MOTEURS SPECIAUX. Moteur Spéciaux Sommaire Moteurs alternatifs Moteurs universels Moteurs...
69
MOTEURS SPECIAUX
-
Upload
raphael-lemoine -
Category
Documents
-
view
163 -
download
21
Transcript of MOTEURS SPECIAUX. Moteur Spéciaux Sommaire Moteurs alternatifs Moteurs universels Moteurs...

MOTEURSSPECIAUX
GJC

Moteur SpéciauxSommaire
Moteurs alternatifs
Moteurs universels
Moteurs asynchrones à induction et rotor à cage
Moteurs à spire de FRAGER
Moteurs triphasés sur un réseau monophasé

Moteur SpéciauxSommaire
Moteurs à courant continu et à aimants permanents
Moteurs à faible inertie
Moteurs couple plats
Servo moteurs
Moteurs sans balais
Moteurs linéaires

Moteurs alternatifs
GJC

Moteurs alternatifsMoteur Universel
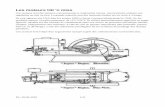
Les moteurs universels sont des moteurs série à collecteur et tôlesfeuilletées exécutés pour une tension unique en courant continu oualternatif à fréquence industrielle.Ils se présentent en général sans habillage, du type « à incorporer »

Moteurs alternatifsMoteur UniverselAntiparasitage
Condensateur
Ensemble flasques paliers Ensemble flasques paliersEnsemble rotorarbre en acier
circuit feuilletébobinage émaillé
collecteurventilateur
Ensemble statorcircuit feuilleté
bobinage émaillé
Ensemble de commutationporte balais
charbonressort de pression

Moteurs alternatifsMoteur Universel
Caractéristiques électriques
Performances :
- grande vitesse de rotation de 3500 à 16000 tr / min.
- puissance réduite 1000 W maximum.
- réservé aux outils à usage intermittent problème de l’usure des balais

Moteurs alternatifsMoteur Universel
Il faut changer le sens du courant dans un seul des deux circuits: - l’induit. - l’inducteur.
Caractéristiques électriques
Inversion du sens de rotation

Moteurs alternatifsMoteur Universel
On réduit à l’aide d’un dispositif électronique la tension d’alimentation l’induit et l’inducteur sont en série donc le couple est très faible aux faibles vitesses.
Caractéristiques électriques
Variation de vitesse

Moteurs alternatifsMoteur Universel
Caractéristiques électriques
Variation de vitesse
Triac ou gradateur (thyristors en tête bêches)

Moteurs alternatifsMoteur Universel
Caractéristiques électriques
Variation de vitesseRedressement commandé
monophasé en général
Sur les visseuses dévisseuses on inversele courant dans un seul des circuits pourobtenir l’inversion du sens de rotation du moteur.

Moteurs asynchrones a induction et rotor a cage
GJC

Moteurs alternatifsMoteur Asynchrone à induction

t
b1
Moteurs alternatifsMoteur Asynchrone à induction
Principe de fonctionnement
b1
b’‘1b’1
0
bobinageprincipal
Un bobinage alimenté par une tension sinusoïdale alternative crée un champs magnétique alternatif sinusoïdal. Il est équivalent théorème de LEBLANC à deux champs de module constants et tournant en sens inverse l’un de l’autre.
b1 = B1 Sin t ^ w
w t = 135°

Moteurs alternatifsMoteur Asynchrone à induction
Principe de fonctionnement
Le rotor ne sait pas sur quel champs tournant s’accrocher, il ne démarrepas spontanément.Si on lui donne une direction privilégiée, il va s’accrocher sur le champsde même sens de rotation et se mettre à tourner.
nN
nS

t
b1
b2
Moteurs alternatifsMoteur Asynchrone à induction
Principe de fonctionnement
b2
b”2
b’2
bobinageauxiliaire
0
Pour permettre un démarrage correct, on utilise un bobinage auxiliairedit de démarrage. Bobiné à 90° électrique du précédent, il est alimentépar un système de déphasage.
b2 = B2 Sin ( t + / 2 ) ^ pw
t = 135°w

