NOUVELLE ARCHITECTURE UNIFIÉE DE CONTROLE INTELLIGENT … · 2012-02-20 · ii REMERCIEMENTS Je...
278
UNIVERSITÉ DE SHERBROOKE Faculté des sciences appliquées Département de génie électrique et de génie informatique NOUVELLE ARCHITECTURE UNIFIÉE DE CONTROLE INTELLIGENT PAR SÉLECTION INTENTIONNELLE DE COMPORTEMENTS Thèse de doctorat Spécialité: génie électrique et génie informatique __________________________ François MICHAUD Sherbrooke (Québec), CANADA Novembre 1995
Transcript of NOUVELLE ARCHITECTURE UNIFIÉE DE CONTROLE INTELLIGENT … · 2012-02-20 · ii REMERCIEMENTS Je...

UNIVERSITÉ DE SHERBROOKEFaculté des sciences appliquées
Département de génie électrique et de génie informatique
NOUVELLE ARCHITECTURE UNIFIÉE DE CONTROLE INTELLIGENT PAR
SÉLECTION INTENTIONNELLE DE COMPORTEMENTS
Thèse de doctoratSpécialité: génie électrique et génie informatique
__________________________François MICHAUD
Sherbrooke (Québec), CANADA Novembre 1995
i
RÉSUMÉ
Les recherches en contrôle intelligent visent la conception de méthodologies de
contrôle permettant de reproduire des capacités intelligentes dans des systèmes
complexes. Les approches actuelles dans ce domaine exploitent partiellement
plusieurs caractéristiques associées à l'intelligence. Afin de combiner leurs
avantages respectifs, une nouvelle architecture de contrôle intelligent fut élaborée
cherchant à transmettre une plus grande autonomie à des systèmes qui doivent
interagir avec un environnement donné et y jouer un rôle. En s'aidant d'études
psychologiques sur le comportement intelligent, cette synthèse fut réalisée en
portant une attention particulière quant au respect des principes associés à
l'intelligence tels que considérés dans ces approches. Composée à la base d'une
banque de comportements, l'architecture permet de sélectionner dynamiquement les
compétences utiles et de combiner leurs actions en fonction des intentions propres du
système utilisant une telle architecture de contrôle. Ces intentions sont affectées par
la situation environnementale, les besoins du système et les connaissances innées ou
acquises sur l'environnement. Enfin, des motifs permettent au système d'évaluer son
fonctionnement de façon introspective afin d'optimiser de façon autonome ses
interactions avec l'environnement externe et ses intentions. La généralité de
l'architecture permet d'exploiter au besoin les techniques développées pour d'autres
systèmes afin d'en exploiter les forces en fonction des capacités sensorielles, d'action
et de traitement requises pour le système autonome à contrôler. Pour la thèse, la mise
en oeuvre proposée se fait principalement par logique floue et par la construction
d'un graphe topologique. Sa validation fut réalisée à partir d'un environnement
simulé de robot mobile. Les résultats démontrent l'utilité de combiner la réactivité, la
délibération et les motivations pour que des systèmes manifestent une plus grande
"intelligence" et autonomie.
i i
REMERCIEMENTS
Je tiens tout d'abord à remercier mes deux directeurs de recherche, M. Gérard
Lachiver et M. Chon Tam Le Dinh, pour m'avoir donné la latitude nécessaire pour
aborder une problématique nouvelle ainsi que pour leur support lors de la réalisation
de ces travaux. Je tiens aussi à remercier les membres du jury, M. Robert David ? M.
Kabanza ? M. Gregory Dudek de l'université McGill ?, pour leur évaluation et leurs
commentaires sur cette thèse. Je désire aussi exprimer plus particulièrement ma
reconnaissance à M. Robert David du centre de développement des A.E.O. de la faculté
d'éducation de l'université de Sherbrooke pour sa participation comme jury à mon
examen général du doctorat.
Je désire aussi remercier M. Nikolaus Almàssy de l'université de Zurich-Irchel, Suisse,
pour m'avoir laissé utiliser son logiciel de simulation de robot mobile BugWorld. Je
dois aussi souligner l'aide précieuse de M. Michel Héon et M. Marcel Lapointe lors de
l'installation de BugWorld, ainsi que M. François Côté pour le support informatique
fourni dans des moments cruciaux. Je profite aussi de l'occasion pour souligner mon
appréciation à M. Luc Martin pour les nombreuses discussions et débats que nous
avons eues sur la nature et la mise en forme de l'intelligence.
Je tiens aussi à exprimer toute ma reconnaissance au Conseil de recherches en
sciences naturelles et en génie du Canada (CRSNG) pour leur assistance financière
lors de mon doctorat.
J'exprime aussi ma gratitude à ma famille qui a su manifester leur intérêt, leur
support et leurs encouragements aux moments opportuns. Je tiens enfin à remercier
ma charmante épouse Annie pour sa compréhension, son dévouement et son attention
pour me laisser réaliser mon doctorat. C'est à eux que je dédis cet ouvrage.
iii
TABLE DES MATIERES
1. INTRODUCTION.................................................................................................................7
10.1. Section..............................................................................................................................7
10.1.9. Sous-Sections.....................................................................................................7
Annexe 1 ................................................................................................................................... 1
i v
LISTE DES FIGURES
Figure 11.11 Figure .................................................................................................................7

v
LISTE DES TABLEAUX
TABLEAU 10.1 TEST TABLEAU...............................................................................................7
v i
LEXIQUE
Activation d'un comportement: État d'un comportement disponible à réagir
aux conditions environnementales.
Agent: Système qui doit agir dans un environnement et y jouer un rôle selon en
fonction de sa politique de contrôle.
Attitude: Sentiment favorable ou défavorable éprouvé envers quelqu'un ou quelque
chose. États internes instantanés de l'agent justifiant ses décisions et son
comportement.
Besoin: Force ou pression propre à l'identité de l'agent qui la motive à adopter des
comportements particuliers.
Cognition: Faculté d'acquérir des informations et des connaissances à partir des
expériences vécues par l'agent.
Coin externe: Coin ayant un angle supérieur à 180°.
Coin interne: Coin ayant un angle inférieur à 180°.
Compétence: Synonyme de comportements du point de vue du contrôle.
Comportement: Du point de vue psychologique, un comportement est une
manifestation externe d'un individu répondant à une stimulation venue de son
milieu intérieur ou de son milieu extérieur. Du point de vue du contrôle, un
comportement est une manifestation externe désirée indiquant comment
réagir en transformant des sensations pour en obtenir des actions.
Comportement avec condition bivalente: Comportement dont les règles tentent
d'établir un équilibre dans les conditions qui l'influencent.

vii
Comportement avec condition de neutral ité: Comportement dont l'action
résultante est influencée par une conséquence neutre, ou sans force.
Comportement hautement réacti f : Comportement dont les règles ne font que
réagir à ce qui est perçu, sans tenté de trouver un équilibre des conditions ou à
neutraliser l'action conjointe des règles.
Comportement purement réacti f : Comportement hautement réactif dont les
conditions d'activation sont les mêmes que celles qu'il utilise pour réagir.
Désirabilité: Recommandation favorable à l'utilisation de comportement.
Émergence: Caractéristique associée à une fonctionnalité (ou un comportement
global) qui se manifeste de par les mécanismes internes de contrôle et les
interactions avec l'environnement, sans être explicitement contrôlée ou
spécifiée à l'interne.
Environnement: Milieu dans lequel le système doit évoluer.
État interne: États utilisés par l'algorithme de contrôle affectant la sélection de
comportements.
État topologique: Information emmagasinée dans un noeud du graphe topologique,
tirée d'une séquence de formes topologiques identifiées.
Exploitation: Caractéristique associée à un comportement qui est sélectionné et qui
réagit à l'environnement en fonction des sensations qui lui sont pertinentes.
Expression régulière topologique: Structure lexicale caractérisant l'état
topologique et la rotation obtenus par l'analyse lexicale d'une séquences de
formes topologiques au cours d'une transition.
viii
Fonctionnalité émergeante: fonctionnalité qui émerge sous forme d'effet de bord
par la dynamique interne ou l'interaction dynamique avec l'environnement.
Forme topologique: Information obtenue du comportement d'identification propre
à une interprétation symbolique de la disposition des repères aux alentours de
l'agent.
Graphe topologique: Représentation sous forme de noeuds interconnectés de la
séquence des repères topologiques construits lors du déplacement de l'agent.
Holistique: Système dans un tout qui est plus que la somme de ses parties.
Indésirabilité: Recommandation non favorable à l'utilisation de comportement.
Intent ion: Choix des comportements à utiliser avec possiblement des paramètres
internes associés à ces comportements pour fixer leurs objectifs particuliers.
Introspect ion: Étude de la conscience par elle-même, du sujet par lui-même (Petit
Larousse).
Lieu topologique: Forme topologique et le nombre de cycles ou elle fut
consécutivement identifiée.
Motif: Raison d'ordre intellectuel qui pousse à faire une chose, à agir (Petit
Larousse).
Motivation: Facteur psychologique conscient ou inconscient qui incite l'individu à
agir de telle ou telle façon (Petit Larousse).
Noeud de marque: Noeud du graphe topologique représentant un point de repère
fiable tel que perçu dans l'environnement.

ix
Noeud de transition: Noeud du graphe topologique représentant un point de repère
non fiable dans l'environnement.
Paramètre interne: Variable échangée entre le module de cognition et le module de
comportements.
Personnal i té : Ensemble des paramètres propres à la politique de contrôle et qui
détermine les particularités et les différences dans les attitudes de l'agent et
dans ses comportements émergeants.
Rationnel: Qui est fondé sur la raison, qui est déduit par le raisonnement et n'a rien
d'empirique, déterminé par des calculs ou des raisonnements, conforme au bon
sens (Petit Larousse).
Situation externe globale: Situation externe qui affecte la sélection de
comportement.
Scénario: Déroulement prévu ou souhaité du comportement résultant pour l'agent.
Stratégie de contrôle: Scénario établissant les interactions requises entre les
modules de SIR pour atteindre un but ou un comportement résultant désiré
Utilisation d'un comportement: Choix d'un comportement selon les sources de
recommandations et la sélection finale.
Valeurs: Ensemble des règles de conduite, des lois jugées conformes à un idéal et
auxquelles on se réfère (Petit Larousse).
x
ACRONYME
IA: Intelligence Artificielle
SIR: Sélection Intentionnelle de Réactions

1
1. INTRODUCTION
L'intelligence prise dans ses différentes formes fut et reste encore un sujet d'étude
important pour plusieurs sciences comme la philosophie qui s'interroge sur la nature
de l'intelligence et ce qui peut la rendre possible dans le monde réel [190], la
psychologie qui s'intéresse à l'étude de phénomènes associés à l'intelligence par
l'observation de comportements intelligents [188], et la neuroscience qui s'intéresse
aux bases anatomiques, physiologiques et chimiques des comportements [26].
Les développements technologiques survenus depuis le début du vingtième siècle
ont mené à la création d'une nouvelle discipline où l'intelligence et ses mécanismes
sont de première importance. Cette discipline est l'Intelligence Artificielle (IA), un
domaine de recherche qui connaît une des plus grandes progressions en tant que
discipline scientifique depuis son instauration à Dartmouth en 1956 [207]. Selon
Herbert Simon, un des pères fondateurs de cette discipline, l'IA est une science
empirique qui tente de reproduire des capacités intelligentes (c'est-à-dire des
capacités qui semblent nécessiter de l'intelligence lorsque réalisées par l'humain)
sur des systèmes informatiques [188]. Ces capacités peuvent être basées sur
l'observation de comportements intelligents humains, ou encore elles peuvent
arriver à des traitements complexes par la création de processus intelligents et
d'artefacts sans se concerner des caractéristiques humaines ou des notions abstraites
de l'intelligence [169, 188]. Ceci n'est qu'une définition de l'IA car il n'y a pas encore
de définition unique sur laquelle les chercheurs s'entendent [207].
La possibilité de reproduire des capacités intelligentes sur la machine permit à l'IA
d'influencer et d'être influencée par les théories associées à l'intelligence [147]. L'IA
est un domaine définit par ses problèmes et non par ses méthodes [169], ce qui
explique pourquoi les recherches en IA combinent une grande variété de sujets
2
comme la représentation des connaissances, le raisonnement, la planification, la
recherche, l'apprentissage, le traitement du langage naturel, la vision et la robotique
[207]. La diversité des recherches et les différentes perspectives associées à
l'intelligence donnèrent aussi naissance à des méthodes variées comme entre autres
les systèmes experts, les réseaux de neurones artificiels, la logique floue, les
algorithmes génétiques et le raisonnement par cas. Dès lors, il n'est pas surprenant
de trouver des contributions venant de chercheurs de différents domaines comme
l'ingénierie, l'informatique, la psychologie, la biologie, les neurosciences, les
mathématiques, la philosophie, etc. L'IA est donc un domaine pluridisciplinaire
souhaitant que l'ingénierie de systèmes artificiels permettra de mieux comprendre les
mécanismes de l'intelligence [113].
Malgré le progrès significatif réalisé en IA et par les autres domaines connexes,
l'intelligence reste une notion difficile à définir. Actuellement, aucun consensus
n'existe sur ce que constitue l'intelligence: on s'entend plutôt sur la possibilité que
l'intelligence ait plusieurs dimensions non exclusives [17]. Mais à cause de l'énormité
et du progrès rapide et croissant de la littérature scientifique entourant cette notion,
il semble nécessaire de développer un modèle conceptuel théorique de l'intelligence
qui arrive à lier les connaissances de l'intelligence dans une architecture unifiée [9].
Les théories existantes de l'intelligence sont incomplètes au lieu d'être incorrectes
[200], et leur unification dans un modèle général permettrait d'assurer une meilleure
progression de la recherche et du développement dans ce domaine [5, 53].
Les travaux présentés dans cette thèse s'intéressent aux différentes dimensions
utiles de l'intelligence pour la conception de systèmes intelligents travaillant dans
des environnements quelconques, plus particulièrement ceux étant complexes,
dynamiques et incertains. Ce genre de problématique est abordé en contrôle
intelligent [17], un autre domaine associé à l'IA, où les recherches visent la

3
conception de méthodologies de contrôle permettant de reproduire des capacités
intelligentes dans des systèmes complexes, En considérant que la réalisation de
système intelligent demande un effort interdisciplinaire qui est évolutionnaire plutôt
que révolutionnaire [15], il est donc important de repartir des approches actuelles
pour en exploiter les forces et tenter de les regrouper. Suite à une recherche dans la
littérature scientifique, il fut possible de constater que plusieurs caractéristiques
associées à l'intelligence étaient considérées dans les approches actuelles en contrôle
intelligent. Les principales caractéristiques sont l'utilisation de hiérarchie de
commandes et de sensations, la modélisation du monde, la planification, la
délibération, la distributivité, les comportements, la réactivité, l'émergence, le
jugement et les motivations. Toutefois, ces caractéristiques ne sont jamais considérées
dans leur ensemble, et pourtant chacune semble apporter une contribution
significative au comportement intelligent.
Afin de répondre au besoin d'unifier les caractéristiques associées à l'intelligence,
l'objectif de la thèse est de présenter une nouvelle architecture de contrôle qui tente
de transmettre plus d'autonomie et d'intelligence à des systèmes qui doivent interagir
avec un environnement donné et y jouer un rôle. En plus des approches actuelles en
contrôle intelligent, cette architecture s'inspire aussi des d'études psychologiques sur
le comportement intelligent pour regrouper ces caractéristiques et exploiter leurs
forces à bon escient tout en respectant leur philosophie de fonctionnement
respective. L'architecture développée est désignée par l'acronyme SIR signifiant
Sélection Intentionnelle de Réactions. Elle constitue donc une tentative dans la
détermination d'un modèle conceptuel général de l'intelligence qui considère sa
reproduction artificiel ainsi que ses principes naturels fondamentaux. Cet objectif est
aussi poursuivi par Albus [9] mais d'une manière différente.
4
Composée à la base d'une banque de comportements, l'architecture permet de
sélectionner dynamiquement les compétences utiles et de combiner leurs actions en
fonction des intentions propres à un système exploitant SIR pour son contrôle.
Puisque la généralité de SIR vise son utilisation pour des systèmes autonomes
oeuvrant dans des environnements quelconques, le terme agent est utilisé dans la
thèse pour désigner un système intentionnel [178] utilisant SIR comme politique de
contrôle.
Sommairement, SIR repose sur six modules, soit un module de comportements, trois
modules de recommandations, un module de sélection finale et un module de motifs.
Le premier module est composé d'un ensemble de comportements permettant à l'agent
de réagir aux conditions environnementales perçues. Le répertoire de
comportements vient définir les capacités d'action que peut exploiter l'agent, et que
les cinq autres modules veilleront à utiliser "intelligemment". Trois de ces modules
servent à recommander l'utilisation de comportements à partir de différents critères.
Le premier examine les conditions particulières de l'environnement pouvant affecter
le choix des comportements de l'agent. Le second ajuste le comportement de l'agent
en fonction de ses besoins propres. Le troisième module de recommandations est de
type cognitif, c'est-à-dire que des connaissances sur l'environnement peuvent alors
être exploitées pour recommander par planification ou délibération l'utilisation de
certains comportements. Cette source de connaissances est aussi influencée par la
mémorisation des interactions de l'agent avec l'environnement externe, ses modules
de recommandations et ses motifs. Toutes ces recommandations sont acheminées au
module de sélection finale qui les pondère et les unifie pour choisir les
comportements à utiliser. Enfin, le module de motifs permet à l'agent d'évaluer son
fonctionnement de façon introspective afin d'optimiser et de superviser ses
interactions avec l'environnement externe et entre ses sources de recommandations
dans l'atteinte de ses objectifs.
5
La présente thèse est structurée en trois grandes parties. Comme première partie,
le chapitre 2 présente les caractéristiques rattachées à l'intelligence telles que
considérées dans les approches en contrôle intelligent et en psychologie. Ce chapitre
tente de regrouper les visions de l'intelligence en proposant une façon plus générale
de les considérer, soit en mettant plus d'emphase sur les capacités du système à
interagir avec son environnement que sur ses caractéristiques associées à
l'intelligence ou ses mécanismes de mise en oeuvre. Le chapitre 3 suit avec la
présentation de l'architecture de contrôle SIR. L'architecture développée et ses
modules sont présentés de manière conceptuelle, découplée d'une problématique, de
techniques, de ressources particulières ou de toute autre contrainte pouvant affecter
sa généralité. La généralité est un aspect important de l'architecture car l'objectif
n'est pas de statuer sur les meilleurs principes de mise en oeuvre de l'intelligence,
mais plutôt de situer et de tirer profit de leurs apports respectifs dans un
environnement de travail unifié.
Dans la seconde partie de la thèse, le fonctionnement de l'architecture de contrôle
SIR est validé expérimentalement à partir d'un environnement simulé de robot
mobile décrit au chapitre 4. Comme expérimentation, le robot simulé (ou l'agent)
désire atteindre des cibles tout en assurant un bon niveau de charge de ses
accumulateurs et une recherche efficace de son environnement. Le robot ne possède
aucune information a priori sur son environnement, et doit se développer par lui-
même une représentation interne de son milieu à partir de ses interactions avec lui.
L'émergence au niveau de la construction de ce modèle est un aspect important
considéré lors de cette mise en oeuvre de SIR. La description de la mise en oeuvre de
chacun des modules de SIR pour réaliser ce type d'expérimentation commence avec le
chapitre 5 pour le module de comportements flous, suivi du chapitre 6 pour le module
de motifs. Ce dernier chapitre permet d'introduire la représentation utilisée pour la
formulation de recommandations par les modules de recommandations. La description

6
de ces modules suit avec le chapitre 7 pour le module de cognition basé sur la
construction d'un graphe topologique repérant les endroits perçus par l'agent, et le
chapitre 8 pour les module de situation externe globale, de besoins, et de sélection
finale, tous trois flous. Ensuite, le chapitre 9 présente les résultats
d'expérimentations.
Suite à ces expérimentations, il est possible de démontrer l'apport de l'architecture
proposée quant à l'unification de l'ensemble des caractéristiques rattachées à
l'intelligence, tant au niveau des perspectives en contrôle intelligent qu'en
psychologie. Une emphase particulière est portée sur l'introspection ou l'auto-
observation, une capacité qui s'est démontrée essentielle pour la gestion des buts et
des limiter les lacunes de l'agent lors de ses interactions avec son environnement.
Une telle capacité semble être à la base de nombreux principes associés à une
intelligence évoluée. Cette justification est présentée comme troisième et dernière
partie au chapitre 10. Les directions de recherche futures basées sur SIR y sont aussi
présentées.

7
2. CARACTÉRISTIQUES ASSOCIÉES À L'INTELLIGENCE
L'intelligence est un concept difficile à définir. Le dictionnaire Petit Larousse
définit l'intelligence en quatre points: la faculté de comprendre, de donner un sens;
l'aptitude à s'adapter à une situation, à choisir en fonction des circonstances; l'être
humain considéré dans ses aptitudes intellectuelles; et l'aptitude variable entre les
individus et les espèces à résoudre des problèmes de toutes sortes. Le qualificatif
"intelligent" peut donc avoir plusieurs significations, ce qui explique la difficulté de
la communauté en contrôle intelligent d'obtenir un consensus sur une définition de
l'intelligence [17]. En contrôle intelligent, la définition de l'intelligence varie entre
les chercheurs, allant d'une sorte de chose que les humains font presqu'en tout temps
[41] jusqu'à la capacité de raisonner, comprendre et apprendre [2] de façon autonome
[16, 17].
Afin d'être plus en mesure de comprendre les différentes dimensions de
l'intelligence et de guider l'objectif de la transmettre à la machine, une recherche fut
entreprise sur les concepts exploités à cette fin en contrôle intelligent. Suite à cette
recherche, il fut possible de constater que plusieurs caractéristiques associées à
l'intelligence sont utilisées pour tenter de la reproduire dans des systèmes. De plus,
l'étude de l'intelligence en psychologie confirme l'existence de plusieurs d'entre
elles. Toutefois, ces caractéristiques ne sont jamais regroupées dans une seule
approche, et pourtant chacune semble amener une contribution significative à
l'intelligence.
L'objectif de ce chapitre est de faire ressortir les principes utiles pour reproduire
un comportement intelligent, tels qu'exploités par les approches en contrôle
intelligent et considérés en psychologie. Ce chapitre fournit aussi une explication
sur la difficulté de définir l'intelligence, et propose une perspective plus générale

8
pour la reconnaître. Ces indications permettent de justifier le mécanisme de
fonctionnement de l'architecture SIR introduite au chapitre 3 et faisant l'objet de la
présente thèse.
2.1. L'intelligence telle que considérée en contrôle intelligent
Il existe actuellement différentes branches de recherche associées au contrôle de
systèmes. Ces branches se distinguent par le type de système qu'elles arrivent à
contrôler, ainsi que par leur mécanisme de fonctionnement. À la base, le domaine du
contrôle conventionnel exploite des méthodes mathématiques, principalement des
équations différentielles, pour contrôler des systèmes dynamiques [17] (même qu'au
début, résoudre des équations différentielles étaient considérées de l'IA [74]). Les
problèmes qui y sont abordés doivent toutefois être modélisables mathématiquement,
ce qui n'est pas toujours le cas pour des environnements complexes, incertains,
bruités, imprévisibles, de grandes dimensions, sujets à des buts multiples et subissant
des variations structurelles et paramétriques [46, 68, 142].
Pour aborder ces environnements difficilement définissables, des techniques
associées à l'IA sont utiles. Les systèmes experts [1], la logique floue [112], le
neurocontrôle [19, 20, 142] ainsi que différentes combinaisons de ces méthodes [116,
86] se sont avérées des techniques intéressantes pour résoudre différents aspects
associés à cette problématique. Elles sont toutefois plus expérimentales et plus
heuristiques que la méthode d'ingénierie en contrôle [20].
Mais comme pour les méthodes de contrôle conventionnel, ces méthodes n'arrivent
pas à elles-seules à reproduire toutes les capacités associées à l'intelligence. Elles sont
souvent fondées sur des spécifications, des ressources, des représentations ou des
problèmes technologiques particuliers. Il est donc nécessaire de développer, de façon
9
conceptuelle et le plus découplée possible des aspects technologiques, des approches
générales servant de cadre de travail pour la mise en oeuvre des systèmes
intelligents. La principale difficulté à surmonter semble être le problème de
dimensionnalité propre aux environnements complexes et dynamiques.
La reproduction de la pensée humaine demande de considérer le problème dans son
ensemble, et non toujours penser à réduire sa portée [204, 205]. Pour arriver à un
plus haut niveau d'intelligence, il existe en contrôle intelligent des approches plus
générales pour la conception de systèmes intelligents [53]. Ces approches peuvent
exploiter au besoin les précédentes méthodologies dans leurs différents modules de
traitement. Il en existe une grande variété, chacune d'entre elle portant une
emphase particulière sur des aspects particuliers de l'intelligence, principalement sa
modularité. Toutefois, les approches ne réalisent pas exactement ce découpage de la
même façon. Il est possible de regrouper les modes de découpage en quatre groupes
de principes pour la mise en oeuvre de l'intelligence: l'intelligence par niveau
hiérarchique, la décomposition par étapes fonctionnelles de l'intelligence, la
distributivité de l'intelligence et l'émergence de l'intelligence.
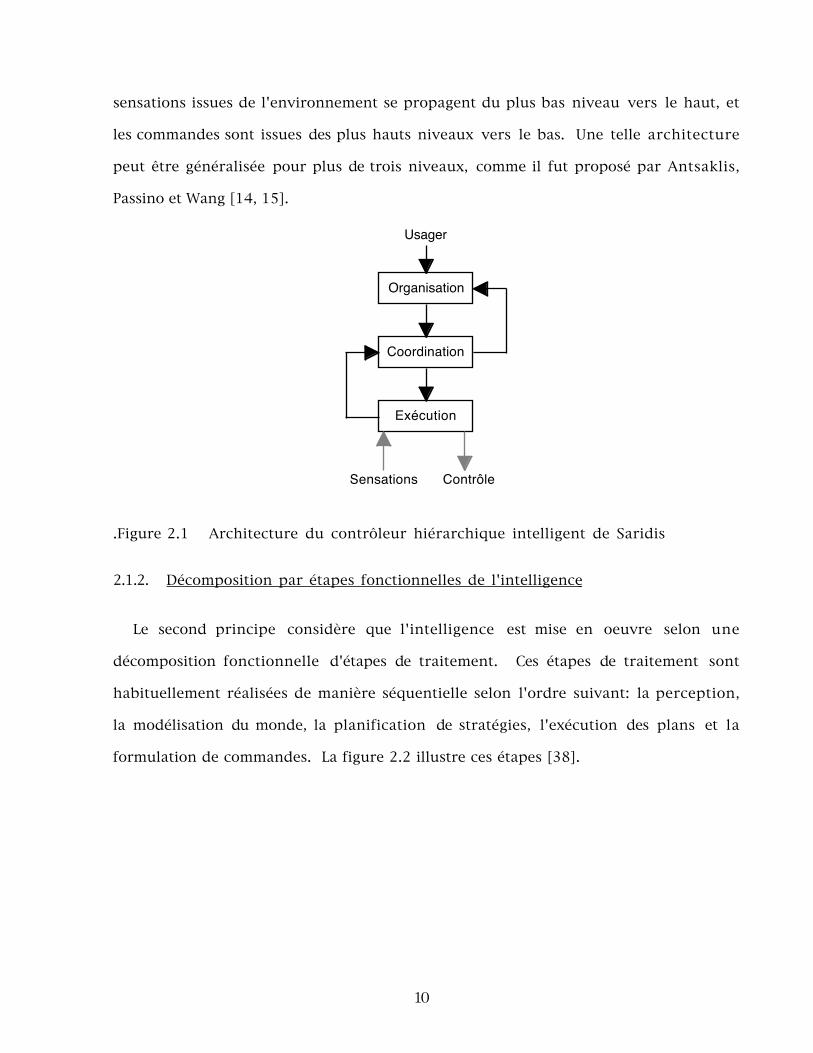
2.1.1. Intelligence par niveau hiérarchique
La mise en oeuvre de l'intelligence est considérée ici sous la forme d'une
hiérarchie de gestion selon différents horizons de décision. Une des approches les
plus connues utilisant ce principe est l'architecture de contrôle intelligent
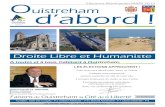
hiérarchique de Saridis [175]. La figure 2.1 illustre le principe de cette architecture.
Saridis propose une structure hiérarchique en arbre à trois niveaux selon le principe
d'intelligence croissante avec décroissance de la précision: le niveau d'exécution est
responsables des sensations et des fonctions de contrôle; le niveau organisation est
responsable de la planification et le raisonnement abstrait; et le niveau coordination
sert d'interface entre le niveau organisationnel et le niveau d'exécution. Les
10
sensations issues de l'environnement se propagent du plus bas niveau vers le haut, et
les commandes sont issues des plus hauts niveaux vers le bas. Une telle architecture
peut être généralisée pour plus de trois niveaux, comme il fut proposé par Antsaklis,
Passino et Wang [14, 15].
Organisation
Coordination
Exécution
Usager
ContrôleSensations
.Figure 2.1 Architecture du contrôleur hiérarchique intelligent de Saridis
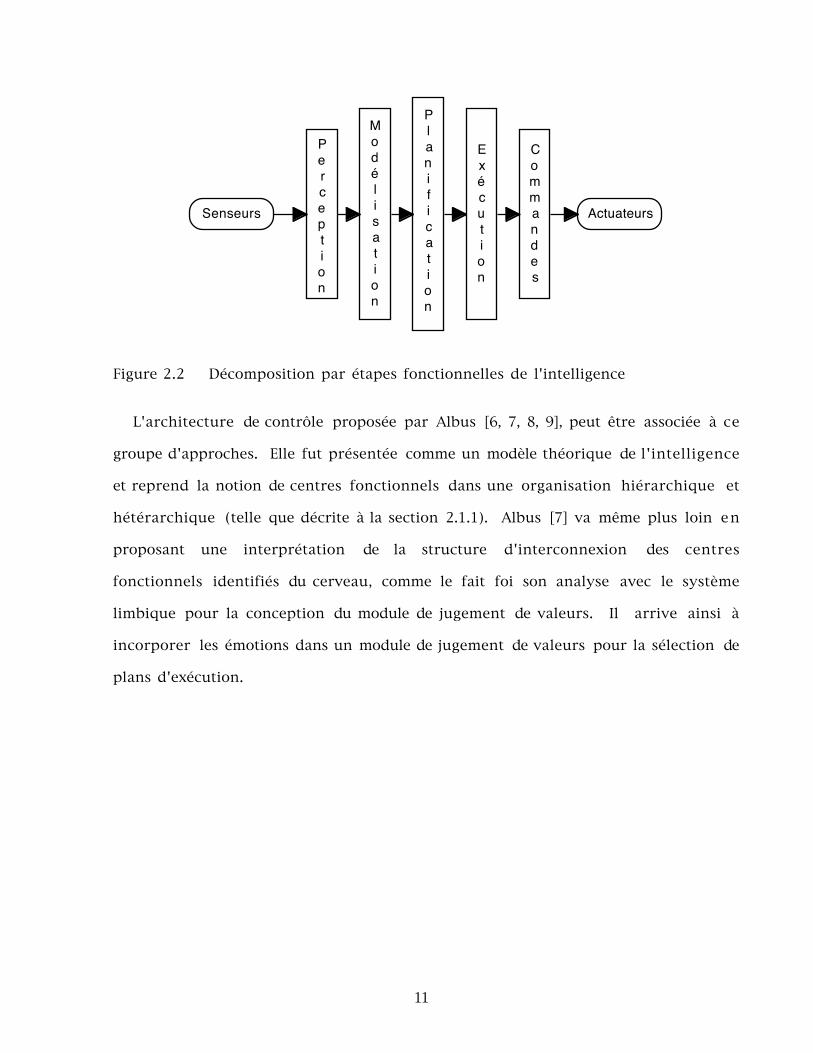
2.1.2. Décomposition par étapes fonctionnelles de l'intelligence
Le second principe considère que l'intelligence est mise en oeuvre selon une
décomposition fonctionnelle d'étapes de traitement. Ces étapes de traitement sont
habituellement réalisées de manière séquentielle selon l'ordre suivant: la perception,
la modélisation du monde, la planification de stratégies, l'exécution des plans et la
formulation de commandes. La figure 2.2 illustre ces étapes [38].
11
Perception
Modélisation
Planification
Exécution
Commandes
Senseurs Actuateurs
Figure 2.2 Décomposition par étapes fonctionnelles de l'intelligence
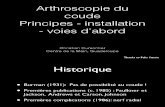
L'architecture de contrôle proposée par Albus [6, 7, 8, 9], peut être associée à ce
groupe d'approches. Elle fut présentée comme un modèle théorique de l'intelligence
et reprend la notion de centres fonctionnels dans une organisation hiérarchique et
hétérarchique (telle que décrite à la section 2.1.1). Albus [7] va même plus loin en
proposant une interprétation de la structure d'interconnexion des centres
fonctionnels identifiés du cerveau, comme le fait foi son analyse avec le système
limbique pour la conception du module de jugement de valeurs. Il arrive ainsi à
incorporer les émotions dans un module de jugement de valeurs pour la sélection de
plans d'exécution.

12
Jugement de valeurs
Traitement des senseurs
Décomposition de la tâche
ActuateursSenseurs Environnement
Modèle du monde/Base de données
Évaluationsituation
Résultatsplan.
Situationsperçues
Mise à jourEntréeprédite
ÉtatsPlans
Évaluationplan
Entréeobservée
Actioncommandée
Événements Actions
Évaluation de la situation
Planification et exécution
Figure 2.3 Modèle d'intelligence selon Albus
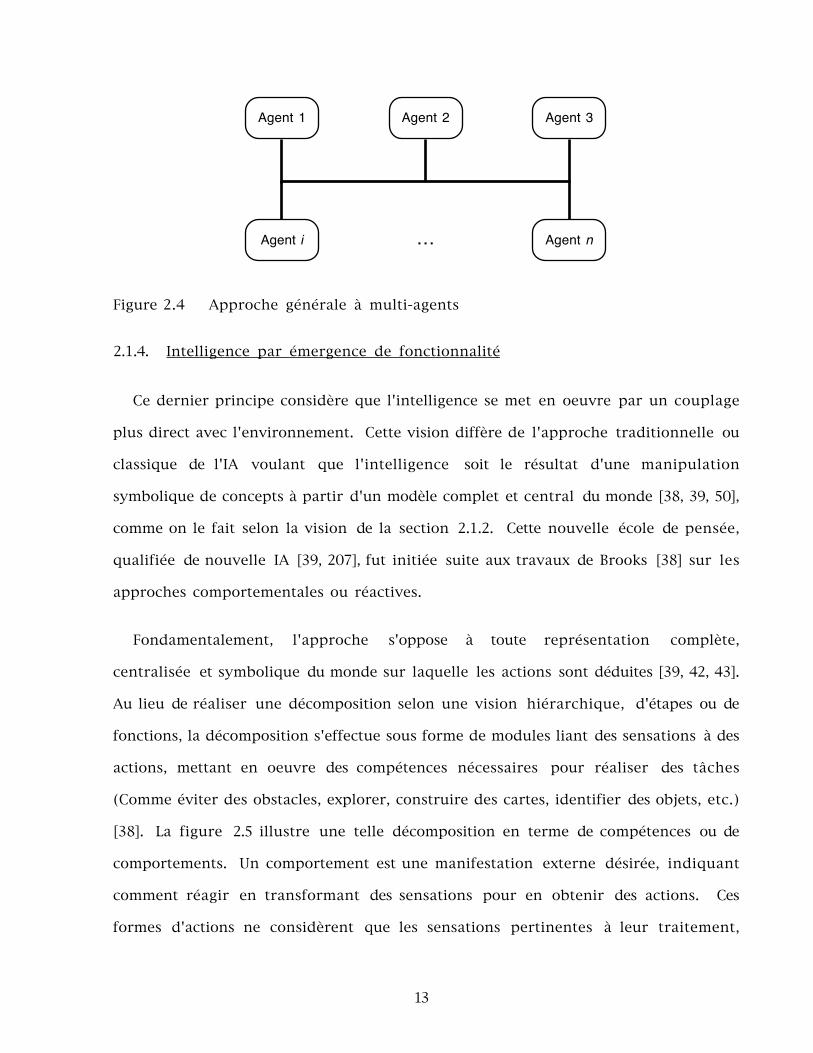
2.1.3. Intelligence par distributivité et décentralisation
Le troisième principe considère l'intelligence comme étant distribuée entre
plusieurs sources devant travailler ensemble pour résoudre des problèmes.
Contrairement à la vision présentée en 2.1.2, l'accent est placé ici sur la délibération
entre des sources ayant leurs propres intentions, objectifs ou buts. Les approches
multi-agents [213] et à tableau noir [93] font parties de ce groupe d'approches. On y
suppose que l'intelligence peut se manifester par le travail conjoint de plusieurs
agents indépendants qui communiquent entre eux et qui coopèrent pour résoudre des
problèmes. Les études dans ce domaine portent sur la collaboration, la
communication, la coopération, la gestion de conflit, la coordination et la
planification à partir d'agents indépendants pour résoudre un problème [213]. La
figure 2.4 présente l'architecture générale des approches à multi-agents. Un agent
est perçu comme une agent spécialisée ayant une fonction ou une compétence
particulière. La stratégie d'utilisation des agents et leur communication sont des
points importants dans ce genre de système [207].
13
Agent 1 Agent 2
Agent n
Agent 3
Agent i . . .
Figure 2.4 Approche générale à multi-agents
2.1.4. Intelligence par émergence de fonctionnalité
Ce dernier principe considère que l'intelligence se met en oeuvre par un couplage
plus direct avec l'environnement. Cette vision diffère de l'approche traditionnelle ou
classique de l'IA voulant que l'intelligence soit le résultat d'une manipulation
symbolique de concepts à partir d'un modèle complet et central du monde [38, 39, 50],
comme on le fait selon la vision de la section 2.1.2. Cette nouvelle école de pensée,
qualifiée de nouvelle IA [39, 207], fut initiée suite aux travaux de Brooks [38] sur les
approches comportementales ou réactives.
Fondamentalement, l'approche s'oppose à toute représentation complète,
centralisée et symbolique du monde sur laquelle les actions sont déduites [39, 42, 43].
Au lieu de réaliser une décomposition selon une vision hiérarchique, d'étapes ou de
fonctions, la décomposition s'effectue sous forme de modules liant des sensations à des
actions, mettant en oeuvre des compétences nécessaires pour réaliser des tâches
(Comme éviter des obstacles, explorer, construire des cartes, identifier des objets, etc.)
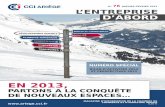
[38]. La figure 2.5 illustre une telle décomposition en terme de compétences ou de
comportements. Un comportement est une manifestation externe désirée, indiquant
comment réagir en transformant des sensations pour en obtenir des actions. Ces
formes d'actions ne considèrent que les sensations pertinentes à leur traitement,

14
permettant ainsi de déterminer ce qui est utile ou non utile pour la prise de décision.
L'ensemble de ces compétences interagissent directement avec le monde et sont
dirigées selon les situations rencontrées dans l'environnement au lieu d'avoir été
préalablement planifiées ou analysées. La fonctionnalité résultante n'est pas
spécifiée par une seule compétence mais par l'ensemble des interactions entre ces
modules et avec l'environnement perçu [119], faisant émerger un comportement.
Compétence n
Compétence 1
Compétence 2
Compétence iSenseurs Actuateurs
. . .
. . .
Figure 2.5 Décomposition comportementale de l'intelligence
L'approche comportementale est caractérisée par quatre principes fondamentaux:
le monde est son propre et meilleur modèle pour le système; le système doit faire face
au monde réel; l'intelligence est déterminée par la dynamique de l'interaction avec le
monde; et l'intelligence émerge de l'interaction de composantes du système
comportementale avec le monde et indirectement entre eux (l'intelligence est dans les
yeux de l'observateur) [41]. L'émergence de fonctionnalité est un concept très
important pour cette approche. Une fonctionnalité émergeante est une
fonctionnalité qui émerge sous forme d'effet de bord par la dynamique interne ou
l'interaction dynamique avec l'environnement [195]. Elle résulte de l'interaction de
plusieurs composantes primitives [195], soit par l'utilisation parallèle des
comportements définis pour le contrôle du système. Elle donne l'habilité de réagir de
façon flexible, tolérante aux fautes et robuste aux environnements complexes et

15
dynamiques, car aucune des composantes n'est en charge de produire cette complexité
ou est plus critique qu'une autre [120, 122, 123]. L'émergence de fonctionnalité est un
principe d'organisation important chez les systèmes vivants [122] et se manifesterait
au niveau de la navigation, la vision, l'ouïe et dans toute capacité humaine [44].
L'humain est capable de faire plusieurs choses à la fois sans avoir explicitement
modélisé toutes les combinaisons de situations possibles. Dans l'ensemble, il existe
plusieurs mécanismes qui travaillent de différentes façons desquels émergent un
comportement qui est observé et rationalisé par l'agent [41].
Avec l'approche comportementale de Brooks [38], les comportements sont mise en
oeuvre sous forme de diagramme d'états finis augmentés de certaines fonctions pour
le contrôle temporel de leur exécution [40]. Une logique binaire est alors utilisée pour
l'évaluation des règles de contrôle. De plus, les comportements sont organisés en une
hiérarchie de priorité fixe et exclusive. Les comportements abstraits et complexes
devraient normalement se trouver au sommet de cette hiérarchie. Ainsi, les
comportements les plus prioritaires peuvent prendre préséance sur les
comportements inférieurs. Il n'y a pas de fusion de commandes car un seul
comportement a le contrôle des actuateurs en tout temps. Un tel mécanisme affiche
des problèmes comme sa mise à l'échelle [29, 53, 42, 209] et l'établissement de
compromis lorsque des buts conflictuels sont présents [166]. Il existe d'autres
variantes qui tentent de corriger ces lacunes et qui sont présentées au chapitre 3.
2.2. L'intelligence telle que considérée en psychologie
L'intelligence se manifeste à différents niveaux selon le type d'espèces (ex.:
animale, humaine) et entre les individus d'une même espèce. La psychologie aborde
ces notions en étudiant les lois régissant les comportements de divers organismes ou
issus de différentes formes, comme entre autre la psychologie animale, la psychologie

16
de l'enfant, la psycholinguistique, la psychologie sociale, la psychologie cognitive,
etc.
Du point de vue humain, la psychologie considère l'individu comme une
personnalité unique composée de valeurs, de croyances, d'attitudes, de besoins,
d'habiletés, de connaissances et de comportements pour évoluer dans le monde [56].
Chaque individu est différent, et cette diversité résulte des attitudes, des
comportements, des besoins, des objectifs et de l'histoire relative à l'apprentissage et
l'expérience de chacun. On considère aussi qu'une personne dans son tout est
composée de quatre grandes dimensions [77]:
- le corps qui est le véhicule lui permettant d'évoluer dans son environnement
(par les sensations et les actions musculaires);
- les émotions qui la renseigne sur l'état de ses besoins;
- le mental composé de son savoir et de sa capacité de comprendre;
- la conscience qui représente son individualité, son essence propre (intuition,
âme).
L'information nécessaire à la gestion efficace de l'individu provient de ces sources
et leurs interrelations équilibrées [77]. L'intelligence humaine serait affectée
directement par ces dimensions. Les comportements humains, définis comme l'acte
que l'être humain exécute afin de s'adapter à une situation qui l'influence, seraient
en fait évalués par une fonction évaluant de nombreux facteurs caractérisant la
personnalité de l'individu ainsi que de divers facteurs environnementaux (Lewin
[56]). D'une même façon, les attitudes seraient affectées par des composantes
cognitive, affective et comportementale [56]. Il existe donc une perspective interne
et une perspective externe affectant la dimension comportementale de l'individu.
L'étude de la personnalité aide à comprendre, à expliquer et, ultimement, à prévoir le
comportement des individus dans diverses situations. Ainsi, dans une situation

17
donnée, les caractéristiques individuelles d'une personne l'amèneront à adopter un
comportement qui lui est propre. [56]
Comme pour la psychologie, l'IA est une science empirique où on observe un
phénomène, développe une théorie qui est ensuite comparée pour évaluer sa validité,
comme l'explique Simon [188] pour justifier son intérêt personnel en IA de par son
lien avec la psychologie. Il n'est donc pas surprenant de constater que les principes
présentés à la section 2.1 et considérés dans les approches actuelles en contrôle
intelligent ont été identifiés en psychologie. La vision hiérarchique de l'intelligence
présente des liens avec le modèle bureaucratique ou structuraliste de Weber et avec le
modèle administratif de Fayol [56], ou la considération en psychologie cognitive de
différentes échelles de temps dans le comportement humain [85]. La décomposition
par étapes fonctionnelles ainsi que la distributivité des centres d'activités ont aussi
des fondements en psychologie [113] et en neuro-éthologie [27, 100]. De plus, la
psychologie [113] et l'éthologie [177] prennent en considération la vision
comportementale de l'intelligence. Par rapport à cette vision, la notion de
comportement est utilisée en psychologie pour décrire l'acte qu'un organisme exécute
afin de s'adapter à une situation qui l'influence [56]. Les organismes vivants
manifestent des comportements variant dans leur complexité, pouvant aller du simple
réflexe aux comportements de base pour les animaux jusqu'aux comportements plus
évolués manifestés par l'humain.
2.3. L'intelligence considérée dans sa globalité
Aux sections 2.1 et 2.2, l'étude de l'intelligence telle que considérée en contrôle
intelligent et en psychologie a permis d'identifier plusieurs dimensions rattachées à
cette notion. Les distinctions entre ces dimensions expliquent pourquoi l'intelligence
est si difficile à définir. À ce point, il semble inutile de statuer sur lequel de ces

18
principes est le plus puissant ou le plus général, étant donné les différentes
perspectives associées à l'intelligence ainsi que leur justification respective au
niveau psychologique. Établir une telle discrimination maintenant et à partir de
connaissances limitées sur l'intelligence ralentirait la progression vers sa
compréhension. Chacune de ces dimensions apporte des bénéfices importants pour la
mise en oeuvre de l'intelligence dans la machine, et il serait favorable de trouver un
moyen de les exploiter adéquatement. Une meilleure stratégie est donc de les étudier
et les comprendre, déceler leurs similitudes, leurs avantages et leurs inconvénients
afin d'arriver à combiner leurs forces respectives, étant donné qu'elles semblent
toutes nécessaire à la reproduction de capacités intelligentes.
Tout d'abord, il est possible de remarquer certains liens entre les principes
présentés à la section 2.1. À la base, chacun s'accorde pour une mise en oeuvre
modulaire de l'intelligence mais selon un découpage différent. Cette modularité peut
être affectée par l'horizon de décision ou le degré d'abstraction, comme le démontre
l'utilisation de hiérarchie (augmentation de précision avec diminution de
l'intelligence) ou d'ordre entre les comportements (augmentation de la réactivité
avec diminution d'abstraction ou de la complexité des compétences). L'interaction
avec l'environnement est aussi un aspect primordial pour chacun, soit pour la
formation d'un modèle, établir des plans, formuler des hypothèses ou pour réagir aux
circonstances perçues. Enfin, la réactivité est en fait une capacité qui peut être
utilisée par chacun de ces principes [10, 91, 163]
Une autre façon de les exploiter est d'énumérer les caractéristiques de
l'intelligence considérées par ces principes et ces études. Les principaux sont
l'autonomie, l'apprentissage, l'adaptation, la perception, le raisonnement, la
modélisation, la planification, la délibération, les buts, les besoins, les comportements,
la réactivité, l'émergence, la motivation, l'émotion et le jugement. Elles peuvent aussi

19
se recouper ou s'influencer, comme on peut le croire pour l'émergence, la motivation
et les émotions face aux buts, aux besoins et à la planification. Toutefois, la réunion de
toutes ces caractéristiques n'est pas une condition essentielle pour pouvoir qualifier
un système d'intelligent. (comme par exemple l'apprentissage [9]). Ces
caractéristiques peuvent aussi être utilisées pour caractériser le niveau
d'intelligence manifesté par des organismes: réactivité et comportements pour une
intelligence peu évoluée, jusqu'à la délibération et le jugement pour une intelligence
plus évoluée. Dans la même optique, l'émotivité est une des caractéristiques
proportionnellement plus développée (comme le langage et la cognition) qui
distingue l'humain des espèces animales [165]. Mais encore là, une telle classification
n'est pas communément reconnue, et il est difficile d'établir une discrimination ou
une échelle de niveau d'intelligence basée sur ces caractéristiques. Pour définir un
comportement intelligent, c'est le comportement résultant qui compte, et non la
nature des mécanismes qui l'a produit [134].
De la même façon, il existe plusieurs théories de l'intelligence. Par exemple, il y a
le modèle de Gordon Bower qui voit le cerveau comme un système de traitement de
l'information considérant les talents, les buts et valeurs, les types de mémoire et un
mécanisme d'attention et de décision selon des plans [89]. Il y a aussi la théorie
triarchique de Sternberg [200] voyant l'intelligence comme une activité mentale
dirigée vers l'adaptation intentionnelle, la sélection et la mise en forme des
environnements pertinents à la vie d'un individu. De plus, un grand nombre de
définitions de l'intelligence ont aussi été formulées par les chercheurs en contrôle
intelligence [17]. Pour guider la conception d'une approche de contrôle qui considère
l'ensemble des dimensions de l'intelligence relevées dans cette thèse, une définition
générale de ce qu'est l'intelligence fut aussi élaborée. Cette définition considère que
l'intelligence est un mécanisme auto-organisé de l'information capable de s'adapter
de façon autonome à des environnements changeants et possiblement inconnus. Ce
20
mécanisme non pré-déterminé arrive à choisir les étapes de résolution pas forcément
dictées par la logique mais plutôt par l'évidence, et d'en formuler un ensemble de
conclusions compatibles. C'est aussi un processus reproductible avec variations
pouvant réagir, comprendre, organiser, évaluer, mémoriser, apprendre, innover et
créer de façon autonome. Toutefois, une telle définition de l'intelligence risque à
nouveau de ne pas réaliser le consensus désiré car elle tente d'énumérer l'ensemble
des caractéristiques associées à l'intelligence. Alors comment est-il possible de
définir l'intelligence?
Au lieu de mettre l'emphase sur les caractéristiques requises pour reproduire
l'intelligence, il est plus efficace de définir l'intelligence à partir de la dynamique du
système avec son environnement. Que l'environnement soit simple et modélisable ou
encore qu'il soit complexe, dynamique et bruité, c'est à partir des interactions entre le
système et son environnement qu'il est possible de mesurer l'intelligence du système.
Le système et son environnement ne peuvent être décrits séparément: chacun est
formé et forme l'autre.
Cette vision pour évaluer l'intelligence est avancée par plusieurs chercheurs.
Simon a indiqué en 1956 que le comportement rationnel dépend des caractéristiques
de l'organisme mais aussi de son environnement [185], et ensuite en 1969 que le
comportement complexe d'une puce pourrait être une simple réflexion de son
environnement et non de sa complexité interne [187]. Pour McFarland et Bösser [134],
l'intelligence est difficile à définir car elle serait liée à l'adaptation aux changements
dans l'environnement [134]. Pour sa part, Steels [197, 198] indique qu'il n'est pas
possible de comprendre l'intelligence en focussant sur les structures et les processus
qui déterminent causalement un comportement observable. La tendance à étudier un
phénomène complexe en observant ses sous-composantes n'est pas valable [197, 198,
204, 205]. Une partie de l'explication de l'intelligence viendra d'un point de vue
21
holistique considérant la dynamique d'interaction entre les structures et les
processus dans l'environnement, et le couplage entre les différents niveaux [197,
198]. Il y a aussi Smithers [191, 192] qui croit que la dynamique des interactions du
système avec son environnement influence directement l'intelligence: la réalité du
système est créée en conséquence directe avec ses interactions avec son
environnement. Enfin, Pfeifer [158] indique que la considération de la dynamique
d'interaction entre le système et l'environnement semble être une contrainte
essentielle pour l'unification du monde de la cognition et des techniques pour les
agents autonomes, afin d'y préserver l'émergence.
Cependant, il ne faut pas oublier que la dynamique entre le système et
l'environnement dépend des capacités propres au système. Pour la présente thèse,
quatre hypothèses sont formulées concernant la nature de ces capacités:
- capacités de perception et d'action dans le monde. On ne peut séparer
l'intelligence du corps [83]: il existe une double influence entre la perception et
l'action qui influence directement les interactions du système avec son
environnement: ce qui est perçu influence directement les actions prises, et les
actions prises influencent ce qui est perceptible par le système. Ainsi,
l'utilisation de capteurs IR, de sonars ou d'une caméra peuvent influencer
l'intelligence manifestée par le système, tout comme la commande précise des
moteurs ou leur rapidité avec lesquelles ils arrivent à déplacer le système;
- capacité de traitement interne. Le système possède des ressources internes
limitées mais qui doivent être suffisantes pour la prise de décisions
"intelligentes". Pour l'humain, le cerveau et le système nerveux sont
responsables de cette capacité. Pour un système informatique, le processeur et
l'espace-mémoire disponible ont un impact important sur la capacité du système
de prendre des décisions avec la rapidité et la précision requise pour qu'il puisse
oeuvrer adéquatement dans son milieu de travail;

22
- capacité de décision. Un système qui possède un grand nombre de capteurs,
d'actuateurs, ainsi qu'un mécanisme de calcul performant peut être incapable de
manifester à des comportements intelligents s'il n'est pas en mesure de prendre
de bonnes décisions. L'utilisation qu'il fait de l'information disponible pour la
prise de décision est un facteur influençant directement la capacité du système à
agir intelligemment dans son environnement. L'algorithme interne de décision,
la mémorisation, la formation de connaissances, le raisonnement à partir de ces
connaissances et l'apprentissage sont des facteurs influençant à ce niveau.
En considérant l'ensemble de ces capacités, il est possible de comprendre qu'un
système a sa propre réalité en fonction de ses capacités de perception, d'action, de
traitement et de prise de décision, chacune étant à la base de ses interactions avec son
environnement. Toute limitation ou avantage au niveau de ces capacités affecteront
l'intelligence du système. De cette façon, un papillon de nuit qui fuit son prédateur
une chauve-souris [134] peut être à juste titre qualifié d'intelligent autant que
l'humain qui arrive à piloter un avion. De même, il est possible de comprendre
pourquoi il est difficile de définir l'intelligence, d'établir une classification à partir
des caractéristiques associées à l'intelligence, ou de retrouver l'ensemble de ses
caractéristiques dans un système pouvant être qualifié d'"intelligent", qu'il soit
naturel ou artificiel. L'objectif maintenant est plutôt de proposer une architecture
unifiée de contrôle permettant de combiner au besoin l'ensemble de ces dimensions,
ces caractéristiques, et des mécanismes pour leur mise en oeuvre. Et c'est suivant ces
critères référentiels de l'intelligence concernant l'environnement et les capacités du
système qu'il sera possible d'évaluer si l'architecture arrive à mettre en oeuvre un
bon niveau d'intelligence.

23
3. DESCRIPTION DE L'ARCHITECTURE DE CONTROLE INTELLIGENT SIR
La mise en oeuvre des principes présentés au chapitre 2 par les approches en
contrôle intelligent confirme la possibilité de transmettre des capacités de plus en
plus intelligentes à des systèmes. Mais pour accroître davantage le niveau
d'intelligence manifesté par la machine, l'ensemble de ces principes doivent être
regroupés dans une architecture unifiée, comme le souhaite plusieurs chercheurs en
contrôle intelligent [5, 9, 53]. Ce regroupement doit se faire en respectant les
hypothèses fondamentales de chacun, sous forme d'une vraie synthèse intellectuelle
et non par du simple "copier et coller" afin d'atteindre la vraie intelligence (Werbos
[17]). Un des principaux problèmes à résoudre est d'utiliser des méthodes conçues
pour des problèmes spécifiques dans une niche d'applications différente considérant
des environnements complexes, dynamiques et non structurés.
Comme solution possible, il existe actuellement des approches qui tentent de
combiner les techniques de délibération utilisées en IA traditionnelle avec celles
réactives de l'IA nouvelle. La planification est un champ de recherche important en
IA [193] et en robotique [180]. Mais les interactions avec le monde ne peuvent pas
toutes être prévisibles ou modélisées à cause de la diversité des situations dans des
environnements réels, d'où l'utilité de la réactivité. Les approches purement
réactives ont démontré leur efficacité à contrôler des systèmes oeuvrant dans des
environnements réels difficilement modélisables ou prévisibles. Par contre, elles
sont incapables de formuler et de poursuivre des buts à long terme [85] (car elles sont
constamment poussées par le monde [26]), ou encore de planifier, de prévoir et de
raisonner symboliquement [139]. Ces approches sont qualifiées d'approches
hybrides [45]. Les approches hybrides sont jugées nécessaires pour balancer les
contraintes de raisonnement en temps réel et celles de délibération [73]. Le couplage
de ces deux aspects doit cependant se faire avec précaution car ils peuvent être

24
incompatibles s'ils ne sont pas correctement combinés. Il existe plusieurs de ces
approches "hybrides":
- L'approche RAP de Firby [65, 66], ATLANTIS de Gat [74, 75], 3T de Bonasso et al. [35,
36], CIRCA (très similaire à la vision 3T) de Musliner et al. [140, 141], IRVS de
Wang et Lever [211], de Salichs et al. [174] et celle de Noreils et Chatila [144] sont
des approches combinant la réactivité à la délibération par l'utilisation d'une
structure hiérarchique affichant des similitudes avec la vision de Saridis;
- L'architecture TCA de Simmons et al. [183] utilise des modules de perception, de
planification, de contrôle central et de modèle du monde, capable de réagir aux
changements dans l'environnement. Le système PRS de Georgeff [76] peut aussi
faire partie de ce genre d'approche hybride;
- La réactivité est aussi considérée au niveau des approches multi-agents [182, 81,
213] et à tableau noir [64, 93]. Les connaissances peuvent alors être de type
symbolique et réagir à des événements internes délibérés. Parmi ces approches,
celles de Fehling et al. [63], Kohout [104, 105] et AIS de Hayes Roth [82] sont
formulées comme étant des architectures générales pour l'intelligence;
- Il existe aussi des approches plus proches de la vision comportementale et qui
cherchent à combiner la réactivité au raisonnement symbolique. Il y a des
approches comme SOMASS de Malcolm et Smithers [126], SSS de Connell [49, 52] et
celle de Mataric [128] qui utilise des comportements d'identification pour réaliser
une interface entre les comportement et une représentation symbolique ou
abstraite. D'autres utilisent des mécanismes de diffusion et de champs de
gradient [18, 72, 194, 151] basés sur des cartes connues de l'environnement et des
buts par rapport à celles-ci. Il y a aussi les travaux de Kaelbling [95, 97], de
Saffiotti et al. [170, 171, 172], de Donnart et Meyer [57] et de Wavish [212] qui font
partis de cette catégorie.

25
Aucune de ces approches n'arrive à combiner l'ensemble des caractéristiques et
des dimensions associées à l'intelligence telles que présentées à la section 2.3. Ce
chapitre propose la nouvelle architecture de contrôle intelligent SIR qui tente d'y
arriver. SIR sert de schéma conceptuel identifiant clairement le rôle de chacune des
fonctionnalités associées à l'intelligence dans une architecture unifiée. Elle tente de
spécifier la nature de l'intelligence en terme du monde externe, du monde interne et
de leurs interrelations, comme le souhaite Sternberg [200] pour une théorie de
l'intelligence. De plus, SIR permet d'aborder tout type d'environnement (comme le
veut Wilson [214]) en spécifiant que l'architecture conceptuelle ultime évite de faire
cette partition et est en mesure, selon ses différents niveaux de gestion, d'attaquer
tout genre d'environnements. La section 3.1 présente les fondements de
l'architecture, suivit de la section 3.2 qui donne une description plus détaillée de ses
modules et de leurs caractéristiques.
3.1. Principes fondamentaux de SIR
L'architecture proposée a pour but de transmettre une forme d'intelligence à des
systèmes autonomes qui doivent interagir avec un environnement donné et qui
doivent y jouer un rôle. Les prémisses de Brooks sur l'intelligence [41] ont incité
l'utilisation de comportements (ou compétences) pour bâtir un mécanisme
d'intelligence. SIR fait donc partie des approches de contrôle pour les agents situés
[120, 167] et autonomes [199]. Mais si on suppose que des comportements se trouvent à
la base des capacités intelligentes, qu'est-ce qui influence les comportements?
L'intelligence n'est certainement pas seulement que réactive et il en existe
certainement une dimension plus évoluée et propre à l'individu. Les principes et les
hypothèses fondamentales sur lesquels reposent SIR sont présentées dans les deux
prochaines sous-sections.
26
3.1.1. Principes de base pour la mise en oeuvre d'une intelligence dans SIR
Cinq principes sur la nature de l'intelligence ont été considérés dans la conception
de SIR:
- Des comportements ou des compétences se trouvent à la base du mécanisme
d'intelligence. Un système est en mesure de réagir et de fonctionner dans le
monde en fonction de son répertoire de comportements. Ces comportements
permettent de contrôler les actions du système et d'identifier des formes dans
l'environnement. Leur réactivité assure une gestion appropriée des
imprécisions dans l'environnement et dépend des conditions perceptuelles
particulières à chacun;
- L'intelligence est fonction du contexte. Le contexte est l'ensemble des
circonstances qui accompagnent un événement. La détermination appropriée
de ces circonstances et la capacité de réagir efficacement face à ces
circonstances semblent être des composantes importantes pour l'intelligence et
l'autonomie. Selon Zeleny [219], rien n'a lieu hors d'un contexte: je suis moi et
ma circonstance. Le contexte est important pour expliquer pourquoi un
comportement peut être intelligent dans une situation, et non pour une autre
[200];
- L'intelligence émerge holistiquement. L'intelligence ne peut être le produit
d'un traitement complètement décrit et expliqué: elle doit plutôt se manifester
holistiquement de par l'interaction entre ses constituants. Le holisme est jugé
comme une propriété importante par Simon [187] et Zeleny [220], et serait
rattachée à la notion d'émergence [134, 198, 197]. On cherche alors des
mécanismes d'organisation qui permettent au système de traiter par lui-même la
continuelle nouveauté de l'environnement. La dimension considérée ici est
l'interaction entre le système et l'environnement [123] pour faire émerger une
fonctionnalité quelconque;

27
- L'auto-observation est à la base de l'intelligence. L'humain peut s'observer et
raisonner sur son fonctionnement, ses réactions, ses interactions avec
l'environnement et avec les autres individus, sur les étapes qu'il a réalisé pour
résoudre un problème et même apprendre (par renforcement par exemple) de
ces observations. L'intelligence s'observe agir, penser et réagir. Pour y arriver,
Kiss [103] spécule que la machine doit avoir un notion d'être ou de soi, que sa
référence doit se faire par rapport à elle-même. Sur ce point, McCarthy [132]
croit que la conscience de soi, l'introspection, est essentielle pour le niveau
d'intelligence humain et n'est pas simplement un phénomène secondaire
(epiphenomenon). Une telle capacité introspective permettrait au système
d'évaluer l'impact de ses réactions et de son environnement sur sa propre
identité afin de réajuster ses comportements pour que ses besoins les plus
profonds soient satisfaits. Il ne suffit pas d'observer le comportement pour le
comparer avec un modèle du monde (comme le fait [64]), mais plutôt par rapport
à un modèle de soi;
- L'intelligence ne peut se manifester que lorsqu'un bon niveau d'autonomie est
présent. L'intelligence est propre au système. Le système doit s'inquiéter de
d'autres choses que d'être réactive [179] en considérant les besoins, les buts et les
contraintes dans sa prise de décision. Lorsque ceci est réalisé de façon autonome,
alors l'intelligence devient une propriété du système au lieu d'être la propriété
du concepteur [15, 199]. Pour être autonome, le système doit être en mesure de
développer lui-même ses stratégies pour réguler son comportement [199]. Sans
entrer dans les débats sur les niveaux d'autonomie permissibles pour les
systèmes artificiels [36, 92, 136, 140], on peut indiquer que l'autonomie possède
un caractère multidimensionnel [136] influencé par des motivations (internes ou
externes) et par les connaissances propres au système sur lui et sur le monde.

