Actions mécaniques Forces. I Les actions mécaniques et leurs effets.

ANNEXES
ANNEXE 1 : PARAMETRES DU MODELE 3-PHASES
ANNEXE 2 : MICROTOMOGRAPHIE X HAUTE RESOLUTION
ANNEXE 3 : METHODE DE MESURE PAR ONDES ULTRASONORES
ANNEXE 5 : CALCUL DES PROPRIETES ELASTIQUES EFFECTIVES PAR FFT
ANNEXE 6 : SOUS ROUTINES GENEREES A L’AIDE DE MATLAB POUR LE CALCUL
TENSORIEL NUMERIQUE
ANNEXE 7 : ESTIMATION DES PROPRIETES EFFECTIVES D’UN AL/SIC FISSURE
AVEC CALCUL ELASTO PLASTIQUE


Annexes
219
ANNEXE 1 : PARAMETRES DU MODELE 3-PHASES
Les relations qui sont reportées ici proviennent de la reformulation générale de HERVÉ
et ZAOUI suscitée pour des fibres et des sphères à n couches en isotropie transverse (IT) et
isotropie (I) respectivement. Pour la symétrie IT (d'axe repéré par la direction «1» ), 5
composantes indépendantes du tenseur d'élasticité C peuvent être fixées à partir des relations
du tableau 1.1.
Tableau 1.1 Relations entre modules d’élasticité en symétrie isotrope transverse (IT)
Elles se réduisent à 2 en symétrie I, en général µ , et υ
µλ21
23−
=+= Ek , modules de
cisaillement et de compressibilité (le module de compressibilité transverse s'écrit µλ +=Tk
Pour le modèle 3-phases, les équations à résoudre pour déterminer les modules d'élasticité
effectifs s’écrivent, dans le cas IT (fibres), avec 2)'
(rr=ρ :
(1.1)
avec dans cette dernière équation :
(1.2)

Annexes
220
avec les matrices, vecteurs et scalaires P, Q, W, M, N donnés dans le tableau 1.2 et
avec dans N :
(1.3)
Tableau 1.2 Matrice, vecteurs et scalaires P, Q, M, N, W du modèle 3-phases pour les fibres
Dans le cas de la symétrie I (sphères), les deux relations nécessaires s’écrivent :
(1.4)
avec la définition des différents coefficients A,B,C et Z :
(1.5)

Annexes
221
En utilisant les matrices P et N du tableau 1.3 et les coefficients :
(1.6)
Tableau 1.3 Matrices P, N du modèle 3-phases pour les sphères

Annexes
222

Annexes
223
ANNEXE 2 : MICROTOMOGRAPHIE X HAUTE RESOLUTION
Il s'agit là d'une technique d'imagerie novatrice puisqu'elle est à même de remplacer les
observations effectuées habituellement en surface par la visualisation directe de la structure
interne des corps solides. Dans le domaine de l'analyse microstructurale, cela présente des
atouts manifestes notamment pour la détermination en volume des anisotropies de
distribution, la caractérisation des formes des renforts, la simplicité de préparation des
échantillons ou encore la possibilité d'effectuer des observations in-situ sous charge [18]. En
outre elle est en constant développement vers des résolutions sub-microniques.
Dans notre laboratoire, deux dispositifs expérimentaux sont utilisés: un premier à
l'ESRF (European Synchrotron Radiation Facility, ligne «ID 19» ) pour les résolutions de 1-
10 µm, et un second au sein du laboratoire CNDRI de l'INSA de Lyon pour les résolutions de
10-100 µm. Le principe est le même dans les deux cas, ils se distinguent seulement par la
taille des appareillages. Le second, que nous ne détaillerons pas, est utilisable à un rythme
quotidien et occupe un volume réduit (10m3, échantillons de taille 20x5x5 mm, temps
d'acquisition 2-3h).
Figure 2.1 : dispositif d’acquisition microtomographique [85]
La technique mise à disposition à l'ESRF tire parti des propriétés physiques du
rayonnement X émis tangentiellement par les électrons accélérés dans l'anneau du
synchrotron. La distance entre la source émettrice et l'échantillon est de 150 m pour une taille
de source de 100 µm (cf. figure 2.1) qui peut alors être considérée comme ponctuelle. Le
faisceau est rendu monochromatique par réflexion sur deux mono cristaux de Silicium et son