Moteurs alternatifsMoteur Asynchrone à induction
Principe de fonctionnement
b”1b’1
0
bobinageprincipal
b”2
b’2
bobinageauxiliaire
b”résultante
b’résultante
La phase auxiliaire permet le démarragenaturel, elle comprend un condensateurqui privilégie le sens de rotation .
nN
nS
Couple sans phaseauxiliaire

Moteurs alternatifsMoteur Asynchrone à induction
Principe de fonctionnement
b”1b’1
0
bobinageprincipal
b”2
b’2
bobinageauxiliaire
b”résultante
b’résultante
La phase auxiliaire permet le démarragenaturel, elle comprend un condensateurqui privilégie le sens de rotation .
nN
nS
Couple avec phaseauxiliaire
Couple avec phaseauxiliaire

Moteurs alternatifsMoteur Asynchrone à induction
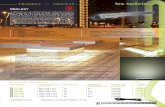
Caractéristiques mécaniques
Ensemble flasques paliers
Ensemble flasques paliers
Ensemble de démarrageCondensateur temporaireCondensateur permanent
Ensemble statorcircuit feuilleté
bobinage en fil émaillé
Ensemble rotorarbre en acier
circuit feuilleté « cage »coupleur à rupture brusque
ventilateur

Moteurs alternatifsMoteur Asynchrone à induction
Caractéristiques électriques
Condensateur temporaire
Condensateur permanent
On obtient le couple de démarrage maximum quand la phase auxiliaireà autant d ’importance que la phase principale.

Moteurs alternatifsMoteur Asynchrone à induction
Schéma typique

Moteurs à spires de FRAGER
GJC

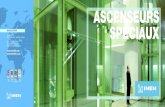
Moteurs alternatifsMoteur à spires de FRAGER
moteurréducteur

Moteurs alternatifsMoteur à spires de FRAGER
Principe de fonctionnement
Au stator , le flux produit par une bobine, par l’action de deux baguesde déphasage « F » (spires de FRAGER) , se comporte comme un fluxglissant vis à vis du rotor fait de substance magnétique.
Spire de FRAGER
Bobine

Moteurs alternatifsMoteur à spires de FRAGER
Principe de fonctionnement
Ce sont des micromoteurs généralement équipés de réducteursmécaniques à rapport fixe. - leur puissance est faible. - ils sont en général bi-tension 127 / 220 V. - leur vitesse de rotation s’étend de 3000 tr/min à 1 tr/ 20 min.
moteurréducteur

Utilisation d’un moteur triphasé
sur un réseau monophasé
GJC

Moteurs alternatifsUtilisation d’un moteur triphasé
sur un réseau monophasé Principe de fonctionnement
On ne peut utiliser ce procédé que sur des moteurs dont P < 1,5 KwDeux phases sont montées en série ou en parallèle selon le couplageréalisé en triphasé.La troisième est mise en série avec un condensateur, elle fait office dephase auxiliaire de démarrage.

Moteurs alternatifsUtilisation d’un moteur triphasé
sur un réseau monophasé Principe de fonctionnement
moteur couplé en étoile en triphasé

Moteurs alternatifsUtilisation d’un moteur triphasé
sur un réseau monophasé Principe de fonctionnement
moteur couplé en étoile en triphasé
Pour changer le sens de rotation, il suffit de changer de phase auxiliaire.

Moteurs alternatifsUtilisation d’un moteur triphasé
sur un réseau monophasé Principe de fonctionnement
moteur couplé en triangle en triphasé

Moteurs alternatifsUtilisation d’un moteur triphasé
sur un réseau monophasé
Pour un moteur donné, la puissance sur l’arbre dans un fonctionnementen monophasé est égale à 75% de la puissance sur l’arbre en triphasé.
C = 70 µF pour P = 1 KW
C = 16 µF pour P = 0,35 KW

Moteurs a courant continuet à aimants permanents
GJC

Moteurs a courant continuMoteurs a faible inertie « moteurs cloche »
Moteur cloche
Réducteur mécanique

Moteurs a courant continuMoteurs a faible inertie « moteurs cloche »
Les servo-moteurs type « cloche » font appel à une technologie originalepas de fer tournant ce qui leur ouvre un vaste champ d’application dansles systèmes d’asservissement et d’entraînement et ce dans de nombreuxsecteurs.