28
Chacun de ces principes s'influencent entre eux pour la mise en oeuvre de
l'intelligence, un peu suivant une dépendance similaire à l'ordre de présentation de
ces hypothèses. Un principe qui demande d'être décrit davantage est l'émergence.
Pour avoir un comportement émergent, il ne faut pas tenter de définir directement
des connaissances dans le système mais plutôt focusser sur le système et sa relation
avec son environnement pour que le comportement émerge par auto-organisation
[156]. Parmi l'ensemble des recherches considérant l'émergence comme une
propriété fondamentale des systèmes, il fut possible d'identifier différents niveaux
d'émergence:
- Émergence de par l'exploitation de différents comportements de façon
simultanée et sans séquencement pré-déterminé ou de contrôle central. Le flux
de contrôle lors de l'exécution est dirigé par la réactivité des comportements à
l'environnement;
- Émergence de par les interactions entre les comportements en employant une
structure d'arbitration en sortie pour l'affectation des actions aux actuateurs
[102] (propre à la macro-analyse [42]). Dans les approches actuelles, ce
mécanisme d'interaction peut se généraliser à quatre opérations [48]: une somme
indépendante [130, 196, 199], une combinaison (floue comme dans [115, 170, 171,
218], ou par réseau d'activation comme dans [151, 166, 208]), une suppression [38,
48] et une séquence. Enfin, Puente, Salichs et al. [162, 174] proposent un
mécanisme de fusion par combinaison linéaire des commandes issues des
comportement en fonction d'un superviseur heuristique, flou, à renforcement
ou par réseaux de neurones artificiels;
- Émergence structurelle propre à la sélection dynamique de comportements.
Avec l'approche de Brooks [38], toutes les compétences du système ne sont pas
toujours requises pour gérer les interactions avec l'environnement, et une telle
stratégie pré-programmée semble difficile à gérer pour l'utilisation d'un grand

29
répertoire de comportements [42]. Elle ne suffit pas toujours pour des systèmes
qui ont plusieurs travaux à faire dans des environnements où les opportunités
pour les réaliser varient considérablement [122]. Plusieurs approches tentent de
corriger cette lacune, comme celle de Bellingham et Consi [29] qui sélectionne
les comportements dans une librairie selon une table de transition d'états; celle
de Maes et Brooks [121] en faisant apprendre aux comportements quand ils
doivent être activés; celle de Maes [122] qui les sélectionne selon les motivations
internes et les circonstances externes; celle de Parker [148, 149] qui choisit des
groupes de comportements en fonction des motivations et des informations
communiquées; ou celle de Saffiotti, Ruspini et Konolige [170] qui influence le
choix des comportements par un planificateur et un module perceptuel;
- Émergence par modification interne de la réactivité des comportements. La
première approche de Brooks [38] et celle de Connell [50, 51] exploitent un tel
principe en utilisant des messages inter-comportements. D'autres transmettent
des buts aux comportements comme le fait Saffiotti et al. [170, 171], ce qui affecte
la fonctionnalité émergente. L'approche de Malcolm et Smithers [126] utilise
aussi ce type d'interface;
- Émergence au niveau du raisonnement et des représentations. L'utilisation
d'une représentation analogique [72, 194], la formation de proto-symboles [44] et
l'élaboration d'une cognition située [47] sont des aspects rattachés à cette
dimension de l'émergence.
Pour atteindre l'objectif d'unification, toutes ces formes d'émergence doivent être
considérées dans SIR. Les notions de répertoire de comportements, leur fusion et leur
sélection ainsi que le contexte sont des notions identifiées par les études en neuro-
éthologie de Beer et al. [27, 28]. Ils indiquent que le changement entre comportement
dépend des conditions environnementales et de l'état interne. Étant donné qu'il est
impossible de prévoir toutes les circonstances que peut rencontrer un système lors
30
d'interaction à long terme avec l'environnement, il doit être capable d'adapter avec
flexibilité son répertoire de comportements selon les contingents instantanés qui
surviennent sans qu'on lui mentionne explicitement ce qu'il doit faire dans chaque
situation. L'organisation peut changer selon le contexte comportemental, et les
comportements peuvent s'entrelacer pour rendre difficile la distinction des
changements entre eux. Enfin, il soulève l'importance de comprendre l'émergence
dans l'évolution des processus cognitifs [26].
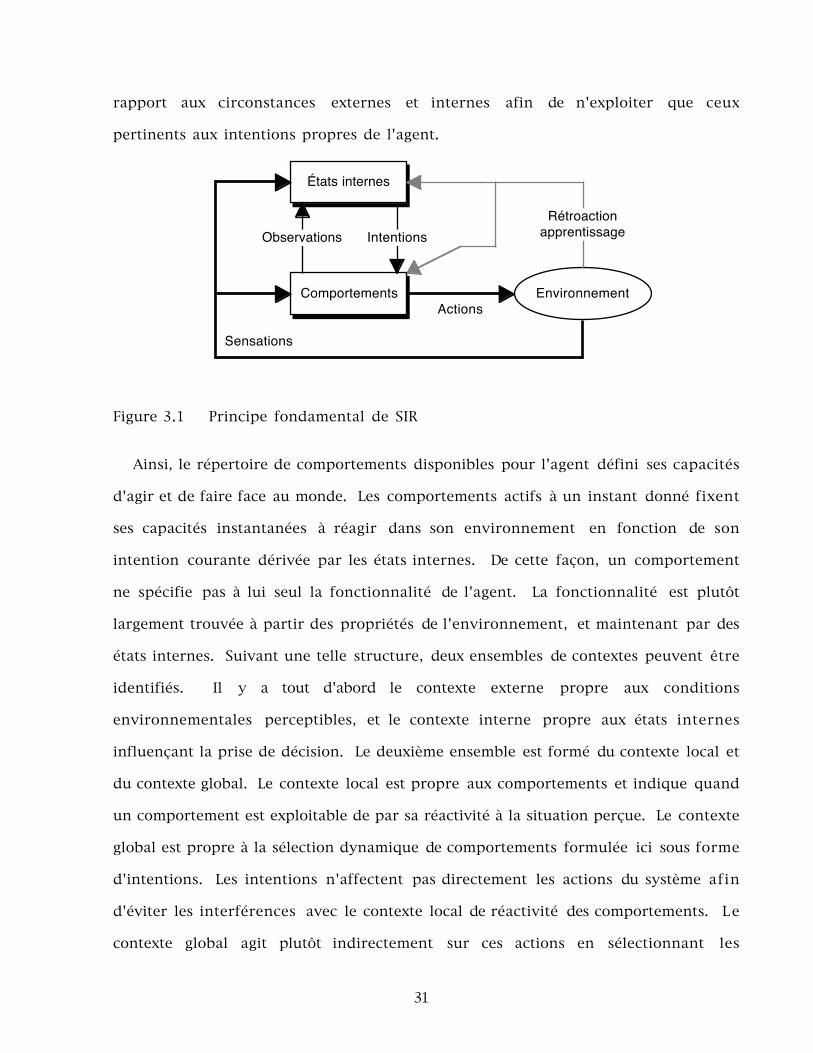
3.1.2. Description générale de SIR
Fondamentalement, SIR correspond à une simple extension de l'approche
comportementale en permettant d'utiliser des états internes pour influencer le choix
et le fonctionnement des comportements du système. La figure 3.1 illustre cette
extension. Des comportements se trouvant à la base de la boucle externe de contre-
réaction assurent le contrôle des actuateurs. Les comportements choisis dictent ainsi
les réactions de l'agent dans son environnement. Pour choisir ces comportements, le
module de traitement des états internes observe la situation environnementale ainsi
que ses choix comportementaux. L'observation des comportements sert de base pour
l'aptitude introspective de SIR, permettant à l'agent d'évaluer ses capacités d'interagir
et de se familiariser avec son environnement pour une plus grande autonomie. Cette
boucle interne de contre-réaction permet à un agent utilisant une telle approche de
formuler de façon autonome ses intentions, soit le choix et le fonctionnement des
comportements, et affecte ainsi la manière qu'il réagira aux circonstances
environnementales rencontrées. Une telle architecture est similaire en principe
avec les techniques du contrôle adaptatif où la boucle externe de contre-réaction est
rapide et sert à éliminer les perturbations d'états, tandis que la boucle interne
d'adaptation sert à gérer les perturbations structurelles à un rythme plus lent [1, 68].
Avec SIR, la boucle d'adaptation évalue l'utilité des comportements disponibles par
31
rapport aux circonstances externes et internes afin de n'exploiter que ceux
pertinents aux intentions propres de l'agent.
Comportements
États internes
IntentionsObservations
Environnement
Rétroactionapprentissage
Sensations
Actions
Figure 3.1 Principe fondamental de SIR
Ainsi, le répertoire de comportements disponibles pour l'agent défini ses capacités
d'agir et de faire face au monde. Les comportements actifs à un instant donné fixent
ses capacités instantanées à réagir dans son environnement en fonction de son
intention courante dérivée par les états internes. De cette façon, un comportement
ne spécifie pas à lui seul la fonctionnalité de l'agent. La fonctionnalité est plutôt
largement trouvée à partir des propriétés de l'environnement, et maintenant par des
états internes. Suivant une telle structure, deux ensembles de contextes peuvent être
identifiés. Il y a tout d'abord le contexte externe propre aux conditions
environnementales perceptibles, et le contexte interne propre aux états internes
influençant la prise de décision. Le deuxième ensemble est formé du contexte local et
du contexte global. Le contexte local est propre aux comportements et indique quand
un comportement est exploitable de par sa réactivité à la situation perçue. Le contexte
global est propre à la sélection dynamique de comportements formulée ici sous forme
d'intentions. Les intentions n'affectent pas directement les actions du système afin
d'éviter les interférences avec le contexte local de réactivité des comportements. Le
contexte global agit plutôt indirectement sur ces actions en sélectionnant les
32
comportements jugés utiles ou en leur communiquant des paramètres, et considère
plutôt la fonctionnalité émergente résultant de l'exploitation des comportements
activés. La formulation d'intentions permet donc de réaliser une reconfiguration
contextuelle des comportements en tentant d'éviter les conflits potentiels, et ces
comportements réagissent selon leur contexte local pour assurer l'émergence de la
fonctionnalité souhaitée.
Il fut indiqué à la section 2.2 que les comportements d'un individu sont affectés par
sa personnalité et la situation environnementale. En utilisant des états internes, S IR
donne une forme de personnalité propre à l'agent afin qu'il soit en mesure d'assurer
de façon autonome ses interactions avec son environnement. Une personnalité est
définie en psychologie comme l'ensemble des traits d'origine héréditaire et sociale
qui sont relativement stables chez l'individu adulte et qui déterminent les
particularités et les différences dans les attitudes et dans les comportements [56].
Cette personnalité considérée au niveau des états internes permet de transmettre à
l'agent des motifs, des connaissances et des besoins qui le motiveront à réaliser des
objectifs et à formuler de façon autonome ses intentions. De la même façon, le fait de
choisir parmi un ensemble de comportements qui travaillent de façon autonome
permet de fixer le focus d'attention (propre aux comportements choisis) en fonction
de l'intention, concept jugé important par Meystel [17], et Selfridge et Franklin [179].
Ceci rejoint aussi les études psychologiques de la perception qui indiquent qu'elle est
influencée et qu'elle influence la personnalité, les attentes, les attitudes, les besoins,
les motivations, les sentiments, les états émotifs, les valeurs et les comportements des
individus [56]. Cette influence se manifesterait par l'interprétation, l'organisation et
la sélection [56], et c'est pourquoi on la retrouve ici tant au niveau des comportements
qu'au niveau des états internes.
33
Enfin, les aspects de la personnalité d'un individu peuvent être innés ou acquis,
l'affectant simultanément et de façon continue [56]. L'aspect inné de la personnalité
de l'agent utilisant SIR est transmis par le concepteur. L'aspect acquis de la
personnalité peut être obtenu par les observations et les connaissances qu'il dégage
de ses interactions avec l'environnement, ou par l'apprentissage des mécanismes de
contrôle, soit au niveau des états internes ou des comportements, à partir de signaux
de rétroaction d'apprentissage. Toutefois, l'apprentissage à partir de signaux de
rétroactions ne sera pas un aspect considéré dans la thèse qui veille plutôt à étudier
les mécanismes requis au niveau des comportements et des états internes dans SIR.
3.2. Description détaillée de SIR
Une description plus complète de SIR demande une description plus détaillée du
module d'états internes et de son mécanisme de sélection de comportements. Pour
pouvoir combiner l'ensemble des caractéristiques associées à l'intelligence, plusieurs
aspects doivent être considérés au niveau des états internes comme par exemple la
délibération, la planification, les motivations, les besoins et les buts. De plus, le
couplage de ces concepts avec les comportements doivent se faire de façon à
préserver l'émergence de fonctionnalité au niveau comportemental et sous toutes ses
dimensions. Le module d'états internes et le module de comportements furent donc
décomposés en modules permettant de considérer l'ensemble de ces aspects.
L'architecture détaillée de SIR est illustrée à la figure 3.2. Le module de
comportements se trouvent bien à la base du mécanisme de contrôle, permettant à
l'agent de réagir aux conditions environnementales perçues. Le concepteur transmet
ainsi les manifestations externes de base requises à la machine. Un mécanisme de
fusion d'actions, possibilité présentée à la section 3.1.1 pour donner un niveau

34
supplémentaire d'émergence, est aussi représentée. Mais la plus grande nouveauté
dans cette figure porte sur les cinq modules qui servent d'états internes au système.
Comportements Fusion
Cognition
SituationExterneGlobale
Besoins
Motifs
Sensations Actions
SélectionFinale
ActivationParamètres Internes
ObservationActivation &Exploitation
Figure 3.2 Architecture de SIR
Au niveau de ces états internes, trois sources furent identifiées pour déterminer le
contexte global de sélection de comportements. Une première source est la situation
externe globale, issue des sensations externes de l'environnement et caractérisant
une situation plus générale que celle permettant aux comportements de réagir. Une
seconde source est propre aux besoins intrinsèques du système pour sa survie, son
bon fonctionnement et l'atteinte de ses objectifs. La troisième source est fondée sur
les connaissances innées ou acquises des interactions entre le système et
l'environnement. Ces trois sources formulent des recommandations pour appuyer ou
s'opposer à l'utilisation de comportements. Le module de sélection finale pondère et
unifie ces recommandations pour activer les comportements à utiliser. Le module de
motifs sert à coordonner l'ensemble de ces modules en évaluant les recommandations
35
formulées, les intentions spécifiées ou le fonctionnement des comportements. Un
facteur d'évaluation intéressant ici est l'exploitation de comportements,
caractéristique associée à un comportement qui est activé (ou sélectionné) et qui
réagit à l'environnement en fonction des sensations qui lui sont pertinentes.
L'observation de ce facteur est utile pour déterminer si les intentions de l'agent sont
bien rencontrées. Enfin, les actions des comportements activés et exploités par
réactivité sont fusionnées selon leur niveau d'activation avant d'être acheminées aux
actuateurs. Les motifs, les sources de recommandations avec le mécanisme de fusion,
veilleront à gérer l'exclusivité dans l'exploitation de certains comportements
conflictuels, tout en permettant l'action conjointe de comportements compatibles. Ceci
permet d'obtenir une fonctionnalité émergente de nature holistique plus appropriée
aux circonstances conjointes d'exploitation des comportements. Les cinq modules
propres aux états internes de SIR sont décrits dans les prochaines sous-sections, en
commençant par le module de motifs et suivi des modules de recommandations et de
sélection finale.
3.2.1. Module de motifs
Le module de motifs se trouve au niveau supérieur de l'architecture SIR. Un motif
est défini comme une raison d'ordre intellectuel qui pousse à faire une chose, à agir.
Dans SIR, l'utilisation de motifs permet de coordonner les interactions entre les
modules de SIR afin de produire et reproduire des séquence de comportements dans le
temps sans emmagasiner des descriptions du comportement ou du monde, comme le
souhaite Clancey [47]. De plus, les motifs servent à évaluer de façon introspective la
réactivité des comportements face au monde externe ainsi que les états internes
propres aux modules de recommandations et de sélection. Ceci vient répondre au
principe d'auto-observation invoqué à la sous-section 3.1.1, principe considéré
comme une composante nécessaire à l'intelligence. Cette introspection se réalise par

36
l'observation des interactions, des raisonnements et des conséquences des choix du
système par rapport à sa propre identité.
Selon les approches actuelles, deux types d'introspection semblent en fait être
possibles. Le premier est propre à l'observation associée aux états internes et elle est
qualifiée ici d'introspection interne. Observer ce que le système sait ou ne sait pas,
examiner des variables internes particulières (accumulateur faible), ses intentions
ou ses motivations sont toutes des possibilités pouvant le motiver à agir [132].
L'observation des influences entre les sources de recommandations, les
comportements recommandés ou non recommandés et les connaissances du module de
cognition sont les aspects considérés dans SIR pour ce genre d'introspection. Du
raisonnement introspectif est aussi une notion utilisée dans des approches de
raisonnement par cas [67]. Des méta-connaissances peuvent aussi servir à ce niveau
[160]. Le second type d'introspection observe la dynamique externe des interactions
avec l'environnement. Cette forme d'introspection externe peut servir à créer ses
propres formes de raisonnement, comme le souhaite Brooks et Stein [44] par
l'observation des couples sensations-actions émergent. La relation du corps par
rapport à l'environnement [132] peut aussi servir. Il y a aussi Donnart et Meyer [57]
arrivent à faire de l'introspection anticipative (anticipait des résultats différents que
ceux obtenus) et de l'introspective prédictive (prédiction qu'une règle sera fautive).
D'une autre façon, McFarland et Bösser [134] cherchent un peu à faire la même chose
avec leur fonction d'utilité et de coût pour permettre au système de chercher à
maximiser son utilité, qui dépend des conséquences de comportement. Mais une des
nouveautés importantes de SIR est la capacité du système de s'observer réagir dans
l'environnement par l'exploitation des comportements afin d'évaluer le bon
fonctionnement de ses interactions avec ce dernier. L'observation de l'exploitation de
comportement est une forme de sensation abstraite et fusionnée qui considère le rôle

37
du comportement face aux besoins du système et qui est dérivée des sensations
pertinentes et utiles affectant sa réactivité.
Ces deux types d'introspection peuvent influencer les motifs dans SIR. Les motifs
peuvent aussi être activés de par l'observation d'un phénomène discret, ou par
l'intégration temporelle de ses observations [132]. L'intégration temporelle est un
concept qui est aussi jugé important par Smithers [191, 192] pour mesurer la
dynamique des interactions et contrôler les actions sans amener une plus grande
complexité. Il est aussi possible que les motifs s'inter-influencent entre eux. À leur
tour, les motifs influencent les autres modules afin d'en optimiser les interactions,
comme par exemple la sélection de besoins en spécifiant des conditions particulières
telles que la faim (besoin de recharge) et la détresse (besoin de sécurité), ou encore le
désir d'acquérir ou non des connaissances sur l'environnement.
Toujours selon les approches de contrôle actuelles, deux types de motifs ont été
identifiés, soit la motivation et l'émotion. Une motivation se définit comme un facteur
psychologique conscient ou inconscient qui incite l'individu à agir de telle ou telle
façon. D'un point de vue psychologique, la motivation est une notion difficile à
définir [56]. Les motivations cherchent à expliquer la variation dans le
comportement, car les psychologues assument que les comportements ont des causes
(sont déterminés) et sont prévisibles de différentes façons [25]. Dans [56], une
motivation est associée à des forces ou pulsions persistantes qui favorisent
l'émergence d'un comportement global et qui le dirigent afin qu'il répond aux
besoins ou aux conditions qui ont généré ces forces ou pulsions. C'est un phénomène
intériorisé se rapportant aux facteurs internes et externes, et qui incitent un individu
à adopter une conduite particulière ou tendre vers certains buts. Selon Lagache, la
motivation prise dans son sens général correspond à une modification de l'organisme
qui le met en mouvement jusqu'à réduction de cette modification. [56] Une motivation

38
se définit alors comme une variable d'intervention définie par la relation entre les
conditions qui sont les antécédents du comportement et le comportement en soi [25].
Les caractéristiques de la motivation sont l'effort (force psychologique interne ou
physique fournie par l'individu à la poursuite d'objectifs), la persistance
(persévérance et constance dans la poursuite d'objectifs) et l'orientation des
préférences [25, 56]. En d'autres termes, ça revient à dire que les motivations
viennent spécifier les raisons expliquant pourquoi un organisme, à un temps
particulier, se comporte d'une certain façon [62]. Au niveau des travaux en IA,
McFarland et Bösser [134] croient que les motivations sont responsables des
changements de comportements et dépendent des états physiologiques et perceptuels
du système. De plus, Anderson et Donath [13] soutiennent que la motivation est une
classe de processus internes responsables des changements de comportements. Maes
[120, 122], Parker [148, 149] et Schnepf [177] utilisent aussi des motivations dans leur
approche de contrôle. Avec SIR, une motivation peut affecter la préférence,
persistance ou vigueur du comportement [25] de par son influence sur les autres
modules.
Le second type de motifs possible est l'émotion. Dans [69], Frijda indique que les
principes habituellement véhiculés au niveau des émotions sont qu'elles permettent à
un organisme d'assurer la réalisation de ses buts en examinant la réussite et les
fautes. On donne alors aux émotions une interprétation fonctionnelle. Ces principes
indiquent aussi que les émotions sont au service des motivations ou des buts de
l'organisme. De plus, les émotions peuvent servir à renseigner sur l'état des besoins
[77]. Par exemple, la peur peut être une émotion utile au niveau des besoins de
sécurité de l'agent; la colère et la joie peuvent servir au niveau de la réalisation de ses
objectifs. De plus en plus de chercheurs en contrôle intelligent soulèvent
l'importance des émotions dans la prise de décisions intelligentes. Heidegger [83]
indique qu'on ne peut séparer l'émotion de la tâche intellectuelle. Sloman [189, 24]

39
soutient quand à lui que le besoin d'évoluer dans un monde changeant et
partiellement imprévisible, avec de l'information incomplète, inexacte et à partir de
ressources mentales et physiques limitées, risquent fortement de demander à un
système intelligent d'avoir des émotions. Albus [7, 9] indique qu'on ne peut séparer
l'émotion de la tâche intellectuelle et que les émotions sont souvent dissociées de
l'intelligence à cause de leur irrationalité et l'incapacité de les analyser
mathématiquement. Il les considère comme des composantes critiques de
l'intelligence nécessaires pour l'évaluation de la situation, la sélection de buts, la
mémoire, diriger le comportement et contrôler l'apprentissage, sans quoi toute
créature biologique serait détruite par les autres ou détruite par ses propres actions.
Albus les dérive par le module de jugement de valeurs sous forme symbolique. Pfeifer
[154, 153, 155] propose pour sa part une mise en oeuvre d'un modèle d'émotions à
partir d'un système à base de connaissance raisonnant de façon symbolique, et basé
sur les interruptions. Il y a aussi Ortony et al. [146] qui présentent un modèle
d'émotion pour l'IA afin de les prédire et les expliquer, mais non pour les exploiter au
niveau de la machine (ce à quoi ils ne croient pas). Influencé par Ortony, Bates [22,
21, 117] considère les émotions importantes pour la prise de décision et pour atteindre
l'illusion de la vie, car elles permettent d'indiquer que le système se soucie de ce qui
arrive dans le monde et qu'il possède des désirs. Il les met en oeuvre dans des
comportements pour obtenir une réactivité émotionnelle aux événements. Yabuta et
al. [216] confirment que l'introspection est à la base de l'émotion et de l'intuition,
justifiant à nouveau le rôle de l'introspection dans le module de motifs. Enfin,
McCarthy [132] en parle lui-aussi.
Toutefois, la croyance populaire est que les machines ne peuvent avoir des
émotions et qu'il serait dangereux et voir moralement incorrect de tenter d'en leur
transmettre [9]. Pour éviter d'entrer dans des controverses entourant la notion
d'émotion et de par la difficulté de définir avec précision la motivation ou de bien

40
distinguer son rôle par rapport aux émotions, le terme motif semble plus approprié
pour désigner le rôle du module dans l'architecture SIR.
3.2.2. Module de situation externe globale
L'environnement externe dans lequel se trouve l'agent peut certes affecter le
choix de ses comportements. La source de recommandations qui considère
directement cet aspect est le module de situation externe globale. Ce module examine
les conditions particulières de l'environnement telles qu'obtenues des sensations
pour affecter le choix des comportements de l'agent. Par exemple, des conditions
météorologiques, une topologie particulière de l'environnement ou d'autres
conditions externes peuvent influencer directement les intentions de l'agent à partir
de ce module. Le qualificatif "situation externe globale" est utilisé pour les distinguer
du rôle des sensations environnementales auxquelles les comportements activés
réagissent.
3.2.3. Module de besoins
La seconde source de recommandations est le module de besoins qui vient ajuster le
comportement de l'agent en fonction de ses objectifs propres et de son rôle à jouer
dans l'environnement. En psychologie [56], les besoins sont définis comme des
déficiences psychologiques, physiologiques ou sociales ressenties ponctuellement,
agissent isolément ou en combinaison, et qui incitent l'individu à adopter une attitude
ou un comportement particulier qui motive. L'atteinte de l'objectif associé à cette
motivation devrait réduire considérablement l'inconfort résultant de la déficience
ressentie. De la même façon, l'utilisation de motifs avec SIR est une manière pour
l'agent d'évaluer l'impact de ses réactions et de son environnement sur sa propre
identité afin de réajuster de façon autonome ses comportements pour satisfaire ses
41
besoins fondamentaux. Il doit donc exister un couplage important entre les besoins et
les motifs de l'agent.
En psychologie, Maslow [127] indiqua cinq catégories de besoins. Ces besoins sont,
selon leur importance, de type: physiologique (faim), de sécurité (protection
immédiate et future), d'appartenance sociale (groupe), d'estime de soi (confiance,
indépendance, épanouissement, compétence, savoir), et d'actualisation (réaliser ses
aspirations, se perfectionner, créer). Porter ajouta l'autonomie à cette liste de besoins
[56]. Toujours selon Maslow, la personne cherche à satisfaire ses besoins actifs sans
tenir compte des besoins inférieurs déjà satisfaits ou des besoins supérieurs qui n'ont
pas encore fait leur apparition. Deux principes y sont alors utilisés: le manque (un
besoin ne se fait sentir que lorsqu'il n'est pas satisfait, et un besoin satisfait perd son
caractère motivant) et la progression dans le temps qui détermine l'apparition des
besoins [56].
Ces formes de besoins peuvent être utiles au niveau de la machine. Par exemple,
un robot mobile peut avoir des besoins d'ordre physiologique (assurer la charge de
ses accumulateurs), de sécurité (protection immédiate et future), et d'accomplissement
(réaliser les tâches associées à son rôle). En plus des motifs, les besoins peuvent être
influencés par des sensations particulières qui sont associées à leur satisfaction.
Avec SIR, les besoins servent à spécifier des buts explicites à atteindre, soit par
causalité, par motivation ou par chaîne de buts. Ce module doit gérer les
recommandations comportementales venant de ces sources, leurs priorités et les
conflits potentiels. Le module de besoins cherche donc à donner une plus grande
autonomie à l'agent en lui permettant de gérer lui-même le choix des comportements
assurant la satisfaction de ses besoins.
3.2.4. Module de cognition

42
La troisième source de recommandations est le module de cognition. Le module de
cognition regroupe en fait ce qui peut être qualifiée d'intelligence cognitive ou
propre aux fonctions plus évoluées des organismes. La recommandation de
comportements basée sur des connaissances préalables ou construites à partir de la
mémorisation des interactions de l'agent avec l'environnement externe et avec ses
modules de recommandations constitue le rôle principal de ce module.
Trois étapes sont jugées importantes au niveau du module de cognition. Tout
d'abord, le système doit être en mesure de se former des connaissances sur son
environnement et de ses interactions avec lui. Pour la préservation de l'émergence
au niveau du module de cognition, il est important que le système se forme de façon
autonome une compréhension de l'environnement et de l'impact de ses intentions et
actions sur ce dernier, à partir de ses propres manières de représenter et d'identifier
les choses. L'importance que le système se forme sa propre compréhension de ce qui
se passe dans le monde est maintenue par plusieurs. Une intelligence plus mature
tire ses connaissances directement de son environnement et construit de nouveaux
concepts à partir de ses propres connaissances [89]. Dans la même optique, Clancey
[47] indique qu'un mécanisme qui reconstruit et recoordonne les processus au lieu
d'emmagasiner et retirer des descriptions est plus consistent avec ce qui est connu de
la mémoire et la perception humaine. Les descriptions sont toujours en fonction du
cadre de référence de l'observateur interagissant avec son environnement, incluant
son point de vue qui sont eux aussi le produit d'interactions. Les représentations
doivent être interprétées interactivement, en des cycles de perception et d'action [47].
La connaissance est donc relative au point de vue du connaisseur [126], et on ne peut
dissocier les connaissances des compétences de l'agent gérant ses interactions et
servant à identifier l'environnement. Connaître, c'est faire et faire, c'est connaître
[219]. On évite ainsi la problématique en IA traditionnelle de lier les symboles à la
réalité perçue. Avec SIR, ces connaissances peuvent être tirées des sources de

43
recommandations, de la sélection de comportements ou des motifs induits. Elles
peuvent aussi venir de paramètres internes à des comportements ou de la
fonctionnalité émergente observée (par l'identification de lieux [128] par exemple).
L'apprentissage par mémorisation peut aider à la formation de ces connaissances.
La seconde étape consiste à organiser les connaissances disponibles de l'agent et de
raisonner à partir de celles-ci. Le module de cognition doit en fait être en mesure de
raisonner, généraliser, expliquer, anticiper, planifier ou comprendre à une échelle
de temps plus grande que celle des réactions comportementales, organisant le passé
pour mieux comprendre le futur. Le raisonnement en fonction de ces
représentations internes peut donner lieu à des plans [194]. Mais pour respecter
l'émergence, les plans doivent être perçus comme des aides à la décision et ne doivent
pas être suivis aveuglément [3, 151, 152]. Agre et Chapman [3] donnent des indications
intéressantes sur les plans pour aider la prise de décision. Au lieu de construire des
plans composés de primitives qui provoquent toujours la même action peu importe le
contexte, ils considèrent les plans comme des constructions sociales qui peuvent créer
des improvisations créatives, guidée par l'activité et non par la solution de problème
(comme il est réalisée par la modélisation complète et centralisée de
l'environnement). Les agents sont des participants dans le monde, et ne contrôle pas
entièrement ce monde, et c'est dans ce sens qu'il faut planifier. Ils croient que lors de
l'utilisation d'un plan, les environs servent de ressources pour interpréter ce plan.
Le plan dépend aussi de l'expérience et des compétences de l'agent. En utilisant des
comportements à la base de son architecture de contrôle, SIR permet d'établir une
telle dépendance. Un autre aspect pouvant influencer les plans est la communication
entre les systèmes. Cette communication peut servir à transmettre des buts ou des
intentions [129, 171], ou pour des expériences avec des groupes de robots [130, 149].
Cette communication est possible si les systèmes en question possède une

44
représentation interne commune des connaissances qui peut être innée ou acquise
[44, 78].
La troisième étape au niveau du module de cognition est son influence sur les
comportements du système. Avec SIR, le contrôle des actuateurs est réalisé
exclusivement par les comportements. Toutefois, ceci ne signifie pas que la cognition
ne peut affecter indirectement les actions du système. Cette influence se manifeste
par la formulation de recommandations cognitives ou par la modification de
paramètres internes à des comportements. Cette dernière influence permet d'utiliser
des comportements plus généraux dont la réactivité peut être ajustée en fonction des
objectifs dérivés par les connaissances, et rejoint le quatrième niveau d'émergence
spécifié à la section 3.1. À ce niveau, il ne faut pas perdre de vue le danger de trop
vouloir raisonner de façon cognitive. Il faut plutôt tenter de réaliser un compromis
entre ce qui doit faire partie de l'aspect réactif du système et ce qui demande un
raisonnement évolué afin de ne pas tendre vers une problématique similaire à celle
de l'IA traditionnelle. Ceci fait partie du compromis entre la puissance et la
généralité [102].
3.2.5. Module de sélection finale
Ce dernier module sert à combiner les recommandations des sources de
recommandations pour déterminer les comportements à utiliser. Cette combinaison
peut s'effectuer simplement par l'emploi d'un mécanisme de décision entre les
sources de recommandations. Mais pour pouvoir dériver les intentions d'une manière
plus complexe, le module de sélection finale peut utiliser des règles de conduite ou des
valeurs affectant l'importance relative des différentes sources de recommandations.
Par exemple, dans certaines situations, il peut être bénéfique de favoriser d'une façon
générale les recommandations cognitives face aux besoins. De la même façon au
niveau humain, ce ne sont pas tous les individus qui réagissent de la même façon:
45
certains sont plus émotifs, plus rationnels, plus intuitifs ou plus égoïstes que d'autres.
Ceci justifie l'influence des motifs et la possibilité d'utiliser des concepts comme les
valeurs au niveau du module de sélection finale.

46
4. ENVIRONNEMENT D'EXPÉRIMENTATION BUGWORLD UTILISÉ POUR LA CONCEPTION ET
LA VALIDATION DE SIR
Pour pouvoir valider le fonctionnement de SIR, il est nécessaire d'utiliser
l'architecture pour le contrôle de système tentant de satisfaire des objectifs
dynamiques et variés dans des environnements complexes, inconnus, et partiellement
perceptibles. L'utilisation de robot mobile se prête bien à ce genre de problématique.
Une seconde contrainte pour la validation de SIR est d'avoir accès à ses différentes
variables internes afin de vérifier le bon fonctionnement des mécanismes, de les
ajuster au besoin et d'avoir une trace accessible de ses décisions pour pouvoir
expliquer et bien analyser le comportement résultant.
Au moment d'aborder la réalisation de SIR, il était impossible d'évaluer les
capacités de traitement requises pour sa mise en oeuvre dans un robot mobile, les
mécanismes des modules de SIR n'ayant pas été conçus. De plus, une telle plate-forme
de développement n'était point disponible pour les expérimentations. En soi, la
construction d'un robot mobile divergeait des objectifs de la thèse qui est orientée
davantage sur proposition, la validation et l'analyse d'une nouvelle architecture de
contrôle. Pour mieux se soucier des contraintes de fonctionnement internes de cette
architecture, il fut décidé d'utiliser un environnement de simulation de robot mobile
qui respecte, sous une certaine mesure, les contraintes d'une mise en oeuvre
pratique. La simulation sert en fait d'étape intermédiaire importante avant de passer
à la réalisation pratique [174]. L'environnement de simulation est de deux dimensions
et considère des capacités sensorielles et d'actions similaires à ce qui seraient
possibles d'accomplir avec un robot mobile. Il existe plusieurs approches qui furent
validées de cette façon [60, 64]. Mais pour ne pas attiser le débat entre l'utilité des
simulations [174] par rapport à une mise en oeuvre réelle [199] pour la validation
d'architecture de contrôle intelligent, il est bon d'indiquer que les résultats présentés
47
dans cette thèse ne constituent qu'un pas vers la réalité et ne viennent pas confirmer
la validité des mécanismes proposés dans le monde réel où on doit faire face à des
capteurs bruitées, des contraintes en temps de calcul, de capacité de mémoire, des
actions imparfaites, etc. Certaines conditions furent quand même considérées pour
reproduire des limitations d'une mise en oeuvre pratique, comme restreindre la
complexité des mécanismes internes (et la longueur du code), éviter toute dépendance
des mécanismes à une perception et des actions parfaites, et considérer des capacités
perceptuelles et motrices réalistes (comme une dépendance entre la vitesse et la
capacité de rotation de l'agent, et ne pas avoir une lecture d'orientation absolue par
rapport à l'environnement). Ces restrictions ne sont pas reproduites sous forme de
modélisation de capteurs physiques ou par l'ajout de bruit. Elles sont plutôt
considérées lors de la conception des mécanismes de SIR, le choix de ses actions, et par
les conditions de l'environnement. Malgré cela, une réalisation en pratique
demandera sûrement la modification des comportements ou des mécanismes internes
aux modules de SIR. Toutefois, la même remarque s'applique si un environnement
virtuel [206] était utilisé. Il reste qu'il est possible de démontrer le principe
d'utilisation de SIR avec l'environnement simulé de robot mobile, et c'est dans cette
optique que SIR est validée. Sa mise en oeuvre pratique restera donc un point de
validation future.
Le logiciel de simulation de robot mobile utilisé se nomme BugWorld et fut conçu
par Nikolaus Almàssy en Suisse [11]. BugWorld permet de simuler la trajectoire d'un
agent capable de percevoir son environnement à partir de capteurs analogiques de
proximité et de détecteurs de cibles. La section 4.1 donne une description de
l'environnement de simulation, suivie de la description des expérimentations
réalisées à la section 4.2. Ensuite, la section 4.3 décrit l'architecture logicielle utilisée
pour la mise en oeuvre de SIR et sa validation avec BugWorld.

48
4.1. Description de l'environnement de simulation de robot mobi le
BugWorld
BugWorld [11] est un logiciel travaillant sur Unix et permettant la simulation de
plusieurs agents autonomes, soit des robots simulés équipés de senseurs de distances.
Chaque "insecte" possède son propre ensemble de senseurs localisés sur les contours
de son corps. Le simulateur est composé de plusieurs processus séparés qui
communiquent via Internet. De cette façon, plusieurs agents peuvent être simulés
simultanément sur différentes stations de travail. Le processus qui maintient toutes
les informations concernant le "monde" simulé peut aussi travailler sur une station
séparée, et ainsi il n'est pas ralenti par les agents qui peuvent demander de plus en
plus de temps de traitement en fonction de la complexité de leur architecture de
contrôle.
La figure 4.1 illustre la configuration de l'environnement venant avec BugWorld.
Un agent dans BugWorld est de forme circulaire avec un petit cercle localisant son
"nez". La trajectoire qu'il suit peut être affichée en laissant une trace de sa position à
chaque cycle d'exécution. Toutes les lignes, boîtes et les polygones sont perçus comme
étant des obstacles, tandis que les cercles représentent des cibles. Les cibles ne sont
pas cachées par les obstacles. La configuration des obstacles peut être modifiée au
besoin avec le logiciel xfig, un utilitaire de dessin sur Unix. L'environnement de
base de BugWorld fut utilisé lors de la conception de SIR afin de ne pas que soit biaisée
l'organisation des obstacles par le concepteur des mécanismes de SIR (soit l'auteur de
cette thèse). Seule la cible du coin inférieur gauche fut ajoutée à cet environnement
(pour servir de point de charge lors des expérimentations). D'autres tests avec des
configurations différentes d'obstacles ont toutefois été réalisés et sont présentés dans
la thèse.

49
Cible
Obstacle
AGENT
Nez
Figure 4.1 Environnement de base avec BugWorld
Avec BugWorld, le nombre et la position des capteurs de proximité sont
paramétrisables. Le déplacement de l'agent s'effectue en évaluant une nouvelle
position en terme de coordonnées (x, y, q) et en transmettant cette position pour
affichage sur l'environnement. Ceci ne signifie pas que l'algorithme de contrôle
utilise ces coordonnées pour effectuer le contrôle. Il n'y a cependant pas de
mécanisme de collisions de pré-défini et c'est au concepteur de gérer ces situations en
fonction des sensations venant des capteurs utilisés. Enfin, il est possible de modifier
la couleur de l'agent en cours de fonctionnement, et de déplacer dynamiquement des
obstacles dans l'environnement.
4.2. Description des expérimentations réalisées et de la mise en oeuvre
des mécanismes
La problématique considérée lors des expérimentations est la suivante: un agent
placé dans une pièce doit atteindre des cibles tout en assurant un bon niveau de

50
charge de son accumulateur d'énergie et une recherche efficace de son
environnement. Un seul point de charge est présent dans la pièce. L'agent ne
possède aucune information a priori de son environnement, et ne possède qu'une
quantité limitée de mémoire pour en tirer des connaissances.
Comme capacités sensorielles, l'agent a à sa disposition huit capteurs analogiques
de proximité localisés respectivement à 45° d'intervalle en partant de son nez, deux
capteurs analogiques de détection de cible et deux capteurs analogiques de détection
de point de charge situés à chacun de ses côtés. Les capteurs de détection de point de
charge sont en fait des capteurs de détection de cible pour une cible particulière qui
est alors considérée dans l'environnement comme un point d'énergie pour l'agent.
Les capteurs de proximité ont une limite de perception fixée à 500 points, tandis que
ceux pour les cibles et les points de charge ont une portée de 200 points. Comme
référence pour évaluer ces portées, l'agent a un rayon de 20 points. Pour gérer les
conflits, la cible la plus proche est détectée par les capteurs lorsque plusieurs cibles
se trouvent dans leur rayon de portée. La figure 4.2 illustre la position et le nom de
ces capteurs.
Capteur avant droit
Capteur droitDétecteur droit de cibleDétecteur droit point de charge
Capteur arrière droit
Capteur arrière
NEZCapteur avant
Capteur avant gauche
Capteur gaucheDétecteur gauche de cible
Détecteur gauche de point de charge
Capteur arrière gauche
Figure 4.2 Capacités sensorielles d'un agent pour les expérimentations
Les autres informations disponibles sont la vitesse, la rotation réalisée et le niveau
de charge de son accumulateur d'énergie. Il est à noter que la rotation n'est utilisée

51
que pour indiquer si l'agent est immobile ou non, et elle ne sert pas à la construction
d'une représentation interne de l'environnement par l'agent. Mais les
expérimentations tentent de valider comment, en fonction d'une capacité sensorielle
limitée et fixe, l'agent peut se comporter de façon "intelligente" dans son
environnement.
Comme actions possibles, la vitesse et la rotation de l'agent sont les deux variables
de commandes qui affectent sa trajectoire. Sa couleur est aussi modifiée pour
communiquer certains états de l'agent en cours de fonctionnement. Le bleu est utilisé
lors de son fonctionnement normal, le rouge pour indiquer que l'agent tente de
communiquer quelque chose, et le noir représente l'absence d'énergie ou sa mort.
4.2.1. Fonctions spéciales considérées lors des expérimentations
Quatre fonctions spéciales nécessaires pour les expérimentations réalisées avec
BugWorld affectent le comportement de l'agent. Ces fonctions sont:
- Mécanisme de gestion des collisions. Une restriction de BugWorld est que la
collision de l'agent avec un obstacle dans l'environnement doit être géré à même
les capteurs de sensations utilisés pour le contrôle. Un mécanisme d'analyse des
sensations par rapport au déplacement désiré de l'agent (selon les commandes
fournies par SIR et la position de l'agent) vérifie si une collision survient en
évaluant si le déplacement respectif dans la direction de chacun des capteurs est
supérieur à la lecture de proximité obtenue. Si c'est la cas, l'agent est placé le
plus prêt possible de l'obstacle, suivant l'orientation du déplacement spécifié et
la perception de l'obstacle. Pour une bonne gestion des collisions, les obstacles
de très petites dimensions par rapport à la dimension de l'agent ne doivent pas
être présents dans l'environnement;
- Mécanisme d'inhibition de cibles. Pour produire des changements dans
l'environnement, les cibles sont inhibées pendant 200 cycles une fois qu'elles
52
sont atteintes par l'agent. L'atteinte d'une cible est acceptée lorsque la somme
des lectures données par les détecteurs de cible est inférieure au rayon de
l'agent;
- Mécanisme de simulation d'un accumulateur d'énergie et d'un point de charge.
L'énergie de l'agent décroît linéairement à chaque cycle et doit être positive
pour lui permettre de se déplacer. À moins d'une indication contraire,
l'autonomie de l'agent est de 250 cycles. L'énergie augmente de 2% par cycle
lorsque l'agent se trouve au point de charge qui correspond à une cible choisie
pour jouer le rôle du point de charge. Le point de charge est atteint lorsque la
somme des lectures données par les détecteurs de point de charge est inférieure
au rayon de l'agent;
- Mécanisme de déplacement d'un obstacle. Pour certaines expérimentations, un
objet mobile est utilisé. Cet objet mobile se déplace selon une trajectoire
préétablie à un rythme donné. Le rythme spécifié pour les expérimentations
concernées est de déplacer l'obstacle de cinq points à tous les cinq cycles
d'exécution.
4.3. Validation de SIR avec BugWor ld
SIR tente d'exploiter au maximum les dépendances entre l'environnement, les
capacités perceptuelles et motrices de l'agent, ses capacités de traitement et ses
capacités de décision pour en faire émerger un comportement intelligent. Les points
à valider sont:
- l'utilisation de comportements pour le contrôle de l'agent et la fusion dynamique
d'actions au niveau comportemental;
- la sélection dynamique de comportements par la situation externe globale;
- la sélection dynamique de comportements par les besoins;

53
- la sélection dynamique de comportements par la cognition;
- l'utilisation de motifs pour affecter la sélection de comportements.
Pour pouvoir valider efficacement ces points, il est important de commencer par la
mise en oeuvre du module comportemental car c'est sur lui que repose la dynamique
d'interactions entre l'agent et son environnement. En général, la mise en oeuvre
incrémentale des modules de SIR permet de mieux cerner les influences de chacun
sur les comportements globaux qui en émergent. De plus, ceci permet de progresser
vers des dimensions plus évoluées de l'intelligence.
La problématique choisie pour valider SIR permet de considérer la majorité des
concepts possibles avec cette architecture de contrôle telle que représentée à la
figure 3.2. Avant de présenter les mécanismes utilisés pour sa mise en oeuvre, il est
important de noter que trois influences associées aux motifs n'ont pas été validées car
elles se sont avérées inutiles pour les expérimentations. Ces influences sont le lien
entre le module de motifs et le module de situation externe globale, l'influence du
module de besoins sur les motifs et le lien entre les motifs et le module de sélection
finale. Il fut préférée d'utiliser des mécanismes plus simples pour la mise en oeuvre
des modules que de complexifier inutilement le processus de décision. La section
10.4.2 illustre en quoi il serait possible d'exploiter de telles influences avec d'autres
mécanismes de mise en oeuvre des modules.
4.3.1. Principes utilisés pour la mise en oeuvre de SIR avec BugWorld
Pour guider la conception des modules de SIR dans le cadre des expérimentations
considérées, un scénario fut élaboré venant spécifier globalement le comportement
souhaité de l'agent pour la réalisation de ses objectifs. Le scénario consiste
initialement à permettre à l'agent d'explorer son environnement en suivant les
contours, tout en permettant la recherche de cibles et la charge de l'accumulateur.
54
L'agent peut explorer d'autres endroits de son environnement au fur et à mesure qu'il
arrive à identifier les endroits déjà visités. Il peut aussi se servir des connaissances
acquises pour se diriger vers un point de charge au besoin. À un certain point,
l'agent peut juger que ses connaissances sont suffisantes pour pouvoir les exploiter
dans son objectif principal d'atteindre les cibles qu'il a pu détecter. Après avoir
exploité ces connaissances, avec ou sans succès, l'agent peut reprendre l'exploration
et raffiner davantage ses connaissances.
Les outils de l'IA peuvent être exploités à différents niveaux dans SIR. Pour sa
validation avec BugWorld, la ligne directrice dans le choix de ces outils fut de tenter
d'exploiter ceux qui arrivaient à respecter les principes de base de SIR et les besoins
associés à la problématique. Pour la mise en oeuvre des modules de SIR, trois
techniques sont utilisées. Tout d'abord, la logique floue s'est avérée un outil efficace
pour mettre en oeuvre les comportements, la fusion de leurs actions, les
recommandations de comportements ainsi que leur sélection finale. Ses niveaux
symboliques et numériques ainsi que l'activation parallèle des règles sont des atouts
importants pour faire le pont entre la vision traditionnelle (ou délibérée) et la vision
nouvelle (ou réactive) de l'IA. Pour mieux comprendre le fonctionnement des
recommandations, il est bon de mentionner maintenant que les modules de
recommandations indiquent la désirabilité et l'indésirabilité des comportement sous
forme floue. La justification de ce mécanisme est présentée à la section 8.3. Ensuite,
au niveau cognitif, un graphe topologique est utilisé pour la construction d'une
représentation interne du monde. L'hypothèse de départ est que l'agent n'a aucune
information sur son orientation dans l'environnement ou la disposition et le nombre
d'obstacles, de cibles et de points de charge dans l'environnement. Il doit donc se
construire lui-même et à partir de ses sens une représentation de l'environnement où
il évolue en exploitant correctement l'espace-mémoire qui lui est disponible. Enfin,
un mécanisme d'activation et d'influences est utilisé pour les motifs. Les chapitres 5 à

55
8 décrivent la mise en oeuvre de chacun des modules de SIR pour les expérimentations
avec BugWorld.
4.3.2. Diagramme d'architecture logicielle pour les expérimentations
Au cours des expérimentations, étant donné que la logique floue est utilisée pour
une grande partie de la mise en oeuvre de SIR, il était envisageable de devoir ajuster
les compétences de l'agent ainsi que les sources de recommandations pour qu'il
réagisse adéquatement à l'environnement dans le but de réaliser ses objectifs. De
plus, il était nécessaire d'accéder à différentes informations. Pour faire face à ces
exigences et assurer une bonne flexibilité du logiciel, des fichiers d'entrées et de
sorties sont utilisés. Les fichiers d'entrées permettent de spécifier les fonctions
d'appartenance, les règles comportementales et les règles de recommandations
utilisées par les mécanismes flous de SIR. Le fichier d'expressions régulières
topologiques est utilisé au niveau du module de cognition (voir section 7.3.2). Comme
sortie, il est possible de consulter une trace des états décisionnels, de l'exploitation et
l'activation de comportements à chaque cycle d'exécution, de la désirabilité et
l'indésirabilité des comportements, des lieux topologiques perçus, des informations
propres au graphe topologique construit ainsi que des niveaux d'activation des motifs.
La figure 4.3 illustre l'ensemble de ces fichiers et de leur influence sur le logiciel de
simulation. D'autres informations sont acheminées directement à la console en cours
de simulation, pour un meilleur suivi du déroulement.

56
Fonctions d'appartenance Comportements Recommandations
Environnement de BugWorld
Trace Exloitation et Activation de
comportement
Lieuxtopo.
perçues
MotifsDésirabilité et Indésirabilité de comportement
SIR ActionsSensations
Expressions topologiques
CONFIGURATION
Graphe Topologique
(Noeuds et Liens)
ÉTATS INTERNES
Figure 4.3 Diagramme d'architecture logicielle
Une simulation démarre en spécifiant sur une ligne de commandes la position (x, y,
q) de l'agent, ainsi que la durée de la simulation en nombre de cycles d'exécution. Un
cycle d'exécution est composé des opérations séquentielles suivantes:
- Sensations venant des capteurs;
- Module de motifs;
- Fuzzification;
- Module de situation externe globale;
- Module de cognition;
- Module de besoins;
- Module de sélection finale;
- Exécution des comportements activés;
- Fusion d'actions par défuzzification;
- Fonctions spéciales de la section 4.2.1;

57
- Mise à jour de la position de l'agent dans l'environnement.
58
5. CARACTÉRISTIQUES DU MODULE DE COMPORTEMENTS FLOUS CONÇU
Le rôle des comportements (ou des compétences) est de dériver les actions de
contrôle de l'agent de façon à ce qu'il réagisse efficacement aux situations
environnementales selon son choix intentionnel de comportements. Toute technique
réalisant une correspondance entre un domaine d'entrée et un domaine de sortie peut
être considérée pour la mise en oeuvre de comportement. L'approche floue fut
retenue ici pour la mise en oeuvre du module de comportements est qu'elle permet
d'utiliser des règles et des concepts linguistiques pour la conception de
comportements, tout en permettant une fusion efficace au niveau des actions. De
plus, un mécanisme d'inférence floue permet d'inclure au besoin des comportements
binaires seulement en modifiant la forme des fonctions d'appartenance. De plus, le
lien entre l'aspect qualitatif du contrôle et la caractérisation quantitative des
variables permet d'établir plus facilement l'interface entre le module de cognition et
les comportements via les paramètres internes. Enfin, il existe des méthodes pour
réaliser l'apprentissage (par renforcement [31, 32, 116] ou rétropropagation [94]) et la
modification dynamique de processus flous [33]. La logique floue est utilisée comme
constituante de base de comportements par Saffiotti et al. [170, 171] pour leur robot
Flakey, Li [115], Salich et Puente [174], et Pin et al. [159].
Pour les expérimentations, deux types de comportements sont utilisés: des
comportements flous sont employés pour le contrôle des actuateurs; et un
comportement utilisant des entrées flous mais exploitant un mécanisme d'inférence
binaire sert à l'identification de formes acheminées au module de cognition. Le
mécanisme d'inférence pour les comportements est présenté dans ce chapitre,
accompagné des comportements flous utilisés pour les expérimentations avec
BugWorld. Le comportement d'identification est présenté au chapitre 7 pour faciliter
la compréhension du module de cognition.

59
5.1. Utilisation de comportements flous
La logique floue constitue un moyen efficace pour représenter la nature inexacte
et approximée du monde [112]. Elle s'avère utile lorsque les processus sont trop
complexes pour être analysés par des techniques quantitatives conventionnelles, ou
lorsque les sources d'informations disponibles sont interprétées qualitativement, avec
incertitude ou imprécision [112]. La formulation des connaissances sous forme de
règles et l'utilisation de variables linguistiques floues pour représenter les situations
permettent de construire un modèle flou représentatif et compréhensible pour
l'humain. Le recouvrement de ces variables linguistiques permet de représenter
l'ambiguïté dans les décisions, concept très présent dans le raisonnement humain, et
donne une capacité d'interpolation [37, 217]et de généralisation pour fournir une
réponse continue et graduelle en fonction des règles de contrôle.
La logique floue peut être perçue comme une extension de la théorie classique des
ensembles. Elle permet de raisonner selon des niveaux de vérité au lieu d'utiliser un
raisonnement avec vérité absolue. On y quantifie des valeurs numériques selon
différents ensembles flous pour ensuite exploiter cette représentation linguistique
dans des règles et en inférer des décisions. Les étapes suivies par un système flou
[112] sont illustrées à la figure 5.1. Les sensations perçues par l'agent sont données
en entrée aux différents comportements. La première étape consiste à fuzzifier ces
entrées, soit à transformer une entrée en des variables linguistiques similaires à des
sous-ensembles flous. Une variable linguistique est définie dans la base de
connaissances par une étiquette et une fonction d'appartenance. La fuzzification
permet alors d'établir le degré d'appartenance des entrées pour différentes variables
linguistiques qui peuvent les caractériser. Ensuite, ces variables linguistiques sont
utilisées par les règles pour inférer des décisions. Les règles linguistiques décrivent
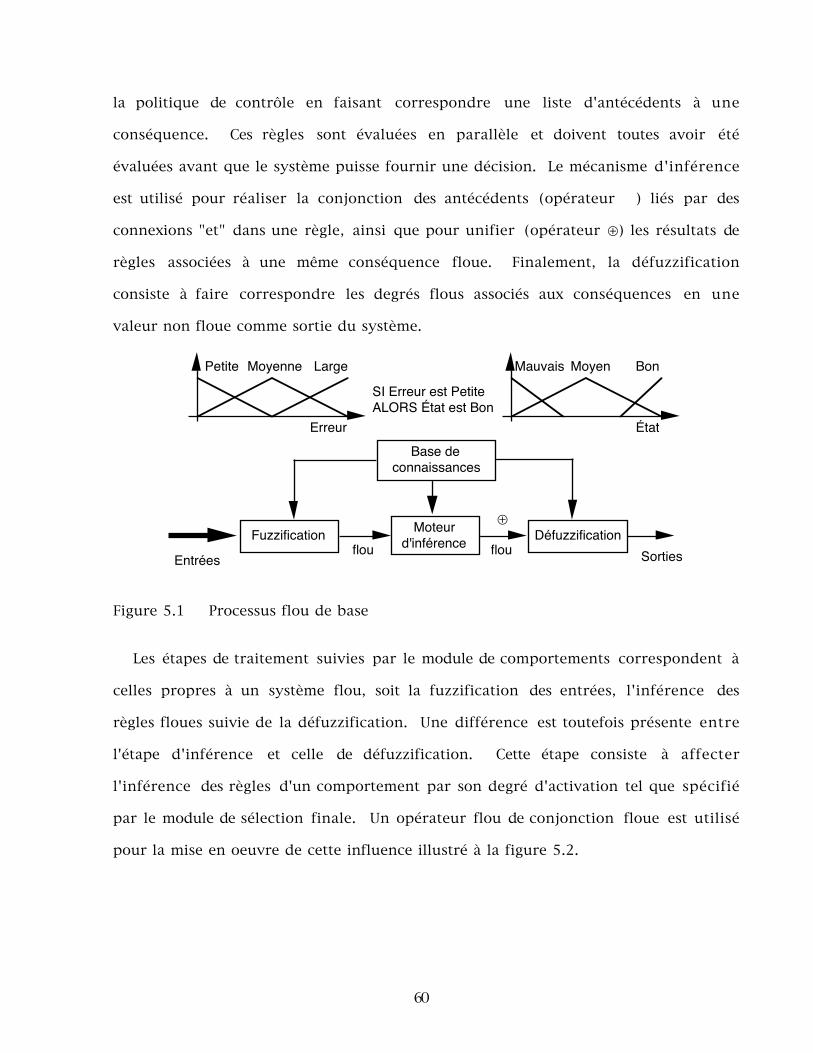
60
la politique de contrôle en faisant correspondre une liste d'antécédents à une
conséquence. Ces règles sont évaluées en parallèle et doivent toutes avoir été
évaluées avant que le système puisse fournir une décision. Le mécanisme d'inférence
est utilisé pour réaliser la conjonction des antécédents (opérateur ƒ) liés par des
connexions "et" dans une règle, ainsi que pour unifier (opérateur ⊕) les résultats de
règles associées à une même conséquence floue. Finalement, la défuzzification
consiste à faire correspondre les degrés flous associés aux conséquences en une
valeur non floue comme sortie du système.
Base deconnaissances
DéfuzzificationMoteurd'inférenceFuzzification
Entrées Sortiesflou flou
ƒ ⊕
Petite Moyenne Large
Erreur
SI Erreur est PetiteALORS État est Bon
Mauvais Moyen Bon
État
Figure 5.1 Processus flou de base
Les étapes de traitement suivies par le module de comportements correspondent à
celles propres à un système flou, soit la fuzzification des entrées, l'inférence des
règles floues suivie de la défuzzification. Une différence est toutefois présente entre
l'étape d'inférence et celle de défuzzification. Cette étape consiste à affecter
l'inférence des règles d'un comportement par son degré d'activation tel que spécifié
par le module de sélection finale. Un opérateur flou de conjonction floue est utilisé
pour la mise en oeuvre de cette influence illustré à la figure 5.2.

61
Règles du comportement
Activation du comportement
ƒINFÉRENCE
flouflou
Figure 5.2 Inférence réalisée par le module de comportements flous
D'une façon plus détaillée, les étapes du traitement réalisé par le module de
comportements flous sont:
1) Fuzzification selon la relation (5.1), qui consiste à quantifier les sensations en
degrés d'appartenance propres aux variables linguistiques (dénotées par Ai) les
caractérisant pour réaliser le traitement flou.
Sensations Æ mAiSensation( ) (5.1)
Les formes permises pour les fonctions d'appartenance définissant les variables
linguistiques sont présentées à la figure 5.3. Elles sont définies par quatre
paramètres comme le sont les fonctions d'appartenance standards du logiciel
FuzzyTech [90].
1,2 3
4 1
2 3
4 1
2,3
4
3,42
1Type Z Type P Type l Type S
Figure 5.3 Formes admissibles pour les fonctions d'appartenance
2) Inférence des règles r du comportement j, relation (5.2). L'opérateur ƒ fait
référence à une conjonction floue des n antécédents propres à la règle r. L'opération

62
résulte en l'obtention de degrés d'appartenance pour les variables linguistiques
associées aux actuateurs (dénotées par B ou C). Le résultat est aussi qualifié
d'activation de la règle r du comportement j. Le minimum est utilisé comme opérateur
de conjonction floue. Cette opération est répétée pour toutes les règles des
comportements, et pour tous les comportements utilisés.
mBrjAction( ) = ƒ m An
Sensation( )[ ] (5.2)
3) Affectation par le degré d'activation du comportement, relation (5.3). Lors de
cette opération, le degré d'activation du comportement vient affecter l'activation de
ses règles en utilisant le minimum pour réaliser la de conjonction floue.
mCrjAction( ) = ƒ mBrj
Action( ),mact j( )[ ] (5.3)
4) Union des conséquences selon la relation (5.4). Cette étape utilise une
opération de disjonction floue ⊕ par maximum pour unifier les degrés d'activation
d'une même variable linguistique de conséquence.
mCoAction( ) = ⊕ mCjr
Action( )[ ] (5.4)
5) Défuzzification de type centroïde selon la relation (5.5). Elle est utilisée pour
fusionner les actions floues recommandées par les comportements afin d'en obtenir
les commandes à exécuter. Le paramètre x représente les variables linguistiques
propres à une variable de contrôle ou d'action. La variable w représente le point
central de la variable linguistique Co [210]. Elle se calcule ici en faisant la moyenne
des approximation ayant un degré mCo(x) tel que définit par la fonction
d'appartenance de Co. Ainsi, pour des fonctions d'appartenance symétriques de type P
ou l, w correspond à sa valeur centrale. Le recouvrement des fonctions
d'appartenance pour les variables linguistiques de conséquence n'influence pas alors
les commandes de contrôle. Une influence est observée si des fonctions

63
d'appartenance dissymétriques sont utilisées, ou que l'aire des fonctions
d'appartenance est évaluée lors de la défuzzification.
Action(x) =
mCox( ) ⋅wCo
xÂ
mCox( )
xÂ
(5.5)
Enfin, il est possible d'utiliser d'autres opérateurs flous pour la conjonction ou la
disjonction [112]. Par exemple, des expériences ont été réalisées pour comparer
l'emploi du produit comme opérateur de conjonction flou. Au niveau des
comportements, aucune différence significative dans les performances ne fut notée.
Pour l'influence de l'activation du comportement toutefois, il fut préféré d'utiliser le
minimum pour assurer une plus grande prévisibilité des actions d'un comportement
activé. L'utilisation du produit déforme davantage les actions, mais n'amène pas
encore de grandes divergences de comportement. Le minimum fut donc utilisé
comme opérateur de conjonction au niveau du module de comportements.
5.2. Description des comportements flous utilisés
Lorsqu'un grand nombre de comportements sont disponibles pour contrôler un
agent, il semble qu'une distinction au niveau de leur type est utile afin de bien situer
leur rôle. Certains distinguent les comportements sous forme de réflexes
(caractérisés par une relation spatiale fixe entre les stimulis et les muscles
particuliers et où l'intensité de la stimulation gouverne la réponse), de formes
d'actions fixe ou des comportements orientés-but, et de comportement d'orientation et
de représentation du monde pour le raisonnement à partir de sensations réelles et
non abstraites [26, 27, 177]. Un regroupement similaire est formulé par Kiss qui
considère des comportements de type réflexe, talent complexe et action délibérée
[102]. Bellingham et Consi [29] regroupent pour leur part les comportements en

64
comportement de survie et en comportement orienté-but, tandis que Saffiotti et al.
[170] distinguent les comportements réactifs avec buts innés de ceux dont l'objectif est
donné par un planificateur.
Pour les expérimentations réalisées, la distinction comportementale jugée la plus
propice se réalise en deux niveaux, soit selon leur rôle et selon leur règles. Au niveau
de leur rôle, la distinction choisie est celle de McFarland et Bösser [134] qui
considèrent trois types de comportements: des comportements orientés vers la
satisfaction d'un but (goal-oriented, le but est reconnu une fois atteint, mais le
processus pour l'atteindre dépend des circonstances environnementales); des
comportements cherchant à réaliser un but non spécifiquement identifié (goal-
seeking); et des comportements dirigés vers un but explicitement représenté (goal-
directed). Au niveau des règles, il est possible de distinguer des comportements
purement réactifs, des comportements avec condition bivalente d'où émerge un
compromis par l'établissement d'un équilibre, et des comportements avec condition de
neutralité pour adoucir les commandes. Ces deux façons de distinguer les
comportements sont mieux compris avec l'aide des prochaines descriptions des
comportements utilisés pour les expérimentations. Pour y simplifier la présentation
des règles, les règles symétriques sont représentées sous forme d'une seule règle où
l'état x réfère à un côté (droite ou gauche) et l'état y réfère à l'état inverse (c'est-à-
dire si x est droite, alors y est gauche). De plus, les règles avec une * sont des règles
où les antécédents ou les conséquences en italiques sont modifiables par le module de
cognition via les paramètres internes. Les paramètres possibles correspondent tout
simplement à la condition bivalente, soit remplacer gauche par droite ou droite par
gauche. Enfin, un signe positif pour la rotation doit être considérée si elle se fait vers
la droite, et négatif si elle est réalisée vers la gauche. Les variables de contrôle
disponibles pour les comportements sont l'accélération et le recule pour affecter la
commande de vitesse, la rotation et la couleur.

65
5.2.1. Comportement URGENCE
Le rôle du comportement d'URGENCE est de réagir aux conditions critiques de
collision à l'avant ou en angle. Les capteurs utilisés sont le capteur de vitesse, le
capteur avant et les deux capteurs avant en angle de 45°. La figure 5.4 illustre les
règles et les fonctions d'appartenance pour ce comportement. La politique de
contrôle consiste à ralentir face à un danger à l'avant (première règle) et de
s'éloigner des dangers en angle (deuxième règle). Si un danger se trouve à chaque
côté de l'agent, cette deuxième règle tente d'établir un équilibre pour la position de
l'agent face à ces obstacles. Si l'agent se trouve pris dans un cul-de-sac, la troisième
règle lui permet de tourner drastiquement pour changer son orientation (la gauche
est la direction par défaut dans ce cas). Les fonctions d'appartenance pour les
capteurs de proximité définissent des zones très proches de l'agent, et les
conséquences des règles provoquent de fortes rotations de l'agent étant donné
l'urgence de la situation dans laquelle il se trouve si de telles règles réagissent.

66
!!<Cul-de-sac> !!SI !Immobile-vitesse!!ET!Danger-avant !!ET!Danger-avant-droite !!ET!Danger-avant-gauche !!ALORS!Tourne-gauche-raide!!<Danger-x> !!SI !Danger-avant-x !!!ET!NON (Danger-avant-y)!!ALORS!Tourne-y
!<Danger-avant>!!SI !Danger-avant!!ET!NON (Immobile-vitesse) !!ALORS !Ralentir-beaucoup
Danger-avant
Capteur avant
00 10 20 30 40 50 60
0.5
1m
Danger-avant-x
Capteur avant x
00 10 20 30 40 50 60
0.5
1m
Immobile-vitesse
Vitesse
00 2 4 6 8 10
0.5
1m
Accélération
Ralentir-beaucoup
-4 -3 -1 1 3 42-2
00 30 60 90 120 150 180
Tourne-x Tourne-x-raide
Rotation
0.5
1m
00
m
0.5
1
Figure 5.4 Règles et fonctions d'appartenance pour le comportement URGENCE
Ce comportement cherche à satisfaire un but qui n'est pas spécifiquement
identifié, soit l'éloignement des surfaces pour éviter les collisions. Il est aussi très
réactif car les règles fournissent une commande dès qu'un des capteurs de proximité
considérés indique la présence d'un danger.
5.2.2. Comportement ÉVITER
Ce comportement permet d'éloigner l'agent des obstacles à proximité. La détection
des obstacles se fait avec les mêmes capteurs que pour le comportement d'URGENCE,
67
soit le capteur avant et les deux capteurs avant en angle de 45°. La vitesse est aussi
considérée. La figure 5.5 illustre les règles et les fonctions d'appartenance pour le
comportement ÉVITER. Les règles permettent à l'agent de ralentir à l'approche d'un
obstacle et à l'embouchure d'un corridor, s'éloigner des obstacles en angle et de
changer d'orientation en cas d'impasse à l'avant. La gauche est la direction par
défaut dans ce cas-ci. De plus, la troisième règle tente d'établir un compromis dans la
position de l'agent face à des obstacles, comme pour la deuxième règle du
comportement URGENCE
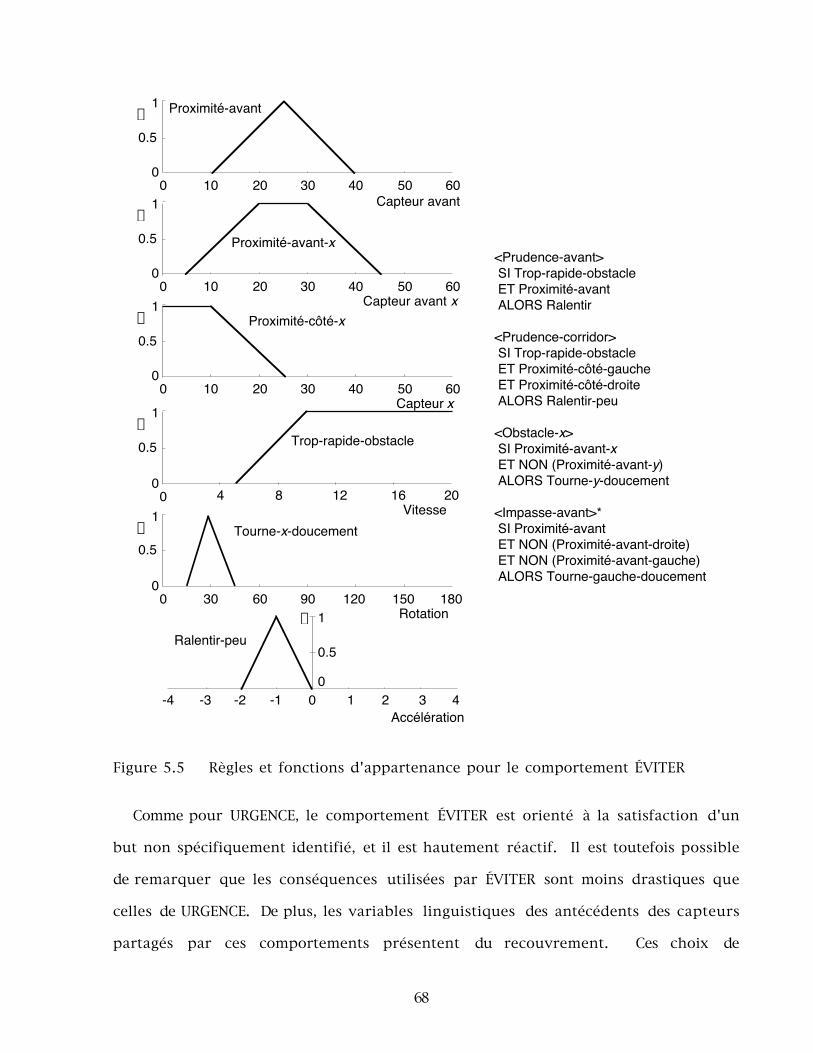
68
!<Prudence-avant> !!SI Trop-rapide-obstacle !!ET Proximité-avant !!ALORS Ralentir
!<Prudence-corridor> !!SI Trop-rapide-obstacle !!ET Proximité-côté-gauche !!ET Proximité-côté-droite!!ALORS Ralentir-peu
!<Obstacle-x> !!SI Proximité-avant-x !!ET NON (Proximité-avant-y) !!ALORS Tourne-y-doucement
!<Impasse-avant>*!!SI Proximité-avant !!ET NON (Proximité-avant-droite) !!ET NON (Proximité-avant-gauche)!!ALORS Tourne-gauche-doucement!
00 10 20 30 40 50 60
Proximité-avant
Capteur avant
0.5
1m
00 10 20 30 40 50 60
Proximité-avant-x
Capteur avant x
0.5
1m
00 10 20 30 40 50 60
Proximité-côté-x
Capteur x
0.5
1m
Trop-rapide-obstacle
Vitesse
00 4 8 12 16 20
0.5
1m
00 30 60 90 120 150 180
Tourne-x-doucement
Rotation
0.5
1m
Ralentir-peu
Accélération-4 -3 -1 0 1 3 42-2
0
m
0.5
1
Figure 5.5 Règles et fonctions d'appartenance pour le comportement ÉVITER
Comme pour URGENCE, le comportement ÉVITER est orienté à la satisfaction d'un
but non spécifiquement identifié, et il est hautement réactif. Il est toutefois possible
de remarquer que les conséquences utilisées par ÉVITER sont moins drastiques que
celles de URGENCE. De plus, les variables linguistiques des antécédents des capteurs
partagés par ces comportements présentent du recouvrement. Ces choix de
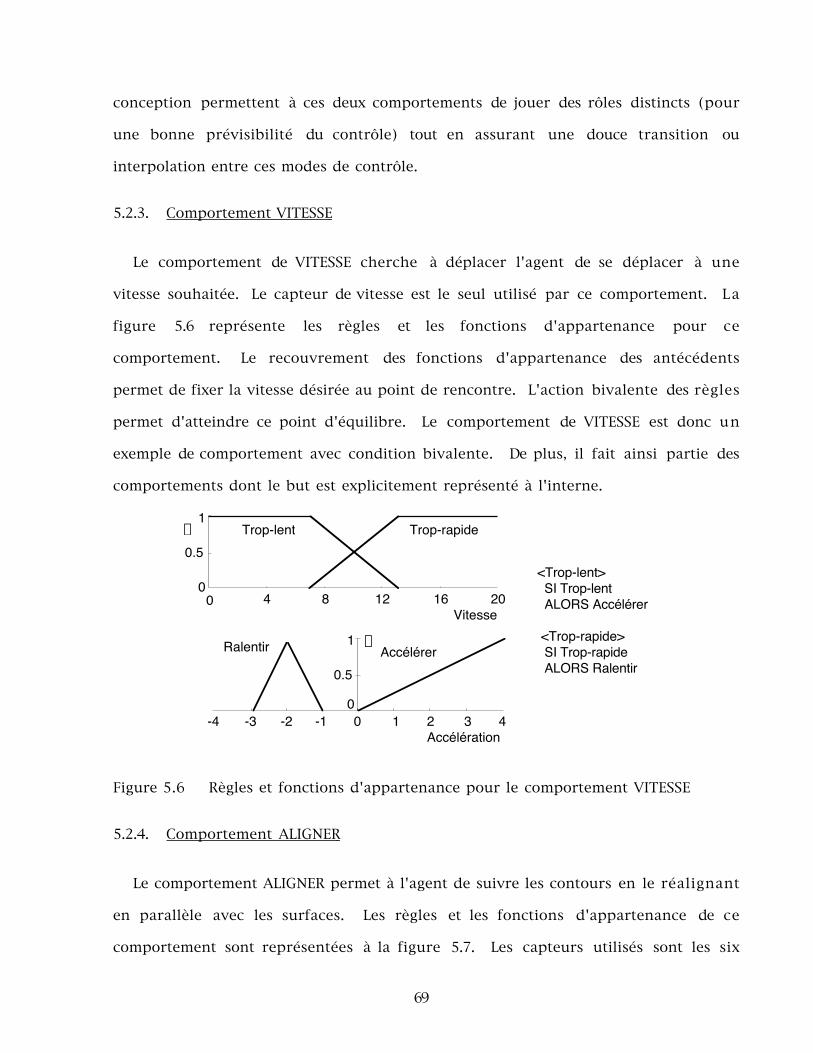
69
conception permettent à ces deux comportements de jouer des rôles distincts (pour
une bonne prévisibilité du contrôle) tout en assurant une douce transition ou
interpolation entre ces modes de contrôle.
5.2.3. Comportement VITESSE
Le comportement de VITESSE cherche à déplacer l'agent de se déplacer à une
vitesse souhaitée. Le capteur de vitesse est le seul utilisé par ce comportement. La
figure 5.6 représente les règles et les fonctions d'appartenance pour ce
comportement. Le recouvrement des fonctions d'appartenance des antécédents
permet de fixer la vitesse désirée au point de rencontre. L'action bivalente des règles
permet d'atteindre ce point d'équilibre. Le comportement de VITESSE est donc un
exemple de comportement avec condition bivalente. De plus, il fait ainsi partie des
comportements dont le but est explicitement représenté à l'interne.
<Trop-lent>!!!SI!Trop-lent !!!ALORS!Accélérer !<Trop-rapide>!!SI!Trop-rapide!!ALORS!Ralentir
-4 -3 -1 0 1 3 42-2
Ralentir Accélérer
Accélération
0
m
0.5
1
00 4 8 12 16 20
Trop-rapideTrop-lent
Vitesse
0.5
1m
Figure 5.6 Règles et fonctions d'appartenance pour le comportement VITESSE
5.2.4. Comportement ALIGNER
Le comportement ALIGNER permet à l'agent de suivre les contours en le réalignant
en parallèle avec les surfaces. Les règles et les fonctions d'appartenance de ce
comportement sont représentées à la figure 5.7. Les capteurs utilisés sont les six

70
capteurs de côté. Pour une meilleure stabilité, le comportement exploite des règles
complémentaires où des antécédents avec recouvrement sont utilisés. Les règles
comportent alors moins d'antécédents mais sont plus nombreuses pour considérer le
recouvrement des fonctions d'appartenance. Il en résulte un ensemble de règles
volumineux pour un contrôle plus "flou". La stratégie de contrôle consiste à ramener
le nez de l'agent en parallèle avec la surface selon les lectures des capteurs avant et
arrière à 45° de chacun de ses côtés. On ramène le nez lorsque l'agent s'éloigne; on
l'éloigne lorsque l'agent s'approche, tout en gardant un éloignement latérale
satisfaisant avec la surface. Les règles utilisées sont symétriques par rapport à
chaque côté sauf pour les conditions Côté-x-médium où la considération de la gauche
comme direction par défaut de ÉVITER et URGENCE demande un peu plus d'ajustement.
Les deux dernières règles permettent de rattraper la surface lors de rotation de coin
externe en ralentissant et en considérant l'éloignement d'un côté mais la proximité du
capteur arrière en angle. La condition de proximité avant dans la dernière règle
permet de ne pas ralentir lorsque l'agent suit normalement une surface.