Annexes
224
énergie peut être réglée entre 1 et 100 keV. L'échantillon à observer (dimensions 2x0.8x0.8
mm) est enserré dans un porte-échantillon lui-même fixé sur un goniomètre autorisant un
positionnement (translation, rotation) de haute précision. Avant manipulation, la platine du
goniomètre est réglée de telle sorte que son axe de rotation soit parfaitement perpendiculaire à
la direction horizontale de l'écran. Une caméra CCD (charge-coupled device, taille
1024x1024 points) mesure alors l'intensité du rayonnement recueilli. On forme ainsi une
image radiographique communément appelée «projection» et ce pour chaque angle ( de 600 à
900) entre le faisceau et l'échantillon, ajustée à l'aide du goniomètre. Ces angles de rotation
repérés par rapport à la position initiale sont tous égaux et représentent un angle total de 180°.
La durée complète d'acquisition est de 2 à 4h.
D'une manière générale, le contraste observé sur les projections est un contraste
d'atténuation classique qui pour une épaisseur z d'échantillon traversée résulte en une intensité
de faisceau I(z) déduite de l'intensité incidente 10 par: I(z) = Ioe-µZ où µ est un coefficient
d'absorption caractéristique du matériau traversé. Dans le cas d'un matériau multiphasé (N
phases de coefficients µi, densités volumiques ρi, densité du composite ρ et de concentrations
pondérales xi) le coefficient d'absorption massique global est :
∑=
=N
i ixi
i1 ρ
µ
ρµ
Les phénomènes d'interaction sous-jacents (diffusion cohérente, diffusion COMPTON)
photon/matière indiquent que le contraste est essentiellement atomique puisque µ α Z4 avec Z
numéro atomique des éléments impliqués. L'image tridimensionnelle du matériau est ensuite
reconstruite à l'aide d'un algorithme spécifique qui prend pour base les différents paramètres
expérimentaux.
Annexes
225
ANNEXE 3 : METHODE DE MESURE PAR ONDES ULTRASONORES
1 --DISPOSITIF EXPERIMENTAL
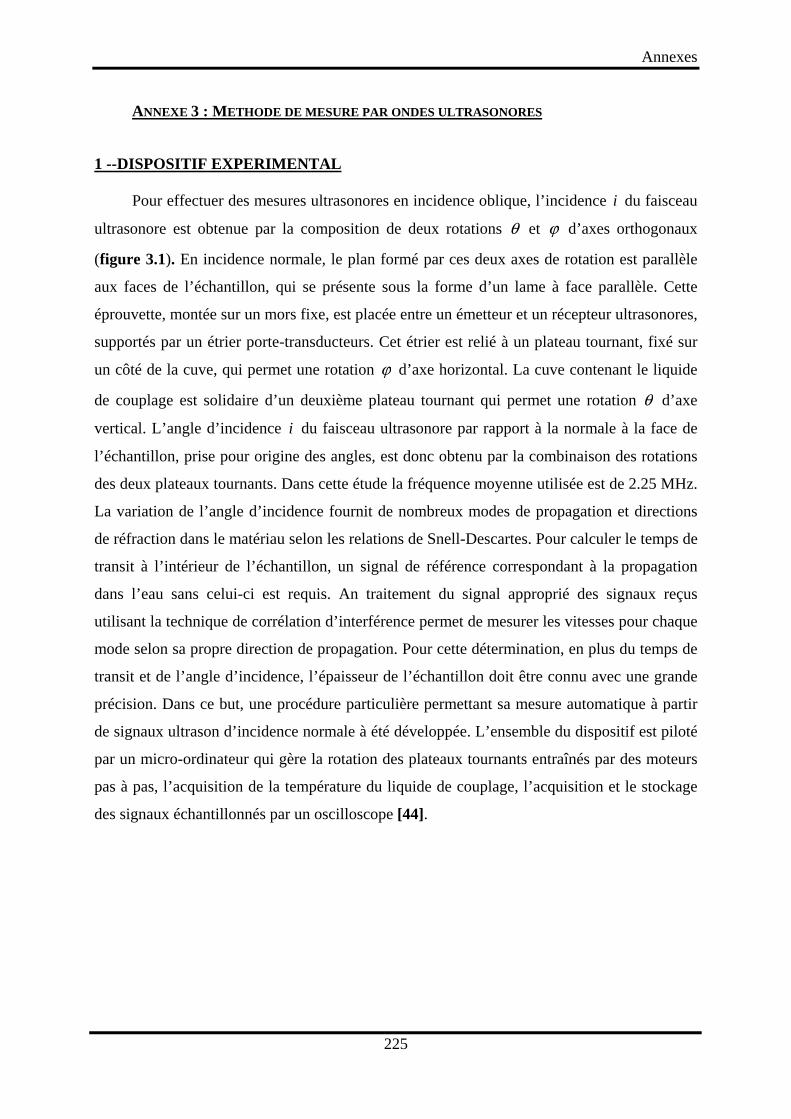
Pour effectuer des mesures ultrasonores en incidence oblique, l’incidence i du faisceau
ultrasonore est obtenue par la composition de deux rotations θ et ϕ d’axes orthogonaux
(figure 3.1). En incidence normale, le plan formé par ces deux axes de rotation est parallèle
aux faces de l’échantillon, qui se présente sous la forme d’un lame à face parallèle. Cette
éprouvette, montée sur un mors fixe, est placée entre un émetteur et un récepteur ultrasonores,
supportés par un étrier porte-transducteurs. Cet étrier est relié à un plateau tournant, fixé sur
un côté de la cuve, qui permet une rotation ϕ d’axe horizontal. La cuve contenant le liquide
de couplage est solidaire d’un deuxième plateau tournant qui permet une rotation θ d’axe
vertical. L’angle d’incidence i du faisceau ultrasonore par rapport à la normale à la face de
l’échantillon, prise pour origine des angles, est donc obtenu par la combinaison des rotations
des deux plateaux tournants. Dans cette étude la fréquence moyenne utilisée est de 2.25 MHz.
La variation de l’angle d’incidence fournit de nombreux modes de propagation et directions
de réfraction dans le matériau selon les relations de Snell-Descartes. Pour calculer le temps de
transit à l’intérieur de l’échantillon, un signal de référence correspondant à la propagation
dans l’eau sans celui-ci est requis. An traitement du signal approprié des signaux reçus
utilisant la technique de corrélation d’interférence permet de mesurer les vitesses pour chaque
mode selon sa propre direction de propagation. Pour cette détermination, en plus du temps de
transit et de l’angle d’incidence, l’épaisseur de l’échantillon doit être connu avec une grande
précision. Dans ce but, une procédure particulière permettant sa mesure automatique à partir
de signaux ultrason d’incidence normale à été développée. L’ensemble du dispositif est piloté
par un micro-ordinateur qui gère la rotation des plateaux tournants entraînés par des moteurs
pas à pas, l’acquisition de la température du liquide de couplage, l’acquisition et le stockage
des signaux échantillonnés par un oscilloscope [44].
Annexes
226
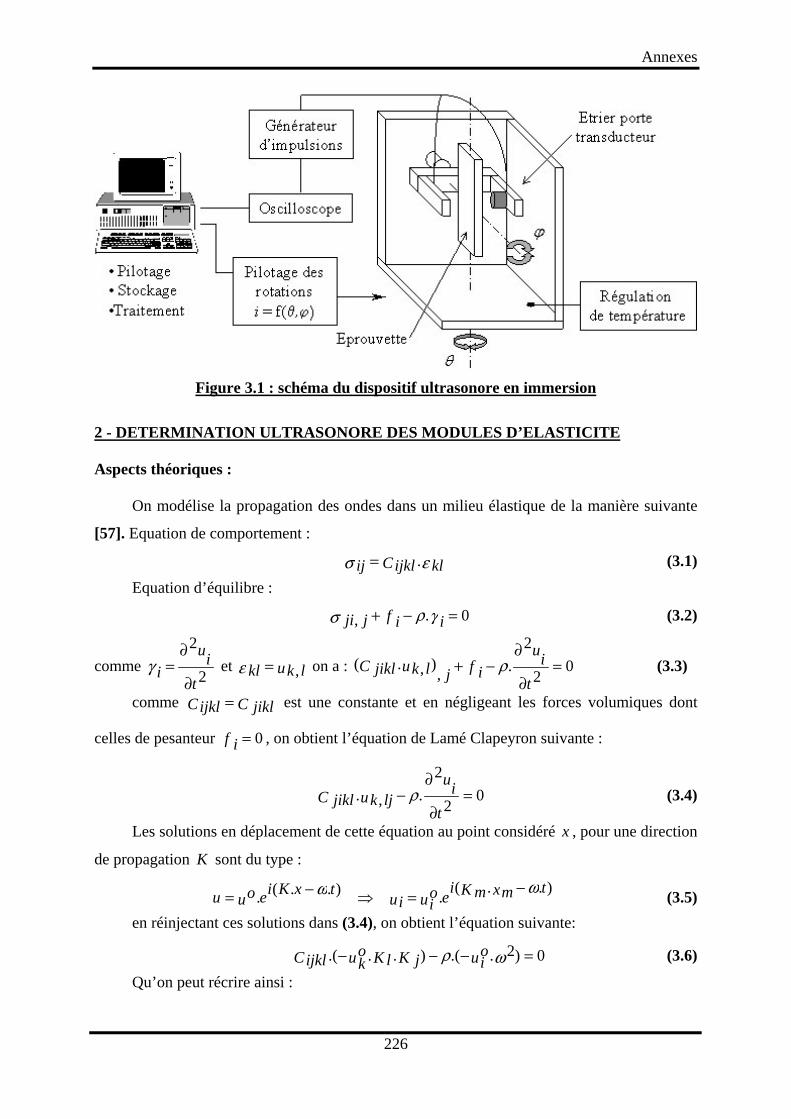
Figure 3.1 : schéma du dispositif ultrasonore en immersion
2 - DETERMINATION ULTRASONORE DES MODULES D’ELASTICITE Aspects théoriques :
On modélise la propagation des ondes dans un milieu élastique de la manière suivante
[57]. Equation de comportement :
εσ klCijklij .= (3.1)
Equation d’équilibre :
0., =−+ γρσ if ijji (3.2)
comme 2
2
tiu
i∂
∂=γ et u lkkl ,=ε on a : 0
2
2.),.(
, =∂
∂−+
tiu
f iu lkC jikl j ρ (3.3)
comme C jiklCijkl = est une constante et en négligeant les forces volumiques dont
celles de pesanteur 0=f i , on obtient l’équation de Lamé Clapeyron suivante :
02
2.,. =
∂
∂−
tiu
u ljkC jikl ρ (3.4)
Les solutions en déplacement de cette équation au point considéré x , pour une direction
de propagation K sont du type :
)..(. txKieuou ω−= ⇒ )..(. txmK mieuoiui
ω−= (3.5) en réinjectant ces solutions dans (3.4), on obtient l’équation suivante:
0)2..()...( =−−− ωρ uoiK jK luo
kCijkl (3.6)
Qu’on peut récrire ainsi :

