Bompart Vincent
166
Universit´ e Paul Sabatier – Toulouse III U.F.R. ´ Ecole Doctorale Math´ ematiques, Informatique Math´ ematiques, Informatique et Gestion et T´ el´ ecommunications de Toulouse Optimisation non lisse pour la commande des syst` emes de l’A´ eronautique TH ` ESE pr´ esent´ ee et soutenue publiquement le 23 novembre 2007 pour l’obtention du Doctorat de l’Universit´ e Paul Sabatier – Toulouse III (sp´ ecialit´ e Math´ ematiques appliqu´ ees et Automatique) par Vincent BOMPART Composition du jury Rapporteurs : M. Samir ADLY Universit´ e de Limoges M. Pierre-Alexandre BLIMAN INRIA Rocquencourt Examinateurs : M. Paul ARMAND Universit´ e de Limoges M. Jean-Philippe HARCAUT MBDA France M. Jean-Baptiste HIRIART-URRUTY Universit´ e Paul Sabatier Toulouse III Directeurs : M. Pierre APKARIAN ONERA Centre de Toulouse M. Dominikus NOLL Universit´ e Paul Sabatier Toulouse III Institut de Math´ ematiques de Toulouse — UMR CNRS 5219 Equipe Math´ ematiques pour l’Industrie et la Physique
-
Upload
kawther-ben -
Category
Documents
-
view
20 -
download
1
Transcript of Bompart Vincent

Universite Paul Sabatier – Toulouse III
U.F.R. Ecole DoctoraleMathematiques, Informatique Mathematiques, Informatiqueet Gestion et Telecommunications de Toulouse
Optimisation non lisse pour lacommande
des systemes de l’Aeronautique
THESE
presentee et soutenue publiquement le 23 novembre 2007
pour l’obtention du
Doctorat de l’Universite Paul Sabatier – Toulouse III
(specialite Mathematiques appliquees et Automatique)
par
Vincent BOMPART
Composition du jury
Rapporteurs : M. Samir ADLY Universite de LimogesM. Pierre-Alexandre BLIMAN INRIA Rocquencourt
Examinateurs : M. Paul ARMAND Universite de LimogesM. Jean-Philippe HARCAUT MBDA FranceM. Jean-Baptiste HIRIART-URRUTY Universite Paul Sabatier
Toulouse III
Directeurs : M. Pierre APKARIAN ONERA Centre de ToulouseM. Dominikus NOLL Universite Paul Sabatier
Toulouse III
Institut de Mathematiques de Toulouse — UMR CNRS 5219Equipe Mathematiques pour l’Industrie et la Physique

Mise en page LATEX basée sur la classe thloria.

i
RemerciementsMes premiers remerciements s’adressent à Pierre Apkarian et à Dominikus Noll, tous
deux à l’origine de cette thèse et qui l’ont dirigée conjointement durant ces trois années ;j’ai pu bénéficier de leur expertise scientifique et de leurs éclairages complémentaires, maiségalement de leur écoute et de leur gentillesse.
Je remercie les rapporteurs, Samir Adly et Pierre-Alexandre Bliman : ils ont acceptéde prendre connaissance de mon travail de façon approfondie, malgré les délais réduitsdont ils disposaient, et leurs remarques précises ont permis d’améliorer la qualité de cedocument. Merci également aux autres membres du jury, Paul Armand, Jean-PhilippeHarcaut et Jean-Baptiste Hiriart-Urruty, qui ont bien voulu se rendre disponibles pourjuger mon travail.
J’ai pu bénéficier pendant toute la thèse de l’environnement scientifique et humain del’ONERA, ainsi que de son soutien financier. J’ai été accueilli au département de com-mande des systèmes et dynamique du vol (DCSD), à Toulouse, dont je souhaite remerciertout particulièrement le directeur, Patrick Fabiani, qui a su me donner les moyens demener à bien cette thèse, ainsi que Philippe Mouyon, responsable de l’unité de recherchecommande et intégration (UR CDIN). Merci également aux ingénieurs de recherche dudépartement (et en particulier à Pierre Vacher, Michel Corrège, et . . .Catherine Tessierpour ses éclats de rire communicatifs). Je n’oublie pas les membres du groupe de travailOptimisation et Interactions, au sein de l’équipe MIP de l’Institut de Mathématiques deToulouse.
Merci aux doctorants du DCSD : Jean-Baptiste, dont j’ai partagé le bureau pen-dant la première année, et qui m’a “passé le relais” et encouragé. Bureau que j’ai à montour partagé avec Patrice qui, j’en suis sûr, trouvera vite un remplaçant pour échangerses réflexions scientifiques ou philosophiques toujours passionnantes. Merci aussi, dans ledésordre, à Sophie, Damien, Greg et Greg, Manu, Nico, Florian, Andreas, Alex, Julien,Sylvain B., Clément, Alberto, et aux “anciens” thésards, Charles, Olivier, Cédric, Florent,Sylvain D., Sebastian, Fabien et Elodie. Encore des remerciements pour Olivier et Audede l’équipe MIP.
La thèse est un investissement personnel de chaque instant, qui passe par des douteset des remises en question parfois trop lourds à porter seul ; mes parents ont su m’écou-ter, me parler et me soutenir dans ces moments délicats, et je désire ici leur témoignerma profonde reconnaissance. Merci également à David pour ses encouragements constants.
Un dernier petit mot et une pensée, enfin, pour ma grand-mère, Marie-Louise, qui s’enest allée alors que je rédigeais ma thèse.

ii

Table des matières
Introduction 3
I Notions fondamentales et cadre de travail 9
1 Introduction à la commande des systèmes 111.1 Terminologie et définitions . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.1.1 Systèmes dynamiques . . . . . . . . . . . . . . . . . . . . . . . 111.1.2 Normes de signaux . . . . . . . . . . . . . . . . . . . . . . . . . 161.1.3 Stabilité des systèmes linéaires . . . . . . . . . . . . . . . . . . 161.1.4 Normes de systèmes . . . . . . . . . . . . . . . . . . . . . . . . 18
1.2 Problèmes de synthèse pour la commande . . . . . . . . . . . . . . . . 191.2.1 Forme standard pour la commande . . . . . . . . . . . . . . . . 201.2.2 Stabilisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231.2.3 Synthèse H∞ . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2 Optimisation non lisse 332.1 Terminologie et définitions . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.1.1 Ingrédients pour l’analyse non lisse . . . . . . . . . . . . . . . . 332.1.2 Analyse non lisse : le cas convexe . . . . . . . . . . . . . . . . . 362.1.3 Analyse non lisse : le cas lipschitizien . . . . . . . . . . . . . . . 38
2.2 Conditions d’optimalité . . . . . . . . . . . . . . . . . . . . . . . . . . 422.3 Algorithmes pour l’optimisation non lisse . . . . . . . . . . . . . . . . . 43
2.3.1 Direction de descente . . . . . . . . . . . . . . . . . . . . . . . . 432.3.2 Méthodes de faisceaux . . . . . . . . . . . . . . . . . . . . . . . 452.3.3 Méthodes pour les problèmes minimax . . . . . . . . . . . . . . 47
iii

iv Table des matières
II Algorithmes développés et applications 55
3 Techniques non lisses pour la stabilisation des systèmes linéaires 573.1 Introduction and notations . . . . . . . . . . . . . . . . . . . . . . . . . 593.2 Minimizing the spectral abscissa . . . . . . . . . . . . . . . . . . . . . . 613.3 Subgradients of the spectral abscissa . . . . . . . . . . . . . . . . . . . 62
3.3.1 Subgradients in state-space . . . . . . . . . . . . . . . . . . . . 623.3.2 Subgradients and dynamic controllers . . . . . . . . . . . . . . . 643.3.3 Subgradients with structured controllers . . . . . . . . . . . . . 64
3.4 Descent step and optimality function . . . . . . . . . . . . . . . . . . . 653.5 Nonsmooth descent algorithms . . . . . . . . . . . . . . . . . . . . . . 66
3.5.1 Variant I (first-order type) . . . . . . . . . . . . . . . . . . . . . 663.5.2 Variant II (second-order type) . . . . . . . . . . . . . . . . . . . 68
3.6 Numerical examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . 693.6.1 Academic test . . . . . . . . . . . . . . . . . . . . . . . . . . . . 713.6.2 Transport airplane . . . . . . . . . . . . . . . . . . . . . . . . . 743.6.3 VTOL helicopter . . . . . . . . . . . . . . . . . . . . . . . . . . 773.6.4 B-767 airplane . . . . . . . . . . . . . . . . . . . . . . . . . . . 783.6.5 PID controllers . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
4 Optimisation non lisse pour la commande structurée 814.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 844.2 Nonsmooth H∞ design technique . . . . . . . . . . . . . . . . . . . . . 85
4.2.1 Subdifferential of the H∞ map . . . . . . . . . . . . . . . . . . 864.2.2 Structured controllers . . . . . . . . . . . . . . . . . . . . . . . 874.2.3 PID controllers . . . . . . . . . . . . . . . . . . . . . . . . . . . 884.2.4 Setpoint filter design . . . . . . . . . . . . . . . . . . . . . . . 904.2.5 Nonsmooth descent method . . . . . . . . . . . . . . . . . . . . 91
4.3 Nonsmooth loop-shaping design . . . . . . . . . . . . . . . . . . . . . . 944.3.1 Loop-shaping design . . . . . . . . . . . . . . . . . . . . . . . . 944.3.2 PID Loop-shaping design . . . . . . . . . . . . . . . . . . . . . 95
4.4 Application to a separating tower . . . . . . . . . . . . . . . . . . . . 964.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101

v
5 Commande temporelle et fréquentielle par techniques non lisses 1035.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1055.2 Time- and frequency domain designs . . . . . . . . . . . . . . . . . . . 1075.3 Nonsmooth descent method . . . . . . . . . . . . . . . . . . . . . . . . 109
5.3.1 Nonsmooth properties . . . . . . . . . . . . . . . . . . . . . . . 1115.4 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
5.4.1 Application to observer-based controller design . . . . . . . . . 1155.4.2 Application to reliable control . . . . . . . . . . . . . . . . . . 1165.4.3 Application to PID time response shaping . . . . . . . . . . . . 121
5.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
6 Optimisation non lisse du second ordre pour la synthèse H∞ 1256.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1276.2 Problem setting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1286.3 Approach via semi-infinite programming . . . . . . . . . . . . . . . . . 1296.4 Solving with SQP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
6.4.1 Quadratic tangent subproblem . . . . . . . . . . . . . . . . . . 1326.4.2 First and second derivative formulas . . . . . . . . . . . . . . . 1346.4.3 Multiple eigenvalues . . . . . . . . . . . . . . . . . . . . . . . . 1366.4.4 Globalisation via trust-region . . . . . . . . . . . . . . . . . . . 138
6.5 Technical aspects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1406.5.1 Identifying peak frequencies . . . . . . . . . . . . . . . . . . . . 1406.5.2 Stopping criteria . . . . . . . . . . . . . . . . . . . . . . . . . . 141
6.6 Numerical results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1426.7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
Conclusion 147
Bibliographie 149

vi Table des matières

1
Notations et symbolesNotation Signification
, Egal à, par définition∅ Ensemble videR, C Corps des nombres réels, des nombres complexesRe z, Im z Partie réelle, partie imaginaire de z ∈ C|x|, |z| Valeur absolue de x ∈ R, module de z ∈ CR+ Ensemble des nombre réels positifs ou nulsx+ Partie positive de x ∈ C
x+ , max x, 0C−, C+ Demi-plan ouvert gauche, droitRn, Cn Espace des vecteurs réels, complexes à n composantesRp×m Espace vectoriel des matrices réelles de taille p×m,
soit à p lignes et m colonnesGLn(R) Groupe linéaire des matrices carrées inversibles de taille n×nSn(R) Sous-espace vectoriel des matrices symétriques réelles de taille
n× nIn, I Matrice identité (de taille n, de taille fonction du contexte)X 0, X ≺ 0 X ∈ Sn(R) est définie positive, définie négativeX 0, X 0 X ∈ Sn(R) est semi-définie positive, semi-définie négativeTrX Trace de la matrice X ∈ Cn×nvecX Vectorisé (par colonnes) de X ∈ Rp×mXT Matrice transposée de X ∈ Rp×mXH Matrice adjointe de X ∈ Cp×mX−1 Matrice inverse de X ∈ Cn×nX+ Pseudo-inverse (ou inverse de Moore-Penrose) de X ∈ Cp×mX
12 Racine carrée de la matrice X 0〈x, y〉 Produit scalaire euclidien (hermitien) sur Rn (Cn)
〈x, y〉 , xHy〈〈X,Y 〉〉 Produit scalaire euclidien (hermitien) sur Rp×m (Cp×m)
〈〈X, Y 〉〉 , Tr (XHY )‖x‖∞ Norme infini du vecteur x ∈ Rn (x ∈ Cn)
‖x‖∞ , max1≤i≤n |xi|‖x‖2 ou ‖x‖ Norme euclidienne (hermitienne) du vecteur x ∈ Rn (x ∈ Cn)
‖x‖2 ,√xHx
B(x, r) Boule de centre x ∈ Rn et de rayon r ∈ R+ pour la normeeuclidienneB(X, r) , y ∈ Rn : ‖y − x‖ < r

2 Table des matières
Notation Signification
‖X‖F ou ‖X‖ Norme hermitienne (ou de Fröbenius) de la matriceX ∈ Cp×m‖X‖F ,
√Tr (XHX)
‖X‖2 Norme 2 de la matrice X ∈ Cp×m‖X‖2 , σ(X)
u(t) ou u Signal causal réel à temps continu u : t ∈ R+ 7→ u(t) ∈ RmU(s) ou U Transformée de Laplace du signal u
U(s) , ∫+∞0 u(t)e−st dt pour tout s ∈ C tel que Re s ≥ x0
‖u‖∞ Norme infini (valeur de crête) du signal u‖u‖2 Norme L2 (énergie) du signal u ∈ L2(R+)‖U‖2 Norme L2 ou, suivant le contexte, norme H2‖U‖∞ Norme H∞Λ(X), Λε(X) Spectre, pseudo-spectre de la matrice X ∈ Cn×nλi(X), 1 ≤ i ≤ n Valeurs propres de la matrice X ∈ Cn×nµi(X), 1 ≤ i ≤ q Valeurs propres (sans répétitions) de la matrice X ∈ Cn×nα(X), αε(X) Abscisse spectrale, pseudo-spectrale de la matrice X ∈ Cn×nβ(X) Distance à l’instabilité de la matrice X ∈ Cn×nρ(X) Rayon spectral de la matrice X ∈ Cn×n
ρ(X) , maxi |λi(M)|σi(X), 1 ≤ i ≤ min(m, p) Valeurs singulières (en ordre décroissant) de la matrice X ∈
Cp×mσ(X) ou σ1(X) Plus grande valeur singulière de la matrice X ∈ Cp×mf : Rn → R Fonction f définie sur Rn, à valeurs réelles[a, b] Segment d’extrémités a, b ∈ Rn
[a, b] , x ∈ Rn : il existe t, 0 ≤ t ≤ 1 et x = ta+ (1− t)bcoS Enveloppe convexe de S ⊂ RnminS, max S Minimum (plus petit élément), maximum (plus grand élé-
ment) d’un ensemble non vide S ⊂ R (s’ils existent)minx∈E f(x), maxx∈E f(x) Valeur minimum, maximum de f sur E (si elle en admet), ou,
suivant le contexte, problème de minimisation, de maximisa-tion (locale ou globale) de f sur E
arg minx∈E f(x), Un minimum, un maximum x ∈ E de f (s’il en existe)arg maxx∈E f(x)f ′(x) Différentielle de f en x ∈ Rnf ′x(x, t) Différentielle partielle de f par rapport à xf ′(x, d) Dérivée directionnelle de f en x ∈ Rn, dans la direction d ∈ Rnf (x, d) Dérivée directionnelle généralisée de f en x ∈ Rn, dans la
direction d ∈ Rn∂cf(x) Sous-différentiel de f en x ∈ Rn, en analyse convexe∂f(x) Sous-différentiel de Clarke de f en x ∈ Rn

Introduction
Les processus industriels présentent une complexité grandissante, qu’il s’agisse d’unitésde production (réacteurs chimiques, centrales électriques), de moyens de transport (avionscivils ou militaires, hélicoptères), ou autres. Ils résultent fréquemment de l’interconnexionde plusieurs sous-systèmes mis en réseau. Ils intègrent des fonctionnalités en plus grandnombre qu’auparavant, et doivent satisfaire des cahiers des charges plus contraignants :satisfaction de contraintes de qualité ou de sécurité, respect de normes environnementales(bruit, pollution)... Le respect de ces spécifications passe par la conception d’un systèmede commande, dont l’action sur le processus lui confère les propriétés souhaitées.
Ces processus sont par ailleurs de mieux en mieux modélisés : les techniques d’iden-tification sont plus performantes et peuvent intégrer de plus grands volumes de donnéesexpérimentales. Les moyens de simulation de ces modèles suivent l’accroissement de leurcomplexité.
Ainsi, les méthodes de conception de commande dites classiques, basées sur des tech-niques fréquentielles, essentiellement graphiques, parfois empiriques, ne sont plus adap-tées. La formulation des objectifs de commande sous la forme d’un problème d’optimisa-tion (commande LQ, LQG, H2, H∞), à la base de l’Automatique moderne, a permis demieux appréhender la commande des systèmes complexes. Les lois de commande optimaless’expriment alors comme des solutions d’équations algébriques (équations de Lyapunov,de Riccati), ou de problèmes de minimisation sous des contraintes matricielles de positi-vité. Les inégalités linéaires matricielles (ou LMI, de l’anglais linear matrix inequalities)ont acquis une grande popularité dans le domaine de la commande des systèmes ; elles per-mettent de formuler un grand nombre de problèmes d’analyse des systèmes dynamiques,et de synthèse de lois de commande. C’est avec la théorie de Lyapunov sur la stabilitédes états d’équilibre, plus que centenaire (fin du xixe), qu’apparaît la première LMI. Ellecaractérise la stabilité interne du système dynamique défini par le système différentielx(t) = Ax(t) (A étant une matrice carrée réelle) par l’existence d’une matrice symétriquedéfinie positive telle que ATP + PA est définie négative, ce que l’on note
ATP + PA ≺ 0 . (1)
P , de même taille que A, est appelée matrice de Lyapunov. De nombreux autres problèmesde commande conduisent à la résolution d’une ou plusieurs LMI, ou à la minimisationd’un critère linéaire sous contraintes de type LMI (que l’on dénomme programmationsemi-définie, ou SDP). La conception d’algorithmes efficaces, adaptés à de tel problèmesa largement popularisé les techniques LMI parmi les automaticiens : en effet, si la LMI(1) peut facilement être résolue de façon explicite (il suffit d’inverser le système linéaire
3

4 Introduction
ATP +PA = −I), ce n’est pas le cas d’une LMI quelconque, sous la forme générique (oustandard)
F0 +m∑
i=1xiFi ≺ 0 , (2)
où les matrices Fi (0 ≤ i ≤ n) sont symétriques réelles. Ce n’est qu’avec l’apparition deméthodes itératives, telles celles dites des points intérieurs, issues de la programmationlinéaire il y a une vingtaine d’années, que le domaine de recherche a dépassé le cadre del’Automatique théorique, pour connaître un essor certain.
Tous les problèmes de commande ne sont cependant pas réductibles à des LMI/SDP !Bien souvent, en pratique, et même pour le critère aussi essentiel qu’est la stabilité
interne, les expressions matricielles ne sont pas linéaires ou affines. Plus exactement, ellesne sont pas convexes, et les problèmes d’optimisation sous ce type de contraintes sontbien plus difficiles à résoudre. Quand bien même la synthèse d’un correcteur peut seramener, après d’éventuelles manipulations algébriques, à un problème SDP, la loi decommande obtenue est bien souvent du même ordre1 que le système à commander. Or,dans les applications embarquées, par exemple, les ressources en puissance de calcul eten mémoire sont limitées ; l’architecture du processeur cible peut être particulière, etcontraint la complexité de la loi de commande à implémenter.
De plus, la mise en œuvre de la commande sur le système réel s’accompagne d’uneétape de validation, ayant éventuellement pour conséquence la retouche du correcteur,rendue difficile par son niveau de complexité. La synthèse d’un correcteur plus simpleque le système à commander (on parle de correcteur d’ordre réduit) figure donc parmi lesthèmes de recherche actuels de l’Automatique, pour lesquels les applications attenduessont nombreuses.
D’autre part, les savoir-faire spécifiques à l’application considérée et la connaissancedu système réel impliquent généralement des contraintes sur la structure de la loi decommande : dans le cas de systèmes répartis, ou pour limiter la complexité des commandes,par exemple, il peut être imposé de ne pas lier la commande d’un actionneur à une mesuredonnée (commande dite décentralisée). Bien souvent, l’action du correcteur à synthétisera une forme prédéterminée (cas des correcteurs PID par exemple, très répandus, quicombinent une action proportionnelle, intégrale, et dérivée), et seuls quelques paramètresrestent à ajuster. Ces exemples plaident pour la prise en compte de la structure de la loide commande en amont, dès sa conception. Malheureusement, l’ajout a priori de tellescontraintes n’est pas aisé avec les méthodes actuelles à base de LMI, car les variablesdu correcteur n’apparaissent pas toujours explicitement dans les inégalités matricielleseffectivement résolues.
Enfin, la présence de variables de Lyapunov dans ces inégalités vient les compliquerartificiellement : d’une part, la taille de ces variables ne correspond pas à la dimensiondes variables du correcteur, mais croît avec le carré de l’ordre du système à comman-der. Ainsi, la synthèse de lois de commande pour les systèmes dynamiques comportant
1l’ordre d’une loi de commande, en tant que système dynamique supposé linéaire, est, intuitivement,la dimension minimale de la variable qui permet de décrire complètement son évolution, comme solutiond’un système différentiel linéaire. Nous en donnerons une définition précise au chapitre 1.

5
quelques dizaines d’états est difficile : un Boeing 767, modélisé autour d’un point de volpar un système linéaire d’ordre 55, nécessite 1540 variables scalaires pour la matrice deLyapunov. Les systèmes linéaires modélisant des équations aux dérivées partielles (EDP),obtenus par éléments finis, sont encore plus gros (souvent plusieurs milliers d’états) et sonttotalement hors de portée d’une synthèse par LMI/SDP. D’autre part, l’ordre de grandeurdes variables de Lyapunov n’a aucune raison d’être le même que celui des variables ducorrecteur, ce qui peut poser de sérieux problèmes d’ordre numérique lors de la résolutionou de l’optimisation.
Ces trois points fondamentaux constituent les principales limitations actuelles des mé-thodes de synthèse de lois de commande. L’abondance et la richesse des publicationsdans le domaine des LMI ces quinze dernières années n’a pas apporté de méthode numé-rique satisfaisante pour les problèmes de synthèse structurée ou d’ordre réduit. Celles quisont proposées sont souvent heuristiques, sans preuve de convergence, ou ne s’appliquentqu’à des classes très particulières de systèmes. Même les approches les plus récentes,qui proposent de résoudre les problèmes d’optimisation avec contraintes matricielles nonconvexes, restent limitées par la taille des variables de Lyapunov. Pourquoi alors ne paslaisser de côté ces variables auxiliaires pour se concentrer sur les véritables variables dedécision qui définissent le correcteur ? Ces variables sont généralement en petit nombre,car les lois de commande recherchées sont les plus simples possibles (correcteurs d’ordreréduit, voire statiques), et les mesures et commandes restent en nombre très raisonnable(typiquement, de une à quatre sorties mesurées, autant d’entrées commandées). Les formu-lations directes des problèmes de synthèse amènent cependant à minimiser des fonctionsqui se présentent comme un maximum de fonctions, de la forme
f∞(κ) , maxx∈X
f(κ, x) . (3)
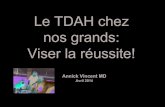
La variable κ regroupe tous les paramètres du correcteur, et x permet d’ ”indexer” lesfonctions sur un ensemble X , qui peut être discret ou continu. Ce dernier peut être unintervalle de fréquences dans le cas d’un critère portant sur les transferts (norme H∞ parexemple), un intervalle de dates pour un critère temporel, ou encore un ensemble fini d’in-dices s’il s’agit d’un critère spectral. On voit ici que cette formulation est suffisammentgénérale pour permettre d’exprimer, voire de combiner entre eux de nombreux critères desynthèse. Elle laisse au concepteur le soin de définir la forme de loi de commande qu’ilrecherche, à partir des paramètres scalaires contenus dans κ. Dans le cas d’un correcteurstatique, par exemple, κ contient tous les gains scalaires, canal par canal. Pour un correc-teur PID, κ regroupe les gains des actions proportionnelle, intégrale et dérivée. Le prix àpayer cependant d’une telle approche est le caractère non lisse, c’est-à-dire non partoutdifférentiable, du critère à minimiser. Qui plus est, les points où coïncident les valeurs deplusieurs fonctions partielles f(·, x) sont généralement de bons candidats pour constituerdes minima locaux (voir figure 1). Les algorithmes d’optimisation différentiable (descentede gradient, Newton ou quasi-Newton, programmation quadratique successive pour lesproblèmes sous contraintes, etc.) sont alors mis en défaut.
Le cadre théorique adapté est celui proposé par l’analyse non lisse, qui généralise les no-tions de différentielle et de gradient à certaines classes de fonctions (essentiellement les

6 Introduction
f2(κ)
f∞(κ) = max f1(κ), f2(κ)
f1(κ)
κκ∗
Fig. 1 – Fonction max sur R (en trait gras) : f∞ n’est pas dérivable en κ∗.
fonction convexes d’une part, et les fonctions localement lipschitziennes d’autre part).C’est un cadre riche d’un point de vue de l’Optimisation numérique, car il permet deconstruire des algorithmes de descente et de prouver leur convergence vers des minimalocaux. Ces algorithmes d’optimisation non lisse doivent être bien distingués des mé-thodes d’optimisation sans dérivée (parfois dites de recherche directe, ou d’ordre zéro),qui n’exploitent que les valeurs de la fonction critère pour progresser.
Ainsi le point de vue scientifique adopté dans cette thèse se situe à la croisée del’Automatique (puisque nous nous intéressons à des problèmes de commande des systèmeslinéaires), de l’Optimisation non lisse, et du développement logiciel. Sur ce dernier point,l’objectif concret est, en effet, de proposer un outil numérique cohérent, documenté, etévolutif, directement accessible à l’automaticien, et utilisable à la façon d’une “boîte àoutils” pour la synthèse de lois de commande. Cet outil permet de formuler et de résoudredes problèmes difficiles, notamment en terme de taille (système à commander d’ordreélevé), de contraintes sur le compensateur à synthétiser (ordre ou structure fixés), ou denature du problème (synthèse multimodèle, commande tolérante aux pannes). Il reposesur le socle théorique et algorithmique mis en place dans la thèse. C’est là que résidel’objectif central de nos travaux : démontrer le bien-fondé et la faisabilité de l’approchenon lisse pour la résolution de problèmes de synthèse de lois de commande. Pour ce faire,nous nous sommes attachés à présenter des applications variées, issues pour partie d’unebibliothèque de problèmes de commande (bibliothèque COMPleib de F. Leibfritz), maisaussi d’exemples isolés, difficiles, traités jusqu’alors par des méthodes heuristiques.
Le document est organisé en deux grandes parties : la première partie regroupe en deuxchapitres (chapitres 1 et 2) l’ensemble des notions qui nous ont semblé être fondamen-tales. Ces deux chapitres sont complémentaires dans leur thématique : le lecteur familierdes systèmes dynamiques linéaires et de leur commande en boucle fermée pourra survoler

7
le premier chapitre, dans lequel nous formulons les problèmes étudiés (stabilisation etsynthèse H∞) et donnons un aperçu des méthodes de résolution existantes. Il pourra enrevanche s’attarder sur la lecture du deuxième chapitre, qui expose les bases de l’Optimi-sation non différentiable, hors du contexte de l’Automatique, pour les fonctions convexes,puis pour les fonctions localement lipschitziennes. Plusieurs algorithmes d’optimisation ysont présentés (méthodes de faisceaux, méthodes pour des problèmes minimax).
La contribution scientifique de la thèse fait l’objet de la seconde partie, elle-mêmedivisée en quatre chapitres (chapitres 3 à 6). Chacun de ces chapitres reprend dans soncontenu une partie des travaux de thèse sous la forme d’une publication ou d’une commu-nication. Le choix de l’ordre de présentation des travaux ne respecte pas nécessairementla chronologie de ceux-ci, mais a été pensé de façon à proposer une progression logique aulecteur. Nous partons du problème de la stabilisation en boucle fermée (chapitre 3), quis’est révélé fondamental pour la minimisation ultérieure d’un critère de performance telque la norme H∞ (dont traitent les chapitres 4 à 6). Nous avons donc comparé différentestechniques d’optimisation permettant de rechercher un correcteur stabilisant, dont uneapproche non lisse originale que nous présentons. L’accent est ensuite mis sur la synthèseH∞, à travers un exemple de loop-shaping par un correcteur structuré (chapitre 4). L’al-gorithme de minimisation de la norme H∞ y est décrit. Il exploite le sous-différentiel deClarke, que l’on peut ici déterminer de façon complète par des calculs dans le domaine fré-quentiel. Ce même algorithme a été généralisé afin de l’appliquer de façon analogue à descritères formulés dans le domaine temporel ; le chapitre 5 présente ce point de vue unifié,et propose une série d’applications en synthèse structurée. L’exposé se termine (chapitre6) par une ouverture sur une toute autre approche pour la minimisation du critère H∞ :elle consiste à reformuler localement la synthèse comme un problème différentiable, puisà résoudre une suite de problèmes quadratiques dits “tangents”. Une convergence plusrapide en est attendue, et sera effectivement montrée.
Les notations utilisées dans la première partie du document sont standard, et untableau les récapitule dans les pages précédentes. Elles sont généralement suivies dansles quatre chapitres de la deuxième partie, sauf lorsque le contexte nous a conduits àpréférer une notation spécifique (en cas d’ambiguïté, par exemple) ; la nouvelle notationchoisie est alors explicitée en début de chapitre. Enfin, nous proposons au lecteur, en finde document, les références synthétiques des sources bibliographiques citées dans la thèse.

8 Introduction

Première partie
Notions fondamentales et cadre detravail
9


Chapitre 1
Introduction à la commande dessystèmes
Ce premier chapitre présente les problèmes de commande qui sont abordés dans lecadre de nos travaux, présentés dans la deuxième partie de ce document. Nous nousintéressons plus particulièrement aux problèmes de stabilisation et de synthèse H∞.
1.1 Terminologie et définitionsNous rappelons ici les concepts fondamentaux de l’Automatique indispensables à l’ana-
lyse et à la commande des systèmes dynamiques, et notamment des systèmes linéaires.Nous invitons le lecteur à se reporter aux ouvrages [2, 143] s’il souhaite en approfondircertains aspects.
1.1.1 Systèmes dynamiquesNous considérons un système linéaire et invariant dans le temps, en anglais linear and
time-invariant (LTI). C’est un processus liant des signaux d’entrée et de sortie, décrit parun système d’équations différentielles linéaires à coefficients constants. Cette hypothèseconduit généralement à manipuler une approximation du système réel considéré ; les sys-tèmes rencontrés dans les applications industrielles comportent en effet des non-linéarités,ne serait-ce qu’en raison de contraintes physiques ou de sécurité portant sur les action-neurs ou sur les capteurs, qui se traduisent par des saturations en position ou en vitesse.Il faut donc garder en mémoire que le domaine de validité d’un système linéaire invariantdans le temps est limité, par exemple, au voisinage d’un point de fonctionnement1, à unebande de fréquence, ou à un intervalle de temps.
D’autre part, les algorithmes qui ont été développés dans le cadre de la thèse neconcernent que les systèmes LTI à temps continu. Il n’y a cependant aucun obstaclethéorique à leur transposition aux systèmes discrets.
1On parle de point de vol en aéronautique, défini par l’altitude et la vitesse relative.
11

12 Chapitre 1. Introduction à la commande des systèmes
Représentation des systèmes LTI
Matrice de transfert Un système LTI à entrée et sortie scalaires (SISO, single-input/ single-output) est complètement décrit par sa réponse impulsionnelle g(t), c’est-à-direla réponse de ce système à une impulsion de Dirac. En effet, puisque la réponse y(t)du système est solution d’une équation différentielle linéaire à coefficients constants, leprincipe de superposition permet d’exprimer y(t) pour tout signal d’entrée u(t) comme leproduit de convolution
y(t) =∫ +∞
−∞g(t− τ)u(τ) dτ . (1.1)
Dans le domaine de Laplace, on obtient le produit simple
Y (s) = G(s).U(s) , (1.2)
où G est une fraction rationnelle, appelée fonction de transfert du système (s désignantla variable de Laplace).
Plus généralement, dans le cas d’un système LTI à entrée ou sortie vectorielle (MIMO,multi-input / multi-output), G devient une matrice de fractions rationnelles, appelée ma-trice de transfert. On dira que la matrice de transfert G est propre si
lim|s|→∞
‖G(s)‖ <∞ , (1.3)
et qu’elle est strictement propre si
lim|s|→∞
‖G(s)‖ = 0 . (1.4)
Cette représentation des systèmes par des matrices de transfert facilite leur inter-connexion puisqu’une association en série se traduit par un produit de matrices, uneassociation en parallèle par une somme. Par ailleurs, elle permet l’étude harmoniquedes systèmes, notamment SISO ; en effet, si le signal d’entrée est de type sinusoïdalu(t) = U0 sin(ω0t), alors la sortie est également sinusoïdale, de même fréquence, maisdéphasée de φ = arg [G (jω0)] et amplifiée de |G (jω0)|. Des outils graphiques issus dela commande classique (diagramme de Bode, lieu de Black/Nichols, lieu de Nyquist)permettent d’analyser les propriétés de tels systèmes, notamment en présence d’un asser-vissement. Cependant, la représentation d’un système LTI par sa matrice de transfert nerend pas compte de la dynamique interne du système.
Représentation d’état L’étude physique de nombreux systèmes dynamiques à tempscontinu permet de décrire leur comportement par un système d’équations de la forme
x(t) = f (x(t), u(t), t)y(t) = g (x(t), u(t), t) .
(1.5)
Ici encore, le vecteur u(t) ∈ Rm désigne l’entrée (ou commande) du système, et y(t) ∈ Rpla sortie, issue de la seconde équation de (1.5) (dite équation d’observation). Le vecteurx(t) ∈ Rn, solution de la première équation (équation différentielle ordinaire, dite équa-tion d’évolution), est appelé vecteur d’état du système. Il décrit, à un instant donné, la

1.1. Terminologie et définitions 13
configuration interne du système. Sous les hypothèses précitées de linéarité et d’invariancedans le temps, f et g sont linéaires et indépendantes de t, et les équations deviennent
x(t) = Ax(t) + Bu(t)y(t) = Cx(t) +Du(t) .
(1.6)
A ∈ Rn×n est appelée matrice d’état du système, B ∈ Rn×m matrice de commande,C ∈ Rp×n matrice d’observation et D ∈ Rp×m matrice de transmission directe. Etantdonnés la commande u(t) et l’état initial x(0) = x0, la sortie y(t) est donnée par
y(t) = CeAtx0 +∫ t
0CeA(t−τ)Bu(τ) dτ +Du(t) . (1.7)
Une simple transformation de Laplace des équations de (1.6), avec l’état initial x(0) =0, permet d’éliminer X(s) et de formuler la matrice de transfert du système
G(s) = C(sI − A)−1B +D . (1.8)Le quadruplet (A,B,C,D) est appelé réalisation de ce système LTI. Cette réalisation
dépend du choix du vecteur d’état x(t), et tout changement de variable x(t) = T−1x(t)(avec la matrice de passage T ∈ GLn(R)) dans (1.6) introduit une nouvelle réalisation(T−1AT, T−1B,CT,D) de ce même système. La matrice de transfert reste cependant in-changée, et définit de façon unique le système, du point de vue entrée-sortie. Notons quela matrice de transfert G est strictement propre si et seulement si D = 0.
Cette multiplicité des représentations en espace d’état amène à en privilégier certaines.Les raisons peuvent être d’ordre numérique (représentation d’état équilibrée par exemple,voir [143]), ou encore parce que certaines formes de réalisations facilitent le passage dela matrice de transfert à une représentation d’état. C’est le cas notamment des formescanoniques (forme diagonale ou de Jordan, et pour les systèmes SISO, forme compagnede commande ou d’observation). La dimension du vecteur d’état x(t) (appelée ordre de laréalisation (A,B,C,D)) n’est pas non plus définie de manière unique ; ainsi, parmi toutesles réalisations (A,B,C,D) d’une matrice de transfert G(s), celles pour lesquelles A ala plus petite taille possible sont qualifiées de minimales. L’ordre n associé est appelé ledegré de McMillan de G(s).
Commandabilité, observabilité Etant donnée une réalisation (A,B,C,D) d’unsystème LTI, le couple (A,B) est dit commandable si, par définition, pour tout t1 > 0,x0, x1 ∈ Rn, il existe une commande u : [0, t1]→ Rm, intégrable sur [0, t1], qui amène lavariable d’état x(t) de x(0) = x0 à x(t1) = x1, autrement dit, telle que
x1 = eAtx0 +∫ t1
0eA(t1−τ)Bu(τ) dτ . (1.9)
Le couple (C,A) est dit observable si, par définition, pour tout t1 > 0, l’état initialx(0) peut être déterminé de manière unique à partir de toute commande u : [0, t1]→ Rmet de la sortie y : [0, t1]→ Rp qui en résulte.

14 Chapitre 1. Introduction à la commande des systèmes
Comme il est d’usage, on dira dans la suite que la réalisation (A,B,C,D) d’un systèmeest commandable (resp. observable) si (A,B) est commandable (resp. si (C,A) est obser-vable).
Remarques:– On peut, sans amoindrir l’énoncé, remplacer x0 par 0 dans la définition de la com-mandabilité.
– De même, l’observabilité peut être définie de façon équivalente en ne considérantque la sortie y : [0, t1]→ Rp résultant de la commande nulle (y est alors la réponselibre du système).
– Une fois déterminé l’unique x(0) d’une réalisation observable (A,B,C,D), toutevaleur prise par le vecteur d’état x(t) sur [0, t] peut être calculée avec
x(t) = eAtx(0) +∫ t
0eA(t−τ)Bu(τ) dτ . (1.10)
Il existe de nombreuses caractérisations algébriques de ces deux notions :(A,B) est commandable si et seulement si la matrice de commandabilité
C ,[B AB A2B . . . An−1B
](1.11)
est de plein rang (n, en ligne).(C,A) est observable si et seulement si la matrice d’observabilité
O ,
CCACA2
...CAn−1
(1.12)
est de plein rang (n, en colonne).On dispose aussi des caractérisations modales suivantes : (A,B) est commandable (resp.(C,A) est observable) si et seulement si tout vecteur propre à gauche v de A est tel quev∗B 6= 0 (resp. tout vecteur propre à droite v de A est tel que Cv 6= 0).
Cela conduit à définir la commandabilité et l’observabilité par mode du système, c’est-à-dire par valeur propre de A, vis-à-vis de B et C : un mode λ ∈ Λ(A) est commandablesi, par définition, pour tout vecteur propre à gauche (resp. à droite) v associé à la valeurpropre λ, on a v∗B 6= 0 (resp. Cv 6= 0). Ainsi (A,B) est commandable (resp. (C,A)est observable) si et seulement si tous les modes du système sont commandables (resp.observables).
Le critère de Popov-Belevitch-Hautus (ou PBH) traduit cette interprétation modalepar une condition de rang : (A,B) est commandable si et seulement si, pour toute valeurpropre λ ∈ Λ(A) la matrice [
A− λIn B]
(1.13)

1.1. Terminologie et définitions 15
est de plein rang (n, en ligne). De même, (C,A) est observable si et seulement si, pourtoute valeur propre λ ∈ Λ(A) la matrice
[A− λIn
C
](1.14)
est de plein rang (n, en colonne).Nous donnons une dernière caractérisation, qui permet de lier la commandabilité à la
notion de placement de valeurs propres. En effet, (A,B) est commandable (resp. (C,A) estobservable) si et seulement si les valeurs propres de A + BF (resp. de A + LC) peuventêtre placées arbitrairement2 dans C par un choix convenable de F ∈ Rm×n (resp. deL ∈ Rn×p).
Stabilisabilité, détectabilité Les notions de stabilisabilité et de détectabilité sontvoisines, mais moins fortes que les précédentes : (A,B) est stabilisable si les modes instablesde A sont commandables, c’est-à-dire, avec le critère PBH, si pour toute valeur propreλ ∈ Λ(A) ∩ C+ la matrice (1.13) est de rang n. De façon duale, (C,A) est détectable siles modes instables de A sont observables : pour toute valeur propre λ ∈ Λ(A) ∩ C+ lamatrice (1.14) est de rang n.
On a enfin des caractérisations par propriétés de placement de valeurs propres : (A,B)est stabilisable (resp. (C,A) détectable) s’il existe F ∈ Rm×n (resp. L ∈ Rn×p) tel queA+BF (resp. A+LC) est Hurwitz, c’est-à-dire que ses valeurs propres sont toutes dansle demi-plan gauche C−.
La commandabilité et l’observabilité, tout comme la stabilisabilité et la détectabilité,sont des notions d’espace d’état. Si elles sont invariantes par changement de variable,elles dépendent cependant du choix de la dimension de la variable d’état. Ainsi, parmitoutes les réalisations (A,B,C,D) d’une matrice de transfert G(s), les réalisations à lafois commandables et observables sont exactement celles qui sont minimales.
Pôles et zéros d’un système LTI
Les pôles (resp. les zéros) d’un système SISO sont les racines du numérateur (resp. dudénominateur) de sa fonction de transfert G(s), supposée irréductible. Pour un systèmeMIMO, les pôles sont les racines du polynôme det(sI−A), c’est-à-dire les valeurs propresde A, où (A,B,C,D) est une réalisation minimale de G(s). Plus généralement, les pôlesd’une réalisation quelconque (A,B,C,D) de G(s) sont les valeurs propres de A. La défi-nition de zéros dans le cas MIMO est plus délicate que dans le cas SISO, et nécessite d’endistinguer plusieurs types :
– les valeurs s ∈ C telles que le rang de la matrice[A− sI BC D
](1.15)
est déficient sont les zéros invariants (ou simplement les zéros),2Sous réserve que toute valeur propre non réelle soit couplée avec sa conjuguée.

16 Chapitre 1. Introduction à la commande des systèmes
– les valeurs s ∈ C qui annulent complètement la matrice de transfert G(s) sont leszéros de blocage.
En particulier, les modes non observables ou non commandables sont des zéros invariants.
1.1.2 Normes de signauxOn considère un signal vectoriel complexe à temps continu u : R+ → Cm. On définit
la norme infini ou norme sup de u par‖u‖∞ , sup
t≥0‖u(t)‖∞ . (1.16)
Si u est de carré sommable sur R+ (c’est-à-dire si u ∈ L2(R+), espace de Hilbert), ondéfinit la norme
‖u‖2 ,(∫ ∞
0‖u(t)‖22 dt
) 12, (1.17)
dénommée norme L2. C’est la norme induite par le produit scalaire sur L2(R+)
〈u, v〉 ,∫ ∞0
u(t)Hv(t) dt . (1.18)
Elle s’interprète comme l’énergie du signal, et s’exprime de façon équivalente dans ledomaine fréquentiel
‖u‖2 =( 1
2π
∫ ∞−∞‖U(jω)‖22 dω
) 12, (1.19)
grâce au théorème de Parseval. L’expression à droite de l’égalité définit une norme (encorenotée ‖ · ‖2) sur l’espace de Hardy H2, constitué des fonctions de la variable complexe U ,analytiques dans le demi-plan droit C+, et telles que
supσ>0
( 12π
∫ ∞−∞‖U(σ + jω)‖22 dω
) 12<∞ . (1.20)
C’est, là encore, la norme induite par le produits scalaire sur H2 (encore noté 〈·, ·〉)〈U, V 〉 , 1
2π
∫ ∞−∞
U(jω)HV (jω) dω . (1.21)
L’espace H2 est l’image de L2(R+) par la transformée de Fourier, qui réalise ainsi unisomorphisme d’espaces de Hilbert.
1.1.3 Stabilité des systèmes linéairesLa notion de stabilité est fondamentale pour les systèmes dynamiques, qu’il s’agisse de
commande en boucle ouverte ou en boucle fermée. Définir la stabilité pour un système LTIdépend du point de vue adopté pour le représenter : dans le cas d’une approche entrée-sortie, par matrice de transfert, on parle de stabilité BIBO (bounded input / boundedoutput) ; si l’état x(t) du système est connu, au moyen d’une réalisation
x(t) = Ax(t) +Bu(t)y(t) = Cx(t) +Du(t) .
(1.22)
on peut introduire la notion (plus forte) de stabilité interne.

