Le problème de Cauchy. Résultats fondamentaux. · 2013-12-25 · permet de construire une suite...
23
chapitre 1 1 Le problème de Cauchy. Résultats fondamentaux. 1. Notion de solution maximale. Problème de Cauchy. 1.1 Forme normale d’une équation différentielle y’ = f(x ,y). On étudie ici les équations différentielles (ou systèmes d’équations) de la forme: y’ = f(x,y) (E) (forme normale) où f est une fonction continue sur un ouvert U ⊂ r x r n , à valeurs dans r n et y une fonction de classe C 1 sur un intervalle de r à valeurs dans r n . • Exercice: Vérifier que si f est de classe C p , toute solution de y’ = f(x,y) est de classe C p+1 . Exprimer les dérivées y (k) , pour k ≤ p+1 en fonction des dérivées partielles de f et de y. Forme normale des équations et des systèmes d’ordre supérieur: Une équation d’ordre n : y (n) = F(t, y(t), y’(t), .... y (n-1) ) où y est une fonction de classe C n à valeurs dans r p se ramène à un système d’ordre 1. Pour cela on associe Y = [ ] yy y n , ', , ( ) − 1 à la fonction y, ce qui définit une fonction à valeurs dans r np qui est solution d’un système Y’ = G(t, Y) ssi y vérifie le système d’ordre n précédent. Exemple: Considérons l’équation x x x x " ( ²) ' + =µ − 1 (V) (équation de Van der Pol). Associons à toute fonction x(t) deux fois dérivable, la fonction vectorielle X(t) = (x(t), x’(t)). Il est immédiat que x(t) est une solution de (V) ssi X(t) vérifie le système du premier ordre: X t X t X t X t x X t '() ' () () () ( ² ). () 1 2 2 1 2 1 = =− −µ − 1.2 Solutions maximales et solutions globales. définitions: on dit qu’une solution de (E), définie sur un intervalle I est une solution maximale de (E) si elle n’admet pas de prolongement à un intervalle contenant strictement I . Dans le cas où l’ouvert de définition de f est de la forme J x U’ où J est un intervalle ouvert de r et U’ est un ouvert de r n , on dit qu’une solution est une solution globale si elle est définie sur l’intervalle J.
Transcript of Le problème de Cauchy. Résultats fondamentaux. · 2013-12-25 · permet de construire une suite...

chapitre 1
1
Le problème de Cauchy. Résultats fondamentaux.
1. Notion de solution maximale. Problème de Cauchy.
1.1 Forme normale d’une équation différentielle y’ = f(x ,y).
On étudie ici les équations différentielles (ou systèmes d’équations) de laforme: y’ = f(x,y) (E) (forme normale) où f est une fonction continue sur unouvert U ⊂ r x rn , à valeurs dans rn et y une fonction de classe C1 sur unintervalle de r à valeurs dans rn .
• Exercice: Vérifier que si f est de classe Cp, toute solution de y’ = f(x,y) est declasse Cp+1. Exprimer les dérivées y(k), pour k≤p+1 en fonction des dérivéespartielles de f et de y.
Forme normale des équations et des systèmes d’ordre supérieur:Une équation d’ordre n : y(n) = F(t, y(t), y’(t), .... y(n-1)) où y est une fonction declasse Cn à valeurs dans rp se ramène à un système d’ordre 1. Pour cela on associe Y = [ ]y y y n, ' , , ( )−1 à la fonction y, ce qui définit une
fonction à valeurs dans rnp qui est solution d’un système Y’ = G(t, Y) ssi yvérifie le système d’ordre n précédent. Exemple: Considérons l’équation x x x x" ( ² ) '+ = µ −1 (V) (équation de Van der
Pol). Associons à toute fonction x(t) deux fois dérivable, la fonctionvectorielle X(t) = (x(t), x’(t)).
Il est immédiat que x(t) est une solution de (V) ssi X(t) vérifie le système dupremier ordre:
X tX t
X tX t x X t
' ( )' ( )
( )( ) ( ² ). ( )
1
2
2
1 21== − − µ −
1.2 Solutions maximales et solutions globales.
définitions: on dit qu’une solution de (E), définie sur un intervalle I est unesolution maximale de (E) si elle n’admet pas de prolongement à un intervallecontenant strictement I . Dans le cas où l’ouvert de définition de f est de la forme J x U’ où J est unintervalle ouvert de r et U’ est un ouvert de rn , on dit qu’une solution est unesolution globale si elle est définie sur l’intervalle J.

