Pesage en marche : Recherche et expérimentations...
32
Intervenant - date Pesage en marche : Recherche et expérimentations menées à IFSTTAR Sio-Song Ieng et Hocine Imine LEPSIS
Transcript of Pesage en marche : Recherche et expérimentations...

Intervenant - date
Pesage en marche :
Recherche et
expérimentations menées à
IFSTTAR
Sio-Song Ieng et Hocine Imine
LEPSIS

Intervenant - date
Le pesage : pourquoi ?
• L'objectif initial était la protection de l'infrastructure. Connaître les charges supportées permet de mieux dimensionner les routes et les ponts et de mieux les préserver.
• Avec l'augmentation du trafic lourd de marchandise en Europe, l'augmentation des poids légaux de certains pays membres de l'U.E. et une concurrence entre les modes de transport et entre les sociétés de transport, le contrôle devient indispensable.

Intervenant - date
Le développement du pesage en
marche
• Le pesage en marche a été inventé dans les années 50
aux Etats-Unis(Pr. Clyde Lee).
• A la fin des années 70, l'IRT (futur INRETS) a inventé un
capteur de pesage utilisant du piézo-céramique.
• 1982-1992, le LCPC travaille avec la société ECM sur la
fabrication d'un capteur piézo-céramique, le traitement
du signal, et la pose du capteur. Un projet national
« pesage en marche » a été lancé et piloté par le LCPC.
• A partir de 1993, le LCPC travaille avec les partenaires
européens (COST323, Projet européen WAVE,
REMOVE)

Intervenant - date
Conventions DGITM-IFSTTAR
• Depuis 1996, la DGITM finance le LCPC en titre VI et
titre IX dans le cadre de conventions pour les objectifs
initiaux suivants :
– Mise au point d'un système de pesage en marche à
basse vitesse (Un système de la société Captels a
été homologué en classe 5 de l'OIML).
– Amélioration de la précision et la fiabilité d'un
système de pesage à vitesse courante.
– Accompagnement et aide à l'installation des
Equipements de Pesage en Marche (EPM) sur la
route pour la pré-sélection des véhicules.

Intervenant - date
Les technologies et méthodes étudiées
• Les capteurs piézo-électriques (piézo-céramique, piézo-
quartz et piézo-polymère), peuvent être installés partout,
capteurs classiques,
• La technique de pesage par ponts instrumentés, sous
les ponts adaptés à ce type de technique. Technique
discrète et le système est « démontable»,
• Le pesage embarqué, est une technique de pesage
directe en continue. La roue dynamométrique est la plus
précise mais coûteuse.
Intervenant - date
Les capteurs piézo-électrique et le
pesage multi-capteurs (MS-WIM)
• Les charges mesurées par les capteurs sont entachées
d'erreurs à cause de l’interaction entre le véhicule et la
chaussée. La grandeur mesurée est en réalité la force
d'impact f est la somme de la force statique et de la force
dynamique ε.
• En multipliant les capteurs distants les uns des autres de
d, nous obtenons des informations sur la distribution de
ε. Le professeur britannique D. Cebon et ses
collaborateurs ont proposé deux approches en utilisant
l'hypothèse E[ ε]=0.
• Thèse de Sainte-Marie au LCPC.

Intervenant - date
Site de pesage multi-capteurs à
Maulan(2005-2008)
• Le site de pesage MS-WIM est situé à 13Km du site de
pesage basse vitesse du Rupt-aux-Nonains. Le site est
choisi suivant les spécifications du cost323
Maulan
Aire de pesage basse vitesse
Site de pesage MS-WIM

Intervenant - date
Les grilles de capteurs piézo-électriques
• Trois technologies ont été étudiées : le piézo-céramique,
le piézo-polymère (8 capteurs pour chaque technologie)
et une paire de piézo-quartz (à cause du prix).

Intervenant - date
Les travaux sur ces capteurs
• Piézo-céramique : qualité très variable, sensible à la
position latérale du véhicule. Dû la très grande différence
de précision entre capteurs, l'approche multi-capteurs
n'a pas été concluant pour cette technologie.
• Piézo-polymère (installé et étalonné par TDC),
individuellement, ce n'est pas un capteur précis. En
multi-capteurs, nous obtenons de très bons résultats.
Très sensible à la température.
• Piézo-quartz, bon capteur pour sa précision et sa
qualité. Mais le prix est très élevé. L'Evaluation du multi-
capteurs sera possible prochainement.
Intervenant - date
Le pesage par ponts instrumentés (B-
WIM)
• La technique actuelle est l'application des travaux de
Moses en 1979 qui sont fondés sur la ligne/surface
d'influence (fonction de transfert) I qui décrit le
comportement du pont supportant une charge.
• Les jauges mesurent le moment de flexion M de la
structure. M = I*P (convolution) P= charge d’un essieu.
• La technique de B-WIM est la résolution d'un problème
inverse.

