est divisé en deux et tous lesvecteurs disponibles sont utilisés. Ainsi, la tension induite est réduite considérablement.Supposons que s est dans le secteur -1 et si le couple doit être gardé au niveau zéro, lesvecteurs tensions U220 et U230 sont choisis en fonction des flux de référence. Pour diminuer lecouple ( Ccplx = -1), le choix des vecteurs tensions les plus proches et inférieur à sV
sontU200 ou U300. Pour augmenter le couple ( Ccplx = +1), il y a deux possibilités, soitl’augmentation du flux avec le choix des vecteurs tensions U222 et U223 soit la diminution duflux avec le choix des vecteurs tensions U332 et U333. Lors du passage de l’erreur du couple dezéro à un, on remarque qu’il y a plusieurs commutations du vecteur tension dans les tables de commutations d’où une réduction des ondulations au niveau du flux (U230, U220, U332, U222
pour le secteur -1). Dans le cas où le comparateur à hystérésis Ccplx = + ou -2, les vecteurstensions sélectionnés sont maximales et identiques à ceux de la moyenne et basse vitesse.
Ccplx
-2 -1 0 1 2
flxC-1 U555 U300 U230 U332 U333
1 U666 U200 U220 U222 U222
Ccplx
-2 -1 0 1 2
flxC-1 U555 U300 U330 U333 U333
1 U666 U200 U230 U223 U222

Commande directe du couple
Dr A. Meroufel 2008/2009112
4.8.2 Commande DTC par MLI vectorielle (SVM - DTC)
4.8.2.1 Commande DTC par SVM (SVM-DTC)Dans cette nouvelle stratégie de commande, les coordonnées qd du vecteur tension de laréférence peuvent être directement calculées à partir de l'état des régulateurs du couple et duflux. L'expression des coordonnées de tension est la suivante.Chacune des composantes du vecteur tension statorique est présentée dans le schéma suivant.
refssfqrefsd
drefsd
CcplxKV
CflxKV
1.2
1.2(4.42)
Où Ccplx , flxC sont les résultats binaires on- off respectivement du couple et du flux. Avec
Ccplx , flxC . 1,0 .
dK , qK sont des coefficients qui appartiennent à l'intervalle [0,1]. Quant à sf correspond à ladérivée de la position estimée de la vecteur du flux statorique. L’influence de chacune des composantes du vecteur tension statorique est présentée dans la fig4.14Les équations du stator dans le repaire qd , sont.
sdssqssq
sdsdssd
IRV
IRV
(4.43)
Où
sds est le retour des champs électromagnétiques.Par ailleurs, dans ce cadre de référence. ssd
Une autre expression du couple peut être directement déduite en fonction des vecteurs fluxstatorique et rotorique.
rsrsem KC sin (4.44)
Avec
rs LLM
PK
Dans le cas où les amplitudes des flux statorique et rotorique sont fixées, la dérivée du couplepeut être exprimée sous la forme.
refssf
Fig 4.29 : Principe du vecteur tension de référence
1.2.. CflxEK d
Ccplx
Cflx
je
++ 1.2.. CcplxEK q
sdrefV
sqrefV
refsV
refsV
MLIvectorielle
(SVM)
aS
bS
cS

Commande directe du couple
Dr A. Meroufel 2008/2009113
rsrsrefsrefrem KC cos
...
(4.45)
Sachant que le vecteur du flux rotorique est lié au vecteur du flux statorique par une fonctionde transfert du premier ordre, on peut noter que
sslr (4.46)
Et si on néglige la chute de tension créée par la résistance statorique, (4.43) devient
refs
.
ssq
ssd
V
V
(4.47)
Et (4.45) peut être réécrit comme
2max
2em
srefssqrefrem.
C
C1VKC (4.48)
Avec refrrefspKT max
A partir des équations (4.42), (4.47) et (4.48), la dérivée du couple et la dérivée du fluxstatorique peuvent être exprimées sous la forme.
2max
2.
11.2..
1.2
CC
ECcplxKKC
ECK
emqrefrem
flxds
(4.49)
Ces équations sont obtenues en vertu de l'hypothèse que les amplitudes des vecteurs fluxstatorique et rotorique sont égales à leurs valeurs de référence et la chute de tension créée parla résistance statorique est négligeable. Nous pouvons voir à partir de (4.49) que la stratégieproposée est identique à un contrôle quasi découplé.En effet, refdsV permet le contrôle de l'amplitude du flux et refqsV permet le contrôle du couple.
La difficulté principale réside dans le choix de la maîtrise du coefficient dK et qK . Ils sont
fortement liés à la tension continue E et au choix de la période d’échantillonnageeT . Ainsi,pour une période d'échantillonnage, les variations du couple estimé et de l’amplitude du flux statorique s’écrivent
eem
qrefrem
eflxds
TCC
ECcplxKKC
TECK
.11.2..
.1.2
2max
2
(4.50)

