Les enfants de la patrie - Volet 1 "Vive la Patrie ! " (1871-1914) - Horreurs guerres - version corr
Upload
stephane-durel-mbidaCategory
view
216download
3description

DIMENSIONNEMENT DE RÉGULATEURS
Corrigés d’exercices pour la section 8.4 1 J.-M. Allenbach 2001.03.09
E 8.4.31 Un système à régler (S) est connu par sa fonction de transfert:
G ss s ss ( )
( , ) ( , ) ( , )=
+ + +10
1 0 1 1 0 05 1 0 004
Performances requises pour la réponse indicielle du système global (G) par rapport à la consigne (w): • dépassement maximal inférieur à 5%. • temps de réponse à 5% inférieur à 17 [ms]. • écart statique nul. A Calculer le régulateur (R) par la méthode d'imposition des pôles dominants en boucle fermée. Donner le résultat sous forme de quotient de polynômes en s factorisés. Conseil pour le calcul avec tracé géométrique explicite: choisir une échelle de 1 [s–1] := 1 [mm] sur feuille A4 au format "à l'italienne" (paysage). B Refaire le point A à l’aide du programme MATLAB\Regupole\regupole.m. C Imprimer le comportement dynamique du système en boucle fermée à l’aide de MATLAB\ Regupole\papier.m. C 8.4.31 A Cahier des charges: D1 ≈ 5 % => Ψ = 45° ; tr ≈ 17 [ms] => –ρ = –123,5 (dessinés sur le diagramme) ; e∞ = 0 => régulateur à composant intégrale (pôle 0). On en déduit les pôles dominants souhaités pour la boucle fermée : pf1,f2 = –123,5±123,5j (2 pts) On exprime la fonction de transfert sous forme d’Evans pour mettre en évidence pôles, zéros et facteur d’Evans.
G ss s ss ( )
( )( )( )=
+ + +510
10 20 250
5
pôles = [–10 –20 –250] zéros = [] ks = 5 105 (1 pts) On détermine les zéros par la condition des angles :
α αn v+ = °+ °+ °+ °+ °= °= °180 135 133 130 45 623 263 choix arbitraire : αn = °133 pour compenser le premier pôle négatif =>αv = °130 On lit sur le diagramme : zn = –10 et zv = –20 => Tn = 100 et Tv = 50 [ms] (3 pts) On applique la condition des modules :
k0 = =174 166 159 177
166 15930798 => T T T
kki n v
s -65
105 10
ms= = =0
500030798
81[ ] (3 pts)
G ss s
sR ( )( )( )
=+ +− −
−1 100 10 1 50 10
81 10
3 3
3 (1 pts)
Temps étudiants 45’ TOTAL 10 pts
w S
v
y ucm +
–
R
G

DIMENSIONNEMENT DE RÉGULATEURS
Corrigés d’exercices pour la section 8.4 2 J.-M. Allenbach 2001.03.09
C 8.4.31 B (suite)

DIMENSIONNEMENT DE RÉGULATEURS
Corrigés d’exercices pour la section 8.4 3 J.-M. Allenbach 2001.03.09
C 8.4.31 B En appliquant le programme, on obtient le système à régler sous forme canonique. Transfer function: 5e005
------------------------------ s^3 + 280 s^2 + 7700 s + 50000
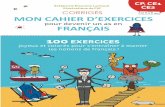
Le logiciel calcule le pôle dominant en boucle fermée en fonction du cahier des charges qu'on a introduit.
On vous propose d'imposer le pole suivant en boucle fermee: P1bf = -123.5294+129.544i
Le logiciel propose un choix de zéros et pôles du régulateur.
-250 -200 -150 -100 -50 0
0
20
40
60
80
100
120
Lieu d'Evans
Gr= Zero/pole/gain: 312.3978 (s+16.82) (s+10) ------------------------- s (s+5000)
Le logiciel invite l'utilisateur à confirmer le gain proposé. On peut l'écrire sous forme de Bode.
G ss s
s sR ( )
( )( , )
( )=
+ +
+
− −
− −1 100 10 1 59 5 10
95 10 1 200 10
3 3
3 6
On obtient environ le même régulateur qu'avec la méthode manuelle. Le pôle supplémentaire est destiné à rendre causal le régulateur PID. Il reste à vérifier le comportement dynamique.

DIMENSIONNEMENT DE RÉGULATEURS
Corrigés d’exercices pour la section 8.4 4 J.-M. Allenbach 2001.03.09
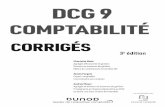
C 8.4.31 C Résultat de la simulation
0 0.02 0.04 0.06 0.08 0.10
0.2
0.4
0.6
0.8
1
1.2
1.4
D1
Tr
Réponse à un saut de consigne
Dépassement maximal: D1= 2.845 [%]; temps de réponse: Tr= 0.017438[s] Le cahier des charges est assez presque respecté. On augmente légèrement le gain à 350 en profitant du fait que le dépassement est nettement inférieur à 5 %.
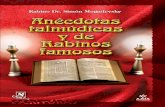
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.090
0.2
0.4
0.6
0.8
1
1.2
1.4
D1
Tr
Réponse à un saut de consigne
Dépassement maximal: D1= 4.7765 [%];Temps de réponse: Tr= 0.015335[s]
Cette fois la réponse indicielle est complètement dans le gabarit.

DIMENSIONNEMENT DE RÉGULATEURS
Corrigés d’exercices pour la section 8.4 5 J.-M. Allenbach 2001.03.09
-160 -140 -120 -100 -80 -60 -40 -20 0 20
-150
-100
-50
0
50
100
150
Lieu de pôles