1.1. Terminologie et définitions 17
Stabilité BIBO
Un système (LTI ou autre) est BIBO-stable si, par définition, pour toute entrée u(t)telle que ‖u‖∞ < ∞, la sortie y(t) vérifie ‖y‖∞ < ∞. Dans le cas des systèmes LTI,la stabilité BIBO est caractérisée par la localisation de tous les pôles dans le demi-plangauche C−. D’un point de vue numérique, des critères algébriques (Routh-Hurwitz no-tamment) permettent de vérifier la stabilité BIBO d’un système à partir des coefficientsdu dénominateur de sa fonction de transfert, sans avoir à expliciter ses pôles.
Ainsi la stabilité BIBO garantit que, sous l’action d’une commande bornée pour lanorme infini, la réponse forcée du système reste finie. Elle ne dit rien de l’évolution dusystème lui-même, dont la dynamique interne peut faire croître considérablement certainesgrandeurs d’état, et engendrer par la même l’altération voire la destruction du système.La notion de stabilité interne permet de combler cette carence.
Stabilité interne
Le système LTI (1.22), défini par la réalisation (A,B,C,D), est stable de façon internesi, par définition, pour tout état initial x(0) = x0, et en l’absence de signal de commande(u(t) = 0, ∀t ≥ 0), on a
limt→∞ ‖x (t)‖ = 0 . (1.23)
L’état d’équilibre xe = 0 est dit dans ce cas asymptotiquement stable. On montre aisémentque la stabilité interne est équivalente à la propriété de Hurwitz de la matrice d’état A(toutes ses valeurs propres sont dans le demi-plan gauche C−).
La stabilité interne implique la stabilité BIBO de la matrice de transfert associéeG(s) = C(sI − A)−1B + D, puisque les pôles du système sont des valeurs propres deA. La réciproque est fausse en général, sauf si les modes instables de A sont comman-dables et observables (c’est-à-dire si (A,B) est stabilisable et (C,A) est détectable). On aalors équivalence des deux notions de stabilité. C’est le cas en particulier si la réalisation(A,B,C,D) est minimale, les pôles de G étant alors exactement les valeurs propres de A.
Afin de caractériser la stabilité interne de façon analytique, on définit, pour toutematrice M ∈ Rn×n, l’abscisse spectrale de M , notée α(M), comme la plus grande partieréelle des valeurs propres de M :
α(M) , maxλ∈Λ(M)
Re (λ) . (1.24)
La stabilité interne du système (1.22) est donc équivalente à l’inégalité α(A) < 0. Si lamatrice d’état dépend de paramètres (A = A(κ)), la recherche de valeurs de paramètresrendant le système stable peut ainsi être ramenée à un problème de minimisation del’abscisse spectrale.
Une autre approche consiste à caractériser la stabilité interne par la condition deLyapunov, exprimée en terme d’inégalité linéaire matricielle (ou LMI, Linear Matrix In-equality) :Théorème 1.1.1 Le système linéaire (1.22) est stable de façon interne si et seulementsi il existe une matrice P ∈ Sn(R), P 0, telle que
ATP + PA ≺ 0 . (1.25)

18 Chapitre 1. Introduction à la commande des systèmes
Nous dresserons un inventaire des techniques de stabilisation en boucle fermée dansla section 1.2.2 ci-après, ainsi qu’au chapitre 3.
1.1.4 Normes de systèmesLa conception d’une loi de commande doit généralement répondre, au delà de l’exigence
de stabilité, à des spécifications relatives à la “taille” des signaux ou des matrices detransfert : on cherchera par exemple à réduire l’impact sur le comportement du systèmedes perturbations pouvant affecter la commande ou la sortie, ou encore à minimiser l’effetdu bruit apparaissant sur les mesures. On pourra aussi exiger de maintenir la puissancedélivrée par les actionneurs en deçà d’une certaine limite. Ces objectifs ou contraintes deperformance sont exprimées au moyen de normes de systèmes.
Norme H∞Soit G la matrice de transfert d’un système LTI, supposé stable. C’est une fonction
rationnelle réelle de la variable complexe s, comme fraction de polynômes à coefficientsréels. Elle est propre, analytique et bornée dans le demi-plan droit C+. On définit sanorme H∞ par
‖G‖∞ , supRe s>0
σ [G(s)] (1.26)
= supω∈R
σ [G(jω)]
= supω∈R+
σ [G(jω)] .
où σ [G(s)] désigne la plus grande valeur singulière de G(s).On montre que l’espace H2 (défini en 1.1.2) est invariant par l’opérateur linéaire MG :
U 7→ GU , et que la norme H∞ de G coïncide avec la norme de MG en tant qu’opérateurlinéaire H2 → H2. ‖G‖∞ est donc la norme induite par la norme L2
‖G‖∞ = sup‖U‖2<∞U 6=0
‖GU‖2‖U‖2 (1.27)
et mesure le gain maximal en énergie du système.La norme H∞ n’est pas définie dans le cas d’un système LTI instable (appliquer la
définition (1.26) aboutirait à une valeur infinie). Cependant, pour un système LTI sanspôles sur l’axe imaginaire, de matrice de transfert G, la quantité sup σ [G(jω)] / ω ∈ Rest finie. C’est la norme L∞ de G, qui coïncide avec la norme H∞ dès que G est stable.
On introduit enfin la norme H∞ dite a-shiftée (a-shifted H∞ norm en anglais). Poura ∈ R fixé, elle est définie par
‖G‖∞,a , supRe s>−a
σ [G(s)] = ‖Ga‖∞ , (1.28)
où G est la matrice de transfert d’un système LTI, et Ga(s) = G(s−a), ce qui a pour effetde translater de a les pôles du système dans le plan complexe. La norme H∞ a-shiftée est

1.2. Problèmes de synthèse pour la commande 19
finie si et seulement les pôles de G sont à partie réelle strictement inférieure à −a. Ainsien choisissant a < 0 suffisamment grand en valeur absolue, la norme shiftée permet demesurer le gain d’un système instable.
Norme H2
La norme H2 est définie pour toute matrice de transfert stable strictement propre G.Elle vaut
‖G‖2 ,( 1
2π
∫ ∞−∞
Tr(G(jω)HG(jω)
)dω) 1
2(1.29)
= sup‖U‖∞<∞U 6=0
‖GU‖2‖U‖∞ . (1.30)
avec ‖U‖∞ = supRe s>0 ‖U(s)‖ = supω∈R ‖U(jω)‖.La norme H2 mesure l’énergie en sortie du système, lorsqu’un bruit blanc normalisé
(c’est-à-dire de densité spectrale uniforme Suu(jω) = U(jω)UH(jω) = I) est appliqué enentrée.
1.2 Problèmes de synthèse pour la commandeLa commande3 des systèmes dynamiques ne recouvre pas tout à fait les mêmes notions
suivant que l’on se place du point de vue du mathématicien ou de celui de l’automaticien,comme le souligne Bergounioux dans [21]. Le but poursuivi est le même : trouver uneexpression du signal de commande u(t) à appliquer en entrée du système afin que ce derniervérifie un ensemble de spécifications. Cela peut être par exemple un critère à minimiser(comme la norme H2 d’un transfert par exemple), on parle alors de commande optimale. Ilpeut s’agir simplement de trouver une commande qui stabilise le système, ou, dans le casd’un système linéaire, qui permet de placer les pôles dans le plan complexe (commandemodale). Le mathématicien va rechercher une telle commande dans un espace fonctionneldonné, dont les éléments ne dépendent pas a priori de la variable d’état x du système,ou de la sortie y. C’est ce que l’automaticien nomme commande en boucle ouverte, car lesystème est “piloté” en aveugle par un signal précalculé. La commande en boucle ferméeest, au contraire, construite en temps-réel, à partir des signaux disponibles en sortie dusystème et mesurés par des capteurs. Les signaux de commande sont alors appliqués enentrée via des actionneurs. Le processus de fabrication du signal de commande définit unsystème dynamique en tant que tel, que l’on appelle correcteur, compensateur, ou encoreloi de commande. Nous nous limiterons dans le cadre de notre étude aux correcteurs demême type que les systèmes considérés, c’est-à-dire linéaires et invariants dans le temps(LTI).
3on trouve parfois le terme contrôle, ou contrôle actif, par opposition au contrôle passif qui impliqueune modification de la structure du système.

20 Chapitre 1. Introduction à la commande des systèmes
1.2.1 Forme standard pour la commandeNous introduisons tout d’abord une formulation générique dite standard, représenta-
tion qui donne un cadre très général pour la synthèse de lois de commande. Elle facilitel’explicitation du cahier des charges en isolant, parmi les entrées et sorties du système,celles qui interviennent dans les spécifications.
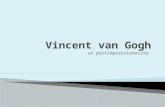
Parmi les entrées du système commandé (noté P (s) sur la figure 1.1), on distingue cellesproduites par le correcteur K(s) de celles dites exogènes. Ces dernières sont regroupéesdans le vecteur w ∈ Rm1 et comprennent les perturbations (rafales de vent pour unaéronef), les bruits, ou encore les signaux de consigne. Finalement, l’entrée u ∈ Rm2
ne contient que les signaux des actionneurs générés par le correcteur, c’est-à-dire lescommandes. De même, parmi toutes les sorties du système, celles qui sont accessibles aucorrecteur pour l’élaboration des ces commandes sont désignées par le vecteur y ∈ Rp2 (cesont les mesures), tandis que z ∈ Rp1 contient les sorties régulées, sur lesquelles portentles spécifications.
sorties mesuréescommandes
sorties réguléesentrées exogènes
y
zw
u
K(s)
P (s)
Fig. 1.1 – La forme standard.
La forme standard permet donc une description de différentes configurations de bouclesfermées (boucle de suivi, boucle de régulation, asservissement à un ou plusieurs degrés deliberté) à l’aide d’une représentation unique.
Transformation linéaire fractionnaire
La matrice de transfert P (s), des signaux d’entrée w et u vers les signaux de sortie zet y, est partitionnée en quatre blocs, associés à chacun des quatre canaux du système,de la façon suivante : [
Z(s)Y (s)
]=[P11(s) P12(s)P21(s) P22(s)
] [W (s)U(s)
]. (1.31)
L’interconnexion en boucle fermée du système et du correcteur, représentés par leursmatrices de transfert respectives P et K (supposées propres), constitue un nouveau sys-tème LTI, d’entrée w et de sortie z. La matrice de transfert en boucle fermée Tw→z est
Tw→z(s) = P11(s) + P12(s)K(s)(I − P22(s)K(s))−1P21(s) , (1.32)

1.2. Problèmes de synthèse pour la commande 21
appelée transformation linéaire fractionnaire (LFT ) ou produit de Redheffer de P et K.Le système bouclé est dit bien posé si, par définition, cette matrice de transfert existeet est propre, ou, de façon équivalente, dès que I − P22(∞)K(∞) est inversible. Cettehypothèse de travail, qui revient à s’assurer que la boucle fermée possède bien un sensphysique, sera toujours supposée vraie par la suite.
Représentation d´état
La formulation LFT et l’approche par variable d’état offrent un cadre méthodologiqueriche pour la résolution de problèmes de commande, notamment dans le cas de la synthèseH∞. Nous reprenons donc ici les notations usuelles pour la forme standard exprimée enespace d’état. Supposons que les sorties z et y sont liées aux entrées w et u par la réalisation
x(t) = Ax(t) +B1w(t) +B2u(t)z(t) = C1x(t) +D11w(t) +D12u(t)y(t) = C2x(t) +D12w(t) +D22u(t) ,
(1.33)
avec x ∈ Rn, et la condition initiale x(0) = 0, de sorte que
P (s) =[P11(s) P12(s)P21(s) P22(s)
]=[C1C2
](sI − A)−1
[B1 B2
]+[D11 D12D21 D22
]. (1.34)
De même, soit ˙xK(t) = AKxK(t) +BKy(t)u(t) = CKxK(t) +DKy(t)
(1.35)
une réalisation du correcteur, de variable d’état xK ∈ RnK (avec xK(0) = 0), telle que
K(s) = CK(sI − AK)−1BK +DK . (1.36)
Afin d’alléger la formulation en espace d’état de la forme standard (figure 1.1), nousfaisons l’hypothèse que le bloc P22 de la matrice de transfert P est strictement propre, cequi revient à poser D22 = 0 (pas de transmission directe de u vers y). Cette condition esttrès souvent vérifiée dans les applications, et peut se poser sans perte de généralité dansles problèmes de synthèse de correcteur. En effet, si D22 6= 0, il suffit de déporter le blocde transmission directe dans le correcteur, en posant
y(t) , C2x(t) +D21w(t) (1.37)
à la place de la dernière égalité dans (1.33) et, par suite, de remplacer (1.35) par
˙xK(t) =[AK +BKD22 (I −DKD22)−1CK
]xK(t) + BK (I −D22DK)−1 y(t)
u(t) = (I −DKD22)−1CKxK(t) + (I −DKD22)−1DK y(t) .(1.38)
I − DKD22 et I − D22DK sont inversibles puisque la boucle fermée est bien posée, parhypothèse. Ainsi un simple changement de variable au niveau du correcteur permet de

22 Chapitre 1. Introduction à la commande des systèmes
se ramener au cas D22 = 0, sans conséquence sur le transfert Tw→z. On obtient alors, enéliminant u et y, une réalisation de la boucle fermée
x(t) = (A+B2DKC2)x(t) +B2CKxK(t) + (B1 +B2DKD21)w(t)˙xK(t) = BKC2x(t) + AKxK(t) +BKD21w(t)z(t) = (C1 +D12DKC2)x(t) +D12CKxK(t) + (D11 +D12DKD21)w(t) ,
(1.39)
de sorte que
Tw→z(s) = Cc(K) [sI − Ac (K)]−1Bc(K) +Dc(K) , (1.40)
avec
Ac(K) =[A+B2DKC2 B2CK
BKC2 AK
], Bc(K) =
[B1 +B2DKD21
BKD21
],
Cc(K) =[C1 +D12DKC2 D12CK
], Dc(K) =
[D11 +D12DKD21
].
(1.41)
Nous ferons donc toujours l’hypothèse D22 = 0 dans notre travail.
Retour statique, retour dynamique
Les contraintes d’implémentation des correcteurs, en termes de puissance de calculdisponible, de mémoire, mais aussi de coût ou de fiabilité, font que les lois de commandesimples sont privilégiées lors de la conception.
La commande par retour statique de sortie (SOF en anglais, pour static output feed-back) apparaît comme un cas particulier de la commande définie par (1.35), avec nK = 0.Le correcteur qui la réalise est réduit à un simple gain matriciel y(t) = DKu(t) = Ku(t).La synthèse d’un correcteur dynamique, d’ordre fixé nK ≥ 1, permet d’accéder à des loisde commande plus élaborées. Lorsque nK < n, on parle d’ordre réduit, et pour nK = nd’ordre plein. Notons que la commande par retour dynamique de sortie (DOF en anglais),d’ordre fixé, se ramène formellement à l’action d’un correcteur statique K, constitué desblocs AK , BK , CK et DK , par augmentation de x, u et y (voir par exemple [95]). Plusprécisément, en posant
x =[xxK
], y =
[xKy
], u =
[xKu
], (1.42)
nous obtenons la réalisation
A =[A 00 0nK
], B1 =
[B10
], B2 =
[0 B2InK 0
],
C1 =[C1 0
], D11 = D11 , D12 =
[0 D12
],
C2 =[
0 InKC2 0
], D21 =
[0D21
], D22 = 0 .
(1.43)

1.2. Problèmes de synthèse pour la commande 23
Le système ainsi augmenté, commandé par
u =[AK BK
CK DK
]
︸ ︷︷ ︸K
y (1.44)
coïncide avec la boucle fermée obtenue par retour dynamique. Dans le cas de la commandepar un correcteur d’ordre fixé, nous pourrons donc supposer sans perte de généralité etaprès augmentation du système à commander que ce correcteur est statique.
1.2.2 StabilisationLa stabilisation d’un système LTI par retour statique de sortie consiste à rechercher,
s’il en existe, un correcteur K ∈ Rm2×p2 tel que la boucle fermée soit stable de manièreinterne, c’est-à-dire tel que
Λ(A+B2KC2) ⊂ C− . (1.45)
En utilisant l’abscisse spectrale α définie par (1.24), cela revient à chercher K tel queα(A+B2KC2) < 0.
Lorsque le correcteur recherché est dynamique, il s’agit de déterminer, toujours souscondition d’existence, des matrices AK , BK , CK et DK telles que
Λ(Ac(K)) ⊂ C− avec Ac(K) =[A+B2DKC2 B2CK
BKC2 AK
]. (1.46)
La stabilisation par retour de sortie demeure un problème ouvert de la commande[22]. Il apparaît comme le plus souvent cité dans l’enquête [23] compilant les points devue d’automaticiens sur les enjeux de leur discipline. Il a été, et est toujours, l’objet de pu-blications très abondantes, dont le lecteur trouvera une sélection de références dans [100].La plupart des approches existant pour trouver un correcteur K stabilisant sont présen-tées dans [131]. Dans certains cas particuliers, l’existence d’un correcteur K stabilisant(la stabilisabilité) peut être vérifiée par des critères algébriques bien connus [143] :
– Si nK = 0 et C = I (retour d’état statique), il faut et il suffit que le couple(A,B2) soit stabilisable (par définition même), ce qui revient à vérifier que les modesinstables de A sont commandables, soit encore [A− λIn B2] de plein rang (en ligne)pour toute valeur propre λ ∈ Λ(A) ∩ C+ (critère PBH).
– Si nK = n (retour de sortie d’ordre plein), une condition nécessaire et suffisante est(A,B2) stabilisable et (C2, A) détectable, c’est-à-dire que les modes instables de Asont commandables et observables. Elle peut être vérifiée par le critère PBH.
– Si nK < n (retour de sortie d’ordre réduit), cette dernière condition n’est que né-cessaire.
– Si nK = 0 (retour de sortie statique), la condition suivante dite PIP paire (pourparity interlacing property) portant sur les pôles et les zéros de G(s) = C2(sI −A)−1B2 est une condition nécessaire de stabilisabilité [131] :– le nombre de pôles réels de G (comptés avec leur multiplicité) entre deux zéros
de blocage réels de G positifs ou nuls est pair, et

24 Chapitre 1. Introduction à la commande des systèmes
– le nombre de zéros de blocage réels de G entre deux pôles réels de G est pair.Ces conditions d’existence sont d’un faible intérêt pratique car elles ne s’appliquent
qu’à un nombre limité de problèmes de stabilisabilité, et surtout parce qu’elles ne sontpas constructives. D’autre part, la complexité du problème de stabilisabilité par retourde sortie statique n’est pas établie, mais des problèmes très voisins (stabilisabilité parretour d’état avec correcteur borné, stabilisation simultanée par retour de sortie, . . .) sontclairement NP-difficiles [24].
Des méthodes constructives sont cependant bien connues dans le cas des systèmesSISO, pour lesquelsK est un scalaire : l’étude graphique du lieu des pôles de la fonction detransfert en boucle fermée (dit lieu d’Evans) permet de répondre à la question d’existenced’un correcteur statique stabilisant, et donne le cas échéant une valeur numérique pourK. Il en est de même pour le critère algébrique de Routh-Hurwitz.
Dans le cas des systèmes MIMO, la tâche de construction d’un correcteur stabilisantest plus complexe, et différentes méthodes ont été proposées, faisant appel à des domainesdes mathématiques très divers. Nous en donnons ci-après un aperçu.
Méthodes de décision
Il est toujours possible de ramener le problème de stabilité de la boucle fermée à unensemble d’inéquations scalaires polynômiales, dont les inconnues sont les éléments deK. Cela peut être réalisé au moyen des déterminants de Hurwitz associés à det(sI −A − B2KC2), qui sont tous strictement positifs dès que les pôles sont dans le demi-plangauche C− (critère de Routh-Hurwitz), ou encore par le test de Liénard-Chipart, quinécessite environ moitié moins d’inégalités avec déterminants que Routh-Hurwitz. L’idéemaîtresse présentée dans [3] consiste à considérer cet ensemble d’inégalités, munies dequantificateurs, comme une proposition logique, puis à utiliser une méthode de décision(algorithmes de Tarski et de Seidenberg) afin de réduire le nombre de quantificateurs etdécider, au bout d’un nombre fini d’étapes, si la proposition est vraie ou fausse, c’est-à-diresi le système est stabilisable ou non. Si c’est effectivement le cas, alors la méthode permetaussi de construire un correcteur stabilisant. Un exemple avec n = 3, m2 = 1 et p2 = 2 estdétaillé et commenté dans [3]. Même avec ces dimensions réduites (le critère de stabiliténe comporte que trois inégalités), le nombre d’étapes et de manipulations nécessaires àla mise en œuvre de l’algorithme de Tarski est important. Ainsi, si cette approche desproblèmes de stabilité par la décidabilité est séduisante, elle se heurte cependant à lacomplexité exponentielle des algorithmes d’élimination de quantificateurs existants [20].
Inégalités linéaires matricielles
La théorie de Lyapunov permet de ramener le problème de stabilisation par retourde sortie statique à la résolution d’une inégalité matricielle de la forme de (1.25). Ainsi,le système en boucle fermée est stable de manière interne si et seulement si il existe unematrice K ∈ Rm2×p2 et une matrice P ∈ Sn(R), P 0, telles que
(A+B2KC2)TP + P (A+B2KC2) ≺ 0 . (1.47)Une telle inéquation matricielle est difficile à résoudre, parce que les inconnues (P,K)n’interviennent pas de façon linéaire dans (1.47) ; notons cependant que dans le cas du

1.2. Problèmes de synthèse pour la commande 25
retour d’état (C2 = In), le changement de variables Q = P−1 et Y = KQ permet deramener (1.47) à la LMI suivante, linéaire en (Q, Y )
QAT + AQ+ Y TBT2 +B2Y ≺ 0 (1.48)
avec Q 0. Le correcteur est ensuite reconstruit avec K = Y Q−1 . La complexité desproblèmes LMI est polynômiale en le nombre de variables et il existe des méthodes nu-mériques performantes pour les résoudre (méthodes de points intérieurs, algorithme del’ellipsoïde, optimisation non lisse, . . .).
Revenons au cas général du retour de sortie (1.47) ; il s’agit d’une inégalité bilinéairematricielle (ou BMI, Bilinear Matrix Inequality), dont la résolution est un problème NP-difficile [135]. Les méthodes numériques de stabilisation basées sur la théorie de Lyapunovs’appuient donc plutôt sur le théorème suivant [75].
Théorème 1.2.1 Le système (1.33) admet un correcteur statique stabilisant (par retourde sortie) si et seulement si il existe des matrices X, Y ∈ Sn(R), X 0, Y 0, tellesque
W TBT2
(AX +XAT )WBT2≺ 0, (1.49)
W TC2(A
TY + Y A)WC2 ≺ 0, (1.50)XY = In, (1.51)
où WBT2et WC2 sont des matrices dont les colonnes forment respectivement des bases des
noyaux de BT2 et de C2.
L’ensemble des correcteurs statiques stabilisants K associés à la matrice de LyapunovP = Y , c’est-à-dire qui vérifient (A+ B2KC2)TY + Y (A+ B2KC2) ≺ 0, est alors décritpar les matrices de la forme
K = −R−1BT2 Y Q
−1CT2 (C2Q
−1CT2 )−1 + S
12L(C2Q
−1CT2 )− 1
2 , (1.52)
où S ∈ Sm2(R), S 0, est définie par
S , R−1 −R−1BT2 Y Q
−1[Q− CT
2
(C2Q
−1CT2
)−1C2
]−1Q−1Y B2R
−1, (1.53)
et R ∈ Sm2(R), R 0, est choisie telle que
R−1 B+2
[Φ− ΦWBT2
(W TBT2
ΦWBT2
)−1W TBT2
Φ](B+
2 )T , (1.54)
Φ = XAT + AX. (1.55)
Enfin, L ∈ Rm2×p2 doit vérifier ‖L‖2 < 1, et Q ∈ Sn(R), Q 0, est déterminée par
Q = Y B2R−1BT
2 Y − Y A− ATY. (1.56)

26 Chapitre 1. Introduction à la commande des systèmes
Bien que (1.49) et (1.50) soient des LMI, la contrainte de couplage (1.51) est nonconvexe et rend la résolution en (X, Y ) difficile. La complexité en est d’ailleurs connue :le problème est NP-difficile [52]. Il a donné lieu à de nombreux algorithmes heuristiques,dont la convergence vers une solution de (1.49)-(1.51) n’est pas garantie (min/max [58],projections alternées [62], par exemple). Les méthodes de type Lagrangien augmenté par-tiel [49, 15], avec contraintes LMI explicites, prennent en compte la contrainte non linéaire(1.51) et sont assorties d’une preuve de convergence [106] vers une solution locale. Leurmise en œuvre est cependant coûteuse en temps de calcul.
Dès qu’une solution de (1.49)-(1.51) est connue, un correcteur statique stabilisant Kse déduit explicitement avec (1.52), après avoir fixé les paramètres R et L. Une alternativeconsiste à résoudre l’inégalité matricielle (A+B2KC2)TY +Y (A+B2KC2) ≺ 0, devenueune LMI en K puisque la variable de Lyapunov Y est maintenant fixée.
Optimisation non linéaire
Nous l’avons déjà noté, la stabilisation du système (1.33) par un correcteur statiquepeut être assimilée à un problème d’optimisation, en introduisant l’abscisse spectrale de lamatrice d’état en boucle fermée Ac(K) = A+B2KC2. Nous considérons donc le problèmed’optimisation
minK∈Rm2×p2
α(A+B2KC2). (1.57)
L’application K 7→ A + B2KC2 est affine, mais α n’a pas de “bonnes” propriétéspour l’optimisation : elle est continue, mais non convexe, et surtout non lisse, et mêmenon lipschitzienne en général. Une méthode numérique inspirée des méthodes de faisceaux(gradient bundle methods, présentées dans le chapitre suivant) est introduite dans [35] pourrésoudre (1.57). Elle comporte cependant, à chaque itération, une étape d’échantillonnageautour du correcteur courant, ce qui lui donne un caractère aléatoire et ne permet pas lareproductibilité de la séquence d’optimisation. C’est pourquoi nous proposons au chapitre3 d’appliquer un algorithme déterministe de minimisation non lisse pour résoudre (1.57).
D’autres fonctions critères sont proposées dans [36]. Elles sont introduites à partirdu pseudo-spectre Λε, partie fermée de C définie pour ε ≥ 0 fixé et pour toute matriceX ∈ Cn×n par
Λε(X) ,z ∈ C : ∃Y ∈ Cn×n det (Y − zIn) = 0 et ‖Y −X‖2 ≤ ε
. (1.58)
On définit ainsi– l’abscisse pseudo-spectrale αε(X), plus grande partie réelle des éléments de Λε(X) :
αε(X) , max Re z : z ∈ Λε(X) , (1.59)
– la distance à l’instabilité β(X), définie comme la distance de X à l’ensemble (fermé)des matrices non Hurwitz de Cn×n :
β(X) , min‖Y −X‖2 : Y ∈ Cn×n, α(Y ) ≥ 0
. (1.60)
Ces deux quantités sont liées entre elles par la relation
αε(X) < 0 ⇐⇒ β(X) > ε . (1.61)

1.2. Problèmes de synthèse pour la commande 27
De plus, si on pose G(s) , (sI −X)−1, et si X est Hurwitz, on a
β(X) = ‖G‖−1∞ . (1.62)
La minimisation de αε(Ac(K)) (avec ε > 0 fixé), permet de rechercher un correcteurstabilisant, avec de surcroît une propriété de robustesse [37]. Le problème demeure nonconvexe et non lisse, mais αε (avec ε > 0 fixé) est plus régulière que α : à conditionque les valeurs propres λ de Ac(K) telles que Reλ = α(Ac(K)) (valeurs propres diteactives) soient non dérogatoires4, l’abscisse pseudo-spectrale αε est localement lipschit-zienne en Ac(K) (voir [37]). Ce résultat permet d’employer directement des algorithmesd’optimisation non différentiable de type faisceau [80]. Les évaluations de αε(Ac(K)) ou deβ(Ac(K)) sont toutefois coûteuses en temps de calcul : les méthodes numériques proposéesdans [38, 99] s’appuient, comme pour la norme H∞ (voir [28]), sur des calculs répétés devaleurs propres de matrices hamiltoniennes. Pour l’abscisse spectrale α(Ac(K)), un simplecalcul de valeurs propres suffit.
1.2.3 Synthèse H∞Etant donné un système LTI sous forme standard (1.33), le problème H∞ consiste à
rechercher une loi de commande par retour de sortie U(s) = K(s)Y (s), qui stabilise laboucle fermée et minimise la norme H∞ du transfert Tw→z(K) :
minK(s) stabilise (1.33)
‖Tw→z(K)‖∞ . (1.63)
Rappelons que la norme H∞ est la norme induite sur l’espace des matrices de trans-fert stables par la norme de signal L2 (qui mesure l’énergie). Le but recherché est ainside réduire le plus possible l’effet des entrées exogènes w sur les sorties régulées z. Leproblème d’optimisation (1.63) n’est pas convexe, du fait que la transformation linéairefractionnaire K 7→ Tw→z(K) n’est pas linéaire. Il est de plus non lisse, car la normeH∞ cache un double maximum portant sur les valeurs singulières σi(Tw→z(K, jω)), eni ∈ 1, 2, . . . ,min(m1, p1) et en ω ∈ [0,∞].
Il existe essentiellement deux approches pour résoudre le problème H∞. Elles ont encommun de s’appuyer sur des caractérisations de l’ensemble des correcteurs stabilisants γ-sous-optimaux, c’est-à-dire tels que ‖Tw→z(K)‖∞ < γ pour une performance γ > 0 fixée.La plus classique s’appuie sur des équations algébriques de Riccati ; publiée en 1989 dans[47] et rappelée ci-après, elle est souvent désignée par les initiales DGKF, formées à partirdes noms des quatre auteurs (Doyle, Glover, Khargonekar et Francis). La seconde, plusrécente (Gahinet et Apkarian, 1994 [55]), utilise des inégalités linéaires matricielles. Lescorrecteurs synthétisés par ces deux approches sont généralement d’ordre plein, et doncpeu adaptés à une implémentation directe. Ceci d’autant plus que l’ordre du systèmemis sous forme standard (1.33) est souvent supérieur à l’ordre du système à commander,car la forme standard peut inclure des matrices de pondération dynamique destinées à
4Une valeur propre λ ∈ Λ(X) est dite non dérogatoire si le sous-espace propre associé à λ est dedimension 1, ou, de façon équivalente, si le bloc associé à λ dans la forme de Jordan de X ne comporteque des 1 sur la sur-diagonale.

28 Chapitre 1. Introduction à la commande des systèmes
intégrer les spécifications fréquentielles dans le critère H∞ (loop-shaping). Il est bien sûrpossible de procéder à une réduction d’ordre, soit a priori, directement sur le systèmesous forme standard, soit a posteriori, sur le correcteur H∞ d’ordre plein. Quelle que soitla méthode de réduction de modèle choisie, parmi les nombreuses existantes (troncaturemodale, troncature équilibrée, . . .voir [112] pour un inventaire non exhaustif), l’optimalitéest perdue : rien ne garantit qu’un autre correcteur du même ordre que le correcteur réduitne réalise pas localement une meilleur performance.
Equations de Riccati
L’approche DGKF de [47] offre, sous certaines hypothèses, une caractérisation et uneparamétrisation en espace d’état de l’ensemble des correcteurs γ-sous-optimaux pour leproblème H∞, c’est-à-dire tels que, étant donnée une performance γ > 0,
K stabilise (1.33) de manière interne et ‖Tw→z(K)‖∞ < γ (1.64)
Les conditions de validité de cette première approche sont les suivantes :
(i) (A,B2) est stabilisable et (C2, A) est détectable,(ii) D12 et D21 sont de plein rang,(iii) P12 et P21 (transferts partiels définis par 1.31) n’ont pas de zéro sur l’axe imaginaire,
(iv) DT12
[C1 D12
]=[0 I
]et[B1D21
]DT
21 =[0I
],
(v) D11 = 0 et D22 = 0.
Il est possible de satisfaire les hypothèses (iv) et (v), dites de normalisation, par deschangements de variables. Les manipulations, dont une partie a déjà été évoquée en (1.37)et (1.38) pour annulerD22, sont détaillées dans [125]. Notons cependant qu’il est nécessairede supposer (ii) afin de pouvoir se ramener à D21D
T21 = I et DT
12D12 = I. (ii) et (iii) sontdes hypothèses de régularité du système. Enfin, (i) est une condition nécessaire et suffisantepour la stabilisabilité du système par un correcteur d’ordre plein.
Théorème 1.2.2 Etant donné γ > 0, et sous les hypothèses (i)-(v), le système (1.33)admet un correcteur γ-sous-optimal pour le problème H∞ (1.64) si et seulement si il existedes solutions stabilisantes X∞, Y∞ ∈ Sn(R) aux deux équations algébriques de Riccatisuivantes :
ATX∞ +X∞A+X∞(γ−2B1BT1 −B2B
T2 )X∞ + CT
1 C1 = 0, (1.65)AY∞ + Y∞AT + Y∞(γ−2CT
1 C1 − CT2 C2)Y∞ +B1B
T1 = 0, (1.66)
et si, de plus, ces solutions vérifient
X∞ 0, Y∞ 0, ρ(X∞Y∞) < γ2. (1.67)

1.2. Problèmes de synthèse pour la commande 29
Une réalisation d’un correcteur γ-sous-optimal particulier (appelé correcteur central) estalors donnée par
AK = A+ (γ−2B1BT1 −B2B
T2 )X∞ − (I − γ−2Y∞X∞)−1Y∞CT
2 C2
BK = (I − γ−2Y∞X∞)−1Y∞CT2
CK = −BT2 X∞
DK = 0 .
(1.68)
Cette caractérisation permet, en procédant par dichotomie sur γ, de trouver un en-cadrement du gain H∞-optimal γopt, et ceci à la précision souhaitée : c’est l’algorithmede γ-itération. Le correcteur central (strictement propre et d’ordre plein) est reconstruitavec (1.68).
Notons d’après [47] que l’ensemble des correcteurs γ-sous-optimaux K∞, réalisant uneperformance ‖Tw→z(K∞)‖ < γ, est entièrement décrit sous la forme d’une LFT danslaquelle intervient un paramètre Q(s).
K∞(s)
K0(s)
w z
yu
Q(s)
P (s)
Fig. 1.2 – Paramétrisation des correcteurs sous-optimaux K∞.
Le bloc K0 est basé sur le correcteur central (1.68), augmenté de la façon suivante :
K0(s) =
AK BK (I − γ−2Y∞X∞)−1B2CK DK I−C2 I 0
. (1.69)
Le paramètre Q(s), qui doit être choisi stable et tel que ‖Q‖∞ < γ, permet de jouersur la nature du correcteur H∞ : il est ainsi possible, comme indiqué dans [90], de choisirQ de façon à former un correcteur H∞ d’ordre nK = n − p2. En dehors de quelques casparticuliers cependant, la façon dont le paramètre Q modifie l’ordre ou la structure ducorrecteur H∞ n’est pas maîtrisée. Dans le cas de l’ordre réduit, seules des conditions

30 Chapitre 1. Introduction à la commande des systèmes
suffisantes ont été proposées [63]. Elles font apparaître des équations de Riccati modifiéeset couplées, résolues par des algorithmes de continuation homotopique.
Ainsi, le problème H∞ se prête bien à une résolution par équations de Riccati dans lecas de la synthèse d’ordre plein, sans structure particulière sur le correcteur. L’approcheest cependant limitée par les hypothèses de régularité (ii) et (iii), ainsi que par l’ordrepotentiellement élevé du correcteur central, à défaut de savoir exploiter la diversité descorrecteurs H∞. La formulation du problème H∞ par des inégalités matricielles permetde lever certaines de ces limitations.
Inégalités linéaires matricielles
La caractérisation des correcteurs H∞ sous-optimaux par des inégalités matriciellesrepose sur le lemme borné-réel [4], qui est au critère H∞ ce que le théorème de Lyapunov(Théorème 1.1.1) est à la stabilité interne :
Lemme 1.2.3 Le système LTI défini par la réalisation (A,B,C,D) est stable de manièreinterne et vérifie la condition de performance
∥∥∥C(sI − A)−1B +D∥∥∥∞ < γ (1.70)
si et seulement si il existe une matrice X ∈ Sn(R), X 0, telle queATX +XA XB CT
BTX −γI DT
C D −γI
≺ 0 . (1.71)
L’application du lemme borné-réel à la réalisation(Ac(K), Bc(K), Cc(K), Dc(K)
), qui
décrit la boucle fermée sous forme standard ((1.41), page 22) donne ainsi une caractérisa-tion des correcteurs H∞ sous-optimaux par une inégalité matricielle en X ∈ Sn+nK (R) etK ∈ R(nK+m2)×(nK+p2). Les hypothèses sont ici beaucoup plus faibles que pour l’approcheDGKF, puisqu’on supposera seulement :(i) (A,B2) est stabilisable et (C2, A) est détectable,(ii) D22 = 0.Ainsi le problème de synthèse H∞ se ramène à un problème de programmation semi-
définie (SDP), dont l’objet est de minimiser le critère γ sous les contraintes matricielles(A+B2KC2)TX +X(A+B2KC2) X(B1 +B2KD21) (C1 +D12KC2)T
(B1 +B2KD21)TX −γI (D11 +D12KD21)TC1 +D12KC2 D11 +D12KD21 −γI
≺ 0 ,
(1.72)P 0 , (1.73)
où les matrices A, B1, B2, C1, C2, D11, D12, D21 et K sont augmentées conformémentà (1.43)-(1.44), dans le cas d’un retour dynamique (nK > 0). Bien que le critère soitlinéaire, la nature des contraintes (une BMI) rend le problème non convexe en (K,X, γ).

1.2. Problèmes de synthèse pour la commande 31
On trouvera dans la thèse [133] (ainsi que dans les références qui y figurent) un état deslieux concernant les techniques de résolution actuelles de tels problèmes (points intérieurs,optimisation non lisse, branch-and-bound, descente coordonnée), ainsi que la présentationde plusieurs méthodes originales (dont une de type Lagrangien augmenté).
Comme pour la stabilité (Théorème 1.2.1, page 25), il est cependant possible de rame-ner la BMI (1.72) à un système de deux LMI couplées par une contrainte non linéaire. Parune série de manipulations algébriques introduites dans [55] (incluant des projections dulemme borné-réel), la variable K du correcteur disparaît, et l’on aboutit à une nouvellecaractérisation des solution du problème H∞ sous-optimal.
Théorème 1.2.4 Etant donné γ > 0, et sous les hypothèses (i)-(ii), le système (1.33)admet un correcteur γ-sous-optimal pour le problème H∞ (1.64) si et seulement si ilexiste des matrices X, Y ∈ Sn+nK (R) vérifiant les LMI
[W[BT2 DT12] 0
0 I
]TAX +XAT XCT
1 B1C1X −γI D11BT
1 DT11 −γI
[W[BT2 DT12] 0
0 I
]≺ 0 , (1.74)
[W[C2 D21] 0
0 I
]TATY + Y A Y B1 CT
1BT
1 Y −γI DT11
C1 D11 −γI
[W[C2 D21] 0
0 I
]≺ 0 , (1.75)
[X II Y
] 0 , (1.76)
oùW[BT2 DT12] etW[C2 D21] sont des matrices dont les colonnes forment des bases des noyauxde [BT
2 DT12] et de [C2 D21].
L’ensemble des correcteurs γ-sous-optimaux contient des correcteurs d’ordre nK < nsi et seulement si les matrices X et Y vérifient de plus la contrainte de rang
rang (I −XY ) ≤ nK . (1.77)
Grâce au théorème 1.2.4, la synthèse H∞ par correcteur d’ordre plein est accessibleen minimisant γ sous les contraintes LMI (1.74)-(1.76). C’est un problème d’optimisationsemi-définie convexe, pour lequel les méthodes de points intérieurs sont efficaces. Le cas del’ordre réduit ajoute la contrainte de rang non convexe (1.77) (et celle-ci devient XY = Idans le cas d’un correcteur statique) ; les méthodes de type Lagrangien augmenté partiel,précédemment citées pour la stabilisation (page 26), sont encore applicables ici. D’autrepart, une approche dite spectral quadratic-SDP est proposée dans [14] pour résoudre lesproblèmes de ce type (minimisation d’un critère linéaire sous contraintes LMI et égaliténon linéaire).
Dans tous les cas, une fois calculée une solution (X, Y ) de (1.74)-(1.76) (et éventuel-lement (1.77)), associée à un niveau de performance γ, un correcteur γ-sous-optimal Kest reconstruit notamment comme solution d’une nouvelle LMI [55]. De plus, il est pos-sible d’imposer des conditions supplémentaires sur X et Y afin de garantir au correcteurreconstruit certaines propriétés. Il est ainsi possible de fixer un majorant sur son ordre,

32 Chapitre 1. Introduction à la commande des systèmes
c’est l’objet de la contrainte (1.77). Une contrainte sur le degré de stabilité5 de la ma-trice Ac(K) peut également être posée via deux LMI additionnelles en (X,Y ) (qui nesont toutefois que des conditions nécessaires), ceci afin d’éviter la simplification pôle/zéroentre le système et le correcteur, comme illustré dans [55]. La diversité et la lisibilité dessolutions (X, Y ) offre ainsi une flexibilité dans la synthèse H∞ que ne permettait pasl’approche DGKF. Enfin, notons que les inégalités matricielles permettent de s’affranchirdes hypothèses de régularité.
Optimisation non lisse
Des techniques d’optimisation non lisse (exploitant le ε-sous-différentiel dans le casnon convexe) ont été appliquées avec succès pour résoudre les problèmes d’optimisationsemi-définie avec contraintes de type BMI dans la thèse [133] déjà citée. Plus récemment,une technique de région de confiance appliquée à la résolution de problèmes quadratiqueslocaux sous contraintes SDP a été proposée [11]. De telles approches permettent a prioride résoudre le problème H∞, qui se formule sans perte de généralité dans ce cadre grâceau lemme borné-réel (Lemme 1.2.3) (retour d’état, de sortie, correcteur statique, d’ordreréduit, ou d’ordre plein). La dimension de l’espace de recherche devient cependant vitetrès importante pour des systèmes complexes, en raison de la présence de la variable deLyapunov (1
2(n + nK)(n + nK + 1) variable réelles indépendantes) en plus du correcteur((nK +m2)(nK + p2) variables) et du scalaire γ.
Quitte à faire intervenir des techniques non lisses, pourquoi ne pas les appliquer direc-tement au problème H∞ originel (1.63), qui est lui-même non lisse comme nous l’avonsdéjà souligné ? Cette approche directe, qui fonde les travaux développés dans cette thèse,peut être exploitée pour résoudre des problème de stabilisation (travaux de Burke, Lewiset Overton précédemment cités, et nouvel algorithme présenté au chapitre 3). Dans le casde la synthèse H∞, les travaux récents présentés dans [8, 9, 7] et dans [94, 32] montrentclairement les bénéfices à tirer :
– la dimension de l’espace de recherche est réduite au nombre de paramètres du cor-recteur ; elle est indépendante de l’ordre du système à commander,
– la lisibilité des variables de décision fait qu’il devient aisé d’imposer des contraintesau correcteur ; en pratique, il suffira de disposer d’une paramétrisation différen-tiable κ 7→ K(κ) du correcteur pour fixer la structure souhaitée (ordre réduit,Proportionnel-Intégral-Dérivé ou PID, commande décentralisée, . . .),
– bien que le problème de synthèse H∞ soit non lisse et non convexe, les algorithmesd’optimisation non différentiable donnent, sous certaines hypothèses vérifiées enpratique, un certificat de convergence qui garantit l’optimalité locale du correcteurobtenu.
Nous rappelons dans le chapitre suivant les éléments d’optimisation non lisse qui per-mettront de développer en détail ces points forts dans la deuxième partie de ce document.
5Le degré de stabilité de la matrice d’état A d’un système LTI est défini parλsd(A) , −max Reλi(A) = −α(A).

