
MIMO Indoor Localization -...
20
Paul STEFANUT, Abdelmottaleb NASR, Davy GAILLOT, Martine LIENARD Localisation indoor basée sur l’exploitation des réseaux MIMO
-
Upload
hoangquynh -
Category
Documents
-
view
217 -
download
0
Transcript of MIMO Indoor Localization -...

Paul STEFANUT, Abdelmottaleb NASR, Davy GAILLOT,Martine LIENARD
Localisation indoor basée sur l’exploitation des réseaux MIMO
2
SommaireContexte de l’étudeEtat de l’art de la localisation indoorLocalisation dans les réseaux sans-fil exploitant des systèmes MIMO• Problématique• Aspects théoriques et ressources nécessaires• Résultats préliminaires• Les difficultésConclusionPerspectives
3
Contexte de l’étudePôle de compétitivité “i-Trans” - Transport Intelligent, Projet
VIATIC• Accompagnement voyageur • E-ticketing• Information en temps réel:
o Horaires transports, gestion correspondances, perturbations, info touristique, divertissement, valorisation temps de parcours
Etude de la couche physique de liaison Etude de caractéristiques de propagation des ondes radio dans
l’environnementOptimisation de la position des bornes d’accès au réseauLocalisation de l’utilisateur• Application localisation LOS et NLOS• Exploitation des réseaux sans-fil existants (Wi-Fi, WiMax)• Utilisation algorithmes haute résolution pour l’estimation des paramètres des signaux dans un cas Large Bande MIMO• Etudes paramétriques afin de trouver les ressources optimales

Etat de l’art de la localisation indoor - 1La technique des “empreintes”• Phase de calibrage: maillage de la zone d’intérêt puissance signal reçu• Phase de localisation: calcul de la différence quadratique minimale
Avantages:Avantages:• Facile à mettre en œuvre• Pas d’équipements spécifique• Exploitation réseaux sans-fil existantsInconvInconvéénients:nients:• Erreur importante estimation

5
La technique de triangulation/multilatération• Mesure paramètres signaux: DOA, TOA, TDOA, Amplitude• Intersection des résultats
Etat de l’art de la localisation indoors - 2
InconvInconvéénients:nients:• Dégradation performances en cas NLOS
Avantages:Avantages:• Implémentation facile• Très bons résultats en cas LOS

TxTx
RxRx11
RxRx22
yy
OO xx
AACC
BB
ττ1 1 θθ11 φφ11
ττ22 θθ22 φφ22
ττii: Retard : Retard θθii: Angle d: Angle d’’ArrivArrivééeeφφii: : Angle de DAngle de Déépartpart
ττ33 θθ33 φφ33
ττ44 θθ44 φφ44
Principe de la technique proposée

