
Emd1 2000 2001
4
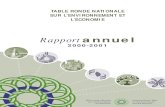
Université de Boumerdes année 2000-2001 Faculté des sciences Département de physique E.M.D. 01 Mécanique Rationnelle : année 2000-2001 Durée : 01h 30mn Exercice 01 : (03 pts) Déterminer le moment par rapport à l’origine O de la force : → → → → + - - = k j i F 5 3 2 appliquée au point A pour les cas suivants : Le vecteur position du point A est donné par : a) → → → → + - = k j i r 4 3 2 1 ; b) → → → → - + = k j i r 10 6 4 2 Déterminer dans les deux cas l’angle que fait la force avec le vecteur position : → r . Exercice 02 : (09 pts) Une plaque triangulaire homogène ABC de poids P est lié à un support fixe par l’intermédiaire d’une articulation sphérique au point A et cylindrique au point C. On donne OA=OC=OB = a. La plaque est maintenue en position inclinée d’un angle ° = 30 α par rapport au plan horizontal (xoz) par un câble inextensible BD, accroché au point D à un mur vertical. La corde fait un angle de ° = 60 β avec la verticale. Solution Une charge de poids Q = 2P est suspendue au point B∈ (yoz). Le centre de gravité G de la plaque est situé 1/3 de OB à partir de O. 1. Ecrire les équations d’équilibre statique ; 2. Déterminer les réactions des liaisons aux points A et C ainsi que la tension du câble. B A y o C D z x Exercice 03 : (08 pts) Le système suivant est composé d’un quart de disque homogène évidé d’un triangle rectangle. 1) Déterminer le centre d’inertie du solide en utilisant le théorème de Guldin ; 2) Retrouver les résultats précédents par la méthode d’intégration. (Démontrer tous les résultats même les calculs des surfaces) 3a/4 a/4 a/2 x y a/2
-
Upload
ma-bensaaoud -
Category
Documents
-
view
198 -
download
0
Transcript of Emd1 2000 2001

Université de Boumerdes année 2000-2001Faculté des sciencesDépartement de physique
E.M.D. 01 Mécanique Rationnelle : année 2000-2001Durée : 01h 30mn
Exercice 01 : (03 pts) Déterminer le moment par rapport à l’origine O de la force :
→→→→+−−= kjiF 532 appliquée au
point A pour les cas suivants : Le vecteur position du point A est donné par :
a) →→→→
+−= kjir 4321 ; b)
→→→→−+= kjir 10642
Déterminer dans les deux cas l’angle que fait la force avec le vecteur position : →r .
Exercice 02 : (09 pts) Une plaque triangulaire homogène ABC de poids P est lié à un support fixe par l’intermédiaire
d’une articulation sphérique au point A et cylindrique au point C. On donne OA=OC=OB = a.
La plaque est maintenue en position inclinée d’un angle °= 30α par rapport au plan horizontal
(xoz) par un câble inextensible BD, accroché au point D à un mur vertical. La corde fait un angle
de °=60β avec la verticale.
Solution
Une charge de poids Q = 2P est suspendue au point
B∈ (yoz).
Le centre de gravité G de la plaque est situé 1/3 de
OB à partir de O.
1. Ecrire les équations d’équilibre statique ;
2. Déterminer les réactions des liaisons aux points A
et C ainsi que la tension du câble.
B A
y
o
C
D
z
x
Exercice 03 : (08 pts) Le système suivant est composé d’un quart de
disque homogène évidé d’un triangle rectangle.
1) Déterminer le centre d’inertie du solide en
utilisant le théorème de Guldin ;
2) Retrouver les résultats précédents par la
méthode d’intégration. (Démontrer tous les
résultats même les calculs des surfaces)
3a/4
a/4
a/2 x
y
a/2

Exercice 01 :
→→→→→→→−→
→−−−=
−−
∧
−=∧=∧= kjiFrFOAOFM 12183
5
3
2
4
3
2
)/( 11
→→→→→−→
→=
−−
∧
−=∧=∧= 0
5
3
2
10
6
4
)/( 22 FrFOAOFM →→
⇒ Fr //2
NF 16,62594 =++=→
; Nr 38,516941 =++=→
22,41 14,33
25 cos cos 1
1
11111 °=⇒=
•
•=⇒•=• →→
→→→→→→
θθθrF
rFrFrF
πθθθ =⇒=−=•
•=⇒•=• →→
→→→→→→
2
2
22222 -1
76
76 cos cos
rF
rFrFrF
→→⇒ Fr //2
mais de sens
contraire.
Exercice 02 :
Nous avons OA = OB = OC = a ; 3
aOG = ; Q = 2P ; °= 30α , °=60β
Le point )(yozB ∈ ;
→
Az
Ay
Ax
A
R
R
R
R ;
→
Cz
CyC
R
RR
0
;
−
→
ββ
sin
cos
0
T
TT ;
−
→
0
2
0
PQ ;
−
→
0
0
PP
−
0
0
a
A ;
0
0
a
C ;
αα
cos
sin
0
a
aB ;
αα
cos)3/(
sin)3/(
0
a
aG ⇒
→−
0
0
2a
AC ;
→−
αα
cos
sin
a
a
a
AB ;
→−
αα
cos)3/(
sin)3/(
a
a
a
AG
B A
y
o
C
D
z
x
G