Annexes
227
0)..2...( =− uokkiK jK lCijkl δωρ (3.7)
En supposant qu’une onde se propage, 0≠uok , pour réaliser la condition (3.7), il faut
que :
0).2...( =− δωρ ikK jK lCijkldét (3.8)
Cette dernière équation est connue sous le nom d’équation de Christoffel, qui rassemble
les conditions de propagation d’une onde plane à travers un matériau élastique, anisotrope
homogène [32].
02 =−Γ ikVik δρ (3.8)
où Γkl = CijklKjKl est le tenseur de Christoffel, ρ est la densité de masse, V est la vitesse de
phase et δil le symbole de Kronecker. Cijkl est la matrice de rigidité de dimension 4. K est le
vecteur unitaire normale au plan de l’onde. Au lieu du tenseur Cijkl, il est plus pratique
d’utiliser la matrice CIJ , notation contractée usuelle. Pour un matériau homogène élastique et
anisotrope la vitesse de propagation des ondes ultrasonores dépend donc de la masse
volumique et des constantes d’élasticité du matériau ainsi que de la direction de propagation
[129]. L’orientation des constituants, c’est à dire des fibres et des particules dans les
composites, détermine la symétrie de la structure à l’échelle macroscopique. La symétrie
orthotrope qui est suffisamment générale pour décrire la plupart des composites, à 9
constantes élastiques indépendantes. Le système de coordonnées est déterminé de manière à
ce que l’axe 1 soit suivant la direction des fibres et l’axe 3 suivant son épaisseur comme
montré sur la figure 3.2 .
[ ]
⎟⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
=
66
55
44
33
2322
131211
0.00000000000
CCSym
CCCCCCC
CIJ
Figure 3.2 : matrice élastique orthotrope, axe de symétrie du matériau et plan de
propagation