Commande directe du couple
Dr A. Meroufel 2008/2009114
Pour plus de précision les coefficients dK et qK doivent avoir de faibles valeurs afin deréduire l’effet Chattering sur la réponse du couple et de respecter les limites imposées par la modulation de l'espace vectoriel. Dans le même temps, si les coefficients sont plus grands, lecouple et le flux présentent une dynamique rapide. Par conséquent, le choix des coefficientsest le résultat d'un compromis entre toutes ces contraintes.Une pratique de calcul de ces coefficients peut être facilement déduite de (4.50) par la fixationde la variation du couple et de l’amplitude du vecteur flux statorique. Toutefois, les limites dela SVM ne doivent pas être ignorées. Ce dernier point devient critique à grande vitesse.
4.9 Simulation nouvelles stratégies de DTC
Les schémas blocs de simulation sont illustrés par la figure4.30
Le détail de chaque bloc nouveau figure en annexe
4.10 Résultats de simulationLes essais de la figure 4.31 et la figure 4.32 montrent le comportement du variateur de vitesseen régime dynamique et statique avec application d'une charge nominale et une inversion desens de rotation pour une vitesse moyenne. Sur le plan statique, on peut observer l'essai de lafigure 4.32 qui consiste en une comparaison de la maitrise de la fréquence de commutationdans les deux stratégies de commande directe.
Fig 4.30 Blocs de simulation Simulink(a): DSVM-DTC (b):SVM-DTC

Commande directe du couple
Dr A. Meroufel 2008/2009115
Fig4.31Réponses de vitesse, couple, courant et flux lors d’une variation de vitesse(a) : DSVM-DTC (b) : SVM-DTC
0 0.5 1 1.5 2 2.5-40-20
02040
t [Sec]
Cem
-est
[N.m
]
DC component = 0.2818 , THD= 42.12%
0 0.5 1 1.5 2 2.50
0.5
1
DC component = 0.9898 , THD= 0.18%
t [Sec]
flux-
est[W
eb]
-1 -0.5 0 0.5 1-1
-0.5
0
0.5
1trajectoire du f lux statorique
0 0.5 1 1.5 2 2.5
-20
0
20
t [Sec]
Ias
[A]
Fundamental (50Hz) = 1.146 , THD= 76.42%
0 0.5 1 1.5 2 2.5-1
0
1
t [Sec]flu
xst
ator
ique
[Wb]
0.5 0.55 0.6 0.65 0.7
-200
0
200
t [Sec]
Uas
[V]
10 20 30 40 500
50
100
Rang d'harmoniques
Fundamental (50Hz) = 91.96 , THD= 124.36%
Am
plitu
des
des
harm
oniq
ues
[V]
0 0.5 1 1.5 2 2.5-50
050
100150
t [Sec]
Wr[rad
/Sec
]
0 0.5 1 1.5 2 2.5-50
0
50
t [Sec]
Cem
-est
[N.m
]
DC component = 0.1521 , THD= 22.40%
0 0.5 1 1.5 2 2.50
0.5
1
DC component = 0.9887 , THD= 0.46%
t [Sec]
flux-
est[W
eb]
-1 -0.5 0 0.5 1-1
-0.5
0
0.5
1
trajectoire du f lux statorique
0 0.5 1 1.5 2 2.5
-20
0
20
t [Sec]
Ias
[A]
Fundamental (50Hz) = 3.855 , THD= 34.83%
0 0.5 1 1.5 2 2.5-1
0
1
t [Sec]
flux
stat
oriq
ue[W
b]
0.05 0.055 0.06 0.065 0.07
-200
0
200
t [Sec]
Uas
[V]
0 10 20 30 40 500
100
200
Rang d'harmoniques
Fundamental (50Hz) = 224.4 , THD= 30.79%
Am
plitu
des
des
harm
oniq
ues
[V]
0 0.5 1 1.5 2 2.5
-50
0
50
100
150
t [Sec]
Wr[rad
/Sec
]
(b)
(a)