Chapitre 2
Optimisation non lisse
Je me détourne avec effroi et horreur decette plaie lamentable des fonctionscontinues qui n’ont point de dérivées.
Charles Hermite (1822-1901),cité par F. H. Clarke [44].
2.1 Terminologie et définitionsNous adoptons ici les notations habituelles et générales de l’Analyse et de l’Optimi-
sation non lisse. En particulier, les variables et symboles choisis ne font jamais référence,dans ce chapitre, aux notions relatives aux systèmes dynamiques et à la commande pré-cédemment présentés.
Nous avons choisi une présentation didactique des notions d’analyse non lisse : nouscommençons par quelques pré-requis, puis nous introduisons le sous-différentiel dans lecas des fonctions convexes, pour lesquelles la généralisation du gradient est assez intuitive.Nous présentons ensuite le sous-différentiel de Clarke, à partir des dérivées directionnellesgénéralisées. Le principe général des méthodes de faisceaux est exposé. Enfin, nous décri-vons des méthodes d’optimisation non lisse spécifiques aux problèmes minimax, du typede ceux rencontrés dans les problèmes de commande.
2.1.1 Ingrédients pour l’analyse non lisseL’espace Rn est muni du produit scalaire euclidien 〈x, y〉 = xTy. La norme associée est
notée ‖.‖. B(x, r) désigne la boule (ouverte) de centre x ∈ Rn et de rayon r > 0, définiepar
B(x, r) , y ∈ Rn : ‖y − x‖ < r .Afin de bien distinguer les composantes d’un vecteur x ∈ Rn dans la base canonique
d’une part, et les termes d’une suite (xi)i∈I (I fini ou non) d’éléments de Rn d’autre part,on notera les composantes xj et les termes xi. Ainsi xji désigne la j-ème composante dui-ème terme d’une suite.
33

34 Chapitre 2. Optimisation non lisse
Nous ne rappelons pas ici les notions fondamentales du calcul différentiel (différentia-bilité au sens de Fréchet, au sens de Gâteaux, gradient, fonctions de classe Cn), mais nousfixons les quelques définitions supplémentaires indispensables à une généralisation de cesnotions.
Définition 2.1.1 Un ensemble C ⊂ Rn est dit convexe si, pour tout x, y ∈ C et pourtout réel λ ∈ [0, 1], on a λx+ (1− λ)y ∈ C.
On note [x, y] , z ∈ Rn : z = λx+(1−λ)y et 0 ≤ λ ≤ 1 le segment fermé d’extrémitésx et y.
Pour tout k ∈ N∗, Σk désigne le simplexe unité de Rk, défini par
Σk , τ ∈ Rk :k∑
i=1τ i = 1 et τ i ≥ 0 pour tout 1 ≤ i ≤ k . (2.1)
Si C ⊂ Rn est convexe, et si (x1, . . . , xk) ∈ Ck, alors toute combinaison linéaire convexede la forme ∑k
i=1 τixi (avec τ ∈ Σk) est encore dans C.
Toute intersection de convexes est encore convexe. Etant donnée un ensemble S ∈ Rn,on appelle enveloppe convexe de S et on note coS l’intersection de tous les convexescontenant S, c’est-à-dire le plus petit convexe contenant S. Il est décrit par toutes lescombinaisons linéaires convexes d’éléments de S :
coS = x ∈ Rn : x =k∑
i=1τ ixi, τ ∈ Σk, xi ∈ S, 1 ≤ i ≤ k, k ≥ 1 . (2.2)
Définition 2.1.2 Soit C ⊂ Rn un ensemble convexe, s ∈ Rn et x ∈ C. La direction s estdite normale à C en x si
〈s, y − x〉 ≤ 0 pour tout y ∈ C. (2.3)
L’ensemble de ces directions s forme le cône normal à C en x, noté NC(x).
Définition 2.1.3 Une fonction f : Rn → R est dite convexe si, pour tout x, y ∈ Rn etpour tout réel λ ∈ [0, 1], on a
f(λx+ (1− λ)y) ≤ λf(x) + (1− λ)f(y) . (2.4)
Si l’inégalité (2.4) est stricte pour tout x, y ∈ Rn tels que x 6= y, et pour tout λ ∈]0, 1[,f est dite strictement convexe.
Une fonction f : Rn → R est convexe si et seulement si son épigraphe
Epi (f) ,[xs
]∈ Rn+1 : s ≥ f(x)
est une partie convexe de Rn+1. Enfin, toute fonction convexe est continue sur Rn.

2.1. Terminologie et définitions 35
Définition 2.1.4 Une fonction f : Rn → R est dite lipschitzienne sur S ⊂ Rn s’il existeune constante L > 0 telle que, pour tout y, z ∈ S
|f(y)− f(z)| ≤ L ‖y − z‖ (2.5)
f est dite localement lipschitzienne en x ∈ Rn s’il existe un réel positif ε > 0 tel que f estlipschitzienne sur B(x, ε).
Si f est lipschitzienne sur S (resp. localement lipschitzienne en x), toute valeur de Lqui vérifie l’inégalité (2.5) de la définition 2.1.4 est appelée constante de Lipschitz de fsur S (resp. en x, ou au voisinage de x).
Le caractère localement lipschitzien d’une fonction en x assure que son taux d’accrois-sement peut être contrôlé dans un voisinage de x. Une fonction localement lipschitzienneen un point n’est pas nécessairement différentiable en ce point (par exemple x 7→ |x|en 0). Enfin, on peut montrer que toute fonction convexe f : Rn → R est localementlipschitzienne en tout point de Rn (et donc que f est lipschitzienne sur tout compact deRn).
Terminons par la notion de dérivée directionnelle :
Définition 2.1.5 Une fonction f : Rn → R admet une dérivée directionnelle (unilatérale)en x ∈ Rn dans la direction d ∈ Rn si la limite
limt→0t>0
f(x+ td)− f(x)t
(2.6)
existe et est finie. On la note alors f ′(x, d).
Si f est différentiable en x (au sens de Fréchet ou au sens de Gâteaux), alors elle admetdes dérivées directionnelles dans toutes les directions d, et on a f ′(x, d) = f ′(x)(d) =∇f(x)Td. Rappelons que la réciproque n’est pas vraie en général, sauf si les dérivéesdirectionnelles sont continues.
Définition 2.1.6 Une fonction σ : Rn → R est dite sous-linéaire si, par définition, elleest convexe et positivement homogène, c’est-à-dire
σ(tx) = tσ(x) pour tout x ∈ Rn et t > 0 . (2.7)
On montre facilement que, dans cette définition, l’hypothèse de convexité peut être rem-placée par la sous-additivité de σ :
σ(x+ y) ≤ σ(x) + σ(y) pour tout x, y ∈ Rn (2.8)
Ainsi une fonction sous-linéaire est une fonction sous-additive et positivement homogène.Toute fonction sous-linéaire possède la propriété fondamentale de majorer au moins
une fonction linéaire, ce qui permet d’énoncer le théorème suivant :

36 Chapitre 2. Optimisation non lisse
Théorème 2.1.7 Soit σ : Rn → R une fonction sous-linéaire. Alors l’ensemble
Sσ , s ∈ Rn : 〈s, x〉 ≤ σ(x) pour tout x ∈ Rn (2.9)
est non vide. Il est de plus compact et convexe. On a enfin la relation
σ(x) = sup 〈s, x〉 : s ∈ Sσ . (2.10)
Réciproquement, étant donné un ensemble S non vide, compact et convexe, la fonctionsupport σS : Rn → R de S, définie par
σS(x) , sup 〈s, x〉 : s ∈ S , (2.11)
est sous-linéaire.
Le théorème précédent permet ainsi d’établir une bijection entre l’ensemble des partiesnon vides, compactes et convexes de Rn d’une part, et l’ensemble des applications sous-linéaires Rn → R d’autre part.
2.1.2 Analyse non lisse : le cas convexeSous-différentiel d’une fonction convexe
L’analyse convexe permet de généraliser assez naturellement la notion de différentielle,en introduisant de nouveaux objets (sous-différentiel et sous-gradient), définis pour lesfonctions convexes sur Rn (donc pas nécessairement différentiables). Nous en donnonsici les principales étapes, et nous invitons le lecteur à se référer à l’ouvrage [68], quipropose une approche très pédagogique de l’analyse convexe, ainsi qu’à [121], référenceen la matière.
Dans toute la section 2.1.2, f : Rn → R désigne une fonction convexe.
Théorème 2.1.8 Pour tout x ∈ Rn, f admet des dérivées directionnelles dans toutes lesdirections d ∈ Rn, et on a
f ′(x, d) = inft>0
f(x+ td)− f(x)t
. (2.12)
De plus, pour tout x fixé, l’application d ∈ Rn 7→ f ′(x, d) est sous-linéaire.
Remarquons que toute constante locale de Lipschitz L de f en x est encore uneconstante de Lipschitz de d ∈ Rn 7→ f ′(x, d), et ce de façon globale. On a en particu-lier
|f ′(x, d)| ≤ L‖d‖ (2.13)
Le théorème 2.1.7 permet donc de considérer d ∈ Rn 7→ f ′(x, d) comme la fonctionsupport d’un ensemble non vide, compact et convexe de Rn, défini comme suit :

2.1. Terminologie et définitions 37
Définition 2.1.9 Le sous-différentiel de f en x, noté ∂cf(x) (avec c pour convexe), estl’ensemble non vide, compact et convexe de Rn dont la fonction support est d ∈ Rn 7→f ′(x, d), c’est-à-dire
∂cf(x) , s ∈ Rn : 〈s, d〉 ≤ f ′(x, d) pour tout d ∈ Rn . (2.14)
Les éléments de ∂cf(x) sont appelés les sous-gradients de f en x.
De plus, connaissant ∂cf(x), il est immédiat de retrouver n’importe quelle dérivée direc-tionnelle :
f ′(x, d) = max 〈s, d〉 : s ∈ ∂cf(x) . (2.15)
Enfin, on a ∂cf(x) ⊂ B(0, L), avec (2.13).
Interprétation géométrique
Le théorème suivant donne une caractérisation du sous différentiel qui ne fait pas appelaux dérivées directionnelles, mais plutôt à la notion de minoration par une fonction affine :
Théorème 2.1.10 Pour tout x ∈ Rn, on a l’égalité suivante
∂cf(x) = s ∈ Rn : f(y) ≥ f(x) + 〈s, y − x〉 pour tout y ∈ Rn . (2.16)
Cette description du sous-différentiel s’interprète bien en termes géométriques, dansRn+1 : s ∈ ∂cf(x) si et seulement si [ s
−1 ] est dans le cône normal à l’épigraphe de fen [ x
f(x) ]. La figure 2.1 illustre cette interprétation dans le cas d’une fonction convexedéfinie sur R ; le cône tangent à Epi (f) en [ x
f(x) ] est représenté par des flèches en traitpointillé, le cône normal par des flèches en trait continu. Un vecteur [ s
−1 ] du cône normalest représenté en gras.

38 Chapitre 2. Optimisation non lisse
x+ ∂cf(x)
x x+ s
f(x)
Epi (f)
f(x)− 1
Fig. 2.1 – Interprétation géométrique du sous-différentiel dans le cas convexe.
Cas différentiable
Théorème 2.1.11 Si f convexe est différentiable en x, alors ∂cf(x) est réduit au single-ton ∇f(x). Réciproquement, si f est convexe et ∂cf(x) = s, alors f est différentiableen x et s = ∇f(x).
Nous n’avons volontairement pas indiqué le type de différentiabilité de f en x, carcelle au sens de Fréchet et celle au sens de Gâteaux coïncident dans le cas des fonctionslocalement lipschitziennes, donc en particulier pour les fonctions convexes.
2.1.3 Analyse non lisse : le cas lipschitizienSous-différentiel de Clarke
f : Rn → R est maintenant supposée localement lipschitzienne en x ∈ Rn, de constantede Lipschitz L, et ce dans toute la section 2.1.3. L’hypothèse n’est pas suffisante pourparler de dérivées directionnelles de f , contrairement au cas convexe. Clarke [44], dont

2.1. Terminologie et définitions 39
notre présentation reprend ici les principaux résultats, définit la dérivée directionnellegénéralisée de la façon suivante :
Définition 2.1.12 Pour tout d ∈ Rn, la fonction f admet une dérivée directionnellegénéralisée en x dans la direction d, notée f (x, d), et définie par
f (x, d) , lim supy→xt→0t>0
f(y + td)− f(y)t
. (2.17)
Puisque f est localement lipschitzienne en x ∈ Rn, f (x, d) est finie, et
|f (x, d)| ≤ L‖d‖ . (2.18)
Comme dans le cas convexe, l’application d 7→ f (x, d) hérite du caractère localementlipschitzien de f , de constante L, et celui-ci est même global. On montre de même qued 7→ f (x, d) est sous-linéaire, de sorte qu’il est permis de définir, de façon analogue à ladéfinition 2.1.9, un sous-différentiel pour les fonctions localement lipschitziennes :
Définition 2.1.13 Le sous-différentiel de Clarke de f en x, noté ∂f(x) est l’ensemblenon vide, compact et convexe de Rn dont la fonction support est d ∈ Rn 7→ f (x, d),c’est-à-dire
∂f(x) , s ∈ Rn : 〈s, d〉 ≤ f (x, d) pour tout d ∈ Rn . (2.19)
Les éléments de ∂f(x) sont appelés les sous-gradients de Clarke (ou gradients généralisés)de f en x.
On a ∂f(x) ⊂ B(0, L), d’après (2.18). Les dérivées directionnelles généralisées sedéduisent de ∂f(x) pour toute direction d ∈ Rn :
f (x, d) = max 〈s, d〉 : s ∈ ∂f(x) . (2.20)
Le sous-différentiel de Clarke ∂f(x) s’interprète géométriquement dans Rn+1 (voirfigure 2.2), à condition toutefois de généraliser la notion de cône normal à une partiequelconque C 6= ∅ (pas nécessairement convexe). Nous invitons le lecteur à se reporterà [44], où est défini le cône tangent à C en un point x ∈ C, puis, par polarité, le cônenormal à C en x. Ces définitions posées, on montre que ∂f(x) est l’ensemble des vecteurss ∈ Rn tels que [ s
−1 ] est dans le cône normal à l’épigraphe de f en [ xf(x) ].

40 Chapitre 2. Optimisation non lisse
Epi (f)
f(x)
xx+ s
f(x)− 1
x+ ∂f(x)
Fig. 2.2 – Interprétation géométrique du sous-différentiel de Clarke.
Cas convexe, cas différentiable
Ces objets généralisent ceux introduits à la section 2.1.2. En effet, si f est convexe, ona f (x, d) = f ′(x, d) pour tout d ∈ Rn, et par suite ∂f(x) = ∂cf(x).
Le lien avec le cas différentiable est moins évident que dans le cas convexe : si f ,toujours supposée localement lipschitzienne en x, est (Fréchet- ou Gâteaux-) différentiableen x, alors on a f ′(x, d) = 〈∇f(x), d〉 ≤ f (x, d) pour tout d ∈ Rn, et donc∇f(x) ∈ ∂f(x).
Si on suppose maintenant que f est continûment différentiable en x (f est donc enparticulier localement lipschitzienne en x), on a l’égalité 〈∇f(x), d〉 = f (x, d) pour toutd ∈ Rn, par définition de la dérivée directionnelle généralisée. Ainsi d 7→ f (x, d) est elle-même linéaire, et ne peut être minorée sur Rn par une autre application linéaire. D’aprèsla définition 2.1.13, on a donc ∂f(x) = ∇f(x).

2.1. Terminologie et définitions 41
Caractérisation du sous-différentiel de Clarke
Si une fonction localement lipschitzienne n’est pas nécessairement différentiable, l’en-semble de ses points de non-différentiabilité est néanmoins de mesure nulle, comme l’af-firme le théorème suivant, dû à Rademacher :
Théorème 2.1.14 Soit U ⊂ Rn un ouvert, et g : U → R une fonction localement lip-schitzienne en tout point de U . Alors g est différentiable presque-partout sur Rn (pour lamesure de Lebesgue).
Toute fonction f : Rn → R localement lipschitzienne sur Rn est donc différentiable par-tout, sauf sur Ωns, un ensemble de mesure nulle. f admet donc un gradient ∇f(x) enun point x arbitrairement proche de xns ∈ Ωns. On a d’autre part la caractérisation dusous-différentiel de Clarke suivante :
Théorème 2.1.15 Si f : Rn → R est localement lipschitzienne sur Rn, différentiable surRn \ Ωns, avec Ωns Lebesgue-négligeable, alors
∂f(x) = co s ∈ Rn : il existe (xi) ⊂ Rn \ Ωns telle que xi → x et ∇f(xi)→ s .(2.21)
Cette nouvelle description permet une construction effective et exhaustive du sous-diffé-rentiel de Clarke, dès que l’on sait calculer les gradients là où cela est possible (c’est-à-direpresque-partout). Elle reste bien sûr valide dans le cas convexe.
Règles de calcul
Nous donnons ici quelques règles de calcul utiles du sous-différentiel de Clarke. Lesrésultats ne sont souvent que des inclusions, mais il est possible d’obtenir des égalités endemandant une régularité plus forte que le caractère localement lipschitzien, dite régularitéau sens de Clarke :
Définition 2.1.16 f : Rn → R localement lipschitzienne en x est dite régulière au sens deClarke si elle admet des dérivées directionnelles f ′(x, d) dans toutes les directions d ∈ Rn,et si, de plus, on a f ′(x, d) = f (x, d) pour tout d ∈ Rn.En particulier, toute fonction convexe sur Rn et toute fonction continûment différentiableen x est régulière au sens de Clarke en x.
D’autre part, si f est régulière au sens de Clarke et différentiable en x, alors ∂f(x) =∇f(x), ce qui précise le résultat annoncé précédemment.
Proposition 2.1.17 Soit (fi)1≤i≤p une famille finie de fonctions définies sur Rn, à va-leurs réelles, et localement lipschitziennes en x ∈ Rn, et soit (τi)1≤i≤p ⊂ R. Alors lasomme pondérée ∑ τifi est encore localement lipschitzienne en x, et on a
∂
( p∑
i=1τifi
)(x) ⊂
p∑
i=1τi∂fi(x) . (2.22)
On a égalité si une fonction fi au plus n’est pas continûment différentiable en x. On aencore égalité si les fi sont régulières au sens de Clarke, et si τi ≥ 0 pour tout i.

42 Chapitre 2. Optimisation non lisse
Précisons que le second membre de (2.22) contient toutes les sommes de la forme∑τisi, où si ∈ ∂fi(x).
Proposition 2.1.18 (Règle de différentiation en chaîne)Soit F : Rn → Rm une fonction continûment différentiable en x ∈ Rn, et g : Rm → Rune fonction localement lipschitzienne en F (x). Alors la composée g F est localementlipschitzienne en x, et on a
∂(g F )(x) ⊂ ∂g (F (x)) F ′(x), (2.23)
où F ′(x) désigne la différentielle de F en x. On a égalité si g est régulière au sens deClarke en F (x), et, dans ce cas, la composée g F est aussi régulière au sens de Clarkeen x.
Le second membre de (2.23) désigne l’ensemble des formes linéaires sur Rn de la formed 7→ 〈s, F ′(x).d〉, où s décrit ∂g (F (x)). On le note encore [F ′(x)]? ∂g (F (x)), commeaction de l’application linéaire adjointe [F ′(x)]? sur le sous-différentiel.
Proposition 2.1.19 Soit (fi)1≤i≤p une famille finie de fonctions définies sur Rn, à va-leurs réelles, et localement lipschitziennes en x ∈ Rn. Alors le maximum point par pointmaxi fi est encore localement lipschitzien en x ∈ Rn, et on a
∂(
max1≤i≤p
fi
)(x) ⊂ co ∂fj(x) : j ∈ J (x) , (2.24)
où J (x) désigne l’ensemble des indices j actifs en x, tels que fj(x) = maxi fi(x). On aégalité si, pour tout j ∈ J (x), les fj sont régulières au sens de Clarke en x, et dans cecas maxi fi est elle-même régulière au sens de Clarke en x.
Cette dernière règle est fondamentale, car elle permet d’obtenir tous les sous gradientsd’une fonction définie comme le maximum point par point d’une famille de fonctionscontinûment différentiables. De telles fonctions apparaissent souvent en pratique, lors-qu’un ensemble (fini ou non) de spécifications exprimées par des inégalités doivent êtrevérifiées. La minimisation de ces fonctions forme la familles des problèmes dits minimax,sur lesquels nous reviendrons à la section 2.3.3.
2.2 Conditions d’optimalitéNous montrons dans cette section en quoi les éléments qui viennent d’être présentés
forment un cadre théorique adapté à la résolution de problèmes d’optimisation.Considérons le problème d’optimisation
minx∈Rn
f(x) , (2.25)
où f : Rn → R est supposée localement lipschitzienne en tout point x ∈ Rn. Il s’agit d’unproblème non lisse, puisque f n’est pas nécessairement différentiable sur Rn en entier.Rappelons qu’une solution de (2.25), si elle existe, peut être globale, ou seulement locale :

2.3. Algorithmes pour l’optimisation non lisse 43
Définition 2.2.1 Un point x∗ ∈ Rn est un minimum global de f sur Rn si, pour toutx ∈ Rn, f(x∗) ≤ f(x).
Un point x∗ ∈ Rn est un minimum local de f s’il existe ε > 0 tel que, pour toutx ∈ B(x∗, ε), f(x∗) ≤ f(x).
Le sous-différentiel de Clarke permet de formuler une condition nécessaire d’optimalitélocale (sans contrainte) pour les fonctions localement lipschitzienne sur R.
Théorème 2.2.2 Si x∗ est un minimum local de f , alors 0 ∈ ∂f(x∗).
Remarque: Si x∗ est un minimum local de f , on a alors
f (x∗, d) = max 〈s, d〉 : s ∈ ∂f(x∗) ≥ 0 (2.26)
puisque 0 ∈ ∂f(x∗).Le théorème 2.2.2 généralise la condition nécessaire d’optimalité locale du premier
ordre des fonctions différentiables (∇f(x∗) = 0). Par analogie, un point x∗ ∈ Rn tel que0 ∈ ∂f(x∗) est appelé un point stationnaire de f .
Dans le cas f convexe, on a une caractérisation des minima de f par le sous-différentiel,et ces minima sont globaux :
Théorème 2.2.3 Si f est convexe, x∗ est un minimum global de f sur Rn si et seulementsi 0 ∈ ∂cf(x∗).
Le théorème de Rademacher pourrait laisser penser que les conditions d’optimalitédes théorèmes 2.2.2 et 2.2.3 ont un faible intérêt pratique, puisqu’il y a peu de chancesde “tomber” sur un point x où f n’est pas différentiable. C’est en pratique le contrairequi se produit : un minimum est souvent atteint en un point où la différentiabilité estperdue, et en lequel les conditions d’optimalité pour les fonctions lisses sont évidemmentinapplicables.
2.3 Algorithmes pour l’optimisation non lisse2.3.1 Direction de descente
En optimisation non lisse comme en optimisation différentiable, la recherche pratiquedes minima locaux se fait rarement par la résolution directe des conditions d’optima-lité, mais utilise des méthodes itératives pour construire une suite d’itérés (xk)k∈N ⊂ Rn,qui converge vers un minimum (local ou global) x∗ lorsque k → ∞. Lorsque la suite(f (xk))k∈N ⊂ Rn des valeurs de f correspondantes est strictement décroissante, la mé-thode est dite de descente. C’est généralement le cas des méthodes classiques d’optimisa-tion différentiable sans contrainte (plus profonde descente, méthode de Newton, de quasi-Newton, . . .). Dans le cas général, quelle que soit la régularité de la fonction considérée,on a la définition suivante :

44 Chapitre 2. Optimisation non lisse
Définition 2.3.1 Soit f : Rn → R. On dit que la direction d ∈ Rn est une direction dedescente pour f en x si, par définition, il existe un scalaire ε > 0 tel que
f(x+ td) < f(x) pour tout t ∈]0, ε] . (2.27)
Dans le cas non lisse, on a les caractérisations suivantes :Théorème 2.3.2 Soit f : Rn → R une fonction localement lipschitzienne en x ∈ Rn.d ∈ Rn est une direction de descente pour f en x si l’une des conditions équivalentessuivantes est réalisée :(i) f (x, d) < 0(ii) 〈s, d〉 < 0 pour tout s ∈ ∂f(x)Une direction dite de plus profonde descente est une direction de descente pour laquellela dérivée directionnelle généralisée est la plus négative possible. Etant donné que d 7→f (x, d) est positivement homogène, on peut se ramener au problème normalisé
min‖d‖≤1
f (x, d) , (2.28)
ou, de façon équivalente, àmin‖d‖≤1
maxs∈∂f(x)
〈s, d〉 , (2.29)
dont toute solution d∗ est dite direction normalisée de plus profonde descente. Avec lanorme sur Rn choisie ici (norme euclidienne), on montre que s’il existe une direction dedescente pour f en x, alors la direction de plus profonde descente d∗ est unique (on lanote d∗(x)) ; elle est obtenue à partir du sous-gradient de norme minimale, projection del’origine sur le convexe compact ∂f(x) :
d∗(x) = − s∗(x)‖s∗(x)‖ , où s
∗(x) = arg min ‖s‖ : s ∈ ∂f(x) . (2.30)
Ainsi la recherche d’une direction de plus profonde descente pour une fonction non lissenécessite la résolution d’un programme convexe. Une méthode de descente non lisse ba-sée sur la direction de plus profonde descente a cependant toutes les chances de ne pasconverger vers un point stationnaire de f (voir par exemple [68], dans le cas convexe),en raison d’éventuelles discontinuités de x 7→ d∗(x). En effet, l’application multivaluéex 7→ ∂f(x) ∈ P(Rn) est semi-continue supérieurement 1 (voir [44, Proposition 2.1.5])mais pas inférieurement. Autrement dit, si ∂f(x) ne peut pas grossir brutalement, rien negarantit que ∂f(x0) ne se contracte pas brusquement, et c’est justement ce qui se produiten un point x0 où f est non différentiable : ∂f(x0) n’est pas réduit à un singleton, maistout voisinage de x0 contient un point x où f est différentiable (théorème de Radema-cher 2.1.14) et en lequel ∂f(x) n’est plus qu’un singleton. La direction de plus profondedescente n’est donc pas continue en x0.
1L’application multivaluée F : Rn → P(Rm) est dite semi-continue supérieurement (on trouve parfoissemi-continue extérieurement) si, par définition, pour tout x0 ∈ Rn, F (x0) est fermé et pour tout compactC ⊂ Rm disjoint de F (x0), il existe ρ > 0 tel que, pour tout x ∈ B(x0, ρ), F (x) et C restent disjoints.F est dite semi-continue inférieurement (ou intérieurement) si, par définition, pour tout x0 ∈ Rn, pourtout ouvert O ⊂ Rm qui coupe F (x0), il existe ρ > 0 tel que, pour tout x ∈ B(x0, ρ), F (x) coupe encoreO.

2.3. Algorithmes pour l’optimisation non lisse 45
2.3.2 Méthodes de faisceauxLes méthodes de faisceaux (ou bundle methods) viennent corriger ce défaut de conver-
gence, et sont largement utilisées pour l’optimisation de fonctions non lisses. Elles sontprésentées dans [69] dans le cas convexe, et dans [80] dans le cas localement lipschitzien,et il en existe de nombreuses variantes (voir par exemple [127], et [92] pour une vued’ensemble). Nous n’en donnons ici que les grandes lignes, dans le cas convexe :
Direction de recherche
On suppose qu’à l’itération k ≥ 1, le point courant est xk ∈ Rn, et on dispose d’unefamille finie de points (yj)j∈Ik ⊂ Rn (avec Ik ⊂ 1, . . . , k), constituée au cours desitérations précédentes. On suppose de plus que l’on connaît un sous gradient sj ∈ ∂f(yj)pour tout j ∈ Ik. On définit l’approximation affine par morceaux de f suivante :
fk(x) , maxj∈Ikf(yj) + 〈sj, x− yj〉 , (2.31)
ou encore, en faisant apparaître le point courant xk,
fk(x) = maxj∈Ik
f(xk) + 〈sj, x− xk〉 − αjk
, (2.32)
où le terme αjk est l’erreur de linéarisation, pour tout j ∈ Ikαjk , f(xk)− f(yj)− 〈sj, xk − yj〉 . (2.33)
Comme f est convexe, on a αjk ≥ 0 pour tout j ∈ Ik, et fk(x) ≤ f(x) pour tout x ∈ Rn. Ladirection de recherche dk est ensuite obtenue comme solution du problème de minimisation
mind∈Rn
fk(xk + d) + 1
2 〈d,Gkd〉, (2.34)
où le terme quadratique (avec Gk 0) assure l’existence et l’unicité du minimum, etpénalise le critère si xk + d est trop éloigné de xk. Il agit ainsi comme une contrainte detype région de confiance, permettant de tenir compte du caractère local de fk. Il permetde plus d’inclure une information du second-ordre sur f au voisinage de xk.
Le sous-problème (2.34) est encore non lisse, mais peut facilement se reformuler commele programme quadratique convexe sous contrainte de type inégalité
mind∈Rnv∈R
v + 12 〈d,Gkd〉
tel que 〈sj, d〉 − αjk ≤ v pour tout j ∈ Ik(2.35)
qui est lui-même équivalent, par dualité lagrangienne (voir par exemple [102]), à la re-cherche du multiplicateur τk = (τ jk)j∈Ik solution de
minτk∈ΣIk
∑
j∈Ikτ jkα
jk + 1
2
∑
j∈Ikτ jksj
T
G−1k
∑
j∈Ikτ jksj
, (2.36)

46 Chapitre 2. Optimisation non lisse
où ΣIk désigne le simplexe unité défini par
ΣIk ,(τ jk)j∈Ik :
∑
j∈Ikτ jk = 1 et τ jk ≥ 0 pour tout j ∈ Ik
. (2.37)
La direction de recherche dk solution de (2.35) est reconstruite à partir du multiplica-teur optimal τ ∗k solution de (2.36), comme combinaison convexe :
dk = −∑
j∈Ikτ jkG
−1k sj . (2.38)
Enfin, la décroissance de f attendue (basée sur le modèle fk) est la valeur vk de v, solutiondu problème (2.35). On a
vk = fk(xk + dk)− f(xk)= −∑
j∈Ikτ jkα
jk − 〈dk, Gkdk〉
≤ 0 .
Recherche linéaire
On procède ensuite à une recherche linéaire dans la direction dk, à partir du pointcourant xk. Comme t 7→ f(xk+tdk) est non lisse, il faut recourir à des méthodes adaptées.On suppose fixés les paramètres mL ∈]0, 1
2 [, mR ∈]mL, 1[ et une taille de pas minimalet ∈]0, 1]. On recherche le plus grand pas tL,k ∈ [t, 1] qui réalise la fraction mL de ladécroissance attendue, c’est-à-dire
f(xk + tL,kdk) ≤ f(xk) +mLtL,kvk. (2.39)
La condition (2.39) est à rapprocher de la condition d’Armijo, où vk remplace ici la dérivéedirectionnelle f ′(xk, dk).
Trois situations peuvent se présenter :1. Un tel tL,k existe ; on réalise un long serious step :
xk+1 , xk + tL,kdk et yk+1 , xk+1. (2.40)
2. La condition (2.39) n’est vérifiée pour aucun pas dans [t, 1], mais par tL,k ∈]0, t[ ; onréalise un short serious step :
xk+1 , xk + tL,kdk et yk+1 , xk+1 + tR,kdk. (2.41)
3. La condition (2.39) n’est vérifiée sur [0, 1] que pour tL,k = 0 ; on réalise un null step :
xk+1 , xk et yk+1 , xk+1 + tR,kdk. (2.42)

2.3. Algorithmes pour l’optimisation non lisse 47
Dans les deux derniers cas, tR,k est choisi tel que
tR,k > tL,k et αk+1k+1 + 〈sk+1, dk〉 ≥ mRvK (2.43)
avec sk+1 ∈ ∂f(yk+1), et αk+1k+1 = f(xk+1) − f(yk+1) + 〈sk+1, yk+1 − xk+1〉. La condition
(2.43) garantit que tout nouveau sous-gradient sk+1 ∈ ∂f(yk+1) enrichit l’informationcontenue dans (sj)j∈Ik , car alors xk+1 et yk+1 sont localisés de part et d’autre d’unediscontinuité de x 7→ f ′(x, dk).
Une nouvelle direction de recherche dk+1 est ensuite déterminée, suivie d’une nouvellerecherche linéaire, et ce, tant que la condition
vk = fk(xk + dk)− f(xk) < −ε (2.44)
est vérifiée, pour ε > 0 fixé. Sous certaines hypothèses (voir les remarques ci-après, ainsique [80]), l’algorithme ainsi défini n’effectue qu’un nombre fini de null steps, et convergevers un point stationnaire de f .
Remarques:– Si f n’est pas convexe mais localement lipschitzienne, l’algorithme doit être adaptécar l’erreur de linéarisation (2.33) peut changer de signe (voir par exemple [80]).
– Au bout d’un grand nombre d’itérations, l’ensemble Ik devenant important, le sto-ckage en mémoire des sous-gradients peut être problématique, et leur grand nombrepeut rendre le sous-problème quadratique (2.36) difficile à résoudre. On impose alorsune taille maximale à Ik, que l’on met à jour comme une file FIFO (first in, first out,soit premier entré, premier sorti). La convergence de l’algorithme n’est cependantplus assurée, et l’on doit faire appel à une stratégie d’agrégation de sous-gradientsafin de la garantir (voir [80]).
– La famille des matrices Gk 0 doit rester bornée afin de conserver la convergencede l’algorithme. La variété des méthodes de faisceaux existantes repose en grandepartie sur la latitude dans le choix de Gk. Avec Gk = ukIn, on obtient par exemplela méthode dite proximal bundle (voir [81]) ou bundle trust region (voir [127]).
2.3.3 Méthodes pour les problèmes minimaxLes problèmes d’optimisation dits minimax (ou min-max) sans contrainte sont de la
formeminx∈Rn
maxj∈Jp
fj(x) , (2.45)
où Jp est l’ensemble fini d’indices Jp , 1, . . . , p, et les fonctions fj : Rn → R sont– soit des fonctions continûment différentiables ; on dit dans ce cas que (2.45) est unproblème minimax fini, sans contrainte,
– soit définies elles-mêmes comme des maxima de fonctions :
fj(x) = maxyj∈Yj
φj(x, yj) , (2.46)
avec, pour tout j ∈ Jp, Yj une partie compacte de Rmj et φj : Rn × Rmj → R unefonction continue et telle que pour tout y ∈ Rmj , l’application partielle x 7→ φj(x, y)

48 Chapitre 2. Optimisation non lisse
est continûment différentiable sur Rn. On parle dans ce cas de problème minimaxsemi-infini, car si l’espace de recherche est de dimension finie n, la fonction objectifapparaît comme le maximum d’une infinité de fonctions.
On notera par la suite f = maxj fj.Sous les hypothèses précédemment énoncées, on montre que f est régulière au sens de
Clarke (elle admet donc en tout point un sous-différentiel et des dérivées directionnellesdans toutes les directions, égales aux dérivées directionnelles généralisées), et pour toutx, d ∈ Rn on a
∂f(x) = coj∈Jp(x)
∇fj(x) ,f ′(x, d) = max
j∈Jp(x)〈∇fj(x), d〉
= maxs∈∂f(x)
〈s, d〉(2.47)
dans le cas minimax fini, avec Jp(x) = j ∈ Jp : fj(x) = f(x) l’ensemble des indicesdits actifs en x, et
∂f(x) = coj∈Jp(x)
co
y∈Yj(x)∇xφj(x, y)
,
f ′(x, d) = maxj∈Jp(x)
maxy∈Yj(x)
〈∇xφj(x, y), d〉= max
s∈∂f(x)〈s, d〉
(2.48)
dans le cas minimax semi-infini, où Yj(x) = yj ∈ Yj : φj(x, yj) = fj(x) (ensemble desvaleurs de y actives) et pour tout y ∈ Yj(x), ∇xφj(x, y) désigne le gradient en x del’application partielle φj(·, y).Remarque: Le problème de synthèse H∞ (1.63), si on ignore la contrainte de stabilité, estclairement du type minimax semi-infini, puisqu’il se présente sous la forme
minK∈R(m2+nK )×(p2+nK )
max1≤i≤min(m1,p1)
maxω∈[0,+∞]
σi [Tw→z(K)(jω)] (2.49)
où les σi [Tw→z(K)(jω)] désignent les valeurs singulières de la matrice de transfert enboucle fermée Tw→z(K), évaluée à la pulsation ω.
Les problèmes minimax sont largement évoqués par Polak dans l’ouvrage [114], ainsique dans [113]. Les éléments qui suivent, et notamment le choix de la fonction d’optimalité,en sont directement issus. Nous invitons le lecteur à s’y référer pour tout approfondisse-ment.
Conditions d’optimalité
Dans le cas fini, la condition nécessaire d’optimalité découle de la proposition 2.1.19et du théorème 2.2.2 :
Théorème 2.3.3 Si x∗ est un minimum local du problème minimax fini (2.45), alors
0 ∈ ∂f(x∗) = coj∈Jp(x∗)
∇fj(x∗) , (2.50)
avec Jp(x∗) =j ∈ Jp : fj(x∗) = f(x∗) = maxi∈Jp fi(x∗)
.

2.3. Algorithmes pour l’optimisation non lisse 49
Elle peut encore s’énoncer par combinaison convexe : il existe un vecteur τ ∈ Σp tel que
p∑
i=1τ i∇fi(x∗) = 0 , (2.51)
et vérifiant la condition de complémentarité
p∑
i=1τ i [f(x∗)− fi(x∗)] = 0 . (2.52)
Ce résultat se généralise au cas minimax semi-infini (voir [113, Théorème 3.1.4]) :
Théorème 2.3.4 Si x∗ est un minimum local du problème minimax semi-infini (2.45),alors
0 ∈ ∂f(x∗) = coj∈Jp(x∗)
∂fj(x∗) , (2.53)
avec Jp(x∗) = j ∈ Jp : fj(x∗) = f(x∗), et
∂fj(x∗) = coyj∈Yj(x∗)
∇xφj(x∗, yj) , (2.54)
où Yj(x∗) = yj ∈ Yj : φj(x∗, yj) = fj(x∗).
Ces conditions nécessaires d’optimalité locale se présentent sous la forme d’équationsoù apparaissent les gradients des fonctions intervenant dans le max, et des multiplicateursconvexes. Comme nous l’avons déjà remarqué dans un cadre plus vaste, la résolutiondirecte de ces équations n’est généralement pas envisageable en pratique ; on a alors recoursà un algorithme de descente. La direction normalisée de plus profonde descente (pour lanorme euclidienne) est, dans le cas d’un problème minimax fini :
d∗(x) = − s∗(x)‖s∗(x)‖ , où
s∗(x) = arg min‖
∑
j∈Jp(x)τ j∇fj(x)‖ : τ ∈ ΣJp(x)
.
avec ΣJp(x) le simplexe unité défini par
ΣJp(x) ,(τ jk)j∈Jp(x) :
∑
j∈Jp(x)τ jk = 1 et τ jk ≥ 0 pour tout j ∈ Jp(x)
. (2.55)
Nous l’avons déjà souligné, l’application x 7→ d∗(x) n’est pas continue. Cela reste vraipour les fonctions de type max (fini ou non) telles que f , et apparaît même clairementen remarquant que l’ensemble des indices actifs Jp(x) peut se réduire brutalement auvoisinage d’un point où f n’est pas différentiable. La conséquence sur l’algorithme de plusprofonde descente est, ici encore, une convergence vers un point non stationnaire de f .

50 Chapitre 2. Optimisation non lisse
Minimax fini : fonction d’optimalité et de descente
Afin de palier le défaut de continuité de la direction de plus profonde descente, Polak[114] définit f(x0, ·), une approximation quadratique par morceaux de f en x0 ∈ Rn, telque pour tout x ∈ Rn
f(x0, x) , maxj∈Jp
fj(x0) + 〈∇fj(x0), x− x0〉+ 1
2δ‖x− x0‖2, (2.56)
avec δ > 0 fixé. C’est un modèle du premier ordre de f en x0, strictement convexe. Ilpermet de définir une fonction d’optimalité θ : Rn → R, ainsi qu’une direction de rechercheh : Rn → R ; pour tout x ∈ Rn
θ(x) , minh∈Rn
f(x, x+ h)− f(x)
= minh∈Rn
maxj∈Jp
fj(x)− f(x) + 〈∇fj(x), h〉+ 1
2δ‖h‖2,
(2.57)
et h(x) est défini comme l’unique minimum de (2.57). La forme de ce dernier programmeest à rapprocher de celle du problème (2.34) (page 45) introduit pour les méthodes defaisceaux ; par un raisonnement analogue, on montre que θ(x) peut être exprimée par unprogramme quadratique convexe : pour tout x ∈ Rn
θ(x) = −minτ∈Σp
q∑
j=1τ j [f(x)− fj(x)] + 1
2δ
∥∥∥∥∥∥
q∑
j=1τ j∇fj(x)
∥∥∥∥∥∥
2. (2.58)
En effet le max dans (2.57) porte sur une famille fini de scalaires, et reste inchangé s’ilest étendu à l’enveloppe convexe de ces scalaires :
θ(x) = minh∈Rn
maxτ∈Σp
q∑
j=1τ j [fj(x)− f(x)] +
q∑
j=1τ j 〈∇fj(x), h〉+ 1
2δ‖h‖2 . (2.59)
Par dualité lagrangienne, il est possible d’échanger le min et le max sans modifier θ(x),et pour τ ∈ Σp fixé, le min interne
minh∈Rn
q∑
j=1τ j [fj(x)− f(x)] +
q∑
j=1τ j 〈∇fj(x), h〉+ 1
2δ‖h‖2 (2.60)
est un programme quadratique strictement convexe et sans contrainte, dont la solutionest h = −1
δ
∑qj=1 τ
j∇fj(x). En substituant cette dernière expression à h dans (2.59), onobtient finalement (2.58), et, toujours par dualité, h(x) s’exprime à l’aide du multiplicateurτ(x) solution de (2.58) :
h(x) = −1δ
q∑
j=1τ j(x)∇fj(x) (2.61)
On a, de plus, les propriétés suivantes pour tout x ∈ Rn :(i) θ(x) ≤ 0 et 0 ∈ ∂f(x) si et seulement si θ(x) = 0

2.3. Algorithmes pour l’optimisation non lisse 51
(ii) f ′(x, h(x)) ≤ θ(x)− 12δ‖h(x)‖2 ≤ θ(x).
(iii) L’application θ : Rn → R est continue.(iv) L’application h : Rn → R est continue.
La fonction θ permet de caractériser les solutions du problème minimax fini ; son éva-luation fournit une direction de recherche h(x) qui est une direction de descente pour f enx. Il est ainsi possible de construire un algorithme de descente, généralisant aux problèmesminimax finis la méthode de plus profonde descente avec critère d’Armijo. Cet algorithme,dit algorithme PPP (pour Pshenichnyi, Pironneau, Polak, voir [114, Algorithme 2.4.1]),se présente de la façon suivante :
Algorithme 1 Problèmes minimax finis (Algorithme PPP).Fixer les paramètres α ∈]0, 1], δ > 0.Initialiser le compteur k ← 0 et fixer le point initial x0 ∈ Rn.Etape 1. Evaluer fj(xk) et ∇fj(xk) pour tout j ∈ Jp = 1, . . . , p.
En déduire f(xk).Etape 2. Evaluer la fonction d’optimalité θk , θ(xk) en résolvant le sous-problème qua-
dratique convexe (2.58). En déduire la direction de recherche hk , h(xk) avec(2.61).
Etape 3. Si θk = 0, arrêt de l’algorithme.Sinon, déterminer une taille de pas tk dans la direction hk réalisant au moins lafraction α de la décroissance de f attendue, autrement dit telle que
f(xk + tkhk)− f(xk) ≤ αtkθk . (2.62)
Etape 4. Mettre à jour xk+1 ← xk + tkhk.Incrémenter le compteur k ← k + 1. Retourner à l’étape 1.
On montre que les points d’accumulation x∗ de toute suite infinie d’itérés de l’algo-rithme 1 vérifient θ(x∗) = 0, et sont donc des solutions locales du problème minimaxfini.Remarques:
– Si on suppose les fonctions fj strictement convexes (en plus d’être continûmentdifférentiables), f est elle-même strictement convexe, et dans ce cas xk → x∗ l’uniquesolution du problème minimax.
– Si on suppose de plus les fonctions fj deux fois continûment différentiables, et qu’ilexiste m > 0, M > 0, m ≤M tels que, pour tout j ∈ Jp, pour tout x, h ∈ Rn
m‖h‖2 ≤⟨h,∇2
xxf(x)h⟩≤M‖h‖2 ; (2.63)
si on suppose enfin que δ ∈ [m,M ], et que, à l’étape 3 de l’algorithme 1, la taille depas est déterminée par backtracking de paramètre β ∈]0, 1[, c’est-à-dire
tk , arg maxl∈N
βl : f(xk + βlhk)− f(xk) ≤ αβlθk
, (2.64)

52 Chapitre 2. Optimisation non lisse
alors la convergence de la suite des itérés est R-linéaire : il existe une constanteC > 0 telle que, pour tout k ∈ N
‖xk − x∗‖ ≤ C(√
1− αβ mM
)k. (2.65)
– Notons que sous une hypothèse assez forte portant sur x∗, minimum local du pro-blème minimax fini (x∗ doit être un point de Haar de ce problème, voir [114,Définition 2.4.18]), la convergence de la suite des itérés de l’algorithme 1 est Q-quadratique : il existe une constante C ≥ 0 et un rang k0 ∈ N tels que, pour toutk ≥ k0 ‖xk+1 − x∗‖
‖xk − x∗‖2 ≤ C . (2.66)
– Signalons enfin que la méthode de Newton a également été adaptée aux problèmesminimax. La fonction d’optimalité proposée dans [115, 114] est cependant beaucoupplus difficile à évaluer. Elle s’exprime sous forme duale par
θ(x) = − minτ∈Σp
q∑
j=1τ j[f(x)− fj(x)
]+
12δ
⟨ q∑
j=1τ j∇fj(x),
[ q∑
j=1τ j∇2fj(x)
]−1 q∑
j=1τ j∇fj(x)
⟩, (2.67)
qui n’est plus du tout un programme quadratique convexe.
L’algorithme 1 a été appliqué dans le cadre des problèmes de commande à un critèretemporel (chapitre 5). Il a également été utilisé pour résoudre, sous certaines hypothèses,des problème de stabilisation de systèmes (chapitre 3).
Minimax semi-infini : fonction d’optimalité et de descente
Les problèmes minimax semi-infinis appartiennent au domaine plus général de l’Opti-misation appelé programmation semi-infinie. On appelle problème semi-infini (linéaire ounon linéaire) tout problème d’optimisation sous contraintes, de la forme
minz∈Rq
g(z)
tel que h(z, y) ≤ 0 pour tout y ∈ Y(2.68)
où Y contient une infinité d’éléments. On retrouve le problème minimax en posant z = [ tx ]où t est une variable réelle auxiliaire, g(z) = t, Y = 1 × Y1 ∪ · · · ∪ p × Yp, et
h(z, y) = φy1
x,
y2
...ymy1
− t.
La résolution numérique des problèmes semi-infinis est abordée en détails dans [67],nous en donnons ici un bref aperçu ; les différentes méthodes procèdent toutes par résolu-tions successives de sous problèmes issus de (2.68), pour lesquels les contraintes sont ennombre fini. Les approches varient dans la façon de réduire l’ensemble Y à un nombre finid’éléments :

2.3. Algorithmes pour l’optimisation non lisse 53
– Les méthodes d’échange s’appuient sur une suite de parties finies Yk de Y , qui sontmises à jour à chaque itération par ajout et suppression d’éléments.
– Les méthodes de discrétisation (ou gridding) utilisent des discrétisations de plus enplus fines de Y .
– Enfin, les méthodes de réduction locale exploitent les maxima (locaux et supposésen nombre fini) de la fonction y 7→ h(zk, y) (zk désignant l’itéré courant) afin deformuler un sous-problème avec un nombre fini de contraintes.
Un algorithme pour le problème minimax semi-infini basé sur une technique de dis-crétisation des ensembles Yj est proposé dans [113, 114]. Il s’appuie sur la théorie desapproximations consistantes, présentées dans [114], et, pour chaque sous-problème mi-nimax fini généré, effectue un pas de descente analogue à celui de l’algorithme 1. Nouspréférons développer ici la méthode introduite dans [6] pour la synthèse H∞ et aisémentgénéralisable aux problèmes minimax semi-infinis (algorithme 2 ci-après). Son applicationau problème de synthèse H∞ est abordée largement aux chapitres 4 et 5. Cet algorithmea par ailleurs été utilisé pour résoudre des problèmes de synthèse H∞ multibande [10]et multidisque [9]. Enfin, nous proposerons au chapitre 6 d’appliquer une méthode deréduction locale pour la résolution du problème de synthèse H∞, chaque sous-problèmeétant résolu par programmation quadratique successive (SQP).