Annexes
228
Détermination des constantes élastiques : la résolution du problème inverse
Les constantes élastiques doivent être obtenues à partir des mesures de vitesse. C’est
typiquement un problème inverse. Concernant, les composites unidirectionnels, l’isotropie
transverse est définie par 5 constantes élastiques indépendantes. Quoiqu’il en soit, même pour
ce type de composite, l’orthotropie peut apparaître à cause d’un arrangement initial particulier
des fibres ou de la texture matricielle ou bien lors de changements microstructuraux dus au
développement de l’endommagement [7], [32], [126].
Ainsi, dans cette étude, nous considérerons les deux symétries. Pour résoudre le
problème inverse précédemment évoqué, on peut en mesurant le nombre de vitesses
ultrasoniques appropriées, déterminer le nombre requis de constantes élastiques
indépendantes. Cette approche requiert plusieurs orientations de sections du matériau.
Quoiqu’il en soit, ce sont des mesures destructives et la caractérisation complète de matériaux
fabriqués avec de faibles épaisseurs ne peut être obtenue de cette manière. De plus, cette
méthode n’est pas adaptée quand le but est de suivre le changement des propriétés du
matériau durant l’endommagement. C’est pour cela qu’une méthode alternative utilisant un
unique échantillon en forme de lame a été préférée. Elle est basée sur de multiples mesures de
vitesse dans des plans de propagation variés (symétrique et non symétrique). De telles
mesures sont généralement obtenues en utilisant une technique d’immersion et un angle
d’incidence variable. Dans de telles configurations, pour les ondes de cisaillement, seulement
les ondes polarisées dans un plan de propagation appelé quasi-vertical de cisaillement (QVC)
peuvent être extraites de l’eau. Le problème est que l’on obtient en général plus de données
(vitesses mesurées) que l’on a d’inconnues (constantes élastiques) à déterminer. La méthode
la plus appropriée pour résoudre ce problème est d’utiliser une méthode d’optimisation basée
sur une technique de minimisation non linéaire comme cela a été initialement proposé par
Hosten et Castagnède [77] et améliorée par de nombreux auteurs [2], [32], [78], [105].
La détermination des constantes élastiques est obtenue par minimisation des moindres
carrés de l’écart entre les vitesses expérimentales et théoriques. L’algorithme de minimisation
utilisé est celui de Levenberg-Marquardt [44], [45], [121] parfaitement adapté au cas des
fonctions non linéaires et multidimensionnelles. Le processus d’optimisation est résumé à la
figure 3.3. Pour un matériau orthotrope, il y a trois plans de symétrie et neuf constantes
élastiques indépendantes. Pour les composites unidirectionnels, ces plans sont typiquement

Annexes
229
P13, P23 et P12 comme le montre la figure 3.2 qui représente aussi les neuf constantes
élastiques indépendantes. Sept des neuf constantes élastiques indépendantes (C11, C22, C33,
C44, C55, C13, C23) peuvent être déterminées à partir des mesures des vitesses des ondes quasi-
longitudinales (QL) et des (QVC) dans deux plans de symétrie nommés P13 et P23. Pour
l’identification des deux constantes élastiques restantes, C12 et C66, les ondes QL et QVC se
propageant dans le troisième plan de symétrie (plan P12) or on a besoin de l’onde quasi-
horizontale de cisaillement (QHC) dans le plan P12. A cause de la petite épaisseur du
matériau, le plan P12 n’est pas accessible à la propagation, alors on requiert la propagation
dans un plan non principal, car dans un tel plan les trois modes (incluant les ondes QHC)
peuvent être extraits. Les plans optimaux de non-symétrie dans lesquels ces deux constantes
ont le plus d’influence sur les ondes transverses ultrasoniques sont ceux dont les directions
font un angle de 45° par rapport à la direction de symétrie du matériau (plan P45 à la figure
3.2) [2], [32], [78], [105]. Pour les composites qui montrent une isotropie transverse, les
mesures dans des plans de symétrie sont suffisantes pour déterminer l’ensemble des cinq
constantes élastiques indépendantes qui caractérisent le comportement élastique. Si l’axe 1 est
six fois axe de symétrie, ces deux plans de symétrie sont les plans P13 et P23. Les 5
constantes élastiques indépendantes sont C11, C22 = C33, C13 = C12, C23, and C55 = C66 avec la
relation de l’isotropie transverse: C44 = (C22-C23)/2.
Nouvelle matrice Cijkl
Calcul de vitesseVth(Ki,Cijkl, ρ)
Calcule deL’écart en vitesse
χ2Test duMinimum de l’écart ?
InitialisationC 0ijkl
(Première étape)
Vitesse ExperimentaleVexp
Matrice optimisée Cijkl(Etape finale)
(Première étape)
Figure 3.3 Détermination des constantes élastiques par processus d’optimisation
Evaluation de l’incertitude
L’aspect itératif du processus d’optimisation n’autorise pas une répartition classique des

