Sii en-pcsi-etudedessa-2
48
TABLE DES MATIÈRES 1 Caractérisation et étude des systèmes asservis 1 1.1 Systèmes asservis ............................... 1 1.1.1 Structure d’un système asservi ................... 1 1.1.2 Régulation et asservissement .................... 3 1.2 Caractéristiques d’un système asservi ................... 4 1.2.1 Exemples de cahiers des charges de SA .............. 4 1.2.2 Les signaux canoniques ....................... 4 1.2.3 Précision ................................ 6 1.2.4 Rapidité ................................ 8 1.2.5 Dépassements ............................. 9 1.2.6 Stabilité ................................. 9 1.2.7 Systèmes dynamiques ........................ 11 1.3 Systèmes linéaires continus invariants .................. 12 1.3.1 Systèmes linéaires .......................... 12 1.3.2 Systèmes continus .......................... 14 1.3.3 Systèmes invariants ......................... 14 1.4 Description des systèmes linéaires ..................... 15 1.4.1 Description par les équations différentielles ........... 15 1.4.2 Résolution par la transformée de Laplace ............. 16 1.5 Fonction de transfert – Transmittance ................... 25 1.5.1 Forme canonique ........................... 25 1.5.2 Schéma bloc .............................. 26 1.5.3 Pôles et zéros ............................. 26 1.6 Représentation des systèmes asservis et linéaires par le schéma fonc- tionnel ..................................... 27 1.6.1 Schéma fonctionnel ou schéma bloc ............... 27 1
-
Upload
zoubir-benmaamar -
Category
Documents
-
view
204 -
download
5
Transcript of Sii en-pcsi-etudedessa-2
TABLE DES MATIÈRES
1 Caractérisation et étude des systèmes asservis 11.1 Systèmes asservis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Structure d’un système asservi . . . . . . . . . . . . . . . . . . . 11.1.2 Régulation et asservissement . . . . . . . . . . . . . . . . . . . . 3
1.2 Caractéristiques d’un système asservi . . . . . . . . . . . . . . . . . . . 41.2.1 Exemples de cahiers des charges de SA . . . . . . . . . . . . . . 41.2.2 Les signaux canoniques . . . . . . . . . . . . . . . . . . . . . . . 41.2.3 Précision . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.2.4 Rapidité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.2.5 Dépassements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.2.6 Stabilité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.2.7 Systèmes dynamiques . . . . . . . . . . . . . . . . . . . . . . . . 11
1.3 Systèmes linéaires continus invariants . . . . . . . . . . . . . . . . . . 121.3.1 Systèmes linéaires . . . . . . . . . . . . . . . . . . . . . . . . . . 121.3.2 Systèmes continus . . . . . . . . . . . . . . . . . . . . . . . . . . 141.3.3 Systèmes invariants . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.4 Description des systèmes linéaires . . . . . . . . . . . . . . . . . . . . . 151.4.1 Description par les équations différentielles . . . . . . . . . . . 151.4.2 Résolution par la transformée de Laplace . . . . . . . . . . . . . 16
1.5 Fonction de transfert – Transmittance . . . . . . . . . . . . . . . . . . . 251.5.1 Forme canonique . . . . . . . . . . . . . . . . . . . . . . . . . . . 251.5.2 Schéma bloc . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261.5.3 Pôles et zéros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1.6 Représentation des systèmes asservis et linéaires par le schéma fonc-tionnel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271.6.1 Schéma fonctionnel ou schéma bloc . . . . . . . . . . . . . . . 27
1
2 TABLE DES MATIÈRES
1.6.2 Des équations différentielles au schéma-bloc . . . . . . . . . . 281.6.3 Manipulation des schémas blocs . . . . . . . . . . . . . . . . . . 291.6.4 Exemple guide : détermination d’une fonction de transfert . . 321.6.5 Application guide : Moteur à courant continu à champ per-
manent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 371.6.6 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
1.7 Corrigés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
CHAPITRE 1
CARACTÉRISATION ET ÉTUDE DES SYSTÈMES ASSERVIS
1.1 Systèmes asservis
Les systèmes asservis sont des systèmes automatisés, ils forment la plus grandepartie des systèmes que nous allons étudier cette année.
1.1.1 Structure d’un système asservi
L’objectif d’un système automatisé étant de remplacer l’homme dans une tâche,nous allons pour établir la structure d’un système automatisé commencer par étu-dier le fonctionnement d’un système dans lequel l’homme est la « partie com-mande ».
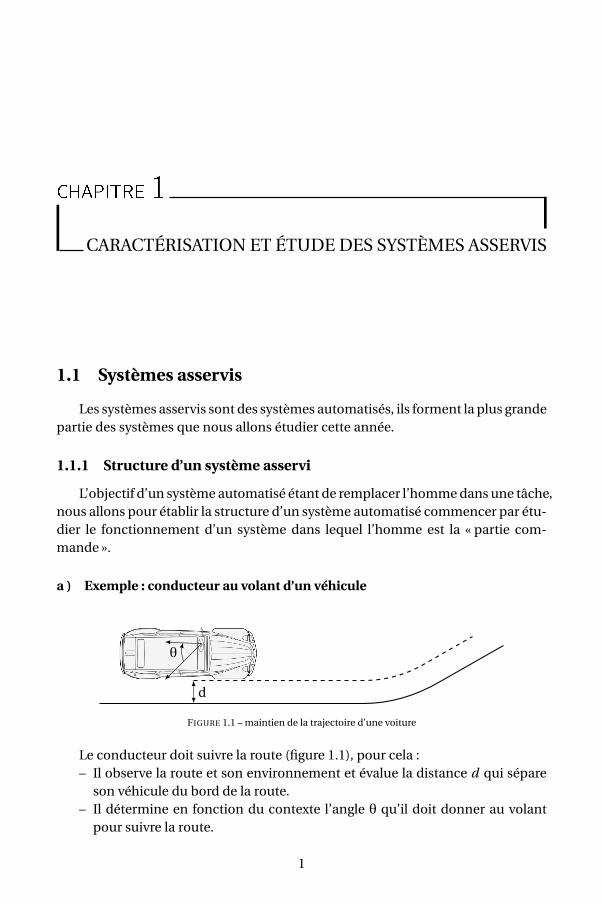
a ) Exemple : conducteur au volant d’un véhicule
θ
d
FIGURE 1.1 – maintien de la trajectoire d’une voiture
Le conducteur doit suivre la route (figure 1.1), pour cela :– Il observe la route et son environnement et évalue la distance d qui sépare
son véhicule du bord de la route.– Il détermine en fonction du contexte l’angle θ qu’il doit donner au volant
pour suivre la route.
1

2 1 Caractérisation et étude des systèmes asservis
– Il agit sur le volant (donc sur le système), la rotation du volant est transmiseaux roues via la colonne de direction.
– puis de nouveau il recommence son observation pendant toute la durée dudéplacement.
– Si un coup de vent dévie le véhicule, après avoir observé et mesuré l’écart ilagit pour s’opposer à cette perturbation le plus rapidement possible.
b ) Schéma fonctionnel
Le fonctionnement peut être traduit par le schéma de la figure 1.2.
Comparer Déterminer Agir Transmettre
Mesurer
consigneε
erreurθ d
d’
perturbations
(a) Schéma fonctionnel
Comparateur Régulateur Actionneur Effecteur
Capteur
consigneε
erreurθ d
d’
perturbations
(b) Constituants
FIGURE 1.2 – Schémas caractéristiques d’un asservissement
Les schémas de la figure 1.2 présente la structure classique d’un système asser-vis, on y retrouve la structure générique que nous avons détaillée dans le chapitreprécédent (figure ??). Elle fait apparaître une chaine directe d’action et boucle derétroaction.
Un capteur mesure en permanence l’évolution de la sortie à contrôler (ici ladistance d) et en retourne une image (d ′) à la partie commande qui la compare àla consigne. En fonction de l’erreur (ε), le système va déterminer la nouvelle loi decommande (ici θ) et agir.
1.1 Systèmes asservis 3
c ) Constituants et signaux
Comparateur : le comparateur est chargé de comparer la consigne et l’image dela grandeur à asservir. À la sortie du comparateur, on trouve l’erreur (ouécart) entre ces deux informations.
Partie commande ou régulateur : la partie commande, le régulateur, le contrô-leur, détermine la loi de commande à partir de l’erreur et de son évolution.
Actionneur : c’est l’organe d’action qui apporte l’énergie au système pour pro-duire l’effet souhaité. Il est en général associé à un pré-actionneur qui per-met de moduler l’énergie.
Capteur : le capteur prélève sur le système la grandeur réglée ( information phy-sique ) et la transforme en un signal compréhensible par le régulateur. Laprécision et la rapidité sont deux caractéristiques importantes du capteur.
Effecteur : L’effecteur rassemble l’ensemble des constituants qui vont permettred’obtenir la sortie à partir de l’énergie fournie par l’actionneur. On trouverapar exemple dans un asservissement qui agit sur de l’énergie mécanique :– un réducteur à engrenages,– un système de transmission à poulie et courroies ou à chaîne,– un mécanisme bielle manivelle,– un système vis-écrou,– . . .
Consigne : la consigne, est la grandeur réglante du système, c’est ce que l’on veutobtenir.
Sortie régulée : la sortie régulée représente le phénomène physique que doit ré-gler le système, c’est la raison d’être du système.
Perturbation : on appelle perturbation tout phénomène physique intervenantsur le système qui modifie l’état de la sortie. Un système asservi doit pou-voir maintenir la sortie a son niveau indépendamment des perturbations.
Écart, erreur : on appelle écart ou erreur, la différence entre la consigne et la sor-tie. Cette mesure ne peut être réalisée que sur des grandeurs comparables,on la réalisera donc en général entre la consigne et la mesure de la sortie.
1.1.2 Régulation et asservissement
On considère deux types principaux de systèmes asservis.
Régulation : on appelle régulation un système asservi qui doit maintenir constantela sortie conformément à la consigne (constante) indépendamment des per-turbations (régulation de température d’un four, régulateur de vitesse, . . .).
Asservissement : on appelle asservissement un système asservi dont la sortie doitsuivre le plus fidèlement possible la consigne quelle que soit son évolution(suivi de trajectoire d’un robot, asservissement de vitesse).
4 1 Caractérisation et étude des systèmes asservis
1.2 Caractéristiques d’un système asservi
1.2.1 Exemples de cahiers des charges de SA
– Four : Un four électrique doit atteindre la température de consigne à 10°Cprès en moins de 30 min puis la maintenir sans fluctuation. À l’ouverture dela porte la température ne doit pas chuter.
– Robot d’assemblage 1 : Un robot assure l’assemblage de deux pièces, la pre-mière arrive sur un tapis et s’arrête devant le poste d’assemblage. Le robotsaisit l’autre pièce sur un tapis d’amenage et la positionne sur la première.La précision d’assemblage est de 0,2 mm.
– Robot d’assemblage 2 : Afin d’améliorer la productivité du poste précédent,on ne souhaite plus arrêter la première pièce et réaliser l’assemblage de ma-nière dynamique.
– Suspension : La suspension active doit assurer une hauteur de caisse constantequelle que soit la charge du véhicule et doit absorber les défauts de la route.Le nombre des oscillations résiduelles ne doit pas être supérieur à 3.
Nous voyons au travers de ces quelques extraits de cahier de charges les carac-téristiques que l’on peut attendre d’un système asservi :
– Le temps de réponse du four est de 30 min ;– Le système de régulation du four doit permettre de rejeter les perturbations
(ouverture de la porte) ;– La précision est une qualité importante pour le four (10°C près), le premier
robot ( 0,2 mm). Pour ces deux systèmes, il s’agit de l’erreur à une entréeconstante (la température, la position), pour le deuxième robot, il doit êtreprécis pendant le mouvement (suivi de trajectoire).
– Le système peut autoriser ou non les oscillations avant la stabilisation etbien sûr tous ces systèmes doivent être stables.
1.2.2 Les signaux canoniques
Pour étudier le comportement d’un système asservi, on le sollicite avec dessignaux canoniques qui permettent de caractériser des fonctionnements particu-liers.
a ) Échelon - Heaviside
L’échelon est le signal de base d’étude des systèmes asservis. Il permet d’étu-dier le comportement du système lorsqu’on on lui applique une consigne constante.
Il est généralement noté u(t )L’échelon unitaire est appelé fonction de Heaviside et parfois noté H(t ).
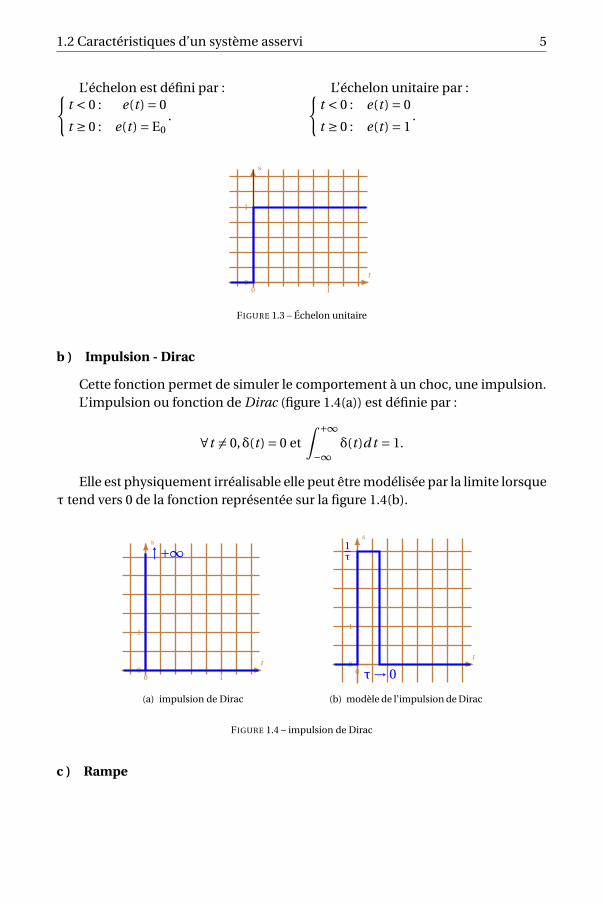
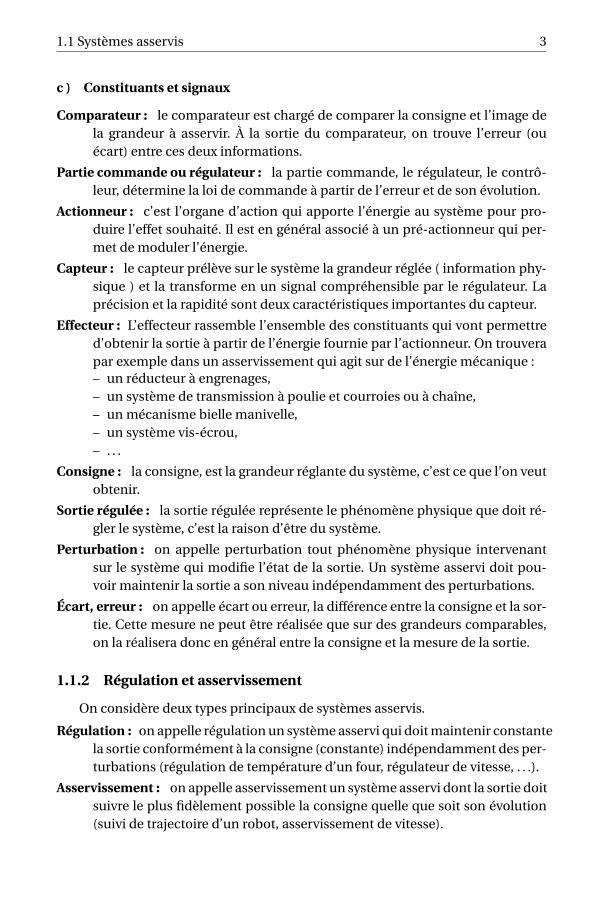
1.2 Caractéristiques d’un système asservi 5
L’échelon est défini par :t < 0 : e(t ) = 0
t ≥ 0 : e(t ) = E0.
L’échelon unitaire par :t < 0 : e(t ) = 0
t ≥ 0 : e(t ) = 1.
t
s
0 10
1
FIGURE 1.3 – Échelon unitaire
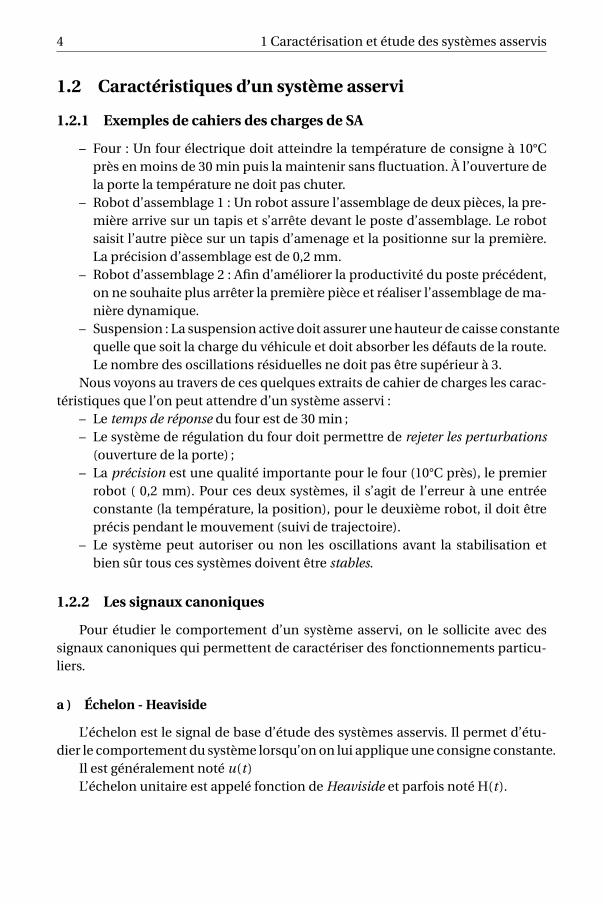
b ) Impulsion - Dirac
Cette fonction permet de simuler le comportement à un choc, une impulsion.L’impulsion ou fonction de Dirac (figure 1.4(a)) est définie par :
∀t 6= 0,δ(t ) = 0 et
ˆ +∞
−∞δ(t )d t = 1.
Elle est physiquement irréalisable elle peut être modélisée par la limite lorsqueτ tend vers 0 de la fonction représentée sur la figure 1.4(b).
t
s
0 10
1
↑ +∞
(a) impulsion de Dirac
t
s
0 10
1
1τ
τ→ 0
(b) modèle de l’impulsion de Dirac
FIGURE 1.4 – impulsion de Dirac
c ) Rampe