chapitre 1
2
illustrations: y’ = 1 + y² n’a pas de solution globale... alors que toute solutionmaximale d'une équation linéaire y’ = a(x)y + b(x) est une solution globale (ie:définie sur Da ∩ Db).
Théorème:Toute solution de (E) se prolonge en une solution maximale au moins.
dém: [Dem] ou [Schwartz]. C’est une conséquence facile du lemme de Zorn.
Sous les hypothèses du théorème de Cauchy-Lipschitz nous montrerons cerésultat plus directement.
1.3 Equation fonctionnelle associée à un problème de Cauchy.
La remarque qui suit est essentielle.
Soit U un ouvert de r x rm et f: U → rm, une fonction continue.Une fonction y(t) de classe C1, définie sur un intervalle contenant t0 est solution
du problème de Cauchy (E0) y f t yy t y
' ( , )( )=
= 0 0
, ssi y t y f u y u dut
t
( ) ( , ( ))= + ∫0
0
.
2. Notion de cylindre de sécurité.
Soient C = [t0 - T, t0 + T] x B_
(y0, R) un voisinage compact de (t0, y0) contenudans U, M un majorant de f sur C et y(t) une fonction continue, définie sur
l’intervalle I = [t0 - T, t0 + T] et à valeurs dans la boule fermée B_
(y0, R).
Posons T(f)(t) = y f u y u dut
t
0
0
+ ∫ ( , ( )) .
Comme T f t y M t t( )( ) − ≤ −0 0 il suffit que l’on ait MT ≤ R pour que T(f)soit définie sur l’intervalle I et que son graphe soit contenu dans C.Cette remarque nous conduit introduire la notion très utile de cylindre (outonneau ou...) de sécurité
On dit que C est un cylindre de sécurité pour le problème de Cauchy (E0) si la
condition T≤RM
est remplie , M étant un majorant de f sur C.

chapitre 1
3
• Pour toute fonction f continue définie sur un voisinage de (t0, y0), il existe descylindres de sécurité pour le problème (E0).
Il suffit en effet de prendre un cylindre [t0-T0, t0+T0] x B_
(y0, R) contenudans U, sur lequel f est bornée par M et de choisir T = inf(T0, R/M). Lecylindre C ainsi obtenu est un cylindre de sécurité pour (E0).
• Si C est un cylindre de sécurité pour (E0), l'opérateur T transforme toutefonction continue sur I = [t0-T, t0+T], dont le graphe est contenu dans C, enune fonction continue sur I dont le graphe est aussi contenu dans C.
• En particulier toute solution de (E0) définie sur I (qui est donc invariante parT) a son graphe contenu dans C.
• Lorsque ϕ0(t) est définie sur I, la relation ϕn+1(t) = y f u u dunt
t
0
0
+ ∫ ( , ( ))ϕ
permet de construire une suite de fonctions qui sont toutes définies sur I, cequi apparaîtra essentiel dans la démonstration du théorème de Cauchy-Lipschitz.

chapitre 1
4
3. Le théorème de Cauchy-Lipschitz.
On dit que f est k-lipschitzienne en y ssi f t y f t z k y z( , ) ( , )− ≤ − pour (t,y),(t,z) dans U. On dit que f est localement lipschitzienne en y, si tout point de Uadmet un voisinage sur lequel f est lipschitzienne en y.
Cette propriété de la fonction f, supposée par ailleurs continue, assurel’existence et l’unicité d’une solution maximale du problème de Cauchy. Nousverrons (chapitre 2) que sous la seule hypothèse de continuité de f, l’existenced’une solution maximale est assurée, sans qu’il n'y ait nécessairement unicité.
Remarquons qu’il existe des classes d’équations différentielles y’ = F(t, y), pourlesquelles chaque problème de Cauchy admet une solution et une seule sans queF ne soit nécessairement localement lip en y. C’est le cas par exemple deséquations à variables séparables (de la forme y’ = f(t)g(y) = F(t, y), f et gcontinues).
3.1 Etude locale.
Gardons les notations du paragraphe précédent.
Théorème 3.1: (de Cauchy - Lipschitz, existence et unicité locales)Si f est lipschitzienne en y, si C est un cylindre de sécurité pour le problème(E0), il existe une solution de (E0) définie sur I = [t0 - T, t0 + T] ,et une seule.
démonstration: prouvons d’un même jet le théorème 3.1 et le théorèmed’existence et de continuité en fonction des paramètres...
problème avec paramètre: Soit f : (t,y, λ) ∈ U x Λ ⊂ r x rn x Λ → f(t, y,λ) ∈ rn continue, K-lipchitzienne en y (K indépendant de t et λ)), Λ étantlocalement compact.
Notons (Eλ) le problème de Cauchy y t f t y t
y t y' ( ) ( , ( ), )
( )=
=
λ
0 0, λ∈ Λ.
Théorème 3.2: continuité de la solution dépendant d’un paramètre.
• Il existe un compact [to-T,to+T] x B_
(yo, r) x Λ0 , tel que pour tout λ ∈Λ0 , le
cylindre C = [to-T,to+T] x B_
(yo, r) soit un cylindre de sécurité pour (Eλ).
• la fonction (t, λ)→ yλ(t) , où yλ est la solution du problème (Eλ) sur I, est unefonction continue sur C.