Annexes
230
incertitudes associées au constantes élastiques optimisées. Nous utilisons alors une méthode
de Monte-Carlo [85] qui produit de nombreuses vitesses simulées avec une dispersion
aléatoire en relation avec les erreurs expérimentales (mesure de temps, position de l’angle,
…). Les constantes élastiques sont déterminées pour chaque simulation par l’ancien processus
d’optimisation et l’analyse statistique de toutes les simulations (près de 1000). Ceci nous
permet la détermination des incertitudes associées à chaque constante élastique.
Annexes
231
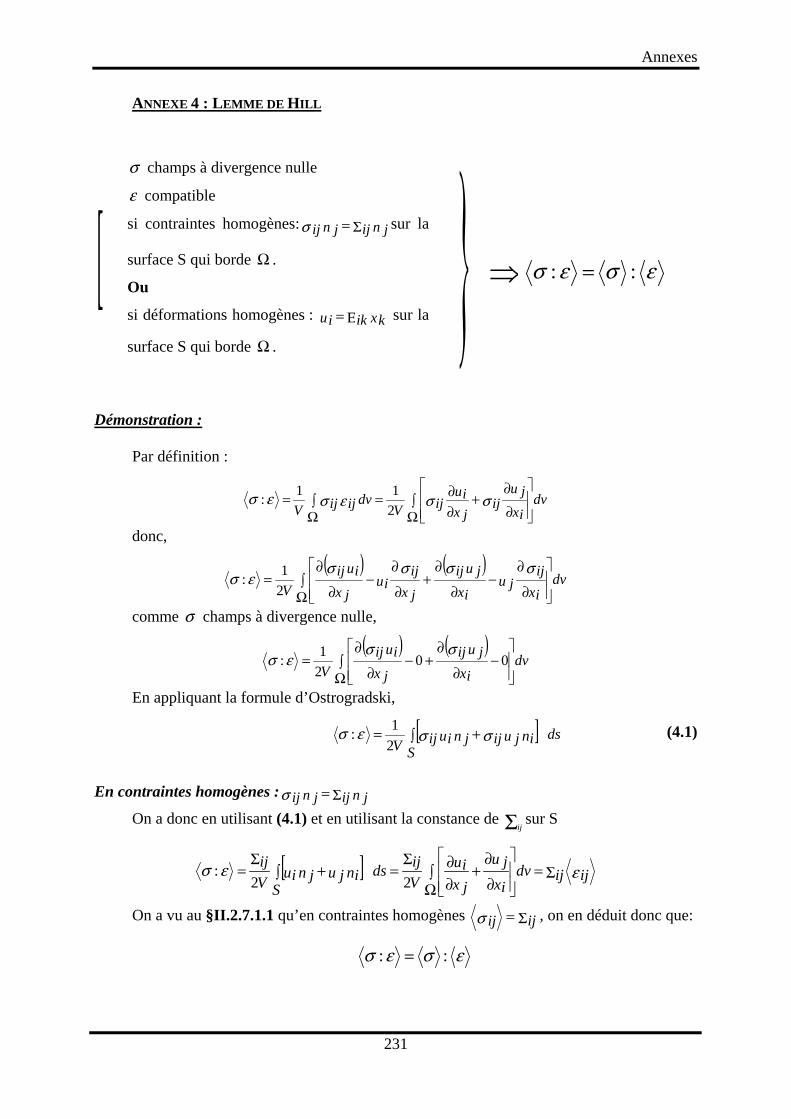
ANNEXE 4 : LEMME DE HILL
[
σ champs à divergence nulle
ε compatible
si contraintes homogènes: n jijn jij Σ=σ sur la
surface S qui borde Ω .
Ou
si déformations homogènes : xkikui Ε= sur la
surface S qui borde Ω .
⇒
εσεσ :: =
Démonstration :
Par définition :
∫Ω ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
∂
∂+
∂∂=∫
Ω= dv
xi
u jijx j
uiijV
dvijijV σσεσεσ211:
donc,
( ) ( )∫Ω ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
∂
∂−
∂
∂+
∂
∂−
∂
∂= dv
xi
iju jxi
u jijx j
ijuix j
uiijV
σσσσεσ
21:
comme σ champs à divergence nulle,
( ) ( )∫Ω ⎥
⎥⎦
⎤
⎢⎢⎣
⎡−
∂
∂+−
∂
∂= dv
xi
u jijx j
uiijV
0021:
σσεσ
En appliquant la formule d’Ostrogradski,
[ ]∫ +=S
dsniu jijn juiijV σσεσ21: (4.1)
En contraintes homogènes : n jijn jij Σ=σ
On a donc en utilisant (4.1) et en utilisant la constance de Σijsur S
[ ] εεσ ijijdvxi
u jx jui
Vij
Sdsniu jn juiV
ijΣ=∫
Ω ⎥⎥⎦
⎤
⎢⎢⎣
⎡
∂
∂+
∂∂Σ
=∫ +Σ
=22
:
On a vu au §II.2.7.1.1 qu’en contraintes homogènes Σ= ijijσ , on en déduit donc que:
εσεσ :: =

Annexes
232
En déformations homogènes : xkikui Ε= On a donc en utilisant (4.1),
[ ]∫ Ε+Ε=S
dsnixkjkijn jxkikijV σσεσ21:
en utilisant la linéarite de l’intégration, et la constance de Εij sur S,
[ ] [ ]⎥⎥
⎦
⎤
⎢⎢
⎣
⎡∫Ε+∫Ε=S
dsnixkijjkS
dsn jxkijikV σσεσ21:
en utilisant la formule d’Ostrogradski, on obtient:
( ) ( )⎥⎥⎦
⎤
⎢⎢⎣
⎡∫Ω ∂
∂Ε+∫
Ω ∂
∂Ε= dv
xi
xkijjkdv
x j
xkijikV
σσεσ
21:
comme σ champs à divergence nulle,
( ) ( )⎥⎥⎦
⎤
⎢⎢⎣
⎡∫Ω ∂
∂Ε+∫
Ω ∂
∂Ε= dv
xi
xkijjkdv
x j
xkijikV
σσεσ
21:
donc,
⎥⎥⎦
⎤
⎢⎢⎣
⎡∫Ω
Ε+∫Ω
Ε= dvkiijjkdvkjijikV δσδσεσ21:
On obtient finalement
σσεσ ijijdvijVij
V Ε=⎥⎥⎦
⎤
⎢⎢⎣
⎡∫Ω
Ε=
21:
On a vu au §II.2.7.1.2 qu’en déformations homogènes Ε= ijijε , on en déduit donc
que:
εσεσ :: =

Annexes
233
ANNEXE 5 : CALCUL DES PROPRIETES ELASTIQUES EFFECTIVES PAR FFT
Les méthodes de calculs numériques par éléments finis sont couramment employées
pour déterminer les distributions de champs de contraintes )(xσ et de déformations )(xε dans
un matériau hétérogène soumis à différents types de sollicitations. Cependant, à cause de la
nécessité de générer un maillage de la structure dans le cas de structures modérément
complexes, il est d'usage de réduire toute la richesse microstructurale d'un matériau en
étudiant des architectures obtenues à partir d'une cellule de base périodisée (la publication
[16] illustre cette méthodologie pour les composites à fibres). Essentiellement, il s'agit de
remplacer le caractère aléatoire d'une microstructure par son « équivalent » périodique. La
méthode développée par MOULINEC et SUQUET [106], [107] contourne cette difficulté en
proposant une approche directe du calcul des champs locaux qui incorpore comme donnée
brute une vue micrographique d'un milieu composite pour laquelle chaque pixel correspond à
une phase matérielle et donc à une loi de comportement spécifique (non nécessairement
élastique linéaire) . On résout alors dans l'espace de FOURIER l’équation (5.1) qui n’est pas
sans rappeler l'équation scalaire de Lipmann et Schwinger (1950) sur les fonctions d’onde.
')'(:)0)'((:)',(0)( dVxcxcxxEx εε −∫Ω
Γ−= (5.1)
L’équation (5.1) est l’équation intégrale formulant les problèmes d’élasticité hétérogène
à l’aide d’une fonction de Green : )',( xxOG , )(xε est le champ de déformation en x tel que
dVxV
E ∫Ω
= )(1 ε en fait l’inconnue que l’on recherche. )',(0 xxΓ est le tenseur de Green
périodique relatif à un milieu homogène de référence de modules d'élasticité C0 et qui est
fonction des dérivées partielles de )',( xxOG .
En définissant la transformée de Fourier d'un champ quelconque )(xA de l’espace réel
en un champ )(ˆ ξA de l’espace de Fourier, on a :
))(()(ˆ xATFA =ξ (5.2)
L’équation (5.1) s’écrit dans l’espace de Fourier :

