L’ensemble des moules, outils, produits finis, semi finis ...
Eléments finis – Notes de cours – Marc Sartor Ch. 4 – Page 1
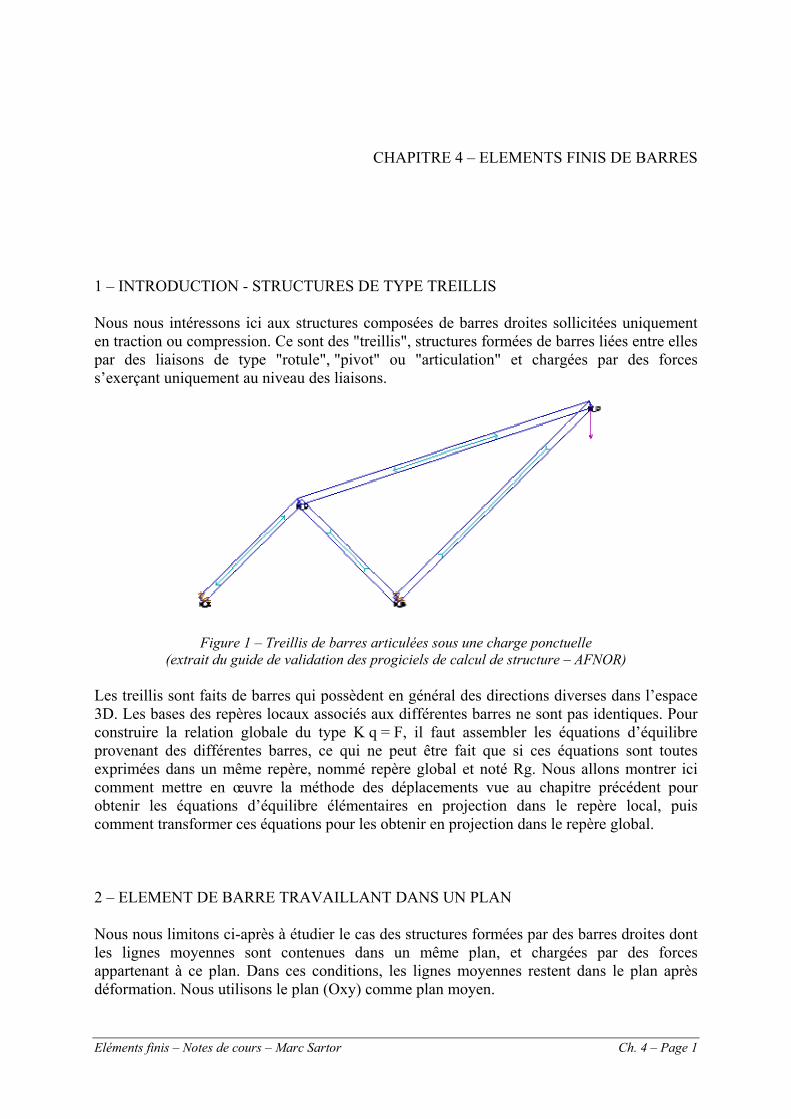
CHAPITRE 4 – ELEMENTS FINIS DE BARRES 1 – INTRODUCTION - STRUCTURES DE TYPE TREILLIS Nous nous intéressons ici aux structures composées de barres droites sollicitées uniquement en traction ou compression. Ce sont des "treillis", structures formées de barres liées entre elles par des liaisons de type "rotule", "pivot" ou "articulation" et chargées par des forces s’exerçant uniquement au niveau des liaisons.
Figure 1 – Treillis de barres articulées sous une charge ponctuelle (extrait du guide de validation des progiciels de calcul de structure – AFNOR)
Les treillis sont faits de barres qui possèdent en général des directions diverses dans l’espace 3D. Les bases des repères locaux associés aux différentes barres ne sont pas identiques. Pour construire la relation globale du type K q = F, il faut assembler les équations d’équilibre provenant des différentes barres, ce qui ne peut être fait que si ces équations sont toutes exprimées dans un même repère, nommé repère global et noté Rg. Nous allons montrer ici comment mettre en œuvre la méthode des déplacements vue au chapitre précédent pour obtenir les équations d’équilibre élémentaires en projection dans le repère local, puis comment transformer ces équations pour les obtenir en projection dans le repère global. 2 – ELEMENT DE BARRE TRAVAILLANT DANS UN PLAN Nous nous limitons ci-après à étudier le cas des structures formées par des barres droites dont les lignes moyennes sont contenues dans un même plan, et chargées par des forces appartenant à ce plan. Dans ces conditions, les lignes moyennes restent dans le plan après déformation. Nous utilisons le plan (Oxy) comme plan moyen.