54 Chapitre 2. Optimisation non lisse
Algorithme 2 Problèmes minimax semi-infinis (Noll et Apkarian).Fixer les paramètres α ∈]0, 1], β ∈]0, 1[, δ > 0.Initialiser le compteur k ← 0 et fixer le point initial x0 ∈ Rn.Etape 1. Déterminer pour tout j ∈ Jp = 1, . . . , p un ensemble fini Yj,k ⊂ Rmj
contenant Yj(xk).Etape 2. Evaluer φj(xk, yj) et ∇xφj(xk, yj) pour tout j ∈ Jp et pour tout yj ∈ Yj,k.
En déduire f(xk).Etape 3. Evaluer la fonction d’optimalité θk , θ(xk) en résolvant le sous-problème
θ(xk) = minh∈Rn
maxj∈Jp
maxyj∈Yj,k
φj(xk, yj)− f(xk) + 〈∇xφj(xk, yj), h〉+ 1
2δ‖h‖2.
(2.69)En déduire la direction de recherche hk , h(xk) avec
h(xk) = arg minh∈Rn
maxj∈Jp
maxyj∈Yj,k
φj(xk, yj) + 〈∇xφj(xk, yj), h〉+ 1
2δ‖h‖2. (2.70)
Etape 4. Si θk = 0, arrêt de l’algorithme.Sinon, déterminer une taille de pas tk dans la direction hk telle que la décrois-sance du modèle max fini vérifie la condition de type Armijo
Φk , maxj∈Jp
maxyj∈Yj,k
φj(xk + tkhk, yj)− f(xk) ≤ αtkθk . (2.71)
Calculer la décroissance effective
Ψk , f(xk + tkhk, yj)− f(xk) . (2.72)
Etape 5. Si Ψk ≤ βΦk, mettre à jour xk+1 ← xk+tkhk, incrémenter le compteur k ← k+1,et retourner à l’étape 1.Sinon, pour tout j ∈ Jp, mettre à jour Yj,k par Yj,k+1 fini tel que Yj,k ( Yj,k+1 ⊂Yj, poser xk+1 ← xk, incrémenter le compteur k ← k + 1, et retourner à l’étape2.

Deuxième partie
Algorithmes développés etapplications
55


Chapitre 3
Techniques non lisses pour lastabilisation des systèmes linéaires
Nous nous intéressons dans ce premier développement au problème de la stabilisationen boucle fermée des systèmes LTI (voir section 1.2.2). Si, dans l’ordre chronologique, nospremiers travaux ont porté sur l’apport de l’Optimisation non lisse pour la synthèse H∞([8] et [27], notamment), il apparaissait nécessaire de pouvoir disposer d’un correcteurstabilisant afin d’initialiser les algorithmes développés. Nous verrons en effet dans leschapitres suivants que le système en boucle fermée est supposé et maintenu stable à chaqueitération, que ce soit pour les algorithmes de descente (chapitres 4 et 5) ou pour la méthodede réduction locale avec programmation quadratique successive (chapitre 6). Le problèmede stabilisation est donc abordé ici comme un problème auxiliaire à celui de la synthèseH∞, mais dont la résolution conditionne l’initialisation de celui-ci. Il n’en demeure pasmoins un problème difficile. Dans le cas de la stabilisation par retour d’état, un calcul derang permet de vérifier l’existence d’une solution, elle-même obtenue par résolution d’uneinégalité matricielle linéaire. En dehors de cette situation très particulière, les méthodesexistantes (par résolution d’une inégalité matricielle bilinéaire notamment) n’opèrent quesur des systèmes de petite taille (quelques dizaines d’états au maximum).
Notre approche présentée ici consiste à rechercher un correcteur stabilisant en plaçant,de façon itérative, tous les pôles de la boucle fermée dans le demi-plan gauche ; nousprocédons pour ce faire par minimisation de l’abscisse spectrale α de la matrice d’état enboucle fermée.
Poser ainsi directement le problème de la stabilisation offre deux avantages : d’une part,la dimension de l’espace de recherche est indépendante du nombre d’états du système,puisqu’elle est réduite au nombre de paramètres libres définissant le correcteur recherché ;d’autre part, la structure du correcteur peut être imposée par une simple paramétrisation.
Cependant, comme nous l’avons noté dans la section 1.2.2, l’abscisse spectrale n’estpas, en général, une fonction localement lipschitzienne. La régularité de α en X ∈ Cn×ndépend de la multiplicité des valeurs propres λ de X dites actives, c’est-à-dire tellesque Reλ = α(X). Si celles-ci sont semi-simples1, et seulement dans ce cas, alors α est
1Une valeur propre λ ∈ Λ(X) est dite semi-simple si, par définition, le bloc associé à λ dans la formede Jordan de X est diagonal ou, de façon équivalente, si la dimension du sous-espace propre associé à λ(la multiplicité géométrique de λ) coïncide avec la multiplicité de λ dans le polynôme caractéristique de
57

58 Chapitre 3. Techniques non lisses pour la stabilisation des systèmes linéaires
localement lipschitzienne en X (voir par exemple [110]). Si, en particulier, les valeurspropres actives de X sont simples, alors α est même différentiable en X. Dans tous lesautres cas, α n’est pas localement lipschitzienne en X, et les outils de l’analyse non lissesont plus délicats à définir (voir [41]).
L’algorithme non lisse présenté dans ce chapitre vient en complément de celui in-troduit dans [6], basé sur une méthode d’optimisation sans dérivée (dite de recherchemulti-directionnelle) couplée à un test rigoureux d’optimalité. La convergence vers uncorrecteur stabilisant n’étant garantie ni par l’un, ni par l’autre (si tant est qu’un telcorrecteur existe), il nous a paru important d’offrir un éventail d’algorithmes, capablesd’itérer rapidement, et autorisant ainsi la construction d’une heuristique de stabilisation.Elle pourra être complétée par la minimisation d’autres critères (non lisses également) : lanorme H∞ shiftée ‖.‖∞,a(voir [8, section 7.1], l’abscisse pseudo-spectrale αε et la distanceà l’instabilité β.
X (la multiplicité algébrique de λ)

3.1. Introduction and notations 59
Nonsmooth techniques for stabilizinglinear systems
V. Bompart, P. Apkarian and D. Noll
Article publié dans les actes de American Control Conference,New York City, 2007.
AbstractWe discuss closed-loop stabilization of linear time-invariant dynamical systems, a problemwhich frequently arises in controller synthesis, either as a stand-alone task, or to initializealgorithms for H∞ synthesis or related problems. Classical stabilization methods basedon Lyapunov or Riccati equations appear to be inefficient for large systems. Recently,nonsmooth optimization methods like gradient sampling [35] have been successfully usedto minimize the spectral abscissa of the closed-loop state matrix (the largest real part ofits eigenvalues) to solve the stabilization problem. These methods have to address thenonsmooth and even non-Lipschitz character of the spectral abscissa function. In thiswork, we develop an alternative nonsmooth technique for solving similar problems, withthe option to incorporate second-order elements to speed-up convergence to local minima.Using several case studies, the proposed technique is compared to more conventionalapproaches including direct search methods and techniques where minimizing the spectralabscissa is recast as a traditional smooth nonlinear mathematical programming problem.
3.1 Introduction and notationsInternal stability is certainly the most fundamental design specification in linear control.Necessary and sufficient conditions leading to an efficient algorithmic solution are still notknown [22]. From an algorithmic point of view, the output feedback stabilization problemis clearly in the class NP and conjectured to be NP-hard (see [24]). Output feedbackstabilizability can be checked via decidability algorithms, like the Tarski and Seidenbergreduction methods [3], but the computational cost is exponential in the problem size andbecomes rapidly prohibitive as the number of controller parameters increases.
Internal stability could be expressed in terms of a bilinear matrix inequality (BMI).Solving BMIs globally is algorithmically difficult, and introducing Lyapunov variables tosymmetrize the problem further increases the number of decision parameters and oftenleads to numerical ill-conditioning.
A less ambitious line is to address internal stability as a local optimization problem.Recent approaches using nonsmooth optimization techniques are [33, 35] for stabilization,

60 Chapitre 3. Techniques non lisses pour la stabilisation des systèmes linéaires
and [8, 10, 9, 26] for H∞ synthesis. In [35] for instance the authors propose to optimizethe spectral abscissa of the closed-loop matrix via specific nonsmooth techniques until astrictly negative value is obtained. If the method converges to a local minimum with pos-itive value, indicating failure to solve the control problem, the method has to be restartedfrom a different initial guess. Our present contribution is also a local optimization tech-nique, but our method to generate descent steps is new. In particular, in contrast with[35], our approach is deterministic. We believe that while local optimization techniques donot provide the strong certificates of global methods, they offer better chances in practiceto solve the stability problem.
The paper is organized as follows. In section 3.2, we recall differentiability propertiesof the spectral abscissa and discuss strategies to minimize it. In section 3.3, we computesubgradients of the closed-loop spectral abscissa, and specify to cases of practical interestwith structured controllers like PID or others. The computation of descents steps isexplained in section 3.4. It leads to the presentation of the algorithm and its second ordervariant in section 3.5. Finally, section 3.6 presents numerical experiments on miscellaneousautomatic control applications, with an example involving structured controllers. Forsome of them, the final spectral properties of the state matrix are analyzed. Our methodis compared to other design methods based on a) direct search algorithm, b) continuoussmooth optimization, and c) nonsmooth optimization.
Matrix notationsIn the following (Cn×n, 〈〈·, ·〉〉) is the Hilbert space of complex n× n matrices with innerproduct 〈〈M,N〉〉 , Re tr MHN , where MH denotes the transconjugate of M . Theinduced Hilbert space norm is the Frobenius norm and noted ‖·‖. Sn is the linear subspaceof n× n complex symmetric matrices.
ForM ∈ Cn×n,M 0 means thatM ∈ Sn is positive semi-definite. The n eigenvaluesof M ∈ Cn×n (repeated with multiplicity) are denoted λ1(M), . . . , λn(M) and orderedlexicographically, that is by decreasing real part first, and next by decreasing imaginarypart in case of equal real parts. When the eigenvalues of M are considered without theirmultiplicities, they are denoted µ1(M), . . . , µq(M) and ordered in the same manner as(λi(M)), with respective algebraic multiplicities n1, . . . , nq (with n1 + · · · + nq = n) andgeometric multiplicities p1, . . . , pq. We say that an eigenvalue µj(M) is semisimple ifnj = pj, and is nonderogatory if pj = 1. If nj > pj, µj(M) is said defective.
In the sequel, α(M) denotes the spectral abscissa of M , defined as
α(M) , max1≤j≤q
Re (µj (M)) .
Any eigenvalue of M whose real part attains α(M) is said active. The set of all activeeigenvalues ofM is denoted A(M) , µj (M) : Re (µj (M)) = α(M), the correspondingactive indices sets are
I(M) , i ∈ N : 1 ≤ i ≤ n and λi(M) ∈ A(M) ,and without multiplicity
J (M) , j ∈ N : 1 ≤ j ≤ q and µj(M) ∈ A(M) .

3.2. Minimizing the spectral abscissa 61
Plant and controller notationsThe open-loop system we wish to stabilize is a continuous linear time-invariant plant,described without loss of generality by the state-space equations
P (s) :[xy
]=
[A BC 0
] [xu
](3.1)
where A ∈ Rn×n, B ∈ Rn×m and C ∈ Rp×n. We consider static or dynamic outputfeedback control laws of the form u = K(s)y in order to stabilize (3.1) internally. Wesuppose that the order of the controller nK ∈ N is fixed. In the case of static feedback(nK = 0), the controller is denoted by K ∈ Rm×p. For dynamic controllers defined by thestate-space equations
K(s) :[xKu
]=
[AK BK
CK DK
] [xKy
](3.2)
we use the following standard substitutions in order to reduce to the static feedback case:
K →[AK BK
CK DK
], A→
[A 00 0nK
], B →
[0 BInK 0
], C →
[0 InKC 0
],
nK → 0, n→ n+ nK , m→ m+ nK , p→ m+ p.(3.3)
The affine mapping K 7→ A+BKC is denoted as Ac.
3.2 Minimizing the spectral abscissaWe start by writing the stabilization problem as an unconstrained optimization program
minK∈K
α(A+BKC) (3.4)
where the search space K is either the whole controller space Rm×p, or a subset of Rm×pin those cases where a stabilizing controller with a fixed structure is sought.
Closed-loop stability is satisfied as soon as α(A+BKC) < 0, so that the minimizationprocess can be stopped before convergence. Convergence to a local minimum is importantonly in those cases where the method fails to locate negative values α < 0. If the processconverges toward a local minimum K∗ with positive value α ≥ 0, we know at least thatthe situation cannot be improved in a neighborhood of K∗, and that a restart away fromthat local minimum is inevitable.
Program (3.4) is difficult to solve for two reasons. Firstly, the minimax formulationcalls for nonsmooth optimization techniques, but more severely, the spectral abscissaM 7→α(M) as a function Rn×n → R is not even locally Lipschitz everywhere. The variationalproperties of α have been analyzed by Burke and Overton [41]. In [40] the authorsshow that if the active eigenvalues of M are all semisimple (nj = pj), α is directionallydifferentiable at M and admits a Clarke subdifferential ∂α(M). This property fails in thepresence of a defective eigenvalue in the active set A(M).
Despite the lack of Clarke subdifferentiability of the function α, we consider program(3.4) as practically useful, if the following facts are taken into account:

62 Chapitre 3. Techniques non lisses pour la stabilisation des systèmes linéaires
• Starting our nonsmooth optimization from a closed-loop matrix A + BK0C withsemisimple active eigenvalues, we expect that iterates A+BKlC will remain semisim-ple. Nonderogatory Jordan blocks will only occur at the limit point A+BK∗C. Ifa negative value α(A + BKlC) < 0 is obtained, we can stop the procedure at thisiterate, and the question of optimality is irrelevant.
• On the other hand, if iterates are not stabilizing, α(A + BKlC) ≥ 0 for all l, thenwe need to check whether the limit point A+BK∗C is optimal or not. This requiresa nonsmooth stopping test. If the limit point is locally optimal, we know that arestart of the method away from K∗ is inevitable. On the other hand, if K∗ is aso-called dead point, that is, a limit point which is not locally optimal, then weshould not do a restart, but use nonsmooth decent techniques and keep optimizinguntil a local minimum is found.
Several strategies for addressing the nonsmoothness in (3.4) have been put forward: Burke,Lewis and Overton have extended the idea of gradient bundle methods (see [69] for theconvex case and [80] for the Lipschitz continuous case) to certain non-Lipschitz functions,for which the gradient is defined, continuous and computable almost everywhere. Theresulting algorithm, called gradient sampling algorithm, is presented in [35] (in the sta-bilization context) and analyzed in [34, 39] with convergence results. The outcome ofthis research is a package HIFOO, which will be included in our tests, see Section 3.6.The search direction in HIFOO depends on randomly sampled points which gives thealgorithm a nondeterministic aspect. In contrast, Apkarian and Noll propose a compositeapproach in [6], combining a direct search method and a nonsmooth strategy for descentand stopping test. By construction, direct search algorithms require a lot of functionsevaluations, which is demanding if the number of controller decision variable is large.In response, the present paper proposes an algorithm which uses exclusively nonsmoothdescent steps, allowing to avoid the drawbacks of both approaches.
3.3 Subgradients of the spectral abscissa3.3.1 Subgradients in state-spaceIn this section, we suppose that all active eigenvalues of the closed-loop state matrixAc(K) are semisimple, with r = |J (K)| < q distinct active eigenvalues (s = |I(K)| < nif counted with their multiplicity). We have A(K) = µ1 (Ac(K)) , . . . , µr (Ac(K)) =λ1 (Ac(K)) , . . . , λs (Ac(K)). The Jordan form J(K) of Ac(K) is then partly diagonal,more precisely :
J(K) = V (K)−1Ac(K)V (K)
=
D(K)Jr+1(K)
. . .Jq(K)

3.3. Subgradients of the spectral abscissa 63
• D(K) = diag [λ1 (Ac(K)) , . . . , λs (Ac(K))] is the diagonal part of active eigenval-ues,
• Jj(K), for r < j ≤ q are nj × nj block-diagonal matrices of Jordan blocks, such as
Jj(K) =
Jj,1(K)
. . .Jj,pj(K)
, with
Jj,k =
µj 1. . . . . .
. . . 1µj
• V (K) = [v1 (Ac(K)) , . . . , vn (Ac(K))], where the first s columns are right eigen-vectors of Ac(K) associated with the active eigenvalues (the other columns aregeneralized right eigenvectors),
• V (K)−1 =
u1 (Ac(K))H
...un (Ac(K))H
,where the first s rows are left eigenvectors of Ac(K)
associated with the active eigenvalues (the other rows are generalized left eigenvec-tors).
We define U(K) = V (K)−H , and for 1 ≤ j ≤ r, Vj(K) (resp. Uj(K)) the n×nj block fromV (K) (resp. from U(K)) composed of the right eigenvectors (resp. of the transconjugateof the left eigenvectors) associated with µj.
The function α Ac is Clarke regular at K, as a composition of the affine mappingAc with α, which is locally Lipschitz continuous at K. Let µj ∈ A (Ac (K)) be an activeeigenvalue of Ac(K), such that µj = λi (Ac (K)) = · · · = λi+nj (Ac (K)). Then the realmatrix
φj(K) = Re(BTUjYjV
Hj C
T)
=(Re
(CVjYjU
Hj B
))T
is a Clarke subgradient of the composite function αAc atK, where Yj 0 and Tr(Yj) = 1.Moreover, the whole subdifferential ∂(α Ac)(K) is described by matrices of the form
φY (K) =∑
j∈J (Ac(K))
(Re
(CVjYjU
Hj B
))T(3.5)
where Yj 0 and ∑j∈J (Ac(K)) Tr(Yj) = 1.Notice that the complex conjugate paired active eigenvalues µj and µk = µj (k 6= j)
share the same closed-loop spectral abscissa subgradient φj = φk. The subdifferential isthen kept unchanged if the active set only contains the active eigenvalues whose imaginarypart is nonnegative: A(M) = µj (M) | Re (µj (M)) = α(M) and Im (µj (M)) ≥ 0.

64 Chapitre 3. Techniques non lisses pour la stabilisation des systèmes linéaires
Remark 1 If the open-loop plant is not controllable, then every uncontrollable modeµl(A) persists in the closed-loop: for all controllers K, there exists j such that µl(A) =µj(Ac(K)). Moreover, if this eigenvalue is semisimple and active for α Ac, the asso-ciated subgradients are null, because UH
j B = 0. The case of unobservable modes leadsto the same conclusion, because CVj = 0. In this way, whenever an uncontrollable orunobservable open-loop mode µl(A) becomes active for the closed-loop spectral abscissa,we get 0 ∈ ∂(αAc)(K) and then we have local optimality of K. Moreover, the optimalityis global because Re µl(A) is a lower bound for α Ac.
3.3.2 Subgradients and dynamic controllersThe problem of stabilizing the plant P by dynamic output feedback reduces formally tothe static case, with the substitutions (3.3). Nevertheless, the dynamic case is slightlymore tricky, because the matrices AK , BK , CK and DK have to define a minimal con-troller realization, both at the initialization stage and at every subsequent iteration of thealgorithm.
As an illustration, if the nK-th order (nonminimal) realization of the initial controlleris chosen with BK = 0 and CK = 0 (neither observable nor controllable) and withα(AK) < α(A+ BDKC), it is straightforward to show that the resulting subgradients ofthe closed-loop spectral abscissa are convex linear combinations of matrices of the form
φj(K) = 0 0
0 Re(CVjYjU
Hj B
)T
where Vj (resp. UHj ) are blocks of right (resp. left) eigenvectors associated with the active
eigenvalues of A + BDKC, and Yj 0, Tr(Yj) = 1. As the successive search directionshave the same structure, see (3.13), this results in unchanged AK , BK , CK blocks amongthe new iterates. Put differently, they all represent static controllers.
In order to initialize the descent algorithm with a minimal nK-th order controller, andto maintain this minimality for all subsequent iterates, we use an explicit parametrizationof minimal, stable and balanced systems [107, 43]. With this canonical structure, thenumber of free parameters for a nK-th order controller with p inputs and m outputs isnK(m+ p) +mp.
3.3.3 Subgradients with structured controllersFormulation (3.4) is general enough to handle state-space structured controllers, such asdecentralized or PID controllers, minimal realizations (see 3.3.2), and others. Let K :Rk −→ Rm×p be a smooth parametrization of an open subset K ⊂ Rm×p, containing state-space realizations of a family of controllers of a given structure. Then the stabilizationproblem can be written as
minκ∈Rk
α (Ac K (κ)) .

3.4. Descent step and optimality function 65
The Clarke subgradients ψ ∈ Rk of the composite function α Ac K are derived from(3.5) with the chain rule (see [44, section 2.3])
ψ(κ) = Jvec(K)(κ)Tvec (φ (K (κ)))
where Jvec(K)(κ) ∈ Rmp×k is the Jacobian matrix of vec(K) : κ ∈ Rk 7→ vec(K(κ)) ∈ Rmp.
3.4 Descent step and optimality functionIn order to derive a descent step from the subdifferential ∂(α Ac)(K), we follow a first-order step generation mechanism for minimax problems introduced by Polak in [113, 114].It was described and applied in the semi-infinite context of the H∞ synthesis in [8]. Thisdescent scheme is based on the minimization of a local and strictly convex first-ordermodel θ(K), which serves both as a descent step generator and as an optimality function.
We first make the strong assumption that all the eigenvalues of the closed-loop statematrix Ac(K) are semisimple. Then, with δ > 0 fixed, we define
θ(K) , minH∈K
max1≤j≤q
maxYj 0
Tr(Yj) = 1
Re (µj (Ac (K)))− α (Ac (K)) + 〈〈φj(K), H〉〉+ 12δ ‖H‖
2
(3.6)where 〈〈φj(K), H〉〉 = Tr
(Re
(CVjYjU
Hj B
)H).
Using Fenchel duality for permuting the min and double max operators, we obtain thedual form of (3.6), where the inner minimization over H becomes unconstrained and canbe computed explicitly, leading to:
θ(K) = maxτj ≥ 0∑j τj = 1
maxYj 0
Tr(Yj) = 1
[ q∑
j=1τjRe (µj (Ac (K)))− α (Ac (K))
− 12δ
∥∥∥∥∥∥
q∑
j=1τjφj(K)
∥∥∥∥∥∥
2 ](3.7)
and we get the minimizer H(K) of the primal formulation (3.6) from the solution((τ ?j (K)
)1≤j≤q ,
(Y ?j (K)
)1≤j≤q
)
of the dual expression (3.7) in the explicit form
H(K) = −1δ
q∑
j=1τ ?j (K) Re
(CVjY
?j (K)UH
j B)T. (3.8)
We recall from [113] the basic properties of θ and H :
1. θ(K) ≤ 0 for all K ∈ K, and θ(K) = 0 if and only if 0 ∈ ∂(α Ac)(K).

66 Chapitre 3. Techniques non lisses pour la stabilisation des systèmes linéaires
2. If 0 6∈ ∂(α Ac)(K), then H(K) is a descent direction for the closed-loop spectralabscissa at K. More precisely for all K:
(α Ac)′ (K,H(K)) ≤ θ(K)− 12δ ‖H(K)‖2 ≤ θ(K).
3. The function θ is continuous.
4. The operator K 7→ H(K) is continuous.
Therefore direction H(K) will be chosen as a search direction in a descent-type algorithmand combined with a line search. The continuity of H (·) ensures that every accumulationpoint K in the sequence of iterates satisfies the necessary optimality condition 0 ∈ ∂(α Ac)(K) (see [8]). It is not clear whether continuity in this sense is still satisfied whenthe hypothesis of semi-simplicity of the eigenvalues is dropped. Notice that even forsemisimple eigenvalues, continuity fails for the steepest descent direction, defined as thesolution of the program
min‖H‖≤1
(α Ac)′(K,H) = min‖H‖≤1
maxj∈J (Ac(K))
maxYj 0
Tr(Yj) = 1
〈〈φj(K), H〉〉 .
This is why steepest descent steps for nonsmooth functions may fail to converge. In ourcase this justifies the recourse to the quadratic, first-order model θ as a descent function.Moreover, properties 1) and 3) suggest a stopping test based on the value of θ(K), becauseas soon as θ(K) ≥ −εθ (for a small given εθ > 0), the controller K is in a neighborhoodof a stationary point.
3.5 Nonsmooth descent algorithms3.5.1 Variant I (first-order type)We discuss details of a descent-type algorithm for minimizing the closed-loop spectralabscissa, based on the theoretical results from the previous section.
For a given iterate Kl, we have to address first the practical computation of themaximizer of the dual form (3.7) of θ(Kl). Without any additional hypothesis, it is asemidefinite program (SDP). The matrix variables come from the possible multiplicityof some eigenvalues of Ac(Kl). Fortunately, this situation is unlikely to happen in anumerical framework, because the eigenvalues and eigenvectors are computed within agiven tolerance. Except in some academic examples (see for instance section 3.6.1), orfor particular values of the controller, coalescence of eigenvalues will not be observed inpractice. Assuming that all the eigenvalues of Ac(K) are simple, the SDP (3.7) reducesto a concave quadratic maximization program:
θ(K) = maxτj ≥ 0∑j τj = 1
−α (Ac (K)) +
n∑
j=1τjRe (µj (Ac (K)))− 1
2δ
∥∥∥∥∥∥
n∑
j=1τjφj(K)
∥∥∥∥∥∥
2 (3.9)

3.5. Nonsmooth descent algorithms 67
where φj(K) = Re(Cvju
Hj B
)T, with vj a right eigenvector associated with µj (Ac (K)),
and uHj the corresponding left eigenvector (such that uHj vj = 1).To go one step further, we reduce the dimension of the search space. There are n
scalar variables τj in (3.9), n the order of the open-loop plant, augmented by nK , theorder of the controller, in the case of a dynamic controller. For a given ratio ρ ∈ [0, 1],we define the following enriched set of active eigenvalues
Aρ(K) ,µj (Ac(K)) : α (Ac (K))− Re (µj (Ac(K)))
≤ ρ[α (Ac (K))− min
1≤i≤nRe (µi (Ac(K)))
] (3.10)
where Jρ(K) = j ∈ N | 1 ≤ j ≤ n and µj (Ac(K)) ∈ Aρ(K) is the corresponding en-riched active index set. It is clear that ρ 7→ Aρ(K) is nondecreasing on [0, 1], and thatA(K) = A0(K) ⊂ Aρ(K) ⊂ A1(K) = spec (Ac(K)) for all ρ ∈ [0, 1]. Hence, we havelocally
α (Ac (K)) = maxj∈Jρ(K)
Re (µj (Ac(K))) . (3.11)
By applying the descent function θ to this local formulation, we finally get the quadraticprogram
θ(K) = maxτj ≥ 0∑j τj = 1
−α (Ac (K)) +
|Jρ(K)|∑
j=1τjRe (µj (Ac (K)))− 1
2δ
∥∥∥∥∥∥
|Jρ(K)|∑
j=1τjφj(K)
∥∥∥∥∥∥
2 .
(3.12)The descent direction H(K) is obtained from the maximizer
(τ ?j (K)
)1≤j≤|Jρ(K)| as
H(K) = −1δ
|Jρ(K)|∑
j=1τ ?j (K) Re
(Cvju
Hj B
)T. (3.13)
Notice that for ρ = 0 the QP in (3.12) reduces to the steepest descent finding problem
minτj ≥ 0∑j τj = 1
∥∥∥∥∥∥
|J (K)|∑
j=1τjφj(K)
∥∥∥∥∥∥= min
φ∈∂(αAc)(K)‖φ‖
while ρ = 1 reproduces (3.9). The parameter ρ offers some additional numerical flexibility,and allows the weaker asumption that only eigenvalues in Aρ(K) are simple.
The additional stopping tests in step 5 allows the algorithm to stop when neitherthe controller nor the spectral abscissa updates are satisfactory, whereas the stationaritycriterion on the value of θ is not met in step 2. The situation can occur if some of theactive eigenvalues coalesce:

68 Chapitre 3. Techniques non lisses pour la stabilisation des systèmes linéaires
Algorithm 1 Variant I descent type algorithm for the closed-loop spectral abscissa.Set the parameters ρ ∈ [0, 1], δ > 0, K0 ∈ K, εθ, εα, εK > 0, β ∈]0, 1[. Set the counterl← 0.
1. Compute α (Ac (K0)), the enriched active index set Jρ(K0) and the correspondingsubgradients φj(K0).
2. Solve (3.12) for K = Kl and get the search direction H(Kl) from (3.13).If θ(Kl) ≥ −εθ then stop.
3. Find a step length tl > 0 satisfying the Armijo line search condition
α (Ac (Kl + tlH(Kl))) ≤ α (Ac (Kl)) + βtlθ(Kl)
4. Set Kl+1 ← Kl + tlH(Kl).Compute α (Ac (Kl+1)), the extended active index set Jρ(Kl+1) and the correspond-ing subgradients φj(Kl+1).
5. If α (Ac (Kl)) − α (Ac (Kl+1)) ≤ εα(1 + α (Ac (Kl))) and ‖Kl −Kl+1‖ ≤εK (1 + ‖Kl‖)then stop.Otherwise set l← l + 1 and go back to 2.
• In case of a multiple but semisimple eigenvalue, the Clarke subdifferential still exists(see 3.3.1), but is underestimated in the algorithm because we made the hypothesisthat active eigenvalues were simple in order to reduce the SDP to a QP. More pre-cisely in that case
∂(α Ac)(Kl) = coRe
(CVjYjU
Hj B
)T: j ∈ J (Kl), Yj 0 andTr(Yj) = 1
) coRe
(Cvju
Hj B
)T: j ∈ J (Kl)
• In case of a defective eigenvalue, the Clarke subdifferential no longer exists.
3.5.2 Variant II (second-order type)In the optimality function (3.6) the parameter δ acts as an estimate of the average of thecurvatures of Re µj Ac. If second order information is available, it may therefore beattractive to replace the scalar δ in (3.6) by Hessian matrices. Polak [114] extends theNewton method to min-max problems, but the corresponding dual expression for θ(Kl)does no longer reduce to a quadratic program like (3.9). We propose a different approachhere which is based on a heuristic argument. The quadratic term of θ is weighted by amatrix Ql, which is updated at each step using a second-order model of αAc. We suggest

3.6. Numerical examples 69
a quasi-Newton method based on the new optimality function θ at iteration l ≥ 1:
θ(Kl) , minH∈K
maxj∈Jρ(Kl)
maxYj 0
Tr(Yj) = 1
[Re (µj (Ac (Kl)))− α (Ac (Kl)) + 〈〈φj(K), H〉〉
+ 12vec(H)TQlvec(H)
]. (3.14)
The matrix Ql is a positive-definite, symmetric mp×mp matrix, updated with the sym-metric rank-two BFGS update
Ql+1 , Ql +yly
Tl
yTl sl− Qlsls
Tl Ql
sTl Qlsl(3.15)
where sl = vec(Kl+1 − Kl), and yl = vec(gl+1 − gl), with gl the subgradient of minimalnorm in ∂(α Ac)(Kl), by analogy with the gradient for smooth functions.
The dual form of (3.14) is then the convex QP
θ(Kl) = maxτj ≥ 0∑j τj = 1
− α (Ac (K)) +
|Jρ(Kl)|∑
j=1τjRe (µj (Ac (Kl)))
− 12vec
|Jρ(Kl)|∑
j=1τjφj(Kl)
T
Q−1l vec
|Jρ(Kl)|∑
j=1τjφj(Kl)
(3.16)
and the vectorized descent direction derived from the optimal(τ ?j (Kl)
)convex coefficients
is:
vec(H(Kl)
)= −Q−1
l
|Jρ(Kl)|∑
j=1τ ?j (Kl) vec (φj(Kl)) . (3.17)
The resulting algorithm is given below (Algorithm 2). Notice that the quadraticsubproblem (3.16) invokes the inverse of the BFGS update Ql. Inversion can be avoidedby directly updating Q−1
l at step 5, with the update formula
Q−1l+1 = Q−1
l + (sl −Q−1l yl)sTl + sl(sl −Q−1
l yl)TsTl ys
− yTl (sl −Q−1l yl)slsTl
(sTl yl)2 (3.18)
=(I − sly
Tl
sTl yl
)Q−1l
(I − sly
Tl
sTl yl
)T+ sls
Tl
sTl yl
3.6 Numerical examplesIn this section we test our nonsmooth algorithm on a variety of stabilization problemsfrom the literature. We use variants I and II of the descent algorithm in the followingapplications, with the default parameters values (unless other values are specified):
ρ = 0.8, δ = 0.1, εθ = 10−5, εα = 10−6, εK = 10−6 and β = 0.9

70 Chapitre 3. Techniques non lisses pour la stabilisation des systèmes linéaires
Algorithm 2 Variant II descent type algorithm for the closed-loop spectral abscissa.Set the parameters ρ ∈ [0, 1], Q0 0, K0 ∈ K, εθ, εα, εK > 0, β ∈]0, 1[.Set the counter l← 0.
1. Compute α (Ac (K0)), the enriched active index set Jρ(K0), the corresponding sub-gradients φj(K0), and the subgradient of minimal norm g0 in ∂(α Ac)(K0).
2. Solve (3.16) for K = Kl and get the search direction H(Kl) from (3.17).If θ(Kl) ≥ −εθ then stop.
3. Find a step length tl > 0 satisfying the Armijo line search condition
α(Ac(Kl + tlH(Kl)
))≤ α (Ac (Kl)) + βtlθ(Kl)
(try tl = 1 first)
4. Set Kl+1 ← Kl + tlH(Kl).Compute α (Ac (Kl+1)), the enriched active index set Jρ(Kl+1), the correspondingsubgradients φj(Kl+1), and the subgradient of minimal norm gl+1 in ∂(αAc)(Kl+1).
5. Compute Q−1l+1 with the BFGS update formula (3.18).
6. If α (Ac (Kl)) − α (Ac (Kl+1)) ≤ εα(1 + α (Ac (Kl))) and ‖Kl −Kl+1‖ ≤εK (1 + ‖Kl‖)then stop.Otherwise set l← l + 1 and go back to 2.
We compare the performance of our method with that of other minimization algorithms,namely multi-directional search (MDS), two algorithms implemented in the Matlab Op-timization Toolbox, and the Matlab package HIFOO [32].
Multidirectional search (MDS) belongs to the family of direct search algorithms [136].This derivative-free method explores the controller space via successive geometric trans-formations of a simplex (contraction, expansion and reflection). Its convergence to a localminimum is established for C1-functions, but nonsmoothness can make it converge to anondifferentiable and nonoptimal point [137], called a dead point. In [6] we have shownhow to combine MDS with nonsmooth descent steps in order to avoid this difficulty andguarantee convergence. Here we use MDS with two stopping criteria: the first is based onthe relative size of the simplex: maxi‖vi−v0‖
max(1,‖v0‖) < ε1 where vi are the vertices of the simplex,and v0 is the vertex of smallest function value of the objective f . The second stopping testquantifies the function value variations over the vertices: maxi f(vi)−f(v0)
max(1,|f(v0)|) < ε2. Experimentswere performed with ε1 = ε2 = 10−6, and two simplex shapes (MDS 1: right-angled, MDS2: regular).
Secondly, two Matlab Optimization Toolbox functions have been tested, one designedfor general constrained optimization (fmincon), the second suited for min-max problems(fminimax). Both functions are essentially based on SQP algorithm with BFGS, linesearch and an exact merit function, see [96]. The finite constrained cast of (3.4) passed

3.6. Numerical examples 71
to fmincon is
mint ∈ RK ∈ K
t subject to Re (λi(A+BKC)) ≤ t for all 1 ≤ i ≤ n
Equivalently, the min-max formulation used for fminimax is
minK∈K
max1≤i≤n
Re (λi(A+BKC))
Clearly here we make the implicit assumption that all the eigenvalues are simple in orderto work with smooth constraints or maximum of smooth functions, which is required bySQP. Our testing will show whether the toolbox functions run into difficulties in thosecases where this hypothesis is violated.
Finally, we use the Matlab package HIFOO (version 1.0). As discussed in [32], theunderlying algorithm consists in a succession of (at most) three optimization phases:BFGS, local bundle (LB) and gradient sampling (GS). By virtue of its probabilistic nature,HIFOO does not return the same final controller even when started from the same initialguess. We noticed that for the same reason the number of evaluations of the spectralabscissa could greatly change from one run to the other, even when all the settings areunchanged. This probabilistic feature of HIFOO is inherent to the multiple starting pointstrategy (by default, 3 random controllers, in addition to the user input), and to thegradient sampling algorithm itself. The first stabilizing controller is obtained with theparameter ’+’, whereas the final one is with ’s’. The iteration number of each stage isgiven as BFGS+LB+GS.
As we have indicated before, final controllers are not necessarily local minimizers ofαAc. The optimality is less import in practice than in design problems with performancecriteria. However, we discuss the status of every termination case in terms of activeeigenvalues multiplicity, and of associated eigenspaces dimension.
3.6.1 Academic testWe begin with an academic 2nd order SISO plant from the output feedback literature [89],cited in [85] (example NN2), and representing a damped linear oscillator. The open-loopplant is marginally unstable, with two pure imaginary modes (λ1 = i and λ2 = −i). Theclosed-loop state matrix is
Ac(K) = A+BKC =[
0 1−1 K
]
For K ∈ R \ [−2, 2] (resp. K ∈ ]−2, 2[), Ac(K) is diagonable with two real eigenvaluesλ = K
2 ±√K2 − 4 (resp. two complex conjugate eigenvalues λ = K
2 ± i√
4−K2), andthus α Ac is Clarke regular. This is not the case at K = −2 (resp. K = 2), where theeigenvalues of Ac(K) coalesce into the double root λ = −1 (resp. λ = 1). For these twocontroller values, α Ac looses Lipschitz continuity, and the Clarke subdifferential is notdefined.

72 Chapitre 3. Techniques non lisses pour la stabilisation des systèmes linéaires
Nonsmooth optimization algorithm (variant I)
We have α Ac(K) = K2 +
√[K2 − 4]+. The global minimum is attained at K = −2, for
which the θ based optimality certificate is unfortunately useless. Yet for K /∈ −2, 2,the stabilization algorithm provides a descent direction and allows to compute a descentstep. We have tried various initial controller values K0, taken on different pieces of thespectral abscissa curve.
For every given K0, the algorithm converges to the global minimum. As soon asthe relative step length and the relative spectral abscissa decrease are small enough, thealgorithm stops.
K0 -5 0 2 5first α < 0 −2.09 · 10−1 −2.50 · 10−1 −2.50 · 10−1 −5.73 · 10−1
(iter.) (0) (1) (1) (3)final α −1.00 −1.00 −1.00 −1.00(iter.) (30) (17) (17) (17)
fun. evaluations 117 71 72 70final θ −1.25 · 10−1 −1.25 · 10−1 −1.25 · 10−1 −1.25 · 10−1
final extended set size 1 1 1 1final active set size 1 1 1 1
Table 3.1: Damped linear oscillator stabilization, nonsmooth algorithm variant I, variousinitial controllers K0.
Surprisingly, even from K0 = 2, our nonsmooth stabilization algorithm converges tothe global minimum, even though Clarke subgradients are not well defined at the firstiteration. Figure 3.1 clearly shows the nonsmooth and even non-Lipschitz behavior of theclosed-loop eigenvalues for K = ±2.

3.6. Numerical examples 73
−5 0 5−5
−4
−3
−2
−1
0
1
2
3
4
5
K
λ i°Ac (
K)
closed−loop eigenvalues
−5 0 5−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Re(λi°A
c (K))
Im(λ
i°Ac (
K))
closed−loop eigenvalues locus
Figure 3.1: Closed-loop eigenvalues variation around K = 0.
Remark 2 For K ∈ −2, 2, the double eigenvalue of Ac(K) is defective but nonderoga-tory. Thus, the closed-loop spectral abscissa is subdifferentially regular, and the set ofregular subgradients of α Ac can be obtained explicitly from the Jordan decomposition,as shown in [41]. We get ∂ (α Ac) (−2) =
[−∞, 1
2
]and ∂ (α Ac) (2) =
[12 ,+∞
]. Even
though the regular subdifferential could be used for characterizing the sharp local minimiz-ers of α Ac (see [33]), the detection and the computation of nontrivial Jordan blocksassociated with active eigenvalues in Ac are numerical challenges. Except for simplisticexamples with exact and integer data, the variational informations for the defective andnonderogatory case are practically out of reach.
Other algorithms
In table 3.2, we give the results obtained with MDS, Matlab Optimization Toolbox, andHIFOO with the initialization K0 = 0.
algorithm MDS 1 fmincon fminimax HIFOOfirst α < 0 −1.00 - −0.25 −0.25(iter.) (1) (-) (1) (1+0+0)final α −1.00 0 −9.95 · 10−1 −1.00(iter.) (21) (198) (5) (8+2+5)
fun. evaluations 44 201 38 308
Table 3.2: Damped linear oscillator stabilization, other algorithms, K0 = 0.