Commande directe du couple
Dr A. Meroufel 2008/2009116
4.11 Interprétation des résultatsOn remarque, dans la figure 4.32 (b), que les fluctuations du couple et du flux restent
toujours à l’intérieur desbandes d’hystérésis et que les réponses de ces variables de contrôle sont rapides avec moins d’ondulations comparativement à la commande DTC classique D’autre part, La commande SVM-DTC présente une fréquence de commutation constanteavec un temps de réponse plus lent que la commande DSVM-DTC.
4.12 Conclusion
On conclut que la commande directe du couple par SVM est efficace (fréquence decommutation constante, moins d’ondulations), mais nécessite des interrupteurs à fréquence de commutation élevée et un espace mémoire important et par conséquent une augmentationdu coût de la commande. Par contre la commande DSVM-DTC est un choix optimalintermédiaire entre la commande DTC classique et la commande SVM-DTC.Actuellement, ces commandes améliorées de type DTC sont des stratégies de contrôle simpleà faible coût de calcul mais requièrent en contre partie des fréquences d’échantillonnage très élevées qui nécessitent un matériel spécialement adaptés (DSP, ASIC,…)
0.5 0.5002 0.5004 0.5006 0.5008 0.501 0.5012 0.5014 0.5016 0.5018 0.5029.5
10
10.5
t [Sec]
Cem
[N.m
]
0.5 0.5002 0.5004 0.5006 0.5008 0.501 0.5012 0.5014 0.5016 0.5018 0.5020.99
0.995
1
1.005
1.01
t [Sec]
flux
stat
oriq
ue[W
b]
Fig 4.32 Ondulations du couple et du flux(a) : DSVM-DTC (b) : SVM-DTC
0.5 0.51 0.52 0.53 0.54 0.55 0.56 0.57 0.58 0.59 0.69.5
10
10.5
t [Sec]
Cem
[N.m
]
0.5 0.51 0.52 0.53 0.54 0.55 0.56 0.57 0.58 0.59 0.60.99
0.995
1
1.005
1.01
t [Sec]
flux
stat
orique
[Wb]
(b)
(a)

Bibliographie
Dr A.Meroufel 117 2008/2009
BIBLIOGRAPHIE
OUVRAGES H. Buhler
‘Convertisseurs statiques’Presse polytechnique et universitaire normande, Laussane 1991
H.Buhler‘Conception des systèmes automatiques’Complément de traité de l’électricité, presse polytechnique normande, 1988
J.J.E slotine‘Applied nonlinear control’Printice Hall.international edition 1991
J.Chatelain‘Machines électriques’ Presse Polytechnique Normande 1990
B. Trannoy‘Modélisation des machines asynchrones, modèle de Park’ INP Toulouse, 1993
J.P Caron et J.P Hautier‘Modélisation et commande de la machine asynchrone’ Edition technip 1995
Barret Phillipe‘Régimes transitoires des machines tournantes électriques’ cours de l’école supérieure d’électricité Eyrolles
B. Bose‘Power electronics and ac drives’ Printice Hall 1986
Canudas de Wit Carlos‘Modélisation Contrôle Vectoriel et DTC, commande des moteurs asynchrones 1’Edition Hermes Science Europe 2000.
G. Guy, C. Guy‘Actionneurs électriques, principes modèles commande’édition Eyrolles, 2000.
ARTICLES
M. Pietrzak-David et B. de Fornel‘Comparaison et synthèse des procédés de commande vectorielle’ INPT- ENSEEIHT 1992
Lajoie- Mazence‘Les techniques de commande vectorielle des machines asynchrones destinées à la variationde la vitesse à haute performance’ EDF 92 NIR002 Janvier 1992