Annexes
234
)))((:(:)(ˆ 0)(ˆ ξεδξξε xcTFΓ−= (5.3)
avec cxcc 0)( −=δ , on va ainsi pouvoir calculer en utilisant l’algorithme incrémental,
présenté en dessous, le champ de déformation inconnu )(xε à partir de la seule connaissance
du champ de déformation macroscopique E et de la connaissance des propriétés mécaniques
sur les différents voxels.
Algorithme de Calcul :
L'utilisation d'algorithmes de calcul par transformation de Fourier rapide ( « Fast
Fourier Transform » , FFT , calcul numérique sur une «grille» de données de longueur 2N
selon une direction) sur des ordinateurs à calcul parallèle augmente considérablement la
rapidité de résolution de l'équation (5.3). La procédure suivie pour la résolution du problème
est indiquée ci-dessous, le test de convergence signalant la fin du calcul au pas ifinal consiste à
vérifier la condition d'équilibre 0)]([ =xdiv σ .
Initialisation : i) 0=i , ,Vx ∈∀ Ex =)(0ε ii) 0=i , ,Vx ∈∀ )(:)()( 00 xxCx εσ = convergence ? iii) )(:)()( xxCx ii εσ = test de convergence 0)]([ =xdiv σ ? Itération 1+i avec passage dans l’espace de Fourier et retour :
iv) ))))((:)(0)((:)(ˆ 0)(1ˆ ξεσξξε xixCxiTFi −Γ−=+ 0≠∀ξ et Ei =+ )0(ˆ 1ε v) ))(ˆ()( 111 ξεε +−+ = ii TFx vi) retour à iii)
Le principal avantage de cette méthode est sa rapidité de calcul par rapport aux éléments
finis, son principal inconvénient est de ne pouvoir prendre en compte des structures
composites endommagées avec des vides des fissures et des cavités contrairement aux
éléments finis.

Annexes
235
ANNEXE 6 : SOUS ROUTINES GENEREES A L’AIDE DE MATLAB POUR LE CALCUL
TENSORIEL NUMERIQUE
1 - OBJECTIF:
l’objectif de ces routines est de faciliter les calculs tensoriels qui sont à la fois
simplifiés et complexifiés par la notation de Voigt.
Ici on saisit les tenseurs dans la notation qu’on désire et on fait les calculs sur les vrais
tenseurs (ordre 4 dimension 3)
2 - SAISIE DES TENSEURS
Saisie de tenseur d’ordre 2, dimension 3: a(i,j)
a=sss saisie d’un tenseur symétrique a
a=sns saisie d’un tenseur non symétrique a
Saisie de tenseur d’ordre 2, dimension 6: a(i,j) (notation de Voigt)
a=ssv saisie d’un tenseur symétrique a
a=snsv saisie d’un tenseur non symétrique a
Saisie de tenseur d’ordre 4, dimension 3: a(i,j,k,l)
a=ssvn saisie d’un tenseur symétrique en notation de voigt converti
directement en tenseur d’ordre 4 a
a=si saisie d’un tenseur de comportement isotrope a
a=so saisie d’un tenseur de comportement orthotrope a
a=auto_si(E,v)calcul du tenseur a de comportement isotrope déterminé à l’aide
du module d’Young et du coefficient de poisson
a=auto_so(E1,E2,E3,v12,v23,v13,G12,G23,G31)
calcul du tenseur a de comportement orthotrope déterminé à l’aide des
différents modules.
3 - OPERATEUR SUR TENSEURS Définition de tenseur particulier
a=id a devient le tenseur identité I d’ordre 4, de dimension 3.
a=mk a devient le tenseur K d’ordre 4, de dimension 3 tel que pour un
comportement isotrope: C=3λK+2µI
a=spesh(vm) a est le tenseur d’Eshelby d’ordre 4 pour une inclusion
sphérique,
le coefficient de Poisson matrice vaut vm

Annexes
236
a=fiesh(vm) a est le tenseur d’Eshelby d’ordre 4 pour une fibre de section
cylindrique, le coefficient de poisson matrice vaut vm
a=elesh(a1,a3,vm) a est le tenseur d’Eshelby d’ordre 4 pour une inclusion
ellipsoidale de grand axe 3 (prolate spheroide a3>a1=a2), le coefficient de
poisson matrice vaut vm
Conversion de tenseurs a=cnv(b) on convertit le tenseur b d’ordre 4, de dimension 3, en un
tenseur a d’ordre 2, de dimension 3 (notation de voigt)
a=cvn(b) on convertit le tenseur b d’ordre 2, de dimension 3 (notation de
voigt) en un tenseur a d’ordre 4, de dimension 3
Opérations sur tenseurs a=b’ a est le tenseur transposé du tenseur b d’ordre 2 (dimension
quelconque)
a=tran(b) a est le tenseur transposé du tenseur b d’ordre 4 dimension 3
a=inv(b) a est l’inverse du tenseur b d’ordre 2 (dimension quelconque)
a=inver(b) a est l’inverse du tenseur b d’ordre 4 dimension 3
a=b+c a est la somme des tenseur b et c
a=b-c a est la soustraction du tenseur b au tenseur c
a=b*c a est le produit matriciel de deux tenseurs d’ordre 2, b et c
(dimension quelconque)
a=b.*c a est le produit terme à terme de deux tenseurs b et c (d’ordre
qqc, de dimension qqc)
a=mulc(b,c) a est le produit d’un tenseur d’ordre 4 de dimension 3, b, par un
tenseur d’ordre 2 de dimension 3, c
a=mult(b,c) a est le produit de deux tenseurs d’ordre 4 de dimension 3, b et c
Qualification de tenseurs
q=depos(c) q=1 si c est un tenseur d’ordre 2 (6x6) de complaisance défini
positif, sinon q=0
4 - EXTRACTION DE VALEURS SUR LES TENSEURS Extraction de modules
a=emo(b) a sort les modules d’élasticité orthotrope du tenseur b
d’ordre 4, de dimension 3.
Annexes
237
ANNEXE 7 : ESTIMATION DES PROPRIETES EFFECTIVES D’UN AL/SIC FISSURE
AVEC CALCUL ELASTO PLASTIQUE
1 - INTRODUCTION
Dans les matériaux à matrice métallique, les matériaux n’ont que très rarement un
comportement mécanique élastique. Plus souvent on se retrouve en présence de matériaux
plastiques ou élasto-plastique. Ce comportement combiné à un endommagement particulaire
de type fissure inclusionnaire conduit à une dissymétrie du comportement en traction et en
compression. C’est ce que nous avons essayé de modéliser dans cette étude purement
numérique d’une inclusion apparentée à du SiC fissurée et décollée selon le plan équatorial et
enrobée par une matrice apparentée à de l’aluminium.
2 - MATERIAUX ET MODELE
En ce qui concerne le matériau de l’inclusion, nous avons pris un SiC (Carbure de
Silicium) un peu plus rigide que dans la littérature [4], puisque dans celle-ci, les valeurs
données sont de 420 GPa. Les valeurs que nous avons prises sont consignés dans le tableau
7.4.
Propriétés mécaniques
E(MPa)
ν
SiC
500.000
0.235
Tableau 7.4 propriétés élastique du SiC
Nous avons également sélectionné un matériau élasto plastique pour la matrice qui n’est
pas sans rappeler l’aluminium. En effet dans la littérature [42], on trouve pour un aluminium
(%Al >99.6) les propriétés mécaniques inscrites dans le tableau 7.5.
Propriétés
mécaniques
E(MPa)
ν
Re0.2(MPa)
Rm(MPa)
A%
Aluminium (%Al>99.6)
70.000
0.3
28
70
40
Tableau 7.5 propriétés élastiques de l’aluminium %AL>99.6