71
!<Avant-x-proche> !!SI!Proche-avant-x! ALORS!Tourne-y-très-doucement
!<Avant-x-médium>!!SI!Médium-avant-x !!ALORS!Neutre
!<Avant-x-loin>!!SI!Loin-avant-x!!ALORS!Tourne-x-très-doucement
!<Arrière-x-proche>!!SI!Proche-arrière-x!!ALORS!Tourne-x-très-doucement
!<Arrière-x-médium>!!SI!Médium-arrière-x !!ET!NON (Loin-côté-x) !!ALORS!Neutre
!<Arrière-x-loin>!!SI!Loin-arrière-x !!ET!NON (Loin-côté-x)!!ALORS Tourne-y-très-doucement
!<Côté-x-proche>!!SI!Proche-côté-x!!ALORS!Tourne-y-doucement
!<Côté-gauche-médium>!!SI!Médium-côté-gauche !!ALORS!Tourne-droit-très-doucement
!<Côté-droite-médium>!!SI!Médium-côté-droite !!ALORS!Neutre
!<Côté-x-loin>!!SI!Loin-côté-x!!ET!Proximite-arrière-x!!ALORS!Tourne-x-intermédiaire
!<Ralentir-x>!!SI!Proximité-arrière-x!!ET!NON (Proximité-avant-x) !!ALORS!Ralentir
00 10 20 30 40 50 60
0.5
1m
Capteur côté x
Proche-côté-x
Médium-côté-x
Loin-côté-x
00 10 20 30 40 50 60
0.5
1m
Capteur avant x
Proche-avant-x Médium-avant-x
Loin-avant-x
00 10 20 30 40 50 60
0.5
1m
Capteur arrière x
Proche-arrière-x Médium-arrière-x
Loin-arrière-x
-4 -3 -1 0 1 3 42-2
Ralentir
Accélération
0
m
0.5
1
00 30 60 90 120 150 180
Tourne-x-très-
doucement
Tourne-x-intermédiaire
Rotation
0.5
1m
Neutre
Figure 5.7 Règles et fonctions d'appartenance pour le comportement ALIGNER
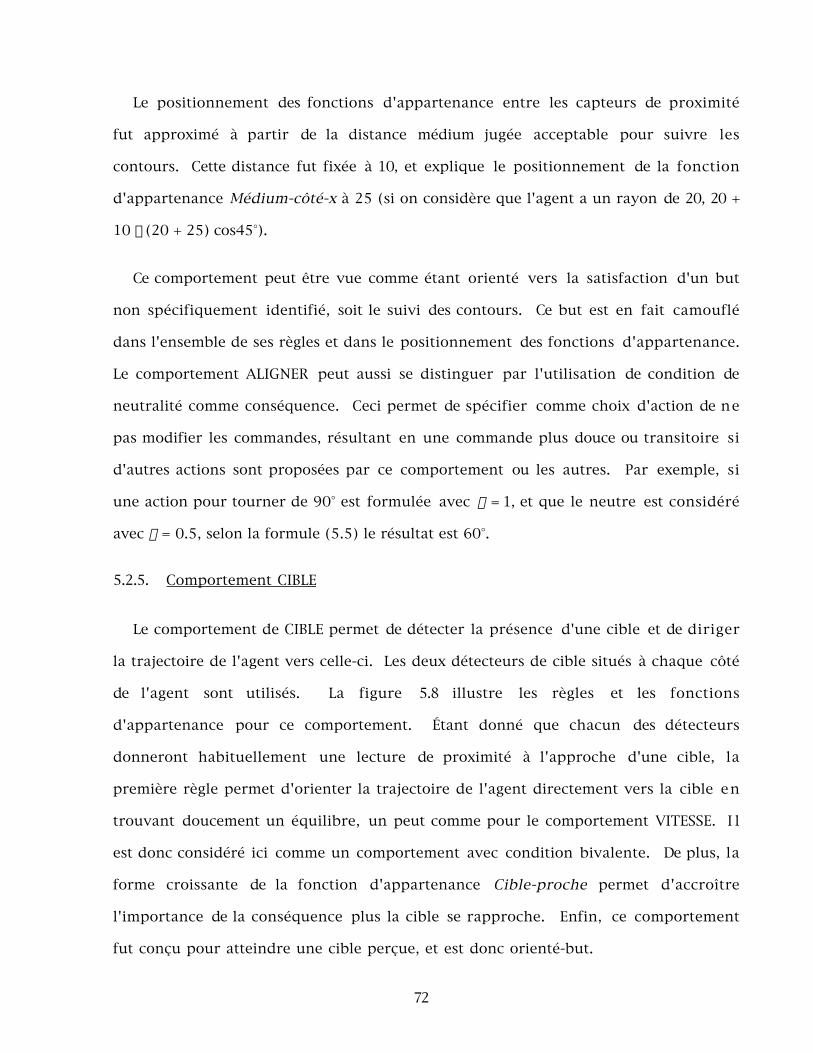
72
Le positionnement des fonctions d'appartenance entre les capteurs de proximité
fut approximé à partir de la distance médium jugée acceptable pour suivre les
contours. Cette distance fut fixée à 10, et explique le positionnement de la fonction
d'appartenance Médium-côté-x à 25 (si on considère que l'agent a un rayon de 20, 20 +
10 ª (20 + 25) cos45°).
Ce comportement peut être vue comme étant orienté vers la satisfaction d'un but
non spécifiquement identifié, soit le suivi des contours. Ce but est en fait camouflé
dans l'ensemble de ses règles et dans le positionnement des fonctions d'appartenance.
Le comportement ALIGNER peut aussi se distinguer par l'utilisation de condition de
neutralité comme conséquence. Ceci permet de spécifier comme choix d'action de ne
pas modifier les commandes, résultant en une commande plus douce ou transitoire si
d'autres actions sont proposées par ce comportement ou les autres. Par exemple, si
une action pour tourner de 90° est formulée avec m = 1, et que le neutre est considéré
avec m = 0.5, selon la formule (5.5) le résultat est 60°.
5.2.5. Comportement CIBLE
Le comportement de CIBLE permet de détecter la présence d'une cible et de diriger
la trajectoire de l'agent vers celle-ci. Les deux détecteurs de cible situés à chaque côté
de l'agent sont utilisés. La figure 5.8 illustre les règles et les fonctions
d'appartenance pour ce comportement. Étant donné que chacun des détecteurs
donneront habituellement une lecture de proximité à l'approche d'une cible, la
première règle permet d'orienter la trajectoire de l'agent directement vers la cible en
trouvant doucement un équilibre, un peut comme pour le comportement VITESSE. I l
est donc considéré ici comme un comportement avec condition bivalente. De plus, la
forme croissante de la fonction d'appartenance Cible-proche permet d'accroître
l'importance de la conséquence plus la cible se rapproche. Enfin, ce comportement
fut conçu pour atteindre une cible perçue, et est donc orienté-but.
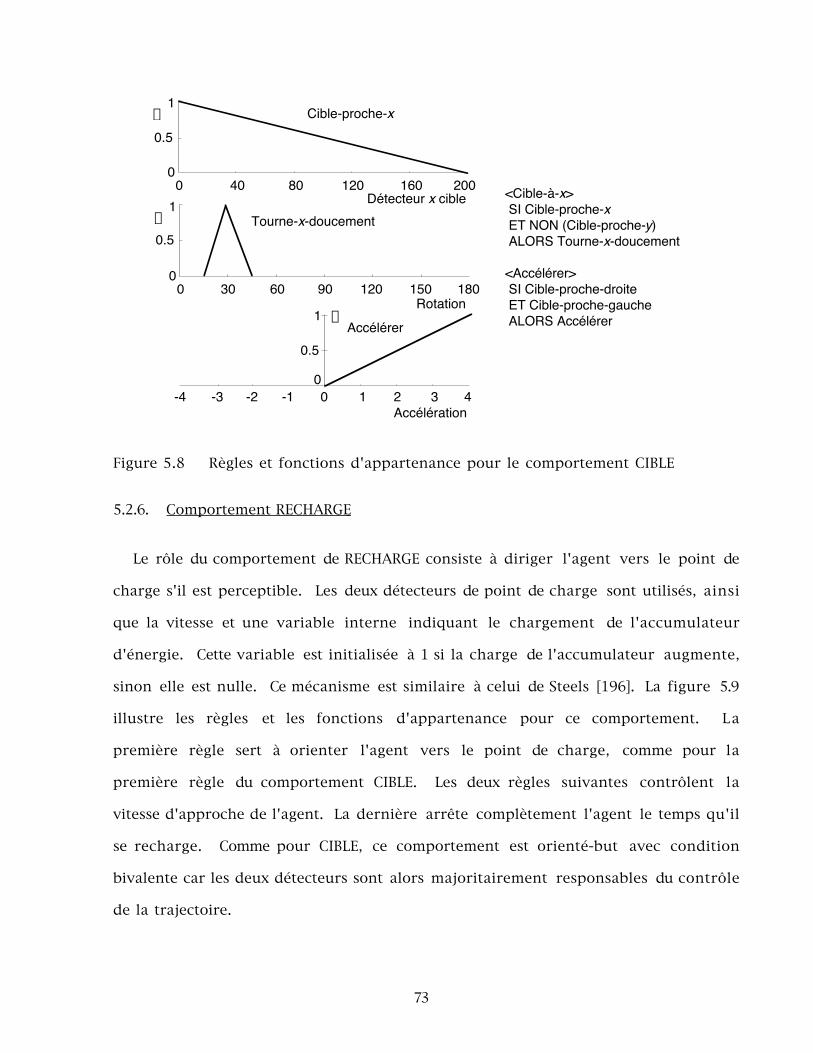
73
!<Cible-à-x> !!SI Cible-proche-x !!ET NON (Cible-proche-y) !!ALORS Tourne-x-doucement
!<Accélérer>!!SI Cible-proche-droite !!ET Cible-proche-gauche !!ALORS Accélérer
00 40 80 120 160 200
0.5
1m Cible-proche-x
Détecteur x cible
00 30 60 90 120 150 180
Tourne-x-doucement
Rotation
0.5
1m
-4 -3 -1 0 1 3 42-2
Accélérer
Accélération
0
m
0.5
1
Figure 5.8 Règles et fonctions d'appartenance pour le comportement CIBLE
5.2.6. Comportement RECHARGE
Le rôle du comportement de RECHARGE consiste à diriger l'agent vers le point de
charge s'il est perceptible. Les deux détecteurs de point de charge sont utilisés, ainsi
que la vitesse et une variable interne indiquant le chargement de l'accumulateur
d'énergie. Cette variable est initialisée à 1 si la charge de l'accumulateur augmente,
sinon elle est nulle. Ce mécanisme est similaire à celui de Steels [196]. La figure 5.9
illustre les règles et les fonctions d'appartenance pour ce comportement. La
première règle sert à orienter l'agent vers le point de charge, comme pour la
première règle du comportement CIBLE. Les deux règles suivantes contrôlent la
vitesse d'approche de l'agent. La dernière arrête complètement l'agent le temps qu'il
se recharge. Comme pour CIBLE, ce comportement est orienté-but avec condition
bivalente car les deux détecteurs sont alors majoritairement responsables du contrôle
de la trajectoire.

74
!<Charge-à-x> !!SI Charge-visible-x !!ET NON (Charge-visible-Y) !!ET NON (Chargement-en-cours)!!ALORS Tourne-x-doucement
!<Ralentir-charge>!!SI Charge-proche-droite !!ET Charge-proche-gauche !!ET Trop-rapide-charge !!ALORS Ralentir-peu
!<Accélérer-charge>!!SI Charge-proche-droite !!ET Charge-proche-gauche !!ET Quasi-immobile ET !!NON (Chargement-en-cours) !!ALORS Accélérer
!<Rechargement>!!SI Chargement-en-cours !!ALORS Ralentir-énormément
00 30 60 90 120 150 180
Tourne-x-doucement
Rotation
0.5
1m
00 40 80 120 160 200
0.5
1m
Charge-visible-x
Détecteur x point de charge
Charge-proche-x
Trop-rapide-charge
Vitesse
00 4 8 12 16 20
0.5
1m
Quasi-immobile
00 1
0.5
1m
Chargement-en-cours
Chargement
Ralentir-énormément
Accélération-4 -3 -1 0 1 3 42-2
0
m
0.5
1
Accélérer
Figure 5.9 Règles et fonctions d'appartenance pour le comportement RECHARGE
5.2.7. Comportement DÉGAGE
Ce comportement est utilisé pour sortir l'agent d'impasse lorsqu'il reste pris à un
endroit de l'environnement. Les capteurs de côté et le capteur arrière sont utilisés.
La figure 5.10 représente les règles et les fonctions d'appartenance pour ce
comportement. Le comportement DÉGAGE permet de faire reculer l'agent à petits pas
en l'éloignant des surfaces à ses côtés. C'est un comportement hautement réactif
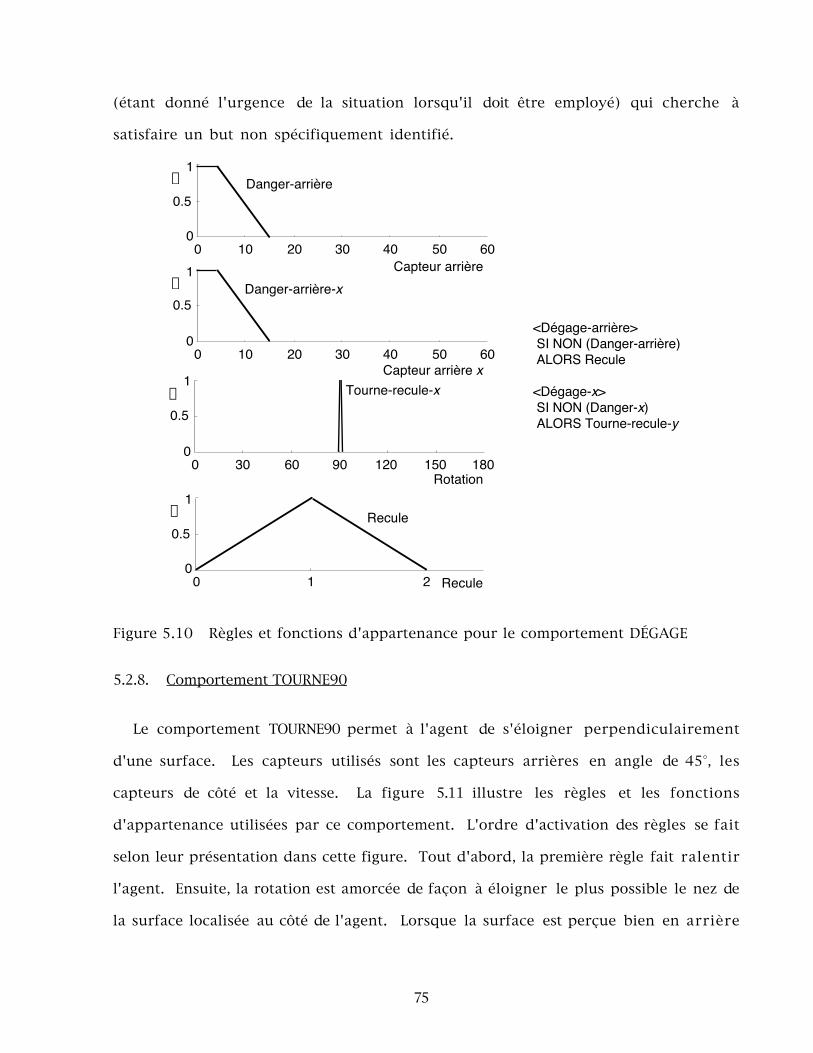
75
(étant donné l'urgence de la situation lorsqu'il doit être employé) qui cherche à
satisfaire un but non spécifiquement identifié.
!<Dégage-arrière> !!SI NON (Danger-arrière) !!ALORS Recule
!<Dégage-x>!!SI NON (Danger-x) !!ALORS Tourne-recule-y
Danger-arrière
Capteur arrière
00 10 20 30 40 50 60
0.5
1m
Danger-arrière-x
Capteur arrière x
00 10 20 30 40 50 60
0.5
1m
00 30 60 90 120 150 180
Tourne-recule-x
Rotation
0.5
1m
00 1 2
0.5
1m Recule
Recule
Figure 5.10 Règles et fonctions d'appartenance pour le comportement DÉGAGE
5.2.8. Comportement TOURNE90
Le comportement TOURNE90 permet à l'agent de s'éloigner perpendiculairement
d'une surface. Les capteurs utilisés sont les capteurs arrières en angle de 45°, les
capteurs de côté et la vitesse. La figure 5.11 illustre les règles et les fonctions
d'appartenance utilisées par ce comportement. L'ordre d'activation des règles se fait
selon leur présentation dans cette figure. Tout d'abord, la première règle fait ralentir
l'agent. Ensuite, la rotation est amorcée de façon à éloigner le plus possible le nez de
la surface localisée au côté de l'agent. Lorsque la surface est perçue bien en arrière

76
de l'agent, il peut alors reprendre tranquillement sa route. La condition de neutralité
dans la dernière règle permet d'adoucir la rotation lorsque l'agent se trouve presque
perpendiculaire à la surface.
!<Immobilisation> !!SI NON (Quasi-immobile)!!ALORS Ralentir-beaucoup
!<Tourne-90-x-début>!!SI Côté-x-proche !!ET Quasi-immobile !!ALORS Tourne-y
<Tourne-90-x>!!SI Proximité-arrière-x !!ET NON (Proximité-arrière-y) !!ET Quasi-immobile !!ALORS Tourne-y
!<Repart>!!SI Proximité-arrière-gauche !!ET Proximité-arrière-droite !!ALORS Accélérer!!ET Neutre
00 2 4 6 8 10
0.5
1m Quasi-immobile
Vitesse
00 10 20 30 40 50 60
0.5
1m Proximité-arrière-x
Capteur arrière x
Capteur côté x
00 10 20 30 40 50 60
0.5
1m Côté-x-proche
00 30 60 90 120 150 180
Tourne-x
Rotation
0.5
1m
Accélération
Ralentir-beaucoup
-4 -3 -1 1 3 42-200
m
0.5
1Accélérer
Neutre
Figure 5.11 Règles et fonctions d'appartenance pour le comportement TOURNE90
Un fait intéressant sur ce comportement est qu'il fonctionne peu importe le sens
dans lequel il doit orienter l'agent. De plus, s'il est activé dans un corridor, aucune
rotation ne sera effectuée. Ceci fait de lui un comportement orienté vers la
satisfaction d'un but non spécifiquement identifié, fondé principalement sur les
conditions bivalentes des capteurs de proximité arrière et en angle.
77
5.2.9. Comportement TOURNE180
Le rôle du comportement TOURNE180 est de permettre à l'agent de faire demi-tour.
Les mêmes capteurs que ceux pour TOURNE90 sont utilisés. La figure 5.12 illustre les
règles et les fonctions d'appartenance utilisées par ce comportement. Comme pour
TOURNE90, les règles sont présentées selon leur ordre habituel d'utilisation. La
première règle commence par immobiliser l'agent. La seconde permet de changer
l'orientation de l'agent pour que la surface se trouve sur son côté désiré. La troisième
permet de continuer la rotation le temps que l'agent se place en parallèle à la surface
avant de repartir. Le sens de rotation et les antécédents faisant référence aux côtés
sont spécifiés via les paramètres internes par le module de cognition. Ceci lui permet
d'être plus général au lieu d'avoir à spécifier deux comportements différents pour
réaliser ce demi-tour dans les deux sens. Ce comportement n'aurait pu être
bidirectionnel comme pour TOURNE90 car il est nécessaire que le point d'arrivée
souhaité soit spécifié (puisque l'agent met quelques cycles avant d'effectuer
complètement la rotation). Ce comportement est hautement réactif et est orienté vers
la satisfaction d'un but explicitement représenté par le module de cognition.
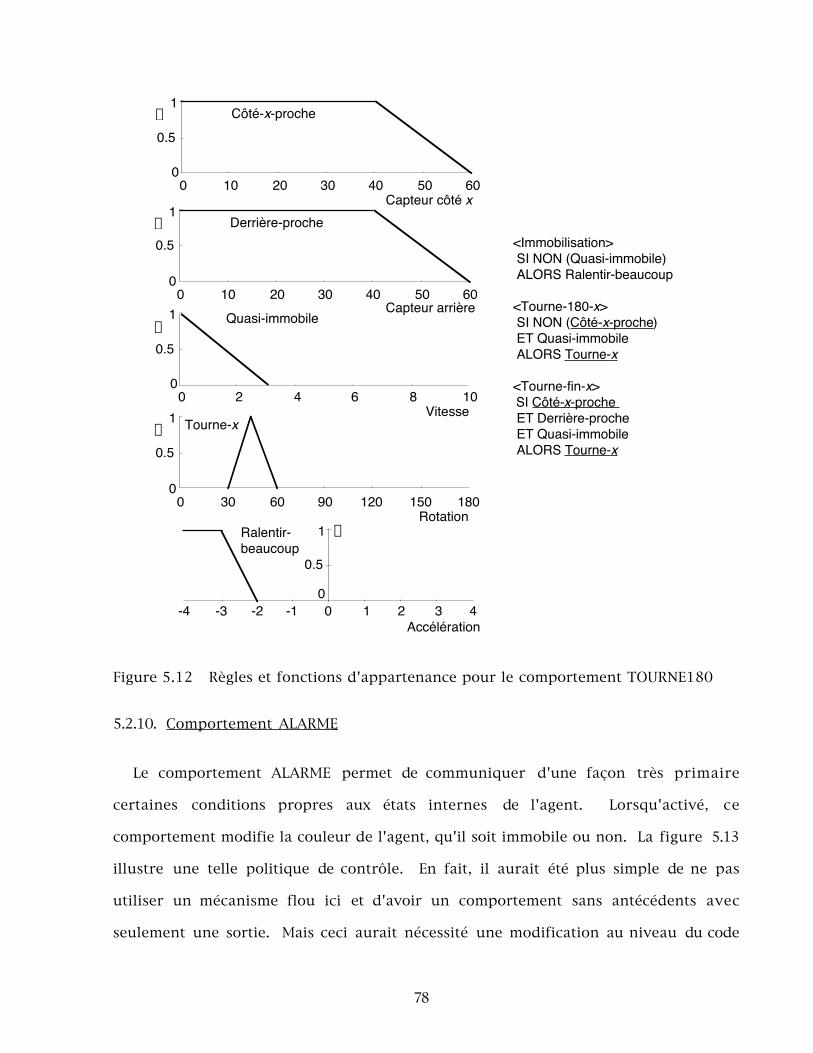
78
00 2 4 6 8 10
0.5
1m
Quasi-immobile
Vitesse
Capteur arrière
00 10 20 30 40 50 60
0.5
1m Derrière-proche
00 30 60 90 120 150 180
Tourne-x
Rotation
0.5
1m
Accélération
Ralentir-beaucoup
-4 -3 -1 1 3 42-200
m
0.5
1
!<Immobilisation> !!SI NON (Quasi-immobile)!!ALORS Ralentir-beaucoup
!<Tourne-180-x>!!SI NON (Côté-x-proche) !!ET Quasi-immobile !!ALORS Tourne-x!!<Tourne-fin-x>!!SI Côté-x-proche !!ET Derrière-proche !!ET Quasi-immobile !!ALORS Tourne-x!
00 10 20 30 40 50 60
0.5
1m Côté-x-proche
Capteur côté x
Figure 5.12 Règles et fonctions d'appartenance pour le comportement TOURNE180
5.2.10. Comportement ALARME
Le comportement ALARME permet de communiquer d'une façon très primaire
certaines conditions propres aux états internes de l'agent. Lorsqu'activé, ce
comportement modifie la couleur de l'agent, qu'il soit immobile ou non. La figure 5.13
illustre une telle politique de contrôle. En fait, il aurait été plus simple de ne pas
utiliser un mécanisme flou ici et d'avoir un comportement sans antécédents avec
seulement une sortie. Mais ceci aurait nécessité une modification au niveau du code
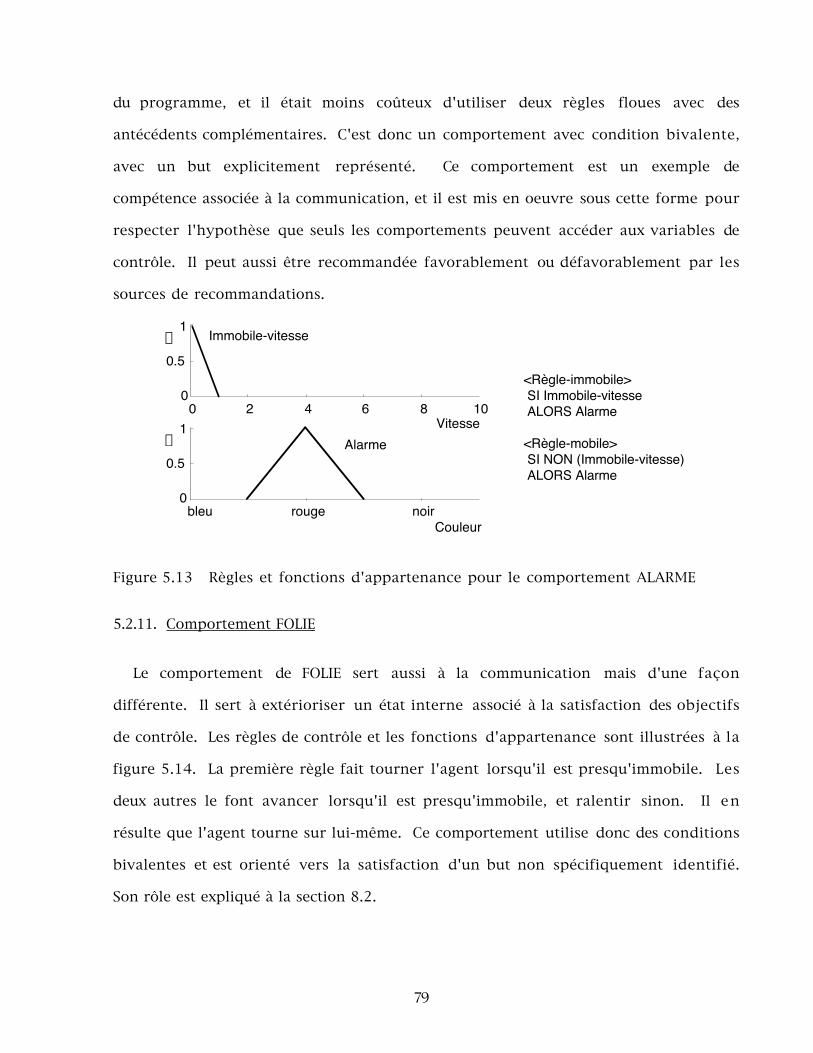
79
du programme, et il était moins coûteux d'utiliser deux règles floues avec des
antécédents complémentaires. C'est donc un comportement avec condition bivalente,
avec un but explicitement représenté. Ce comportement est un exemple de
compétence associée à la communication, et il est mis en oeuvre sous cette forme pour
respecter l'hypothèse que seuls les comportements peuvent accéder aux variables de
contrôle. Il peut aussi être recommandée favorablement ou défavorablement par les
sources de recommandations.
!<Règle-immobile> !!SI Immobile-vitesse !!ALORS Alarme
!<Règle-mobile>!!SI NON (Immobile-vitesse) !!ALORS Alarme
00 2 4 6 8 10
0.5
1m Immobile-vitesse
Vitesse
0bleu rouge noir
0.5
1m
Couleur
Alarme
Figure 5.13 Règles et fonctions d'appartenance pour le comportement ALARME
5.2.11. Comportement FOLIE
Le comportement de FOLIE sert aussi à la communication mais d'une façon
différente. Il sert à extérioriser un état interne associé à la satisfaction des objectifs
de contrôle. Les règles de contrôle et les fonctions d'appartenance sont illustrées à la
figure 5.14. La première règle fait tourner l'agent lorsqu'il est presqu'immobile. Les
deux autres le font avancer lorsqu'il est presqu'immobile, et ralentir sinon. Il en
résulte que l'agent tourne sur lui-même. Ce comportement utilise donc des conditions
bivalentes et est orienté vers la satisfaction d'un but non spécifiquement identifié.
Son rôle est expliqué à la section 8.2.

80
!<Tourne-sur-lui>!!SI Quasi-immobile !!ALORS Tourne-gauche-raide
!<Accélère>!!SI Quasi-immobile !!ALORS Accélérer
!<Ralenti>!!SI NON (Quasi-immobile) !!ALORS Ralentir-énormément
00 2 4 6 8 10
0.5
1m Quasi-immobile
Vitesse
-4 -3 -1 0 1 3 42-2
Ralentir-énormément Accélérer
Accélération
0
m
0.5
1
00 -30 -60 -90 -120 -150 -180
Tourne-gauche-raide
Rotation
0.5
1m
Figure 5.14 Règles et fonctions d'appartenance pour le comportement FOLIE
5.3. Méthodologie dans la conception des comportements flous
Certaines particularités doivent être prises en considération lors de la conception
des comportements flous, principalement au niveau du choix des conséquences floues
utilisées par les règles et au niveau des influences entre les comportements. Au
niveau du choix des conséquences, il faut se rappeler que le degré flou des
conséquences est unifié par disjonction floue avant de réaliser la défuzzification.
Ainsi, si on souhaite qu'une règle puisse formuler une décision floue qui ne risque
pas d'être perdue lors de la fusion par disjonction des conséquences floues, il est
préférable d'utiliser une variable linguistique différente. Par exemple, si un
comportement hautement réactif indique à l'agent qu'il doit tourner de 90° avec m = 1,
et qu'un comportement avec condition bivalente propose qu'il doit tourner à droite et
à gauche de 90° avec m = 1, l'action résultante sera nulle. Par contre, si la condition

81
bivalente est de 85° au lieu de 90°, alors l'action résultante sera de 30° (soit 90° divisé
par 3). Il est donc important d'identifier les règles qui doivent absolument influencer
les actions de l'agent lorsqu'elles sont activées, et d'utiliser alors des conséquences
floues différentes pour ne pas qu'elles soient combinées avec l'action de d'autres
règles. Une condition de neutralité permet aussi de limiter ce genre d'inconvénients.
Une autre source d'information possible est propre aux antécédents des règles, au
positionnement de leur fonction d'appartenance et leur recouvrement. Il faut éviter
de créer des conflits ou de dupliquer des conditions réactives entre les
comportements, et s'assurer d'une bonne transition entre les comportements qui
doivent travailler simultanément. Une schématisation à l'échelle des zones de
détection et des conditions réactives des comportements peuvent servir à éviter ces
problèmes, à bien distinguer leur rôle respectif, et comprendre ce que l'agent peut
considérer pour la prise de décision. La reproduction de condition d'activation de
comportements devant travailler ensemble est aussi une technique utile à l'avantage
des expérimentations simulées. Mais avant, il est important d'avoir validé d'une façon
indépendante les comportements, car toute modification peut occasionner des
ajustements sur les autres comportements. Une méthodologie incrémentale et
empirique est donc de mise.

82
6. CARACTÉRISTIQUES DU MODULE DE MOTIFS CONÇU
Pour les expérimentations avec BugWorld, les motifs permettent à l'agent de jouer
de façon efficace et autonome son rôle dans l'environnement en influençant le choix
des comportements via les sources de recommandations. Le module de motif est donc
présenté dans cette thèse avec les modules de comportement afin de mieux
comprendre ces influences dans les chapitres expliquant les mécanismes utilisés par
les modules de recommandations.
L'objectif général de l'agent est d'effectuer une recherche efficace de
l'environnement pour y atteindre les cibles toute en assurant un bon niveau de
charge de son accumulateur d'énergie. L'agent doit donc gérer différents buts
comme:
- se diriger vers un point de charge pour la recharge d'énergie;
- détecter les conditions inadéquates de fonctionnement de l'agent;
- explorer son environnement à la recherche de cibles et en tirer des
connaissances;
- exploiter ces connaissances lorsqu'elles sont jugées adéquates.
Les motifs sont responsables de superviser l'atteinte de ces buts en fonction de ce
qui est expérimenté et vécu par l'agent. Pour y arriver, ils sont influencés par des
sensations venant de l'environnement ou des ressources internes à l'agent (comme
son niveau d'énergie), l'activation et l'exploitation des comportements, les
connaissances acquises sur l'environnement et le traitement de ces connaissances.
Ils peuvent aussi s'influencer entre eux. L'important est que l'activation des motifs
émerge des circonstances internes et externe vécues par l'agent (et qui dépendent de
ses comportements) afin de rencontrer les hypothèses à la base de SIR.
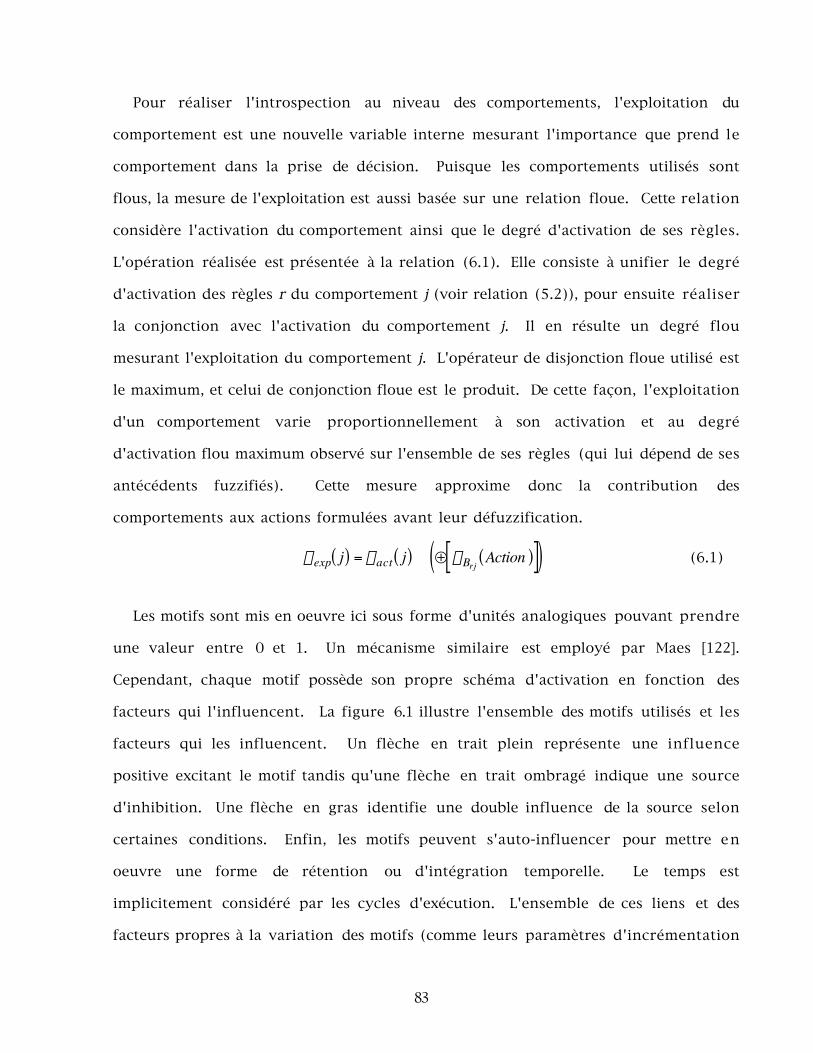
83
Pour réaliser l'introspection au niveau des comportements, l'exploitation du
comportement est une nouvelle variable interne mesurant l'importance que prend le
comportement dans la prise de décision. Puisque les comportements utilisés sont
flous, la mesure de l'exploitation est aussi basée sur une relation floue. Cette relation
considère l'activation du comportement ainsi que le degré d'activation de ses règles.
L'opération réalisée est présentée à la relation (6.1). Elle consiste à unifier le degré
d'activation des règles r du comportement j (voir relation (5.2)), pour ensuite réaliser
la conjonction avec l'activation du comportement j. Il en résulte un degré flou
mesurant l'exploitation du comportement j. L'opérateur de disjonction floue utilisé est
le maximum, et celui de conjonction floue est le produit. De cette façon, l'exploitation
d'un comportement varie proportionnellement à son activation et au degré
d'activation flou maximum observé sur l'ensemble de ses règles (qui lui dépend de ses
antécédents fuzzifiés). Cette mesure approxime donc la contribution des
comportements aux actions formulées avant leur défuzzification.
mexp j( ) = mact j( )ƒ ⊕ mBrjAction( )[ ]( ) (6.1)
Les motifs sont mis en oeuvre ici sous forme d'unités analogiques pouvant prendre
une valeur entre 0 et 1. Un mécanisme similaire est employé par Maes [122].
Cependant, chaque motif possède son propre schéma d'activation en fonction des
facteurs qui l'influencent. La figure 6.1 illustre l'ensemble des motifs utilisés et les
facteurs qui les influencent. Un flèche en trait plein représente une influence
positive excitant le motif tandis qu'une flèche en trait ombragé indique une source
d'inhibition. Une flèche en gras identifie une double influence de la source selon
certaines conditions. Enfin, les motifs peuvent s'auto-influencer pour mettre en
oeuvre une forme de rétention ou d'intégration temporelle. Le temps est
implicitement considéré par les cycles d'exécution. L'ensemble de ces liens et des
facteurs propres à la variation des motifs (comme leurs paramètres d'incrémentation

84
et de décrémentation) ont été choisis de façon à ce que les motifs arrivent à bien
coordonner les intentions de l'agent.
FONCTIONNEMENT
FAIM
MANGER
DÉTRESSE
DÉCEPTION
JOIE
CONFIANCE
CERTITUDE
EXPLORER
EXPLOITERENNUI
Niveau d'énergie
Chargement détecté
Act. & Expl. URGENCE
Act. & Expl. ÉVITER
Act. & Expl. VITESSE
Act. & Expl. DÉGAGE
Activation FOLIE
Activation CIBLE
Exploitation CIBLE
Activation RECHARGE
Exploitation RECHARGE
Influences cognitives
Exploitation TOURNE180
Atteinte cible
PHYSIOLOGIQUE
ACCOMPLISSEMENT
COGNITION
Figure 6.1 Motifs utilisés avec leurs influences
Pour mieux décrire les motifs, ils ont été regroupés en fonction de leurs influences
sur l'agent et ses mécanismes de décision. Pour les expérimentations avec BugWorld,
les motifs agissent sur quatre facteurs: le besoin physiologique d'énergie, le besoin de
bon fonctionnement de l'agent, son besoin d'accomplissement, et l'acquisition et
l'organisation des connaissances sur l'environnement et les interactions de l'agent
avec celui-ci. Les prochaines sections décrivent avec plus de détail ces quatre
groupes de motifs.
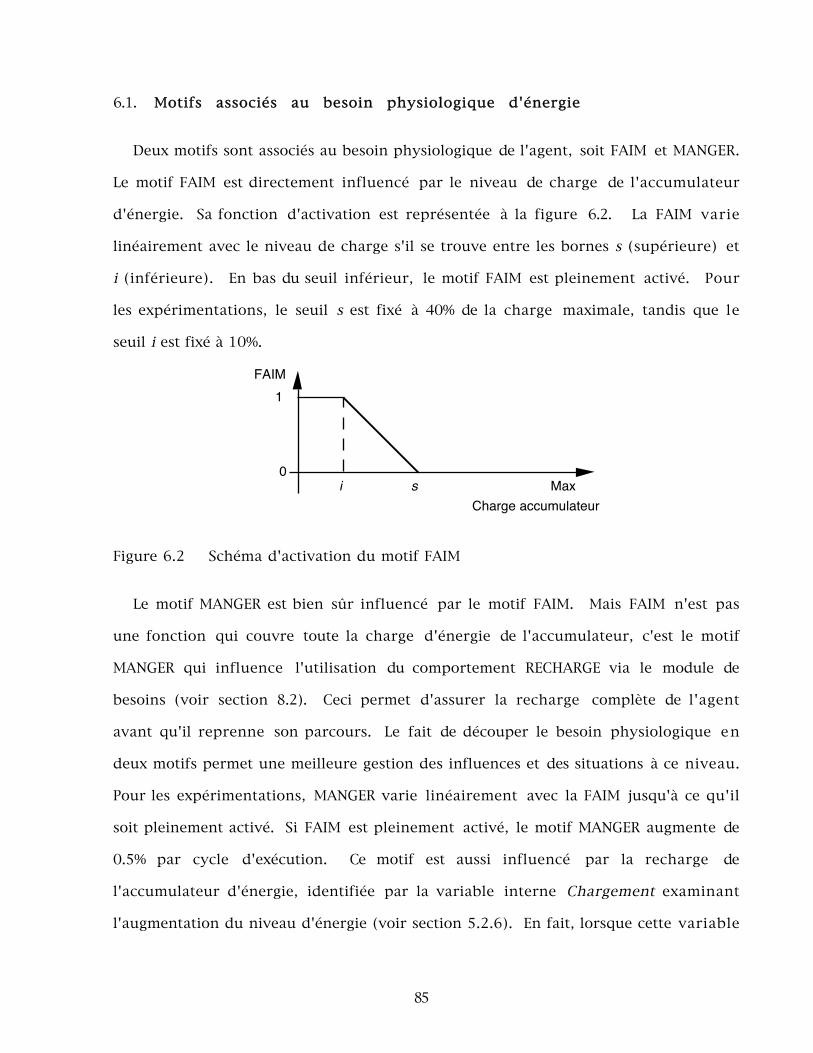
85
6.1. Motifs associés au besoin physiologique d'énergie
Deux motifs sont associés au besoin physiologique de l'agent, soit FAIM et MANGER.
Le motif FAIM est directement influencé par le niveau de charge de l'accumulateur
d'énergie. Sa fonction d'activation est représentée à la figure 6.2. La FAIM varie
linéairement avec le niveau de charge s'il se trouve entre les bornes s (supérieure) et
i (inférieure). En bas du seuil inférieur, le motif FAIM est pleinement activé. Pour
les expérimentations, le seuil s est fixé à 40% de la charge maximale, tandis que le
seuil i est fixé à 10%.
FAIM
Charge accumulateursi Max
1
0
Figure 6.2 Schéma d'activation du motif FAIM
Le motif MANGER est bien sûr influencé par le motif FAIM. Mais FAIM n'est pas
une fonction qui couvre toute la charge d'énergie de l'accumulateur, c'est le motif
MANGER qui influence l'utilisation du comportement RECHARGE via le module de
besoins (voir section 8.2). Ceci permet d'assurer la recharge complète de l'agent
avant qu'il reprenne son parcours. Le fait de découper le besoin physiologique en
deux motifs permet une meilleure gestion des influences et des situations à ce niveau.
Pour les expérimentations, MANGER varie linéairement avec la FAIM jusqu'à ce qu'il
soit pleinement activé. Si FAIM est pleinement activé, le motif MANGER augmente de
0.5% par cycle d'exécution. Ce motif est aussi influencé par la recharge de
l'accumulateur d'énergie, identifiée par la variable interne Chargement examinant
l'augmentation du niveau d'énergie (voir section 5.2.6). En fait, lorsque cette variable

86
est activée, MANGER est maintenu à sa pleine activation. L'agent fait alors preuve
d'opportuniste en arrêtant de se recharger dès que sa charge d'énergie augmente
(soit lorsque l'agent atteint un point de charge). Le motif FAIM devrait alors
s'inhiber complètement, et MANGER est maintenu tant que l'accumulateur n'a pas
atteint sa charge maximale. Le motif MANGER est alors réinitialisé à 0. Enfin, ce
motif est pleinement activé par le module de cognition lorsqu'une trajectoire
planifiée vers une cible ne peut être atteinte avec le niveau de charge de
l'accumulateur d'énergie à ce point.
6.2. Motifs associés au besoin de bon fonctionnement de l'agent
Deux motifs sont associés au bon fonctionnement de l'agent. Le premier est le
motif DÉTRESSE et il sert à détecter les conflits entre les intentions de l'agent et
l'exploitation de ses comportements. Ces situations peuvent survenir à cause d'une
situation imperceptible empêchant l'agent de se déplacer correctement dans
l'environnement, ou par un conflit imprévu dans les décisions prises par les
comportements activés. L'introspection est considérée ici en examinant les
divergences possibles entre ce qui est désiré (le choix des comportements) et ce qui
en résulte (leur exploitation). La discrimination des comportements au niveau des
règles permet de mieux comprendre comment ces divergences peuvent être
identifiées. Par exemple, l'exploitation de comportements hautement réactifs comme
URGENCE et ÉVITER ne doit pas rester constante ou non nul très longtemps: ces
comportements servent à déplacer rapidement l'agent et ils sont normalement
exploités sur de courte période. Sinon, l'agent a certainement quelques difficultés à
se déplacer. Par contre, l'activation d'un comportement à condition bivalente comme
VITESSE doit résulter en un état d'équilibre dans le degré d'exploitation du
comportement: pour VITESSE, le déplacement de l'agent à vitesse constante s'observe
par un degré d'exploitation constante de 0.5. Une exploitation unitaire de ce

87
comportement sur une longue période indique que l'agent désire avancer, mais que
quelque chose l'en empêche.
Au niveau contrôle, le motif DÉTRESSE sert à activer le comportement DÉGAGE via le
module de besoins (voir section 8.2). D'une façon plus spécifique, les conditions
d'excitation utilisées pour le motif DÉTRESSE sont:
- Moyenne sur dix cycles de la somme non nulle de l'exploitation des
comportements URGENCE et ÉVITER. Une moyenne constante (sous une tolérance de
0.01) fait incrémenter le motif DÉTRESSE d'un maximum de 5% en fonction de la
variation de la moyenne entre les cycles. Sinon, le motif est décrémenté de 1%. Un
décrément plus petit est utilisé ici pour ne pas oublier trop rapidement les conditions
passées à cause d'une légère divergence dans la moyenne. L'opérateur moyenne
permet de considérer l'exploitation constante ou oscillante de ces comportements et
d'intégrer plus facilement les petites variations d'exploitation entre les cycles;
- Activation constante du comportement ÉVITER sans être exploité, sur une période
de plus de 20 cycles d'exécution consécutifs. Le motif DÉTRESSE est alors
incrémenté de 5% par cycle;
- Activation maximale des comportements URGENCE et ÉVITER sans qu'ils soient
exploités, incrémentant le motif DÉTRESSE de 5% par cycle d'exécution;
- Activation et exploitation maximales du comportement VITESSE sur plus de huit
cycles. Puisque cette condition survient normalement lors d'un départ de
l'agent, il est nécessaire d'utiliser un compteur pour identifier la situation
problématique. Le motif DÉTRESSE est alors incrémenté de 5% par cycle
d'exécution. Lorsque le comportement DÉGAGE entre en action, le niveau de
DÉTRESSE est maintenu constant sur un maximum de dix cycles tant que
l'exploitation et l'activation de DÉGAGE sont égaux. Ceci permet de laisser un peu
plus de temps à l'agent pour se dégager.

88
En l'absence de ces influences, le motif DÉTRESSE est décrémenté de 30% par cycle
d'exécution, tant qu'il n'est pas nul.
Le second motif associé au bon fonctionnement de l'agent est DÉCEPTION. Ce motif
sert à détecter l'éloignement de l'agent par rapport à un but qu'il désire atteindre.
Par exemple, lorsque l'agent s'éloigne perpendiculairement à une cible ou un point
de charge, il est possible que ses détecteurs ne peuvent provoquer un différentiel de
rotation suffisant pour le faire tourner et l'orienter vers cet objectif. Ce phénomène
peut toutefois être détecté en observant une diminution de l'exploitation des
comportements visant à orienter l'agent vers de tels objectifs. Ainsi, une diminution
de l'exploitation des comportements RECHARGE ou CIBLE (lorsque ces comportements
sont respectivement activés) indiquent à l'agent qu'il s'éloigne de son objectif, ce qui
fait incrémenter le motif DÉCEPTION. La priorité est donnée au comportement
RECHARGE. L'augmentation de ce motif s'effectue lorsque l'exploitation de ces
comportements est faible pour leur laisser une plus grande latitude pour tenter
d'orienter eux-mêmes la trajectoire de l'agent. De plus, l'incrément associé au
comportement RECHARGE est de 20% par cycle, soit le double de celui du
comportement CIBLE pour illustrer l'importance différente de la DÉCEPTION par
rapport à ces deux situations. Lorsque ce motif est pleinement activé, il incite l'agent
à faire demi-tour en recommandant l'activation de TOURNE180 via le module de
cognition (voir section 7.7.2). Dès que ce comportement exploité, le motif DÉCEPTION
est placé à demi-activation pour ne pas formuler à nouveau cette recommandation
tout en assurant une certaine rétention au cas d'un mauvais fonctionnement des
conditions pour faire demi-tour.
6.3. Motif associé au besoin d'accomplissement
Le rôle fondamental de l'agent dans l'environnement est d'atteindre des cibles. Il a
donc une seule tâche à réaliser qui affecte directement son besoin d'accomplissement,
89
considéré ici par le motif JOIE. Ce motif vient influencer l'activation des
comportements CIBLE et FOLIE via le module de besoins (voir section 8.2). Il est
incrémenté de 30% lorsqu'une cible est atteinte; sinon il est décrémenté de 2.5% à
chaque cycle d'exécution. Ces variations sont permises lorsque l'agent n'est pas en
train de se recharger afin de garder ce motif constant durant cette période. Ces
variations sont aussi bloquées lors de l'activation du comportement de FOLIE sur une
période de huit cycles. Cette période fut choisie en fonction de la rotation formulée
par ce comportement (soit 135°, voir section 5.2.11) pour permettre à l'agent de
repartir dans la même direction après l'avoir utilisé. Ceci est possible seulement si
aucun autre comportement affecte la trajectoire de l'agent. une fois le décompte des
cycles d'activation de FOLIE atteint, le motif JOIE est initialisé à 50%, et l'agent peut
reprendre sa trajectoire.
6.4. Motifs associés à la cognition
Ces motifs jouent un rôle au niveau de la planification et la gestion des
connaissances par le module de cognition. Cinq motifs y sont utilisés. Les motifs
CONFIANCE et CERTITUDE sont à la base de ces motifs. Ils sont principalement
influencés par des facteurs propres au module de cognition, ces influences étant
décrites aux sections 7.4.5 et 7.5.3 respectivement. Sommairement, le motif CONFIANCE
est associé à la capacité de l'agent de se localiser par rapport à une trajectoire passée
mémorisée dans son graphe topologique. Le motif CERTITUDE reflète sa capacité de
planifier des trajectoires à partir de son graphe topologique afin d'atteindre un
objectif donné. Outre ses influences cognitives, le motif CERTITUDE est maintenu à un
niveau de 0.4 lorsque le comportement RECHARGE est exploité, si CERTITUDE se
trouvait à un état d'activation supérieur à ce seuil. Ceci bloque toute
recommandations basée sur ce motif pour donner priorité à la recharge.

90
Les trois autres motifs servent à affecter le traitement effectué par le module de
cognition. Tout d'abord, le motif EXPLORER indique à l'agent quant il peut partir
explorer son environnement en activant le comportement TOURNE90. Ceci lui permet
de se former des connaissances sur son environnement par la construction de
nouvelles branches dans son graphe topologique. Par contre, lorsque l'agent se sent
bien en confiance dans son environnement, il peut cesser de vouloir l'explorer pour
plutôt exploiter les connaissances qu'il possède. Le motif EXPLOITER reflète ce désir,
et influence aussi le motif EXPLORER. D'une façon plus précise, le motif EXPLORER
varie proportionnellement au motif CONFIANCE tant que le motif EXPLOITER n'a pas
atteint un niveau d'activation supérieur ou égal à 0.9. L'agent juge alors qu'il connaît
assez son environnement pour exploiter ses connaissances. Le motif EXPLORER est
aussi redescendu à un niveau de 0.8 s'il était pleinement activé durant l'activation du
comportement RECHARGE ou l'exploitation de CIBLE, favorisant l'atteinte de ces
objectifs par rapport à l'exploration de l'environnement. Pour sa part, le motif
EXPLOITER incrémente de 0.0045 par cycle d'exécution, multiplié par le niveau de
CONFIANCE. Ainsi, plus l'agent se sent en confiance dans son environnement et plus
longtemps il se sent en confiance, plus il souhaite exploiter les connaissances tirées
de ses interactions avec lui. En absence de confiance, le motif EXPLOITER est
décrémenté de 5% par cycle d'exécution. Par contre, si le graphe topologique de
l'agent est complètement rempli, alors il n'a pas d'autres choix que d'exploiter ses
connaissances et d'incrémenter le motif EXPLOITER à un niveau supérieur à 0.9.
Enfin, le motif peut ensuite être pleinement activé lorsque l'agent atteint un point de
charge et qu'il en profite pour optimiser son graphe topologique, comme il est
expliqué à la section 7.6.
Le dernier motif, ENNUI, permet d'évaluer la capacité de l'agent d'exploiter ses
connaissances et l'atteinte de ses objectifs. Lorsque EXPLOITER est pleinement activé,
le motif ENNUI est incrémenté de 0.7% par cycle d'exécution tant que l'agent n'est pas

91
en mesure de planifier des trajectoires vers une cible non préalablement visitée
(suite à l'optimisation) ou un point de charge. Si un trajet est planifié, alors ce motif
est réinitialisé à 0. Le motif ENNUI est aussi décrémenté de 30% lorsque le motif JOIE
est incrémenté, soit lorsqu'une cible est atteinte (ceci est plus général au cas où
plusieurs objectifs seraient rattachés au besoin d'accomplissement de l'agent). Cette
influence donne un léger sursis pour l'exploitation des connaissances lorsque la cible
atteinte ne fait pas partie d'une trajectoire planifiée. Lorsque les comportements
CIBLE ou RECHARGE sont exploités, le motif ENNUI est maintenu constant pour laisser
le temps à l'agent d'arriver à son objectif perçu. Une fois le motif ENNUI pleinement
activé, il inhibe complètement le motif EXPLOITER pour que l'agent reprenne
l'exploration de son environnement. Et en désactivant EXPLOITER, le motif ENNUI se
réinitialise automatiquement à zéro.
92
7. CARACTÉRISTIQUES DU MODULE DE COGNITION CONÇU
Le présent chapitre expose les caractéristiques du module de cognition conçu pour
les expérimentations avec BugWorld. Ce module permet à un agent de mémoriser ses
interactions avec l'environnement externe et entre ses états internes, et de s'en
servir comme source de connaissances. Les connaissances sont représentées sous
forme d'un graphe topologique construit à partir de points de repère identifiés lors du
déplacement de l'agent dans l'environnement. Un comportements d'identification de
formes topologiques lui permet de construire ce graphe. Il peut alors s'en servir pour
se localiser par rapport à un endroit déjà visité, annexer des informations
importantes concernant ses états internes, et planifier sa trajectoire en fonction de
ses objectifs de réalisation. Les influences du module de cognition se manifeste par la
formulation de recommandations cognitives de comportements, l'affectation de leur
réactivité par la modification d'antécédents ou de conséquences de règles, et
l'excitation de motifs.
Trois objectifs de conception sont poursuivis par ce module. Le premier est
d'enregistrer seulement ce qui est nécessaire, selon la même hypothèse de Agre et
Chapman [3] considérant les plans comme un guide d'actions. Ceci est très important
pour la préservation de l'émergence et établir un couplage efficace de la délibération
du module de cognition avec la réactivité du module de comportements. La carte
topologique construite lors de l'exploration de l'environnement par l'agent sert donc
de ressource adaptative de planification, comme le fait Engelson et McDermott [61]
mais avec une méthode différente. Le second est la mise en oeuvre d'une cognition
située [47]. Une approche qui se trouve la plus proche de la notion de cognition située
est celle du graphe topologique de Mataric [47, 128, 129]. Clancey [47] note toutefois
que la construction de ce graphe devrait être couplé avec la coordination de haut
niveau, ce qui est affecté ici par les motifs. Enfin, une attention particulière fut

93
portée lors de la conception des mécanismes de ce module pour faciliter leur mise en
oeuvre sur des plate-formes physiques ne demandant pas des capacités importantes de
calcul et de mémorisation.
L'utilisation d'une représentation topologique est une propriété importante à
considérer pour la navigation de robots, de par son lien avec les représentations
utilisées par les animaux [143] et les humains [114]. Il existe plusieurs méthodes
utilisant des informations topologiques comme représentation de l'environnement,
comme entre autres [58, 59, 108, 109, 114]. Plus proche des techniques pour les agents
situés, Smithers [192] par exemple utilise un RNA de type Kohonen pour apprendre les
séquences de noeuds topologiques. Cette méthode n'est toutefois pas réversible. Il y a
aussi Simmons et Koenig [184] qui proposent un algorithme de graphe topologique
utilisant des modèles de Markov partiellement observable pour indiquer la
connectivité entre des lieux topologiques. Cet algorithme permet de combiner
l'information topologique et métrique. Mais l'énumération et l'explication de ces
méthodes débordent du cadre de la thèse. D'une façon générale, ces approches
diffèrent selon les capacités perceptuelles permises pour l'identification et la
reconnaissance de point de repère (données géométriques ou mesures), la structure
du graphe topologique utilisée, les hypothèse de base concernant les noeuds (unicité,
distinction), les méthodes de traitement du graphe topologique et son influence sur
les actions de l'agent. L'algorithme de graphe topologique présenté dans ce chapitre
est donc conçu de façon à répondre aux capacités de l'agent, à ses besoins et aux
principes conceptuels de SIR.
Comparativement à la mise en oeuvre des autres modules de SIR, le module de
cognition est beaucoup plus complexe, prouvant que la délibération est une fonction
de l'intelligence plus évoluée que la réactivité. Tout d'abord, une description
générale des caractéristiques et des composantes du module de cognition est présentée

94
à la section 7.1. Ces composantes sont décrites avec plus de détail aux sections 7.2 à 7.7.
Enfin, la section 7.8 présente les avantages et les limitations concernant l'utilisation
de ces mécanismes pour la mise en oeuvre du module de cognition.
7.1. Caractéristiques générales et composantes du module de cognition
Selon la problématique décrite à la section 4.3 concernant les expérimentations à
réaliser avec BugWorld, l'agent doit rechercher les cibles sans avoir a priori des
informations sur leur localisation dans l'environnement. Le module de cognition doit
donc assurer la construction d'une représentation interne de la trajectoire suivie par
l'agent afin de la situer face aux endroits déjà visités, planifier au besoin des
trajectoires et optimiser l'utilisation de cette représentation. La construction d'une
représentation interne pour un environnement inconnu est une problématique qui
est abordée par certains chercheurs comme [12, 59, 58]. Une importante source
d'inspiration lors de la conception du module de cognition et de son graphe
topologique sont les travaux de Mataric [128, 129]. Cette approche utilise un
comportement pour détecter des lieux topologiques selon la longueur de différents
contours orientés. La détection de ces lieux résulte d'un effet de bord du
comportement d'exploration émergeant. Ces lieux sont ensuite organisés dans un
graphe bidirectionnel représentant leur proximité entre eux. L'approche mise en
oeuvre ici est similaire au niveau du principe, mais très différente au niveau des
mécanismes. Ces différences sont présentées lors de la description des composantes
du module de cognition.
Les différentes composantes du module de cognition sont illustrées à la figure 7.1.
Le graphe topologique y est construit à partir de formes perçues par un
comportement d'identification. Il arrive aussi à intégrer d'autres informations en
mémorisant des états internes comme des motifs (par exemple, la DÉTRESSE peut servir

95
à identifier des endroits dangereux, tandis que la JOIE peut faire référence à un lieu
intéressant pour l'agent), des sensations particulières identifiant des conditions
spéciales (comme le chargement de l'accumulateur d'énergie), la recommandation de
comportement ou leur sélection. Toutes ces sources d'informations servent à bien
identifier le contexte utile pour bien caractériser la situation d'occurrence ou qui
émerge lors de l'acquisition des connaissances. Pour respecter Agre et Chapman [3],
il ne faut pas enregistrer toutes les conditions venant des autres modules.
L'important, c'est de mémoriser que les conditions spéciales d'opération nécessaires
pour reproduire une trajectoire ou pour identifier des conditions particulières de
fonctionnement lors de la construction du graphe. Ce graphe topologique peut
ensuite servir au positionnement de l'agent par rapport à ses trajectoires passées,
planifier son trajet et ses actions pour atteindre des buts ou éviter des endroits, et
optimiser ou organiser ses connaissances. L'ensemble de ces mécanismes affecte la
formulation de recommandations cognitives et le transfert de paramètres internes
vers les comportements si c'est nécessaire. Ces mécanismes viennent aussi
influencer les motifs, comme il fut indiqué à la section 6.4.

96
Construction du graphe
Comportement d'identification de formes topologiques
Forme topologique
Positionnement
Planification
Formulation de recommandations
cognitives et de
paramètres internes de
comportements
Motifs,Intentions,
Recommandations
Optimisation
Paramètres internesvers le module de comportements
COMPORTEMENTSSensations
SÉLECTI
ON
FINALE
Recomm.cognitives
Influences sur les motifs
Figure 7.1 Architecture du module de cognition
7.1.1. Notes sur l'orientation et la construction de graphe topologique
Un agent qui utilise des capteurs de proximité pour naviguer dans un
environnement peut être comparé à un aveugle placé sur une chaise roulante et qui
se sert de sa canne à différents angles pour localiser les obstacles qui se trouvent prêt
de lui. En examinant la séquence des formes qu'il est en mesure de reconnaître en
cours de déplacement par un tel procédé, il peut se former une représentation
interne de la disposition des objets dans son environnement. La problématique de
l'agent dans BugWorld est donc similaire.
Un estimé de l'orientation semble essentiel pour construire une représentation
topologique efficace et performante. Une possibilité est d'exploiter un système de
localisation global (GPS) donnant une position dans le plan (x, y) avec un certain

97
degré de précision pour dégager l'orientation et la position de l'agent lors de sa
trajectoire. L'environnement simulé est en mesure de fournir une telle information,
mais elle ne convient pas à une mise en oeuvre pratique et réaliste pour des systèmes
devant oeuvrer dans des environnements inconnus.
Une seconde possibilité est d'exploiter des capteurs supplémentaires pour obtenir
une lecture de la rotation ou l'orientation instantanée de l'agent. En pratique, un
compas peut être utilisé (comme le fait Mataric [128, 129]), mais ce dispositif est
imprécis et facilement faussé par les sources magnétiques environnantes. Le calcul
du différentiel entre la vitesse perçue des roues peut aussi servir à approximer la
rotation effectuée. Mais avec l'environnement simulé, la lecture de ces variables est
sans erreur et risque de ne pas correspondre à une situation réaliste. La
problématique consisterait alors à modéliser le fonctionnement imparfaits de
capteurs physiques, ce qui déborde du cadre de la thèse (voir chapitre 4). De plus, un
des objectifs de SIR est de tenter d'exploiter le plus efficacement possible les
sensations disponibles pour contrôler de façon intelligente l'agent. L'ajout de
capteurs ne fut donc pas une solution retenue.
Comme pour l'aveugle, pour pouvoir approximer la rotation à partir de ce qui est
perçu, il suffit d'examiner les transitions dans les formes topologiques identifiées.
C'est ce principe qui est utilisé par le graphe topologique pour obtenir une indication
de la rotation effectuée par l'agent. Cette nouvelle méthode respecte directement la
préservation de l'émergence dans l'architecture de SIR car elle est basée sur la
perception de l'environnement et des capacités d'actions de l'agent. Par exemple, les
variations de la vitesse au cours des déplacements de l'agent sont implicitement
considérées par l'examen des séquences de formes topologiques identifiées. L'objectif
ici est donc de vérifier si l'agent peut avoir une intelligence de type cognitive et

98
arriver à s'adapter aux différentes situations même si il a une capacité de
représentation imparfaite ou imprécise.
7.2. Comportement d'identification de formes perceptuelles pour l a
construction du graphe topologique
Pour la construction du graphe topologique, un comportement d'identification sert
à inférer des formes topologiques perceptibles. Le rôle de ce comportement est de
fournir une interprétation linguistique de ce qui se passe dans l'environnement à
partir de ce que l'agent peut en percevoir à chaque cycle d'exécution. Comme illustré
à la figure 7.1, le comportement d'identification de formes topologiques ne fournit pas
une sortie acheminée aux actuateurs, mais plutôt une sortie virtuelle (soit un
paramètre interne) utile pour le module de cognition. Son rôle est différent du
comportement d'identification de Mataric [128, 129] qui lui sert plutôt à construire
directement les noeuds du graphe, intégrant des informations sur la longueur,
l'orientation (par mesure d'un compas), et la position sur plusieurs cycles d'exécution.
Ce comportement d'identification caractérise par deux états les sensations venant
de quatre capteurs, soit ceux en avant, en arrière et sur les côtés, pour inférer une des
seize formes topologiques possibles. Le tableau 7.1 présente les formes topologiques
identifiables par le comportement d'identification. Il aurait été possible de percevoir
256 formes topologiques différentes si les capteurs en angle avaient été utilisés, mais
ceci n'aurait qu'augmenté le niveau de complexité d'identification sans amener une
précision supplémentaire utile pour la construction et l'utilisation efficace du graphe
topologique.
TABLEAU 7.1 FORMES TOPOLOGIQUES IDENTIFIABLES
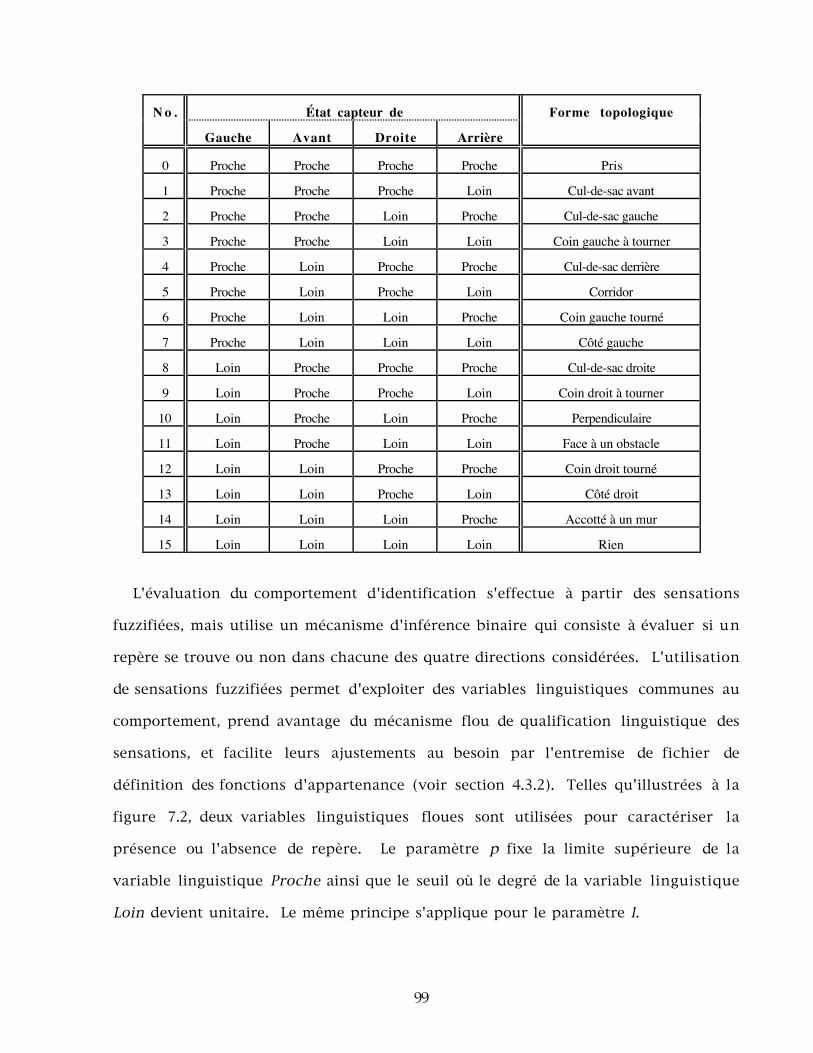
99
N o . État capteur de Forme topologique
Gauche Avant Droite Arrière
0 Proche Proche Proche Proche Pris
1 Proche Proche Proche Loin Cul-de-sac avant
2 Proche Proche Loin Proche Cul-de-sac gauche
3 Proche Proche Loin Loin Coin gauche à tourner
4 Proche Loin Proche Proche Cul-de-sac derrière
5 Proche Loin Proche Loin Corridor
6 Proche Loin Loin Proche Coin gauche tourné
7 Proche Loin Loin Loin Côté gauche
8 Loin Proche Proche Proche Cul-de-sac droite
9 Loin Proche Proche Loin Coin droit à tourner
10 Loin Proche Loin Proche Perpendiculaire
11 Loin Proche Loin Loin Face à un obstacle
12 Loin Loin Proche Proche Coin droit tourné
13 Loin Loin Proche Loin Côté droit
14 Loin Loin Loin Proche Accotté à un mur
15 Loin Loin Loin Loin Rien
L'évaluation du comportement d'identification s'effectue à partir des sensations
fuzzifiées, mais utilise un mécanisme d'inférence binaire qui consiste à évaluer si un
repère se trouve ou non dans chacune des quatre directions considérées. L'utilisation
de sensations fuzzifiées permet d'exploiter des variables linguistiques communes au
comportement, prend avantage du mécanisme flou de qualification linguistique des
sensations, et facilite leurs ajustements au besoin par l'entremise de fichier de
définition des fonctions d'appartenance (voir section 4.3.2). Telles qu'illustrées à la
figure 7.2, deux variables linguistiques floues sont utilisées pour caractériser la
présence ou l'absence de repère. Le paramètre p fixe la limite supérieure de la
variable linguistique Proche ainsi que le seuil où le degré de la variable linguistique
Loin devient unitaire. Le même principe s'applique pour le paramètre l.