Bibliographie
Dr A.Meroufel 118 2008/2009
B. Douine‘Commande vectorielle directe de la machine asynchrone : estimation de flux et de vitesse’ Rapport de stage de D.E.A. INPL, 1994
G.Capoline et Y.FU‘Commande des machines asynchrones par flux orienté : Principe, methode et simulation’ Journée SEE, actionneurs électriques, 1989
A.Meroufel, M.K. Fellah, Y. Ramdani, A. Benaissa‘Commande en vitesse d’un moteur asynchrone alimenté en courant par la méthode du flux orienté’ proceeding CIP’2001, 9-11/01/2001, CDTA Alger
E.R.Carter, A.bellini, D.Hurdock, and D.Lorentz’Comparative evaluationof flux observers in high performance drives’ In proceedings of EPE Garatz 2001
Takahashi, T.Nogachi‘A new quick response and high efficiency control of an induction motor’ IEEE Trans.Ind.Appl., vol IA-22, N05, Sept/Oct 1986, pp 820-827
M. Depenbrock ‘Direct self control of inverter fed induction machine’ IEEE Trans. Power Electronics, vol 3, No 4, Oct 1988, pp 420-429
D. Casadei, F.Profumo, and A. Tani‘FOC and DTC: Two variable schemes for induction motors torque control’ IEEE Trans. On Power Electronics, vol 17, N05, pp779-787, 2002
D. Casadei, G. Serra, and A. Tani‘Implementation of DTC algorithm for induction motors based on discrete space vectormodulation’ IEEE Trans. On Power Electronics, vol 15, N04, pp769-777, July 2001
Y. A. Chapuis, D. Roye, S. Courtine‘Commande directe du couple d’une machine asynchrone par le contrôle direct de son flux statorique’ Journal de physique III, pp 863-880, Juin 1995
C. Lascu and I. Boldea,‘Direct torque control of sensorless induction motor drives. A sliding mode approach’, inProc.OPTIM 2002, Brasov, Vol. 2, pp. 481-488.
Se Jim Kim, Ho Jae Lee, Sang Koon Kim,Young Ahn Kwon‘Asic design for DTC basedspeed control of induction motor’ ISIE’01-Pusan Korea 2001, pp956-961
A.Meroufel, A. Massoum, A. Bendaoud, B. Belabes‘Utilisation du filtre de Kalman pour l’estimation des paramètres d’une machine asynchrone alimentée par un onduleur à MLI’ Revue AIM, Liege no4, 2004, p.19-25
M. Ouhrouche‘EKF based estimation of rotor flux, speed and rotor resistance in cage inductrion motorsensorless drive’ Proc. IASTED International Conf. Modelling and simulation May 15-172000, Pittsburgh USA

Bibliographie
Dr A.Meroufel 119 2008/2009
THESES
A.Meroufel‘Commande découplée d’une machine asynchrone sans capteur mécanique’doctorat d’état, UDL, Sidi Bel-Abbes, 2004.
Souad Chaouch‘Commande vectorielle robuste d’une machine à induction sans capteur de vitesse’Thèsedoctorat, UHL, Batna, 2005
Frank Morand‘Techniques d’observation sans capteur de vitesse en vue de la commande des machines asynchrones’ Thèse doctorat, Lyon (France) 2005
M. SC. M. Malinowski‘Sensorless control strategies for three-phase PWM Rectifiers’, Ph.D. thesis, Faculty ofElectrical Engineering Institute of Control and Industrial Electronics, Warsaw University ofTechnology, Warsaw, Poland 2001.
M. R.Zolghadri‘Contrôle direct du couple des actionneurs synchrones’ Thèse de doctorat INP Grenoble, (France) 1997
N.R.N. Idris‘Improved direct torque control of induction machines’ Phd Thesis, University technology Malaysia 2000
Miloud Y‘Etude de l’estimation de la résistance rotorique dans la commande vectorielle d’un moteur asynchrone en utilisant la logique floue’Thèse de Doctorat, U.S.T.Oran, Algérie, Février2006.
Miloudi A‘Etude Et Conception De Régulateurs Robustes Dans Différentes Stratégies De CommandesD’un Moteur Asynchrone’, Thèse de Doctorat, U.S.T.Oran, Algérie, Juin 2006
Y.A. Chapuis‘Contrôle direct du couple d’une machine asynchronepour l’orientation de son flux statorique’ Thèse de doctorat INP Grenoble 15 Janv 1995
MEMOIRESa- MAGISTERS
Zaidi Saida‘Commande non linéaire du moteur à induction’Thèse magister UHL, Batna, 2006
Bentaalah Abderrahim‘Linéarisation entrée sortie et réglage flou d’une machine asynchrone avec pilotage vectorielet observateur à mode glissant’ Thèse de magister, UDL, Sidi Bel-Abbes, 2005