Eléments finis – Notes de cours – Marc Sartor Ch. 4 – Page 2
2.1 – Formulation en repère local. Dans ce paragraphe 2.1, les différents vecteurs et matrices considérés sont projetés sur les axes du repère local ( )yxiR = de l’élément. Nous ajoutons une barre au dessus des termes qui sont exprimés en projection dans le repère local.
O
y
x
i
y
x
Rg
R
j
α
Figure 2 – Repère local et repère global
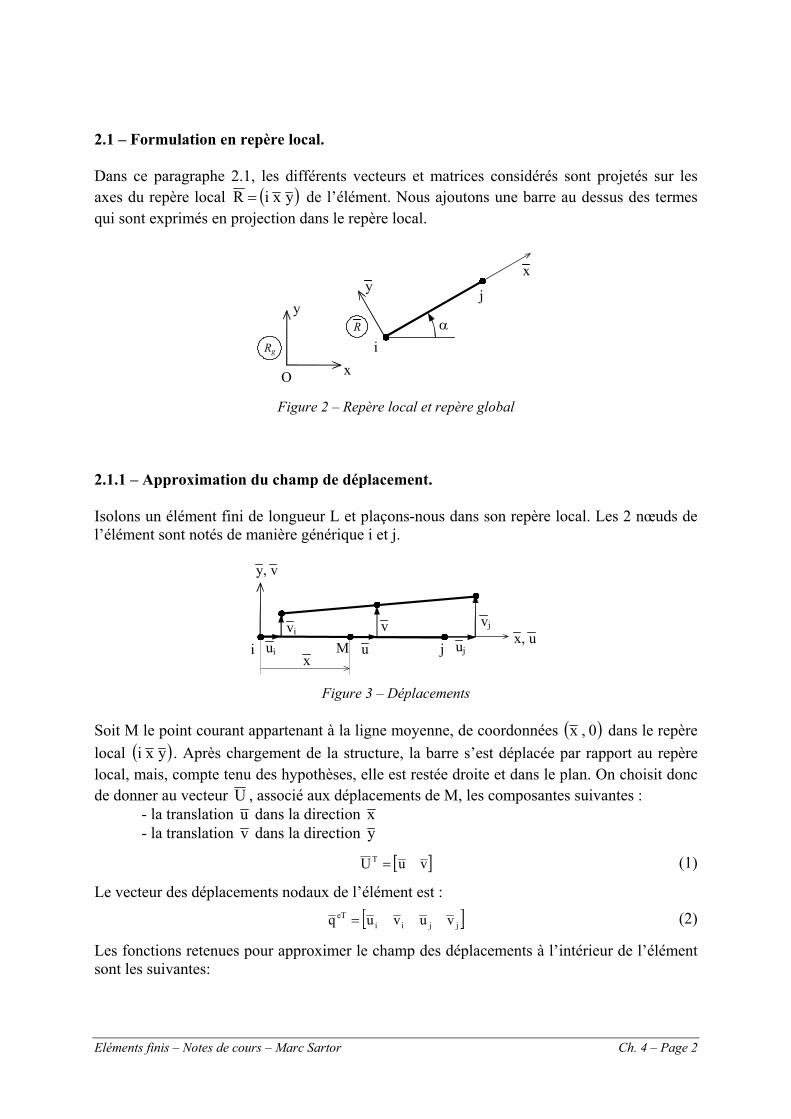
2.1.1 – Approximation du champ de déplacement. Isolons un élément fini de longueur L et plaçons-nous dans son repère local. Les 2 nœuds de l’élément sont notés de manière générique i et j.