Intervenant - date
SiWIM, système B-WIM Slovène
C'est le seul système commerciale de B-WIM.

Intervenant - date
SiWIM, Système B-WIM Slovène
Principe : Estimation des charges à l'aide de la ligne
d' influence.

Intervenant - date
Experimentations de B-WIM en France
-Montpellier, A9 l'aire de Fabrègues :
Route très fréquentée par les poids lourds. Route portée par un pont cadre. Evaluation du système pour la pré-sélection des poids lourds en surcharge avec 87% de bonnes détections. La précision du système est de l'ordre de 10% mais le système est peu ergonomique.

Intervenant - date
Experimentations de B-WIM en France
-Millau, A75 le viaduc de Millau:
Première expérimentation sur une dalle orthptrope en 2006 à Autreville. La technique de pose a été améliorée pour le viaduc de Millau en 2009. L'algorithme du système SiWIM n'est pas adapté à ce type de pont à cause des augets. Malgré une plus grande sensibilité locale, la précision est de 20% .

Intervenant - date
Conclusions
Plusieurs techniques de pesage ont été étudiées à
l’IFSTTAR. Aujourd’hui, la technologie des capteurs
piézo-électriques est la plus aboutie pour les
applications de contrôle et de pré-sélection.
Le pesage par pont instrumenté est une technique qui doit
encore être validée sur le terrain pour certains types de
pont. Le système SiWIM doit être plus ergonomique pour
être opérationnel.
De nouvelles techniques sont/ seront abordés : fibres
optiques ou pesage embarqué qui est une technique
présentée maintenant par Hocine Imine.

Intervenant - date
Merci pour votre attention
Ifsttar
Cité Descartes
Boulevard Newton
77420 Champs-sur-Marne
Tél. +33 (0)1 40 43 50 00
Fax. +33 (0)1 40 43 54 98
www.ifsttar.fr

Intervenant - date
Hocine Imine
Institut Français des Sciences et Technologies des Transports, de l'Aménagement et des Réseaux Laboratoire d'Exploitation, Perception, Simulateurs et Simulations
Pesage embarqué par estimation des
forces d’impact de poids lourds

Intervenant - date
• Les poids lourds constituent le principal mode de transport de fret, avec un pourcentage de 75%
• La proportion des PL est en nette augmentation et atteint 15 à 20 % du trafic
• Ils représentent 5,1 % des kilomètres parcourus
• PL trop ou/et mal chargé est l’une des causes d’accidents
Contexte
18
Développer un système économique et fiable de pesage embarqué dans les poids lourds
Conséquences : - Endommagement de l’infrastructure - Augmentation des risques d’accident - Concurrence déloyale
• Necessité de mesurer les forcex d’impact pour connaitre le comportement du PL et contrôler sa charge
Intervenant - date
Alerter et assister les conducteurs de poids lourds en cas de présence de risque de renversement du véhicule Calcul du LTR
Réduire l’agressivité des PL et protéger l’infrastructure en développant des systèmes de contrôle embarqués qui stabilisent et minimisent les forces dynamiques
Fournir au gestionnaire de l’infrastructure des outils de surveillance et de verbalisation des véhicules en surcharge
Calibration des stations de pesage en marche (WIM)
19
Objectifs et applications