Bibliographie
Dr A.Meroufel 120 2008/2009
Massoum Ahmed‘Réglage flou et neuro-flou d’une machines asynchrone sans capteur mécanique’. Thèse demagister, UDL, Sidi Bel-Abbes, 2003
M. Hadaf‘Contrôle directe du couple des machines synchrones avec et sans capteurs mécaniques’ Thèse de magistère, Electrotechnique, Université A.Mira de Béjaia, 27 Nov 2002
Tamrabet Hanene‘Robustesse d’un contrôle vectoriel de structure minimal d’une machine asynchrone’Thèsemagister, UHL, Batna, 2006
Hamdouche Sonia‘Contribution à l’amélioration des structures de régulation des courants des machines alternative’Thèse magister, UHL, Batna, 2007
Rezui slimane‘Etude comparative des performances dynamique de différents observateurs de flux pour lacommande directe d’une machine asynchrone sans capteur mécanique’ Thèse magister,EMP, 2002
Marouani khoudir‘Etude et réalisation d’un banc expérimental de commande direct du couple d’une machine asynchrone par PC sans capteur mécanique’Thèse magister, EMP, 2001
Nefsi Mostefa‘Commande directe du couple d’une machine asynchrone sans capteur mécanique’Thèse de magister, UDL, Sidi Bel-Abbes, 2008
b- PFEs
Gabriel Buche‘Commande vectorielle de la machine asynchrone en environnement en temps réelMATLAB/SIMULINK’PFE, Grenoble (France) 2001
Gaid Attou, Houar Noureddine‘Commande par mode glissant flou d’une machine asynchrone’PFE, UDL, Sidi Bel-Abbes2007
Seiga , Bensadat‘Commande vectorielle directe d’une machine asynchrone sans capteur mécanique’PFE,UDL, Sidi Bel-Abbes 2008
Hammaoui Youcef, Merine Kadour‘Commande scalaired’une machine asynchrone’PFE, UDL, Sidi Bel-Abbes 2009

Annexe
Dr A. Meroufel 121 2008/2009
ANNEXE
NomenclatureIndicess : indice des grandeurs statoriquesr : indice des grandeurs rotoriques
, : indice des grandeurs liées au repère statorique ou rotorique
d,q : indice des grandeurs du repère de Park dqref : indice des grandeurs de référence
Grandeurs physiquesX : Grandeur physique
X~ : Grandeur estimée
X : Grandeur complexe
X: Grandeur conjuguée
*X : Grandeur de consigneTX : Grandeur transposée
iX : Grandeur physique relative au courant
uX : Grandeur physique relative à la tension
U,V ,u,v : tension
dcU : Tension délivrée par le redresseur
: Flux
pk : Coefficient proportionnel
ik : Coefficient d’intégration
Ce : couple électromagnétiqueCr : couple résistifE : F.e.mPe : puissance instantanée
T, eT : période d’échantillonnage
rT : Constante de temps rotorique
mT : Constante mécanique
fT : Constantede temps de l’association l’onduleur - commande rapprochée
: Angle
uA : Matrice (nxn) relatif au modèle de tension
uB : Matrice (nxm) relatif au modèle de tension
uX : Vecteur d’état (nx1) relatif au modèle de tension

Annexe
Dr A. Meroufel 122 2008/2009
cA : Matrice (nxn) relatif au modèle de courant
cB : Matrice (nxm) relatif au modèle de courant
cX :Vecteur d’état (nx1) relatif au modèlede courant
qcdc e;e : F.e.m de compensation
h : Banded’hystérésis
s : Banded’hystérésis du flux statorique
N (i=1,..,6) : ZoneCpl : comparateur coupleCfl : comparateur fluxm : indice de modulationr : taux de modulation
Paramètres de la machine asynchrone utilisée dans la simulationR : avec indice résistanceL : avec indice inductanceM : Inductance mutuelleP : nombre de paires de pôlesJ : l’inertiefr : coefficient de frottement
Caractéristiques de la MASP=1.5kwU=380/220V -50HzI=3/6AN=1450tr/mn, P=2
85.4Rs , 81.3R r
H274.0Ls , H274.0Lr , H258.0M 2Kgm031.0J , s/rd/Nm0114.0fr
Contenu des blocs ‘Simulink’

Annexe
Dr A. Meroufel 123 2008/2009
function y=table(x)%sélection des tensions VsC_flux=x(1);C_pl=x(2);secteur=x(3);V0=[0;0;0];V1=[1;0;0];V2=[1;1;0];V3=[0;1;0];V4=[0;1;1];V5=[0;0;1];V6=[1;0;1];V7=[1;1;1];if C_flux==1%%%%%%%%%%%%%%%%%%%%%%%if C_pl==1if secteur==1
y=V2;elseif secteur==2y=V3;elseif secteur==3y=V4;elseif secteur==4y=V5;elseif secteur==5y=V6;elseif secteur==6y=V1;
end;elseif C_pl==0%%%%%%%%%%%%%%%%%%%%%
if secteur==1y=V0;
elseif secteur==2y=V7;
elseif secteur==3y=V0;
elseif secteur==4y=V7;
elseif secteur==5y=V0;
elseif secteur==6y=V7;
end;elseif C_pl==-1%%%%%%%%%%%%%%%
if secteur==1y=V6;
elseif secteur==2y=V1;
elseif secteur==3y=V2;
elseif secteur==4y=V3;
elseif secteur==5y=V4;
elseif secteur==6y=V5;
end;end;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%else
if C_pl==1