100
Capteur-i-proche Capteur-i-loin
Capteur i
m
l p
Figure 7.2 Fonctions d'appartenance pour l'identification de formes
Le processus d'inférence utilisé consiste à choisir, pour chacune des quatre
directions considérées, la variable linguistique ayant le degré d'appartenance la plus
grand comme l'indique la relation (7.1).
ÉtatCapteur = arg max mProche Capteuri( ),mLoin Capteuri( )( ) (7.1)
La variable linguistique prévalante, soit Proche ou Loin, est convertie en binaire
(0 pour Proche, et 1 pour Loin), et il en résulte 24 ou seize formes identifiables. La
valeur sur quatre bits de cette conversion binaire, dans l'ordre présenté des capteurs
au tableau 7.1, donne le numéro de la forme identifiée. Ce traitement est équivalent à
utiliser seize règles binaires ayant comme antécédents les différentes combinaisons
d'états de capteurs et inférant une forme topologique.
Un processus flou aurait pu être utilisé en considérant seize règles basées sur ces
conditions et en utilisant une défuzzification de type maximum. Mais ceci aurait
augmenté la complexité du comportement pour en obtenir le même résultat qu'avec la
discrimination binaire employée. Et puisque chaque règle serait assignée à une
conséquence différente et que la sortie désirée est un état discret, il était alors inutile
de considérer les alternatives issues de l'activation des règles et des zones de
recouvrement entre les fonctions d'appartenance.
101
Les paramètres p et l des fonctions d'appartenance doivent être fixés de façon
appropriée en fonction des comportements de navigation, principalement ALIGNER et
ÉVITER qui sont responsables de garder l'agent proche des surfaces et loin des
obstacles. Quelques tests ont dû être réalisés pour arriver à les fixer correctement et
pour en tirer des informations utiles, principalement pour approximer les rotations
de l'agent à partir des transitions entre les formes topologiques identifiées (comme
discuté à la section 7.1.1 et exploité à la section 7.3.2). Lorsque des fonctions
d'appartenance similaires pour chacun des capteurs sont utilisées, la meilleure
condition de détection de formes survient lorsque p = 60 et l = 40. Pour des valeurs
inférieures, la séquence de formes topologiques identifiées caractérisant la
perception de l'agent au cours de son déplacement est moins riche en états, car
l'agent doit être plus proche des surfaces pour les voir. Ceci occasionne une
représentation moins précise des rotations. Pour des valeurs supérieures,
l'identification devient très sensible à des obstacles se trouvant assez loin de l'agent.
Pour des fonctions d'appartenance non symétriques entre les côtés et les directions
avant-arrière, l'identification des formes n'est pas meilleure et occasionne certaines
discontinuités lors de rotation. En effet, lorsque l'agent tourne, des formes peuvent
être détectées par la perception différente entre les axes avant-arrière et de côtés.
Ceci résulte en une diminution de stabilité dans les formes topologiques identifiées
lors des rotations.
Lorsque l'agent est en mouvement, le comportement d'identification retourne une
forme topologique à chaque cycle d'exécution. Son activation est déterminée par le
module de situation externe globale (voir section 8.1). La figure 7.3 présente un
exemple de formes topologiques identifiées lorsque l'agent tourne un coin en suivant
les contours et en passant prêt d'un obstacle rectangulaire.
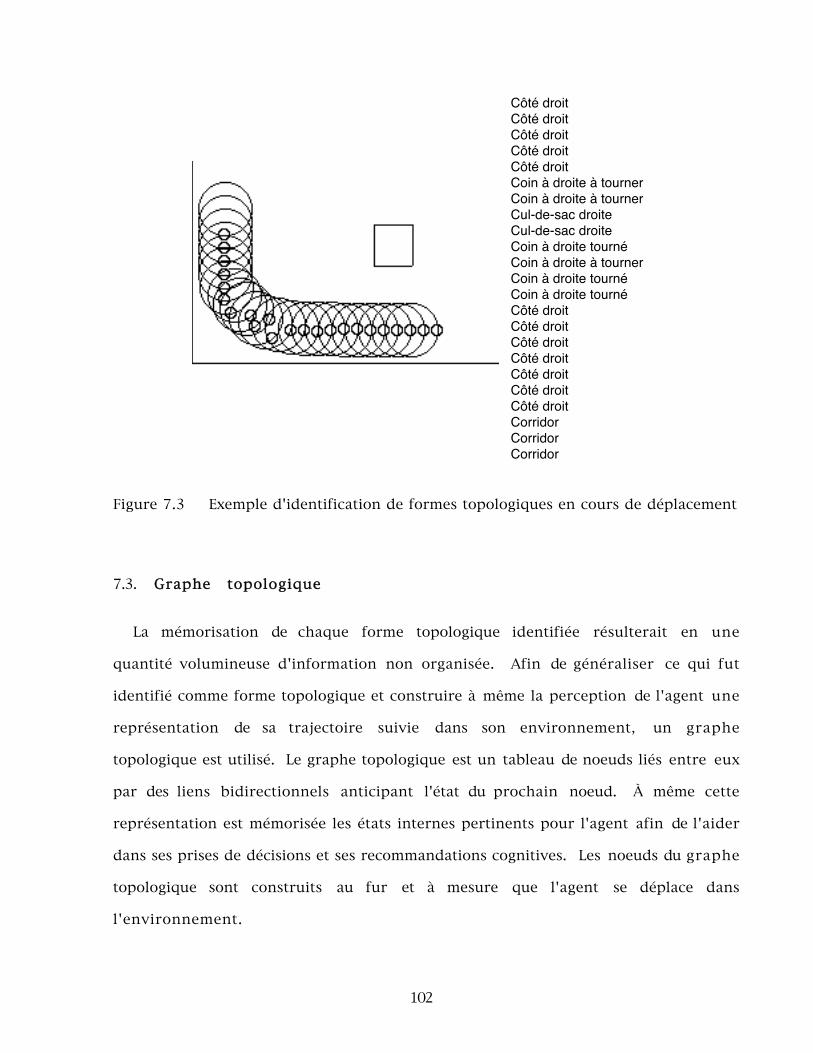
102
Côté droitCôté droitCôté droitCôté droitCôté droitCoin à droite à tournerCoin à droite à tournerCul-de-sac droiteCul-de-sac droiteCoin à droite tournéCoin à droite à tournerCoin à droite tournéCoin à droite tournéCôté droitCôté droitCôté droitCôté droitCôté droitCôté droitCôté droitCorridorCorridorCorridor
Figure 7.3 Exemple d'identification de formes topologiques en cours de déplacement
7.3. Graphe topologique
La mémorisation de chaque forme topologique identifiée résulterait en une
quantité volumineuse d'information non organisée. Afin de généraliser ce qui fut
identifié comme forme topologique et construire à même la perception de l'agent une
représentation de sa trajectoire suivie dans son environnement, un graphe
topologique est utilisé. Le graphe topologique est un tableau de noeuds liés entre eux
par des liens bidirectionnels anticipant l'état du prochain noeud. À même cette
représentation est mémorisée les états internes pertinents pour l'agent afin de l'aider
dans ses prises de décisions et ses recommandations cognitives. Les noeuds du graphe
topologique sont construits au fur et à mesure que l'agent se déplace dans
l'environnement.
103
L'algorithme de traitement du graphe topologique tente donc de regrouper
efficacement les séquences de formes topologiques. Ces séquences sont caractérisées
par des lieux topologiques, soit une forme topologique avec le nombre de cycles où
elle fut consécutivement identifiée. Deux types de séquences peuvent être observés:
des séquences de formes stables ou continues, associées à une constance dans la
trajectoire et dans sa perception (comme lors d'une trajectoire parallèle à un mur
droit); et des séquences de formes associées à des transitions perçues dans la
trajectoire (en tournant un coin par exemple). Il y a donc deux types de noeuds dans
le graphe topologique: un noeud de marque est utilisé lorsqu'un lieu topologique
corresponde à un endroit stable dans l'environnement; un noeud de transition est
construit à partir des séquences de formes topologiques non valables pour former un
noeud de marque. Pour un noeud de transition, l'analyse des lieux topologiques
permettent d'approximer la rotation effectuée par l'agent.
La graphe topologique prend la forme d'un tableau de noeuds indicé par leur
numéro. Ceci permet d'accéder directement aux noeuds à partir de leur indice, ce qui
ne pourrait être considéré si une liste chaînée était utilisée pour sa mise en oeuvre.
Les informations mémorisées dans un noeud topologique sont:
- l'état topologique, soit la forme topologique identifiée pour un noeud de marque
ou l'état inféré pour un noeud de transition;
- la longueur, soit le nombre de cycles où des formes topologiques furent utilisées
pour construire le noeud;
- l'orientation, soit l'approximation de l'orientation de l'agent par rapport à sa
trajectoire passée pour un noeud de marque, ou la rotation approximée par un
noeud de transition;
- le numéro de trajet, soit un indice pour identifier les noeuds issus d'une même
branche dans le graphe topologique;
104
- les liens avec les autres noeuds. Il y a des liens avec les noeuds précédents (type
De) et suivants (type Vers). L'anticipation de l'état topologique ainsi que
l'incertitude sur la longueur y sont mémorisées;
- le nombre de visites du noeud par l'agent;
- l'atteinte d'un but comme une cible (par variation positive du motif JOIE) ou un
point de charge (par la variable interne Chargement (voir section 5.2.6));
- l'occurrence d'un motif. Les motifs DÉTRESSE et DÉCEPTION sont mémorisées avec
leur niveau maximum d'excitation observé durant l'intervalle de construction du
noeud;
- la recommandation (favorable ou non) d'un comportement avec son degré
maximum observé durant l'intervalle de construction du noeud. Seuls les
comportements CIBLE et FOLIE sont mémorisées. La priorité est donnée à FOLIE
car c'est une condition ponctuelle déstabilisante;
- la formulation d'une recommandation cognitive particulière;
- l'activation, l'identification et la longueur d'une trajectoire planifiée.
Ces informations sont utilisées par les différentes composantes du module de
cognition. Pour l'instant, les prochaines sous-sections décrivent avec plus de détail la
structure et la construction du graphe topologique.
7.3.1. Noeuds de marque
Un noeud de marque est défini comme un lieu topologique où l'agent est capable de
percevoir une certaine stabilité dans sa position par rapport à son environnement.
Ce type de noeud sert à la synchronisation de l'agent dans son graphe topologique,
principalement pour délimiter l'occurrence de transition. Il est toutefois possible
d'avoir plusieurs noeuds de marque en séquence dans le graphe topologique. Les
conditions perceptuelles admissibles pour détecter un noeud de marque sont fonction

105
de la forme topologique et du nombre de formes consécutives identifiées, tel que le
présente le tableau 7.2.
TABLEAU 7.2 FORMES TOPOLOGIQUES POUR IDENTIFIER LES NOEUDS DE MARQUE
Forme topologique Nombre
Corridor ≥ 2
Côté gauche ≥ 3
Côté droit ≥ 3
Rien ≥ 3
Mataric [128, 129] utilise des états topologiques similaires pour désigner un
corridor et des murs de côté. Leur détection s'effectue avec l'aide d'un compas. Un
seuil définit la longueur minimale des points de repère détectables, soit l'équivalent
pour Mataric de la longueur maximale des obstacles dans l'environnement n'étant pas
des points de repère. Ici, les seuils sont fonction de la longueur des surfaces
constantes par rapport à la grosseur et la vitesse de déplacement de l'agent.
7.3.2. Noeuds de transition
Un noeud de transition est construit à partir des lieux topologiques entre deux
noeuds de marque. On suppose alors que ce qui est perçu entre des noeuds de marque
peut être utile pour caractériser les transitions dans la trajectoire de l'agent. Il ne
peut donc pas y avoir deux noeuds de transition de suite. Le traitement effectué pour
les construire consiste à analyser les formes topologiques pour en inférer un état
topologique de transition et la rotation effectuée par l'agent. Mataric [128, 129]
n'utilise pas une telle fonctionnalité car elle exploite plutôt la lecture du compas, et
regroupe de telles occurrences dans un seul état désignant des contours irréguliers
pour le noeud construit.

106
L'examen des formes topologiques s'effectue par analyse lexicale suivant les
principes de compilation [4], en utilisant des expressions régulières pour caractériser
l'angle de rotation induit de séquences de formes topologiques. Comme mentionné à la
section 4.3.2, des expressions régulières topologiques sont définies dans un fichier
externe. Suivant une notation similaire à celle utilisée en compilation [4], les
expressions régulières utilisées ici ont la structure suivante:
État Rotation = (Forme Opérateur)+ !
Les séquences de formes topologiques considérées dans les expressions régulières
sont définies à la droite du symbole '='. On y retrouve un ou plusieurs couples (ce qui
est représenté par le signe '+') composés d'une forme topologique et d'un opérateur.
Cet opérateur permet de prendre en considération le nombre de fois que la forme
topologique fut identifiée consécutivement. La description des opérateurs possibles
est donnée au tableau 7.3. La fin de l'expression régulière est désignée par le symbole
'!'
TABLEAU 7.3 OPÉRATEURS POUR LES EXPRESSIONS RÉGULIERES TOPOLOGIQUES
Lettre Description
- Une forme topologique
+ Une forme topologique ou plus
? Zéro ou une forme topologique
Les résultats associés à une expression régulière, soit l'état topologique et la
rotation induite, se trouvent à la gauche du symbole '='. Le tableau 7.4 présente les
différents états topologiques induits possibles pour les noeuds de transition à partir
des expressions régulières. Le signe de la rotation est fixé par le type l'expression
régulière telle que spécifiée par les indications dans ce tableau.

107
TABLEAU 7.4 ÉTATS TOPOLOGIQUES POSSIBLES POUR CARACTÉRISER UN NOEUD DE
TRANSITION
# Description Nom
0 Coin interne vers la droite (rotation -) Coin interne droite
1 Coin interne vers la gauche (rotation +) Coin interne gauche
2 Coin externe vers la droite (rotation +) Coin externe droite
3 Coin externe vers la gauche (rotation -) Coin externe gauche
4 Face vers un côté droit (rotation -) Face vers droite
5 Face vers un côté gauche (rotation +) Face vers gauche
6 Tourne 90˚ partant d'un côté droit (rotation -) Tourne 90 droite
7 Tourne 90˚ partant d'un côté gauche (rotation +) Tourne 90 gauche
8 Tourne 180˚ partant d'un côté droit (rotation -) Tourne 180 droite
9 Tourne 180˚ partant d'un côté gauche (rotation +) Tourne 180 gauche
10 Séquence inconnue (rotation nulle) Inconnu
Puisque les transitions dépendent des capacités d'actions de l'agent, les expressions
régulières topologiques sont influencées directement par la sélection et les règles de
contrôle des comportements, principalement ÉVITER, VITESSE, ALIGNER. Elles
dépendent aussi du comportement d'identification de formes topologiques dont les
paramètres furent ajustées pour l'établissement d'expressions régulières les plus
générales possibles. Les expressions régulières topologiques, obtenues
empiriquement par l'examen des séquences de formes topologiques identifiées lors de
transitions pour différentes conditions de rotation, sont présentées à la figure 7.4.
Pour simplifier la présentation, la variable x sert à désigner les conditions droite ou
gauche.
Coin interne x - 110 =Coin x à tourner + Cul-de-sac x + Coin x tourné - Coin x tourné - Coin x tourne - !
Coin interne x - 90 =Coin x à tourner + Cul-de-sac x + Coin x tourné - Coin x tourné ? !
Coin interne x - 90 =Coin x à tourner + Coin x tourné - Coin x à tourner - Cul-de-sac x + Coin x tourné + !

108
Coin interne x - 80 = Coin x à tourner + Coin x tourné + Coin x à tourner + !Coin interne x - 50 = Coin x à tourner + Côté x - Coin x à tourner + !
Coin externe x - 110 = Rien - Côté x + Rien + !Coin externe x - 100 = Rien - Côté x - Rien - !Coin externe x - 90 = Rien - Côté x - !
Face vers x - 90 = Face + Côté x + !Face vers x - 90 = Face + Corridor - Côté x + !Face vers x - 45 = Face - Côté x - !
Tourne 180 x - 180 = Coin x tourné - Accoté à un mur - Coin x tourné - !
Tourne 90 x - 90 = Coin x tourné - Accoté à un mur + !
Figure 7.4 Expressions régulières topologiques
Certaines de ces expressions régulières se distinguent seulement par la
considération de plus de formes topologiques, reflétant une rotation plus accentuée de
l'agent. c'est le cas par exemple des expressions Coin interne x - 110 et Coin interne x
- 90, ainsi que toutes les expressions régulières de type Coin externe. On peut aussi
s'imaginer la trajectoire empruntée par l'agent lors de certaines transitions en
consultant les expressions régulières pour Tourne 180 x et Tourne 90 x. La
formulation linguistique des formes topologiques identifiées lors de transition facilite
de beaucoup la compréhension des expressions régulières topologiques ainsi que leur
conception.
Lors du traitement, les expressions régulières sont examinées par un analyseur
lexical. Pour chaque forme topologique identifiée durant une période de transition,
l'analyseur lexical examine chacune des expressions régulières actives pour vérifier
si la forme correspond à celle définie dans l'expression régulière à sa présente
position d'évaluation. Si ce n'est pas le cas, l'expression régulière est éliminée et ne
peut être évaluée lors de prochaines analyses pour le même noeud de transition.
L'évaluation des expressions régulières se fait donc de façon incrémentale et
parallèle. Dès qu'une expression régulière est complètement observée, l'état
109
topologique associé est mémorisé si le niveau de priorité de l'expression régulière est
supérieur à celui d'un résultat déjà mémorisé s'il y a lieu. Les priorités sont définies
selon l'ordre de présentation des expressions régulières dans le fichier de définition.
Si aucune expression régulière n'est complétée à la fin de la transition, celle qui est la
plus prêt de l'être (et en respectant leur priorité) est choisie par défaut. Si aucune
expression régulière n'est vérifiée durant la période de construction du noeud de
transition, la rotation résultante est 0 et l'état du premier lieu topologique est utilisé
pour caractériser le noeud de transition (pour aider le positionnement éventuel avec
les noeuds de marque très petites selon les limites du tableau 7.2). Cette opération est
valide si elle n'entraîne pas la création invalide d'une noeud de marque. Sinon, l'état
Inconnu est utilisé.
Enfin, le mécanisme d'analyse lexicale topologique affiche certaines similitudes
avec l'approche de Brooks [38]. Chaque expression régulière peut être perçue comme
un comportement qui réagit à des formes topologiques. Ces "comportements" lexicaux
sont évalués en parallèle et leurs résultats suivent un mécanisme de priorité
exclusive en sortie. Ceci permet de respecter l'hypothèse d'émergence au niveau des
noeuds de transition créés.
7.3.3. Description des liens
Les noeud sont inter-reliés entre eux par des liens bidirectionnels permettant
d'accéder aux noeuds voisins précédents (par les liens de type De) et suivants (par les
liens de type Vers). Dans la mise en oeuvre actuelle, un noeud a à sa disposition un
maximum de quatre liens dans chacune de ces directions.
Deux paramètres importants sont associés à un lien. Le premier est l'anticipation
de l'état topologique du noeud lié. Cette anticipation permet au graphe topologique
d'être réversible, soit d'être parcouru en sens inverse des trajectoires mémorisées
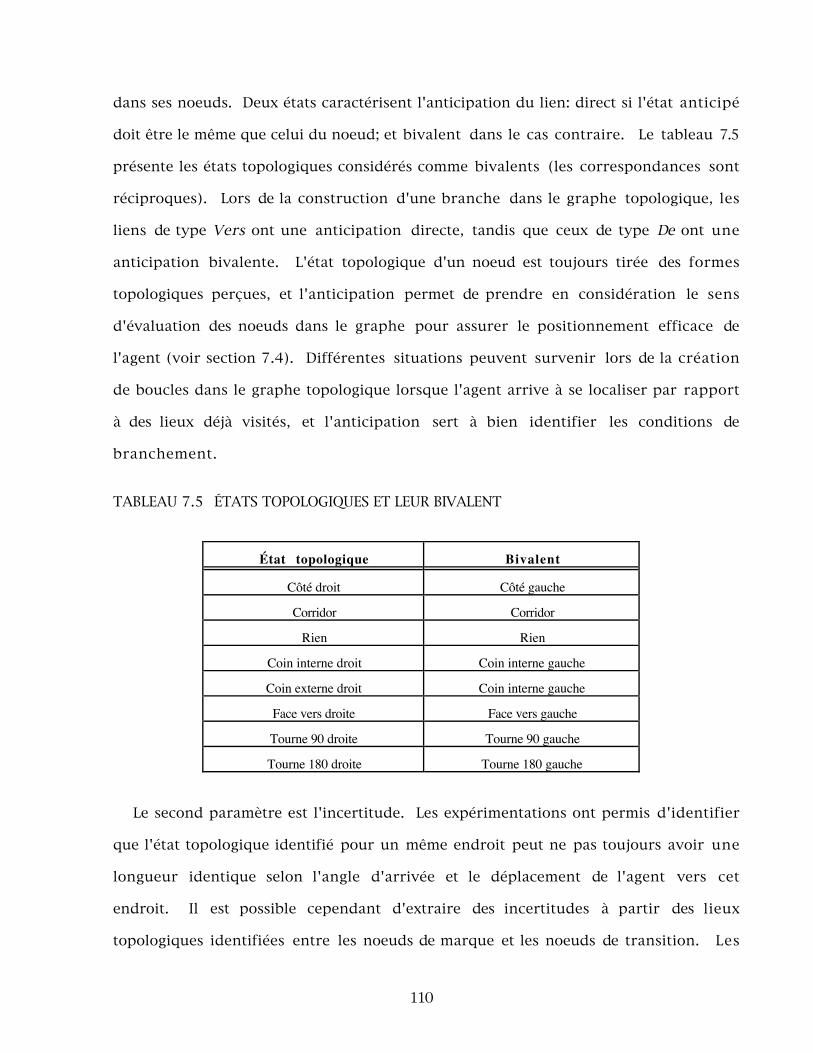
110
dans ses noeuds. Deux états caractérisent l'anticipation du lien: direct si l'état anticipé
doit être le même que celui du noeud; et bivalent dans le cas contraire. Le tableau 7.5
présente les états topologiques considérés comme bivalents (les correspondances sont
réciproques). Lors de la construction d'une branche dans le graphe topologique, les
liens de type Vers ont une anticipation directe, tandis que ceux de type De ont une
anticipation bivalente. L'état topologique d'un noeud est toujours tirée des formes
topologiques perçues, et l'anticipation permet de prendre en considération le sens
d'évaluation des noeuds dans le graphe pour assurer le positionnement efficace de
l'agent (voir section 7.4). Différentes situations peuvent survenir lors de la création
de boucles dans le graphe topologique lorsque l'agent arrive à se localiser par rapport
à des lieux déjà visités, et l'anticipation sert à bien identifier les conditions de
branchement.
TABLEAU 7.5 ÉTATS TOPOLOGIQUES ET LEUR BIVALENT
État topologique Bivalent
Côté droit Côté gauche
Corridor Corridor
Rien Rien
Coin interne droit Coin interne gauche
Coin externe droit Coin interne gauche
Face vers droite Face vers gauche
Tourne 90 droite Tourne 90 gauche
Tourne 180 droite Tourne 180 gauche
Le second paramètre est l'incertitude. Les expérimentations ont permis d'identifier
que l'état topologique identifié pour un même endroit peut ne pas toujours avoir une
longueur identique selon l'angle d'arrivée et le déplacement de l'agent vers cet
endroit. Il est possible cependant d'extraire des incertitudes à partir des lieux
topologiques identifiées entre les noeuds de marque et les noeuds de transition. Les

111
séquences de lieux topologiques présentées au tableau 7.6 permettent d'initialiser
l'incertitude des liens entre les noeuds de marque et les noeuds de transition (du
noeud A vers le noeud B). L'incertitude considérée correspond au nombre de cycles
associés au lieu topologique de ce tableau ne pouvant être un noeud de marque. Dans
les autres cas où aucune incertitude ne peut être établie, l'incertitude est considérée
comme unitaire. Les incertitude utilisées sont alors déterminées en fonction de ce qui
est perçu des interactions de l'agent avec l'environnement, ce qui préserve
l'hypothèse d'émergence dans l'architecture de contrôle proposée. Les mesures
d'incertitudes aident le positionnement de l'agent par rapport aux endroits mémorisés
dans le graphe topologique.
TABLEAU 7.6 SÉQUENCES DE LIEUX TOPOLOGIQUES POUR L'INCERTITUDE
Lieu topologique à la fin d'un
noeud A
Lieu topologique au début d'un
noeud B
Côté x Coin x à tourner
Coin x tourné Côté x
7.3.4. Noeuds tampons
Le graphe topologique est formé d'un nombre limité de noeuds. Lorsqu'un
nouveau noeud doit être choisi et que le graphe topologique est initialement vide,
l'indice est choisi en ordre chronologique jusqu'à ce que la limite supérieure du
tableau est atteinte. Ceci permet de mieux suivre la séquence de noeuds construits lors
de la trajectoire de l'agent. Ensuite, l'indice du dernier noeud éliminé si disponible ou
celui du premier noeud libre en partant de l'origine du tableau est sélectionné.
Mais lorsque le graphe topologique est plein ou que l'agent désire exploiter son
graphe sans construire de nouveaux noeuds (tel que dicté par le motif EXPLOITER),
l'agent doit quand même arriver à s'y localiser. Pour y arriver, trois noeuds tampons
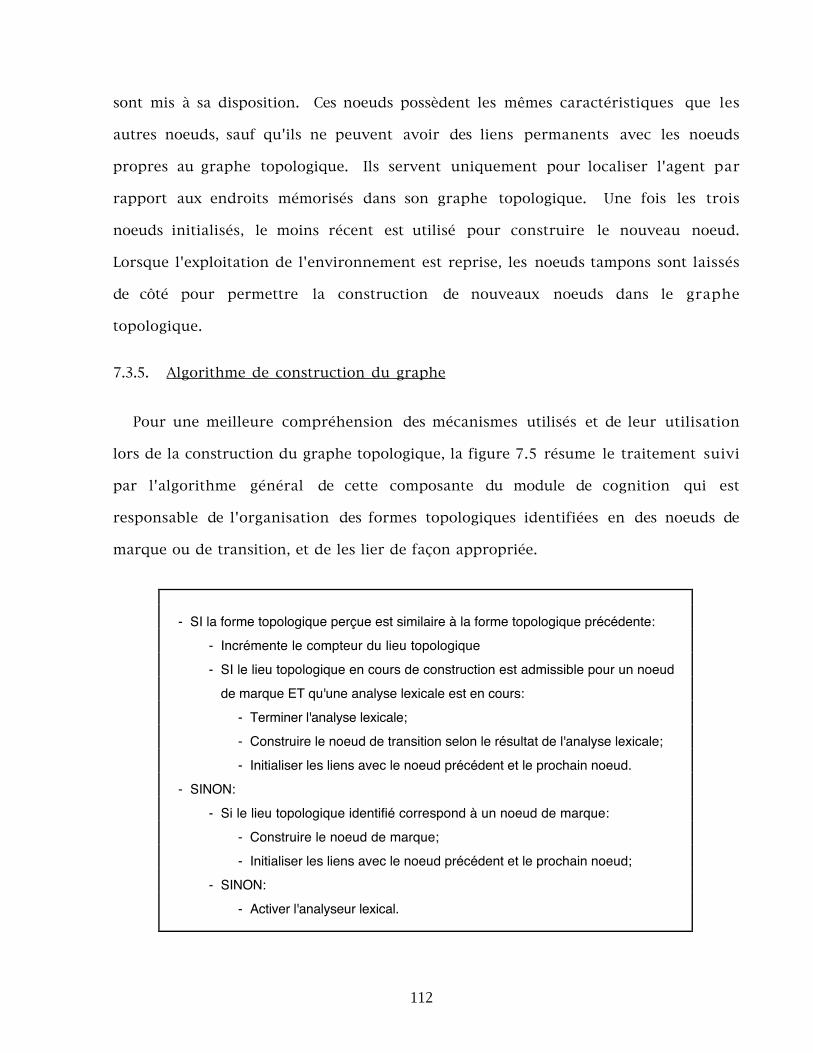
112
sont mis à sa disposition. Ces noeuds possèdent les mêmes caractéristiques que les
autres noeuds, sauf qu'ils ne peuvent avoir des liens permanents avec les noeuds
propres au graphe topologique. Ils servent uniquement pour localiser l'agent par
rapport aux endroits mémorisés dans son graphe topologique. Une fois les trois
noeuds initialisés, le moins récent est utilisé pour construire le nouveau noeud.
Lorsque l'exploitation de l'environnement est reprise, les noeuds tampons sont laissés
de côté pour permettre la construction de nouveaux noeuds dans le graphe
topologique.
7.3.5. Algorithme de construction du graphe
Pour une meilleure compréhension des mécanismes utilisés et de leur utilisation
lors de la construction du graphe topologique, la figure 7.5 résume le traitement suivi
par l'algorithme général de cette composante du module de cognition qui est
responsable de l'organisation des formes topologiques identifiées en des noeuds de
marque ou de transition, et de les lier de façon appropriée.
- SI la forme topologique perçue est similaire à la forme topologique précédente:- Incrémente le compteur du lieu topologique- SI le lieu topologique en cours de construction est admissible pour un noeud
de marque ET qu'une analyse lexicale est en cours:- Terminer l'analyse lexicale;- Construire le noeud de transition selon le résultat de l'analyse lexicale;- Initialiser les liens avec le noeud précédent et le prochain noeud.
- SINON:- Si le lieu topologique identifié correspond à un noeud de marque:
- Construire le noeud de marque;- Initialiser les liens avec le noeud précédent et le prochain noeud;
- SINON:- Activer l'analyseur lexical.

113
Figure 7.5 Étapes pour la construction du graphe topologique
La figure 7.6 présente le graphe topologique résultant des formes topologiques
perçues de la figure 7.3. Les noeuds sont identifiés par leur état topologique, leur
longueur et leur orientation. Il est possible d'y remarquer trois noeuds de marque et
un noeud de transition. Le noeud de transition est obtenu par analyse lexicale selon
la deuxième expression régulière de la figure 7.4 identifiant une rotation interne de
90°. L'orientation initiale considérée est de 0°. Les liens pleins sont de type Vers et
les liens en pointillé sont de type De. L'anticipation est représentée sur ces liens avec
l'incertitude. L'anticipation directe est représentée par l'indice D, tandis que
l'anticipation bivalente est représentée par l'indice B. Les incertitudes de valeurs 2
viennent des conditions spécifiées au tableau 7.6. Enfin, le noeud vide correspond au
noeud en construction.
Côté droitCôté droitCôté droitCôté droitCôté droitCoin à droite à tournerCoin à droite à tournerCul-de-sac droiteCul-de-sac droiteCoin à droite tournéCoin à droite à tournerCoin à droite tournéCoin à droite tournéCôté droitCôté droitCôté droitCôté droitCôté droitCôté droitCôté droitCorridorCorridorCorridor
Côté droit5, 0°
Coin interne
droit8, -90°
Corridor3, -90°
Côté droit
7,-90°
D,2B,1
D,2
B,1
DD,1
B,1
Figure 7.6 Exemple de graphe topologique
114
7.4. Positionnement dans le graphe topologique
Pour que le graphe topologique soit utile, il doit lui être possible d'indiquer quand
l'agent se trouve à des endroits déjà visités et mémorisés dans le graphe. Pour y
arriver, Mataric [128, 129] considère l'état topologique, l'orientation donnée par le
compas, la longueur approximative et un estimé de position (x, y). Cet estimé est
construit selon le vecteur d'orientation obtenu du compas et en supposant un
déplacement à vitesse constante. Lorsqu'un point de repère est détecté, ces
paramètres sont comparés à tous les noeuds du graphe et une correspondance peut ou
non être établie avec un seul noeud. Si la position dans le graphe est connue lors de
cette détection, le noeud de position propage son espérance aux noeuds voisins selon
le sens de déplacement dans le graphe pour servir d'indice contextuel et faciliter la
correspondance. La combinaison de l'espérance et de l'estimé de position assure une
distinction unique des points de repère. Mataric considère enfin les noeuds comme
des comportements qui travaillent en parallèle et desquels émergent une
représentation.
L'algorithme de positionnement utilisé par le module de cognition diffère de
l'approche de Mataric. Tout d'abord, aucun estimé de position n'est utilisé pour la
localisation dans le graphe topologique. L'utilisation d'un estimé de position est une
condition très stricte affectée par les erreurs passées, et elle manque de réalisme par
rapport au raisonnement qualitatif sur la topologie de l'environnement.
L'algorithme considère plutôt la similitude sur une séquence de trois noeuds
consécutifs. Trois noeuds s'avèrent un bon compromis entre l'horizon de localisation
et la complexité de la recherche et du traitement pour le positionnement. I ls
viennent définir le contexte cognitif de traitement. La similitude est établie en
fonction de leur état, leur anticipation, leur longueur et parfois de leur orientation.
L'orientation est un critère à utiliser avec précaution ici car elle est sujette aux

115
imprécisions et aux limitations propres à l'utilisation d'une analyse lexicale
topologique pour la déterminer. Ainsi, une erreur d'approximation risque aussi de se
propager dans les noeuds subséquentes du graphe, rendant difficile de
resynchroniser le positionnement dans le graphe. L'orientation peut toutefois
s'avérer utile pour la discrimination de séquences de noeuds identiques de par une
reproduction de séquences pour des endroits toutefois différents de l'environnement.
L'orientation est donc utilisée sous certaines conditions.
De cette façon, la considération de similitudes sur une séquence de noeuds tente de
trouver une position unique dans le graphe sans utiliser un estimé de position.
Toutefois, l'unicité des noeuds par rapport à un endroit dans l'environnement n'est
plus conservée. Une attention particulière fut portée sur ces possibilité pour tenter
d'en limiter les inconvénients. Enfin, une dernière différence avec Mataric est que
les noeuds ne sont pas considérés comme des comportements, et le positionnement
s'effectue par une recherche séquentielle en fonction des conditions propres aux
trois derniers noeuds traités par le module de cognition. Ces trois derniers noeuds
caractérisent ce qui fut récemment perçu par l'agent (analogue à sa mémoire à court
terme), et trois situations peuvent être considérées de ces noeuds:
- l'agent ne sait pas où il se trouve par rapport à une trajectoire passée. Les trois
derniers noeuds sont alors tous des nouveaux noeuds avec un seul lien entre eux,
et il faut alors rechercher dans tout le graphe topologique une séquence de
noeuds qui leur sont similaires;
- l'agent sait où il se trouve par rapport à sa trajectoire passée. Le noeud le plus
récent est nouvellement construit, et le noeud précédent est lié à plusieurs
noeuds. Il est alors possible de vérifier la similitude du noeud récent avec les
noeuds liés au noeud précédent;
- l'agent sait approximativement où il se trouve par rapport à sa trajectoire passée.
Les deux noeuds les plus récents sont nouveaux, et il est encore possible de se
116
servir du troisième noeud pour localiser la recherche dans le graphe
topologique.
Ces trois situations se succèdent en fonction des similitudes établies. Tout d'abord,
lorsqu'une séquence de noeuds similaires est trouvée après une recherche dans tout
le graphe, les noeuds récents sont éliminés en prenant soin de compléter la boucle
dans le graphe et de remonter le plus loin possible pour éliminer les noeuds
similaires précédent la séquence. L'agent se trouve alors à être situé par rapport à
une trajectoire passée, et il est alors possible de comparer les nouveaux noeuds
construits avec les noeuds à cette position dans le graphe topologique. Ceci se répète
jusqu'à ce qu'une divergence se manifeste. Une nouvelle branche est alors initialisée
dans le graphe. Ensuite, si le nouveau noeud ne peut arriver à être localisé dans le
graphe, alors l'agent perd sa référence par rapport à une trajectoire passée et la
recherche sur tous les noeuds du graphe doit alors être reprise. Lors de l'élimination
de noeuds, les informations pertinentes comme les buts, les motifs, les
recommandations de comportements et les recommandations cognitives sont
préservées (s'ils existent et s'ils sont jugées utiles). L'anticipation et l'incertitude
pour les nouveaux liens sont aussi initialisées correctement. Enfin, le nombre de
visite des noeuds similaires trouvés est incrémenté après l'élimination des noeuds
récents associés. Les prochaines sous-sections décrivent le traitement réalisé pour
chacune de ces trois situations, suivi de l'influence de cette composante du module de
cognition sur les motifs de l'agent.
7.4.1. Positionnement lorsque l'agent ne sait pas où il se trouve par rapport à une
trajectoire passée
Cette condition survient lorsque l'agent s'engage dans un nouveau milieu ou qu'il
n'arrive plus à se situer par rapport à une trajectoire préalablement mémorisée. La
séquence de noeuds topologiques construits suit alors la forme d'une branche unique
117
identifiée par un numéro de trajet, jusqu'à ce qu'une séquence de trois noeuds
similaires soit trouvée.
Pour pouvoir se situer par rapport à une trajectoire passée, une recherche sur tous
les noeuds initialisés du graphe est effectuée, tentant d'identifier une séquence de
trois noeuds consécutifs présentant des similitudes avec les trois noeuds récemment
construits. Étant donné que cette recherche peut demander un temps de calcul
important selon la grosseur du graphe topologique, elle doit donc être réalisée
seulement qu'en temps opportun. En premier lieu, une recherche est permise
seulement lorsqu'un nouveau noeud est construit, et que la séquence des trois noeuds
les plus récents soit formée d'au moins deux noeuds de marque. Cette dernière
contrainte assure une meilleure stabilité des similitudes détectées. Un troisième
critère permet la recherche lorsque l'agent croit avoir réalisé un déplacement rotatif
couvrant 360°. L'agent doit nécessairement effectuer une telle rotation avant de
pouvoir croire qu'il se trouve à des endroits déjà visités. Ceci permet de limiter les
difficultés entourant des séquences de noeuds similaires qui représentent des endroits
différents de l'environnement. Lorsqu'il existe des boucles dans le graphe
topologique, cette condition n'est requise que pour évaluer les similitudes avec les
noeuds d'une même branche. Il reste cependant que cette condition est aussi sujette
aux limitations dans l'approximation de l'orientation par analyse lexicale topologique.
Si ces conditions sont vérifiées, la recherche débute en cherchant une similitude
entre le noeud le plus récent et les autres noeuds du graphe. La similitude entre deux
noeuds est évaluée à partir de l'état, la longueur (en considérant une incertitude de 1
par noeud pour que l'évaluation soit plus sévère) et la rotation pour les noeuds de
transition. Lorsqu'une telle similitude est établie, une fonction réentrante examine
les autres similitudes possibles en partant du noeud similaire trouvé, avec les deux
autres noeuds récents. L'anticipation des liens est alors considérée. L'anticipation

118
sur les liens indique ce à quoi on doit s'attendre comme similitude d'états en fonction
du sens de propagation dans le graphe. Quatre conditions sont considérées comme
acceptables:
- si la similitude précédente est directe, que la recherche s'effectue par le lien de
type De, et que ce lien anticipe le bivalent de l'état pour le noeud lié, alors la
similitude entre les deux noeuds évalués doit être directe. Ici, la séquence en
cours d'identification est vérifiée dans le sens où elle fut construite;
- si la similitude précédente est bivalente, que la recherche s'effectue par le lien
de type Vers, et que ce lien anticipe l'état direct pour le noeud lié, alors la
similitude entre les deux noeuds évalués doit être bivalente. Ici, la séquence en
cours d'identification est parcourue en sens inverse de sa construction;
- si la similitude précédente est directe, que la recherche s'effectue par le lien de
type De, et que ce lien anticipe une correspondance directe avec le noeud lié,
alors la similitude entre les deux noeuds évalués doit être directe. Cette condition
survient à l'entrée d'une séquence construite par le branchement à des noeuds
qui sont parcourus en sens inverse de leur construction;
- si la similitude précédente est bivalente, que la recherche s'effectue par le lien
de type Vers, et que ce lien anticipe le bivalent de l'état pour le noeud lié, alors la
similitude entre les deux noeuds évalués doit être bivalente. Cette condition
survient à la sortie d'une séquence construite par le branchement à des noeuds
qui sont parcourus en sens inverse de leur construction.
Les autres cas sont automatiquement rejetés. Le sens des liens empruntés lors de la
construction des séquences est le même sur toute la séquence. Cette restriction limite
l'occurrence de conditions complexes d'analyse, et facilite la resynchronisation des
états dans le graphe topologique lors d'un branchement.
119
Si une séquence de noeuds similaires aux noeuds récents est trouvée, alors
certaines conditions d'invalidité sont vérifiées. Ces conditions sont:
- noeud trouvé faisant parti des noeuds récents;
- le noeud précédent les trois noeuds récents fait parti des noeuds trouvés, ou i l
sert d'intermédiaire entre les deux séquences mais n'est pas caractérisé par une
rotation de 180° ou par l'utilisation du comportement FOLIE (ce qui justifie
pourquoi le noeud sert de jonction);
- un noeud d'état Tourne-x-90 fut mémorisé dans le premier noeud trouvé. Cette
condition est utile pour éviter les similitudes possibles entre les noeuds
caractérisant le départ de l'agent pour l'exploration (voir section 7.7.1);
- la différence de l'orientation est inférieure à un seuil variable, pour les noeuds
de marque identifiés comme étant similaires aux noeuds récents et faisant partis
de la même branche. Ce seuil est variable pour pallier aux erreurs potentielles
dans l'approximation de la rotation de l'agent. Il est fixé au départ à 45° et est
augmenté de 5° pour chaque noeud de transition construit dans cette branche du
graphe, jusqu'à un maximum de 75°. Ceci permet d'adapter le seuil en fonction
de ce qui émerge comme type de noeuds pouvant causer des erreurs
d'orientation. L'orientation n'est toutefois plus considérée après le rejet de trois
séquences consécutives à cause de l'orientation des noeuds de marque.
Si toutes ces conditions sont rencontrées, alors la séquence de noeuds est acceptée.
Mais pour pouvoir se localiser avec une certaine assurance dans le graphe
topologique, il doit exister qu'une seule de ces séquences. Dans ce cas, il est alors
possible d'éliminer les noeuds récents et créer un branchement avec les noeuds
similaires trouvés. La figure 7.7 illustre cette étape. Le symbole 'X' représente ce qui
est éliminé, et les nouveaux liens créés sont représentés en gras. Si les noeuds
demandant de nouveaux liens utilisent déjà leur quatre liens, alors le branchement
dans le graphe topologique ne peut avoir lieu. Si ce n'est pas le cas, l'orientation pour

120
les prochains noeuds de marque est alors resynchronisée à celle de la séquence
trouvée (selon le type de lien et leur anticipation d'états). Les conditions pour
détecter le déplacement rotatif sur 360° sont aussi réinitialisées. Si les noeuds récents
sont des noeuds tampons, alors ils sont éliminés comme les autres, mais un lien
temporaire est initialisé avec le noeud tampon choisi pour le noeud en construction
afin de localiser l'agent dans son graphe topologique.
Noeuds récents
[2] [1] [0]
Séquence similaire
[2] [1] [0]
Noeud enconstruction
X
XXX
Figure 7.7 Schéma de branchement lorsqu'une séquence de trois noeuds similaires
est identifiée
Il est ensuite nécessaire d'examiner s'il est possible de remonter en amont de la
séquence trouvée afin de vérifier l'existence de d'autres similitudes. Ceci permet
d'éliminer des noeuds similaires qui furent rejetés à cause des conditions de rejet
précédentes. L'anticipation des liens est encore considérée pour évaluer la similitude,
mais plus l'orientation. L'incertitude des liens est alors considérée comme critère
supplémentaire pour la longueur. De plus, un nouveau critère considère le but des
noeuds pour établir une similitude dans le cas où le critère de longueur n'est pas
respectée. La figure 7.8 représente le schéma de rebranchement mis en oeuvre dans
une telle situation. Les noeuds identifiés par le symbole '*' sont les noeuds similaires
trouvés. Ce processus est répété tant qu'une seule similitude peut être établie, que des

121
liens existent pour réaliser le branchement, ou qu'une jonction est observée sur la
branche des noeuds les plus récents.
Nouveaux noeuds récents
[2] [1] [0]
Noeud enconstruction
X
X
X
*
*
Figure 7.8 Schéma de branchement lorsqu'il est possible de remonter dans le
graphe topologique
Enfin, si aucune séquence similaire ne fut acceptée, une dernière condition est
examinée. Si le noeud le plus récent est similaire par bivalence au troisième noeud le
plus récent, et que le noeud entre les deux est un noeud de transition d'état Tourne x
180, alors le noeud le plus récent est éliminé est des liens sont initialisés comme le
montre la figure 7.9.
Noeuds récents
[2] [1] [0]
Noeud enconstruction
X
X
Figure 7.9 Schéma de branchement pour une rotation de 180° valide
7.4.2. Positionnement lorsque l'agent sait où il se trouve par rapport à une
trajectoire passée
Cette situation survient lorsque seul le noeud le plus récent fut nouvellement
construit. Il convient donc de vérifier si une similitude existe avec un des autres

122
noeuds liés au deuxième noeud le plus récent (soit celui identifié par '[1]'). Cette
situation est illustrée à la figure 7.10. La similitude est évaluée selon l'état
topologique des noeuds, leur longueur, la rotation pour les noeuds de transition,
l'incertitude et l'anticipation. La similitude entre les états doit être la même que celle
dictée par l'anticipation du lien. Une similitude au niveau des buts du noeud
compense aussi une divergence au niveau du critère de la longueur si c'est
nécessaire. La recherche s'effectue dans le même sens que les liens entre le noeuds
récent '[2]' et le noeud récent '[1]'. Si une seule similitude existe, le noeud le plus
récent est éliminé et il est remplacé par le noeud similaire trouvé, dans la mesure où
un nouveau lien peut être ajouté pour le noeud similaire trouvé.
Noeuds récents
[2] [1] [0]
Noeud enconstruction
X
X
*
Figure 7.10 Schéma de branchement lorsque le plus récent noeud est similaire à un
noeud déjà visité, selon la position actuelle dans le graphe topologique
Le même processus de recherche s'applique si le noeud le plus récent est un noeud
tampon. Par contre, au lieu de laisser se former une nouvelle branche dans le
graphe, le lien temporaire entre le noeud récent '[1]' et le noeud tampon '[0]' est
détruit. La recherche dans le graphe est reprise une fois les trois noeuds tampons
réinitialisé. Ce choix rend plus difficile la localisation de l'agent lorsqu'il exploite son
graphe topologique, mais simplifie le traitement que nécessiterait la détection de
similitude avec un noeud tampon intermédiaire.
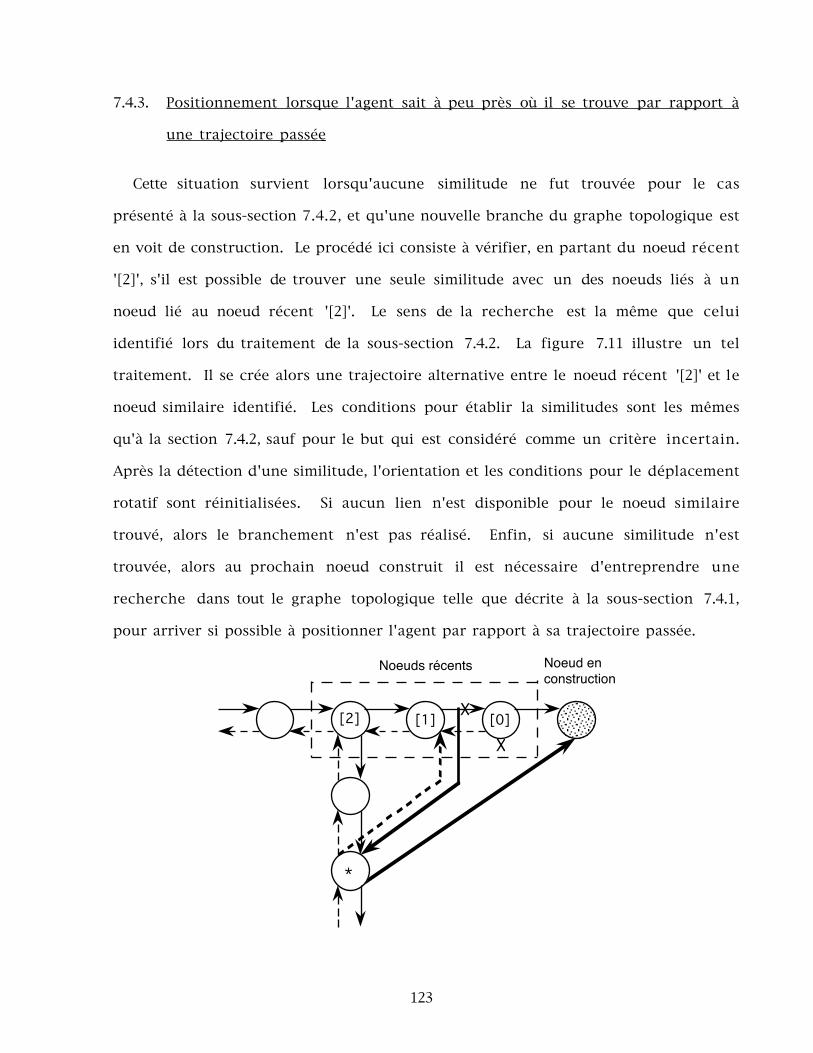
123
7.4.3. Positionnement lorsque l'agent sait à peu près où il se trouve par rapport à
une trajectoire passée
Cette situation survient lorsqu'aucune similitude ne fut trouvée pour le cas
présenté à la sous-section 7.4.2, et qu'une nouvelle branche du graphe topologique est
en voit de construction. Le procédé ici consiste à vérifier, en partant du noeud récent
'[2]', s'il est possible de trouver une seule similitude avec un des noeuds liés à un
noeud lié au noeud récent '[2]'. Le sens de la recherche est la même que celui
identifié lors du traitement de la sous-section 7.4.2. La figure 7.11 illustre un tel
traitement. Il se crée alors une trajectoire alternative entre le noeud récent '[2]' et le
noeud similaire identifié. Les conditions pour établir la similitudes sont les mêmes
qu'à la section 7.4.2, sauf pour le but qui est considéré comme un critère incertain.
Après la détection d'une similitude, l'orientation et les conditions pour le déplacement
rotatif sont réinitialisées. Si aucun lien n'est disponible pour le noeud similaire
trouvé, alors le branchement n'est pas réalisé. Enfin, si aucune similitude n'est
trouvée, alors au prochain noeud construit il est nécessaire d'entreprendre une
recherche dans tout le graphe topologique telle que décrite à la sous-section 7.4.1,
pour arriver si possible à positionner l'agent par rapport à sa trajectoire passée.
Noeuds récents
[2] [1] [0]
Noeud enconstruction
X
X
*

124
Figure 7.11 Schéma de branchement lorsqu'il est possible de se rebrancher dans le
graphe topologique après un noeud intermédiaire
Une dernière condition est considérée ici lorsqu'une similitude est détectée.
Lorsque la similitude s'effectue à un branchement du graphe topologique, il est
possible que le noeud intermédiaire soit similaire à un des noeuds qui précède cette
jonction. Cette recherche s'effectue dans le sens inverse de celui utilisé pour établir
ce branchement. Si une seule séquence existe selon l'état topologique, la longueur et
les incertitudes, la rotation pour les noeuds de marque et l'anticipation, alors le noeud
récent '[1]' est éliminé. Bien sûr, il faut qu'un lien de type De soit disponible entre le
noeud '*' et le noeud '[2]' pour que cette étape se réalise. Pour mieux comprendre, la
figure 7.12 illustre la situation en question.
* [0]
X
[2]
[1]
X
X
Figure 7.12 Schéma de branchement lorsqu'il est possible de remonter pour
éliminer le noeud intermédiaire
7.4.4. Exemple de positionnement
De nombreux tests furent réalisés pour valider le fonctionnement de ces
mécanismes dans diverses situations. Un exemple de résultat impliquant la
construction d'un graphe topologique et le positionnement par rapport à une
trajectoire passée est présenté à la figure 7.14. La trajectoire empruntée par l'agent
au cours de la construction de ce graphe topologique est illustrée à la figure 7.13.
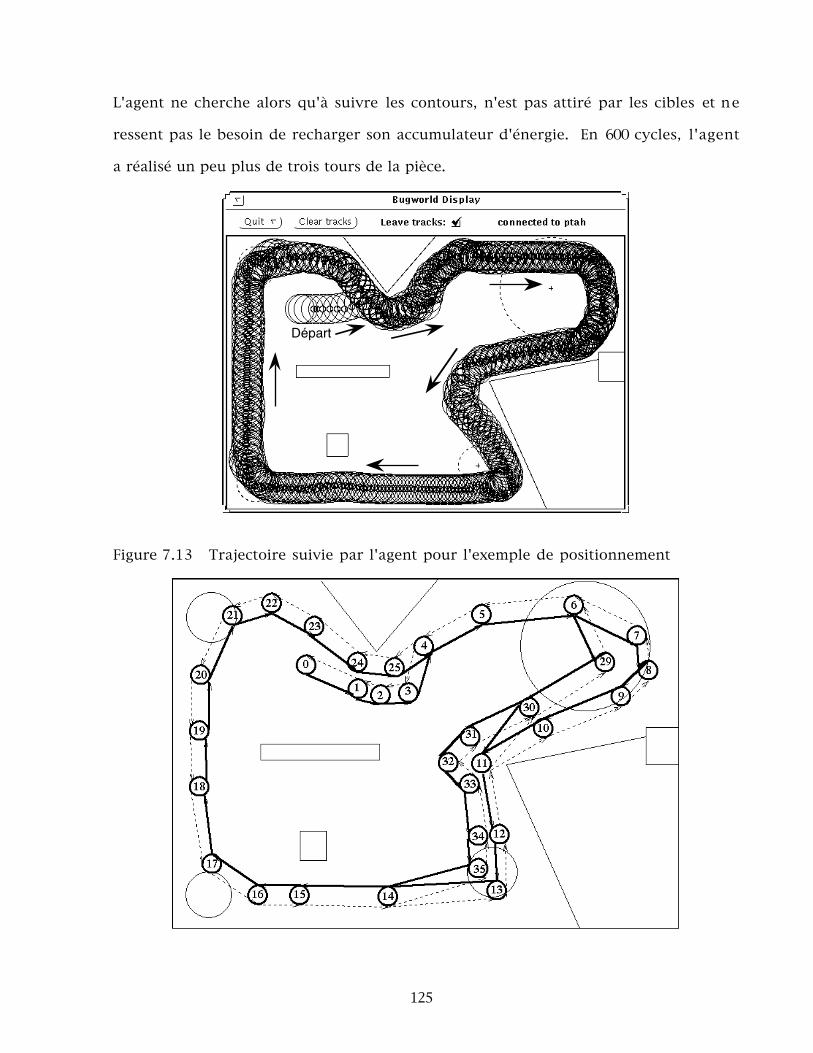
125
L'agent ne cherche alors qu'à suivre les contours, n'est pas attiré par les cibles et ne
ressent pas le besoin de recharger son accumulateur d'énergie. En 600 cycles, l'agent
a réalisé un peu plus de trois tours de la pièce.
Départ
Figure 7.13 Trajectoire suivie par l'agent pour l'exemple de positionnement
126
Figure 7.14 Graphe topologique résultant pour l'exemple de positionnement
Avec cette représentation du graphe topologique, les noeuds sont représentés sous
forme de cercle avec leur numéro, et ils sont positionnés sur une réplique de
l'environnement utilisé. La position des cercles est déterminée en calculant la
moyenne entre les coordonnées initiales et finales enregistrées lors de la
construction du noeud. Ces coordonnées ne sont utilisées que pour la représentation
graphique des noeuds, et non pour le positionnement dans le graphe topologique de
l'agent. Pour la figure 7.14, certains noeuds qui étaient superposés l'un sur l'autre (à
cause qu'ils n'ont être considérés comme étant similaires) furent redisposés pour
mieux percevoir les connexions entre les branches du graphe. Les liens en gras sont
des liens de type Vers tandis que les liens de type De sont de grosseur normale. Enfin,
les liens en trait plein ont une anticipation directe, tandis que les liens pointillés ont
une anticipation bivalente.
De la figure 7.14, il est possible de remarquer qu'après le premier tour, une
similitude fut décelée permettant de se brancher au noeud 4. L'erreur fut de 20° sur
l'orientation. La recherche dans tout le graphe débuta au noeud 21, soit qu'après que
l'agent ait cru avoir complété un déplacement sur 360°. Par contre, une divergence
s'est manifestée au noeud 29, l'agent n'ayant pu bien détecter le côté vertical
supérieur droit comme un point de marque. Le noeud 29 est alors un noeud de
transition de longueur 20 initialisé par défaut en un Coin interne gauche de 90°. La
rotation totale de l'agent sur cette période était toutefois de 180°. De plus, le coin
externe droit fut abordé en étant un peu plus éloigné de la surface, ce qui permit le
rebranchement dans le graphe seulement qu'au noeud 14. Lors du troisième tour, la
similitude est préservée jusqu'au noeud 30, et une nouvelle branche est initialisée. Le
rebranchement s'effectue à partir d'une similitude établie des noeuds 12 à 14, et après
avoir remonté d'un noeud suite à cette similitude, un chemin est établi du noeud 30 au

127
noeud 11. Il est donc possible de constater que malgré les limitations lors de
l'approximation de la rotation, l'agent arrive à se localiser efficacement dans le
graphe tout en produisant de nouvelles connexions entre les trajets mettant en
évidence des alternatives. La trajectoire se termine au noeud 29. Sur un total de 72
noeuds construits, 33 noeuds mémorisant 247 cycles furent préservés dans le graphe
suite au positionnement.
7.4.5. Variation du motif CONFIANCE en fonction du positionnement
Comme mentionné à la sous-section 6.4, le motif CONFIANCE est influencé par la
capacité de l'agent de se positionner dans son graphe topologique par rapport à ses
trajectoires mémorisées. Ainsi, plus il est en mesure d'y arriver, plus il se sent en
confiance dans son environnement et il peut alors agir en conséquence. Cette
influence se manifeste à deux fréquences, soit au rythme de création des nouveaux
noeuds, et au rythme des cycles. Tout d'abord, le motif CONFIANCE est incrémenté de
30% pour chaque noeud éliminé de par l'acceptation d'une similitude avec un des
noeuds du graphe. Si on néglige l'influence de ce motif au rythme des cycles, le
facteur de 30% fut choisi pour que CONFIANCE soit pleinement activé après que quatre
noeuds soient éliminés. Ceci assure une plus grande certitude sur la localisation de
l'agent dans son graphe, afin de pallier à des erreurs potentielles causées par une
mauvaise détection de similitudes. Par contre, le motif CONFIANCE est décrémenté de
30% si aucune similitude n'est établie pour le nouveau noeud construit. De plus, en
l'absence de trois noeuds récents ou lorsque les noeuds tampons doivent être
initialisés, le motif CONFIANCE est complètement inhibé.
Le motif CONFIANCE est aussi influencé au rythme des cycles d'exécution lorsqu'il
est possible d'anticiper le prochain noeud. L'agent doit donc être localisé dans le
graphe topologique en sachant précisément où il se trouve par rapport à une
trajectoire passée. À partir du sens déduit du lien entre les deux noeuds les plus

128
récents, le prochain noeud lié au noeud le plus récent est choisi en fonction du lieu
topologique en construction. Si plusieurs noeuds répondent à ce critère, un noeud
ayant une recommandation cognitive d'exploration (pour ne pas permettre
l'exploration à partir d'endroit où elle fut déjà réalisée), ou faisant parti d'une
trajectoire planifiée, est favorisé. Un noeud de marque ne peut être choisi car il est
impossible de comparer les formes topologiques directement avec l'état topologique du
noeud. Si un noeud peut être choisi, le motif CONFIANCE est incrémenté de 2.5% à
chaque cycle jusqu'à la création d'un nouveau noeud. Sinon, il est décrémenté de
2.5% à chaque cycle. De cette façon, le motif CONFIANCE est pleinement activé lorsque
l'agent est sûr de sa position dans son graphe topologique et de la validité potentielle
du noeud en construction. L'ensemble de ces influences, soit la localisation dans le
graphe topologique, l'utilisation anticipative de ces connaissances et l'intégration
temporelle de ces états par le motif CONFANCE, assure l'émergence à partir de ce qui
est vécu et déduit de l'agent lors de ses interactions avec son environnement.
7.5. Planification à partir du graphe topologique
La planification de trajectoires à partir du graphe topologique est nécessaire pour
indiquer à l'agent s'il se dirige dans la bonne direction, ou pour reproduire des
conditions de fonctionnement lorsqu'il désire atteindre des buts. Les expériences
passées peuvent ainsi servir à la réalisation des objectifs dynamiques de l'agent.
Mataric [128, 129] arrive à planifier des trajectoires dans son graphe topologique en
utilisant un mécanisme de propagation parallèle d'activation, avec une priorité sur
les trajets minimisant le nombre de noeuds et la longueur. Un principe similaire est
reproduit pour le graphe topologique présenté dans cette thèse. Les prochaines sous-
sections décrivent le mécanisme de propagation utilisé, les condition permettant la

129
planification et le motif CERTITUDE affecté par cette composante du module de
cognition.
7.5.1. Mécanisme de planification
La planification d'une trajectoire est réalisée en propageant des niveaux
d'activation entre les noeuds du graphe topologique, en partant du noeud le plus
récent vers un noeud localisant le but à atteindre. Les buts possibles sont un point de
charge, ou une cible qui ne fut pas revisitée lors de l'exploitation du graphe
topologique. Pour que le trajet planifié soit le plus optimal possible, la propagation
d'activation s'effectue selon les critères suivants:
- favoriser le trajet dans le sens actuel du déplacement de l'agent (déterminé par
le lien entre les deux noeuds les plus récents);
- prendre le chemin le plus court en fonction du nombre de noeuds (selon le
niveau d'activation propagé). Si un noeud se voit activé par plusieurs niveaux
identiques, la longueur du trajet le plus court sert à choisir le trajet préférable;
- éviter les trajets qu'il est préférable de ne pas reprendre pour atteindre un but.
Les conditions jugées néfaste pour la planification de trajectoires sont
l'occurrence des motifs DÉTRESSE et DÉCEPTION, l'utilisation du comportement
FOLIE, des conditions cognitives et topologiques indiquant le demi-tour de l'agent
(ceci est implicitement considéré par le processus d'activation, mais une
condition explicite est considérée au cas ou des difficultés surviennent lors de
l'exécution du demi-tour, ce qui peut être difficile à reproduire), et la nécessité
de parcourir un noeud de transition de type Face vers x en sens inverse.
Pour pouvoir discriminer les activations dans le sens du déplacement de l'agent, les
activations ont un signe défini au noeud de départ. Une activation positive est
transmise aux noeuds liés au noeud de départ (soit le noeud le plus récent) et qui se
trouvent dans le même sens prioritaire, et négative pour les autres. La propagation

130
s'effectue par une boucle qui identifie tous les noeuds ayant le niveau d'activation à
considérer, et qui permet la transmission l'activation à tous les voisins de ces noeuds
en fonction des critères précédents. Le processus se termine lorsqu'un noeud de but
désiré est trouvé, ou qu'il n'est plus possible d'y propager des activations. De cette
façon, le processus d'activation est limité à la grosseur du graphe et n'est pas perturbé
par la présence de boucle ou de branche en cul-de-sac (comme c'était le cas pour
Mataric [128, 129]). Si une trajectoire existe, les informations retournées sont le sens
du trajet à suivre, sa longueur, le nombre de noeuds du trajet et le numéro du noeud
associé au but visé. Lorsque le trajet planifié est dans le même sens du déplacement de
l'agent, la trajectoire résultante est identifiée en effectuant le trajet inverse à partir
des niveaux d'activation et des longueurs. Ceci permet de reproduire des conditions
comportementales lorsque l'agent se dirige dans la bonne direction par rapport à son
but.
12
3
45
-3
-4
-3
-2
Sensactuel2
-6
-4
-5
-4
-3
-5
a) Branche dans le graphe topologique b) Boucle dans le graphe topologique
61
Figure 7.15 Processus d'activation dans le graphe topologique pour planifier une
trajectoire
La figure 7.15 illustre le principe de fonctionnement du mécanisme d'activation à
travers les noeuds du graphe topologique. Les noeuds de départ sont représentés en
gras, et les noeuds d'arrivée sont en relief. Les niveaux d'activation propagée sont
représentés à l'intérieur des noeuds. La situation en a) illustre un cas où la

131
planification s'effectue à partir d'une nouvelle branche dans le graphe topologique.
Si une trajectoire existe, ceci indique à l'agent qu'il doit faire demi-tour pour
atteindre l'objectif visé. Il est possible de remarquer le blocage de la propagation
d'activation lorsque les chemins dans le graphe topologique se croisent. La situation
b) représente une planification lorsque l'agent sait où il se trouve dans le graphe
topologique. Le mécanisme de propagation dans les deux sens avec l'affectation du
signe à l'activation du noeud de départ y est illustré.
7.5.2. Conditions permettant la planification
Une planification est réalisée suite à la création d'un nouveau noeud et que l'agent
ait tenté de se positionner dans son graphe topologique. Puisqu'elle nécessite une
recherche par boucle sur tous les noeuds du graphe, la planification doit être
effectuée qu'en extrême nécessité telle que dictée par trois types de conditions. Tout
d'abord, un but doit être poursuivi par l'agent. Le but le plus prioritaire est l'atteinte
d'un point de charge. L'occurrence de ce but est perçu par le module de cognition par
la formulation d'une recommandation favorable du comportement RECHARGE par le
module de besoins et transmise au module de sélection finale. L'autre but consiste à
atteindre une cible, perçu de la même façon mais en considérant le comportement
CIBLE. Ce but est poursuivi automatiquement lorsque le motif EXPLOITER est unitaire,
indiquant à l'agent qu'il a suffisamment exploré son environnement et qu'il peut
maintenant se servir des connaissances acquises pour réaliser sa tâche. L'occurrence
de ces buts et leur réalisation s'évaluent au rythme des cycles. Si le trajet planifié
vers la cible est trop long pour la quantité d'énergie restante, le motif MANGER est
alors incrémenté par une influence cognitive, et le noeud visé est identifié comme
ayant un but prioritaire. Après la recharge, une trajectoire est à nouveau planifiée
pour atteindre ce noeud. Si cet objectif n'a pu être atteint avant une seconde
recharge, il est alors abandonné.
132
Le second type de conditions considère l'état du traitement suite au positionnement
dans le graphe topologique. Si des noeuds tampons font encore partis des noeuds
récents construits, ou qu'une branche est en cours de construction (une similitude
n'a pu être trouvée à la suite du traitement illustrée à la figure 7.10, une planification
indiquerait prématurément à l'agent qu'il doit faire demi-tour), alors la planification
n'est pas activée.
Enfin, le troisième type de conditions est formé des alternatives possibles
permettant la planification, soit:
- l'occurrence d'un nouveau but;
- un nouveau branchement dans le graphe topologique suite au traitement de la
composante de positionnement du module de cognition;
- le passage d'un niveau de CERTITUDE unitaire à nul, signifiant l'incapacité de
l'agent de suivre (ou de reprendre) une trajectoire planifiée;
- un trajet planifié indique à l'agent qu'il doit faire demi-tour, mais l'agent
n'arrive pas à réaliser ce demi-tour. Ceci permet de suivre l'évolution des
conditions jusqu'à ce qu'un action soit prise ou que la situation change.
7.5.3. Variation du motif CERTITUDE en fonction de la planification
Le motif CERTITUDE reflète la capacité de l'agent de planifier une trajectoire vers
un but donné à partir des connaissances mémorisées dans son graphe topologique.
Lorsqu'une trajectoire est planifiée, le niveau de CERTITUDE est à son maximum. Si
cette planification indique que l'agent est dans la bonne direction, alors le motif est
incrémenté de 12.5% pour chaque nouveau noeud construit qui fait parti de cette
trajectoire. Sinon, il est décrémenté d'un même facteur. Par contre, s'il doit faire
demi-tour, le motif CERTITUDE est maintenu à un niveau unitaire jusqu'à ce que
l'action pour faire marche-arrière soit entamée. Il est alors décrémenté de 12.5%.
Une fois le demi-tour complété, le module de cognition considère alors l'agent comme