74 Chapitre 3. Techniques non lisses pour la stabilisation des systèmes linéaires
We observe that fmincon fails to converge after 200 function evaluations, and returnsK = −1.84 · 1014. In a second testing, we try to initialize the algorithms with theproblematic controller value K0 = 2 (see table 3.3).
algorithm MDS 1 fmincon fminimax HIFOOfirst α < 0 −1.00 - - −1.49 · 10−8
(iter.) (2) (-) (-) (1)final α −1.00 1.00 1.00 −1.00(iter.) (21) (100) (100) (76+2+5)
fun. evaluations 44 201 201 1212
Table 3.3: Damped linear oscillator stabilization, other algorithms, K0 = 2.
HIFOO finds the global minimum at the BFGS stage, tries in vain to improve itwith local bundle and gradient sampling iterations, but doesn’t give any local optimalitycertificate at the end (local optimality measure is 1.5 · 10−1).
fmincon and fminimax got stuck at K = 2, even after 200 function evaluations. MDSconverged in both cases to the minimizer K = −2, with fewer function evaluations thanthe nonsmooth algorithm: the very small dimension of the search space is favorable tothis direct search technique. In contrast, HIFOO needs many more spectral abscissa callsin order to complete the optimization, without any optimality certificate, as above.
Remark 3 In the one-dimension case here, right-angled and regular simplices are inter-vals, the shape of the simplex has no influence on the MDS algorithm.
3.6.2 Transport airplaneThe linearized plant of 9th-order describes the longitudinal motion of a transport airplaneat given flight conditions (system AC8 from [83], see also [56]). The open loop is unstable,with spectral abscissa α = 1.22 · 10−2, attained by a simple, real mode: the compositefunction α Ac is then differentiable at K0 = DK0 = 0 (all the other modes are stable,with real parts between −5.00 · 101 and −3.18 · 10−2).
Nonsmooth optimization algorithm (variant I)
In table 3.4, we show the influence of the ratio ρ (see (3.10)) on the nonsmooth algorithm(variant I here). Notice that the first case (ρ = 0) is steepest descent.
In each of the first two cases, the final value of θ is not reliable for optimality, becauseα Ac looses Clarke regularity. This is suggested by the graphical representation ofα Ac around the final controller, along a chosen direction (see figure 3.2 for the 0.1 %

3.6. Numerical examples 75
case # 1 2 3 4ratio ρ 0 % 0.1 % 1 % 2 %
first α < 0 −7.07 · 10−2 −1.07 · 10−2 −1.18 · 10−2 −1.05 · 10−2
(iter.) (1) (1) (1) (1)final α −1.15 · 10−1 −1.43 · 10−1 −1.30 · 10−1 −4.45 · 10−1
(iter.) (20) (27) (16) (9)fun. evaluations 96 121 63 43
final θ −1.54 · 102 −1.30 · 101 −3.10 · 10−1 −5.60 · 10−17
final extended set size 1 2 4 4final active set size 1 1 1 2
Table 3.4: Transport airplane stabilization, nonsmooth algorithm variant I, various activeset extensions.
enlargement case), and further confirmed by inspection of closed-loop modes: two complexconjugate eigenvalues with small imaginary parts are active (λ1 = −1.43·10−1+1.15·10−4iand λ2 = λ1) and they are very near from coalescence into a defective real eigenvalue.
−0.05 0 0.05−0.15
−0.14
−0.13
−0.12
−0.11
−0.1
−0.09
δ K
α°A
c (K
+δK
H)
closed−loop spectral abscissa
−0.25 −0.2 −0.15 −0.1−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
0.1
Re(λi°A
c(K+δK H))
Im(λ
i°Ac(K
+δK
H))
closed−loop eigenvalues locus(3 largest real parts eigenvalues)
Figure 3.2: Closed-loop eigenvalues variation around final K along H = [1, 0, 0, 0, 0](0.1 % enlargement).
The fourth case is more favorable. The enlargement of Aρ(K) generates better descentdirections for α Ac and allows longer descent steps and fewer iterations. The final valueof θ is close to zero, indicating local optimality. There are three active eigenvalues atthe last iteration: two of them are complex conjugate (λ1 = −4.45 · 10−1 + 4.40 · 10−3i

76 Chapitre 3. Techniques non lisses pour la stabilisation des systèmes linéaires
and λ2 = λ1), the other one is real (λ3 = −4.45 · 10−1). We notice that these threemodes come directly from the plant, and are not controllable. This is confirmed by theassociated closed-loop subgradients, φ1 = φ2 ≈ 0 and φ3 ≈ 0, leading to a singletonsubdifferential ∂(α Ac)(K9) = 0. The final point is then smooth, in spite of multipleactive eigenvalues, and the uncontrollability of the active modes gives a global optimalitycertificate (see Remark 1, section 3.3.1). As an illustration, see figure 3.3.
−0.05 0 0.05−0.445
−0.44
−0.435
−0.43
−0.425
−0.42
−0.415
−0.41
−0.405
−0.4
−0.395
δ K
α°A
c (K
+δK
H)
closed−loop spectral abscissa
−0.55 −0.5 −0.45 −0.4
−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
Re(λi°A
c(K+δK H))
Im(λ
i°Ac(K
+δK
H))
closed−loop eigenvalues locus(6 largest real parts eigenvalues)
3 uncontrollable modes
Figure 3.3: Closed-loop eigenvalues variation around final K along H = [1, 0, 0, 0, 0](2 % enlargement).
Other algorithms
Here the algorithms were initialized with K0 = 0, and the multidirectional search (MDS)algorithm was applied with two different shapes of simplices in the controller space.
algorithm MDS 1 MDS 2 fmincon fminimax HIFOOfirst α < 0 −1.09 · 10−1 −1.04 · 10−2 −4.45 · 10−1 −1.13 · 10−2 −2.62 · 10−2
(iter.) (3) (7) (13) (1) (1+0+0)final α −4.21 · 10−1 −1.57 · 10−1 −4.45 · 10−1 −4.45 · 10−1 −2.31 · 10−1
(iter.) (36) (37) (13) (25) (396+3+2)fun. eval. 366 376 32 131 1140
Table 3.5: Transport airplane stabilization, other algorithms.
MDS becomes very greedy in function evaluations, as the controller size increases inthis example. Moreover, the global minimum is not found, either because of an unsuc-cessful local minimum, or a dead point.

3.6. Numerical examples 77
Both Matlab functions return the global minimum, after very few iterations for fmincon.HIFOO terminates far from the global minimum, because slow convergence occurs:
numerous BFGS iterations (99) are needed for each of the four initial controllers (K0 = 0and three perturbed K0). The final optimality measure is 5.28 · 10−4.
3.6.3 VTOL helicopterThis model (HE1 from [85]) with four states, one measurement and two control variables,describes the longitudinal motion of a VTOL (Vertical Take-Off and Landing) helicopter,at given flight conditions. The open-loop spectral abscissa is α = 2.76 · 10−1, attained bytwo complex conjugate eigenvalues. All the open-loop eigenvalues are simple.
Nonsmooth optimization algorithm (variants I and II)
Algorithm variant I II (with BFGS)first α < 0 −6.16 · 10−2 −6.16 · 10−2
(iter.) (1) (1)final α −2.39 · 10−1 −2.47 · 10−1
(iter.) (216) (26)fun. eval. 796 90final θ −9.77 · 10−6 −1.70 · 10−6
Table 3.6: VTOL helicopter stabilization, nonsmooth algorithm, variants I and II.
Using variant I, the closed-loop becomes stable after the first iteration, and the spectralabscissa decreases slowly until satisfaction of the local optimality stopping test. This slowconvergence strongly calls for variant II of our nonsmooth descent algorithm, which findsa lower closed-loop spectral abscissa with much less iterations. For both cases, the valueclose to 0 of θ indicates local optimality.
The final closed-loop spectrum at convergence obtained by algorithm variant I is
Λ =−2.39 · 10−1 ± 5.76 · 10−1i,−2.39 · 10−1,−7.91 · 101
,
and the subgradients associated with µ1 = −2.39 · 10−1 + 5.76 · 10−1i and with µ3 =−2.39 · 10−1 are, respectively,
φ1 = φ2 =[−1.26 · 10−1
+2.92 · 10−2
], φ3 =
[+6.26 · 10−2
−1.55 · 10−2
].
Convergence analysis is favorable for our algorithm, because the nonsmoothness comesfrom several simple active eigenvalues for the closed-loop spectral abscissa: the Clarkesubdifferential is then well defined and the value of θ(K) is reliable as an optimalitycriterion.
A plot in the neighborhood of the convergence point of variant I (see figure 3.4) clearlyshows the nonsmoothness at optimality.

78 Chapitre 3. Techniques non lisses pour la stabilisation des systèmes linéaires
2 2.5 3 3.5 410.51111.51212.5
−0.24
−0.22
−0.2
−0.18
−0.16
−0.14
−0.12
−0.1
−0.08
−0.06
K1
closed−loop spectral abscissaaround variant I local minimum
K2
α(A
+B
[K1;
K2]
C)
Figure 3.4: Closed-loop spectral abscissa around optimal K of variant I algorithm.
Other algorithms
The same closed-loop spectral abscissa is found by MDS (with regular simplex shape),the Matlab routines, which are very efficient in this example, and by HIFOO (with finallocal optimality measure 9.87 · 10−4). Notice that iterates of fmincon become feasibleonly at the last iteration, a classical feature of SQP algorithms.
algorithm MDS 1 MDS 2 fmincon fminimax HIFOOfirst α < 0 −1.23 · 10−1 −9.95 · 10−2 −2.47 · 10−1 −5.09 · 10−2 −6.16 · 10−2
(iter.) (1) (1) (36) (1) (1+0+0)final α −1.35 · 10−1 −2.47 · 10−1 −2.47 · 10−1 −2.47 · 10−1 −2.46 · 10−1
(iter.) (15) (58) (36) (36) (116+0+0)fun. eval. 63 235 73 73 216
Table 3.7: VTOL helicopter stabilization, other algorithms.
The same closed-loop spectral abscissa is found by MDS (with regular simplex shape),the Matlab routines, which are very efficient in this example, and by HIFOO (with finallocal optimality measure 9.87 · 10−4). Notice that iterates of fmincon become feasibleonly at the last iteration, a classical feature of SQP algorithms.
3.6.4 B-767 airplaneOur last example taken from [85] (system AC10) is of higher order (55 states), with twocontrolled inputs and two measured outputs. The state-space data describe a modified

3.6. Numerical examples 79
Boeing B-767 at flutter condition (see [46]). The open-loop is unstable, but the only activeeigenvalues of A for the spectral abscissa are µ1 = 1.015 · 10−1 and µ1, with multiplicityone.
Nonsmooth optimization algorithm (variants I and II)
We use algorithm variants I and II, with all gains of the initial controller set to 0. The twoversions of our algorithm stabilize the plant after a single iteration. If the optimizationis continued, variant II gives fast convergence to a local minimum (certified by the smallvalue of θ). Variant I is slower here.
Algorithm variant I II (with BFGS)first α < 0 −2.37 · 10−2 −2.36 · 10−2
(iter.) (1) (1)final α −7.99 · 10−2 −3.50 · 10−2
(iter.) (99) (29)fun. eval. 387 111final θ −8.00 · 10−4 −8.70 · 10−6
Table 3.8: B-767 airplane stabilization, nonsmooth algorithm, variants I and II.
Other algorithms
See table 3.9.
algorithm MDS 1 MDS 2 fmincon fminimax HIFOOfirst α < 0 −3.59 · 10−3 −2.35 · 10−2 −2.47 · 10−2 −2.36 · 10−2 −2.34 · 10−2
(iter.) (2) (13) (3) (1) (1+0+0)final α −3.23 · 10−2 −3.54 · 10−2 −3.44 · 10−2 −5.24 · 10−2 −3.62 · 10−2
(iter.) (60) (100) (9) (15) (132+3+15)fun. eval. 485 805 21 31 1858
Table 3.9: B-767 airplane stabilization, other algorithms.
3.6.5 PID controllersAs our algorithm can handle controller structure (see 3.3.3), it offers an interesting frame-work for PID controller design, particularly attractive for MIMO plants where very fewgeneric tuning techniques are available. In this example, we seek a 3 input, 3 outputstabilizing PID controller for an open-loop marginally unstable aircraft model (AC2 from[85]), given as:
K(s) = KP + 1sKI + s
1 + εsKD
where KP , KI , KD ∈ R2×2 and ε > 0. The algorithm is initialized with KP = 0,KI = KD = I3 and ε = 10−3. The resulting closed-loop is unstable (α(Ac(K)) = 8.06).

80 Chapitre 3. Techniques non lisses pour la stabilisation des systèmes linéaires
The algorithm (variant I) finds a stabilizing PID controller after 2 iterations. It stopsafter 42 iterations, with:
KP =
72.23 4.62 −28.6917.89 −3.93 33.7033.65 13.17 114.77
,
KI =
−41.38 3.80 −102.4523.93 −3.82 42.7511.79 18.42 −20.37
,
KD =
0.91 0 00 0.91 00 0 0.91
, ε = 9.55 · 10−4
The final closed-loop spectral abscissa is α = −6.03 · 10−1. Notice that KD and ε arenearly unchanged.
3.7 ConclusionFormulated as an optimization program, static or fixed-structure output feedback sta-bilization has been solved for several case studies from the literature. The proposednonsmooth algorithm addresses the nonsmoothness of the spectral abscissa and generatessuccessive descent steps. Even if the theoretical assumption of semisimple active eigen-values may seem restrictive, the experimental results show that very few nonsmooth stepswill generally yield a stabilizing static controller. Our framework is generic enough tohandle realistic stabilization problems with structured compensators. The two proposedvariants are deterministic and numerically efficient, with significantly fewer evaluationsof the spectral abscissa than MDS or HIFOO. Finally, although BFGS is designed forsmooth optimization, we noticed that it performs quite well for static output feedbackstabilization (in variant II, in the initial phase of HIFOO and in the Matlab optimizationtools), agreeing with [32].

Chapitre 4
Optimisation non lisse pour lacommande structurée, application auloop-shaping par correcteur de type
PID
L’algorithme non lisse présenté dans le chapitre précédent pour la stabilisation a étéconçu originellement dans le but de résoudre le problème de la synthèse H∞ (voir [8]). Ilest plus délicat à mettre en œuvre dans ce contexte, car le problème minimax sous-jacentest semi-infini. Il est aussi plus adapté, car, sans hypothèse particulière, la norme H∞ dutransfert en boucle fermée est localement lipschitzienne, et admet donc en tout point unsous-différentiel au sens de Clarke. Comme pour la stabilisation, notre approche par op-timisation locale permet de prendre en compte en amont, c’est-à-dire dans toute la phasede synthèse du correcteur, une structure particulière de la boucle fermée ou de la loi decommande elle-même. Elle peut être d’ordre fixé, ou suivre un certain formalisme (PID,pôles/zéros, etc.). Ces spécifications peuvent généralement se traduire par une paramétri-sation continûment différentiable du correcteur qui, grâce à la règle de différentiation enchaîne pour le sous-différentiel de Clarke, s’intègre dans le processus d’optimisation.
Nous proposons dans l’article qui suit d’illustrer la flexibilité de cette approche à tra-vers la commande par loop-shaping d’un réacteur chimique, à l’aide d’un correcteur detype PID. Dans ce type d’application, des spécifications fréquentielles portent sur le profildes valeurs singulières en boucle ouverte. Ces spécifications sont introduites par l’ajoutde fonctions de pondération dynamiques en entrée et en sortie, ce qui a pour effet defaire croître artificiellement l’ordre du système à commander. La synthèse de correcteursd’ordre réduit (et, plus généralement, de structure fixée) est donc particulièrement sou-haitable dans le cadre du loop-shaping. Grâce à l’apport théorique de l’Optimisation nondifférentiable, nous traitons directement ce problème de commande structurée dans l’es-pace des paramètres du correcteur PID. A la convergence de l’algorithme de descente,l’optimalité locale vis à vis de la norme H∞ est garantie.
Nous montrons aussi qu’il est possible de tester l’optimalité locale d’un correcteurPID donné, pour le critère H∞. Nous vérifions ainsi, en particulier, que les méthodesheuristiques procédant par des résolutions alternées de programmes semi-définis convexes
81

82 Chapitre 4. Optimisation non lisse pour la commande structurée
(méthodes dites de descentes coordonnées) s’arrêtent en des points non optimaux. Notrealgorithme de descente non lisse permet d’en poursuivre l’optimisation, et converge avecune norme H∞ γ localement minimale (c’est-à-dire une marge de stabilité ε = 1
γlocale-
ment maximale).

83
Nonsmooth structured control designwith application to PID loop-shaping
of a processP. Apkarian, V. Bompart and D. Noll
Article publié dans International Journal of Robust and Nonlinear Control,17(14) :1320-1342, 2007.
AbstractFeedback controllers with specific structure arise frequently in applications because theyare easily apprehended by design engineers and facilitate on-board implementations andre-tuning. This work is dedicated to H∞ synthesis with structured controllers. In thiscontext, straightforward application of traditional synthesis techniques fails, which ex-plains why only a few ad-hoc methods have been developed over the years. In response,we propose a more systematic way to design H∞-optimal controllers with fixed struc-ture using local optimization techniques. Our approach addresses in principle all thosecontroller structures which can be built into mathematical programming contraints. Weapply nonsmooth optimization techniques to compute locally optimal solutions, and pro-vide practical tests for descent and optimality. In the experimental part we apply ourtechnique to H∞ loop-shaping PID controllers for MIMO systems and demonstrate itsuse for PID control of a chemical process.
NotationLet Rn×m be the space of n×m matrices, equipped with the corresponding scalar product〈X, Y 〉 = Tr(XTY ), where XT is the transpose of the matrix X, Tr (X) its trace. Forcomplex matrices XH stands for its conjugate transpose. For Hermitian or symmetricmatrices, X Y means that X − Y is positive definite, X Y that X − Y is positivesemi-definite. We use the symbol λ1 to denote the maximum eigenvalue of a symmetric orHermitian matrix. Given an operator T , T ∗ is used to denote its adjoint operator on theappropriate space. The notation vec applied to a matrix stands for the usual column-wisevectorization of a matrix. The operator diag applied to a matrix produces a vector whoseentries are the diagonal elements of the matrix. We use concepts from nonsmooth analysiscovered by [44]. For a locally Lipschitz function f : Rn → R, ∂f(x) denotes its Clarkesubdifferential at x.

84 Chapitre 4. Optimisation non lisse pour la commande structurée
4.1 IntroductionConsiderable efforts have been made over the past two decades to develop new and pow-erful control methodologies. H∞ synthesis [47] is certainly the most prominent outcomeof this search. In spite of its theoretical success, it turns out that structured controllerssuch as PID, lead-lag, observed-based, and others, are still preferred in industrial control.The reason is that controllers designed with modern control techniques are usually of highorder, difficult to implement and often impossible to re-tune in case of model changes.But those are precisely the properties which make structured controllers so popular forpractitioners. Easy to implement and to understand, and easy to re-tune whenever per-formance or stability specifications change. The trade-off may be roughly described ashigh performance combined with low flexibility versus lower performance combined withhigh flexibility. The question we ask here is how the performance properties of structuredcontrollers may be improved.
Structured control design is generally a difficult problem. Even the simple static outputfeedback stabilization problem is known to be NP-hard [24]. Due to their importance forpractice, a number of innovative techniques and heuristics for structured control have beenproposed in the literature. Some authors use branch-and-bound techniques to constructglobally optimal solution to the design problem [17]. In the same vein, Wong and Bigras[139] propose evolutionary optimization to reduce the computational overhead, while stillaiming at globally optimal solutions. These approaches are certainly of interest for smallproblems, but quickly succumb when problems get sizable.
A fairly disparate set of heuristic techniques for structured control design was de-veloped in the realm of linear matrix inequalities (LMIs) [30]. Alternating projectiontechniques were proposed in [62] for static controller and for the more specific structuredcontrol design problem in [48]. In the same vein, coordinate descent schemes were pro-posed in [60, 74, 64]. In [65], the authors suggest using a BMI formulation for solvinga variety of problems including structured control. These techniques may be useful inpractice, but they bear the risk of missing a local solution, because convergence to a localminimum is rarely ensured. Iterative solving of SDPs based on successive linearizationsis yet another idea, but often leads to prohibitive running times. In [19], 2 hours cputimewere necessary to compute a decentralized PID controller for a 2×2 process on a PentiumII 333 MHz computer. Even longer cputimes are reported in [57] for medium size PIDdesign problems.
A relatively rich literature addresses specific controller structures such as decentralizedor PIDs. In [101], Miyamoto and Vinnicombe discuss a coordinate scheme for H∞ loop-shaping with decentralized constraints. In [132], again in the loop shaping context, theauthors adopt a truncation procedure to reduce a full-order controller to a PID controller.Those are heuristic procedures, because closed-loop performance is not necessarily inher-ited by the final controller. In [123], Saeki addresses sufficient conditions under whichPID synthesis reduces to solving LMIs.
In a recent interesting work, Rotkowitz and Lall [122] fully characterize a class ofproblems for which structured controller design can be solved using convex programming.They introduce the concept of quadratic invariance and show that for problems havingthis property, optimal structured controllers may be efficiently synthesized. In a different

4.2. Nonsmooth H∞ design technique 85
but related work [140], the authors identify various control structures that are amenableto convex optimization by an appropriate choice of coprime factors in the Youla-Kuceraparametrization [29]. A similar analysis is made by Scherer in [126] both for structuredcontroller design and multi-objective H∞ control. Unfortunately, these concepts and toolsonly apply to very particular problem classes and controller patterns and do not easilylend themselves to generalization when finer controller structures are required.
Tw→z(K) :=
G
K
yu
w z
Figure 4.1: Standard interconnection.
In our opinion local optimization is the approach best suited for these difficult designproblems. It should whenever possible be used in tandem with heuristic methods, asthose may be useful to compute good initial points for the optimization. We mentionthat early approaches to structured design based on tailored optimization techniques canbe traced back to the work of Mäkilä and Toivonen [93] for parametric LQ problems, orPolak and Wardi [117] for problems with frequency domain singular value inequalities.In the latter reference, many design problems are recognized as nondifferentiable, and inconsequence, techniques from nonsmooth analysis are employed. More recently, we haveused nonsmooth analysis to fully caracterize the subdifferential properties of closed-loopmappings of the form ‖.‖∞ Tw→z acting on the controller space, where Tw→z(K) denotesthe closed-loop transfer function from w to z at a given controller K, figure 4.1. Theseresults are used to develop nonsmooth descent algorithms for various design problems[8, 9, 10]. Here we extend our results to structured controller design and elaborate thecase of MIMO PID controllers. We then demonstrate how the proposed technique can beused in the context of PID loop-shaping as introduced in [98, 57]. We conclude with anapplication to chemical process control.
4.2 Nonsmooth H∞ design techniqueConsider a plant P in state-space form
P (s) :
xzy
=
A B1 B2C1 D11 D12C2 D21 D22
xwu
, (4.1)
where x ∈ Rn is the state vector of P , u ∈ Rm2 the vector of control inputs, w ∈ Rm1
the vector of exogenous inputs, y ∈ Rp2 the vector of measurements and z ∈ Rp1 the

86 Chapitre 4. Optimisation non lisse pour la commande structurée
controlled or performance vector. Without loss, it is assumed throughout that D22 = 0.The focus is on H∞ synthesis with structured controllers, which consists in designing
a dynamic output feedback controller K(s) with feedback law u = K(s)y for the plant in(4.1) having the following properties:
• Controller structure: K(s) has a prescribed structure.
• Internal stability: K(s) stabilizes the original plant P (s) in closed-loop.
• Performance: Among all stabilizing controllers with that structure, K(s) mini-mizes the H∞ norm ‖Tw→z(K)‖∞. Here Tw→z(K) denotes the closed-loop transferfunction from w to z.
4.2.1 Subdifferential of the H∞ mapFor the time being we leave apart structural constraints and assume that K(s) has thefrequency domain representation:
K(s) = CK(sI − AK)−1BK +DK , AK ∈ Rk×k, (4.2)
where k is the order of the controller, and where the case k = 0 of a static controllerK(s) = DK is included. A further simplification is obtained if we assume that preliminarydynamic augmentation of the plant P (s) has been performed:
A→[A 00 0k
], B1 →
[B10
], etc.
so that manipulations will involve a static matrix
K ,[AK BK
CK DK
]. (4.3)
With this proviso, the following closed-loop notations will be useful:[A(K) B(K)C(K) D(K)
],[A B1C1 D11
]+[B2D12
]K[C2 D21
]. (4.4)
Owing to its special composite structure, the function f = ‖.‖∞ Tw→z, which mapsthe set D ⊂ R(m2+k)×(p2+k) of stabilizing controllers into R+, is Clarke subdifferentiable[104, 8, 7]. Its Clarke subdifferential can be described as follows. Introduce the set ofactive frequencies at a given K
Ω(K) , ω ∈ [0,+∞] : σ (Tw→z(K, jω)) = f(K). (4.5)
We assume throughout that Ω(K) is a finite set and we refer the reader to [27] for ajustification of this hypothesis. We shall also need the notation:[Tw→z(K, s) G12(K, s)G21(K, s) ?
],
[C(K)C2
](sI −A(K))−1
[B(K) B2
]+[D(K) D12D21 ?
].
(4.6)This leads to the following result

4.2. Nonsmooth H∞ design technique 87
Theorem 4.2.1 Assume the controller K(s) stabilizes P (s) in (4.1), that is, K ∈ D.With the notations (4.5) and (4.6), let Qω be a matrix whose columns form an orthonormalbasis of the eigenspace of Tw→z(K, jω)Tw→z(K, jω)H associated with the largest eigenvalueλ1(Tw→z(K, jω)Tw→z(K, jω)H
)= σ(Tw→z(K, jω))2. Then, the Clarke subdifferential of
the mapping f at K ∈ D is the compact and convex set ∂f(K) = ΦY : Y ∈ S(K), where
ΦY = f(K)−1 ∑
ω∈Ω(K)Re
G21(K, jω)Tw→z(K, jω)HQωYω(Qω)HG12(K, jω)
T, (4.7)
and S(K) is the spectraplex set
S(K) , Y = (Yω)ω∈Ω(K) : Yω = (Yω)H 0,∑
ω∈Ω(K)TrYω = 1. (4.8)
Proof: The proof is based on the chain rule for the Clarke gradient of the compositemapping f = ‖.‖∞ Tw→z and we refer the reader to [44] and [116, 8, 7] for a proof andfurther details.
In geometric terms, the subdifferential of f is a linear image of the spectraplex setS(K). We shall see later that it reduces to a more familiar geometric set under additionalassumptions on the multiplicity of the singular values.
4.2.2 Structured controllersNote that we have assumed so far that controllers have no specific structure. We nowextend the results in section 4.2.1 to structured controllers using chain rules.
Assume K defined in (4.3) depends smoothly on a free parameter κ ∈ Rq, that is,K = K(κ), where K(·) is smooth. Then the subgradients with respect to κ of the mappingg = ‖.‖∞ Tw→z(.) K(.) at κ are obtained as K′(κ)∗∂f(K), where ∂f(K) is given inTheorem 4.2.1, K′(κ) is the derivative of K(·) at κ, and where K′(κ)∗ is its adjoint. Thisis a direct application of the chain rule in [44]. Note that the adjoint K′(κ)∗ acts onelements F ∈ R(m2+k)×(p2+k) via
K′(κ)∗F =[Tr (∂K(κ)
∂κ1
TF ), . . . ,Tr (∂K(κ)
∂κq
TF )]T
.
We infer the following
Corollary 4.2.2 Assume the controller K(κ) stabilizes P (s) in (4.1), that is, K(κ) ∈ D.With the notations of Theorem 4.2.1, the Clarke subdifferential of the mapping g = ‖.‖∞ Tw→z(.) K(.) at κ ∈ Rq is the compact and convex set
∂g(κ) =[
Tr (∂K(κ)∂κ1
TΦY ), . . . ,Tr (∂K(κ)∂κq
TΦY )]T
: ΦY ∈ ∂f(K(κ)). (4.9)
Using vectorization, the subgradients in (4.9) can be rewritten as[vec ∂K(κ)
∂κ1, . . . , vec ∂K(κ)
∂κq
]Tvec ΦY . (4.10)

88 Chapitre 4. Optimisation non lisse pour la commande structurée
An important special case in practice is when the maximum singular values
σ(Tw→z(K(κ), jω))
have multiplicity one for every ω ∈ Ω(K(κ)). Then the subgradients ΦY reduce in vectorform to vec ΦY = Ψ ξ where ∑ω∈Ω(K(κ)) ξω = 1, ξω ≥ 0,∀ω ∈ Ω(K(κ)) and matrix Ψ isconstructed columnwise as
Ψ ,(vec Re
G21(K, jω)Tw→z(K, jω)HQω(Qω)HG12(K, jω)
T)
ω∈Ω(K(κ)).
Combining this expression with (4.10), the subdifferential ∂g(κ) at κ admits a simplerrepresentation in the form of a linear image of a simplex
∂g(κ) =[vec ∂K(κ)
∂κ1, . . . , vec ∂K(κ)
∂κq
]TΨ ξ :
∑
ω∈Ω(K(κ))ξω = 1, ξω ≥ 0, ∀ω ∈ Ω(K(κ))
.
4.2.3 PID controllersIf this section we specialize the above results to PID controllers. A common representationof MIMO PID controllers is
K(s) = Kp + Ki
s+ Kds
1 + εs, (4.11)
where Kp, Ki and Kd are the proportional, the integral and the derivative gains, re-spectively. The PID gains Kp, Ki and Kd all belong to Rm2×m2 for a square plant withm2 inputs and outputs. ε is a small scalar which determines how close the last term in(4.11) comes to a pure derivative action. Using partial fraction expansion, an alternativerepresentation can be obtained in the form
K(s) = DK + Ri
s+ Rd
s+ τ, (4.12)
with the correspondence
DK , Kp + Kd
ε, Ri , Ki, Rd , −Kd
ε2, τ , 1
ε.
Note that these two representations are in one-to-one correspondence via
Kd = −ε2Rd, Kp = DK + εRd, Ki = Ri, ε = 1τ.
From (4.12) we obtain a linearly parameterized state-space representation of a MIMOPID controller
K =[AK BK
CK DK
]=
0 0 Ri
0 −τI Rd
I I DK
, AK ∈ R2m2×2m2 . (4.13)

4.2. Nonsmooth H∞ design technique 89
Since the state-space representation of the PID controller is affine in the parameters τ ,Ri, Rd and Dk, the same is true for its vectorized form and we can write
vec[AK BK
CK DK
]= vec
0 0 00 0 0I I 0
+ T
κ︷ ︸︸ ︷
τvecRi
vecRd
vecDK
,
for a suitable matrix T ∈ R(k+m2)(k+p2)×(3m22+1). The linear part of (4.13) can be expanded
as
0−I0
τI
0I0
T
+
I00
Ri
00I
T
+
0I0
Rd
00I
T
+
00I
DK
00I
T
.
In consequence, using the Kronecker product to convert matrix products into vectors, weobtain the transformation
T =
0I0
⊗
0−I0
vec I
00I
⊗
I00
00I
⊗
0I0
00I
⊗
00I
.
Finally, the subdifferential of the mapping g = ‖.‖∞ Tw→z(.) K(.) at κ, where K(κ)describes a MIMO PID controller (4.11) or (4.12) above, is the compact and convex setof subgradients
∂g(κ) =T T vec ΦY : ΦY ∈ ∂f(K(κ))
. (4.14)
For a decentralized MIMO PID controller, Ri, Rd and DK reduce to diagonal matrices.Introducing the linear transformation
J ,[e1 ⊗ e1 . . . em2 ⊗ em2
],
where (ei)i=1,...,m2 is the canonical basis of Rm2 , it is easily verified that
vecM = J [M11,M22, . . . ,Mm2m2 ]T
for any square matrix M of size m2. This leads to
τvecRi
vecRd
vecDK
=
L︷ ︸︸ ︷
1 0 0 00 J 0 00 0 J 00 0 0 J
κ︷ ︸︸ ︷
τvec diagRi
vec diagRd
vec diagDK

90 Chapitre 4. Optimisation non lisse pour la commande structurée
with the new parameter vector κ as indicated above. Again by the chain rule for Clarkesubdifferentials, we obtain that the subdifferential of the mapping g = ‖.‖∞Tw→z(.)K(.)at κ, where K(κ) describes a MIMO decentralized PID controller stabilizing (4.1), is thecompact and convex set of subgradients
∂g(κ) =LTT T vec ΦY : ΦY ∈ ∂f(K(κ))
.
We emphasize that the outlined procedure to determine subdifferentials of varioustypes of PID controllers is general and encompasses most controller structures. In partic-ular, this includes all structures K = K(κ) with a differentiable parametrization K(·). Inaddition, in some cases the parameter κ ∈ Rq may be restricted to a contraint subset ofRq.
4.2.4 Setpoint filter designDespite the improvement in performance achieved by our new technique, using PID feed-back alone may not be sufficient to meet suitable time-domain constraints. Traditionally,this difficulty is overcome by using a two-degree of freedom strategy including feedbackand prefiltering or setpoint filtering. Setpoint filters operate on the reference signals toimprove responses properties such as settling-time, overshoot and decouplings. In figure4.2, a typical model following strategy is shown. The setpoint filter F (s) is used in such away that the responses of the feedback controlled plant G(s) match as closely as possiblethose of a reference model Gref (s). Finding such a filter could also be cast as an H∞synthesis problem, where the transfer function from the reference signal r to the trackingerror e is minimized:
minimizeF (s)
‖Tr→e(F )‖∞ . (4.15)
+e−
rF (s)
Gref(s)
K(s)+− G(s)
Figure 4.2: Setpoint filter design.
To solve the setpoint filter design problem, we suggest once again the use of nonsmoothoptimization methods. In order to illustrate the construction, consider the case of a two-input two-output system. To achieve decoupling and good quality responses, the setpoint

4.2. Nonsmooth H∞ design technique 91
filter is sought in the form [132],
F (s) =[ 1
τ1s+1a1sb1s+1
a2sb2s+1
1τ2s+1
]. (4.16)
Settingκ1 = 1
τ1, κ2 = 1
b1, κ3 = a1
b1,
κ4 = 1τ2, κ5 = 1
b2, κ6 = a2
b2,
a state-space representation of the filter is obtained as
F(κ) ,[AF BF
CF DF
]=
−κ1 0 0 0 κ1 00 −κ2 0 0 0 −κ30 0 −κ4 0 0 κ40 0 0 −κ5 −κ6 01 κ2 0 0 0 κ30 0 1 κ5 κ6 0
.
This means there exists a matrix U such that
vecF(κ) = vecF(0) + Uκ, κ ∈ R6 .
We immediately deduce the relevant subgradient formulas for program (4.15). Withv , ‖.‖∞ Tr→e(.) F(.), the subdifferential of v at κ, where F(κ) is a setpoint filter, isthe compact and convex set of subgradients
∂v(κ) =UT vec ΦY : ΦY ∈ ∂ (‖.‖∞ Tr→e) (F(κ))
. (4.17)
The remaining expression for the subdifferential is directly obtained from Theorem 4.2.1.
4.2.5 Nonsmooth descent methodIn this section we briefly present our nonsmooth optimization technique for compositefunctions of the H∞-norm. For a more detailed discussion we refer the reader to [8, 9].We start by representing the composite functions f = ‖ · ‖∞ Tw→z or more generallyg = ‖ · ‖∞ Tw→z K(·) under the form
g(κ) = maxω∈[0,+∞]
g(κ, ω),
where each g(κ, ω) is a composite maximum singular value function
g(κ, ω) = σ (G(κ, jω)) .
Here G(κ, jω) = Tw→z (K(κ), jω). At a given parameter κ, we can compute the setΩ(κ) , Ω (K(κ)) of active frequencies, which is either finite, or coincides with [0,+∞] inthose rare cases where the closed-loop system is all-pass. Excluding this case, we assumeΩ(κ) finite and construct a finite extension Ωe(κ) by adding frequencies according to thestrategy presented in [8, 9]. See figure 4.3 for a typical choice.

92 Chapitre 4. Optimisation non lisse pour la commande structurée
Following the general trend of Polak [114], we now define the optimality function
θe(κ) , minh∈Rq
maxω∈Ωe(κ)
maxYω0
Tr(Yω)=1
−g(κ) + g(κ, ω) + hTφYω + 12h
TQh, (4.18)
where for every fixed ω, φYω is a subgradient of g(κ, ω) at κ obtained as
φYω ,[Tr (∂K(κ)
∂κ1
TΦYω), . . . ,Tr (∂K(κ)∂κq
TΦYω)]T,
where
ΦYω = g(κ, ω)−1ReG21(K, jω)Tw→z(K, jω)HQωYω(Qω)HG12(K, jω) , Yω 0,TrYω = 1.
The model of the objective function represented by θe is in principle of first order, butthe quadratic term hTQh may in some cases be used to include second order information.In [8, 9] we had worked with the basic choice Q = δI 0, but we shall propose a moresophisticated choice here using BFGS updates.
Notice that independently of the choices of Q 0 and the finite extension Ωe(κ) ofΩ(κ) used, the optimality function has the following property: θe(κ) ≤ 0, and θe(κ) = 0if and only if 0 ∈ ∂g(κ), that is, κ is a critical point of g. In order to use θe to computedescent steps, it is convenient to obtain a dual representation of θe. To do this we useFenchel duality to swap the max and min operators in (4.18). This means that we firstreplace the first inner supremum by a supremum over a convex hull which does not alterthe value of θe. Then, after swapping max and min, the now inner infimum over h ∈ Rqbecomes unconstrained and can be computed explicitely. Namely, for fixed Yω and τω inthe outer program, we obtain the solution of the form
h(Y, τ) = −Q−1
∑
ω∈Ωe(κ)τωφYω
. (4.19)
Substituting this back we obtain the dual expression
θe(κ) = maxτω≥0∑
ω∈Ωe(κ)τω=1
maxYω0
Tr(Yω)=1
∑
ω∈Ωe(κ)τω (g(κ, ω)− g(κ))
− 12
(∑
ω∈Ωe(κ)τωφYω
)TQ−1
(∑
ω∈Ωe(κ)τωφYω
). (4.20)
Notice that in its dual form, computing θe(κ) leads to a semidefinite program. Indeed,substituting Zω = τωYω, program (4.20) becomes
θe(κ) = maxZω0∑
ω∈Ωe(κ)Tr(Zω)=1
∑
ω∈Ωe(κ)Tr(Zω) (g(κ, ω)− g(κ))
− 12
(∑
ω∈Ωe(κ)φZω
)TQ−1
(∑
ω∈Ωe(κ)φZω
). (4.21)

4.2. Nonsmooth H∞ design technique 93
The latter program is converted to an LMI problem using a Schur complement argument.As a byproduct we see that θe(κ) ≤ 0 and that θe(κ) = 0 implies κ is critical that is,0 ∈ ∂g(κ).
What is important is that the direction h(Y, τ) = h(Z) in (4.19) is a descent directionof g at κ in the sense that the directional derivative satisfies the decrease condition
g′ (κ;h(Z)) ≤ θe(κ)− 12
(∑
ω∈Ωe(κ)φZω
)Q−1
(∑
ω∈Ωe(κ)φZω
),
where Z is the dual optimal solution. See [9, Lemma 4.3] for a proof. In conclusion, weobtain the following algorithmic scheme:
Nonsmooth descent method for minκ g(κ)Parameters 0 < α < 1, 0 < β < 1, 0 < δ 1.1. Initialization. Find a structured closed-loop stabilizing controller K(κ).2. Active frequencies. Compute g(κ) using the algorithm of [28] in its refined
version [27] and obtain set of active frequencies Ω(κ).3. Add frequencies. Build finite extension Ωe(κ) of Ω(κ) as proposed in [8, 9],
and choose Q δI.4. Step computation. Compute θe(κ) by the dual SDP (4.20) and thereby
obtain direction h(Z) in (4.19). If θe(κ) = 0 stop. Otherwise:5. Line search. Find largest t = βk such that g(κ+ th(Z)) < g(κ)− αtθe(κ)
and such that K(κ+ th(Z)) remains stabilizing.6. Step. Replace κ by κ+ th(Z) and go back to step 2.
Notice that the line search in step 5 is successful because t−1 (g(κ+ th(Z))− g(κ))→g′(κ;h(Z)) as t→ 0+, and because θe(κ) < 0 and 0 < α < 1. Choosing t under the formt = βk with the largest possible k comes down to doing a backtracking line search, whichsafeguards against taking too small steps.
The final elements to be provided is computation of the matrix Q−1. Since Q is sup-posed to carry second order information on the objective function, it may seem appropriateto do a BFGS update
Q+ = Q+ yyT
yT s− QssTQ
sTQs,
where s = κ+ − κ and y = φ+ − φ, where φ is the subgradient of minimal norm in ∂g(κ),g+ the subgradient of minimal norm in ∂g(κ+). Here the notation x+ and x stands forcurrent and past iterates, respectively. Since the inverse Q−1 is required, an alternativeis to use the inverse BFGS update. Here we maintain the matrix P ≈ Q−1 in step 4 ofthe algorithm through
P+ = P + (s− Py)sT + s(s− Py)TsTy
− yT (s− Py)ssT(sTy)2 .
As is well-known, P 0 is guaranteed as long as sTy > 0. If this fails, or if P 6 0 fornumerical reasons, we modify P+ or restart the procedure.

94 Chapitre 4. Optimisation non lisse pour la commande structurée
Note that computing minimal norm elements φ ∈ ∂g(κ) amounts to computing mini-mal norm elements in the LMI set (4.9) and therefore reduces to an LMI problem. Finally,we emphasize the important fact that when singular values σ (G(κ, jω)) are simple onΩe(κ), which is the rule in practice, we have Zω = TrZω so that SDP (4.21) simplifies toa much faster convex QP. A fact that can also be exploited for computing minimal normelements.
cut
active frequencies
extended set
ω ω
σ (Tw→z(K))σ (Tw→z(K))
Figure 4.3: Selection of frequencies: 1)lhs active only, 2)rhs active and secondary peaks.
4.3 Nonsmooth loop-shaping designIn this section we recall some key facts from the loop-shaping design technique introducedby McFarlane and Glover [98], and we discuss how it can be merged with our nonsmoothframework to arrive at a new practical PID loop-shaping design method.
4.3.1 Loop-shaping designLoop-shaping design is an efficient and practical technique which has been applied success-fully to a variety of difficult design problems, see [42, 53, 120] to cite a few. It proceedsas presented in figure 4.4. Firstly, the open-loop plant G is altered by pre- and post-compensators W1 and W2, respectively, to achieve desired open-loop shapes. Roughlyspeaking, the shaped plant W2GW1 should have large gains at low frequencies for per-formance and small gains at high frequencies for noise attenuation. Also, the roll-offrate should not be too large in the mid-frequency range. Secondly, an H∞ synthesis is

4.3. Nonsmooth loop-shaping design 95
performed to minimize the objective
‖T(w1,w2)→(z1,z2)(K)‖∞ , ‖[KI
](I −W2GW1)−1
[G I
]‖∞ (4.22)
which yields a controller K. The final controller is then implemented in the form W1KW2and has no specific structure. Notice that the H∞ norm in (4.22) is greater than one forthe optimal controller K. Put differently, ε , 1/γ is bounded above by unity. The scalarε is therefore an indicator of success of the procedure. Usually values greater than 0.2 or0.3 are deemed acceptable in the sense that the controller K does not significantly alterthe desired loop shape W2GW1 [98]. Moreover, in this situation, the closed-loop systemwill be robust against coprime factor uncertainties [98]. A smaller ε, on the contrary,tells us that the desired loop shape is incompatible with robustness requirements, andthe pre- and post-compensators must be modified to reflect less ambitious performancerequirements. A central element of the design technique is therefore to select appropriatecompensators for the trade-off between performance and robustness. In practice this isgenerally accomplished by trials-and-errors.
z2 z1
w2 w1
W2 W1G
K
Figure 4.4: Loop-shaping H∞ design.
4.3.2 PID Loop-shaping designFor loop-shaping design with a PID controller we have adopted the strategy introducedin [57]. In this approach the controller K is sought in the form K = W−1
1 KPID, assumingthat the pre-compensator W1 is invertible and KPID is a PID controller. The synthesisproblem is then of the form
minimizeKPID stabilizing
‖[W−1
1 KPID
I
](I −W2GKPID)−1
[W2GW1 I
]‖∞ . (4.23)
Note that this scheme retains all the benefits of the H∞ loop-shaping design technique ofsection 4.3.1. As before ε , 1/γ, where γ is the optimal H∞ cost in (4.23), will serve todiagnose whether performance and robustness requirements have been achieved. The final

96 Chapitre 4. Optimisation non lisse pour la commande structurée
controller is obtained as the series connection of the post-compensator W2 and the PIDcontroller in the form KPIDW2. An immediate consequence is that the final controller hasbetter noise attenuation in the high frequency range than a pure PID controller, wheneverW2 is strictly proper. To sum up, we have to solve program (4.23), see also figure 4.5, fora PID controller structure and the nonsmooth technique and tools discussed in sections4.2 will be used to that purpose.
z1
W1
W−11
Kpid
w1
z2
w2
GW2
Figure 4.5: PID loop-shaping H∞ design.
4.4 Application to a separating towerIn this section, we consider the application of the nonsmooth technique to the controldesign for a chemical process from the literature [57]. It consists of a 24-tray tower forseparating methanol and water. The transfer function for controlling the temperature onthe 4th and 17th trays is given as
[t17t4
]=[ −2.2e−s
7s+11.3e−0.3s
7s+1−2.8e−1.8s
9.5s+14.3e−0.35s
9.2s+1
] [u1u2
]. (4.24)
Settling times of about 10 seconds are desired for the closed-loop process in response tostep inputs, as well as good decoupling between the temperatures t17 and t4. A goodrobustness margin is also required to account for process model uncertainties. The latterwill be assessed using the coprime factor uncertainty margin ε as defined in section 4.3.The actual plant in (4.24) is approximated by a rational model using 2nd-order Pade ap-proximation of the delays. This leads to a 12th-order model. Pre- and post-compensatorsare taken from [57]:
W1(s) =[ 5s+2
s+0.001 00 5s+2
s+0.001
], W2(s) =
[ 10s+10 00 10
s+10
].