Annexe
Dr A. Meroufel 124 2008/2009
if secteur==1y=V3;
elseif secteur==2y=V4;
elseif secteur==3y=V5;
elseif secteur==4y=V6;
elseif secteur==5y=V1;
elseif secteur==6y=V2;
end;elseif C_pl==0%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
if secteur==1y=V7;elseif secteur==2y=V0;elseif secteur==3y=V7;elseif secteur==4y=V0;elseif secteur==5y=V7;elseif secteur==6y=V0;
end;elseif C_pl==-1%%%%%%%%%%%%%%%%%%%%%%%%%%%
if secteur==1y=V5;
elseif secteur==2y=V6;
elseif secteur==3y=V1;
elseif secteur==4y=V2;
elseif secteur==5y=V3;
elseif secteur==6y=V4;end;
end;end;

Annexe
Dr A. Meroufel 125 2008/2009
Différents blocs de l'estimateur du flux statorique et du couple de la MAS

Annexe
Dr A. Meroufel 126 2008/2009
function Vabc=tadle_DTC_DSVM(x)%sélection des vecteur tensionCcpl=x(3);Cf=x(2);N=x(4);E=x(1)/2;%"Tension nulle"V0=[0;0;0];V7=V0; V14=V0;%"Demie tension"V1=E*[2/3;-1/3;-1/3]; V2=E*[1/3;1/3;-2/3]; V3=E*[-1/3;2/3;-1/3]; V4=E*[-2/3;1/3;1/3];V5=E*[-1/3;-1/3;2/3]; V6=E*[1/3;-2/3;1/3];V8=V1; V9=V2; V10=V3; V11=V4; V12=V5; V13=V6;%"pleine tension"V15=E*[4/3;-2/3;-2/3]; V16=E*[2/3;2/3;-4/3]; V17=E*[-2/3;4/3;-2/3]; V18=E*[-4/3;2/3;2/3];V19=E*[-2/3;-2/3;4/3]; V20=E*[2/3;-4/3;2/3];%"Tension intermédiaire"V21=E*[1;0;-1]; V22=E*[0;1;-1]; V23=E*[-1;1;0]; V24=E*[-1;0;1]; V25=E*[0;-1;1];V26=E*[1;-1;0];%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%if (Cf==1 & Ccpl==2)
if (N==1)Vabc=V21;
elseif (N==2)Vabc=V16;
elseif (N==3)Vabc=V22;
elseif (N==4)Vabc=V17;
elseif (N==5)Vabc=V23;
elseif (N==6)Vabc=V18;
elseif (N==7)Vabc=V24;
elseif (N==8)Vabc=V19;
elseif (N==9)Vabc=V25;
elseif (N==10)Vabc=V20;
elseif (N==11)Vabc=V26;

Annexe
Dr A. Meroufel 127 2008/2009
elseif (N==12)Vabc=V15;
end;end;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%if (Cf==1 & Ccpl==1)
if (N==1)Vabc=V21;
elseif (N==2)Vabc=V2;
elseif (N==3)Vabc=V22;
elseif (N==4)Vabc=V3;
elseif (N==5)Vabc=V23;
elseif (N==6)Vabc=V4;
elseif (N==7)Vabc=V24;
elseif (N==8)Vabc=V5;
elseif (N==9)Vabc=V25;
elseif (N==10)Vabc=V6;
elseif (N==11)Vabc=V26;
elseif (N==12)Vabc=V1;
end;end;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%if (Cf==1 & Ccpl==0)
Vabc=V0;end;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%if (Cf==1 & Ccpl==-1)
if (N==1)Vabc=V26;
elseif (N==2)Vabc=V1;
elseif (N==3)Vabc=V21;
elseif (N==4)Vabc=V2;
elseif (N==5)Vabc=V22;
elseif (N==6)Vabc=V3;
elseif (N==7)Vabc=V23;

Annexe
Dr A. Meroufel 128 2008/2009
elseif (N==8)Vabc=V4;
elseif (N==9)Vabc=V24;
elseif (N==10)Vabc=V5;
elseif (N==11)Vabc=V25;
elseif (N==12)Vabc=V6;
end;end;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%if (Cf==1 & Ccpl==-2)
if (N==1)Vabc=V26;
elseif (N==2)Vabc=V15;
elseif (N==3)Vabc=V21;
elseif (N==4)Vabc=V16;
elseif (N==5)Vabc=V22;
elseif (N==6)Vabc=V17;
elseif (N==7)Vabc=V23;
elseif (N==8)Vabc=V18;
elseif (N==9)Vabc=V24;
elseif (N==10)Vabc=V19;
elseif (N==11)Vabc=V25;
elseif (N==12)Vabc=V20;
end;end;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%if (Cf==-1 & Ccpl==2)
if (N==1)Vabc=V17;
elseif (N==2)Vabc=V23;
elseif (N==3)Vabc=V18;
elseif (N==4)

