Synthèse de lois de commande sous garanties temps-réel dures affaiblies Mongi BEN GAIDINRIA...
43
Synthèse de lois de commande sous garanties temps-réel dures affaiblies Mongi BEN GAID INRIA Rhône- Alpes Daniel SIMON INRIA Rhône- Alpes Olivier SENAME GIPSA-LAB
-
Upload
auben-lallemand -
Category
Documents
-
view
102 -
download
0
Transcript of Synthèse de lois de commande sous garanties temps-réel dures affaiblies Mongi BEN GAIDINRIA...

Synthèse de lois de commande sous garanties
temps-réel dures affaiblies Mongi BEN GAID INRIA Rhône-Alpes
Daniel SIMON INRIA Rhône-Alpes
Olivier SENAME GIPSA-LAB

Séminaire NeCS 2
Sommaire
Contexte et motivations Définition du problème Notion de commande à exécution
accélérable Application du principe d’optimalité de
Bellman pour la synthèse de commandes à exécution accélérable
Conclusions

Séminaire NeCS 3
Sommaire
Contexte et motivations Définition du problème Notion de commande à exécution
accélérable Application du principe d’optimalité de
Bellman pour la synthèse de commandes à exécution accélérable
Conclusions

Séminaire NeCS 4
ContexteSystèmes commandés en réseau
Réseau
S S A A… …
C C C
S A…
Sous-système Sous-système…
…
…

Séminaire NeCS 5
État de la pratique
Les problèmes de commande et d’ordonnancement sont découplés
Les tâches de commande sont considérées comme des tâches temps-réel dures
Les ressources sont dimensionnées par rapport au pire cas
Les problèmes induits par les retards et la gigue sont ignorés

Séminaire NeCS 6
Motivations
Utilisation plus efficace des ressources Variation de la charge de calcul ou de
communication (activités sporadiques…) Non déterminisme des processeurs modernes Dimensionnement basé sur le pire cas conduit au
surdimensionnement Tolérance aux pannes
Dégradation contrôlée des ressources Gestion des surcharges

Séminaire NeCS 7
Classes de garanties temps-réel
Temps-réel dur Toutes les échéances doivent être respectées
Temps-réel mou Des échéances peuvent être ratées, la qualité de
service est reliée statistiquement aux échéances respectées
Temps-réel dur affaibli Des échéances clairement spécifiées peuvent
être ratées

Séminaire NeCS 8
Temps-réel dur affaibli [Bernat, Burns et Llamosí, 01]
Skip-over [Koren et Shasha, 96] Facteur de saut s L’échéance d’une action toutes les s actions
consécutives peut être ratée (m,k)-firm [Hamdaoui et Ramanathan, 95]
Garantie (m,k)-firm Les échéances de m action parmi k actions
consécutives doivent être respectées

Séminaire NeCS 9
Objectifs
Établir un lien rigoureux entre la théorie de la commande et la théorie de l’ordonnancement temps-réel affaibli
Relier les paramètres de l’ordonnancement temps-réel dur affaibli à la qualité de la commande (QoC)
Présenter un principe général (applicable aux systèmes non linéaires)

Séminaire NeCS 10
Sommaire
Contexte et motivations Définition du problème Notion de commande à exécution
accélérable Application du principe d’optimalité de
Bellman pour la synthèse de commandes à exécution accélérable
Conclusions

Séminaire NeCS 11
Définition du problème
Système commandé
Critère de synthèse (et de performance)
Le système est commandé par une tâche Période de la tâche = période du système
(basées sur l’utilisation moyenne)

Séminaire NeCS 12
Notion de séquence d’exécutionDéfinition
Une séquence d’exécution est une suite infinie d’éléments de {0,1}
A chaque réalisation de la tâche est associée une séquence d’exécution définie par
si travail activé à l’instant k termine avant son échéance,
sinon.

Séminaire NeCS 13
Notion de séquence d’exécutionExemples
(1,0,0,1,0,0,1,0,0,…)
(1,1,1,1,1,1,1,1,1,…)
(1,0,1,1,0,1,0,1,1,…)

Séminaire NeCS 14
Séquence d’exécution au pire casApproche par marquage [Ramanathan, 99]
Classifier les instances en Obligatoires Facultatives
Assurer que dans tous les cas de figure, les instances obligatoires terminent avant leur échéance

Séminaire NeCS 15
Séquence d’exécution au pire casContrainte (μ,κ)-firm
Une instance est classée obligatoire si et seulement si son compteur d’invocation k vérifie [Ramanathan, 99]

Séminaire NeCS 16
Commande effective
Commande appliquée au système en prenant en compte les contraintes d’exécution
Pour une loi de commande , est la commande effective définie par

Séminaire NeCS 17
Ensemble d’exécution
Associe à chaque séquence d’exécution les compteurs d’invocation des travaux qui terminent avant leur échéance

Séminaire NeCS 18
Sommaire
Contexte et motivations Définition du problème Notion de commande à exécution
accélérable Application du principe d’optimalité de
Bellman pour la synthèse de commandes à exécution accélérable
Conclusions