6 1 Caractérisation et étude des systèmes asservis
L’entrée en rampe permet d’étudierle comportement dynamique d’un sys-tème et principalement sa capacité àsuivre une consigne variable. La rampeest définie par :
t < 0 : e(t ) = 0
t ≥ 0 : e(t ) = a · t. t
s
0 10
1
FIGURE 1.5 – Rampe
d ) Sinusoïdal
L’entrée sinusoïdale permet d’étu-dier le comportement fréquentiel dusystème en faisant varier la pulsation dusignal.
Le signal sinusoïdal est défini par :t < 0 : e(t ) = 0
t ≥ 0 : e(t ) = a · sinω · t
t
s
0 1 20
1
FIGURE 1.6 – Rampe
1.2.3 Précision
La précision est caractérisée par l’écart entre la consigne et la sortie. La pré-cision peut être soit absolue, soit relative, elle est toujours définie par rapport àun type de sollicitation : un échelon si on souhaite caractériser la réponse pourune consigne constante, une rampe si on souhaite étudier le comportement dy-namique.
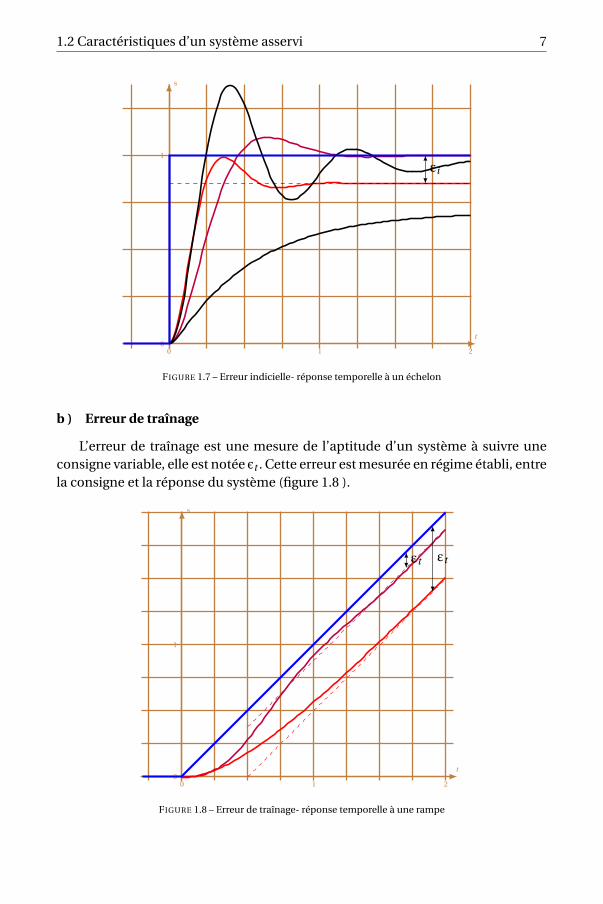
a ) Erreur indicielle
L’erreur indicielle est mesurée entre la valeur finale de la réponse du systèmeen régime établi (à l’infini) et la consigne en échelon unitaire. La figure 1.7 montrela réponse de plusieurs systèmes à un échelon unitaire.
L’erreur indicielle est notée εi , par abus de langage, elle est souvent notée εs etappelée erreur statique.
1.2 Caractéristiques d’un système asservi 7
t
s
0 1 20
1
εi
FIGURE 1.7 – Erreur indicielle- réponse temporelle à un échelon
b ) Erreur de traînage
L’erreur de traînage est une mesure de l’aptitude d’un système à suivre uneconsigne variable, elle est notée εt . Cette erreur est mesurée en régime établi, entrela consigne et la réponse du système (figure 1.8 ).
t
s
0 1 20
1
εt εt
FIGURE 1.8 – Erreur de traînage- réponse temporelle à une rampe

8 1 Caractérisation et étude des systèmes asservis
1.2.4 Rapidité
La rapidité d’un système caractérise le temps mis par le système à atteindre lavaleur finale pour une entrée en échelon.ce n’est théoriquement qu’au bout d’untemps infini que le régime permanent est atteint. Néanmoins, pour chiffrer en pra-tique la rapidité du régime transitoire, on a l’habitude de considérer le temps deréponse à 5% ; c’est le temps au bout duquel le système a atteint son régime per-manent à 5% près et à partir duquel il ne s’en écarte pas de plus de 5%. De la mêmemanière on peut définir les temps de réponse à 10% et à 2%.
La figure 1.9 montre pour trois réponses temporelles :
– la courbe 1 est caractéristique d’un système non oscillant, le temps de ré-ponse à 5% de ce système est : T5% = T1. À partir de l’instant T1 la réponseest toujours comprise entre les deux bandes à ±5% de la valeur finale.
– les courbes 2 et 3 sont caractéristiques d’un système dont la réponse est os-cillatoire amortie. Les instants T2 et T3 correspondent aux temps de réponseà 5% des réponses 2 et 3.
t
s
0 10
1
1
23
-5%
+5%
T2T3 T1
FIGURE 1.9 – Temps de réponse
On constate en comparant les réponses des systèmes 2 et 3 que les temps de ré-ponses sont comparables mais que le comportement est lui fortement différents.Le système 3 est fortement oscillant et semble plus « dynamique » que le système 2.Le temps de réponse, tel qu’il est défini ne permet pas de différencier ces deux sys-tèmes. Pour les différencier, il est possible de déterminer le temps de montée Tm
que l’on détermine en mesurant l’intervalle de temps séparant les instants aux-quels la réponse indicielle vaut 10% et 90% de la valeur finale (ou entre 20% et80%). On remarque sur la figure 1.10 que les deux temps de montée Tm2 et Tm3
sont notablement différents.