chapitre 1
5
• démonstration:
1.La méthode du point fixe de Picard: [Schwartz] ,[Dem] [Z & Q] etc...
• (t0, y0, λ0) admet un voisinage compact [to-T’,to+T’] x B_
(yo, r) x Λ0 sur lequelf est bornée. En choisissant T= inf(T’, r/M), C est un cylindre de sécurité pourtous les problèmes (Eλ).
• Posons: Φλ(y) (t) = y f u y u dut
t
0
0
+ ∫ ( , ( ), )λ , ce qui définit un opérateur
fonctionnel de l’espace E des fonctions continues de I dans rm dans lui-même.
• Φλ admet une itérée contractante pour la norme uniforme.
Φλ(y) (t) - Φλ(z) (t) = f u y u f u z u dut
t
( , ( ), ) ( , ( ), )λ λ−∫0
φ φλ λ( ) ( )( )( ) ( )( )2 2y t z t− ≤ K y u z u du
t
t
φ φλ λ( )( ) ( )( )−∫0
≤ −∫∫K y s z s dsdut
u
t
t
² ( ) ( )
00
≤ −K y t z t² ( ) ( )2
.
Une récurrence facile montre que: φ φλ λ( ) ( )( )( ) ( )( )n ny t z t− ≤
Kn
y t z tn
!( ) ( )−
• On en déduit, puisque E est un espace de Banach pour la norme uniforme, quepour tout λ∈Λ , Φλ admet un point fixe unique yλ et que l’application λ→ yλ, est continue sur Λ0.
• Pour en déduire la continuité de (t, λ)→ yλ(t) sur I x Λ0, écrivons:y t y u y t y u y u y uλ µ λ λ λ µ( ) ( ) ( ) ( ) ( ) ( )− ≤ − + − et le résultat devient
évident puisque le second terme est majoré indépendamment de u pary yλ µ−
∞.
2. Nous donnerons une autre démonstration du théorème de Cauchy Lipschitzfaisant intervenir les fonctions d’Euler dans le chapitre 2.

chapitre 1
6
Remarque: les conditions initiales pour les équations d'ordre supérieur.
On sait qu'une équation d'ordre n de la forme Y(n) = F(t, Y(t), ..., Y(n-1)(t)) où Yest une fonction vectorielle à valeurs dans E, est équivalente à un système dupremier ordre de la forme Z' = G(t, Z(t)) où Z est la fonction définie par Z(t) =[Y't), Y'(t),..., Y(n-1)(t)] . La condition initiale Z(t0) ) = Z0 s'exprime donc Y(t0) = Y0, ..., Y(n-1)(0) = Yn-1
3.2.Continuité en fonction des conditions initiales.
Théorème 3.3: dépendance de la solution en fonction de (t0, y0 ). On suppose, comme dans le théorème 2, que la fonction f(t, y, λ) est continue,localement lipschitzienne en y sur U. Alors:• Pour tout triplet (t0, y0, λ0 ) dans U x Λ, il existe T > 0 , R >0, tels que :
si V = [to-T,to+T] x B_
(yo, R), pour tout (t1, y1, λ1) ∈ V x Λ0, la solution duproblème y’ = f(t, y, λ1) et y(t1) = y1 est définie sur [t0-T, t0+T].
• La fonction (t, t1, y1, λ1 )→ y(t, t1, y1, λ1 ), où t → y(t, t1, y1, λ1 ) est solutiondu problème précédent est continue.
références: ces résultats sont démontrés dans [Dem], [Z & Q], ...(ainsi que lesthéorèmes analogues de différentiabilité).
démonstration:
étape 1:existence d’un intervalle sur lequel sont définies des solutions des problèmesy’=f(t,y, λ1),y(t1)=y1.
Soit C = [to-T0,to+T0] x B_
(yo, R0) un cylindre de sécurité pour les problèmes deCauchy y’ = f(t, y, λ) et y(t0) = y0 lorsque λ décrit un voisinage de λ0 (voirdémonstration du théorème 2). On a MT R0 0≤ où M est un majorant de f(t,y,λ) sur C x Λ0...
Posons V = [to-T,to+T] x B_
(yo, R) où T = T0/3 et R = R0/3. Prenons (t1, y1, λ1 )∈ V x Λ0.

