
Le projet - IFSTTAR Actions incitatives:...
30
Le projet
-
Upload
nguyenthien -
Category
Documents
-
view
214 -
download
0
Transcript of Le projet - IFSTTAR Actions incitatives:...

Le projet

Objectifs
• Un complément au projet TEOR (Rouen) – Bus à Haut Niveau de Service (BHNS)– Guidage optique
Amélioration de fonctions existantes
Développement de nouvelles fonctionnalités
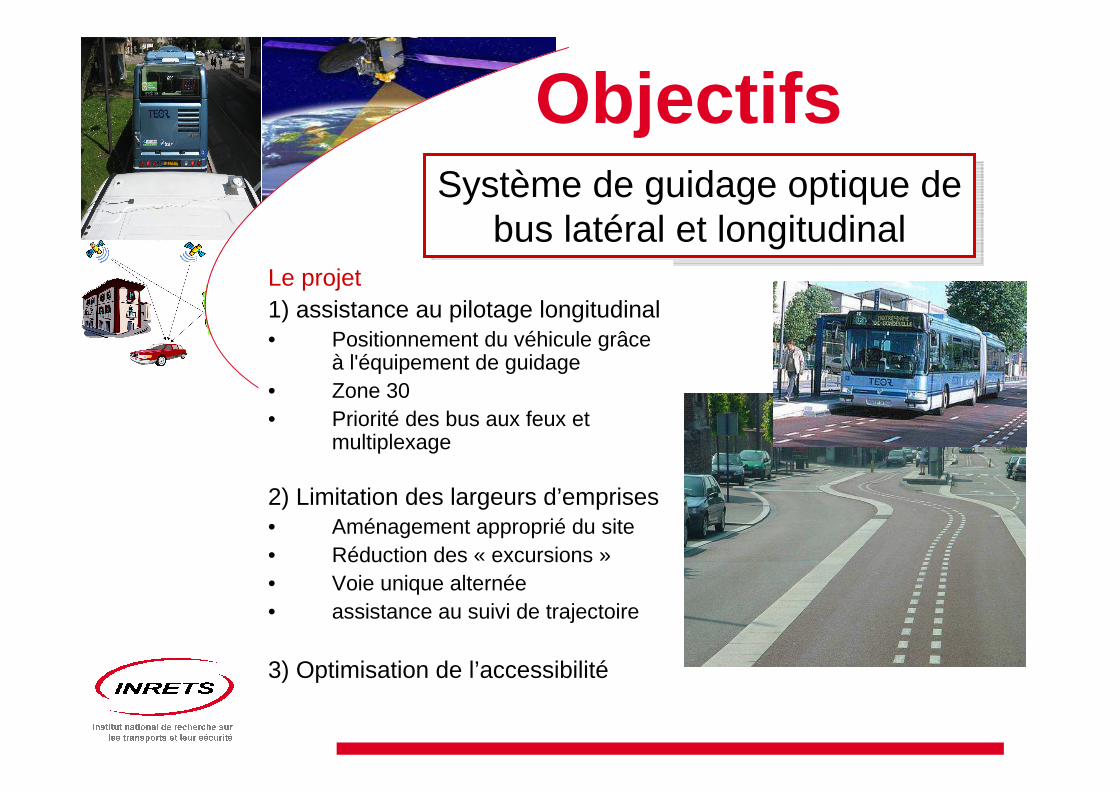
ObjectifsSystème de guidage optique de
bus latéral et longitudinalSystème de guidage optique de
bus latéral et longitudinalLe projet1) assistance au pilotage longitudinal• Positionnement du véhicule grâce
à l'équipement de guidage• Zone 30• Priorité des bus aux feux et
multiplexage
2) Limitation des largeurs d’emprises• Aménagement approprié du site• Réduction des « excursions »• Voie unique alternée• assistance au suivi de trajectoire
3) Optimisation de l’accessibilité

Les partenaires– Veolia Transport (coordinateur du projet)
• 1er opérateur privé de transport terrestre de voyageurs en Europe
– INRETS• Institut National de Recherche sur les Transports et leur
Sécurité
– Siemens Transportation System• A la fois pôle international d’expertise du groupe pour
les automatismes de transport urbain et leader mondial des métros entièrement automatiques
– Iveco France• Deuxième constructeurs européen d’autobus et
d’autocars