Annexe
Dr A. Meroufel 129 2008/2009
Vabc=V24;elseif (N==5)
Vabc=V19;elseif (N==6)
Vabc=V25;elseif (N==7)
Vabc=V20;elseif (N==8)
Vabc=V26;elseif (N==9)
Vabc=V15;elseif (N==10)
Vabc=V21;elseif (N==11)
Vabc=V16;elseif (N==12)
Vabc=V22;end;
end;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%if (Cf==-1 & Ccpl==1)
if (N==1)Vabc=V3;
elseif (N==2)Vabc=V23;
elseif (N==3)Vabc=V4;
elseif (N==4)Vabc=V24;
elseif (N==5)Vabc=V5;
elseif (N==6)Vabc=V25;
elseif (N==7)Vabc=V6;
elseif (N==8)Vabc=V26;
elseif (N==9)Vabc=V1;
elseif (N==10)Vabc=V21;
elseif (N==11)Vabc=V2;
elseif (N==12)Vabc=V22;
end;end;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%if (Cf==-1 & Ccpl==0)
Vabc=V0;end;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%

Annexe
Dr A. Meroufel 130 2008/2009
if (Cf==-1 & Ccpl==-1)if (N==1)
Vabc=V5;elseif (N==2)
Vabc=V25;elseif (N==3)
Vabc=V6;elseif (N==4)
Vabc=V26;elseif (N==5)
Vabc=V1;elseif (N==6)
Vabc=V21;elseif (N==7)
Vabc=V2;elseif (N==8)
Vabc=V22;elseif (N==9)
Vabc=V3;elseif (N==10)
Vabc=V23;elseif (N==11)
Vabc=V4;elseif (N==12)
Vabc=V24;end;
end;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%if (Cf==-1 & Ccpl==-2)
if (N==1)Vabc=V19;
elseif (N==2)Vabc=V25;
elseif (N==3)Vabc=V20;
elseif (N==4)Vabc=V26;
elseif (N==5)Vabc=V15;
elseif (N==6)Vabc=V21;
elseif (N==7)Vabc=V16;
elseif (N==8)Vabc=V22;
elseif (N==9)Vabc=V17;
elseif (N==10)Vabc=V23;
elseif (N==11)Vabc=V18;
elseif (N==12)

Annexe
Dr A. Meroufel 131 2008/2009
Vabc=V24;end;
end;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%if (Cf==0 & Ccpl==2)
if (N==1)Vabc=V22;
elseif (N==2)Vabc=V17;
elseif (N==3)Vabc=V23;
elseif (N==4)Vabc=V18;
elseif (N==5)Vabc=V24;
elseif (N==6)Vabc=V19;
elseif (N==7)Vabc=V25;
elseif (N==8)Vabc=V20;
elseif (N==9)Vabc=V26;
elseif (N==10)Vabc=V15;
elseif (N==11)Vabc=V21;
elseif (N==12)Vabc=V16;
end;end;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%if (Cf==0 & Ccpl==1)
if (N==1)Vabc=V22;
elseif (N==2)Vabc=V3;
elseif (N==3)Vabc=V23;
elseif (N==4)Vabc=V4;
elseif (N==5)Vabc=V24;
elseif (N==6)Vabc=V5;
elseif (N==7)Vabc=V25;
elseif (N==8)Vabc=V6;
elseif (N==9)

Annexe
Dr A. Meroufel 132 2008/2009
Vabc=V26;elseif (N==10)
Vabc=V1;elseif (N==11)
Vabc=V21;elseif (N==12)
Vabc=V2;end;
end;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%if (Cf==0 & Ccpl==0)
Vabc=V0;end;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%if (Cf==0 & Ccpl==-1)
if (N==1)Vabc=V25;
elseif (N==2)Vabc=V6;
elseif (N==3)Vabc=V26;
elseif (N==4)Vabc=V1;
elseif (N==5)Vabc=V21;
elseif (N==6)Vabc=V2;
elseif (N==7)Vabc=V22;
elseif (N==8)Vabc=V3;
elseif (N==9)Vabc=V23;
elseif (N==10)Vabc=V4;
elseif (N==11)Vabc=V24;
elseif (N==12)Vabc=V5;
end;end;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%if (Cf==0 & Ccpl==-2)
if (N==1)Vabc=V25;
elseif (N==2)Vabc=V20;