Le système est en équilibre statique, nous avons alors :→→
=∑ 0i
iF ⇔ →→→→→→
=++++ 0PQTRR CA (1)
→→−=∑ 0/
iAiM ⇔
→→→−→→−→→−→→−=∧+∧+∧+∧ 0PAGQABTABRAC C
(2)
La projection de l’équation (1) sur les axes donne trois équations scalaires :
0=AxR (3)
02cos =−−++ PPTRR CyAy β (4)
0sin =−+ βTRR CzAz (5)
En développant l’équation vectorielle (2), nous obtenons trois autres équations scalaires :
=
−∧
+
−∧
+
−∧
+
∧
0
0
0
0
0
cos)3/(
sin)3/(
0
2
0
cos
sin
sin
cos
0
cos
sin
0
0
0
2
P
a
a
a
P
a
a
a
T
T
a
a
a
R
R
a
Cz
Cy
αα
αα
ββ
αα
0cos3
cos2coscossinsin =++−− ααβαβα aPaPaTaT (6)
0sin2 =+− βaTaRCz (7)
02cos2 =−−+ aPaPaTaRCy β (8)
Les six équations permettent de trouver toutes les inconnues :
(3) ⇒ 0=AxR (6) ⇒ PT 32,2= ; (7) ⇒ PRCz =
(8) ⇒ PRCy 92,0= ; (5) ⇒ PRAz = ; (4) ⇒ PRAy 92,0=
d’où : PRRRR AzAyAxA 358,1222 =++= ; PRRRR CzCyCxC 358,1222 =++=
Exercice 03 :
1) Centre d’inertie par le théorème de Guldin : 16
3
4
22 aaS tot −= π
aaa
aaa
S
VV
S
Vx
tot
cônesphèredemi
tot
ytotG 506,0
16
3
4.2
4
3.
2..
3
1.
3
4.
2
1
.2
_
.2 22
23
/ =
−
−
=== −
ππ
ππ
ππ
aaa
aaa
S
VV
S
Vy
tot
cônesphèredemi
tot
xtotG 479,0
16
3
4.2
2.
4
3..
3
1.
3
4.
2
1
.2
_
.2 22
23
/ =
−
−
=== −
ππ
ππ
ππ

1) Centre d’inertie par les intégrales: a) Soit S1 la surface du quart de disque :
4
.;
20;0;.
22
00
11
adrdrSardrdrds
a πθπθθ
π
==≤≤≤≤= ∫∫
πθθθ
πθθ
π
π
3
4.cos...
.
4..cos.
.
4.
1 2
00
22
021
11
1
adddrr
adrdrr
axds
Sx
aa
S
G ==== ∫∫∫∫
πθθθ
πθθ
π
π
3
4.sin...
.
4..sin.
.
4.
1 2
00
22
021
11
1
adddrr
adrdrr
ayds
Sy
aa
S
G ==== ∫∫∫∫
a) Soit S2 la surface du triangle :
dydxds .2 = ; la droite limitant le triangle a pour équation :
−= xa
y22
3 ; où
−= ya
x4
3
3
2
22
0
)2
(2
3
0
2
0
2 16
3.
22
3..
2
adxxa
dydxdydxS
ax
aa
S
=
−=== ∫∫∫∫
−
6.
22
3.
3
16.
3
161 2
02
)2
(2
3
0
2
022
22
2
adxx
ax
adyxdx
axds
Sx
ax
aa
S
G =
−=== ∫∫∫∫
−
4.
4
3
3
2.
3
16.
3
161 4
3
02
)4
3(
3
2
0
4
3
022
22
2
adyy
ay
adxydy
ayds
Sy
ay
aa
S
G =
−=== ∫∫∫∫
−
aaa
aaaa
SS
xSxSx GGG 506,0
16
3
4
6.
16
.3
3
4.
4
...
22
22
21
2211 =−
−=
−−
=π
ππ
aaa
aaaa
SS
ySySy GGG 479,0
16
3
4
4.
16
.3
3
4.
4
...
22
22
21
2211 =−
−=
−−
=π
ππ













![o 97 [3] A.N. (C.R.) Vendredi 1 décembre 2000 ASSEMBLÉE …archives.assemblee-nationale.fr/11/cri/2000-2001... · 2010-01-29 · Année 2000. – No 97 [3] A.N. (C.R.) ISSN 0242-6765](https://static.fdocuments.fr/doc/165x107/5e4abd55cda78f7ef15bf479/o-97-3-an-cr-vendredi-1-dcembre-2000-assemble-2010-01-29-anne-2000.jpg)