i j Mui
y, v
u uj
v vj vi x, u
x Figure 3 – Déplacements
Soit M le point courant appartenant à la ligne moyenne, de coordonnées ( )0,x dans le repère local ( )yxi . Après chargement de la structure, la barre s’est déplacée par rapport au repère local, mais, compte tenu des hypothèses, elle est restée droite et dans le plan. On choisit donc de donner au vecteur U , associé aux déplacements de M, les composantes suivantes : - la translation u dans la direction x - la translation v dans la direction y
[ ]vuUT = (1)
Le vecteur des déplacements nodaux de l’élément est :
[ ]jjiieT vuvuq = (2)
Les fonctions retenues pour approximer le champ des déplacements à l’intérieur de l’élément sont les suivantes:

Eléments finis – Notes de cours – Marc Sartor Ch. 4 – Page 3
( )( )
+==+==
xaaxvvxaaxuu
32
10 (3)
Ces fonctions ne dépendent pas de y , cette coordonnée étant nulle pour tout point M de la barre avant déplacement. Ces fonctions sont linéaires, elles sont donc conformes au modèle de la Résistance des Matériaux dédié aux barres, mais uniquement pour le cas des barres de section constante (que l’on peut assimiler à des ressorts linéaires). Les conditions aux limites permettent d’exprimer les 6 composantes de eq en fonction des 4 coefficients ah inconnus :
( )( )( )( )
+==+==
====
LaaLvvLaaLuu
a0vva0uu
32j
10j
2i
0i
(4)
On peut en déduire l’expression de chaque coefficient ah en fonction des composantes de eq et établir la relation suivante, de la forme eqAU = :
( ) ( )( ) ( )
=
j
j
i
i
vuvu
xN20xN100xN20xN1
vu (5)
où N1, N2 sont deux fonctions d’interpolation définies par :
( )( )
=−=
LxxN2Lx1xN1 (6)
2.1.2 – Déformations et contraintes.
La barre travaille seulement en traction (ou compression). Seule la déformation xxε due à l’effort normal est non nulle. xxε est constante le long de la barre. En nous plaçant dans le plan ( )yxi nous pouvons écrire :
( ) ( )[ ]L
LvvuuLL∆Lε
21
2ij
2ij
xx
−−+−+== (7)
Si nous considérons que les déplacements restent petits devant L, et en faisant un développement limité au premier ordre, il vient :
L
uuε ij
xx
−≅ (8)
Dans le cadre de l’approche matricielle, nous allons aboutir à ce résultat en donnant une forme spécifique à l’opérateur de dérivation C qui intervient dans la relation déformations-déplacements UCε = . Posons :

Eléments finis – Notes de cours – Marc Sartor Ch. 4 – Page 4
[ ] [ ]0xddC = (9)
Alors la relation UCε = s’écrit ici :
[ ] [ ] [ ] ( ) ( )( ) ( )
=
=
j
j
i
i
xx
vuvu
xN20xN100xN20xN1
0xddvu
0xddε (10)
d’où la relation suivante, de la forme eqBε = :
[ ] [ ] [ ]
−=
=
j
j
i
i
j
j
i
i
x,x,xx
vuvu
0101
vuvu
0N20N1ε LL (11)
Ce qui donne :
[ ]
−=
Luu
ε ijxx
(12)
On retrouve bien le résultat de l’équation (8). Nous pouvons en déduire que, dans cette approche, le calcul des déformations néglige l’effet des déplacements dans la direction y . Seules les déformations dans la direction initiale de la barre ( x ) sont considérées. Considérons maintenant les contraintes. Seule la contrainte xxσ est différente de zéro et la loi de Hooke s’écrit simplement :
L
uuEεEσ ij
xxxx
−== (13)
Sous forme matricielle, on peut établir la relation suivante, du type eqBDεDσ == :
[ ] [ ][ ] [ ][ ]
−==
j
j
i
i
xxxx
vuvu
0101EεEσ LL (14)
2.1.3 – Matrice de rigidité de l’élément. Rappelons que la matrice de rigidité Ke de l’élément e est définie par la relation :
eeTe
V
Te qKq21dvεσ
21W == ∫ (15)
où We est l’énergie de déformation de l’élément. Sachant que (14) peut s’écrire DBqσ TTeT = et que eqBε = , la relation (15) induit :
( )∫=V
Te dvBDBK (16)

Eléments finis – Notes de cours – Marc Sartor Ch. 4 – Page 5
Cette relation (16) est très générale et vraie pour tout type d’élément. Dans notre cas, les termes de B et de D sont indépendants de x , nous avons :
( ) ( )BDBLSxdSBDBK TL
0x
Te == ∫ = (17)
où S est la surface de la section droite de la barre. D’où la matrice de rigidité élémentaire de l’élément barre dans son repère local :
[ ] [ ]
−
−
=
=
0000010100000101
SE0101
01
01
K e
LLLE
L
L
LS (18)
2.1.4 – Forces nodales. L’expression de l’énergie potentielle totale associée à l’élément est :
eeTeeeTeee QqqKq21TWV −== - (19)
eQ regroupe les efforts nodaux dans les directions du repère local.
