SCOUT - Projet d'exemple SIMOTION D435-2 5 6 7 8 …€¦ · 1.2 Consignes de sécurité...
138
SIMOTION SIMOTION SCOUT Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2 Mise en route Valable à partir de V4.4 04/2014 Avant-propos Consignes de sécurité 1 Mise en route avec SIMOTION SCOUT 2 Préparer la configuration 3 Créer un projet 4 Créer un appareil SIMOTION et configurer la communication en ligne 5 Charger le projet dans le système cible 6 Configurer l'entraînement 7 Configurer l'alimentation 8 Configurer un axe 9 Tester l'axe à l'aide du tableau de commande axe 10 Configurer les sorties TOR 11 Programmer une application SIMOTION 12 Configurer le système exécutif 13 Démarrer et arrêter le système 14 Visualiser l'application 15 Directives CSDE A
Transcript of SCOUT - Projet d'exemple SIMOTION D435-2 5 6 7 8 …€¦ · 1.2 Consignes de sécurité...
SIMOTION
SIMOTION SCOUTMise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route
Valable à partir de V4.4
04/2014
Avant-propos
Consignes de sécurité 1
Mise en route avec SIMOTION SCOUT
2
Préparer la configuration 3
Créer un projet 4
Créer un appareil SIMOTION et configurer la communication en ligne
5
Charger le projet dans le système cible
6
Configurer l'entraînement 7
Configurer l'alimentation 8
Configurer un axe 9
Tester l'axe à l'aide du tableau de commande axe
10
Configurer les sorties TOR 11
Programmer une application SIMOTION
12
Configurer le système exécutif
13
Démarrer et arrêter le système
14
Visualiser l'application 15
Directives CSDE A

Mentions légalesSignalétique d'avertissement
Ce manuel donne des consignes que vous devez respecter pour votre propre sécurité et pour éviter des dommages matériels. Les avertissements servant à votre sécurité personnelle sont accompagnés d'un triangle de danger, les avertissements concernant uniquement des dommages matériels sont dépourvus de ce triangle. Les avertissements sont représentés ci-après par ordre décroissant de niveau de risque.
DANGER
signifie que la non-application des mesures de sécurité appropriées entraîne la mort ou des blessures graves.
ATTENTION
signifie que la non-application des mesures de sécurité appropriées peut entraîner la mort ou des blessures graves.
PRUDENCE
signifie que la non-application des mesures de sécurité appropriées peut entraîner des blessures légères.
IMPORTANTsignifie que la non-application des mesures de sécurité appropriées peut entraîner un dommage matériel.En présence de plusieurs niveaux de risque, c'est toujours l'avertissement correspondant au niveau le plus élevé qui est reproduit. Si un avertissement avec triangle de danger prévient des risques de dommages corporels, le même avertissement peut aussi contenir un avis de mise en garde contre des dommages matériels.
Personnes qualifiéesL’appareil/le système décrit dans cette documentation ne doit être manipulé que par du personnel qualifié pour chaque tâche spécifique. La documentation relative à cette tâche doit être observée, en particulier les consignes de sécurité et avertissements. Les personnes qualifiées sont, en raison de leur formation et de leur expérience, en mesure de reconnaître les risques liés au maniement de ce produit / système et de les éviter.
Utilisation des produits Siemens conforme à leur destinationTenez compte des points suivants:
ATTENTION
Les produits Siemens ne doivent être utilisés que pour les cas d'application prévus dans le catalogue et dans la documentation technique correspondante. S'ils sont utilisés en liaison avec des produits et composants d'autres marques, ceux-ci doivent être recommandés ou agréés par Siemens. Le fonctionnement correct et sûr des produits suppose un transport, un entreposage, une mise en place, un montage, une mise en service, une utilisation et une maintenance dans les règles de l'art. Il faut respecter les conditions d'environnement admissibles ainsi que les indications dans les documentations afférentes.
Marques de fabriqueToutes les désignations repérées par ® sont des marques déposées de Siemens AG. Les autres désignations dans ce document peuvent être des marques dont l'utilisation par des tiers à leurs propres fins peut enfreindre les droits de leurs propriétaires respectifs.
Exclusion de responsabilitéNous avons vérifié la conformité du contenu du présent document avec le matériel et le logiciel qui y sont décrits. Ne pouvant toutefois exclure toute divergence, nous ne pouvons pas nous porter garants de la conformité intégrale. Si l'usage de ce manuel devait révéler des erreurs, nous en tiendrons compte et apporterons les corrections nécessaires dès la prochaine édition.
Siemens AGIndustry SectorPostfach 48 4890026 NÜRNBERGALLEMAGNE
Copyright © Siemens AG 2010 - 2014.Tous droits réservés
Avant-propos
Domaine de validité et normesLe document présent fait partie du paquet de documentation Utilisation du système d'ingénierie.
Domaine de validitéCe manuel est valable pour SIMOTION SCOUT, version V4.4.
Documentation SIMOTIONVous trouverez une vue d'ensemble de la documentation SIMOTION dans le document Vue d'ensemble de la documentation SIMOTION.
Cette documentation est fournie avec SIMOTION SCOUT en tant que document électronique et comporte 10 paquets de documentation.
Pour la version de produit SIMOTION V4.4, les documentations suivantes sont disponibles :
● Manuel du système d'ingénierie SIMOTION
● SIMOTION Description du système et des fonctions
● SIMOTION Service et Diagnostic
● SIMOTION IT
● SIMOTION Programmation
● SIMOTION Programmation - Références
● SIMOTION C
● SIMOTION P
● SIMOTION D
● SIMOTION Documentation complémentaire
Assistance téléphonique et adresses Internet
Informations supplémentairesSous le lien ci-dessous, vous trouverez des informations sur les sujets suivants :
● Commande de documentation, liste des publications
● Liens supplémentaires pour le téléchargement de documents
● Utilisation de documentation en ligne (trouver des manuels/informations et y effectuer des recherches)
http://www.siemens.com/motioncontrol/docu
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 3
Pour toute autre demande (suggestion, correction) concernant la documentation technique, envoyez un message électronique à l'adresse suivante :[email protected]
My Documentation ManagerSous le lien suivant, vous trouverez des informations vous permettant de composer une documentation personnalisée sur la base des contenus proposés par Siemens et de l'adapter à votre machine :
http://www.siemens.com/mdm
FormationSous le lien suivant, vous trouverez des informations sur SITRAIN, la formation de Siemens pour les produits, les systèmes et les solutions d'automatisation :
http://www.siemens.com/sitrain
FAQVous trouverez la foire aux questions dans les utilitaires et applications SIMOTION contenues dans la livraison de SIMOTION SCOUT, ainsi que sur les pages Service&Support, sous Support produit :
http://support.automation.siemens.com
Support techniquePour tout conseil technique, vous trouverez les coordonnées téléphoniques spécifiques à chaque pays sur Internet, sous Contact :
http://www.siemens.com/automation/service&support
Avant-propos
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-24 Mise en route, 04/2014
Sommaire
Avant-propos................................................................................................................................................3
1 Consignes de sécurité..................................................................................................................................9 1.1 Consignes de sécurité élémentaires.............................................................................................9 1.1.1 Consignes de sécurité générales..................................................................................................9 1.1.2 Consignes de sécurité relatives aux champs électromagnétiques (CEM)..................................13 1.1.3 Manipulation des composants sensibles aux décharges électrostatiques (ESD).......................13 1.1.4 Industrial Security........................................................................................................................14 1.1.5 Risques résiduels des systèmes d'entraînement (Power Drive Systems)..................................15 1.2 Consignes de sécurité spécifiques..............................................................................................17
2 Mise en route avec SIMOTION SCOUT.....................................................................................................19 2.1 But de la mise en route...............................................................................................................19 2.2 Projet d'exemple..........................................................................................................................19 2.3 Prérequis.....................................................................................................................................21 2.4 Informations générales................................................................................................................22 2.4.1 Aide en ligne de SIMOTION SCOUT..........................................................................................22 2.4.2 Documentation disponible...........................................................................................................23 2.4.3 Générateur de projet...................................................................................................................23 2.4.4 Utilitaires et applications..............................................................................................................24
3 Préparer la configuration............................................................................................................................25 3.1 Rétablir les réglages usine..........................................................................................................25 3.2 Configurer l'interface pour la communication en ligne................................................................26 3.2.1 Préparer l'interface Ethernet de la PG/du PC.............................................................................27 3.2.2 Définir le point d'accès de l'appareil SIMOTION.........................................................................28 3.3 Résultat dans le projet d'exemple...............................................................................................29
4 Créer un projet............................................................................................................................................31 4.1 Vue d'ensemble...........................................................................................................................31 4.2 Projet...........................................................................................................................................31 4.3 Créer un nouveau projet..............................................................................................................31 4.4 Résultat dans le projet d'exemple...............................................................................................32
5 Créer un appareil SIMOTION et configurer la communication en ligne.....................................................33 5.1 Vue d'ensemble...........................................................................................................................33 5.2 Plate-forme SIMOTION D...........................................................................................................33 5.3 Créer un appareil SIMOTION......................................................................................................34 5.3.1 Etapes.........................................................................................................................................34 5.3.2 Créer un appareil SIMOTION......................................................................................................35 5.3.3 Configuration de l'interface PROFINET......................................................................................36
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 5
5.3.4 Configurer la communication de la PG/du PC.............................................................................37 5.4 Résultat dans le projet d'exemple...............................................................................................38
6 Charger le projet dans le système cible.....................................................................................................39 6.1 Vue d'ensemble...........................................................................................................................39 6.2 Enregistrer et compiler le projet..................................................................................................39 6.3 Connecter aux appareils cibles sélectionnés – Passer en ligne..................................................40 6.4 Charger le projet dans le système cible......................................................................................43
7 Configurer l'entraînement...........................................................................................................................47 7.1 Vue d'ensemble...........................................................................................................................47 7.2 Entraînement...............................................................................................................................47 7.3 Configuration automatique de l'entraînement.............................................................................47 7.4 Faire configurer l'entraînement automatiquement.......................................................................48 7.5 Résultat dans le projet d'exemple...............................................................................................51
8 Configurer l'alimentation.............................................................................................................................53 8.1 Vue d'ensemble...........................................................................................................................53 8.2 Configurer une alimentation sans interface DRIVE‑CLiQ...........................................................53
9 Configurer un axe.......................................................................................................................................57 9.1 Vue d'ensemble...........................................................................................................................57 9.2 Objet technologique Axe.............................................................................................................57 9.3 Assistant axe...............................................................................................................................57 9.4 Créer un axe................................................................................................................................58 9.5 Charger la configuration de l'axe dans le système cible.............................................................63
10 Tester l'axe à l'aide du tableau de commande axe....................................................................................65 10.1 Vue d'ensemble...........................................................................................................................65 10.2 Tableau de commande axe.........................................................................................................65 10.3 Utilisation du tableau de commande axe....................................................................................65 10.4 Résultat dans le projet d'exemple...............................................................................................69
11 Configurer les sorties TOR.........................................................................................................................71
12 Programmer une application SIMOTION....................................................................................................73 12.1 Vue d'ensemble...........................................................................................................................73 12.2 Variables.....................................................................................................................................74 12.2.1 Types de variable........................................................................................................................74 12.2.2 Variables du projet d'exemple.....................................................................................................74 12.2.3 Créer les variables globales à l'appareil......................................................................................75 12.2.4 Créer les variables E/S................................................................................................................76 12.2.5 Sauvegarder la configuration......................................................................................................80 12.3 Programmer................................................................................................................................80
Sommaire
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-26 Mise en route, 04/2014
12.3.1 Langages de programmation dans le projet d'exemple..............................................................80 12.3.2 MCC Motion Control Chart..........................................................................................................80 12.3.2.1 Le langage de programmation MCC...........................................................................................80 12.3.2.2 Créer une source MCC...............................................................................................................81 12.3.2.3 Créer un diagramme MCC..........................................................................................................82 12.3.2.4 Insérer des blocs de commande dans un diagramme MCC.......................................................82 12.4 Créer un programme d'exemple MCC : structure de base..........................................................85 12.4.1 Vue d'ensemble...........................................................................................................................85 12.4.2 Exécution du programme............................................................................................................85 12.4.3 Affectation de variable g_bo_ready:=false..................................................................................86 12.4.4 Affectation de variable g_bo_start:=true......................................................................................88 12.4.5 Activer le déblocage des axes.....................................................................................................90 12.4.6 Référencer l'axe..........................................................................................................................92 12.4.7 Positionner l'axe sur la position de destination...........................................................................93 12.4.8 Positionner l'axe sur la position initiale........................................................................................95 12.4.9 Supprimer le déblocage des axes...............................................................................................97 12.4.10 Affectation de variable g_bo_start:=false....................................................................................98 12.4.11 Affectation de variable g_bo_ready:=true....................................................................................98 12.5 Etendre le programme d'exemple MCC : commande de l'alimentation......................................98 12.5.1 Exécution du programme............................................................................................................98 12.5.2 Appel de fonction système _LineModule_control[FB]................................................................100 12.5.3 Affectation de variable LineModule_STW:=myFB_LineControl.periOut....................................103 12.5.4 Créer une boucle UNTIL...........................................................................................................104 12.5.5 Copier des blocs........................................................................................................................105 12.5.6 Modifier l'appel de fonction système _linemodule_control........................................................106 12.6 Créer des programmes MCC supplémentaires pour le projet d'exemple.................................106 12.7 Sauvegarder les programmes d'exemple MCC........................................................................107 12.8 CONT/LOG - Schéma à contacts/logigramme..........................................................................108 12.8.1 Les langages de programmation CONT et LOG.......................................................................108 12.8.2 Créer une source CONT/LOG...................................................................................................109 12.8.3 Créer un programme CONT/LOG.............................................................................................110 12.8.4 Créer un programme d'exemple CONT....................................................................................111 12.8.5 Sauvegarder le programme CONT/LOG...................................................................................115 12.9 Autres langages de programmation..........................................................................................116 12.10 Résultat dans le projet d'exemple.............................................................................................116
13 Configurer le système exécutif.................................................................................................................117 13.1 Vue d'ensemble.........................................................................................................................117 13.2 Système exécutif.......................................................................................................................117 13.3 Affecter des programmes aux tâches........................................................................................117 13.4 Charger le système exécutif configuré dans le système cible...................................................119 13.5 Résultat dans le projet d'exemple.............................................................................................120
14 Démarrer et arrêter le système.................................................................................................................121 14.1 Vue d'ensemble.........................................................................................................................121 14.2 Etats de fonctionnement RUN et STOP....................................................................................121
Sommaire
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 7
14.3 Sélecteur de mode de fonctionnement côté logiciel et côté matériel........................................122 14.4 Démarrer la commande par programme du projet d'exemple...................................................124
15 Visualiser l'application..............................................................................................................................125 15.1 Vue d'ensemble.........................................................................................................................125 15.2 Visualiser l'exécution du programme........................................................................................125 15.3 Visualiser des variables dans le navigateur de mnémoniques..................................................127 15.4 Visualiser des variables dans la table des surveillances...........................................................128 15.5 Enregistrer des signaux avec la fonction Trace........................................................................128 15.5.1 Trace.........................................................................................................................................128 15.5.2 Utiliser la fonction Trace............................................................................................................129 15.5.3 Fonctions de diagnostic complémentaires................................................................................133 15.6 Résultat dans le projet d'exemple.............................................................................................133
A Directives CSDE.......................................................................................................................................135 A.1 Définition CSDE........................................................................................................................135 A.2 Charge électrostatique de personnes.......................................................................................135 A.3 Mesures de protection de base contre les décharges électrostatiques....................................136
Index.........................................................................................................................................................137
Sommaire
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-28 Mise en route, 04/2014
Consignes de sécurité 11.1 Consignes de sécurité élémentaires
1.1.1 Consignes de sécurité générales
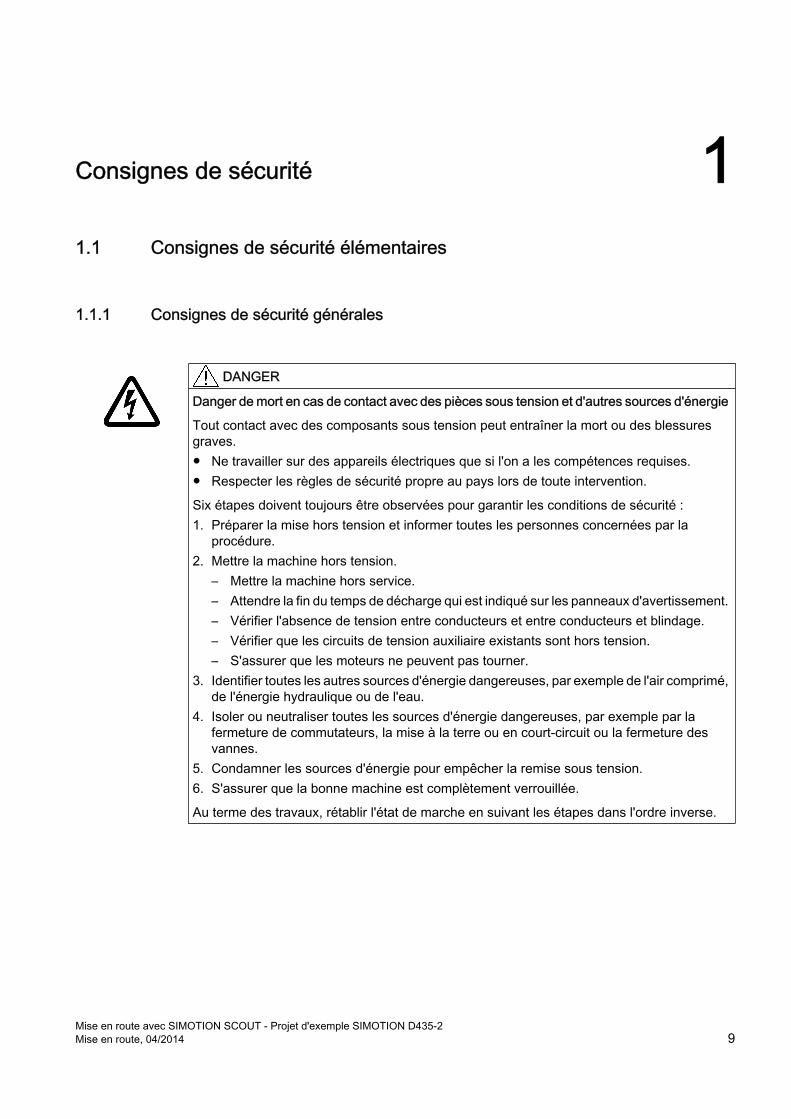
DANGER
Danger de mort en cas de contact avec des pièces sous tension et d'autres sources d'énergie
Tout contact avec des composants sous tension peut entraîner la mort ou des blessures graves.● Ne travailler sur des appareils électriques que si l'on a les compétences requises. ● Respecter les règles de sécurité propre au pays lors de toute intervention.
Six étapes doivent toujours être observées pour garantir les conditions de sécurité : 1. Préparer la mise hors tension et informer toutes les personnes concernées par la
procédure.2. Mettre la machine hors tension.
– Mettre la machine hors service. – Attendre la fin du temps de décharge qui est indiqué sur les panneaux d'avertissement. – Vérifier l'absence de tension entre conducteurs et entre conducteurs et blindage.– Vérifier que les circuits de tension auxiliaire existants sont hors tension.– S'assurer que les moteurs ne peuvent pas tourner.
3. Identifier toutes les autres sources d'énergie dangereuses, par exemple de l'air comprimé, de l'énergie hydraulique ou de l'eau.
4. Isoler ou neutraliser toutes les sources d'énergie dangereuses, par exemple par la fermeture de commutateurs, la mise à la terre ou en court-circuit ou la fermeture des vannes.
5. Condamner les sources d'énergie pour empêcher la remise sous tension. 6. S'assurer que la bonne machine est complètement verrouillée.
Au terme des travaux, rétablir l'état de marche en suivant les étapes dans l'ordre inverse.
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 9
ATTENTION
Danger de mort en raison d'une tension dangereuse lors du raccordement d'une alimentation non appropriée
Tout contact avec des parties sous tension peut entraîner des blessures graves ou la mort. ● Pour tous les connecteurs et toutes les bornes des modules électroniques, utiliser
uniquement des alimentations qui fournissent des tensions de sortie TBTS (très basse tension de sécurité) ou TBTP (très basse tension de protection).
ATTENTION
Danger de mort par contact avec des pièces sous tension en cas d'endommagement des appareils
Une manipulation inappropriée des appareils peut entraîner leur endommagement.
Lorsque les appareils sont endommagés, des tensions dangereuses risquent d'être présentes au niveau de l'enveloppe ou des composants accessibles et d'entraîner, en cas de contact, des blessures graves ou la mort. ● Lors du transport, du stockage et du fonctionnement, respecter les valeurs limites
indiquées dans les caractéristiques techniques. ● Ne jamais utiliser d'appareils endommagés.
ATTENTION
Danger de mort par choc électrique en cas de blindages de câbles non connectés
Le surcouplage capacitif peut causer des tensions de contact mortelles lorsque les blindages de câbles ne sont pas connectés.● Connecter les blindages de câbles et les conducteurs inutilisés des câbles d'énergie
(p. ex. conducteurs du frein) au potentiel de terre de l'enveloppe, au moins d'un côté.
ATTENTION
Danger de mort dû à un choc électrique en cas d'absence de mise à la terre
Lorsque des appareils de la classe de protection I ne sont pas connectés au conducteur de protection ou si cette connexion est incorrecte, des tensions élevées risquent d'être présentes au niveau de pièces accessibles et d'entraîner, en cas de contact, des blessures graves ou la mort.● Mettre l'appareil à la terre conformément aux directives.
Consignes de sécurité1.1 Consignes de sécurité élémentaires
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-210 Mise en route, 04/2014
ATTENTION
Danger de mort par propagation d'incendie lorsque les enveloppes sont insuffisantes.
Le feu et le dégagement de fumée peuvent provoquer de graves blessures ou d'importants dégâts matériels. ● Encastrer les appareils sans enveloppe de protection dans une armoire métallique (ou
protéger l'appareil par des mesures équivalentes) de sorte à empêcher tout contact avec le feu.
● S'assurer que la fumée s'échappe uniquement par des voies prévues à cet effet.
ATTENTION
Danger de mort en raison de mouvements intempestifs des machines lors de l'utilisation d'émetteurs/récepteurs radio mobiles ou de téléphones portables
L'utilisation d'émetteurs/récepteurs radio mobiles ou de téléphones portables d'une puissance émettrice > 1 W à une distance inférieure à 2 m des composants peut induire des perturbations dans le fonctionnement des appareils, qui ont des conséquences sur la sécurité fonctionnelle des machines et peuvent ainsi mettre en danger des personnes ou entraîner des dégâts matériels.● Eteindre les émetteurs/récepteurs radio ou les téléphones portables se trouvant à
proximité immédiate des composants.
ATTENTION
Danger de mort en cas d'incendie par surchauffe due à une ventilation insuffisante
Des dégagements de circulation d'air insuffisants peuvent entraîner une surchauffe des composants, à l'origine d'un incendie avec un dégagement de fumée susceptible de provoquer des blessures graves ou la mort. De plus, ils peuvent provoquer des défaillances plus fréquentes et réduire la durée de vie des appareils/systèmes. ● Respecter impérativement les distances minimales pour les dégagements de circulation
d'air indiquées pour chaque composant.
Consignes de sécurité1.1 Consignes de sécurité élémentaires
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 11
ATTENTION
Risque d'accident en cas de panneaux d'avertissement absents ou illisibles
L'absence ou l'illisibilité de panneaux d'avertissement peut provoquer des accidents ayant pour conséquence des blessures graves ou la mort. ● Contrôler la présence de tous les panneaux d'avertissement mentionnés dans la
documentation.● Apposer sur les composants les panneaux d'avertissement manquants, le cas échéant
dans la langue du pays concerné.● Remplacer les panneaux d'avertissement illisibles.
ATTENTION
Danger de mort en raison de fonctions Safety Integrated inactives
Des fonctions Safety Integrated inactives ou non adaptées peuvent être la cause de dysfonctionnements des machines risquant d'entraîner des blessures graves ou la mort. ● Tenir compte, avant la mise en service, des informations contenues dans la
documentation produit correspondante.● Effectuer, pour les fonctions conditionnant la sécurité, une évaluation de la sécurité de
l'ensemble du système, y compris de tous les constituants de sécurité.● S'assurer par un paramétrage adéquat que les fonctions de sécurité sont adaptées aux
tâches d'entraînement et d'automatisation et qu'elles sont activées. ● Effectuer un test des fonctions.● N'exploiter l'installation en production qu'après s'être assuré de l'exécution correcte des
fonctions conditionnant la sécurité.
RemarqueImportantes consignes de sécurité relatives aux fonctions Safety Integrated
Si vous voulez utiliser les fonctions Safety Integrated, tenez impérativement compte des consignes de sécurité indiquées dans les manuels Safety Integrated.
Consignes de sécurité1.1 Consignes de sécurité élémentaires
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-212 Mise en route, 04/2014
ATTENTION
Danger de mort lié à des dysfonctionnements de la machine suite à un paramétrage incorrect ou modifié
Un paramétrage incorrect ou modifié peut entraîner des dysfonctionnements sur les machines, susceptibles de provoquer des blessures, voire la mort.● Protéger les paramétrages de tout accès non autorisé.● Prendre les mesures appropriées pour remédier aux dysfonctionnements éventuels
(p. ex. un arrêt ou une coupure d'urgence).
1.1.2 Consignes de sécurité relatives aux champs électromagnétiques (CEM)
ATTENTION
Danger de mort dû aux champs électromagnétiques
Certaines installations électriques, comme les transformateurs, les variateurs, les moteurs, etc. génèrent des champs électromagnétiques (CEM) lorsqu'elles sont en fonctionnement.
Cela constitue un risque en particulier pour les personnes portant un stimulateur cardiaque ou un implant et qui se trouvent à proximité immédiate des appareils/systèmes.● S'assurer que les personnes concernées respectent la distance nécessaire (au moins
2 m).
1.1.3 Manipulation des composants sensibles aux décharges électrostatiques (ESD)Les composants sensibles aux décharges électrostatiques (ESD) sont des composants individuels, des connexions, modules ou appareils intégrés pouvant subir des endommagements sous l'effet de champs électrostatiques ou de décharges électrostatiques.
Consignes de sécurité1.1 Consignes de sécurité élémentaires
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 13
IMPORTANT
Endommagement dû à des champs électriques ou des décharges électrostatiques
Les champs électriques ou les décharges électrostatiques peuvent induire des dysfonctionnements en raison de composants individuels, de circuits intégrés, de modules ou d'appareils endommagés.● Emballer, stocker, transporter ou expédier les composants, modules ou appareils
électroniques uniquement dans l'emballage d'origine du produit ou dans d'autres matériaux appropriés comme du caoutchouc mousse ou du papier aluminium possédant des propriétés conductrices.
● Les personnes manipulant les composants, modules et appareils doivent être reliées à la terre par l'une des mesures suivantes :– Port d'un bracelet antistatique– Port de chaussures antistatiques ou de chaussures munies de bandes de terre
antistatiques dans les zones antistatiques pourvues de planchers conducteurs● Ne poser les composants, modules ou appareils électroniques que sur des surfaces
conductrices (table à revêtement antistatique, mousse conductrice antistatique, sachets antistatiques, conteneurs antistatiques).
1.1.4 Industrial Security
RemarqueIndustrial Security
Siemens commercialise des produits et solutions comprenant des fonctions de sécurité industrielle qui contribuent à une exploitation sûre des installations, solutions, machines, équipements et/ou réseaux. Ces fonctions jouent un rôle important dans un système global de sécurité industrielle. Dans cette optique, les produits et solutions Siemens font l’objet de développements continus. Siemens vous recommande donc vivement de vous tenir régulièrement informé des mises à jour des produits.
Pour garantir une exploitation fiable des produits et solutions Siemens, il est nécessaire de prendre des mesures de protection adéquates (par ex. concept de protection des cellules) et d’intégrer chaque composant dans un système de sécurité industrielle global et moderne. Tout produit tiers utilisé devra également être pris en considération. Pour plus d’informations sur la sécurité industrielle, rendez-vous sur http://www.siemens.com/industrialsecurity.
Veuillez vous abonner à la newsletter d’un produit particulier afin d’être informé des mises à jour dès qu’elles surviennent. Pour plus d’informations, rendez-vous sur http://support.automation.siemens.com
Consignes de sécurité1.1 Consignes de sécurité élémentaires
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-214 Mise en route, 04/2014
ATTENTION
Danger dû à des états de fonctionnement non sûrs en raison d'une manipulation du logiciel
Les manipulations du logiciel (p. ex. les virus, chevaux de Troie, logiciels malveillants, vers) peuvent provoquer des états de fonctionnement non sûrs de l'installation, susceptibles de provoquer des blessures graves ou mortelles ainsi que des dommages matériels.● Maintenez le logiciel à jour.
Vous trouverez des informations complémentaires et les lettres d'information sur ce thème à l'adresse suivante : http://support.automation.siemens.com
● Intégrez les composants d'entraînement et d'automatisation dans un concept global de sécurité industrielle (Industrial Security) de l'installation ou de la machine selon l'état actuel de la technique.Vous trouverez de plus amples informations sur : http://www.siemens.com/industrialsecurity
● Tenez compte de tous les produits mis en œuvre dans le concept global de sécurité industrielle (Industrial Security).
1.1.5 Risques résiduels des systèmes d'entraînement (Power Drive Systems)Les constituants de la commande et de l'entraînement d'un système d'entraînement sont autorisés pour une utilisation industrielle et professionnelle dans des réseaux industriels. Leur mise en œuvre dans des réseaux publics exige une autre configuration et/ou des mesures supplémentaires.
La mise en œuvre de ces constituants est autorisée uniquement dans des enveloppes fermées ou dans des armoires avec des recouvrements fermés, l'utilisation de l'ensemble des dispositifs de protection étant obligatoire.
La manipulation de ces constituants est réservée aux personnes qui sont qualifiées et formées à cet effet et qui connaissent et respectent toutes les consignes de sécurité figurant sur ces constituants et dans la documentation technique de l'utilisateur.
Pour évaluer les risques de sa machine conformément à la réglementation locale (par exemple la directive machines de la CE), le constructeur de machines doit tenir compte des risques résiduels suivants émanant des constituants de la commande et de l'entraînement d'un système d'entraînement :
Consignes de sécurité1.1 Consignes de sécurité élémentaires
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 15
1. Mouvements intempestifs des pièces entraînées de la machine lors de la mise en service, de l'exploitation, de la maintenance et de la réparation, provoqués par exemple par :
– des défauts matériels et/ou logiciels des capteurs, de la commande, des actionneurs et de la connectique,
– les temps de réponse de la commande et de l'entraînement,
– des conditions d'exploitation et/ou d'environnement ne correspondant pas à la spécification,
– de la condensation / un encrassement ayant des propriétés conductrices,
– une erreur de paramétrage, de programmation, de connexion ou de montage,
– l'utilisation d'appareils radio / de téléphones mobiles à proximité immédiate de la commande,
– des influences externes / endommagements.
2. En cas de défaut, des températures particulièrement élevées peuvent apparaître à l'intérieur et à l'extérieur du variateur, avec éventuellement développement de flammes ; l'appareil est susceptible d'émettre de la lumière, des bruits, des particules, des gaz, etc., par exemple :
– des composants défaillants,
– des défauts logiciels,
– des conditions d'exploitation et/ou d'environnement ne correspondant pas à la spécification,
– des influences externes / endommagements.
Les variateurs au degré de protection Open Type / IP20 doivent être encastrés dans une armoire métallique (ou protégés par des mesures équivalentes) de sorte à empêcher tout contact avec du feu à l'intérieur ou à l'extérieur du variateur.
3. Tensions de contact dangereuses, provoquées par exemple par :
– des composants défaillants,
– l'influence de charges électrostatiques,
– des tensions induites par des moteurs en mouvement,
– des conditions d'exploitation et/ou d'environnement ne correspondant pas à la spécification,
– de la condensation / un encrassement ayant des propriétés conductrices,
– des influences externes / endommagements.
4. Champs électriques, magnétiques et électromagnétiques liés au fonctionnement et pouvant par exemple présenter un danger pour les porteurs d'un stimulateur cardiaque, d'un implant ou d'objets métalliques en cas de distance insuffisante.
5. Dégagement de substances et d'émissions nocives pour l'environnement en cas de fonctionnement non conforme et/ou d'élimination incorrecte des constituants.
Consignes de sécurité1.1 Consignes de sécurité élémentaires
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-216 Mise en route, 04/2014
Remarque
Les constituants doivent être protégés contre les salissures conductrices, par exemple par l'installation dans une armoire avec un degré de protection IP54 selon CEI 60529 ou NEMA 12.
Si l'apparition de salissures conductrices peut être exclue sur le lieu d'installation, un degré de protection inférieur est admis pour l'armoire.
Vous trouverez de plus amples informations concernant les risques résiduels des composants d'un système d'entraînement dans les chapitres correspondants de la documentation technique de l'utilisateur.
1.2 Consignes de sécurité spécifiquesVérifiez que votre système d'apprentissage est entièrement déconnecté du mode de production.
Respecter les consignes de sécurité qui figurent dans la documentation des appareils utilisés.
Consignes de sécurité1.2 Consignes de sécurité spécifiques
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 17

Mise en route avec SIMOTION SCOUT 22.1 But de la mise en route
La mise en route est une introduction à l'utilisation du système d'ingénierie SIMOTION SCOUT. Vous créez un projet d'exemple simple et parcourez toutes les étapes typiques de la configuration d'un appareil, d'un entraînement et d'un axe. Vous découvrez les principaux outils mis à disposition par SIMOTION SCOUT pour la configuration, la programmation et le diagnostic.
2.2 Projet d'exempleLa mise en route contient les instructions nécessaires pour vous permettre de créer un projet d'exemple simple.
Etapes de configuration
Préparer la configuration● Vous rétablissez les réglages usine de l'appareil SIMOTION.
● Vous configurez les interfaces pour la communication réseau de la PG/du PC avec l'appareil SIMOTION.
Créer le projet, configurer l'appareil SIMOTION et la communication réseau avec la PG/le PC● Vous créez un projet.
● Vous créez un appareil SIMOTION et configurez la communication réseau entre la PG/le PC et l'appareil SIMOTION.
Configurer l'entraînement● Vous mettez l'entraînement en service.
Configurer l'alimentation● Vous connectez l'alimentation à l'entraînement.
Configurer et tester un axe● Vous configurez un axe.
● Vous connectez l'axe à l'entraînement.
● Vous testez l'axe à l'aide du tableau de commande axe.
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 19
Configurer les entrées/sorties● Vous configurez les E/S pour les utiliser dans le programme d'exemple.
Programmer, configurer et visualiser SIMOTION● Vous écrivez un programme utilisateur SIMOTION simple commandant l'axe configuré.
– Vous créez les variables dont le programme a besoin.
– Vous créez le programme et les programmes auxiliaires supplémentaires dans les éditeurs graphiques.
● Vous affectez les programmes finis aux tâches du système exécutif.
● Vous lancez l'exécution des programmes dans le système exécutif SIMOTION.
● Vous visualisez le mouvement de l'axe commandé par le programme.
– Vous visualisez l'exécution du programme.
– Vous visualisez les valeurs dans le navigateur de mnémoniques.
– Vous regroupez des valeurs dans une table des surveillances.
– Vous enregistrez la séquence de mouvements de l'axe avec la fonction Trace.
Étendue du projet d'exempleLa documentation SIMOTION comprend deux versions de la mise en route avec différents projets d'exemple complets :
● Version à imprimer de la mise en route : La présente version à imprimer traite de la configuration d'un appareil SIMOTION D435‑2. La configuration de l'entraînement fait appel à une configuration automatique et seule celle-ci est décrite.
● Version Aide en ligne de la mise en route : La mise en route que vous trouvez dans l'aide en ligne de SIMOTION SCOUT est d'ordre plus général. Le projet d'exemple présenté dans cette version tient compte des trois plates-formes SIMOTION C, SIMOTION D et SIMOTION P. En outre, la version Aide en ligne décrit :
– la configuration de l'entraînement à l'aide de l'assistant entraînement
– le test de l'entraînement avec le tableau de commande de l'entraînement
– la configuration d'un axe virtuel. L'axe virtuel n'a pas besoin d'un entraînement
Vous trouverez la version générale de la mise en route dans l'aide en ligne à la rubrique Mise en route de SIMOTION SCOUT.
Projet d'exemple terminéLe projet d'exemple terminé est contenu dans les "SIMOTION Utilities & Applications". Vous l'y trouverez sous Exemples > Mise en route.
Vous trouverez des indications sur les Utilities & Applications plus loin, au chapitre Utilitaires et applications (Page 24).
Mise en route avec SIMOTION SCOUT2.2 Projet d'exemple
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-220 Mise en route, 04/2014
Après la mise en routeAprès la mise en route, nous vous recommandons de poursuivre votre familiarisation avec SIMOTION SCOUT à l'aide des projets d'exemple des Utilities & Applications.
Vous trouverez des indications sur les Utilities & Applications plus loin, au chapitre Utilitaires et applications (Page 24).
2.3 Prérequis
Système d'apprentissagePour créer le projet d'exemple, vous avez besoin d'un système d'apprentissage comprenant quelques composants :
● Appareil SIMOTION D435-2 équipé du firmware le plus récent V4.4
● PG/PC avec carte interface EthernetUn adaptateur Ethernet USB convient également pour la connexion Ethernet.
● Entraînement SINAMICS avec alimentation, partie puissance et moteur pour le fonctionnement d'un axe
● Câblage DRIVE‑CLiQ intégral des composants ; moteur avec interface DRIVE‑CLiQ et, par conséquent, avec identification automatique du codeur (SMI Sensor Module Integrated)
● Système d'ingénierie SIMOTION SCOUT
Un appareil SIMOTION D435-2 DP/PN est utilisé dans le projet d'exemple. Vous pouvez toutefois utiliser un appareil D4x5-2 quelconque.
L'interface PROFINET de l'appareil SIMOTION n'est pas utilisée dans le projet d'exemple. Il sera uniquement fait référence à PROFINET lors de la création de l'appareil SIMOTION dans le projet, afin de représenter l'ensemble des étapes de travail.
Remarque
La mise en route traite la configuration automatique de l'entraînement, mais pas la configuration réalisée à l'aide de l'assistant entraînement. Pour la réalisation complète de la configuration automatique de l'axe, le câblage DRIVE‑CLiQ intégral de tous les composants impliqués est indispensable.
Préparation du système d'apprentissageVotre système d'apprentissage est préparé pour réaliser la configuration avec SIMOTION SCOUT :
● Le matériel est entièrement monté et câblé.
● La carte CF comportant le firmware le plus récent V4.4 est insérée.
● La PG/le PC et la SIMOTION D435-2 sont directement reliés par un câble Ethernet. L'interface Ethernet X127 de la SIMOTION D435‑2 est utilisée pour la connexion.
● SIMOTION SCOUT est installé sur la PG/le PC et dispose d'une licence valide.
Mise en route avec SIMOTION SCOUT2.3 Prérequis
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 21
● Vous avez démarré le système SIMOTION SCOUT. Le Workbench SIMOTION SCOUT est affiché sur l'écran de la PG/du PC.
● Aucun projet n'est ouvert dans SIMOTION SCOUT.
2.4 Informations générales
2.4.1 Aide en ligne de SIMOTION SCOUTSIMOTION SCOUT dispose d'une aide en ligne particulièrement étendue. Celle-ci se compose d'une aide en ligne globale générale et d'une aide contextuelle.
Pour ouvrir l'aide globale, procédez comme suit :● Sélectionnez l'option de menu Aide > Rubriques d'aide ou
● appuyez sur la touche F1.
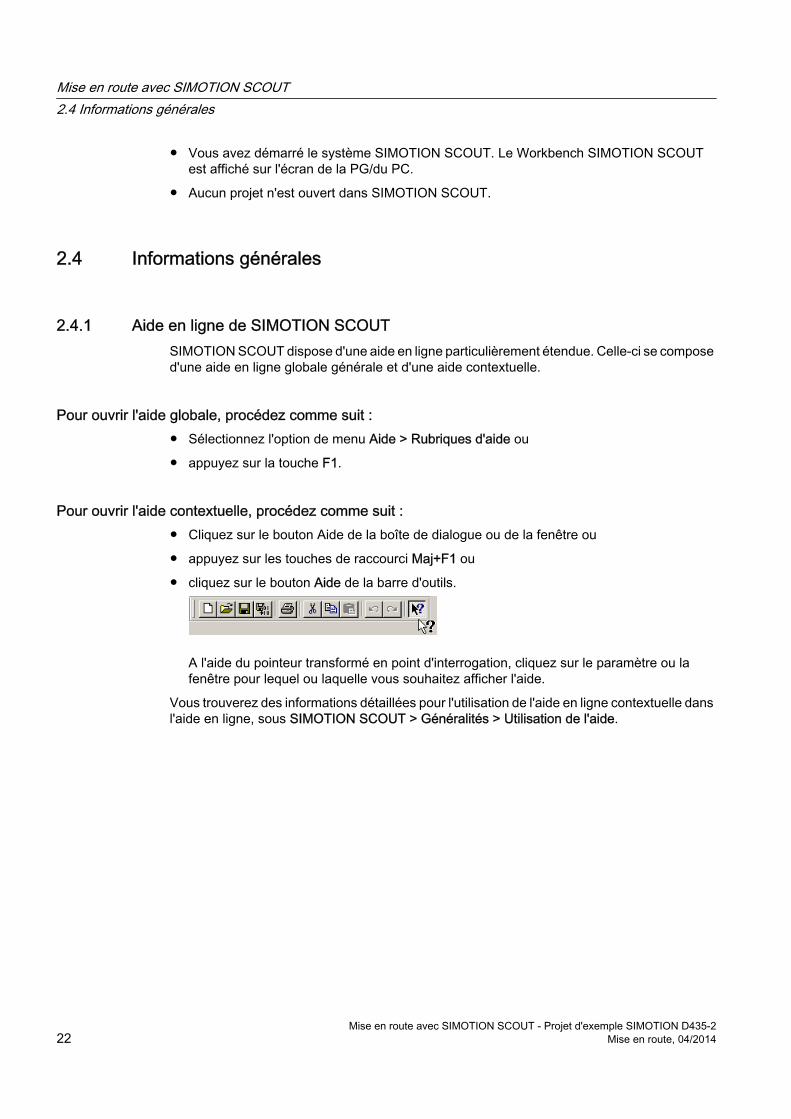
Pour ouvrir l'aide contextuelle, procédez comme suit :● Cliquez sur le bouton Aide de la boîte de dialogue ou de la fenêtre ou
● appuyez sur les touches de raccourci Maj+F1 ou
● cliquez sur le bouton Aide de la barre d'outils.
A l'aide du pointeur transformé en point d'interrogation, cliquez sur le paramètre ou la fenêtre pour lequel ou laquelle vous souhaitez afficher l'aide.
Vous trouverez des informations détaillées pour l'utilisation de l'aide en ligne contextuelle dans l'aide en ligne, sous SIMOTION SCOUT > Généralités > Utilisation de l'aide.
Mise en route avec SIMOTION SCOUT2.4 Informations générales
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-222 Mise en route, 04/2014
Recherche de texte intégral dans l'aide en ligneVous trouverez d'importantes informations concernant la recherche de texte intégral dans l'aide en ligne, sous Notions de base > Utilisation de l'aide en ligne et des diagrammes fonctionnels > Utilisation de l'aide en ligne > Recherche de texte intégral.
RemarqueRecherche de texte intégral dans l'aide en ligne
Mettez le terme recherché entre astérisques * afin d'obtenir également des résultats de recherche contenant le terme recherché en tant que partie d'une chaîne de caractères plus longue. Voici un exemple : ● variable permet uniquement de trouver des mots entiers ("variable" ou "Variable").● *variable* permet en plus de trouver "variables système", "affectation des variables", etc.
2.4.2 Documentation disponible
Documentation électroniqueLa documentation SIMOTION est comprise sous forme de documentation électronique dans la fourniture de SIMOTION SCOUT (DVD SIMOTION SCOUT Documentation, Utilitaires & Applications). Vous pouvez effectuer une recherche dans tous les documents PDF de la documentation électronique à l'aide d'un index (SIMOTION.pdx). Le document séparé Vue d'ensemble de la documentation SIMOTION vous donne une vue d'ensemble de la structure et du contenu de la documentation PDF SIMOTION.
Sauf quelques exceptions, le contenu des documents est également disponible dans l'aide en ligne de SIMOTION SCOUT.
Dans l'aide en ligne, vous trouverez la Vue d'ensemble de la documentation SIMOTION sous Vue d'ensemble de la documentation SIMOTION > … > Vue d'ensemble de la documentation SIMOTION.
Vue d'ensemble de SIMOTIONVous trouverez une vue d'ensemble de SIMOTION dans l'aide en ligne, sous Notions de base > Fonctions de base > Vue d'ensemble du système.
Les manuels contiennent en particulier des informations détaillées pour la configuration et la mise en service d'une SIMOTION D (voir Manuel SIMOTION D4x5-2 et Manuel de mise en service et de montage SIMOTION D4x5-2). Vous trouverez également les manuels SIMOTION D dans l'aide en ligne, sous Appareils SIMOTION > SIMOTION D.
2.4.3 Générateur de projetSIMOTION easyProject permet d'intégrer rapidement et confortablement dans un nouveau projet ou dans un projet existant les fonctions de base qui sont requises dans pratiquement
Mise en route avec SIMOTION SCOUT2.4 Informations générales
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 23
toutes les applications SIMOTION. Les composants et les fonctions souhaités sont sélectionnés et configurés à cet effet dans des boîtes de dialogue. Ceci permet d'éviter une programmation complexe et de garantir une conception du projet harmonisée et standardisée tout en réduisant les possibilités d'erreur. À partir de SIMOTION SCOUT V4.4, le générateur de projet peut être démarré directement depuis SIMOTION SCOUT.
Le générateur de projet n'est pas utilisé dans la mise en route.
2.4.4 Utilitaires et applicationsLes utilitaires et applications SIMOTION gratuits vous fournissent de nombreuses informations complémentaires importantes sur SIMOTION, sur les outils, les fonctions spéciales, les blocs et les exemples de projet SIMOTION, ainsi que sur les applications standard proposées. Ces informations vous apportent des éclaircissements ou vous aideront pour l'utilisation dans vos projets. Vous y trouverez également des informations détaillées sur l'écriture de scripts et de nombreux exemples de scripts qui vous faciliteront l'utilisation de SIMOTION.
1. FAQQuestions fréquentes intéressantes concernant par exemple la commande d'axes hydrauliques ou des questions de communication.
2. ScriptsDe nombreux scripts avec de petits utilitaires mais aussi des solutions complètes qui vous permettent de réaliser plus aisément les tâches répétitives.
3. Outils et documentationsVous trouverez des outils applicables de manière simple ainsi que des documentations approfondies pour de nombreuses tâches.