Deux points de réception synchronisés Rx1 et Rx2
Les Rx et le Tx équipés de réseaux d’antennesSupposition d’existence d’au moins deux trajets:• 1 LOS + 1 NLOS qui subit 1 seule interaction• 2 NLOS ordre 1Estimation des paramètres des signaux incidents• Retards• Directions de départ• Directions d’arrivée
Paramètres et ressources nécessaires
Relations mathématiques exploitées10 inconnues à déterminer (5 points)• L’émetteur: Tx(xTx, yTx)• Les interactions avec l’environnement: A(xA, yA), B(xB, yB), C(xC, yC),
D(xD, yD)
4 données connues (2 points)• Les récepteurs Rx1(xRx1, yRx1) et Rx2(xRx2, yRx2)
Relations géométriques exploitées• Tangentes angles d’arrivée• Différences de temps de parcours des rayons• Produits scalaires vecteurs centrés en Tx• Produits scalaires vecteurs centrés en Rx1et Rx2
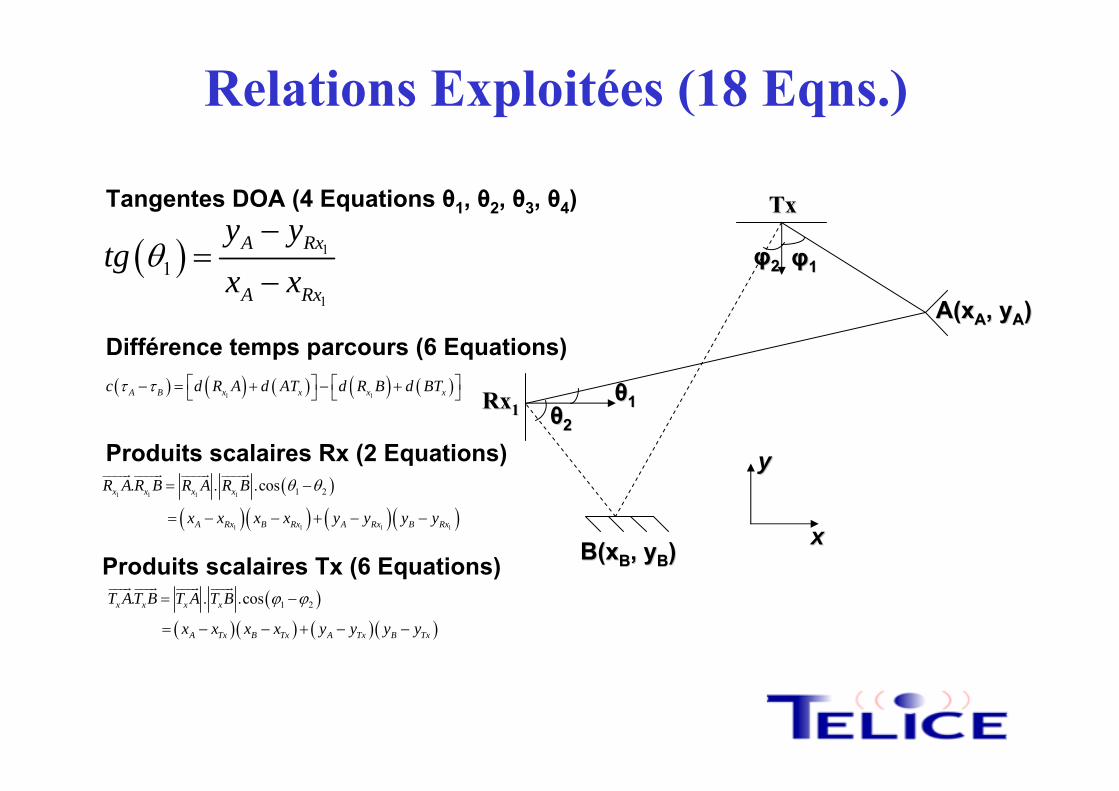
Relations Exploitées (18 Eqns.)
( ) 1
1
1A Rx
A Rx
y ytg
x xθ
−=
−
( )
( )( ) ( )( )1 1 1 1
1 1 1 1
1 2. . .cosx x x x
A Rx B Rx A Rx B Rx
R A R B R A R B
x x x x y y y y
θ θ= −
= − − + − −
uuuur uuuur uuuur uuuur
( )( )( ) ( )( )
1 2. . .cosx x x x
A Tx B Tx A Tx B Tx
T AT B T A T B
x x x x y y y y
ϕ ϕ= −
= − − + − −
uuur uuur uuur uuur
φφ11φφ22
A(xA(xAA, y, yAA))
B(xB(xBB, y, yBB))
TxTx
RxRx11θθ11
θθ22
xx
yy
( ) ( ) ( ) ( ) ( )1 1A B x x x xc d R A d AT d R B d BTτ τ ⎡ ⎤ ⎡ ⎤− = + − +⎣ ⎦ ⎣ ⎦
Tangentes DOA (4 Equations θ1, θ2, θ3, θ4)
Différence temps parcours (6 Equations)
Produits scalaires Rx (2 Equations)
Produits scalaires Tx (6 Equations)

Résultats théoriques préliminaires en connaissant à priori les paramètres des signaux incidents (θ, φ, τ)
Erreur = 8.9*10Erreur = 8.9*10--1212

Les difficultés – 1 existence trajets d’ordre 0 (LOS) et 1 (NLOS une interaction)Environnement Bureau
Simulation dans un environnement composé de bureauxpar Ray-Tracing (WinProp) F=3 GHz, maillage dx = dy = 0.5m

Les difficultés – existence trajets d’ordre 1Environnement Bureau
Probabilité de couverture de la zone d’intérêt
25% de la zone reçoit 2 interactionsd’ordre 0 et 1