[ ]ejy
ejx
eiy
eix
eT QQQQQ = (20)
Dans cette expression, la composante eixQ représente la force exercée par le nœud i sur
l’élément e dans la direction x . Rappelons que le théorème de l’énergie potentielle totale permet d’établir la relation :
eee QqK = (21)
qui traduit aussi l’équilibre de l’élément. Cela donne dans notre cas :
=
−
−
ejy
ejx
eiy
eix
j
j
i
i
QQQQ
vuvu
0000010100000101
SEL
(22)
Cette relation nous permet d’établir les remarques suivantes : - les déplacements iv et jv qui ne sont pas nuls en règle générale, n’auront aucune
influence sur le calcul des efforts normaux eixQ et e
jxQ dans la direction x
- nous obtiendrons systématiquement 0QQ eiy
eiy ==
La modélisation utilisée est donc telle que les forces aux nœuds restent implicitement dirigées dans la direction initiale de la barre. Tout se passe comme si l’élément ne travaillait que dans la direction x , mais en ayant la possibilité de se déplacer (légèrement) dans la direction y .

Eléments finis – Notes de cours – Marc Sartor Ch. 4 – Page 6
i j ui
y, v
uj
vj vi x, u
Qxj Qxi
Figure 4 – Forces nodales
2.1.5 – Calcul des contraintes et des forces internes. Les équations vues ci-avant permettent d’établir l’expression de la force normale dans la barre (identique quelque soit le point M) :
( )ije
ixe
jx uuLSEQQN −=−== (23)
Les déformations et les contraintes en tout point de la barre se calculent directement avec les équations (12) et (13). On retrouve bien :
( )ijxx uuL1
SENε −== (24)
2.2 – Formulation en repère global Notons maintenant U, eq les vecteurs déplacements en projection dans le repère global
( )yxOR = (voir figure 2), et eQ les forces nodales.
[ ]vuUT = [ ]jjiieT vuvuq = [ ]e
jye
jxe
iye
ixeT QQQQQ = (25)
Soit G la matrice de passage de la base locale ( )yx vers la base globale ( )yx . En notant α l’angle entre les deux bases (voir figure 2), nous avons :
−=
cosαsinαsinαcosα
G que nous notons
−=
cssc
G (26)
Remarquons que T1 GG =− . Nous pouvons mettre en place les relations suivantes :
au point courant M : UGU = (27)
au nœud i :
−=
i
i
i
i
vu
cssc
vu et
−=
eyi
exi
eyi
exi
cssc
QQ (28)
au nœud j :
−=
j
j
j
j
vu
cssc
vu et
−=
eyj
exj
eyj
exj
cssc
QQ (29)
Nous pouvons alors écrire :
eee qHqG00G
q =
= et eee QHQ
G00G
Q =
= (30)
Il est facile de montrer que : T1 HH =− . Nous avons alors :

Eléments finis – Notes de cours – Marc Sartor Ch. 4 – Page 7
eTe qHq = et eTe QHQ = (31)
Si nous reprenons l’équation (21) :
eeTeeTeTeeee QqHKHQHqHKQqK =⇒=⇒= (32)
D’où la matrice de rigidité de l’élément barre dans le repère global :
Tee HKHK = (33)
Ce qui donne :
=
22
22
22
22
e
scss-cs-csccs-c-s-cs-scscs-c-csc
LSEK (34)
Remarque : La méthode des déplacements permet de calculer eq . Il est possible de revenir ensuite aux vecteurs considérés dans le repère local en utilisant l’équation (31). Le calcul des contraintes dans la barre peut toutefois être effectué directement à partir de eq en considérant que :
[ ]
−−===
j
j
i
i
vuvu
scscLEeTe qHBDqBDσ (35)

Eléments finis – Notes de cours – Marc Sartor Ch. 4 – Page 8

Eléments finis – Notes de cours – Marc Sartor Ch. 4 – Page 9
4 - EXERCICES Exercice 4.1 – Treillis n°1 Considérons un treillis formé de trois barres articulées comme défini par la figure ci-après.