4. ExemplesExemples de projets pour les débutants (par exemple la "Mise en route" ainsi que des exemples sur des thèmes spécifiques).
5. ApplicationsUn grand nombre d'applications qui vous fournissent déjà une base solide vous est proposé pour SIMOTION. À l'aide de la documentation fournie, vous pouvez utiliser, adapter et étendre ces applications de base pour votre utilisation.Dans les applications multisecteurs, vous disposez en outre de fonctions qui vous seront utiles de manière générale pour la création de vos propres applications, telles qu'une bibliothèque LDPV1 pour la communication des entraînements via les services DPV1 (lecture et écriture de paramètres SINAMICS, lecture des défauts et alarmes SINAMICS, désactivation d'objets, coordination du démarrage, et bien davantage) ou la bibliothèque LCom avec des fonctions destinées à la communication TCP/IP pour SIMOTION et SIMATIC.Le nouveau générateur de projet SIMOTION easyProject vous permet d'accélérer notablement la création d'une base de projet standard pour les applications machine et de réaliser ainsi une économie de coûts.
6. SIMOTION ITSous le terme SIMOTION IT; vous trouverez des exemples et outils innovants visant à rapprocher les solutions de commande et d'entraînement des technologies de l'information. Parmi ceux-ci, vous trouverez une fonction Trace exécutée via un navigateur Internet ainsi que des exemples de pages Web personnalisées pour le serveur Web SIMOTION IT ou pour l'utilisation d'OPC XML DA.
Mise en route avec SIMOTION SCOUT2.4 Informations générales
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-224 Mise en route, 04/2014
Préparer la configuration 33.1 Rétablir les réglages usine
Pour le projet d'exemple, il est judicieux de rétablir les réglages usine de l'appareil SIMOTION.
Vous rétablissez ainsi les paramètres de communication par défaut et supprimez les données utilisateur chargées sur l'appareil et la carte CF à l'occasion d'une configuration antérieure. Les licences Runtime sont conservées.
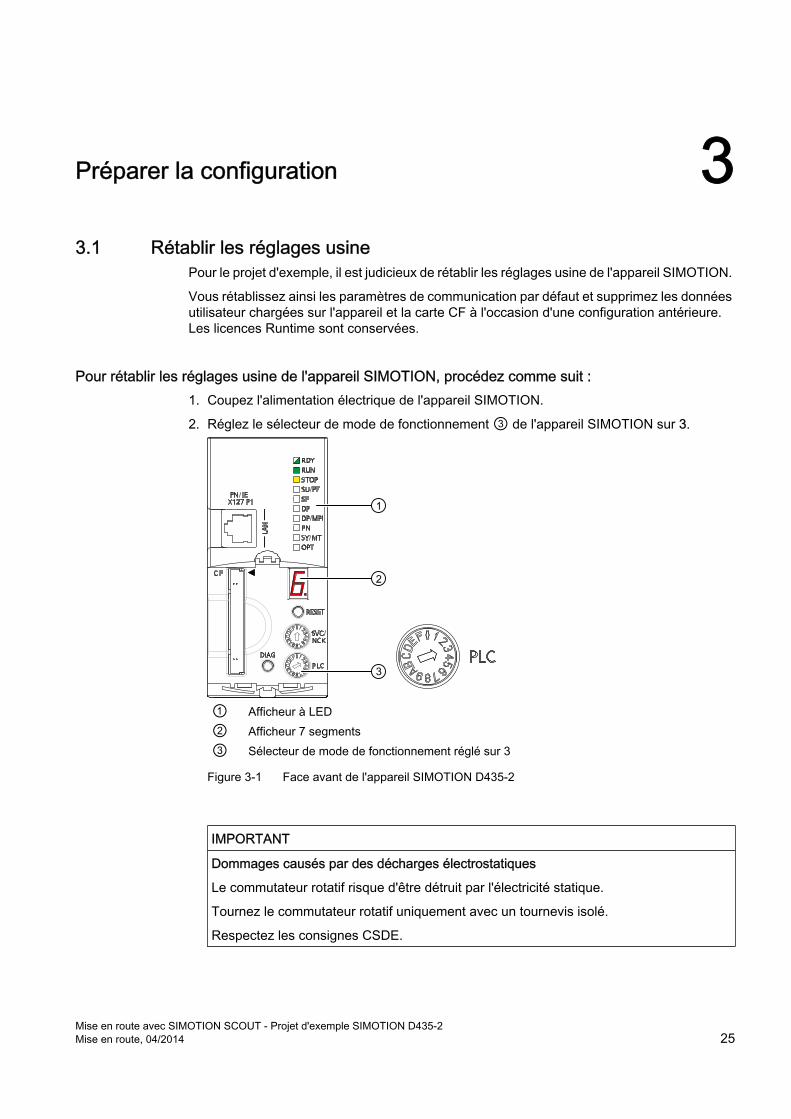
Pour rétablir les réglages usine de l'appareil SIMOTION, procédez comme suit :1. Coupez l'alimentation électrique de l'appareil SIMOTION.
2. Réglez le sélecteur de mode de fonctionnement ③ de l'appareil SIMOTION sur 3.
① Afficheur à LED② Afficheur 7 segments③ Sélecteur de mode de fonctionnement réglé sur 3
Figure 3-1 Face avant de l'appareil SIMOTION D435‑2
IMPORTANT
Dommages causés par des décharges électrostatiques
Le commutateur rotatif risque d'être détruit par l'électricité statique.
Tournez le commutateur rotatif uniquement avec un tournevis isolé.
Respectez les consignes CSDE.
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 25

3. Mettez l'appareil SIMOTION sous tension.Le chargement des réglages usine commence. L'appareil SIMOTION D435‑2 passe à l'état de fonctionnement STOP.Patientez jusqu'à ce que l'opération soit terminée. Les éléments de la face avant de l'appareil signalent la fin de l'opération :
– L'afficheur 7 segments ② affiche le chiffre d'état 6 : le démarrage de l'appareil SIMOTION D435-2 est terminé.
– LED ① :La LED RDY verte clignote (0,5 Hz) : l'appareil SIMOTION est prêt pour la mise en service.La LED STOP jaune est allumée : l'appareil SIMOTION est dans l'état de fonctionnement STOP.Toutes les autres LED sont éteintes.
4. Réglez le sélecteur de mode de fonctionnement ③ sur 0.
– La LED RUN verte est allumée : l'appareil SIMOTION est passé à l'état de fonctionnement RUN.
RésultatLes réglages usine de l'appareil SIMOTION ont été rétablis et l'appareil est prêt pour la mise en service.
3.2 Configurer l'interface pour la communication en ligne
La communication en ligne de la PG/du PC avec l'appareil SIMOTION peut être établie via PROFIBUS, PROFINET ou Industrial Ethernet. Le projet d'exemple se limite au cas le plus fréquent : la communication via Industrial Ethernet.
La configuration de l'interface Ethernet se fait en deux étapes :
● Vous placez l'adresse Ethernet de la PG/du PC dans le sous-réseau par défaut de l'appareil SIMOTION.
● Vous affectez l'adresse Ethernet à un point d'accès dans SIMOTION SCOUT.
Préparer la configuration3.2 Configurer l'interface pour la communication en ligne
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-226 Mise en route, 04/2014
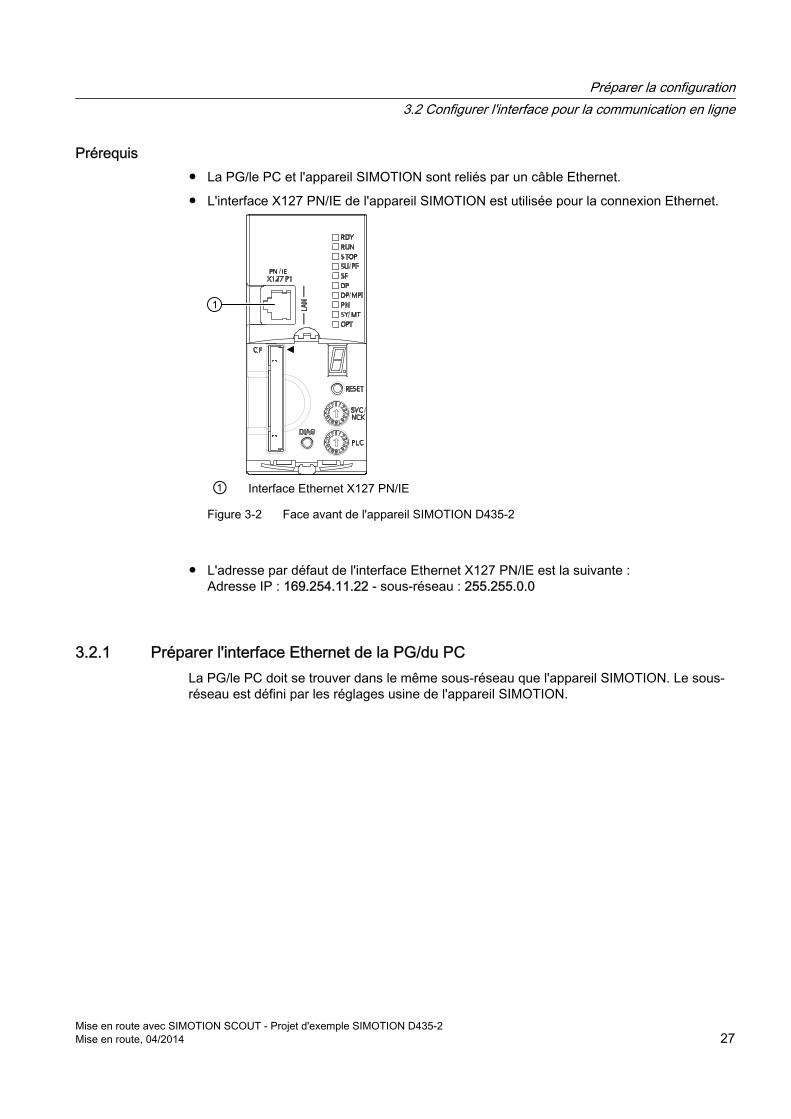
Prérequis● La PG/le PC et l'appareil SIMOTION sont reliés par un câble Ethernet.
● L'interface X127 PN/IE de l'appareil SIMOTION est utilisée pour la connexion Ethernet.
① Interface Ethernet X127 PN/IE
Figure 3-2 Face avant de l'appareil SIMOTION D435‑2
● L'adresse par défaut de l'interface Ethernet X127 PN/IE est la suivante :Adresse IP : 169.254.11.22 - sous-réseau : 255.255.0.0
3.2.1 Préparer l'interface Ethernet de la PG/du PCLa PG/le PC doit se trouver dans le même sous-réseau que l'appareil SIMOTION. Le sous-réseau est défini par les réglages usine de l'appareil SIMOTION.
Préparer la configuration3.2 Configurer l'interface pour la communication en ligne
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 27
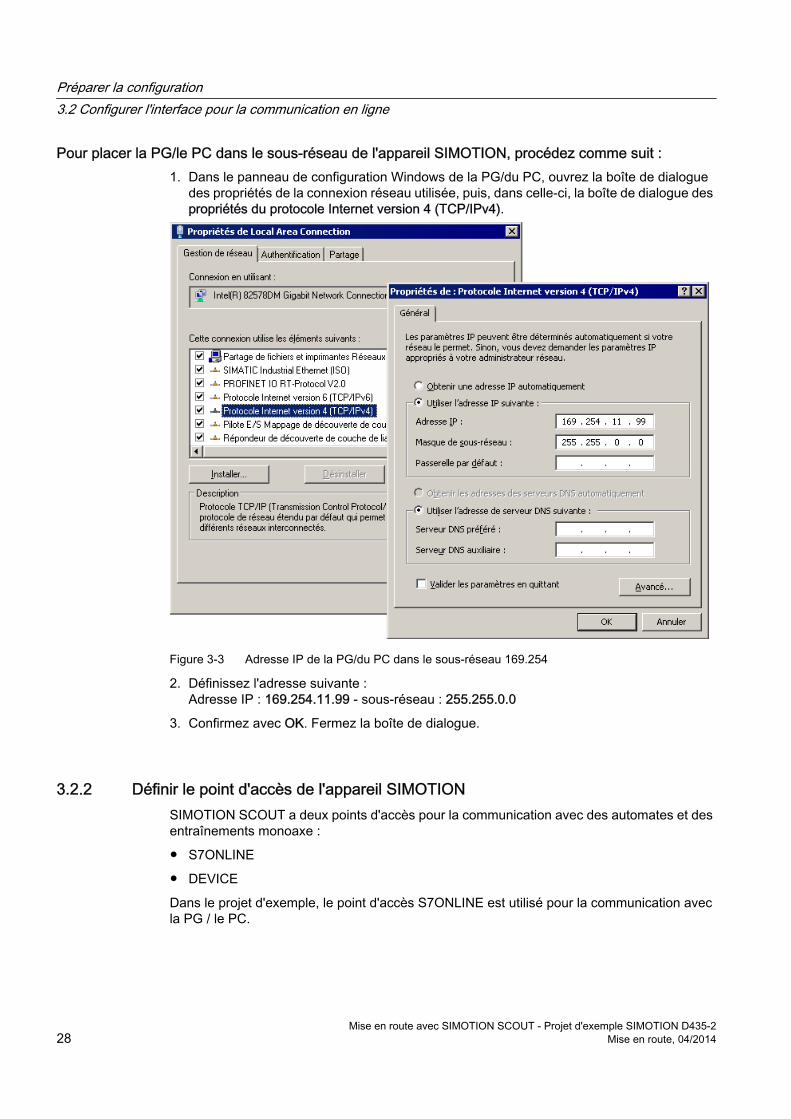
Pour placer la PG/le PC dans le sous-réseau de l'appareil SIMOTION, procédez comme suit :1. Dans le panneau de configuration Windows de la PG/du PC, ouvrez la boîte de dialogue
des propriétés de la connexion réseau utilisée, puis, dans celle-ci, la boîte de dialogue des propriétés du protocole Internet version 4 (TCP/IPv4).
Figure 3-3 Adresse IP de la PG/du PC dans le sous-réseau 169.254
2. Définissez l'adresse suivante : Adresse IP : 169.254.11.99 - sous-réseau : 255.255.0.0
3. Confirmez avec OK. Fermez la boîte de dialogue.
3.2.2 Définir le point d'accès de l'appareil SIMOTIONSIMOTION SCOUT a deux points d'accès pour la communication avec des automates et des entraînements monoaxe :
● S7ONLINE
● DEVICE
Dans le projet d'exemple, le point d'accès S7ONLINE est utilisé pour la communication avec la PG / le PC.
Préparer la configuration3.2 Configurer l'interface pour la communication en ligne
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-228 Mise en route, 04/2014
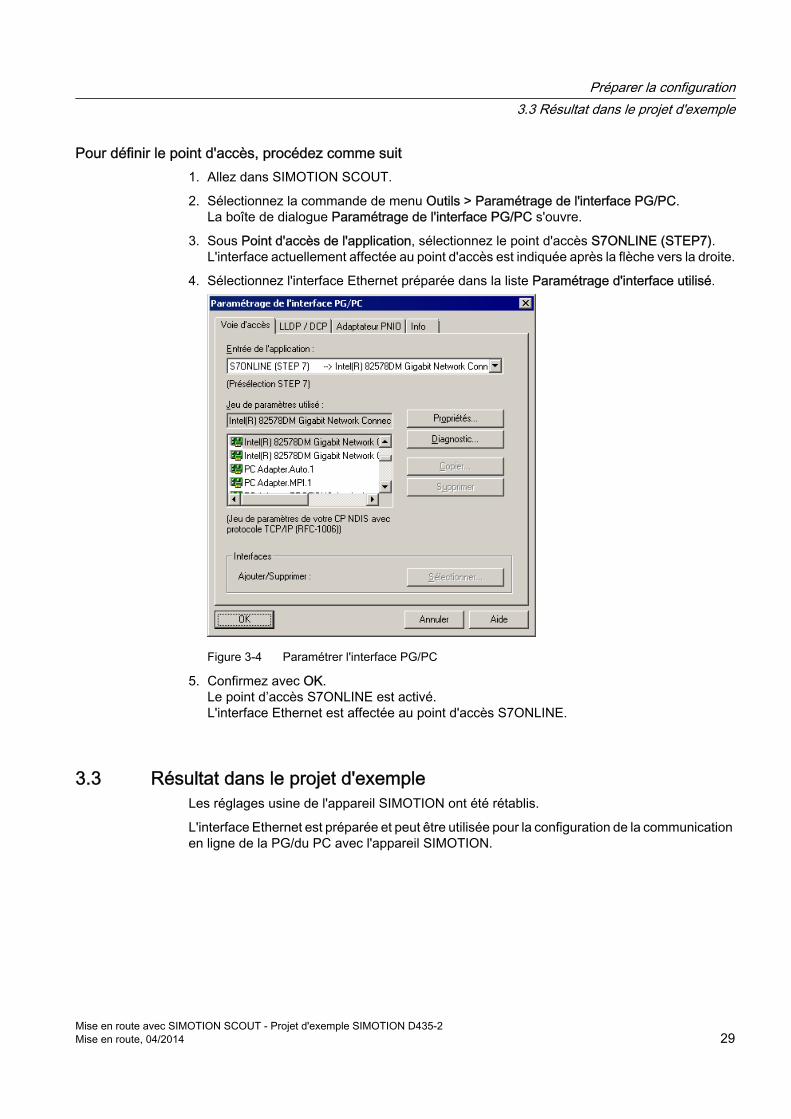
Pour définir le point d'accès, procédez comme suit1. Allez dans SIMOTION SCOUT.
2. Sélectionnez la commande de menu Outils > Paramétrage de l'interface PG/PC.La boîte de dialogue Paramétrage de l'interface PG/PC s'ouvre.
3. Sous Point d'accès de l'application, sélectionnez le point d'accès S7ONLINE (STEP7).L'interface actuellement affectée au point d'accès est indiquée après la flèche vers la droite.
4. Sélectionnez l'interface Ethernet préparée dans la liste Paramétrage d'interface utilisé.
Figure 3-4 Paramétrer l'interface PG/PC
5. Confirmez avec OK.Le point d’accès S7ONLINE est activé.L'interface Ethernet est affectée au point d'accès S7ONLINE.
3.3 Résultat dans le projet d'exempleLes réglages usine de l'appareil SIMOTION ont été rétablis.
L'interface Ethernet est préparée et peut être utilisée pour la configuration de la communication en ligne de la PG/du PC avec l'appareil SIMOTION.
Préparer la configuration3.3 Résultat dans le projet d'exemple
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 29

Créer un projet 44.1 Vue d'ensemble
But de la mise en routeDans ce chapitre de la mise en route, vous créez le projet d'exemple Sample_1. Toutes les étapes de configuration suivantes se rapporteront à ce projet d'exemple.
4.2 ProjetUn projet contient l'ensemble des informations qui décrivent une machine et son fonctionnement : données de configuration, programmes, profils de déplacement et paramètres d'entraînement.
Un projet peut contenir plusieurs appareils SIMOTION.
4.3 Créer un nouveau projet
Pour créer un nouveau projet, procédez comme suit :Vous démarrez une nouvelle configuration dans SIMOTION SCOUT en créant un nouveau projet.
1. Dans la barre de menus, sélectionnez Projet > Nouveau. La boîte de dialogue Nouveau projet s'affiche.
2. Saisissez le nom du projet, par exemple Sample_1, sous Nom.
3. Sous Lieu de stockage (chemin), indiquez le chemin du dossier dans lequel le projet doit être enregistré. Le chemin par défaut est préréglé.
4. Confirmez la création en cliquant sur OK.La boîte de dialogue se ferme.
Informations supplémentaires sur la création d'un nouveau projet
Chemin par défaut du projetLe chemin par défaut dépend du système d'exploitation :
● Windows XPC:\Program Files\Siemens\Step7\s7proj
● Windows 7C:\Program Files (x86)\Siemens\Step7\s7proj
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 31
Nom du projet et nom du répertoire du projetLa longueur maximale du nom d'un projet SIMOTION SCOUT est de 24 caractères. Le nom complet du projet s'affiche dans les boîtes de dialogue.
Lors du premier enregistrement du projet, SIMOTION SCOUT crée le nom du répertoire à partir des 8 premiers caractères du nom du projet. SIMOTION SCOUT résout les conflits générés par la réduction à 8 caractères des noms, au moyen d'un compteur numérique "_1", "_2", … . Le numéro du compteur remplace les derniers caractères du nom de répertoire.
Remarque
Il est recommandé de choisir le nom de projet de manière à ce que les 8 premiers caractères soient univoques. Le nom de projet et le nom de répertoire dérivé désignent ainsi clairement le même projet.
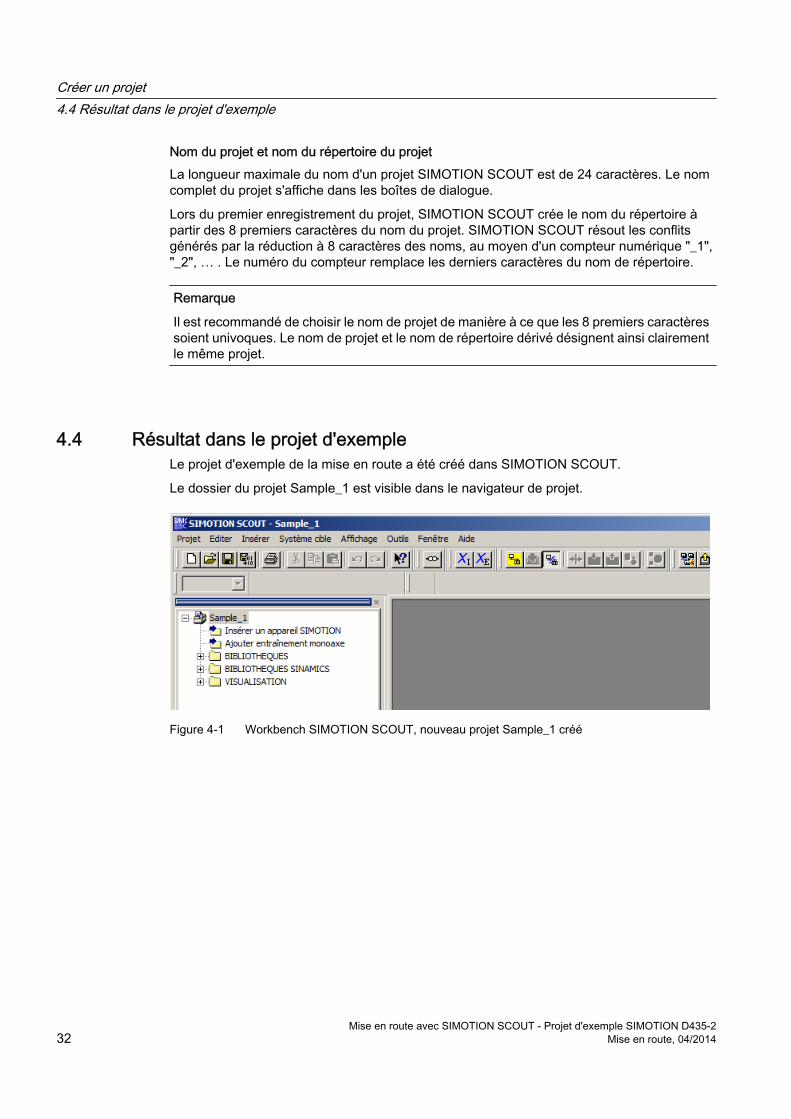
4.4 Résultat dans le projet d'exempleLe projet d'exemple de la mise en route a été créé dans SIMOTION SCOUT.
Le dossier du projet Sample_1 est visible dans le navigateur de projet.
Figure 4-1 Workbench SIMOTION SCOUT, nouveau projet Sample_1 créé
Créer un projet4.4 Résultat dans le projet d'exemple
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-232 Mise en route, 04/2014
Créer un appareil SIMOTION et configurer la communication en ligne 55.1 Vue d'ensemble
But de la mise en routeCe chapitre de la mise en route décrit comment créer un appareil SIMOTION dans le projet et configurer la communication entre la PG/le PC et l'appareil SIMOTION.
5.2 Plate-forme SIMOTION DSIMOTION D est la version du système Motion Control de SIMOTION, qui est basée sur la famille d'entraînements SINAMICS. Dans le cas de SIMOTION D, les fonctions de Motion Control de SIMOTION et le logiciel d'entraînement de SINAMICS sont exécutés sur un matériel de régulation de type SINAMICS. Les appareils SIMOTION D présentent les caractéristiques suivantes :
● les fonctions de Motion Control et de commande sont directement intégrées dans l'entraînement
● Les appareils conviennent pour les concepts de machines modulaires avec couplage isochrone rapide.
Dans le cas de SIMOTION D, les fonctions SINAMICS du module de régulation du système d'entraînement multiaxe SINAMICS S120 sont intégrées (SINAMICS Integrated).
Vous trouverez dans l'aide en ligne une brève introduction à SIMOTION D à l'appui de l'exemple de la Control Unit D435. Dans la barre de menus SIMOTION SCOUT, cliquez sur Aide > Didacticiels > SIMOTION Drive‑Based.
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 33
5.3 Créer un appareil SIMOTION
5.3.1 EtapesLa création d'un nouvel appareil SIMOTION dans le projet se compose de trois étapes. SIMOTION SCOUT réunit les étapes de travail en une opération cohérente :
1. Créer l'appareil SIMOTION.
2. Configurer l'interface PROFINET de l'appareil.Le projet d'exemple ne comporte pas cette étape. PROFINET n'est pas utilisé. SIMOTION SCOUT ouvre toutefois la boîte de dialogue de configuration, dans le cas où la variante d'appareil D4x5‑2 DP/PN qui prend en charge PROFINET est implantée dans votre système d'apprentissage.
3. Configurer la communication entre la PG/le PC et l'appareil SIMOTION.
Le nouvel appareil SIMOTION créé apparaît dans l'arborescence du projet.
Créer un appareil SIMOTION et configurer la communication en ligne5.3 Créer un appareil SIMOTION
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-234 Mise en route, 04/2014
5.3.2 Créer un appareil SIMOTION
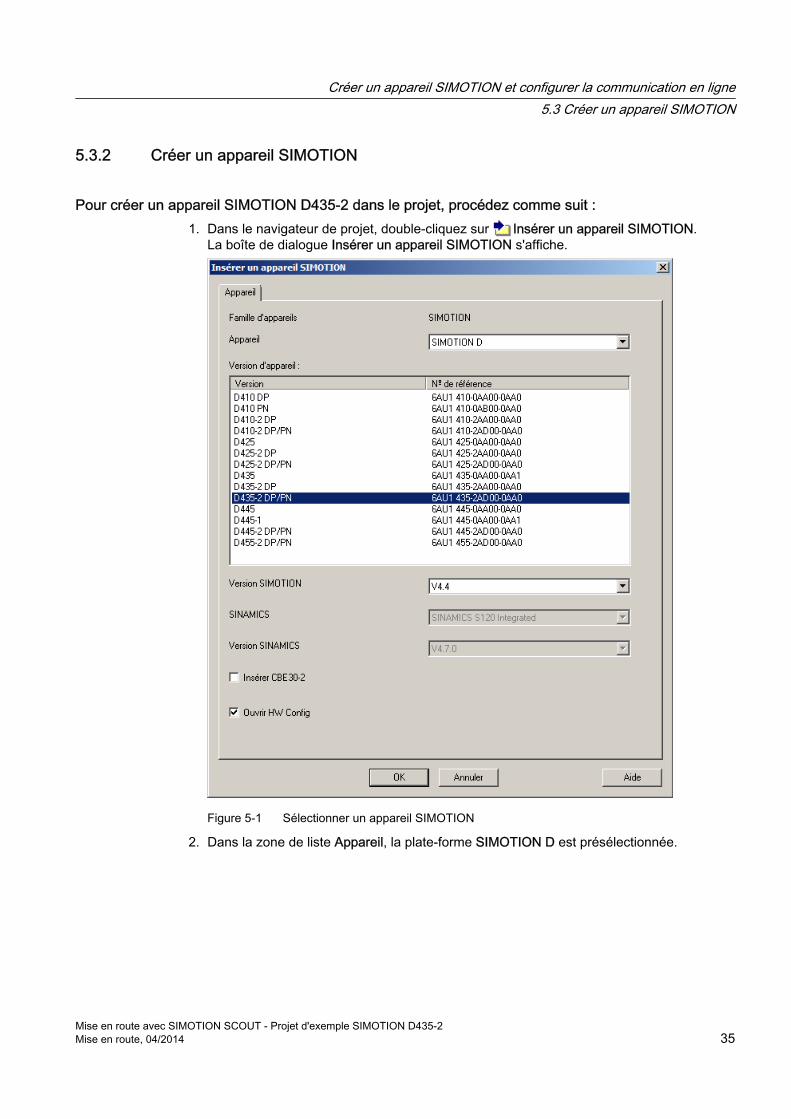
Pour créer un appareil SIMOTION D435-2 dans le projet, procédez comme suit :1. Dans le navigateur de projet, double-cliquez sur Insérer un appareil SIMOTION.
La boîte de dialogue Insérer un appareil SIMOTION s'affiche.
Figure 5-1 Sélectionner un appareil SIMOTION
2. Dans la zone de liste Appareil, la plate-forme SIMOTION D est présélectionnée.
Créer un appareil SIMOTION et configurer la communication en ligne5.3 Créer un appareil SIMOTION
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 35
3. Dans la liste Version d'appareil, sélectionnez l'appareil SIMOTION D435-2 DP/PN et sous Version SIMOTION, la version du firmware de l'appareil utilisé.
Remarque
La variante d'appareil configurée doit correspondre à la version du firmware de la carte mémoire de l'appareil SIMOTION. Dans le cas contraire, un message d'erreur sera émis lors du passage en ligne de l'appareil.
4. La case à cocher Ouvrir HW Config permet de définir si vous voulez ouvrir la fenêtre de configuration du matériel HW Config au terme de la création du nouvel appareil.Laissez la case à cocher activée.
5. Confirmez la création en cliquant sur OK.La boîte de dialogue Insérer un appareil SIMOTION se ferme. SIMOTION SCOUT passe à l'étape de travail suivante Configuration de l'interface PROFINET (Page 36).
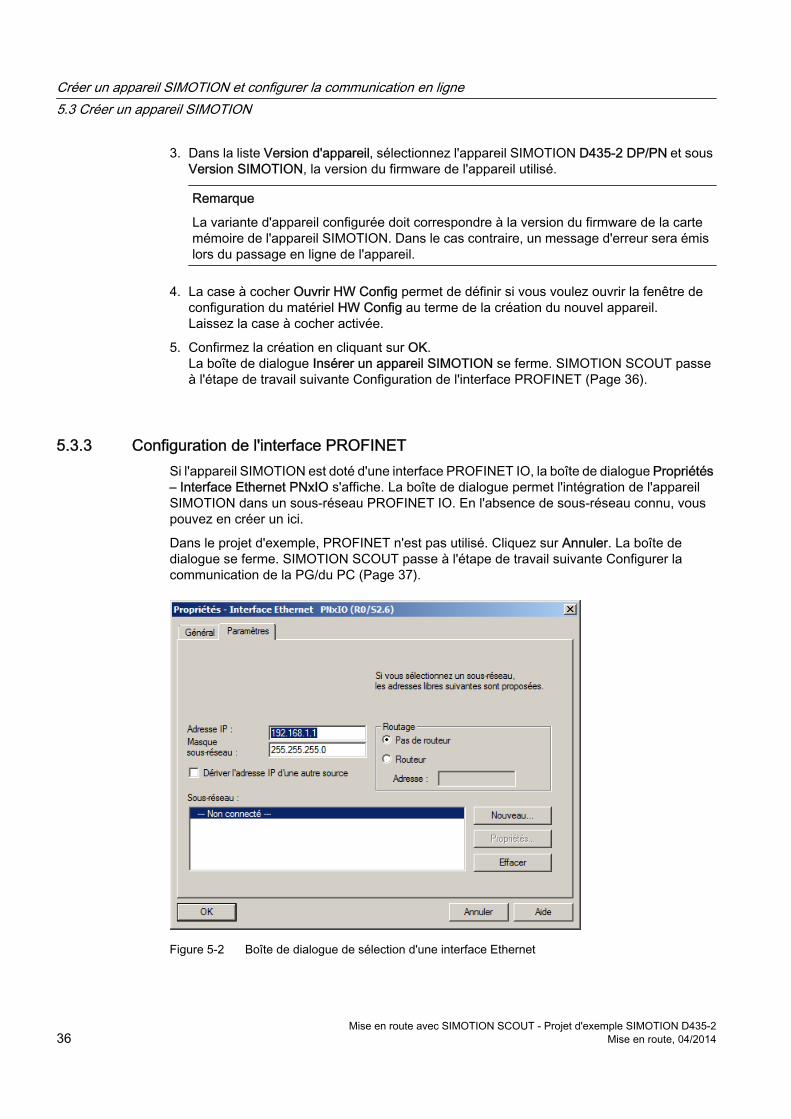
5.3.3 Configuration de l'interface PROFINETSi l'appareil SIMOTION est doté d'une interface PROFINET IO, la boîte de dialogue Propriétés – Interface Ethernet PNxIO s'affiche. La boîte de dialogue permet l'intégration de l'appareil SIMOTION dans un sous-réseau PROFINET IO. En l'absence de sous-réseau connu, vous pouvez en créer un ici.
Dans le projet d'exemple, PROFINET n'est pas utilisé. Cliquez sur Annuler. La boîte de dialogue se ferme. SIMOTION SCOUT passe à l'étape de travail suivante Configurer la communication de la PG/du PC (Page 37).
Figure 5-2 Boîte de dialogue de sélection d'une interface Ethernet
Créer un appareil SIMOTION et configurer la communication en ligne5.3 Créer un appareil SIMOTION
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-236 Mise en route, 04/2014
5.3.4 Configurer la communication de la PG/du PC
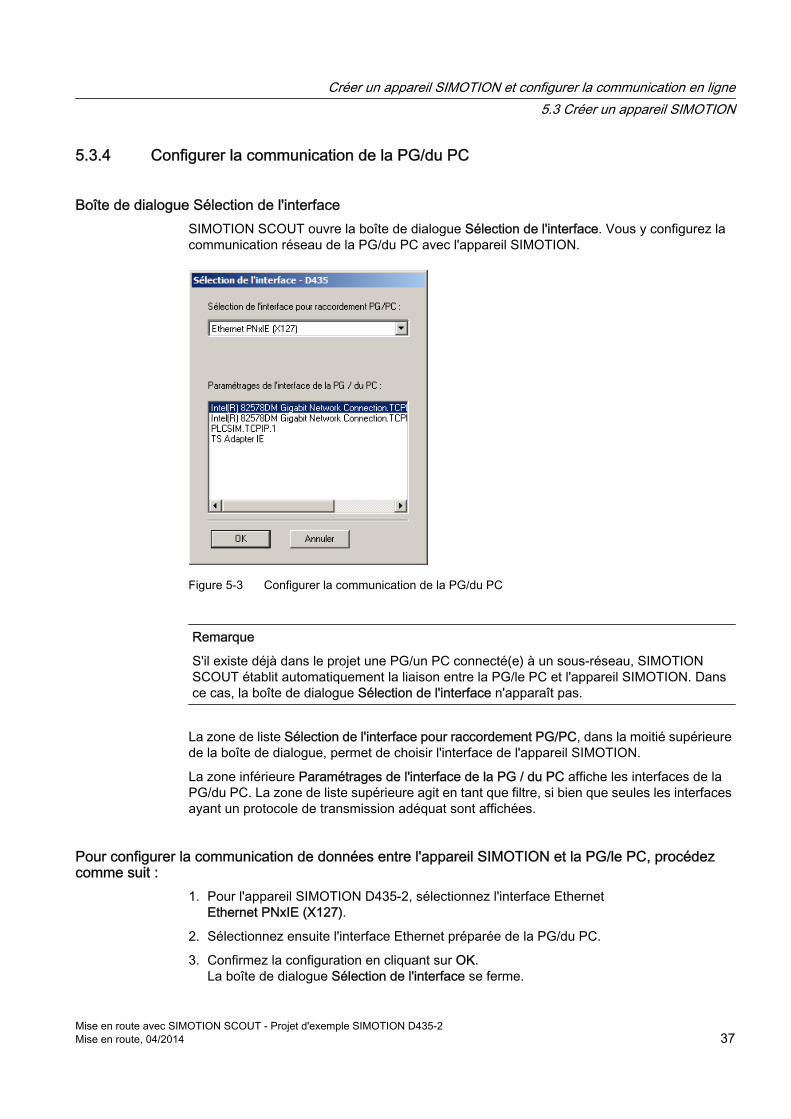
Boîte de dialogue Sélection de l'interfaceSIMOTION SCOUT ouvre la boîte de dialogue Sélection de l'interface. Vous y configurez la communication réseau de la PG/du PC avec l'appareil SIMOTION.
Figure 5-3 Configurer la communication de la PG/du PC
Remarque
S'il existe déjà dans le projet une PG/un PC connecté(e) à un sous-réseau, SIMOTION SCOUT établit automatiquement la liaison entre la PG/le PC et l'appareil SIMOTION. Dans ce cas, la boîte de dialogue Sélection de l'interface n'apparaît pas.
La zone de liste Sélection de l'interface pour raccordement PG/PC, dans la moitié supérieure de la boîte de dialogue, permet de choisir l'interface de l'appareil SIMOTION.
La zone inférieure Paramétrages de l'interface de la PG / du PC affiche les interfaces de la PG/du PC. La zone de liste supérieure agit en tant que filtre, si bien que seules les interfaces ayant un protocole de transmission adéquat sont affichées.
Pour configurer la communication de données entre l'appareil SIMOTION et la PG/le PC, procédez comme suit :
1. Pour l'appareil SIMOTION D435-2, sélectionnez l'interface Ethernet Ethernet PNxIE (X127).
2. Sélectionnez ensuite l'interface Ethernet préparée de la PG/du PC.
3. Confirmez la configuration en cliquant sur OK.La boîte de dialogue Sélection de l'interface se ferme.
Créer un appareil SIMOTION et configurer la communication en ligne5.3 Créer un appareil SIMOTION
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 37
5.4 Résultat dans le projet d'exemple
Nouvel appareil SIMOTION crééLa configuration de l'appareil SIMOTION et de la communication réseau de la PG/du PC avec l'appareil SIMOTION est terminée.
● Le nouvel appareil SIMOTION D435‑2 créé apparaît dans l'arborescence du projet du Workbench.
● La PG/le PC est relié(e) à l'appareil SIMOTION via Ethernet.
● SIMOTION SCOUT ouvre automatiquement la fenêtre HW Config et vous amène ainsi dans la configuration matérielle.
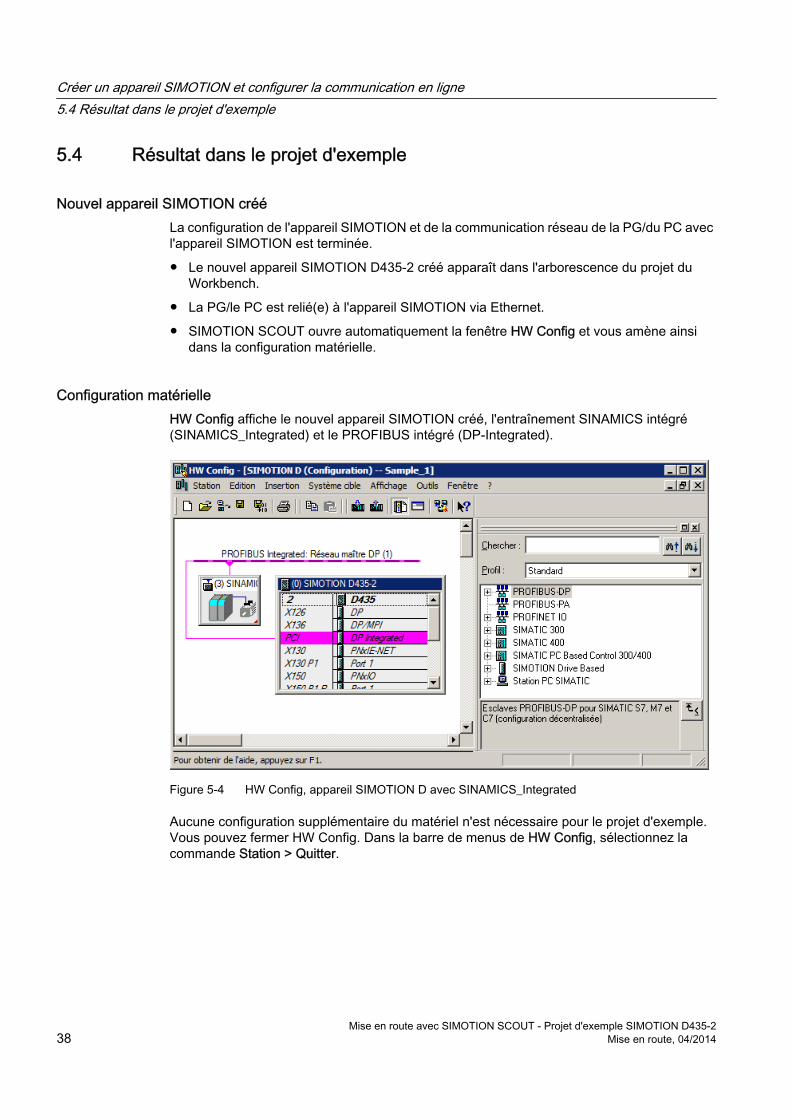
Configuration matérielleHW Config affiche le nouvel appareil SIMOTION créé, l'entraînement SINAMICS intégré (SINAMICS_Integrated) et le PROFIBUS intégré (DP-Integrated).
Figure 5-4 HW Config, appareil SIMOTION D avec SINAMICS_Integrated
Aucune configuration supplémentaire du matériel n'est nécessaire pour le projet d'exemple. Vous pouvez fermer HW Config. Dans la barre de menus de HW Config, sélectionnez la commande Station > Quitter.
Créer un appareil SIMOTION et configurer la communication en ligne5.4 Résultat dans le projet d'exemple
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-238 Mise en route, 04/2014
Charger le projet dans le système cible 66.1 Vue d'ensemble
But de la mise en routeAu cours de cette étape de configuration, vous créez les conditions nécessaires pour la configuration de l'entraînement.
● Vous sauvegardez le projet d'exemple créé jusqu'à présent sur le disque dur.
● Vous compilez le projet en code exécutable.
● Vous établissez la communication en ligne avec l'appareil SIMOTION.
● Vous chargez le projet de la PG/du PC sur l'appareil SIMOTION.
6.2 Enregistrer et compiler le projetAfin de pouvoir charger un projet créé dans SIMOTION SCOUT dans le système cible, celui-ci doit être enregistré et compilé en code exécutable.
La commande Enregistrer le projet et compiler les modifications combine les deux étapes. Le projet est sauvegardé sur le disque dur. SIMOTION SCOUT recherche les éventuelles modifications dans l'ensemble du projet et ne compile que ces modifications.
Remarque
Pour le travail quotidien, favorisez l'utilisation de la commande Enregistrer le projet et compiler les modifications.
Plusieurs variantes de la commande "Enregistrer" sont proposées sous le titre de menu Projet. Vous trouverez des informations à ce sujet dans l'aide en ligne, sous Enregistrement et compilation.
Pour enregistrer et compiler un projet, procédez comme suit :Sélectionnez la commande de menu Projet > Enregistrer et compiler les modifications ou cliquez sur le bouton correspondant de la barre d'outils.
SIMOTION SCOUT affiche des barres de progression pour l'affectation symbolique et la compilation.
Le déroulement de la compilation est journalisé dans la vue de détail du Workbench. Les informations, alarmes et erreurs de compilation y sont affichées dans le texte en clair.
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 39
Activer la vue de détailLa vue de détail est éventuellement désactivée. Cliquez sur la commande de menu Affichage > Vue de détail pour activer la vue.
6.3 Connecter aux appareils cibles sélectionnés – Passer en lignePour charger des données de projet de SIMOTION SCOUT sur le matériel ou, à l'inverse, appliquer des données machine du matériel au projet SIMOTION SCOUT, la communication doit être activée entre la PG/le PC et l'appareil SIMOTION.
L'état de la communication réseau s'affiche dans le pied de page du Workbench :
La communication réseau est activée. L'échange de données est possible.La connexion réseau est coupée.
Charger le projet dans le système cible6.3 Connecter aux appareils cibles sélectionnés – Passer en ligne
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-240 Mise en route, 04/2014
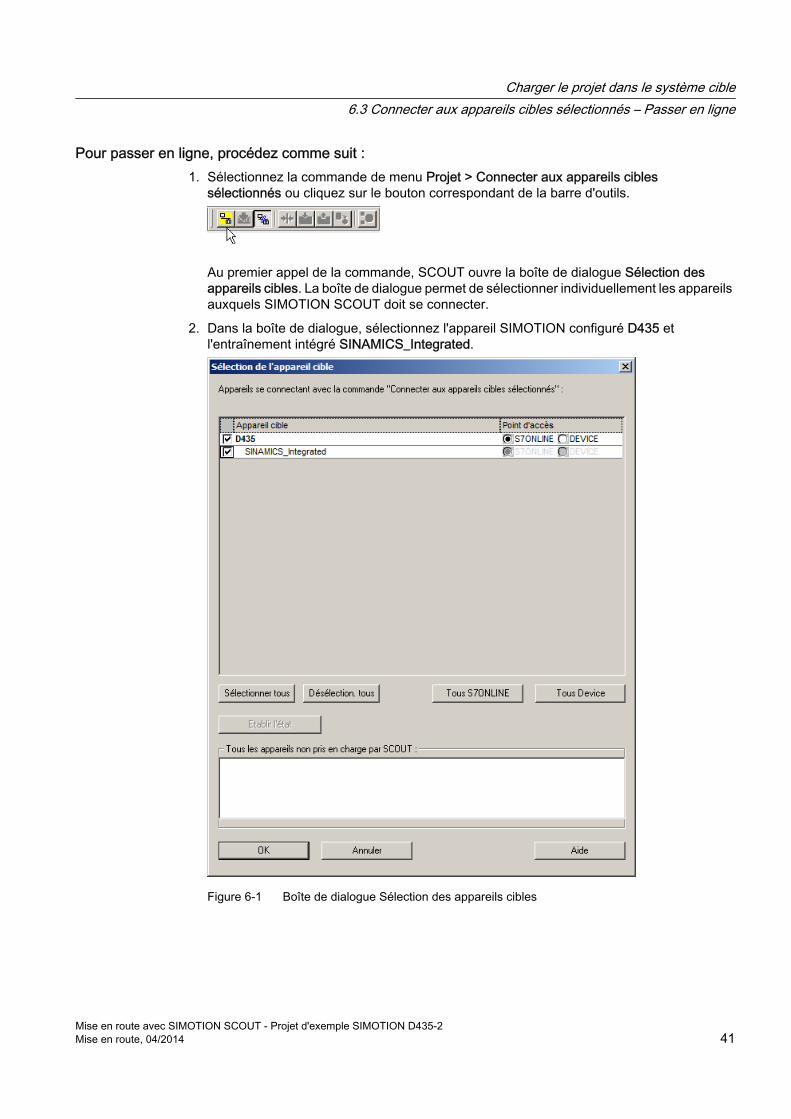
Pour passer en ligne, procédez comme suit :1. Sélectionnez la commande de menu Projet > Connecter aux appareils cibles
sélectionnés ou cliquez sur le bouton correspondant de la barre d'outils.