4.4. Application to a separating tower 97
The standard form of figure 4.5 incorporating the compensators is therefore of 18th-order. For comparison, we have synthesized an unstructured full-order controller, whoseassociated step responses and singular value frequency responses are displayed in figures4.6 and 4.7, respectively. For full order the robustness was found to be ε , 1
γ= 0.361.
This is very satisfactory in terms of stability and gives good agreement with the prescribedopen-loop shapes. This is confirmed by the fast and well-damped step responses in figure4.6. We also observe short term couplings between t17 and t4, an unpleasant behaviorwhich we try to reduce later when dealing with PID controllers. For future use, wekeep in mind that the the optimal γ = 2.77 achieved at this stage is globally optimal ifcontroller structural constraints are disregarded.
In reference [57] a state-space BMI formulation is used to characterize PID solutionsof the H∞ synthesis problem in (4.23). The proposed algorithmic strategy is a coordinatedescent scheme, which alternates between minimizing over Lyapunov variables and overPID controller parameters. Such techniques are often referred to as D-K or V -K itera-tions, see [60] and references therein. Unfortunately, coordinate descent does not comewith any convergence guarantee [66] and breakdown is often observed in practice. In ourcase, reference [57] reported 38 minutes of cputime to obtain the following solution withsuch a technique:
ε = 0.060, Kp =[
2.4719 −1.2098−1.1667 −2.4766
],
Ki =[
0.4657 −0.31−0.2329 −0.487
], Kd =
[0.0534 −0.0072−0.015 −0.0434
].
The corresponding robustness margin is ε = 1/4.02 = 0.249. Time domain and frequencyresponses are shown in figures 4.8 and 4.9, respectively. Using the tools from section 4.2.5,we now show that this PID controller is not a local minimum of program (4.23). Ourlocal optimality certificate θ evaluated at the PID controller above takes a negative valueθ = −0.119, revealing failure of the D-K iteration scheme to reach local optimality. Thisalso indicates that further progress can be achieved by running our nonsmooth methodinitialized at the point of failure. Ultimately the following PID controller is obtained
ε = 0.1527, Kp =[
2.6047 −0.6543−1.1253 −2.3226
],
Ki =[
0.8527 −0.25910.0701 −0.9362
], Kd =
[0.7414 −0.2551−1.5610 −0.0331
].
This represents 38% improvement of the robustness margin over the value ε = 1/2.91 =0.343. Better time responses are also observed, see figure 4.10. The optimal PID controlleralso exhibits higher gains in the low and medium frequency ranges, figure 4.11. On theother hand, it can be seen in figure 4.10 that step responses of t17 and t4 are stronglycoupled, which is undesirable in this application. To reduce the coupling we added asetpoint filter using the model reference approach discussed in section 4.2.4, with thefilter structure in (4.16). The reference model was selected as
Gref (s) ,[ 1
s+1 00 1
s+1
]

98 Chapitre 4. Optimisation non lisse pour la commande structurée
Solving program (4.15) using our nonsmooth technique produced the following setpointfilter:
F (s) =[ 1.045
s+1.045−0.3428ss+2.25−0.3666s
s+0.61473.675s+3.675
].
Step responses with PID controller in tandem with the setpoint filter are presented infigure 4.12.
In a second experiment, we do not use the result in [57] and initialize the algorithmfrom scratch, by first computing a stabilizing PID controller, using an extension of ourmethod to minimize the spectral abscissa [25]. Note that with a different initial seed,there is no reason why we would reach the same local solution. And indeed, a new localminimum is reached:
ε = 0.3780, Kp =[
2.4798 −0.5153−0.8850 −2.1737
],
Ki =[
0.7428 −0.1873−0.0455 −0.7698
], Kd =
[0.2640 −0.2347−2.1424 0.0723
].
The robustness margin is now ε = 1/3.05 = 0.3279, which is only marginally worse thanthe previously synthesized PID controller and again improves the solution given in [57]by 24%. Time- and frequency-domain evaluations are given in figures 4.13 and 4.14. Asbefore, a setpoint filter was computed using the reference model
Gref (s) ,[ 0.25
s2+0.4s+0.25 00 1
s+1
].
The setpoint filter is described as
F (s) =[ 0.7333
s+0.733335.81ss+297.7−0.5452s
s+0.31215.1s+215.1
].
and step responses are given in figure 4.15.As one might expect for a local optimization technique, our experiment underlines that
different local solutions are generally obtained when different initial guesses are used. Suchguesses may be obtained by heuristic techniques developed in PID synthesis. If many localoptima are observed, using semi-global techniques may be indicated. Such methods tryto improve on a given set of local solutions [130].
A strong point of our method is that it practically always finds local optimal solutions,as theoretically expected. Also, the running times are very fast. In fact, in our test wenever exceed a minute cputime. This is in strong contrast with state-space sequential LMIor BMI approaches, which require substantial numerical efforts. In those cases where alocal minimum is not satisfactory, we have to do restarts with different initial seeds, toexplore whether further improvements is possible. How this can be organized in generalwill be investigated in the future.

4.4. Application to a separating tower 99
0 10 20 30−0.2
0
0.2
0.4
0.6
0.8
1
1.2
time (sec.)
out
put #
1
0 10 20 30−0.2
0
0.2
0.4
0.6
0.8
1
1.2
time (sec.)
outp
ut #
2
Figure 4.6: Time-domain simulations ofH∞ controller.
10−5
10−4
10−3
10−2
10−1
100
101
102
103
−80
−60
−40
−20
0
20
40
60
Singular Values
Frequency (rad/sec)
Sin
gula
r V
alue
s (d
B)
Figure 4.7: Frequency response of H∞controller.
0 10 20 30−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
time (sec.)
out
put #
1
0 10 20 30−0.2
0
0.2
0.4
0.6
0.8
1
1.2
time (sec.)
outp
ut #
2
Figure 4.8: Time-domain simulations ofPID controller in [57].
10−2
10−1
100
101
102
103
−30
−20
−10
0
10
20
30
40
Singular Values
Frequency (rad/sec)
Sin
gula
r V
alue
s (d
B)
Figure 4.9: Frequency response of PIDcontroller in [57].
0 10 20 30−0.2
0
0.2
0.4
0.6
0.8
1
1.2
time (sec.)
out
put #
1
0 10 20 30−0.2
0
0.2
0.4
0.6
0.8
1
1.2
time (sec.)
outp
ut #
2
Figure 4.10: Time-domain simulations of1st PID controller.
10−3
10−2
10−1
100
101
102
103
−30
−20
−10
0
10
20
30
40
50
60
70
Singular Values
Frequency (rad/sec)
Sin
gula
r V
alue
s (d
B)
Figure 4.11: Frequency response of 1stPID controller.

100 Chapitre 4. Optimisation non lisse pour la commande structurée
0 10 20 30−0.2
0
0.2
0.4
0.6
0.8
1
1.2
time (sec.)
out
put #
1
0 10 20 30−0.2
0
0.2
0.4
0.6
0.8
1
1.2
time (sec.)
outp
ut #
2Figure 4.12: Time-domain simulations of 1st PID controller with setpoint filter.
0 10 20 30−0.2
0
0.2
0.4
0.6
0.8
1
1.2
time (sec.)
out
put #
1
0 10 20 30−0.2
0
0.2
0.4
0.6
0.8
1
1.2
time (sec.)
outp
ut #
2
Figure 4.13: Time-domain simulations of2nd PID controller.
10−3
10−2
10−1
100
101
102
103
−40
−20
0
20
40
60
80
Singular Values
Frequency (rad/sec)
Sin
gula
r V
alue
s (d
B)
Figure 4.14: Frequency response of 2ndPID controller.
0 10 20 30−0.2
0
0.2
0.4
0.6
0.8
1
1.2
time (sec.)
out
put #
1
0 10 20 30−0.2
0
0.2
0.4
0.6
0.8
1
1.2
time (sec.)
outp
ut #
2
Figure 4.15: Time-domain simulations of 2nd PID controller with setpoint filter.

4.5. Conclusion 101
4.5 ConclusionWe have presented and discussed a nonsmooth optimization technique for the synthesis offinely structured controllers with an H∞ objective. Our approach is general and encom-passes most controller structures of practical interest. The proposed technique is endowedby an easily tractable convergence certificate, which may either serve to validate a givencontroller, or to drive the iterative descent method to termination. A specialization toloop-shaping design with MIMO PID controllers is also introduced. Application to aprocess system indicates that the technique is a practical and effective numerical tool instructured controller design.
AckowledgementsThe authors acknowledge financial support from the Fondation d’entreprise EADS (undercontract Solving challenging problems...) and from the Agence Nationale de Recherche(ANR) (project NT05 Guidage).

102 Chapitre 4. Optimisation non lisse pour la commande structurée

Chapitre 5
Commande temporelle etfréquentielle par techniques non
lisses
Nous illustrons dans l’article qui suit la flexibilité et la richesse de l’approche non lissepour résoudre différents problèmes pratiques de commande, à travers trois exemples desynthèse structurée.
Le premier est une application immédiate de la synthèse H∞ qui permet l’obtentiondirecte d’une loi de commande optimale sous forme observateur (forme dite observer basedou LQG). Un tel correcteur, bien que d’ordre plein, est particulièrement lisible, puisqueses variables d’état sont les états estimés du système commandé.
Le deuxième exemple montre comment structurer la forme standard afin de traiterpar notre approche des problèmes de commande tolérante aux pannes (reliable ou fault-tolerant control en anglais). La loi de commande est alors synthétisée de façon à garantirune performance en boucle fermée pour le système nominal ainsi que pour un ensemble finide systèmes dégradés (cas de pannes de capteurs, par exemple). Le correcteur lui-mêmepeut être structuré ; une action PID a été choisie ici.
Enfin, nous montrons que l’algorithme de descente non lisse appliqué jusqu’ici à uncritère fréquentiel (synthèse H∞) est transposable dans le domaine temporel. Les spécifi-cations temporelles usuelles (dépassement, temps de montée, temps de réponse,. . .) fonten effet intervenir des maxima sur des intervalles de temps, et leur satisfaction s’exprimedonc comme un problème minimax semi-infini, tout comme la synthèse H∞. Seul le calculdes éléments différentiels diffère, et fait ici appel à des simulations temporelles.
La méthode de descente non lisse pour la commande structurée est ici rappelée dansun contexte commun à ces trois applications. Cette unité d’approche n’est pas seulementsatisfaisante d’un point de vue théorique : nous pensons qu’elle facilitera, dans les travauxfuturs, la combinaison de critères et de contraintes de nature fréquentielle ou temporelledans un même problème d’optimisation non lisse.
103

104 Chapitre 5. Commande temporelle et fréquentielle par techniques non lisses

5.1. Introduction 105
Control design in the time- and frequencydomains using nonsmooth techniques
V. Bompart, P. Apkarian and D. Noll
Article à paraître dans Systems & Control Letters (sous presse).
AbstractSignificant progress in control design has been achieved by the use of nonsmooth and semi-infinite mathematical programming techniques. In contrast with LMI or BMI approaches,these new methods avoid the use of Lyapunov variables, which gives them two majorstrategic advances over matrix inequality methods. Due to the much smaller number ofdecision variables, they do not suffer from size restrictions, and they are much easier toadapt to structural constraints on the controller. In this paper, we further develop thisline and address both frequency- and time-domain design specifications by means of anonsmooth algorithm general enough to handle both cases. Numerical experiments arepresented for reliable or fault-tolerant control, and for time response shaping.Keywords: Nonsmooth optimization, H∞ synthesis, structured controllers, PID tuning,time-domain constraints, fault tolerance control, time response shaping.
NotationLet Rn×m be the space of n×m matrices, equipped with the corresponding scalar product〈X, Y 〉 = Tr(XTY ), where XT is the transpose of the matrix X, Tr (X) its trace. Thenotation Hr stands for the set of Hermitian matrices of size r. For complex matrices XH
stands for its conjugate transpose. For Hermitian or symmetric matrices, X Y meansthat X − Y is positive definite, X Y that X − Y is positive semi-definite. We usethe symbol λ1 to denote the maximum eigenvalue of a symmetric or Hermitian matrix.Given an operator T , T ∗ is used to denote its adjoint operator on the appropriate space.The notation vec applied to a matrix stands for the usual column-wise vectorization of amatrix. We use concepts from nonsmooth analysis covered by [44]. For a locally Lipschitzfunction f : Rn → R, ∂f(x) denotes its Clarke subdifferential at x while the notationf ′(x;h) stand for its directional derivative at x in the direction h.
5.1 IntroductionInteresting new methods in nonsmooth optimization for the synthesis of controllers haverecently been proposed. See [33, 27] for stabilization problems, [8, 9, 94, 7, 32] for H∞

106 Chapitre 5. Commande temporelle et fréquentielle par techniques non lisses
synthesis, and [7, 11] for design with IQCs. These techniques are in our opinion a valuableaddition to the designer’s toolkit:
• They avoid expensive state-space characterizations, which suffer the curse of di-mension, because the number of Lyapunov variables grows quadratically with thesystem size.
• The preponderant computational load of these new methods is transferred to thefrequency domain and consist mainly in the computation of spectra and eigenspaces,and of frequency domain quantities, for which efficient algorithms exist. This keyfeature is the result of the idea of the diligent use of nonsmooth criteria of the formf(K) = maxω∈[0,∞] λ1 (F (K,ω)), which are composite functions of a smooth butnonlinear operator F , and a nonsmooth but convex function λ1.
• The new approach is highly flexible, as it allows to address, with almost no additionalcost, structured synthesis problems of the form f(κ) = maxω∈[0,∞] λ1 (F (K(κ), ω)),where K(·) defines a mapping from the space of controller parameters κ to the spaceof state-space representations K. From a practical viewpoint, structured controllersare better apprehended by designers and facilitate implementation and re-tuningwhenever performance or stability specifications change. This may be the majoradvantage of the new approach over matrix inequality methods.
• The new approach is general and encompasses a wide range of problems beyondpure stabilization and H∞ synthesis. A number of important problems in controltheory can be regarded as structured control problems. Striking examples are si-multaneous stabilization, reliable and decentralized control, multi frequency banddesign, multidisk synthesis, and much else.
• Finally, the new methods are supported by mathematical convergence theory, whichcertifies global convergence under practically useful hypotheses in the sense thatiterates converge to critical points from arbitrary starting points.
In this paper, we expand on the nonsmooth technique previously introduced in [8], andexplore its applicability to structured controller design in the presence of frequency- andtime-domain specifications. We show that the same nonsmooth minimization techniquecan be used to handle these seemingly different specifications. We address implementationdetails of the proposed technique and highlight differences between frequency and timedomain. Finally, we present numerical results in observer-based control design and reliablecontrol, as well as for time-response shaping.
We refer the reader to the articles cited above for references on controller synthesisusing nonsmooth optimization. General concepts in nonsmooth analysis can be found in[44], and optimization of max functions is covered by [114]. Time response shaping isaddressed at length in [59, 71, 73]. These techniques are often referred to as the IterativeFeedback Tuning (IFT) approach, mainly developed by M. Gevers, H. Hjalmarsson andco-workers.

5.2. Time- and frequency domain designs 107
5.2 Time- and frequency domain designs
P
K
yu
w z
Tw→z(K) :=
Figure 5.1: Standard interconnection.
Consider a plant P in state-space form
P (s) :
xzy
=
A B1 B2C1 D11 D12C2 D21 D22
xwu
, (5.1)
where x ∈ Rn is the state vector of P , u ∈ Rm2 the vector of control inputs, w ∈ Rm1
the vector of exogenous inputs or a test signal, y ∈ Rp2 the vector of measurements andz ∈ Rp1 the controlled or performance vector. Without loss, it is assumed throughoutthat D22 = 0.
The focus is on time- or frequency domain synthesis with structured controllers, whichconsists in designing a dynamic output feedback controller K(s) with feedback law u =K(s)y for the plant in (5.1), having the following properties:
• Controller structure: K(s) has a prescribed structure.
• Internal stability: K(s) stabilizes the original plant P (s) in closed-loop.
• Performance: Among all stabilizing controllers with that structure, K(s) is suchthat either the closed-loop time response z(t) to a test signal w(t) satisfies prescribedconstraints, or the H∞ norm of transfer function ‖Tw→z(K)‖∞ is minimized. HereTw→z(K) denotes the closed-loop transfer function from w to z, see figure 5.1.
For the time being we leave apart structural constraints and assume that K(s) hasthe frequency domain representation:
K(s) = CK(sI − AK)−1BK +DK , AK ∈ Rk×k, (5.2)
where k is the order of the controller, and where the case k = 0 of a static controllerK(s) = DK is included. A further simplification is obtained if we assume that preliminarydynamic augmentation of the plant P (s) has been performed:
A→[A 00 0k
], B1 →
[B10
], etc.

108 Chapitre 5. Commande temporelle et fréquentielle par techniques non lisses
so that manipulations will involve a static matrix
K ,[AK BK
CK DK
]∈ R(k+m2)×(k+p2) . (5.3)
With this proviso, the following closed-loop notations will be useful:[A(K) B(K)C(K) D(K)
],[A B1C1 D11
]+[B2D12
]K[C2 D21
]. (5.4)
Structural constraints on the controller will be defined by a matrix-valued mappingK(.) from Rq to R(k+m2)×(k+p2), that is K = K(κ), where vector κ ∈ Rq denotes theindependent variables in the controller parameter space Rq. For the time being we willconsider free variation κ ∈ Rq, but the reader will be easily convinced that adding param-eter restriction by means of mathematical programming constraints gI(κ) ≤ 0, gE(κ) = 0could be added if need be. We will assume throughout that the mapping K(.) is continu-ously differentiable, but otherwise arbitrary. As a typical example, consider MIMO PIDcontrollers, given as
K(s) = Kp + Ki
s+ Kds
1 + εs, (5.5)
where Kp, Ki and Kd are the proportional, the integral and the derivative gains, respec-tively, are alternatively represented in the form
K(s) = DK + Ri
s+ Rd
s+ τ, (5.6)
with the relations
DK , Kp + Kd
ε, Ri , Ki, Rd , −Kd
ε2, τ , 1
ε, (5.7)
and a linearly parameterized state-space representation is readily derived as
K(κ) =[AK BK
CK DK
]=
0 0 Ri
0 −τI Rd
I I DK
, AK ∈ R2m2×2m2 . (5.8)
Free parameters in this representation can be gathered in the vector κ obtained as
κ ,
τvecRi
vecRd
vecDK
∈ R
3m22+1 .
We stress that the above construction is general and encompasses most controller struc-tures of practical interest. We shall see later that interesting control problems such asreliable control are also special cases of the general structured design problem.
With the introduced notation, time-domain design is the optimization program
minimizeκ∈Rq
f∞(κ) , max
t∈[0,T ]f(κ, t)

5.3. Nonsmooth descent method 109
where the case T =∞ is allowed. See section 5.3.1.0 for further details and other practicaloptions.
Frequency-domain design is the standard H∞ problem
minimizeκ∈Rq
f∞(κ) , sup
ω∈[0,∞]σ(Tw→z(K(κ), jω)) = ||Tw→z(K(κ))||∞
.
5.3 Nonsmooth descent methodIn this section we briefly present our nonsmooth optimization technique for time- andfrequency-domain max functions. For a detailed discussion of the H∞ norm, we refer thereader to [8, 9]. The setting under investigation is
minimizeκ
maxx∈X
f(κ, x) , (5.9)
where the semi-infinite variable x = t or x = ω is restricted to a one-dimensional set X.Here X may be the halfline [0,∞], or a limited band [ω1, ω2], or a union of such bands inthe frequency domain, and similarly in the time domain. The symbol κ denotes the designvariable involved in the controller parametrization K(·), and we introduce the objectiveor cost function
f∞(κ) , maxx∈X
f(κ, x) .
At a given parameter κ, we assume that we can compute the set Ω(κ) of active timesor frequencies, which we assume finite for the time being:
Ω(κ) , x ∈ X : f(κ, x) = f∞(κ) . (5.10)
For future use we construct a finite extension Ωe(κ) of Ω(κ) by adding times or frequenciesto the finite active set Ω(κ). An efficient strategy to construct this set for x = ω has beendiscussed in [8, 9]. For x = t some ideas will be given in section 5.4.3.
For the ease of presentation we assume that the cost function f is differentiable withrespect to κ for fixed x ∈ Ωe(κ), so that gradients φx = ∇κf(κ, x) are available. Extensionsto the general case are easily obtained by passing to subgradients, since f(., x) has a Clarkegradient with respect to κ for every x ∈ X [44]. Following the line in Polak [114], see also[8], we introduce the optimality function
θe(κ) , minh∈Rq
maxx∈Ωe(κ)
−f∞(κ) + f(κ, x) + hTφx + 12h
TQh, (5.11)
Notice that θe is a first-order model of the objective function f∞(κ) in (5.9) in a neigh-borhood of the current iterate κ. The model offers the possibility to include second-orderinformation [5] via the term hTQh, but Q 0 has to be assured. For simplicity, we willassume Q = δ I with δ > 0 in our tests.
Notice that independently of the choices of Q 0 and the finite extension Ωe(κ) ofΩ(κ) used, the optimality function has the following property: θe(κ) ≤ 0, and θe(κ) = 0 ifand only if 0 ∈ ∂f∞(κ), that is, κ is a critical point of f∞. In order to use θe to computedescent steps, it is convenient to obtain a dual representation of θe. To this aim, we first

110 Chapitre 5. Commande temporelle et fréquentielle par techniques non lisses
replace the inner maximum over Ωe(κ) in (5.11) by a maximum over its convex hull andwe use Fenchel duality to swap the max and min operators. This leads to
θe(κ) , maxτx≥0∑
x∈Ωe(κ)τx=1
minh∈Rq
∑
x∈Ωe(κ)τx(f(κ, x)− f∞(κ) + hTφx) + 1
2hTQh .
These operations do not alter the value of θe. The now inner infimum over h ∈ Rq is nowunconstrained and can be computed explicitly. Namely, for fixed τx in the outer program,we obtain the solution of the form
h(τ) = −Q−1
∑
x∈Ωe(κ)τxφx
. (5.12)
Substituting this back in the primal program (5.11) we obtain the dual expression
θe(κ) = maxτx≥0∑
x∈Ωe(κ)τx=1
∑
x∈Ωe(κ)τx (f(κ, x)− f∞(κ))
− 12
(∑
x∈Ωe(κ)τxφx
)TQ−1
(∑
x∈Ωe(κ)τxφx
). (5.13)
Notice that in its dual form, computing θe(κ) is a convex quadratic program (QP). Asa byproduct we see that θe(κ) ≤ 0 and that θe(κ) = 0 implies κ is critical that is,0 ∈ ∂f∞(κ).
What is important is that as long as θe(κ) < 0, the direction h(τ) in (5.12) is adescent direction of f∞ at κ in the sense that the directional derivative satisfies thedecrease condition
f ′∞ (κ;h(τ)) ≤ θe(κ)− 12
(∑
x∈Ωe(κ)τxφx
)TQ−1
(∑
x∈Ωe(κ)τxφx
)≤ θe(κ) < 0,
where τ is the dual optimal solution of program (5.13). See [9, Lemma 4.3] for a proof.In conclusion, we obtain the following algorithmic scheme:
Nonsmooth descent method for minκ f∞(κ)Parameters 0 < α < 1, 0 < β < 1.1. Initialize. Find a structured closed-loop stabilizing controller K(κ).2. Active times or frequencies. Compute f∞(κ) and obtain the set of active
times or frequencies Ω(κ).3. Add times or frequencies. Build finite extension Ωe(κ) of Ω(κ).4. Compute step. Calculate θe(κ) by the dual QP (5.13) and thereby
obtain direction h(τ) in (5.12). If θe(κ) = 0 stop. Otherwise:5. Line search. Find largest b = βk such that f∞(κ+ bh(τ)) < f∞(κ)− αbθe(κ)
and such that K(κ+ b h(τ)) remains closed-loop stabilizing.6. Step. Replace κ by κ+ b h(τ) and go back to step 2.
Finally, we mention that the above algorithm is guaranteed to converge to a criticalpoint [8, 9], a local minimum in practice.

5.3. Nonsmooth descent method 111
5.3.1 Nonsmooth propertiesIn order to make our conceptual algorithm more concrete, we need to clarify how subdif-ferential information can be obtained for both time- and frequency-domain design.
Frequency-domain design
In the frequency domain we have x = ω. The function f∞(κ) becomes f∞(κ) = ||.||∞ Tw→z(.) K(κ), which maps Rq into R+, and is Clarke subdifferentiable as a compositefunction [104, 8, 7]. Its Clarke gradient is obtained as K′(κ)∗∂g∞(K), where K′(κ) isthe derivative of K(.) at κ, K′(κ)∗ its adjoint, and where g∞ is defined as g∞ , ||.||∞ Tw→z(.) and maps the set D ⊂ R(m2+k)×(p2+k) of closed-loop stabilizing controllers intoR+. Introducing the notation[Tw→z(K, s) G12(K, s)G21(K, s) ?
],
[C(K)C2
](sI −A(K))−1
[B(K) B2
]+[D(K) D12D21 ?
].
(5.14)the Clarke subdifferential of g∞ at K is the compact and convex set of subgradients∂g∞(K) , ΦY : Y ∈ S(K) where
ΦY = g∞(K)−1 ∑
ω∈Ω(K)Re
G21(K, jω)Tw→z(K, jω)HQωYω(Qω)HG12(K, jω)
T, (5.15)
and where S(K) is the spectraplex
S(K) = Y = (Yω)ω∈Ω(K) : Yω = (Yω)H 0,∑
ω∈Ω(K)Tr (Yω) = 1, Yω ∈ Hrω.
In the above expressions, Qω is a matrix whose columns span the eigenspace of
Tw→z(K, jω)Tw→z(K, jω)H
associated with its largest eigenvalue
λ1(Tw→z(K, jω)Tw→z(K, jω)H
)
of multiplicity rω. We also deduce from expression (5.15) the form of the subgradients of
f(κ, ω) , σ(Tw→z(K(κ), jω))
at κ with fixed ω, which are used in the primal and dual programs (5.11) and (5.13),respectively
φx = ΦYω = K′(κ)∗f(κ, ω)−1ReG21(K, jω)Tw→z(K, jω)HQωYω(Qω)HG12(K, jω)
T
where Qω is as before and Yω ∈ Hrω , Yω 0, Tr (Yω) = 1. Finally, we note that allsubgradient formulas are made implementable by expliciting the action of the adjointoperator K′(κ)∗ on elements F ∈ R(m2+k)×(p2+k). Namely, we have
K′(κ)∗F =[Tr (∂K(κ)
∂κ1
TF ), . . . ,Tr (∂K(κ)
∂κq
TF )]T
.

112 Chapitre 5. Commande temporelle et fréquentielle par techniques non lisses
In the general case, where some of the maximum eigenvalues at some of the frequenciesin the extended set Ωe(κ) has multiplicity > 1, the formulas above should be used, andthe dual program in (5.13) becomes a linear SDP [8, 9]. This is more expensive than aQP, but the size of the SDP remains small, so that the method is functional even for largesystems. When maximum eigenvalues are simple, which seems to be the rule in practice,matrices Yω are scalars, and the primal and dual subproblems become much faster convexQPs. This feature, taken together with the fact that Lyapunov variables are never used,explains the efficiency of the proposed technique.
Time-domain design
We now specialize the objective function f∞ to time-domain specifications. For simplicityof the exposition, we assume the performance channel w → z is SISO, that ism1 = p1 = 1,while the controller channel y → u remains unrestricted.
As noted in [29], most specifications are in fact envelope constraints:
zmin(t) ≤ z(κ, t) ≤ zmax(t) for all t ≥ 0 (5.16)
where z(κ, .) is the closed-loop time response to the input signal w (typically a unit stepcommand), when controller K = K(κ) is used, and where −∞ ≤ zmin(t) ≤ zmax(t) ≤ +∞for all t ≥ 0. This formulation offers sufficient flexibility to cover basic step responsespecifications such as rise and settling times, overshoot and undershoot, or steady-statetracking. Several constraints of this type can be combined using piecewise constant en-velope functions zmin and zmax. A model following specification is easily incorporated bysetting zmin = zmax = zref , where zref is the desired closed-loop response.
For a stabilizing controller K = K(κ), the maximum constraint violation
f∞(κ) = maxt≥0
max [z(κ, t)− zmax(t)]+, [zmin(t)− z(κ, t)]+ (5.17)
is well defined, f∞(κ) ≥ 0, and f∞(κ) = 0 if and only if z(κ, .) satisfies the constraint(5.16). Minimizing f∞ is therefore equivalent to reducing constraint violation, and will asa rule lead to a controller K(κ) achieving the stated time-domain specifications. In thecase of failure, this approach converges at least to a local minimum of constraint violation.
The objective function f∞ is a composite function with a double max operator. Theouter max on t ≥ 0 makes the program in (5.17) semi-infinite, while the inner max, for allt ≥ 0, is taken over f1(κ, t) = z(κ, t)−zmax(t), f2(κ, t) = zmin(t)−z(κ, t) and f3(κ, t) = 0.
Assuming that the time response κ 7→ z(., t) is continuously differentiable, f∞ is Clarkeregular and its subdifferential is
∂f∞(κ) = cot∈Ω(κ)
co
i∈I(κ,t)∇κfi(κ, t)
, (5.18)
where Ω(κ) is the set of active times defined by (5.10), and
I(κ, t) = i ∈ 1, 2, 3 : f(κ, t) = fi(κ, t) .

5.3. Nonsmooth descent method 113
More precisely, for all t ∈ Ω(κ),
coi∈I(κ,t)
∇κfi(κ, t) =
∇κz(κ, t) if z(κ, t) > zmax(t)−∇κz(κ, t) if z(κ, t) > zmin(t)0 if zmin(t) < z(κ, t) < zmax(t)[∇κz(κ, t), 0] if z(κ, t) = zmax(t) > zmin(t)[−∇κz(κ, t), 0] if z(κ, t) = zmin(t) < zmax(t)[−∇κz(κ, t),∇κz(κ, t)] if z(κ, t) = zmin(t) = zmax(t)
(5.19)
Clearly, as soon as the envelope constraint is satisfied for one active time t ∈ Ω(κ), eitherone of the last four alternatives in (5.19) is met, we have f∞(κ) = 0 for all t ≥ 0 so that0 ∈ ∂f∞(κ) and κ is a global minimum of program (5.9). The computation of the descentstep only makes sense in the first two cases, i.e., when f∞(κ) > 0. Notice then that theactive times set Ω(κ) can be partitioned into
Ω1(κ) , t : t ∈ Ω(κ), f1(κ, t) = f∞(κ)Ω2(κ) , t : t ∈ Ω(κ), f2(κ, t) = f∞(κ) (5.20)
and the Clarke subdifferential ∂g∞(K) is completely described by the subgradients
ΦY (K) =∑
t∈Ω1(K)Yt∇Kz(K, t)−
∑
t∈Ω2(K)Yt∇Kz(K, t) (5.21)
where Yt ≥ 0 for all t ∈ Ω(K), and ∑t∈Ω(K) Yt = 1.Remark. The hypothesis of a finite set Ω(κ) may be unrealistic in the time domain
case, because the step response trajectory z(·, t) is not necessarily analytic or piecewiseanalytic, and may therefore attain the maximum value on one or several contact intervals[t−, t+], where t− is the entry time, t+ the exit time, and where it is reasonable to assumethat there are only finitely many such contact intervals. In that case, our method iseasily adapted, and (5.11) remains correct in so far as the full contact interval can berepresented by three pieces of information: the gradients φx of the trajectory at x = t−,x = t+, and one additional element φx = 0 for say x = (t− + t+)/2 on the interior of thecontact interval. (This is a difference with the frequency domain case, where the functionsω 7→ f(κ, ω) are analytic, so that the phenomenon of a contact interval could not occur).
A more systematic approach to problems of this form with infinite active sets wouldconsist in allowing choices of finite sets Ωe(κ), where Ω(κ) 6⊂ Ωe(κ) is allowed. This leadsto a variation of the present algorithm discussed in [11, 119, 12], where a trust regionstrategy replaces the present line search method.
Gradient computation By differentiating the state-space equations (5.1) with respectto Kij, we get
ddt
∂x∂Kij (K, t) = A ∂x
∂Kij (K, t) + B2∂u∂Kij (K, t)
∂z∂Kij (K, t) = C1
∂x∂Kij (K, t) +D12
∂u∂Kij (K, t)
∂y∂Kij (K, t) = C2
∂x∂Kij (K, t)
(5.22)

114 Chapitre 5. Commande temporelle et fréquentielle par techniques non lisses
controlled by∂u∂Kij (K, t) = ∂K
∂Kij (K, t)y(K, t) +K ∂y∂Kij (K, t)
= yj(K, t)ei +K ∂y∂Kij (K, t)
(5.23)
where ei stands for the i-th vector of the canonical basis of Rm2 . It follows that the partialderivative of the output signal ∂z
∂Kij (K, t) is the simulated output of the interconnectionin figure 5.2, where the exogenous input w is held at 0, and the vector yj(K, t)ei is addedto the controller output signal. We readily infer that nu × ny simulations are required inorder to form the sought gradients.
K
yjei
0
+
+
∂y∂Kij
∂u∂Kij
∂z∂Kij
P
Figure 5.2: Interconnection for gradient computation.
This way of computing output signal gradients by performing closed-loop simulationsis at the root of the Iterative Feedback Tuning (IFT) method, intially proposed in [73] forSISO systems and controllers. This optimization technique has originated an extensivebibliography (see [72, 71, 59] and references therein) and was extended to multivariablecontrollers [70]. Most of these papers illustrate the IFT with a smooth quadratic objectivefunction, minimized with the Gauss-Newton algorithm. In [78], the nonsmooth absoluteerror is used, but a differentiable optimization algorithm (DFP) is applied. Our approachhere differs both in the choice of the nonsmooth optimization criterion f∞, and in thedesign of a tailored nonsmooth algorithm as outlined in section 5.3.
Practical aspects The active time sets Ω1(K) and Ω2(K) are computed via numericalsimulation of the closed-loop system in response to the input signal w, see figure 5.1.This first simulation determines the time samples (tl)0≤l≤N that will be used throughoutthe optimization phase. Measured output values
(y(tl)
)must be stored for subsequent
gradient computation. The extension Ωe(K) is built from Ω(K) by adding time sampleswith largest envelope constraint violation (5.16), up to nΩ elements in all are retained.According to our experiments the set extension generally provides a better model ofthe original problem as captured by the optimality function θe (5.11) and thus descentdirections (5.12) with better quality are obtained. The gradients ∇Kz(K, tl) (for t ∈Ωe(K)) result from nu × ny additional simulations of the closed-loop (figure 5.2) at thesame time samples (tl)0≤l≤N .

5.4. Applications 115
5.4 ApplicationsIn this section, we illustrate our nonsmooth technique on a variety of examples includingstructured H∞ control, reliable control and time response shaping. We insist on the highflexibility of the proposed nonsmooth techniques and its excellent success in solving hardpractical problems.
5.4.1 Application to observer-based controller designObserver-based controllers suit many realistic control problems, whenever the system statevariables are not directly available for feedback synthesis. Unlike unstructured dynamiccontrollers, they have a straightforward physical interpretation, since controller states aresimply estimates of the plant states. In addition, observer-based controllers are easier toimplement and to re-tune.
Let x be an asymptotic estimate of the state vector x of the plant P (5.1). We assumethat (C2, A) is detectable, and that (A,B2) is stabilizable. As is well known, the estimatex is obtained through the full-order Luenberger observer:
˙x = Ax+B2u+Kf (y − C2x), (5.24)
where Kf ∈ Rn×p2 is the state estimator gain. The controlled input is u = −Kcx, whereKc ∈ Rm2×n is the state feedback gain. With the notations in (5.3), we get
K(κ) =[AK BK
CK DK
]=[A−B2Kc −KfC2 Kf
−Kc 0
](5.25)
where the controller parameters are described as
κ ,[
vecKf
vecKc
]∈ Rn(p2+m2) .
This state-space realization of the standard full-order observer-based controller is linearin κ. It follows that the Jacobian matrix K′(κ) only depends on the plant data A, B2 andC2.
Nonsmooth H∞ synthesis with observer-based controllers has been tested on the fol-lowing problem discussed in [1], taken from the Matlab library of mu-synthesis examplesfor Simulink. The state-space equations of the controlled plant are:
G(s) :[xGyG
]=
−36.6 −18.923 −0.414−1.9 0.983 −77.8
0 57.3 0
[xGuG
](5.26)
The exogenous inputs are the disturbances w1 (on the actuator signal) and w2 (on themeasurement). Two frequency domain weights Wu(s) and Wy(s) are applied to u =uG − w1 respectively to y = y + w1, defining the regulated outputs z1 and z2. They are
Wu(s) = 50s+ 5000s+ 10000 , and Wy(s) = 0.5s+ 1.5
s+ 10000 . (5.27)

116 Chapitre 5. Commande temporelle et fréquentielle par techniques non lisses
The resulting augmented model (figure 5.3) has order 4, with state vector x = [xG, xu, xy]T ,and the realization used in our computations is the following:
P (s) :
xzy
=
−36.6 −18.923 0 0 −0.414 0 −0.414−1.9 0.983 0 0 −77.8 0 −77.8
0 0 −10000 0 0 0 5120 3667.2 0 −10000 0 64 00 0 −966.8 0 0 0 500 28.65 0 −78.102 0 0.5 00 57.3 0 0 0 1 0
xwu
(5.28)Notice that the static gains Kf and Kc depend on the state-space realization chosen forP , since the controller state variable x estimates x.
z1
z2
y+ +
w1
++
Wu
Wy
G
u
K(κ)
w2
Figure 5.3: Observer-based feedback with augmented model.
Running our nonsmooth algorithm to minimize ‖Tw→z(K(κ))‖∞, yields the gains
Kf = [3886, 7203, 163.3, 29.22]TKc = [−484, 219.2, 1876, −152.9] . (5.29)
Correspondingly, the achieved H∞ norm is 0.5168, which is about the same as the H∞performance of the standard full-order H∞ controller γ = 0.5109.
5.4.2 Application to reliable controlReliable or fault-tolerant control has to guarantee satisfactory stability and performancein nominal conditions as well as in scenarios, where some system components turn faultyor deviate from nominal conditions. The active approach uses a fault detection schemeor identification procedure to adjust the controller in real-time to ensure safe opera-tion. Here the focus is on the passive approach, where a single controller is requiredto handle most plausible default scenarios. See [129] and the survey [111] for a com-prehensive view. We reformulate this problem as a doubly structured design problem

5.4. Applications 117
and use our nonsmooth method to derive a local solution. In figure (5.4) we show onthe left side various synthesis scenarios, where a single (unstructured or already struc-tured) controller K(κ) must simultaneously minimize the closed-loop performance chan-nels ||Twi→zi(K(κ))||∞ for i = 1, . . . , N . This is readily formulated as a single structuredH∞ synthesis problem, where the sought controller K(κ) has a repeated block-diagonalstructure K(κ) = RK(κ). See the right-hand side of figure 5.4. A state-space represen-tation of the plant P (s) is readily derived as
A B1 B2C1 D11 D11C2 D21 D22
=
diagi=1,...,N
Ai diagi=1,...,N
Bi1 diag
i=1,...,NBi
2
diagi=1,...,N
Ci1 diag
i=1,...,NDi
11 diagi=1,...,N
Di12
diagi=1,...,N
Ci2 diag
i=1,...,NDi
21 diagi=1,...,N
Di22
.
where the superscript i refers to the ith scenario and where appropriate dynamic augmen-tations have been performed beforehand for dynamic controllers. Note that the controlleris now doubly-structured in the sense that the already structured data K(κ) are repeatedin the block-diagonal structure IN ⊗K(κ), which we describe by the diagonal block rep-etition operator R above (see figure 5.4). This fits nicely into the general frameworkpresented in sections 5.2 and 5.3, because the chain rule can obviously be used to copewith a diagonal augmentation R K of controller parameterizations.

118 Chapitre 5. Commande temporelle et fréquentielle par techniques non lisses
P
wN zN
yN
PN
w1 z1
y1
P1
w z
y
uN
u1
u⇔
. . .
...
K(κ)
TwN→zN (K(κ))
Tw1→z1(K(κ))
K(κ)
K(κ)
Tw→z(K(κ))K(κ)
Figure 5.4: Reliable control based on N scenarios.
We illustrate the synthesis technique by means of the following example from [142].It consists of 10 plants G0 to G9 with G0(s) = 1
s−1 , the nominal model and
G1(s) = 6.1s2+5.1s−6.1 , G2(s) = 1.425
s−1.425 G3(s) = 0.67s−0.67 ,
G4(s) = −(s−14.29)(s+14.29)(s−1) , G5(s) = 4900
(s−1)(s2+21s+4900) , G6(s) = 4900(s+777.7)(s+6.301)(s−1) ,
G7(s) = 15625106
(s+50)6(s−1) , G8(s) = −2.9621(s−9.837)(s+0.7689)(s+32)(s−1)(s+0.5612) , G9(s) = 4.991(s2+3.672s+34.85)
(s+32)(s+7.241)(s−1) ,
as faulty modes. The design objective is to minimize
maxi=0,...,9
||W (s)Twi→zi(K)||∞,where Twi→zi , (I +Gi(s)K(s))−1 (5.30)
andW (s) = 0.25s+0.6s+0.006 is a weighting function penalizing the low frequency range to achieve
good tracking properties in response to a step command. Different controller structuresK(κ) will be considered in the sequel. The author in [142] investigated various optionsincluding a controller with good nominal performance K1(s) = 10(0.9s+1)
s, a robust con-
troller K2(s) = 2.8s+1s
, and a generalized internal model control (GIMC) implementationbased on both K1(s) and K2(s), which we shall denote Kgimc(s). The latter is a 6thorder controller with Youla parameter
Q , −0.68889s(s+ 1.452)(s+ 1)(s+ 1.111)(s2 + 1.8s+ 1) .

5.4. Applications 119
Step responses of these controllers for nominal and faulty modes of the plant aredisplayed in figures 5.6 to 5.8. Clearly, K1 has good nominal performance, but is notsatisfactory on faulty modes. On the other hand, controller K2 shows very robust per-formance, but responses are slower and the controller performs poorly in the nominalcase. The GIMC implementation dramatically improves the situation, since good nomi-nal performance is maintained and the controller also gives good performance on faultymodes.
We have used the proposed nonsmooth technique to minimize the worst case objectivein (5.30) over the set of PID feedback controllers with parametrization given in (5.6). Thefollowing parameter values were obtained:
τ = 0.0100, Ri = 1.1589, Rd = 0.4883, DK = 4.0263 .
The achieved max H∞ norm is 0.4886, and step responses with this controller are shownin figure 5.9. This controller shows clearly better performance than K1(s) or K2(s), butperforms slightly worse than Kgimc(s). Note that the GIMC controller can also be viewedas a two-degree of freedom controller [141], which suggests using a two-degree of freedomarchitecture to improve the PID feedback controller. We have used the model followingsynthesis interconnection shown in figure 5.5, where Gref is a reference model to computea second-order feedforward controller F (s) with fixed feedback controller K(s) = KPID.As before, the feedforward controller is required to minimize the worst-case tracking errorfrom r to e over simultaneously the nominal model and the faulty modes
minimizeF (s)
maxi=0,...,9
||T ir→e(F (s))||∞ .
With a slow reference model
Gref = 11.11s2 + 6s+ 11.11 ,
the following feedforward controller was obtained
F (s) = −3.0642(s+ 1.976)(s+ 1.273)(s+ 3.796)(s+ 1.049) .
With a faster reference model
Gref = 28.7s2 + 7.5s+ 28.7 ,
we have obtainedF (s) = −1.1684(s2 + 1.46s+ 18.51)
s2 + 5.015s+ 18.39 .
Note that the overall controller has order 4 since it consists in a PID controller in thefeedback path and a second-order controller for feedforward action. Steps responses aregiven in figures 5.10 and 5.11, respectively, for slow and fast feedforward controllers. Notethat the latter controller appears to be the best obtained so far in terms of settling timeand overshoot.

