Adnen Cours TSA
118
5/16/2018 AdnenCoursTSA-slidepdf.com http://slidepdf.com/reader/full/adnen-cours-tsa 1/118 Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003 __________________________________________________________________________________ 2 Facult é des sciences de Tunis Section : Génie Electrique COURS ET EXERCICES DE TRAITEMENT DU SIGNAL ANALOGIQUE Sections: 4 ième année de Maîtrise Electronique 2 ième année de Génie Electrique Par : CHERI F Adnène 2003
-
Upload
nadhem-rusty-abidi -
Category
Documents
-
view
523 -
download
5
Transcript of Adnen Cours TSA

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 1/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
2
Facult é des sciences de Tunis
Sect ion : Génie Elect r ique
COURS ET EXERCICES DETRAITEMENT DU SIGNAL
ANALOGIQUE
Sections: 4ième
année de Maîtrise Electronique
2ième
année de Génie Electrique
Par :
CHERI F Adnène
2003

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 2/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
3
COURS DE TRAITEMENTDU SIGNAL ANALOGIQUE
Table des matières
Introduction
Chap I : Généralités sur les signaux et systèmes
1 - Définitions2 - Classification des signaux.3 - Représentation mathématique d'un signal4 - Opérations sur les signaux ( convolution,filtrage,corrélation...)5 - Systèmes linéaires
6- Analyse temporelle et fréquentielle ( Bode, Nyquist…)
Chap II : Les signaux déterministes
1 - Introduction2 - Développement en série de Fourier des signaux périodiques3 - Transformée de Fourier des signaux non périodiques4 - Transformée de Fourier à court terme
5 - Transformée de Hilbert6 - Convolution et corrélation
7 - Analyse spectrale8 - Synthèse harmonique et reconstitution d'un signal
Chap III : Les signaux aléatoires
1- Description d'un signal aléatoire2- Propriétés statistiques
- Stationnarité- Ergodisme
3-Analyse temporelle des signaux aléatoires4-Analyse spectrale des signaux aléatoires
5- Notion de bruit - bruit blanc - bruit coloré
- rapport signal-bruit .

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 3/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
4
Chap IV : Filtrage linéaire des signaux
1 - Définition d’un F.L.I
2- Notions de causalité, réalisabilité et de stabilité d'un filtre
3- Classification des filtres linéaires invariants4 - Réponses impulsionnelle et harmonique5- Distorsions linéaires et non linéaires6- Exemples de filtres linéaires7- Effets des fenêtres de troncature .
Chap V: Techniques de transmission analogique
1 - Constitution d'un système de transmission2 - Modulation et démodulation analogique
- modulations AM, SSB, DSB
- modulations FM et PM- détection synchrone par PLL
Bibliographie