Au premier appel de la commande, SCOUT ouvre la boîte de dialogue Sélection des appareils cibles. La boîte de dialogue permet de sélectionner individuellement les appareils auxquels SIMOTION SCOUT doit se connecter.
2. Dans la boîte de dialogue, sélectionnez l'appareil SIMOTION configuré D435 et l'entraînement intégré SINAMICS_Integrated.
Figure 6-1 Boîte de dialogue Sélection des appareils cibles
Charger le projet dans le système cible6.3 Connecter aux appareils cibles sélectionnés – Passer en ligne
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 41
3. Cliquez sur OK.SIMOTION SCOUT établit la connexion en ligne.
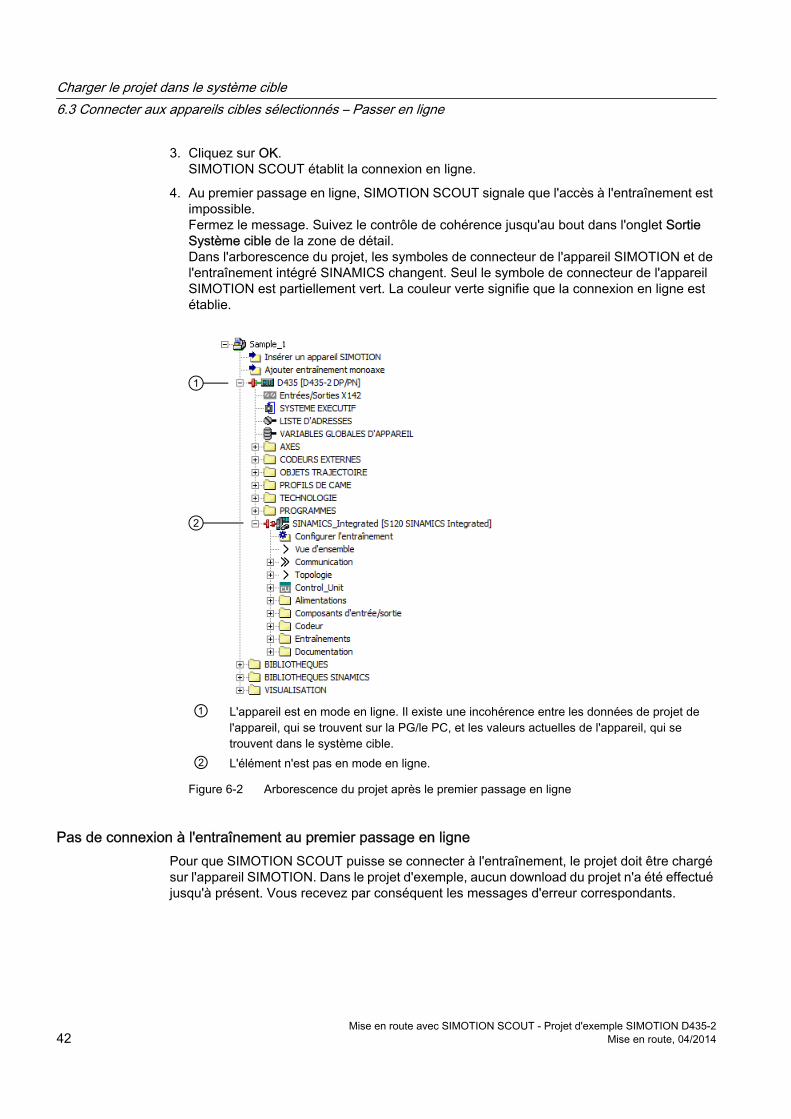
4. Au premier passage en ligne, SIMOTION SCOUT signale que l'accès à l'entraînement est impossible.Fermez le message. Suivez le contrôle de cohérence jusqu'au bout dans l'onglet Sortie Système cible de la zone de détail.Dans l'arborescence du projet, les symboles de connecteur de l'appareil SIMOTION et de l'entraînement intégré SINAMICS changent. Seul le symbole de connecteur de l'appareil SIMOTION est partiellement vert. La couleur verte signifie que la connexion en ligne est établie.
① L'appareil est en mode en ligne. Il existe une incohérence entre les données de projet de l'appareil, qui se trouvent sur la PG/le PC, et les valeurs actuelles de l'appareil, qui se trouvent dans le système cible.
② L'élément n'est pas en mode en ligne.
Figure 6-2 Arborescence du projet après le premier passage en ligne
Pas de connexion à l'entraînement au premier passage en lignePour que SIMOTION SCOUT puisse se connecter à l'entraînement, le projet doit être chargé sur l'appareil SIMOTION. Dans le projet d'exemple, aucun download du projet n'a été effectué jusqu'à présent. Vous recevez par conséquent les messages d'erreur correspondants.
Charger le projet dans le système cible6.3 Connecter aux appareils cibles sélectionnés – Passer en ligne
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-242 Mise en route, 04/2014

6.4 Charger le projet dans le système cibleLe download complet du projet est uniquement possible en mode de fonctionnement STOP. Le cas échéant, SIMOTION SCOUT propose de changer de mode de fonctionnement pendant la procédure de download.
Charger le projet dans le système cible6.4 Charger le projet dans le système cible
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 43
Pour le download du projet, procédez comme suit :1. Sélectionnez la commande de menu Projet > Charger dans le système cible ou cliquez sur
le bouton Charger dans le système cible de la barre d'outils.
La boîte de dialogue Charger dans le système cible s'affiche.
2. Cochez la case Copier la RAM vers la ROM après le chargement. La RAM de l'appareil SIMOTION est enregistrée sur la carte mémoire (mémoire ROM) de l'appareil SIMOTION. La configuration est ainsi conservée en cas de mise hors tension et remise sous tension.
3. Lancez le chargement en cliquant sur Oui.Les données du projet ainsi que la configuration matérielle sont chargées dans la mémoire RAM du système cible. Si un message demandant la confirmation de la commutation sur STOP de la CPU s'affiche, confirmez avec Oui.SIMOTION SCOUT effectue une multitude de contrôles qui sont journalisés dans l'onglet Sortie Système cible de la zone de détail. Vous y trouvez l'entrée finale Chargement dans le système cible terminé.
Remarque
Lors du premier download dans le système cible, les données du package technologique sont également chargées. Cette opération peut durer quelques minutes.
Remarque
La mise à niveau ou la mise à niveau inférieur du firmware des composants a lieu automatiquement en fonction de la version du firmware de la carte CF et de celle du firmware des composants SINAMICS (composants DRIVE-CLiQ tels que Line Module, Motor Modules, Terminal Modules, …).
La procédure de mise à jour peut durer quelques minutes et est signalée par des messages correspondants dans la fenêtre d'affichage de SIMOTION SCOUT.
La mise à jour du firmware des composants DRIVE-CLiQ est signalée par le clignotement rouge/vert de la LED RDY. ● Mise à jour du firmware en cours : la LED RDY clignote lentement (0,5 Hz). ● Mise à jour du firmware terminée : la LED RDY clignote rapidement (2 Hz). Un
POWER ON est nécessaire.
Ce clignotement apparaît également sur la LED RDY jaune de la SIMOTION D et signale qu'une mise à jour du firmware est en cours sur les composants raccordés à la SIMOTION D ou que la mise à jour du firmware de tous les composants est terminée.
Les composants sur lesquels un POWER ON est nécessaire après la mise à jour le signalent par le clignotement rapide de la LED RDY. Passez hors ligne avec SIMOTION SCOUT et procédez à la désactivation/activation (POWER ON) de l'alimentation 24 V des composants correspondants pour effectuer la réinitialisation.
Charger le projet dans le système cible6.4 Charger le projet dans le système cible
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-244 Mise en route, 04/2014
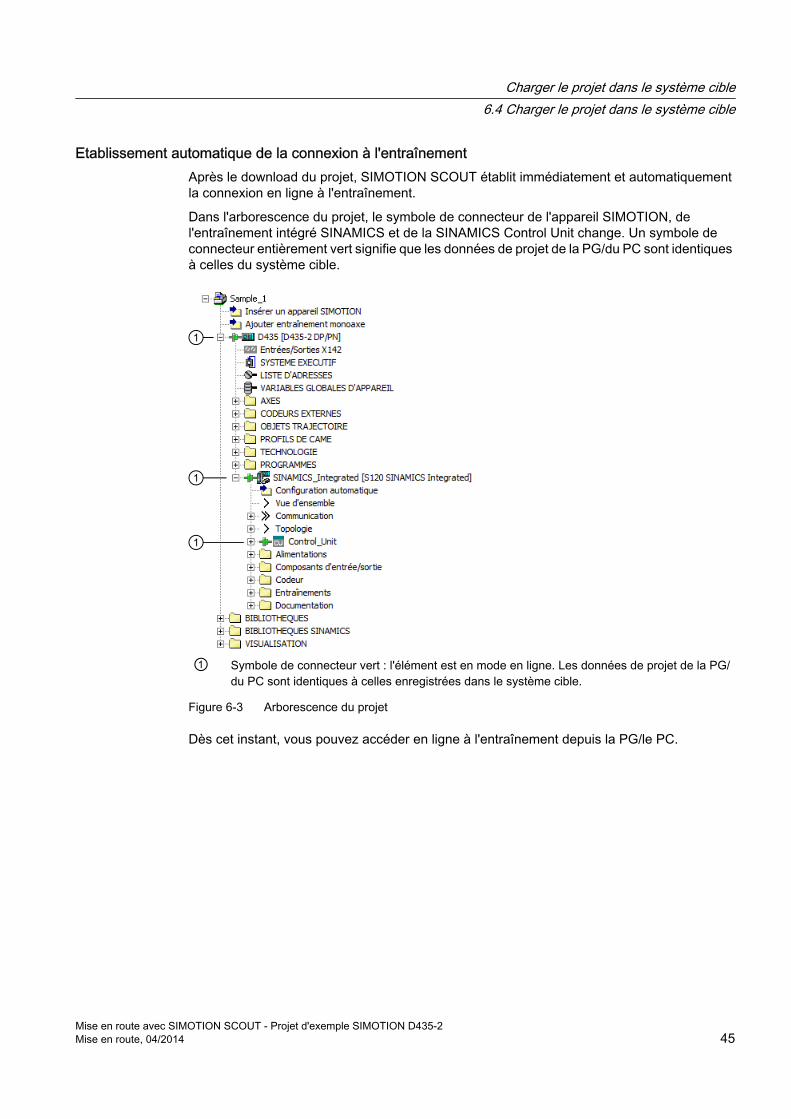
Etablissement automatique de la connexion à l'entraînementAprès le download du projet, SIMOTION SCOUT établit immédiatement et automatiquement la connexion en ligne à l'entraînement.
Dans l'arborescence du projet, le symbole de connecteur de l'appareil SIMOTION, de l'entraînement intégré SINAMICS et de la SINAMICS Control Unit change. Un symbole de connecteur entièrement vert signifie que les données de projet de la PG/du PC sont identiques à celles du système cible.
① Symbole de connecteur vert : l'élément est en mode en ligne. Les données de projet de la PG/du PC sont identiques à celles enregistrées dans le système cible.
Figure 6-3 Arborescence du projet
Dès cet instant, vous pouvez accéder en ligne à l'entraînement depuis la PG/le PC.
Charger le projet dans le système cible6.4 Charger le projet dans le système cible
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 45

Configurer l'entraînement 77.1 Vue d'ensemble
But de la mise en routeDans ce chapitre de la mise en route, vous configurez l'entraînement intégré de l'appareil SIMOTION D435-2. Pour cela, vous utilisez la configuration automatique.
Prérequis● Vous avez chargé le projet d'exemple dans le système cible (voir chapitre Charger le projet
dans le système cible (Page 39)).
● SIMOTION SCOUT est connecté en ligne à l'appareil SIMOTION et à l'entraînement intégré (symboles de connecteur verts).
● Les composants de l'entraînement SINAMICS (alimentation, partie puissance, moteur et codeur) sont reliés à la SIMOTION Control Unit par une connexion DRIVE-CLiQ. Ce prérequis indispensable à la configuration automatique a été mentionné au début de la mise en route (voir chapitre Prérequis (Page 21)).
7.2 EntraînementLa régulation de vitesse et de courant de la commande du moteur est réalisée dans l'entraînement.
7.3 Configuration automatique de l'entraînementSIMOTION SCOUT peut lire en ligne les plaques signalétiques électroniques des composants d'entraînement SINAMICS via l'interface DRIVE‑CLiQ et effectuer automatiquement la configuration de l'entraînement à partir de ces données. Aucune saisie manuelle des données n'est nécessaire. La configuration d'exemple d'un appareil SIMOTION D435‑2, qui est présentée ici, suppose un câblage DRIVE‑CLiQ complet.
Outre la configuration automatique de l'entraînement, vous pouvez configurer un appareil D4x5-2 hors ligne. La configuration hors ligne est présentée dans la version Aide en ligne de la mise en route pour SIMOTION C et SIMOTION P.
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 47
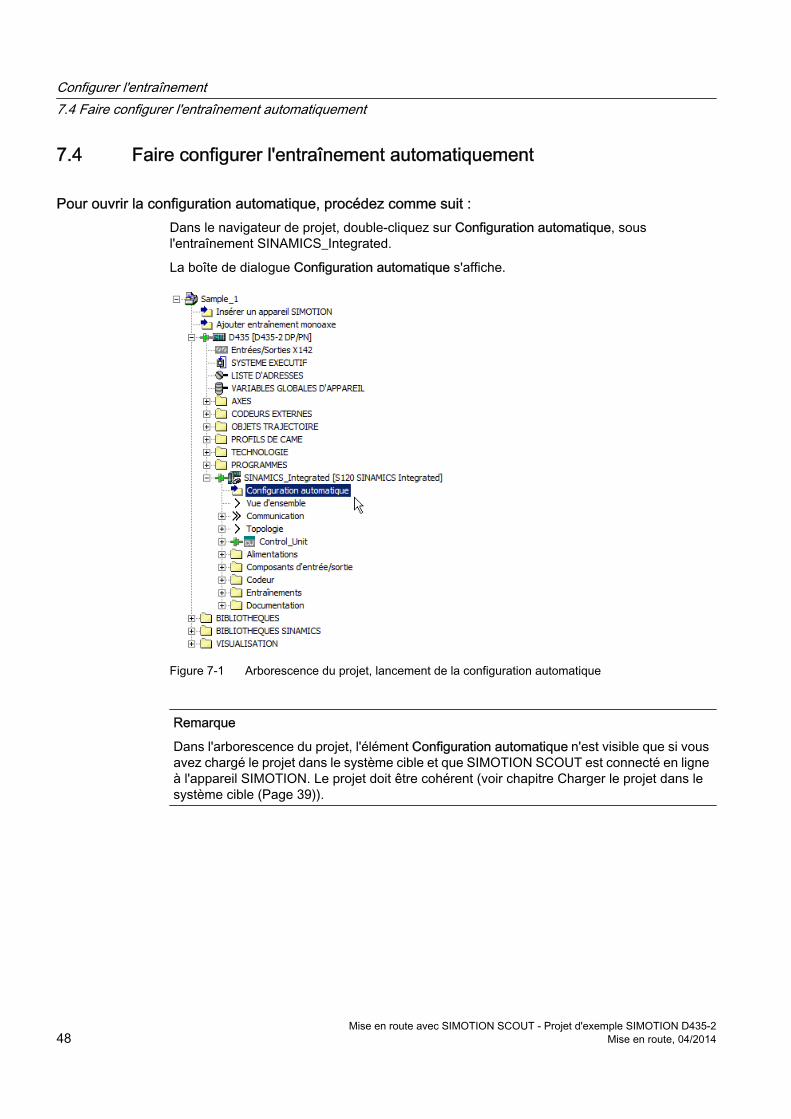
7.4 Faire configurer l'entraînement automatiquement
Pour ouvrir la configuration automatique, procédez comme suit :Dans le navigateur de projet, double-cliquez sur Configuration automatique, sous l'entraînement SINAMICS_Integrated.
La boîte de dialogue Configuration automatique s'affiche.
Figure 7-1 Arborescence du projet, lancement de la configuration automatique
Remarque
Dans l'arborescence du projet, l'élément Configuration automatique n'est visible que si vous avez chargé le projet dans le système cible et que SIMOTION SCOUT est connecté en ligne à l'appareil SIMOTION. Le projet doit être cohérent (voir chapitre Charger le projet dans le système cible (Page 39)).
Configurer l'entraînement7.4 Faire configurer l'entraînement automatiquement
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-248 Mise en route, 04/2014
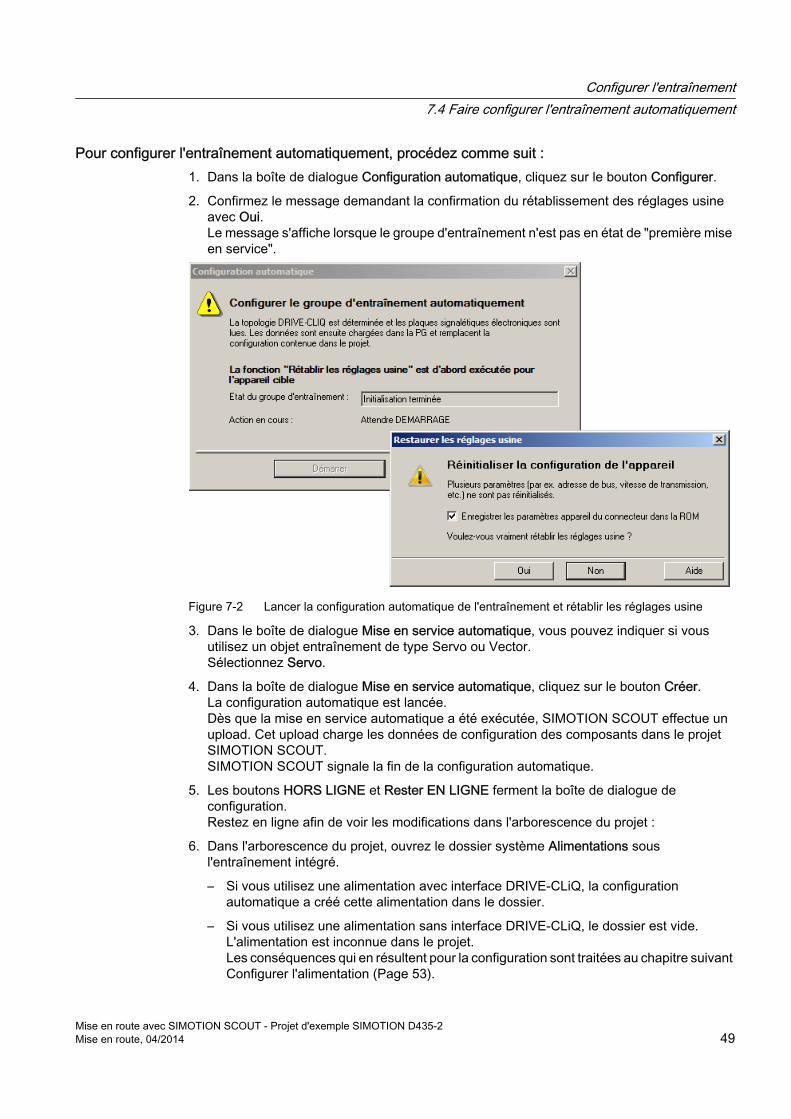
Pour configurer l'entraînement automatiquement, procédez comme suit :1. Dans la boîte de dialogue Configuration automatique, cliquez sur le bouton Configurer.
2. Confirmez le message demandant la confirmation du rétablissement des réglages usine avec Oui.Le message s'affiche lorsque le groupe d'entraînement n'est pas en état de "première mise en service".
Figure 7-2 Lancer la configuration automatique de l'entraînement et rétablir les réglages usine
3. Dans le boîte de dialogue Mise en service automatique, vous pouvez indiquer si vous utilisez un objet entraînement de type Servo ou Vector.Sélectionnez Servo.
4. Dans la boîte de dialogue Mise en service automatique, cliquez sur le bouton Créer.La configuration automatique est lancée.Dès que la mise en service automatique a été exécutée, SIMOTION SCOUT effectue un upload. Cet upload charge les données de configuration des composants dans le projet SIMOTION SCOUT.SIMOTION SCOUT signale la fin de la configuration automatique.
5. Les boutons HORS LIGNE et Rester EN LIGNE ferment la boîte de dialogue de configuration. Restez en ligne afin de voir les modifications dans l'arborescence du projet :
6. Dans l'arborescence du projet, ouvrez le dossier système Alimentations sous l'entraînement intégré.
– Si vous utilisez une alimentation avec interface DRIVE-CLiQ, la configuration automatique a créé cette alimentation dans le dossier.
– Si vous utilisez une alimentation sans interface DRIVE-CLiQ, le dossier est vide. L'alimentation est inconnue dans le projet.Les conséquences qui en résultent pour la configuration sont traitées au chapitre suivant Configurer l'alimentation (Page 53).
Configurer l'entraînement7.4 Faire configurer l'entraînement automatiquement
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 49
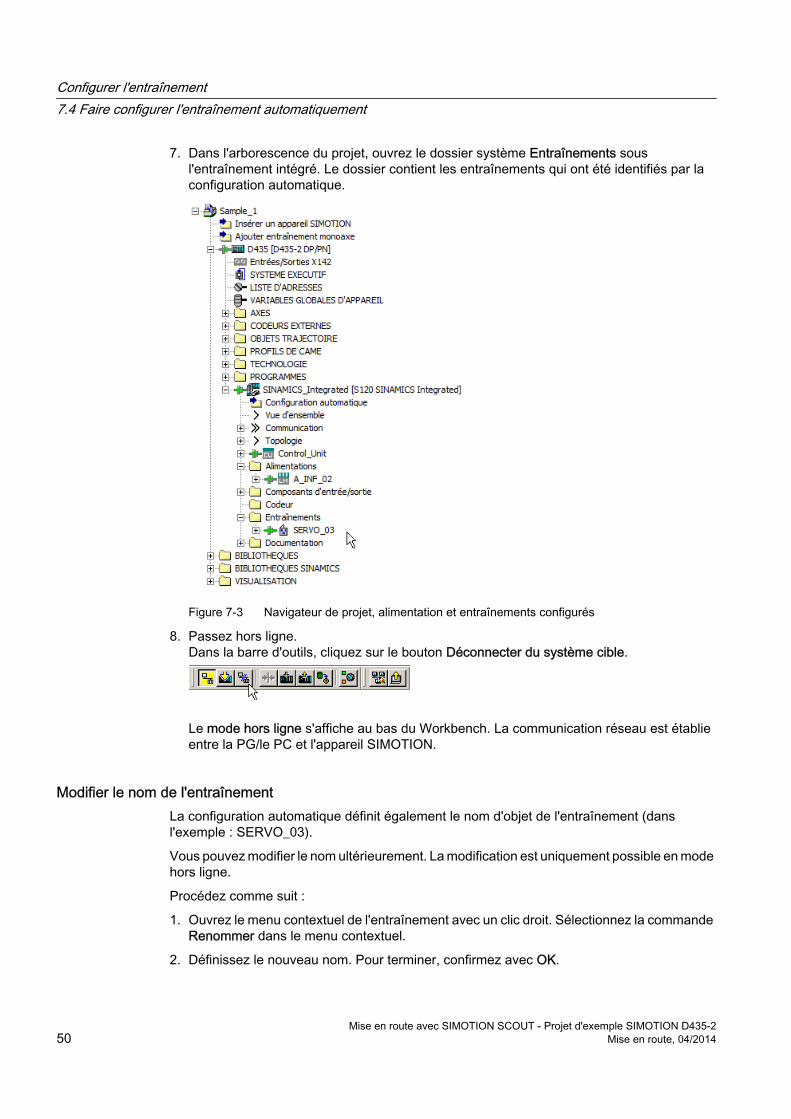
7. Dans l'arborescence du projet, ouvrez le dossier système Entraînements sous l'entraînement intégré. Le dossier contient les entraînements qui ont été identifiés par la configuration automatique.
Figure 7-3 Navigateur de projet, alimentation et entraînements configurés
8. Passez hors ligne.Dans la barre d'outils, cliquez sur le bouton Déconnecter du système cible.
Le mode hors ligne s'affiche au bas du Workbench. La communication réseau est établie entre la PG/le PC et l'appareil SIMOTION.
Modifier le nom de l'entraînementLa configuration automatique définit également le nom d'objet de l'entraînement (dans l'exemple : SERVO_03).
Vous pouvez modifier le nom ultérieurement. La modification est uniquement possible en mode hors ligne.
Procédez comme suit :
1. Ouvrez le menu contextuel de l'entraînement avec un clic droit. Sélectionnez la commande Renommer dans le menu contextuel.
2. Définissez le nouveau nom. Pour terminer, confirmez avec OK.
Configurer l'entraînement7.4 Faire configurer l'entraînement automatiquement
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-250 Mise en route, 04/2014
Comme pour toutes les modifications que vous effectuez hors ligne dans le projet, le projet devient incohérent après la modification du nom. Pour rétablir la cohérence du "projet de la PG/du PC" et du "projet de l'appareil SIMOTION", un nouveau download du projet est nécessaire. La marche à suivre est décrite au chapitre Charger le projet dans le système cible (Page 39).
7.5 Résultat dans le projet d'exempleSi vous utilisez une alimentation avec interface DRIVE-CLiQ, l'entraînement est prêt à fonctionner. Il peut être connecté à un axe.
Configurer l'entraînement7.5 Résultat dans le projet d'exemple
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 51

Configurer l'alimentation 88.1 Vue d'ensemble
But de la mise en routeDans ce chapitre de la mise en route, vous configurez l'alimentation.
La SINAMICS Control Unit intégrée démarre l'entraînement uniquement lorsque l'alimentation est prête à fonctionner. Dans le projet, l'interface via laquelle l'entraînement reçoit le signal "prêt à fonctionner" de l'alimentation doit être connue.
On distingue deux cas :
● Alimentation avec interface DRIVE‑CLiQSi une alimentation avec connexion DRIVE‑CLiQ a déjà été configurée, le signal "prêt à fonctionner" de l'alimentation (r0863.0) est automatiquement connecté au signal "Alimentation Fonctionnement, p0864" de l'entraînement au moment de l'insertion des entraînements (valable uniquement pour les entraînements connectés au même groupe d'entraînement que l'alimentation).Vous pouvez immédiatement passer à l'étape suivante de la configuration (voir chapitre Configurer un axe (Page 57)).
● Alimentation sans interface DRIVE‑CLiQSi vous utilisez une alimentation sans interface DRIVE-CLiQ, telle qu'un Smart Line Module, vous devez connecter le signal "prêt à fonctionner" de l'alimentation via des bornes. La marche à suivre est décrite au chapitre suivant.
Prérequis● Vous avez configuré l'entraînement intégré de l'appareil SIMOTION D435‑2 (voir chapitre
Configurer l'entraînement (Page 47)).
● SIMOTION SCOUT est en mode hors ligne.
8.2 Configurer une alimentation sans interface DRIVE‑CLiQUne alimentation sans interface DRIVE‑CLiQ émet le signal "prêt à fonctionner" (p0863.0) via une borne de sortie. Dans le projet, vous indiquez l'entrée (r0722) de la SINAMICS Control Unit intégrée, à laquelle le signal est connecté. L'entraînement alimenté par l'alimentation utilise le signal pour signaler l'état prêt (p0864).
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 53
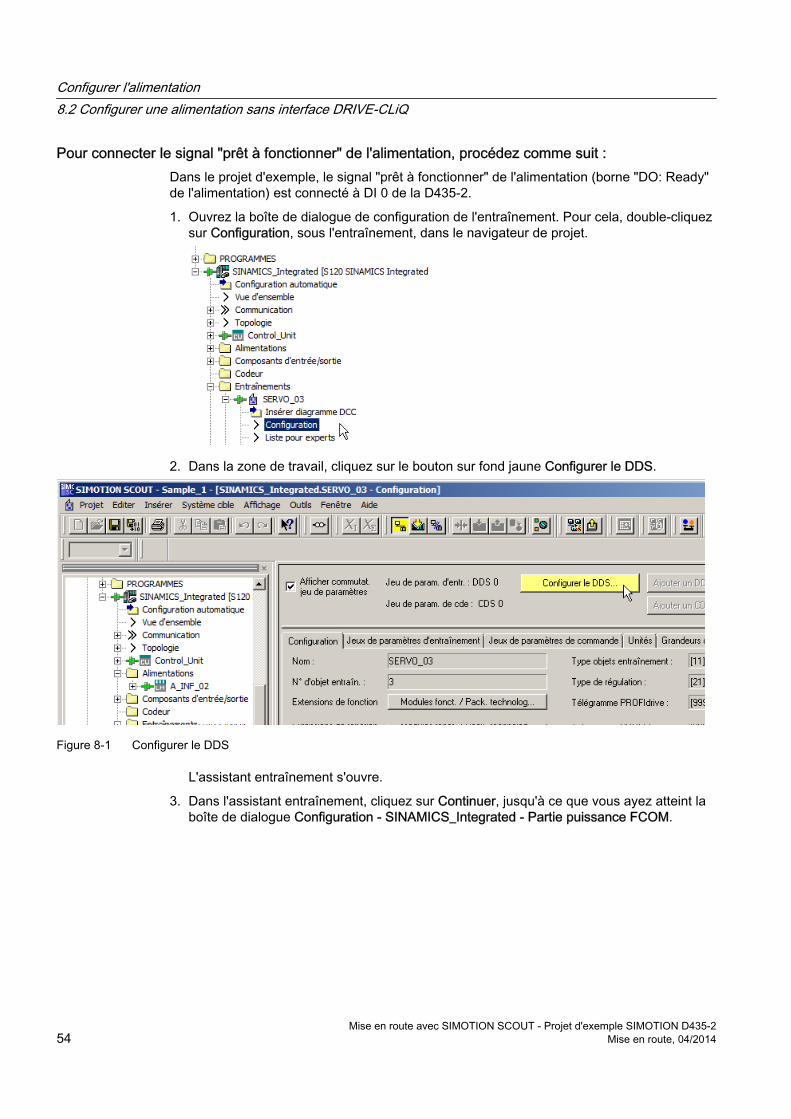
Pour connecter le signal "prêt à fonctionner" de l'alimentation, procédez comme suit :Dans le projet d'exemple, le signal "prêt à fonctionner" de l'alimentation (borne "DO: Ready" de l'alimentation) est connecté à DI 0 de la D435‑2.
1. Ouvrez la boîte de dialogue de configuration de l'entraînement. Pour cela, double-cliquez sur Configuration, sous l'entraînement, dans le navigateur de projet.
2. Dans la zone de travail, cliquez sur le bouton sur fond jaune Configurer le DDS.
Figure 8-1 Configurer le DDS
L'assistant entraînement s'ouvre.
3. Dans l'assistant entraînement, cliquez sur Continuer, jusqu'à ce que vous ayez atteint la boîte de dialogue Configuration - SINAMICS_Integrated - Partie puissance FCOM.
Configurer l'alimentation8.2 Configurer une alimentation sans interface DRIVE‑CLiQ
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-254 Mise en route, 04/2014
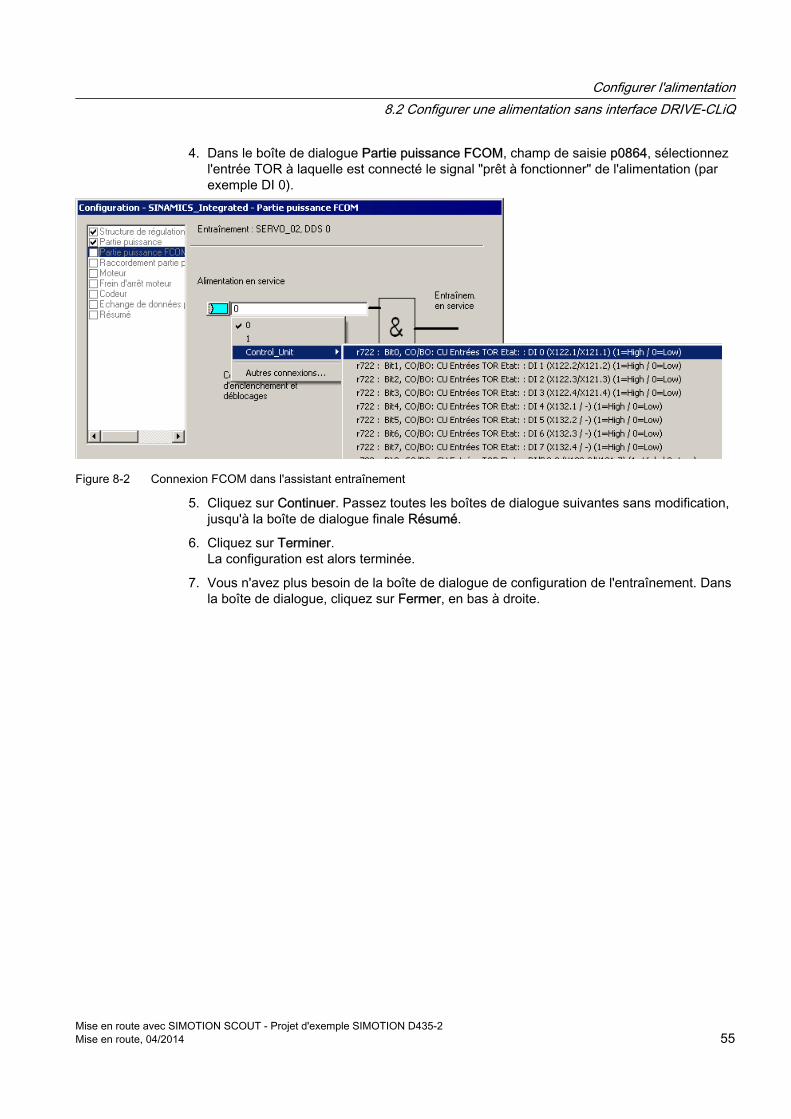
4. Dans le boîte de dialogue Partie puissance FCOM, champ de saisie p0864, sélectionnez l'entrée TOR à laquelle est connecté le signal "prêt à fonctionner" de l'alimentation (par exemple DI 0).
Figure 8-2 Connexion FCOM dans l'assistant entraînement
5. Cliquez sur Continuer. Passez toutes les boîtes de dialogue suivantes sans modification, jusqu'à la boîte de dialogue finale Résumé.
6. Cliquez sur Terminer.La configuration est alors terminée.
7. Vous n'avez plus besoin de la boîte de dialogue de configuration de l'entraînement. Dans la boîte de dialogue, cliquez sur Fermer, en bas à droite.
Configurer l'alimentation8.2 Configurer une alimentation sans interface DRIVE‑CLiQ
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 55

Configurer un axe 99.1 Vue d'ensemble
But de la mise en routeCe chapitre de la mise en route décrit comment créer et configurer un axe dans le projet et comment le connecter à l'entraînement intégré de l'appareil SIMOTION D. Pour cela, SIMOTION SCOUT met à disposition l'assistant axe.
PrérequisVous avez configuré l'entraînement intégré de l'appareil SIMOTION D (voir chapitre Configurer l'entraînement (Page 47)).
9.2 Objet technologique AxeLes objets technologiques représentent les objets réels correspondants (axe de positionnement, etc.) dans la commande.
L'objet technologique Axe fournit à l'utilisateur une vue technologique de l'entraînement et du codeur (actionneur et capteur), met à disposition des fonctions technologiques pour celle-ci et masque le couplage concret.
L'objet technologique Axe contient une multitude de fonctions telles que la communication avec l'entraînement, le traitement de la mesure, la régulation de position et la fonction de positionnement. Il exécute des ordres de commande et de mouvement et affiche des états et des mesures.
Les limitations technologiques et les valeurs relatives à la mécanique de l'axe et du codeur (pas de la broche, réducteur, etc.) sont réglées sur l'axe. Il est ensuite uniquement possible de travailler avec des grandeurs technologiques.
9.3 Assistant axe
Création de nouveaux axes dans le projetPour la création d'un nouvel axe, SIMOTION SCOUT met à disposition l'assistant axe. L'assistant demande les réglages de base et connecte le TO Axe à l'entraînement.
L'assistant ne peut être parcouru qu'une seule fois. Les modifications ultérieures de la configuration peuvent être réalisées dans les boîtes de dialogue correspondantes du TO.
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 57
9.4 Créer un axePour le projet d'exemple, vous créez l'axe Axis_2. Affectez à l'axe l'entraînement que vous avez configuré au chapitre Configurer l'entraînement (Page 47).
Parcourez l'assistant et confirmez tous les réglages par défaut en cliquant sur Continuer.
RemarqueAxis_2
Dans la version Aide en ligne de la mise en route, 2 axes sont créés : une axe virtuel Axis_1 et un axe réel Axis_2. L'axe réel est nommé ici Axis_2 dans un souci d'harmonisation des dénominations.
Vous trouverez la mise en route dans l'aide en ligne à la rubrique Mise en route de SIMOTION SCOUT.
Pour créer un axe réel dans le projet, procédez comme suit :1. Ouvrez le dossier AXES dans le navigateur de projet.
2. Double-cliquez sur Insérer axe. La boîte de dialogue Insérer axe s'affiche.
3. Définissez le nom de l'axe dans le champ Nom. Pour l'axe du projet d'exemple, utilisez la désignation Axis_2.
Configurer un axe9.4 Créer un axe
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-258 Mise en route, 04/2014
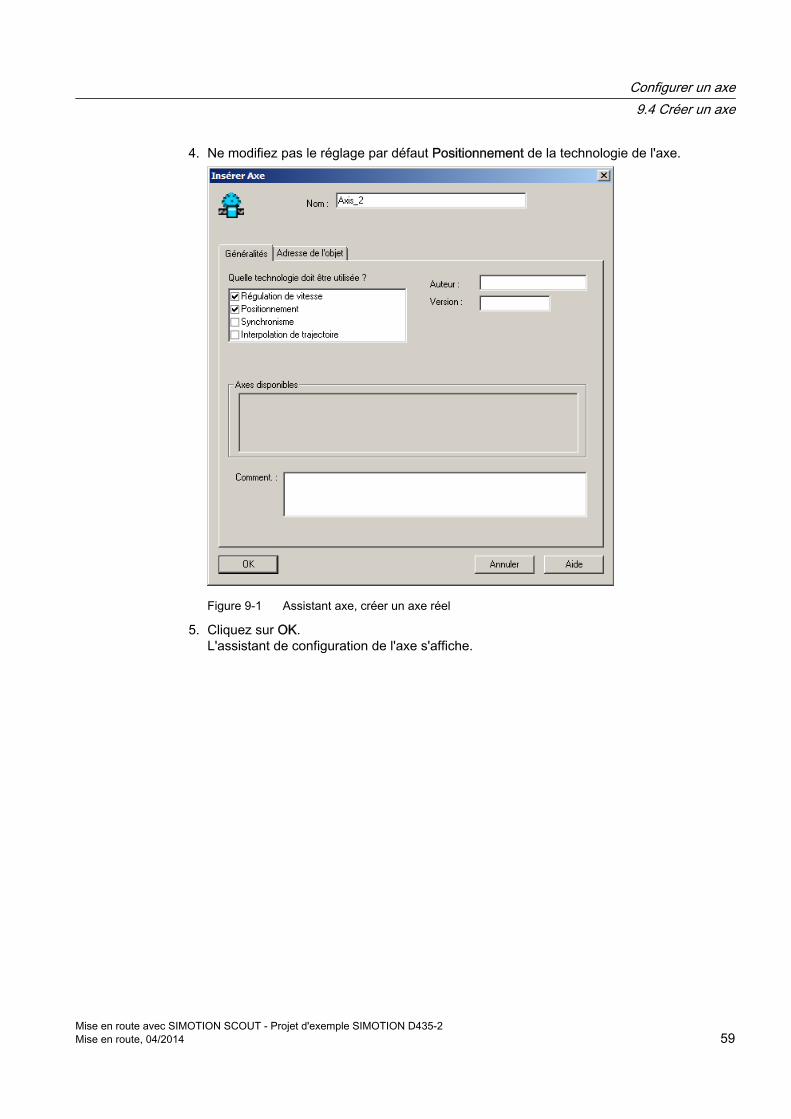
4. Ne modifiez pas le réglage par défaut Positionnement de la technologie de l'axe.
Figure 9-1 Assistant axe, créer un axe réel
5. Cliquez sur OK.L'assistant de configuration de l'axe s'affiche.
Configurer un axe9.4 Créer un axe
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 59
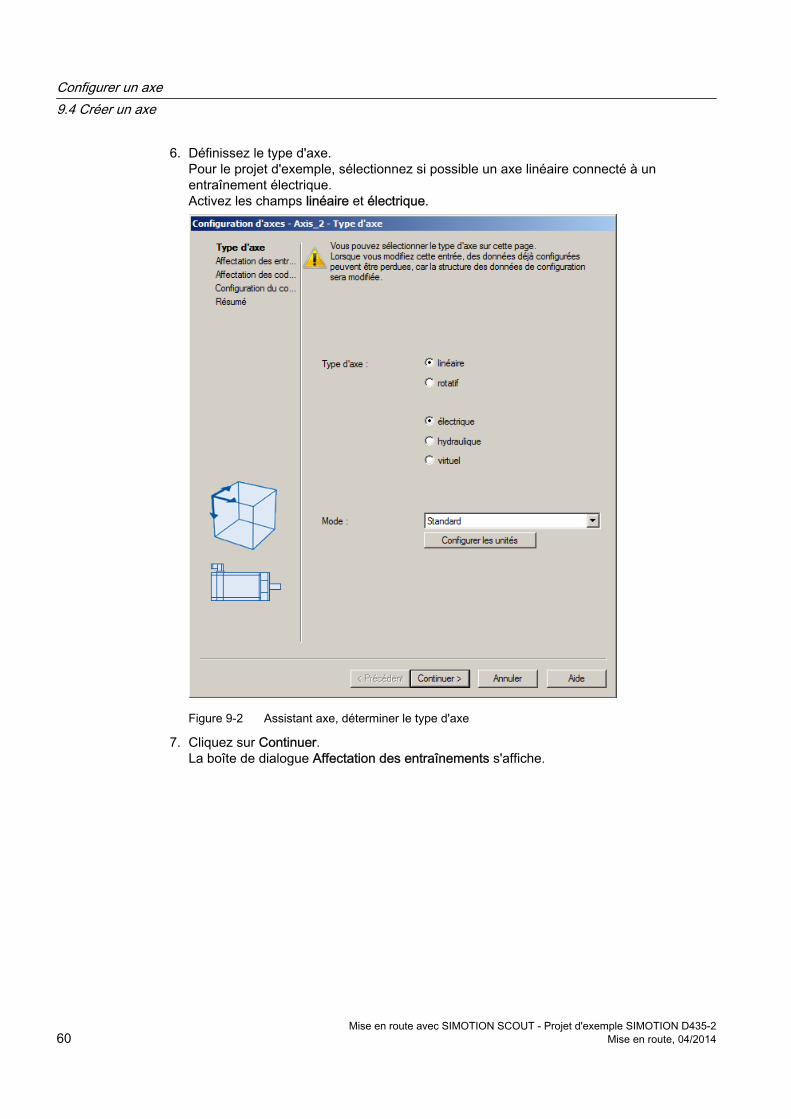
6. Définissez le type d'axe.Pour le projet d'exemple, sélectionnez si possible un axe linéaire connecté à un entraînement électrique.Activez les champs linéaire et électrique.
Figure 9-2 Assistant axe, déterminer le type d'axe
7. Cliquez sur Continuer.La boîte de dialogue Affectation des entraînements s'affiche.
Configurer un axe9.4 Créer un axe
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-260 Mise en route, 04/2014
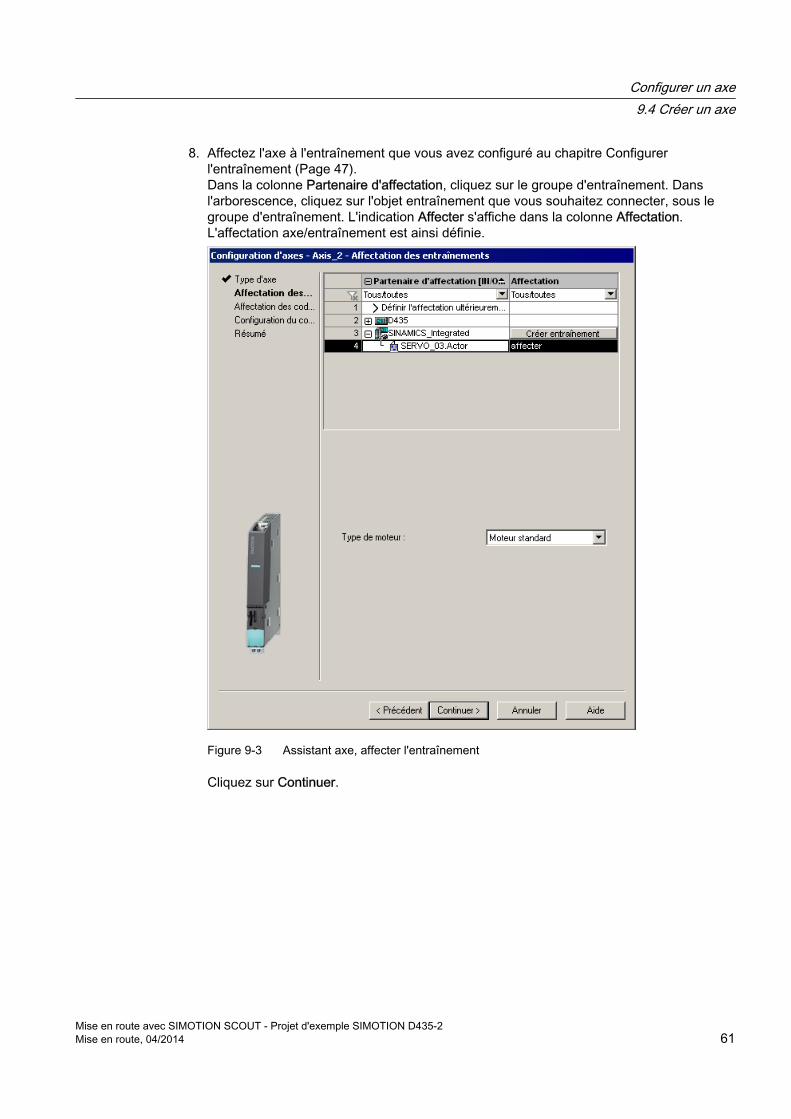
8. Affectez l'axe à l'entraînement que vous avez configuré au chapitre Configurer l'entraînement (Page 47).Dans la colonne Partenaire d'affectation, cliquez sur le groupe d'entraînement. Dans l'arborescence, cliquez sur l'objet entraînement que vous souhaitez connecter, sous le groupe d'entraînement. L'indication Affecter s'affiche dans la colonne Affectation. L'affectation axe/entraînement est ainsi définie.