chapitre 1
7
On obtient un cylindre de sécurité pour le problème de Cauchy (E1): y’ = f(t,
y, λ1) et y(t1) = y1 en posant C1 = V = [to- 2T0/3,to+ 2T0/3] x B_
(yo, 2R0/3)(contenu dans C sur lequel f est majorée par M).
La solution y1 de ce problème est donc définie sur [to- 2T0/3,to+ 2T0/3] quicontient [to-T,to+T].
étape 2: se ramener à une équation dont (t1, y1) sont des paramètres.
Notons x(t, (t1, y1, λ1)) la solution de (E1) sur l’intervalle [to-T,to+T].Posons ϕ(s) = x(to + s , (t1, y1, λ1)) - x(to , (t1, y1, λ1)) . Elle vérifie:(i) ϕ(s) est définie sur [to-T,to+T];(ii) ϕ(0) = 0;(iii) ϕ'(s) = f(to + s, [x(to + s , (t1, y1, λ1))], λ1);
Posons g(s, z, [to, t1, y1, λ1)] ) = f(to + s, [z + x(to , (t1, y1, λ1))], λ1), il vientencore:(iv) ϕ'(s) = g(s, z, µ1).
Il suffit pour conclure de vérifier que g satisfait aux hypothèses du théorème 2,ce qui est facile.
3.3. Etude globale.
Théorème 3.4: ( de Cauchy - Lipschitz global) Si f est continue et localement lipschitzienne en y, le problème de Cauchy (E0)admet une solution maximale et une seule et toutes les solutions du problèmesont des restrictions de cette solution maximale.
démonstration: voir [Schwartz], [Z & Q] ou [Dem].
• Deux solutions u et v du problème (E0) définies sur des intervalles ouverts Juet Jv coïncident sur l’intersection de leurs domaines.
On pose A = t ∈ ∩J Ju v ; ∀ ∈s [t0, t[, u(s) = v(s) .
Le théorème d’unicité locale nous assure que A contient un voisinage à droitede t0. Posons β = sup A .
Supposons que β ∈ ∩J Ju v . Par continuité de u et v, on a u(β) = v(β). Lethéorème d’existence et d’unicité locale nous apprend que le problème de

chapitre 1
8
Cauchy de condition initiale y(β) = u(β) admet une solution et une seule auvois de β. Cette solution coïncide sur un voisinage à droite de β avec u et vqui sont égales au delà de β = sup A . Contradiction.
• Soit S l’ensemble des solutions de (E0) définies sur un intervalle contenant t0.
Deux éléments u et v de S coïncident sur Ju ∩ Jv , ce qui permet de définirune fonction U sur la réunion de ces intervalles J = ∪J u , en posant U(t) =u(t) où u est une fonction quelconque de S dont l’intervalle de définitioncontient t. U est maximale par construction et une autre fonction maximale estaussi définie sur J et coïncide avec U.
Remarque: la propriété d’existence et d’unicité locale nous permet de montrerqu’il existe une solution maximale sans faire appel au lemme de Zorn. Lerésultat énoncé en 1 reste plus général.
Exercices
Exercice 3.1: Cas où la fonction f n’est pas lipschitzienne en y.
Etudier le problème de Cauchy y’(t) = t. y 1/2 , y(t0) = y0 . Monter qu'iladmet pour certains couples (t0, y0) une infinité de solutions globales surr (penser à prolonger les solutions du problème y’(t) = t. y 1/2 , y(t1) = y1).
Exercice 3.2: que faire avec le théorème de Cauchy-Lipschitz?
Soit (E) l'équation différentielle y'(t) = sin(t y(t)) (voir plus loin, exercice 4.3une étude plus détaillée). Montrer que si t y t→ ( ) est une solution de (E), y est de signe constant, que lesfonctions t y t→ − ( ) et t y t→ −( ) sont également solutions, en déduire que siy(t) est une solution maximale définie sur un voisinage de 0 c'est une fonctionpaire.

chapitre 1
9
4. Inéquations différentielles.
En majorant/minorant le deuxième membre d’une équation différentielle, onmajore/... ses solutions à droite et on les minore/... à gauche.
Théorème 4.1:Soit F une fonction continue sur ]a,b[ x Ω (où ⊂ r) et u(t) une fonctiondérivable (ou bien continue et admettant des dérivées à droite et à gauche) surun intervalle I contenu dans ]a,b[, qui vérifie l’inéquation différentielle:
u t F t u tu to yo
'( ) ( , ( ))( )
<=
(ou bien: u’d(t), u’g(t) < F(t,g(t))...).
Si g est une solution du problème de Cauchy: g t F t g tg to yo
'( ) ( , ( ))( )
==
, pour tout t ∈ I,
• si t > to, g(t) > u(t)• si t < to, g(t) < u(t).
Remarque: l'hypothèse u t F t u tu to yo
'( ) ( , ( ))( )
<<
conduit à un résultat analogue mais
sur t > t0 seulement.
On généralise ce résultat à des inéquations différentielles dans rm de la façonsuivante:
Théorème 4.2: Considérons une équation différentielle scalaire z’ = M(t,z) où M est unefonction à valeurs réelles positives, continue sur ] α,β[ x r+. Soit to ∈] α,β[. Soit g une solution de l’équation différentielle g’(t) = M(t,g(t)) sur [to,β[. Soit f: U → rm (ouvert U de r x rm), continue et dérivable à droite sur [to,β[,vérifiant l’inéquation différentielle :
fd’(t) < M(t, f(t) - xo ) et f(to) - xo ≤ g(to). Alors,• Pour tout t∈[to, β[, on a : f(t) - xo ≤ g(t).• Si de plus, f est dérivable à gauche, la dérivée à gauche vérifiant la même
inégalité, fg’(t) < M(t, f(t) - xo ), la majoration est stricte en toutpoint t > to et on obtient l’inégalité inverse sur t < to.