1.2 Caractéristiques d’un système asservi 9
t
s
0 10
1
23
-5%+5%
90%
10%
T2 T3Tm2Tm3
FIGURE 1.10 – Temps de montée
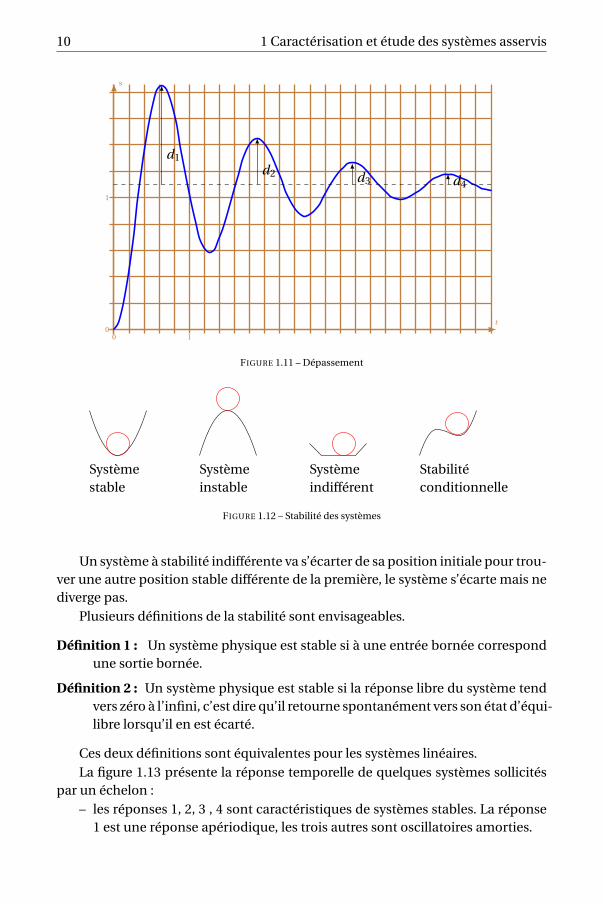
1.2.5 Dépassements
La mesure du dépassement relatif des systèmes oscillatoires amortis permetd’évaluer le taux d’oscillation du système. L’amplitude du dépassement et la rapi-dité de décroissance caractérise la stabilité relative.
Le dépassement relatif est déterminé pour chaque dépassement de la valeurfinale (figure 1.11)
Di % = S(tmi )−S(∞)
S(∞)= di
(∞)
avec
– Di % : le dépassement relatif pour le ime maximum.– tmi : l’instant du ime maximum.– S(∞) : la valeur finale.– S(tmi ) : la valeur du ime maximum.– di = S(tmi )−S(∞).
Un critère important de réglage peut être l’absence de dépassement.
1.2.6 Stabilité
La stabilité est la plus importante des caractéristiques que doit posséder unsystème asservi.
Une manière intuitive de préciser la notion de stabilité est d’imaginer un sys-tème que l’on écarte de sa position initiale par une impulsion et de regarder sonévolution, s’il retrouve sa position initiale, il est stable, s’il s’en écarte, il est in-stable(figure 1.12).
10 1 Caractérisation et étude des systèmes asservis
t
s
0 10
1
d1d2 d3 d4
FIGURE 1.11 – Dépassement
Système Système Système Stabilitéstable instable indifférent conditionnelle
FIGURE 1.12 – Stabilité des systèmes
Un système à stabilité indifférente va s’écarter de sa position initiale pour trou-ver une autre position stable différente de la première, le système s’écarte mais nediverge pas.
Plusieurs définitions de la stabilité sont envisageables.
Définition 1 : Un système physique est stable si à une entrée bornée correspondune sortie bornée.
Définition 2 : Un système physique est stable si la réponse libre du système tendvers zéro à l’infini, c’est dire qu’il retourne spontanément vers son état d’équi-libre lorsqu’il en est écarté.
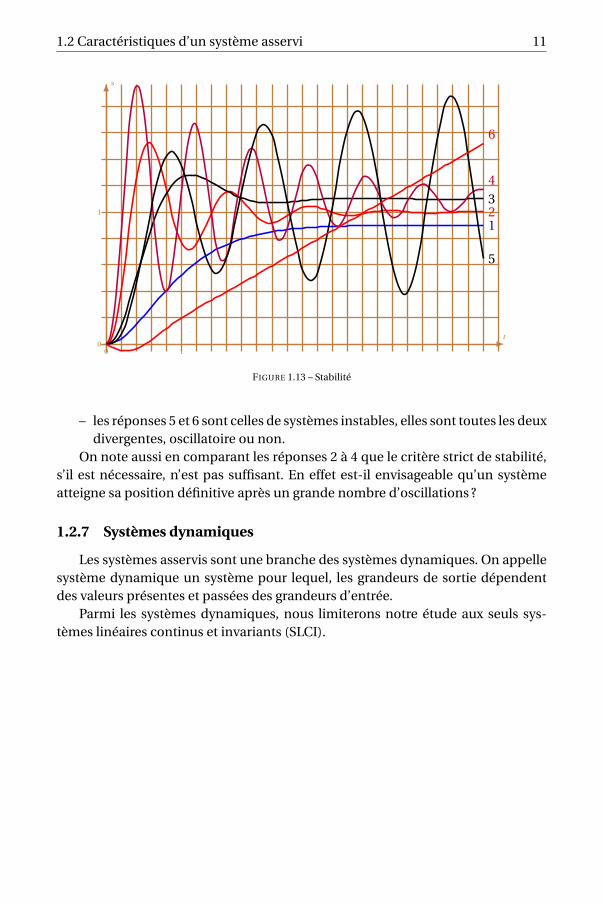
Ces deux définitions sont équivalentes pour les systèmes linéaires.La figure 1.13 présente la réponse temporelle de quelques systèmes sollicités
par un échelon :– les réponses 1, 2, 3 , 4 sont caractéristiques de systèmes stables. La réponse
1 est une réponse apériodique, les trois autres sont oscillatoires amorties.
1.2 Caractéristiques d’un système asservi 11
t
s
0 10
1 21
34
5
6
FIGURE 1.13 – Stabilité
– les réponses 5 et 6 sont celles de systèmes instables, elles sont toutes les deuxdivergentes, oscillatoire ou non.
On note aussi en comparant les réponses 2 à 4 que le critère strict de stabilité,s’il est nécessaire, n’est pas suffisant. En effet est-il envisageable qu’un systèmeatteigne sa position définitive après un grande nombre d’oscillations ?
1.2.7 Systèmes dynamiques
Les systèmes asservis sont une branche des systèmes dynamiques. On appellesystème dynamique un système pour lequel, les grandeurs de sortie dépendentdes valeurs présentes et passées des grandeurs d’entrée.
Parmi les systèmes dynamiques, nous limiterons notre étude aux seuls sys-tèmes linéaires continus et invariants (SLCI).
12 1 Caractérisation et étude des systèmes asservis
1.3 Systèmes linéaires continus invariants
1.3.1 Systèmes linéaires
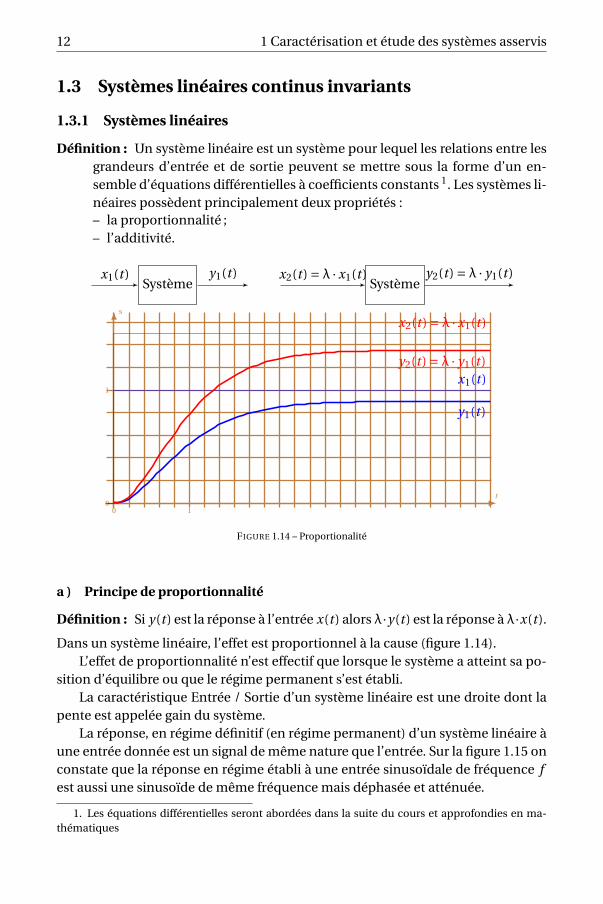
Définition : Un système linéaire est un système pour lequel les relations entre lesgrandeurs d’entrée et de sortie peuvent se mettre sous la forme d’un en-semble d’équations différentielles à coefficients constants 1. Les systèmes li-néaires possèdent principalement deux propriétés :– la proportionnalité ;– l’additivité.
Systèmex1(t ) y1(t )
Systèmex2(t ) = λ · x1(t ) y2(t ) = λ · y1(t )
t
s
0 10
1
y1(t )
x1(t )y2(t ) = λ · y1(t )
x2(t ) = λ · x1(t )
FIGURE 1.14 – Proportionalité
a ) Principe de proportionnalité
Définition : Si y(t ) est la réponse à l’entrée x(t ) alorsλ·y(t ) est la réponse àλ·x(t ).
Dans un système linéaire, l’effet est proportionnel à la cause (figure 1.14).L’effet de proportionnalité n’est effectif que lorsque le système a atteint sa po-
sition d’équilibre ou que le régime permanent s’est établi.La caractéristique Entrée / Sortie d’un système linéaire est une droite dont la
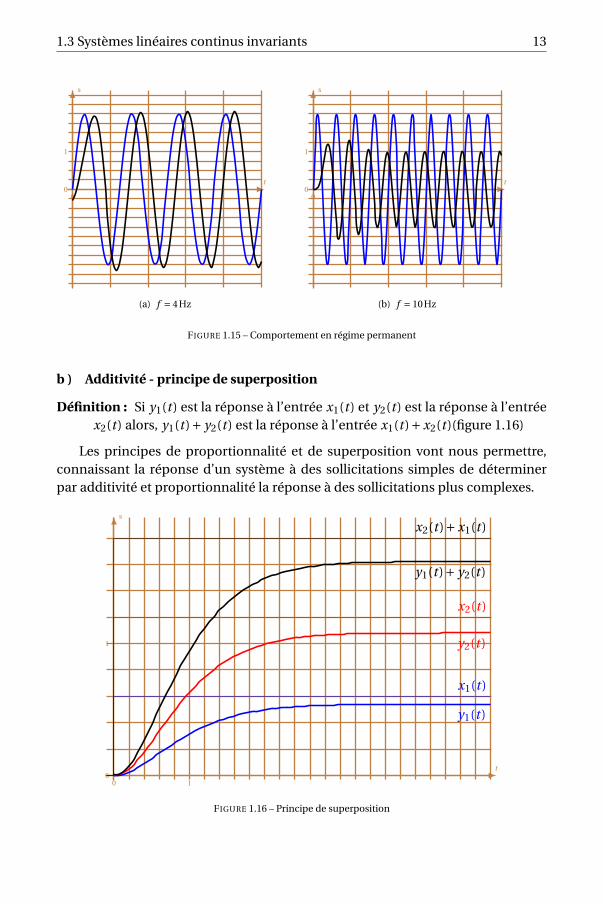
pente est appelée gain du système.La réponse, en régime définitif (en régime permanent) d’un système linéaire à
une entrée donnée est un signal de même nature que l’entrée. Sur la figure 1.15 onconstate que la réponse en régime établi à une entrée sinusoïdale de fréquence fest aussi une sinusoïde de même fréquence mais déphasée et atténuée.
1. Les équations différentielles seront abordées dans la suite du cours et approfondies en ma-thématiques
1.3 Systèmes linéaires continus invariants 13
t
s
0 10
1
(a) f = 4Hz
t
s
0 10
1
(b) f = 10Hz
FIGURE 1.15 – Comportement en régime permanent
b ) Additivité - principe de superposition
Définition : Si y1(t ) est la réponse à l’entrée x1(t ) et y2(t ) est la réponse à l’entréex2(t ) alors, y1(t )+ y2(t ) est la réponse à l’entrée x1(t )+x2(t )(figure 1.16)
Les principes de proportionnalité et de superposition vont nous permettre,connaissant la réponse d’un système à des sollicitations simples de déterminerpar additivité et proportionnalité la réponse à des sollicitations plus complexes.
t
s
0 10
1
y1(t )
x1(t )
y2(t )
x2(t )
y1(t )+ y2(t )
x2(t )+x1(t )
FIGURE 1.16 – Principe de superposition
14 1 Caractérisation et étude des systèmes asservis
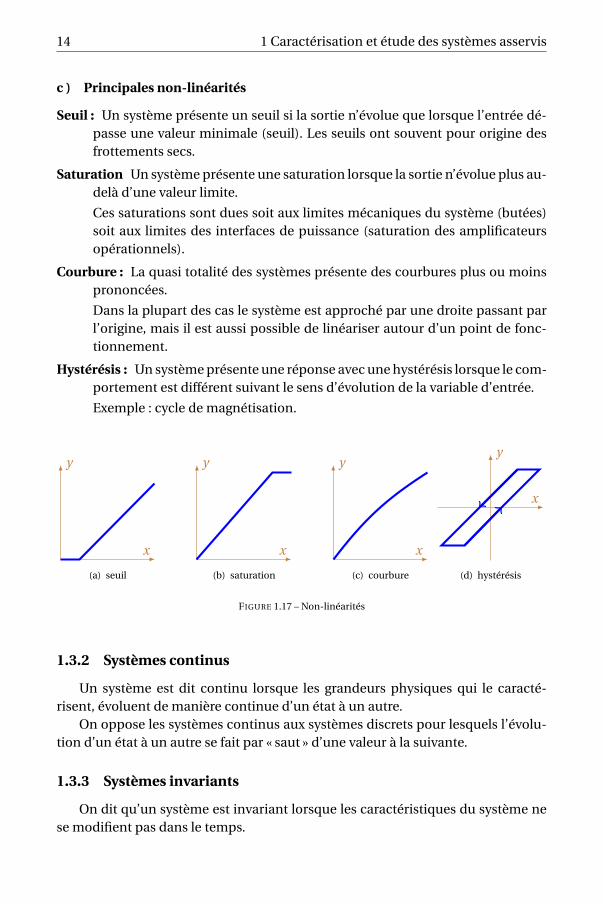
c ) Principales non-linéarités
Seuil : Un système présente un seuil si la sortie n’évolue que lorsque l’entrée dé-passe une valeur minimale (seuil). Les seuils ont souvent pour origine desfrottements secs.
Saturation Un système présente une saturation lorsque la sortie n’évolue plus au-delà d’une valeur limite.
Ces saturations sont dues soit aux limites mécaniques du système (butées)soit aux limites des interfaces de puissance (saturation des amplificateursopérationnels).
Courbure : La quasi totalité des systèmes présente des courbures plus ou moinsprononcées.
Dans la plupart des cas le système est approché par une droite passant parl’origine, mais il est aussi possible de linéariser autour d’un point de fonc-tionnement.
Hystérésis : Un système présente une réponse avec une hystérésis lorsque le com-portement est différent suivant le sens d’évolution de la variable d’entrée.
Exemple : cycle de magnétisation.
x
y
(a) seuil
x
y
(b) saturation
x
y
(c) courbure
x
y
(d) hystérésis
FIGURE 1.17 – Non-linéarités
1.3.2 Systèmes continus
Un système est dit continu lorsque les grandeurs physiques qui le caracté-risent, évoluent de manière continue d’un état à un autre.
On oppose les systèmes continus aux systèmes discrets pour lesquels l’évolu-tion d’un état à un autre se fait par « saut » d’une valeur à la suivante.
1.3.3 Systèmes invariants
On dit qu’un système est invariant lorsque les caractéristiques du système nese modifient pas dans le temps.
1.4 Description des systèmes linéaires 15
Les systèmes réels ne sont ni linéaires, ni continus, ni invariants
Il est par contre toujours possible de modéliser correctement le système afinque celui ci puisse être considéré comme linéaire, continu et invariant dans lazone d’étude.
1.4 Description des systèmes linéaires
Pour réaliser la commande d’un système, il est nécessaire d’établir les rela-tions existant entre les entrées (variables de commande) et les sorties (variablesd’observation), c’est à dire être capable de modéliser le problème permettant derépondre à une question du type : Comment doit-on régler la chaudière pour avoirune température de 20 C ?
L’ensemble de ces relations s’appelle le « modèle mathématiques » du systèmeou modèle de connaissance.
1.4.1 Description par les équations différentielles
Un système dynamique linéaire peut être décrit par une équation différentielleà coefficients constants liant les grandeurs d’entrée et de sortie.
L’équation générale d’un système linéaire est de la forme :
bmdm y(t )
dtm +bm−1dm−1 y(t )
dtm−1 +·· ·+b1d y(t )
dt+b0 · y(t ) = an
dn x(t )
dtn +an−1dm−1 x(t )
dtm−1
+·· ·+a1d x(t )
dt+a0 · x(t )
on note :
d y(t )
dt= y(t ) dérivée 1re de y(t ) par rapport au temps
d2 y(t )
dt2 = y(t ) dérivée 2nd de y(t ) par rapport au temps
dn y(t )
dtn dérivée nme de y(t ) par rapport au temps
Pour les systèmes réels, m ≥ n (principe de causalité 2)
À partir de cette représentation il est possible de déterminer l’évolution tem-porelle de la sortie en résolvant l’équation différentielle.
2. nous verrons plus loin dans le cours

16 1 Caractérisation et étude des systèmes asservis
1.4.2 Résolution par la transformée de Laplace
L’utilisation de la transformée de Laplace permet de ramener la résolutiond’une équation différentielle a une manipulation algébrique puis à la lecture d’untableau de fonctions.
Remarque : : pour toute cette partie et pour toute la suite, il est nécessaire debien assimiler le cours sur la transformation de Laplace en annexe ??.
a ) Exemple guide - Sismographe
Un sismographe est un instrument de mesure équipé d’un capteur des mou-vements du sol, le sismomètre, capable de les enregistrer sur un support visuel, lesismogramme.
Un sismographe simple est constitué d’un ressort de raideur k et de longueurnaturelle l0, d’un amortisseur de coefficient de frottement h et d’une masse M (m)considérée comme ponctuelle.
Le ressort et l’amortisseur sont fixés à un cadre(C) rigide solidaire du sol(S).L’amortisseur exerce sur la masse M une force de frottement fluide proportion-nelle à la vitesse relative de M par rapport au cadre.
Un stylet reproduisant les déplacements verticaux de la masse M par rapportau cadre est fixé au niveau de la masse M (voir figure 1.18).
On considère que l’axe vertical #»zg est un des axes du référentiel galiléen.
M
Og
#»zg
Z(t)
z(t )
(a) Schéma
– M = 10kg : masse de la masse M,– k = 36kN m−1 : raideur du ressort,– l0 : longueur à vide du ressort,– h : coefficient de frottement fluide
avec les valeurs suivantes :h1 = 2000N s m−1, h2 = 1200N s m−1,h3 = 600N s m−1.
(b) Données
FIGURE 1.18 – Sismomètre
On note, Z(t ) le mouvement du sol et z(t ) le mouvement du stylet. Le mouve-ment du stylet dépend de la sollicitation (Z(t )), de la masse et des caractéristiquesressort et de l’amortisseur.