Les taches• Accessibilité• Confort passager• Localisation• Modélisation dynamique• Restitution au conducteur• Maintenance/télédiagnostic
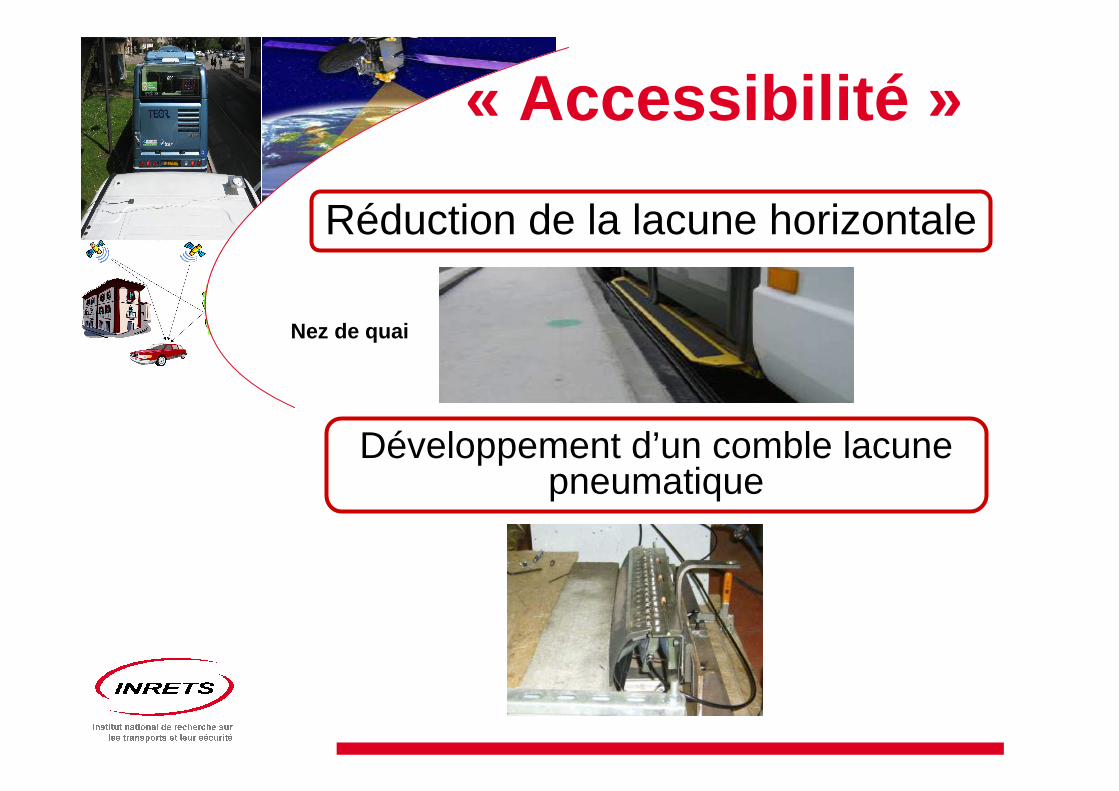
« Accessibilité »
Nez de quai
Réduction de la lacune horizontale
Développement d’un comble lacune pneumatique

« Confort Passager »
Emplacement des sujets Bouton poussoir Caméscope
Evaluation de l’impact sur le futur system
Stabilité du voyageur debout

« Localisation »
Profil tridimensionnel de la ligne T1
Localiser le bus sur la ligne avec une précision fine
< 5m
> 5m
Cartographie des performances GPS attendues

« Modélisation dynamique »
Centrale d’acquisition Débitmètre MECEL CAN + MuxyClips
Véhicule non multiplexés ( < Euro III ) Véhicule multiplexés ( > Euro IV )
déterminer un profil de conduite optimum
Assistance pour une conduite souple et économique
Aide à la conduite rationnelle

« Restitution Conducteur »
IHM d’analyse post-conduiteIHM Temps réel
Développement d’une interface homme/machine pour indiquer au chauffeur si il suit ou non le profil de conduite optimal

« Maintenance / Télédiagnostic »
Calculateur VIDAC
Déterminer les anomalies
anticiper les éventuelles pannes
Télédiagnostic

T0T0+12
T0+24
T0+36
Specifications
Equipment Development
Localisation
Road tests
Planning• Démarrage : 10 Fevrier 2006• Durée : 36 mois
Phase 1Phase 2
Phase 3Programme : 36 mois
Début 2006 Début 2009
Mars 2007Intégration d’un prototypesur un véhicule (Béziers)
Été 2007Déploiement du produit sur unéchantillon de véhicule (Béziers)
Confortmètre
Été 2007Intégration des équipement etpremiers tests en embarqué
Véhicule ANGO

Groupe de travail localisation
Objectifs et travaux du LEOST

La localisation : objectifs
• Fournir une position longitudinale précise tout le long du trajet du véhicule
• Impacts:– Confort– Consommation de carburant– Egalement utilisation classique de
gestion de flotte…

Objectif consommation
• Transmettre au conducteur une consigne de vitesse optimale, via un IHM
IHM Temps réel
• Réduire les freinages• Réduire la consommation superflue

Les besoins
• 2 types de zones :– Zones guidées– Inter-stations
• Besoin en positionnement :– 25 cm en zones guidées (approches de quai)– 5 m ailleurs.