Annexe
Dr A. Meroufel 133 2008/2009
elseif (N==3)Vabc=V26;
elseif (N==4)Vabc=V15;
elseif (N==5)Vabc=V21;
elseif (N==6)Vabc=V16;
elseif (N==7)Vabc=V22;
elseif (N==8)Vabc=V17;
elseif (N==9)Vabc=V23;
elseif (N==10)Vabc=V18;
elseif (N==11)Vabc=V24;
elseif (N==12)Vabc=V19;
end;end;

Annexe
Dr A. Meroufel 134 2008/2009
Différents blocs du contrôleur SVM-DTC de la MAS
function y=svm(x)%programme de calcul de SVM(space vector modulation)t=x(1);m=x(2);fre=x(3);r=x(4);E=x(5);V_alpha=x(6);V_beta=x(7);pe=1/fre;Ts=pe/m;v0=[0;0;0];v1=[1;0;0];v2=[1;1;0];v3=[0;1;0];v4=[0;1;1];v5=[0;0;1];v6=[1;0;1];v7=[1;1;1];teta=asin(V_alpha/(r*E*sqrt(3/2)));%r*E*sqrt(3/2)*sin(teta)2*pi*fre*t;vref=[V_alpha;V_beta];ph_alpha=V_alpha;ph_beta=V_beta;if ph_alpha>0%%%%%%%%%%%%%%%%%%%%%
if ph_beta>0if (abs(ph_alpha)*sqrt(3))>abs(ph_beta)

Annexe
Dr A. Meroufel 135 2008/2009
secteur=1;else
secteur=2;end;
elseif (abs(ph_alpha)*sqrt(3))>abs(ph_beta)
secteur=6;else
secteur=5;end;
end;else
if ph_beta>0if (abs(ph_alpha)*sqrt(3))>abs(ph_beta)
secteur=3;else
secteur=2;end;
elseif (abs(ph_alpha)*sqrt(3))>abs(ph_beta)
secteur=4;else
secteur=5;end;
end;end;B=sqrt(3)*Ts/(2*E);B=sqrt(3)*Ts/(2);
if secteur==1A=[sin(pi/3) -cos(pi/3);0 1]*vref;
T=B*A;T0=(Ts-T(1)-T(2));p1=T0/4;p2=T(1)/2;p3=T(2)/2;
s1=v0;s2=v1;s3=v2;s4=v7;elseif secteur==2
A=[sin(2*pi/3) -cos(2*pi/3);-sin(pi/3) cos(pi/3)]*vref;T=B*A;T0=(Ts-T(1)-T(2));p1=T0/4;p2=T(2)/2;p3=T(1)/2;
s1=v0;s2=v3;s3=v2;s4=v7;elseif secteur==3
A=[sin(3*pi/3) -cos(3*pi/3);-sin(2*pi/3) cos(2*pi/3)]*vref;T=B*A;T0=(Ts-T(1)-T(2));p1=T0/4;p2=T(1)/2;p3=T(2)/2;
s1=v0;s2=v3;s3=v4;s4=v7;

Annexe
Dr A. Meroufel 136 2008/2009
elseif secteur==4A=[sin(4*pi/3) -cos(4*pi/3);-sin(3*pi/3) cos(3*pi/3)]*vref;T=B*A;T0=(Ts-T(1)-T(2));p1=T0/4;p2=T(2)/2;p3=T(1)/2;
s1=v0;s2=v5;s3=v4;s4=v7;elseif secteur==5
A=[sin(5*pi/3) -cos(5*pi/3);-sin(4*pi/3) cos(4*pi/3)]*vref;T=B*A;T0=(Ts-T(1)-T(2));p1=T0/4;p2=T(1)/2;p3=T(2)/2;
s1=v0;s2=v5;s3=v6;s4=v7;elseif secteur==6
A=[sin(6*pi/3) -cos(6*pi/3);-sin(5*pi/3) cos(5*pi/3)]*vref;T=B*A;T0=(Ts-T(1)-T(2));p1=T0/4;p2=T(2)/2;p3=T(1)/2;
s1=v0;s2=v1;s3=v6;s4=v7;end;t1=rem(t,Ts);if t1<=p1
y=s1;elseif t1<=p1+p2
y=s2;elseif t1<=p1+p2+p3
y=s3;elseif t1<=3*p1+p2+p3
y=s4;elseif t1<=3*p1+p2+2*p3
y=s3;elseif t1<=3*p1+2*p2+2*p3
y=s2;elsey=s1;
end;
Top Related