Les difficultés – 1 existence trajets d’ordre 0 (LOS) et 1 (NLOS une interaction)Environnement Ouvert
Simulation dans un environnement “grande surface”: la zone centrale d’échanges de la station de Metro “Gare Lille Flandres”
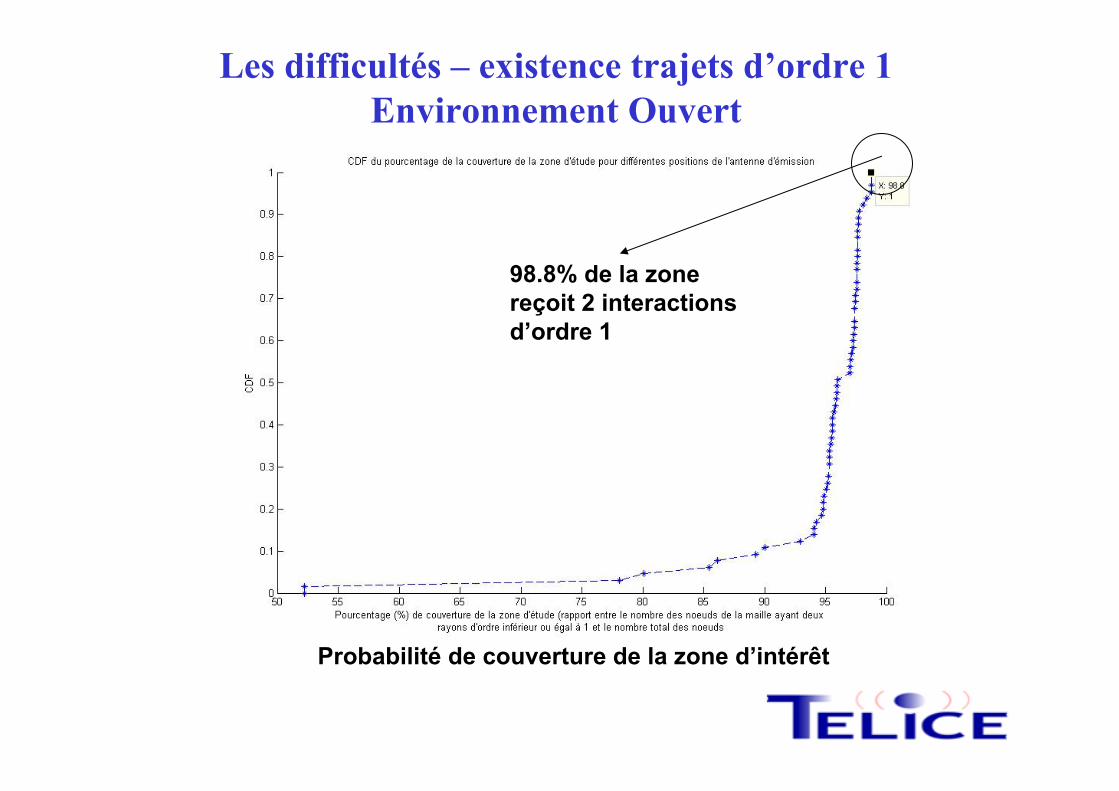
Les difficultés – existence trajets d’ordre 1Environnement Ouvert
98.8% de la zone reçoit 2 interactionsd’ordre 1
Probabilité de couverture de la zone d’intérêt
Les difficultés – erreurs d’estimation des paramètres - 1
Etude paramétrique algorithmes HR SAGE et ESPRIT• Réseaux ULA • Modèle de canal:
• D = 4 sources (trajet direct + interactions premier ordre) définies par ψi et Ai Є (2, D] • Amplitude premier signal normalisée A1=1, Ai distribution amplitudes Rayleigh• ψi Є U(0, 2π), • τi distribution uniforme entre 50 et 100 ns
• Définition facteur R = P1/ΣPi, i = 2, …, D• BP = 20 MHz, ∆f = 1 MHz, lissage en fréquence avec un facteur 2/3• 1000 réalisations pour l’analyse de chaque paramètre (SNR, R, taille réseau, etc.)
Statistiques de l’erreur de l’estimation des paramètres• Nombre d’antennes du réseau• SNR• Facteur R• Sous/sur estimation du nombre des signaux• Analyse perturbations: effet masquage, bruit de phase, onde non-plane

16
Estimation 1D DOAEstimation 1D DOA
Estimation 2D DOA Estimation 2D DOA
Estimation 3D DOA Estimation 3D DOA
Les difficultés – erreurs d’estimation de la DOA - 2
17
Les difficultés – erreurs d’estimation des paramètres - 3
Erreur d’estimation angulaire inférieure à 2°• Au moins 9 antennes dans le cas 2D et 5 antennes en 3D• SNR ≥ 10 dB• Un rapport de puissance R < 5 dB
La surestimation du nombre des signaux diminue l’erreur d’estimation de la DOA du deuxième signal• La sous-estimation dégrade les performances
L’estimation est dégradée par les perturbationsComportement similaire pour tous les paramètres Meilleures performances obtenues avec l’algorithme
SAGE

Proposition d’une méthode de localisation basée sur un modèle géométrique du canal et sur l’estimation des paramètres des signaux reçusValidation de la méthode avec des réseaux ULA et des signaux générés par Ray-Tracing en 2DRésultats préliminaires sur les performances des algorithmes d’estimation:• Etude paramétrique: analyse des erreurs d’estimation
Conclusion

Etude de l’influence des erreurs d’estimation sur l’erreur de la positionValidation avec des mesuresExtension de la méthode avec des réseaux planaires (URA, UCA) – estimation élévation + visibilité sur 360°Amélioration de l’estimation des paramètres avec l’algorithme RIMAXExtension au cas 3D de l’algorithme de localisation• Incrémentation nombre équations du système => solution
+ rapide• Amélioration de la précision de la solution
Perspectives

20
Merci pour votre attention !


