Figure 9-3 Assistant axe, affecter l'entraînement
Cliquez sur Continuer.
Configurer un axe9.4 Créer un axe
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 61
Remarque
Outre l'affectation de l'axe à un entraînement déjà configuré, l'assistant axe offre deux autres possibilités :● Définir l'affectation de l'axe et de l'entraînement ultérieurement :
L'axe doit être créé, mais n'être affecté qu'ultérieurement à un entraînement. La programmation et la simulation de l'axe sont également possibles ici.
● Créer un entraînement :L'assistant entraînement peut être appelé depuis l'assistant axe (configuration hors ligne). L'axe peut ainsi être créé en une étape avec l'entraînement et être affecté à celui-ci.
Ces alternatives ne sont pas considérées davantage dans la mise en route.
9. Affectez le codeur moteur.Dans la fenêtre Affectation des codeurs, sélectionnez comme réglage par défaut le codeur moteur raccordé à l'entraînement.Cliquez sur Continuer.
10.Pour terminer, l'assistant axe récapitule les données de configuration dans une vue d'ensemble. Vous pouvez ainsi vérifier et corriger les données avant de les appliquer au projet.Fermez la boîte de dialogue en cliquant sur Terminer.L'axe configuré apparaît dans le navigateur de projet.
Figure 9-4 Axe créé dans le navigateur de projet
Paramétrage automatique du système d'ingénieriePour la communication avec l'entraînement, le système d'ingénierie définit automatiquement les télégrammes d'axe PROFIdrive nécessaires et les adresses utilisées.
De même, en fonction de la technologie TO sélectionnée (par exemple SINAMICS Safety Integrated), les télégrammes sont étendus et les interconnexions sont automatiquement créées dans l'entraînement.
Les paramètres d'entraînement et de codeur ainsi que les grandeurs de référence, les grandeurs maximales, les limitations de couple et la granularité de la réduction de couple du SINAMICS S120 sont automatiquement repris pour la configuration des objets technologiques SIMOTION "TO Axe" et "TO Codeur externe". Ces données ne doivent plus être saisies dans SIMOTION.
Configuration supplémentaire de l'axeUne configuration supplémentaire de l'axe est possible dans les boîtes de dialogue accessibles sous l'axe, dans le navigateur de projet. Aucune configuration supplémentaire n'est nécessaire pour le projet d'exemple.
Configurer un axe9.4 Créer un axe
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-262 Mise en route, 04/2014
9.5 Charger la configuration de l'axe dans le système cibleChargez le projet d'exemple avec la configuration de l'axe dans le système cible afin de pouvoir tester le fonctionnement de l'axe au cours de l'étape de configuration suivante.
Etapes1. Enregistrer le projet et compiler les modifications.
2. Etablir une connexion en ligne, si hors ligne.
3. Charger le projet dans le système cible.
Enregistrer et compiler les modificationsDans la barre d'outils, cliquez sur le bouton Enregistrer le projet et compiler les modifications..
Etablir une connexion en ligneDans la barre d'outils, cliquez sur le bouton Connecter aux appareils cibles sélectionnés.
Charger dans le système cibleDans la barre d'outils, cliquez sur le bouton Charger le projet dans le système cible.
Configurer un axe9.5 Charger la configuration de l'axe dans le système cible
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 63

Tester l'axe à l'aide du tableau de commande axe 1010.1 Vue d'ensemble
But de la mise en routeDans ce chapitre de la mise en route, vous testez l'axe configuré. Pour cela, SIMOTION SCOUT met à disposition le tableau de commande axe.
Prérequis● Vous avez configuré l'alimentation (voir chapitre Configurer l'alimentation (Page 53)).
● Vous avez créé un axe dans le projet d'exemple et l'avez entièrement configuré (voir chapitre Configurer un axe (Page 57)).
● Vous avez chargé le projet d'exemple avec la configuration de l'axe dans le système cible (voir chapitre Charger la configuration de l'axe dans le système cible (Page 63)).
● SIMOTION SCOUT est en ligne.
10.2 Tableau de commande axe
Commande et visualisation d'axes individuelsLe tableau de commande axe sert à commander et à visualiser des axes individuels. Il permet de déplacer des axes, y compris l'entraînement.
Vous pouvez par exemple utiliser le tableau de commande pour les tâches suivantes :
● Tester chaque partie de l'installation avant de commander les axes par programme.
● En cas de défaut, tester s'il est possible de faire fonctionner des axes ou entraînements individuels à partir du tableau de commande.
● Commander les axes à des fins d'optimisation (du régulateur).
● Réaliser un déplacement à la position d'origine (Homing)
● Activer et supprimer le déblocage des axes.
10.3 Utilisation du tableau de commande axeDans le projet d'exemple, vous déplacez l'axe configuré en marche par à-coups, afin de vérifier son bon fonctionnement.
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 65
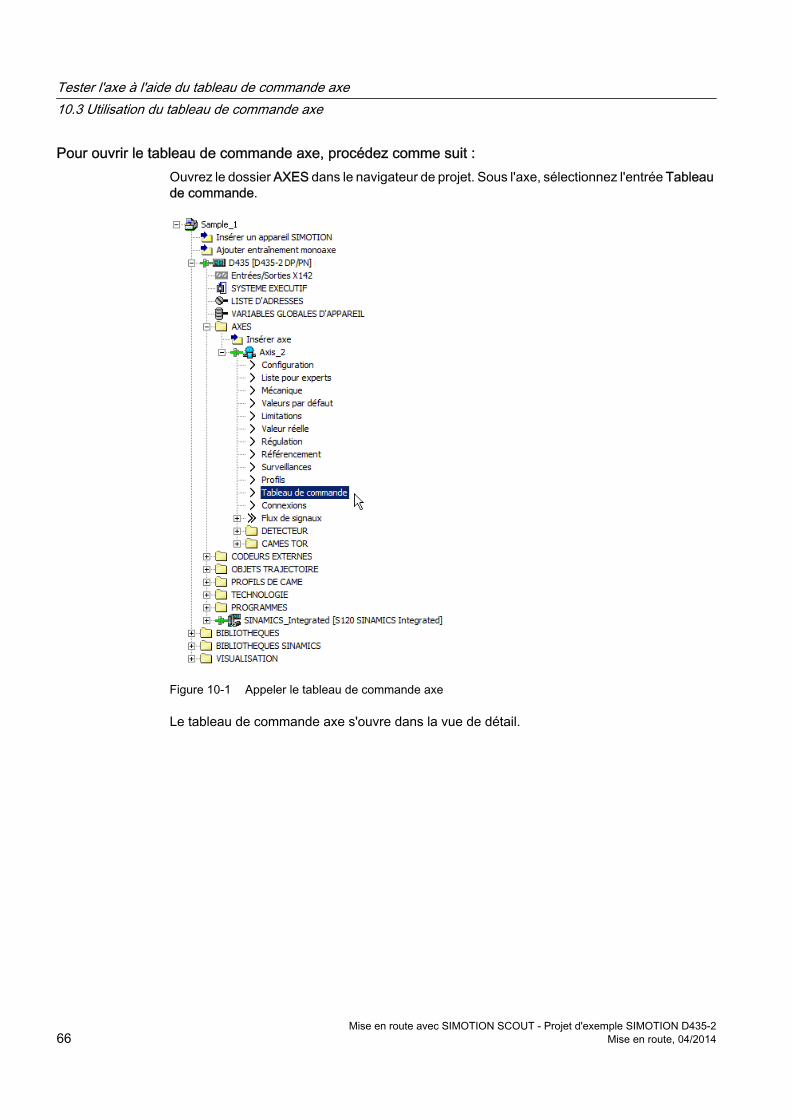
Pour ouvrir le tableau de commande axe, procédez comme suit :Ouvrez le dossier AXES dans le navigateur de projet. Sous l'axe, sélectionnez l'entrée Tableau de commande.
Figure 10-1 Appeler le tableau de commande axe
Le tableau de commande axe s'ouvre dans la vue de détail.
Tester l'axe à l'aide du tableau de commande axe10.3 Utilisation du tableau de commande axe
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-266 Mise en route, 04/2014
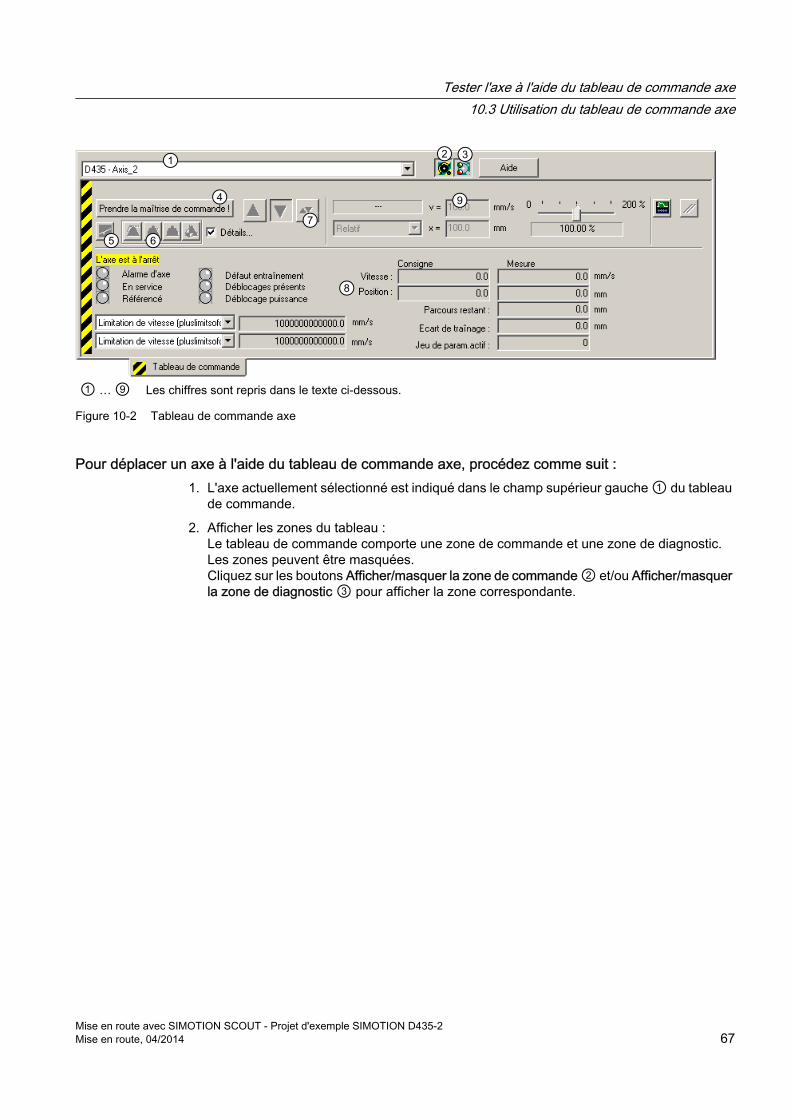
① … ⑨ Les chiffres sont repris dans le texte ci-dessous.
Figure 10-2 Tableau de commande axe
Pour déplacer un axe à l'aide du tableau de commande axe, procédez comme suit :1. L'axe actuellement sélectionné est indiqué dans le champ supérieur gauche ① du tableau
de commande.
2. Afficher les zones du tableau :Le tableau de commande comporte une zone de commande et une zone de diagnostic. Les zones peuvent être masquées.Cliquez sur les boutons Afficher/masquer la zone de commande ② et/ou Afficher/masquer la zone de diagnostic ③ pour afficher la zone correspondante.
Tester l'axe à l'aide du tableau de commande axe10.3 Utilisation du tableau de commande axe
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 67
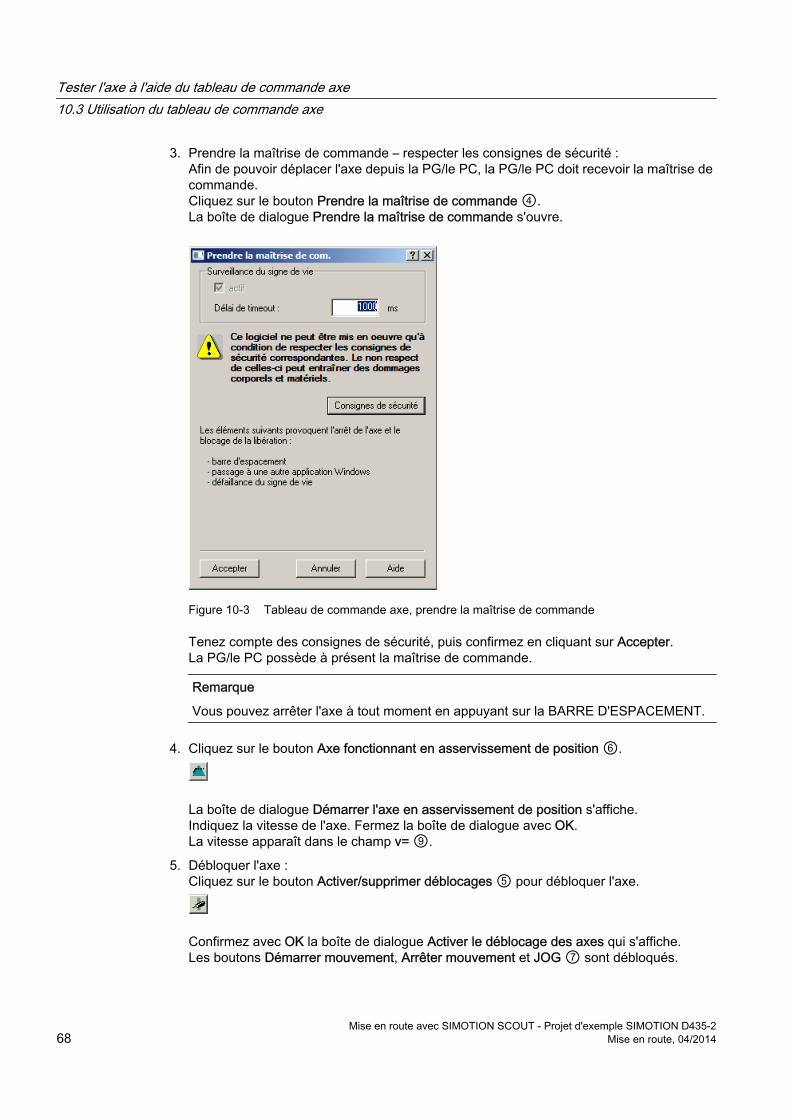
3. Prendre la maîtrise de commande – respecter les consignes de sécurité :Afin de pouvoir déplacer l'axe depuis la PG/le PC, la PG/le PC doit recevoir la maîtrise de commande.Cliquez sur le bouton Prendre la maîtrise de commande ④.La boîte de dialogue Prendre la maîtrise de commande s'ouvre.
Figure 10-3 Tableau de commande axe, prendre la maîtrise de commande
Tenez compte des consignes de sécurité, puis confirmez en cliquant sur Accepter.La PG/le PC possède à présent la maîtrise de commande.
Remarque
Vous pouvez arrêter l'axe à tout moment en appuyant sur la BARRE D'ESPACEMENT.
4. Cliquez sur le bouton Axe fonctionnant en asservissement de position ⑥.
La boîte de dialogue Démarrer l'axe en asservissement de position s'affiche.Indiquez la vitesse de l'axe. Fermez la boîte de dialogue avec OK.La vitesse apparaît dans le champ v= ⑨.
5. Débloquer l'axe :Cliquez sur le bouton Activer/supprimer déblocages ⑤ pour débloquer l'axe.
Confirmez avec OK la boîte de dialogue Activer le déblocage des axes qui s'affiche.Les boutons Démarrer mouvement, Arrêter mouvement et JOG ⑦ sont débloqués.
Tester l'axe à l'aide du tableau de commande axe10.3 Utilisation du tableau de commande axe
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-268 Mise en route, 04/2014
6. Démarrer le mouvement de l'axe : Cliquez sur JOG ⑦.
L'axe se déplace tant que vous appuyez sur le bouton. Vous pouvez visualiser le mouvement de déplacement dans les champs Vitesse et Position ⑧.Le test de l'axe est ainsi terminé.
7. Désactiver le déblocage des axes :Cliquez sur Activer/supprimer déblocages ⑤.Confirmez la boîte de dialogue Supprimer le déblocage des axes avec OK.
8. Rendre la maîtrise de commande :Cliquez sur Rendre la maîtrise de commande ④ pour désactiver la commande des axes depuis la PG/le PC. Dans cet état, les axes ne peuvent plus être commandés depuis la PG/le PC.
9. Passer hors ligne :Sélectionnez la commande de menu Projet > Déconnecter du système cible ou cliquez sur le bouton Déconnecter du système cible de la barre d'outils.
10.4 Résultat dans le projet d'exempleVous avez déplacé l'axe du projet d'exemple à l'aide du tableau de commande axe et avez ainsi vérifié son bon fonctionnement. La configuration de l'axe est terminée.
Tester l'axe à l'aide du tableau de commande axe10.4 Résultat dans le projet d'exemple
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 69

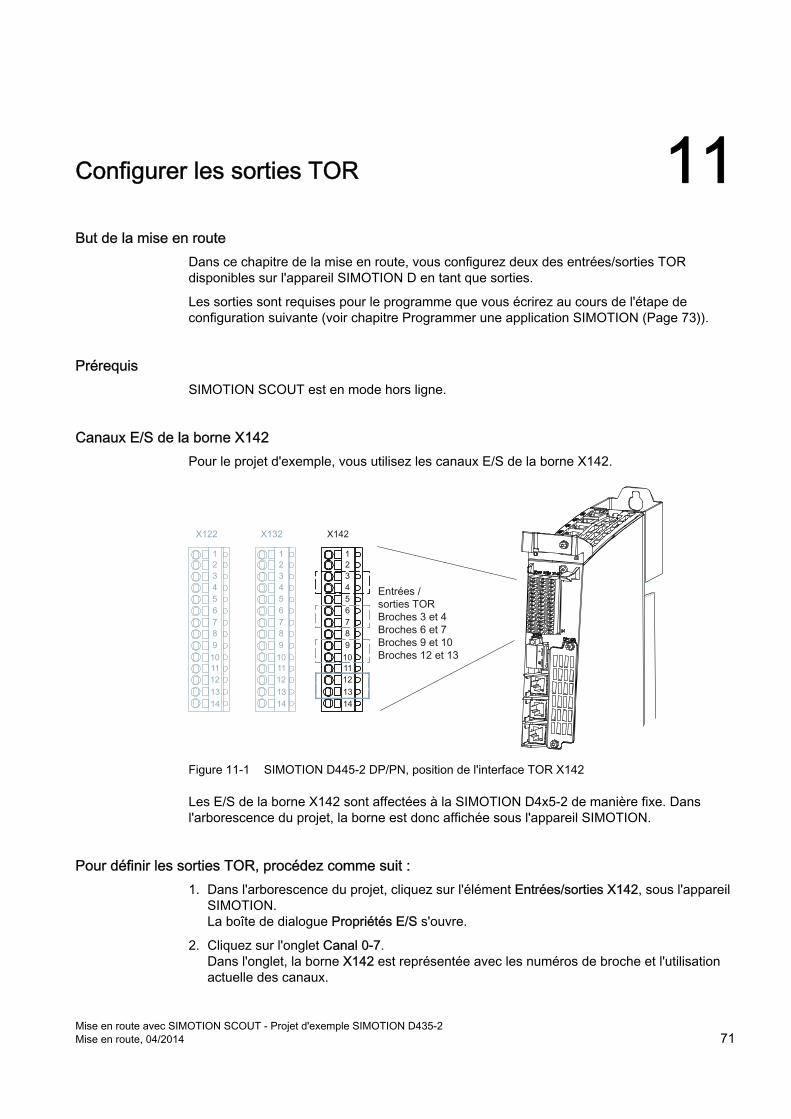
Configurer les sorties TOR 11But de la mise en route
Dans ce chapitre de la mise en route, vous configurez deux des entrées/sorties TOR disponibles sur l'appareil SIMOTION D en tant que sorties.
Les sorties sont requises pour le programme que vous écrirez au cours de l'étape de configuration suivante (voir chapitre Programmer une application SIMOTION (Page 73)).
PrérequisSIMOTION SCOUT est en mode hors ligne.
Canaux E/S de la borne X142Pour le projet d'exemple, vous utilisez les canaux E/S de la borne X142.
Figure 11-1 SIMOTION D445-2 DP/PN, position de l'interface TOR X142
Les E/S de la borne X142 sont affectées à la SIMOTION D4x5‑2 de manière fixe. Dans l'arborescence du projet, la borne est donc affichée sous l'appareil SIMOTION.
Pour définir les sorties TOR, procédez comme suit :1. Dans l'arborescence du projet, cliquez sur l'élément Entrées/sorties X142, sous l'appareil
SIMOTION.La boîte de dialogue Propriétés E/S s'ouvre.
2. Cliquez sur l'onglet Canal 0-7. Dans l'onglet, la borne X142 est représentée avec les numéros de broche et l'utilisation actuelle des canaux.
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 71
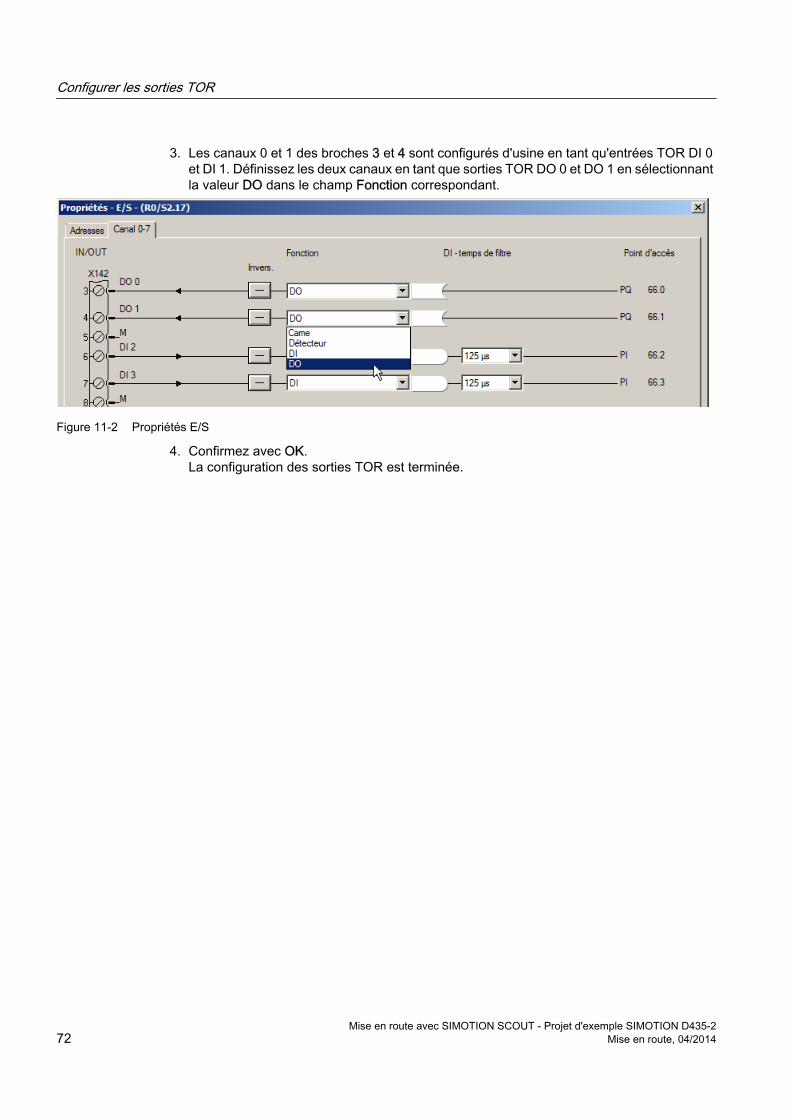
3. Les canaux 0 et 1 des broches 3 et 4 sont configurés d'usine en tant qu'entrées TOR DI 0 et DI 1. Définissez les deux canaux en tant que sorties TOR DO 0 et DO 1 en sélectionnant la valeur DO dans le champ Fonction correspondant.
Figure 11-2 Propriétés E/S
4. Confirmez avec OK.La configuration des sorties TOR est terminée.
Configurer les sorties TOR
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-272 Mise en route, 04/2014
Programmer une application SIMOTION 1212.1 Vue d'ensemble
But de la mise en routeDans ce chapitre, vous écrivez un programme d'application SIMOTION simple pour le projet d'exemple.
● Vous créez les variables dont le programme a besoin.
● Vous créez le programme et les programmes auxiliaires supplémentaires dans les éditeurs graphiques mis à disposition par SIMOTION SCOUT.
Fonction du programmeLe programme commande l'axe configuré dans le projet d'exemple.
● L'alimentation est activée via un appel système SINAMICS.
● L'axe se déplace jusqu'à une position définie et retourne à la position initiale.
● Les états du programme "Programme lancé" et "Fin du programme atteinte" sont connectés aux sorties TOR pour être utilisés dans la périphérie.
Prérequis● Vous avez configuré l'alimentation (voir chapitre Configurer l'alimentation (Page 53)).
● Vous avez configuré un axe et testé son fonctionnement (voir chapitres Configurer un axe (Page 57) et Tester l'axe à l'aide du tableau de commande axe (Page 65)).
● Vous avez préparé deux sorties TOR pour les utiliser dans le programme (voir chapitre Configurer les sorties TOR (Page 71)).
● SIMOTION SCOUT est en mode hors ligne.
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 73
12.2 Variables
12.2.1 Types de variable
Types de variableDans SIMOTION, on distingue plusieurs types de variable.
● Variables systèmeChaque appareil SIMOTION et chaque objet technologique dispose de variables système spécifiques. À l'intérieur de l'appareil SIMOTION, vous pouvez accéder aux variables système à partir de tous les programmes.
● Variables E/SUne variable E/S est un nom de variable symbolique qui est affecté à une adresse E/S de l'appareil SIMOTION ou de la périphérie et qui permet d'accéder directement à la périphérie.Les variables E/S sont valables pour l'ensemble de l'appareil. Tous les programmes de l'appareil SIMOTION y ont accès.
● Les variables globales à l'appareil, les variables Unit et les variables locales sont des variables définies par l'utilisateur dont le domaine de validité est limité :Tous les programmes d'un appareil SIMOTION peuvent accéder aux variables globales à l'appareil.Tous les programmes, blocs fonctionnels et fonctions définis dans la même Unit (source ST, source MCC, source CONT/LOG, etc.) peuvent accéder aux variables Unit.Une Unit (source) est une unité logique que vous pouvez créer dans votre projet et qui peut contenir des programmes, des fonctions et des blocs fonctionnels.L'accès aux variables locales est uniquement possible à l'intérieur du programme, de la fonction ou du bloc fonctionnel dans lequel ou laquelle elles sont définies.
Vous trouverez de plus amples informations concernant les variables dans l'aide en ligne, sous Modèle de variables.
12.2.2 Variables du projet d'exempleLes variables requises pour le projet d'exemple de la mise en route sont les suivantes :
2 variables globales à l'appareil
● g_bo_start
● g_bo_ready
2 variables E/S
● q_bo_output0
● q_bo_output1
En cas d'utilisation d'une alimentation avec interface DRIVE‑CLiQ, en plus :
2 variables E/S
Programmer une application SIMOTION12.2 Variables
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-274 Mise en route, 04/2014
● LineModule_STW
● LineModule_ZSW
Instance
● myFB_LineControl
Utilisation des variables dans le projet d'exempleLes variables g_bo_start et g_bo_ready décrivent de manière redondante les états du programme "Programme lancé" et "Fin du programme atteinte".
Les variables E/S q_bo_output0 et q_bo_output1 transmettent l'état du programme aux sorties TOR configurées de l'appareil SIMOTION (pour un affichage par exemple).
L'instance myFB_LineControl et les variables E/S LineModule_STW et LineModule_ZSW commandent l'alimentation.
12.2.3 Créer les variables globales à l'appareilVous créez les variables globales à l'appareil dans l'onglet Navigateur de mnémoniques de la vue de détail.
Pour créer les variables globales à l'appareil, procédez comme suit :Ci-après, vous créez les variables globales à l'appareil g_bo_start et g_bo_ready pour le projet d'exemple.
La définition des variables comprend les éléments suivants :
● Nom de la variable
● Type de données BOOL
Remarque
Vous ne pouvez créer des variables globales à l'appareil qu'en mode hors ligne.
1. Dans le navigateur de projet, cliquez sur l'élément VARIABLES GLOBALES D'APPAREIL, sous l'appareil SIMOTION.Le tableau Variables globales aux appareils s'affiche dans le navigateur de mnémoniques.
2. Dans la colonne Nom, cliquez sur la première cellule libre et saisissez le nom de variable g_bo_start.Appuyez sur la touche ENTREE ou TAB. Le curseur passe dans le champ Type de données. Vous pouvez également cliquer dans le champ pour y placer le curseur.
3. Dans le champ Type de données, saisissez le type de données BOOL.
Programmer une application SIMOTION12.2 Variables
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 75
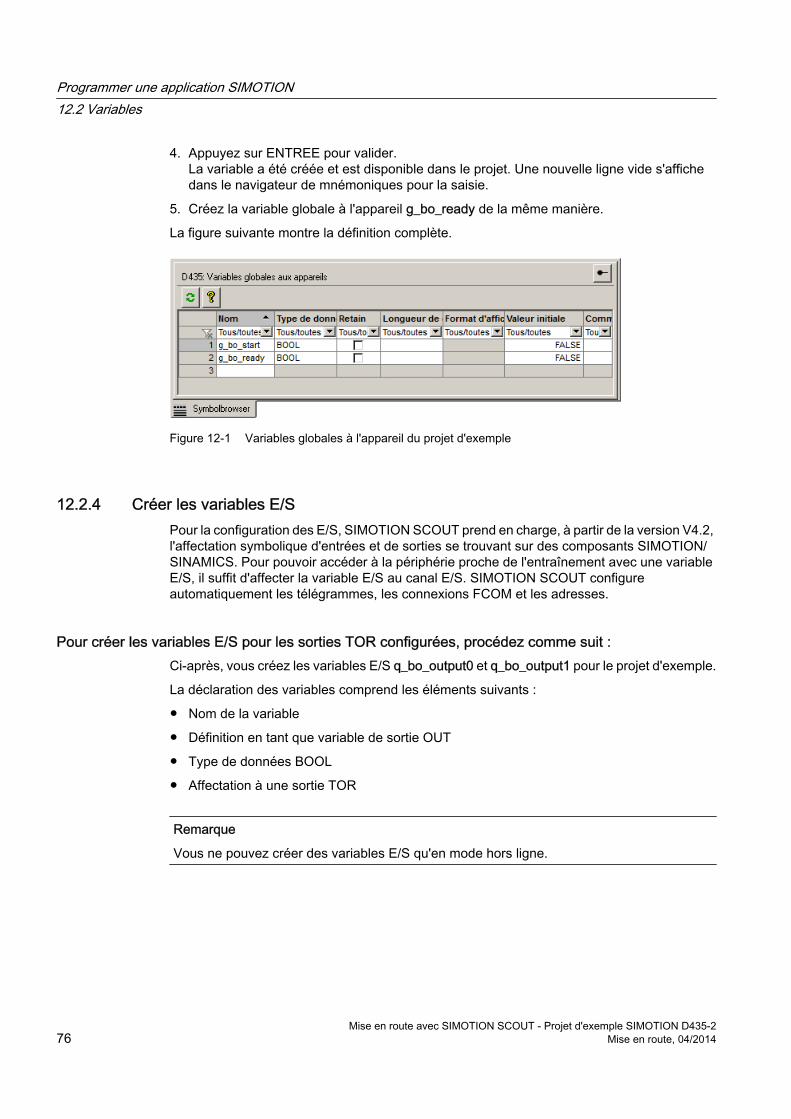
4. Appuyez sur ENTREE pour valider.La variable a été créée et est disponible dans le projet. Une nouvelle ligne vide s'affiche dans le navigateur de mnémoniques pour la saisie.
5. Créez la variable globale à l'appareil g_bo_ready de la même manière.
La figure suivante montre la définition complète.
Figure 12-1 Variables globales à l'appareil du projet d'exemple
12.2.4 Créer les variables E/SPour la configuration des E/S, SIMOTION SCOUT prend en charge, à partir de la version V4.2, l'affectation symbolique d'entrées et de sorties se trouvant sur des composants SIMOTION/SINAMICS. Pour pouvoir accéder à la périphérie proche de l'entraînement avec une variable E/S, il suffit d'affecter la variable E/S au canal E/S. SIMOTION SCOUT configure automatiquement les télégrammes, les connexions FCOM et les adresses.
Pour créer les variables E/S pour les sorties TOR configurées, procédez comme suit :Ci-après, vous créez les variables E/S q_bo_output0 et q_bo_output1 pour le projet d'exemple.
La déclaration des variables comprend les éléments suivants :
● Nom de la variable
● Définition en tant que variable de sortie OUT
● Type de données BOOL
● Affectation à une sortie TOR
Remarque
Vous ne pouvez créer des variables E/S qu'en mode hors ligne.
Programmer une application SIMOTION12.2 Variables
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-276 Mise en route, 04/2014
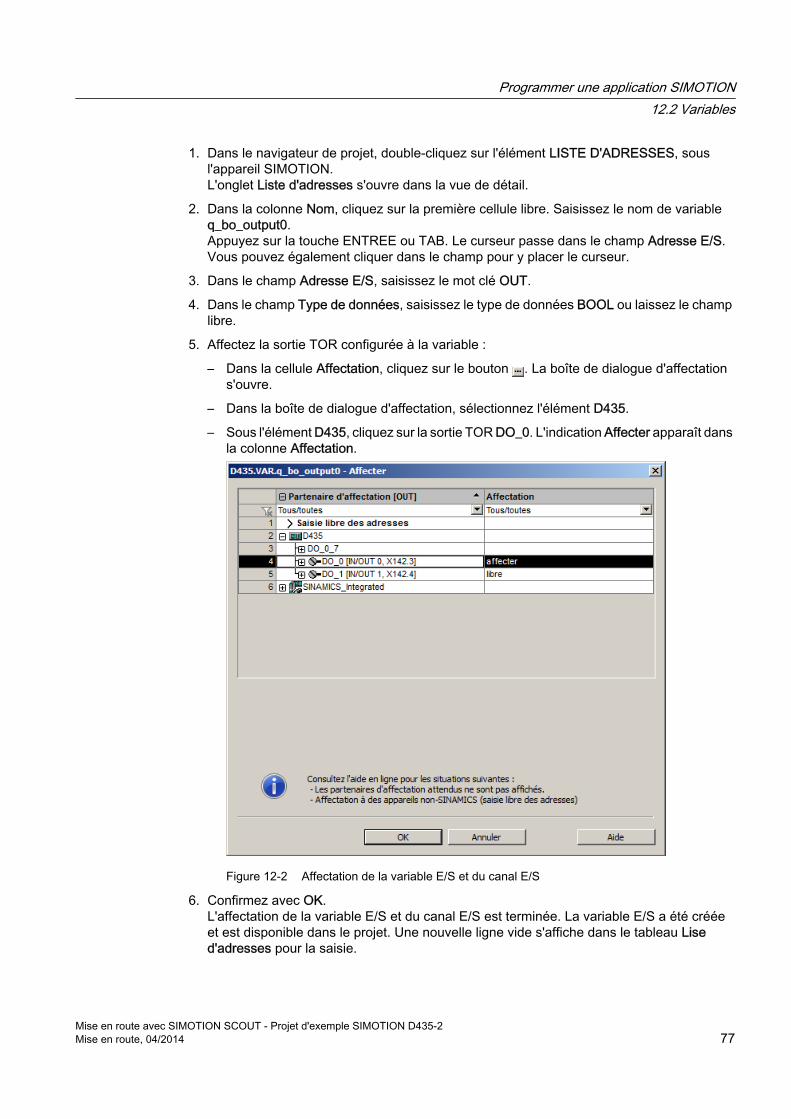
1. Dans le navigateur de projet, double-cliquez sur l'élément LISTE D'ADRESSES, sous l'appareil SIMOTION.L'onglet Liste d'adresses s'ouvre dans la vue de détail.
2. Dans la colonne Nom, cliquez sur la première cellule libre. Saisissez le nom de variable q_bo_output0.Appuyez sur la touche ENTREE ou TAB. Le curseur passe dans le champ Adresse E/S. Vous pouvez également cliquer dans le champ pour y placer le curseur.
3. Dans le champ Adresse E/S, saisissez le mot clé OUT.
4. Dans le champ Type de données, saisissez le type de données BOOL ou laissez le champ libre.
5. Affectez la sortie TOR configurée à la variable :
– Dans la cellule Affectation, cliquez sur le bouton . La boîte de dialogue d'affectation s'ouvre.
– Dans la boîte de dialogue d'affectation, sélectionnez l'élément D435.
– Sous l'élément D435, cliquez sur la sortie TOR DO_0. L'indication Affecter apparaît dans la colonne Affectation.
Figure 12-2 Affectation de la variable E/S et du canal E/S
6. Confirmez avec OK.L'affectation de la variable E/S et du canal E/S est terminée. La variable E/S a été créée et est disponible dans le projet. Une nouvelle ligne vide s'affiche dans le tableau Lise d'adresses pour la saisie.
Programmer une application SIMOTION12.2 Variables
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 77
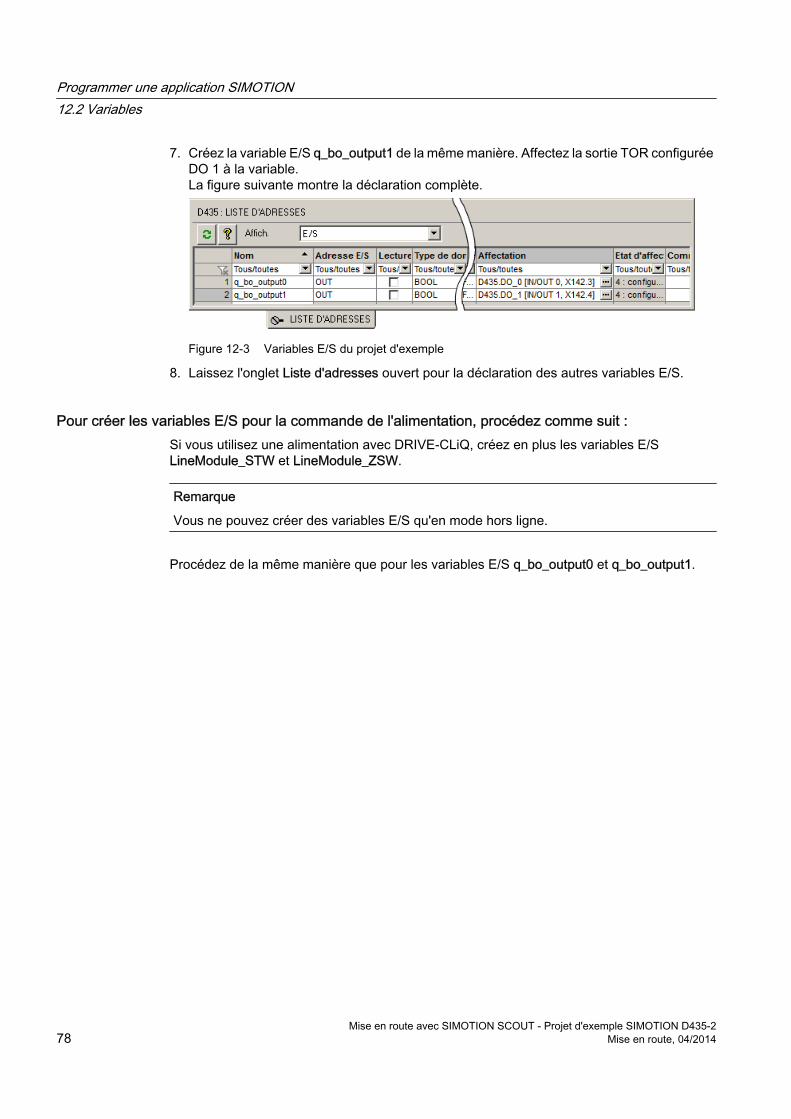
7. Créez la variable E/S q_bo_output1 de la même manière. Affectez la sortie TOR configurée DO 1 à la variable.La figure suivante montre la déclaration complète.
Figure 12-3 Variables E/S du projet d'exemple
8. Laissez l'onglet Liste d'adresses ouvert pour la déclaration des autres variables E/S.
Pour créer les variables E/S pour la commande de l'alimentation, procédez comme suit :Si vous utilisez une alimentation avec DRIVE-CLiQ, créez en plus les variables E/S LineModule_STW et LineModule_ZSW.
Remarque
Vous ne pouvez créer des variables E/S qu'en mode hors ligne.
Procédez de la même manière que pour les variables E/S q_bo_output0 et q_bo_output1.
Programmer une application SIMOTION12.2 Variables
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-278 Mise en route, 04/2014
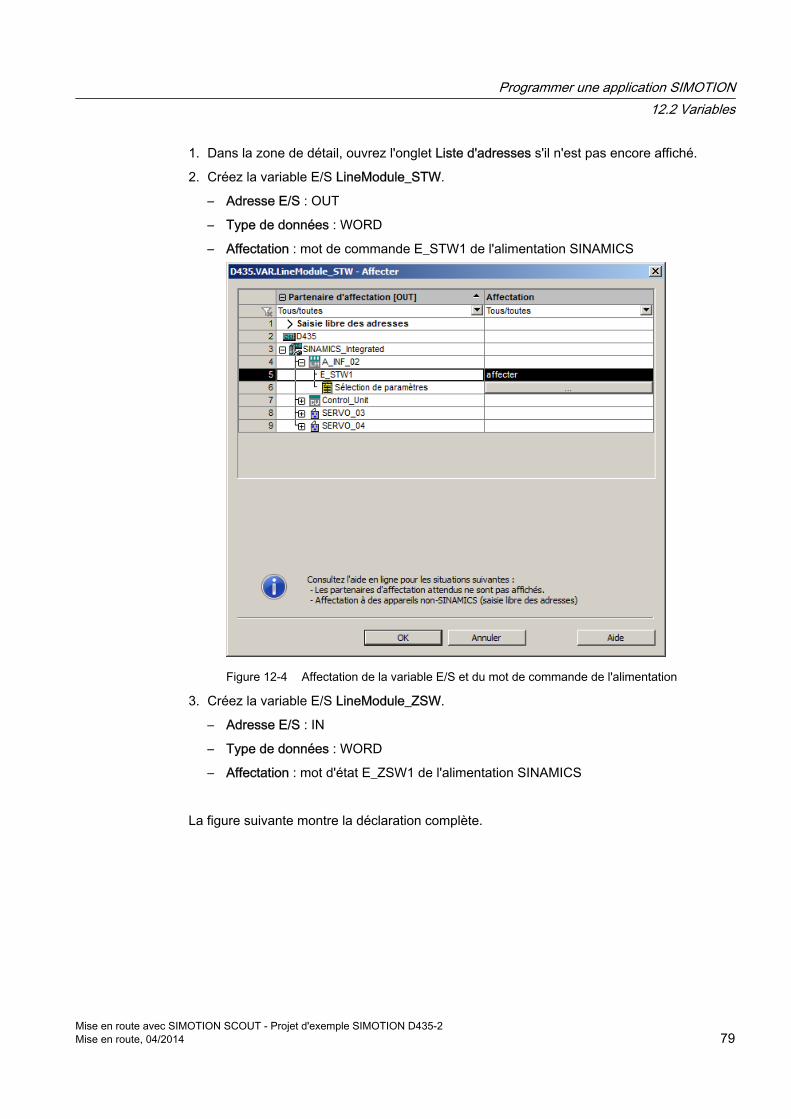
1. Dans la zone de détail, ouvrez l'onglet Liste d'adresses s'il n'est pas encore affiché.
2. Créez la variable E/S LineModule_STW.
– Adresse E/S : OUT
– Type de données : WORD
– Affectation : mot de commande E_STW1 de l'alimentation SINAMICS
Figure 12-4 Affectation de la variable E/S et du mot de commande de l'alimentation
3. Créez la variable E/S LineModule_ZSW.
– Adresse E/S : IN
– Type de données : WORD
– Affectation : mot d'état E_ZSW1 de l'alimentation SINAMICS
La figure suivante montre la déclaration complète.
Programmer une application SIMOTION12.2 Variables
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 79
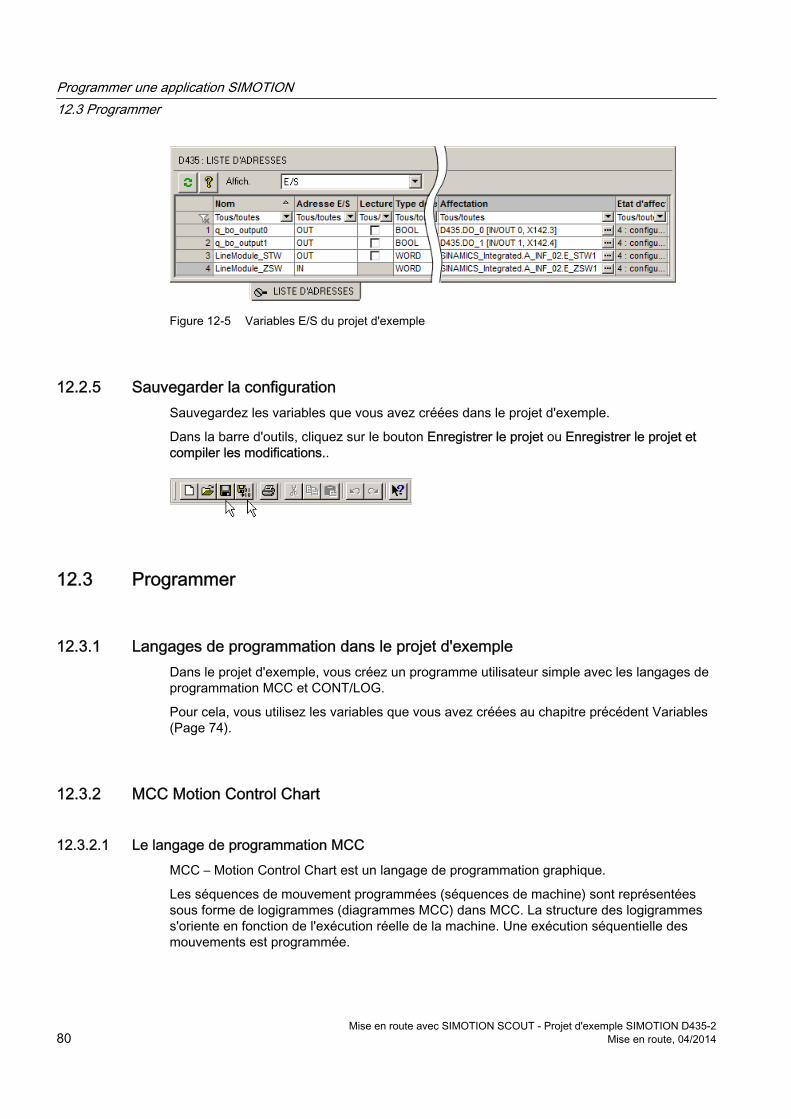
Figure 12-5 Variables E/S du projet d'exemple
12.2.5 Sauvegarder la configurationSauvegardez les variables que vous avez créées dans le projet d'exemple.
Dans la barre d'outils, cliquez sur le bouton Enregistrer le projet ou Enregistrer le projet et compiler les modifications..