Moteurs a courant continuMoteurs a faible inertie « moteurs cloche »
Principe de fonctionnementLe rotor est l’induit, intégralement en cuivre il est constitué par unbobinage cylindrique creux auto-portant à fils croisés.

Moteurs a courant continuMoteurs a faible inertie « moteurs cloche »
Principe de fonctionnementCe bobinage est tenu sur l’axe par un disque et il tourne dans l’entreferentre le boîtier et un aimant permanent bipolaire situé à l’intérieur durotor.

Moteurs a courant continuMoteurs a faible inertie « moteurs cloche »
Principe de fonctionnement
Cette construction allège le rotor.Très faible inertie donc des démarrages ultra rapides et une très grande puissance par rapport au volume.

Ils sont étudiés pour maintenir un couple important à vitesse nulle d’ouleur nom de « moteurs couple ».Ils se présentent sous forme de galette d’ou le nom de « pan-cake ».Leur forme est intéressante pour les cas ou l’entraînement est monté directement sur l’axe.
Moteurs a courant continuMoteurs couple plats « moteurs pan-cake »

Ils peuvent avoir une disposition inversée.Le stator interne est monté directement sur un arbre fixe.Le rotor externe est monté dans un alésage tournant.
Moteurs a courant continuMoteurs couple plats « moteurs pan-cake »

Le Servo-Moteur AXEM désigne un moteur à courant continu à entreferplan et bobinage lamellaire comportant essentiellement 2 flasques muniesd’aimants permanents qui créent un champ axial dans lequel tourne unrotor plan.
Moteurs a courant continu Servo-Moteurs AXEM
Flasques-aimants
Circuit-rotor
Flasques-aimants
Couronne ou carcasse
Ensemble de commutation

Caractéristiques mécaniques :
- très faible inertie.- constante de temps mécanique très faible.- encombrement réduit en longueur.- diamètre de l’arbre important.- deuxième sortie de bout d’arbre possible.- ventilation forcée possible pour augmenter la puissance.
Moteurs a courant continu Servo-Moteurs AXEM

Moteurs a courant continu Servo-Moteurs AXEM
Caractéristiques électriques :
- les aimants permanents suppriment la source pour l'excitation.- caractéristique couple -vitesse-intensité parfaitement linéaire.- possibilité de travailler à couple nominal à toutes les vitesses.- pas de modulation de vitesse, nombre élevé de lames au collecteur.- gamme de vitesse de 1 à 3000.- commutation parfaite à toutes les vitesses.- couple impulsionnel pouvant atteindre 10 fois le couple nominal.- constante de temps électrique négligeable.- linéarité parfaite de la FEM utilisation en dynamo-tachy.

Moteurs a courant continu Moteurs sans balais
Si les moteurs à courant continu présentent beaucoup d’avantages, ilsnécessitent malgré tout un entretien régulier pour contrôler les balaiset les remplacer régulièrement.Il existe des moteurs sans balais baptisés « BRUSHLESS ».

Moteurs a courant continu Moteurs sans balais
Le rotor est en général creux seule la circonférence est tapissée d’aimants:- refroidissement par circulation d ’air plus facile.- réduction de l’inertie.- réduction du poids
Rotor à aimantspermanents carcasse Bobines stator
capteur

M moment magnétique de l’aimantB champ magnétique tournantq décalage angulaire des deux aimants
C = M . B . Sin q(Nm) (Am2) (T)
Moteurs a courant continu Moteurs sans balais
Les forces développées dans le moteur sont dues à l ’attraction mutuelle :- des pôles réels du rotor ( aimants permanents).- des pôles fictifs du stator ( champs magnétique tournant).
Le rotor tourne à la même vitesse que le champs tournant du stator, lemoteur est dit synchrone.
S N M
S
N
B
O q