3 E, S
2 E, S, L
1 E, S, L
1
2
3
P
x
y
On pose LSE
=a et L22
SE=d
Appliquer la méthode des déplacements au calcul de cette structure :
1.Etablir la matrice de rigidité de chaque élément. 2. Etablir la matrice de rigidité [K] du treillis. 3. Déterminer les conditions aux limites 4. Donner le système qui permettra de calculer les déplacements. On donne l'inverse K'-1 de la matrice K' qui apparaît dans ce système :
+=−
dadddddd
daK
20
01' 1
5 - Etablir l'expression des déplacements des noeuds. 6 - Etablir l'expression des actions de liaison. 7 - Etablir l'expression de la contrainte dans la barre 3.
Ci-après quelques documents supports pour les calculs. * Tableau récapitulatif des caractéristiques des éléments
Elément Noeud I Noeud J E.Sect/lg α c = cosα s = sinα

Eléments finis – Notes de cours – Marc Sartor Ch. 4 – Page 10
* Matrices de rigidité des éléments (dans le repère global)
[ ]K1 =
. . . .
. . . .
. . . .
. . . .
[ ]K 2 =
. . . .
. . . .
. . . .
. . . .
[ ]K 3 =
. . . .
. . . .
. . . .
. . . .
* Assemblage et conditions aux limites
.
.
.
.
.
.
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
.
.
.
.
.
.
=
•
* Calcul des déplacements
.
.
.
. . .
. . .
. . .
.
.
.
=
•
* Calcul des actions de liaison
.
.
.
. . .
. . .
. . .
.
.
.
=
•

Eléments finis – Notes de cours – Marc Sartor Ch. 4 – Page 11
Exercice 4.2 – Treillis n°2 Considérons un treillis formé de trois barres articulées comme défini par la figure ci-après.
3
2
E, S, L
1 E, S, L
1
2
3 H
V
x
y
On pose LSE
=a
Appliquer la méthode des déplacements au calcul de cette structure :
1.Etablir la matrice de rigidité de chaque élément. 2. Etablir la matrice de rigidité [K] du treillis. 3. Déterminer les conditions aux limites
4. Donner le système qui permettra de calculer les déplacements. 5. Etablir l'expression des déplacements des noeuds. 6. Etablir l'expression des actions de liaison. 7. Etablir l'expression de la contrainte dans la barre 3.
Ci-après quelques documents supports pour les calculs. * Tableau récapitulatif des caractéristiques des éléments
Elément Noeud I Noeud J E.Sect/lg α c = cosα s = sinα
2L,2S,E
Eléments finis – Notes de cours – Marc Sartor Ch. 4 – Page 12
* Matrices de rigidité des éléments (dans le repère global)
[ ]K1 =
. . . .
. . . .
. . . .
. . . .
[ ]K 2 =
. . . .
. . . .
. . . .
. . . .
[ ]K 3 =
. . . .
. . . .
. . . .
. . . .
* Assemblage et conditions aux limites
.
.
.
.
.
.
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
.
.
.
.
.
.
=
•
* Calcul des déplacements
.
.
.
. . .
. . .
. . .
.
.
.
=
•
* Calcul des actions de liaison
.
.
.
. . .
. . .
. . .
.
.
.