12.3 Programmer
12.3.1 Langages de programmation dans le projet d'exempleDans le projet d'exemple, vous créez un programme utilisateur simple avec les langages de programmation MCC et CONT/LOG.
Pour cela, vous utilisez les variables que vous avez créées au chapitre précédent Variables (Page 74).
12.3.2 MCC Motion Control Chart
12.3.2.1 Le langage de programmation MCCMCC – Motion Control Chart est un langage de programmation graphique.
Les séquences de mouvement programmées (séquences de machine) sont représentées sous forme de logigrammes (diagrammes MCC) dans MCC. La structure des logigrammes s'oriente en fonction de l'exécution réelle de la machine. Une exécution séquentielle des mouvements est programmée.
Programmer une application SIMOTION12.3 Programmer
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-280 Mise en route, 04/2014
Systématique dans SIMOTION SCOUTLe dossier PROGRAMMES se trouvant sous l'appareil SIMOTION contient les sources MCC créées dans le projet.
Une source MCC contient les programmes MCC devant être exécutés sur l'appareil SIMOTION.
"Programme MCC" est un terme général pour différentes unités d'organisation de programme.
Une unité d'organisation de programme peut être un programme, une fonction ou un bloc fonctionnel. Dans le navigateur de projet, le type d'unité d'organisation de programme est représenté par une icône :
Programme
Fonction
Bloc fonctionnel
Un diagramme MCC est une représentation graphique d'une unité d'organisation de programme.
Une source MCC peu contenir plusieurs diagrammes MCC.
Étapes de création d'un programmeLa création d'un programme MCC comporte les étapes suivantes :
1. Création de la source MCC.
2. Création du diagramme MCC dans la source MCC.
3. Insertion de commandes MCC dans le diagramme MCC et paramétrage des commandes.
12.3.2.2 Créer une source MCCCi-après, vous créez la source MCC motion pour le projet d'exemple.
Pour créer une source MCC dans le projet, procédez comme suit :1. Dans le navigateur de projet, ouvrez le dossier PROGRAMMES sous l'appareil SIMOTION.
Double-cliquez sur Insérer source MCC. La fenêtre Insérer source MCC s'affiche.
2. Saisissez le nom motion.
Programmer une application SIMOTION12.3 Programmer
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 81
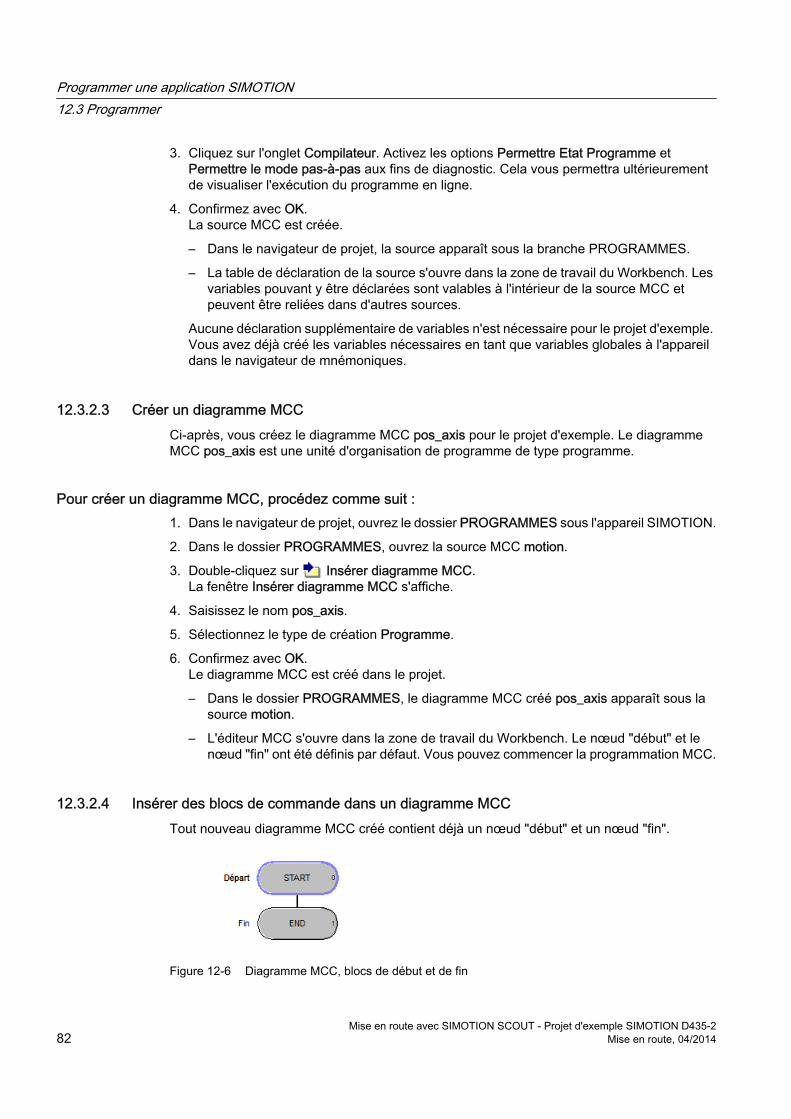
3. Cliquez sur l'onglet Compilateur. Activez les options Permettre Etat Programme et Permettre le mode pas-à-pas aux fins de diagnostic. Cela vous permettra ultérieurement de visualiser l'exécution du programme en ligne.
4. Confirmez avec OK.La source MCC est créée.
– Dans le navigateur de projet, la source apparaît sous la branche PROGRAMMES.
– La table de déclaration de la source s'ouvre dans la zone de travail du Workbench. Les variables pouvant y être déclarées sont valables à l'intérieur de la source MCC et peuvent être reliées dans d'autres sources.
Aucune déclaration supplémentaire de variables n'est nécessaire pour le projet d'exemple. Vous avez déjà créé les variables nécessaires en tant que variables globales à l'appareil dans le navigateur de mnémoniques.
12.3.2.3 Créer un diagramme MCCCi-après, vous créez le diagramme MCC pos_axis pour le projet d'exemple. Le diagramme MCC pos_axis est une unité d'organisation de programme de type programme.
Pour créer un diagramme MCC, procédez comme suit :1. Dans le navigateur de projet, ouvrez le dossier PROGRAMMES sous l'appareil SIMOTION.
2. Dans le dossier PROGRAMMES, ouvrez la source MCC motion.
3. Double-cliquez sur Insérer diagramme MCC.La fenêtre Insérer diagramme MCC s'affiche.
4. Saisissez le nom pos_axis.
5. Sélectionnez le type de création Programme.
6. Confirmez avec OK.Le diagramme MCC est créé dans le projet.
– Dans le dossier PROGRAMMES, le diagramme MCC créé pos_axis apparaît sous la source motion.
– L'éditeur MCC s'ouvre dans la zone de travail du Workbench. Le nœud "début" et le nœud "fin" ont été définis par défaut. Vous pouvez commencer la programmation MCC.
12.3.2.4 Insérer des blocs de commande dans un diagramme MCCTout nouveau diagramme MCC créé contient déjà un nœud "début" et un nœud "fin".
Figure 12-6 Diagramme MCC, blocs de début et de fin
Programmer une application SIMOTION12.3 Programmer
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-282 Mise en route, 04/2014
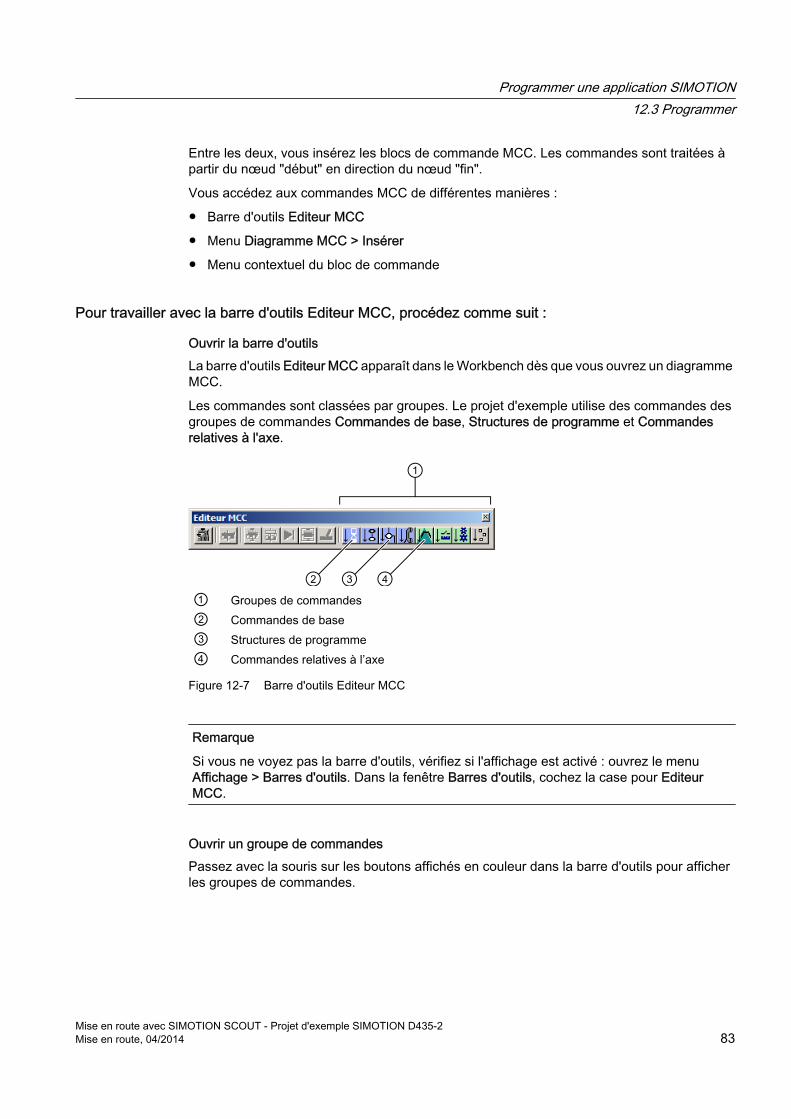
Entre les deux, vous insérez les blocs de commande MCC. Les commandes sont traitées à partir du nœud "début" en direction du nœud "fin".
Vous accédez aux commandes MCC de différentes manières :
● Barre d'outils Editeur MCC
● Menu Diagramme MCC > Insérer
● Menu contextuel du bloc de commande
Pour travailler avec la barre d'outils Editeur MCC, procédez comme suit :
Ouvrir la barre d'outilsLa barre d'outils Editeur MCC apparaît dans le Workbench dès que vous ouvrez un diagramme MCC.
Les commandes sont classées par groupes. Le projet d'exemple utilise des commandes des groupes de commandes Commandes de base, Structures de programme et Commandes relatives à l'axe.
① Groupes de commandes② Commandes de base③ Structures de programme④ Commandes relatives à l’axe
Figure 12-7 Barre d'outils Editeur MCC
Remarque
Si vous ne voyez pas la barre d'outils, vérifiez si l'affichage est activé : ouvrez le menu Affichage > Barres d'outils. Dans la fenêtre Barres d'outils, cochez la case pour Editeur MCC.
Ouvrir un groupe de commandesPassez avec la souris sur les boutons affichés en couleur dans la barre d'outils pour afficher les groupes de commandes.
Programmer une application SIMOTION12.3 Programmer
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 83
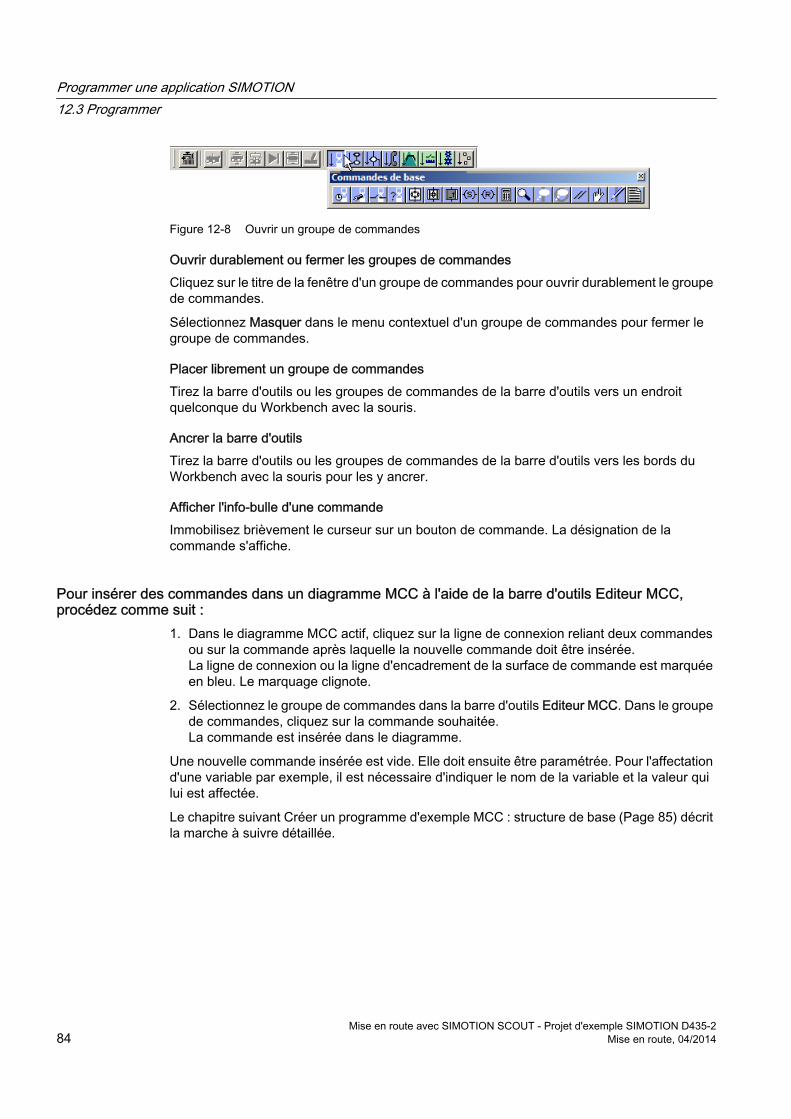
Figure 12-8 Ouvrir un groupe de commandes
Ouvrir durablement ou fermer les groupes de commandesCliquez sur le titre de la fenêtre d'un groupe de commandes pour ouvrir durablement le groupe de commandes.
Sélectionnez Masquer dans le menu contextuel d'un groupe de commandes pour fermer le groupe de commandes.
Placer librement un groupe de commandesTirez la barre d'outils ou les groupes de commandes de la barre d'outils vers un endroit quelconque du Workbench avec la souris.
Ancrer la barre d'outilsTirez la barre d'outils ou les groupes de commandes de la barre d'outils vers les bords du Workbench avec la souris pour les y ancrer.
Afficher l'info-bulle d'une commandeImmobilisez brièvement le curseur sur un bouton de commande. La désignation de la commande s'affiche.
Pour insérer des commandes dans un diagramme MCC à l'aide de la barre d'outils Editeur MCC, procédez comme suit :
1. Dans le diagramme MCC actif, cliquez sur la ligne de connexion reliant deux commandes ou sur la commande après laquelle la nouvelle commande doit être insérée.La ligne de connexion ou la ligne d'encadrement de la surface de commande est marquée en bleu. Le marquage clignote.
2. Sélectionnez le groupe de commandes dans la barre d'outils Editeur MCC. Dans le groupe de commandes, cliquez sur la commande souhaitée.La commande est insérée dans le diagramme.
Une nouvelle commande insérée est vide. Elle doit ensuite être paramétrée. Pour l'affectation d'une variable par exemple, il est nécessaire d'indiquer le nom de la variable et la valeur qui lui est affectée.
Le chapitre suivant Créer un programme d'exemple MCC : structure de base (Page 85) décrit la marche à suivre détaillée.
Programmer une application SIMOTION12.3 Programmer
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-284 Mise en route, 04/2014
12.4 Créer un programme d'exemple MCC : structure de base
12.4.1 Vue d'ensembleDans le projet d'exemple, vous créez le programme MCC pos_axis. Le programme doit déplacer un axe jusqu'à une position de destination, puis le faire revenir à la position initiale.
Traitement de l'alimentationSi vous utilisez une alimentation sans interface DRIVE‑CLiQ, la structure de base traitée dans ce chapitre suffit pour le fonctionnement de l'axe commandé par programme. Le signal "prêt à fonctionner" de l'alimentation est connecté à l'entrée TOR DI 0 de la D435‑2 (voir chapitre Configurer l'alimentation (Page 53)).
Si vous utilisez une alimentation avec interface DRIVE-CLiQ, le programme doit activer l'alimentation. Cette séquence de programme supplémentaire est traitée séparément au chapitre Etendre le programme d'exemple MCC : commande de l'alimentation (Page 98) de la mise en route.
12.4.2 Exécution du programme
Le diagramme MCC finiLa figure ci-dessous illustre le diagramme MCC fini du programme d'exemple.
Les deux premiers blocs de commande initialisent les variables g_bo_ready et g_bo_start. L'axe est ensuite débloqué, référencé et déplacé jusqu'à la position de destination. Après avoir atteint la position, l'axe retourne à la position initiale. Le déblocage est supprimé. Finalement la variable g_bo_start est remise à 0 et la variable g_bo_ready à 1.
Programmer une application SIMOTION12.4 Créer un programme d'exemple MCC : structure de base
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 85
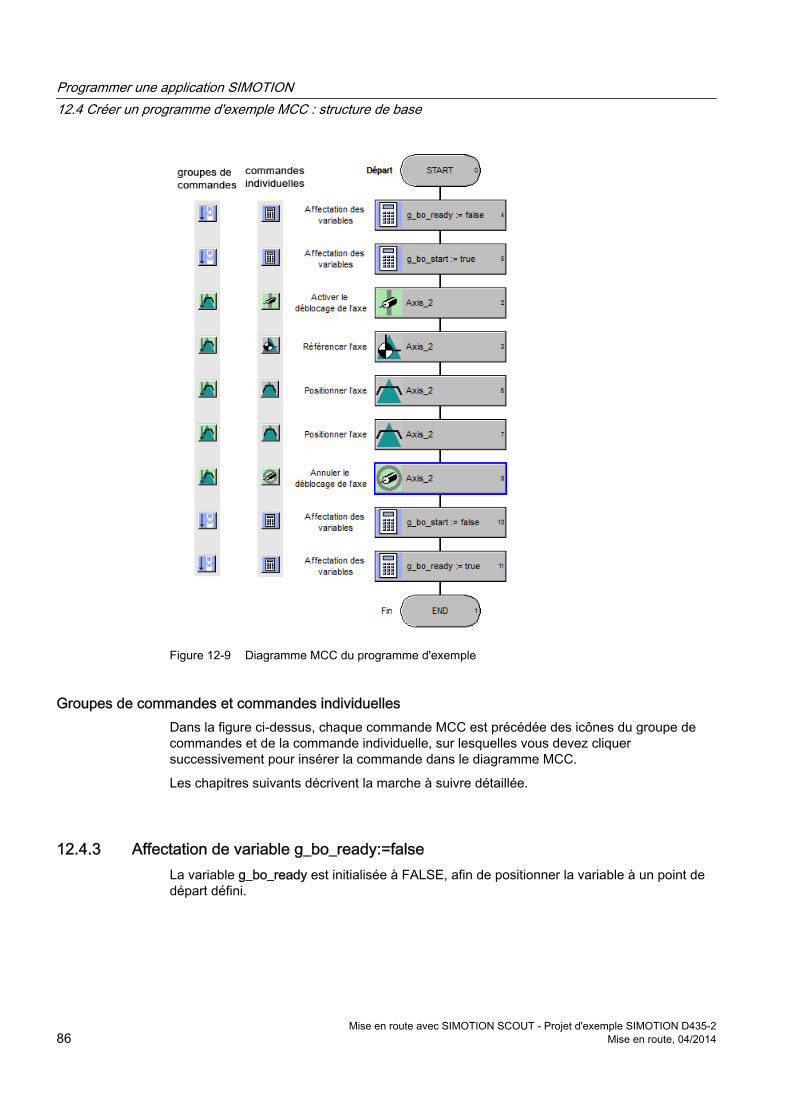
Figure 12-9 Diagramme MCC du programme d'exemple
Groupes de commandes et commandes individuellesDans la figure ci-dessus, chaque commande MCC est précédée des icônes du groupe de commandes et de la commande individuelle, sur lesquelles vous devez cliquer successivement pour insérer la commande dans le diagramme MCC.
Les chapitres suivants décrivent la marche à suivre détaillée.
12.4.3 Affectation de variable g_bo_ready:=falseLa variable g_bo_ready est initialisée à FALSE, afin de positionner la variable à un point de départ défini.
Programmer une application SIMOTION12.4 Créer un programme d'exemple MCC : structure de base
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-286 Mise en route, 04/2014
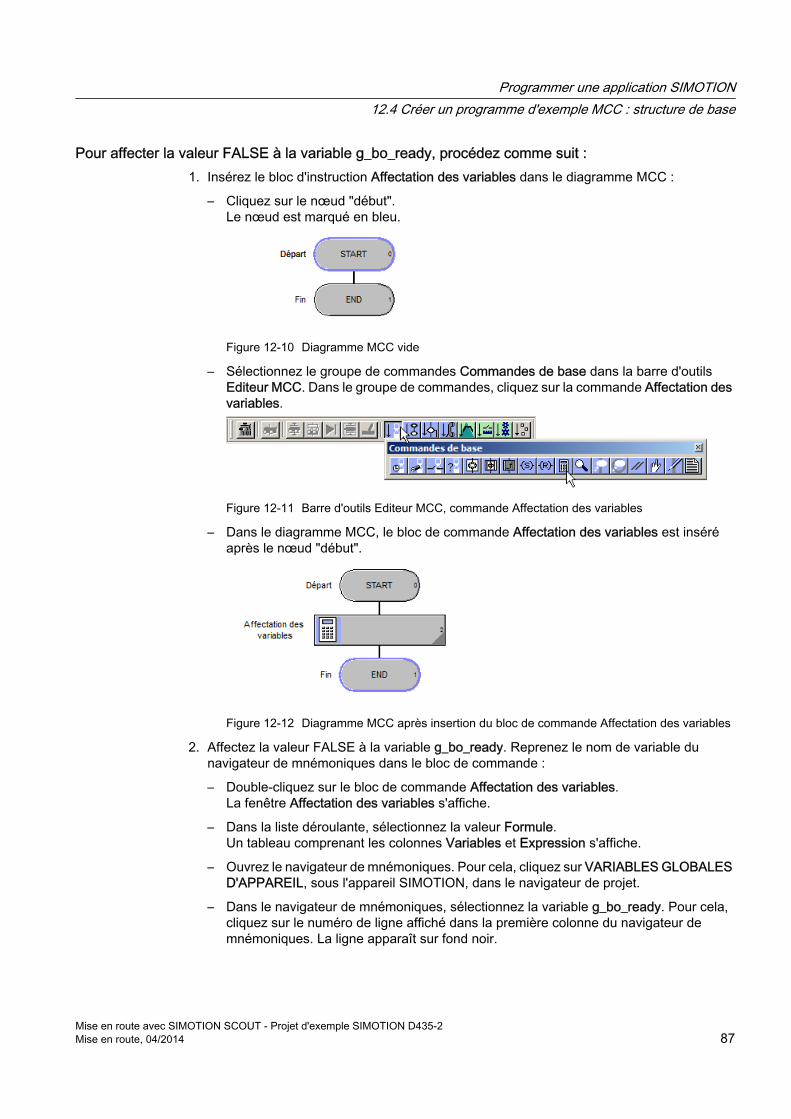
Pour affecter la valeur FALSE à la variable g_bo_ready, procédez comme suit :1. Insérez le bloc d'instruction Affectation des variables dans le diagramme MCC :
– Cliquez sur le nœud "début".Le nœud est marqué en bleu.
Figure 12-10 Diagramme MCC vide
– Sélectionnez le groupe de commandes Commandes de base dans la barre d'outils Editeur MCC. Dans le groupe de commandes, cliquez sur la commande Affectation des variables.
Figure 12-11 Barre d'outils Editeur MCC, commande Affectation des variables
– Dans le diagramme MCC, le bloc de commande Affectation des variables est inséré après le nœud "début".
Figure 12-12 Diagramme MCC après insertion du bloc de commande Affectation des variables
2. Affectez la valeur FALSE à la variable g_bo_ready. Reprenez le nom de variable du navigateur de mnémoniques dans le bloc de commande :
– Double-cliquez sur le bloc de commande Affectation des variables.La fenêtre Affectation des variables s'affiche.
– Dans la liste déroulante, sélectionnez la valeur Formule.Un tableau comprenant les colonnes Variables et Expression s'affiche.
– Ouvrez le navigateur de mnémoniques. Pour cela, cliquez sur VARIABLES GLOBALES D'APPAREIL, sous l'appareil SIMOTION, dans le navigateur de projet.
– Dans le navigateur de mnémoniques, sélectionnez la variable g_bo_ready. Pour cela, cliquez sur le numéro de ligne affiché dans la première colonne du navigateur de mnémoniques. La ligne apparaît sur fond noir.
Programmer une application SIMOTION12.4 Créer un programme d'exemple MCC : structure de base
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 87
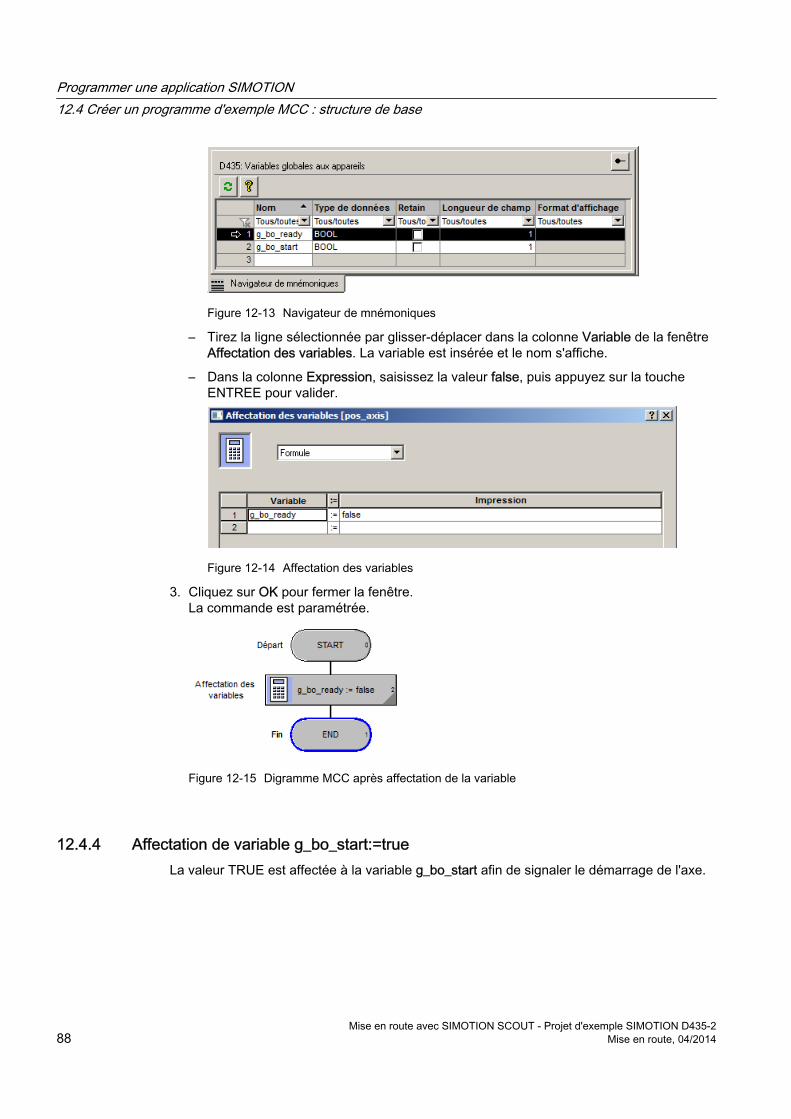
Figure 12-13 Navigateur de mnémoniques
– Tirez la ligne sélectionnée par glisser-déplacer dans la colonne Variable de la fenêtre Affectation des variables. La variable est insérée et le nom s'affiche.
– Dans la colonne Expression, saisissez la valeur false, puis appuyez sur la touche ENTREE pour valider.
Figure 12-14 Affectation des variables
3. Cliquez sur OK pour fermer la fenêtre.La commande est paramétrée.
Figure 12-15 Digramme MCC après affectation de la variable
12.4.4 Affectation de variable g_bo_start:=trueLa valeur TRUE est affectée à la variable g_bo_start afin de signaler le démarrage de l'axe.
Programmer une application SIMOTION12.4 Créer un programme d'exemple MCC : structure de base
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-288 Mise en route, 04/2014
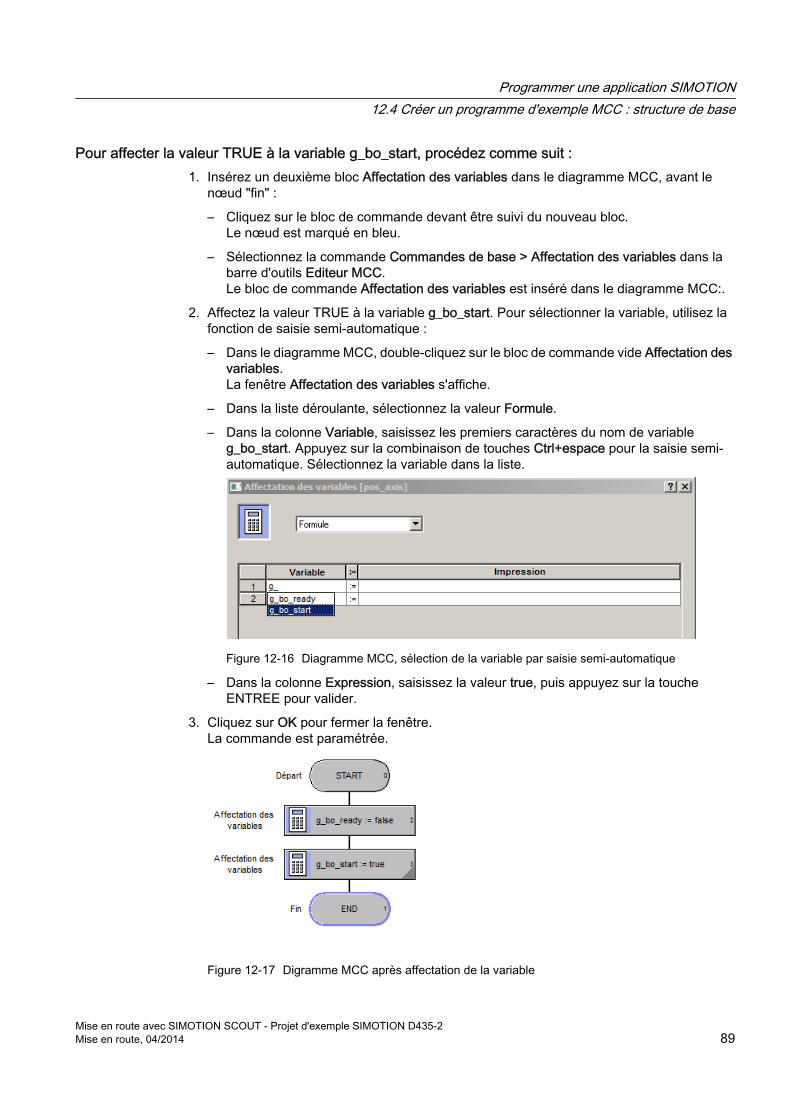
Pour affecter la valeur TRUE à la variable g_bo_start, procédez comme suit :1. Insérez un deuxième bloc Affectation des variables dans le diagramme MCC, avant le
nœud "fin" :
– Cliquez sur le bloc de commande devant être suivi du nouveau bloc.Le nœud est marqué en bleu.
– Sélectionnez la commande Commandes de base > Affectation des variables dans la barre d'outils Editeur MCC.Le bloc de commande Affectation des variables est inséré dans le diagramme MCC:.
2. Affectez la valeur TRUE à la variable g_bo_start. Pour sélectionner la variable, utilisez la fonction de saisie semi-automatique :
– Dans le diagramme MCC, double-cliquez sur le bloc de commande vide Affectation des variables.La fenêtre Affectation des variables s'affiche.
– Dans la liste déroulante, sélectionnez la valeur Formule.
– Dans la colonne Variable, saisissez les premiers caractères du nom de variable g_bo_start. Appuyez sur la combinaison de touches Ctrl+espace pour la saisie semi-automatique. Sélectionnez la variable dans la liste.
Figure 12-16 Diagramme MCC, sélection de la variable par saisie semi-automatique
– Dans la colonne Expression, saisissez la valeur true, puis appuyez sur la touche ENTREE pour valider.
3. Cliquez sur OK pour fermer la fenêtre.La commande est paramétrée.
Figure 12-17 Digramme MCC après affectation de la variable
Programmer une application SIMOTION12.4 Créer un programme d'exemple MCC : structure de base
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 89

12.4.5 Activer le déblocage des axes
Pour activer le déblocage des axes, procédez comme suit :1. Insérez le bloc d'instruction Activer le déblocage des axes dans le diagramme MCC, avant
le nœud "fin" :
– Cliquez sur le dernier bloc précédant le nœud "fin". Le nœud est marqué en bleu.
– Sélectionnez le groupe de commandes Commandes relatives à l'axe dans la barre d'outils Editeur MCC. Dans le groupe de commandes, cliquez sur la commande Activer le déblocage des axes.
Figure 12-18 Barre d'outils Editeur MCC, commande Activer le déblocage des axes
Dans le diagramme MCC, le bloc de commande Activer le déblocage des axes est inséré après le bloc sélectionné et est marqué en bleu.
2. Paramétrez le déblocage des axes.
– Dans le diagramme MCC, double-cliquez sur le bloc de commande inséré Activer le déblocage des axes. La fenêtre Activer le déblocage des axes s'affiche.
– Dans le champ Axe, sélectionnez l'axe commandé par le programme.
– Veillez à ce que l'option Retarder l'exécution du programme soit sélectionnée pour le projet d'exemple. La commande n'est alors terminée que lorsque l'axe est débloqué.Ne modifiez pas les valeurs par défaut des autres paramètres.
Programmer une application SIMOTION12.4 Créer un programme d'exemple MCC : structure de base
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-290 Mise en route, 04/2014
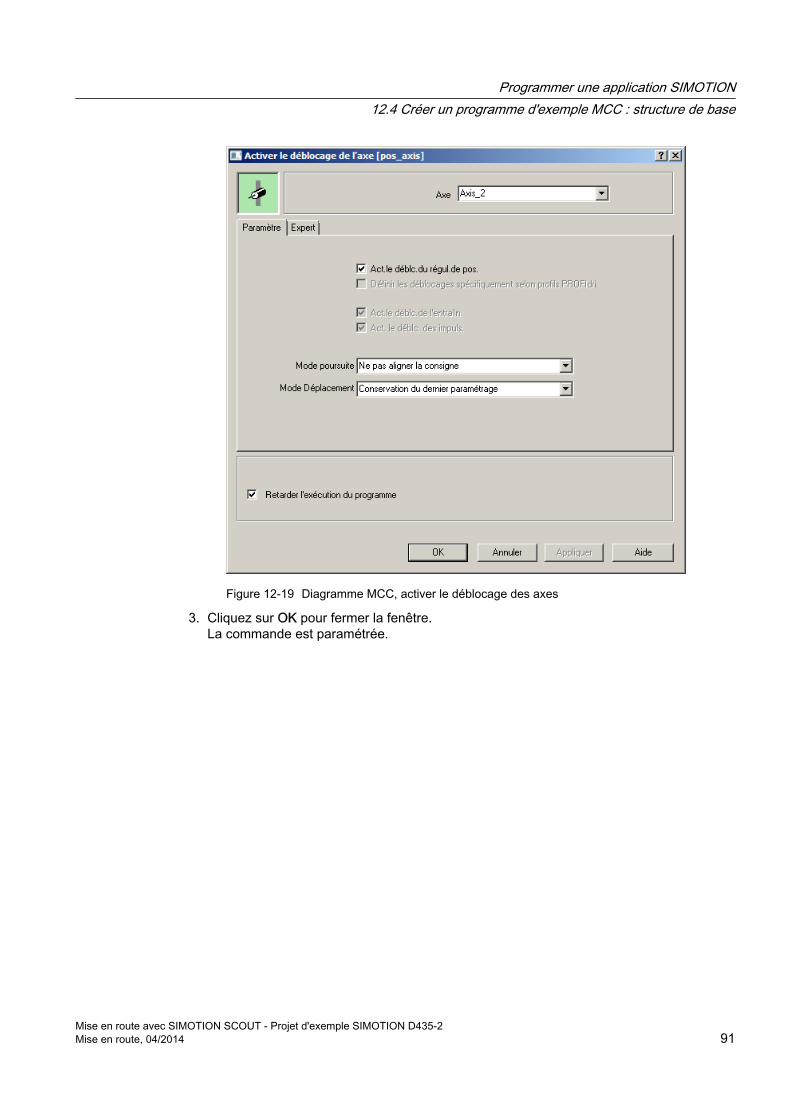
Figure 12-19 Diagramme MCC, activer le déblocage des axes
3. Cliquez sur OK pour fermer la fenêtre.La commande est paramétrée.
Programmer une application SIMOTION12.4 Créer un programme d'exemple MCC : structure de base
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 91
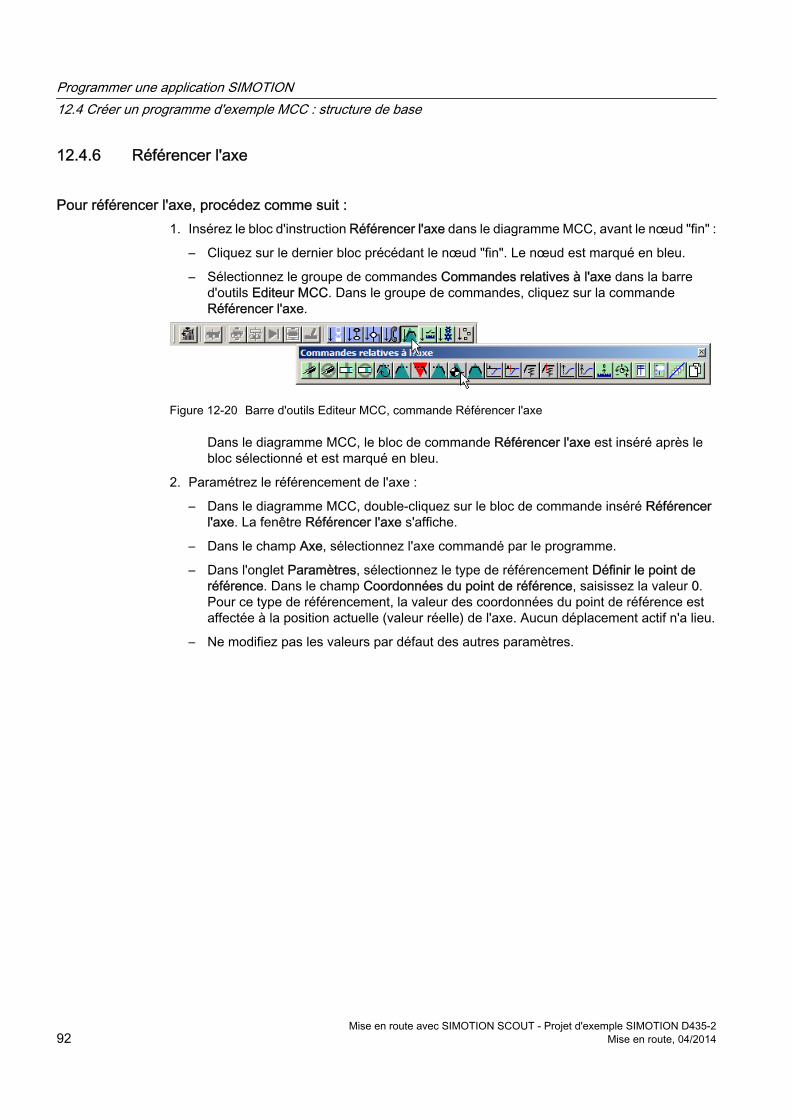
12.4.6 Référencer l'axe
Pour référencer l'axe, procédez comme suit :1. Insérez le bloc d'instruction Référencer l'axe dans le diagramme MCC, avant le nœud "fin" :
– Cliquez sur le dernier bloc précédant le nœud "fin". Le nœud est marqué en bleu.
– Sélectionnez le groupe de commandes Commandes relatives à l'axe dans la barre d'outils Editeur MCC. Dans le groupe de commandes, cliquez sur la commande Référencer l'axe.
Figure 12-20 Barre d'outils Editeur MCC, commande Référencer l'axe
Dans le diagramme MCC, le bloc de commande Référencer l'axe est inséré après le bloc sélectionné et est marqué en bleu.
2. Paramétrez le référencement de l'axe :
– Dans le diagramme MCC, double-cliquez sur le bloc de commande inséré Référencer l'axe. La fenêtre Référencer l'axe s'affiche.
– Dans le champ Axe, sélectionnez l'axe commandé par le programme.
– Dans l'onglet Paramètres, sélectionnez le type de référencement Définir le point de référence. Dans le champ Coordonnées du point de référence, saisissez la valeur 0.Pour ce type de référencement, la valeur des coordonnées du point de référence est affectée à la position actuelle (valeur réelle) de l'axe. Aucun déplacement actif n'a lieu.
– Ne modifiez pas les valeurs par défaut des autres paramètres.
Programmer une application SIMOTION12.4 Créer un programme d'exemple MCC : structure de base
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-292 Mise en route, 04/2014
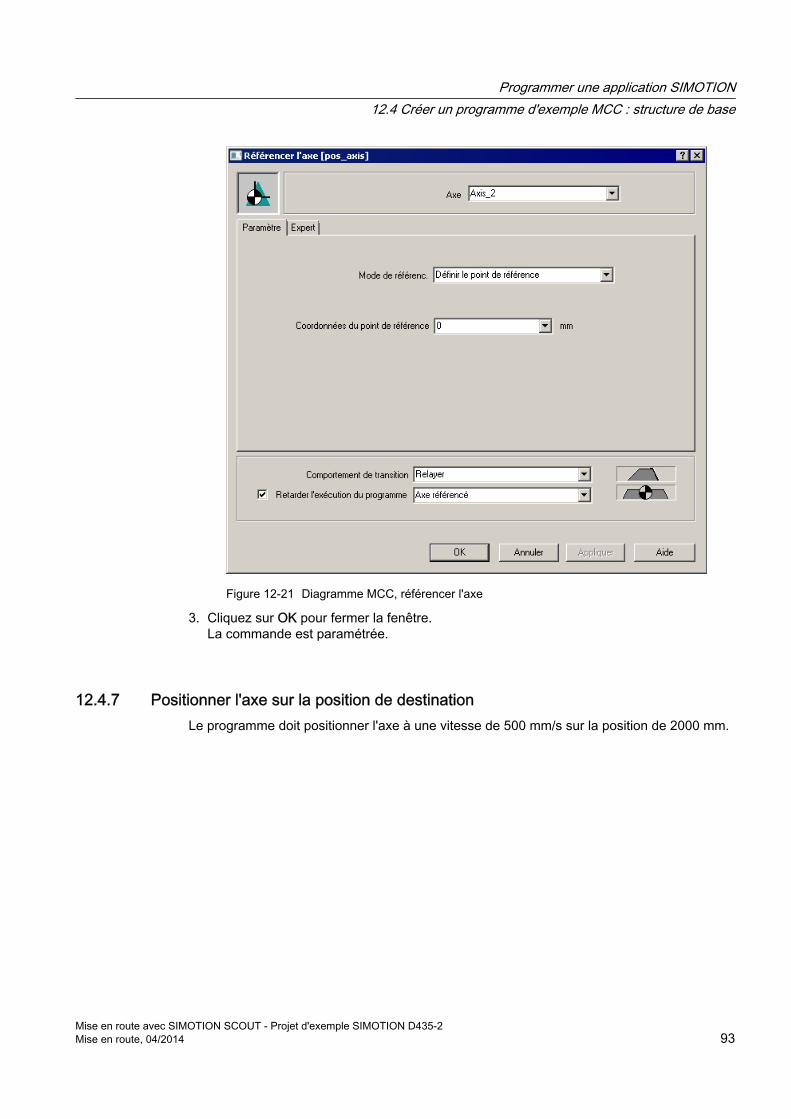
Figure 12-21 Diagramme MCC, référencer l'axe
3. Cliquez sur OK pour fermer la fenêtre.La commande est paramétrée.
12.4.7 Positionner l'axe sur la position de destinationLe programme doit positionner l'axe à une vitesse de 500 mm/s sur la position de 2000 mm.
Programmer une application SIMOTION12.4 Créer un programme d'exemple MCC : structure de base
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 93
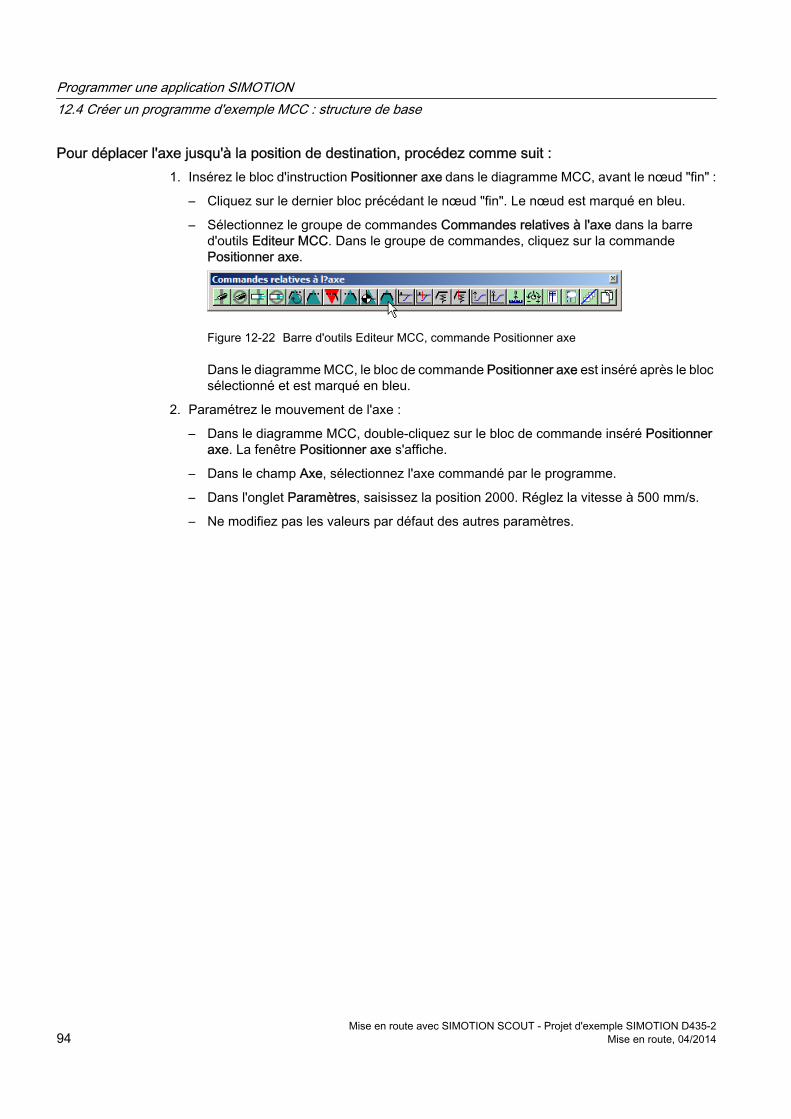
Pour déplacer l'axe jusqu'à la position de destination, procédez comme suit :1. Insérez le bloc d'instruction Positionner axe dans le diagramme MCC, avant le nœud "fin" :
– Cliquez sur le dernier bloc précédant le nœud "fin". Le nœud est marqué en bleu.