133
étant orienté dans la bonne direction, et le motif est affecté par la capacité de l'agent
à reprendre (car en faisant demi-tour, de noeuds différents de ceux du graphe seront
construits) et à suivre la trajectoire planifiée. Le facteur de décrémentation fut
choisi pour laisser un intervalle de huit noeuds avant d'inhiber complètement ce
motif. Une nouvelle planification risque alors d'être exécutée, comme mentionné à la
section 7.5.2. Si aucun trajet n'est planifié ou qu'il n'existe pas trois noeuds récents,
alors le motif CERTITUDE est complètement inhibé. Ces facteurs forment les
influences cognitives desquelles émerge ce motif.
7.6. Optimisation du graphe topologique
Mataric indiqua en [129] que les structures de graphe avec connexions arbitraires
et dynamiques peuvent escalader à une pleine connectivité. Le graphe topologique
présenté dans cette thèse est sujet à la même limitation. En effet, au cours de
l'exploration de son environnement, l'agent peut construire un grand nombre de
noeuds et de branches permettant d'y caractériser différents endroits et d'établir des
liens entre ces branches. Ceci est encore plus le cas avec l'approche topologique
présentée ici car l'unicité des noeuds n'est pas une contrainte considérée. Un
mécanisme de sélection des noeuds utiles semble donc nécessaire pour libérer de
l'espace-mémoire utilisée par le graphe topologique et optimiser les connaissances
qui y sont mémorisées. Un graphe topologique rempli n'est toutefois pas la seule
raison d'utiliser un tel mécanisme. L'agent qui arrive à explorer son environnement,
à bien caractériser les points de repère topologiques qu'il y perçoit et qui les utilise
efficacement pour s'y localiser, peut se sentir apte à exploiter ses connaissances pour
l'assister dans la réalisation de ses buts.
La détection de ces deux conditions constitue en fait le rôle du motif EXPLOITER
décrit à la section 6.4. L'optimisation du graphe topologique est permise lorsque le

134
motif EXPLOITER a atteint un niveau supérieur à 0.9 et inférieur à 1. Cette condition
est causée par l'utilisation de tous les noeuds du graphe ou par une longue période
d'excitation par le motif CONFIANCE. Le graphe topologique est alors prêt à être
exploité, mais avant il est préférable de l'optimiser. Cette optimisation a toutefois lieu
une fois que l'agent se soit immobilisé au point de charge (Evans [62] indiqua que le
repos peut servir à réorganiser la mémoire). Ceci permet de concentrer les
ressources de l'agent à son déplacement et de réaliser la réorganisation de sa mémoire
en temps opportun.
Trois critères sont utilisés pour discriminer les noeuds utiles de ceux qu'il est
préférable d'oublier:
- le noeud fut visité plus d'une fois par l'agent lors de son exploration de
l'environnement. L'agent avait alors réussi à s'y localiser par la composante de
positionnement du module de cognition;
- le noeud fait parti d'une trajectoire obtenue par planification entre un noeud
localisation un cible et le noeud le plus proche identifiant un point de charge.
Cette trajectoire est obtenue à même les mécanismes utilisés pour la
planification, et est donc sujette aux mêmes critères de sélection. Le sens
prioritaire est donné aux trajets partant du point de charge vers la cible dans le
sens où les noeuds furent construits afin de faciliter la reproductibilité du trajet.
Les noeuds faisant partis d'un tel trajet, s'il existe, sont préservés. Ce processus
est réalisé pour chacun des noeuds identifiant une cible dans le graphe
topologique;
- le noeud mémorise l'emploi d'une condition cognitive pour l'exploration de
l'environnement. Un tel noeud est préservé pour ne pas reprendre l'exploration
au même endroit, une fois l'exploitation du graphe terminée.
135
Les noeuds qui ne répondent pas à ces critères sont éliminés, et le nombre de
visites pour les autres sont réinitialisés à 1 pour identifier leur sélection et permettre
leur oubli lors d'optimisation future s'ils n'étaient alors plus revisités. Ce mécanisme
d'optimisation est simple et tient compte de ce qui émergent comme connaissances
jugées utiles pour l'agent. De plus, il est activé de façon autonome en fonction des
motifs d'introspection internes de l'agent et de ses limitations en espace-mémoire.
7.7. Recommandations cognitives et paramètres internes transmis a u x
comportements
Le module de cognition recommande l'utilisation de comportements dans le but
d'orienter l'agent en fonction de ce qu'il a pu dégager comme connaissances sur
l'environnement et de ses interactions avec lui. Les recommandations cognitives sont
gérées en deux étapes:
- examen des conditions permettant la formulation, l'initialisation et le maintien
des recommandations cognitives, ainsi que le transfert de paramètres internes
aux comportements si nécessaire;
- formulation des recommandations cognitives. Contrairement aux autres modules
de recommandations, le module de cognition formule des recommandations
binaires, soit avec des degrés d'appartenance unitaire ou nul telles que présentés
par la relation (7.2).
mdesc Comportement( ) = 0|1{ }
m indc Comportement( ) = 0|1{ }(7.2)!
Les influences cognitives sur les comportements s'effectuent à quatre niveaux:
- exploration de nouveaux endroits en s'éloignant perpendiculairement à une
surface;

136
- effectuer un demi-tour;
- recommandations de comportements pour reproduire les conditions lors du suivi
d'une trajectoire, ou pour éviter des situations néfastes;
- lancer un appel à l'aide.
Les prochaines sous-sections expliquent plus en détail chacun de ces influences
cognitives.
7.7.1. Exploration par éloignement perpendiculaire à une surface
Pour pouvoir aller visiter d'autres endroits dans son environnement et
possiblement y trouver des cibles ou des points de charge, l'agent doit s'éloigner des
surfaces. La pleine activation du motif EXPLORER indique à l'agent qu'il est prêt à
agir en conséquence. Pour y arriver, le comportement TOURNE90 est activé. Pour
être utilisé adéquatement, ce comportement demande que l'agent dispose d'un lieu
stable et suffisamment long pour lui permettre de s'arrêter et d'avoir une bonne
référence pour effectuer la rotation, sans être influencé par des repères aux
alentours. Un tel endroit est identifié par l'anticipation de noeuds de marque de type
Côté x suffisamment long. Le critère utilisé ici est que la longueur du noeud soit
supérieure à huit. Ce noeud ne doit pas avoir déjà servi pour l'exploration afin que
l'agent active ces conditions que pour des endroits nouveaux. Dès lors, lorsque l'agent
se croit être à la moitié de la longueur de ce noeud, les conditions sont activées pour
éloigner l'agent perpendiculairement à la surface. Ces conditions sont la
recommandation du comportement TOURNE90, et l'inhibition par indésirabilité des
comportements VITESSE et ALIGNER. Ces conditions sont maintenues tant que la
forme topologique identifiée diffère de Accotté à un mur ou qu'un maximum de six
cycles soit atteint. Cette limite maximale est utilisée pour inhiber ces conditions au
cas d'un mauvais déroulement de la rotation. ensuite, tant que la forme topologique
identifiée est Accotté à un mur, le comportement ALIGNER continue d'être inhibé

137
pour laisser la chance à l'agent de s'éloigner de la surface. Si le motif EXPLORER
tombe à zéro au cours de tout ce traitement, toutes ces conditions sont inhibées pour
donner la priorité à d'autres types d'actions de l'agent. L'utilisation de cette règle
cognitive est mémorisée en fonction du sens de rotation effectuée dans le noeud en
construction du graphe topologique. Enfin, un noeud de transition de type Tourne 90
x devrait être construit, si tout se passe bien.
7.7.2. Demi-tour
Un second type d'actions contrôlé par le module de cognition permet à l'agent de
faire demi-tour. Ceci survient suite à une planification ou par la peine activation du
motif DÉCEPTION. Le principal comportement impliqué lors de cette opération est
TOURNE180. Comme pour TOURNE90, il demande une surface de type Côté pour s'en
servir de référence. Lorsque le lieu topologique en construction répond aux critères
d'un tel noeud de marque, les conditions pour débuter la rotation sont activées en
recommandant cognitivement l'utilisation de TOURNE180 et en inhibant par
indésirabilité VITESSE, ALIGNER et CIBLE (pour ne pas être influencé durant la
rotation si ce comportement devient exploitable). Le sens de rotation est initialisé en
fonction du côté pris en référence, en ajustant les règles du comportement
TOURNE180 pour effectuer une rotation vers l'extérieur de cette surface. Ces
conditions sont maintenues tant que la forme topologique bivalente de l'état de départ
n'est pas observée, ou qu'un maximum de dix cycles soit atteint. Si le motif CERTITUDE
est placé à une valeur de 0.4 durant cette étape, les conditions sont inhibées car le
comportement RECHARGE est alors exploité et il n'est plus alors nécessaire de faire
demi-tour (voir section 6.4). L'utilisation de cette règle cognitive est mémorisée dans
le noeud créé lorsque les conditions furent initiées. Un noeud de transition de type
Tourne 180 x devrait aussi être construit, si tout se passe bien. Enfin, les conditions
pour effectuer un demi-tour sont évaluées en priorité avant celle pour s'éloigner
138
perpendiculairement à une surface, ce qui permet d'éviter des conflits potentiels
entre les deux.
7.7.3. Recommandations de comportements basées sur ce qui fut mémorisé dans le
graphe topologique
Une trajectoire mémorisée peut demander l'utilisation de certaines conditions
comportementales pour pouvoir la reproduire ou pour éviter des situations qui furent
jugées nuisibles pour l'agent. Lorsque l'agent sait bien où il se trouve par rapport à
une trajectoire mémorisée dans son graphe topologique, il peut se servir de
l'anticipation des prochains noeuds et des informations qui y ont été sauvegardées
pour recommander cognitivement des comportements. Deux cas sont considérés par
le module de cognition. Premièrement, si le noeud anticipé mémorisa l'existence du
motif DÉTRESSE, alors l'agent tente d'éviter que se reproduise les mêmes conditions en
inhibant par indésirabilité cognitive le comportement ALIGNER. On espère alors que
cette condition donnera plus de liberté à l'agent pour se sortir d'impasse.
La seconde condition permet de reproduire une trajectoire planifiée. Bien que les
informations mémorisées dans les noeuds ne permettent pas de relater tout ce qui s'est
passé lors de la construction (par exemple, seule mdes maximum est enregistrée, et non
sa progression), l'agent peut quand même tenter (car les autres sources de
recommandations formulent eux-aussi des recommandations) de s'en approcher en
tentant de reproduire les conditions comportementales par recommandations
cognitives, et en laissant les comportements réagir à l'environnement. Pour
permettre de formuler de telles recommandations, l'agent doit être en pleine
CERTITUDE, indiquant qu'il suit bien une trajectoire planifiée. Si la recommandation
d'un comportement particulier fut mémorisée dans le noeud anticipé suivant la
position de l'agent dans son graphe topologique, alors elle est formulée par le module
de cognition (selon le degré d'activation mémorisé et selon qu'il est favorable ou non

139
d'utiliser ce comportement). Cette condition est valide que pour CIBLE car le
comportement FOLIE, qui est lui-aussi un comportement mémorisé dans les noeuds du
graphe, sert de condition de rejet lors de la planification de trajectoire (voir section
7.5.1). De plus, si une condition cognitive pour effectuer une exploration
perpendiculaire à la surface se trouve sur cette trajectoire planifiée, alors les
conditions expliquées en 7.7.1 sont reproduites. Les conditions pour faire demi-tour
ne sont pas reproduisibles car elles sont aussi rejetées lors de la planification.
7.7.4. À l'aide
La dernière influence cognitive sur les comportements permet à l'agent
d'extérioriser sa prévision concernant son manque d'énergie prochain. En effet,
l'agent peut comparer le nombre de cycles qui lui reste d'énergie avec le résultat
d'une planification de trajet vers le point de charge. De plus, il anticipe
automatiquement sa mort s'il ne lui reste plus que pour dix cycles d'énergie. S'il
prévoit ne pas pouvoir arriver à un point de charge avant de manquer d'énergie,
l'agent manifeste qu'il entrevoit avoir des difficultés à survivre en recommandant
l'activation du comportement ALARME. Ces recommandations s'effectue de façon à ce
que la couleur de l'agent change répétitivement afin de communiquer un S.O.S. Ceci
peut être perçu comme un appel au secours envoyé à tout autre agent susceptible de
comprendre son message et de lui porter secours. Malheureusement les
expérimentations n'en prévoit pas, et la seule chance de survie de l'agent consiste à
atteindre par miracle le point de charge avant de ne plus avoir d'énergie. L'émission
du S.O.S. est alors arrêtée.
7.8. Avantages et inconvénients du graphe topologique

140
Les méthodes utilisées par le module de cognition pour l'utilisation d'une
représentation topologique démontrent plusieurs avantages. Elles permettent la mise
en oeuvre d'une représentation flexible, compacte, réversible, située, adaptée et
tolérante aux fautes (causées par le comportement réactif de l'agent, sa perception
limitée et les limitations des mécanismes employés). Le traitement réalisé à partir
d'une fenêtre de trois noeuds permet de limiter la nécessité de distinguer les endroits
en considérant toujours l'orientation comme critère essentiel de discrimination. Un
tel critère demanderait qu'elle soit toujours bien synchronisée par rapport au graphe
topologique. En considérant plutôt des séquences de noeuds, l'agent arrive à se
resituer dans son graphe topologique peu importe son point de départ. Cette situation
survient lorsque l'agent reprend l'exploitation de son environnement après que son
graphe topologique fut exploité. La réutilisation de graphes topologiques
préalablement construits est aussi possible. Par les mécanismes utilisés par le module
de cognition, des connaissances émergent à l'interne de ce qui est vécu et identifié de
l'externe.
Par contre, ces méthodes ne sont pas sans lacunes. Tout d'abord, l'utilisation
d'expressions régulières pour inférer la rotation réalisée demande d'avoir définie le
plus de transitions possibles. Sinon, des rotations de l'agent ne pourront être bien
représentées à l'interne, causant des erreurs d'approximation sur l'orientation des
noeuds de marque. Des situations particulières peuvent être difficiles à traiter à cause
des limitations à ce niveau, comme les environnements composés que de séquences
topologiques similaires (un hexagone par exemple), ou ceux ayant une forme
circulaire de rayon très grand (un seul noeud de marque) ou très petit (un seul noeud
de transition) par rapport à la dimension de l'agent. De plus, la discrimination des
noeuds et le positionnement dans le graphe sans employer des critères stricts (comme
des estimés de position) demande des mécanismes plus complexes. La possibilité de
représenter des endroits identiques par des noeuds différents amène aussi la

141
construction de branches parallèles qui peuvent causer des difficultés à l'agent pour
se positionner efficacement. Enfin, les limitations propres au positionnement et
l'incapacité de l'agent d'identifier une même cible peuvent entraîner des difficultés
pour évaluer l'atteinte d'un but, surtout si la zone de cible est très grande (une même
cible peut alors être représentée par plusieurs noeuds).
Des améliorations au niveau perceptuel et au niveau des mécanismes pour
permettre des analyses cognitives plus poussées pourraient arriver à limiter ces
lacunes. Mais l'objectif est plutôt d'arriver à faire le mieux possible et le plus
simplement possible avec ce que l'agent a comme capacités d'actions, de perception,
de traitement et de décision. L'agent doit donc être en mesure de s'adapter à ses
propres limitations.

142
8. CARACTÉRISTIQUES DES MODULES DE SITUATION EXTERNE GLOBALE, DE BESOINS ET
DE SÉLECTION FINALE
Ce chapitre présente la mise en oeuvre des modules utilisant la logique floue pour
la formulation de recommandations et la sélection des comportements. Ces modules
sont le module de situation externe globale, le module de besoins et le modules de
sélection finale.
8.1. Description du mécanisme et des règles utilisées par le module de
situation externe globale
Pour choisir des comportements en fonction des conditions environnementales
rencontrées, le module de situation externe globale utilise des règles floues et
travaille à partir des sensations fuzzifiées. Ce module considère uniquement les
informations obtenues des sensations environnementales pour dicter le choix de
comportements. Ces règles de recommandations indiquent par un degré
d'appartenance flou la désirabilité ou l'indésirabilité de comportements en fonction
des antécédents considérés. Après la fuzzification (relation (5.1)), les étapes de
traitement pour ce module sont:
1) Inférence des règles r du module de situation externe globale s, relation (8.1),
selon l'opérateur de conjonction floue ƒ minimum. Cette opération est répétée pour
toutes les règles définies pour le module de situation externe globale.
mdesrsComportement( ) = ƒ mAn
Sensation( )[ ]m indrs
Comportement( ) = ƒ m AnSensation( )[ ]
(8.1)
2) Union des conséquences, relation (8.2), par l'opérateur de disjonction floue ⊕
maximum. Cette opération consiste à unifier les recommandations favorables

143
(désirabilité) ou défavorables (indésirabilité) pour chacun des comportements traités
par le module.
mdess Comportement( ) = ⊕ mdess Comportement( )[ ]m inds
Comportement( ) = ⊕ mindsComportement( )[ ]
(8.2)
La figure 8.1 présente les règles et les fonctions d'appartenance employées par ce
module. On retrouve ici l'aspect émergence de la situation car la sélection de
comportement se fait en fonction de ce qui est perçu de l'environnement par les
recommandations formulées en parallèle par ses règles, sans avoir été explicitement
planifiée. La première règle sert à recommander l'utilisation du comportement
URGENCE à partir des mêmes variables linguistiques associées aux capteurs avants de
proximité et utilisées par ce comportement. Ceci fait d'URGENCE un comportement
purement réactif. Les deuxièmes et troisième règles servent à l'approche d'un
obstacle détecté à l'avant. La priorité est donnée au comportement ÉVITER. Le
comportement CIBLE est alors inhibé, tandis que les comportements VITESSE et
ALIGNER sont recommandés en l'absence de cette condition. Ce comportement n'est
pas aussi réactif que URGENCE car une seule variable d'entrée commune avec ÉVITER
est utilisée pour l'activer (soit le capteur avant), mais par une variable linguistique
différente.
Deux remarques doivent être faites concernant la variable linguistique Obstacle-
avant concernant l'activation de ÉVITER. Tout d'abord, cette variable inclut une
condition activant le comportement URGENCE. Ceci permet une action combinée de
ces deux comportements, mais une plus grand attention doit être portée au niveau du
recouvrement des variables linguistiques utilisées par ces comportements (voir
figures 5.4 et 5.5). Ensuite, Obstacle-avant inclut aussi la variable linguistique
Proximité-avant utilisée par ÉVITER. Ceci permet d'exploiter ÉVITER avec ses capteurs
en angle à l'approche d'un coin lorsque l'agent suit le contour d'une pièce. Mais si

144
rien n'est perceptible par ces capteurs, alors aucune réaction ne sera fournie par le
comportement dans la zone morte incluse dans Obstacle-avant mais exclue de
Proximité-avant. Ces mécanismes sont nécessaires pour une gestion efficace de la
transition et des conflits possibles entre ces comportements.
!!<Danger> !!SI !Danger-avant !!OU !Danger-avant-droite !!!OU !Danger-avant-gauche !!!ALORS!URGENCE!!<Obstacle> !!SI !Obstacle-avant !!!ALORS!ÉVITER!!ET!!NON (CIBLE)
!<Normal> !!SI !NON (Obstacle-avant) !!!ALORS!VITESSE!!ET!!ALIGNER
!<Identification de formes>!!SI!NON (Immobile-vitesse)!!OU!NON (Immobile-rotation)!!ALORS !IDENTIFICATION !!!!!!!!!!!!!!!!!FORME TOPOLOGIQUE
!<Chargement>!!SI Quasi-immobile!!ET Charge-visible-gauche!!ET Recharge-visible-droite!!ALORS NON (ALIGNER)
00 10 20 30 40 50 60
0.5
1m
Danger-avant
Obstacle-avant
Capteur avant
00 10 20 30 40 50 60
0.5
1m
Danger-avant-x
Capteur avant x
00 2 4 6 8 10
0.5
1m
Quasi-immobile
Vitesse
Immobile
0-2 -1.5 -0.5 0 0.5 1.5 2
m
1-1
0.5
1
Lecture rotation
Immobile-rotation
00 40 80 120 160 200
0.5
1m
Charge-visible-x
Détecteur x point de charge
Figure 8.1 Règles et fonctions d'appartenance utilisées par le module de situation
externe globale
Pour revenir à la figure 8.1, la quatrième règle du module de situation externe
globale sert à activer le comportement d'identification de formes (défini à la section
7.2) tant que l'agent est en mouvement (comme perçu par sa vitesse et sa rotation).
145
Enfin, la cinquième règle sert à inhiber ALIGNER aux alentours du point de charge
lorsque l'agent est presqu'immobilisé (soit lors de son départ ou de son arrivée). Ceci
facilite le positionnement de l'agent au point de charge ainsi que la reprise de sa
trajectoire, surtout lorsque le point de charge se trouve dans un coin de la pièce.
8.2. Description du mécanisme et des règles utilisées par le module de
beso ins
Pour que l'agent puisse jouer son rôle dans l'environnement, il doit gérer de façon
efficace ses besoins. Trois types de besoins ont été considérés dans les
expérimentations avec BugWorld: le besoin physiologique de garder l'accumulateur
d'énergie chargé, le besoin de sécurité pour éviter les conditions nuisibles et assurer
le bon fonctionnement de l'agent dans l'environnement, et le besoin
d'accomplissement qui consiste ici à atteindre des cibles. Ceci rejoint l'interprétation
de Maslow qui suggèrent l'utilisation de motivations physiologiques (motivations
intrinsèques ne pouvant rester insatisfaites très longtemps [138] et qui doivent être
hiérarchisées à l'interne), de sécurité (motivation intrinsèque), et de réalisation
(motivation externe) [127]. Ce module vient donc choisir les comportements
permettant d'assurer la satisfaction de ces besoins.
D'une façon très similaire au module de situation externe globale, le module de
besoins utilise des règles floues évaluées en parallèle pour recommander l'utilisation
ou non de comportements. La différence est que des motifs sont principalement
utilisés au niveau de ces règles. Les motifs arrivent ainsi à influencer la
recommandation de comportements, et les sensations sont utiles pour coordonner ces
choix. Les étapes de traitement sont:
146
1) Inférence des règles r du module de besoins b, relation (8.3), selon l'opérateur
de conjonction floue ƒ minimum. Cette opération est répétée pour toutes les règles
définies pour le module de besoins.
mdesrbComportement( ) = ƒ mAn
Motif | Sensation( )[ ]m indrb
Comportement( ) = ƒ mAnMotif |Sensation( )[ ]
(8.3)
2) Union des conséquences, relation (8.4), par l'opérateur de disjonction floue ⊕
maximum. Cette opération consiste à unifier les recommandations favorables
(désirabilité) ou défavorables (indésirabilité) pour chacun des comportements traités
par le module.
m desbComportement( ) = ⊕ m desb
Comportement( )[ ]m indb
Comportement( ) = ⊕ m indbComportement( )[ ]
(8.4)
La figure 8.2 présente les règles et les fonctions d'appartenance employées par ce
module. L'émergence est préservée ici car ces règles réagissent aux conditions qui
surviennent de par les motifs et les sensations en visant l'atteinte des besoins
associés. Les trois premières règles servent à la gestion des comportements lorsque le
désir de manger se fait sentir. La première sert à la gestion des priorités entre les
comportements (on remarque que l'exploration avec TOURNE90 est alors inhibée). La
seconde laisse le contrôle de la vitesse au comportement RECHARGE à l'approche d'une
point de charge, et permet aussi d'éviter la reproduction de conditions de DÉTRESSE
lorsque l'agent arrête de se déplacer pour se recharger. La troisième inhibe ALIGNER
pour ne pas perdre de temps à s'aligner par rapport à la surface. Le désir de se
recharger existant alors, il est plus important que l'agent se concentrer davantage à
l'atteinte du point de charge perçu.

147
!!<Désir-manger> !!SI !Désir-recharge-existe !!ALORS!RECHARGE!!ET!!NON (CIBLE)!!ET!!NON (FOLIE)!!ET !!NON (TOURNE90)!!<Point-de-charge-approche-x> !!SI !Désir-recharge-existe!!ET !Charge-visible-x !!!ALORS!NON (VITESSE)!!<Point-de-charge-proximité-x> !!SI !Désir-recharge-existe !!ET !Charge-proximité-x !!!ALORS!NON (ALIGNER)!!<Bloque> !!SI !Détresse-existe !!!ALORS!DÉGAGE!!ET!!ALARME!!ET!!NON (ALIGNER)
!<Problème>!!SI!Détresse-importante!!ALORS!NON (ÉVITER)!!ET!!NON (CIBLE)!!ET!!NON (FOLIE)
!<Accomplissement> !!SI !Joie-faible !!!ALORS!CIBLE
!<Heureux>!!SI!Joie-grande!!ALORS !FOLIE!!ET!!NON (VITESSE)!!ET!!NON (ALIGNER)
00 0.2 0.4 0.6 0.8 1
0.5
1m Détresse-existe
Détresse-importante
Détresse
00 0.2 0.4 0.6 0.8 1
0.5
1m Joie-faible Joie-
grande
Joie
00 0.2 0.4 0.6 0.8 1
0.5
1m Désir-recharge-existe
Manger
00 40 80 120 160 200
0.5
1m
Charge-visible-x
Détecteur x point de charge x
Charge-proximité-x
Figure 8.2 Règles et fonctions d'appartenance utilisées par le module de besoins
Les quatrième et cinquième règles servent en cas de détresse pour activer DÉGAGE
et ALARME (signalant alors l'état de détresse de l'agent par la modification de sa
couleur) tout en inhibant des comportements jugés problématiques en fonction du
niveau de DÉTRESSE observé. L'exploitation de DÉGAGE devrait résulter en un effet
neutralisateur sur les causes du motif DÉTRESSE, provoquant lui-même son extinction.
148
Le comportement ALIGNER est inhibé car il est fréquemment à l'origine des conflits
entre comportements, et que la priorité de l'agent n'est plus alors de suivre les
contours mais bien de se sortir d'impasse. Si le motif DÉTRESSE persiste à augmenter,
alors d'autres comportements sont inhibés pour faciliter le travail de DÉGAGE. Les
deux dernières règles sont influencées par la JOIE. Un faible niveau de JOIE active le
comportement CIBLE. Il faut remarquer que la fonction d'appartenance Joie-faible
est placée de telle sorte que l'atteinte d'une cible inhibe la recommandation de CIBLE,
car le motif JOIE est alors incrémenté de 30% (voir section 6.3). Si par contre le
niveau de JOIE est très élevé, l'agent sent le besoin de manifester cet état en
recommandant l'utilisation du comportement FOLIE. Les comportements VITESSE et
ALIGNER sont alors non recommandés pour laisser libre cours au comportement FOLIE
et pour éviter les conditions de DÉTRESSE associées à VITESSE. Une telle fonctionnalité
peut sembler frivole, mais elle sert ici à provoquer une désorientation de l'agent par
rapport à son environnement (pour vérifier la robustesse des mécanismes du module
de cognition). L'activation de FOLIE provoque sont inhibition après huit cycles
d'exécution consécutifs, comme expliqué à la section 6.3. Enfin, il est possible de
remarquer que la recherche de cibles s'effectuera seulement lorsque JOIE est faible,
laissant du temps à l'agent pour l'atteinte de d'autres objectifs non rattachés à son
besoin d'accomplissement, comme la nécessité d'acquérir des connaissances sur
l'environnement par son exploration à partir du module de cognition.
8.3. Description du mécanisme pour le module de sélection finale
Le module de sélection finale examine les choix comportementaux formulées par
les modules de recommandations afin d'établir l'activation des comportements à
utiliser. Le représentation de ces recommandations est basée sur les principes de
l'évaluation hédonistique. L'axiome hédonistique soutient que les organismes
149
dirigent leur comportement pour minimiser ou éviter les conséquences indésirables,
et maximiser ou favoriser les résultats désirables [25]. Un continuum hédonistique est
représenté à la figure 8.3, l'organisme favorisant toujours ses choix dans le sens de la
flèche [25]. Cette forme d'évaluation est appliquée ici aux choix posés par les sources
de recommandations: plus c'est désirable, plus grande sera la persistance et la vigueur
pour la réalisation du comportement; plus c'est indésirable, plus grande sera la
persistance et la vigueur pour l'éviter [25].
Neutre DésirableIndésirable
Figure 8.3 Processus hédonistique
La logique floue se prête bien à la mise en oeuvre d'un tel mécanisme. Telles que
présentées par les formules (8.2), (8.4) et (7.2), les trois modules de recommandations
sélectionnent les comportements en établissant leur désirabilité ou leur indésirabilité
en fonction de leurs propres critères d'évaluation. La désirabilité et l'indésirabilité
des comportements sont représentées respectivement par des degrés flous. Le rôle du
module de sélection finale conçu pour les expérimentations consiste à unifier les
recommandations formulées par ces modules pour chacun des comportements en
utilisant un opérateur de disjonction floue, et d'établir le degré d'activation des
comportements. Les opérations effectuées sont:
1) Union des recommandations désirables et indésirables pour chacun des j
comportements, pour obtenir les niveaux de désirabilité globale et d'indésirabilité
globale, relation (8.5) où y correspond à s (pour le module de situation externe
globale), b (pour le module de besoins) ou c (pour le module de cognition). La
disjonction ⊕ utilisée est le maximum.
150
mdes j( ) = ⊕ mdesy j( )[ ]m ind j( ) = ⊕ mindy j( )[ ]
(8.5)
2) Décision finale, relation (8.6). Un comportement j est donc activé si la
soustraction entre la désirabilité globale et l'indésirabilité globale est supérieure à 0
(c'est-à-dire que le comportement est plus désirable qu'indésirable). pour qu'un
comportement soit activé, il faut tout d'abord qu'il soit désiré, et qu'ensuite sont degré
de désirabilité soit supérieur à son degré d'indésirabilité.
mact j( ) = max 0, mdes j( ) - m ind j( )( ) (8.6)
151
9. RÉSULTATS ET OBSERVATIONS SUR LES EXPÉRIMENTATIONS AVEC BUGWORLD
Les chapitres 5 à 7 ont présenté les différents mécanismes utilisés dans les modules
de SIR pour réaliser les expérimentations avec BugWorld. Le présent chapitre
s'attarde plutôt sur les résultats obtenus par l'emploi de ces différents mécanismes
pour le contrôle de l'agent lors de ces expérimentations. Avant de présenter ces
résultats, il est bon de rappeler que l'objectif de l'agent est d'atteindre les cibles
présentes dans l'environnement tout en assurant un bon niveau de charge de son
accumulateur d'énergie. La stratégie mise en oeuvre pour y arriver consiste tout
d'abord à permettre à l'agent de se former une représentation interne de son
environnement en suivant les contours et ensuite en explorant les autres endroits.
Une fois cette représentation interne construite, l'agent peut l'exploiter pour s'aider à
retrouver les cibles ou le point de charge. Ses motifs permettent de gérer ses
différents besoins et buts. Une douzaine de comportements se trouvent dans la
banque de compétences de l'agent, et le graphe topologique a une capacité de 100
noeuds (incluant les trois noeuds tampons) si ce n'est pas autrement indiqué. La
figure 9.1 résume les différents intervenants mis en oeuvre dans SIR pour réaliser de
telles expérimentations.

152
Comportements
Fusion pardéfuzzification
centroïde
Cognition
Situation Externe Globale
Besoins
Motifs
Sensations Actions
Sélection Finale
m des m indes
m des m indes
m des m indes
Désirabilitém act
AntécédentsConséquences
Observationm expl, m act
URGENCE ÉVITER
VITESSE ALIGNER
CIBLE
DÉGAGE
RECHARGE
TOURNE90 TOURNE180
FOLIE
IDENT.FORMES
ENNUI
EXPLOITEREXPLORER
CERTITUDECONFIANCE
DÉCEPTION
DÉTRESSE
JOIE
MANGERFAIM
OptimisationPlanification
PositionnementConst. graphe topo.
Recom. cognitives
Règles floues
Règles floues
FormeTopologique
ALARME
Figure 9.1 Mise en oeuvre de SIR pour les expérimentations avec BugWorld
Les résultats présentés dans ce chapitre tentent de démontrer l'ensemble des
fonctionnalités affichées par l'agent pour la réussite de ses objectifs. Mais étant
donné que le comportement émergeant manifesté par l'agent dépend de ce qu'il
rencontre comme situations dans son environnement, il n'est pas toujours possible de

153
présenter d'une façon indépendante chacun des mécanismes développés. Deux
environnements différents ont donc été employés, chacun présentant deux
historiques distinctes relatant l'évolution dans la prise de décision et des états
internes de l'agent. Une historique est la description et la justification de la
trajectoire suivie par l'agent. Pour une description plus compréhensible de la
trajectoire empruntée par l'agent au cours de ces expérimentations, des traces
partielles démontrant son parcours pendant un certain nombre de cycles d'exécution
sont présentées. De plus, pour alléger la présentation, la trace complète d'activation
des motifs ainsi que des résultats généraux obtenus pour chacune des
expérimentations sont présentés en annexe. Seuls les motifs pertinents aux
explications sont fournis dans ce chapitre.
9.1. Environnement original venant avec B u g W o r l d
Pour illustrer le fonctionnement des mécanismes de base de l'agent, les premiers
résultats présentés sont tirés de l'environnement venant avec BugWorld (voir figure
4.1). Cet environnement est simple car les cibles et le point de recharge se trouvent
aux abords des surfaces. Toutefois, les angles de rotation aux différents coins sont
variés. Les prochaines sous-sections présentent deux historiques de trajectoire. La
première illustre un cas où l'ensemble des interactions de l'agent avec
l'environnement se sont bien déroulées. Les résultats présentés sont davantage axés
sur les mécanismes de base utilisés normalement par l'agent, plus particulièrement
son graphe topologique. La seconde présente plutôt une historique où l'agent a eu
quelques difficultés à réaliser sa tâche. L'emphase est davantage placée sur les
conditions particulières de fonctionnement, comme l'étude de la DÉTRESSE et de la
DÉCEPTION.
9.1.1. Historique de la première expérimentation avec l'environnement de BugWorld
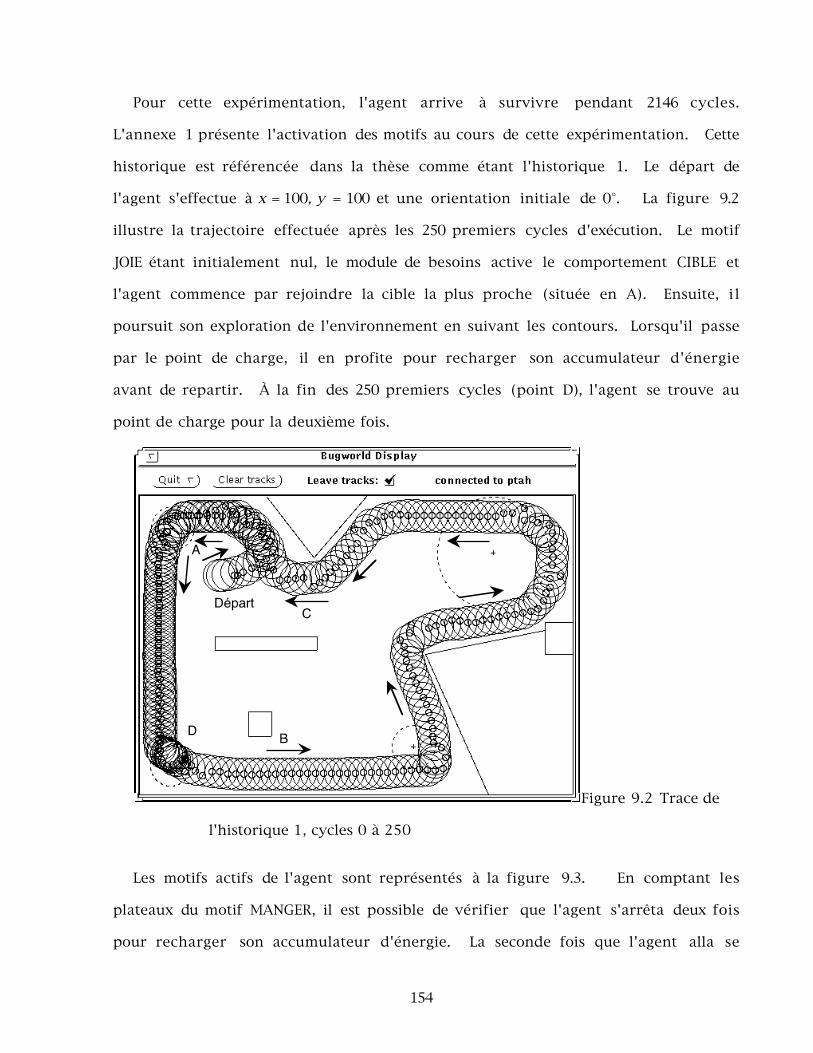
154
Pour cette expérimentation, l'agent arrive à survivre pendant 2146 cycles.
L'annexe 1 présente l'activation des motifs au cours de cette expérimentation. Cette
historique est référencée dans la thèse comme étant l'historique 1. Le départ de
l'agent s'effectue à x = 100, y = 100 et une orientation initiale de 0°. La figure 9.2
illustre la trajectoire effectuée après les 250 premiers cycles d'exécution. Le motif
JOIE étant initialement nul, le module de besoins active le comportement CIBLE et
l'agent commence par rejoindre la cible la plus proche (située en A). Ensuite, i l
poursuit son exploration de l'environnement en suivant les contours. Lorsqu'il passe
par le point de charge, il en profite pour recharger son accumulateur d'énergie
avant de repartir. À la fin des 250 premiers cycles (point D), l'agent se trouve au
point de charge pour la deuxième fois.
Départ
D
A
B
C
Figure 9.2 Trace de
l'historique 1, cycles 0 à 250
Les motifs actifs de l'agent sont représentés à la figure 9.3. En comptant les
plateaux du motif MANGER, il est possible de vérifier que l'agent s'arrêta deux fois
pour recharger son accumulateur d'énergie. La seconde fois que l'agent alla se

155
recharger, il commençait à avoir faim comme le montre le motif FAIM. De plus, à
chaque cible atteinte, son niveau de JOIE augmenta en conséquence. De cette même
figure, il est aussi possible de remarquer qu'au départ, le motif DÉCEPTION fut affecté
par l'orientation initiale de l'agent. Mais les influences des comportements CIBLE,
ÉVITER et ALIGNER lui permirent de se réorienter sans que ce motif atteigne une
grande activation.
00.5
1
50 100 150 200 250
Motif FAIM
00.5
1
50 100 150 200 250
Motif JOIE
00.5
1
50 100 150 200 250
Motif CONFIANCE
00.5
1
50 100 150 200 250
Motif MANGER
00.5
1
50 100 150 200 250
Motif DÉCEPTION
00.5
1
50 100 150 200 250
Motif EXPLORER
Figure 9.3 Motifs pour l'historique 1, cycles 0 à 250
Enfin, dès son premier tour de la pièce, l'agent arriva à se positionner dans son
graphe topologique. Ceci est reflété par le niveau de CONFIANCE et EXPLORER de la
figure 9.3. En examinant le graphe topologique présenté à la figure 9.4, il est possible
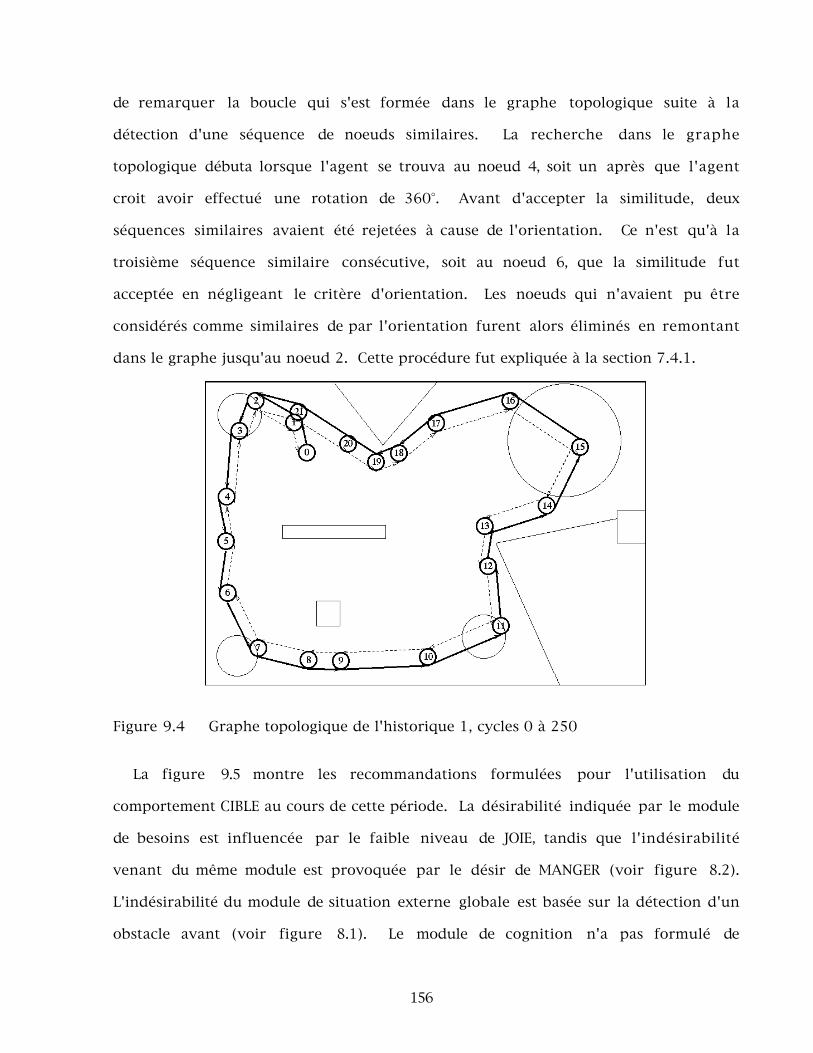
156
de remarquer la boucle qui s'est formée dans le graphe topologique suite à la
détection d'une séquence de noeuds similaires. La recherche dans le graphe
topologique débuta lorsque l'agent se trouva au noeud 4, soit un après que l'agent
croit avoir effectué une rotation de 360°. Avant d'accepter la similitude, deux
séquences similaires avaient été rejetées à cause de l'orientation. Ce n'est qu'à la
troisième séquence similaire consécutive, soit au noeud 6, que la similitude fut
acceptée en négligeant le critère d'orientation. Les noeuds qui n'avaient pu être
considérés comme similaires de par l'orientation furent alors éliminés en remontant
dans le graphe jusqu'au noeud 2. Cette procédure fut expliquée à la section 7.4.1.
Figure 9.4 Graphe topologique de l'historique 1, cycles 0 à 250
La figure 9.5 montre les recommandations formulées pour l'utilisation du
comportement CIBLE au cours de cette période. La désirabilité indiquée par le module
de besoins est influencée par le faible niveau de JOIE, tandis que l'indésirabilité
venant du même module est provoquée par le désir de MANGER (voir figure 8.2).
L'indésirabilité du module de situation externe globale est basée sur la détection d'un
obstacle avant (voir figure 8.1). Le module de cognition n'a pas formulé de
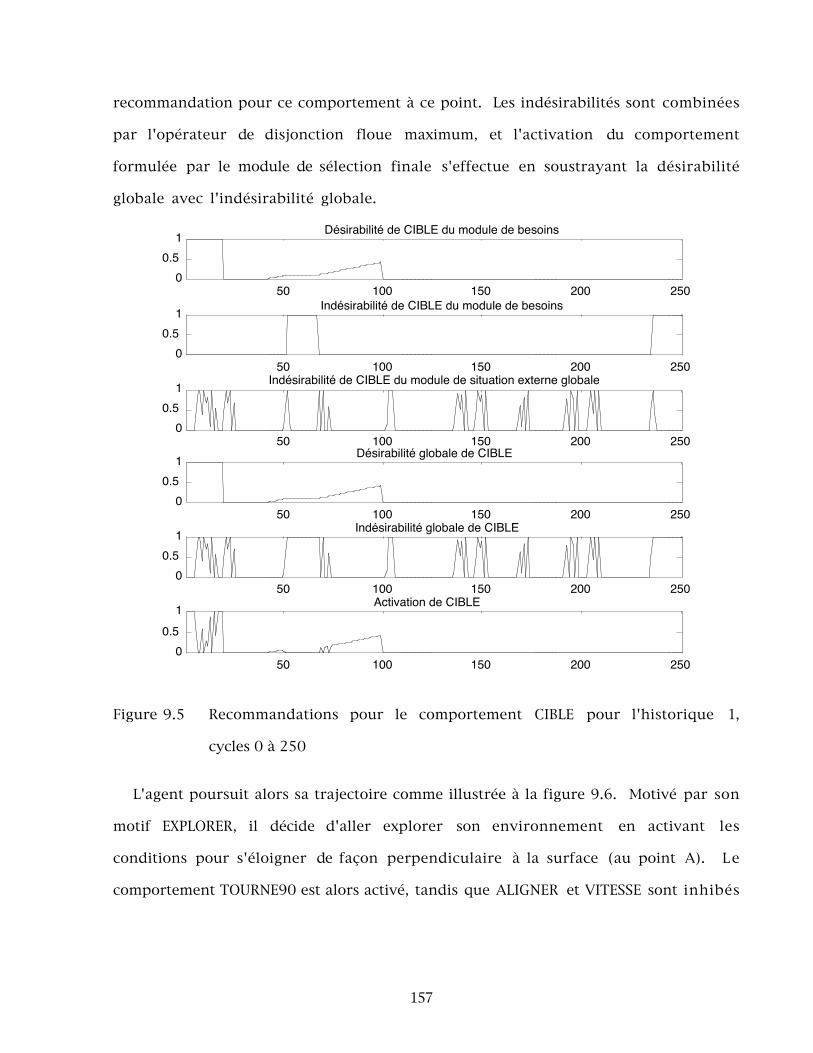
157
recommandation pour ce comportement à ce point. Les indésirabilités sont combinées
par l'opérateur de disjonction floue maximum, et l'activation du comportement
formulée par le module de sélection finale s'effectue en soustrayant la désirabilité
globale avec l'indésirabilité globale.
00.5
1
50 100 150 200 250
Désirabilité de CIBLE du module de besoins
00.5
1
50 100 150 200 250
Indésirabilité de CIBLE du module de besoins
00.5
1
50 100 150 200 250
Indésirabilité de CIBLE du module de situation externe globale
50 100 150 200 2500
0.51 Désirabilité globale de CIBLE
00.5
1
50 100 150 200 250
Indésirabilité globale de CIBLE
00.5
1
50 100 150 200 250
Activation de CIBLE
Figure 9.5 Recommandations pour le comportement CIBLE pour l'historique 1,
cycles 0 à 250
L'agent poursuit alors sa trajectoire comme illustrée à la figure 9.6. Motivé par son
motif EXPLORER, il décide d'aller explorer son environnement en activant les
conditions pour s'éloigner de façon perpendiculaire à la surface (au point A). Le
comportement TOURNE90 est alors activé, tandis que ALIGNER et VITESSE sont inhibés
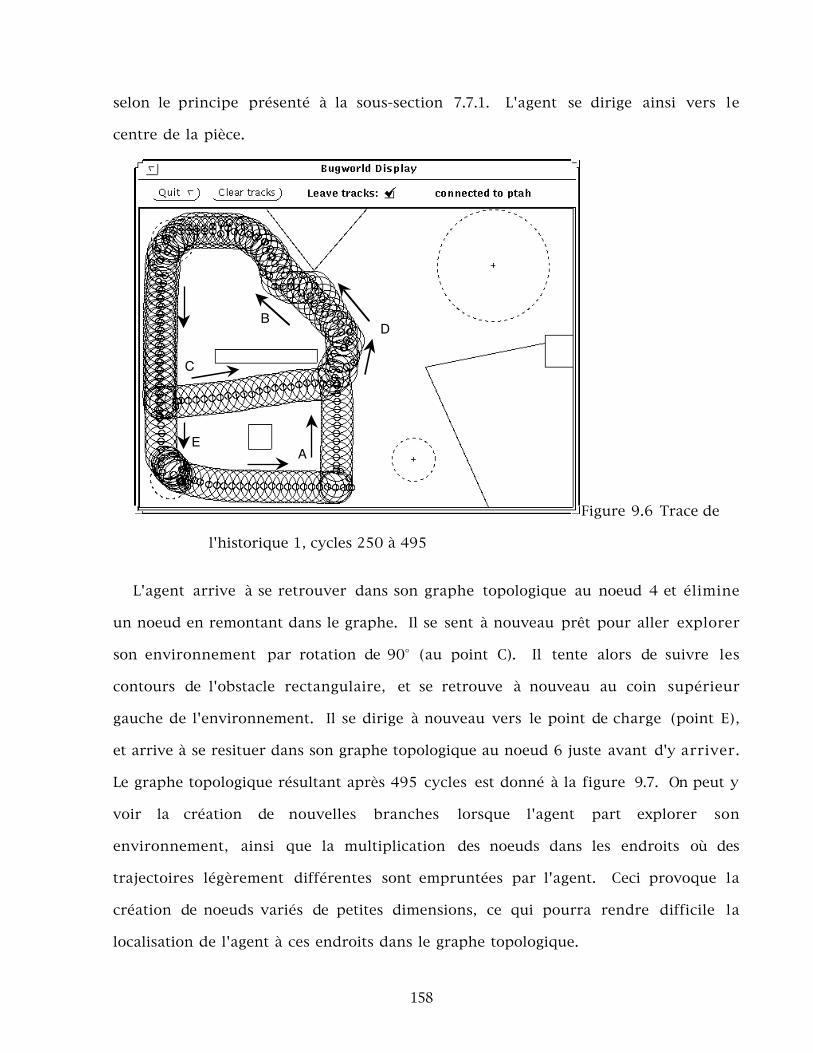
158
selon le principe présenté à la sous-section 7.7.1. L'agent se dirige ainsi vers le
centre de la pièce.
A
B
C
D
E
Figure 9.6 Trace de
l'historique 1, cycles 250 à 495
L'agent arrive à se retrouver dans son graphe topologique au noeud 4 et élimine
un noeud en remontant dans le graphe. Il se sent à nouveau prêt pour aller explorer
son environnement par rotation de 90° (au point C). Il tente alors de suivre les
contours de l'obstacle rectangulaire, et se retrouve à nouveau au coin supérieur
gauche de l'environnement. Il se dirige à nouveau vers le point de charge (point E),
et arrive à se resituer dans son graphe topologique au noeud 6 juste avant d'y arriver.
Le graphe topologique résultant après 495 cycles est donné à la figure 9.7. On peut y
voir la création de nouvelles branches lorsque l'agent part explorer son
environnement, ainsi que la multiplication des noeuds dans les endroits où des
trajectoires légèrement différentes sont empruntées par l'agent. Ceci provoque la
création de noeuds variés de petites dimensions, ce qui pourra rendre difficile la
localisation de l'agent à ces endroits dans le graphe topologique.
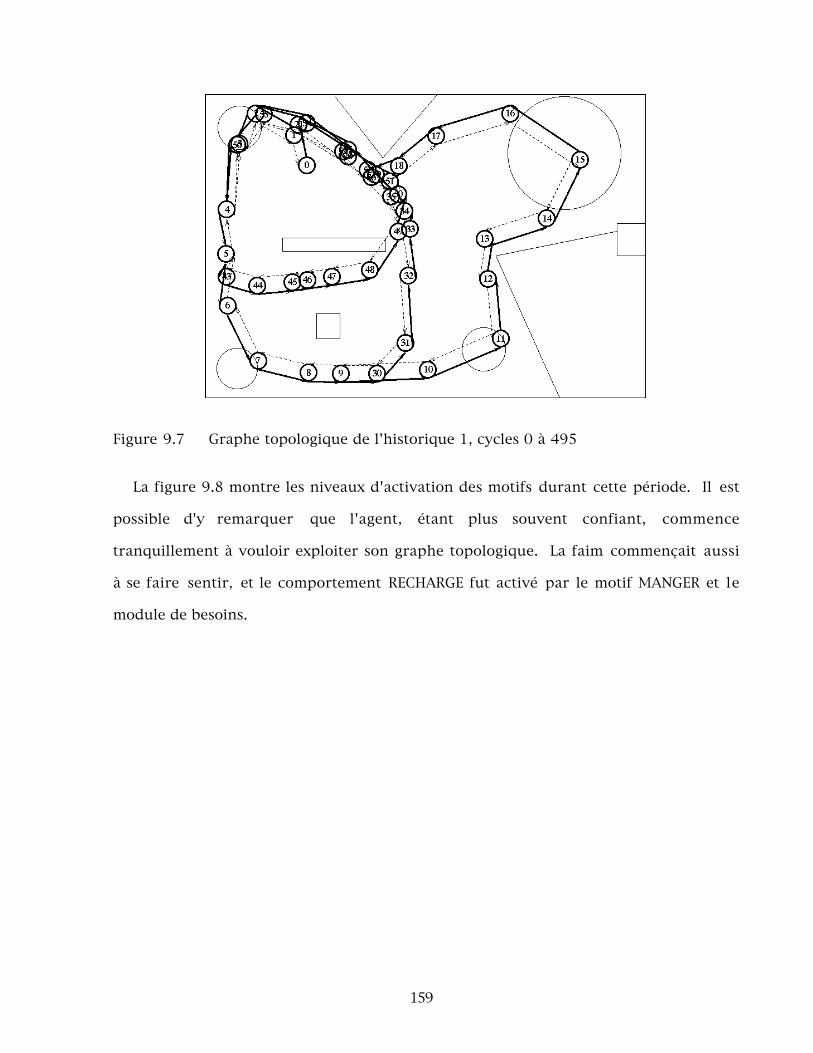
159
Figure 9.7 Graphe topologique de l'historique 1, cycles 0 à 495
La figure 9.8 montre les niveaux d'activation des motifs durant cette période. Il est
possible d'y remarquer que l'agent, étant plus souvent confiant, commence
tranquillement à vouloir exploiter son graphe topologique. La faim commençait aussi
à se faire sentir, et le comportement RECHARGE fut activé par le motif MANGER et le
module de besoins.

160
00.5
1
300 350 400 450
Motif FAIM
00.5
1
300 350 400 450
Motif JOIE
00.5
1
300 350 400 450
Motif CONFIANCE
00.5
1
300 350 400 450
Motif MANGER
00.5
1
300 350 400 450
Motif EXPLORER
00.5
1
300 350 400 450
Motif EXPLOITER
Figure 9.8 Motifs de l'historique 1, cycles 250 à 495
La figure 9.9 illustre les variations dans l'activation de comportements lors de ces
déplacements. On peut y remarquer la complémentarité entre l'activation de ÉVITER
et l'activation des comportements VITESSE et ALIGNER en fonction des règles de
recommandations du module de situation externe globale (voir figure 8.1). De plus, i l
est possible d'observer l'influence cognitive lors d'une rotation de 90° par
l'inhibition de VITESSE et de ALIGNER (ce dernier étant inhibé plus longtemps pour
laissé à l'agent le temps de s'éloigner de la surface).
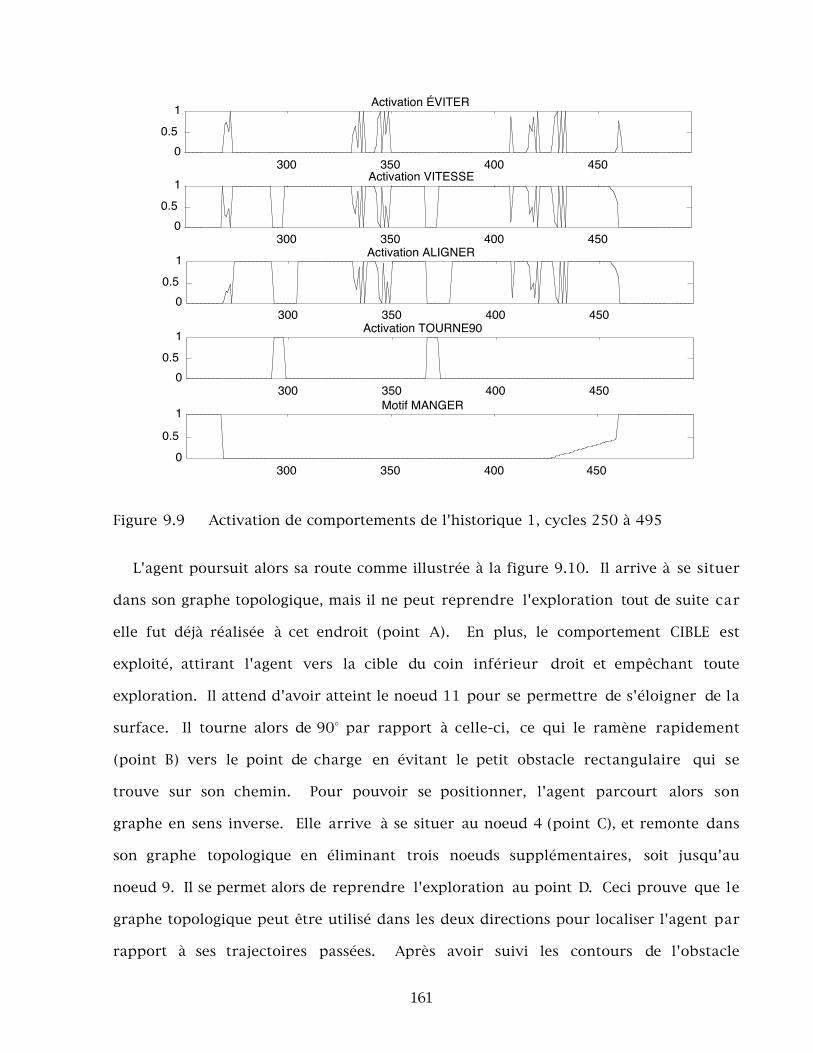
161
00.5
1
300 350 400 450
Activation ÉVITER
00.5
1
300 350 400 450
Activation VITESSE
00.5
1
300 350 400 450
Activation ALIGNER
00.5
1
300 350 400 450
Activation TOURNE90
00.5
1
300 350 400 450
Motif MANGER
Figure 9.9 Activation de comportements de l'historique 1, cycles 250 à 495
L'agent poursuit alors sa route comme illustrée à la figure 9.10. Il arrive à se situer
dans son graphe topologique, mais il ne peut reprendre l'exploration tout de suite car
elle fut déjà réalisée à cet endroit (point A). En plus, le comportement CIBLE est
exploité, attirant l'agent vers la cible du coin inférieur droit et empêchant toute
exploration. Il attend d'avoir atteint le noeud 11 pour se permettre de s'éloigner de la
surface. Il tourne alors de 90° par rapport à celle-ci, ce qui le ramène rapidement
(point B) vers le point de charge en évitant le petit obstacle rectangulaire qui se
trouve sur son chemin. Pour pouvoir se positionner, l'agent parcourt alors son
graphe en sens inverse. Elle arrive à se situer au noeud 4 (point C), et remonte dans
son graphe topologique en éliminant trois noeuds supplémentaires, soit jusqu'au
noeud 9. Il se permet alors de reprendre l'exploration au point D. Ceci prouve que le
graphe topologique peut être utilisé dans les deux directions pour localiser l'agent par
rapport à ses trajectoires passées. Après avoir suivi les contours de l'obstacle

162
horizontal rectangulaire, l'agent termine sa course au point de charge (point E). Le
graphe topologique résultant de la figure 9.11 illustre bien la capacité de l'agent de se
positionner dans son graphe malgré la grand nombre de branches représentant ses
nombreuses visites dans le coin supérieur gauche de l'environnement.
A
B
CD
E
Figure 9.10 Trace de l'historique 1, cycles 495 à 700

163
Figure 9.11 Graphe topologique de l'historique 1, cycles 0 à 700
L'agent continue ensuite son exploration de l'environnement à la recherche de
cibles. La figure 9.12 illustre la trajectoire empruntée par l'agent pour les cycles 700
à 900, et 900 à 1500. Le point de charge constitue le point de départ et le point d'arrêt
pour chacune de ces traces. Au point B, l'agent s'éloigne du coin pour se diriger vers
la cible. Il reprend l'exploration au point C, s'étant localisé sur une branche où
l'exploration ne fut pas encore réalisée malgré la trajectoire illustrée à la figure 9.10.
Au niveau du graphe topologique pour les 900 premiers cycles d'exécution de la
figure 9.13, il est intéressant de remarquer que la trajectoire de l'agent dans le coin
supérieur droit de l'environnement a donné lieu à une branche alternative pour
visiter cet endroit. L'agent arrive à se relocaliser dans le graphe au noeud 10, et
élimine les noeuds jusqu'au noeud 24 (qui présente une similitude valide avec le
noeud 6).
A
BC
D E,H,K
F
G IL
O
a) Cycles 700 à 900 b) Cycles 900 à 1500
MN
J
Figure 9.12 Traces de l'historique 1, cycles 700 à 900 et 900 à 1500
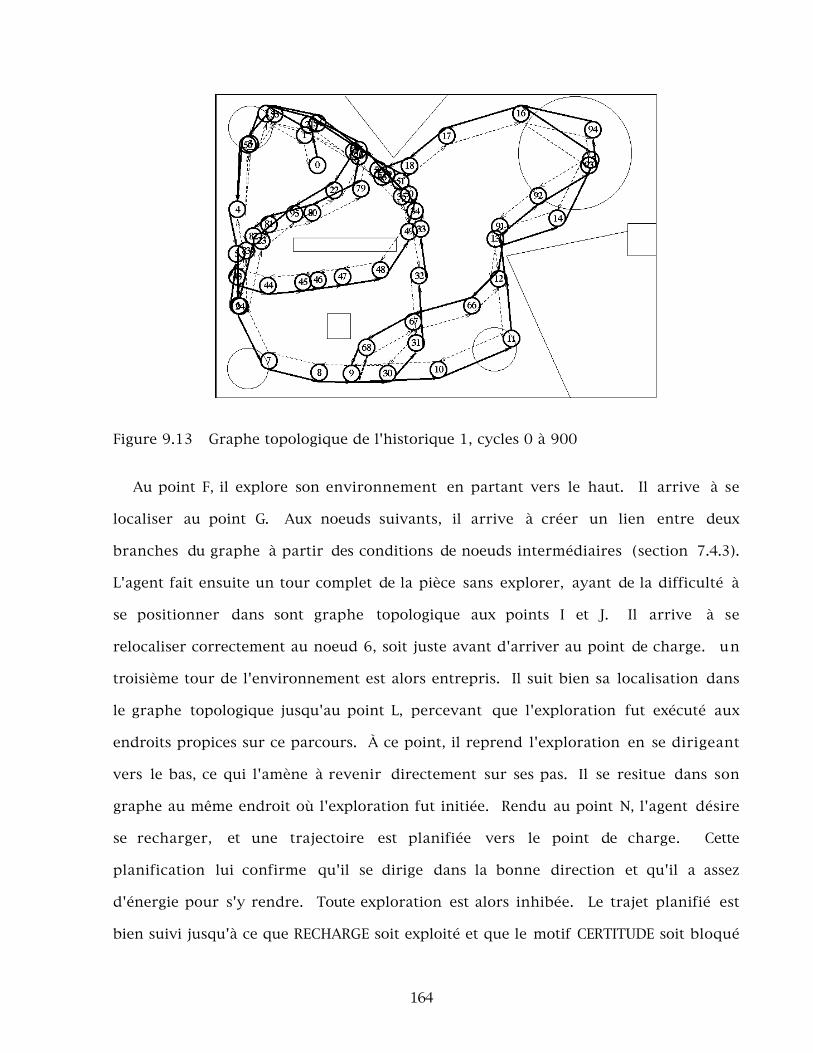
164
Figure 9.13 Graphe topologique de l'historique 1, cycles 0 à 900
Au point F, il explore son environnement en partant vers le haut. Il arrive à se
localiser au point G. Aux noeuds suivants, il arrive à créer un lien entre deux
branches du graphe à partir des conditions de noeuds intermédiaires (section 7.4.3).
L'agent fait ensuite un tour complet de la pièce sans explorer, ayant de la difficulté à
se positionner dans sont graphe topologique aux points I et J. Il arrive à se
relocaliser correctement au noeud 6, soit juste avant d'arriver au point de charge. un
troisième tour de l'environnement est alors entrepris. Il suit bien sa localisation dans
le graphe topologique jusqu'au point L, percevant que l'exploration fut exécuté aux
endroits propices sur ce parcours. À ce point, il reprend l'exploration en se dirigeant
vers le bas, ce qui l'amène à revenir directement sur ses pas. Il se resitue dans son
graphe au même endroit où l'exploration fut initiée. Rendu au point N, l'agent désire
se recharger, et une trajectoire est planifiée vers le point de charge. Cette
planification lui confirme qu'il se dirige dans la bonne direction et qu'il a assez
d'énergie pour s'y rendre. Toute exploration est alors inhibée. Le trajet planifié est
bien suivi jusqu'à ce que RECHARGE soit exploité et que le motif CERTITUDE soit bloqué

165
à 40%. L'agent arrive au point de charge sans difficulté. Cette situation peut mieux se
comprendre à partir de la figure 9.14 de motifs. À la figure 9.14, il est aussi possible de
remarquer que l'agent manifeste de plus en plus un désir d'exploiter son graphe
topologique, se sentant de plus en plus longtemps en confiance dans son
environnement.
00.5
1
600 800 1000 1200 1400 1600 1800
Motif FAIM
00.5
1
600 800 1000 1200 1400 1600 1800
Motif JOIE
00.5
1
600 800 1000 1200 1400 1600 1800
Motif CONFIANCE
00.5
1
600 800 1000 1200 1400 1600 1800
Motif CERTITUDE
00.5
1
600 800 1000 1200 1400 1600 1800
Motif MANGER
00.5
1
600 800 1000 1200 1400 1600 1800
Motif EXPLORER
00.5
1
600 800 1000 1200 1400 1600 1800
Motif EXPLOITER
Figure 9.14 Motifs de l'historique 1, cycles 500 à 1880
166
La figure 9.15 illustre la trajectoire suivie ensuite par l'agent pour les cycles 1500 à
1880. En partant, l'agent perd sa référence dans son graphe. À l'atteinte de la cible
du coin inférieur droit de la pièce, l'agent arrive à se resituer dans on graphe et le
niveau du motif JOIE (figure 9.14) devient tel que le comportement FOLIE est activé
par le module de besoins (voir figure 8.2). L'agent se met à tourner sur lui-même et se
trouve, une fois ce moment d'"énervement" terminé, orienté en direction du point de
charge. Ayant perdu sa référence dans le graphe, il arrive à s'y relocaliser juste
avant de rejoindre le point de charge. Il reprend l'exploration au point B qui l'amène
éventuellement à suivre une trajectoire au contour de la pièce. Il arrive alors à se
situer dans son graphe au point D, et attend jusqu'au point E pour reprendre
l'exploration. Il commence alors à tourner de 90°, mais en cours de rotation il ressent
un besoin pressant de MANGER. Ceci l'amène à se rediriger vers le point de charge
(point F). Durant cette période, la planification de trajectoire est bloquée car le
comportement RECHARGE est exploité. N'arrivant pas à se situer dans son graphe, ceci
évite en plus que l'agent pense incorrectement qu'il doit faire demi-tour, pour qu'il
soit guidé plutôt par son comportement localisant les points de charge.
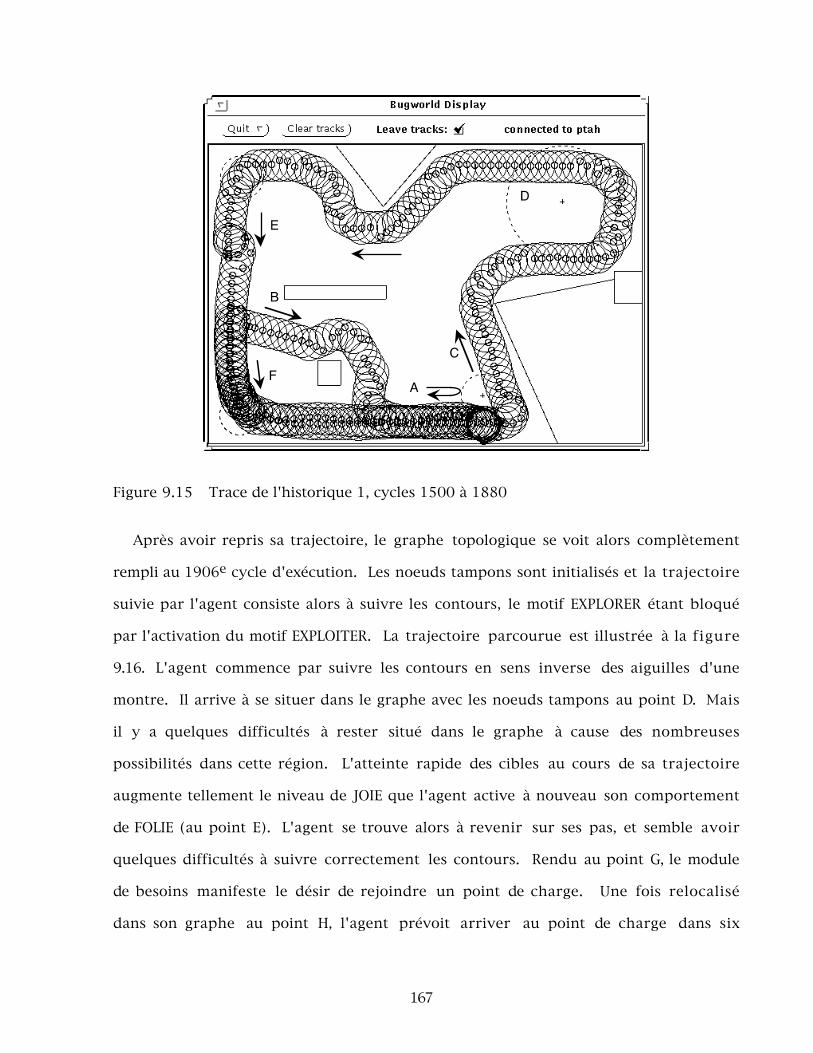
167
A
B
C
D
E
F
Figure 9.15 Trace de l'historique 1, cycles 1500 à 1880
Après avoir repris sa trajectoire, le graphe topologique se voit alors complètement
rempli au 1906e cycle d'exécution. Les noeuds tampons sont initialisés et la trajectoire
suivie par l'agent consiste alors à suivre les contours, le motif EXPLORER étant bloqué
par l'activation du motif EXPLOITER. La trajectoire parcourue est illustrée à la figure
9.16. L'agent commence par suivre les contours en sens inverse des aiguilles d'une
montre. Il arrive à se situer dans le graphe avec les noeuds tampons au point D. Mais
il y a quelques difficultés à rester situé dans le graphe à cause des nombreuses
possibilités dans cette région. L'atteinte rapide des cibles au cours de sa trajectoire
augmente tellement le niveau de JOIE que l'agent active à nouveau son comportement
de FOLIE (au point E). L'agent se trouve alors à revenir sur ses pas, et semble avoir
quelques difficultés à suivre correctement les contours. Rendu au point G, le module
de besoins manifeste le désir de rejoindre un point de charge. Une fois relocalisé
dans son graphe au point H, l'agent prévoit arriver au point de charge dans six

168
noeuds en continuant dans la même direction. Toutefois, il anticipe que la distance le
séparant du point de charge est de 56 cycles, et il ne lui reste alors que 23 cycles
d'énergie. Le module de cognition émet alors un S.O.S. en activant de façon répétitive
le comportement ALARME. Pour empirer davantage la situation, l'agent a de la
difficulté à tourner le coin au point H. Il se dirige alors directement vers le centre du
coin inférieur droit de l'environnement (point J) où il termine sa course, manque
d'énergie.
A
B
C
DE
F
G
H
I
J
Figure 9.16 Trace de l'historique 1, cycles 1880 à 2146
Le graphe topologique résultant est illustré à la figure 9.17. N'ayant pu se rendre
au point de charge après avoir inhibé le motif EXPLORER par le motif EXPLOITER,
l'agent n'a pu optimiser son graphe topologique pour en éliminer les noeuds jugés
inutiles. Si une telle opération avait pu être effectuée, le graphe topologique
résultant aurait été celui présenté à la figure 9.18. Un total de 55 noeuds sont éliminés
suite à cette optimisation, de laquelle émerge plusieurs effets. Premièrement, les
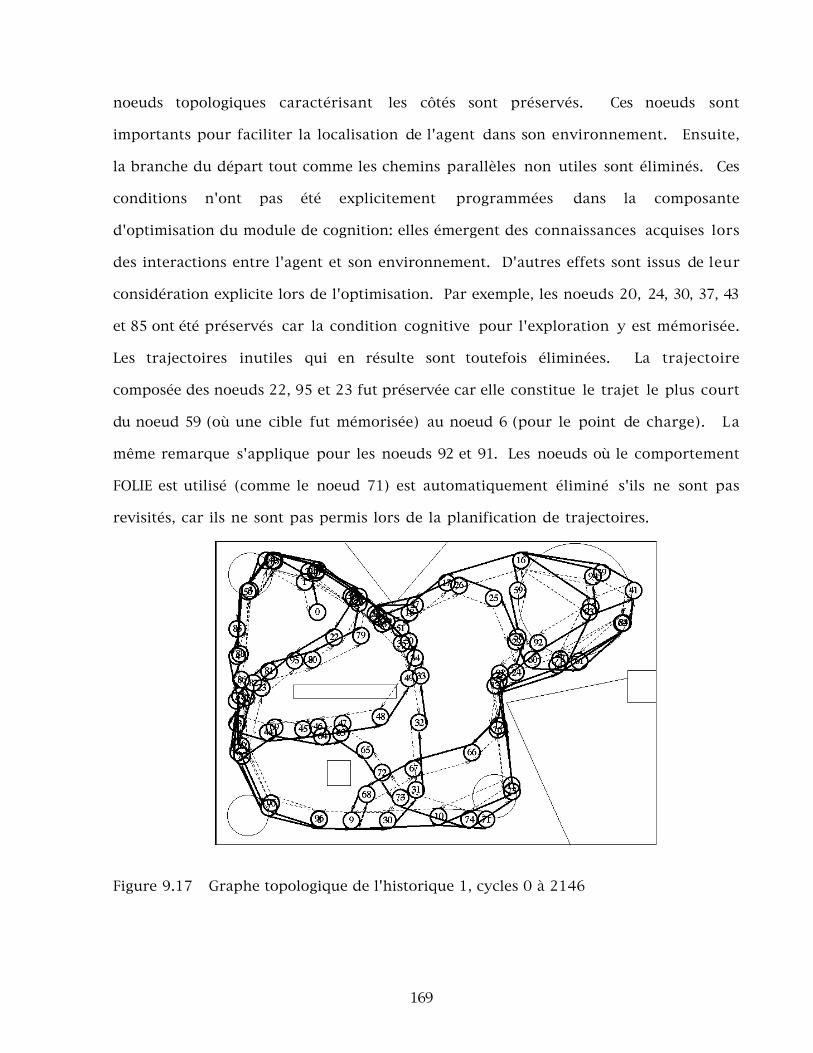
169
noeuds topologiques caractérisant les côtés sont préservés. Ces noeuds sont
importants pour faciliter la localisation de l'agent dans son environnement. Ensuite,
la branche du départ tout comme les chemins parallèles non utiles sont éliminés. Ces
conditions n'ont pas été explicitement programmées dans la composante
d'optimisation du module de cognition: elles émergent des connaissances acquises lors
des interactions entre l'agent et son environnement. D'autres effets sont issus de leur
considération explicite lors de l'optimisation. Par exemple, les noeuds 20, 24, 30, 37, 43
et 85 ont été préservés car la condition cognitive pour l'exploration y est mémorisée.
Les trajectoires inutiles qui en résulte sont toutefois éliminées. La trajectoire
composée des noeuds 22, 95 et 23 fut préservée car elle constitue le trajet le plus court
du noeud 59 (où une cible fut mémorisée) au noeud 6 (pour le point de charge). La
même remarque s'applique pour les noeuds 92 et 91. Les noeuds où le comportement
FOLIE est utilisé (comme le noeud 71) est automatiquement éliminé s'ils ne sont pas
revisités, car ils ne sont pas permis lors de la planification de trajectoires.
Figure 9.17 Graphe topologique de l'historique 1, cycles 0 à 2146

170
Figure 9.18 Graphe topologique optimisé de l'historique 1
Une seconde expérimentation fut réalisée avec le même point de départ dans cet
environnement, mais en augmentant le nombre de noeuds disponibles dans le graphe
topologique à 150 au lieu de 100. La trajectoire empruntée par l'agent diffère alors à
partir du 1906e cycle car le graphe topologique n'est pas alors complètement rempli.
La figure 9.19 illustre la trajectoire de l'agent pour les cycles 1880 à 2400, et 2400 à
2720. Au point B, il reprend l'exploration et arrive à se resituer par rapport à une
exploration similaire exécutée au point F de la figure 9.12. L'exploration avait alors
débutée du noeud 13 au lieu du noeud 91. L'agent fait ensuite deux tours de la pièce
sans explorer, arrivant relativement bien à se localiser dans son graphe et croyant
avoir tout exploré les endroits possibles. Mais rendu au 2397e cycle, l'intégration du
niveau de CONFIANCE par le motif EXPLOITER est telle que l'agent décide de cesser
l'exploration pour plutôt exploiter son graphe topologique. Les noeuds tampons
servent alors pour le positionnement dans le graphe topologique. La figure 9.20
illustre l'activation des motifs de l'agent pour les cycles 1880 à 2720.