120 Chapitre 5. Commande temporelle et fréquentielle par techniques non lisses
+
Gref(s)
e−K(s)− G(s)
++
+
F (s)
r
Figure 5.5: Feedforward design with reference model.
0 1 2 3 4 5 6 7 8 9 10−1
−0.5
0
0.5
1
1.5
2
2.5
3
time (sec.)
out
put
Figure 5.6: Step response with perfor-mance controller.
0 1 2 3 4 5 6 7 8 9 10−0.5
0
0.5
1
1.5
2
time (sec.)
out
put
Figure 5.7: Step response with robustcontroller.

5.4. Applications 121
0 1 2 3 4 5 6 7 8 9 10−0.5
0
0.5
1
1.5
2
time (sec.)
out
put
Figure 5.8: Step response with general-ized internal model controller.
0 1 2 3 4 5 6 7 8 9 10−0.5
0
0.5
1
1.5
2
time (sec.)
out
put
Figure 5.9: Step response with nons-mooth PID controller.
0 1 2 3 4 5 6 7 8 9 10−0.5
0
0.5
1
1.5
2
time (sec.)
out
put
Figure 5.10: Step response with PID+ feedforward control, slow referencemodel.
0 1 2 3 4 5 6 7 8 9 10−0.5
0
0.5
1
1.5
2
time (sec.)
out
put
Figure 5.11: Step response with PID +feedforward control, fast reference model.
5.4.3 Application to PID time response shapingIn order to illustrate the ability of the proposed nonsmooth technique to handle time-domain constraints and controller structure, the following test examples from [88] havebeen used
G1(s) = 120s+1e
−5s, G2(s) = 120s+1e
−20s
G3(s) = 1(10s+1)8 , G4(s) = −5s+1
(10s+1)(20s+1) .(5.31)
The time delays are replaced by a third-order Padé approximation, which generates non-minimum phase zeros in the transfer functions G1 and G2. Each of these plants is regu-lated by a two-degree-of-freedom (2-DOF) PID controller, as shown in figure 5.12, withKr(s) = Kp + Ki
sand Ky(s) = Kp + Ki
s+ Kds
1+εs .

122 Chapitre 5. Commande temporelle et fréquentielle par techniques non lisses
Kr(s) G(s)
Ky(s)
−u y+r
Figure 5.12: 2-DOF with PID.
K(κ) r
yP
G
w = r z = y
y
u
Figure 5.13: Equivalent standard form to2-DOF with PID.
This 2-DOF controller structure is equivalent to the following state-space representa-tion, in the framework shown in figure 5.13, with the notations from (5.7):
K(κ) =
0 0 0 Ri 00 −τ 0 Rd 00 0 0 0 Ri
−1 −1 1 −DK DK + Rdτ
, (5.32)
where the search space is κ = [τ, Ri, Rd, DK ]T ∈ R4.For each of the four systems (5.31), the envelope functions were chosen piecewise
constant, in order to constrain the overshoot zos and the settling time at ±2% of thesteady state. Using the indicatrix function 1[a,b[ to restrict to intervals, we define
zmax = (1 + zos)1[0,ts[ + 1.021[ts,+∞[
zmin =−∞ on [0, ts[0.98 on [ts,+∞[
(5.33)
The vector κ was initialized with the PID parameters obtained with the Ziegler-Nichols(ZN) tuning rules in [88], a heuristic which gives unsatisfactory step responses for theplants (5.31), with high overshoot and slow settling times. The results are summarized intable 5.1, where “NS” indicates the controller parameters obtained from the nonsmoothoptimization. They are compared to those from [88], denoted by “IFT”. The correspondingstep responses are drawn in figures 5.14 to 5.17.
Obviously, arbitrary low zos or ts are not necessarily achievable with the structuredcontroller K(κ). If the chosen time envelope is too restrictive, the algorithm will convergeto a minimizer κ of f∞ (i.e. θe(κ) ≈ 0) with f∞ > 0.
Conversely, as the algorithm returns a local minimizer κ, f∞(κ) > 0 does not necessarymean that the time constraints could not be satisfied. A restart with another initialcontroller κ may very well lead to f∞ = 0. This difficulty appeared for plant G2 (resp.G3): with the ZN controller as starting point, we reached f∞ = 3.4033 · 10−2 (resp.f∞ = 1.3907 · 10−2) at convergence, which was an unsatisfactory local minimum. We gotaround this difficulty by restarting the algorithm from a new point, denoted by “NEW”in table 5.1.

5.4. Applications 123
plant contr. ε Kp Ki Kd ts (s) zos (%)G1 ZN (init) 10−3 4.0588 0.4388 9.3860 46 .22 46 .92G1 IFT 10−3 3.6717 0.1324 7.7311 21.34 5 .37G1 NS 10−3 3.3315 0.1221 9.3874 20.94 1.95G2 NEW (init) 10−3 0.5000 0.0500 5.0000 319.45 45 .72G2 IFT 10−3 0.9303 0.0309 5.6332 50.15 0.90G2 NS 9.9992 · 10−4 0.9361 0.0305 4.9920 49.35 1.73G3 NEW 10−3 0.5000 0.0100 10.0000 235 .54 0.11G3 IFT 10−3 0.6641 0.0123 12.0959 131.99 1.00G3 NS 10−3 0.6590 0.0121 9.9997 129.91 1.97G4 ZN 10−3 3.5294 0.2101 14.8235 69.22 53 .82G4 IFT 10−3 3.0279 0.0654 18.4075 28.31 0.53G4 NS 10−3 2.8947 0.0615 14.8247 25 .58 1.67
Table 5.1: PID parameters, settling time and overshoot.
0 10 20 30 40 50 60 70 80 90 100
0
0.5
1
1.5
t
z(t)
ZN (initial)IFTNSz
maxz
min
Figure 5.14: G1 step responses withPIDs.
0 50 100 150 200 250 300
0
0.5
1
1.5
t
z(t)
initialIFTNSz
maxz
min
Figure 5.15: G2 step responses withPIDs.
0 50 100 150 200 250 300 350 400 450 5000
0.2
0.4
0.6
0.8
1
1.2
t
z(t)
initialIFTNSz
maxz
min
Figure 5.16: G3 step responses withPIDs.
0 20 40 60 80 100 120 140 160 180 200
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
t
z(t)
ZN (initial)IFTNSz
maxz
min
Figure 5.17: G4 step responses withPIDs.

124 Chapitre 5. Commande temporelle et fréquentielle par techniques non lisses
Finally, we mention that we did not use any temporal mask as is classically done inthe IFT approach to avoid spurious solutions.
5.5 ConclusionWe have described a general and very flexible nonsmooth algorithm to compute locallyoptimal solutions to synthesis problems subject to frequency- or time-domain constraints.Our method offers the new and appealing possibility to integrate controller structures ofpractical interest in the design. We have now several encouraging reports of successfulexperiments, which advocate the use of nonsmooth mathematical programming techniqueswhen it comes to solving difficult (often NP-hard) design problems. The results obtainedin this paper corroborate previous studies on different problem classes. Extension of ournonsmooth technique to problems involving a mixture of frequency- and time-domainconstraints seems a natural next step, which is near at hand. For time-domain design, wehave noticed that the proposed technique assumes very little about the system nature,except the access to simulated responses. A more ambitious goal would therefore considerextensions to nonlinear systems.
AckowledgementsThe authors acknowledge financial support from the Fondation d’entreprise EADS (undercontract Solving challenging problems in feedback control), and from the Agence Nationalede Recherche (ANR) (under project NT05 Guidage).

Chapitre 6
Optimisation non lisse du secondordre pour la synthèse H∞
Les applications développées dans les chapitres précédents s’appuient toutes sur lemême schéma algorithmique d’optimisation non lisse, présenté dans la première partie(section 2.3.3), rappelé et généralisé à plusieurs reprises (sections 3.5.1, 4.2.5 et 5.3). Ils’agit d’une méthode du premier ordre, à convergence R-linéaire en général. Nous avonsdéjà proposé d’affiner le modèle quadratique servant à la construction de la direction dedescente, à l’aide d’une mise à jour de type BFGS (voir section 3.5.2). Sa mise en œuvredans un cadre non différentiable est cependant tout à fait heuristique, et, si un gain enterme de nombre d’itérations a pu être observé sur certains problèmes de stabilisation(chapitre 3), nous ne pouvons cependant conclure de façon générale.
Ce dernier chapitre décrit un algorithme du second ordre pour la synthèse H∞, dontle mécanisme diffère fortement de l’approche précédente : le problème non lisse est toutd’abord reformulé comme un problème semi-infini d’optimisation non linéaire. Celui-ci estensuite ramené par réduction locale à un nombre fini de contraintes, et peut être résolu parla méthode SQP (Programmation Quadratique Successive), dont la convergence locale1est superlinéaire. L’algorithme proposé couple la méthode SQP à l’approche du premierordre précédente, afin de garantir la propriété de convergence globale.
Les expérimentations numériques montrent un apport indiscutable de cette méthode enterme de nombre d’itérations nécessaires pour la convergence. Le gain en temps de calculest cependant moins net : très important dans certains cas, inexistant dans d’autres. Eneffet, la globalisation de l’algorithme s’appuie sur un recours à la méthode du premierordre, et nécessite donc à chaque itération de calculer deux directions : celle de Cauchy(premier ordre) et celle de Newton (SQP), pour lesquelles les gradients et hessiens sontcalculés de manière exacte.
Enfin, ces travaux étant chronologiquement antérieurs aux applications présentées dansles trois chapitres précédents, nous n’avons pas envisagé le cas, pourtant essentiel en pra-tique, des correcteurs structurés. La description de ces travaux dans les pages qui suiventest cependant motivée par leur originalité en regard des développements précédents, et
1Un algorithme d’optimisation converge localement vers un minimum x∗ s’il existe r > 0 tel que pourtout x0 ∈ B(x∗, r), la suite des itérés (xk)k≥0 converge vers x∗. La convergence est dite globale si elle alieu pour tout x0 ∈ Rn.
125

126 Chapitre 6. Optimisation non lisse du second ordre pour la synthèse H∞
par le gain en temps de calcul constaté sur certains exemples.

6.1. Introduction 127
Second-order nonsmooth optimization forH∞ synthesis
V. Bompart, D. Noll and P. Apkarian
Article publié dans Numerische Mathematik,107(3) :433-454, 2007.
AbstractThe standard way to compute H∞ feedback controllers uses algebraic Riccati equationsand is therefore of limited applicability. Here we present a new approach to the H∞ outputfeedback control design problem, which is based on nonlinear and nonsmooth mathemat-ical programming techniques. Our approach avoids the use of Lyapunov variables, and istherefore flexible in many practical situations.
6.1 IntroductionWell designed feedback control systems in high technology fields are expected to respondfavorably to a list of concurring performance specifications such as stability, good reg-ulation against disturbances, desirable responses to commands, robustness, control lawspecifications, system security, and much else. In addition, controllers should be hardwareimplementable at low cost, and should allow a flexible adaption to strategic changes dur-ing the model building process. These ever growing demands have shown the limitationsof currently used mathematical tools for synthesis, which are based on solving algebraicRiccati equations (AREs). The rise of linear matrix inequalities (LMIs) since the early1990s has certainly improved the situation, but the main limitations of these approachespersist.
In response, various new design methods have been proposed since the late 1990s,including methods from global optimization, [16, 18, 138, 124], matrix inequality con-strained nonlinear programming, [50, 86, 87, 14, 134], augmented Lagrangian methods,[49, 106], eigenvalue optimization, [6, 8, 9, 76], and others. Presently we discuss a newstrategy for H∞ output feedback control synthesis, which has several advantages overexisting approaches, because it avoids the use of Lyapunov variables. We shall show thatthis leads to much smaller and better manageable problems, at the price that controllersynthesis becomes a nonsmooth optimization program. We develop local nonsmooth opti-mization strategies suited for this new context, and show that they improve the situationconsiderably.

128 Chapitre 6. Optimisation non lisse du second ordre pour la synthèse H∞
6.2 Problem settingWe consider a linear time-invariant plant described in standard form by the state-spaceequations
P (s) :
xzy
=
A B1 B2C1 D11 D12C2 D21 0p2×m2
xwu
,
where s is the Laplace variable, x ∈ Rn is the state of the system, u ∈ Rm2 the control,w ∈ Rm1 an exogenous signal (noise, commands), z ∈ Rp1 the regulated variable (responseof the system to the input w), and y ∈ Rp2 the measured output. The goal of feedbackcontrol synthesis is to design an output feedback controller
K(s) :[xKu
]=[AK BK
CK DK
] [xKy
]
where xK ∈ RnK , AK ∈ RnK×nK , BK ∈ RnK×p2 , CK ∈ Rm2×nK and DK ∈ Rm2×p2 , suchthat the following three criteria are met:Internal stability: The closed-loop system obtained by substituting K into P is expo-nentially stable.Performance: Among all internally stabilizing controllers, K minimizes the H∞-normof the performance channel w → z.Control law specifications: The controller K may be subject to additional structuralconstraints. For instance, one may look for decentralized controllers, reduced-order con-trollers, PID, feed-forward, lead lag structures, etc.
Let us explain the performance requirement for the case u = Ky of a static outputfeedback controller, where DK = K ∈ Rm2×p2 . Here the closed-loop transfer function forthe performance channel w → z is
Tw→z(K)(s) = D(K) + C(K)(sIn −A(K)
)−1B(K) (6.1)
where the closed loop data are
A(K) = A+B2KC2 B(K) = B1 +B2KD21
C(K) = C1 +D12KC2 D(K) = D11 +D12KD21
For brevity, we shall subsequently write T (K,ω) , Tw→z(K)(jω). Denoting by λ1 themaximum eigenvalue function on the space of Hermitian matrices, and by σ the maximumsingular value of m1 × p1 matrices, we define
f(K,ω) = λ1(T (K,ω)HT (K,ω)) = [σ(T (K,ω))]2 ,
where ZH stands for the conjugate transpose of the complex matrix Z. The square of theH∞ norm is then defined as
‖Tw→z(K)‖2∞ = maxω∈[0,∞]
f(K,ω). (6.2)

6.3. Approach via semi-infinite programming 129
Optimizing the performance of the controller therefore leads to minimizing the functionf(K) = maxω∈[0,∞] f(K,ω) over the set S of all closed-loop exponentially stabilizingcontrollers K ∈ Rm2×p2 . Notice that f is nonsmooth with two possible sources of nons-moothness: (a) the infinite max-operator, and (b) the nonsmoothness of λ1, which maylead to nonsmoothness of f(·, ω) for fixed ω.Remark. A difficulty is that the set of exponentially stabilizing controllers S is open andnot a constraint set in the usual sense of nonlinear programming. We have observed thatit is usually possible to ignore the constraint K ∈ S, and start the minimization (6.3)with an initial closed-loop stabilizing controller K ∈ S. The fact that ‖Tw→z(K)‖∞ isminimized, and therefore stays finite, very often implies closed-loop stability of the limitpoint K. That is why we shall consider program
minK∈Rm2×p2
f(K) = ‖Tw→z(K)‖2∞. (6.3)
under the implicit assumption that iterates Kk and the limit K are closed-loop stabilizing.In those cases where ‖Tw→z(K)‖∞ <∞ does not imply closed-loop stability, a problem
occurs. Here a minimizing sequence Kk ∈ S for (6.3) will converge to a controller K onthe boundary of the domain S. Such a K is not a valid solution of the control problem.Fortunately, the phenomenon is easily detected, and a practical way out is to consider anadditional closed-loop transfer channel Tstab(K, s) = (sI−A(K))−1, called the stabilizingchannel. For a small parameter ε > 0, we may then minimize the objective
f(K) = max(‖Tw→z(K)‖2∞, ε‖Tstab(K)‖2∞
), (6.4)
and we are now sure that f(K) <∞ implies closed-loop stability of K. Notice that f isagain of the form (6.3) if a transfer matrix with the two diagonal blocks Tw→z and εTstabis introduced. ¤Remark. Our approach to H∞ controller synthesis based on program (6.3) differs sub-stantially from standard ways to solve such problems, where the H∞ norm is avoidedand replaced by a matrix inequality using the bounded real lemma [30]. In solving (6.3)directly we dispense with Lyapunov variables, which leads to a spectacular reduction inthe number of unknowns, especially when small controllers for large systems are sought.In exchange we have to deal with nonsmoothness and with semi-infinity, and those areaddressed during the next sections. ¤
First-order nonsmooth optimization methods for (6.3) have for the first time been pro-posed in [6], and have been further developed in [8, 10, 9]. Here we propose a second-orderapproach, which when combined with the first-order technique speeds up the minimizationprocess at the end, improves the final precision, and serves as an additional convergencecertificate.
6.3 Approach via semi-infinite programmingIn the previous section we have introduced program (6.3) for the case of static controllers,and we shall continue to do so because the general case of dynamic K may be reduced to

130 Chapitre 6. Optimisation non lisse du second ordre pour la synthèse H∞
the static case by prior dynamic augmentation of the system. More precisely, the followingsubstitutions are performed:
K →[AK BK
CK DK
], A→
[A 00 0k
]B1 →
[B10
], C1 →
[C1 0
]
B2 →[
0 B2Ik 0
], C2 →
[0 IkC2 0
], D12 →
[0 D12
], D21 →
[0D21
].
(6.5)
Now we have the following
Lemma 6.3.1 . For a closed-loop stabilizing controller K, the set of active frequenciesΩ(K) , ω ∈ [0,∞] : f(K) = f(K,ω) is either finite, or Ω(K) = [0,∞], that is,f(K,ω) = f(K) for all ω.
Proof. Notice that as K is fixed, we are concerned with a one parameter family ω 7→T (K,ω)HT (K,ω) of m1×m1 Hermitian matrices. Here the bundle of the m1 eigenvaluesλi(T (K,ω)HT (K,ω)
)as functions of ω has a very specific structure: it consists of m1
real analytic functions φi(ω), ω ∈ R; see e.g. [79, p. 82, p. 138], or [91]. More precisely,there are m1 real analytic functions φ1, . . . , φm1 such that
σ1(T (K,ω)), . . . , σm1(T (K,ω)) = |φ1(ω)|, . . . , |φm1(ω)|, (6.6)
where σi(T (K,ω)) are the singular values of T (K,ω). In consequence, the maximumeigenvalue function (6.2) is the maximum of m1 real analytic functions φ2
i (ω). These φ2i
are also analytic at ∞, because we are dealing with a stable (proper) transfer matrixT (K,ω), which is rational as a function of ω. (The statement above may be made moreprecise: There exist functions φi which are analytic on a strip B on the Riemann sphereS2 = C ∪ ∞, such that B contains the meridian S1 = R ∪ ∞ passing through thenorth pole ∞, with φi taking real values on S1, such that (6.6) is satisfied for all ω ∈ S1.)
Suppose now Ω(K) is infinite. Then one of these m1 real analytic functions φ2i has an
infinity of maxima on S1 with the same value f(K). Since S1 is compact, these maximahave an accumulation point ω. In terms of the analytic extensions on B, that means theTaylor expansion of the φ2
i in question at ω is the same as the Taylor expansion of thefunction with constant value f(K). This implies indeed φ2
i (ω) = f(K) for all ω. ¤Remark. 1) The stable transfer function φ : s 7→ s−1
s+1 satisfies φ(jω)φ(−jω) = 1, so it istheoretically possible that Ω(K) = [0,∞]. This may even arrive in practice: It is knownthat the so-called central (full order) optimal H∞-controller K∞ renders the frequencyplot ω 7→ f(K∞, ω) flat or all-pass.
2) Notice also that we cannot omit the frequency ω =∞ in the discussion, as witnessedby the stable transfer function φ(s) : s 7→ s+1
s+2 . Here maxω∈[0,∞] φ(jω)φ(−jω) = 1 isattained at ω =∞.
3) The frequencies ω ∈ Ω(K) will be called the peaks of the frequency curve atK. Local maxima of the frequency curve ω 7→ f(K,ω) which are not peaks will becalled secondary peaks. Notice that the above argument also shows that the number ofsecondary peaks is finite. ¤

6.3. Approach via semi-infinite programming 131
For the technical formulas we shall concentrate on those K, where the set of activefrequencies or peaks Ω(K) = ω ∈ [0,∞] : f(K) = f(K,ω) is finite. In practice we havenever observed flat frequency curves when the order of the controller is smaller than theorder of the plant.
During the following we will analyze the case where the multiplicity of
λ1(T (K,ω)HT (K,ω))
is one at all active frequencies ω. This is motivated by practical considerations, becausenonsmoothness (b) never occurred in our tests. The necessary changes required for thegeneral case will be discussed in Section 6.4.3.
It is useful to cast program (6.3) as an equivalent constrained semi-infinite program
minimize tsubject to f(K,ω)− t ≤ 0, ω ∈ [0,∞] (6.7)
with decision variable (K, t). In [67] three approaches to semi-infinite programming arediscussed: exchange of constraints, discretization, and local reduction. Here we use a localreduction method. The main ideas are recalled below; see also [77] for this approach.
Let (K, t), with t = f(K), be a local solution of (6.7). Indexing the active frequenciesΩ(K) = ω1, . . . , ωp at K, we suppose that the following conditions are satisfied
(i) f ′ω(K, ωi) = 0, i = 1, . . . , p.
(ii) f ′′ωω(K, ωi) < 0, i = 1, . . . , p.
(iii) f(K, ω) < f(K), for every ω /∈ Ω(K) = ω1, . . . , ωp.
These assumptions define the setting denoted as the “standard case” in semi-infiniteprogramming [67]. The three conditions express the fact that the frequencies ωi ∈ Ω(K)are the strict global maximizers of f(K, ·). Notice that condition (iii) is the finitenesshypothesis already mentioned, justified by Lemma 6.3.1, while condition (ii) is slightlyconservative, because the necessary optimality condition only tells us that f ′′ωω(K, ωi) ≤ 0.Remark. Notice that f(K, ·) is twice differentiable at each ωi even without the hypothesisthat the maximum singular values of the T (K, ωi) have multiplicity 1. This is because themaximum singular value function ω → σ(G(jω)) of a stable transfer matrix G is alwaystwice continuously differentiable at its local maxima [28]. ¤
Conditions (i) and (ii) allow the implicit function theorem, according to which we canfind a neighborhood U of K, and neighborhoods Vi of ωi (i = 1, . . . , p), together withC1-functions ωi : U → Vi, such that the following conditions are satisfied
(iv) ωi(K) = ωi, i = 1, . . . , p.
(v) f ′ω (K,ωi(K)) = 0, i = 1, . . . , p.
(vi) Whenever K ∈ U and ω ∈ Vi satisfy f ′ω(K,ω) = 0, then ω = ωi(K).

132 Chapitre 6. Optimisation non lisse du second ordre pour la synthèse H∞
Condition (ii) says f ′′ωω(K, ωi) < 0, so by shrinking U if required, we may arrange thatf ′′ωω (K,ωi(K)) < 0 for K ∈ U . Then ωi(K) are local maxima of f(K, ·). Moreover, by(vi), ωi(K) is the only critical point of f(K, ·) in Vi. We then have the following
Lemma 6.3.2 . Under conditions (i) – (iii) the neighborhood U of K may be chosensuch that max
ω∈[0,∞]f(K,ω) = max
i=1,...,pf(K,ωi(K)) for every K ∈ U . In particular, Ω(K) ⊂
ω1(K), . . . , ωp(K) for every K ∈ U .
Proof. Choose U and Vi such that conditions (iv) - (vi) are satisfied. Suppose thatcontrary to the statement there exists a sequence Kr → K such that
mr , maxi=1,...,p
f(Kr, ωi(Kr)) < maxω∈[0,∞]
f(Kr, ω) =: Mr.
Pick ωr where the maximum Mr is attained. Passing to a subsequence, we may assumeωr → ω∗ for some ω∗ ∈ [0,∞]. Since mr → f(K) and Mr → f(K), we have f(K) =f(K, ω∗). By axiom (iii), that means ω∗ = ωi for some i = 1, . . . , p. Then (Kr, ω
r) ∈ U×Vifrom some index r0 onwards.
But f ′ω(Kr, ωr) = 0, because ωr is a maximum at Kr, so condition (vi) implies ωr =
ωi(Kr). That shows mr = Mr for r ≥ r0, a contradiction. ¤Altogether, we have shown that program (6.3) is locally equivalent to the standard
constrained nonlinear program
minimize tsubject to f (K,ωi(K))− t ≤ 0, i = 1, . . . , p (6.8)
which we may solve via a SQP method. In the next section we will discuss how thisshould be organized, and that the jet information may be computed efficiently. Localconvergence of this approach will be assured under the following hypothesis
(vii) f ′K(K, ω1), . . . , f ′K(K, ωp) are linearly independent
because this guarantees that program (6.8) satisfies the linear independence constraintqualification hypothesis (LICQ).
6.4 Solving with SQP6.4.1 Quadratic tangent subproblemIn this section we assume that for K in a neighborhood of K, the set ω1(K), . . . , ωp(K)is available. The computation of this set will be discussed in Section 6.5.1.
In order to derive the tangent quadratic program for (6.8), let us write Gi(K, t) =f (K,ωi(K))− t, F (K, t) = t. The Lagrangian of (6.8) is then
L(K, t; τ) = F (K, t) +p∑
i=1τ iGi(K, t),

6.4. Solving with SQP 133
so that
L′K(K, t; τ) =p∑
i=1τ i (f ′K (K,ωi(K)) + f ′ω (K,ωi(K))ω′i(K))
=p∑
i=1τ if ′K (K,ωi(K))
using condition (v) above. Similarly,
L′t(K, t; τ) = 1−p∑
i=1τ i.
The second-order elements are L′′Kt (K, t; τ) = 0, L′′tt (K, t; τ) = 0, and
L′′KK(K, t; τ) =p∑
i=1τ i[f ′′KK (K,ωi(K))
+f ′ω (K,ωi(K))ω′′i (K)+f ′′ωK (K,ωi(K))ω′i(K)>]
=p∑
i=1τ i[f ′′KK (K,ωi(K)) + f ′′ωK (K,ωi(K))ω′i(K)>
],
again using condition (v). Differentiating (v) gives
0 = f ′′ωK (K,ωi(K)) + f ′′ωω (K,ωi(K))ω′i(K),
which allows us to express ω′i(K) through derivatives of f . Altogether,
L′′(K, t; τ) =[L′′KK(K, t; τ) 0
0 0
]
with
L′′KK(K, t; τ) =p∑
i=1τ i[f ′′KK (K,ωi(K))
− f ′′ωK (K,ωi(K)) f ′′ωω (K,ωi(K))−1 f ′′ωK (K,ωi(K))>].
The tangent quadratic program is now
minimize δt+ 12δK
>L′′KK(K, t; τ)δK
subject to f (K,ωi(K)) + f ′K (K,ωi(K))> δK − t− δt ≤ 0,i = 1, . . . , pδt ∈ R, δK ∈ Rm2×p2
(6.9)

134 Chapitre 6. Optimisation non lisse du second ordre pour la synthèse H∞
6.4.2 First and second derivative formulasWe first recall some useful results from matrix perturbation theory, concerning the firstderivatives of a nondegenerate eigenvalue and an associated eigenvector. General formulaemay be found in [61]. We specialize to the case of a Hermitian matrix depending on realparameters: given A(u), a n×n complex Hermitian matrix depending smoothly on u ∈ Rp,we denote by λ1(u) ≥ · · · ≥ λn(u) the eigenvalues of A(u), and by
(q1(u), . . . , qn(u)
)an
orthonormal basis of eigenvectors, such that
A(u) = Q(u)Λ(u)Q(u)H ,Λ(u) = diag
(λ1(u), . . . , λn(u)
)and
Q(u) =[q1(u), . . . , qn(u)
].
For a fixed k and a given u0 ∈ Rp, under the assumption that λk(u0) is a simple (nonde-generate) eigenvalue of A(u0), λk and qk are differentiable at u0, and for all δu in Rp, wehave
λ′k(u0).δu = qk(u0)H(A′(u0).δu
)qk(u0)
q′k(u0).δu =n∑
i=1i6=k
qi(u0)H(A′(u0).δu
)qk(u0)
λk(u0)− λi(u0)qi(u0)
Notice from the second equality that q′k(u0).δu is orthogonal to the eigenvector qk(u0).Furthermore we derive from these expressions that λk is twice differentiable at u0, and
for all δu1, δu2 in Rp, dropping the dependency on u0 for the right hand side terms, weget
λ′′k(u0).(δu1, δu2) = qHk (A′′.(δu1, δu2)) qk
+ 2 Re
n∑
i=1i6=k
qHk (A′.δu1) qiqHi (A′.δu2) qkλk − λi
.
We specialize to the case of f(K,ω), the squared maximum singular value of thetransfer matrix T (K,ω). Then u = (K,ω) and A(u) = A(K,ω) = T (K,ω)HT (K,ω), andf = λ1 A.
We note eigenvalues of T (K,ω)HT (K,ω) as (λi)1≤i≤m1 and an orthonormal basis ofassociated eigenvectors as (qi)1≤i≤m1 . We drop the dependency on K and ω for ease ofnotation. We assume that λ1 > λ2 ≥ λ3 ≥ · · · ≥ λm1 . Applying the above formulae gives:
f ′K(K,ω).δK = 2 Re(qH1 T
H(T ′K .δK)q1)
f ′ω(K,ω) = 2 Re(qH1 T
HT ′ωq1)

6.4. Solving with SQP 135
f ′′KK(K,ω).(δK1, δK2) = 2 ReqH1
((T ′K .δK2)HT ′K .δK1 + THT ′′KK .(δK1, δK2)
)q1
+m1∑
i=2
qH1(THT ′K .δK1 + (T ′K .δK1)HT
)qiq
Hi
(THT ′K .δK2 + (T ′K .δK2)HT
)q1
λ1 − λi
f ′′ωω(K,ω) = 2 ReqH1
(T ′ω
HT ′ω + THT ′′ωω
)q1
+ 2
m1∑
i=2
∣∣∣qH1(THT ′ω + T ′ω
HT)qi∣∣∣2
λ1 − λi
f ′′ωK(K,ω).δK = 2 ReqH1
((T ′K .δK)HT ′ω + THT ′′ωK .δK
)q1
+m1∑
i=2
qH1(THT ′ω + T ′ω
HT)qiq
Hi
(THT ′K .δK + (T ′K .δK)HT
)q1
λ1 − λi
The first and second partial derivatives of the transfer function T can be expandedwith the closed-loop state-space matrices A, B and C. Starting out with formula (6.1),we derive
T ′K .δK = T ′K(K,ω).δK
=(D12 + C
(jωIn −A
)−1B2
)δK
(C2(jωIn −A
)−1B +D21
)
T ′′KK .(δK1, δK2) = T ′′KK(K,ω).(δK1, δK2)
=(D12 + C
(jωIn −A
)−1B2
)
(δK2C2
(jωIn −A
)−1B2δK1 + δK1C2
(jωIn −A
)−1B2δK2
)
(D21 + C2
(jωIn −A
)−1B)
T ′ω = T ′ω(K,ω) T ′′ωω = T ′′ωω(K,ω)
= −j C(jωIn −A
)−2B = −2 C(jωIn −A
)−3B
T ′′ωK .δK = T ′′ωK(K,ω).δK
= −j((
D12 + C(jωIn −A
)−1B2
)δK
(C2(jωIn −A
)−2B)
+(C(jωIn −A
)−2B2
)δK
(D21 + C2
(jωIn −A
)−1B))

136 Chapitre 6. Optimisation non lisse du second ordre pour la synthèse H∞
Introducing the following transfer matrices
F (K,ω) =(jωIn −A(K)
)−1G12(K,ω) = D12 + C(K)F (K,ω)B2
G21(K,ω) = D21 + C2F (K,ω)B(K) G22(K,ω) = C2F (K,ω)B2.
we finally get
T ′K .δK = G12δKG21
T ′′KK .(δK1, δK2) = G12
(δK2G22δK1 + δK1G22δK2
)G21
T ′ω = −jCF 2BT ′′ωω = −2CF 3B
T ′′ωK .δK = −j(G12δKC2F
2B + CF 2B2δKG21
).
Remark. Notice that the transfer matrices F , T , G12, G21 and G22 can be reliably andefficiently evaluated at the active frequencies ω ∈ Ω(K) with a Hessenberg method, asexplained in [82]. ¤
Altogether, we have proved the following
Proposition 6.4.1 . Suppose λ1(T (K,ωi)HT (K,ωi)
)has multiplicity 1 for every ωi ∈
ω1(K), . . . , ωp(K). Then the frequency response (w1, w2)→ (z1, z2) of the plantxz1z2
=
A(K) B(K) B2C(K) D(K) D12C2 D21 0p2×m2
xw1w2
,
can be used to compute all the jet elements of tangent program (6.9). Indeed, it sufficesto partition in order to get T , G12, G21 and G22:
T (K,ω) = Tw1→z1(K, jω) G12(K,ω) = Tw2→z1(K, jω)G21(K,ω) = Tw1→z2(K, jω) G22(K,ω) = Tw2→z2(K, jω)
¤Similar formulae for the derivatives of the transfer function T are obtained for dynamic
controllers, using the substitutions (6.5). Proposition 6.4.1 has the practical consequencethat the jet information for (6.9) may be computed using the MATLAB control toolenvironment. Our experience shows that this works efficiently even for systems withseveral hundreds of states.
6.4.3 Multiple eigenvaluesThe working hypothesis of the previous section was that leading eigenvalues
λ1(T (K,ωi(K))HT (K,ωi(K)
)

6.4. Solving with SQP 137
had multiplicity 1 for all frequencies in the set ω1(K), . . . , ωp(K) and for all K in aneighborhood of K. This hypothesis is motivated by our numerical experience, where wehave never encountered multiple eigenvalues. This is clearly in contrast with experiencein pure eigenvalue optimization problems, where multiplicity of limiting elements is > 1as a rule, causing failure of those numerical methods which assume smoothness of themaximum eigenvalue function.
Nonetheless, our approach is still functional if the hypothesis of single eigenvalues atpeak frequencies is dropped. What is needed is the weaker assumption that the eigenvaluemultiplicities ri at the limit point K are known for all active frequencies ωi, i = 1, . . . , p.More precisely, λ1
(T (K, ωi)HT (K, ωi
)has multiplicity ri, i = 1, . . . , p, and for K suffi-
ciently close to K, we have a mechanism to reliably guess ri, based solely on the informa-tion at the current iterate K.
This situation has been discussed by several authors, see e.g. [51, 108, 109, 105].With ri known, SQP can still be applied as follows. Consider X ∈ Sm1 where λ1(X) hasmultiplicity r. We replace the maximum eigenvalue function λ1 by the average of the firstr eigenvalues
λr (X) = 1r
r∑
ν=1λν (X) .
This function is smooth in a neighborhood of the smooth manifoldMr = X ∈ Sm1 : λ1(X) = · · · = λr(X) > λr+1(X)
of Hermitian matrices X ∈ Sm1 with eigenvalue multiplicity r, and λ1 = λr onMr. Themanifold has co-dimension d , r(r+1)
2 − 1 in Sm1 , and in a neighborhood of X may bedescribed by d equations h1(X) = 0, . . . , hd(X) = 0. The tangent space of Mr can becomputed, see [128, 109], and an SQP approach may be derived, if hypotheses (i) and(ii) are suitably modified. For pure eigenvalue optimization, this has been discussed in[105]. The extension to the semi-infinite case is clear under the finiteness assumption(iii). Introducing natural analogues of conditions (i), (ii), see for instance [67], we maythen approach minimization of the H∞-norm along the same lines and obtain the finiteprogram
minimize t
subject to λri(T (K,ωi(K))HT (K,ωi(K))
)≤ t
T (K,ωi(K))HT (K,ωi(K)) ∈Mri
i = 1, . . . , pwith decision variables (K, t). Its tangent quadratic program uses the explicit form of thetangent space T (Mr, X) given in [128].
The case of multiple eigenvalues therefore requires two separate estimation steps. Asbefore we have to select p primary and secondary peaks. Then we have to estimate theeigenvalue multiplicity for each T (K,ωi)HT (K,ωi). There exist indeed practically usefulways to estimate the limiting multiplicity r = ri of λ1 for each frequency ωi. For instance,with a small threshold τ > 0, a guess r of r could be obtained by letting
λ1 − λr < τ max1, |λ1|, λ1 − λr+1 ≥ τ max1, |λ1|.We leave the details of this extension to the care of the reader.

138 Chapitre 6. Optimisation non lisse du second ordre pour la synthèse H∞
6.4.4 Globalisation via trust-region
Independently of whether or not the eigenvalue multiplicity at the active and nearly activefrequency peaks is 1, the local program (6.8) remains dependent on the characteristics ofthe local solution (K, t) of (6.7), because the number p of primary and secondary peaksmay vary. Using Helly type theorems, an upper bound for p may be derived, see e.g. [67,Thm. 4.2]. For a controller K of order k we have p ≤ (m1 + k)(p1 + k) peaks, but this ispessimistic as a rule. In order to stabilize our method, we will therefore use a trust regionstrategy.
In order to control the step quality computed at a given primal-dual pair (K, t; τ),we use the following `1-merit functions φ1 and ψ1, respectively associated with the localprogram (6.8) and the tangent program (6.9);
φ1(K, t;µ) = t+ 1µ
p∑
i=1[f (K,ωi(K))− t]+
ψ1(δK, δt;µ) = δt+ 12δK
>L′′KK(K, t; τ)δK+
1µ
p∑
i=1[δK>∇f (K,ωi(K))− δt
+ f (K,ωi(K))− t]+.
The agreement between the actual reduction and the predicted reduction is measured bythe ratio
ρ = φ1(K, t;µ)− φ1(K + δK, t+ δt;µ)ψ1(0;µ)− ψ1(δK, δt;µ) . (6.10)
Then the trust-region radius is managed according to the following algorithm, based ona basic trust-region algorithm from [45].

6.4. Solving with SQP 139
Fix 0 < η1 ≤ η2 < 1, 0 < θ < 1.
1. Initialize. Find an initial closed-loop stabilizing controller K0. Fix t0 =f(K0), p0 and τ0 ∈ Rp0+ , and set counter k = 0.
2. Peak estimation. Given current Kk and τk ∈ Rpk−1+ , estimate number
pk and positions of primary and secondary peaks ω1(Kk), . . . , ωpk(Kk).3. Model inconsistency. If pk differs from pk−1, or if last step taken was
Cauchy step, then modify old τk ∈ Rpk−1+ or create a new consistent
multiplier vector τk ∈ Rpk+ .4. Initialize Newton method. Put Kk,0 = Kk, τk,0 = τk.
Set ∆0 = 1 if k = 0 or if k ≥ 1 and Kk = KC
Otherwise, set ∆0 = ∆j+1.Set counter j = 0.
5. Newton step. Use current iterate Kk,j , multiplier estimate τk,j and trustregion radius ∆j to solve (6.9) and generate Newton trial step Kk,j+1, withassociated multiplier estimate τk,j+1 ∈ Rpk+ .
6. Decision. Compare predicted progress in the local quadratic model ψ1 toprogress in φ1 using progress ratio ρj+1 in (6.10). There are two cases:
Step accepted: ρj+1 ≥ η1. If even ρj+1 ≥ η2 and ‖Kk,j −Kk,j+1‖= ∆j , then double radius ∆j+1 = 2∆j . Otherwise keep ∆j+1 = ∆j .Put KN = Kk,j+1 and pN , f(Kk)− f(KN ). Goto step 7.Step refused: ρj+1 < η1. Put ∆j+1 = ∆j/2, increase counter j, andgo back to step 5.
7. Cauchy step. Given the current iterate Kk, compute a Cauchy step KC
away from Kk using the first-order method described in [8]. Let pC ,f(Kk)− f(KC) ≥ 0 be first-order progress. If pN ≥ θpC let Kk+1 = KN ,and τk+1 = τk,j+1, otherwise put Kk+1 = KC .
8. Stopping test. If accepted step Kk+1 ∈ KN ,KC offers no progressover Kk, stop. Otherwise increase counter k and go back to step 2.
In the inner loop j, the penalty parameter µj for the expressions φ1, ψ1 is initialized atj = 0 with µ0 = (‖τ1‖∞ + α)−1 and updated according to the following rule for j ≥ 1,with a chosen constant α > 0
µj =µj−1 if µ−1
j−1 ≥ ‖τj+1‖∞ + α,
(‖τj+1‖∞ + 2α)−1 otherwise,
In this way, µj < ‖τj+1‖−1∞ and the `1 merit function ψ1 is exact (see [103]).
Notice that the trust region procedure in the inner loop j between steps 4 and 6 followsstandard lines, but is based on the guess p and ω1(K), . . . , ωp(K) of model (6.8), so afew comments are in order here. Namely, since the model may be incorrect, the followingphenomenon may be observed. The Newton step may be successful with regard to (6.8),i.e., with regard to the inner loop, but may nevertheless fail when matched with realityin step 7. This is when the first order step KC takes over. In the worst case, our methodtherefore converges with the speed of the underlying first-order technique [8]. Alternativefirst-order methods which could be used instead are for instance [117, 97, 10, 9].

140 Chapitre 6. Optimisation non lisse du second ordre pour la synthèse H∞
A second phenomenon, which also arises due to the necessity to guess p, is addressedin step 3. It may happen that the new Kk+1 ∈ KN , KC is no longer consistent withthe old model used in the previous step, because the number p had to undergo a change,or because a first-order step KC had to be taken. The multiplier estimate τk+1 = τk,j+1from the last instance of step 6 is then of little use. We then restart multipliers afresh, orwe recycle the old ones.
Finally, when p and ωi(K) have been estimated correctly, the quadratic model willultimately produce steps with quadratic progress. This means the test in step 8 willultimately accept the Newton step, showing that our method has a fair chance to givelocal quadratic convergence.
Notice that two kinds of stopping tests are needed. We have to apply a standard secondorder test in order to halt the inner loop j if too small a trust region radius (indicatingfailure) arises. But even when the inner loop j is stopped with a successful step KN , thefirst-order step KC may override this decision in cases where the model was incorrect. Itmay even happen that the Newton model alerts a local minimum (KN = Kk), but KC
allows to decrease the function value further. These cases are covered by the test in step8.
6.5 Technical aspects6.5.1 Identifying peak frequenciesIt is important to observe that our approach differs substantially from standard semi-infinite programming methods in so far as we have a highly efficient procedure to evaluatethe H∞ norm of the transfer channel at a fixed closed-loop stabilizing controller K ∈R(m2+k)×(p2+k).
Computing peak frequencies can be based on a classical algorithm for estimating theL∞ norm of a transfer matrix G(s) = D + C(sI − A)−1B explained in detail in [28];see also the variations in [28, 31, 54]. This algorithm detects in the first place the peakfrequencies Ω(K), but may also be used to estimate secondary peaks. Its basic version isthe following:
Computing ‖G‖∞
1. Initialization. Find initial γ such that σ(D) ≤ γ ≤ ‖G‖∞.Fix tolerance ε > 0.
2. Step. For current γ, find the frequency intervals I1, . . . , I`where σ(G(jω)) > γ. If none is found, return the current γ.
3. Update. Otherwise let ωk be the midpoint of Ik. Updateγ+ = (1 + ε) maxk=1,...,`G(jωk). Go back to step 2.
The returned value γ satisfies γ ≤ ‖G‖∞ < (1 + ε)γ on exit, which guarantees a relativetolerance ε for ‖G‖∞ as well as for the positions of the peak frequencies. Secondary peaksmay be estimated in several ways.

6.5. Technical aspects 141
A first idea is to detected them on the way. Each interval Ik occurring in step 2above contains one or several primary or secondary peaks. If an interval Ik at level γdoes not have a successor at level γ+, we conclude that a secondary peak ωi ∈ Ii withf(K,ωi) ∈ [γ, γ+) has been left behind. Fixing a threshold α ∈ (0, 1), we keep thosesecondary peaks ωi with value f(K,ωi) > α‖G‖∞. Since the values and slopes of thecurve ω 7→ f(K,ω) at the endpoints of the Ik are known, and since the peak value is inthe range [γ, γ+), a polynomial estimation of the ωi is usually quite accurate.
A second more direct way to estimate secondary peaks is the following: As soon asthe above algorithm is stopped at the final γ, the imaginary eigenvalues of H(γ) indicateprimary peaks. After fixing the threshold αγ, we keep those complex eigenvalues λ ofH(γ) which lie in the strip αγ ≤ Reλ < γ, and choose ω = Reλ as our set of secondarypeaks. This method is elegant as it also allows to estimate p very reliably.
It is clear that the above methods can be combined, and more sophisticated ways toestimate secondary peaks can be imagined. However, it should be maintained that know-ing ωi(K) to a high precision if f(K,ωi(K)) < f(K) is not necessary, as the constraint iscurrently inactive. The closer the secondary peaks come to being active, the higher theprecision to which they are computed.
Detecting intervals Ik where σ(G(jω)) > γ is based on the Hamiltonian matrix
H(γ) =(A 00 −A>
)−(
0 BC> 0
)(γI DD> γI
)−1 (C 00 −B>
).
We use the fact that
Lemma 6.5.1 . γ is a singular value of G(jω) if and only if jω is an eigenvalue of H(γ).
Remark. Our approach is robust with respect to the estimation of the cardinality p ofthe unknown set Ω(K). If we overestimate p, we create a program (6.8), where someconstraints remain inactive near K, a situation which is automatically dealt with by theSQP solver. What is needed to justify this situation theoretically is an implicit functionfor any of these additional secondary peaks. That may be assured by extending conditions(i) and (ii) to secondary peaks. ¤
6.5.2 Stopping criteriaWe implemented two stopping tests in order to check convergence. The first of themchecks criticality of the iterate (Kk, tk) with multipliers τk, through the absolute test
‖L′(K,t)(Kk, tk; τk)‖ < ε1,
where ‖ · ‖ is a norm on Rm2×p2+1.The second stopping condition checks the relative step length on the decision variables
‖(Kk, tk)− (Kk−1, tk−1)‖ = ‖(δK, δt)‖ < ε2(1 + ‖(Kk−1, tk−1)‖)As some SQP iterates may become infeasible for problem (6.8), we also check if
f(K,ωi(K)) − t < ε for all i = 1, . . . , p. The algorithm stops as soon as the currentiterate is feasible and one of the stopping tests is satisfied.