– Sélectionnez le groupe de commandes Commandes relatives à l'axe dans la barre d'outils Editeur MCC. Dans le groupe de commandes, cliquez sur la commande Positionner axe.
Figure 12-22 Barre d'outils Editeur MCC, commande Positionner axe
Dans le diagramme MCC, le bloc de commande Positionner axe est inséré après le bloc sélectionné et est marqué en bleu.
2. Paramétrez le mouvement de l'axe :
– Dans le diagramme MCC, double-cliquez sur le bloc de commande inséré Positionner axe. La fenêtre Positionner axe s'affiche.
– Dans le champ Axe, sélectionnez l'axe commandé par le programme.
– Dans l'onglet Paramètres, saisissez la position 2000. Réglez la vitesse à 500 mm/s.
– Ne modifiez pas les valeurs par défaut des autres paramètres.
Programmer une application SIMOTION12.4 Créer un programme d'exemple MCC : structure de base
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-294 Mise en route, 04/2014
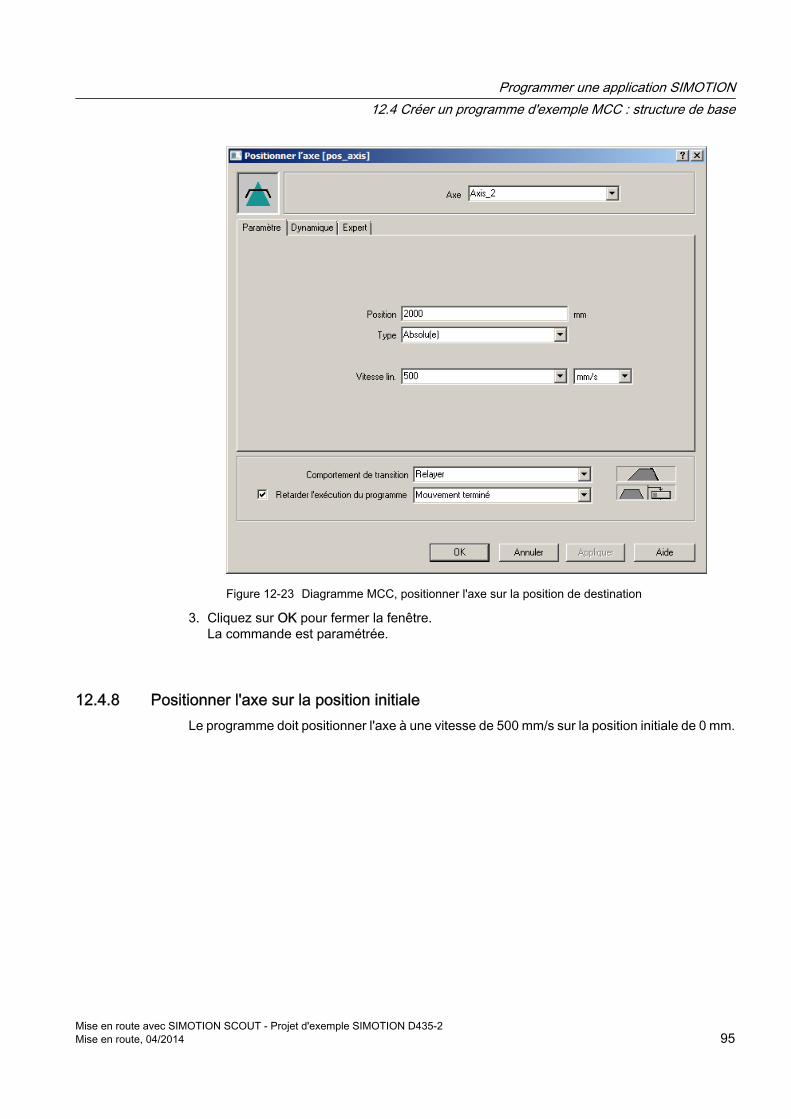
Figure 12-23 Diagramme MCC, positionner l'axe sur la position de destination
3. Cliquez sur OK pour fermer la fenêtre.La commande est paramétrée.
12.4.8 Positionner l'axe sur la position initialeLe programme doit positionner l'axe à une vitesse de 500 mm/s sur la position initiale de 0 mm.
Programmer une application SIMOTION12.4 Créer un programme d'exemple MCC : structure de base
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 95
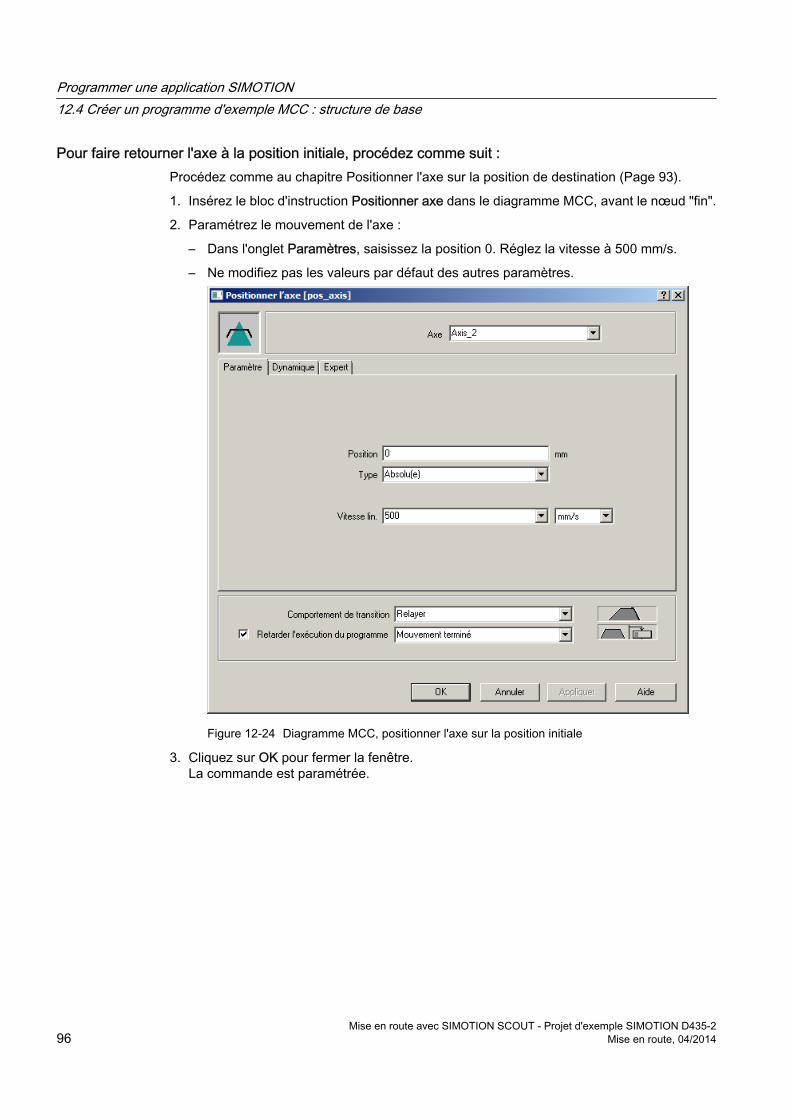
Pour faire retourner l'axe à la position initiale, procédez comme suit :Procédez comme au chapitre Positionner l'axe sur la position de destination (Page 93).
1. Insérez le bloc d'instruction Positionner axe dans le diagramme MCC, avant le nœud "fin".
2. Paramétrez le mouvement de l'axe :
– Dans l'onglet Paramètres, saisissez la position 0. Réglez la vitesse à 500 mm/s.
– Ne modifiez pas les valeurs par défaut des autres paramètres.
Figure 12-24 Diagramme MCC, positionner l'axe sur la position initiale
3. Cliquez sur OK pour fermer la fenêtre.La commande est paramétrée.
Programmer une application SIMOTION12.4 Créer un programme d'exemple MCC : structure de base
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-296 Mise en route, 04/2014
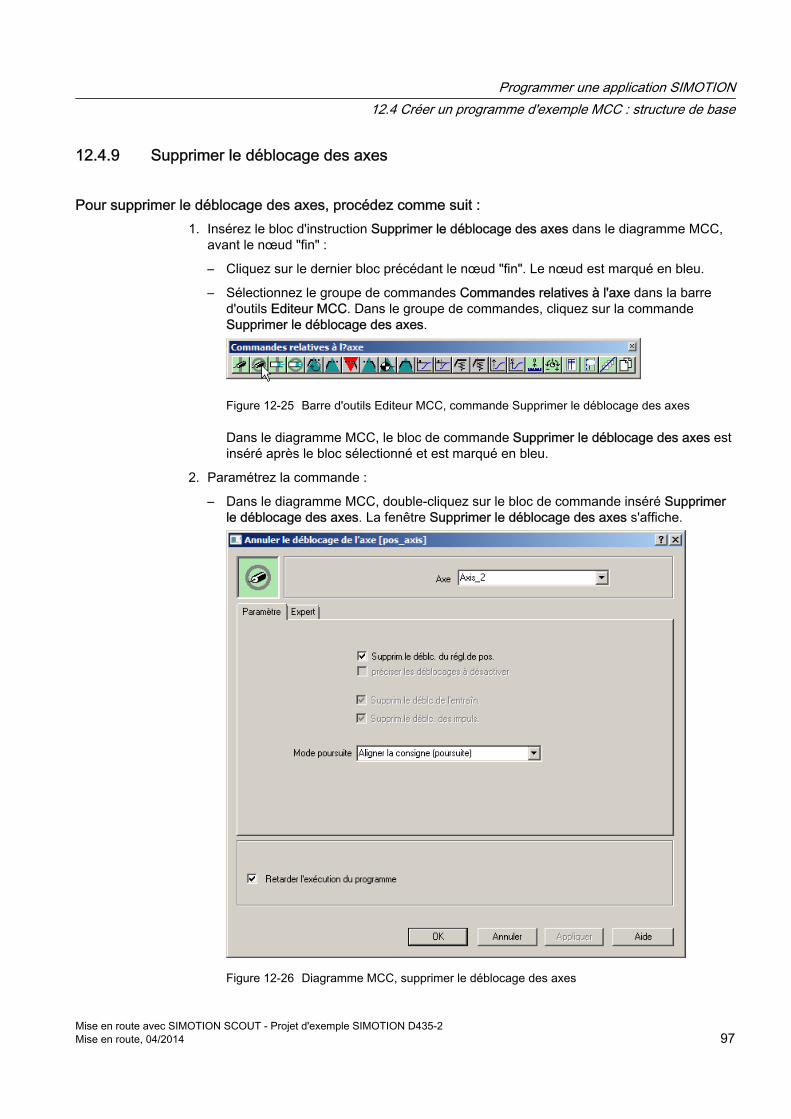
12.4.9 Supprimer le déblocage des axes
Pour supprimer le déblocage des axes, procédez comme suit :1. Insérez le bloc d'instruction Supprimer le déblocage des axes dans le diagramme MCC,
avant le nœud "fin" :
– Cliquez sur le dernier bloc précédant le nœud "fin". Le nœud est marqué en bleu.
– Sélectionnez le groupe de commandes Commandes relatives à l'axe dans la barre d'outils Editeur MCC. Dans le groupe de commandes, cliquez sur la commande Supprimer le déblocage des axes.
Figure 12-25 Barre d'outils Editeur MCC, commande Supprimer le déblocage des axes
Dans le diagramme MCC, le bloc de commande Supprimer le déblocage des axes est inséré après le bloc sélectionné et est marqué en bleu.
2. Paramétrez la commande :
– Dans le diagramme MCC, double-cliquez sur le bloc de commande inséré Supprimer le déblocage des axes. La fenêtre Supprimer le déblocage des axes s'affiche.
Figure 12-26 Diagramme MCC, supprimer le déblocage des axes
Programmer une application SIMOTION12.4 Créer un programme d'exemple MCC : structure de base
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 97
– Dans le champ Axe, sélectionnez l'axe commandé par le programme.
– Ne modifiez pas les valeurs par défaut des autres paramètres.
3. Cliquez sur OK pour fermer la fenêtre.La commande est paramétrée.
12.4.10 Affectation de variable g_bo_start:=falseLe mouvement de l'axe est terminé. La valeur FALSE est affectée à la variable g_bo_start.
Pour affecter la valeur FALSE à la variable g_bo_start, procédez comme suit :Procédez comme au chapitre Affectation de variable g_bo_start:=true (Page 88).
1. Insérez le bloc d'instruction Affectation des variables dans le diagramme MCC, avant le nœud "fin".
2. Affectez la valeur false à la variable g_bo_start.
3. Cliquez sur OK pour fermer la fenêtre.La commande est paramétrée.
12.4.11 Affectation de variable g_bo_ready:=trueLe mouvement de l'axe est terminé. La valeur TRUE est affectée à la variable g_bo_ready.
Pour affecter la valeur TRUE à la variable g_bo_ready, procédez comme suit :Procédez comme au chapitre Affectation de variable g_bo_ready:=false (Page 86).
1. Insérez le bloc d'instruction Affectation des variables dans le diagramme MCC, avant le nœud "fin".
2. Affectez la valeur true à la variable g_bo_ready.
3. Cliquez sur OK pour fermer la fenêtre.La commande est paramétrée.
12.5 Etendre le programme d'exemple MCC : commande de l'alimentation
12.5.1 Exécution du programmeSi vous utilisez une alimentation avec interface DRIVE-CLiQ, la commande programmée doit activer l'alimentation avant que les commandes d'axe ne puissent être émises. La séquence de programme représentée ci-dessous accomplit cette tâche. Le programme pos_axis créé jusqu'à présent doit être étendu en conséquence.
Programmer une application SIMOTION12.5 Etendre le programme d'exemple MCC : commande de l'alimentation
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-298 Mise en route, 04/2014
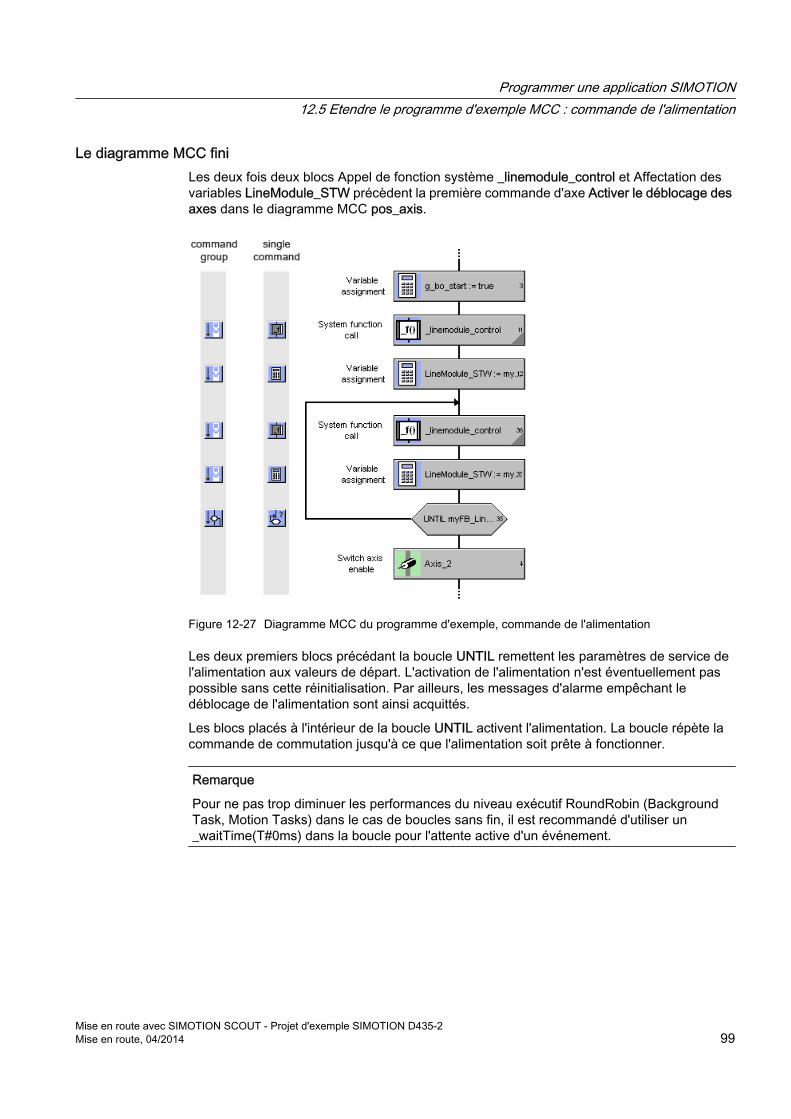
Le diagramme MCC finiLes deux fois deux blocs Appel de fonction système _linemodule_control et Affectation des variables LineModule_STW précèdent la première commande d'axe Activer le déblocage des axes dans le diagramme MCC pos_axis.
Figure 12-27 Diagramme MCC du programme d'exemple, commande de l'alimentation
Les deux premiers blocs précédant la boucle UNTIL remettent les paramètres de service de l'alimentation aux valeurs de départ. L'activation de l'alimentation n'est éventuellement pas possible sans cette réinitialisation. Par ailleurs, les messages d'alarme empêchant le déblocage de l'alimentation sont ainsi acquittés.
Les blocs placés à l'intérieur de la boucle UNTIL activent l'alimentation. La boucle répète la commande de commutation jusqu'à ce que l'alimentation soit prête à fonctionner.
Remarque
Pour ne pas trop diminuer les performances du niveau exécutif RoundRobin (Background Task, Motion Tasks) dans le cas de boucles sans fin, il est recommandé d'utiliser un _waitTime(T#0ms) dans la boucle pour l'attente active d'un événement.
Programmer une application SIMOTION12.5 Etendre le programme d'exemple MCC : commande de l'alimentation
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 99
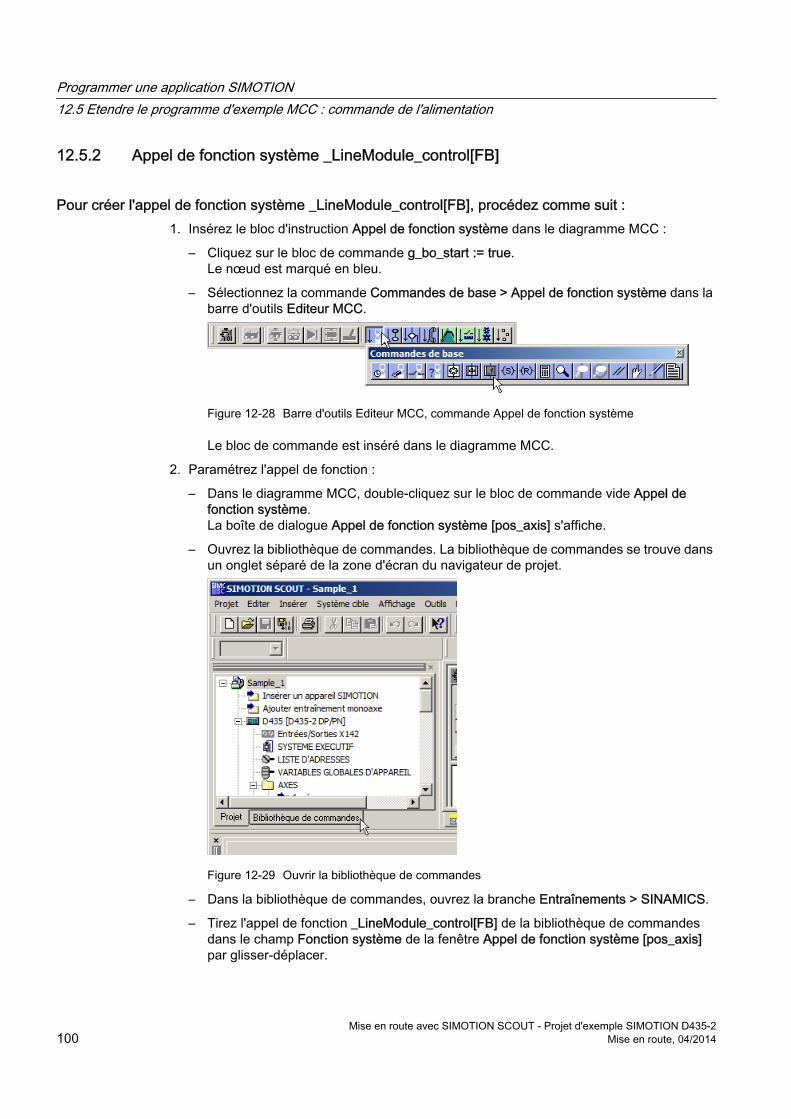
12.5.2 Appel de fonction système _LineModule_control[FB]
Pour créer l'appel de fonction système _LineModule_control[FB], procédez comme suit :1. Insérez le bloc d'instruction Appel de fonction système dans le diagramme MCC :
– Cliquez sur le bloc de commande g_bo_start := true.Le nœud est marqué en bleu.
– Sélectionnez la commande Commandes de base > Appel de fonction système dans la barre d'outils Editeur MCC.
Figure 12-28 Barre d'outils Editeur MCC, commande Appel de fonction système
Le bloc de commande est inséré dans le diagramme MCC.
2. Paramétrez l'appel de fonction :
– Dans le diagramme MCC, double-cliquez sur le bloc de commande vide Appel de fonction système.La boîte de dialogue Appel de fonction système [pos_axis] s'affiche.
– Ouvrez la bibliothèque de commandes. La bibliothèque de commandes se trouve dans un onglet séparé de la zone d'écran du navigateur de projet.
Figure 12-29 Ouvrir la bibliothèque de commandes
– Dans la bibliothèque de commandes, ouvrez la branche Entraînements > SINAMICS.
– Tirez l'appel de fonction _LineModule_control[FB] de la bibliothèque de commandes dans le champ Fonction système de la fenêtre Appel de fonction système [pos_axis] par glisser-déplacer.
Programmer une application SIMOTION12.5 Etendre le programme d'exemple MCC : commande de l'alimentation
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2100 Mise en route, 04/2014
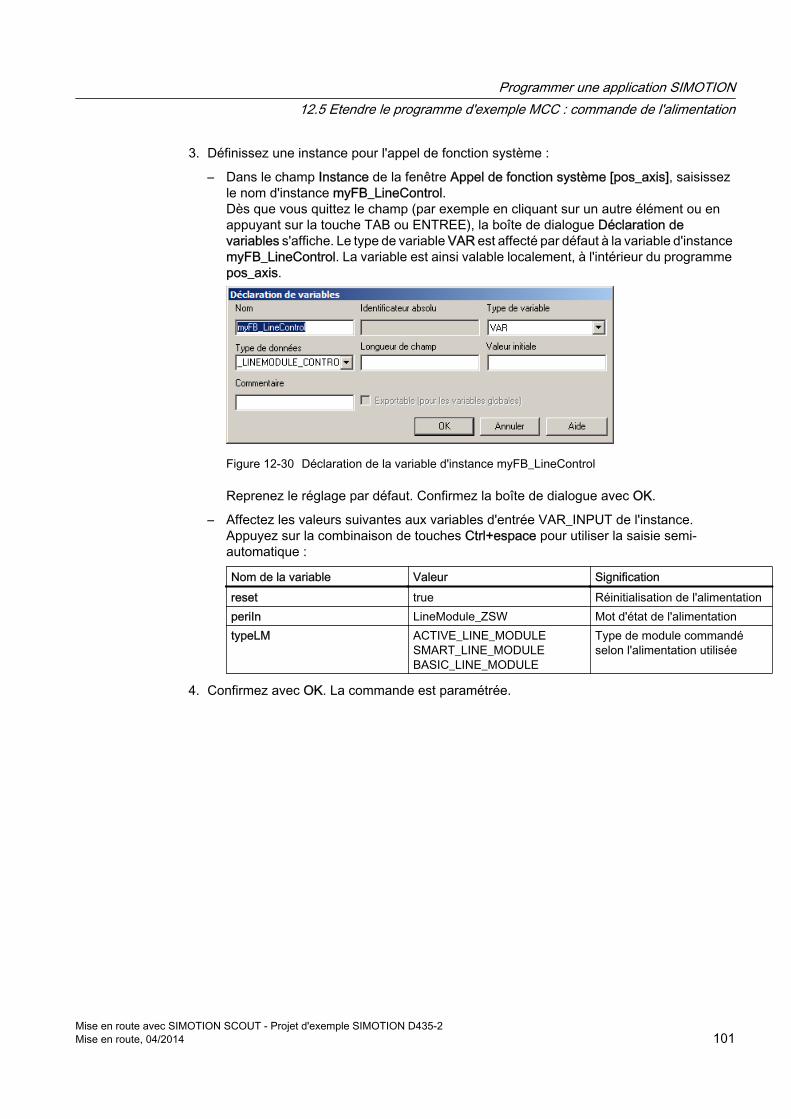
3. Définissez une instance pour l'appel de fonction système :
– Dans le champ Instance de la fenêtre Appel de fonction système [pos_axis], saisissez le nom d'instance myFB_LineControl. Dès que vous quittez le champ (par exemple en cliquant sur un autre élément ou en appuyant sur la touche TAB ou ENTREE), la boîte de dialogue Déclaration de variables s'affiche. Le type de variable VAR est affecté par défaut à la variable d'instance myFB_LineControl. La variable est ainsi valable localement, à l'intérieur du programme pos_axis.
Figure 12-30 Déclaration de la variable d'instance myFB_LineControl
Reprenez le réglage par défaut. Confirmez la boîte de dialogue avec OK.
– Affectez les valeurs suivantes aux variables d'entrée VAR_INPUT de l'instance. Appuyez sur la combinaison de touches Ctrl+espace pour utiliser la saisie semi-automatique :
Nom de la variable Valeur Significationreset true Réinitialisation de l'alimentationperiIn LineModule_ZSW Mot d'état de l'alimentationtypeLM ACTIVE_LINE_MODULE
SMART_LINE_MODULEBASIC_LINE_MODULE
Type de module commandé selon l'alimentation utilisée
4. Confirmez avec OK. La commande est paramétrée.
Programmer une application SIMOTION12.5 Etendre le programme d'exemple MCC : commande de l'alimentation
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 101
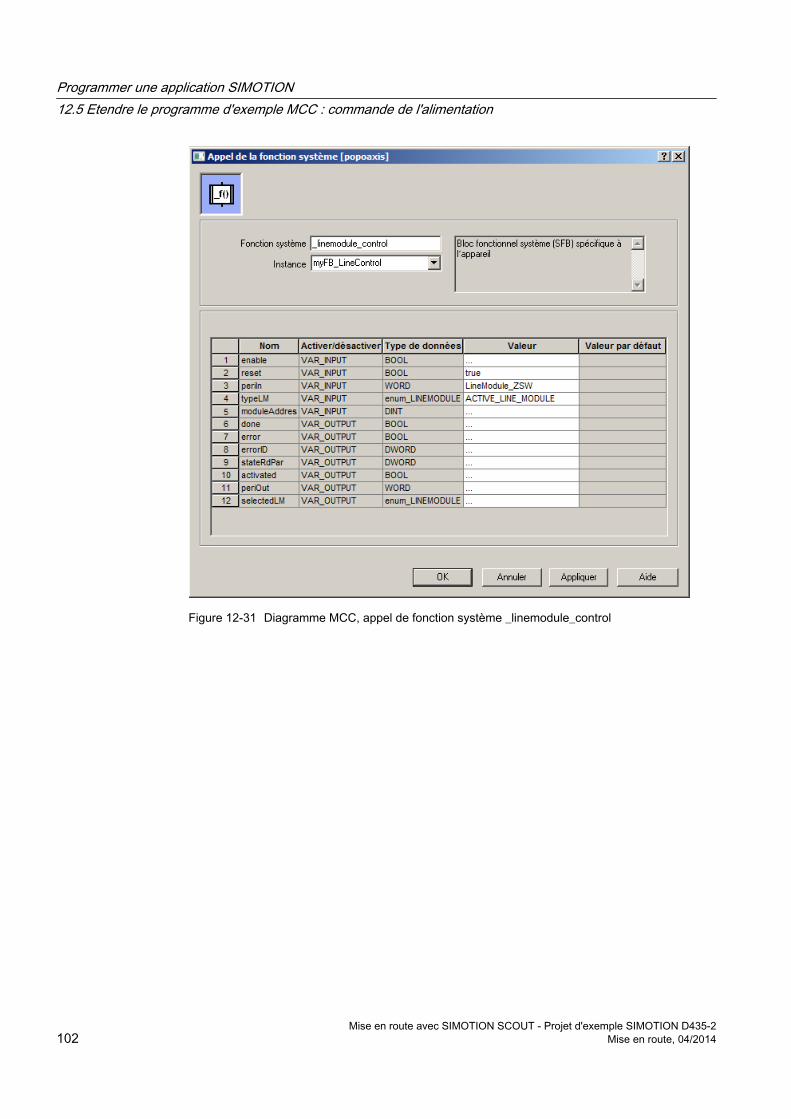
Figure 12-31 Diagramme MCC, appel de fonction système _linemodule_control
Programmer une application SIMOTION12.5 Etendre le programme d'exemple MCC : commande de l'alimentation
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2102 Mise en route, 04/2014
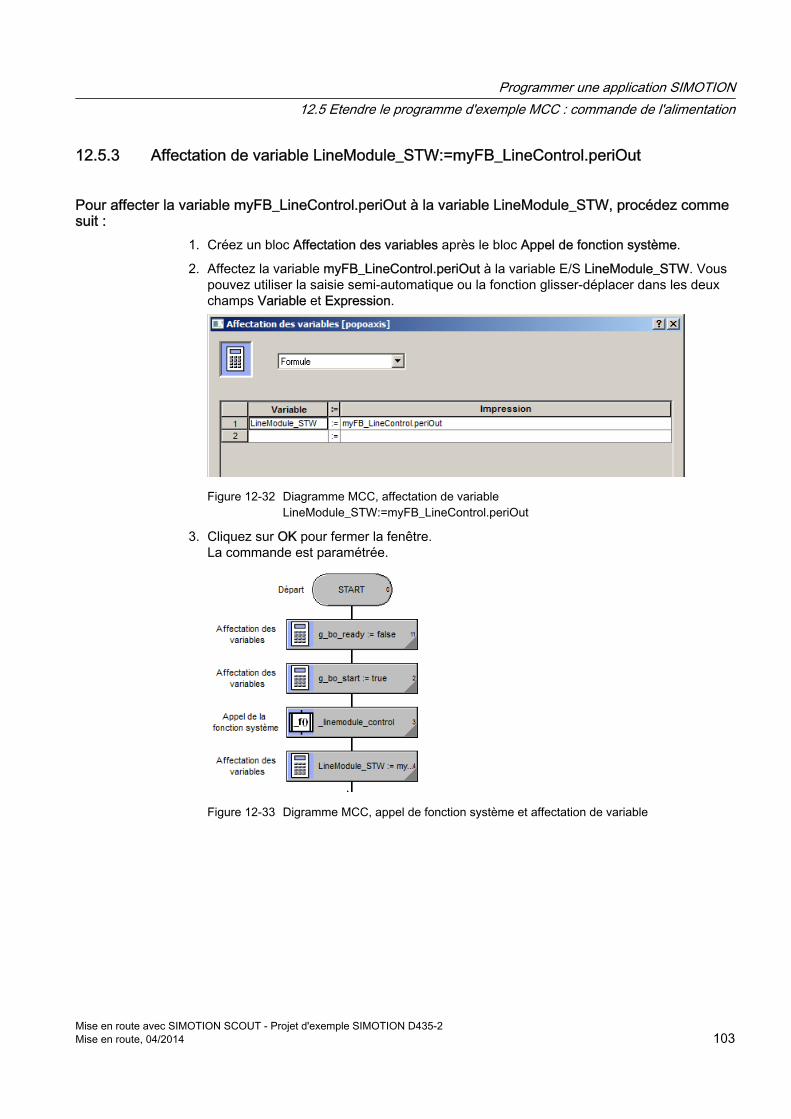
12.5.3 Affectation de variable LineModule_STW:=myFB_LineControl.periOut
Pour affecter la variable myFB_LineControl.periOut à la variable LineModule_STW, procédez comme suit :
1. Créez un bloc Affectation des variables après le bloc Appel de fonction système.
2. Affectez la variable myFB_LineControl.periOut à la variable E/S LineModule_STW. Vous pouvez utiliser la saisie semi-automatique ou la fonction glisser-déplacer dans les deux champs Variable et Expression.
Figure 12-32 Diagramme MCC, affectation de variable LineModule_STW:=myFB_LineControl.periOut
3. Cliquez sur OK pour fermer la fenêtre.La commande est paramétrée.
Figure 12-33 Digramme MCC, appel de fonction système et affectation de variable
Programmer une application SIMOTION12.5 Etendre le programme d'exemple MCC : commande de l'alimentation
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 103
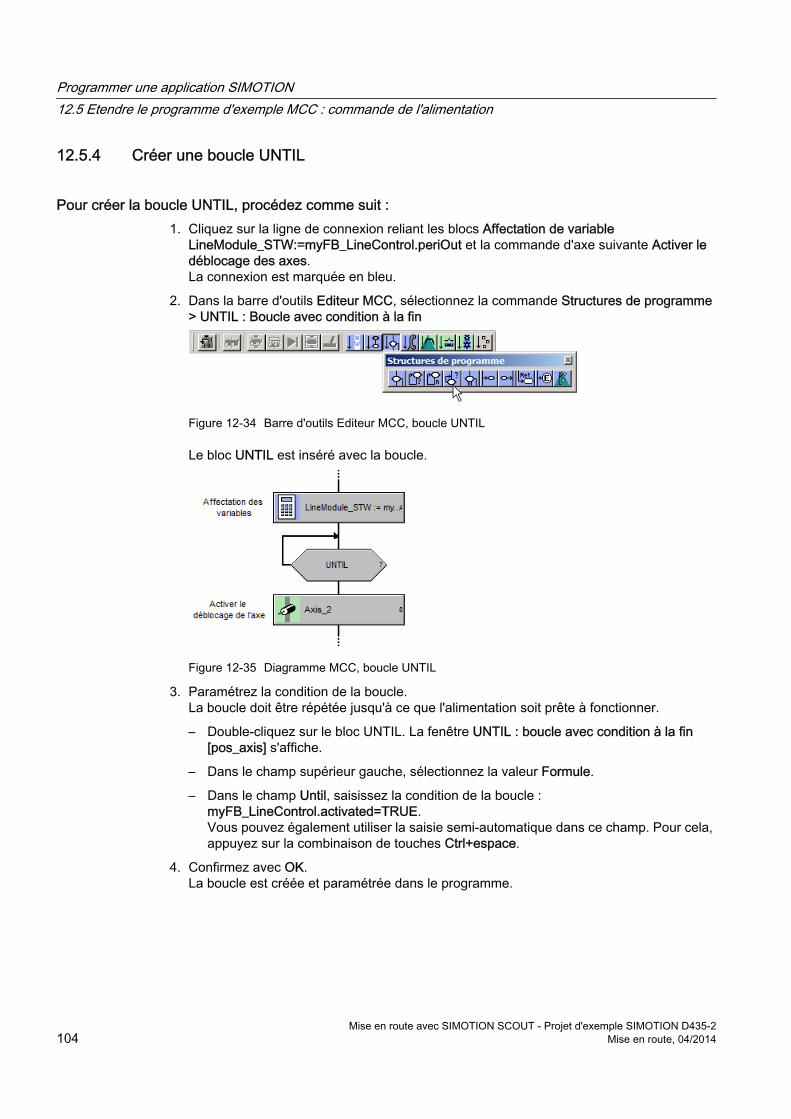
12.5.4 Créer une boucle UNTIL
Pour créer la boucle UNTIL, procédez comme suit :1. Cliquez sur la ligne de connexion reliant les blocs Affectation de variable
LineModule_STW:=myFB_LineControl.periOut et la commande d'axe suivante Activer le déblocage des axes.La connexion est marquée en bleu.
2. Dans la barre d'outils Editeur MCC, sélectionnez la commande Structures de programme > UNTIL : Boucle avec condition à la fin
Figure 12-34 Barre d'outils Editeur MCC, boucle UNTIL
Le bloc UNTIL est inséré avec la boucle.
Figure 12-35 Diagramme MCC, boucle UNTIL
3. Paramétrez la condition de la boucle.La boucle doit être répétée jusqu'à ce que l'alimentation soit prête à fonctionner.
– Double-cliquez sur le bloc UNTIL. La fenêtre UNTIL : boucle avec condition à la fin [pos_axis] s'affiche.
– Dans le champ supérieur gauche, sélectionnez la valeur Formule.
– Dans le champ Until, saisissez la condition de la boucle : myFB_LineControl.activated=TRUE.Vous pouvez également utiliser la saisie semi-automatique dans ce champ. Pour cela, appuyez sur la combinaison de touches Ctrl+espace.
4. Confirmez avec OK.La boucle est créée et paramétrée dans le programme.
Programmer une application SIMOTION12.5 Etendre le programme d'exemple MCC : commande de l'alimentation
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2104 Mise en route, 04/2014
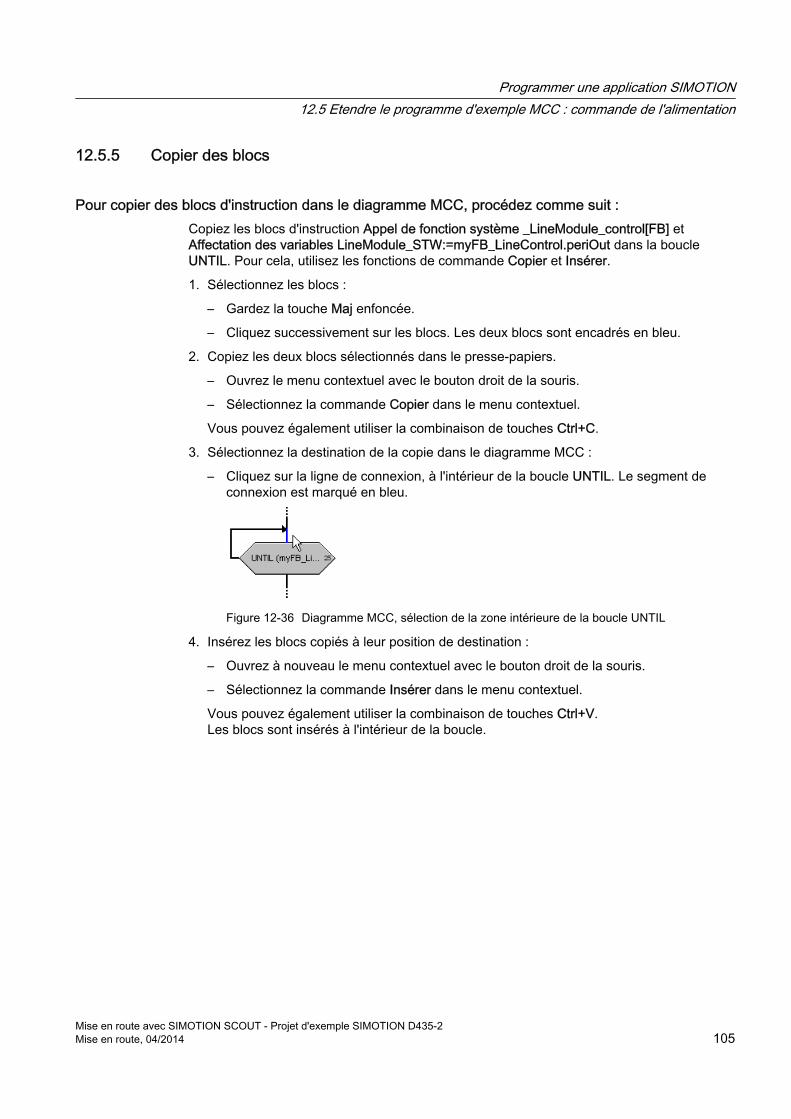
12.5.5 Copier des blocs
Pour copier des blocs d'instruction dans le diagramme MCC, procédez comme suit :Copiez les blocs d'instruction Appel de fonction système _LineModule_control[FB] et Affectation des variables LineModule_STW:=myFB_LineControl.periOut dans la boucle UNTIL. Pour cela, utilisez les fonctions de commande Copier et Insérer.
1. Sélectionnez les blocs :
– Gardez la touche Maj enfoncée.
– Cliquez successivement sur les blocs. Les deux blocs sont encadrés en bleu.
2. Copiez les deux blocs sélectionnés dans le presse-papiers.
– Ouvrez le menu contextuel avec le bouton droit de la souris.
– Sélectionnez la commande Copier dans le menu contextuel.
Vous pouvez également utiliser la combinaison de touches Ctrl+C.
3. Sélectionnez la destination de la copie dans le diagramme MCC :
– Cliquez sur la ligne de connexion, à l'intérieur de la boucle UNTIL. Le segment de connexion est marqué en bleu.
Figure 12-36 Diagramme MCC, sélection de la zone intérieure de la boucle UNTIL
4. Insérez les blocs copiés à leur position de destination :
– Ouvrez à nouveau le menu contextuel avec le bouton droit de la souris.
– Sélectionnez la commande Insérer dans le menu contextuel.
Vous pouvez également utiliser la combinaison de touches Ctrl+V.Les blocs sont insérés à l'intérieur de la boucle.
Programmer une application SIMOTION12.5 Etendre le programme d'exemple MCC : commande de l'alimentation
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 105
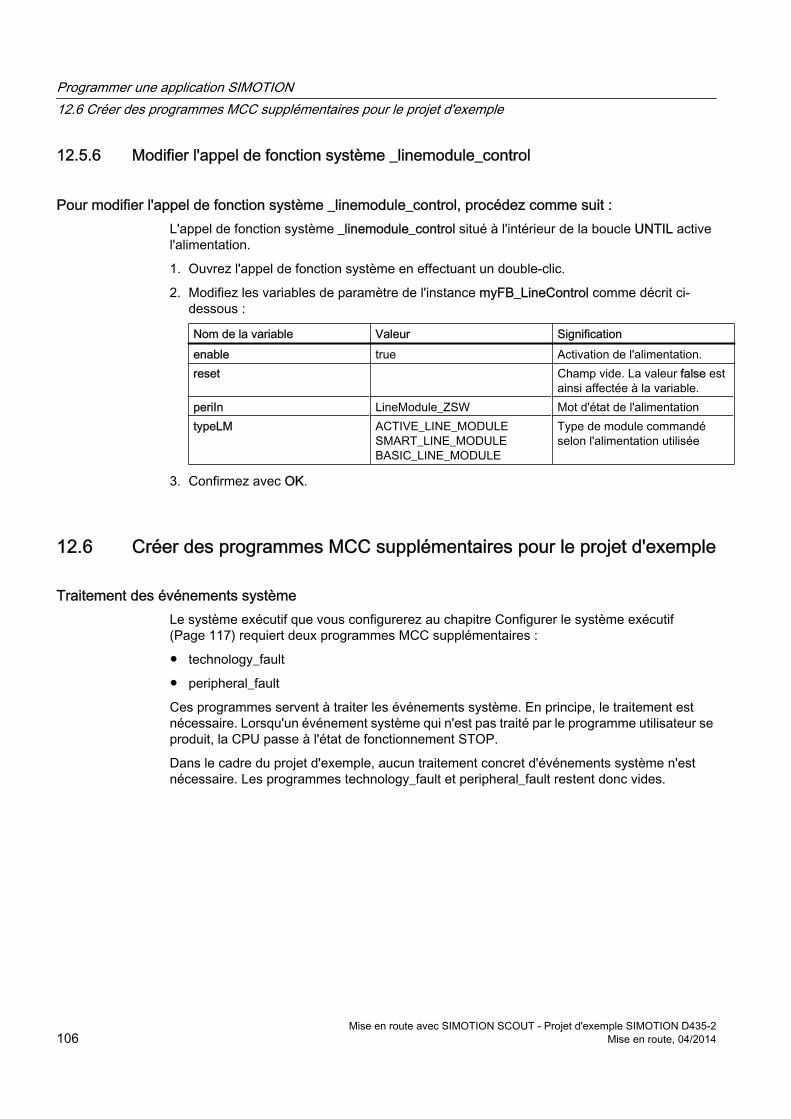
12.5.6 Modifier l'appel de fonction système _linemodule_control
Pour modifier l'appel de fonction système _linemodule_control, procédez comme suit :L'appel de fonction système _linemodule_control situé à l'intérieur de la boucle UNTIL active l'alimentation.
1. Ouvrez l'appel de fonction système en effectuant un double-clic.
2. Modifiez les variables de paramètre de l'instance myFB_LineControl comme décrit ci-dessous :
Nom de la variable Valeur Significationenable true Activation de l'alimentation.reset Champ vide. La valeur false est
ainsi affectée à la variable.periIn LineModule_ZSW Mot d'état de l'alimentationtypeLM ACTIVE_LINE_MODULE
SMART_LINE_MODULEBASIC_LINE_MODULE
Type de module commandé selon l'alimentation utilisée
3. Confirmez avec OK.
12.6 Créer des programmes MCC supplémentaires pour le projet d'exemple
Traitement des événements systèmeLe système exécutif que vous configurerez au chapitre Configurer le système exécutif (Page 117) requiert deux programmes MCC supplémentaires :
● technology_fault
● peripheral_fault
Ces programmes servent à traiter les événements système. En principe, le traitement est nécessaire. Lorsqu'un événement système qui n'est pas traité par le programme utilisateur se produit, la CPU passe à l'état de fonctionnement STOP.
Dans le cadre du projet d'exemple, aucun traitement concret d'événements système n'est nécessaire. Les programmes technology_fault et peripheral_fault restent donc vides.