chapitre 1
10
références: On trouvera la démonstration de ce résultat dans [Schwartz II p366] (avec l’hypothèse f dérivable) ou dans [V&P], (avec l’hypothèse fdérivable à droite)... ou en exercice, pour ce qui est du cas réel, dans [Dém,prob. 2 p 138]. Signalons enfin la démonstration de [Z Q].
démonstration: par commodité d’écriture démontrons le Théorème 4.1.Remarquons tout d’abord, qu’en un point t0 tel que u(t0) =g(t0), on a: u’(t0) < F(t0, y0) = g’(t0).Sur un voisinage de t0, on a donc u(t) < g(t) si t > t0 et l’inégalité contraire sinon.
Soit alors J =t ∈ [t0,b[ / u(s) < g(s) pour t0 < s < t. J est non vide d'après laremarque précédente.Posons β =sup(J). Montrons par l’absurde que β est égal à b.Si β < b, par continuité de u et de g on a u(β) = g(β) (si u(β) < g(β), l’inégalitéstricte est vérifiée au delà de β). Cette situation est contredite par la remarquepréliminaire. ¤
Exercices
Exercice 4.1: Soit l’équation différentielle y’ = y2 + x et f une solutionmaximale de cette équation définie sur ]α, β[.a) Montrer que β est réel et que f tend vers l’infini en β. b) Montrer que si ]α, β[ contient to assez grand alors α est réel et f tend vers −∞en α.

chapitre 1
11
y ' = y + x;
isocline 0
inflexions
inflexions
inflexions
remarques:• on peut en fait montrer que les solutions s'expriment à l'aide des fonctions
de Bessel (qui ne sont pas des fonctions élémentaires!):
= ( )y x −
x
+ _C1
BesselY ,
-23
23
x / 3 2
BesselJ ,
-23
23
x / 3 2
+ _C1
BesselY ,
13
23
x / 3 2
BesselJ ,
13
23
x / 3 2
• une étude détaillée de cette équation fait l’objet du problème d’agrégationinterne 90 et donc de ses corrigés.
Exercice 4.3:
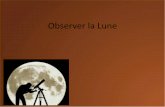
Soit (E) l'équation différentielle y'(t) = sin(t y(t)) (un classique!). a) On étudiera cette équation sur (t > 0, y >0) après avoir établi les résultats del'exercice 3.2.b) Déterminer les isoclines de pentes 0 et ±1.

chapitre 1
12
y' = sin(ty)
(représentation des solutions avec graph'x)c)

chapitre 1
13
Exercice 4.2: interpréter le lemme de Gronwall à la lumière du théorèmede comparaison.
• Soit ϕ une fonction continue telle que ϕ(t) ≤ + ∫A B s dst
tϕ( )0
sur un
intervalle I, montrer que ϕ( )t AeB t t≤ − 0 (lemme de Gronwall). Application: Soit f k-lipschitzienne en y sur un cylindre de sécurité C pour le
problème y t f t y t
y t y'( ) ( , ( ))
( )=
= 0 0
. Montrer que si les fonctions y1 et y2 sont des
solutions εi-approchées de ce problème, (ie: y t f t y ti i i( ) ( , ( ))− ≤ ε et yi(t0) = y0
, i = 1, 2), alors: y (t) y (t) (e e ) e 1k1 2 1 2
k t t 0− ≤ +
−− sur [t0-T, t0 +T].
5. Allure des solutions maximales d’une équation différentielle.
Théorème 5.1 : allure des solutions maximales. Soit F une fonction continue sur ]a,b[ x Ω, localement lipschitzienne en y, et uune solution maximale de l’équation différentielle y’(t) = F(t,y(t)) définie sur unintervalle I = ]α,β[ . Alors, * soit β = b, * soit u(t) tend vers la frontière de Ω lorsque t tend vers β (i.e.: pour tout compact K ⊂ Ω, il existe s ∈ I, tel que t > s ⇒ u(t) ∉ K).
références: Ce théorème est vrai en supposant f continue. Sous l'hypothèse quef est localement lipschitzienne en y la démonstration est plus facile à exposer(oral). On trouvera les deux démonstrations dans [Schwartz II, p 364]. Cethéorème est également démontré dans [V&P] (cas général) , [Avez] (champslocalement lip) et dans [Z Q] .
démonstration: Soit u(t) une solution maximale de y’ = F(t, y) définie sur]α,β[.
* Supposons que β < b et que la deuxième condition ne soit pas remplie: Il existe alors un compact K⊂ Ω et une suite (tn) d’éléments de ]α,β[, delimite β, tels que u(tn) ∈ K.