Le couple moteur est obtenu quand q = 90°
Moteurs a courant continu Moteurs sans balais
Le moteur tourne à vitesse constante « vitesse de synchronisme » tantque le couple demandé par la charge est inférieur au couple maximum.Le moteur décale son rotor par rapport au champs tournant q augmente.Au delà de 90°, il décroche et s’arrête.
C Maxi = M.B
q
Limite de décrochage du moteur

Moteurs a courant continu Moteurs sans balais
On fait varier le couple maximum développé dans le moteur à travers Bdonc à travers le courant statorique absorbé.On fait varier la vitesse du moteur à travers la vitesse du champs tournantdonc la fréquence des tensions appliquées aux bobinages statoriques.

Avantages des moteurs sans balais :- pas de contact glissant donc grande vitesse 6000 tr / min.- couple nominal par contrôle électronique sur la gamme1à 5000,- avec des aimants performants, construction de rotors creux,
bonne ventilation,couple élevé,faible inertie du rotor,facteur de puissance important.
- avec une carcasse radiateur on peut bien refroidir la circulation du courant est uniquement au niveau du stator,
- possibilité d’un couple à vitesse nulle ( maintien ).
Moteurs a courant continu Moteurs sans balais

Moteurs Linéaires
GJC

Moteurs linéaires Principe
« Stator »Secondaire
« Rotor »Primaire
On coupe le stator d’un moteur « classique » et on le développe à plat

Moteurs linéaires Différents types
- Synchrones,
- Asynchrones,
- Courant Continu,
- Réluctance.

Moteurs linéaires Différents montages
Montage:- Primaire plus petit que Secondaire,
- Primaire plus grand que Secondaire,

Moteurs linéaires Différents constructions
Forme Simple FaceForme Solénoïde Forme Double Face

Moteurs linéaires Apport des moteurs linéaires

Moteurs linéaires Domaines d’application

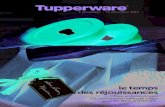
Moteurs linéairesMoteur SIMODRIVE 1FN1 / 1FN3
Moteurs triphasés synchrones à aimants permanents
SecondaireAimants alternativement
pôle Nord et pôle Sudprimaire
Sens du mouvement

Moteurs linéairesMoteur SIMODRIVE 1FN1 / 1FN3
Moteurs triphasés synchrones à aimants permanents
Les signaux de règle ne servent pas uniquement à la mesure de positionde l’axe, mais sont essentiels à la détermination de la vitesse du moteuret aux commutations des phases du moteur.
Règle de mesure
Primaire
Secondaire

Moteurs linéaires Comparaison des performances

Moteurs linéairesMoteur SIMODRIVE 1FN1 / 1FN3

Moteurs linéairesMoteur SIMODRIVE 1FN1 / 1FN3
La source de chaleur à l’intérieur de la machine est l’inconvénient majeur du moteur linéaire.C’est pour cela que l’on s’isole thermiquement du moteur par Thermo Sandwich.
Refroidisseur de puissance85% de la température.
Refroidisseur secondairede précision.
Refroidisseur secondairede précision.
D T maximum 2°C

Moteurs linéairesMoteur SIMODRIVE 1FN1 / 1FN3
- Moteur modulaire- Principe Thermo-Sandwich®- Poussée jusqu’à 20 kN- Accélération jusqu’à 32 g- Vitesse jusqu’à 830 m/min

Moteurs linéairesMoteur SIMODRIVE 1FN1 / 1FN3

Moteurs linéairesMoteur SIMODRIVE 1FN1 / 1FN3
- Principe Thermo-Sandwich®- Très basse dissipation thermique- Compensation des forces d’ondulation- Poussée jusqu’à15 kN- Accélération jusqu’à 20 g- Vitesse jusqu’à 240 m/min

Moteurs linéairesApplications

Moteurs linéairesApplications
TriceptTricept


Moteurs linéairesApplications
SkymillSkymill


Fin