1.4 Description des systèmes linéaires 17
Q1. Détermination de l’équation différentielle liant du mouvement liant Z(t ) etz(t ).
Pour établir l’équation différentielle, nous allons appliquer la deuxième loi deNewton 3 (Principe Fondamental de la Dynamique en Translation) qui s’énonce :Dans un référentiel galiléen, la variation de la quantité de mouvement est égale àla somme des forces extérieures qui s’exercent sur le solide :∑ # »
Fext =[
d
dt# »pS/Rg
]Rg
que l’on peut aussi écrire : ∑ # »Fext = M · # »aS/Rg
avec # »aS/Rg l’accélération du solide par rapport au référentiel galiléen.La masse est soumise à 3 actions mécaniques :– son poids
#»P = M · g · #»zg
– l’action du ressort qui s’oppose à sa déformation
#»Fr =−k · (z − l0) · #»zg
– l’action de l’amortisseur, force de frottement fluide proportionnelle à la vi-tesse relative de M par rapport au cadre :
# »Fa =−h · d z
dt· #»zg =−h · z(t ) · #»zg
Il reste à déterminer l’accélération de la masse M par rapport au référentielgaliléen : # »aS/Rg .
La masse M se déplace verticalement, la projection sur #»zg dans le référentielgaliléen est :
# »Og M · #»zg = Z(t )+ z(t ).
Pour un mouvement de translation vertical, l’accélération est la dérivée se-conde du déplacement, soit :
# »aS/Rg =(
d2 Z(t )
dt2 + d2 z(t )
dt2
)#»zg = (
Z(t )+ z(t ))
#»zg .
Le principe fondamental de la dynamique en translation s’écrit donc :
M · d2 Z(t )
dt2 +M · d2 z(t )
dt2 = M · g −k · (z − l0)−h · d z
dt
en réorganisant :
M · d2 z(t )
dt2 +h · d z
dt+k · z =−M · d2 Z(t )
dt2 +M · g +k · l0
3. vu en TS dans le cours de physique

18 1 Caractérisation et étude des systèmes asservis
À l’équilibre (pas de mouvement),d2 z(t )
dt2 = 0,d2 Z(t )
dt2 = 0 ,d z
dt= 0 et z = ze , on
peut écrire
k · ze = M · g +k · l0
On pose z = ze = 0 à l’équilibre, donc :
M · g +k · l0 = 0
L’équation différentielle se simplifie donc en :
M · d2 z(t )
dt2 +h · d z(t )
dt+k · z =−M · d2 Z(t )
dt2
M · z(t )+h · z(t )+k · z(t ) =−M · Z(t )
L’équation du mouvement est une équation différentielle du second ordre (dé-rivée seconde) à coefficients constants.
La sortie est ici z(t ), c’est à dire le tracé du stylet sur le rouleau, il dépend de lasollicitation, l’entrée ici, Z(t ) et des coefficients de l’équation.
Il ne reste plus qu’à la résoudre !Q2. Résolution de l’équation différentielle
L’annexe ?? présente les principes de la résolution des équations différentielles.On reconnaît une équation différentielle du second ordre à coefficients constants
avec un second membre.Déterminons dans un premier temps la solution générale de l’équation sans
second membre :
M · z(t )+h · z(t )+k · z(t ) = 0
L’équation caractéristique est
M · r 2 +h · r +k = 0
∆= h2 −4 ·k ·MCompte tenu des valeurs numériques de h (figure 1.18(b)), ∆ prend les valeurs
suivantes :– pour h1 = 2000 ,
∆1 = 2560000 > 0soit deux racines réelles
r1 = −h +p∆1
2 ·M=−20
r2 = −h −p∆1
2 ·M=−180
La solution générale de l’équation différentielle sans second membre estdonc :
z(t ) = A1 ·e−180·t +A2 ·e−20·t

1.4 Description des systèmes linéaires 19
– pour h2 = 1200
∆2 = 0une racine double
r = −h −p∆2
2 ·M=−60
La solution générale de l’équation différentielle sans second membre estdonc :
z(t ) = (A1 +A2 · t ) ·e−60·t
– pour h3 = 600 :
∆3 =−1080000 < 0soit deux racines complexes :
r1 = −h + i ·p|∆3|2 ·M
=−30 · (1+ i ·p3)
r2 = −h − i ·p|∆3|2 ·M
=−30 · (1− i ·p3)
La solution générale de l’équation différentielle sans second membre estdonc :
z(t ) =(A1 · sin(30 ·p3 · t )+A2 ·cos(30 ·p3 · t )
)·e−30·t
Le sismomètre est soumis à une accélération sinusoïdale de pulsation ω etd’amplitude A0 :
Z(t ) = Γ0 · sin(ω · t )
Q3. Déterminer la réponse temporelle pour chacune des valeurs du coefficient defrottement fluide.
L’équation différentielle devient, avec le second membre
M · d2 z(t )
dt2 +h · d z(t )
dt+k · z(t ) =−M ·Γ0 · sin(ω · t )
On recherche une solution particulière de la même forme que le second membre :
zp (t ) = A · sin(ω · t )+B ·cos(ω · t )
d zp (t )
dt= A ·ω ·cos(ω · t )−B ·ω · sin(ω · t )
d zp (t )
dt=−A ·ω2 · sin(ω · t )−B ·ω2 ·cos(ω · t )
en substituant dans l’équation différentielle :
M · (−A ·ω2 · sin(ω · t )−B ·ω2 ·cos(ω · t ))
+h · (A ·ω ·cos(ω · t )−B ·ω · sin(ω · t ))
+k · (A · sin(ω · t )+B ·cos(ω · t )) =−M ·A0 ·Γ0 · sin(ω · t )

20 1 Caractérisation et étude des systèmes asservis
M ·B ·ω2 ·cos(ω · t )−M ·A ·ω2 · sin(ω · t )
+h ·A ·ω ·cos(ω · t )−h ·B ·ω · sin(ω · t )
+k ·B ·cos(ω · t )+ (k ·A · sin(ω · t ) =−M ·A0 ·Γ0 · sin(ω · t )
(−M ·B ·ω2 +h ·A ·ω+k ·B) ·cos(ω · t )
+(−M ·A ·ω2 −h ·B ·ω+k ·A) · sin(ω · t ) =−M ·Γ0 · sin(ω · t )
((k −M ·ω2) ·B+h ·A ·ω) ·cos(ω · t )
+(−h ·B ·ω+ (k −M ·ω2) ·A
) · sin(ω · t ) =−M ·Γ0 · sin(ω · t )
h ·ω ·A+ (
k −M ·ω2) ·B = 0
−h ·ω ·B+ (k −M ·ω2
) ·A =−M ·Γ0⇒
B =− h ·ωk −M ·ω2 ·A
A = M ·Γ0 ·(k −M ·ω2
)h2 ·ω2 + (
k −M ·ω2)2
Q4. Déterminer la solution générale avec les conditions initiales suivantes :z(0) = 0 et z(0) = 0 pour h = 1200.
La solution générale est la somme de la solution générale sans second membreet la solution particulière :
z(t ) = (A1 +A2 · t ) ·e−60·t +A · sin(ω · t )+B ·cos(ω · t )
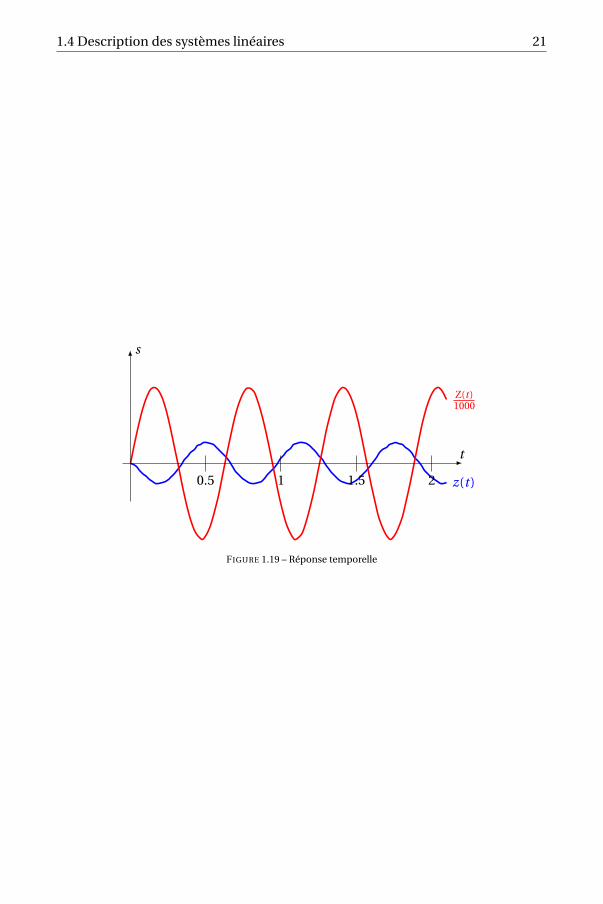
les deux constantes A1 et A2 sont déterminées à partir des conditions initiales, onobtient (pour Γ0 = 1 et ω= 10) :
z(t ) =(− 3
34225− 1
370· t
)·e−60·t + 3
34225·cos(10 · t )− 7
27380· sin(10 · t )
La réponse temporelle (figure 1.19) montre que la sortie en régime permanentest de même période que le signal d’entrée mais déphasée et atténuée.
Nous voyons avec cet exemple que la résolution d’un système linéaire peuts’avérer relativement complexe.
Il n’est pas d’usage en automatique d’utiliser cette méthode, on préfère l’utili-sation de la transformée de Laplace.
1.4 Description des systèmes linéaires 21
z(t )
Z(t )1000
t
s
0.5 1 1.5 2
FIGURE 1.19 – Réponse temporelle
22 1 Caractérisation et étude des systèmes asservis
b ) Exemple guide - Sismographe - 2
On reprend l’étude à partir de l’équation différentielle du mouvement reliantle mouvement de la masse z(t ) en fonction de l’accélération verticale du boitierγZ(t ).
M · d2 z(t )
dt2 +h · d z(t )
dt+k · z =−M · d2 Z(t )
dt2
M · d2 z(t )
dt2 +h · d z(t )
dt+k · z =−M ·γZ(t )
On pose : L (z(t )) = Z(p) et L(γZ(t )
)= Γ(p)Q1. On se place dans les conditions d’Heaviside, écrire l’équation différentielledans le domaine symbolique.
L’équation différentielle devient :
M ·p2 ·Z(p)+h ·p ·Z(p)+k ·Z(p) =−M ·Γ(p)
Q2. En déduire Z(p) en fonction de Γ(p)
Z(p) = −M
M ·p2 +h ·p +k·Γ(p)
On soumet le cadre à une impulsion de Dirac γZ(t ) = δ(t ).Q3. Déterminer la réponse temporelle pour les différentes valeurs de h.
On a L(γZ(t )
)= 1, l’équation devient :
Z(p) = −M
M ·p2 +h ·p +k
Compte tenu des valeurs numériques deM = 10kg et k = 36kN m−1, pour lesdifférentes valeurs de h :
– h1 = 2000N s m−1
Z(p) = −10
10 ·p2 +2000 ·p +36000= −1
p2 +200 ·p +3600
Le dénominateur admet 2 racines réelles (voir la 1re étude)
Z(p) = −1(p +180
) · (p +20)