Séminaire NeCS 19
Notion de commande accélérableDéfinition
Supposons que la loi de commande --- a été définie telle que pour la séquence d'exécution au pire cas , la fonction coût ------------------- est finie. La loi de commande ---- est dite accélérable pour la fonctionnelle de coût J et la séquence d'exécution au pire cas - , si pour toutes séquences d'exécutions -- et -- telles que ----------------------- pour tout -------- les fonctions de coût associées vérifient

Séminaire NeCS 20
Notion de commande accélérableConséquences
Plus d’exécutions sont réalisée, meilleure est la qualité de la commande
Performance au pire cas garantie Sous certaines conditions (fonction coût),
accélérabilité implique stabilité asymptotique

Séminaire NeCS 21
Notion de commande accélérableExemples
En général, « accélérer » une tâche de commande synthétisée à une fréquence d’échantillonnage donnée n’améliore pas forcément les performances
Illustration : Performance pour deux séquences d’exécution (1,0,1,0,1,0,1,0,…) (1,1,1,0,1,0,1,0,…)

Séminaire NeCS 22
Notion de commande accélérableExemple :Pendule
Décrit par le modèle linéaire
avec
et θ, l, m, fv sont l’angle, la longueur, la masse et le coefficient de frottement visqueux
Pendue stable α=-1, pendule instable α=1 Commande optimale à la période T=0.2 s

Séminaire NeCS 23
Notion de commande accélérablePremier exemple : pendule instable
Amélioration
Dégradation

Séminaire NeCS 24
Notion de commande accélérableSecond exemple : pendule stable
Amélioration
Dégradation

Séminaire NeCS 25
Notion de tâche à exécution accélérable
Une tâche de commande est dite à exécution accélérable si la loi de commande qu’elle calcule l’est aussi

Séminaire NeCS 26
Sommaire
Contexte et motivations Définition du problème Notion de commande à exécution
accélérable Application du principe d’optimalité de
Bellman pour la synthèse de commandes à exécution accélérable
Conclusions

Séminaire NeCS 27
Commande accélérableMéthode générale de synthèse
Définir la séquence d’exécution au pire cas γ La séquence d’exécution maximale est σ=(1,1,1,1,1,1,1,…)
Soit k0=-1. Définir la suite d’instants

Séminaire NeCS 28
Commande accélérableMéthode générale de synthèse
Définir la suite de séquences d’exécutions
où
et

Séminaire NeCS 29
Commande accélérableMéthode générale de synthèse
Exemple
γ
σ1
σ2
σ3
1k 2k 3k

Séminaire NeCS 30
Commande accélérableMéthode générale de synthèse
Définir l’ensemble des commandes admissibles
Considérer les problèmes d’optimisation
Choisir la commande telle que

Séminaire NeCS 31
Commande accélérable Théorème
Si les problèmes d’optimisation (définis précédemment) admettent une solution, alors la loi de commande ---- est accélérable pour la fonctionnelle de coût J et la séquence d’exécution au pire cas γ

Séminaire NeCS 32
Commande accélérableIllustration graphique
t
J

Séminaire NeCS 33
Commande accélérableExtension de la méthode LQR
Le modèle du système et de la fonction coût sont spécialisés

Séminaire NeCS 34
Commande accélérableExtension de la méthode LQR
Définir la distance entre le travail courant et le prochain travail obligatoire
Illustration
γ
dγ((2)
dγ((1)

Séminaire NeCS 35
Commande accélérableExtension de la méthode LQR
Définir le modèle virtuel suivant

Séminaire NeCS 36
Commande accélérableExtension de la méthode LQR
La loi de commande accélérable a pour expression
avec
et

Séminaire NeCS 37
Illustration
Pendule instable Contrainte (m,k)=(1,3) Synthèse accélérable

Séminaire NeCS 38
SimulationsÉvolution à partir de l’état initial [2 -5]’
0 2 4 6 8 10 12 14 16 18 20181.2
181.3
181.4
181.5
181.6
181.7
181.8
i
Cum
ulat
ive
cost
for
i

Séminaire NeCS 39
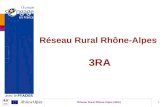
SimulationsSortie du système
0 5 10 15 20 25 300
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Time (s)
y(t)
100 % miss50 % miss0 % miss

Séminaire NeCS 40
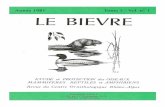
SimulationsCoût cumulé
0 5 10 15 20 25 300
50
100
150
200
250
300
350
Time (s)
Cum
ulat
ive
cost
100 % miss66 % miss50 % miss33 % miss0 % miss

Séminaire NeCS 41
Sommaire
Contexte et motivations Définition du problème Notion de commande à exécution
accélérable Application du principe d’optimalité de
Bellman pour la synthèse de commandes à exécution accélérable
Conclusions

Séminaire NeCS 42
Conclusion
Approche générale (valable pour les systèmes non linéaires)
Établissement d’un lien rigoureux entre les théories de la commande et de l’ordonnancement temps-réel dur affaibli
Commande asynchrone Synthèse basée sur la performance moyenne

Séminaire NeCS 43
Travail futur
Analyse de robustesse (retards, gigue) Application au quadri-rotor