171
a) Cycles 1880 à 2397 b) Cycles 2397 à 2720
A,D,G
BC,F
E
HJ
KL,Q
M
NO
R
P
Figure 9.19 Traces de l'historique 1, cycles 1880 à 2720, avec 150 noeuds disponibles
pour le graphe topologique

172
00.5
1
1900 2000 2100 2200 2300 2400 2500 2600 2700
Motif FAIM
00.5
1
1900 2000 2100 2200 2300 2400 2500 2600 2700
Motif DÉTRESSE
00.5
1
1900 2000 2100 2200 2300 2400 2500 2600 2700
Motif JOIE
00.5
1
1900 2000 2100 2200 2300 2400 2500 2600 2700
Motif CONFIANCE
00.5
1
1900 2000 2100 2200 2300 2400 2500 2600 2700
Motif CERTITUDE
00.5
1
1900 2000 2100 2200 2300 2400 2500 2600 2700
Motif ENNUI
00.5
1
1900 2000 2100 2200 2300 2400 2500 2600 2700
Motif MANGER
00.5
1
1900 2000 2100 2200 2300 2400 2500 2600 2700
Motif EXPLORER
00.5
1
1900 2000 2100 2200 2300 2400 2500 2600 2700
Motif EXPLOITER
Figure 9.20 Motifs de l'historique 1, cycles 1880 à 2720 et avec 150 noeuds disponibles
pour le graphe topologique

173
L'optimisation du graphe s'effectue au point K, soit lors de la recharge de l'agent.
Les figures 9.21 et 9.22!illustrent les graphes topologiques avant et après
optimisation. Un total de 51 noeuds furent éliminés lors de l'optimisation. Par rapport
à la figure 9.18, seuls les noeuds 94 et les noeuds 112 à 115 s'ajoutent au graphe
optimisé car ils ont servi à localiser l'agent dans son graphe topologique lors de
l'exploration.
Figure 9.21 Graphe topologique de l'historique 1, cycles 0 à 2397, et 150 noeuds
disponibles pour le graphe topologique

174
Figure 9.22 Graphe topologique optimisé de l'historique 1 et 150 noeuds disponibles
pour le graphe topologique
Au cours des cycles 2397 à 2720 (voir figure 9.19 b), l'agent continue à suivre les
contours. Au point M, il se sent attiré vers la cible et reprend son chemin en
retournant sur ses pas (point O). C'est alors qu'il reste pris au point P. Il arrive
toutefois à se déprendre en utilisant DÉGAGE de par la règle du module de besoins et du
motif DÉTRESSE (excité par une constance dans l'exploitation des comportements
URGENCE et ÉVITER). Il se doit alors de retourner vers le point de charge comme le
confirment les motifs MANGER et FAIM, mais il se trouve alors orienté dans la
mauvaise direction. Au même moment, l'incapacité d'exploiter son graphe
topologique activa suffisamment le motif ENNUI pour permettre à l'agent de
reprendre l'exploration et d'initialiser des nouveaux noeuds dans le graphe. Mais i l
était trop tard, et le module de cognition émit un S.O.S. lors des derniers dix cycles
d'énergie de l'agent.
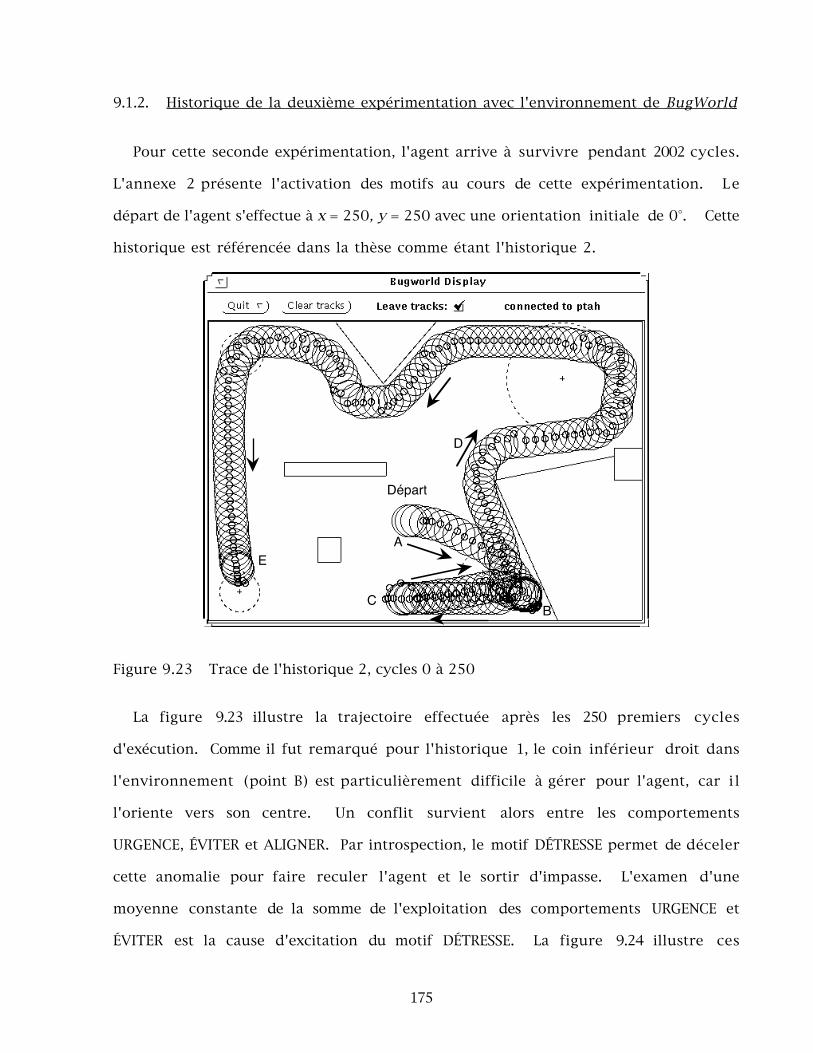
175
9.1.2. Historique de la deuxième expérimentation avec l'environnement de BugWorld
Pour cette seconde expérimentation, l'agent arrive à survivre pendant 2002 cycles.
L'annexe 2 présente l'activation des motifs au cours de cette expérimentation. Le
départ de l'agent s'effectue à x = 250, y = 250 avec une orientation initiale de 0°. Cette
historique est référencée dans la thèse comme étant l'historique 2.
A
BC
D
E
Départ
Figure 9.23 Trace de l'historique 2, cycles 0 à 250
La figure 9.23 illustre la trajectoire effectuée après les 250 premiers cycles
d'exécution. Comme il fut remarqué pour l'historique 1, le coin inférieur droit dans
l'environnement (point B) est particulièrement difficile à gérer pour l'agent, car i l
l'oriente vers son centre. Un conflit survient alors entre les comportements
URGENCE, ÉVITER et ALIGNER. Par introspection, le motif DÉTRESSE permet de déceler
cette anomalie pour faire reculer l'agent et le sortir d'impasse. L'examen d'une
moyenne constante de la somme de l'exploitation des comportements URGENCE et
ÉVITER est la cause d'excitation du motif DÉTRESSE. La figure 9.24 illustre ces
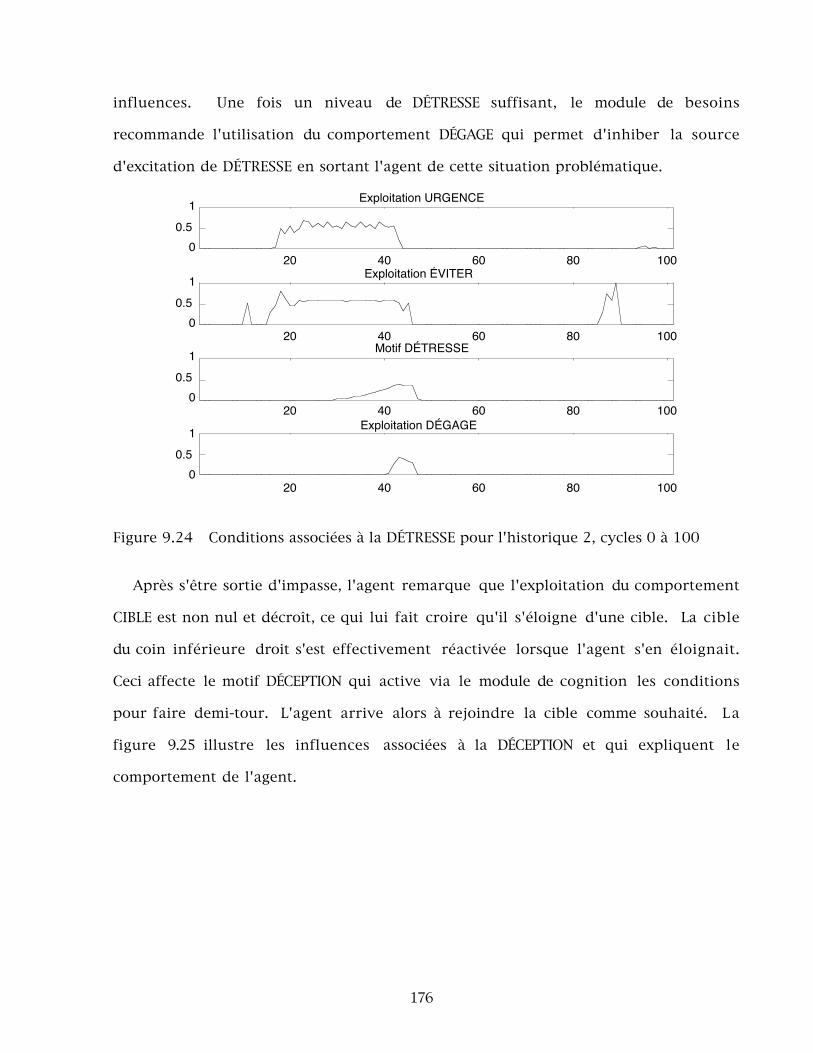
176
influences. Une fois un niveau de DÉTRESSE suffisant, le module de besoins
recommande l'utilisation du comportement DÉGAGE qui permet d'inhiber la source
d'excitation de DÉTRESSE en sortant l'agent de cette situation problématique.
00.5
1
20 40 60 80 100
Motif DÉTRESSE
00.5
1
20 40 60 80 100
Exploitation URGENCE
00.5
1
20 40 60 80 100
Exploitation ÉVITER
00.5
1
20 40 60 80 100
Exploitation DÉGAGE
Figure 9.24 Conditions associées à la DÉTRESSE pour l'historique 2, cycles 0 à 100
Après s'être sortie d'impasse, l'agent remarque que l'exploitation du comportement
CIBLE est non nul et décroît, ce qui lui fait croire qu'il s'éloigne d'une cible. La cible
du coin inférieure droit s'est effectivement réactivée lorsque l'agent s'en éloignait.
Ceci affecte le motif DÉCEPTION qui active via le module de cognition les conditions
pour faire demi-tour. L'agent arrive alors à rejoindre la cible comme souhaité. La
figure 9.25 illustre les influences associées à la DÉCEPTION et qui expliquent le
comportement de l'agent.

177
00.5
1
20 40 60 80 100
Motif DÉCEPTION
00.5
1
20 40 60 80 100
Activation CIBLE
00.5
1
20 40 60 80 100
Exploitation TOURNE180
00.05
0.1
20 40 60 80 100
Exploitation CIBLE
Figure 9.25 Conditions associées à la DÉCEPTION pour l'historique 2, cycles 0 à 100
L'agent reprend sa course en suivant les contours. Mais il arrive juste à temps au
point de charge, car il ne lui reste que quatre cycles d'énergie à son arrivée au point
de charge. Le S.O.S. fut émit pour signifier son manque d'énergie probable lorsqu'il
ne lui restait que pour dix cycles d'énergie. Aucune trajectoire n'a pu être planifiée,
la seule branche du graphe topologique enregistrant des conditions de détresse et de
demi-tour. Le graphe topologique résultant est présenté à la figure 9.26. On
remarque que malgré la difficulté de se sortir du coin au point B, le nombre de noeuds
topologiques n'a pas augmenté dramatiquement. Les noeuds topologiques construits
reflètent bien ce qui fut perceptible pour l'agent. Aucune recherche ne fut faite à ce
point pour localiser l'agent dans son graphe, l'agent ne croyant pas avoir rencontré
la condition de rotation sur 360°.

178
Figure 9.26 Graphe topologique de l'historique 2, cycles 0 à 250
L'agent poursuit sa route telle qu'illustrée à la figure 9.27. La recherche dans son
graphe débute après son départ du point de charge, mais il arrive à s'y situer qu'au
358e cycle (point B, noeud 12) à cause de ses difficultés précédentes dans cette zone.
Mais le noeud suivant ne peut être identifié à la suite du noeud 12 dans le graphe
topologique. Toutefois, le module de cognition arrive à détecter une similitude avec
un noeud intermédiaire au noeud 14. La même situation se répète entre le noeud 14 et
le noeud 16, et pour plusieurs des noeuds suivants. De plus, juste avant d'arriver au
point de charge (soit avant le 457e cycle), le niveau de JOIE est tel que FOLIE est activé
(point C noeud 43), faisant perdre à l'agent sa position par rapport à la trajectoire
passée dans son graphe topologique. Mais encore une fois l'agent se retrouve dans
son graphe topologique à partir de recherche avec noeud intermédiaire, car il reprit
alors son chemin dans le sens où les noeuds du graphe furent construits. Le graphe
topologique de la figure 9.28 montre bien les noeuds intermédiaires résultants de ces
opérations, soit les noeuds 35, 37, 39, 41 et 43. Enfin, avant d'arriver au point de

179
charge, l'agent n'arrive plus à trouver une similitude avec un des noeuds liés au
noeud 23, et une nouvelle branche s'initialise (noeud 46).
D
BC
A
EF
G
H
a) Cycles 250 à 490 b) Cycles 490 à 700
Figure 9.27 Traces de l'historique 2, cycles 250 à 490 et cycles 490 à 700
Figure 9.28 Graphe topologique de l'historique 2, cycles 0 à 700
L'agent arrive à se rebrancher dans son graphe topologique au mur du bas de
l'environnement (noeud 28), juste à son arrivée à la cible du coin inférieur droit. I l
entreprend alors l'exploration de son environnement au point E, ce qui redirige
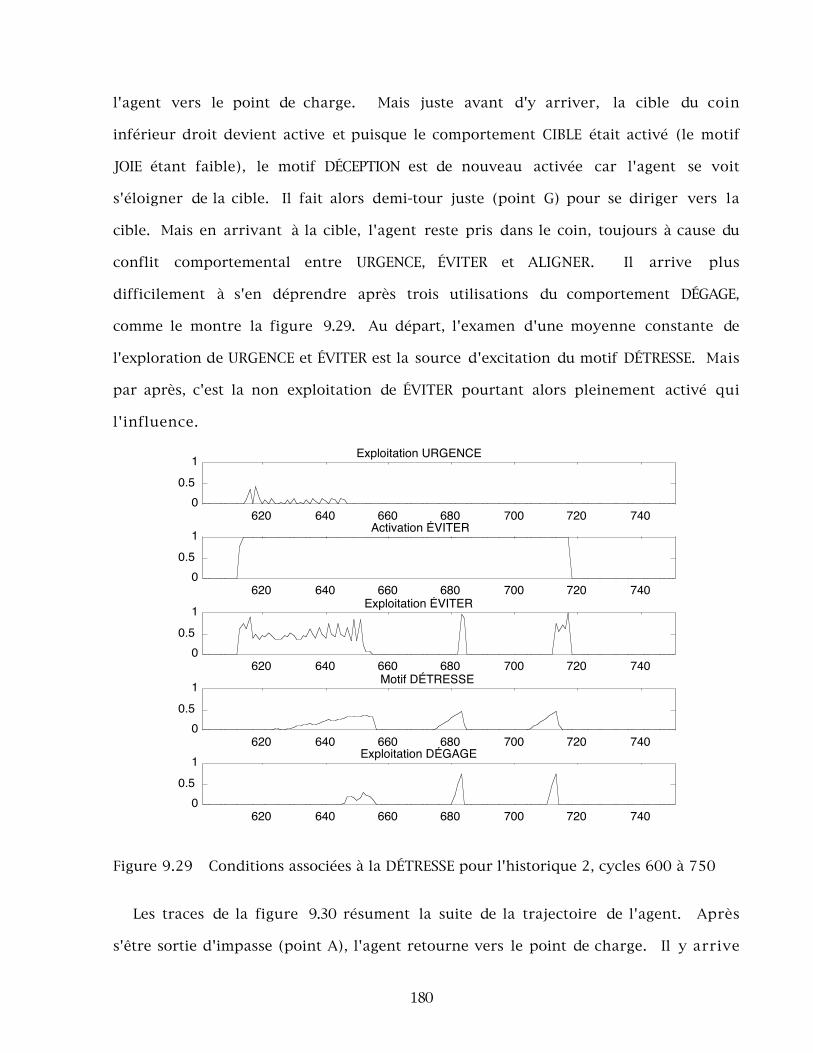
180
l'agent vers le point de charge. Mais juste avant d'y arriver, la cible du coin
inférieur droit devient active et puisque le comportement CIBLE était activé (le motif
JOIE étant faible), le motif DÉCEPTION est de nouveau activée car l'agent se voit
s'éloigner de la cible. Il fait alors demi-tour juste (point G) pour se diriger vers la
cible. Mais en arrivant à la cible, l'agent reste pris dans le coin, toujours à cause du
conflit comportemental entre URGENCE, ÉVITER et ALIGNER. Il arrive plus
difficilement à s'en déprendre après trois utilisations du comportement DÉGAGE,
comme le montre la figure 9.29. Au départ, l'examen d'une moyenne constante de
l'exploration de URGENCE et ÉVITER est la source d'excitation du motif DÉTRESSE. Mais
par après, c'est la non exploitation de ÉVITER pourtant alors pleinement activé qui
l'influence.
00.5
1
620 640 660 680 700 720 740
Motif DÉTRESSE
00.5
1
620 640 660 680 700 720 740
Activation ÉVITER
00.5
1
620 640 660 680 700 720 740
Exploitation URGENCE
00.5
1
620 640 660 680 700 720 740
Exploitation ÉVITER
00.5
1
620 640 660 680 700 720 740
Exploitation DÉGAGE
Figure 9.29 Conditions associées à la DÉTRESSE pour l'historique 2, cycles 600 à 750
Les traces de la figure 9.30 résument la suite de la trajectoire de l'agent. Après
s'être sortie d'impasse (point A), l'agent retourne vers le point de charge. Il y arrive
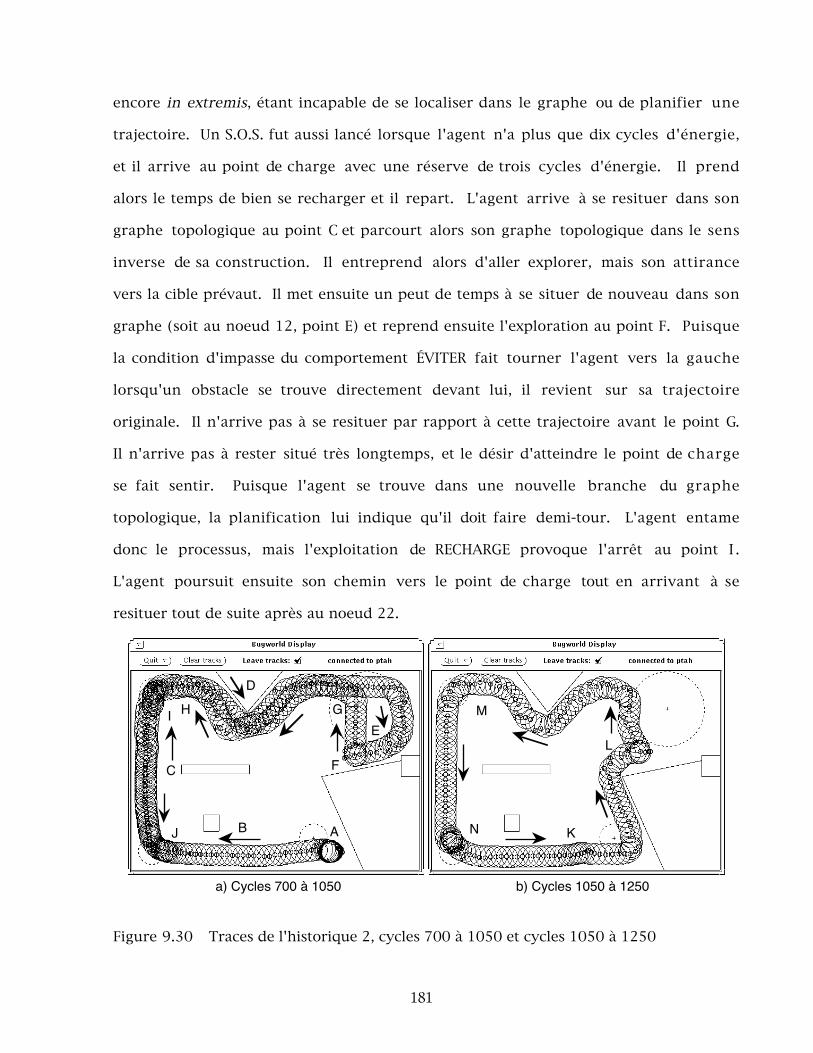
181
encore in extremis, étant incapable de se localiser dans le graphe ou de planifier une
trajectoire. Un S.O.S. fut aussi lancé lorsque l'agent n'a plus que dix cycles d'énergie,
et il arrive au point de charge avec une réserve de trois cycles d'énergie. Il prend
alors le temps de bien se recharger et il repart. L'agent arrive à se resituer dans son
graphe topologique au point C et parcourt alors son graphe topologique dans le sens
inverse de sa construction. Il entreprend alors d'aller explorer, mais son attirance
vers la cible prévaut. Il met ensuite un peut de temps à se situer de nouveau dans son
graphe (soit au noeud 12, point E) et reprend ensuite l'exploration au point F. Puisque
la condition d'impasse du comportement ÉVITER fait tourner l'agent vers la gauche
lorsqu'un obstacle se trouve directement devant lui, il revient sur sa trajectoire
originale. Il n'arrive pas à se resituer par rapport à cette trajectoire avant le point G.
Il n'arrive pas à rester situé très longtemps, et le désir d'atteindre le point de charge
se fait sentir. Puisque l'agent se trouve dans une nouvelle branche du graphe
topologique, la planification lui indique qu'il doit faire demi-tour. L'agent entame
donc le processus, mais l'exploitation de RECHARGE provoque l'arrêt au point I .
L'agent poursuit ensuite son chemin vers le point de charge tout en arrivant à se
resituer tout de suite après au noeud 22.
AB
C
D
E
F
J
H
K
L
M
N
a) Cycles 700 à 1050 b) Cycles 1050 à 1250
GI
Figure 9.30 Traces de l'historique 2, cycles 700 à 1050 et cycles 1050 à 1250

182
Au cours des cycles 1050 à 1250, l'agent désire toujours explorer son
environnement. Juste avant d'atteindre la cible du coin inférieur droit (point K), i l
décide de tourne de 90°. Mais au même moment, le niveau de JOIE est jugé et le module
de besoins active le comportement CIBLE. La cible du coin inférieur droit étant active,
le comportement CIBLE est alors exploité, ce qui annule la recommandation cognitive
formulée par EXPLORER pour tourner de 90°. L'agent poursuit toutefois sa route et
reprend l'exploration un peu plus tard au point L. Il se relocalise dans son graphe au
point M, mais perd ensuite cette référence. Il arrive à se resituer au point N, arrivant
à éliminer les noeuds créés entre ces deux endroits et en créant un nouveau lien
entre deux branches au point M.
L'exploration de l'environnement se poursuit en fonction de la capacité de l'agent
de se situer dans son environnement par rapport à son graphe topologique. La figure
9.31 illustre le parcours de l'agent pour les cycles 1050 à 1750. Au 1344e cycle, l'agent
se trouve à nouveau en condition critique (point C, dictée par la constance de la
moyenne de l'exploitation de URGENCE et ÉVITER), mais arrive à s'en déprendre
rapidement. Il retourne ensuite au point de charge en tournant de 90° au point D,
motivé par son désir d'exploration. Le motif DÉCEPTION fut excité à cause de la cible du
coin supérieur droit, mais sans conséquence sur la trajectoire de l'agent.
a) Cycles 1250 à 1450 b) Cycles 1450 à 1750
A
B
C
D
E F
G
HIJ
K

183
Figure 9.31 Traces de l'historique 2, cycles 1250 à 1450 et cycles 1450 à 1750
Une fois rechargé, l'agent poursuit sa route en explorant au point H, les autres
endroits ayant déjà été explorés. La séquence de noeuds au point H est alors
considérée incorrectement somme similaire à la séquence de noeuds construits au
point G de la figure 9.30 a). Mais l'agent ne prend pas beaucoup de temps à
comprendre qu'il ne peut arriver à bien se localiser dans son graphe à ce point, et
une nouvelle branche est construite. Il arrive à se relocaliser correctement au point
I. Juste avant d'arriver au point J, l'agent perd la référence dans son graphe, et le
désir de manger se fait encore sentir. Par planification, l'agent décide de faire demi-
tour. Mais comme pour le cas de la figure 9.30 b), le comportement de RECHARGE est
alors exploité, inhibant la condition demandant de faire demi-tour pour permettre à
l'agent de se diriger vers le point de charge. Une légère augmentation du motif
DÉCEPTION reflète aussi l'influence de l'exploitation de ce comportement à ce point.
La figure 9.32 résume le parcours de l'agent sur ses derniers cycles d'existence.
L'agent reprend sa route du point de charge et arrive encore à se prendre au coin
inférieur droit (point B) sans avoir pu prévenir la situation (le noeud où survient la
détresse est un noeud de transition, donc ne pouvant pas être anticipé). Il arrive à
nouveau à s'en dégager et reprend son chemin, explore à nouveau la boucle du point
C car il se trouve situé à un noeud où l'exploration ne fut pas mémorisée. La rotation
effectuée n'est pas tout à fait de 90°: la position de départ et les actions formulées
auraient nécessité un peu plus de temps pour ajuster la position de l'agent avant qu'il
s'éloigne de la surface. Le comportement de RECHARGE est recommandé par le module
de besoins au point C, mais aucune trajet n'est accepté lors de la planification. L'agent
arrive à se resituer au point D, mais le noeud 16 faisant partie de la similitude établie
n'a plus de lien libre pour que le branchement se réalise. En plus, au noeud suivant,
le graphe topologique se voit complètement rempli. Quand l'agent arrive à se

184
repositionner à partir des noeuds tampons, il est rendu au point G. La trajectoire alors
planifiée lui indique qui lui manquera pour un cycle d'énergie, ce qui active
l'émission du S.O.S. L'agent manque d'énergie juste avant d'atteindre le point de
charge.
A
B
C
E
F
F
D
G
Figure 9.32 Trace de l'historique 2, cycles 1750 à 2002
Le graphe topologique final construit par l'agent est présenté à la figure 9.33. I l
est possible d'y remarquer la densité importante de noeuds créés dans les différents
coins de l'environnement, démontrant les problèmes rencontrés par l'agent et sa
difficulté de s'y resituer. Il est aussi possible de remarquer que la mauvaise similitude
identifiée dans le graphe topologique, donnant lieu à un lien erroné entre le noeud 74
et le noeud 85. La similitude fut établie par sens inverse, comme le démontre le lien
pointillé (lien de type bivalent) en gras (lien de type Vers) entre ces deux noeuds.
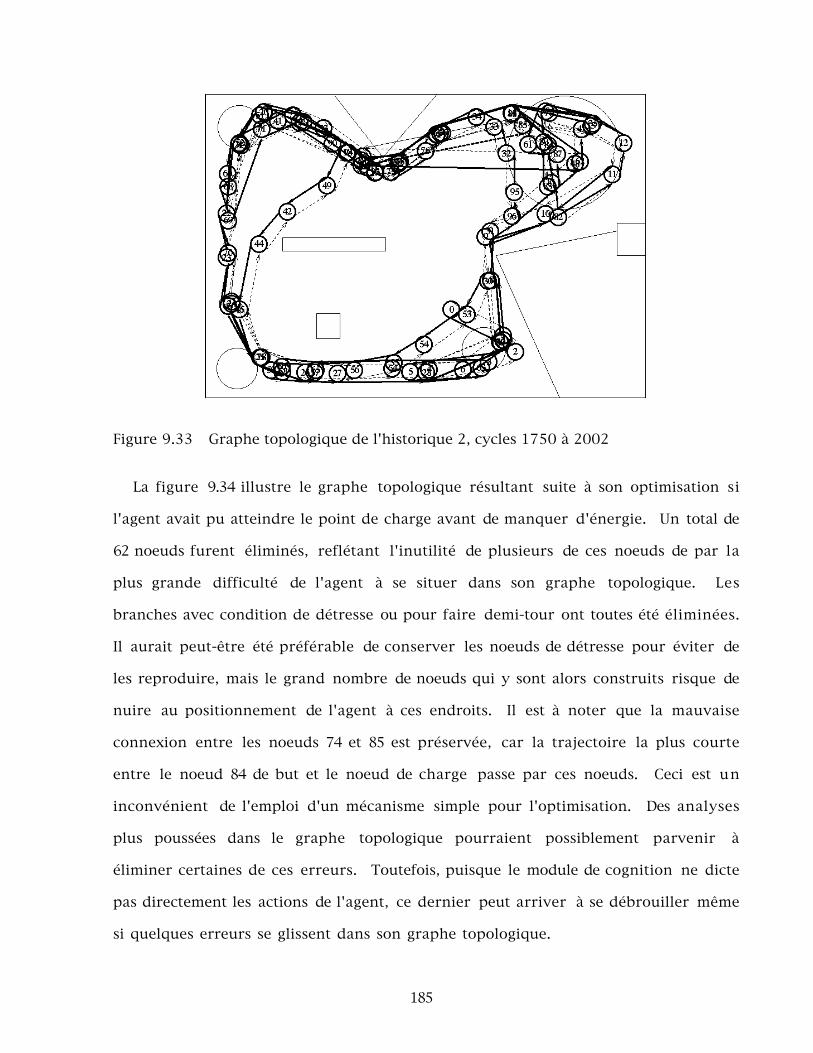
185
Figure 9.33 Graphe topologique de l'historique 2, cycles 1750 à 2002
La figure 9.34 illustre le graphe topologique résultant suite à son optimisation si
l'agent avait pu atteindre le point de charge avant de manquer d'énergie. Un total de
62 noeuds furent éliminés, reflétant l'inutilité de plusieurs de ces noeuds de par la
plus grande difficulté de l'agent à se situer dans son graphe topologique. Les
branches avec condition de détresse ou pour faire demi-tour ont toutes été éliminées.
Il aurait peut-être été préférable de conserver les noeuds de détresse pour éviter de
les reproduire, mais le grand nombre de noeuds qui y sont alors construits risque de
nuire au positionnement de l'agent à ces endroits. Il est à noter que la mauvaise
connexion entre les noeuds 74 et 85 est préservée, car la trajectoire la plus courte
entre le noeud 84 de but et le noeud de charge passe par ces noeuds. Ceci est un
inconvénient de l'emploi d'un mécanisme simple pour l'optimisation. Des analyses
plus poussées dans le graphe topologique pourraient possiblement parvenir à
éliminer certaines de ces erreurs. Toutefois, puisque le module de cognition ne dicte
pas directement les actions de l'agent, ce dernier peut arriver à se débrouiller même
si quelques erreurs se glissent dans son graphe topologique.
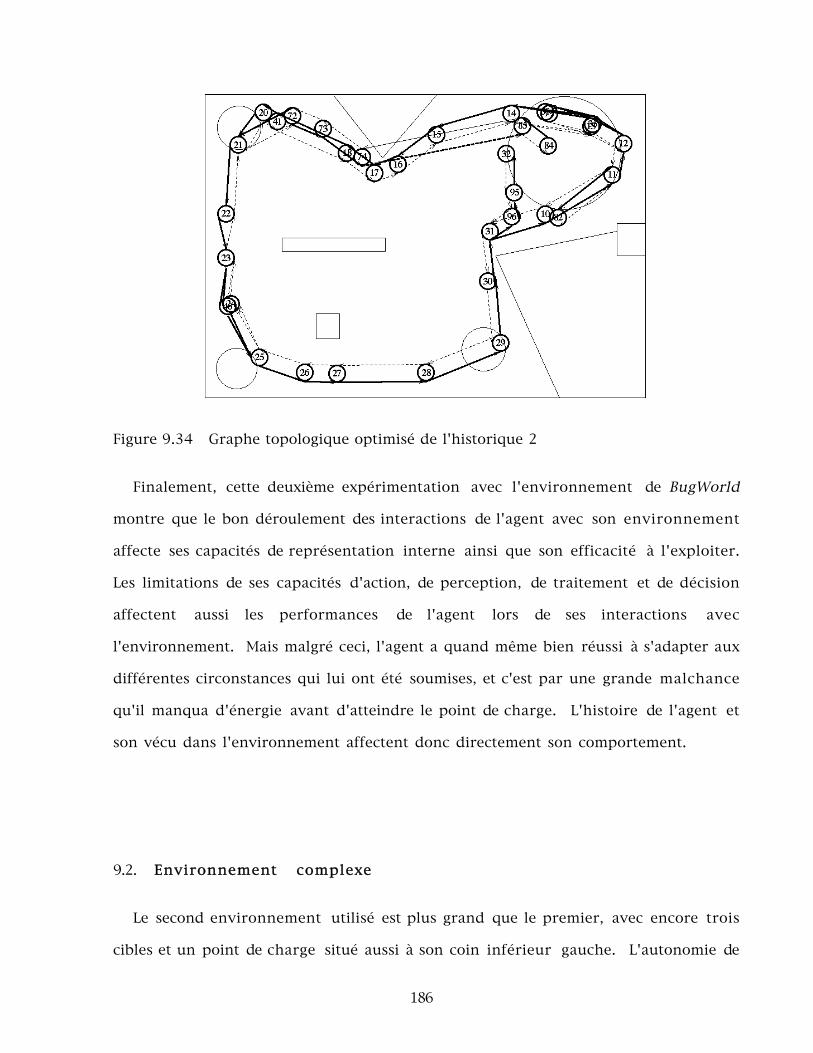
186
Figure 9.34 Graphe topologique optimisé de l'historique 2
Finalement, cette deuxième expérimentation avec l'environnement de BugWorld
montre que le bon déroulement des interactions de l'agent avec son environnement
affecte ses capacités de représentation interne ainsi que son efficacité à l'exploiter.
Les limitations de ses capacités d'action, de perception, de traitement et de décision
affectent aussi les performances de l'agent lors de ses interactions avec
l'environnement. Mais malgré ceci, l'agent a quand même bien réussi à s'adapter aux
différentes circonstances qui lui ont été soumises, et c'est par une grande malchance
qu'il manqua d'énergie avant d'atteindre le point de charge. L'histoire de l'agent et
son vécu dans l'environnement affectent donc directement son comportement.
9.2. Environnement complexe
Le second environnement utilisé est plus grand que le premier, avec encore trois
cibles et un point de charge situé aussi à son coin inférieur gauche. L'autonomie de
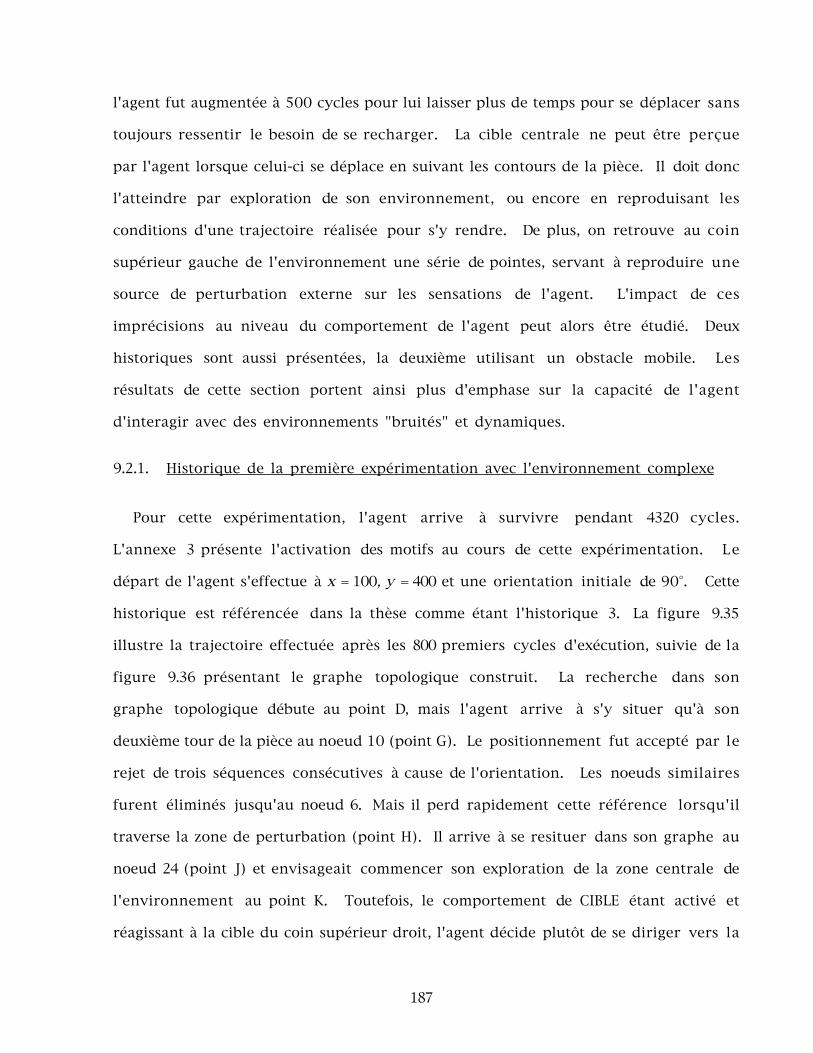
187
l'agent fut augmentée à 500 cycles pour lui laisser plus de temps pour se déplacer sans
toujours ressentir le besoin de se recharger. La cible centrale ne peut être perçue
par l'agent lorsque celui-ci se déplace en suivant les contours de la pièce. Il doit donc
l'atteindre par exploration de son environnement, ou encore en reproduisant les
conditions d'une trajectoire réalisée pour s'y rendre. De plus, on retrouve au coin
supérieur gauche de l'environnement une série de pointes, servant à reproduire une
source de perturbation externe sur les sensations de l'agent. L'impact de ces
imprécisions au niveau du comportement de l'agent peut alors être étudié. Deux
historiques sont aussi présentées, la deuxième utilisant un obstacle mobile. Les
résultats de cette section portent ainsi plus d'emphase sur la capacité de l'agent
d'interagir avec des environnements "bruités" et dynamiques.
9.2.1. Historique de la première expérimentation avec l'environnement complexe
Pour cette expérimentation, l'agent arrive à survivre pendant 4320 cycles.
L'annexe 3 présente l'activation des motifs au cours de cette expérimentation. Le
départ de l'agent s'effectue à x = 100, y = 400 et une orientation initiale de 90°. Cette
historique est référencée dans la thèse comme étant l'historique 3. La figure 9.35
illustre la trajectoire effectuée après les 800 premiers cycles d'exécution, suivie de la
figure 9.36 présentant le graphe topologique construit. La recherche dans son
graphe topologique débute au point D, mais l'agent arrive à s'y situer qu'à son
deuxième tour de la pièce au noeud 10 (point G). Le positionnement fut accepté par le
rejet de trois séquences consécutives à cause de l'orientation. Les noeuds similaires
furent éliminés jusqu'au noeud 6. Mais il perd rapidement cette référence lorsqu'il
traverse la zone de perturbation (point H). Il arrive à se resituer dans son graphe au
noeud 24 (point J) et envisageait commencer son exploration de la zone centrale de
l'environnement au point K. Toutefois, le comportement de CIBLE étant activé et
réagissant à la cible du coin supérieur droit, l'agent décide plutôt de se diriger vers la
188
cible. Le même phénomène se produisit au point M. Au point N, une séquence
similaire fut trouvée dans la zone de perturbation, mais l'agent n'a pu continuer à se
retrouver dans son graphe topologique par la suite. L'agent termine sa course au
point O sans avoir débuté son exploration de l'environnement. Dans le graphe
topologique de la figure 9.36, il est possible de remarquer la prolifération des noeuds
dans la zone de perturbation.
A B,E,I
C,F,H,L
D,H,N K
M
O
G
Départ J
Figure 9.35 Trace de l'historique 3, cycles 0 à 800

189
Figure 9.36 Graphe topologique de l'historique 3, cycles 0 à 800
Quand l'agent reprend son chemin tel que présenté par la figure 9.37, il n'arrive
qu'à se resituer dans son graphe topologique au noeud 24 (point B). Il n'arrive pas
alors à trouver une similitude avec un des noeuds lié au noeud 24. Toutefois, en
effectuant une recherche avec noeud intermédiaire (section 7.4.3) au noeud suivant,
il arrive à trouver une similitude et permet d'établir une nouvelle jonction entre la
branche construite lors du premier tour de la pièce (noeud 5), et celle construite lors
du deuxième tour (au noeud 24). Il y a alors deux chemins pour se diriger vers le
point B. Par la suite, l'agent débute l'exploration au point C et arrive à rejoindre la
cible centrale (point D). Il contourne l'obstacle rectangulaire ce qui le ramène sur
ses pas. L'agent se dirige alors au point de charge sans arriver à se positionner dans
son graphe topologique. Une fois rechargé, il se dirige vers la cible du coin
supérieur gauche (point H). Il y reste toutefois pris et DÉGAGE est activé par le motif
DÉTRESSE et le module de besoins. La constance de la moyenne de l'exploitation de
URGENCE et ÉVITER fut la source d'excitation du motif DÉTRESSE. L'agent se voit à

190
nouveau orienté vers le point de charge, sans toutefois savoir où il se situe par
rapport à une trajectoire passée mémorisée dans son graphe topologique. Le graphe
topologique résultant est illustré à la figure 9.38. On peut y remarquer la trajectoire
empruntée vers la cible centrale.
A
B
C
D
E
F
G
H
I
Figure 9.37 Trace de l'historique 3, cycles 800 à 1350

191
Figure 9.38 Graphe topologique de l'historique 3, cycles 0 à 1350
La figure 9.39 présente la suite de la trajectoire de l'agent. En a), l'agent fait deux
fois le tour de la pièce, n'étant pas en mesure d'explorer d'autres endroits soit à cause
qu'il n'arrive pas à se situer dans le graphe topologique (principalement dans la zone
de perturbation même s'il y arrive brièvement parfois), qu'il se voit attiré vers une
cible ou qu'un noeud indique qu'une exploration fut déjà engagée à cet endroit. En b)
toutefois, l'agent arrive à se positionner dans le graphe à son point de charge, et
trouve un nouveau site pour l'exploration (point J). Il atteint à nouveau la cible
centrale et retourne suivre le contour de la pièce. Il se positionne dans son graphe
topologique au point L en trouvant une similitude en sens inverse de construction des
noeuds. Les conditions pour l'exploration sont à nouveau respectées et l'agent repart
vers le centre de la pièce. L'agent atteint une troisième fois la cible centrale qui est
alors désactivée et donc imperceptible pour l'agent.

192
A,E
B,F
C,G
D,H
I J
KL,P
MN
O
Q
R
a) Cycles 1350 à 1850 b) Cycles 1850 à 2330
Figure 9.39 Traces de l'historique 3, cycles 1350 à 1850 et cycles 1850 à 2330
Rendu au point O, soit après 2161 cycles d'exécution, le graphe topologique est
complètement rempli. Le temps d'initialiser les noeuds tampons, l'agent se positionne
dans son graphe topologique au point L. Le besoin de recharger son accumulateur
d'énergie se faisant sentir, la trajectoire planifiée confirme à l'agent qu'il est dans la
bonne direction, et ce même si le graphe topologique est parcouru est sens inverse.
L'agent perd sa position dans le graphe au point Q, et termine sa course au point R. La
recharge et l'optimisation du graphe sont alors entreprises.
Le graphe topologique avant optimisation est présenté à la figure 9.40, suivi du
graphe topologique optimisé à la figure 9.41. Un total de 41 noeuds furent éliminés. I l
est possible de remarquer qu'un grand nombre de noeuds furent éliminés dans la
zone de perturbation. De plus, les trajectoires allant des noeuds 69 à 72 et des noeuds
32, 39, 35 et 36 ont été préservées car elles sont les trajectoires retenues pour la cible
centrale. Les noeuds de but pour la cible centrale sont 36 et 72, et l'agent n'a pu
déduire qu'ils sont liés à la même cible car deux trajectoires différentes ont été
empruntées pour l'atteindre. Les noeuds 54 et 55 n'ont pas été associés à la cible
centrale, car la cible était inactive lorsqu'elle fut visitée par l'agent. La troisième

193
branche pour l'exploration partant du noeud 46 a été préservée par planification
d'une trajectoire entre le noeud 91 (la cible du coin supérieur gauche) et le noeud 21
(du point de charge). En effet, l'agent n'ayant pu se localiser par rapport à une
trajectoire passée dans la zone de perturbation et puisque le graphe topologique fut
rempli au point O, la seule trajectoire possible était de préserver toute la branche.
Trois noeuds sont associés à la cible du coin supérieur gauche, soit les noeuds 10, 88 et
91. Pour le noeud 10, la trajectoire ne passe pas par la zone de perturbation. Pour le
noeud 88 par contre (créé avant l'occurrence de DÉTRESSE à la figure 9.37), la
trajectoire effectuée du point de charge vers la cible fut celle préservée. Enfin, les
noeuds 42 et 48 ont été préservés à cause des conditions cognitives mémorisées,
malgré le fait que ces conditions n'aient pas été complétées.
Figure 9.40 Graphe topologique de l'historique 3, cycles 0 à 2161

194
Figure 9.41 Graphe topologique optimisé de l'historique 3
L'agent exploite alors son graphe topologique pour rejoindre les cibles. La
trajectoire réalisée pour les cycles 2330 à 3500 est présentée à la figure 9.42. L'agent
commence par atteindre la cible du coin supérieur gauche (point B). L'agent arrive à
se positionner dans son graphe avant d'y arriver, et confirme par planification qu'il
est dans la bonne direction pour atteindre la cible la plus proche. La même chose se
produit pour la cible au point C. L'agent poursuit son chemin jusqu'au point de
charge. La prochaine cible que l'agent cherche à atteindre est la cible centrale du
noeud 72. Au point F, l'agent réalise qu'il doit faire demi-tour pour atteindre la cible.
L'agent fait demi-tour mais puisque les noeuds tampons doivent alors être réinitialisés
lorsque l'agent perçoit des états topologiques différents de ceux du graphe
topologique (causés par la rotation de 180°), il met trop de temps à se repositionner et
ne fait que passer tout droit au noeud 69. L'agent se voit donc pris dans un cercle
vicieux causé par la replanification successive dans la région du noeud 69, jusqu'à ce
que le motif DÉCEPTION se manifeste pour la cible du coin supérieur gauche. L'agent
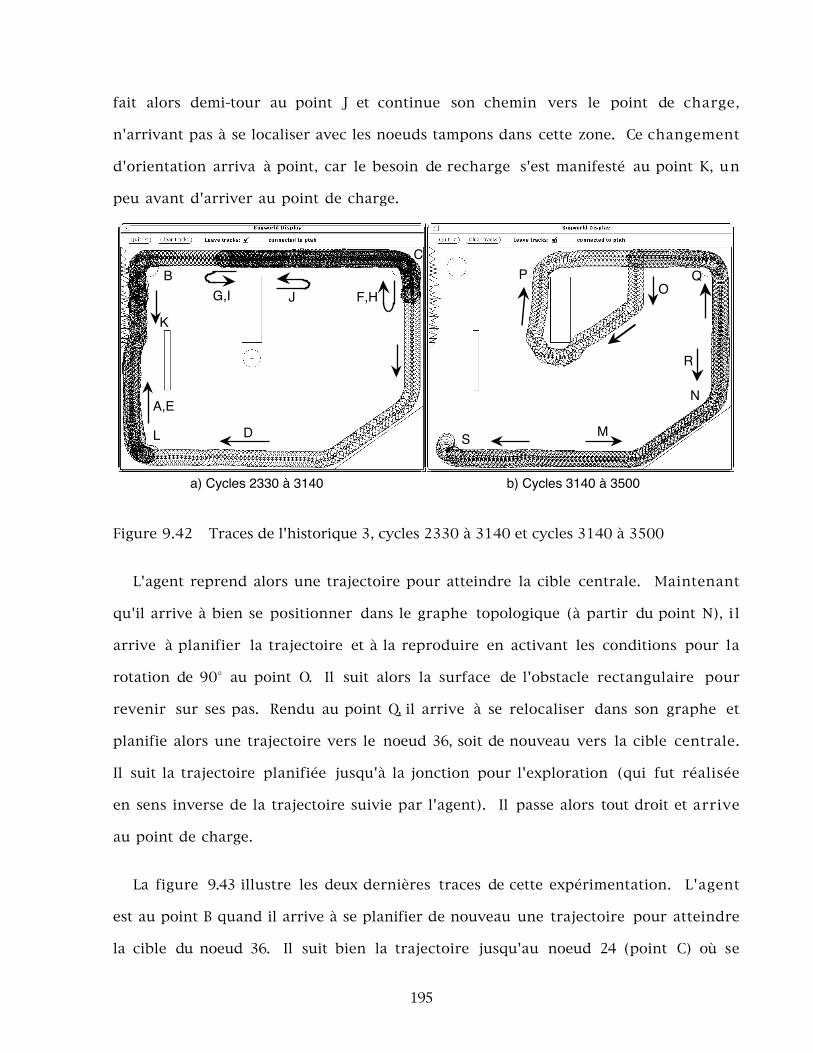
195
fait alors demi-tour au point J et continue son chemin vers le point de charge,
n'arrivant pas à se localiser avec les noeuds tampons dans cette zone. Ce changement
d'orientation arriva à point, car le besoin de recharge s'est manifesté au point K, un
peu avant d'arriver au point de charge.
a) Cycles 2330 à 3140 b) Cycles 3140 à 3500
A,E
C
D
F,HG,I J
K
L M
N
OP Q
S
B
R
Figure 9.42 Traces de l'historique 3, cycles 2330 à 3140 et cycles 3140 à 3500
L'agent reprend alors une trajectoire pour atteindre la cible centrale. Maintenant
qu'il arrive à bien se positionner dans le graphe topologique (à partir du point N), i l
arrive à planifier la trajectoire et à la reproduire en activant les conditions pour la
rotation de 90° au point O. Il suit alors la surface de l'obstacle rectangulaire pour
revenir sur ses pas. Rendu au point Q, il arrive à se relocaliser dans son graphe et
planifie alors une trajectoire vers le noeud 36, soit de nouveau vers la cible centrale.
Il suit la trajectoire planifiée jusqu'à la jonction pour l'exploration (qui fut réalisée
en sens inverse de la trajectoire suivie par l'agent). Il passe alors tout droit et arrive
au point de charge.
La figure 9.43 illustre les deux dernières traces de cette expérimentation. L'agent
est au point B quand il arrive à se planifier de nouveau une trajectoire pour atteindre
la cible du noeud 36. Il suit bien la trajectoire jusqu'au noeud 24 (point C) où se

196
produit une divergence avec le graphe topologique. Il n'arrive qu'à se resituer au
noeud 14 (point D) dans la zone de perturbation. Mais à ce point, puisque le motif JOIE
fut relativement faible pour les cycles passés et que peu de trajectoires arrive à être
planifiée, l'agent se sent suffisamment ennuyé (motif ENNUI) pour arrêter
l'exploitation de son graphe topologique. Deux cibles mémorisés dans le graphe n'ont
pu être atteinte durant l'exploitation du graphe, soit celles des noeuds 36 et 88. La
figure 9.44 illustre l'influence des motifs associés à l'ennui, l'inhibition du motif
EXPLOITER et à la reprise de l'exploration de l'environnement.
a) Cycles 3500 à 3860 b) Cycles 3860 à 4320
A,D
B
C
E F
GH
IJ
K
LM
Figure 9.43 Traces de l'historique 3, cycles 3500 à 3860 et cycles 3860 à 4320
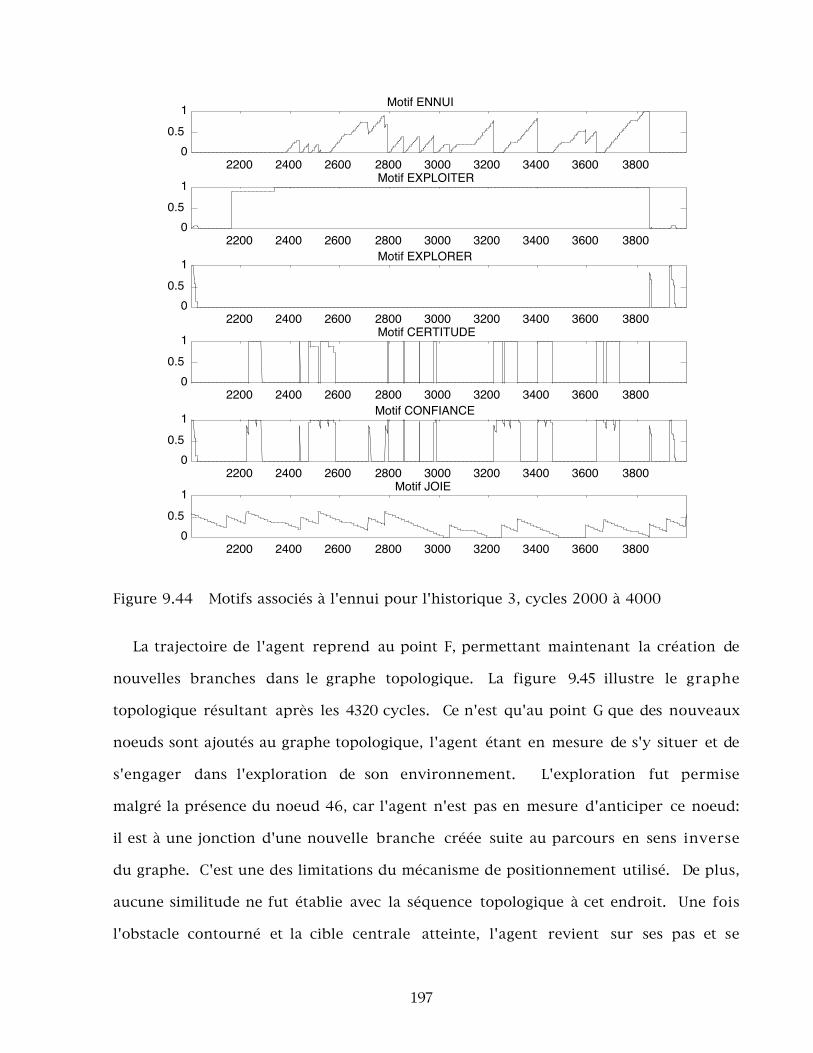
197
00.5
1
2200 2400 2600 2800 3000 3200 3400 3600 3800
Motif JOIE
00.5
1
2200 2400 2600 2800 3000 3200 3400 3600 3800
Motif CONFIANCE
00.5
1
2200 2400 2600 2800 3000 3200 3400 3600 3800
Motif CERTITUDE
00.5
1
2200 2400 2600 2800 3000 3200 3400 3600 3800
Motif ENNUI
00.5
1
2200 2400 2600 2800 3000 3200 3400 3600 3800
Motif EXPLORER
00.5
1
2200 2400 2600 2800 3000 3200 3400 3600 3800
Motif EXPLOITER
Figure 9.44 Motifs associés à l'ennui pour l'historique 3, cycles 2000 à 4000
La trajectoire de l'agent reprend au point F, permettant maintenant la création de
nouvelles branches dans le graphe topologique. La figure 9.45 illustre le graphe
topologique résultant après les 4320 cycles. Ce n'est qu'au point G que des nouveaux
noeuds sont ajoutés au graphe topologique, l'agent étant en mesure de s'y situer et de
s'engager dans l'exploration de son environnement. L'exploration fut permise
malgré la présence du noeud 46, car l'agent n'est pas en mesure d'anticiper ce noeud:
il est à une jonction d'une nouvelle branche créée suite au parcours en sens inverse
du graphe. C'est une des limitations du mécanisme de positionnement utilisé. De plus,
aucune similitude ne fut établie avec la séquence topologique à cet endroit. Une fois
l'obstacle contourné et la cible centrale atteinte, l'agent revient sur ses pas et se
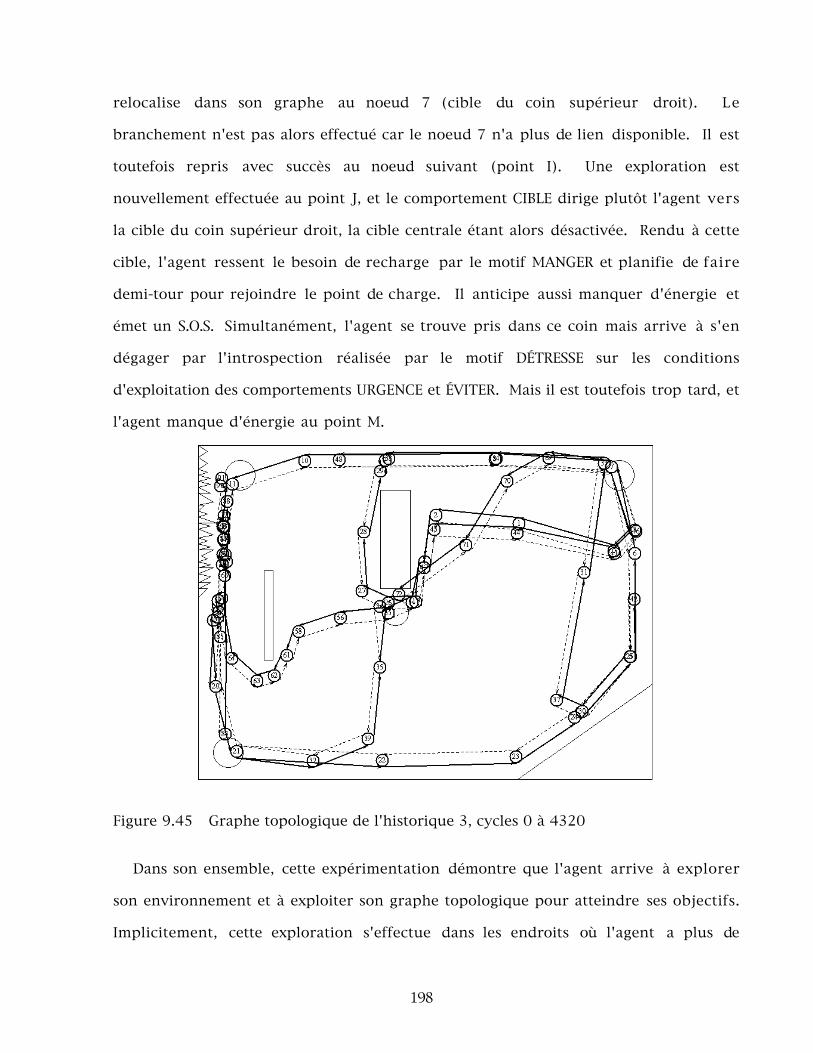
198
relocalise dans son graphe au noeud 7 (cible du coin supérieur droit). Le
branchement n'est pas alors effectué car le noeud 7 n'a plus de lien disponible. Il est
toutefois repris avec succès au noeud suivant (point I). Une exploration est
nouvellement effectuée au point J, et le comportement CIBLE dirige plutôt l'agent vers
la cible du coin supérieur droit, la cible centrale étant alors désactivée. Rendu à cette
cible, l'agent ressent le besoin de recharge par le motif MANGER et planifie de faire
demi-tour pour rejoindre le point de charge. Il anticipe aussi manquer d'énergie et
émet un S.O.S. Simultanément, l'agent se trouve pris dans ce coin mais arrive à s'en
dégager par l'introspection réalisée par le motif DÉTRESSE sur les conditions
d'exploitation des comportements URGENCE et ÉVITER. Mais il est toutefois trop tard, et
l'agent manque d'énergie au point M.
Figure 9.45 Graphe topologique de l'historique 3, cycles 0 à 4320
Dans son ensemble, cette expérimentation démontre que l'agent arrive à explorer
son environnement et à exploiter son graphe topologique pour atteindre ses objectifs.
Implicitement, cette exploration s'effectue dans les endroits où l'agent a plus de

199
facilité à se localiser, et cette condition est nécessaire pour l'utilisation des noeuds
tampons. Des limitations furent toutefois observées au niveau de la reproduction ou
l'anticipation de noeuds lorsque le graphe est parcouru en sens inverse et qu'une
jonction avec une nouvelle branche doit être suivie. Il est aussi possible de
remarquer que l'impossibilité de discriminer les mêmes cibles atteintes par des
trajectoires différentes peut mener l'agent à tenter d'atteindre la même cible
plusieurs fois. Cette même condition s'applique si l'agent a de la difficulté à se
localiser dans le graphe par ses noeuds tampons à son arrivée sur la cible. De plus,
l'environnement est plus grand et plus complexe, ce qui ne laisse pas beaucoup de
temps à l'agent pour partir explorer lorsqu'il arrive à se resituer, les cibles ayant le
temps de se réactiver avant son retour. Mais l'agent arrive à s'adapter à ses lacunes et
à ces nouvelles situations à partir de l'organisation effectuée par ses motifs, en
replanifiant après avoir passé tout droit à une jonction, ou en modifiant ses objectifs
poursuivis en fonction de l'environnement et de ses états internes.
9.2.2. Historique de la deuxième expérimentation avec l'environnement complexe
Cette dernière expérimentation implique l'utilisation d'un obstacle mobile afin
d'étudier l'impact sur le graphe topologique et la capacité de localisation de l'agent
dans une telle situation. La figure 9.46 illustre la trajectoire empruntée par l'obstacle
mobile. Pour la présentation des traces de cette expérimentation, l'arrêt de l'agent se
fait généralement proche de l'obstacle mobile et non au point de charge comme pour
les trois expérimentations précédentes. Il est alors plus facile de comprendre la
trajectoire de l'agent à la proximité de l'obstacle mobile en fonction de la position de
l'obstacle à cet instant.