Programmer une application SIMOTION12.6 Créer des programmes MCC supplémentaires pour le projet d'exemple
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2106 Mise en route, 04/2014
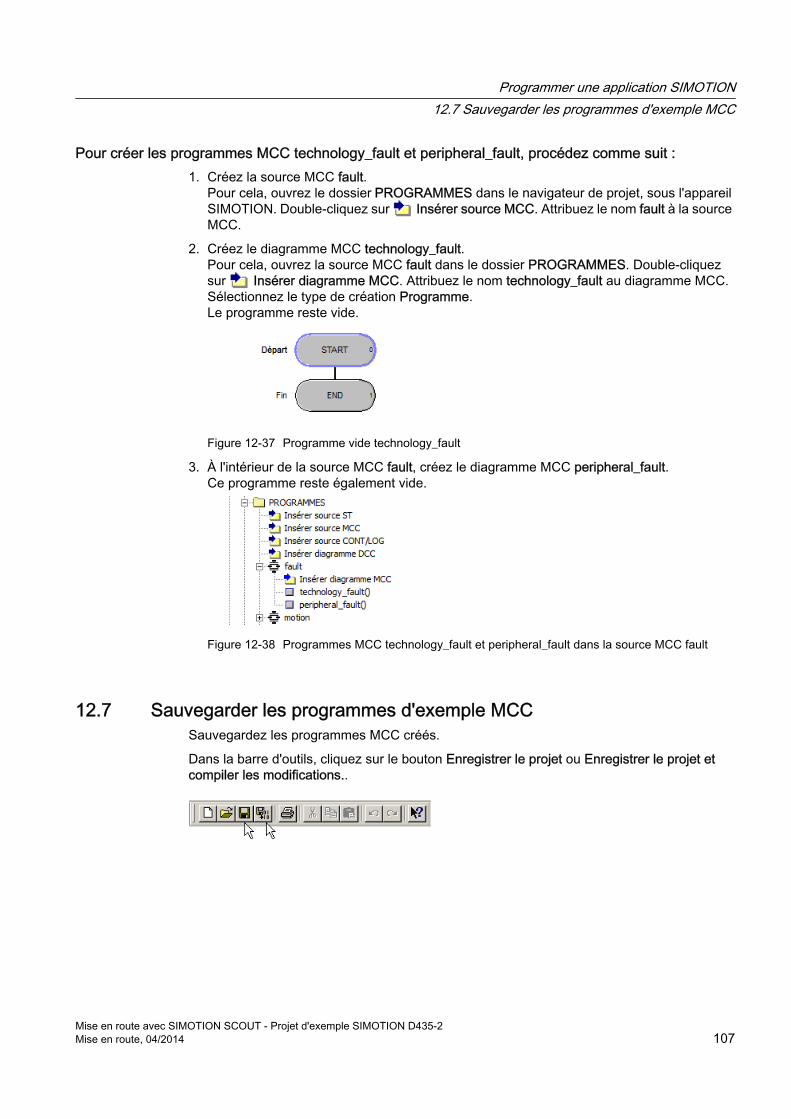
Pour créer les programmes MCC technology_fault et peripheral_fault, procédez comme suit :1. Créez la source MCC fault.
Pour cela, ouvrez le dossier PROGRAMMES dans le navigateur de projet, sous l'appareil SIMOTION. Double-cliquez sur Insérer source MCC. Attribuez le nom fault à la source MCC.
2. Créez le diagramme MCC technology_fault.Pour cela, ouvrez la source MCC fault dans le dossier PROGRAMMES. Double-cliquez sur Insérer diagramme MCC. Attribuez le nom technology_fault au diagramme MCC. Sélectionnez le type de création Programme.Le programme reste vide.
Figure 12-37 Programme vide technology_fault
3. À l'intérieur de la source MCC fault, créez le diagramme MCC peripheral_fault.Ce programme reste également vide.
Figure 12-38 Programmes MCC technology_fault et peripheral_fault dans la source MCC fault
12.7 Sauvegarder les programmes d'exemple MCCSauvegardez les programmes MCC créés.
Dans la barre d'outils, cliquez sur le bouton Enregistrer le projet ou Enregistrer le projet et compiler les modifications..
Programmer une application SIMOTION12.7 Sauvegarder les programmes d'exemple MCC
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 107
Information complémentaireOutre la commande Enregistrer le projet et compiler les modifications, vous disposez de la commande Appliquer et compiler dans la barre d'outils Editeur MCC.
Cette commande compile le programme sélectionné ainsi que tous les autres programmes de la même source.
La commande n'enregistre toutefois pas les modifications.
Cela vous permet d'appliquer les modifications d'un programme au projet sans devoir à nouveau enregistrer ou compiler l'ensemble du projet.
12.8 CONT/LOG - Schéma à contacts/logigramme
12.8.1 Les langages de programmation CONT et LOG
CONT (schéma à contacts)CONT signifie schéma à contacts. CONT est un langage de programmation graphique. La syntaxe des instructions correspond à un schéma de raccordement. CONT vous permet de suivre facilement les flux de signaux entre les barres conductrices via les entrées, les sorties et les opérations. Les instructions CONT sont composées d'éléments et de blocs, reliés entre eux de manière graphique pour former des réseaux. Les opérations CONT fonctionnent selon les règles de la logique booléenne.
LOG (logigramme)LOG signifie logigramme. LOG est un langage de programmation graphique. Il utilise les boîtes standard de l'algèbre booléenne pour représenter la logique. Il est également possible de représenter des fonctions complexes (par exemple des fonctions mathématiques) en association directe avec les boîtes logiques.
Systématique dans SIMOTION SCOUTLe dossier PROGRAMMES situé sous l'appareil SIMOTION contient les sources CONT/LOG créées dans le projet.
Une source CONT/LOG contient les programmes CONT/LOG devant être exécutés sur l'appareil SIMOTION. Une source CONT/LOG peut comprendre plusieurs programmes CONT/LOG.
"Programme CONT/LOG" est un terme général pour différentes unités d'organisation de programme.
Programmer une application SIMOTION12.8 CONT/LOG - Schéma à contacts/logigramme
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2108 Mise en route, 04/2014
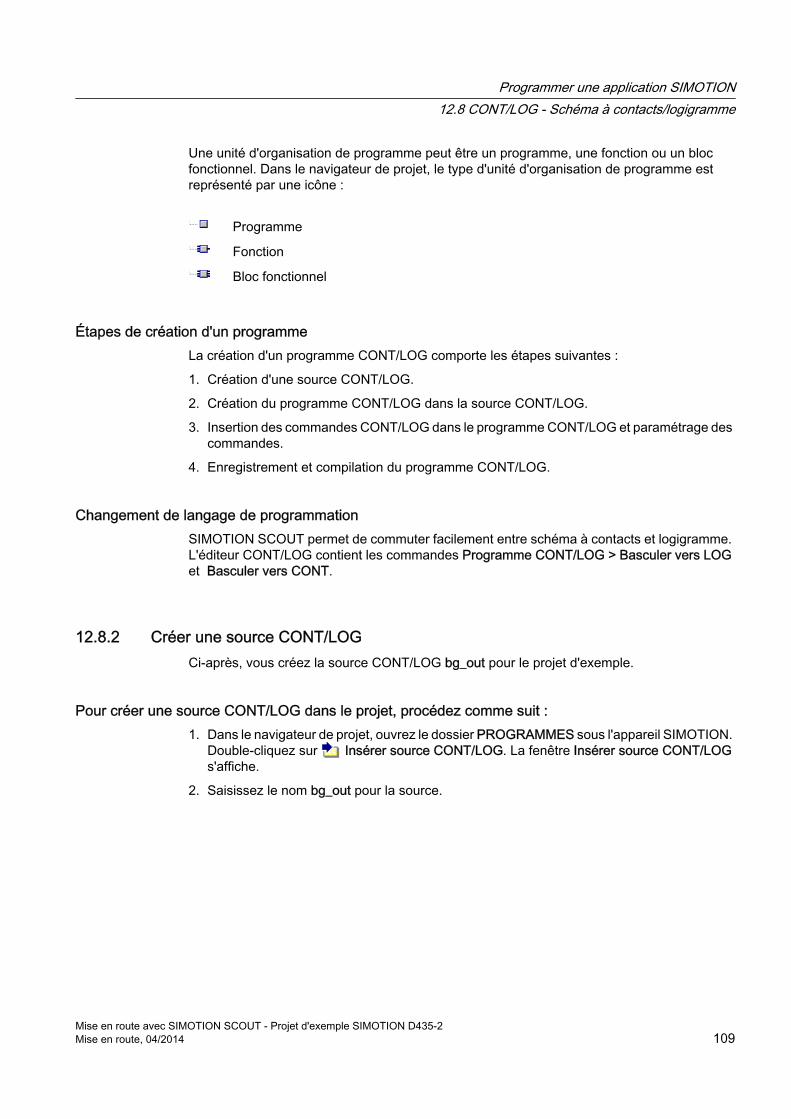
Une unité d'organisation de programme peut être un programme, une fonction ou un bloc fonctionnel. Dans le navigateur de projet, le type d'unité d'organisation de programme est représenté par une icône :
Programme
Fonction
Bloc fonctionnel
Étapes de création d'un programmeLa création d'un programme CONT/LOG comporte les étapes suivantes :
1. Création d'une source CONT/LOG.
2. Création du programme CONT/LOG dans la source CONT/LOG.
3. Insertion des commandes CONT/LOG dans le programme CONT/LOG et paramétrage des commandes.
4. Enregistrement et compilation du programme CONT/LOG.
Changement de langage de programmationSIMOTION SCOUT permet de commuter facilement entre schéma à contacts et logigramme. L'éditeur CONT/LOG contient les commandes Programme CONT/LOG > Basculer vers LOG et Basculer vers CONT.
12.8.2 Créer une source CONT/LOGCi-après, vous créez la source CONT/LOG bg_out pour le projet d'exemple.
Pour créer une source CONT/LOG dans le projet, procédez comme suit :1. Dans le navigateur de projet, ouvrez le dossier PROGRAMMES sous l'appareil SIMOTION.
Double-cliquez sur Insérer source CONT/LOG. La fenêtre Insérer source CONT/LOG s'affiche.
2. Saisissez le nom bg_out pour la source.
Programmer une application SIMOTION12.8 CONT/LOG - Schéma à contacts/logigramme
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 109
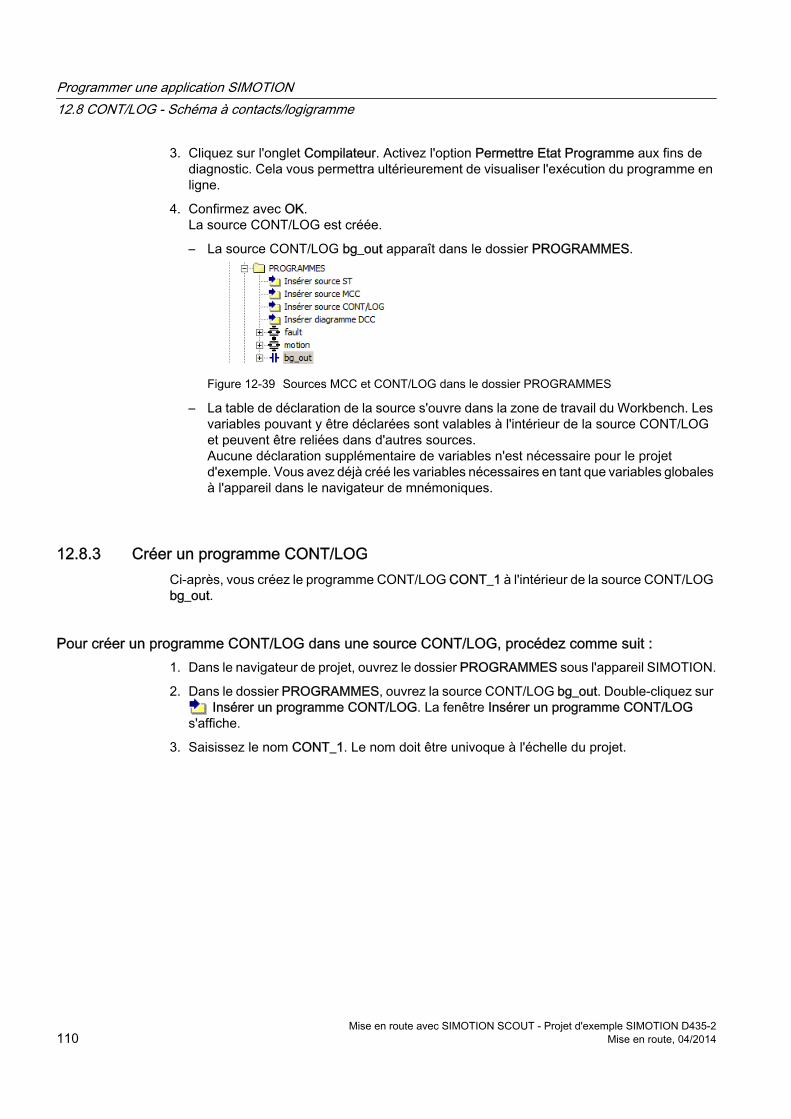
3. Cliquez sur l'onglet Compilateur. Activez l'option Permettre Etat Programme aux fins de diagnostic. Cela vous permettra ultérieurement de visualiser l'exécution du programme en ligne.
4. Confirmez avec OK.La source CONT/LOG est créée.
– La source CONT/LOG bg_out apparaît dans le dossier PROGRAMMES.
Figure 12-39 Sources MCC et CONT/LOG dans le dossier PROGRAMMES
– La table de déclaration de la source s'ouvre dans la zone de travail du Workbench. Les variables pouvant y être déclarées sont valables à l'intérieur de la source CONT/LOG et peuvent être reliées dans d'autres sources.Aucune déclaration supplémentaire de variables n'est nécessaire pour le projet d'exemple. Vous avez déjà créé les variables nécessaires en tant que variables globales à l'appareil dans le navigateur de mnémoniques.
12.8.3 Créer un programme CONT/LOGCi-après, vous créez le programme CONT/LOG CONT_1 à l'intérieur de la source CONT/LOG bg_out.
Pour créer un programme CONT/LOG dans une source CONT/LOG, procédez comme suit :1. Dans le navigateur de projet, ouvrez le dossier PROGRAMMES sous l'appareil SIMOTION.
2. Dans le dossier PROGRAMMES, ouvrez la source CONT/LOG bg_out. Double-cliquez sur Insérer un programme CONT/LOG. La fenêtre Insérer un programme CONT/LOG
s'affiche.
3. Saisissez le nom CONT_1. Le nom doit être univoque à l'échelle du projet.
Programmer une application SIMOTION12.8 CONT/LOG - Schéma à contacts/logigramme
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2110 Mise en route, 04/2014
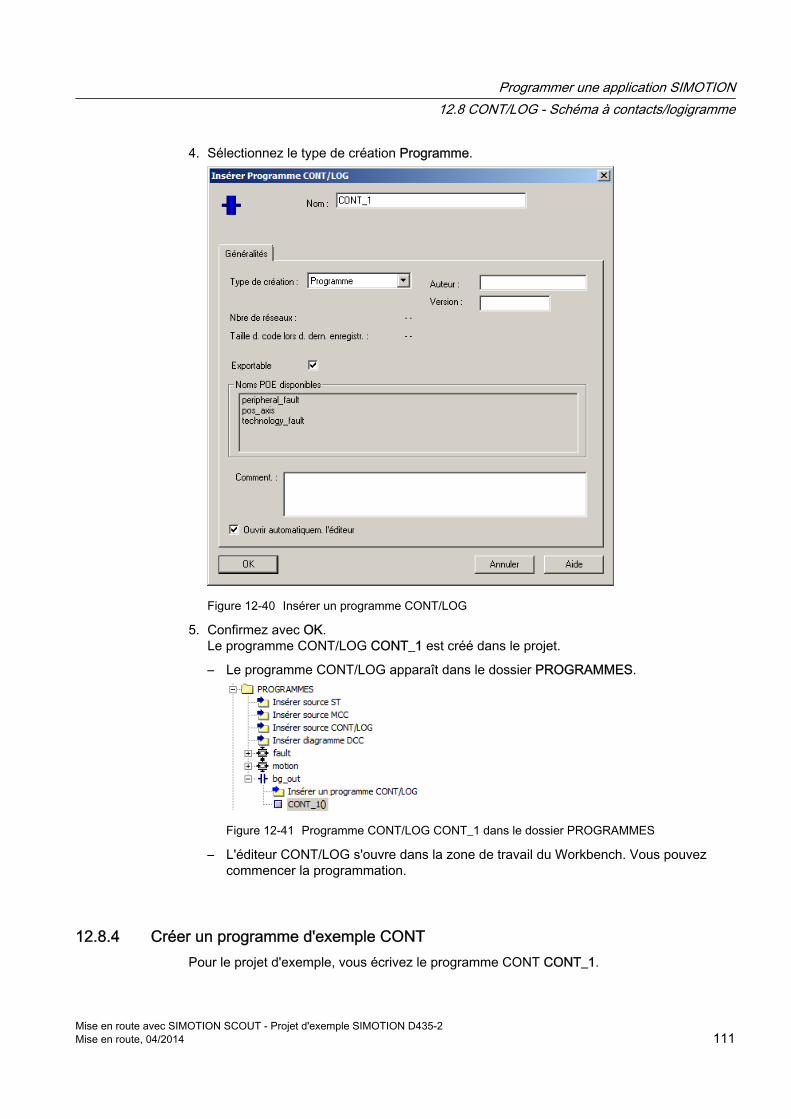
4. Sélectionnez le type de création Programme.
Figure 12-40 Insérer un programme CONT/LOG
5. Confirmez avec OK.Le programme CONT/LOG CONT_1 est créé dans le projet.
– Le programme CONT/LOG apparaît dans le dossier PROGRAMMES.
Figure 12-41 Programme CONT/LOG CONT_1 dans le dossier PROGRAMMES
– L'éditeur CONT/LOG s'ouvre dans la zone de travail du Workbench. Vous pouvez commencer la programmation.
12.8.4 Créer un programme d'exemple CONTPour le projet d'exemple, vous écrivez le programme CONT CONT_1.
Programmer une application SIMOTION12.8 CONT/LOG - Schéma à contacts/logigramme
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 111
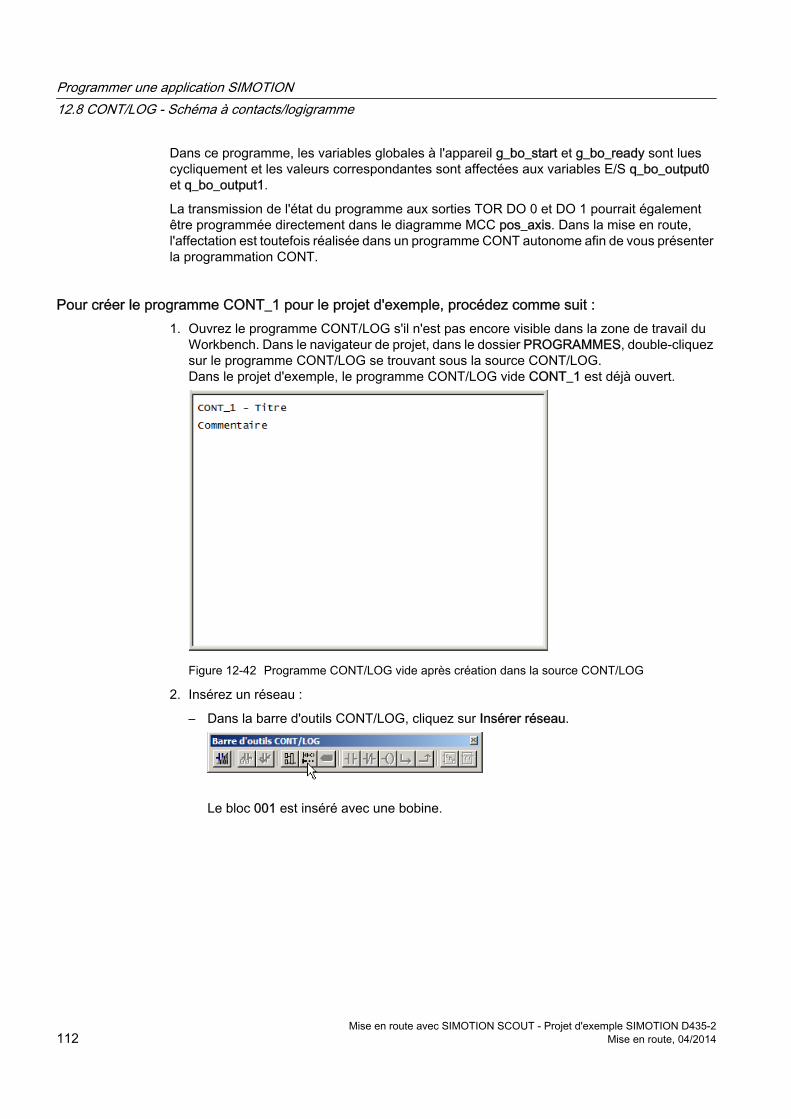
Dans ce programme, les variables globales à l'appareil g_bo_start et g_bo_ready sont lues cycliquement et les valeurs correspondantes sont affectées aux variables E/S q_bo_output0 et q_bo_output1.
La transmission de l'état du programme aux sorties TOR DO 0 et DO 1 pourrait également être programmée directement dans le diagramme MCC pos_axis. Dans la mise en route, l'affectation est toutefois réalisée dans un programme CONT autonome afin de vous présenter la programmation CONT.
Pour créer le programme CONT_1 pour le projet d'exemple, procédez comme suit :1. Ouvrez le programme CONT/LOG s'il n'est pas encore visible dans la zone de travail du
Workbench. Dans le navigateur de projet, dans le dossier PROGRAMMES, double-cliquez sur le programme CONT/LOG se trouvant sous la source CONT/LOG.Dans le projet d'exemple, le programme CONT/LOG vide CONT_1 est déjà ouvert.
Figure 12-42 Programme CONT/LOG vide après création dans la source CONT/LOG
2. Insérez un réseau :
– Dans la barre d'outils CONT/LOG, cliquez sur Insérer réseau.
Le bloc 001 est inséré avec une bobine.
Programmer une application SIMOTION12.8 CONT/LOG - Schéma à contacts/logigramme
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2112 Mise en route, 04/2014
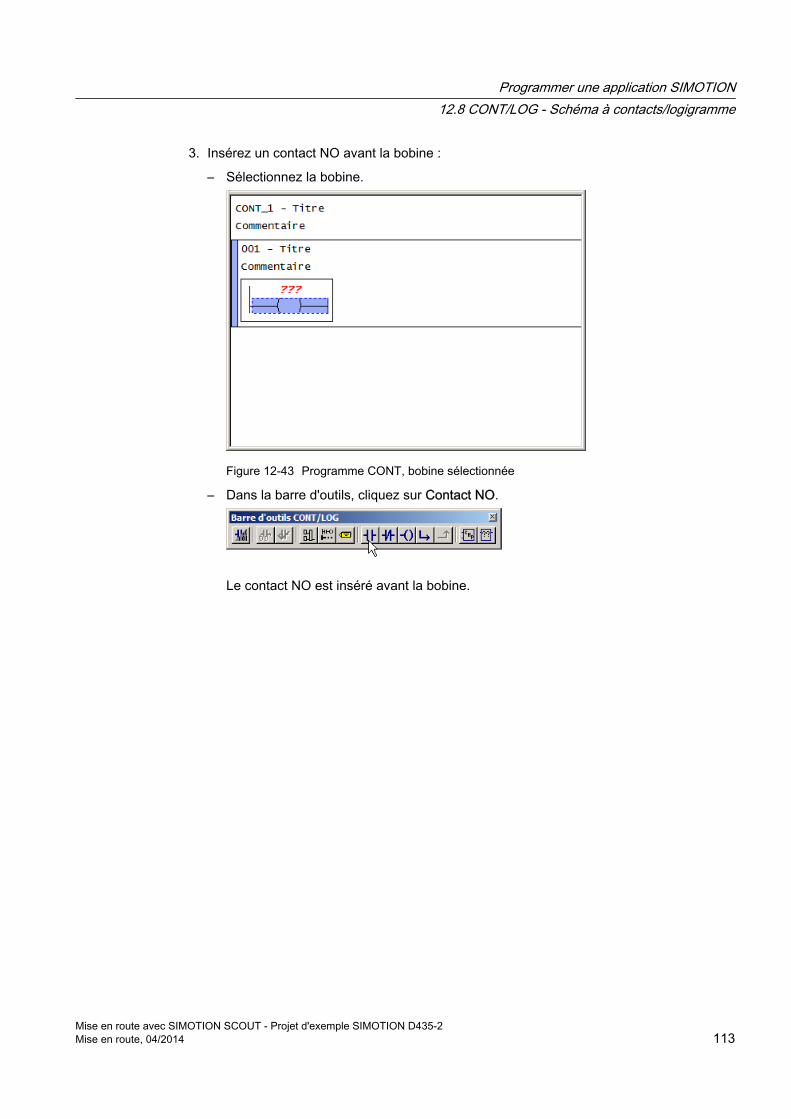
3. Insérez un contact NO avant la bobine :
– Sélectionnez la bobine.
Figure 12-43 Programme CONT, bobine sélectionnée
– Dans la barre d'outils, cliquez sur Contact NO.
Le contact NO est inséré avant la bobine.
Programmer une application SIMOTION12.8 CONT/LOG - Schéma à contacts/logigramme
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 113
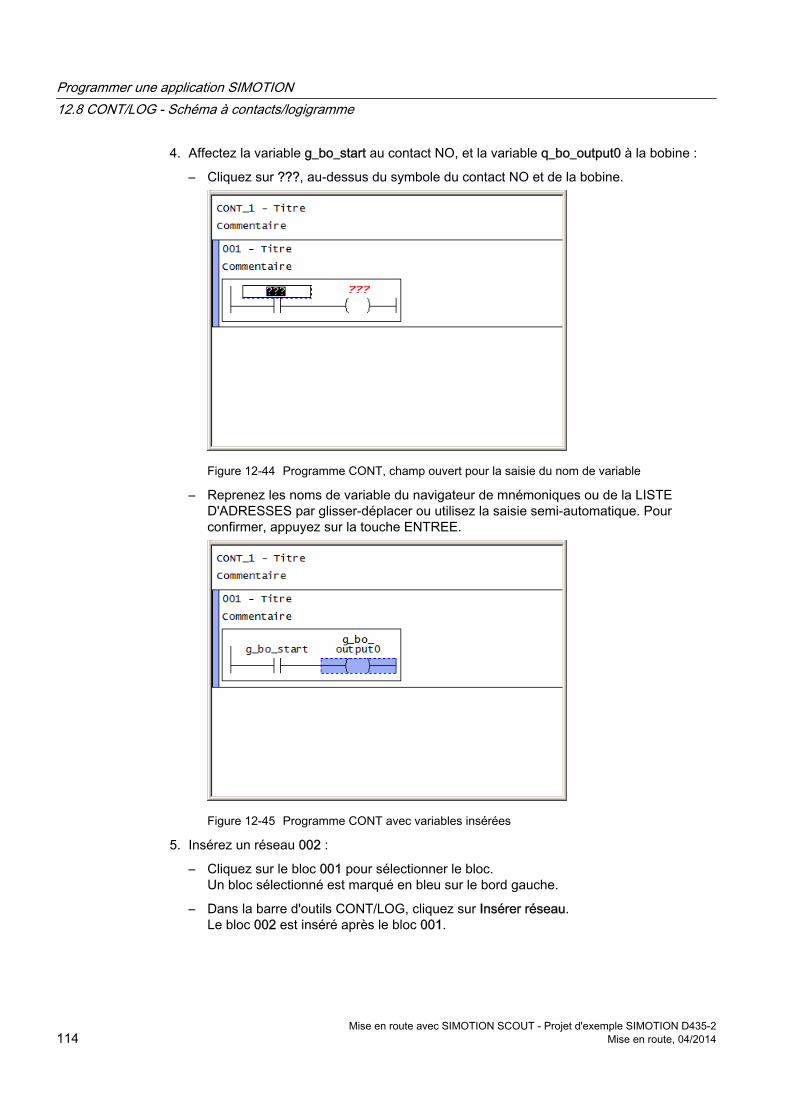
4. Affectez la variable g_bo_start au contact NO, et la variable q_bo_output0 à la bobine :
– Cliquez sur ???, au-dessus du symbole du contact NO et de la bobine.
Figure 12-44 Programme CONT, champ ouvert pour la saisie du nom de variable
– Reprenez les noms de variable du navigateur de mnémoniques ou de la LISTE D'ADRESSES par glisser-déplacer ou utilisez la saisie semi-automatique. Pour confirmer, appuyez sur la touche ENTREE.
Figure 12-45 Programme CONT avec variables insérées
5. Insérez un réseau 002 :
– Cliquez sur le bloc 001 pour sélectionner le bloc.Un bloc sélectionné est marqué en bleu sur le bord gauche.
– Dans la barre d'outils CONT/LOG, cliquez sur Insérer réseau.Le bloc 002 est inséré après le bloc 001.
Programmer une application SIMOTION12.8 CONT/LOG - Schéma à contacts/logigramme
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2114 Mise en route, 04/2014
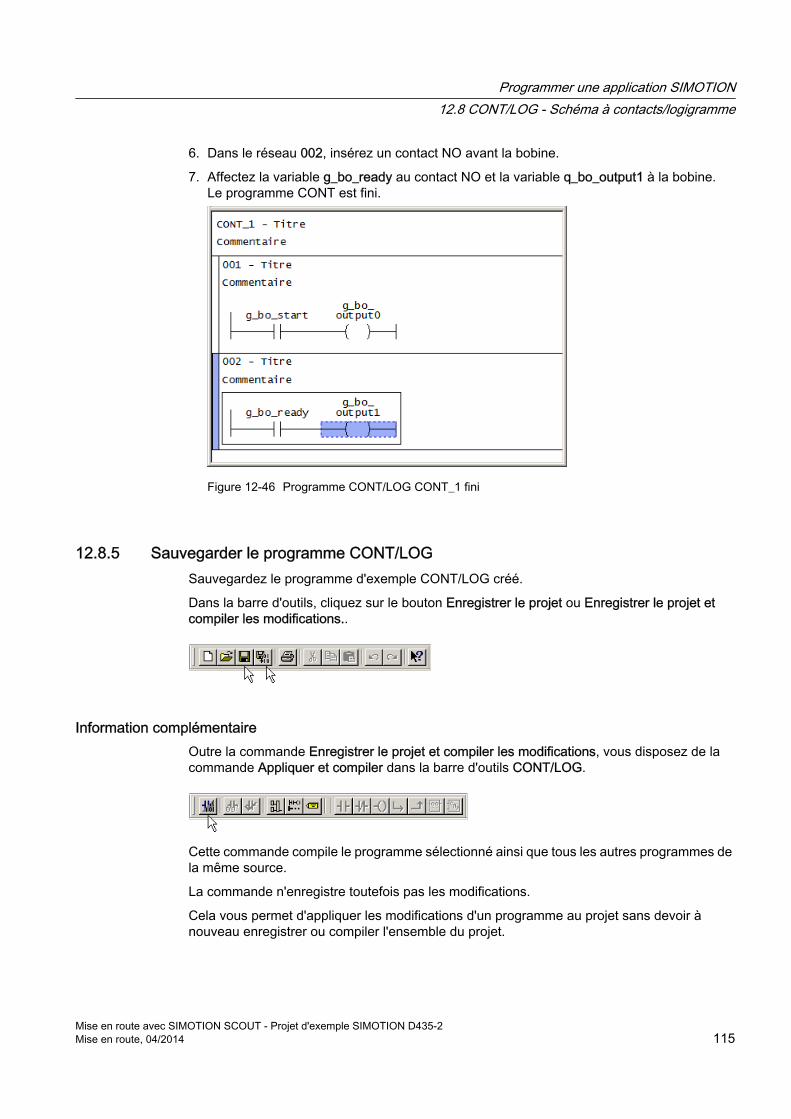
6. Dans le réseau 002, insérez un contact NO avant la bobine.
7. Affectez la variable g_bo_ready au contact NO et la variable q_bo_output1 à la bobine.Le programme CONT est fini.
Figure 12-46 Programme CONT/LOG CONT_1 fini
12.8.5 Sauvegarder le programme CONT/LOGSauvegardez le programme d'exemple CONT/LOG créé.
Dans la barre d'outils, cliquez sur le bouton Enregistrer le projet ou Enregistrer le projet et compiler les modifications..
Information complémentaireOutre la commande Enregistrer le projet et compiler les modifications, vous disposez de la commande Appliquer et compiler dans la barre d'outils CONT/LOG.
Cette commande compile le programme sélectionné ainsi que tous les autres programmes de la même source.
La commande n'enregistre toutefois pas les modifications.
Cela vous permet d'appliquer les modifications d'un programme au projet sans devoir à nouveau enregistrer ou compiler l'ensemble du projet.
Programmer une application SIMOTION12.8 CONT/LOG - Schéma à contacts/logigramme
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 115
12.9 Autres langages de programmationOutre MCC et CONT/LOG, SIMOTION SCOUT met à disposition d'autres langages de programmation.
● ST (Structured Text)ST est un langage de programmation textuel qui s'appuie sur le langage PASCAL. Le langage ST est défini par la norme CEI 61131‑3. Cette norme définit les langages de programmation qui peuvent être utilisés pour la programmation des automates programmables industriels (API). La base de ST est la partie "texte structuré" de la norme. En plus du langage de programmation défini par la norme CEI 61131‑3, SIMOTION ST contient des commandes technologiques.Un éditeur de texte convivial est à votre disposition pour la création de programmes. Le compilateur ST compile le programme édité en code exécutable et affiche toute erreur de syntaxe éventuelle en indiquant la ligne de programme et la cause de l'erreur.Dans l'onglet Bibliothèque de commandes du navigateur de projet, les commandes et fonctions nécessaires à la programmation sont représentées sous forme d'une arborescence. Vous pouvez par exemple les utiliser pour la programmation dans tous les langages de programmation.
● DCC (Drive Control Chart)Drive Control Chart (DCC) correspond à la configuration et à l'extension graphiques de la fonctionnalité de l'appareil avec des blocs de régulation, de calcul et de logique disponibles librement.DCC est composé de l'éditeur DCC et de la bibliothèque DCB (bibliothèques de blocs standard DCC).L'éditeur DCC convivial facilite la configuration graphique, visualise clairement les structures de régulation et permet de réutiliser les diagrammes élaborés.Pour définir les fonctions de commande et de régulation, il suffit de sélectionner des blocs multi-instances DCB (Drive Control Blocks) dans une bibliothèque prédéfinie (bibliothèque DCB) et de les interconnecter graphiquement par glisser-déposer.
● BibliothèquesLes bibliothèques permettent une élaboration de logiciels modulaires et mettent à votre disposition des types de données, des fonctions et des blocs fonctionnels personnalisés que vous pouvez utiliser sur tous les appareils SIMOTION.Les bibliothèques peuvent être écrites dans tous les langages de programmation et sont utilisables dans toutes les sources de programme (sources ST, sources MCC, etc.).
Tous les langages de programmation permettent de structurer clairement et de façon réutilisable l'application via les programmes, les fonctions et les blocs fonctionnels.
Pour tester les programmes, vous disposez de vastes fonctions de test avec état programme et points d'arrêt dans tous les langages. Vous pouvez visualiser et tester vos programmes en ligne.
Vous trouverez des informations complémentaires concernant les langages de programmation dans les manuels.
12.10 Résultat dans le projet d'exempleVous avez créé les programmes qui sont nécessaires dans le projet d'exemple de la mise en route pour le déplacement de l'axe commandé par programme.
Programmer une application SIMOTION12.10 Résultat dans le projet d'exemple
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2116 Mise en route, 04/2014
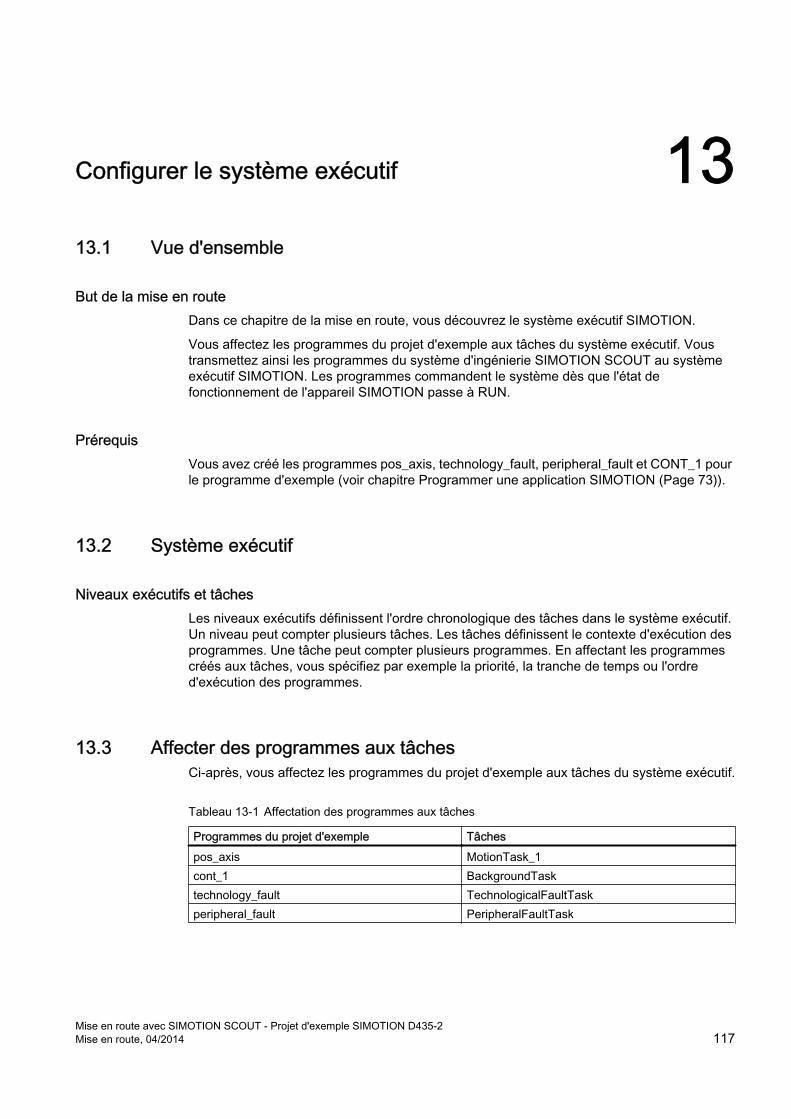
Configurer le système exécutif 1313.1 Vue d'ensemble
But de la mise en routeDans ce chapitre de la mise en route, vous découvrez le système exécutif SIMOTION.
Vous affectez les programmes du projet d'exemple aux tâches du système exécutif. Vous transmettez ainsi les programmes du système d'ingénierie SIMOTION SCOUT au système exécutif SIMOTION. Les programmes commandent le système dès que l'état de fonctionnement de l'appareil SIMOTION passe à RUN.
PrérequisVous avez créé les programmes pos_axis, technology_fault, peripheral_fault et CONT_1 pour le programme d'exemple (voir chapitre Programmer une application SIMOTION (Page 73)).
13.2 Système exécutif
Niveaux exécutifs et tâchesLes niveaux exécutifs définissent l'ordre chronologique des tâches dans le système exécutif. Un niveau peut compter plusieurs tâches. Les tâches définissent le contexte d'exécution des programmes. Une tâche peut compter plusieurs programmes. En affectant les programmes créés aux tâches, vous spécifiez par exemple la priorité, la tranche de temps ou l'ordre d'exécution des programmes.
13.3 Affecter des programmes aux tâchesCi-après, vous affectez les programmes du projet d'exemple aux tâches du système exécutif.
Tableau 13-1 Affectation des programmes aux tâches
Programmes du projet d'exemple Tâchespos_axis MotionTask_1cont_1 BackgroundTasktechnology_fault TechnologicalFaultTaskperipheral_fault PeripheralFaultTask
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 117
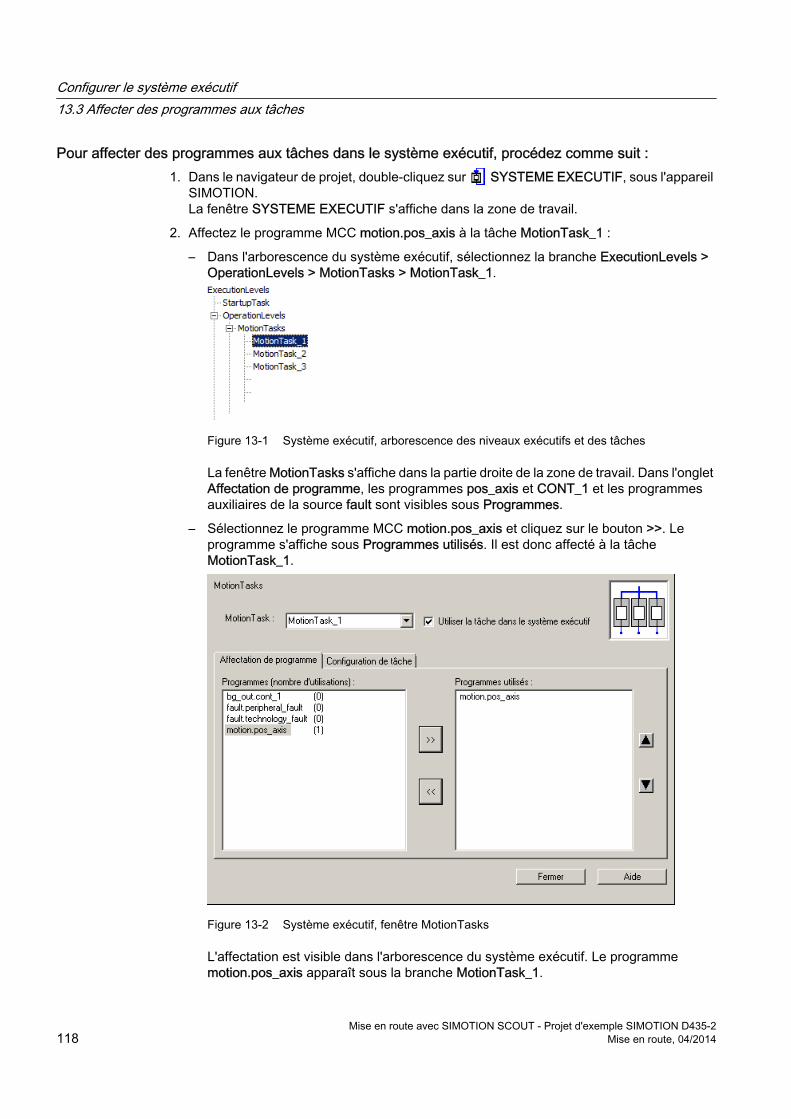
Pour affecter des programmes aux tâches dans le système exécutif, procédez comme suit :1. Dans le navigateur de projet, double-cliquez sur SYSTEME EXECUTIF, sous l'appareil
SIMOTION.La fenêtre SYSTEME EXECUTIF s'affiche dans la zone de travail.
2. Affectez le programme MCC motion.pos_axis à la tâche MotionTask_1 :
– Dans l'arborescence du système exécutif, sélectionnez la branche ExecutionLevels > OperationLevels > MotionTasks > MotionTask_1.
Figure 13-1 Système exécutif, arborescence des niveaux exécutifs et des tâches
La fenêtre MotionTasks s'affiche dans la partie droite de la zone de travail. Dans l'onglet Affectation de programme, les programmes pos_axis et CONT_1 et les programmes auxiliaires de la source fault sont visibles sous Programmes.
– Sélectionnez le programme MCC motion.pos_axis et cliquez sur le bouton >>. Le programme s'affiche sous Programmes utilisés. Il est donc affecté à la tâche MotionTask_1.
Figure 13-2 Système exécutif, fenêtre MotionTasks
L'affectation est visible dans l'arborescence du système exécutif. Le programme motion.pos_axis apparaît sous la branche MotionTask_1.
Configurer le système exécutif13.3 Affecter des programmes aux tâches
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2118 Mise en route, 04/2014
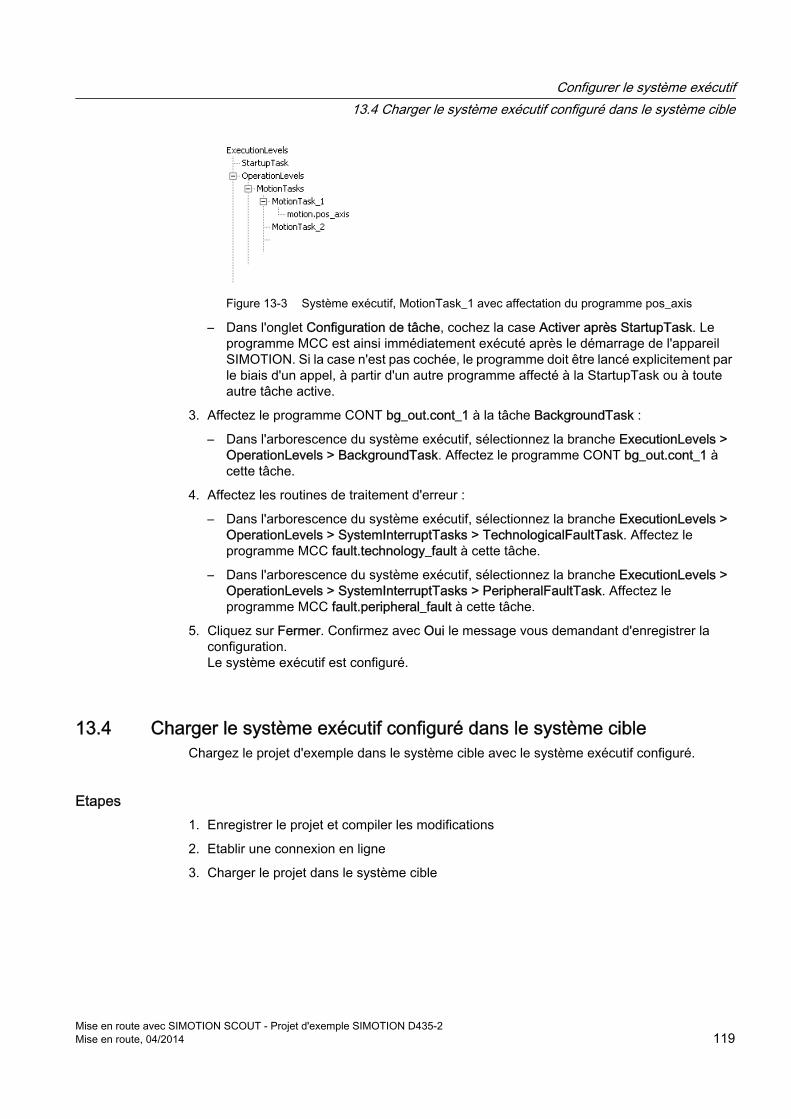
Figure 13-3 Système exécutif, MotionTask_1 avec affectation du programme pos_axis
– Dans l'onglet Configuration de tâche, cochez la case Activer après StartupTask. Le programme MCC est ainsi immédiatement exécuté après le démarrage de l'appareil SIMOTION. Si la case n'est pas cochée, le programme doit être lancé explicitement par le biais d'un appel, à partir d'un autre programme affecté à la StartupTask ou à toute autre tâche active.
