Asservissement de niveau -à vanne motorisée_Bouzekri A

of 31
-
Upload
jaouad-diouri -
Category
Documents
-
view
45 -
download
4
Transcript of Asservissement de niveau -à vanne motorisée_Bouzekri A
Asservissement de niveau base dune vanne motorise
Asservissement de niveau vanne motorise
Universit Abdelmalek EssadiFacult de Sciences Ttouan Dpartement de physique 2012/2013Master Mcatronique Ralis par: BOUZEKRI Aicha Encadr par : Pr. DIOURI Jaouad
2012/20132341
IntroductionGnralits sur lasservissement Asservissement du niveau Conclusion Introduction1
Actuellement dans le monde industriel, de nombreux systmes sont en train de remplacer lhomme. mais lautonomie du systme dpendait de lhomme. do la ncessit de crer systme intelligent. systme en boucle ferme
schma de structureGnralits sur lasservissement 2La transmittance de la boucle ferme:
Notons TBF(p) la transmittance de la boucle ferme et exprimons l en fonction de K, C et G.S(p) = (p)C(p)G(p)S(p) = [ E(p)-X(p) ] C(p)G(p)S(p) = [ E(p)-K(p)S(p) ] C(p)G(p)S(p) [ 1+K(p)C(p)G(p) ] = E(p)C(p)G(p)
Gnralits sur lasservissement 2 Un systme est en boucle ouverte lorsqu'on n'a aucune information sur la sortie.
Correction impossible : N'ayant aucune information sur la sortie, l'oprateur ne peut laborer aucune stratgie d'ajustement pour obtenir la sortie dsire. systme en boucle ouverteGnralits sur lasservissement 2
La transmittance de la boucle ouverte :
Si on tient compte de la chane de mesure mais sans branchement au comparateur, on obtient le schma reprsent ci-dessous :
Transmittance de la boucle ouverte, cest la grandeur :
Gnralits sur lasservissement 2CARACTRISATION DES PERFORMANCESPrcision RapiditStabilit La prcision:Ltude de la prcision dun systme asservi a pour objectif dvaluer laptitude de la sortie suivre les variations de la consigne.
Gnralits sur lasservissement 2 La rapidit:
La rapidit est value par le temps de rponse. Celui-ci est dfini comme tant la dure pendant laquelle la rponse volue dun tat stabilis un autre.
Gnralits sur lasservissement 2 La stabilit:
On dit qu'un asservissement est stable si pour une consigne borne en amplitude, tous les autres signaux sont aussi borns en amplitude.
Gnralits sur lasservissement 2
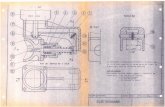
la vanne motoris :Asservissement du niveau dun rservoir 3
Modlisation du systme:Modlisation du rservoir :Asservissement du niveau dun rservoir3
v(t)= (qe(t)-qs(t)).dt dv(t)=qe(t).dt-qs(t).dtS.dh(t)/dt=qe(t)-qs(t)* En appliquant la transform de Laplace S.p.H(p)=Qe(p)-Qs(p) Modlisation du systme:Modlisation du rservoir :Asservissement du niveau dun rservoir3
Gu(p)=H(p)/Qe(p)=1/Sp S.p.H(p)=Qe(p)-Qs(p) Gn(p)=H(p)/Qs(p)= -1/Sp.Modlisation du moteur courant continue: Asservissement du niveau dun rservoir3Modlisation du systme u(t) = e(t)+Ri(t) Cm(t) = J dw(t)/dt u(t)=K w(t) + RJ dw(t)/t U(p)=K(p)+RJ p(p) e(t) = K w(t) K Ki(t) = Cm(t)/KT.L
Cm
Modlisation du systme Description du systme Asservissement du niveau3Description du systme Asservissement du niveau dun rservoir3
Qe=Kv x v avec Kv=0.1m/s.rdS = 0.5 m section du rservoir Qs reprsente le dbit de sortie U=A1x (Vc-Vs) K Avec K=4.78tr/mn.v 1+TP et T=0.1s (cte de temp) Tm =v =m/20Vc = k x Hc Avec k=20v/m Vs = k x H Avec k=20v/m Les potentiomtres Pc et Ps doivent tre identiques Etude du systme Le schma fonctionnel du systme:
Asservissement du niveau dun rservoir3
Le schma-bloc avec les fonctions de transferts: FT de lactionneur {Moteur+Rducteur+Vanne}: Ac(p)=(Tm.Tr.Tv)/p Tm: FT du moteur . Tm=((4.78*2)/60)/(1+0.1p) Tm=0.5/(1+0.1p) Tr: FT de rducteur. Tr=1/20 Tv: FT de la vanne. Tv=0.1 1/p: FT vitesse position angulaire (intgration)Ac(p)=0.0025/p(1+0.1p) FT de la cuve: Tc(p)= 1/SP
Etude du systme Asservissement du niveau dun rservoir3Etude du systme Asservissement du niveau dun rservoir3Le schma-bloc avec les fonctions de transferts:
Etude du systme Asservissement du niveau dun rservoir 3La stabilit du systme :
Etude du systme Asservissement du niveau dun rservoir 3Simulation par MATLAB-SIMULINK:
Etude du systme Asservissement du niveau dun rservoir 3Rsoudre le problme de la stabilit :
Schma de nouvel systmeEtude du systme Asservissement du niveau dun rservoir 3Rsoudre le problme de la stabilit :
Schma fonctionnel de nouvel systme :
La fonction de Transfert du systme:* La fonction de Transfert de lensemble moteur Tm :
Cest un deuxime ordre dont: Le gain statiqueest : G =0.05. Le coefficient damortissementest : = 1/(0.5.A2) La pulsation propre est : wn=1/ (5.A2) = 0.7 A2=10 et wn=7rd/s
La fonction de Transfert du systme: + La fonction de transfert du systme en boucle ouvert Gbo:
+ La fonction de Transfert du systme en boucle fermGbf:
Etude de la stabilit du systme :Critre de ROUTH-HURWITZ :
D(p) = 0.01p + 0.1p + 0.5p + 0.1A1
Les conditions de Routh stipule que 0.1 A1 > 0 et 0.05 0.001 A1 > 0 . 0.1 Pour 0