200
Figure 9.46 Environnement avec obstacle mobile
Au cours de cette expérimentation, l'agent arrive à survivre pendant 3061 cycles.
L'annexe 4 présente l'activation des motifs au cours de cette expérimentation. Cette
historique est référencée dans la thèse comme étant l'historique 4. Le départ de
l'agent s'effectue aussi à x = 100, y = 400 et une orientation initiale de 90°. La figure
9.47 illustre la trajectoire effectuée après les 60 premiers cycles d'exécution, suivie de
la figure 9.48 présentant le graphe topologique construit. À sa première rencontre
avec l'obstacle mobile (point B), l'agent perçoit un corridor et se crée un noeud
topologique à cet effet, comme le montre la séquence de noeuds 3, 4 et 5. Il continue
de suivre les contours de la pièce et commence à tenter de se positionner dans son
graphe au point E. Quand il se voit à nouveau proche de l'obstacle mobile (point F), le
corridor n'est plus perceptible. Il ne peut se localiser dans son graphe, et les noeuds
26 et 27 sont alors créés pour caractériser cette situation. Sa trace se termine au point
G.

201
a) Cycles 0 à 60 b) Cycles 60 à 330
A B
DE
GC
F
Départ
Figure 9.47 Traces de l'historique 4, cycles 0 à 60 et cycles 60 à 330
Figure 9.48 Graphe topologique de l'historique 4, cycles 0 à 330
La figure 9.49 poursuit avec la trace de la trajectoire de l'agent pour les cycles 330 à
870. L'agent poursuit sa route en suivant les contours de la pièce, et arrive à se situer
dans son graphe topologique au point B (noeud 13) après le rejet de trois séquences
consécutives à cause de l'orientation. Il arrive à éliminer des noeuds dans son graphe

202
topologique jusqu'au noeud 9. Il ne garde pas très longtemps cette référence car i l
traverse alors la zone de perturbation. Lorsqu'il rencontre à nouveau l'obstacle
mobile (toujours en étant non situé dans son graphe topologique), l'obstacle lui
bloque le chemin (point D). L'agent arrive alors à le contourner. L'agent arrive à se
resituer encore au noeud 13 mais ne remonte pas cette fois dans son graphe pour
éliminer des noeuds passés. Il perd à nouveau cette référence au point G. De plus, i l
reste partiellement pris à un des pics et le motif DÉTRESSE commence à se faire sentir,
mais sans causer l'activation du comportement DÉGAGE. La source d'excitation du
motif est alors la non exploitation de VITESSE qui est pourtant activé. Au point I ,
l'agent se fait presque "écrasé" par l'obstacle mobile, ce qui explique sa trajectoire
discontinue au point J.
a) Cycles 330 à 610 b) Cycles 610 à 870
A
B
CE
F
G
H JD
I
Figure 9.49 Traces de l'historique 4, cycles 330 à 610 et cycles 610 à 870
La suite de la trace est présenté à la figure 9.50. L'agent arrive finalement à se
situer au point A (noeud 9), et parvient à débuter l'exploration au point B. Il atteint
alors la cible centrale, et revient sur ses pas après avoir suivi les contours de
l'obstacle vertical rectangulaire. Il arrive à se resituer au même point que précédent,
et reprend l'exploration au point E. Il atteint à nouveau la cible centrale qui est

203
encore désactivée à cet instant. En se dirigeant vers la cible du coin supérieur
gauche, le besoin de se diriger vers le point de charge se manifeste. L'agent arrive à
se situer dans son graphe malgré le nombre important de noeuds construits pour la
zone de perturbation. L'agent planifie une trajectoire vers le point de charge en plus
de ressentir de la DÉCEPTION. La trajectoire planifiée indiquait à l'agent qu'il était
dans la bonne direction en continuant vers l'avant d'un noeud pour ensuite devoir
faire demi-tour. Le motif DÉCEPTION a permis à l'agent de réagir plus tôt (point H). En
revenant vers le point de charge, il arrive à nouveau à se situer dans son graphe et à
planifier une trajectoire lui indiquant qu'il est sur la bonne voie. Une fois le point de
charge visible, l'exploitation de RECHARGE bloqua le niveau de CERTITUDE à 40% (voir
annexe 4). Finalement, sa rencontre avec l'obstacle mobile au point J le fait dévier de
la surface, attirée par la cible centrale puisque le comportement CIBLE est activé de
par un niveau de JOIE nul (voir annexe 4).
a) Cycles 870 à 1370 b) Cycles 1370 à 1564
AB
C
D
E
FH
I
J
K
L MN
O
P
Figure 9.50 Traces de l'historique 4, cycles 870 à 1370 et cycles 1370 à 1564
Pour les cycles 1370 à 1564 de la figure 9.50, l'agent commence par atteindre la
cible centrale (point K). Ensuite, en reprenant sa trajectoire sur les contours de
l'environnement, le motif DÉCEPTION lui fait faire demi-tour pour atteindre la cible au
204
point N. L'agent arrive à se resituer dans son graphe topologique au noeud 14 (point
N), et désire explorer à nouveau son environnement. Malgré la difficulté de
percevoir des formes stables dans cette zone, le noeud anticipé permet d'activer les
conditions pour la rotation de 90°. De plus, l'agent anticipe pour ce même noeud une
possibilité de DÉTRESSE (point G figure 9.49) et inhibe ALIGNER qui l'était déjà par les
conditions pour effectuer la rotation de 90°. L'agent arrive à s'éloigner
perpendiculairement à la surface et perçoit sa transition de 90° correctement lors de
l'analyse lexicale. Il continue sa course en tentant sans succès de suivre le contour de
gauche de l'obstacle vertical rectangulaire. Il arrive au point P sans rencontrer
l'obstacle mobile.
Au cycle 1564, il ne reste plus de noeuds disponibles pour construire de nouvelles
branches dans le graphe topologique. La figure 9.51 illustre le graphe topologique
rempli. Il est possible de remarquer qu'une mauvaise similitude fut réalisée (au cycle
1072) dans le graphe topologique comme le montre les liens entres les noeuds 76 vers
62, et du point de charge vers le noeud 80. La séquence similaire trouvée est résulte
en fait du passage de l'agent proche de l'obstacle mobile au cycle 860. L'obstacle
mobile avait alors été perçu comme un corridor. Les séquences de noeuds, bien que
similaires, ne correspondaient pas à la réalité de l'environnement. L'agent a donc
fait une erreur de représentation interne et cette erreur est même responsable de son
exploration au point E de la figure 9.50.
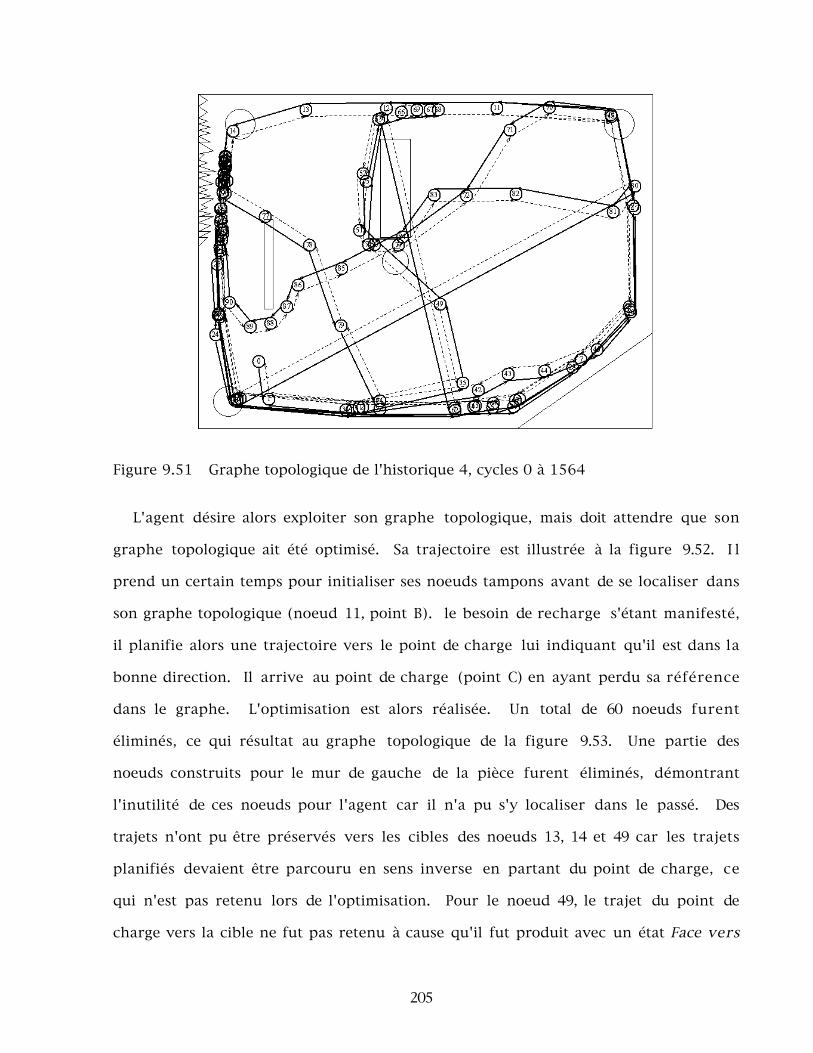
205
Figure 9.51 Graphe topologique de l'historique 4, cycles 0 à 1564
L'agent désire alors exploiter son graphe topologique, mais doit attendre que son
graphe topologique ait été optimisé. Sa trajectoire est illustrée à la figure 9.52. I l
prend un certain temps pour initialiser ses noeuds tampons avant de se localiser dans
son graphe topologique (noeud 11, point B). le besoin de recharge s'étant manifesté,
il planifie alors une trajectoire vers le point de charge lui indiquant qu'il est dans la
bonne direction. Il arrive au point de charge (point C) en ayant perdu sa référence
dans le graphe. L'optimisation est alors réalisée. Un total de 60 noeuds furent
éliminés, ce qui résultat au graphe topologique de la figure 9.53. Une partie des
noeuds construits pour le mur de gauche de la pièce furent éliminés, démontrant
l'inutilité de ces noeuds pour l'agent car il n'a pu s'y localiser dans le passé. Des
trajets n'ont pu être préservés vers les cibles des noeuds 13, 14 et 49 car les trajets
planifiés devaient être parcouru en sens inverse en partant du point de charge, ce
qui n'est pas retenu lors de l'optimisation. Pour le noeud 49, le trajet du point de
charge vers la cible ne fut pas retenu à cause qu'il fut produit avec un état Face vers

206
x, ce qui est aussi rejeté pour les trajets planifiés. Ceci est une bonne décision car i l
aurait été difficile de reproduire cette trajectoire par l'agent qui avait alors rencontré
l'obstacle mobile sur son chemin (point J, figure 9.50). De plus, la trajectoire retenue
pour la cible du coin supérieur gauche ne passe pas par cet endroit, le motif DÉTRESSE
y ayant été mémorisé et que l'agent souhaite éviter. Il reste qu'une partie des noeuds
dans la zone de perturbation fut préservée, étant donné que l'agent a réussi à s'y
relocaliser à quelque reprise. Au niveau de l'erreur dans le graphe topologique, seul
le noeud 80 fut préservé à cause de la condition cognitive d'exploration qui y est
mémorisée. Par contre, si la cible centrale avait été mémorisée au noeud 84 lors de la
construction de cette branche, une partie des noeuds aurait été préservée. L'agent
reprend sa course pour passer près de l'obstacle mobile au point D.
A
B
D
C
EF
G
H
a) Cycles 1564 à 1865 b) Cycles 1865 à 2115
Figure 9.52 Traces de l'historique 4, cycles 1564 à 1865 et cycles 1865 à 2115
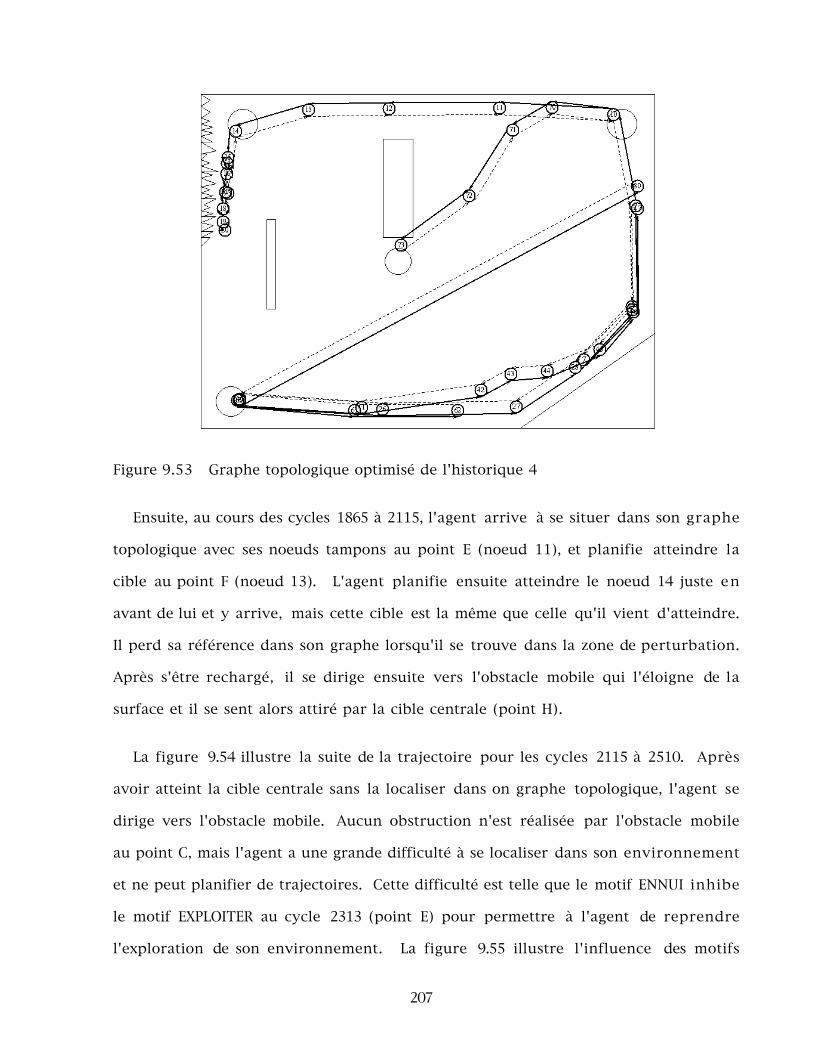
207
Figure 9.53 Graphe topologique optimisé de l'historique 4
Ensuite, au cours des cycles 1865 à 2115, l'agent arrive à se situer dans son graphe
topologique avec ses noeuds tampons au point E (noeud 11), et planifie atteindre la
cible au point F (noeud 13). L'agent planifie ensuite atteindre le noeud 14 juste en
avant de lui et y arrive, mais cette cible est la même que celle qu'il vient d'atteindre.
Il perd sa référence dans son graphe lorsqu'il se trouve dans la zone de perturbation.
Après s'être rechargé, il se dirige ensuite vers l'obstacle mobile qui l'éloigne de la
surface et il se sent alors attiré par la cible centrale (point H).
La figure 9.54 illustre la suite de la trajectoire pour les cycles 2115 à 2510. Après
avoir atteint la cible centrale sans la localiser dans on graphe topologique, l'agent se
dirige vers l'obstacle mobile. Aucun obstruction n'est réalisée par l'obstacle mobile
au point C, mais l'agent a une grande difficulté à se localiser dans son environnement
et ne peut planifier de trajectoires. Cette difficulté est telle que le motif ENNUI inhibe
le motif EXPLOITER au cycle 2313 (point E) pour permettre à l'agent de reprendre
l'exploration de son environnement. La figure 9.55 illustre l'influence des motifs

208
durant cette période. L'agent reprend ensuite sa route en créant maintenant des
nouveaux noeuds et une fois relocalisé dans le graphe topologique, il part explorer la
zone centrale de la pièce (point F). Mais bien que le comportement CIBLE soit activé,
l'agent passe à côté de la cible sans y être attirée, la cible étant encore inactive.
Arrivée proche de l'obstacle mobile, la cible centrale redevient active, ce qui excite le
motif DÉCEPTION. Mais n'étant pas en mesure de faire demi-tour et de revenir sur ses
pas à ce point, il laisse tomber. L'agent est alors davantage préoccupée par son
arrivée sur le mur du bas (point G). La présence de l'obstacle et l'angle d'arrivée de
l'agent le font tourner vers le point de charge.
A
B
C DE
F
G
a) Cycles 2115 à 2270 b) Cycles 2270 à 2510
Figure 9.54 Traces de l'historique 4, cycles 2115 à 2270 et cycles 2270 à 2510
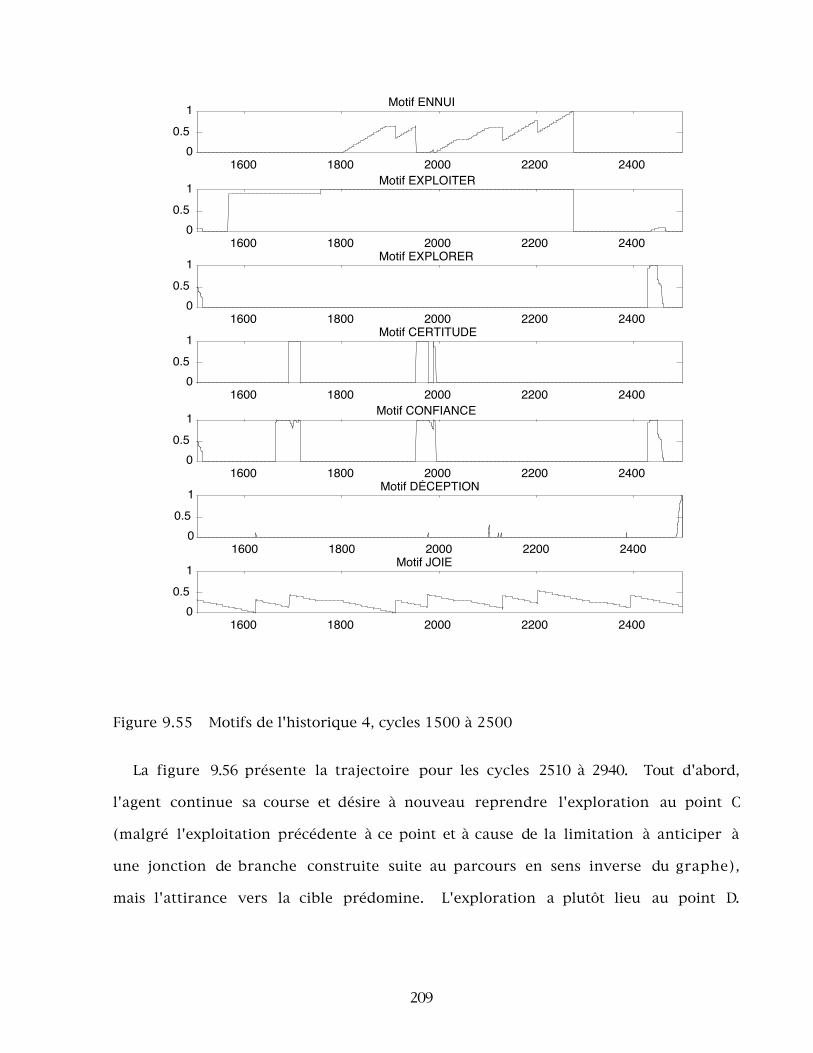
209
0
0.51
1600 1800 2000 2200 2400
Motif JOIE
00.5
1
1600 1800 2000 2200 2400
Motif CONFIANCE
00.5
1
1600 1800 2000 2200 2400
Motif CERTITUDE
00.5
1
1600 1800 2000 2200 2400
Motif ENNUI
00.5
1
1600 1800 2000 2200 2400
Motif EXPLORER
00.5
1
1600 1800 2000 2200 2400
Motif EXPLOITER
00.5
1
1600 1800 2000 2200 2400
Motif DÉCEPTION
Figure 9.55 Motifs de l'historique 4, cycles 1500 à 2500
La figure 9.56 présente la trajectoire pour les cycles 2510 à 2940. Tout d'abord,
l'agent continue sa course et désire à nouveau reprendre l'exploration au point C
(malgré l'exploitation précédente à ce point et à cause de la limitation à anticiper à
une jonction de branche construite suite au parcours en sens inverse du graphe),
mais l'attirance vers la cible prédomine. L'exploration a plutôt lieu au point D.

210
L'obstacle mobile n'influence pas à cet endroit la perception de l'agent. qui se trouve
plutôt attiré par la cible centrale.
AB
C
D
E
F
G
H
a) Cycles 2510 à 2760 b) Cycles 2760 à 2940
Figure 9.56 Traces de l'historique 4, cycles 2510 à 2760 et cycles 2760 à 2940
L'agent atteint alors vers la cible du point G. Il poursuit sa route sans arriver à se
positionner dans on graphe topologique. De plus, au point H, il arrive face à face avec
l'obstacle mobile qui avance alors sur lui. L'agent tente tout d'abord de l'éviter, mais
reste pris à sa base. L'examen de l'activation et l'exploitation du comportement
VITESSE permet alors d'exciter le motif de DÉTRESSE pour inciter l'agent à utiliser son
comportement DÉGAGE et se sortir d'impasse. La figure 9.57 illustre l'introspection
réalisée au niveau du comportement VITESSE pour activer le motif DÉTRESSE. Le
comportement VITESSE est alors pleinement activé et exploité pour plusieurs cycles,
signifiant que l'intention d'avancer de l'agent ne se concrétise pas.

211
00.5
1
2880 2900 2920 2940 2960
Motif DÉTRESSE
00.5
1
2880 2900 2920 2940 2960
Activation VITESSE
00.5
1
2880 2900 2920 2940 2960
Exploitation DÉGAGE
00.5
1
2880 2900 2920 2940 2960
Exploitation VITESSE
Figure 9.57 Conditions associées à la DÉTRESSE pour l'historique 4, cycles 2870 à 2970
L'agent épuisa une bonne quantité d'énergie à tenter de se sortir d'impasse, et
n'arrive pas à se localiser ou à prendre une trajectoire lui permettant d'atteindre le
point de charge avant d'épuiser ses réserves d'énergie. La figure 9.58 présente la
dernière trace de cette expérimentation, suivie du graphe topologique résultant à la
figure 9.59. Le S.O.S fut émis lorsqu'il ne restait plus que dix cycles d'énergie à
l'agent.
A
BC
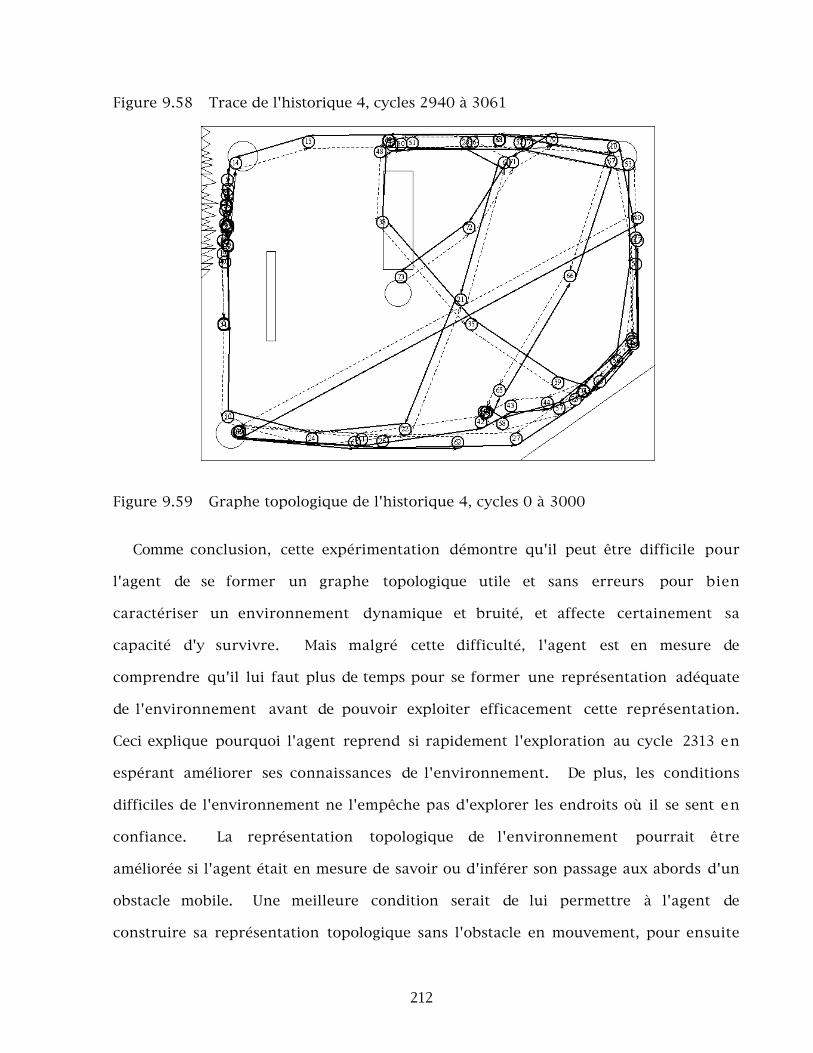
212
Figure 9.58 Trace de l'historique 4, cycles 2940 à 3061
Figure 9.59 Graphe topologique de l'historique 4, cycles 0 à 3000
Comme conclusion, cette expérimentation démontre qu'il peut être difficile pour
l'agent de se former un graphe topologique utile et sans erreurs pour bien
caractériser un environnement dynamique et bruité, et affecte certainement sa
capacité d'y survivre. Mais malgré cette difficulté, l'agent est en mesure de
comprendre qu'il lui faut plus de temps pour se former une représentation adéquate
de l'environnement avant de pouvoir exploiter efficacement cette représentation.
Ceci explique pourquoi l'agent reprend si rapidement l'exploration au cycle 2313 en
espérant améliorer ses connaissances de l'environnement. De plus, les conditions
difficiles de l'environnement ne l'empêche pas d'explorer les endroits où il se sent en
confiance. La représentation topologique de l'environnement pourrait être
améliorée si l'agent était en mesure de savoir ou d'inférer son passage aux abords d'un
obstacle mobile. Une meilleure condition serait de lui permettre à l'agent de
construire sa représentation topologique sans l'obstacle en mouvement, pour ensuite
213
faciliter sa localisation en créant des branches intermédiaires. La même chose se
produit ici aussi comme le démontre les branches intermédiaires de la figure 9.59,
mais ça demande plus de temps. Enfin, cette expérimentation démontre bien que la
boucle d'exploration, d'optimisation et d'exploitation permet de mémoriser, d'oublier
et d'utiliser successivement les connaissances jugées utiles en fonction d'un horizon
déterminée à même les interactions de l'agent avec son environnement.
9.3. Commentaires concernant les résultats présentés
D'une manière générale, les expérimentations présentées dans ce chapitre
démontrent que l'agent arrive à bien exploiter et tirer profit de ses interactions avec
son environnement dans le but d'y atteindre les cibles. Il y arrive malgré ses
limitations perceptuelles, de mémoire et de ses processus de décision. Plus
particulièrement, au niveau de la représentation internes des connaissances par
l'agent, les expérimentations ont pu démontrer les difficultés qu'entraîne l'emploi de
séquences similaires sur trois noeuds, la non-unicité des noeuds et l'impossibilité
d'utiliser le graphe topologique d'une façon réversible lors de jonction avec une
nouvelle branche. Bien sûr, des améliorations pourraient être apportées pour
corriger ces faiblesses ou pour rendre cette représentation plus performante. Mais
pour un agent ayant à oeuvrer dans des environnements complexes, il peut être
difficile au concepteur de prévoir toutes les situations qui doivent affecter cette
représentation. L'objectif ici était plutôt de vérifier comment l'agent, employant une
approche de contrôle basée sur SIR pour son contrôle, arrive à s'adapter aux
différentes circonstances, influencées tant par l'environnement que par ses états
internes. C'était aussi important de considérer de telles limitations avec
l'environnement simulé pour ne pas que l'agent fonctionne toujours avec une
représentation idéale mais peu réaliste de son environnement. Les résultats
214
présentés montrent jusqu'à quel point l'agent arrive à faire face avec robustesse et
tolérance aux fautes face aux circonstances provoquées par une représentation
interne limitée. Les motifs et l'introspection cognitive ont un rôle important à jouer
à ce niveau.
Les situations environnementales rencontrées par l'agent restent quand même
assez simples: une seule pièce avec différents angles et des obstacles, quelques cibles
inhibées une fois atteintes, un seul point de charge, une zone de perturbation
sensorielle et le passage prêt d'un obstacle mobile. Des situations beaucoup plus
complexes auraient pu être générées comme l'inhibition du point de charge, avoir
plusieurs agents dans la même pièce, avoir plusieurs pièces avec d'autres
configurations d'obstacles, etc. Mais ce n'était pas tant le niveau de complexité de
l'environnement qui était important pour la validation de SIR, mais plutôt comment
l'architecture permet à un agent d'exploiter au maximum ses ressources et de
s'adapter pour en limiter leurs lacunes afin de se comporter "intelligemment" dans
son environnement.
Il est possible de remarquer que l'agent conçu pour les expérimentations considère
un grand nombre de facteurs: douze comportements, dix motifs, un graphe
topologique, et les influences des besoins et de l'environnement. Il peut être très
difficile d'arriver à coordonner l'ensemble de ces facteurs d'un seul coup. C'est le rôle
du concepteur de bien analyser la problématique pour distribuer adéquatement les
fonctionnalités entre les modules selon leur rôle, choisir les comportements et les
motifs, ainsi que concevoir les mécanismes utiles pour la prise de décision avec SIR.
Cette tâche doit être réalisée en portant attention aux principes de base de SIR pour la
mise en oeuvre d'une politique de contrôle stable et efficace. Pour faciliter
l'équilibre et la détermination des influences entre les intervenants dans
l'architecture SIR, le concept de stratégie de contrôle s'avéra très utile. Une stratégie

215
de contrôle tente d'établir les interactions requises entre les modules et les
intervenants de SIR pour que l'agent arrive à se comporter d'une manière désirée.
Une façon d'établir ces stratégies est de se mettre à la place de l'agent afin de mieux
comprendre ce qu'il lui est utile et ce qu'il doit faire pour réaliser ses objectifs. Ceci
rejoint l'hypothèse de SIR que l'intelligence est propre au système, ou celle de Brooks
[38] qui stipule que l'intelligence est située. Une telle technique est en fait à l'origine
de l'utilisation des transitions entre les formes topologiques pour en déduire la
rotation effectuée par l'agent.
D'une façon plus générale, une stratégie peut être associée à différentes phases
dans la conception des modules. Par exemple, la première stratégie fut de concevoir
les comportements utiles pour permettre à l'agent de se déplacer dans son
environnement en suivant les contours. Le schéma d'activation des comportements
URGENCE, ÉVITER, VITESSE et ALIGNER fut alors pensé et incorporé dans le module de
situation externe globale, tout en ajustant les paramètres de contrôle de ces
comportements. Ensuite, la seconde stratégie incorporée fut de permettre la
recherche de cibles. Le motif JOIE, le comportement CIBLE et les règles de besoins
associées furent alors conçus. Il y a eu plusieurs autres stratégies d'élaborées comme
celle affectant le désir de MANGER, celle étudiant comment la DÉTRESSE pouvait être
déduite de l'observation des comportements, la FOLIE, l'exploration initiale de
l'environnement pour ensuite l'exploiter, l'activation et l'inhibition de
comportements pour faire demi-tour ou pour effectuer une rotation de 90°. Il est
donc difficile de qualifier une telle méthodologie de contrôle comme étant orientée
"du bas vers le haut" ou "du haut vers le bas": elle est plutôt axée vers une progression
croissante du niveau de complexité des stratégies de contrôle, ou encore du niveau
d'intelligence manifestée par l'agent. Ces stratégies de contrôle doivent toutefois être
orientées vers l'établissement d'un scénario plus général spécifiant le déroulement
216
souhaité du comportement de l'agent. Ce scénario est aussi choisi par le concepteur,
comme il fut fait à la section 4.3.1.
Un autre aspect important à considérer lors de l'élaboration de ces stratégies porte
sur la gestion des conflits entre les intervenants dans le processus de décision. Cette
gestion des conflits s'effectue à différents niveaux, et le concepteur doit choisir avec
soin le niveau propice pour un traitement efficace de ces conflits. Ces niveaux sont:
- les politiques de contrôle mises en oeuvre dans les comportements. Le
positionnement des fonctions d'appartenance, la formulation des règles et le
choix des conséquences peuvent servir à gérer les conflits à même les
comportements. Les opérations et les mécanismes utilisés pour l'inférence et la
fusion d'actions ont aussi un impact sur la gestion des conflits. Avec les
comportements flous, les opérateurs de conjonction, de disjonction et l'opération
de défuzzification doivent donc aussi être considérés à ce niveau. Ceci est
particulièrement vrai pour les comportements qui contrôlent les mêmes
actuateurs, comme URGENCE, ÉVITER et ALIGNER. Des indications pour prévenir
certains de ces conflits furent présentées à la section 5.3;
- les recommandations formulées sous forme de désirabilité et d'indésirabilité, et
leur utilisation pour la sélection de comportements. Au niveau interne, des
modules de recommandations et des conditions d'exclusivité peuvent permettre
de gérer les recommandations et les conflits. Au niveau du module de cognition,
l'utilisation de conditions exclusives facilite cette gestion. Il est toutefois
possible de faire la même chose au niveau des règles floues en considérant les
conditions bivalentes dans les règles (ex,: si x1 alors y, si non(x1) et x2 alors z).
Une autre façon de gérer les conflits consiste à tirer profit de l'effet inhibiteur
de l'indésirabilité. Tout module de recommandation peut ainsi s'assurer de
l'inactivité de comportements qui pourraient occasionner des conflits
217
lorsqu'utilisés avec d'autres. Enfin, les opérations pour la sélection finale
influencent aussi la gestion des conflits entre les recommandations formulées;
- du module de motifs. Ce module sert fondamentalement à coordonner l'ensemble
des ressources utilisées par SIR. Il y arrive en jouant le rôle de sens interne
introspectif qui communique avec les sources de recommandations et qui intègre
dans le temps certaines conditions d'opération. Le module de motifs influence la
gestion des conflits de deux façons: l'inter-influence entre motifs, et
l'introspection par l'exploitation de comportements. Le schéma d'influences
entre les motifs rattachés à la cognition est un bel exemple montrant comment
ils peuvent guider la planification et la gestion des connaissances. L'observation
de l'exploitation des comportement en fonction du type de règles employées
s'avéra aussi un moyen efficace d'identifier des conflits, comme le fait le motif
DÉTRESSE. Ce paramètre permet de contourner les limitations perceptuelles et
l'incapacité de tout prévoir ou de tout planifier lors de la conception en
comparant les intentions et les réactions. Ceci limite le fardeau d'optimalité lors
de la conception, et permet une plus grande adaptabilité à l'agent pour faire face
à des situations nouvelles venant de l'environnement ou de l'émergence de
fonctionnalités de par ses propres mécanismes de décision. Enfin, les motifs
permettent de guider et de superviser l'émergence de la fonctionnalité désirée
en préservant la propriété d'émergence globale du système.
L'ensemble de ces fonctionnalités a permis la mise en oeuvre d'un algorithme de
contrôle qui respecte les hypothèses formulées à la section 3.1 sur l'intelligence avec
SIR. Les comportements utilisés permettent à l'agent d'interagir avec son
environnement et d'en tirer des informations. Ses actions sont influencées par ce qui
est perçu de l'environnement (contexte externe) et de ses états internes (contexte
interne). L'interaction conjointe entre les comportements, les sources de
recommandations et les motifs font émerger holistiquement un comportement fondé

218
sur les expériences vécues dans son environnement. L'introspection fut considérée
au niveau des réactions et des connaissances de l'agent. Enfin, l'agent arrive à se
comportement d'une façon complètement autonome, contrôlant lui-même ses buts et
ses connaissances qui ont comme référence les capacités propres de l'agent.
L'émergence fut aussi considérée sous toutes ses dimensions lors des
expérimentations, soit au niveau des comportements, de leurs interactions, de leur
sélection, de leur fonctionnement interne et au niveau des connaissances.
En fait, les mécanismes flous pour les comportements, leur recommandation et leur
sélection hédonistique favorisèrent l'émergence tout comme la conception de l'agent,
en permettant de combiner ses niveaux numériques (perceptuels et d'actions) avec
des concepts symboliques. Les schémas d'activation des motifs permirent aussi de les
faire émerger de par les situations vécues par l'agent. Mais d'une façon encore plus
importante, l'émergence fut considérée au niveau du module de cognition par
l'utilisation de forme topologique, d'informations tirées de l'analyse de ces formes
(comme la rotation), la mémorisation d'états internes lors de la construction des
noeuds topologiques, la localisation par similitude de séquences de noeuds, et
l'élimination des noeuds jugés inutiles pour l'agent et ses objectifs de réalisation.
Ainsi, la fonctionnalité émergeante répond à long terme aux objectifs fondamentaux
de l'agent, à moyen terme à ses intentions, et à court terme à la situation courante.
L'émergence donne de la flexibilité et de la robustesse à l'agent, mais rend son
comportement difficile à anticiper par le concepteur. Le comportement de l'agent est
en fait déterministe mais non prévisible: déterministe car son comportement est
toujours dicté par des principes programmés (donnant une forme de personnalité à
l'agent); non prévisible car il est difficile de contrôler le déroulement des
expérimentations, le comportement de l'agent émergeant en fonction de ce qu'il
expérimente (ses états internes définissant son attitude affectée par le passé mais

219
responsable du comportement présent). Par exemple, la simple modification d'un
facteur d'incrémentation d'un motif pouvait provoquer une trajectoire différente où
la condition étudiée par le concepteur n'est plus reproduite. Une telle propriété est
liée à la rationalité de l'agent. Un agent rationnel prend de façon consistante les
mêmes choix lorsqu'il est dans la même situation et qu'il est sujet aux mêmes choix
(par les mêmes états mémorisés) [134]. Russell [169] aborde cette notion de rationalité
en indiquant qu'un agent rationnel est un agent dont les actions font du sens par
rapport à ses information et ses buts. Russell indique que la meilleure forme pour la
reproduire est d'utiliser une rationalité bornée. Une possibilité pour y arriver
consisterait à retenir très peu sous la forme de connaissances déclaratives, mais de
compiler continuellement ses expériences en des politiques réactives qu'on croit
appropriées à moyen terme. Au fur et à mesure que l'environnement change, l'agent
pourrait réécrire son état interne complet pour s'ajuster au nouvel ordre du monde,
gardant seulement ses structures de base pour répéter le processus dans le futur. C'est
bien ce qui fut reproduit avec SIR au cours de ces expérimentations. De telles
conditions de conception sont en fait le prix à payer pour concevoir des systèmes plus
autonomes, ce qui doit quand même être finement considéré par rapport aux dangers
potentiels que cela peut impliquer.
En guise de conclusion pour ce chapitre, les résultats qui ont été présentés
démontrent l'utilité des différents modules de SIR pour la conception d'agent
autonome et "intelligent". L'agent cherche à exploiter le maximum de ses ressources
disponibles, tant au niveau senso-motrices, des mécanismes internes, des
informations tirées des interactions avec l'environnement et de ses états internes
inférés qu'au niveau de ses compétences d'actions dans le monde. Il arrive aussi à
s'adapter pour en limiter leurs limitations. Comme le mentionnent Brooks [41] et
McFarland et Bösser [134], l'optimalité n'est pas un critère essentiel pour l'adaptation
et l'intelligence. Les résultats présentés répondent bien aussi à la vision de

220
McFarland et Bösser [134] concernant le comportement intelligent, soit qu'il n'est pas
simplement issue de la cognition mais du produit de la capacité comportementale et
des circonstances environnementales.
221
10. SIR ET SA CAPACITÉ D'UNIFIER LES CARACTÉRISTIQUES DE L'INTELLIGENCE
Les chapitres 3 à 9 ont présenté l'architecture de SIR, une mise en oeuvre possible
de ses modules et les résultats obtenus afin de comprendre comment une telle
architecture arrive à transmettre une intelligence à des systèmes. Il est maintenant
possible de démontrer en quoi SIR peut être associé aux principes de mise en oeuvre
et de définition de l'intelligence, ainsi que les aspects qui restent à y être validés.
Tout d'abord, la section 10.1 présente les liens entre SIR et les approches en contrôle
intelligent. La section 10.2 présente brièvement des liens entre SIR et les théories
psychologiques sur le comportement et l'intelligence. Ensuite, la section 10.3 décrit
comment SIR arrive à respecter les critères associés à l'intelligence tels que
présentés à la section 2.3. Finalement, la section 10.4 élabore sur les extensions
possibles de SIR et de sa validation pour la mise en oeuvre d'une intelligence plus
évoluée dans les systèmes.
10.1. SIR et l'intelligence en contrôle intelligent
Les bases du contrôle classique et du contrôle adaptatif peuvent se retrouver dans
l'architecture de SIR. En effet, un contrôleur PID peut prendre la place d'un
comportement car il permet d'établir une correspondance entre les sensations et des
actions. Une architecture MRAC de contrôle adaptatif [1] peut aussi s'intégrer dans
SIR: le module de cognition contiendrait alors le modèle mathématique du système
pour réaliser l'adaptation via les paramètres internes du contrôleur, qui lui se trouve
au niveau comportementale. Le contrôle à propagation avant (feedforward) [164]
peut aussi y être intégré de cette façon. Cependant, il est maintenant possible
d'étendre ces méthodologies avec SIR pour des environnements plus complexes en les
couplant avec des principes de l'IA comme la planification, la réactivité et les

222
motivations. Il serait donc possible d'avoir des comportements réactifs pour le
déplacement d'une machine dans un environnement et d'utiliser un comportement
PID pour contrôler un bras robotisé sur cette machine, tout en considérant des
motivations et des connaissances pour gérer ces modes d'actions.
De plus, SIR permet aussi de situer en quoi les méthodologies de l'IA peuvent être
utiles pour la mise en oeuvre de l'intelligence. L'emploi de la logique floue ou du
graphe topologique tel que proposé dans cette thèse ne sont que des exemples, et
d'autres techniques pourraient être utiles dans les différents modules de SIR. Par
exemple, des réseaux de neurones artificiels pourraient être utilisés comme
comportements; un module perceptuel plus évolué pourrait être utilisé au niveau du
module de situation externe global; le raisonnement par cas serait une manière de
représenter à l'interne des connaissances dans le module de cognition, et où
l'approche génétique pourrait servir de méthode de recherche optimale et "créative";
etc. La généralité de l'architecture à ce niveau permet d'exploiter au besoin les
techniques développées pour d'autres systèmes afin d'en exploiter les forces, en
fonction des capacités sensorielles, d'action et de traitement requises pour le système
autonome à contrôler. L'important, c'est d'utiliser les mécanismes qui semblent les
plus efficaces en fonction de ce que le système doit réaliser dans son environnement.
L'environnement et le niveau des interactions entre le système et
l'environnement ont aussi un impact direct sur l'utilité des modules de SIR. Si
l'environnement est bien connu et fixe, il est alors possible que les modules de motifs
et de besoins soient inutiles. Par contre, si le système doit opérer dans des
environnements complexes, alors les modules de motifs et de besoins peuvent être
utiles. Le type d'environnement et le rôle que doit y jouer le système sont donc deux
facteurs influençant l'utilité des modules de SIR lors de la mise en oeuvre d'une
politique de contrôle.
223
10.1.1. SIR et les quatre principes de mise en oeuvre de l'intelligence
Puisque SIR tente d'unifier les différents principes associés à l'intelligence et sa
mise en oeuvre dans la machine, elle présente donc plusieurs similitudes avec les
principes de mise en oeuvre de l'intelligence présentés à la section 2.1.
Par rapport à la vision hiérarchique de l'intelligence, SIR aussi peut être perçu
comme une architecture à trois niveaux: le niveau d'exécution par le module
comportemental et de fusion d'actions, le niveau de coordination par les modules de
recommandations et de sélection finale, et le niveau d'organisation par le module de
motifs. La différence majeure se situe au niveau du flux d'informations entre les
niveaux qui ne correspondent plus simplement à des sensations ou des commandes.
Par contre, SIR possède d'importantes divergences avec la vision par étapes
fonctionnelles, car cette vision entre directement en conflit avec l'approche
comportementale. Toutefois, la modélisation interne de l'environnement et la
planification en fonction des buts, comme réalisés par le module de cognition, sont
deux possibilités retenues dans SIR et qui n'étaient pas présents dans l'approche
comportementale. Mais ces capacités ne se trouvent pas à la base du mécanisme de
décision car le module de cognition n'est pas le seul à contrôler les intentions de
l'agent. Lors de la conception, il faut alors porter une attention particulière aux
interactions entre les modules et sur la nécessité de synchroniser leurs actions.
Par rapport à la vision distribuée de l'intelligence, celle-ci est présente à deux
niveaux dans SIR. Tout d'abord, un agent peut utiliser une architecture comme S IR
pour son contrôle. La problématique consiste alors à faire travailler plusieurs agents
ayant leur propre personnalité, connaissances, et intérêts en société ou dans des
tâches collectives [23, 107, 130, 149, 196, 197]. Ensuite, la distributivité peut être
considérée au niveau des modules internes de SIR. Chacun des modules de SIR ou de
224
leurs constituants peut aussi être mis en oeuvre sous forme d'un processus
indépendant. De telles situations devraient être étudiées plus en détail avec une mise
en oeuvre distribuée de SIR.
Enfin, le principe d'intelligence par émergence de fonctionnalité se trouve
directement à la base de SIR de par l'emploi de comportements pour le contrôle des
actions de l'agent. En plus, l'émergence est préservée et utilisée dans les différents
modules de SIR, comme il fut discuté en 9.3. Mais par rapport aux quatre principes
associés à l'approche comportementale de la section 2.1.4, SIR va un peu plus loin en
considérant que l'intelligence est affectée par ses expériences en plus de passer par
les yeux de l'observateur.
10.1.2. SIR et ses similitudes avec les approches actuelles en contrôle intelligent
Une grande source d'inspiration pour la réalisation présentée dans cette thèse et la
conception de SIR provient de recherches en logique floue. Tout d'abord, l'utilisation
simultanée et fusionnée de plusieurs modes de contrôle est réalisée par logique floue
dans plusieurs approches [37, 79, 101, 84, 87, 168]. Le principe de règles contextuelles
floues [30, 91], de bases de règles actives [181] ou encore par des méta-règles utilisées
pour sélectionner les bases de règles [221] affichent aussi de grandes similitudes avec
ce procédé. De plus avec SIR, si l'effet de l'indésirabilité sur le choix des
comportements n'est pas considéré, alors les conditions de recommandations
favorables à un comportement forment un antécédent supplémentaire ajouté aux
règle de ce comportement. Ce principe fut proposé par Berenji [30, 110]. Avec SIR,
cet antécédent est plus général car il résulte de la conjonction de conditions variées,
l'activation de plusieurs règles (cognitives, de situation externe ou de besoins), et
l'opération de sélection considérant leur indésirabilité.
225
De ce fait, c'est l'architecture proposée par Saffiotti et al. [170, 171, 172] qui
présente le plus de similitude avec SIR et les mécanismes de mise en oeuvre présentés
dans cette thèse. Cette approche utilise une mesure de désirabilité pour sélectionner
dynamiquement des comportements flous avec un mécanisme de fusion par
défuzzification. L'approche est qualifiée de context-dependent blending of behaviors.
Un mécanisme semblable fut utilisé lors des expérimentations pour le module de
comportements de SIR. De plus, les règles des comportements URGENCE, ÉVITER et
VITESSE ont toutes été inspirées de leurs travaux [171].
Malgré ces similitudes importantes, les différences entre l'architecture de Saffiotti
et celle de SIR sont nombreuses. Pour assurer une bonne intégration de la
planification et de la réactivité, Saffiotti utilise une représentation commune à partir
d'un module de perception local (Local Perceptual Space) pouvant exploiter une carte
de l'environnement et servir à établir des buts et les transmettre à des
comportements. L'information de ce module permet d'utiliser des formes abstraites et
déduites pour le contrôle réactif à l'interne des comportement et pour leur activation.
L'architecture arrive ainsi à gérer les plans tant au niveau délibération qu'au niveau
réactif [172]. Ceci pourrait être reproduit au niveau du module de cognition et de ses
interactions possibles avec le module de comportements, mais diffère de ce qui fut mis
en oeuvre ici. Il fut préféré d'utiliser un mode perceptuel moins évolué sans
information a priori ou de réactions à des sensations abstraites pour démontrer la
possibilité de former d'une façon autonome des connaissances sur l'environnement
avec un mécanisme différent. De plus, Saffiotti considère une vision hiérarchique de
l'intelligence où la planification est influencée par ce qu'un usager pourrait
demander du système. Avec SIR, la recommandation de comportements n'est pas
simplement influencée par la situation externe et la cognition mais aussi par les
besoins, en considérant l'indésirabilité en plus de la désirabilité des comportements.

226
Avec l'emploi des motifs et ses capacités introspectives, la gestion des buts du système
s'y effectue d'une façon complètement autonome.
D'autres similitudes peuvent être tirées des approches en contrôle intelligent
basées sur la logique floue. L'approche conceptuelle de Lavrov [111] est elle-aussi
basée sur l'adaptation dynamique d'une structure modulaire en utilisant un méta-
contrôleur cherchant à construire dynamiquement une configuration de contrôle en
activant uniquement les blocs de règles pertinents. Les principales différences avec
SIR se situent au niveau des modules propres aux états internes de SIR et du méta-
contrôleur, ainsi que dans la structure modulaire utilisée pour le contrôle des
actuateurs (soit au niveau comportementale de SIR).
Parmi les approches ne considérant pas la logique floue, il y a celle de Donnart et
Meyer [57] qui affiche certaines similitudes avec SIR. L'architecture est composée
d'un module réactif, d'un module de planification, d'un générateur de contexte (pour
anticiper des résultats et prédire les fautes), d'un module de récompenses internes
(pour l'apprentissage par renforcement des règles) et d'un module d'auto-analyse
(pour le module de planification). L'ensemble résulte en une architecture où l'état de
motivation en tout temps dépend de son état interne, sa perception du monde externe,
les conséquences de son comportement actuel et sur les conséquences prévues de son
comportement futur. L'approche est très différente de SIR au niveau des principes et
des modules, mais elle est similaire au niveau de l'objectif d'exploiter les motivations,
le contexte, la réactivité, la planification et l'auto-analyse comme composantes de la
politique de contrôle.
10.2. SIR et les théories en psychologie

227
Sans avoir une connaissance approfondie de la psychologie, il est possible d'établir
des liens entre SIR et les théories psychologiques [56] concernant le comportement
humain. L'utilisation des motifs et de l'introspection dans SIR peuvent s'associer à la
théorie de la personnalité de Freud qui met l'accent sur l'importance des motifs et des
conflits inconscients dans la détermination du comportements. Les théories des
besoins de Maslow et Rodgers considérant l'importance de la conscience humaine, la
connaissance de soi et l'aptitude à opérer des choix en mettant l'emphase sur le
présent, s'y trouvent aussi reproduites par les modules de besoins, de motifs et de
situation externe globale de SIR. Enfin, les théories cognitives considérant le
comportement comme étant plus qu'une simple réponse aux événements de
l'environnement (car ces derniers sont traités par l'organisme avant même d'être
transformés en comportements) ont des liens avec les modules propres aux états
internes de SIR.
Il existe aussi des similitudes entre SIR et les théories de la motivation [56], soit les
théories de contenu et les théorie de processus. Une théorie de contenu souligne les
facteurs internes qui dynamisent le comportement. Elle cerne la nature des besoins
ainsi que le rôle de ceux-ci dans le démarrage d'un cycle de motivation et qui incite
un individu à adopter une attitude ou un comportement particulier. Une attitude est
une prédisposition stable et apprise affectée par des composantes cognitive, affective
et comportementale et qui guide les comportements. Les théories de contenu de
Maslow, Porter, Alderfer [56] peuvent donc être associées au rôle du module de besoins
et du module de motifs dans SIR.
Contrairement aux théories de contenu où l'activation d'un comportement
s'effectue automatiquement par l'activation d'un besoin qui cherche satisfaction, les
théories de processus étudient comment ces forces interagissent avec
l'environnement et quels sont les facteurs qui amènent l'individu à adopter un

228
comportement plutôt qu'un autre [56]. La théorie des attentes de Vroom [56] indique
que l'individu effectue un choix conscient et délibéré des moyens lui permettant
d'atteindre ses objectifs. L'évaluation des alternatives possibles et de leurs
conséquences lui permettent de prendre une décision fondée sur des considérations
liées aux particularités de la nouvelle situation dans laquelle il se trouve. La théorie
affirme que l'individu évaluera et choisira parmi un ensemble de comportements
celui qui est le plus approprié et qui lui permettra d'obtenir les récompenses
auxquelles il attache une certaine importance ou une certaine valeur. Il y a aussi la
théorie behavioriste [56] qui soutient que la détermination du comportement, au lieu
d'être rationnelle et basée sur des motifs intrinsèques, est dictée seulement par leurs
conséquences. Cette sélection de comportements est à la base de SIR, et les modules
propres aux états internes de SIR permettent de délibérer sur leur choix en fonction
de différents facteurs rattachés à ces théories.
10.3. SIR et l'intelligence considérée dans sa globalité
SIR est en mesure d'expliquer et d'intégrer l'ensemble des caractéristiques
associées à l'intelligence telles que présentées à la section 2.3. Elle permet aussi de
prendre en considération les contraintes environnementales, physiques, internes et
les limitations des mécanismes de décisions pour tenter de donner une politique de
contrôle la plus "intelligente" possible au système. Les justifications de ces aspects
ont été réparties sur l'ensemble des chapitres de cette thèse et ne sont pas reproduits
ici. L'objectif de cette section est de montrer en quoi SIR arrive à aller plus loin au
niveau des critères associés à l'intelligence.
En plus de permettre l'unification de plusieurs caractéristiques associés à
l'intelligence tout en respectant leurs principes sous-jacents, SIR permet de
progresser vers la reproduction artificielle de l'intelligence en bénéficiant d'une

229
faculté importante pour l'intelligence, soit l'introspection. Cette capacité d'auto-
observation fut prouvée utile, par les résultats présentés au chapitre 9, pour donner
une autonomie et une capacité d'adaptation supérieure à l'agent. L'introspection est
une capacité importante à reproduire au niveau des systèmes car elle contribue à la
compréhension des mécanismes de raisonnement humain, de ses émotions et de la
conscience.
10.3.1. SIR et l'explication du raisonnement humain
C'est à partir de l'observation de ses actions, de ses connaissances et de ses décisions
que l'humain est capable d'expliquer, dériver des sens et des contextes, de s'étudier et
d'évoluer. Au niveau cognitif, cette auto-observation explique possiblement pourquoi
l'humain arrive effectivement à déduire des formes de raisonnements logiques et
symboliques (le raisonnement symbolique n'est qu'une explication symbolique de ce
comment est perçu les méthodes de raisonnement), d'expliquer consciemment ses
réactions et de poser lui-même des réflexions sur ses propres intervenants dans le
processus "intelligent" de décision. Cette forme d'introspection reste quand même de
haut niveau et ne s'attarde pas vraiment aux mécanismes de mise en oeuvre, même si
elle en est influencée (l'humain n'est pas conscient de ses activités neuronales). Cette
capacité humaine est en fait à la base de la psychologie et sert d'origine à plusieurs
approches de IA. La mémorisation, l'apprentissage, l'histoire et l'expérience du
système jouent certainement un rôle à ce niveau.
Les expérimentations réalisées sont quand même restées très limitées sur ces
possibilités. La mémorisation, l'anticipation et la reproduction de conditions
particulières (recommandations, motifs), ainsi que la sélection des noeuds utiles lors
de l'optimisation au niveau du graphe topologique font parties de ce type de
fonctionnalité. Ceci permet au système de se former de façon autonome une
compréhension de son influence sur l'environnement, de l'impact de ses intentions et
230
actions sur celui-ci, ainsi que des principes de fonctionnement de cet
environnement. Mais il reste possible d'aller beaucoup plus loin à ce niveau en
fonction des spécifications requises pour le système à contrôler, et l'architecture de
SIR s'y prête bien. La formation de symboles à partir du comportement émergent [44,
78, 212] sont des aspects intéressants à étudier à ce niveau.
10.3.2. SIR et les émotions
Un domaine qui risque de prendre plus d'importance en IA concerne l'étude des
motivations et des émotions. Ce sont des aspects importants de l'esprit perçu comme
un système de contrôle, et leur développement amèneront une compréhension plus
profonde sur comment les états émotionnels et motivationnels surviennent, l'humeur,
les attitudes, la personnalité, etc. [190]. Il existe des théories émotives en IA depuis
1962 [153, 155]. Simon [186] fut un des premiers à croire que les motivations et les
émotions se doivent d'être incorporées dans des systèmes de traitement de
l'information, de par leurs influences majeures dans le comportement humain. I l
peut être maintenant intéressant de voir les liens entre la connaissance actuelle des
émotions et les fonctionnalités disponibles de SIR.
Malgré l'absence de théorie véritable des émotions au sein duquel on donne à
l'émotion sa place propre parmi d'autres composantes comme le traitement de
l'information et l'adaptation (Frijda [165]), on peut dénombrer plusieurs théories des
émotions (Strongman en présente une trentaine [201]). Ces théories peuvent être
classifiées de la façon suivante [201]:
- Théories basées sur la motivation et la physiologie. La plupart des théoriciens
contemporains sur la motivation croit que la motivation et l'émotion sont
intimement reliée [25]. Selon Izard et Buechler [161], les émotions sont des
motivateurs et des organisateurs de comportements, et ont donc un rôle
fonctionnel. La théorie de Young [201] soutien que l'émotion est une sorte de

231
continuum (avec un signe, une intensité et une durée) qui devient une
motivation, soit un régulateur de comportement en les activant, les soutenant et
les organisant. L'évaluation hédonistique (plaisant/déplaisant) serait un facteur
associé à cette vision des émotions [25, 165]. Mais il n'y a pas de réponse simple
pour définir la relation motivation-émotion [138];
- Théories comportementales, qui considèrent que l'émotion dépend de la nature
du stimuli de renforcement et des complexités du conditionnement classique
[201];
- Théories cognitives. L'essence de toute approche cognitive à l'émotion est que
l'émotion dépend de l'interprétation de la situation [25, 138, 161] en lui attribuant
des causes [138] pour en évaluer sa pertinence et rendre flexible l'adaptation du
comportement par évaluation cognitive [201]. On considère aussi la cognition et
l'émotion comme des deux processus indépendants mais interagissant, et dont
leur importance relative doit être balancée [201];
- Théories générales qui tentent de regrouper l'ensemble des principes associés
aux émotions. Les émotions se caractérisent autant par des processus cognitifs
(pour leur détermination) que par des qualités motivationnelles (qui cause des
réponses émotionnelles) [165]. Par exemple, Leeper perçoit l'émotion comme
une force active impliquant la motivation et la perception cognitive, qui
organise, soutient et dirige le comportement [201]. Mais l'émotion n'est pas
l'équivalent conceptuel direct de la cognition et de la motivation: elle se situerait
plutôt à un niveau supérieur [165].
SIR permet de considérer l'aspect motivationnel des émotions en les considérant au
niveau des motifs et leur influence sur les recommandations. L'aspect cognitif est
aussi considéré par les évaluations pour inférer de la DÉTRESSE ainsi que les motifs
affectés par le module de cognition. Le conditionnement n'est pas une optique

232
considérée lors des expérimentations, mais pourrait se mettre en oeuvre en
considérant l'apprentissage de motifs avec SIR.
L'expérience [146] et l'auto-évidence [161] sont le sine qua non (condition
essentielle) des émotions. L'expérience émotionnelle est la cause du comportement
émotionnelle, et l'expérience émotionnelle est elle-même réponse: elle consiste en
une rétroaction en provenance de la réponse corporelle [165, 201]. Ce sont des
expériences privées, survenant seulement dans le contexte d'une personne qui se
comporte dans une situation [161]. L'émotion résulte ainsi d'un traitement
d'informations au cours duquel intervient l'évaluation de la signification des
stimulations ou événements du milieu [69] par rapport à la poursuite d'objectifs ou de
préférences, la préparation physiologique et psychologique des programmes
énergétiques et moteurs aux actions propres à répondre à ces stimulations du milieu
en vue d'une meilleure adaptation [165]. Sous cette optique, les processus émotionnels
servent de point d'intersection entre les situations et événements perpétuellement
changeants du milieu et l'organisme [165], et tente de trouver un équilibre entre les
intérêts de l'organisme et l'environnement [69]. L'adaptabilité du comportement [157]
des organismes à leur milieu est due en grand partie au système émotionnel en
substituant des modes de comportement plus flexibles aux modèles réactionnels
réflexes stéréotypés et aux mécanismes déclencheurs instinctifs et innés (Frijda
[165]). Elles viennent donc déplacer le contrôle [145] en activant et organisant les
comportements [161] ou gérant l'allocation de ressources [69]. Ces propriétés peuvent
être expliquées par les exigences d'un système qui gère de multiples composantes,
tente d'atteindre des buts multiples et opère en milieu incertain [145, 165]. Pour les
organismes ayant à gérer un grand répertoire flexible de comportements qui doivent
évoluer en parallèle, les émotions font parties des capacités de contrôle en
influençant la focalisation de l'attention, la mise en place de priorités selon
différentes modalités d'évaluation de stimulation et sous les différentes alternatives

233
du comportement, à gérer l'interruption et l'action, contrôler l'adéquation constante
entre les actions de l'organisme et les événements extérieurs, et le partage de temps
que cela implique [146, 165].
L'émotion est donc définie par sa dépendance à l'égard de la planification [145], de
la détermination des buts et de la motivation [165]. Elles peuvent affecter la mémoire
[146, 201], activer des opérations cognitives (et l'inverse), servir de moyen de
communication entre les processus [145], causer des actions expressives (et l'inverse),
affecter les actions dirigées-buts, les intentions, devenir des buts [138], activer les
modules pendant un certain temps, interagir socialement [165, 186] par l'élaboration
de plans mutuels [145], assurer la réalisation de buts en examinant la réussite et les
fautes [69]. De plus, les émotions peuvent inférer de nouvelles émotions [146]
(certaines théories indiquent qu'ils existeraient de six à dix émotions primiaires [25])
ou s'inhiber entre elles [145] (en les conceptualisant sous forme de pairs polaires
opposés [161] ou par des mécanismes d'égo-défenses qui sont des stratégies pour
traiter les conflits entre émotions de façon inconsciente [161]). Certains les voient
comme des propriétés émergeantes [24, 161], i.e. qu'elles n'ont pas d'états spécifiques à
l'interne: elles émergent du système de valeur et de l'auto-organisation [155, 157].
L'ensemble de ces caractéristiques ont été reproduites lors des expérimentations
avec SIR de par les motifs et leur rôle au niveau des sources de recommandations. Les
motifs comme EXPLORER, EXPLOITER et ENNUI et leur inter-influences démontrent
l'importance des influences entre motifs pour la gestion de buts multiples et de
trouver un équilibre des buts en fonction des capacités et des connaissances de
l'agent. L'ensemble des motifs permit aussi de gérer adéquatement un répertoire de
comportement devant s'adapter à diverses situations dans un environnement
inconnu. Tous ces motifs sont influencés par l'expérience de l'agent dans son
environnement mais aussi par son auto-observation, reproduisant la double
234
influence des motifs sur l'expérience (son contrôle et son affectation). Mais le niveau
d'"émotivité" démontré lors des expérimentations reste très limité, et des schémas
d'interaction plus complexes devront être mis en oeuvre avant de pouvoir affirmer
avoir reproduit d'une forme d'émotivité respectable pour la machine.
10.3.3. SIR et la conscience
Le Petit Larousse définit la conscience comme la perception plus ou moins claire
des phénomènes qui renseignent sur la propre existence d'un organisme. Il existe
des chercheurs comme Selfridge et Franklin [179] pour qui la conscience est
considérée comme essentielle pour l'intelligence. Pour certains, la conscience serait
une illusion causée par notre auto-observation [44] et ne doit pas être spécifiquement
programmée: elle émerge [41]. Pour d'autres, ce qui est disponible pour le
raisonnement (comme des faits logiques) correspond à la conscience, et l'observation
de la conscience correspond à l'introspection [132]. Schank croit en la même
possibilité car il mentionne qu'un expert est un être conscient de lui-même: il sait
quand il connaît quelque chose, et peut porter des observations sur ce quoi il connaît
[176]. Wojcik [215] indique pour sa part que pour être intelligent, il faut être
conscient de ses influences et son rôle (être self-aware). D'un point de vue
psychologique, Hunt [89] indique que chez l'humain, la plupart de la pensée prend
lieu à l'extérieur de la conscience mais les résultats de ce processus deviennent
conscients. L'humain ne fait pas que penser, il se perçoit en train de penser: le
miracle ultime et le plus créatif de notre esprit est qu'il est conscient de lui-même. La
possibilité de reproduire la conscience dans la machine est aussi une question qui est
abordée en philosophie, comme l'argumente Sloman [190, 133].
Une constance dans ces visions est que l'auto-observation est essentielle pour
reproduire la conscience. L'introspection est en fait définie comme l'étude de la
conscience par elle-même, du sujet par lui-même. Turing [132] aurait même indiqué

235
que la machine devrait être en mesure, en observant les résultats de son propre
comportement, modifier ses programmes pour réaliser un objectif plus efficacement.
La difficulté est que lorsqu'un système s'observe, il peut venir interférer avec ses
propres observations et il doit donc être conscient de son impact possible sur
l'environnement [160]. Un modèle de soi semble être requis. Sous l'aspect des
émotions, Oatley et Jonhson-Laird [145] indiquent qu'un modèle de soi doit comporter
deux dimensions: la première s'intéresse à ce que peut faire l'individu et ses buts
propres; la seconde contient l'abstraction de ce qu'il a expérimenté par rapport à son
environnement et aux autres. De la même façon, l'émotion jouerait un rôle au niveau
de la conscience. Pour pouvoir ressentir des émotions, la machine doit être
consciente [146], et la conscience est organisée par les émotions fondamentales qui
donnent une direction et un focus aux processus de sensation, perception et cognition
[161].
Avec SIR, le système est en mesure d'observer ses processus en action, et non
seulement ses résultats. L'agent prend alors conscience par lui-même de l'influence
de l'environnement, de l'influence de son mécanisme de sélection sur ses
performances ainsi que de l'influence de ses actions sur l'environnement. Le niveau
de conscience validée expérimentalement dans cette thèse reste quand même très
limitée, mais SIR présente du potentiel pour aborder ces aspects au niveau des
systèmes. Cette fonctionnalité est un des avantages important de SIR pour la mise en
oeuvre de l'intelligence.
10.4. Extensions futures
Pour valider davantage SIR et ses principes de fonctionnement, plusieurs études
peuvent être entreprises. Ces études dépendent du domaine d'application ou de
l'environnement dans lequel SIR et le système à contrôler devront évoluer. La suite
236
logique d'application consiste à utiliser SIR pour le contrôle de robot réel. Une telle
mise en oeuvre peut reprendre les mécanismes présentés dans cette thèse et les
adapter aux différentes contraintes associées à cette problématique. D'autres champs
potentiels d'application sont les expérimentations de groupe d'agents [130, 149], les
environnements virtuels pour la création d'interface homme-machine "intelligente"
et la domotique [137]. L'application de SIR dans des applications diverses demandera
certainement l'étude de fonctionnalités et de mécanismes différents de ceux présentés
dans cette thèse. Les prochaines sous-sections présentent les extensions possibles de
SIR concernant ses mécanismes de mises en oeuvre, la validation de l'ensemble de ses
liens entre les modules, et pour l'apprentissage.
10.4.1. Extensions au niveau des mécanismes de mise en oeuvre
Comme il fut soulevé à la section 10.1, plusieurs autres techniques peuvent être
utilisées au niveau des modules de SIR. Le choix de ces mécanismes sont directement
influencés par le type d'application considérée.
Au niveau des motifs, l'observation de la durée d'exploitation (pour la fatigue
[173]), d'inutilisation (pour l'impatience [173]), ou d'interruption continuelle d'un
comportement pourraient servir. Un mécanisme d'adaptation des rythmes de
variations de certains motifs comme le fait Steels [199] serait aussi utile. Un tel
mécanisme semble bénéfique dans les problématiques similaires à celle étudiée par ce
chercheur et McFarland reproduisant un éco-système où il y a une compétition
d'énergie dans l'environnement entre les agents [135, 196, 197, 198]. Un agent est
dans une position où la survie des autres agents est une condition pour sa propre
survie, le forçant à la coopération malgré la compétition. L'histoire de l'agent
affecterait ainsi ses connaissances ainsi que sa personnalité.