Annexes
238
Le modèle utilisé est un modèle élasto-plastique de Von Mises à écrouissage isotrope. Pour des raisons de convergence, nous avons dû couvrir une plage de déformation plus importante. Nous avons choisi arbitrairement A%=400%. Un autre choix peut être plus judicieux aurait pu être de prolonger la courbe réelle de traction jusqu'à atteindre une déformation limite de 400%. Cependant nous n’avions pas d’essais expérimentaux à mettre en face nous avons donc choisi des lois de comportement mécanique proche mais non identique à l’aluminium et au SiC. On peut comparer les courbes de traction simulées respectives de ces deux matériaux virtuels à la figure 7.6.
Figure 7.6 Courbes de traction partielle des matériaux modèles virtuels
3 - MODELISATION MATERIAU SAIN
Nous avons dans cette étude considéré deux fractions volumiques. Nous avons généré
les maillages représentés à la figure 7.1 en suivant la technique exposée aux §II.2.2 à §II.2.5.
Cette fois ci, comme nous sommes en élasto-plasticité, nous utilisons des triangles à 6 nœuds
permettant de générer des maillages volumiques composés de te10, tétraèdre à 10 nœuds,
avec une fonction d’interpolation de degré 2 et à 5 points d’intégration [49]. Les champs de
déformations élasto-plastiques étant plus complexes, la convergence sera d’autant plus facile
à réaliser avec un polynôme de degrés 2 [157].
Fv de SiC=6.47% Fv de SiC=19.3%
Figure 7.1 Maillage de AL/SiC fissuré avec 55,7% de décohésion
Annexes
239
Ensuite on a imposé un arrêt en translation suivant Z sur le bas de la cellule. On a
imposé sur une des deux faces normales à X , un arrêt en translation selon X tandis que
l’autre face normale à X était libre de se déformer selon un mouvement d’ensemble de bloc
rigide toujours selon X . On a imposé sur une des deux faces normales à Y , un arrêt en
translation selon Y tandis que l’autre face normale à Y était libre de se déformer selon un
mouvement d’ensemble de bloc rigide selon Y . Puis on fait un chargement incrémental sur
Z sur la face supérieur de la cellule et on calcule la somme des résultantes des champs
d’effort suivant Z sur la surface supérieure. On peut donc tracer une courbe de traction
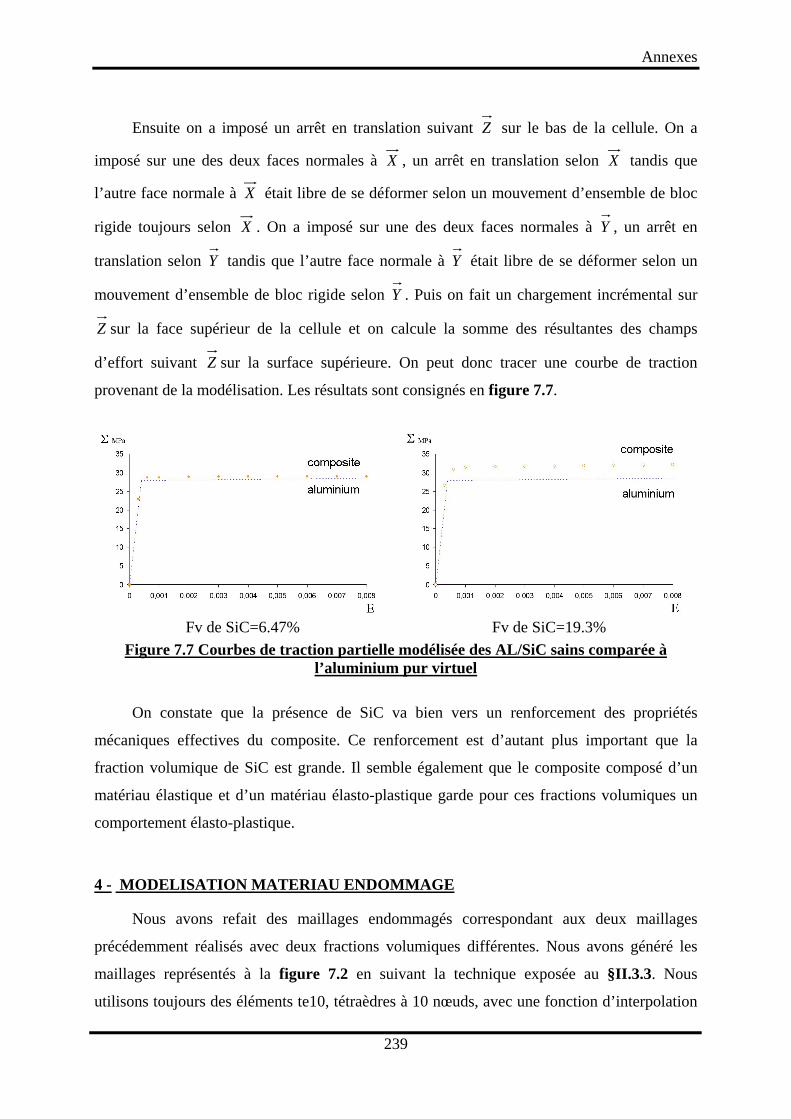
provenant de la modélisation. Les résultats sont consignés en figure 7.7.
Fv de SiC=6.47% Fv de SiC=19.3% Figure 7.7 Courbes de traction partielle modélisée des AL/SiC sains comparée à
l’aluminium pur virtuel
On constate que la présence de SiC va bien vers un renforcement des propriétés
mécaniques effectives du composite. Ce renforcement est d’autant plus important que la
fraction volumique de SiC est grande. Il semble également que le composite composé d’un
matériau élastique et d’un matériau élasto-plastique garde pour ces fractions volumiques un
comportement élasto-plastique.
4 - MODELISATION MATERIAU ENDOMMAGE
Nous avons refait des maillages endommagés correspondant aux deux maillages
précédemment réalisés avec deux fractions volumiques différentes. Nous avons généré les
maillages représentés à la figure 7.2 en suivant la technique exposée au §II.3.3. Nous
utilisons toujours des éléments te10, tétraèdres à 10 nœuds, avec une fonction d’interpolation