Les systèmes retenus (1/2)
• GPS / Galileo+ Positionnement
continu- Indisponibilité
dans certaines zones urbaines, imprécision

Les systèmes retenus (1/2)
• RFID+ Une position précise- Une solution discrète, Besoin de
modifier l’infrastructure

ANGO - Localisation
Qua
i 2
Quai 1
Recalage courbure
Arbre Arbre Arbre
Recalage premier pointillé
Recalage premier pointillé
: Zone guidée : localisation par marquage
: Zone hors guidage : localisation par capteurs + Map Matching +
balise RFID si besoin
• Etude des performances GPS sur piste (précision)
• Etude de la disponibilitésatellitaire le long de la ligne
• Construction d’une BDD de caractérisation des performances

Les taches LEOST• 1. Evaluation des performances de plusieurs GPS en site
« ouvert » et en milieu urbain (2006)
� Pierre-Louis Girard, Juliette Marais, Mesures GPS sur le circuit du LIER à Lyon, Rapport interne au projet ANGO, Oct. 2006.� Pierre-Louis Girard, Juliette Marais, Disponibilité GPS sur la ligne T1 de Rouen, Rapport interne au projet ANGO, Oct. 2006.� Pierre-Louis Girard, Juliette Marais, Disponibilité GPS sur la ligne T1 de Rouen, Résultats issus de PREDISSAT, Rapport interne au projet ANGO, Juil. 2007.
• 2. construction d’une base de données affichant la « fiabilité » de la mesure GPS le long du parcours (2007)
� Laurent Facon, Nicolas Viandier, Juliette Marais, Développement d’une base de données de la disponibilité GPS le long de la ligne T1, Rapport interne au projet ANGO, Oct. 2007.

Les performances GPS
1. En environnement “libre”
0
1
2
3
4
5
1 7 13 19 25 31 37 43 49 55
Time (secondes)
Err
or (
met
res)
Septentrio
trimble
Tfac
Virage
0
5
10
15
20
25
30
35
0,5 1 1,5 2 2,5 3 4
Errors (meters)
Num
ber o
f mea
sure
men
ts Septentrio
Trimble
TFAC

2. En environnement urbain
Deux méthodes :
Les performances GPS
Expérimentation Simulation
PREDISSAT ERGOSPACE

Résultats expérimentaux
Précision
Nombre de satellites reçus

Résultats de simulation : PREDISSAT

Résultats de simulation : Ergospace
Constellation Nb moyen de satellites “directs”
Nb moyen de satellites
GPS 4.75 5.92
GALILEO 5.52 6.92
GPS + GALILEO 10.27 12.84
Constellation Indisponibilité(Satellites directs seulement)
Indisponibilité(Tous satellites)
GPS 23.88 % 3.54 %
GALILEO 12.87 % 2.43 %
GPS + GALILEO 0.37 % 0 %

Cartographie des performances GPS le long de la ligne T1
Objectif :Construire une base de données cartographique caractérisant les performances GPS le long de la ligne
- Dans quelles zones n’a t’on pas de service utilisable ?- Dans quelles zones peut on atteindre une précision inférieure à 5m (3m?) ?

• Travaux réalisés (à partir de simulation et de mesures) :– Etude des différents paramètres affectant la
localisation et de leur impact (Rapport signal sur bruit, élévation des satellites, géométrie des satellites…)
– Etude de la précision et de la disponibilité en fonction de l’évolution de ces paramètres
– Génération d’une base de données
Cartographie des performances GPS le long de la ligne T1

• Exemple de résultatsScénario optimal : exclusion des satellites au rapport signal sur bruit inférieur à 38 dB
» 92.1% de points <5 m
< 5m
> 5m
Cartographie des performances GPS le long de la ligne T1

• Nouvelle étude réalisée avec une précision souhaitée de 3 mètres
581168.13 mètres
34492.15 mètres
Nombre de zones dont la longueur est >300m
Nombre de zones dont la longueur est >100m
Nombre de zones dont la longueur est >50m
% de points avec cette précision
Précision souhaitée
• Format de la base de données
Cartographie des performances GPS le long de la ligne T1

Système de localisation finalà tester
• Système de localisation hybride (tache STS)
Système de localisation
GPSBase de données
Carte de la trajectoireRFID
Disponibilité maximale ~ 100%Précision < 5m le long de la ligne






![Empatije [omazh 'malome-Geri'] by Dr [2003 ili… 2004]](https://static.fdocuments.fr/doc/165x107/5695cf4a1a28ab9b028d7340/empatije-omazh-malome-geri-by-dr-2003-ili-2004.jpg)