chapitre 1
14
La suite (u(tn)) admet un point d’accumulation z dans K. Le couple (β, z) admetun voisinage contenu dans le pavé sur lequel F est définie, qui est un cylindrede sécurité pour le problème de Cauchy: y’ = F(t, y) et y(β) = z. Notons C = [β-T, β+T]x B(z,R) ce cylindre (pour lequel MT < R, M majorantde F sur C).
Nous voyons facilement que pour tout (t, x) dans [β-T/3, β+T/3] x B(z,R/3), lecylindre [t-2T/3, t+2T/3] x B(y,2R/3) est un cylindre de sécurité pour leproblème de condition initiale y(t) = x. Ce problème admet une solution qui est définie sur [t-2T/3, t+2T/3]. Cetintervalle contient [β-T/3, β+T/3].
Prenons alors t = tn, notons yn la solution du problème de condition initiale (tn,u(tn)). Posons v(t) = u(t) si t ≤ tn et v(t) = yn(t) si t ≥ tn.
Cette fonction est une solution (car en tn les dérivées à droite et à gauchevérifient y’ = F(tn, u(tn)) = F(tn, yn(tn))...). Elle coïncide donc avec u sur leurensemble de définition commun. C’est un prolongement de u à ]a, β + T[. La contradiction est obtenue.
Exercice:
Exercice 5.1 conditions suffisantes d'existence de solutions globales.a) Soit f une fonction continue sur I x rn .On suppose que, pour tout intervalle [a, b] contenu dans I, il existe une fonction
F: IR+→IR+ telle que: (i) ||f(t,x) || ≤ F( ||x || ) et (ii) dsF s( )0
∞
∫ = +∞ .
Montrer que les solutions maximales de y'(t) =f(t,y(t)) sont des solutionsglobales.indication: introduire r(t)² = || y(t) ||² et dériver. On en déduira que r vérifiel'inéquation différentielle r' ≤ F(r).b) Etudier l'équation à variable séparables y' = a(t) y, où a(t) est définie sur r.
c) Equations linéaires:Montrer qu'une équation linéaire Y'(t) = A(t) Y(t) + b(t) où A: t → L(E) est unefamille d'endomorphismes de E, b t → E, une fonction vectorielle continue a dessolutions maximales qui sont des solutions globales (lemme de Gronwall etallure des solutions maximales).

chapitre 1
15
6. Exemple d’étude détaillée : l’équation y’ = y2 - x .
C'est encore un exemple classique. L'étude de cette équation est proposée comme problème détaillé dans [Dem], p137, elle figure également dans le livre Systèmes différentiels, de Artigue etGautheron chez CEDIC (épuisé en librairie). Enfin [Anal 3] le propose commeexercice corrigé.
Nous suivons la démarche proposée par [Dem] qui peut servir dans une leçon.
a) isoclines: ce sont les courbes d’équations (y2 - x = p), en particulier Io a pouréquation (y2 = x). On notera aussi (y’ <0).
P - (y’ < 0)= (y2-x < 0) est une zone piège ( ie: (xo,f(xo)) ∈P- ⇒ (x,f(x)) ∈P- pour tout x > xo);
En effet: considérons f une solution maximale de l’équation définie sur unintervalle I = ]α,β[ .Soit xo ∈ I, tel que (xo,f(xo)) ∈P-
. Posons J = x > xo/ (x,f(x)) ∈P- et c = supJ.• Si c = β , c’est fini.• Sinon, par continuité, (c,f(c)) ∈ Io.
La pente de la courbe représentative de f en ce point est nulle.Il existe ε > 0 tel que: c- ε< t < c ⇒ (t,f(t)) est extérieur à P-.Cela est contradictoire.
b) lieu des points d’inflexion: En dérivant l’équation et en remplaçant, onobtient: y ’’ = 2yy’-1=2y(y2-x) - 1 = 2y3-2xy - 1.L’ensemble des points d’inflexion est la courbe d’équation (x = y2 - 1
2y), qui a
deux composantes I1(x = y2 - 12y
et y>0), et I2(x = y2 - 12y
et y <0), et partage le
plan en trois parties.
c). Comparons les pentes en un point d’intersection Mo d’une courbe Csolution, et de I1.c.α) La pente de C en ce point est p = 1/2yo;
Celle de I1 est p’ = 21 4
2
3yo
yo+. On a donc p > p’.
Conséquence: au voisinage de xo,si x < xo, la courbe C est au dessous de I1(y’’=0 et y’> 0),si x > xo, elle est au dessus.