Annexes
240
de degré 2 et à 5 points d’intégration [49] pour les mêmes raisons que précédemment. Les
champs de déformations élasto-plastiques étant plus complexes, la convergence sera d’autant
plus facile à réaliser avec un polynôme de degré 2 [157]. On a également rajouté un maillage
de contact entre les 2 faces de la fissure comme défini dans le §II.3.4.1.
Fv de SiC=6.47% Fv de SiC=19.3% Figure 7.2 Maillage de AL/SiC fissuré avec 55,7% de décohésion
Ensuite on a imposé un arrêt en translation suivant Z sur le bas de la cellule. On a
imposé sur une des deux faces normales à X , un arrêt en translation selon X tandis que
l’autre face normale à X était libre de se déformer selon un mouvement d’ensemble de bloc
rigide toujours selon X . On a imposé sur une des deux faces normales à Y , un arrêt en
translation selon Y tandis que l’autre face normale à Y était libre de se déformer selon un
mouvement d’ensemble de bloc rigide selon Y .
Puis on fait un chargement incrémental sur Z sur la face supérieure de la cellule et on
calcule la somme des résultantes des champs d’effort suivant Z sur la surface supérieure. On
peut donc tracer une courbe de traction provenant de la modélisation. Les résultats sont

Annexes
241
consignés en figure 7.8.
Fv de SiC=6.47% Fv de SiC=19.3% Figure 7.8 Courbes de traction partielle modélisée des AL/SiC fissurés comparée à
l’aluminium pur virtuel
On constate tout d’abord que les comportements en compression de l’Al/SiC fissuré est
très similaire à celui relevé sur la figure 7.7 et qui concernait une inclusion saine. On voit que
dans le cas ou la fraction volumique de la phase dure est importante il y a bien une importante
dissymétrie dans le comportement, vu qu’en traction le comportement du composite est
beaucoup moins rigide qu’en compression. On constate également que si la fraction
volumique de la phase rigide est faible, on va vers une réduction de la dissymétrie du
comportement, on se retrouve alors très proche d’un matériau sans phase dure…
5 - CRITIQUES DU MODELE
Contrairement à la plupart des modélisations présentées dans cette thèse, ces derniers
calculs sont assez dépendants des champs locaux dans les éléments qui vont piloter
l’écoulement élasto plastique. Or il se peut que malgré le soin accordé au choix des éléments,
ceux-ci ne soient pas assez raffinés dans les endroits où se produisent de fortes concentrations
de contrainte conduisant à de forts écoulements élasto plastique.
En effet rappelons que dans les autres calculs §II.2.7.2.5, nous n’avions besoin que du
champ moyen par élément et que même si celui-ci était légèrement erroné, sur certains
éléments localisés, il est moyenné sur des structures comportant quelques 10000 éléments,
permettant ainsi de réduire drastiquement les erreurs aux points singuliers.
De plus en s’écoulant plastiquement, la matrice élasto plastique va frotter, voire peut
être s’abraser sur les interfaces de l’inclusion fissurée et nous n’avons pas introduit de loi de
frottement aux interfaces.
Annexes
242
Pour toutes ces raisons, et parce que nous avons introduit les éléments prépondérants et
nécessaires (contact-fissure-décohésion-maillage 3D-…), mais non pas suffisants, les résultats
de cette étude ne peuvent être analysés que de manière qualitative et non pas quantitative.
Par ailleurs il semble difficile de faire une comparaison expérimentale. Il faudrait en
effet fournir une éprouvette avec 6,47% de particules fissurées toutes dans le plan médian…
6 - CONCLUSION
Les résultats de cette étude sont qualitativement intéressants. Ils montrent que
l’adjonction de particules dures dans de faibles proportions dans une matrice élasto-plastique
renforce bien les propriétés d’un composite qui reste élasto-plastique. Que plus on a une
fraction volumique importante d’inclusions plus le comportement mécanique est renforcé
quand celles-ci sont saines mais il y a une prise de risque. En effet le composite risquera
d’être affaibli si celles-ci s’endommagent par fissuration, le problème n’étant pas perçu en
compression lorsque la fissure se referme mais en traction lorsque celles-ci s’ouvrent
permettant à la matrice élasto plastique de s’écouler le long des interfaces décollées.


