237
Au niveau du module de besoins, a gestion de besoins selon l'utilité de variables
d'états endrogènes, en considérant la fatigue et l'inhibition, pourrait être utile [34],
tout comme l'utilisation de fonctions d'utilité et de coût [134, 136]. L'adaptation de la
fonction de coût en fonction de l'histoire personnelle de l'agent [136] est aussi une
possibilité.
Au niveau du module cognitif, un module similaire au module perceptuel local de
Saffiotti et al. [170, 171] pourrait être bénéfique pour combiner des informations a
priori à celle acquise par le système. Des approches floues pour la planification à
partir de carte [218] et de graphe [202] ou pour caractériser les situations par états
flous [118, 202] pourraient aussi être exploitées, tout comme l'emploi de règles floues
pour la recommandations de comportements. Le module de cognition pourrait aussi
bénéficier des techniques de délibération en tout temps [73]. Toute extension pour
permettre la communication entre agents (par des comportements de transmission et
de réception par exemple) ou par le biais d'une interface homme-machine seraient
aussi bénéfique pour le module de cognition.
Au niveau de graphe topologique, l'utilisation d'un RNA récurrent avec unités de
contexte comme le fait Tani [203] pour apprendre des structures grammaticales
cachées dans la géométrie de l'environnement à partir des entrées sensorielles et ses
expériences de navigation, pourrait être utile pour la formation de connaissances ou
l'apprentissage d'expressions lexicales. Une meilleure distinction des noeuds dans le
graphe topologique pourrait être réalisée en employant un système de vision plus
évolué pour assigner des indices visuels au noeud (comme le fait [106]), ou encore par
l'emploi de marqueur pour discriminer les noeuds lors d'exploration (comme le fait
[58]). L'approximation de la longueur et de la rotation en fonction de la vitesse des
roues d'un robot mobile peut aussi renforcer la caractérisation des noeuds. De plus,
les cibles pourraient être identifiables en permettant la perception d'une étiquette
238
par l'agent afin de regrouper les noeuds associés à une même cible, et faciliter la
localisation dans le graphe topologique. Des méthodes pourraient aussi être incluses
pour détecter ou reconnaître la mobilité d'un obstacle dans l'environnement, et s'en
servir pour une meilleure localisation dans le graphe topologique. Enfin, des
analyses plus complexes au niveau du graphe topologique lors de l'optimisation,
considérant une forme de rétrospection [189] sur les résultats obtenus, seraient une
autre forme d'introspection cognitive intéressante à valider avec SIR.
Enfin, l'étude des mécanismes utiles pour SIR et son utilisation dans différentes
applications permettront ensuite de définir des standards de développement (langage,
répertoire d'outils) pour faciliter sa mise en oeuvre en fonction des besoins du
système.
10.4.2. Extensions au niveau des liens entre les modules de SIR
Quelques liens d'influence entre les modules de SIR restent encore à être validés.
Ces liens ne l'ont pas été car la nature de l'application proposée avec BugWorld ne s'y
prêtait pas, et qu'ils impliquent des niveaux d'intelligence associés avec des
fonctionnalités demandent des études plus approfondies. Tout d'abord, il reste à
valider le lien entre le module de motifs et le module de situation externe globale. Ce
lien pourrait s'avérer utile si une perception plus évoluée était utilisée par le module
de situation externe globale pour influencer les motifs, ou encore si les motifs
pouvaient influencer la perception ou le focus d'attention pour la situation
environnementale considérée dans les recommandations comportementales.
Ensuite, le lien du module de besoins vers le module de motifs ne fut point exploité.
L'utilisation de mécanismes comme les diagramme d'utilité ou des schémas de priorité
pourraient servir à valider une telle influence. Par exemple, la fatigue pourrait être
associée à la poursuite sans relâche d'un besoin particulier.

239
Enfin, l'influence entre le module de motifs et le module de sélection finale doit
aussi être validée avec des systèmes demandant par exemple l'établissement de
priorité entre les sources de recommandations à partir de valeurs. Un agent devant
être plus rationnel (priorité au module de cognition), plus instinctif (priorité au
module de situation externe globale), ou plus égoïste ou émotif (priorité au niveau des
besoins) pourrait bénéficier d'une telle influence. Des règles de valeurs pourraient
aussi modifier l'importance des sources de recommandations sur le choix des
comportements. Parker semble exploite aussi un mécanisme de valeurs comme
l'égoïsme, l'impatience et la paresse pour dériver les intentions [148, 149]. La
possibilité d'utiliser des règles de pondération dans le module de sélection finale
viennent en fait justifier l'emploi du mécanisme flou de sélection pour la mise en
oeuvre présentée dans cette thèse. Mais un processus d'activation différent peut très
bien être utilisé, comme l'emploi de neurones de combinaison de recommandation
utilisant un opérateur maximum de combinaison des entrées et pour la soustraction
des influences de désirabilité et d'indésirabilité (comme le fait le module de sélection
finale dans sa mise en oeuvre actuelle) avec des poids variables pondérant leurs
influences. Comme influence allant du module de sélection finale au module de
motifs, une mesure d'excitation basée sur la somme de la désirabilité et l'indésirabilité
comme proposée par Ortony et al. [146] pourrait affecter un des motifs reflétant
l'anxiété et la perturbation de l'agent (si trop excité) ou son intérêt et sa vigilance (si
peu excité). La charge environnementale décrit alors l'environnement en terme
d'excitation [146]. Enfin, des règles évaluant l'impact des différentes sources de
recommandations sur la désirabilité effective des comportements pourraient aussi
affecter les motifs.
10.4.3. Extensions pour l'apprentissage au niveau des modules de SIR

240
L'apprentissage concerné ici est propre aux politiques de contrôle utilisées par les
différents modules de SIR, et non pour la formation de connaissances à partir des
interactions avec l'environnement. Avec SIR, il fut supposé qu'une expertise initiale
est transférée par le concepteur pour que le système puisse interagir avec son
environnement avec un minimum de capacités. Un tel choix place SIR au coeur du
débat concernant le compromis entre ce qui doit être programmé et fixe dans la
machine versus ce qu'elle doit apprendre. Ce compromis dépend de l'approche, de nos
capacités de lui transmettre et des risques associés à l'apprentissage [179]. Le
problème principal est de trouver un mélange de connaissances et de savoir-faire
implicites et acquis qui permettent au système d'atteindre le maximum d'adaptation
dans sa niche [134], et c'est ce compromis qui est considéré avec SIR.
L'éducation de l'agent se fait donc ici par transfert direct d'expertise au lieu de se
faire par de longues séries d'expérimentations pratiques. Mais même si ceci ne fut
pas validé au cours des expérimentations, SIR n'exclut pas la possibilité de réaliser un
apprentissage à différents niveaux. L'approche permet en fait d'identifier et
d'organiser un contexte de recherches où différentes techniques d'apprentissage
pourraient être exploitées selon leur utilité et le rôle des modules. L'apprentissage
pourrait se faire au niveau des comportements, leur niveau d'influence étant affectée
par les sources de recommandations et les motifs. Le choix des comportements par les
sources de recommandations pourrait aussi être appris, tout comme l'ajustement des
motifs et leur influence sur les autres modules pour une meilleure gestion des
interactions. Les connaissances acquises du module de cognition pourraient aussi
servir à initialiser de nouveaux comportements et superviser leurs ajustements, ou à
regrouper des comportements pour en former de nouveaux. De cette façon,
l'apprentissage pourrait se faire avec SIR du bas vers le haut et du haut vers le bas,
comme le veulent Fukuda et Shibata [70, 71].

241
L'apprentissage par renforcement [98, 99] semble offrir des possibilités
intéressantes pour SIR. Un système qui doit apprendre à agir dans le monde par
essais-erreurs fait face à un problème de renforcement [96]. Les algorithmes à
renforcement arrivent à apprendre la fonction de contrôle directement par
interaction avec l'environnement en utilisant les indications d'un critique. Le
renforcement se base sur un signal simple, n'exploite pas de connaissances explicites
et généralise de l'expérience passée de façon incrémentale à partir d'un masse
d'informations diffuses, inexactes et inconsistantes [150]. Le renforcement est aussi
lié et aux théories d'apprentissage comportemental chez les animaux et les humains
[125].
Des approches d'apprentissage par renforcement pour des comportements ont été
développées par Mahadevan et Connell [124, 125], Holland et Snaith [88], Digney et
Gupta [54, 55], et Mataric [131, 130]. Mais certains algorithmes d'apprentissage par
renforcement se révèlent inefficaces [96] de par la difficulté d'exploiter des
connaissances de base et lorsque le problème est de grande dimension et complexe
[125]. L'utilisation de RNA flou couplé avec le renforcement [31, 32, 116] pourraient
être une solution adéquate à ce problème. Enfin, les recherches futures sur
l'apprentissage focusseront entre autres sur l'apprentissage de haut niveau, soit
comment modifier la fonction d'objectif en cours de foncitonnement pour rechercher
de meilleures performances dans certaines situations, et la fusion de l'adaptation et de
l'apprentissage [19]. Les fonctionnalités variées de SIR pourraient apporter une
contribution intéressante à ce niveau.
242
CONCLUSION
L'objectif principal de cette thèse fut de présenter une nouvelle architecture de
contrôle intelligent nommée SIR qui tente d'unifier les différents aspects rattachés à
l'intelligence pour sa mise en oeuvre dans des systèmes. SIR fut étudiée à deux
niveaux, soit au niveau conceptuel pour présenter l'architecture dans sa généralité,
et le niveau de mise en oeuvre démontrant l'utilité et les mécanismes possibles pour
ses modules. L'élaboration conceptuelle de cette architecture fut basée sur les
approches actuelles en contrôle intelligent, ainsi que sur les principes
psychologiques jugés importants concernant l'intelligence. Tout au long de la thèse,
il fut tenté de bien identifier les différentes influences venant de ces sources. Les
fondements de SIR reposent sur une vision de l'intelligence qui ne s'attardent pas
tant sur ses caractéristiques ou sa définition, mais plutôt sur les interactions avec
l'environnement et les capacités du système pour la réalisation de ces interactions.
SIR considère que l'intelligence se manifeste par la sélection intentionnelle et
dynamique des comportements définissant les capacités d'actions d'un agent. SIR fut
validée pour une application simulée de robot mobile, démontrant l'ensemble des
principales fonctionnalités rattachées à cette architecture. Par la démonstration au
niveau conceptuel de SIR et de ses liens avec de nombreux ouvrages en contrôle
intelligent, en IA et en psychologie, il fut possible de démontrer sa généralité, sa
flexibilité et sa contribution dans l'unification des principes associés à l'intelligence.
Les principales nouveautés associées aux travaux présentées dans cette thèse
s'expliquent bien à partir des hypothèses sur l'intelligence servant de fondements à
SIR. Ces hypothèses et ces explications sont:
- L'intelligence se forme à partir de comportements. Ces comportements
permettent de décomposer un problème complexe sous forme de manifestations

243
externes requises, fixant les sensations et actions requises pour que le système
arrive à agir dans son environnement;
- L'intelligence est fonction du contexte. Ce contexte, pour des problèmes de haute
dimension, permet d'établir la pertinence des sensations et actions par la
sélection des comportements et l'exploitation de ces comportements;
- L'intelligence émerge d'un processus holistique. L'émergence avec SIR fut
considérée à différents niveaux, soit par la réactivité des comportements, la
fusion de leurs actions, la sélection dynamique de comportements et la gestion
des connaissances et des motifs;
- L'intelligence s'observe agir, penser et réagir. Cette capacité introspective
permet au système d'évaluer son propre fonctionnement et d'en affecter ses
performances. Elle s'avère un moyen efficace pour contrôler et gérer
l'émergence;
- L'intelligence est propre au système. Toute connaissance, observation ou
intention doit être déterminées de façon autonome par le système à partir de ses
propres capacités et de ses interactions avec l'environnement.
Le découpage en modules des comportements, de leur fusion, des sources de
recommandations externes, propres (besoins) et cognitives, de leur sélection et de la
supervision générale par les motifs arrivent à réaliser efficacement cette
intégration. Au niveau mise en oeuvre, les mécanismes présentés pour chacun des
modules ne doivent pas être perçus comme les seuls ou les plus performants. Ils se
sont toutefois avérés utiles et propices aux expérimentations. Mais l'intégration de
tous ces aspects et des différentes caractéristiques associées à l'intelligence
constituent le principal apport de SIR. Quelques nouveautés sont aussi présentes à ce
niveau: l'utilisation d'expressions lexicales pour identifier la rotation effectuée par
l'agent; l'observation de l'exploitation de comportements par une mesure floue; la
discrimination des comportements en fonction de leur type de règles; la modification
244
des antécédents et des conséquences par l'échange de paramètres internes venant du
module de cognition; et l'utilisation d'une échelle hédonistique pour formulation de
recommandations. Pour le reste des mécanismes, les influences principales viennent
de Saffiotti [170, 171] pour les comportements et leur sélection, Mataric [128, 129] pour
le graphe topologique et le comportement d'identification, et Maes [122] pour le
mécanisme d'activation de motifs. Le concept de scénarios comme méthodologie pour
décrire la fonctionnalité émergente souhaitée et la reproduire dans les modules de
SIR est aussi un concept nouveau dans la conception de système autonome. Enfin, la
modularité de SIR et la distinction des rôles de chacun de ses modules facilitent la mise
en oeuvre et le transfert d'expertise venant du concepteur de la politique de contrôle
"intelligente".
Toutefois, il est bon de rappeler à ce point qu'il n'est pas prétendu que S IR
reproduit avec exactitude le processus intelligent humain. SIR n'est pas présentée
non plus comme la seule et unique architecture pour la mise en oeuvre de
l'intelligence dans des systèmes. Elle ne vient pas non plus reproduire une théorie
psychologique particulière concernant l'intelligence, ni une description du
fonctionnement neurologique du cerveau (comme la théorie unifiée basée sur des
champs neuronaux dynamiques de [60]). Elle ne fut pas développée dans ces optiques.
Il faut se rappeler qu'il est peu probable que toute école de pensée, quelle soit
comportementale, gestalt, psychologie ou IA traditionnelle, soit entièrement
incorrecte [47], et que l'orchestration de la délibération et l'action automatique ouvre
la voie à de riches dialogues interdisciplinaires entre robotistes, psychophysiciens,
ingénieurs et biologistes qui ne peuvent qu'enrichir les disciplines à long terme [80].
Dans cette optique, SIR tente plutôt d'unifier un grand nombre de principes associés à
l'intelligence. L'intelligence est une notion encore mal comprise pour pouvoir
effectuer des tels jugements qui freineraient les discussions et les développements
d'un domaine de recherche encore jeune.

245
Cependant, les résultats obtenus sont encourageants et les explications données
démontrent que SIR est en mesure de prendre en considération les composantes
nécessaires pour transmettre une plus grande intelligence et une plus grande
autonomie à des systèmes. Elle vient aussi répondre aux critères du NIST [5] pour
l'évaluation d'une approche unifiée de l'intelligence, soit l'extensibilité, la
réutilisabilité, la modularité, la flexibilité, la robustesse, l'exploitation de plusieurs
comportements et l'indépendance de l'application. Finalement, étant donné que
l'objectif fondamental de l'architecture est de tenter d'unifier les concepts sur
l'intelligence, il est espéré que cette première mise en oeuvre de l'architecture
s'avéra un pas dans cette direction et qu'elle sera un point de départ important,
comme l'avait voulu Albus [6], pour initier les discussions et le développement de
systèmes manifestant une intelligence plus proche de l'intelligence humaine. S IR
peut servir à établir les fondements d'une théorie de l'intelligence pour des agents
intelligents vraiment autonomes, compatible avec les lois fondamentales de physiques
et biologiques et expliquant comment l'intelligence peut être réalisée à partir de
processus matériels non-intelligents [197, 198]. L'objectif à long terme de SIR est
d'améliorer la compréhension de la nature théorique et pratique de l'intelligence
dans les systèmes artificiels et naturels, ainsi que le développement de systèmes
intelligents utiles et commercialisables.

246
ANNEXE 1 RÉSULATS GÉNÉRAUX POUR LA PREMIERE EXPÉRIMENTATION AVEC
L'ENVIRONNEMENT DE BUGWORLD (HISTORIQUE 1)
a) 100 noeuds dans le graphe topologique
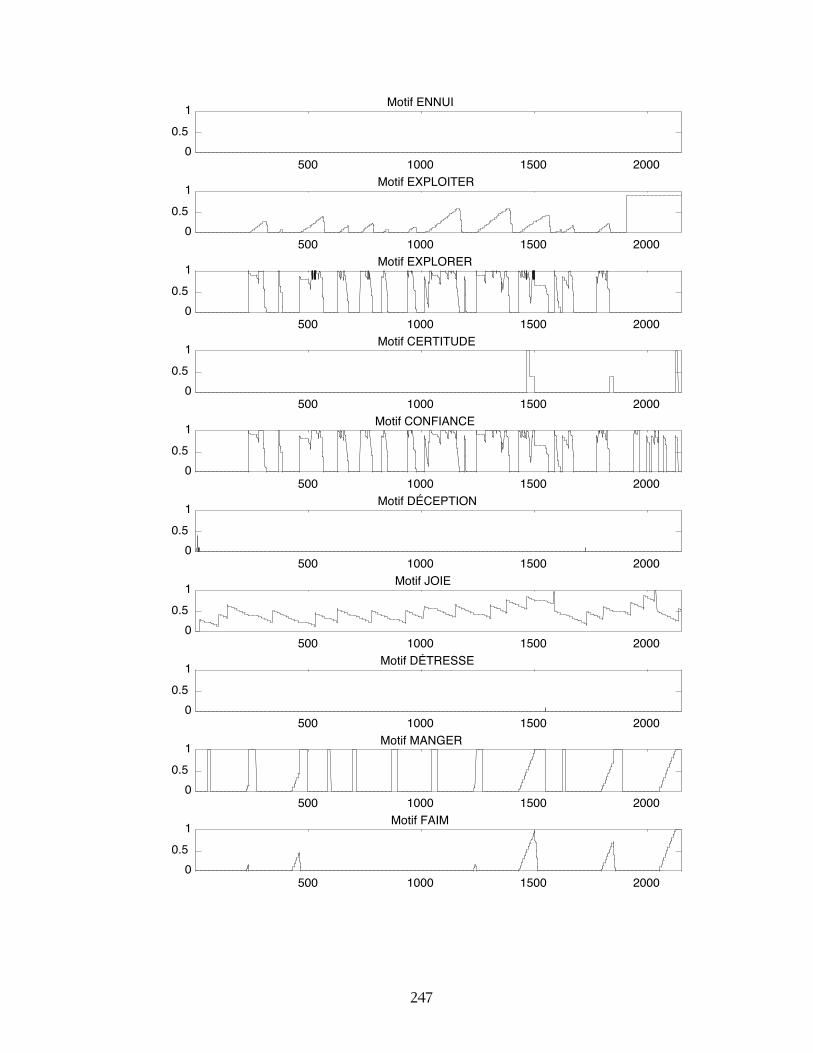
247
00.5
1
500 1000 1500 2000
Motif ENNUI
00.5
1
500 1000 1500 2000
Motif EXPLOITER
00.5
1
500 1000 1500 2000
Motif EXPLORER
00.5
1
500 1000 1500 2000
Motif CERTITUDE
00.5
1
500 1000 1500 2000
Motif CONFIANCE
00.5
1
500 1000 1500 2000
Motif DÉCEPTION
00.5
1
500 1000 1500 2000
Motif JOIE
00.5
1
500 1000 1500 2000
Motif DÉTRESSE
00.5
1
500 1000 1500 2000
Motif MANGER
00.5
1
500 1000 1500 2000
Motif FAIM
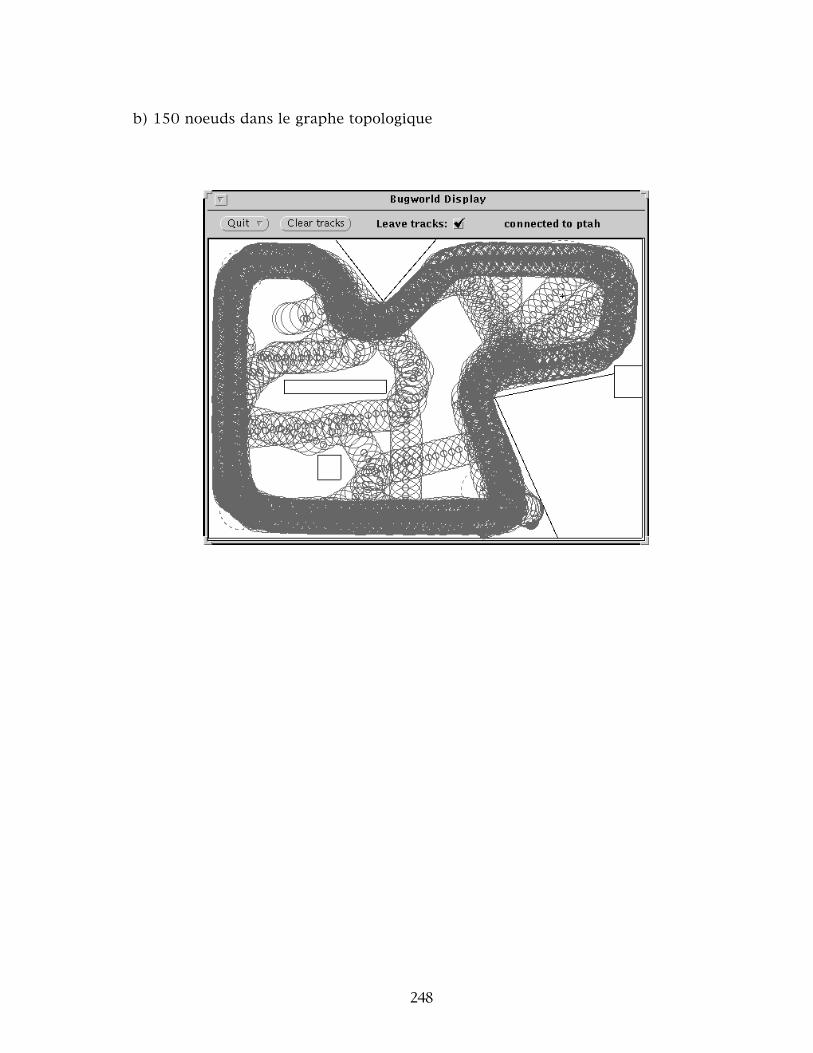
248
b) 150 noeuds dans le graphe topologique

249
00.5
1
500 1000 1500 2000 2500
Motif ENNUI
00.5
1
500 1000 1500 2000 2500
Motif EXPLOITER
00.5
1
500 1000 1500 2000 2500
Motif EXPLORER
00.5
1
500 1000 1500 2000 2500
Motif CERTITUDE
00.5
1
500 1000 1500 2000 2500
Motif CONFIANCE
00.5
1
500 1000 1500 2000 2500
Motif DÉCEPTION
00.5
1
500 1000 1500 2000 2500
Motif JOIE
00.5
1
500 1000 1500 2000 2500
Motif DÉTRESSE
00.5
1
500 1000 1500 2000 2500
Motif MANGER
00.5
1
500 1000 1500 2000 2500
Motif FAIM

250
ANNEXE 2 RÉSULATS GÉNÉRAUX POUR LA SECONDE EXPÉRIMENTATION AVEC
L'ENVIRONNEMENT DE BUGWORLD (HISTORIQUE 2)

251
00.5
1
500 1000 1500 2000
Motif ENNUI
00.5
1
500 1000 1500 2000
Motif EXPLOITER
00.5
1
500 1000 1500 2000
Motif EXPLORER
00.5
1
500 1000 1500 2000
Motif CERTITUDE
00.5
1
500 1000 1500 2000
Motif CONFIANCE
00.5
1
500 1000 1500 2000
Motif DÉCEPTION
00.5
1
500 1000 1500 2000
Motif JOIE
00.5
1
500 1000 1500 2000
Motif DÉTRESSE
00.5
1
500 1000 1500 2000
Motif MANGER
00.5
1
500 1000 1500 2000
Motif FAIM

252
ANNEXE 3 RÉSULATS GÉNÉRAUX POUR LA PREMIERE EXPÉRIMENTATION AVEC
L'ENVIRONNEMENT COMPLEXE (HISTORIQUE 3)

253
00.5
1
500 1000 1500 2000 2500 3000 3500 4000
Motif ENNUI
00.5
1
500 1000 1500 2000 2500 3000 3500 4000
Motif EXPLOITER
00.5
1
500 1000 1500 2000 2500 3000 3500 4000
Motif EXPLORER
00.5
1
500 1000 1500 2000 2500 3000 3500 4000
Motif CERTITUDE
00.5
1
500 1000 1500 2000 2500 3000 3500 4000
Motif CONFIANCE
00.5
1
500 1000 1500 2000 2500 3000 3500 4000
Motif DÉCEPTION
00.5
1
500 1000 1500 2000 2500 3000 3500 4000
Motif JOIE
00.5
1
500 1000 1500 2000 2500 3000 3500 4000
Motif DÉTRESSE
00.5
1
500 1000 1500 2000 2500 3000 3500 4000
Motif MANGER
00.5
1
500 1000 1500 2000 2500 3000 3500 4000
Motif FAIM
254
ANNEXE 4 RÉSULATS GÉNÉRAUX POUR LA SECONDE EXPÉRIMENTATION AVEC
L'ENVIRONNEMENT COMPLEXE UTILISANT L'OBSTACLE MOBILE (HISTORIQUE 4)

255
00.5
1
500 1000 1500 2000 2500 3000
Motif ENNUI
00.5
1
500 1000 1500 2000 2500 3000
Motif EXPLORER
00.5
1
500 1000 1500 2000 2500 3000
Motif EXPLOITER
00.5
1
500 1000 1500 2000 2500 3000
Motif CONFIANCE
00.5
1
500 1000 1500 2000 2500 3000
Motif CERTITUDE
00.5
1
500 1000 1500 2000 2500 3000
Motif DÉCEPTION
00.5
1
500 1000 1500 2000 2500 3000
Motif FAIM
00.5
1
500 1000 1500 2000 2500 3000
Motif DÉTRESSE
00.5
1
500 1000 1500 2000 2500 3000
Motif JOIE
00.5
1
500 1000 1500 2000 2500 3000
Motif MANGER

256
BIBLIOGRAPHIE
[1] Åström, K.J. et Wittenmark, B., Adaptive Control, Addison Wesley, 1989.
[2] Åström, K.J. et McAvoy, T.J., “Intelligent control: an overview and evaluation”, dans Handbook ofIntelligent Control. Neural, Fuzzy and Adaptive Approaches, White, D.A. et Sofge, D.A. (éd), Van NostradReinfold, 1992, chap. 1, p. 3-34.
[3] Agre, P.E. et Chapman, D., “What are plans for?”, dans Designing Autonomous Agents: Theory andPractive form Biology to Engineering and Back, Maes, P. (éd), The MIT Press, Bradford Book, 1990, p. 17-34.
[4] Aho, A.V., Sethi, R., et Ullman, J.D., Compilers, Principles, Techniques, and Tools, Addison Wesley,1988.
[5] Albus, J., Quintero, R., Lumia, R., Herman, M., Kilmer, R., et Goodwin, K., “Concept for a referencemodel architecture for real-time intelligent control systems (ARTICS)”, NIST technical Note 1277, avril1990.
[6] Albus, J.S., “A theory of intelligent systems”, dans Proc. Fifth Int'l Symposium on Intelligent Control,1990, p. 866-875.
[7] Albus, J.S., “The role of world modeling and value judgment in perception”, dans Proc. Fifth Int'lSymposium on Intelligent Control, 1990, p. 154-163.
[8] Albus, J.S., “Hierarchical interaction between sensory processing and world modeling in intelligentsystems”, dans Proc. Fifth Int'l Symposium on Intelligent Control, 1990, p. 53-59.
[9] Albus, J.S., “Outline for a theory of intelligence”, IEEE Trans. on Systems, Man, and Cybernetics, vol.21, no. 3, p. 473-509, mai-juin 1991.
[10] Albus, J.S., “RCS: A reference model architecture for intelligent control”, Computer, vol. 25, no. 2, p. 56-59, mai 1992.
[11] Almàssy, N., “BugWorld: A distributed environment for the development of control architectures in multi-agent worlds”, Tech. Report 93.32 (ftp anonymous, [email protected]), Winterthuresrtrasse 190, 8057Zurich, Suisse, décembre 1993.
[12] de Almeida, R. et Melin, C., “Exploration of unknown environments by a mobile robot”, IntelligentAutonomous Systems 2, p. 715-725, 1989.
[13] Anderson, T.L. et Donath, M., “Animal behavior as a paradigm for developing robot autonomy”, dansDesigning Autonomous Agents: Theory and Practive form Biology to Engineering and Back, Maes, P. (éd),The MIT Press, Bradford Book, 1990, p. 145-168.
[14] Antsaklis, P.J., Passino, K.M., et Wang, S.J., “Towards intelligent autonomous control systems:architecture and fundamental issues”, Journal of Intelligent and Robotic Systems, vol. 1, p. 315-342, 1989.
[15] Antsaklis, P.J., Passino, K.M., et Wang, S.J., “An introduction to autonomous control systems”, IEEEControl Systems Magazine, vol. 11, no. 4, p. 5-13, juin 1991.
[16] Antsaklis, P.J., “Toward autonomous intelligent control systems”, dans Proc. Second Annual Conf. on AI,Simulation and Planning in High Autonomy Systems, avril 1991, p. 2-3.
[17] Antsaklis, P., “Defining intelligent control. Report of the task force on intelligent control”, IEEE ControlSystems, p. 4-5 & 58-66, juin 1994.

257
[18] Arkin, R.C., “Integrating behavioral, perceptual, and world knowledge in reactive navigation”, dansDesigning Autonomous Agents: Theory and Practive form Biology to Engineering and Back, Maes, P. (éd),The MIT Press, Bradford Book, 1990, p. 105-122.
[19] Baker, W.L. et Farrell, J.A., “An introduction to connectionist learning control systems”, dans Handbookof Intelligent Control. Neural, Fuzzy and Adaptive Approaches, White, D.A. et Sofge, D.A. (éd), VanNostrad Reinhold, 1992, p. 35-63.
[20] Barto, A.G., “Connectionist learning for control”, dans Neural Networks for Control, Miller, W.T.,Sutton, R.S., et Werbos, P.J. (éd), The MIT Press, 1990, p. 5-58.
[21] Bates, J., Loyall, A.B., et Reilly, W.S., “An architecture for action, emotion, and social behavior”, dansProc. Fourth European Workshop on Modeling Autonomous Agents in a Multi-Agent World, S.Martino alCimino, Italie, 1992, p. 55-68.
[22] Bates, J., “The role of emotion in believable agents”, Communications of the ACM, vol. 37, no. 7, p. 122-125, 1994.
[23] Bay, J.S., “Design of the 'Army-Ant' cooperative lifting robot”, IEEE Robotics and Automation Magazine,vol. 2, no. 1, p. 36-43, mars 1995.
[24] Beaudoin, L.P. et Sloman, A., “A study of motive processing and attention”, dans Prospects for ArtificialIntelligence, IOS Press, 1993, p. 229-238.
[25] Beck, R.C., Motivation. Theories and Principles, Deuxième édition, Prentice Hall, 1983.
[26] Beer, R.D., Intelligence as Adaptive Behavior. An experiment in computational neuroethology, AcademicPress, 1990.
[27] Beer, R.D., Chiel, H.J., et Sterling, L.S., “A biological perspective on autonomous agent design”,Robotics and Autonomous Systems, vol. 6, p. 169-186, 1990.
[28] Beer, R.D. et Chiel, H.J., “The neural basis of behavioral choice in an artificial insect”, dans FromAnimals to Animats. Proc. First Int'l Conf. on Simulation of Adaptive Behavior, The MIT Press, 1991, p.247-254.
[29] Bellingham, J.G. et Consi, T.R., “State configured layered control”, dans NSF/IARP Subsea RoboticsWorkshop, Monterey, USA, octobre 1990, p. 75-80.
[30] Berenji, H.R., Chen, Y.Y., Lee, C.C., Jang, J.S., et Murugesan, S., “A hierarchical approach to designingapproximate reasoning-based controllers for dynamic physical systems”, dans Uncertainty in ArtificialIntelligence 6, Bonissone, P.P., Henrion, M., Kanal, L.N., et Lemmer, J.F. (éd), Elsevier Science, 1991, p.331-343.
[31] Berenji, H.R., “A reinforcement learning-based architecture for fuzzy logic control”, Int. J. Approx.Reason., vol. 6, no. 2, p. 267-292, février 1992.
[32] Berenji, H.R. et Khedkar, P., “Learning and tuning fuzzy logic controllers through reinforcements”, IEEETrans. on Neural Networks, vol. 3, no. 5, p. 724-740, septembre 1992.
[33] Bersini, H., “Génération automatique de systèmes de commande floue par les méthodes de gradient et lesalgorithmes génétiques”, dans Deuxième Journées Nationales sur les Applications des Ensembles Flous,Nîmes, France, 1992, p. 199-209.
[34] Blumberg, B., “Action-selection in Hamsterdam: lessons from ethology”, dans From Animals to Animats3. Proc. Third Int'l Conf. on Simulation of Adaptive Behaviors, The MIT Press, 1994, p. 108-117.
[35] Bonasso, R.P. et Kortenkamp, D., Characterizing an architecture for intelligent, reactive agents, ne trouveplus la référence, pris sur WWW, .

258
[36] Bonasso, R.P., Kortenkamp, D., Miller, D.P., et Slack, M., Experiences with an architecture for intelligentreactive agents, Internal Report, Metrica inc. Robotics and Automation Group, NASA johnson SpaceCenter-ER4, 1995.
[37] Bonissone, P.P., “Fuzzy logic controllers: An industrial reality”, dans Computational Intelligence:Imitating Life, Zurada, J.M., II, R.J.M., et Robinson, C.J. (éd), IEEE Press, 1994, p. 316-327.
[38] Brooks, R.A., “A robust layered control system for a mobile robot”, IEEE Journal of Robotics andAutomation, vol. RA-2, no. 1, p. 14-23, mars 1986.
[39] Brooks, R.A., “Elephants don't play chess”, dans Designing Autonomous Agents: Theory and Practiveform Biology to Engineering and Back, The MIT Press, Bradford Book, 1990, p. 3-15.
[40] Brooks, R.A., “The Behavioral Language user's guide”, A. I. Memo 1227, avril 1990.
[41] Brooks, R.A., “Intelligence without reason”, A. I. Memo 1293, avril 1991.
[42] Brooks, R.A., “Challenges for complete creature architectures”, dans From Animals to Animats. Proc. 1stInt'l Conf. on Simulation of Adaptive Behavior, MIT Press, 1991, p. 434-443.
[43] Brooks, R.A., “Intelligence without representation”, Artificial Intelligence, vol. 47, p. 139-159, 1991.
[44] Brooks, R.A. et Stein, L.A., “Building brains for bodies”, A. I. Memo 1439, août 1993.
[45] Byrd, J.S., “Computers for mobile robots”, dans Recent Trends in Mobile Robots, Zheng, Y.F. (éd), WorldScientific, 1993, chap. 7, p. 185-210.
[46] Chen, F.C., “Back-propagation neural network for nonlinear self-tuning adaptive control”, dans Proc. IEEEInt'l Symposium on Intelligent Control 89, 1989, p. 274-279.
[47] Clancey, W.J., “A boy scout, toto, and a bird”, dans The Artificial Life Route to Artificial Intelligence:Building Embodied, Situated Agents, Steels, L. et Brooks, R. (éd), Lawrence Erlbaum Associates, 1995,chap. 8, p. 227-236.
[48] Colombetti, M. et Dorigo, M., “Learning to control and autonomous robot by distributed geneticalgorithms”, dans From Animals to Animats 2. Proc. Second Int'l Conf. on Simulation of AdaptiveBehaviors, The MIT Press, 1992, p. 305-312.
[49] Connell, , “Navigation by path remembering”, dans SPIE Vol. 1007 Mobile Robots III, 1988, p. 383-390.
[50] Connell, J.H., “A behavior-based arm controller”, IEEE Trans. on Robotics and Automation, vol. 5, no. 6,p. 784-791, décembre 1989.
[51] Connell, J.H., “A colony architecture for an artificial creature”, Technical Report MIT AI Lab AI-TR 1151,août 1989.
[52] Connell, J.H., “SSS: A hybrid architecture applied to robot navigation”, dans Proc. IEEE Int'l Conf. onRobotics and Automation, mai 1992, p. 27192724.
[53] Corfield, S.J., Fraser, R.J.C., et Harris, C.J., “Architecture for real-time control of autonomous vehicules”,Comput. Control. Eng. J., vol. 2, no. 6, p. 254-262, novembre 1991.
[54] Digney, B.L. et Gupta, M.M., “A distributed adaptive control system for a quadruped mobile robot”, dansProc. IEEE Conf. on Neural Networks, San Francisco, 1993, p. 460-465.
[55] Digney, B.L. et Gupta, M.M., “A distributed adaptive control system for a quadruped mobile robot”, dansFrom Animals to Animats 3. Proc. Third Int'l Conf. on Simulation of Adaptive Behaviors, MIT Press,1994, p. 344-353.
[56] Dolan, S.L. et Lamoureux, G., Initiation à la psychologie du travail, Gaëtan Morin éditeur, 1990.

259
[57] Donnart, J.Y. et Meyer, J.A., “A hierarchical classifier system implementing a motivationally autonomousanimat”, dans From Animals to Animats 3. Proc. Third Int'l Conf. on Simulation of Adaptive Behaviors,MIT Press, 1994, p. 144-153.
[58] Dudek, G., Jenkin, M., Milios, E., et Wilkes, D., “Robotic exploration as graph construction”, Tech.Report RBCV-TR-88-23, novembre 1988.
[59] Dudek, G., Freedman, P., et Hadjres, S., “Using local information in a non-local way for mapping graph-like worlds”, dans Proc. Int'l Joint Conf. on Artificial Intelligence (IJCAI), Chambery, France, août 1993.
[60] Engels, C. et Schöner, G., “Dynamic fields endow behavior-based robots with representations”, Roboticsand Autonomous Systems, vol. 14, p. 55-77, 1995.
[61] Engelson, S.P. et McDermott, D.V., “Maps considered as adaptive planning resources”, dans AAAI FallSymposium on Applications of Artificial Intelligence to Real-World Autonomous Mobile Robots, 1992, p.36-44.
[62] Evans, P., Motivation and emotion, Routledge, 1989.
[63] Fehling, M.R., Altman, A.M., et Wilber, B.M., “The Heuristic Control Virtual Machine: animplementation of the Schemer computational model of reflective, real-time problem-solving”, dansBlackboard Architectures and Applications, vol. 3, in ., A.P. (éd.), Academic Press inc., 1989, p. 191-218.
[64] Ferguson, I.A., “Toward an architecture for adaptive, rational, mobile agents”, dans Decentralized A.I.-3.Proc. Third European Workshop on Modelling Autonomous Agents in a Multi-Agent World, Werner, E. etDemazeau, Y. (éd), Elsevier Science, 1992, p. 249-261.
[65] Firby, R.J., “Adaptive execution in complex dynamic worlds”, Thèse Ph.D., Dept. Computer Engineeringand Service, Case Westerne Reserve University, 1989.
[66] Firby, R.J., Kahn, R.E., Prokopowicz, P.N., et Swain, M.J., “An architecture for vision and action”, dansProc. Int'l Conf. Artificial Intelligence (IJCAI), Montréal, août 1995, p. 72-79.
[67] Fox, S. et Leake, D.B., “Using introspective reasoning to refine indexing”, dans Proc. Int'l Joint Conf onArtificial Intelligence (IJCAI), Montréal, août 1995, p. 391-397.
[68] Franklin, J.A. et Selfridge, O.G., “Some new directions for adaptive control theory in robotics”, dansNeural Networks for Control, Miller, W.T., S.Sutton, R., et Werbos, P.J. (éd), The MIT Press, 1990, p.349-360.
[69] Frijda, N.H., “Comment on Oatley and Johnson-Laird's 'Towards a cognitive theory of emotions'”,Cognition and Emotion, vol. 1, no. 1, p. 51-58, 1987.
[70] Fukuda, T. et Shibata, T., “Hierarchical intelligent control for robotic motion by using fuzzy, artificialintelligence, and neural networks”, dans IEEE/INNS Int'l Joint Conf. on Neural Networks, vol. I,Baltimore, 1992, p. 269-274.
[71] Fukuda, T. et Shibata, T., “Fuzzy-neuro-GA based intelligent robotics”, dans Computational Intelligence:Imitating Life, Zurada, J.M., Marks, R.J., et Robinson, C.J. (éd), IEEE Press, 1994, p. 352-363.
[72] Gambardella, L.M. et Haex, M., “A multi-agent analogical representation for physical objects”, dansDecentralized A.I.-3, Werner, E. et Demazeau, Y. (éd.), Elsevier Science Publishers, 1992, p. 331-339.
[73] Garvey, A. et Lesser, V., “A survey of research in deliberative real-time artificial intelligence”, Real-TimeSystems, vol. 6, p. 317-347, 1994.
[74] Gat, E., “Reliable goal-directed reactive control of autonomous mobile robots”, Thèse Ph.D., VirginiaPolytechnic Institute and State University, avril 1991.

260
[75] Gat, E., “Integrating planning and reacting in a heterogeneous asynchronous architecture for controlling real-world mobile robots”, dans Proc. National Conf. on Artificial Intelligence, 1992, p. 809-815.
[76] Georgeff, M.P., “An embedded reasoning and planning system”, dans Proc. from the Rochester PlanningWorkshop, Rochester, New York, 1988.
[77] Gildersleeve, S., “L'authenticité: un aspect en management”, Info Ressources Humaines, vol. 12, no. 8, p.10-13, 1989.
[78] Grumbach, A., “Genèse du symbole artificiel”, Technique et sciences informatiques, vol. 12, no. 3, p. 347-369, 1993.
[79] Halgamuge, S.K., Runkler, T.A., et Glesner, M., “A hierarchical hybrid fuzzy controller for realtime reversedriving support of vehicles with long trailer”, dans Proc. IEEE Int'l Conf. on Fuzzy Systems, 1994, p.1207-1210.
[80] Hallam, J., “Autonomous robots: A question of design”, dans The Artificial Life Route to ArtificialIntelligence: Building Embodied, Situated Agents, Steels, L. et Brooks, R. (éd), Lawrence ErlbaumAssociates, 1995, chap. 7, p. 217-226.
[81] Haton, J.P., La Raisonnement en Intelligence Artificielle: Modèles, Techniques et Architectures pour lesSystèmes à Base de Connaissances, InterEditions, 1991.
[82] Hayes-Roth, B., “An architecture for adaptive intelligent systems”, Artificial Intelligence, vol. 72, p. 329-365, 1995.
[83] Heidegger, G., “Machines, computers, dialectics: a new look at human intelligence”, AI Soc., vol. 6, no. 1,p. 27-40, janvier-mars 1992.
[84] Hessburg, T. et Tomizuka, M., “Fuzzy logic control for lateral vehicle guidance”, IEEE Control Systems,p. 55-63, août 1994.
[85] Hexmoor, H. et Kortenkamp, D., Issues on building software for hardware agents, soumis à Journal ofKnowledge Engineering Review, mai 95.
[86] Hilario, M., “An overview of strategies for neurosymbolic integration”, dans Workshop on Connectionist-Symbolic Integration: From Unified to Hybrid Approaches, Int'l "Joint Conf. Artificial Intelligence (IJCAI),Montréal, août 1995, p. 1-6.
[87] Hilhorst, R.A., van Amerongen, J., Löhnberg, P., et Tulleken, H.J.A.F., “Intelligent adaptive control ofmode-switch processes”, dans IFAC Intelligent Tuning and Adaptive Control, Singapore, 1991, p. 145-150.
[88] Holland, O. et Snaith, M., “Q-learning with generalisation: an architecture for real-world reinforcementlearning in a mobile robot”, dans IEEE/INNS Int'l Joint Conf. on Neural Networks, vol. I, Baltimore,1992, p. 287-292.
[89] Hunt, M., The Universe Within. A New Science Explores the Human Mind, Simon and Schuster, 1976.
[90] fuzzyTECH 3.1 Reference Manual, Inform "Software Corporation, 1840 Oak Avenu, Evanston, IL 60201,1994.
[91] Isik, C. et Meystel, A., “Pilot level of a hierarchical controller for an unmanned mobile robot”, IEEE Trans.on Robotics and Automation, vol. 4, no. 3, p. 241-255, juin 1988.
[92] Jackson, E., Williams, O., et Buchan, K., “Achieving robot autonomy”, dans Third Conference on MilitaryRobotic Applications, sept. 1991, p. 242-248.
[93] Jagannathan, V., Dodhiawala, R., et Baum, L.S., Blackboard Architectures and Applications, vol. 3,Perspectives in Artificial Intelligence, Harcourt Brace Jovanovich, 1989.

261
[94] Jang, J.S.R., “Self-learning fuzzy controllers based on temporal back propagation”, IEEE Trans. on NeuralNetworks, vol. 3, no. 5, p. 714-723, septembre 1992.
[95] Kaelbling, L.P., “An architecture for intelligent reactive systems”, dans Proc.1986 Workshop onReasoning about Actions and Plans, 1986, p. 395-410.
[96] Kaelbling, L.P., “Learning functions in k-DNF from reinforcement”, dans Proc. Seventh Conf.on MachineLearning, 1990, p. 162-169.
[97] Kaelbling, L.P. et Rosenschein, S.J., “Action and planning in embedded agents”, dans DesigningAutonomous Agents: Theory and Practive form Biology to Engineering and Back, Maes, P. (éd), The MITPress, Bradford Book, 1991, p. 35-48.
[98] Kaelbling, L.P. et Littman, M.L., “A bibliography of work related to reinforcement learning”, Tech. ReportCS-94-39, septembre 1994.
[99] Kaelbling, L.P., “The importance of being adaptable”, dans The Artificial Life Route to ArtificialIntelligence: Building Embodied, Situated Agents, Steels, L. et Brooks, R. (éd), Lawrence ErlbaumAssociates, 1995, chap. 10, p. 265-275.
[100] Kandel, E.R. et Schwartz, J.H., Principles of Neural Science, Elsevier/North Holland, 1981.
[101] Kim, S.W. et Park, M., “Fuzzy compliance robot control”, dans Proc. IROS. IEEE/ESJ Int'l Workshopon Intelligent Robots and Systems. Intelligence for Mechanical Systems, vol. 3, novembre 1991, p. 1628-1631.
[102] Kiss, G., “Layered architectures for intelligent agents”, dans IEE Colloqium on 'intelligent agents', février1991, p. 9/1-4.
[103] Kiss, G., “Variable coupling of agents to their environment: combining situated and symbolic automata”,dans Decentralized A.I.-3. Proc. Third European Workshop on Modelling Autonomous Agents in a Multi-Agent World, Werner, E. et Demazeau, Y. (éd), Elsevier Science, 1992, p. 231-248.
[104] Kohout, L., A Perspective on Intelligent Systems. A Framework for Analysis and Design, Chapman andHall, 1990.
[105] Kohout, L.D., Anderson, J., et Bandler, W., Knowledge-Based Systems for Multiple Environments,Ashgate, 1992.
[106] Kortenkamp, D. et Weymouth, T., “Topological mapping for mobile robots using a combination of sonarand vision sensing”, dans Proc. 12th National Conf. on Artificial Intelligence (AAAI), 1994, p. 979-984.
[107] Kube, C.R. et Zhang, H., “Collective robotic intelligence”, dans From Animals to Animats 2. Proc.Second Int'l Conf. on Simulation of Adaptive Behaviors, The MIT Press, 1992, p. 460-468.
[108] Kuipers, B.J. et Byun, Y.T., “A robust, qualitative approach to a spatial learning mobile robot”, dans SPIESensor Fusion: Spatial Representation and Scene Interpretation, vol. 1003, 1988, p. 366-375.
[109] Kuipers, B.J. et Byun, Y.T., “A robust, qualitative method for robot spatial learning”, dans Proc. AAAI,St. Paul, Minneapolis, 1988, p. 774-779.
[110] Langari, R. et Berenji, H.R., “Fuzzy logic in control engineering”, dans Handbook of Intelligent Control.Neural, Fuzzy and Adaptive Approaches, ., D.A.W. et Sofge, D.A. (éd), New York, Van Nostrad Reinhold,1992.
[111] Lavrov, A.A., “Modular reconfigurable controllers with fuzzy meta-control”, dans Proc. IEEE Int'l Conf.on Fuzzy Systems, 1994, p. 1564-1567.
[112] Lee, C.C., “Fuzzy logic in control systems: fuzzy logic controller”, IEEE Trans. on Systems, Man, andCybernetics, vol. 20, no. 2, p. 404-435, mars-avril 1990.
262
[113] LeMoigne, J.L., Intelligence des Mécanismes, Mécanismes de l'Intelligence : Intelligence Artificielle etSciences de la Cognition, Paris, France, Fondation Diderot Fayard, 1986.
[114] Levitt, T.S. et Lawton, D.T., “Qualitative naviguation for mobile robots”, Artificial Intelligence, vol. 44,p. 305-360, 1990.
[115] Li, W., “Fuzzy logic-based 'perception-action' behavior control of a mobile robot in uncertainenvironments”, dans Proc. IEEE Int'l Conf. on Fuzzy Systems, 1994, p. 1626-1631.
[116] Lin, C.T. et Lee, C.S.G., “Reinforcement structure/parameter learning for neural-network-based fuzzy logiccontrol systems”, IEEE Trans. on Fuzzy Systems, vol. 2, no. 1, p. 46-63, février 1994.
[117] Loyall, A.B. et Bates, J., “Real-time control of animated broad agents”, dans Proc. Fifteenth Annual Conf.on the Cognitive Science Society, 1993, p. 664-669.
[118] Maeda, Y., Tanabe, M., Yuta, M., et Takagi, T., “Control purpose oriented behavior-decision fuzzyalgorithm with tuning function of fuzzy branch”, dans Fuzzy Engineering toward Human Friendly Systems., IOS Press, 1991, p. 694-705.
[119] Maes, P., “Designing autonomous agents. Theory and practice from biology to engineering and back”, dansDesigning Autonomous Agents: Theory and Practive form Biology to Engineering and Back, The MITPress, Bradford Book, 1990, p. 1-2.
[120] Maes, P., “Situated agents can have goals”, dans Designing Autonomous Agents: Theory and Practive formBiology to Engineering and Back, Maes, P. (éd), The MIT Press, Bradford Book, 1990, p. 49-70.
[121] Maes, P. et Brooks, R.A., “Learning to coordinate behaviors”, dans Proc. Heigth National Conf. onArtificial Intelligenc eAAAI, vol. 2, American "Association for Artificial intelligence, 1990, p. 796-802.
[122] Maes, P., “A bottom-up mechanism for behavior selection in an artificial creature”, dans From Animals toAnimats. Proc. First Int'l Conf. on Simulation of Adaptive Behavior, The MIT Press, 1991, p. 238-246.
[123] Maes, P., “Behavior-based artificial intelligence”, dans From Animals to Animats 2. Proc. Second Int'lConference on Simulation of Adaptive Behaviors, The MIT Press, 1992, p. 2-10.
[124] Mahadevan, S. et Connell, J., “Scaling reinforcement learning to robotics by exploiting the subsumptionarchitecture”, dans Proc. Heigth Int'l Workshop on Machine Learning, San Mateo, CA, 1991, p. 329-332.
[125] Mahadevan, S. et Connell, J., “Automatic programming of behavior-based robots using reinforcementlearning”, Artificial Intelligence, vol. 55, p. 311-365, 1992.
[126] Malcolm, C. et Smithers, T., “Symbol grounding via a hybrid architecture in an autonomous assemblysystem”, dans Designing Autonomous Agents: Theory and Practive form Biology to Engineering and Back,Maes, P. (éd), The MIT Press, Bradford Book, 1990, p. 123-144.
[127] Maslow, A.H., Motivation and Personality, Harper and Row, 1954.
[128] Mataric, M.J., “A distributed model for mobile robot environment-learning and navigation”, Thèse demaîtrise, MIT, mai 1990.
[129] Mataric, M.J., “Integration of representation into goal-driven behavior-based robots”, IEEE Trans. onRobotics and Automation, vol. 8, no. 3, p. 304-312, 1992.
[130] Mataric, M.J., “Interaction and intelligent behavior”, Thèse Ph.D., Massachusetts Institute of Technology,Boston, mai 1994.
[131] Mataric, M.J., “Learning to behave socially”, dans From Animals to Animats 3. Proc. Third Int'l Conf.on Simulation of Adaptive Behaviors, MIT Press, 1994, p. 453-462.

263
[132] McCarthy, J., “Making robots conscious of their mental states”, dans AAAI Spring Symposium, juillet1995.
[133] McCarthy, J., “What has AI in common with philosophy”, dans Proc. Int'l Joint Conf. on ArtificialIntelligence (IJCAI), Montréal, août 1995, p. 2041-2042.
[134] McFarland, D. et Bösser, T., Intelligent Behavior in Animals and robots, Bradford Book, MIT Press, 1993.
[135] McFarland, D., “Towards robot cooperation”, dans From Animals to Animats 3. Proc. Third Int'l Conf. onSimulation of Adaptive Behaviors, MIT Press, 1994, p. 440-444.
[136] McFarland, D., “Autonomy and self-sufficiency in robots”, dans The Artificial Life Route to ArtificialIntelligence: Building Embodied, Situated Agents, Steels, L. et Brooks, R. (éd), Lawrence ErlbaumAssociates, 1995, chap. 6, p. 187-213.
[137] Michaud, F. et Lachiver, G., “Utilisation de la logique floue pour l'évaluation et l'exploitation du confortthermique”, Rapport interne février 1995.
[138] Mook, D.G., Motivation. The organization of action, W. W. Norton and Company, 1987.
[139] Musliner, D.J., Durfee, E.H., et Shin, K.G., “CIRCA: A cooperative intelligent real-time controlarchitecture”, IEEE Trans. on Systems, Man, and Cybernetics, vol. 23, no. 6, p. 1561-1573, novembre-décembre 1993.
[140] Musliner, D.J., Hendler, J.A., Agrawala, A.K., Durfee, E.H., Strosnider, J.K., et Paul, C.J., “Thechallenges of real-time AI”, Tech. Report CS-TR-3290, UMIACS-TR-94-69, juin 1994.
[141] Musliner, D.J., Hendler, J.A., Agrawala, A.K., Durfee, E.H., Strosnider, J.K., et Paul, C.J., “Thechallenges of real-time AI”, IEEE Computer, vol. 28, no. 1, p. 58-66, 1995.
[142] Narendra, K.S., “Adaptive control of dynamical systems using neural networks”, dans Handbook ofIntelligent Control. Neural, Fuzzy and Adaptive Approaches, New York, Van Nostrad Reinhold, 1992, p.141-183.
[143] Nehmzow, U., “Animal and robot navigation”, Robotics and Autonomous Systems, vol. 15, p. 71-81,1995.
[144] Noreils, F.R. et Chatila, R.G., “Plan execution monitoring and control architecture for mobile robots”,IEEE Trans. Robotics and Automation, vol. 11, no. 2, p. 255-266, avril 1995.
[145] Oatley, K. et Johnson-Laird, P.N., “Towards a cognitive theory of emotions”, Cognition and Emotion, vol.1, no. 1, p. 29-50, 1987.
[146] Ortony, A., Clore, G.L., et Collins, A., The cognitive structure of emotions, Cambridge University Press,1988.
[147] Parikh, R., “The effect of AI on other fields of research”, dans Tenth Annual Int'l Phoenix Conf. onComputers and Communications, mars 1991, p. 848-849.
[148] Parker, L.E., “Adaptive action selection for cooperative agent teams”, dans From Animals to Animats 2.Proc. Second Int'l Conf. on Simulation of Adaptive Behaviors, The MIT Press, 1992, p. 442-450.
[149] Parker, L.E., “Heterogeneous multi-robot cooperation”, Thèse Ph.D., Massachusetts Institute ofTechnology, Boston, février 1994.
[150] Parodi, A. et Bonelli, P., “The animat and the physician”, dans From Animals to Animats. Proc. First Int'lConf. on Simulation of Adaptive Behavior, The MIT Press, 1991, p. 50-57.
[151] Payton, D.W., Rosenblatt, J.K., et Keirsey, D.M., “Plan guided reaction”, IEEE Trans. on Systems, Man,and Cybernetics, vol. 20, no. 6, p. 1370-1382, novembre/décembre 1990.

264
[152] Payton, D.W., “Internalized plans: a representation for action resources”, dans Designing AutonomousAgents: Theory and Practive form Biology to Engineering and Back, Maes, P. (éd), The MIT Press, BradfordBook, 1990, p. 89-103.
[153] Pfeifer, R., “Cognition and emotion: an information processing approach”, CIP Working Paper 436, mai1982.
[154] Pfeifer, R. et Nicholas, D.W., “Toward computational models of emotion”, dans Progress in ArtificialIntelligence, Steels, L. et Campbell, J.A. (éd.), 1985.
[155] Pfeifer, R., “Artificial intelligence models of emotion”, dans Cognitive Perspectives on Emotion andMotivation, Kluwer Academic Publishers, 1988, p. 287-320.
[156] Pfeifer, R. et Verschure, P.F.M.J., “Designing efficiently navigating non-goal-directed robots”, dans FromAnimals to Animats 2. Proc. Second Int'l Conf. on Simulation of Adaptive Behaviors, The MIT Press,1992, p. 31-39.
[157] Pfeifer, R., “Studying emotions: fungus eaters”, Internal Report avril 1993.
[158] Pfeifer, R., “Cognition - Perspectives from autonomous agents”, Robotics and Autonomous Systems, vol.15, p. 47-70, 1995.
[159] Pin, F.G., Watanabe, H., Symon, J., et Pattay, R.S., “Autonomous navigation of a mobile robot usingcustom-designed qualitative reasoning VLSI chips and boards”, dans Proc. IEEE Int'l Conf. Robotics andAutomation, 1992.
[160] Pitrat, J., “Connaissances et métaconnaissances”, dans Intelligence des Mécanismes, Mécanismes del'Intelligence: intelligence artificielle et sciences de la cognition, Moigne, J.L.L. (éd), Paris: Fayard, 1986.
[161] Plutchik, R. et Kellerman, H., EmotionTheory, Research, and Experience, vol. 1, Theories of EmotionSeries, Academic Press, inc., 1980.
[162] Puente, E.A., Gachet, D., Pimentel, J.R., Moreno, L., et Salichs, M.A., “A neural network supervisor forbehavioral primitives of autonomous systems”, dans Proc. Int'l Conf. on Industrial Electronics ControlInstrumentation and Automation Power Electronics, 1992, p. 1105-1110.
[163] Raulefs, P., “Toward a blackboard architecture for real-time interaction with dynamic systems”, dansBlackboard Architectures and Applications, vol. 3, Academic Press inc., 1989, p. 285-299.
[164] Ren, W. et Kumar, P.R., “Stachastic parallel model adaptation: Theory and applications to active noisecanceling feedforward control, IIR filtering and identification”, IEEE Trans. on Automatic Control, vol. 37,no. 5, p. 566-577, mai 1992.
[165] Rimé, B. et Scherer, K.R., Les émotions, Textes de base en psychologie, Paris, Delachaux et Niestlé, 1989.
[166] Rosenblatt, J.K. et Payton, D.W., “A fine-grained alternative to the subsumption architecture for mobilerobot control”, dans Proc. IEEE Int'l Conf. on Neural Networks, vol. I, 1989, p. 317-323.
[167] Rosenschein, S.J. et Kaelbling, L.P., “A situated view of representation and control”, Artificial Intelligence,vol. 73, p. 149-173, 1995.
[168] Rueda, A. et Pedrycz, W., “A hierarchical fuzzy-neural-PD controller for robot manipulators”, dans Proc.IEEE Int'l Conf. on Fuzzy Systems, 1994, p. 673-677.
[169] Russell, S., “Rationality and intelligence”, dans Proc. Int'l Joint Conf. on Artificial Intelligence (IJCAI),Montréal, août 1995, p. 950-957.
[170] Saffiotti, A., Ruspini, E.H., et Konolige, K., “Blending reactivity and goal-directedness in a fuzzycontroller”, dans Proc. IEEE Int'l Conf. on Fuzzy Systems, 1993, p. 134-139.

265
[171] Saffiotti, A., Ruspini, E., et Konolige, K., “A fuzzy controller for Flakey, an autonomous mobile robot”,Technical Note 529, 333 Ravenswood Avenue, Menlo Park, CA 94025-3493, mars 1993.
[172] Saffiotti, A., “Some notes on the integration of planning and reactivity in autonomous mobile robots”,dans Foundations of Automatic Planning, The Classical Approach & Beyond, AAAI Spring Symposium,mars 1993.
[173] Sahota, M.K., “Action selection for robots in dynamic environments through inter-behavior bidding”, dansFrom Animals to Animats 3. Proc. Third Int'l Conf. on Simulation of Adaptive Behaviors, The MITPress, 1994, p. 138-142.
[174] Salichs, M.A., Puente, E.A., Moreno, L., et Pimentel, J.R., “A software development environment forautonomous mobile robots”, dans Recent Trends in Mobile Robots, Zheng, Y.F. (éd), World Scientific,1993, chap. 8, p. 211-253.
[175] Saridis, G.N., “Intelligent robotic control”, IEEE Trans. on Automatic Control, vol. AC-28, no. 5, p. 547-557, mai 1983.
[176] Schank, R.C., Dynamic Memory: A Theory of Reminding and Learning in Computers and People,Cambridge University Press, 1982.
[177] Schnepf, U., “Robot ethology: a proposal for the research into intelligent autonomous systems”, dansFrom Animals to Animats. Proc. First Int'l Conf. on Simulation of Adaptive Behavior, The MIT Press,1991, p. 465-474.
[178] Seel, N., “From here to agent theory”, AISB Q, no. 72, p. 15-25, été 1990.
[179] Selfridge, O.G. et Franklin, J.A., “The perceiving robot: What does it see? What does it do?”, dans Proc.Fifth Int'l Symposium on Intelligent Control, 1990, p. 146-151.
[180] Sheu, P.C.Y. et Xue, Q., Intelligent Robotic Planning Systems, World Scientific, 1993.
[181] da Silva, L.E.B., Lamber-Torres, G., et da Silva, V.F., “Adaptive fuzzy techniques for slip-recovery drivecontrol”, dans Proc. IEEE Int'l Conf. on Fuzzy Systems, 1992, p. 381-388.
[182] de Silva, C.W., Intelligent Control: Fuzzy Logic Applications, CRC Press, 1995.
[183] Simmons, R., Lin, L.J., et Fedor, C., “Autonomous task control for mobile robots”, dans Proc. Fifth Int'lSymposium on Intelligent Control, 1990, p. 663-668.
[184] Simmons, R. et Koenig, S., “Probabilistic robot navigation in partially observable environments”, dansProc. Int'l Joint Conf. on Artificial Intelligence (IJCAI), Montréal, août 1995, p. 1080-1087.
[185] Simon, H.A., “Rational choice and the structure of the environment”, Psychological Review, vol. 63, p.129-138, 1956.
[186] Simon, H.A., “Motivational and emotional controls of cognition”, Psychological Review, vol. 74, p. 29-39, 1967.
[187] Simon, H.A., The Sciences of the Artificial, The MIT Press, 1969.
[188] Simon, H.A., “Explaining the ineffable: AI on the topics of intuition, insight and inspiration”, dans Proc.Int'l Conf. Artificial Intelligence (IJCAI), Montréal, août 1995, p. 939-948.
[189] Sloman, A. et Croucher, M., “Why robots will have emotions”, dans Proc. Seventh Int'l Conf. onArtificial Intelligence, 1981, p. 197-202.
[190] Sloman, A., “A philosophical encounter”, dans Proc. Int'l Joint Conf. on Artificial Intelligence (IJCAI),Montréal, août 1995, p. 2037-2040.
266
[191] Smithers, T., “On why better robots make it harder”, dans From Animals to Animats 3. Proc. Third Int'lConf. on Simulation of Adaptive Behaviors, The MIT Press, 1994, p. 64-72.
[192] Smithers, T., “Are auonomous agents information processing systems”, dans The Artificial Life Route toArtificial Intelligence: Building Embodied, Situated Agents, Steels, L. et Brooks, R. (éd), LawrenceErlbaum Associates, 1995, chap. 4, p. 123-162.
[193] Steel, S., “Notes on current trends in AI planning”, dans Advanced Topics in Aritificial Intelligence,Summer School Proceedings. Lecture Notes in Artificial Intelligence, Springer Verlag, juin 1992, p. 198-207.
[194] Steels, L., “Exploiting analogical representations”, Robotics and Autonomous Systems, vol. 6, no. 2, p.169-186, juin 1990.
[195] Steels, L., “Towards a theory of emergent functionality”, dans From Animals to Animats. Proc. First Int'lConf. on Simulation of Adaptive Behavior, The MIT Press, 1991, p. 451-461.
[196] Steels, L., “A case study in the behavior-oriented design of autonomous agents”, dans From Animals toAnimats 3. Proc. 3rd Int'l Conf. Simulation of Adaptive Behavior, The MIT Press, 1994, p. 445-452.
[197] Steels, L., “Intelligence - Dynamics and Representations”, dans The Biology and Technology of IntelligentAutonomous Agents, Springer Verlag, Berlin, 1995.
[198] Steels, L., “The Homo Cyber Sapiens, the robot Homonidus Intelligens, and the 'artificial life' approach toartificial intelligence”, dans Burda Symposium on Brain-Computer Interfaces, février 1995.
[199] Steels, L., “Buidling agents out of autonomous behavior systems”, dans The Artificial Life Route toArtificial Intelligence: Building Embodied, Situated Agents, Steels, L. et Brooks, R. (éd), LawrenceErlbaum Associates, 1995, chap. 3, p. 83-121.
[200] Sternberg, R.J., Beyond IQ - A Triarchic Theory of Human Intelligence, Cambridge University Press, 1985.
[201] Strongman, K.T., The psychology of emotion, Troisième édition, John Wiley & Sons, 1987.
[202] Tanabe, M., Maeda, Y., Yuda, M., et Takagi, T., “Path planning method for mobile robot using fuzzyinference under vague information of environment”, dans Fuzzy Engineering toward Human FriendlySystems, IOS Press, 1991, p. 758-769.
[203] Tani, J., “Self-organization of symbolic processes through interaction with the physical world”, dans Proc.Int'l Joint Conf. on Artificial Intelligence (IJCAI), Montréal, août 1995, p. 112-118.
[204] Terano, T., “Future vision for fuzzy engineering”, dans Fuzzy Engineering toward Human FriendlySystems, IOS Press, 1991, p. 3-8.
[205] Terano, T., “Fuzzy engineering and LIFE project”, dans Proc. IEEE Int'l Conf. on Fuzzy Systems, 1994,p. 882-885.
[206] Terzopoulos, D., “Modeling living systems for computer vision”, dans Proc. Int'l Conf. ArtificialIntelligence (IJCAI), Montréal, août 1995, p. 1003-1013.
[207] Trappl, R., “AI: Introduction, paradigms, applications (including CBR), impacts, visions”, dans AdvancedTopics in Artificial Intelligence 1992. Lecture Notes in Artificial Intelligence, Springer-Verlag, 1992.
[208] Tyrrell, T., “The use of hierarchies for action selection”, dans From Animals to Animats 2. Proc. SecondInt'l Conf. on Simulation of Adaptive Behaviors, The MIT Press, 1992, p. 138-147.
[209] Verschure, P.F.M.J., Krose, B.J.A., et Pfeifer, R., “Distributed adaptive control: the self-organization ofstructured behavior”, Robot Auton. Syst., vol. 9, no. 3, p. 181-196, 1992.

267
[210] Wang, L.X. et Mendel, J.M., “Generating fuzzy rules by learning from examples”, IEEE Trans. onSystems, Man, and Cybernetics, vol. 22, no. 6, p. 1414-1427, novembre-décembre 1992.
[211] Wang, F.Y. et Lever, P.J.A., “An intelligent robotic vehicle for lunar and martian resource assessment”,dans Recent Trends in Mobile Robots, Zheng, Y.F. (éd), World Scientific, 1993, chap. 10, p. 293-313.
[212] Wavish, P., “Exploiting emergent behavior in multi-agent systems”, dans Decentralized A.I.-3. Proc. ThirdEuropean Workshop on Modelling Autonomous Agents in a Multi-Agent World, Werner, E. et Demazeau,Y. (éd), Elsevier Science, 1992, p. 297-310.
[213] Werner, E., “The design of multi-agent systems”, dans Decentralized AI 3. Proc. Third European Workshopon Modeling Autonomous Agents in a Multi-Agent World, Werner, E. et Demazeau, Y. (éd), ElsevierScience, 1992, p. 3-28.
[214] Wilson, S.W., “The animat path to AI”, dans From Animals to Animats. Proc. First InternationalConference on Simulation of Adaptive Behavior, The MIT Press, 1991, p. 15-21.
[215] Wojcik, V., “Conditions for computer simulation of thought processes to become actual thought”,Simulation, vol. 56, no. 4, p. 272-280, avril 1991.
[216] Yabuta, T. et Manabe, T.T., “Learning control aspects in terms of neuro-control”, dans ComputationalIntelligence: Imitating Life, Zurada, J.M., Marks, R.J., et Robinson, C.J. (éd), IEEE Press, 1994, p. 328-338.
[217] Yamakawa, T., “A fuzzy inference engine in nonlinear analog mode and its application to a fuzzy logiccontrol”, IEEE Trans. on Neural Networks, vol. 4, no. 3, p. 496-522, mai 1993.
[218] Yen, J. et Pfluger, N., “A fuzzy logic based robot navigation system”, dans AAAI Fall Symposium onApplications of Artificial Intelligence to Real-World Autonomous Mobile Robots, 1992, p. 195-199.
[219] Zeleny, M., “Cognitive equilibirum: a knowledge-based theory of fuzziness and fuzzy sets”, Int. J. Gen.Syst., vol. 19, no. 4, p. 359-81, 1991.
[220] Zeleny, M., “Fuzzyfying the precise is more relevant than modeling the fuzzy crisply”, Int. J. Gen. Syst.,vol. 19, no. 4, p. 435-440, 1991.
[221] Zhou, Y.L. et Qiu, Z., “An expert self-learning fuzzy controller”, dans Proc. IFAC Workshop ArtificialIntelligence in Real-Time Control, Chine, septembre 1989, p. 69-73.