1.4 Description des systèmes linéaires 23
La décomposition en fraction simple s’écrit :
Z(p) = A(p +180
) + B(p +20
)Par identification on obtient :
Z(p) = 1
160 · (p +180) − 1
160 · (p +20)
À partir du tableau des transformées page ??, on déduit la réponse tempo-relle pour un Dirac :
z(t ) =(
1
160·e−180·t − 1
160·e−20·t
)·u(t )
– h2 = 1200N s m−1
Z(p) = −10
10 ·p2 +1200 ·p +36000= −1
p2 +120 ·p +3600
Le dénominateur admet 1 racine double
Z(p) = −1(p +60
)2
À partir du tableau des transformées page ?? on obtient
z(t ) =−t ·e−60·t ·u(t )
– h3 = 600N s m−1
Z(p) = −1
p2 +60 ·p +3600
Le dénominateur admet 2 racines complexes conjuguées, pour déterminerla transformée inverse, on doit mettre la fraction rationnelle sous la forme :
1
ω0 ·p
1− z2e−zω0t · sin
(ω0
p1− z2.t
)Z(p) = −1
p2 +60 ·p +3600
= −1
p2 +2 ·0,5 ·60 ·p +602
soit ω0 = 60rad s−1 et z = 0,5. On retrouve la fonction temporelle à partir dutableau :
z(t ) = 1
60 ·√
1−0,52e−0,5·60·t · sin
(60
√1−0,52 · t
)·u(t )
z(t ) = 1
30 ·p3e−30·t · sin
(30 ·p3 · t
)·u(t
24 1 Caractérisation et étude des systèmes asservis
La transformée de Laplace permet donc de résoudre les équations différen-tielles à coefficients constants. Cette méthode ne permet pas de résoudre d’autreséquations que celle que l’on pourraient résoudre par la méthode classique, parcontre elle permet de prendre en compte rapidement les conditions initiales etsurtout les signaux d’entrées composés.
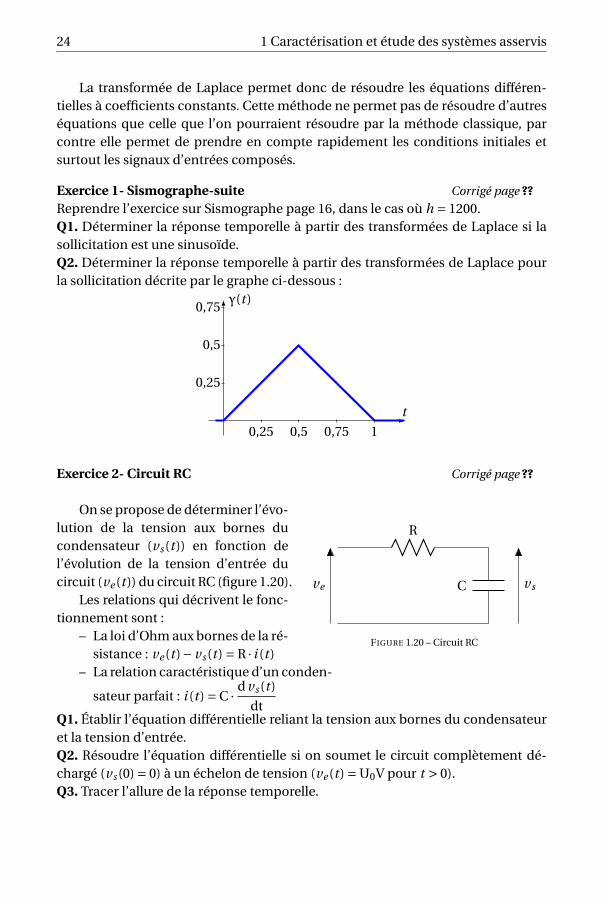
Exercice 1- Sismographe-suite Corrigé page ??
Reprendre l’exercice sur Sismographe page 16, dans le cas où h = 1200.Q1. Déterminer la réponse temporelle à partir des transformées de Laplace si lasollicitation est une sinusoïde.Q2. Déterminer la réponse temporelle à partir des transformées de Laplace pourla sollicitation décrite par le graphe ci-dessous :
t
γ(t )
0,25 0,5 0,75 1
0,25
0,5
0,75
Exercice 2- Circuit RC Corrigé page ??
R
C vsve
FIGURE 1.20 – Circuit RC
On se propose de déterminer l’évo-lution de la tension aux bornes ducondensateur (vs(t )) en fonction del’évolution de la tension d’entrée ducircuit (ve (t )) du circuit RC (figure 1.20).
Les relations qui décrivent le fonc-tionnement sont :
– La loi d’Ohm aux bornes de la ré-sistance : ve (t )− vs(t ) = R · i (t )
– La relation caractéristique d’un conden-
sateur parfait : i (t ) = C · d vs(t )
dtQ1. Établir l’équation différentielle reliant la tension aux bornes du condensateuret la tension d’entrée.Q2. Résoudre l’équation différentielle si on soumet le circuit complètement dé-chargé (vs(0) = 0) à un échelon de tension (ve (t ) = U0V pour t > 0).Q3. Tracer l’allure de la réponse temporelle.
1.5 Fonction de transfert – Transmittance 25
1.5 Fonction de transfert – Transmittance
Un système dynamique linéaire est décrit par une équation différentielle à co-efficients constants liant les grandeurs d’entrée et de sortie.
bmdm y(t )
dtm +bm−1dm−1 y(t )
dtm−1 +·· ·+b1d y(t )
dt+b0 · y(t ) = an
dn x(t )
dtn +an−1dm−1 x(t )
dtm−1
+·· ·+a1d x(t )
dt+a0 · x(t )
On se place dans les conditions de Heaviside (toutes les conditions initialessont nulles).
On pose : L (x(t )) = X(p) et L(y(t )
)= Y(p)En appliquant la transformée de Laplace aux deux membres de l’égalité les
conditions initiales étant nulles.
(bm ·pm +bm−1 ·pm−1 +·· ·+b1 ·p +b0
) ·Y(p) = (an ·pn +an−1 ·pn−1 +·· ·+a1 ·p +a0
) ·X(p)
ce qui permet d’écrire
Y(p) = an ·pn +an−1 ·pn−1 +·· ·+a1 ·p +a0
bm ·pm +bm−1 ·pm−1 +·· ·+b1 ·p +b0·X(p)
On appelle
H(p) = Y(p)
X(p)= an ·pn +an−1 ·pn−1 +·· ·+a1 ·p +a0
bm ·pm +bm−1 ·pm−1 +·· ·+b1 ·p +b0
la fonction de transfert (ou transmittance) du système.Dans le cas des systèmes physiques, le degré du dénominateur est supérieur
au degré du numérateur : m > n.
1.5.1 Forme canonique
Il est toujours possible de mettre la fonction de transfert sous la forme suivantedite forme canonique avec :
H(p) = N(p)
D(p)= K · N(p)
pα ·D1(p)= an ·pn +an−1 ·pn−1 +·· ·+a1 ·p +1
pα(bm ·pm +bm−1 ·pm−1 +·· ·+b1 ·p +1
)avec
– N(p) : un polynôme en p avec N(0) = 1 ;– D1(p) : un polynôme en p avec D1(0) = 1 ;– K : le gain de la fonction de transfert ;– α : la classe de la fonction de transfert.
26 1 Caractérisation et étude des systèmes asservis
1.5.2 Schéma bloc
À partir de la fonction de transfert, on établit le schéma bloc du système
H(p)X(p) Y(p)
soit
an ·pn +an−1 ·pn−1 +·· ·+a1 ·p +a0
bm ·pm +bm−1 ·pm−1 +·· ·+b1 ·p +b0
X(p) Y(p)
1.5.3 Pôles et zéros
On appelle
zéros : les racines de N(p) = 0, le polygone du numérateur.
pôles : les racines de D(p) = 0, le polynôme du dénominateur
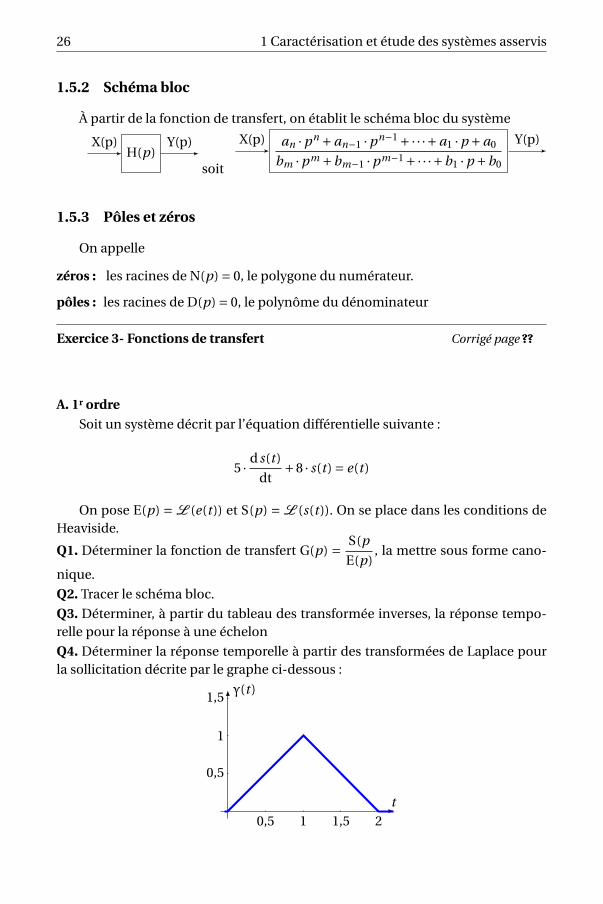
Exercice 3- Fonctions de transfert Corrigé page ??
A. 1r ordre
Soit un système décrit par l’équation différentielle suivante :
5 · d s(t )
dt+8 · s(t ) = e(t )
On pose E(p) = L (e(t )) et S(p) = L (s(t )). On se place dans les conditions deHeaviside.
Q1. Déterminer la fonction de transfert G(p) = S(p
E(p), la mettre sous forme cano-
nique.
Q2. Tracer le schéma bloc.
Q3. Déterminer, à partir du tableau des transformée inverses, la réponse tempo-relle pour la réponse à une échelon
Q4. Déterminer la réponse temporelle à partir des transformées de Laplace pourla sollicitation décrite par le graphe ci-dessous :
t
γ(t )
0,5 1 1,5 2
0,5
1
1,5
1.6 Représentation des systèmes asservis et linéaires par le schéma fonctionnel 27
B. 2nd ordreSoit un système décrit par l’équation différentielle suivante :
3 · d2 s(t )
dt2 +5 · d s(t )
dt+4 · s(t ) = de(t )
dt+8 ·e(t )
On pose E(p) = L (e(t )) et S(p) = L (s(t )). On se place dans les conditions deHeaviside.
Q5. Déterminer la fonction de transfert G(p) = S(p
E(p), la mettre sous forme cano-
nique.Q6. Tracer le schéma bloc.
1.6 Représentation des systèmes asservis et linéaires par leschéma fonctionnel
1.6.1 Schéma fonctionnel ou schéma bloc
La représentation par le schéma fonctionnel permet de représenter de manièregraphique un système linéaire.
Chaque bloc du schéma caractérise une des fonctions du système (un des consti-tuants), on associe à chaque bloc la fonction de transfert du constituant qu’il re-présente. Les arcs qui relient les blocs portent les informations d’entrée et de sortiede la fonction de transfert.
On détermine la fonction de transfert de chaque constituant à partir des équa-tions différentielles régissant son comportement. L’allure globale du schéma ren-seigne sur sa structure (boucle ouverte, boucle fermée).
Le système d’équations est ainsi remplacé par un schéma comportant un en-semble de blocs représentant les fonctions du système. Les branches entre lesblocs portent les variables intermédiaires du système.
a ) Formalisme
Bloc :
H(p)E(p) S(p)
Le bloc est représenté par un cadre rectangulaire, ilpossède une entrée et une sortie, la fonction de trans-fert du bloc est déterminée d’après les équations de
fonctionnement : H(p) = S(p)
E(p).
Jonction :
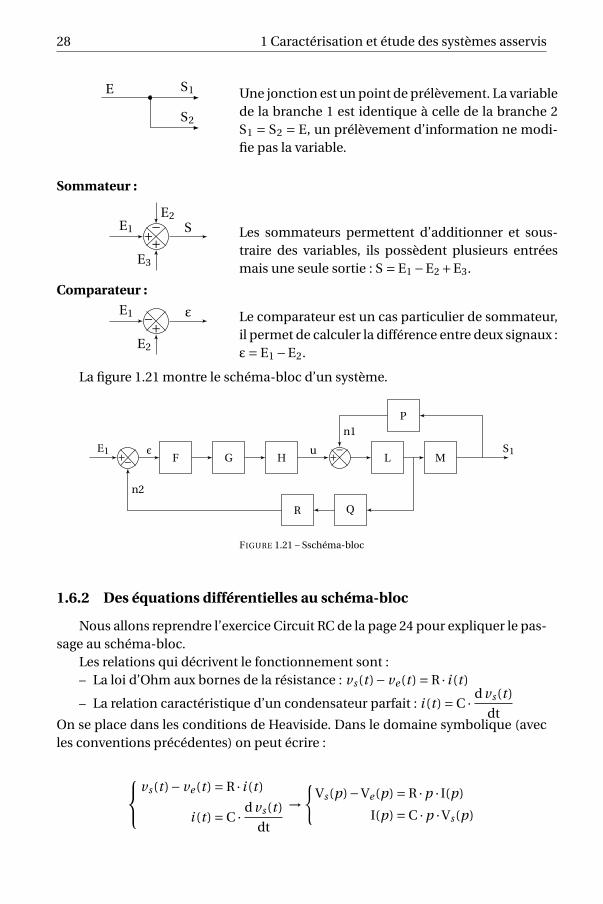
28 1 Caractérisation et étude des systèmes asservis
E S1
S2
Une jonction est un point de prélèvement. La variablede la branche 1 est identique à celle de la branche 2S1 = S2 = E, un prélèvement d’information ne modi-fie pas la variable.
Sommateur :
−++
E1
E2
E3
S Les sommateurs permettent d’additionner et sous-traire des variables, ils possèdent plusieurs entréesmais une seule sortie : S = E1 −E2 +E3.
Comparateur :
+−E1
E2
ε Le comparateur est un cas particulier de sommateur,il permet de calculer la différence entre deux signaux :ε= E1 −E2.
La figure 1.21 montre le schéma-bloc d’un système.
−+ FE1
Gε
H−+u
L MS1
P
QR
n1
n2
FIGURE 1.21 – Sschéma-bloc
1.6.2 Des équations différentielles au schéma-bloc
Nous allons reprendre l’exercice Circuit RC de la page 24 pour expliquer le pas-sage au schéma-bloc.
Les relations qui décrivent le fonctionnement sont :– La loi d’Ohm aux bornes de la résistance : vs(t )− ve (t ) = R · i (t )
– La relation caractéristique d’un condensateur parfait : i (t ) = C · d vs(t )
dtOn se place dans les conditions de Heaviside. Dans le domaine symbolique (avecles conventions précédentes) on peut écrire :
vs(t )− ve (t ) = R · i (t )
i (t ) = C · d vs(t )
dt
→
Vs(p)−Ve (p) = R ·p · I(p)
I(p) = C ·p ·Vs(p)