Intervenant - date
Solution proposée
• Reconstitution des forces d’impact dans tous les scénarios de conduite : ligne droite et virage
• Une solution optimale en capteurs et simple à installer et à étalonner
• Exploiter les mesures en embarqué de la force d’impact pour développer des systèmes d’alerte et de contrôle actif
Intervenant - date
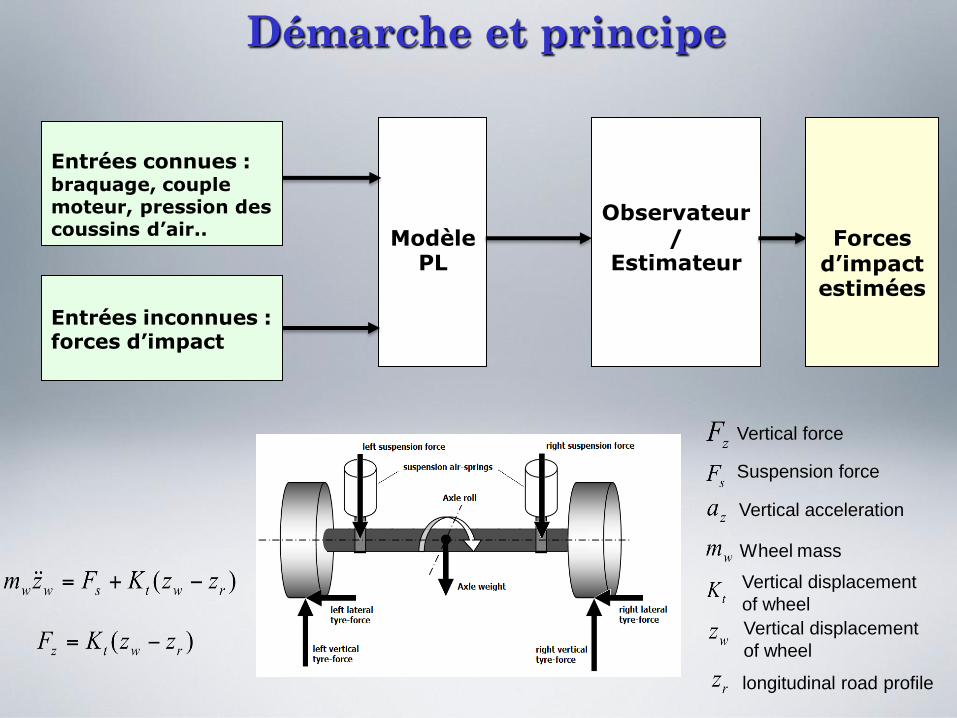
Modèle PL
Entrées connues : braquage, couple moteur, pression des coussins d’air..
Entrées inconnues : forces d’impact
Observateur
/ Estimateur
Forces d’impact estimées
Démarche et principe
Vertical force
Suspension force
Vertical acceleration
Wheel mass
longitudinal road profile
Vertical displacement
of wheel
Vertical displacement
of wheel

Intervenant - date
Expérimentation
The instrumented vehicle
1. Hydraulic jack
2. Vehicle
3. LVDT sensor
The instrumented vehicle
1. Hydraulic jack
2. Vehicle
3. LVDT sensor
1. Hydraulic jack
2. Vehicle
3. LVDT sensor
1. Control desk software 5. Accelerometers
2. Micro-Autobox 6. Gyrometers
3. Battery 7. Laser sensor
4. LVDT sensors 8. BNC connectors
1. Control desk software 5. Accelerometers
2. Micro-Autobox 6. Gyrometers
3. Battery 7. Laser sensor
4. LVDT sensors 8. BNC connectors
The acquisition material The acquisition material The installed sensors The installed sensors
1. Véhicule excité en vertical
22

Intervenant - date
Teste CERAM
23

Intervenant - date
Résultat d’estimation
24
Forces verticales: mesures et estimations
Intervenant - date
25
Australian Road Research Board (ARRB)
Accelerated Loading Facility (ALF)
Tests carried at ALF
• Two wheels
• Dual tyres
2. Expérimentation avec ALF (ARRB)

Intervenant - date
26
Instrumentation
• Strain gauges on wheel axle
• LVDT: Suspension deflection
sensors
• Air pressure transducer (APT)
• Accelerometers on wheel hub

Intervenant - date
27
• Strain gauges on wheel axle
• LVDT: Suspension deflection
sensors
• Air pressure transducer (APT)
• Accelerometers on wheel hub

Intervenant - date
28
• Strain gauges on wheel axle
• LVDT: Suspension deflection
sensors
• Air pressure transducer (APT)
• Accelerometers on wheel hub

Intervenant - date
29
• Strain gauges on wheel axle
• LVDT: Suspension deflection
sensors
• Air pressure transducer (APT)
• Accelerometers on wheel hub

Intervenant - date
30
• Repeat tests conducted at 10,
15 et 20 km/h
• Road profile not modified
• Road profile modified adding
wooden boards on the road
surface
• Test with static load of 40kN
Essais

Intervenant - date
31
Vertical forces Error distribution in %
Résultat d’estimation

Intervenant - date
Travaux en cours et futures
Prendre en compte d’autres paramètres à identifier
(inertie, amortissement..) pour améliorer la qualité de
l’estimation.
Expérimenter l’approche en temps réel sur un
tracteur/semi-remorque et validation par roue
dynamo.
Contrôle hybride par la stabilisation des forces
verticales
![Empatije [omazh 'malome-Geri'] by Dr [2003 ili… 2004]](https://static.fdocuments.fr/doc/165x107/5695cf4a1a28ab9b028d7340/empatije-omazh-malome-geri-by-dr-2003-ili-2004.jpg)