142 Chapitre 6. Optimisation non lisse du second ordre pour la synthèse H∞
6.6 Numerical resultsThe results presented here were obtained with the algorithm described in section 6.4.4.The plants are taken from [84], and the acronyms refer to that reference and allow toretrieve the data from the literature.
At every iteration, Newton and Cauchy steps are generated, and the one giving bestprogress is performed. In order to initialize the method, a closed-loop stabilizing controlleris computed in the initial phase (step 1) of the algorithm. This first stage uses first-ordernonsmooth techniques for minimizing the closed-loop spectral abscissa, as described in[25]. Alternatively, derivative-free methods have been successfully used for stabilization(see [6]) if the controller size is not too large. If no prior information on K is available,we start this preliminary stabilization phase at K = 0. Then the initial multipliers forSQP are set to τ i0 = 1
pfor i = 1, . . . , p.
Test example AC7 (transport airplane from [84]) has been given special attention,because it is possible to visualize iterates in controller space (Figure 6.2). This exam-ple highlights the benefits of the second order algorithm (denoted by NS2) in termsof convergence speed, compared to the nonsmooth first-order method from [8] for H∞synthesis (denoted by NS1). As required in step 1, a closed-loop stabilizing static con-troller K0 = [4.5931 1.2164] is first computed. The initial closed-loop H∞ performanceis ‖Tw→z(K0)‖∞ = 1.4614, which after optimization is reduced to the optimal value‖Tw→z(K)‖∞ = 6.5091 · 10−2.Table 6.1 shows that the gain of the second-order algorithmNS2 over the existing methodNS1 is significant in terms of the number of iterations and CPU.
Alg. iterations CPU H∞ optimality finalCauchy Newton time (s) norm criteria |Ω|
NS1 434 0 95.42 6.5098 · 10−2 −9.7008 · 10−6 2NS2 2 11 12.23 6.5091 · 10−2 9.4168 · 10−6 2
Table 6.1: H∞ synthesis: transport airplane (AC7).
Notice that the optimality criteria for the first and second order methods are different:a nonpositive optimality function for NS1 (see [8] for details), and the norm of theLagrangian gradient for NS2 (as defined in section 6.5.2).
The resulting controllers are respectively KNS1 = [2.0331 1.8446 · 10−3] and KNS2 =[2.0330 1.9655 · 10−3]. Both KNS1 and KNS2 have two active frequencies. In the caseof KNS2 these are ω1 = 1.9067 and ω2 = 1.3057 · 10−1, in rad.s−1, with almost linearlydependent gradients
f ′K(KNS2, ω1) =[
3.2855 · 10−3
−4.6984 · 10−3
],
f ′K(KNS2, ω2) =[−3.9785 · 10−3
5.6738 · 10−3
].
Figure 6.1 quantifies the convergence rates. Our second-order algorithm (NS2) startswith two Cauchy steps, then SQP takes over and converges superlinearly within only11 Newton iterations. In contrast, with Cauchy steps only (NS1), a slow first-order

6.6. Numerical results 143
convergence occurs. The iterates and contour lines of the H∞ norm are drawn in Figure6.2.
50 100 150 200 250 300 350 40010
−1
100
101
102
103
104
105
iteration
AC7 : convergence rate estimation for NS1
||K
k+1−K
NS1|| / ||K
k−K
NS1||
||Kk+1
−KNS1
|| / ||Kk−K
NS1||2
2 4 6 8 10 1210
−3
10−2
10−1
100
101
iteration
AC7 : convergence rate estimation for NS2
||K
k+1−K
NS2|| / ||K
k−K
NS2||
||Kk+1
−KNS2
|| / ||Kk−K
NS2||2
Figure 6.1: Convergence rates of NS1 and NS2 for AC7. NS1 shows linear convergencewith rate close to 1 (left). NS2 gives quadratic convergence (right).
AC7 : H∞ contour levels and NS1 iterates
K1
1 2 3 4 5
0
0.2
0.4
0.6
0.8
1
1.2
AC7 : H∞ contour levels and NS2 iterates
K1
K2
1 2 3 4 5
0
0.2
0.4
0.6
0.8
1
1.2K0
KNS1
K0
KNS2
Figure 6.2: Iterates in controller space for NS1 (left) and NS2 (right). NS2 is signifi-cantly faster despite the change of peaks caused by the nonsmoothness.
Table 6.2 shows various other tests from [84], illustrating that the second-order methodcan speed up convergence by decreasing the number of iterations. The extra work neededfor a second-order iteration, that is, defining the tangent quadratic program (6.9), locat-ing peak frequencies, and computing first and second derivatives to solve it, is usuallycompensated by the reduction of the number of steps. For plants where the first-order

144 Chapitre 6. Optimisation non lisse du second ordre pour la synthèse H∞
method gives little progress and iterates many times (like AC7 or HE2), the gain is dra-matic. Other examples like REA3 show less significant gain or no gain at all, (AC6, AC8)in cases where no superlinear convergence occurs. Nonetheless, attempting second ordersteps is generally beneficial, because the final precision is improved (AC10).
plant n m2 p2 alg. iter CPU (s) H∞ |Ω(K)|AC6 7 2 4 NS1 79 30.28 4.1140 2
NS2 25 41.45 4.1140 2AC7 7 1 2 NS1 434 95.42 6.5098 · 10−2 2
NS2 13 12.23 6.5091 · 10−2 2AC8 9 1 5 NS1 14 23.50 2.0050 4
NS2 9 37.20 2.0050 4AC10 55 2 2 NS1 74 206.16 1.3244 · 101 2
NS2 35 187.47 1.3236 · 101 5AC10∗ 55 2 2 NS1 82 762.65 1.3251 · 101 1
NS2 71 877.18 1.3237 · 101 5HE2 4 2 2 NS1 746 196.20 4.2495 2
NS2 12 14.67 4.2492 2REA3 12 1 3 NS1 23 14.18 7.4251 · 101 1
NS2 9 11.06 7.4251 · 101 1
Table 6.2: H∞ synthesis: comparison of NS1 and NS2 on various plants. AC stands foraircraft models, HE for a helicopter model, and REA for a chemical reactor model.
An interesting case highlighting the importance of the final precision is the bench-mark study Boeing 767 under flutter condition, which we have tested with two differentscenarios, labeled AC10 and AC10∗. In a first test, AC10, model (6.3) is used. Herethe first-order method NS1 converges after 74 iterates. The second order method NS2
Alg. iterations CPU H∞ optimality finalCauchy Newton time (s) norm criteria dist
NS1 74 0 206.16 1.3244 · 101 −5.4287 · 10−2 3.4000 · 10−5
NS2 28 7 187.47 1.3236 · 101 1.1926 · 10−6 3.3987 · 10−5
Table 6.3: Comparison of NS1 and NS2 for large scale example Boeing 747 under fluttercondition (AC10). Column ’dist’ shows final distance to instability.
needs 35 steps and converges quadratically. Despite the higher cost for setting up andcomputing second order steps, this leads to a better CPU. What is more important inthis example, however, is that the second order stopping test is much more stringent(second column from the right in Table 6.3) than for the first order method. This isparticularly significant for the Boeing 767 example, because iterates of both NS1 andNS2 get extremely close to the hidden boundary of the stability region. The rightmostcolumn of Table 6.3 gives the distance to instability of the two solutions, and iterates onthe way have approximately the same distance. For NS1 it is therefore impossible todecide whether the optimal solution is strictly inside or on the boundary of the stabilityregion, because the final precision (the size of the steps before stopping) is comparablein magnitude to the distance to instability. In contrast, for NS2, the higher precisionof the stopping test allows to conclude that the local minimum of NS2 is indeed insidethe stability region. In this example the NS1 solution has only two active peaks, while

6.7. Conclusion 145
NS2 finds 5 peaks, which gives further evidence that NS1 indeed fails to converge, (eventhough the solution is still reasonable from a control point of view).
In this study the stability region turns out extremely narrow, which explains numericaldifficulties with this example in the past. We have therefore performed a second test,labeled AC10∗, where a stabilizing channel as in (6.4) is added to the objective (6.3).Not surprisingly, as the transfer channel is now much larger, this almost doubles CPUtimes, even though the number of steps is practically the same. The controllers obtainedare fairly similar to those obtained for AC10, but with AC10∗ closed-loop stability of thelimit K can now be certified. In the numerical testing the parameter ε in (6.4) was chosensuch that for the initial iterate K0, ‖Tw→z(K0)‖2∞ = 4ε‖(sI − A(K0))−1‖2∞, which gaveε = 2.3150 · 10−4.
We mention that adding the stabilizing channel does not resolve the intrinsic difficultyof this example, caused by the fact that the objective function in (6.3) or (6.4) is onlydefined on a narrow region.
6.7 ConclusionWe have developed and tested a second-order method to compute static and reduced-order H∞-controllers and more general synthesis problems with structural constraints onthe controller. Our approach avoids the use of Lyapunov variables and therefore leads tosmall or medium size optimization programs even for large systems (AC10 with 55 states).We use a methodology from semi-infinite programming to obtain a local nonlinear pro-gramming model and apply a trust region SQP method. A first-order nonsmooth spectralbundle method is used to initialize the second-order algorithm in the neighbourhood of alocal solution. Our numerical testing indicates that speed of convergence and numericalreliability may be improved by using the second-order method.

146 Chapitre 6. Optimisation non lisse du second ordre pour la synthèse H∞

Conclusion
Les problèmes de synthèse par retour de sortie, avec un correcteur structuré ou d’ordreréduit, sont des problèmes difficiles de l’Automatique, pour lesquels les méthodes de réso-lutions actuelles ne donnent pas toujours satisfaction, quand elles ne sont pas inopérantes.
Les travaux de cette thèse se sont fondés sur un parti-pris original : formuler et résoudreces problèmes dans le contexte général de l’Optimisation, en dépit de leurs mauvaisespropriétés (ils sont non linéaires bien évidemment, non convexes, et surtout non lisses).Les difficultés sous-jacentes ont été levées en proposant deux approches distinctes.
La première d’entre elles, basée sur les travaux de Polak, est une méthode de descentenon lisse, avec recherche linéaire. Cette approche s’est avérée riche, flexible et performante.Riche, parce que nous avons pu la mettre en œuvre pour des critères de synthèse denatures différentes (chapitres 3 à 5). Flexible, ensuite, parce que les contraintes portantsur la structure ou l’ordre du correcteur peuvent être directement et simplement prises encompte. Performante, enfin, comme cela est souligné dans la variété des exemples traités :pour certains d’entre eux (chapitres 4 et 5), nous avons amélioré des résultats obtenus parles méthodes existantes, avec des temps de calcul beaucoup plus courts.
La seconde approche (chapitre 6) a été étudiée pour la synthèseH∞. Elle s’appuie sur larésolution d’un sous-problème local, différentiable, par SQP avec région de confiance. Elleoffre une convergence rapide, mais cette convergence n’est que locale, ce qui nécessite derecourir à l’approche précédente tant qu’un bassin d’attraction n’est pas atteint. Elle s’estavérée assez délicate à mettre en œuvre, plus sensible à la taille des problèmes, et fortementdépendante de son initialisation. Cette seconde approche vient donc en complément dela première, dans les cas où apparaît le phénomène de convergence lente, typique desméthodes de descente du premier ordre.
Nous souhaitons enfin souligner que la plupart des problèmes de commande abordésdans cette thèse ne sont pas convexes a priori. Si l’optimisation non lisse permet d’utiliserune information de nature différentielle sur les fonctions à minimiser, elle reste cepen-dant tributaire de l’existence de plusieurs minima locaux. Ainsi, pour une initialisationdonnée, chacune des approches proposées converge vers un minimum local ; une nouvelleinitialisation avec un autre correcteur peut conduire après optimisation à un tout autreminimum local, associé à une valeur différente du critère de synthèse. Dans de nom-breux cas, et lorsque le système n’est pas trop complexe, la connaissance ingénieur duproblème de commande à résoudre permet d’initialiser l’optimisation avec des valeurs degains empiriques. Lorsque cela n’est pas possible, il incombe à l’utilisateur de diversifierles initialisations afin d’explorer l’espace de recherche. Nos approches restent cependantdéterministes : un même point initial donnera toujours le même minimum local, ce qui
147

148 Conclusion
semble raisonnable pour des problèmes de conception.Les travaux menés au cours de cette thèse se sont concentrés sur la minimisation de la
norme H∞ par des techniques non lisses. Nous avons montré que cette approche permet-tait de résoudre efficacement des problèmes de commande considérés comme difficiles, etqu’elle pouvait être appliquée à d’autres types de critères de synthèse (stabilité, critèretemporel). Il ne s’agit là, à notre avis, que d’un échantillon des problèmes de commandepour lesquels le recours à l’optimisation non lisse est pertinent. Nous avons déjà fait réfé-rence au problème H∞ multidisque (voir [9]), dans lequel interviennent plusieurs canauxde performance :
minKstabilisant
max1≤i≤N
‖Twi→zi(K)‖∞ ,
et au problème multibande (voir [10]), encore plus général :
minKstabilisant
max1≤i≤N
maxω∈Ii
σ [Twi→zi(K, jω)] ,
où les Ii sont des intervalles ou des réunions d’intervalles de fréquences. D’autre part, lanorme H∞ permettant de quantifier la robustesse du système vis-à-vis de perturbationsou d’incertitudes, elle peut être considérée en tant que contrainte plutôt que fonctionobjectif. C’est le cas pour le problème de synthèse mixte H2/H∞, pour lequel la normeH2, qui mesure la perfomance nominale du système, est minimisée sous une contrainted’inégalité portant sur la norme H∞ :
minKstabilisant
∥∥∥TwH2→zH2(K)
∥∥∥2
t.q.∥∥∥TwH∞→zH∞ (K)
∥∥∥∞ ≤ γ .
La norme H2 est parfaitement différentiable, cependant l’approche non lisse permet deprendre en compte la contrainte (non lisse) en suivant la démarche algorithmique dePolak décrite dans [114]. Nous renvoyons le lecteur intéressé par ces développements auxtravaux de Apkarian, Noll et Rondepierre [12, 13]. D’autres formes de contraintes nonlisses sont envisageables, telles que le critère temporel présenté au chapitre 5, dont nousavons détaillé le calcul des sous-gradients, et qui pourrait même être étendu sans difficultéaux systèmes non linéaires.
Enfin, les problèmes de synthèse robuste qui se prêtent au formalisme IQC (ContrainteQuadratique Intégrale) peuvent être résolus en considérant une formulation non lisse dansle domaine fréquentiel, donc sans matrice de Lyapunov (voir [7, 119, 118]).

Bibliographie
[1] D. Alazard and P. Apkarian. Exact observer-based structures for arbitrary com-pensators. Int. J. of Robust and Nonlinear Control, 9(2) :101–118, 1999.
[2] D. Alazard, C. Cumer, P. Apkarian, M. Gauvrit, and G. Ferreres. Robustesse etCommande Optimale. Cépaduès, 1999.
[3] B. D. O. Anderson, N. K. Bose, and E. I. Jury. Output feedback stabilizationand related problems — Solution via decision methods. IEEE Transactions onAutomatic Control, 20(1) :53–66, 1975.
[4] B. D. O. Anderson and S. Vongpanitlerd. Network analysis and synthesis : a modernsystems theory approach. Prentice-Hall, 1973.
[5] P. Apkarian, V. Bompart, and D. Noll. Nonsmooth structured control design withapplication to PID loop-shaping of a process. Int. J. of Robust and NonlinearControl, 17(14) :1320–1342, 2007.
[6] P. Apkarian and D. Noll. Controller design via nonsmooth multi-directional search.SIAM Journal on Control and Optimization, 44(6) :1923–1949, 2006.
[7] P. Apkarian and D. Noll. IQC analysis and synthesis via nonsmooth optimization.Systems and Control Letters, 55(12) :971–981, 2006.
[8] P. Apkarian and D. Noll. Nonsmooth H∞ synthesis. IEEE Transactions on Auto-matic Control, 51(1) :71–86, 2006.
[9] P. Apkarian and D. Noll. Nonsmooth optimization for multidisk H∞ synthesis.European Journal of Control, 12(3) :229–244, 2006.
[10] P. Apkarian and D. Noll. Nonsmooth optimization for multiband frequency domaincontrol design. Automatica, 43(4) :724–731, 2007.
[11] P. Apkarian, D. Noll, and O. Prot. Trust region spectral bundle method for non-convex eigenvalue optimization. submitted, 2007.
[12] P. Apkarian, D. Noll, and A. Rondepierre. Mixed H2/H∞ control via nonsmoothoptimization. submitted, 2007.
[13] P. Apkarian, D. Noll, and A. Rondepierre. Nonsmooth optimization algorithmfor mixed H2/H∞ synthesis. In Proc. IEEE Conf. on Decision and Control, NewOrleans, LA, December 2007.
[14] P. Apkarian, D. Noll, J.-B. Thevenet, and H. D. Tuan. A spectral quadratic SDPmethod with applications to fixed-order H2 and H∞ synthesis. European Journalof Control, 10(6) :527–538, 2004.
149

150 Bibliographie
[15] P. Apkarian, D. Noll, and H. D. Tuan. Fixed-order H∞ control design via a par-tially augmented Lagrangian method. Int. J. of Robust and Nonlinear Control,13(12) :1137–1148, 2003.
[16] P. Apkarian and H. D. Tuan. Robust control via concave minimization — Localand global algorithms. IEEE Transactions on Automatic Control, 45(2) :299–305,2000.
[17] V. Balakrishnan and S. Boyd. Global optimization in control system analysis anddesign. In C. T. Leondes, editor, Control and Dynamic Systems : Advances inTheory and Applications, volume 53. Academic Press, New York, 1992.
[18] V. Balakrishnan, S. Boyd, and S. Balemi. Branch and bound algorithm for compu-ting the minimum stability degree of parameter-dependent linear systems. Int. J.of Robust and Nonlinear Control, 1(4) :295–317, 1991.
[19] J. Bao, J. F. Forbes, and P. J. McLellan. Robust multiloop PID controller de-sign : A successive semidefinite programming approach. Ind. & Eng. Chem. Res.,38(9) :3407–3413, 1999.
[20] S. Basu, R. Pollack, and M.-F. Roy. On the combinatorial and algebraic complexityof quantifier elimination. In Proc. 35th Symp. on Foundations of Computer Science,pages 623–641, Santa Fe, NM, November 1994.
[21] M. Bergounioux. Mathématique et automatique : de la boucle ouverte à la bouclefermée. J3eA, 2(HS1), 2003.
[22] D. S. Bernstein. Some open problems in matrix theory arising in linear systems andcontrol. Linear Algebra and its Applications, 162-164 :409–432, 1992.
[23] V. Blondel, M. Gevers, and A. Lindquist. Survey on the state of systems and control.European Journal of Control, 1(1) :5–23, 1995.
[24] V. Blondel and J. Tsitsiklis. NP-hardness of some linear control design problems.SIAM Journal on Control and Optimization, 35(6) :2118–2127, 1997.
[25] V. Bompart, P. Apkarian, and D. Noll. Nonsmooth techniques for stabilizing linearsystems. In Proc. American Control Conf., New York, NY, July 2007.
[26] V. Bompart, D. Noll, and P. Apkarian. Second-order nonsmooth optimization forH∞ synthesis. In Proc. 5th IFAC Symposium on Robust Control Design, Toulouse,France, July 2006.
[27] V. Bompart, D. Noll, and P. Apkarian. Second-order nonsmooth optimization forH∞ synthesis. Numerische Mathematik, 107(3) :433–454, 2007.
[28] S. Boyd and V. Balakrishnan. A regularity result for the singular values of a trans-fer matrix and a quadratically convergent algorithm for computing its L∞-norm.Systems and Control Letters, 15(1) :1–7, 1990.
[29] S. Boyd and C. Barratt. Linear Controller Design : Limits of Performance. Prentice-Hall, 1991.
[30] S. Boyd, L. El Ghaoui, E. Feron, and V. Balakrishnan. Linear Matrix Inequalitiesin System and Control Theory, volume 15 of SIAM Studies in Applied Mathematics.SIAM, Philadelphia, PA, 1994.

151
[31] N. A. Bruinsma and M. Steinbuch. A fast algorithm to compute the H∞-norm of atransfer function matrix. Systems and Control Letters, 14(5) :287–293, 1990.
[32] J. V. Burke, D. Henrion, A. S. Lewis, and M. L. Overton. HIFOO — A MATLABpackage for fixed-order controller design and H∞ optimization. In Proc. 5th IFACSymposium on Robust Control Design, Toulouse, France, July 2006.
[33] J. V. Burke, A. S. Lewis, and M. L. Overton. Optimizing matrix stability. Proc.American Mathematical Society, 129(6) :1635–1642, 2001.
[34] J. V. Burke, A. S. Lewis, and M. L. Overton. Approximating subdifferentials byrandom sampling of gradients. Mathematics of Operations Research, 27(3) :567–584,2002.
[35] J. V. Burke, A. S. Lewis, and M. L. Overton. Two numerical methods for optimizingmatrix stability. Linear Algebra and its Applications, 351-352 :117–145, 2002.
[36] J. V. Burke, A. S. Lewis, and M. L. Overton. A nonsmooth, nonconvex optimizationapproach to robust stabilization by static output feedback and low-order controllers.In Proc. 4th IFAC Symposium on Robust Control Design, volume 5, pages 175–181,Milan, Italy, June 2003.
[37] J. V. Burke, A. S. Lewis, and M. L. Overton. Optimization and pseudospectra, withapplications to robust stability. SIAM Journal on Matrix Analysis and Applications,25(1) :80–104, 2003.
[38] J. V. Burke, A. S. Lewis, and M. L. Overton. Robust stability and a criss-crossalgorithm for pseudospectra. IMA Journal of Numerical Analysis, 23(3) :359–375,2003.
[39] J. V. Burke, A. S. Lewis, and M. L. Overton. A robust gradient sampling algo-rithm for nonsmooth, nonconvex optimization. SIAM Journal on Optimization,15(3) :751–779, 2005.
[40] J. V. Burke and M. L. Overton. Differential properties of the spectral abscissaand the spectral radius for analytic matrix-valued mappings. Nonlinear Analysis :Theory, Methods & Applications, 23(4) :467–488, 1994.
[41] J. V. Burke and M. L. Overton. Variational analysis of non-Lipschitz spectralfunctions. Mathematical Programming, 90(2) :317–351, 2001.
[42] S. U. Cheang and W. J. Chen. Stabilizing control of an inverted pendulum systembased on H∞ loop shaping design procedure. In Proc. 3rd World Congress onIntelligent Control and Automation, volume 5, pages 3385–3388, Hefei, China, June2000.
[43] C. T. Chou and J. M. Maciejowski. System identification using balanced parame-trizations. IEEE Transactions on Automatic Control, 42(7) :956–974, 1997.
[44] F. H. Clarke. Optimization and Nonsmooth Analysis. Canadian Math. Soc. Series.John Wiley & Sons, New York, NY, 1983.
[45] A. Conn, N. Gould, and Ph. Toint. Trust-Region Methods. MPS-SIAM Series onOptimization, Philadelphia, PA, 2000.

152 Bibliographie
[46] E. J. Davison. Benchmark problems for control system design. Technical report,International Federation of Automatic Control, 1990.
[47] J. C. Doyle, K. Glover, P. Khargonekar, and B. A. Francis. State-space solutions tostandard H2 and H∞ control problems. IEEE Transactions on Automatic Control,34(8) :831–847, 1989.
[48] Y. Ebihara, K. Tokuyama, and T. Hagiwara. Structured controller synthesis usingLMI and alternating projection method. Int. J. Control, 77(12) :1137–1147, 2004.
[49] B. Fares, P. Apkarian, and D. Noll. An augmented Lagrangian method for a class ofLMI-constrained problems in robust control. Int. J. Control, 74(4) :348–360, 2001.
[50] B. Fares, D. Noll, and P. Apkarian. Robust control via sequential semidefiniteprogramming. SIAM Journal on Control and Optimization, 40(6) :1791–1820, 2002.
[51] R. Fletcher. Semi-definite matrix constraints in optimization. SIAM Journal onControl and Optimization, 23(4) :493–513, 1985.
[52] M. Fu and Z.-Q. Luo. Computational complexity of a problem arising in fixed orderoutput feedback design. Systems and Control Letters, 30(5) :209–215, 1997.
[53] M. Fujita, K. Hatake, and F. Matsumura. Loop shaping based robust control of amagnetic bearing. IEEE Control Systems Magazine, 13(4) :57–65, 1993.
[54] P. Gahinet and P. Apkarian. Numerical computation of the L∞-norm revisited. InProc. IEEE Conf. on Decision and Control, pages 2257–2258, Tucson, AZ, December1992.
[55] P. Gahinet and P. Apkarian. A linear matrix inequality approach to H∞ control.Int. J. of Robust and Nonlinear Control, 4(4) :421–448, 1994.
[56] D. Gangsaas, K. R. Bruce, J. D. Blight, and U.-L. Ly. Application of modernsynthesis to aircraft control : Three case studies. IEEE Transactions on AutomaticControl, 31(11) :995–1014, 1986.
[57] A. U. Genc. A state-space algorithm for designing H∞ loop shaping PID controllers.Technical report, Cambridge University, Cambridge, UK, 2000.
[58] J. C. Geromel, C. C. de Souza, and R. E. Skelton. Static output feedback controllers :stability and convexity. IEEE Transactions on Automatic Control, 43(1) :120–125,1998.
[59] M. Gevers. A decade of progress in iterative process control design : from theory topractice. J. Process Control, 12(4) :519–531, 2002.
[60] L. El Ghaoui and V. Balakrishnan. Synthesis of fixed-structure controllers vianumerical optimization. In Proc. IEEE Conf. on Decision and Control, pages 2678–2683, Lake Buena Vista, FL, December 1994.
[61] G. Golub and C. Van Loan. Matrix Computations. Johns Hopkins University Press,Baltimore and London, second edition, 1989.
[62] K. M. Grigoriadis and R. E. Skelton. Low-order control design for LMI problemsusing alternating projection methods. Automatica, 32(8) :1117–1125, 1996.

153
[63] W. M. Haddad and D. S. Bernstein. Generalized Riccati equations for the full-and reduced-order mixed-norm H2/H∞ standard problem. In Proc. IEEE Conf. onDecision and Control, pages 397–402, Tampa, FL, December 1989.
[64] J. Han and R. E. Skelton. An LMI optimization approach for structured linearcontrollers. In Proc. IEEE Conf. on Decision and Control, pages 5143–5148, Maui,HI, December 2003.
[65] A. Hassibi, J. How, and S. Boyd. A pathfollowing method for solving BMI problemsin control. In Proc. American Control Conf., pages 1385–1389, San Diego, CA, June1999.
[66] J. W. Helton and O. Merino. Coordinate optimization for bi-convex matrix inequa-litites. In Proc. IEEE Conf. on Decision and Control, pages 3609–3613, San Diego,CA, December 1997.
[67] R. Hettich and K. Kortanek. Semi-infinite programming : theory, methods, andapplications. SIAM Review, 35(3) :380–429, 1993.
[68] J.-B. Hiriart-Urruty and C. Lemaréchal. Convex Analysis and Minimization Algo-rithms I. Springer-Verlag, 1993.
[69] J.-B. Hiriart-Urruty and C. Lemaréchal. Convex Analysis and Minimization Algo-rithms II. Springer-Verlag, 1993.
[70] H. Hjalmarsson. Efficient tuning of linear multivariable controllers using iterativefeedback tuning. Int. J. Adaptive Contr. and Sig. Process., 13(7) :553–572, 1999.
[71] H. Hjalmarsson. Iterative feedback tuning — An overview. Int. J. Adaptive Contr.and Sig. Process., 16(5) :373–395, 2002.
[72] H. Hjalmarsson, M. Gevers, S. Gunnarsson, and O. Lequin. Iterative feedbacktuning : theory and applications. IEEE Control Syst. Mag., 18(4) :26–41, 1998.
[73] H. Hjalmarsson, S. Gunnarsson, and M. Gevers. A convergent iterative restrictedcomplexity control design scheme. In Proc. IEEE Conf. on Decision and Control,pages 1735–1740, Orlando, FL, December 1994.
[74] T. Iwasaki. The dual iteration for fixed-order control. IEEE Transactions on Auto-matic Control, 44(4) :783–788, 1999.
[75] T. Iwasaki and R. E. Skelton. Parametrization of all stabilizing controllers viaquadratic Lyapunov functions. Journal of Optimization Theory and Applications,85(2) :291–307, 1995.
[76] F. Jarre. An interior-point method for minimizing the maximum eigenvalue ofa linear combination of matrices. SIAM Journal on Control and Optimization,31(5) :1360–1377, 1993.
[77] H. Th. Jongen, K. Meer, and E. Triesch. Optimization theory. Kluwer AcademicPublisher, 2004.
[78] L. C. Kammer, F. De Bruyne, and R. R. Bitmead. Iterative feedback tuning viaminimization of the absolute error. In Proc. IEEE Conf. on Decision and Control,pages 4619–4624, Phoenix, AZ, December 1999.

154 Bibliographie
[79] T. Kato. Perturbation theory for linear operators. Springer-Verlag, New York,second edition, 1980.
[80] K. C. Kiwiel. Methods of Descent for Nondifferentiable Optimization, volume 1133of Lecture Notes in Mathematics. Springer-Verlag, 1985.
[81] K. C. Kiwiel. Methods of descent for nondifferentiable optimization. MathematicalProgramming, 46(1-3) :105–122, 1990.
[82] A. J. Laub. Efficient multivariable frequency response computations. IEEE Tran-sactions on Automatic Control, 26(2), 1981.
[83] F. Leibfritz. Computational design of stabilizing static output feedback controllers.Technical Report 99-01, University of Trier, 1999.
[84] F. Leibfritz. COMPleib : COnstrained Matrix-optimization Problem library — Acollection of test examples for nonlinear semidefinite programs, control system de-sign and related problems. Technical report, University of Trier, 2003.
[85] F. Leibfritz and W. Lipinski. Description of the benchmark examples in COMPleib1.0. Technical report, University of Trier, 2003.
[86] F. Leibfritz and E. M. E. Mostafa. An interior-point constrained trust region methodfor a special class of nonlinear semi-definite programming problems. SIAM Journalon Optimization, 12(4) :1048–1074, 2002.
[87] F. Leibfritz and E. M. E. Mostafa. Trust region methods for solving the optimaloutput feedback design problem. Int. J. Control, 76(5) :501–519, 2003.
[88] O. Lequin, M. Gevers, M. Mossberg, E. Bosmans, and L. Triest. Iterative feed-back tuning of PID parameters : comparison with classical tuning rules. ControlEngineering Practice, 11(9) :1023–1033, 2003.
[89] W. S. Levine and M. Athans. On the determination of the optimal constant output-feedback gains for linear multivariable systems. IEEE Transactions on AutomaticControl, 15(1) :44–48, 1970.
[90] X. P. Li and B. C. Chang. A parametrization approach to reduced-orderH∞ control-ler design. In Proc. IEEE Conf. on Decision and Control, pages 2909–2912, SanAntonio, TX, December 1993.
[91] A. G. J. MacFarlane and Y. S. Hung. Analytic properties of the singular value ofa rational matrix. Int. J. Control, 37(2) :221–234, 1983.
[92] M. Mäkelä. Survey of bundle methods for nonsmooth optimization. Optimizationmethods and software, 17(1) :1–29, 2002.
[93] P. M. Mäkilä and H. T. Toivonen. Computational methods for parametric LQminimization — A survey. IEEE Transactions on Automatic Control, 32(8) :658–671, 1987.
[94] M. Mammadov and R. Orsi. H∞ synthesis via a nonsmooth, nonconvex optimizationapproach. Pacific Journal of Optimization, 1(2) :405–420, 2005.
[95] B. Mårtensson. The order of any stabilizing regulator is sufficient a priori informa-tion for adaptive stabilization. Systems and Control Letters, 6(2) :87–91, 1985.

155
[96] The MathWorks. Optimization Toolbox User’s Guide, march 2006. Version 3.[97] D. Q. Mayne and E. Polak. Algorithms for the design of control systems sub-
ject to singular value inequalities. IEEE Transactions on Automatic Control, AC-20(4) :546–548, 1975.
[98] D. McFarlane and K. Glover. A loop shaping design procedure using H∞ synthesis.IEEE Transactions on Automatic Control, 37(6) :759–769, 1992.
[99] E. Mengi and M. L. Overton. Algorithms for the computation of the pseudospectralradius and the numerical radius of a matrix. IMA Journal of Numerical Analysis,25(4) :648–669, 2005.
[100] M. Mesbahi. Fixed-order output feedback synthesis via semidefinite programming.http://www.aa.washington.edu/faculty/mesbahi/papers/ofp.pdf, 2004.
[101] S. Miyamoto and G. Vinnicombe. Robust decentralized control design based oncoprime factorization representations and LMI optimization. In Proc. SICE AnnualConf., pages 1007–1012, Tokushima, Japan, July 1997.
[102] S. G. Nash and A. Sofer. Linear and nonlinear programming. McGraw-Hill, NewYork, 1996.
[103] J. Nocedal and S. Wright. Numerical optimization. Springer-Verlag, New York,1999.
[104] D. Noll and P. Apkarian. Spectral bundle methods for nonconvex maximum ei-genvalue functions : first-order methods. Mathematical Programming Series B,104(2) :701–727, 2005.
[105] D. Noll and P. Apkarian. Spectral bundle methods for nonconvex maximum ei-genvalue functions : second-order methods. Mathematical Programming Series B,104(2) :729–747, 2005.
[106] D. Noll, M. Torki, and P. Apkarian. Partially augmented Lagrangian method formatrix inequality constraints. SIAM Journal on Optimization, 15(1) :161–184, 2004.
[107] R. J. Ober. Balanced parametrizations of classes of linear systems. SIAM Journalon Control and Optimization, 29(6) :1251–1287, 1991.
[108] M. L. Overton. A quadratically convergent method for minimizing a sum of Eucli-dean norms. Mathematical Programming, 27 :34–63, 1983.
[109] M. L. Overton. On minimizing the maximum eigenvalue of a symmetric matrix.SIAM Journal on Matrix Analysis and Applications, 9(2) :256–268, 1988.
[110] M. L. Overton and R. S. Womersley. On minimizing the special radius of a nonsym-metric matrix function : Optimality conditions and duality theory. SIAM Journalon Matrix Analysis and Applications, 9(2) :473–498, 1988.
[111] R. J. Patton. Fault-tolerant control : the 1997 situation. In Proc. IFAC Symp. onFault Detection, Supervision and Safety, pages 1033–1055, Hull, UK, August 1997.
[112] T. Penzl. Algorithms for model reduction of large dynamical systems. Linear Algebraand its Applications, 415(2-3) :322–343, 2006.
[113] E. Polak. On the mathematical foundations of nondifferentiable optimization inengineering design. SIAM Review, 29(1) :21–89, 1987.

156 Bibliographie
[114] E. Polak. Optimization : Algorithms and Consistent Approximations. Applied Ma-thematical Sciences. Springer-Verlag, 1997.
[115] E. Polak, D. Q. Mayne, and J. E. Higgins. On the extension of Newton’s methodto semi-infinite minimax problems. SIAM Journal on Control and Optimization,30(2) :367–389, 1992.
[116] E. Polak and S. Salcudean. On the design of linear multivariable feedback systemsvia constrained nondifferentiable optimization in H∞ spaces. IEEE Transactionson Automatic Control, 34(3) :268–276, 1989.
[117] E. Polak and Y. Wardi. A nondifferentiable optimization algorithm for the designof control systems subject to singular value inequalities over a frequency range.Automatica, 18(3) :267–283, 1982.
[118] O. Prot, P. Apkarian, and D. Noll. A nonsmooth IQC method for robust synthesis.In Proc. IEEE Conf. on Decision and Control, New Orleans, LA, December 2007.
[119] O. Prot, P. Apkarian, and D. Noll. Nonsmooth methods for control design withintegral quadratic constraints. submitted, 2007.
[120] J. Raisch, L. Lang, and M. Groebel. Loop shaping controller design for a binarydistillation column. In Proc. Control’91, volume 2, pages 1271–1276, Edinburgh,UK, March 1991.
[121] R. T. Rockafellar. Convex Analysis. Princeton University Press, Princeton, NJ,1970.
[122] M. Rotkowitz and S. Lall. A characterization of convex problems in decentralizedcontrol. IEEE Transactions on Automatic Control, 51(2) :274–286, 2006.
[123] M. Saeki. Fixed structure PID controller design for standard H∞ control problem.Automatica, 42(1) :93–100, 2006.
[124] M. G. Safonov, K. C. Goh, and J. H. Ly. Control system synthesis via bilinearmatrix inequalities. In Proc. American Control Conf., pages 45–49, Baltimore, MD,June-July 1994.
[125] M. G. Safonov and D. J. N. Limebeer. Simplifying the H∞ theory via loop shif-ting. In Proc. IEEE Conf. on Decision and Control, pages 1399–1404, Austin, TX,December 1988.
[126] C. Scherer. Structured finite-dimensional controller design by convex optimization.Linear Algebra and its Applications, 351-352 :639–669, 2002.
[127] H. Schramm and J. Zowe. A version of the bundle idea for minimizing a nonsmoothfunction : conceptual idea, convergence analysis, numerical results. SIAM Journalon Optimization, 2(1) :121–152, 1992.
[128] A. Shapiro. First and second order analysis of nonlinear semidefinite programs.Mathematical Programming, 77(2) :301–320, 1997.
[129] J. Stoustrup and V. D. Blondel. Fault tolerant control : A simultaneous stabilizationresult. IEEE Transactions on Automatic Control, 49(2) :305–310, 2001.
[130] J. Suykens, K. Vandewalle, and B. De Moor. Intelligence and cooperative searchby coupled local minimizers. International Journal of Bifurcation and Chaos,11(8) :2133–2144, 2001.

157
[131] V. L. Syrmos, C. T. Abdallah, P. Dorato, and K. Grigoriadis. Static output feedback— A survey. Automatica, 33(2) :125–137, 1997.
[132] W. Tan, T. Chen, and H. J. Marquez. Robust controller design and PID tuning formultivariable processes. Asian Journal of Control, 4(4) :439–451, 2002.
[133] J.-B. Thevenet. Techniques d’optimisation avancées pour la synthèse de lois decommande. PhD thesis, Université Toulouse III - Paul Sabatier, Toulouse, France,Décembre 2005.
[134] J.-B. Thevenet, D. Noll, and P. Apkarian. Nonlinear spectral SDP method forBMI-constrained problems : applications to control design. In J. Braz, H. Araújo,A. Vieira, and B. Encarnação, editors, Informatics in Control, Automation andRobotics I, pages 61–72. Springer Verlag, 2006.
[135] O. Toker and H. Özbay. On the NP-hardness of solving bilinear matrix inequali-ties andsimultaneous stabilization with static output feedback. In Proc. AmericanControl Conf., pages 2525–2526, Seattle, WA, June 1995.
[136] V. Torczon. Multi-Directional Search : A Direct Search Algorithm for Parallel ma-chines. PhD thesis, Department of Mathematical Sciences, Rice University, Houston,Texas, May 1989.
[137] V. Torczon. On the convergence of the multidirectional search algorithm. SIAMJournal on Optimization, 1(1) :123–145, 1991.
[138] H. D. Tuan, P. Apkarian, and Y. Nakashima. A new Lagrangian dual global op-timization algorithm for solving bilinear matrix inequalities. Int. J. of Robust andNonlinear Control, 10(7) :561–578, 2000.
[139] T. Wong and P. Bigras. Structured controller design with evolutionary optimization.In Proc. AIA2003, pages 163–168, Benalmádena, Spain, September 2003.
[140] Q Xin, M. V. Salapaka, P. G. Voulgaris., and M. Khammash. Structured optimaland robust control with multiple criteria : a convex solution. IEEE Transactions onAutomatic Control, 49(10) :1623–1640, 2004.
[141] K. Zhou. A new controller architecture for high performance, robust, and fault-tolerant control. IEEE Transactions on Automatic Control, 46(10) :1613–1618, 2001.
[142] K. Zhou. A natural approach to high performance robust control : another lookat Youla parameterization. In Proc. SICE Annual Conf., pages 869–874, Sapporo,Japan, August 2004.
[143] K. Zhou, J. C. Doyle, and K. Glover. Robust and Optimal Control. Prentice-Hall,1995.

RésuméLes techniques modernes de synthèse pour la commande en boucle fermée des systèmes dynamiques
linéaires reposent sur la résolution d’équations matricielles (Lyapunov, Riccati) ou de problèmes d’opti-misation sous contraintes d’inégalités matricielles (LMI, BMI). La mise en œuvre de ces techniques estrendue difficile, voire impossible, par la présence de variables auxiliaires (dites variables de Lyapunov),dont le nombre croît avec le carré de l’ordre du système à commander. En outre, elles sont difficilementexploitables lorsque la loi de commande recherchée est statique ou d’ordre réduit, ou encore lorsqu’unestructure particulière est imposée au correcteur, autant de contraintes pourtant fréquentes dans les ap-plications.
Afin de résoudre efficacement de tels problèmes, la démarche originale adoptée dans cette thèseconsiste à les formuler dans le cadre théorique et général de la programmation non linéaire, non convexe,et plus spécifiquement ici, non lisse. Les problèmes de stabilisation, de synthèse H∞, ou de satisfactionde contraintes temporelles se posent naturellement avec ce formalisme et sont étudiés dans la thèse. Unepremière approche exploitant la description exhaustive du sous-différentiel de Clarke est présentée, puismise en œuvre pour chacun de ces trois problèmes. L’accent est porté sur son efficacité numérique etsa flexibilité, à travers un large choix d’applications en synthèse structurée ou d’ordre fixé. Une secondeapproche, développée spécifiquement pour la synthèse H∞, s’appuie sur une reformulation locale lissedu problème, résolue par programmation quadratique successive (SQP). Sa convergence plus rapide estillustrée sur des problèmes de commande par retour de sortie statique.
Mots-clés: Optimisation non lisse et non convexe, sous-différentiel de Clarke, optimisation semi-infinie,systèmes dynamiques, commande robuste, synthèseH∞, commande structurée, commande d’ordre réduit.
AbstractModern controller design methods for linear dynamical systems are based on solving matrix
equations (Lyapunov, Riccati) or on optimization programs with matrix inequality constraints (LMI,BMI). The execution times of these techniques are often prohibitive, because of auxiliary variables (calledLyapunov variables), whose number grows quadratically with the plant order. Furthermore, they lead toanalytical and computational difficulties when the sought controller is static, reduced-order, or when itis finely structured, although such constraints very often arise in a realistic setting.
In order to solve such challenging problems efficiently, the approach adopted in this thesis consists informulating them in the theoretical and general framework of nonlinear, nonconvex, and more specificallyhere, nonsmooth programming. The problems of closed-loop stabilization, H∞ synthesis, or satisfaction oftime-domain constraints arise naturally in this formalism and are studied in this thesis. Firstly, we proposea nonsmooth descent algorithm which exploits an exhaustive description of the Clarke subdifferential. Itis applied to each of these three fundamental control problems. Its numerical efficiency and versatilityare stressed through a vast array of applications in structured or fixed-order controller synthesis. Asecond approach, specifically developed for H∞ synthesis, is based on a smooth local reformulation of theproblem and solved with the sequential quadratic programming (SQP) algorithm. Its faster convergenceis illustrated with static output feedback control examples.
Keywords: Nonconvex and nonsmooth optimization, Clarke subdifferential, semi-infinite optimization,dynamical systems, robust control, H∞ synthesis, structured controller, reduced-order controller.