chapitre 1
16
c.β ) C ne rencontre I1 qu’en un point:Posons J = x > xo/ f’’(x) > 0, on montre comme ci-dessus, en raisonnant sur lacontinuité de f’’, que c = supJ = β. Il n’y a pas de point d’intersection d’abscissesupérieure à xo.Mo est donc le seul point d’intersection (raisonner par l’absurde...). La solution fa donc une dérivée positive au vois de xo et strictement croissante sur ]xo,+ ∞ [, la courbe ne rencontre nulle part P- qui est une zone piège, enparticulier f est croissante.
c.γ) branches infinies:Rappelons que f est une solution maximale de l’équation définie sur I = ]α,β[. • Montrons que β est réel:Si ce n’est pas le cas, f est définie sur [xo, + ∞ [, on sait que f’ y est croissante(puisque la courbe ne sort pas de (y’’> 0 et y’ >0).
On a donc y’ > po et f(x) > pdtxo
x
∫ + f(xo) = px + f(xo) pour x > xo.
Ainsi, f’(x) = f2(x) - x > f2(x) / 2 pour x > a suffisamment grand.D’après le théorème de comparaison, si x > a, alors f (x) > g(x), où g est lasolution de l’équation différentielle y’= y2 /2 telle que g(a) = f(a). Or g(x) = −
− −
22( )( )
x af a
, a pour pôle a + 2/f(a) > a (en effet la courbe solution
envisagée vérifie par définition f(xo) > 0 est f croît sur l’intervalle [xo, β [...).On a donc β < a + 2 /f(a).
• La courbe admet une asymptote verticale en β.Démonstration directe:
f croît au voisinage de β , admet donc une limite l. Si l est réelle, il existeune solution du problème de Cauchy de condition initiale y(β) = l, ce quipermet de prolonger f.
C’est aussi une conséquence du théorème sur l’allure des solutions maximales.
Toute solution maximale admet une asymptote verticale en α ∈ r.
• Montrons que α est réel:Si ce n’est pas le cas, f est définie sur un voisinage de −∞ , de la forme ]- ∞ , a]où a < -1. Sur un tel intervalle, on a: y’ = y2 - x > y2 +1.Soit g la solution de y’= y2 +1 telle que g(a) = f(a).

chapitre 1
17
D’après le théorème de comparaison, si x < a, f (x) < g(x) = tan(x + c), cettefonction admet pour limite −∞ en x1 < α.
• La courbe admet une asymptote verticale en α:On montre que f admet pour limite - ∞ comme dans le cas précédent.
questions d) et e):
le lecteur se fera un plaisir d’achever le problème.
remarque: on peut montrer (MAPLE V.3) que:
y =' y - x
isocline 0
(y" = 0)
(y" = 0)
(fait avec graph'x)

chapitre 1
18
Annexe 1.
Le théorème du point fixe de Banach:
Théorème 1: théorèmes du point fixe.Soit f : E → E , où E est un espace métrique complet.• On suppose f contractante de rapport k < 1. Alors (i) f admet alors un point fixe a et un seul, (ii) pour tout xo ∈E, la suite (xn) de premier terme x0, définie par la relation
xn+1 = f(xn), converge vers a avec: d(xn, a) ≤−
nkk1
d(xo, x1).
• On suppose qu’une itérée fp de f et contractante de rapport k < 1, alors f admetun point fixe et un seul.
Théorème 2: dépendance du paramètre... Soit f: (x, λ) ∈ E x Λ → f(x,λ) ∈ E, continue en λ. On suppose qu'il existe un entier n et une constante k <1 tels que pour toutλ appartenant à Λ, x → f(x,λ) admet une itérée d'ordre n contractante de rapportk. Alors, pour tout λ , f(.,λ) admet un point fixe unique aλ et l’application λ → aλ,est continue sur Λ.
démonstrations: voir [Schwartz I] ou [Choquet]...