3. Affectez le programme CONT bg_out.cont_1 à la tâche BackgroundTask :
– Dans l'arborescence du système exécutif, sélectionnez la branche ExecutionLevels > OperationLevels > BackgroundTask. Affectez le programme CONT bg_out.cont_1 à cette tâche.
4. Affectez les routines de traitement d'erreur :
– Dans l'arborescence du système exécutif, sélectionnez la branche ExecutionLevels > OperationLevels > SystemInterruptTasks > TechnologicalFaultTask. Affectez le programme MCC fault.technology_fault à cette tâche.
– Dans l'arborescence du système exécutif, sélectionnez la branche ExecutionLevels > OperationLevels > SystemInterruptTasks > PeripheralFaultTask. Affectez le programme MCC fault.peripheral_fault à cette tâche.
5. Cliquez sur Fermer. Confirmez avec Oui le message vous demandant d'enregistrer la configuration.Le système exécutif est configuré.
13.4 Charger le système exécutif configuré dans le système cibleChargez le projet d'exemple dans le système cible avec le système exécutif configuré.
Etapes1. Enregistrer le projet et compiler les modifications
2. Etablir une connexion en ligne
3. Charger le projet dans le système cible
Configurer le système exécutif13.4 Charger le système exécutif configuré dans le système cible
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 119
Enregistrer et compiler les modificationsDans la barre d'outils, cliquez sur le bouton Enregistrer le projet et compiler les modifications..
Etablir une connexion en ligneDans la barre d'outils, cliquez sur le bouton Connecter aux appareils cibles sélectionnés.
Charger dans le système cibleDans la barre d'outils, cliquez sur le bouton Charger le projet dans le système cible.
13.5 Résultat dans le projet d'exempleLa configuration de la commande d'axe est terminée.
● Vous avez configuré un axe dans le projet d'exemple.
● Vous avez créé un programme pour déplacer l'axe, ainsi que d'autres programmes nécessaires pour le fonctionnement.
● Vous avez affecté ces programmes aux tâches du système exécutif SIMOTION.
Au cours des étapes de configuration suivantes, vous démarrerez la commande d'axe sur l'appareil SIMOTION et visualiserez le mouvement de l'axe commandé par programme.
Configurer le système exécutif13.5 Résultat dans le projet d'exemple
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2120 Mise en route, 04/2014
Démarrer et arrêter le système 1414.1 Vue d'ensemble
But de la mise en routeVous commutez la CPU SIMOTION du projet d'exemple à l'état de fonctionnement RUN afin de lancer l'exécution du programme pos_axis. Sur le matériel, vous pouvez observer que l'axe tourne deux fois pendant environ 4 secondes. Après l'exécution du programme, vous commutez à nouveau à l'état STOP.
La commutation de l'état de fonctionnement s'effectue dans la boîte de dialogue Commander l'état de fonctionnement.
Prérequis● Vous avez créé les programmes pos_axis, technology_fault, peripheral_fault et CONT_1
pour le programme d'exemple et les avez affectés aux tâches du système exécutif SIMOTION (voir chapitres Programmer une application SIMOTION (Page 73) et Configurer le système exécutif (Page 117)).
● Vous avez compilé et chargé le projet dans le système cible (voir chapitre Charger le système exécutif configuré dans le système cible (Page 119)).
● SIMOTION SCOUT est en ligne.
14.2 Etats de fonctionnement RUN et STOP
Etats de fonctionnementDans la boîte de dialogue Commander l'état de fonctionnement de SIMOTION SCOUT, vous pouvez commuter une CPU SIMOTION à l'état RUN ou STOP.
État de fonctionnement RUNSIMOTION traite le programme utilisateur et les fonctionnalités correspondantes du système :
● Lecture de la mémoire image des entrées
● Exécution des programmes utilisateur qui sont affectés au système exécutif
● Écriture dans la mémoire image des sorties
Dans cet état, les packages technologiques sont actifs. Ils peuvent exécuter des commandes du programme utilisateur.
Etat de fonctionnement STOPSIMOTION ne traite aucun programme utilisateur.
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 121
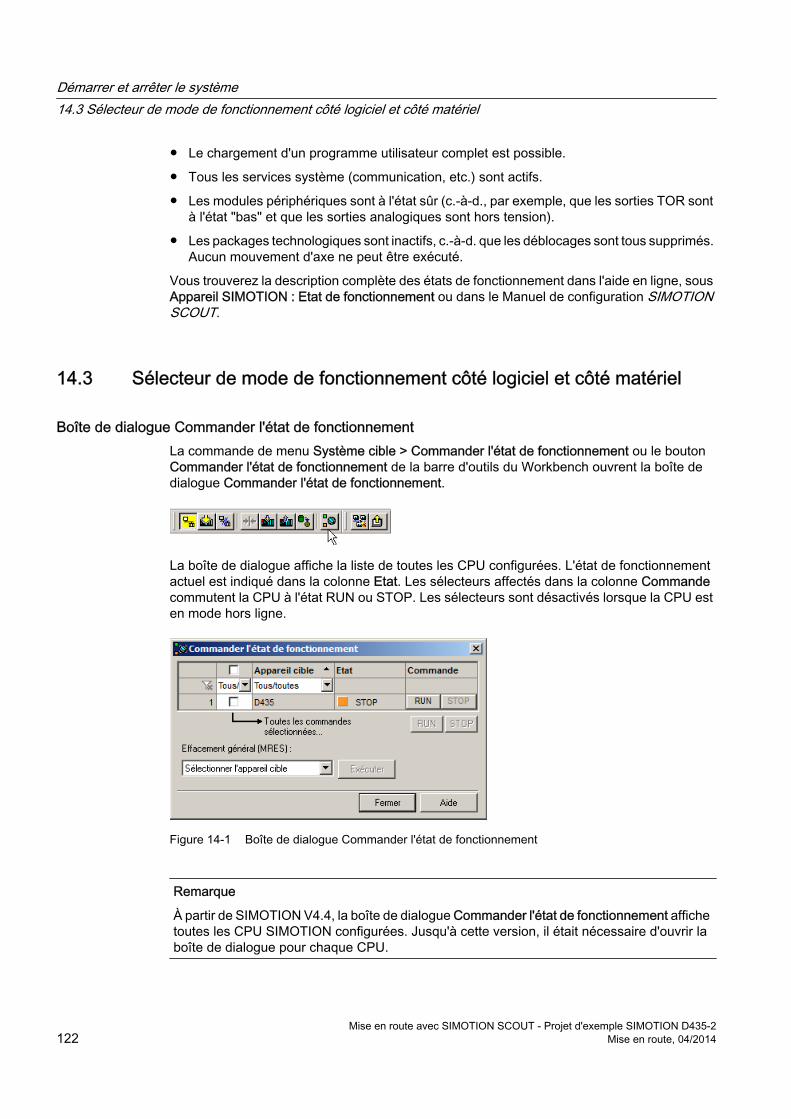
● Le chargement d'un programme utilisateur complet est possible.
● Tous les services système (communication, etc.) sont actifs.
● Les modules périphériques sont à l'état sûr (c.-à-d., par exemple, que les sorties TOR sont à l'état "bas" et que les sorties analogiques sont hors tension).
● Les packages technologiques sont inactifs, c.-à-d. que les déblocages sont tous supprimés. Aucun mouvement d'axe ne peut être exécuté.
Vous trouverez la description complète des états de fonctionnement dans l'aide en ligne, sous Appareil SIMOTION : Etat de fonctionnement ou dans le Manuel de configuration SIMOTION SCOUT.
14.3 Sélecteur de mode de fonctionnement côté logiciel et côté matériel
Boîte de dialogue Commander l'état de fonctionnementLa commande de menu Système cible > Commander l'état de fonctionnement ou le bouton Commander l'état de fonctionnement de la barre d'outils du Workbench ouvrent la boîte de dialogue Commander l'état de fonctionnement.
La boîte de dialogue affiche la liste de toutes les CPU configurées. L'état de fonctionnement actuel est indiqué dans la colonne Etat. Les sélecteurs affectés dans la colonne Commande commutent la CPU à l'état RUN ou STOP. Les sélecteurs sont désactivés lorsque la CPU est en mode hors ligne.
Figure 14-1 Boîte de dialogue Commander l'état de fonctionnement
Remarque
À partir de SIMOTION V4.4, la boîte de dialogue Commander l'état de fonctionnement affiche toutes les CPU SIMOTION configurées. Jusqu'à cette version, il était nécessaire d'ouvrir la boîte de dialogue pour chaque CPU.
Démarrer et arrêter le système14.3 Sélecteur de mode de fonctionnement côté logiciel et côté matériel
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2122 Mise en route, 04/2014
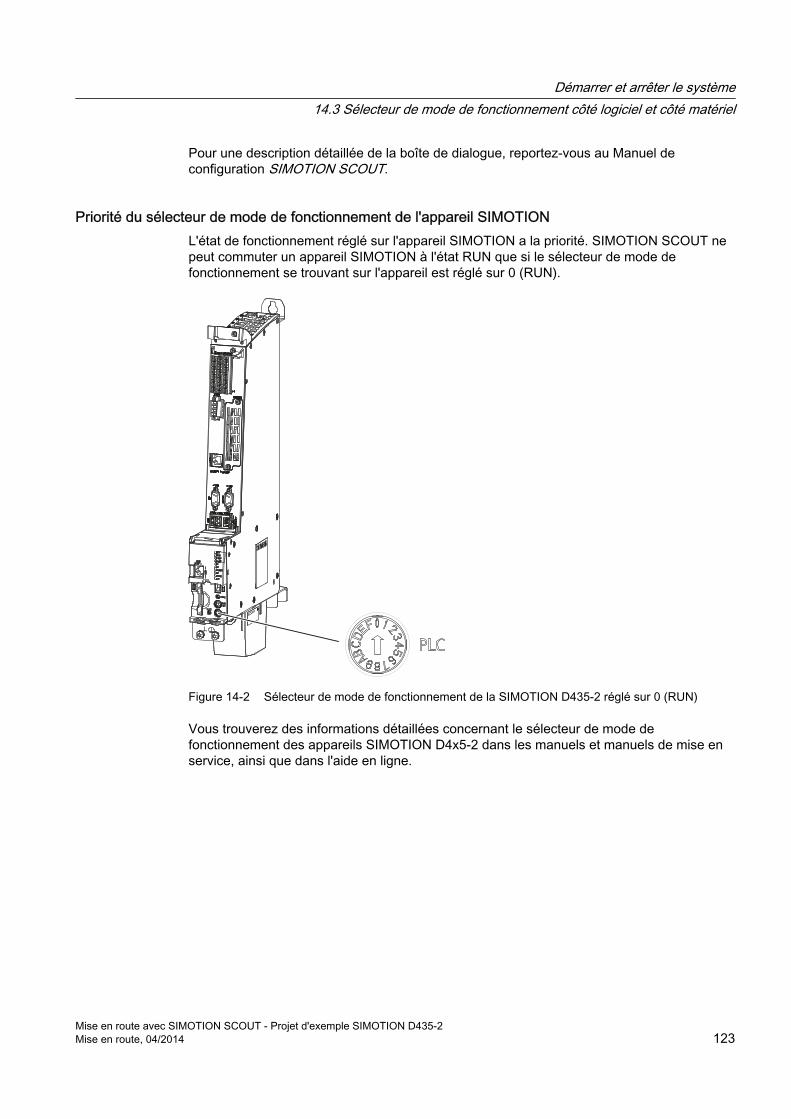
Pour une description détaillée de la boîte de dialogue, reportez-vous au Manuel de configuration SIMOTION SCOUT.
Priorité du sélecteur de mode de fonctionnement de l'appareil SIMOTIONL'état de fonctionnement réglé sur l'appareil SIMOTION a la priorité. SIMOTION SCOUT ne peut commuter un appareil SIMOTION à l'état RUN que si le sélecteur de mode de fonctionnement se trouvant sur l'appareil est réglé sur 0 (RUN).
Figure 14-2 Sélecteur de mode de fonctionnement de la SIMOTION D435‑2 réglé sur 0 (RUN)
Vous trouverez des informations détaillées concernant le sélecteur de mode de fonctionnement des appareils SIMOTION D4x5-2 dans les manuels et manuels de mise en service, ainsi que dans l'aide en ligne.
Démarrer et arrêter le système14.3 Sélecteur de mode de fonctionnement côté logiciel et côté matériel
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 123
14.4 Démarrer la commande par programme du projet d'exemple
Pour démarrer la commande d'axe du projet d'exemple sur l'appareil SIMOTION, procédez comme suit :
ATTENTION
Danger de mort en raison de mouvements intempestifs des machines
Vérifiez qu'il n'y a aucun danger pour les personnes, ni de risque de dommages matériels.
1. Ouvrez la boîte de dialogue Commander l'état de fonctionnement. Pour cela, cliquez sur le bouton Commander l'état de fonctionnement de la barre d'outils.
2. Commutez la CPU SIMOTION du projet d'exemple à l'état RUN. Pour cela, cliquez sur le sélecteur affecté RUN, dans la colonne Commande de la boîte de dialogue Commander l'état de fonctionnement.L'axe commence immédiatement à tourner. Après environ 8 secondes, l'axe est à nouveau immobilisé.Après l'exécution du programme pos_axis, l'appareil SIMOTION reste à l'état RUN.
3. Commutez l'appareil SIMOTION à l'état de fonctionnement STOP. Pour cela, cliquez sur le sélecteur affecté STOP, dans la colonne Commande.
Démarrer et arrêter le système14.4 Démarrer la commande par programme du projet d'exemple
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2124 Mise en route, 04/2014
Visualiser l'application 1515.1 Vue d'ensemble
But de la mise en routeDans ce chapitre de la mise en route, vous visualisez le mouvement de l'axe commandé par programme.
● Vous visualisez l'exécution du programme.
● Vous visualisez les valeurs dans le navigateur de mnémoniques.
● Vous regroupez certaines valeurs dans une table des surveillances.
● Vous enregistrez la séquence de mouvements de l'axe avec la fonction Trace.
Prérequis● Vous avez créé les programmes pos_axis, technology_fault, peripheral_fault et CONT_1
pour le programme d'exemple et les avez affectés aux tâches du système exécutif SIMOTION (voir chapitre Configurer le système exécutif (Page 117)).
● Vous avez compilé et chargé le projet dans le système cible (voir chapitre Charger le système exécutif configuré dans le système cible (Page 119)).
● SIMOTION SCOUT est en ligne.
● Etat de fonctionnement de l'appareil SIMOTION :
– L'appareil SIMOTION du projet d'exemple a été commuté à l'état STOP côté logiciel. Dans la boîte de dialogue Commander l'état de fonctionnement, le sélecteur de mode de fonctionnement de SIMOTION SCOUT affiche l'état STOP.
– L'appareil SIMOTION du projet d'exemple a été commuté à l'état RUN côté matériel. Le sélecteur de mode de fonctionnement se trouvant sur l'appareil SIMOTION est réglé sur 0 (RUN).
15.2 Visualiser l'exécution du programmeSIMOTION SCOUT met à disposition plusieurs fonctions pour la visualisation de l'exécution du programme.
Dans le projet d'exemple, vous utilisez la fonction Visualisation. Cette fonction vous permet de suivre l'exécution des blocs de commande dans un diagramme MCC. Le bloc de commande en cours apparaît sur fond jaune dans le diagramme MCC. Le marquage progresse à la vitesse d'exécution réelle du programme. Il n'est donc visible que pour les commandes "lentes" qui attendent l'exécution de la commande par la machine.
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 125
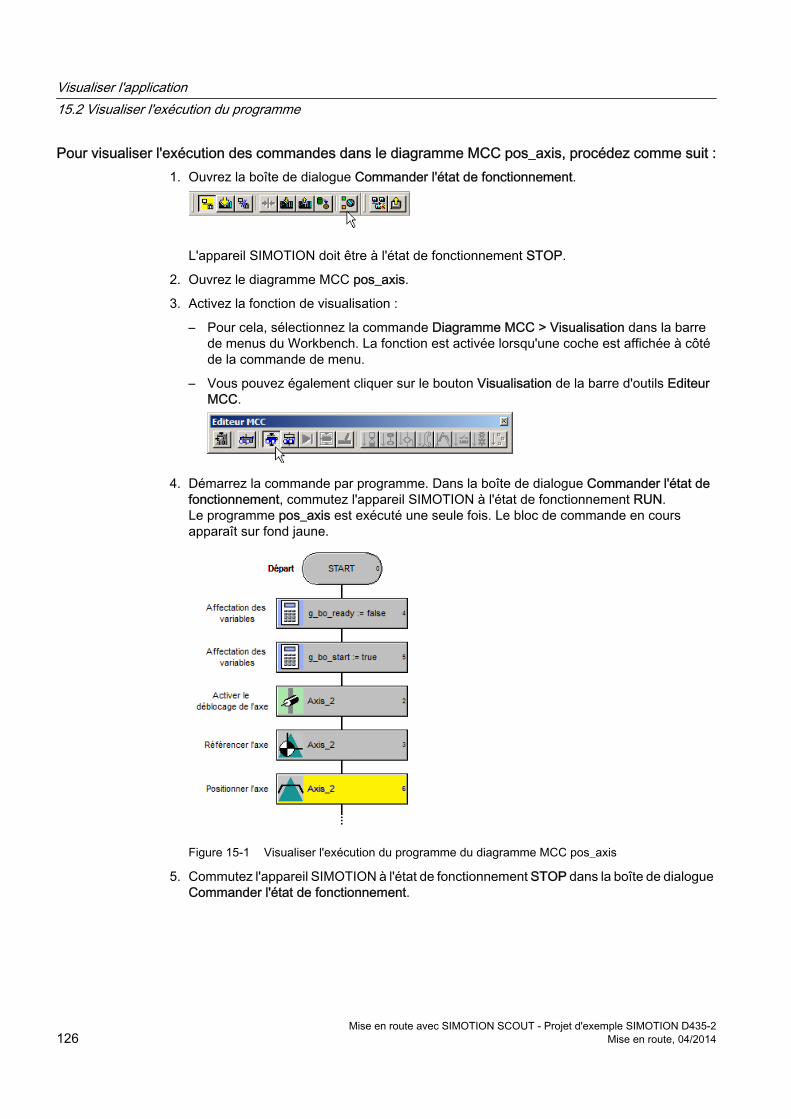
Pour visualiser l'exécution des commandes dans le diagramme MCC pos_axis, procédez comme suit :1. Ouvrez la boîte de dialogue Commander l'état de fonctionnement.
L'appareil SIMOTION doit être à l'état de fonctionnement STOP.
2. Ouvrez le diagramme MCC pos_axis.
3. Activez la fonction de visualisation :
– Pour cela, sélectionnez la commande Diagramme MCC > Visualisation dans la barre de menus du Workbench. La fonction est activée lorsqu'une coche est affichée à côté de la commande de menu.
– Vous pouvez également cliquer sur le bouton Visualisation de la barre d'outils Editeur MCC.
4. Démarrez la commande par programme. Dans la boîte de dialogue Commander l'état de fonctionnement, commutez l'appareil SIMOTION à l'état de fonctionnement RUN.Le programme pos_axis est exécuté une seule fois. Le bloc de commande en cours apparaît sur fond jaune.
Figure 15-1 Visualiser l'exécution du programme du diagramme MCC pos_axis
5. Commutez l'appareil SIMOTION à l'état de fonctionnement STOP dans la boîte de dialogue Commander l'état de fonctionnement.
Visualiser l'application15.2 Visualiser l'exécution du programme
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2126 Mise en route, 04/2014
Informations complémentairesVous trouverez de plus amples informations concernant la visualisation du programme dans l'aide en ligne, sous Surveillance de l'exécution du programme.
15.3 Visualiser des variables dans le navigateur de mnémoniquesDans le navigateur de mnémoniques, vous pouvez visualiser des variables (lire la valeur d'état) ou leur affecter des valeurs (affecter des valeurs de forçage).
Pour l'exemple de projet, vous visualisez la position réelle de l'axe pendant l'exécution du programme.
Pour visualiser les valeurs dans le navigateur de mnémoniques, procédez comme suit :1. Ouvrez la boîte de dialogue Commander l'état de fonctionnement.
L'appareil SIMOTION doit être à l'état de fonctionnement STOP.
2. Dans le navigateur de projet, sélectionnez l'axe créé dans le projet d'exemple dans le dossier AXE. Les variables système et les données de configuration de l'axe sont affichées dans la vue de détail, dans l'onglet Navigateur de mnémoniques.
3. Dans le navigateur de mnémoniques, ouvrez la variable système positioningstate.actualposition (position réelle de l'axe).Pour trouver la variable, procédez comme suit :
– Filtrer la liste : dans la ligne de filtre du navigateur de mnémoniques, vous pouvez définir un critère de filtrage. Les 5 derniers critères sont enregistrés et peuvent être sélectionnés et réutilisés.Saisissez un terme de filtrage approprié dans la ligne de filtre (par exemple positioningstate). Appuyez sur ENTREE pour valider.
– Rechercher la variable : outre l'utilisation de la fonction de filtrage, vous pouvez rechercher la variable. Sélectionnez la commande de menu Modifier > Rechercher. Saisissez un terme de recherche approprié dans la boîte de dialogue Rechercher (par exemple positioningstate). Cliquez sur Suivant.
Dans le navigateur de mnémoniques, la position réelle de l'axe s'affiche dans la colonne Valeur d'état.
4. Démarrez la commande par programme. Dans la boîte de dialogue Commander l'état de fonctionnement, commutez l'appareil SIMOTION à l'état de fonctionnement RUN.Le programme pos_axis est exécuté une seule fois. Les valeurs de la position réelle de l'axe, qui changent, s'affichent dans le navigateur de mnémoniques.Après l'exécution du programme, l'appareil SIMOTION reste à l'état de fonctionnement RUN.
5. Commutez l'appareil SIMOTION à l'état de fonctionnement STOP dans la boîte de dialogue Commander l'état de fonctionnement.
Visualiser l'application15.3 Visualiser des variables dans le navigateur de mnémoniques
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 127
Vous pouvez également visualiser les valeurs des variables globales à l'appareil et des variables E/S, ainsi que les valeurs des variables des tables de déclaration des sources. Pour cela, cliquez sur les dossiers LISTE D'ADRESSES ou VARIABLES GLOBALES D'APPAREIL ou sur la source correspondante, dans le navigateur de projet. Les variables s'affichent dans le navigateur de mnémoniques.
15.4 Visualiser des variables dans la table des surveillancesVous pouvez regrouper différents paramètres d'entraînement et variables (variables système de plusieurs appareils et objets technologiques, variables utilisateur de plusieurs programmes) dans une table afin de pouvoir les visualiser ensemble et les forcer le cas échéant.
Pour regrouper des variables dans une table des surveillances, procédez comme suit :1. Ouvrez le navigateur de mnémoniques.
2. Dans le navigateur de mnémoniques, effectuez un clic droit sur la variable que vous souhaitez reprendre dans la table des surveillances. Dans le menu contextuel, sélectionnez la commande Insérer dans la table des surveillances.
Pour ouvrir une table des surveillances, procédez comme suit :Dans le navigateur de projet, vous trouvez toutes les tables des surveillances créées dans le dossier VISUALISATION. Double-cliquez sur une table des surveillances pour l'ouvrir.
Pour plus d'informations à ce sujet, reportez-vous à l'aide en ligne, sous Utiliser le Workbench SCOUT > Utiliser les listes > Table des surveillances.
15.5 Enregistrer des signaux avec la fonction Trace
15.5.1 TraceLa fonction Trace permet d'enregistrer et de sauvegarder des courbes de signaux et des valeurs de variables. Les données enregistrées peuvent par exemple être utilisées à des fins de diagnostic pour les séquences de mouvements des machines et pour rechercher les erreurs dans les programmes utilisateur.
Pour le projet d'exemple, vous enregistrez la position réelle de l'axe dans le temps et vous la représentez dans le diagramme.
Visualiser l'application15.5 Enregistrer des signaux avec la fonction Trace
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2128 Mise en route, 04/2014
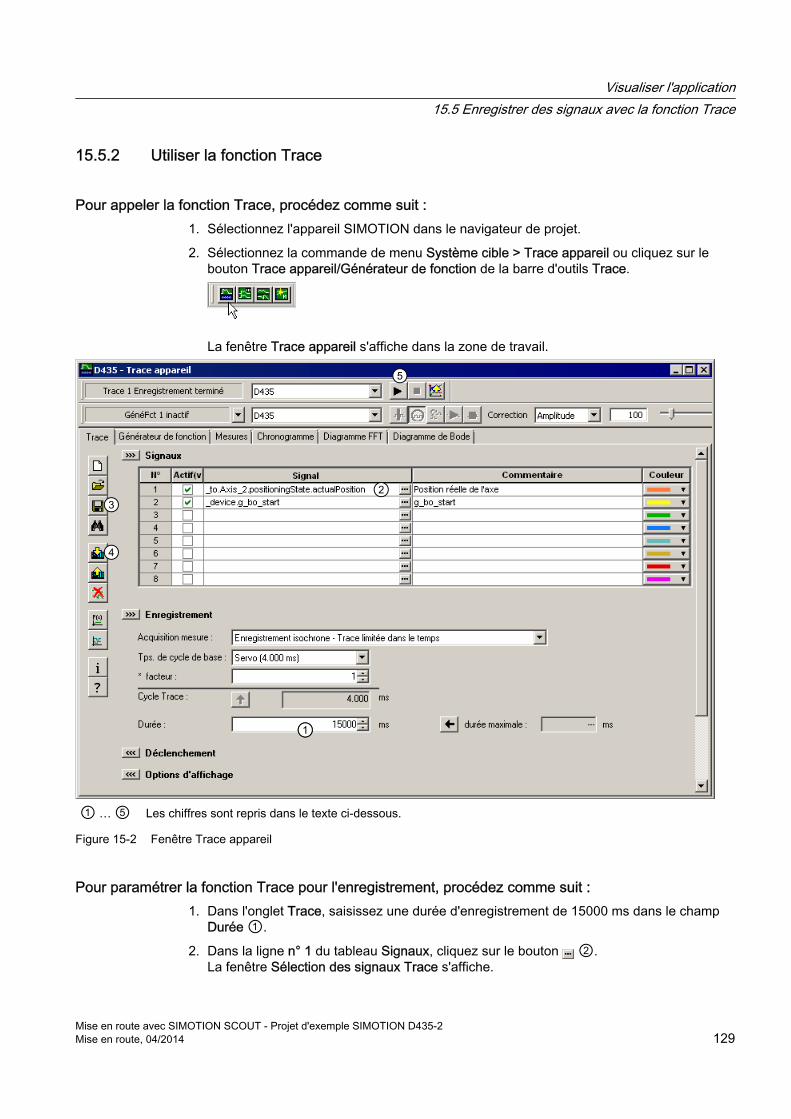
15.5.2 Utiliser la fonction Trace
Pour appeler la fonction Trace, procédez comme suit :1. Sélectionnez l'appareil SIMOTION dans le navigateur de projet.
2. Sélectionnez la commande de menu Système cible > Trace appareil ou cliquez sur le bouton Trace appareil/Générateur de fonction de la barre d'outils Trace.
La fenêtre Trace appareil s'affiche dans la zone de travail.
① … ⑤ Les chiffres sont repris dans le texte ci-dessous.
Figure 15-2 Fenêtre Trace appareil
Pour paramétrer la fonction Trace pour l'enregistrement, procédez comme suit :1. Dans l'onglet Trace, saisissez une durée d'enregistrement de 15000 ms dans le champ
Durée ①.
2. Dans la ligne n° 1 du tableau Signaux, cliquez sur le bouton ②. La fenêtre Sélection des signaux Trace s'affiche.
Visualiser l'application15.5 Enregistrer des signaux avec la fonction Trace
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 129
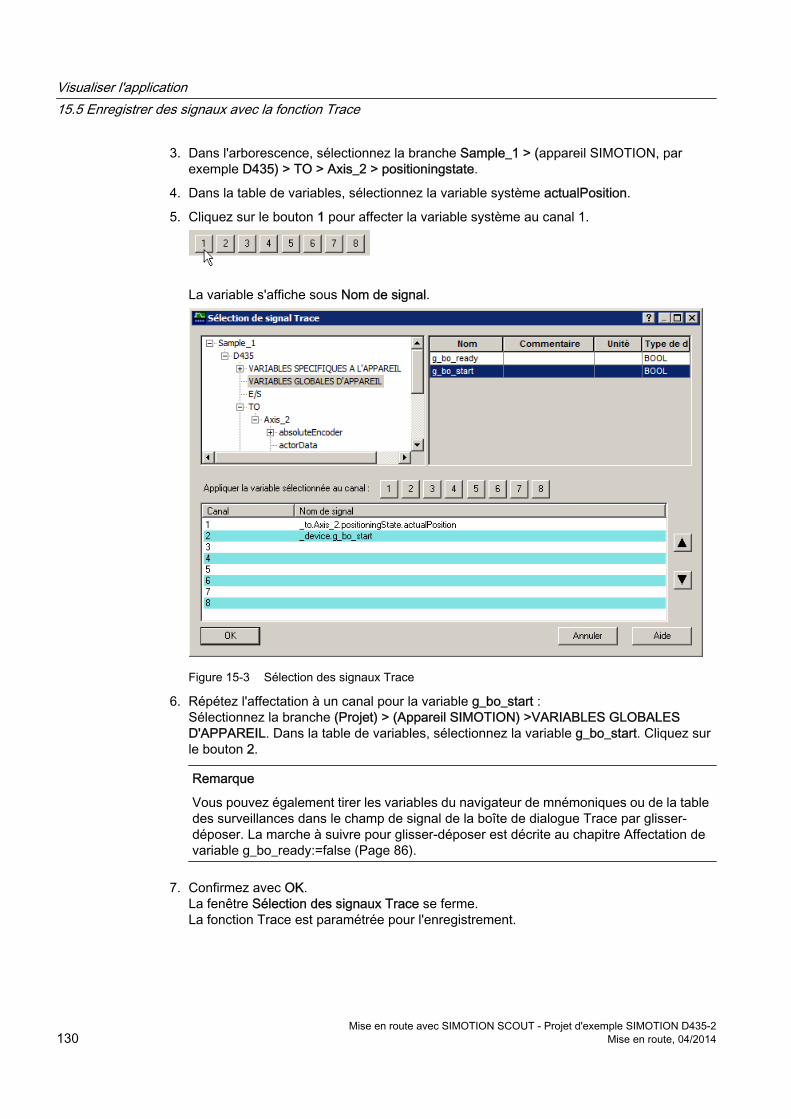
3. Dans l'arborescence, sélectionnez la branche Sample_1 > (appareil SIMOTION, par exemple D435) > TO > Axis_2 > positioningstate.
4. Dans la table de variables, sélectionnez la variable système actualPosition.
5. Cliquez sur le bouton 1 pour affecter la variable système au canal 1.
La variable s'affiche sous Nom de signal.
Figure 15-3 Sélection des signaux Trace
6. Répétez l'affectation à un canal pour la variable g_bo_start :Sélectionnez la branche (Projet) > (Appareil SIMOTION) >VARIABLES GLOBALES D'APPAREIL. Dans la table de variables, sélectionnez la variable g_bo_start. Cliquez sur le bouton 2.
Remarque
Vous pouvez également tirer les variables du navigateur de mnémoniques ou de la table des surveillances dans le champ de signal de la boîte de dialogue Trace par glisser-déposer. La marche à suivre pour glisser-déposer est décrite au chapitre Affectation de variable g_bo_ready:=false (Page 86).
7. Confirmez avec OK.La fenêtre Sélection des signaux Trace se ferme.La fonction Trace est paramétrée pour l'enregistrement.
Visualiser l'application15.5 Enregistrer des signaux avec la fonction Trace
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2130 Mise en route, 04/2014
Pour enregistrer le paramétrage de la fonction trace, procédez comme suit :Le paramétrage de la fonction Trace n'est pas enregistré dans les données du projet. Lorsque vous fermez le projet, le paramétrage de la fonction Trace est supprimé.
Pour enregistrer le paramétrage, cliquez sur le bouton Transférer dans le catalogue ③ de l'onglet Trace. Dans le champ Entrée de catalogue, saisissez le nom sous lequel le réglage/paramétrage doit être enregistré dans le catalogue de la fonction Trace.
Pour enregistrer avec la fonction Trace, procédez comme suit :1. Connectez-vous en ligne.
2. Chargez le paramétrage de la fonction Trace dans le système cible :
– Cliquez sur le bouton Download Paramétrage ④ de l'onglet Trace
– Après le chargement correct, confirmez la boîte de dialogue qui s'affiche avec OK.
3. Ouvrez la boîte de dialogue Commander l'état de fonctionnement.
L'appareil SIMOTION doit être à l'état de fonctionnement STOP.
4. Dans la fenêtre Trace appareil, ouvrez l'onglet Chronogramme.
Visualiser l'application15.5 Enregistrer des signaux avec la fonction Trace
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 131
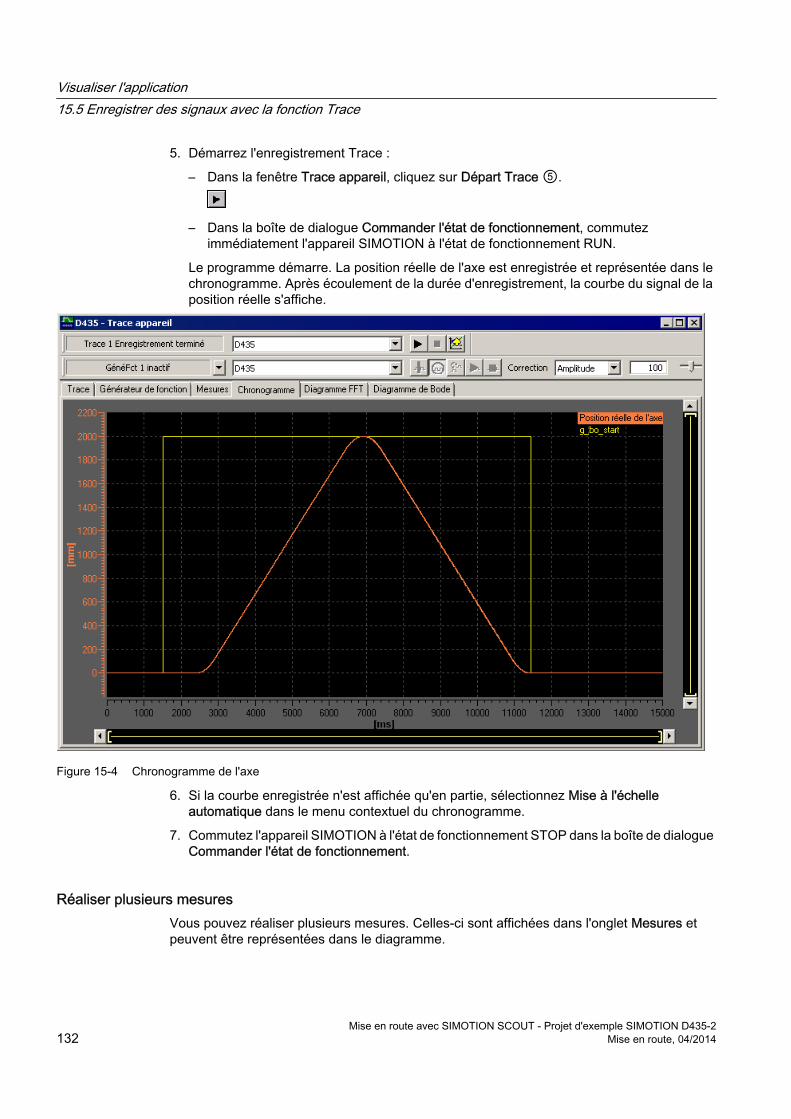
5. Démarrez l'enregistrement Trace :
– Dans la fenêtre Trace appareil, cliquez sur Départ Trace ⑤.
– Dans la boîte de dialogue Commander l'état de fonctionnement, commutez immédiatement l'appareil SIMOTION à l'état de fonctionnement RUN.
Le programme démarre. La position réelle de l'axe est enregistrée et représentée dans le chronogramme. Après écoulement de la durée d'enregistrement, la courbe du signal de la position réelle s'affiche.
Figure 15-4 Chronogramme de l'axe
6. Si la courbe enregistrée n'est affichée qu'en partie, sélectionnez Mise à l'échelle automatique dans le menu contextuel du chronogramme.
7. Commutez l'appareil SIMOTION à l'état de fonctionnement STOP dans la boîte de dialogue Commander l'état de fonctionnement.
Réaliser plusieurs mesuresVous pouvez réaliser plusieurs mesures. Celles-ci sont affichées dans l'onglet Mesures et peuvent être représentées dans le diagramme.
Visualiser l'application15.5 Enregistrer des signaux avec la fonction Trace
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2132 Mise en route, 04/2014
Vous pouvez sauvegarder les mesures enregistrées et les ouvrir ultérieurement à des fins de documentation.
15.5.3 Fonctions de diagnostic complémentairesVous trouverez une vue d'ensemble des nombreuses fonctions de maintenance et de diagnostic dans l'aide en ligne, à la rubrique Diagnostic, ainsi que dans l'information produit SIMOTION SCOUT Vue d'ensemble des fonctions de maintenance et de diagnostic.
15.6 Résultat dans le projet d'exempleLa création du chronogramme Trace marque la fin de la mise en route.
Nous vous recommandons de poursuivre votre familiarisation avec SIMOTION SCOUT à l'aide des projets d'exemple des Utilities & Applications.
Vous trouverez des indications sur les Utilities & Applications au chapitre Utilitaires et applications (Page 24).
Visualiser l'application15.6 Résultat dans le projet d'exemple
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 133

Directives CSDE AA.1 Définition CSDE
Que signifie CSDE ? Les composants sensibles aux décharges électrostatiques (CSDE) sont des composants individuels ainsi que des connexions, des sous-ensembles ou des appareils intégrés pouvant subir des endommagements sous l'effet de champs électrostatiques ou de décharges électrostatiques.
IMPORTANT
Endommagement dû à des champs électriques ou des décharges électrostatiques
Les champs électriques ou une décharge électrostatique peuvent causer des défauts de fonctionnement dus à l'endommagement de composants, circuits intégrés, modules ou appareils.● Emballer, stocker, transporter ou expédier les composants, modules ou appareils
électroniques uniquement dans l'emballage d'origine du produit ou dans d'autres matériaux appropriés comme du caoutchouc mousse ou du papier aluminium possédant des propriétés conductrices.
● Les personnes manipulant les composants, modules et appareils doivent être reliées à la terre par l'une des mesures suivantes :– Port d'un bracelet antistatique– Port de chaussures antistatiques ou de chaussures munies de bandes de terre
antistatiques dans les zones antistatiques pourvues de planchers conducteurs● Ne poser les composants, modules ou appareils électroniques que sur des surfaces
conductrices (table à revêtement antistatique, mousse conductrice antistatique, sachets antistatiques, conteneurs antistatiques).
A.2 Charge électrostatique de personnesToute personne non reliée au potentiel électrique de son environnement peut se charger d'électricité statique.
Les valeurs données dans la figure ci-dessous sont les valeurs maximales de tensions électrostatiques auxquelles un opérateur peut être chargé lorsqu'il est en contact avec les matériaux présentés dans cette figure. Ces valeurs correspondent aux indications de la norme CEI 801-2.
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 135
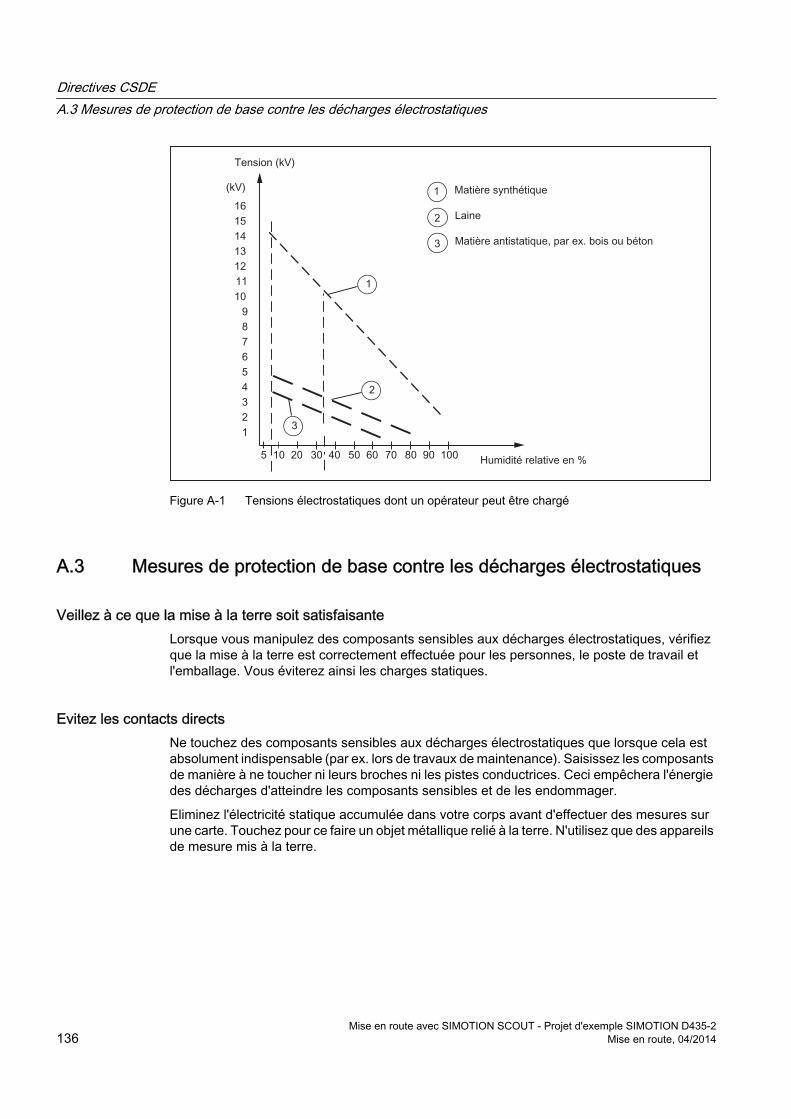
Figure A-1 Tensions électrostatiques dont un opérateur peut être chargé
A.3 Mesures de protection de base contre les décharges électrostatiques
Veillez à ce que la mise à la terre soit satisfaisanteLorsque vous manipulez des composants sensibles aux décharges électrostatiques, vérifiez que la mise à la terre est correctement effectuée pour les personnes, le poste de travail et l'emballage. Vous éviterez ainsi les charges statiques.
Evitez les contacts directsNe touchez des composants sensibles aux décharges électrostatiques que lorsque cela est absolument indispensable (par ex. lors de travaux de maintenance). Saisissez les composants de manière à ne toucher ni leurs broches ni les pistes conductrices. Ceci empêchera l'énergie des décharges d'atteindre les composants sensibles et de les endommager.
Eliminez l'électricité statique accumulée dans votre corps avant d'effectuer des mesures sur une carte. Touchez pour ce faire un objet métallique relié à la terre. N'utilisez que des appareils de mesure mis à la terre.
Directives CSDEA.3 Mesures de protection de base contre les décharges électrostatiques
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2136 Mise en route, 04/2014
Index
AActiver le déblocage des axes, 90Affectation des variables
g_bo_ready:=false, 86g_bo_ready:=true, 98g_bo_start:=false, 98g_bo_start:=true, 88LineModule_STW:=myFB_LineControl.periOut, 103
Affecter l'axe à l'entraînement, 61Aide en ligne de SIMOTION SCOUT, 22Alimentation, 53Assistant axe, 57
BBarre d'outils Editeur MCC, 83Bibliographie, 3
CCanaux E/S de la borne X142, 71Chargement de projet, 44Commander l'état de fonctionnement, 122Connecter aux appareils cibles sélectionnés, 41Consignes de sécurité, 17CONT, 108Créer les variables E/S, 76Créer un axe, 58Créer un diagramme MCC, 82Créer un nouveau projet, 31Créer une source MCC, 81
DDirective
CSDE, 135Directive CSDE, 135
EEnregistrement et compilation du projet, 39Enregistrer le projet et compiler les modifications, 107
EntraînementConfiguration automatique, 48
ÉÉtat de fonctionnement, 121
LLangage de programmation
CONT, 108LOG, 108MCC, 80ST, 116
LOG, 108
MMCC, 80
Activer le déblocage des axes, 90Positionner l'axe sur la position de destination, 93Positionner l'axe sur la position initiale, 95Référencer l'axe, 92Supprimer le déblocage des axes, 97Traiter les événements système, 106
Mise en route avec SIMOTION SCOUTAffecter des programmes aux tâches, 117Appel de fonction système _LineModule_control[FB], 100Charger la configuration de l'axe dans le système cible, 63Charger le projet dans le système cible, 43, 63, 119Charger le système exécutif configuré dans le système cible, 119Configurer la communication de la PG/du PC, 33Configurer l'alimentation, 53Configurer le système exécutif, 117Configurer l'entraînement, 47Configurer les sorties TOR, 71Configurer un axe, 57Connecter aux appareils cibles sélectionnés, 40Créer les variables E/S, 76Créer les variables globales à l'appareil, 75Créer un appareil SIMOTION dans le projet, 33Créer un axe, 58Créer un diagramme MCC, 82Créer un nouveau projet, 31
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2Mise en route, 04/2014 137
Créer un programme CONT/LOG, 110Créer un programme d'exemple CONT, 111Créer une source CONT/LOG, 109Créer une source MCC, 81Démarrer et arrêter le système, 121Enregistrer des signaux avec la fonction Trace, 128Enregistrer le projet et compiler les modifications, 39Faire activer l'alimentation par le programme, 98Langages de programmation dans le projet d'exemple, 80PG/PC, 37Programme d'exemple MCC, alimentation, 98Programme d'exemple MCC, structure de base, 85Programmer une application SIMOTION, 73Projet d'exemple, étapes de configuration, 19Projet d'exemple, prérequis, 21Tester l'axe à l'aide du tableau de commande axe, 65Types de variable, 74Variables du projet d'exemple, 74Visualiser des variables dans la table des surveillances, 128Visualiser des variables dans le navigateur de mnémoniques, 127Visualiser l'application, 125Vue d'ensemble, 19
Motion Control Chart, 80
NNavigateur de mnémoniques, 75Niveaux exécutifs, 117
OObjet technologique Axe, 57
Pperipheral_fault, 107PG/PC, 37
SSaisie semi-automatique, 89, 103Sélecteur de mode de fonctionnement
dans SIMOTION SCOUT, 122
Matériel SIMOTION, 123Sélection des appareils cibles, 41SIMOTION D, 33Sorties TOR, 71Source
CONT/LOG, 109MCC, 81
Supprimer le déblocage des axes, 97Système exécutif, 117
TTable des surveillances, 128Tableau de commande axe, 65Tâches, 117technology_fault, 107Trace, 128Traiter les événements système, 106Types de variable, 74
UUtilitaires et applications, 24
VVariables globales aux appareils, 75
Index
Mise en route avec SIMOTION SCOUT - Projet d'exemple SIMOTION D435-2138 Mise en route, 04/2014