1.6 Représentation des systèmes asservis et linéaires par le schéma fonctionnel 29
Pour chaque équation, on trace le schéma bloc élémentaire correspondant :
I(p) = 1
R
(Vs(p)−Ve (p)
)−+
Ve (p) 1
RVs(p
I(p)
Vs(p) = 1
C ·p1
C ·p
I(p) Vs(p)
puis on associe, les différents schémas élémentaires obtenus
−+Ve (p) 1
R
1
C ·p
I(p) Vs(p)
D’où la fonction de transfert en appliquant la formule de Black dans le cas d’unretour unitaire :
Vs(p)
Ve (p)= BO(p)
1+BO(p)=
1
R ·C ·p
1+ 1
R ·C ·pVs(p)
Ve (p)= 1
1+R ·C ·p
On le voit, le schéma-bloc, est un outil très pratique qui permet d’obtenir rapi-dement la fonction de transfert d’un système complexe. Associé à la transforméede Laplace, c’est l’outil de base de l’étude des asservissements.
1.6.3 Manipulation des schémas blocs
Blocs en série : Il est possible de remplacer des blocs en série (sans jonction nisommateur entre chaque bloc) par le bloc produit des fonctions de chaquebloc. Ainsi :
Fε
G Hu = F ·G ·H
ε u)
Il est important de noter que si les blocs ont un sens physique (ils sont latraduction du comportement d’un constituant) , le bloc produit n’a lui qu’unsens mathématique.
Déplacement d’un sommateur : Il est souvent utile de déplacer un sommateur,soit pour faciliter l’analyse, soit (souvent) pour transformer un schéma blocen un schéma bloc à retour unitaire.
– Déplacement vers l’amont :
HE1 −+u
LS
R1P
n1
= −+E1H L
S
R1P
1
H n1
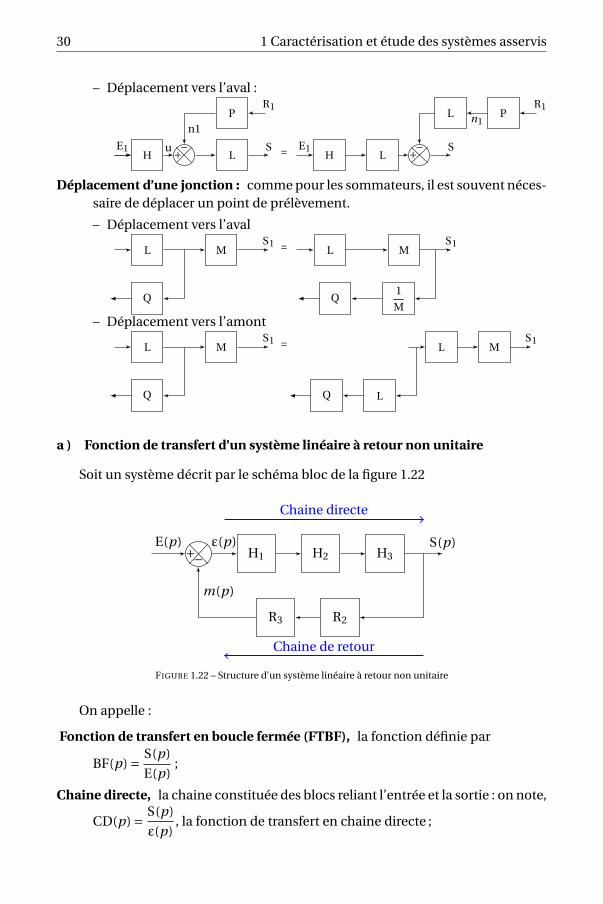
30 1 Caractérisation et étude des systèmes asservis
– Déplacement vers l’aval :
HE1 −+u
LS
R1P
n1
= HE1
L−+ S
R1PL n1
Déplacement d’une jonction : comme pour les sommateurs, il est souvent néces-saire de déplacer un point de prélèvement.
– Déplacement vers l’aval
L MS1
Q
= L MS1
1
MQ
– Déplacement vers l’amont
L MS1
Q
= L MS1
LQ
a ) Fonction de transfert d’un système linéaire à retour non unitaire
Soit un système décrit par le schéma bloc de la figure 1.22
−+ H1E(p)
H2ε(p)
H3S(p)
R2R3
m(p)
Chaine directe
Chaine de retour
FIGURE 1.22 – Structure d’un système linéaire à retour non unitaire
On appelle :
Fonction de transfert en boucle fermée (FTBF), la fonction définie par
BF(p) = S(p)
E(p);
Chaine directe, la chaine constituée des blocs reliant l’entrée et la sortie : on note,
CD(p) = S(p)
ε(p), la fonction de transfert en chaine directe ;
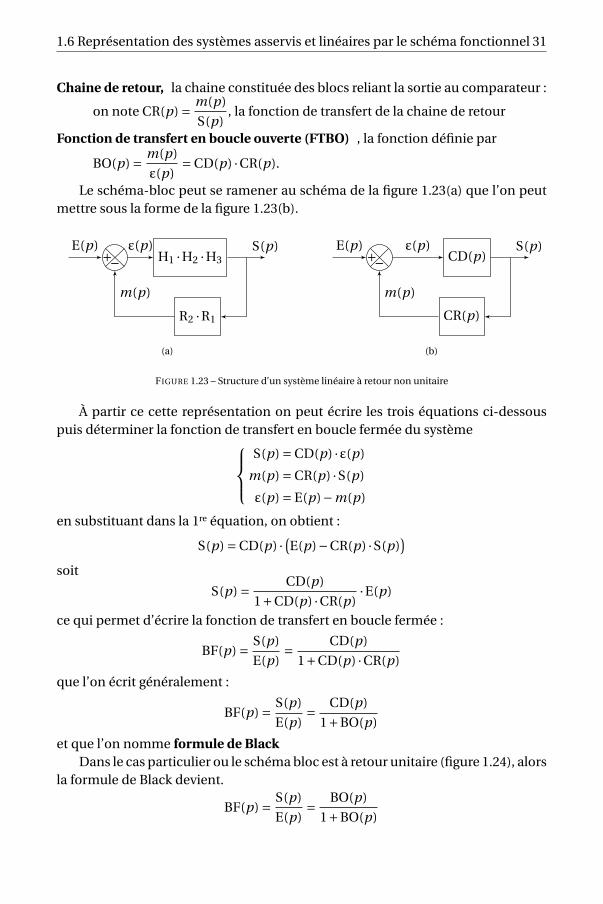
1.6 Représentation des systèmes asservis et linéaires par le schéma fonctionnel 31
Chaine de retour, la chaine constituée des blocs reliant la sortie au comparateur :
on note CR(p) = m(p)
S(p), la fonction de transfert de la chaine de retour
Fonction de transfert en boucle ouverte (FTBO) , la fonction définie par
BO(p) = m(p)
ε(p)= CD(p) ·CR(p).
Le schéma-bloc peut se ramener au schéma de la figure 1.23(a) que l’on peutmettre sous la forme de la figure 1.23(b).
−+E(p)
H1 ·H2 ·H3ε(p) S(p)
R2 ·R1
m(p)
(a)
−+E(p)
CD(p)ε(p) S(p)
CR(p)
m(p)
(b)
FIGURE 1.23 – Structure d’un système linéaire à retour non unitaire
À partir ce cette représentation on peut écrire les trois équations ci-dessouspuis déterminer la fonction de transfert en boucle fermée du système
S(p) = CD(p) ·ε(p)
m(p) = CR(p) ·S(p)
ε(p) = E(p)−m(p)
en substituant dans la 1re équation, on obtient :
S(p) = CD(p) · (E(p)−CR(p) ·S(p))
soit
S(p) = CD(p)
1+CD(p) ·CR(p)·E(p)
ce qui permet d’écrire la fonction de transfert en boucle fermée :
BF(p) = S(p)
E(p)= CD(p)
1+CD(p) ·CR(p)
que l’on écrit généralement :
BF(p) = S(p)
E(p)= CD(p)
1+BO(p)
et que l’on nomme formule de BlackDans le cas particulier ou le schéma bloc est à retour unitaire (figure 1.24), alors
la formule de Black devient.
BF(p) = S(p)
E(p)= BO(p)
1+BO(p)

32 1 Caractérisation et étude des systèmes asservis
−+ H1E(p)
H2ε(p)
H3S(p)
FIGURE 1.24 – Structure d’un système linéaire à retour unitaire
1.6.4 Exemple guide : détermination d’une fonction de transfert
Il y a deux méthodes principales pour déterminer la fonction de transfert d’unsystème, la prémière méthode s’appuie sur la modification du schéma-bloc pourse ramener à une forme simple permettant d’appliquer la formule de Black, l’autreméthode est purement analytique. Souvent nous utiliserons une combinaison desdeux.
a ) Détermination par la modification du schéma bloc
On reprend l’exemple de la figure 1.21.
Étape 1 : On commence par simplifier tous les blocs en série (figure 1.25).
−+E1
F ·G ·Hε(p) −+u
L MS1
P
Q ·R
n1
n2
FIGURE 1.25 – Détermination fonction de transfert - étape 1
Étape 2 : Ensuite, il faut déplacer les jonctions ou les sommateurs qui sont entre-lacés (sur la figure 1.26, on a choisit de déplacer la jonction vers l’aval).
−+E1
F ·G ·Hε(p) −+u
L MS1
P
1
MQ ·R
n1
n2
FIGURE 1.26 – Détermination fonction de transfert - étape 2
1.6 Représentation des systèmes asservis et linéaires par le schéma fonctionnel 33
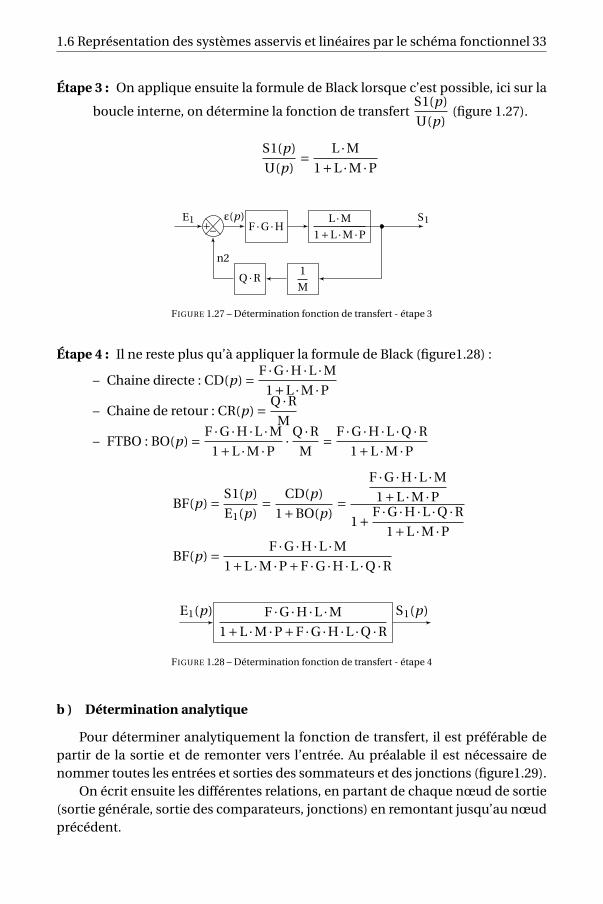
Étape 3 : On applique ensuite la formule de Black lorsque c’est possible, ici sur la
boucle interne, on détermine la fonction de transfertS1(p)
U(p)(figure 1.27).
S1(p)
U(p)= L ·M
1+L ·M ·P
−+E1
F ·G ·Hε(p) L ·M
1+L ·M ·P
S1
1
MQ ·R
n2
FIGURE 1.27 – Détermination fonction de transfert - étape 3
Étape 4 : Il ne reste plus qu’à appliquer la formule de Black (figure1.28) :
– Chaine directe : CD(p) = F ·G ·H ·L ·M
1+L ·M ·P
– Chaine de retour : CR(p) = Q ·R
M
– FTBO : BO(p) = F ·G ·H ·L ·M
1+L ·M ·P· Q ·R
M= F ·G ·H ·L ·Q ·R
1+L ·M ·P
BF(p) = S1(p)
E1(p)= CD(p)
1+BO(p)=
F ·G ·H ·L ·M
1+L ·M ·P
1+ F ·G ·H ·L ·Q ·R
1+L ·M ·P
BF(p) = F ·G ·H ·L ·M
1+L ·M ·P+F ·G ·H ·L ·Q ·R
F ·G ·H ·L ·M
1+L ·M ·P+F ·G ·H ·L ·Q ·R
E1(p) S1(p)
FIGURE 1.28 – Détermination fonction de transfert - étape 4
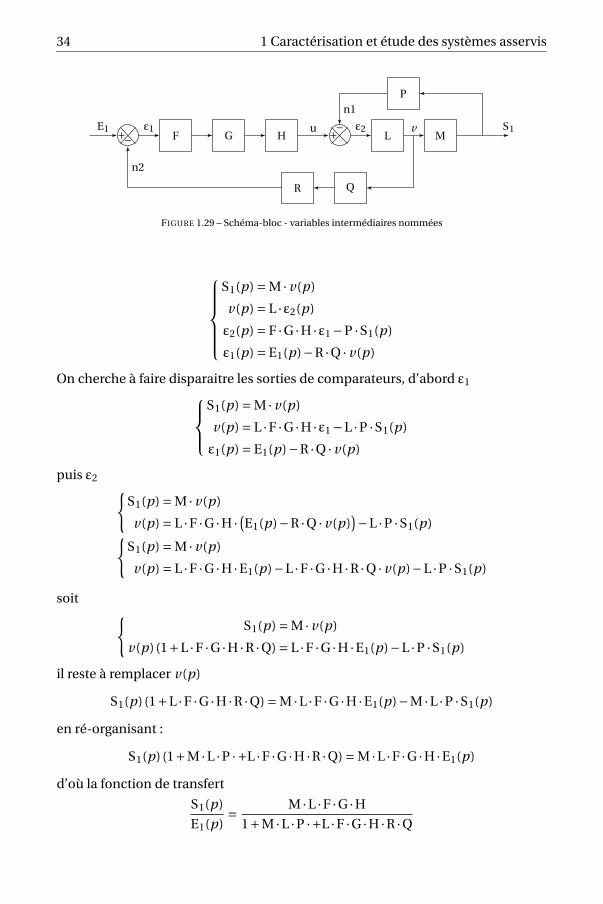
b ) Détermination analytique
Pour déterminer analytiquement la fonction de transfert, il est préférable departir de la sortie et de remonter vers l’entrée. Au préalable il est nécessaire denommer toutes les entrées et sorties des sommateurs et des jonctions (figure1.29).
On écrit ensuite les différentes relations, en partant de chaque nœud de sortie(sortie générale, sortie des comparateurs, jonctions) en remontant jusqu’au nœudprécédent.
34 1 Caractérisation et étude des systèmes asservis
−+ FE1
Gε1
H−+u
Lε2
Mv S1
P
QR
n1
n2
FIGURE 1.29 – Schéma-bloc - variables intermédiaires nommées
S1(p) = M · v(p)
v(p) = L ·ε2(p)
ε2(p) = F ·G ·H ·ε1 −P ·S1(p)
ε1(p) = E1(p)−R ·Q · v(p)
On cherche à faire disparaitre les sorties de comparateurs, d’abord ε1S1(p) = M · v(p)
v(p) = L ·F ·G ·H ·ε1 −L ·P ·S1(p)
ε1(p) = E1(p)−R ·Q · v(p)
puis ε2 S1(p) = M · v(p)
v(p) = L ·F ·G ·H · (E1(p)−R ·Q · v(p))−L ·P ·S1(p)
S1(p) = M · v(p)
v(p) = L ·F ·G ·H ·E1(p)−L ·F ·G ·H ·R ·Q · v(p)−L ·P ·S1(p)
soit S1(p) = M · v(p)
v(p) (1+L ·F ·G ·H ·R ·Q) = L ·F ·G ·H ·E1(p)−L ·P ·S1(p)
il reste à remplacer v(p)
S1(p) (1+L ·F ·G ·H ·R ·Q) = M ·L ·F ·G ·H ·E1(p)−M ·L ·P ·S1(p)
en ré-organisant :
S1(p) (1+M ·L ·P ·+L ·F ·G ·H ·R ·Q) = M ·L ·F ·G ·H ·E1(p)
d’où la fonction de transfert
S1(p)
E1(p)= M ·L ·F ·G ·H
1+M ·L ·P ·+L ·F ·G ·H ·R ·Q
1.6 Représentation des systèmes asservis et linéaires par le schéma fonctionnel 35
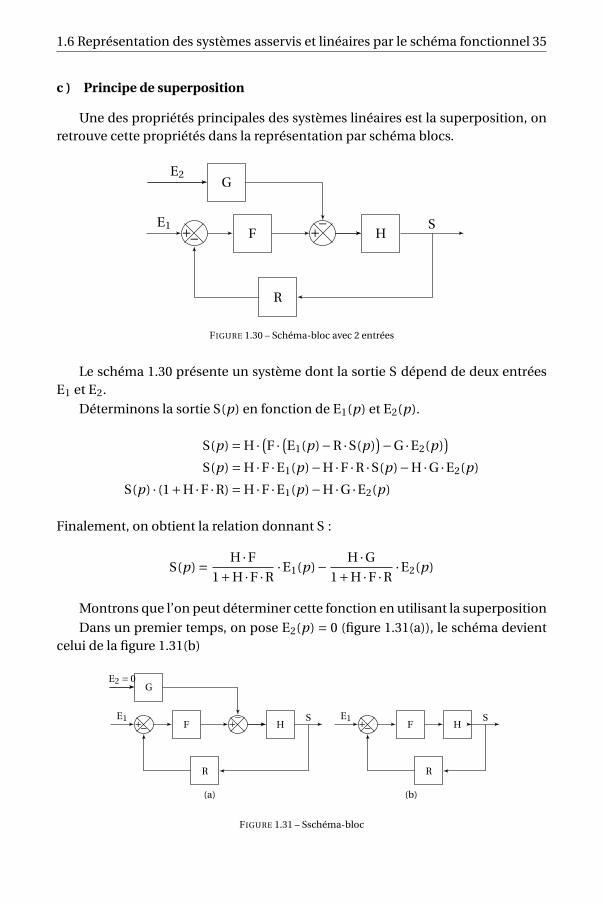
c ) Principe de superposition
Une des propriétés principales des systèmes linéaires est la superposition, onretrouve cette propriétés dans la représentation par schéma blocs.
−+E1
F−+ H
S
R
GE2
FIGURE 1.30 – Schéma-bloc avec 2 entrées
Le schéma 1.30 présente un système dont la sortie S dépend de deux entréesE1 et E2.
Déterminons la sortie S(p) en fonction de E1(p) et E2(p).
S(p) = H · (F · (E1(p)−R ·S(p))−G ·E2(p)
)S(p) = H ·F ·E1(p)−H ·F ·R ·S(p)−H ·G ·E2(p)
S(p) · (1+H ·F ·R) = H ·F ·E1(p)−H ·G ·E2(p)
Finalement, on obtient la relation donnant S :
S(p) = H ·F
1+H ·F ·R·E1(p)− H ·G
1+H ·F ·R·E2(p)
Montrons que l’on peut déterminer cette fonction en utilisant la superposition
Dans un premier temps, on pose E2(p) = 0 (figure 1.31(a)), le schéma devientcelui de la figure 1.31(b)
−+E1
F−+ H
S
R
GE2 = 0
(a)
−+E1
F HS
R
(b)
FIGURE 1.31 – Sschéma-bloc
36 1 Caractérisation et étude des systèmes asservis
On détermine rapidement la fonction de transfert vis à vis de l’entrée E1(p)pour E2(p) = 0.
S(p)E2(p)=0 = H ·F
1+H ·F ·R·E1(p)
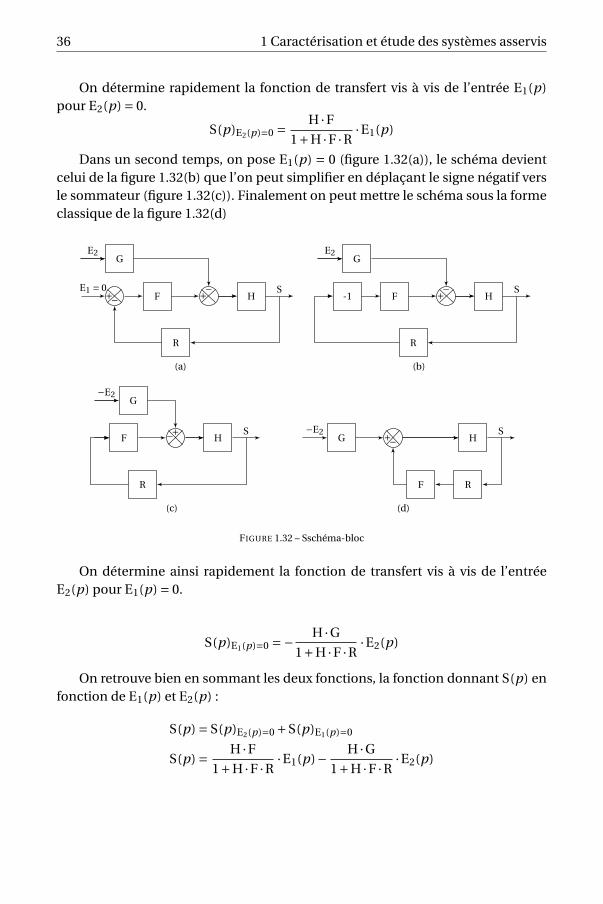
Dans un second temps, on pose E1(p) = 0 (figure 1.32(a)), le schéma devientcelui de la figure 1.32(b) que l’on peut simplifier en déplaçant le signe négatif versle sommateur (figure 1.32(c)). Finalement on peut mettre le schéma sous la formeclassique de la figure 1.32(d)
−+E1 = 0
F−+ H
S
R
GE2
(a)
-1 F−+ H
S
R
GE2
(b)
F+− H
S
R
G−E2
(c)
G−E2
−+ HS
RF
(d)
FIGURE 1.32 – Sschéma-bloc
On détermine ainsi rapidement la fonction de transfert vis à vis de l’entréeE2(p) pour E1(p) = 0.
S(p)E1(p)=0 =− H ·G
1+H ·F ·R·E2(p)
On retrouve bien en sommant les deux fonctions, la fonction donnant S(p) enfonction de E1(p) et E2(p) :
S(p) = S(p)E2(p)=0 +S(p)E1(p)=0
S(p) = H ·F
1+H ·F ·R·E1(p)− H ·G
1+H ·F ·R·E2(p)