chapitre 1
19
Annexe 2 : méthodes explicites élémentaires.
1. Equations à variables séparables.
Une équation différentielle à variables séparables est une équation de laforme y’(t) = h(t)g(y) définie sur I x J, intervalles ouverts où les fonctions h et gsont continues sur I et J respectivement.
Théorème: On suppose que g(y) ne s’annule pas sur J. Pour tout (to, y0) ∈ I x J,
le problème de Cauchy: y t
y t y'( )
( )=
=
h(t)g(y)
0 0 admet une solution maximale et une
seule définie sur un voisinage de t0 dans I.
démonstration: on justifie facilement que la seule solution du problème est lafonction y(t) = G-1o H(t) où H est la primitive de h nulle en t0 et G la primitivede g nulle en y0.
Exercice 1.1: étudier l'équation y’ = 11
−−
yx
²²
.
Exercice 1.2: On considère l'équation t3sin(y(t))y'(t) = 2 où t ≥ A > 0.
a) Montrer qu'une solution maximale du problème de Cauchy de conditioninitiale y(a) = y0 définie sur [a, b[est monotone et bornée. Que peut on dire del'allure de la solution au voisinage de b?b) Donner une expression de y(t) et discuter de l'intervalle [a, b[ en fonction duchoix de y0.
Exercice 1.3: Soit y’ = h(x)g(y) une équation différentielle à variablesséparables, les fonctions g et h étant positives, définies sur ]0, +∞ [ et ]to, +∞ [respectivement, avec g > 0 et h≥ 0, .
a) Montrer que si l’intégrale 1g t
dta ( )
∞
∫ diverge, alors le problème de Cauchy
y g y h x' ( ) ( )y(t ) y=
= 0 0
admet une solution sur ]0, +∞ [ pour tout y0 > 0.
b) Que dire lorsque l’intégrale converge?

chapitre 1
20
2. Equations linéaires du premier ordre ou s'y ramenant
On est ici censé connaître les méthodes de résolutions des équations linéairesd'ordre 1.
exercice 2.1: équation de Bernoulli.
Soit (E) l'équation différentielle y' = a(t)y + b(t)yα où a et b sont des fonctionscontinues sur I et α est différent de 1.a) Montrer que le changement de fonction inconnue z = yβ (on choisiracorrectement l'exposant) conduit à la résolution linéaire.
b) Résoudre comme cela: (i) y' - 4 yx = x y
(ii) y' - yx = x3 y4
exercice 2.2: équation de Riccati
Soit (E) l'équation différentielle y' = A(t) y² +B(t) y + C(t) (où A, B et C sontcontinues sur I). On sait résoudre une telle équation dés que l'on en connait unesolution particulière f.a) Montrer que le changement de fonction inconnue y = f + u (où u est lanouvelle fonction inconnue) nous ramène à une équation de Bernoulli (B).Exprimer les solutions de (E) en fonction de f.
b) Résoudre y' + y + yx - 4x² = 0

chapitre 1
21
3. Equations homogèmes
exercice 3.1:
On dit qu'une équation est homogène si elle est de la forme y' = f(yt ), f étant
continue sur un intervalle J de r.a) Montrer le théorème suivant (en posant y(t) = t.u(t)...)
• Si f est continue sur ]a, b[, si l'équation f(u) = u n'a pas de solution sur ]a, b[,
alors pour tout (t0, y0) tel que a < t0 y0
< b, le problème de Cauchy y' = f( yt )
y(t0) = y0admet une solution maximale et une seule dont le graphe est contenu dans G =
(t,y)/ a< yt<b.
b) illustration: y' (t) = ( t²-y²(t) + y) = f(yt )
• rechercher les solutions telles que f(u) =u.
• Préciser l'isocline 0 et régionner le domaine de définition de f(yt ).
• Rechercher les solutions maximales. 4.Méthode de variation des constantes pour les équations linéaires. Exemple 4.1: Soit (E) (x+1)y" - y' -xy = C(x) d'équation homogène associée(H): (x+1)y" - y' -xy = 0.
a) Rechercher les solutions de (H) développables en série entières. Soit ϕ unetelle solution. b) On pose y(t) = α(x)ϕ(x). Rechercher les solutions de de (E) et de (H) souscette forme. Existe-t-il des solutions définies sur r?

chapitre 1
22
Exercice 4: système différentiel de Lotka-Volterra (d’après [Arnold p 41], voir aussi l’étude de ce système dans [A et F] t 3).
a) Soit (E) y’(x) = u(x) / v(y) une équation à variables séparables, on lui associe le
système différentiel autonome: (S) x t u x ty t v y t
'( ) ( ( ))'( ) ( ( ))
==
(ou X’ = U(X)...).
Montrer que les trajectoires (ou orbites) du système (S) sont les courbes intégralesde l’équation (E).
Rappel: une courbe intégrale d’une équation différentielle est une courbe declasse C1, ϕ: I→r2 telle que la pente de la tangente en ϕ(t) = (x(t), y(t)) vérifie:y tx t
f x y'( )'( )
( , )= .
b) On considère le système autonome x t kx t ax t y ty t lx t bx t y t
'( ) ( ) ( ) ( )'( ) ( ) ( ) ( )
= −= − +
, dont les
coefficients sont des réels strictement positifs. Montrer que les orbites dusystème sont des courbes fermées, en déduire que les solutions du système sontpériodiques.

chapitre 1
23