=
•
Eléments finis – Notes de cours – Marc Sartor Ch. 4 – Page 13
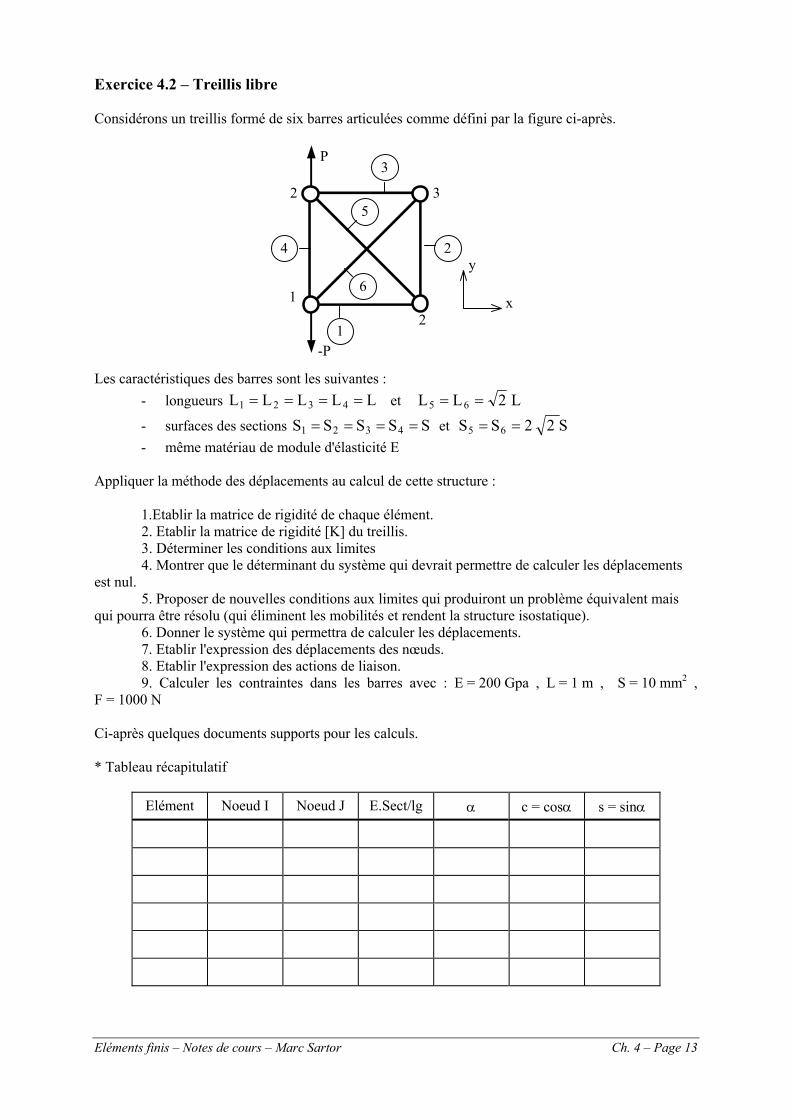
Exercice 4.2 – Treillis libre Considérons un treillis formé de six barres articulées comme défini par la figure ci-après.
5
1
4
1
2
2
P
3
-P
3
2
6x
y
Les caractéristiques des barres sont les suivantes :
- longueurs LLLLL 4321 ==== et L2LL 65 ==
- surfaces des sections SSSSS 4321 ==== et S22SS 65 == - même matériau de module d'élasticité E
Appliquer la méthode des déplacements au calcul de cette structure :
1.Etablir la matrice de rigidité de chaque élément. 2. Etablir la matrice de rigidité [K] du treillis. 3. Déterminer les conditions aux limites
4. Montrer que le déterminant du système qui devrait permettre de calculer les déplacements est nul.
5. Proposer de nouvelles conditions aux limites qui produiront un problème équivalent mais qui pourra être résolu (qui éliminent les mobilités et rendent la structure isostatique).
6. Donner le système qui permettra de calculer les déplacements. 7. Etablir l'expression des déplacements des nœuds. 8. Etablir l'expression des actions de liaison. 9. Calculer les contraintes dans les barres avec : E = 200 Gpa , L = 1 m , S = 10 mm2 ,
F = 1000 N Ci-après quelques documents supports pour les calculs. * Tableau récapitulatif
Elément Noeud I Noeud J E.Sect/lg α c = cosα s = sinα

Eléments finis – Notes de cours – Marc Sartor Ch. 4 – Page 14
* Matrice de rigidité des éléments :
[ ]K1 =
. . . .
. . . .
. . . .
. . . .
[ ]K 2 =
. . . .
. . . .
. . . .
. . . .
[ ]K 3 =
. . . .
. . . .
. . . .
. . . .
[ ]K 4 =
. . . .
. . . .
. . . .
. . . .
[ ]K5 =
. . . .
. . . .
. . . .
. . . .
[ ]K 6 =
. . . .
. . . .
. . . .
. . . .
* Assemblage et premières conditions aux limites
.
.
.
.
.
.
.
.
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
.
.
.
.
.
.
.
.
=
•
* Calcul des déplacements
.
.
.
.
.
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
.
.
.
.
.
=
•
* Calcul des actions de liaison
.
.
.
. . . . .
. . . . .
. . . . .
.
.
.
.
.
=
•