1.6 Représentation des systèmes asservis et linéaires par le schéma fonctionnel 37
1.6.5 Application guide : Moteur à courant continu à champ permanent
a ) Principe de fonctionnement
Un moteur 4 à courant continu est constitué d’un rotor bobiné (induit) qui estplacé dans le champ magnétique créé par un stator (inducteur), le champ peutêtre créé par un aimant permanent ou par un stator bobiné.
rotor - induit
stator - inducteur
collecteur
FIGURE 1.33 – Moteur à courant continu - écorché
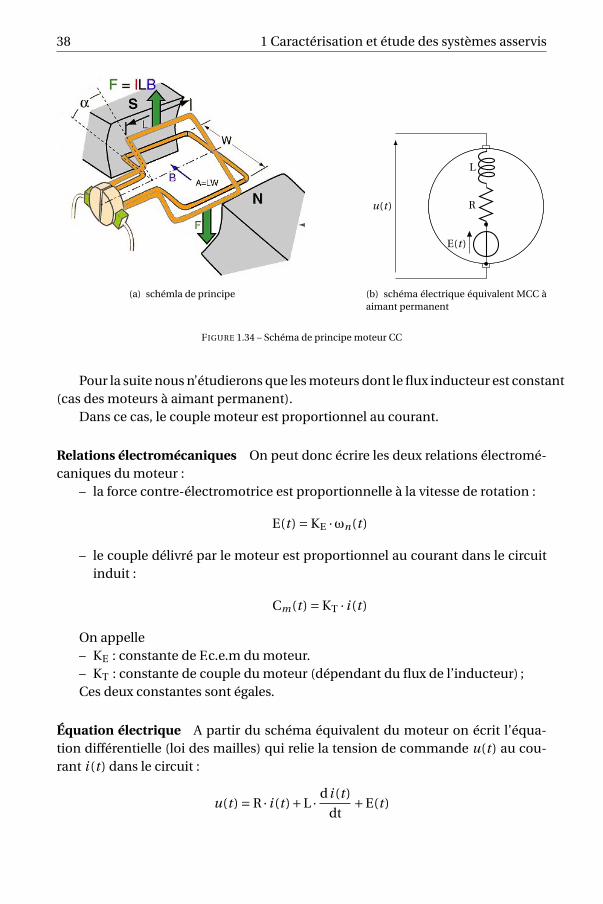
Le courant qui circule dans un conducteur du rotor placé dans le champ ma-gnétique produit une force qui à tendance à faire tourner le rotor (figure 1.34). Laforce agissant sur le conducteur est proportionnelle au courant circulant dans leconducteur.
Lorsque le rotor tourne une force électromotrice est induite dans le rotor quis’oppose à la tension d’alimentation, cette tension, appelée force contre électro-motrice f.c.e.m, est proportionnelle à la vitesse de rotation de l’arbre moteur.
b ) Modèle de connaissance
D’un point de vue électrique le moteur peut donc être modélisé de la façonsuivante (schéma 1.34(b)). le rotor est équivalent à une résistance, une inductanceet un générateur en série le stator est une inductance. On note :
– U(t ) : tension de commande d’in-duit,
– I(t ) : courant d’induit,
– E : force contre électromotrice,– L, R : inductance et résistance
d’induit ;
4. Le principe et l’étude des machines électriques sera approfondi en sciences physiques
38 1 Caractérisation et étude des systèmes asservis
(a) schémla de principe
E(t )
R
L
u(t )
(b) schéma électrique équivalent MCC àaimant permanent
FIGURE 1.34 – Schéma de principe moteur CC
Pour la suite nous n’étudierons que les moteurs dont le flux inducteur est constant(cas des moteurs à aimant permanent).
Dans ce cas, le couple moteur est proportionnel au courant.
Relations électromécaniques On peut donc écrire les deux relations électromé-caniques du moteur :
– la force contre-électromotrice est proportionnelle à la vitesse de rotation :
E(t ) = KE ·ωn(t )
– le couple délivré par le moteur est proportionnel au courant dans le circuitinduit :
Cm(t ) = KT · i (t )
On appelle– KE : constante de F.c.e.m du moteur.– KT : constante de couple du moteur (dépendant du flux de l’inducteur) ;Ces deux constantes sont égales.
Équation électrique A partir du schéma équivalent du moteur on écrit l’équa-tion différentielle (loi des mailles) qui relie la tension de commande u(t ) au cou-rant i (t ) dans le circuit :
u(t ) = R · i (t )+L · d i (t )
dt+E(t )

1.6 Représentation des systèmes asservis et linéaires par le schéma fonctionnel 39
FIGURE 1.35 – Modélisation mécanique
Comportement mécanique Le couple moteur cm(t ) entraine le rotor en rotationet l’arbre moteur.
Le rotor a une inertie Ir [kgm2]. La charge est caractérisée par son inertie Ic
ramené sur l’arbre moteur. Un couple résistant cr (t ) s’oppose au mouvement.L’arbre moteur est en liaison pivot avec le bâti, les frottements dans la liaison
sont modélisés par un couple de frottement fluide proportionnel à la vitesse derotation : c f (t ) =− f ·ωm(t ).
L’application du théorème du moment cinétique appliqué à l’arbre moteur età la charge donne :
(Ic + Ir ) · dωm(t )
dt= cm(t )− f ·ωm(t )− cr (t )
On pose Ie = Ic + Ir , avec Ie l’inertie équivalente à l’ensemble mobile ramené surl’arbre moteur.
Ie · dωm(t )
dt= cm(t )− f ·ωm(t )− cr (t )
Le fonctionnement du moteur est donc traduit par ces quatre équations.
c ) Schéma-bloc du moteur
On pose : L (ωm(t )) =Ωm(p), L (cm(t )) = Cm(p), L (cr (t )) = Cr (p), L (u(t )) =U(p), L (E(t )) = E(p) et L (i (t )) = I(p).
On se place dans les conditions de Heaviside. Dans le domaine symbolique,les quatre équations deviennent :
cm(t ) = KT · i (t ) → Cm(p) = KT · I(p)
E(t ) = KE ·ωn(t ) → E(p) = KE ·Ωm(p)
u(t ) = R · i (t )+L · d i (t )
dt+E(t ) → U(p) = (
R+L ·p) · I(p)+E(p)
Ie · dωm(t )
dt= cm(t )− f ·ωm(t )− cr (t ) → Ie ·p ·Ωm(p) = Cm(p)− f ·Ωm(p)−Cr (p)
Pour chaque équation on peut tracer un schéma- bloc élémentaire :
40 1 Caractérisation et étude des systèmes asservis
Cm(p) = KT · I(p) KTCm(p) I(p)
E(p) = KE ·Ωm(p) KEΩm(p) E(p)
U(p) = (R+L ·p
) · I(p)+E(p)que l’on met sous la forme
I(p) = 1
R+L ·p· (U(p)−E(p)
) −+U(p) 1
R+L ·pE(p
I(p)
U(p) = Ie · p ·Ωm(p) = Cm(p) − f ·Ωm(p)−Cr (p)que l’on met sous la forme
Ωm(p) = 1
f + Ie ·p· (Cm(p)−Cr (p)
)−+
Cm(p) 1
f + Ie ·p
Cr (p)Ωm(p)
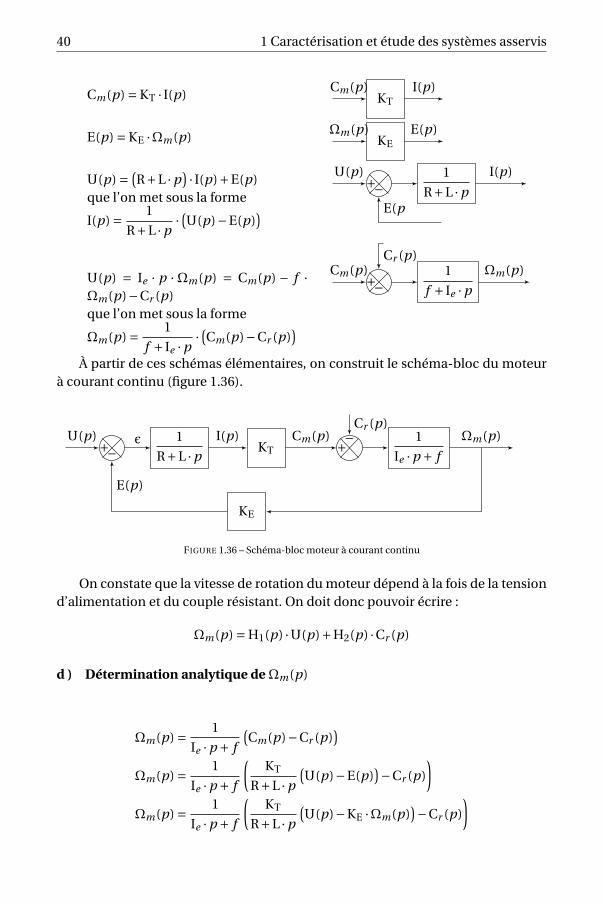
À partir de ces schémas élémentaires, on construit le schéma-bloc du moteurà courant continu (figure 1.36).
−+U(p) 1
R+L ·pε
KTI(p) −+Cm(p) 1
Ie ·p + f
Ωm(p)
KE
E(p)
Cr (p)
FIGURE 1.36 – Schéma-bloc moteur à courant continu
On constate que la vitesse de rotation du moteur dépend à la fois de la tensiond’alimentation et du couple résistant. On doit donc pouvoir écrire :
Ωm(p) = H1(p) ·U(p)+H2(p) ·Cr (p)
d ) Détermination analytique deΩm(p)
Ωm(p) = 1
Ie ·p + f
(Cm(p)−Cr (p)
)Ωm(p) = 1
Ie ·p + f
(KT
R+L ·p
(U(p)−E(p)
)−Cr (p)
)Ωm(p) = 1
Ie ·p + f
(KT
R+L ·p
(U(p)−KE ·Ωm(p)
)−Cr (p)
)

1.6 Représentation des systèmes asservis et linéaires par le schéma fonctionnel 41
soit en réorganisant
Ωm(p) = KT
(Ie ·p + f ) · (R+L ·p)·U(p)− KE ·KT
(Ie ·p + f ) · (R+L ·p)·Ωm(p)− KT
Ie ·p + f·Cr (p)
Ωm(p)
(1+ KE ·KT
(Ie ·p + f ) · (R+L ·p)
)= KT
(Ie ·p + f ) · (R+L ·p)·U(p)− 1
Ie ·p + f·Cr (p)
Ωm(p)
((Ie ·p + f ) · (R+L ·p)+KE ·KT
(Ie ·p + f ) · (R+L ·p)
)= KT
(Ie ·p + f ) · (R+L ·p)·U(p)− 1
Ie ·p + f·Cr (p)
Ωm(p) = KT
(Ie ·p + f ) · (R+L ·p)+KE ·KT·U(p)− R+L ·p
(Ie ·p + f ) · (R+L ·p)+KE ·KT·Cr (p)
On retrouve bien que Ωm(p) dépend bien de U(p) et Cr (p).Cet exemple est important, le moteur à courant continu étant un des princi-
paux actionneurs utilisés dans les asservissements.
42 1 Caractérisation et étude des systèmes asservis
1.6.6 Exercices
Exercice 4- Fonction de transfert d’un moteur CC Corrigé page ??
On reprend l’énoncé de l’exemple de la page 37.Q1. Retrouvez Ωm(p) en utilisation le principe de superposition
Exercice 5- Étude d’un système linéaire Corrigé page ??
Un système linéaire est décrit par les équations différentielles ci dessous :
d 2s(t )
d t 2 +110 · d s(t )
d t+1000 · s(t ) = d v(t )
d t++30 · v(t )
d v(t )
d t+ v(t ) = k ·e(t )
L’entrée du système est e(t ), la sortie s(t ) et avec v(t ) , une variable interne.Q1. Écrire les équations dans le domaine symbolique.Q2. Déterminer la fonction de transfert du système, pour cela
Q2a. Déterminer la fonction de transfert T(p) = V(p)
E(p)
Q2b. Déterminer la fonction de transfert R(p) = S(p)
V(p)Q3. On sollicite le système avec un échelon unitaire
Q3a. Déterminer la valeur finale de la sortie et la tangente à l’origine.Q3b. Déterminer la sortie s(t ).
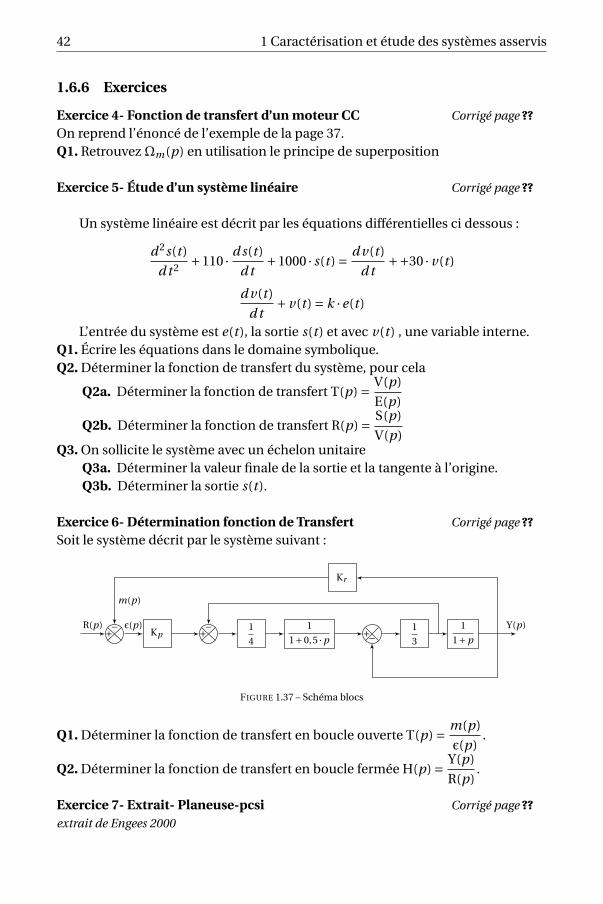
Exercice 6- Détermination fonction de Transfert Corrigé page ??
Soit le système décrit par le système suivant :
−+R(p)Kp
ε(p) −+ 1
4
1
1+0,5 ·p −+1
3
1
1+p
Y(p)
Kr
m(p)
FIGURE 1.37 – Schéma blocs
Q1. Déterminer la fonction de transfert en boucle ouverte T(p) = m(p)
ε(p).
Q2. Déterminer la fonction de transfert en boucle fermée H(p) = Y(p)
R(p).
Exercice 7- Extrait- Planeuse-pcsiextrait de Engees 2000
Corrigé page ??
1.6 Représentation des systèmes asservis et linéaires par le schéma fonctionnel 43
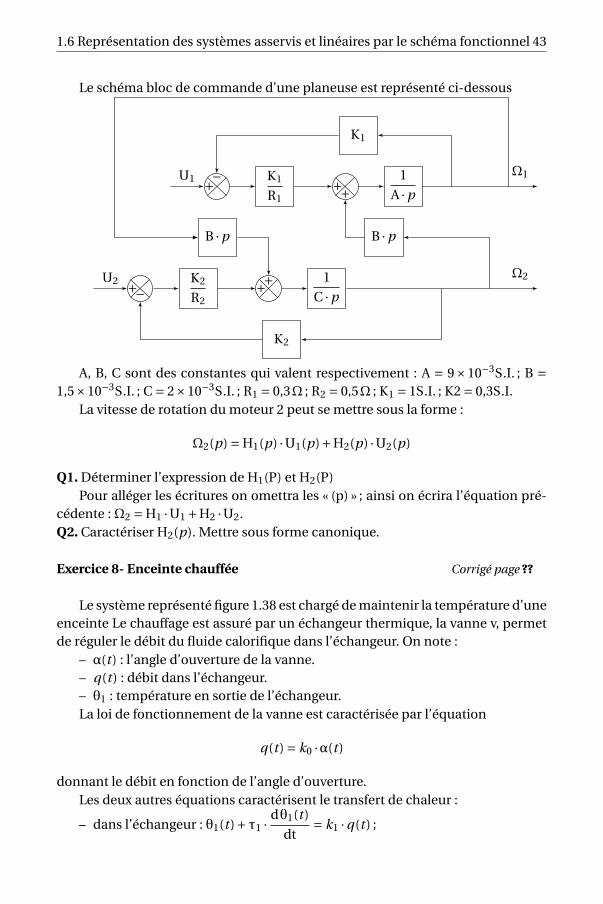
Le schéma bloc de commande d’une planeuse est représenté ci-dessous
−+U2 K2
R2
++ 1
C ·p
Ω2
K2
−+U1 K1
R1 ++1
A ·p
Ω1
K1
B ·p B ·p
A, B, C sont des constantes qui valent respectivement : A = 9×10−3S.I. ; B =1,5×10−3S.I. ; C = 2×10−3S.I. ; R1 = 0,3Ω ; R2 = 0,5Ω ; K1 = 1S.I. ; K2 = 0,3S.I.
La vitesse de rotation du moteur 2 peut se mettre sous la forme :
Ω2(p) = H1(p) ·U1(p)+H2(p) ·U2(p)
Q1. Déterminer l’expression de H1(P) et H2(P)Pour alléger les écritures on omettra les « (p) » ; ainsi on écrira l’équation pré-
cédente : Ω2 = H1 ·U1 +H2 ·U2.Q2. Caractériser H2(p). Mettre sous forme canonique.
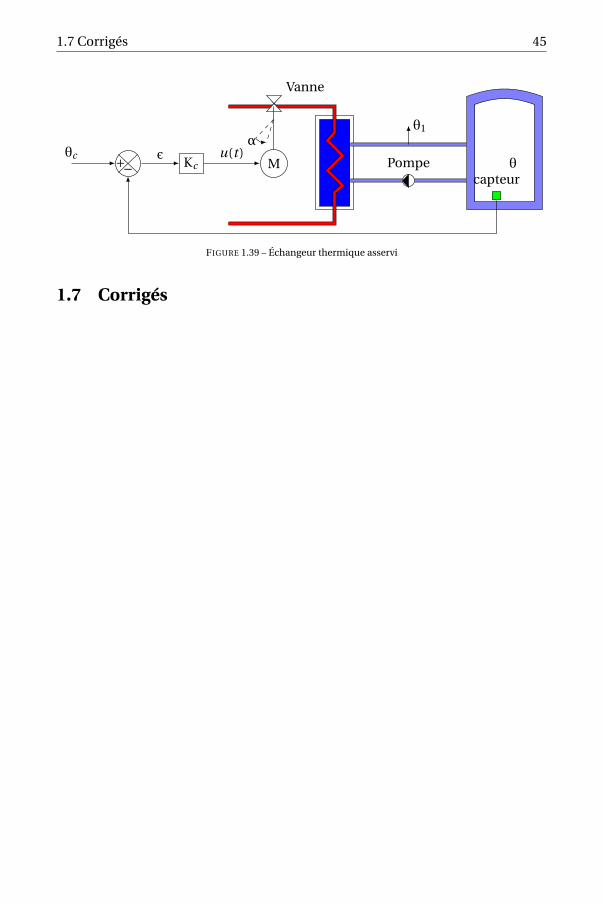
Exercice 8- Enceinte chauffée Corrigé page ??
Le système représenté figure 1.38 est chargé de maintenir la température d’uneenceinte Le chauffage est assuré par un échangeur thermique, la vanne v, permetde réguler le débit du fluide calorifique dans l’échangeur. On note :
– α(t ) : l’angle d’ouverture de la vanne.– q(t ) : débit dans l’échangeur.– θ1 : température en sortie de l’échangeur.La loi de fonctionnement de la vanne est caractérisée par l’équation
q(t ) = k0 ·α(t )
donnant le débit en fonction de l’angle d’ouverture.Les deux autres équations caractérisent le transfert de chaleur :
– dans l’échangeur : θ1(t )+τ1 · dθ1(t )
dt= k1 ·q(t ) ;

44 1 Caractérisation et étude des systèmes asservis
θθ
θ1
Pompe
xVanne
α
FIGURE 1.38 – Échangeur thermique
– et dans l’enceinte : θ(t )+τ2 · dθ(t )
dt= k2 ·θ1(t ).
On suppose que toutes les conditions initiales sont nulles.L’entrée du système est l’angle d’ouverture de la vanne α(t ) et la température
de l’enceinte θ, la sortie.A(p) la transformée de Laplace de α(t ) et Q(t p), Θ(p) et Θ1(p) respectivement
les transformées de q(t ), θ(t ) et θ1(t ).Q1. Traduire dans le domaine de Laplace les équations de fonctionnement. en dé-
duire les fonctions de transfert :Q(t p)
A(p),Θ1(p)
Q(pet
Θ(p)
Θ1(p).
Q2. Compléter le schéma bloc du système.A(p) Q(p) Θ1(p) Θ(p)
Q3. Déterminer la fonction de transfert HO(p) = Θ(p)
A(p)Afin de réguler la température, On choisit de motoriser la vanne et on installe
un capteur dans l’enceinte qui permet de mesurer la température θ(t ). Cette tem-pérature est comparée à la température de consigne θc (t ). Un amplificateur Kc
génère la tension de commande u(t ) du moteur (M) qui ouvre ou ferme la vanneen fonction de l’écart de température.
Le schéma figure 1.39 précise la structure de l’asservissement.
La fonction de transfert du moteur est : M(p) = A(p)
U(p)= Km
p · (1+Tm ·p)Q4. Compléter le schéma bloc du système, l’entrée est Θc (p).
Q5. Déterminer la fonction de transfert du système HF(p) = Θ(p)
Θc (p).
Pour la suite on suppose que kc est tel que le système est stable.Q6. Déterminer la valeur finale pour une entrée en échelon θ(t ) = θ0 ·u(t )
1.7 Corrigés 45
θθ
θ1
Pompe
xVanne
MKc−+ε u(t )
α
capteur
θc
FIGURE 1.39 – Échangeur thermique asservi
1.7 Corrigés