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 4/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
5
INTRODUCTION
Le signal est le support physique de l'information. Il se trouve sous la forme d'une grandeur
observable de type électrique, mécanique, acoustique ou optique. Cette notion s'oppose à celle
du bruit qui peut modifier l'information ou même la masquer.
La description, la modélisation et l'analyse mathématique des signaux fait l'objet de la
théorie du signal, alors que le traitement des signaux les interprète, en extrait ou y ajoute de
l'information.
Les champs d'application de cette discipline sont très vastes tels que :
- la télécommunication
- l'instrumentation
- les radars et sonar
- le traitement et la reconnaissance de la parole
- le traitement d'image- la reconnaissance de forme
- l'analyse des vibrations dans les machines outils.
- La médecine et la biotechnologie.
Ce cours qui est destiné essentiellement aux étudiants de deuxième année de la maîtrise
Electronique et du cycle d’Ingénieurs est divisé en deux grandes parties représentant les
signaux et les systèmes continus et discrets. Dans les deux premiers chapitres, nous sommes
intéressés à permettre à l'étudiant de maîtriser les outils et les concepts de base de l'analyse
d'un signal (Transformée de Fourier, analyse spectrale, analyse statistique,...) avant d’aborder
les techniques d'analyse des systèmes et le filtrage linéaire.
Le troisième chapitre est consacré à la présentation des signaux aléatoires, de leurs propriétéset de leurs méthodes d’analyse statistique.
Les chapitres quatre et cinq représentent la partie numérique de ce cours et dans la quelle nous
présentons en détails toutes les étapes de numérisation d’un signal ainsi que les conditions de
réalisation de chacune.
Cela permet d'aborder la dernière partie qui est la transmission analogique et
numérique des signaux et dans la quelle on verra les techniques de modulation et de
démodulation AM, SSB, FM, PM, PCM, QPSK ainsi que leurs applications.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 5/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
6
Chapitre 1
GENERALITES SUR LES SIGNAUX
ET SYSTEMES
1- définition d’un signal
Un signal est un support physique de l'information qui représente un phénomène physique qui
peut être du type :
- électrique ( courant, tension, champ électrique ou magnétique )
- mécanique ( vibration )
- optique, etc…
Il peut prendre une représentation scalaire ( signal à la sortie d'un microphone) ou
vectorielle ( champ électrique dans l'espace ).
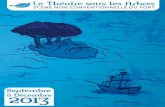
Pour illustrer ce concept, prenons le signal sinusoïdal x(t) de la figure 1 mélangé avec
un bruit d’acquisition b(t).
x(t) = sin(628.t )
b(t) : bruit uniforme.
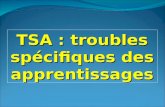
Dans le premier cas ( figure 3 ), nous avons choisi un faible niveau de bruit de façon que celui-
ci ne masque ou ne modifie pas trop le signal original, soit :
y(t) = x(t) + b(t) .
Alors que dans le deuxième cas ( figure 4 ), nous avons choisi un niveau plus élevé du bruit
de façon que celui-ci masque complètement le signal original, soit :
y(t) = x(t) +10 b(t) .
Figure 1: signal sinusoïdal Figure 2 : signal bruit
0 0.01 0.02 0.03 0.04 0.05
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.01 0.02 0.03 0.04 0.050
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 6/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
7
Figure 3: signal faiblement bruité Figure 4 : signal masqué par le bruit
2- Paramètres temporels et énergétiques
Un signal est caractérisé par des paramètres temporels, énergétiques et statistiques qui
caractérisent sa variabilité, sa dynamique, son intensité et sa puissance.
2-1- paramètres temporels:
Ce sont des grandeurs physiques qui peuvent être explicitées par l’observation de la variation
temporelle du signal ou suite à un traitement de ces données, telles que :
- l’amplitude, la période et la phase pour les signaux déterministes
- la valeur moyenne, la variance, la densité de probabilité et la fonction d’autocorrélation
pour les signaux aléatoires.
• Pour un signal discret, la valeur moyenne et la variance ont l’expression :
∑=
= N
i N 1
moy x(i)1
x
2
1
moyX )x-(x(i)1
Var ∑=
= N
i N
• Dans le cas d'un signal continu périodique x(t) = A sin(ω t +ϕ ), on définit :
- la valeur moyenne par : Xm = 1 ∫ T/2
x(t) dt où T désigne la période
-T/2
- la valeur efficace par : Xeff = [ 1 ∫ T/2
|x|2(t) dt ]1/2
-T/2
- la puissance moyenne par: Pmoy = (Xeff )2
- l'amplitude par : A = Xeff . √2- la phase par : ϕ- la période par : T = 2π/ω où ω désige la pulsation
0 0.01 0.02 0.03 0.04 0.05-1.5
-1
-0.5
0
0.5
1
1.5
2signal bruité : x(t)+b(t)
0 0.01 0.02 0.03 0.04 0.05-1
0
1
2
3
4
5
6
7
8
9signal bruité : x(t)+8 b(t)

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 7/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
8
2-2- paramètres énergétiques:
! l’énergie : dans le cas d’un signal apériodique x(t) à énergie finie, l’énergie s’écrit :
Ex =
∫
∞
x(t).x*(t)
dt où x*(t) désigne le conjugué de x(t).
-∞
Si le signal x(t) est réel alors l’expression de l’énergie devient:
Ex = ∫ ∞
| x(t) | 2 dt .
-∞
! la puissance moyenne : elle est définie pour les signaux périodiques comme :
Pmoy =1
T ∫
T/2
|x(t)|2 dt
-T/2
La valeur de Pmoy est toujours nulle dans le cas des signaux à énergie finie.
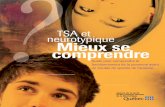
! la distorsion harmonique : elle représente le pourcentage des harmoniques du signal
( généralement indésirables et se manifestent par des pertes énergétiques) par rapport
au fondamental. Pour mieux comprendre ce phénomène, prenons l’exemple d’un
moteur à courant alternatif fonctionnant normalement à 50 Hz, qui alimenté par le
signal suivant :
x(t) = 255 sin(2π .50.t) + 60 sin(2π .100.t) + 25 sin(2π .250.t) .
Seule la première composante x1(t) = 255 sin(2π 50.t) est utile pour le fonctionnement du
moteur. Cependant les deux autres composantes sont indésirables puisqu’elles augmentent les
pertes par effet Joule et par conséquent l’échauffement du moteur. Cela a pour effet de
diminuer le rendement du moteur et même d’endommager ses enroulements.
Dans ce cas , la valeur de la distorsion harmonique est égale à :
σx = =255
25602
22 + ≈ 0.25
Figure 5
0 0.01 0.02 0.03 0.04 0.05-300
-200
-100
0
100
200
300

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 8/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
9
Prenons maintenant, le signal bruit uniforme de la figure 1, d’après le calcul des différentes
valeurs du signal ,on obtient :
! valeur moyenne : bmoy = 0.505
! variance = 0.084
! écart type = 0.29
! énergie = 0.34.
Cependant, pour le signal sinusoïdal de la figure 2, on a :
! valeur moyenne : xmoy = 0
! variance = 0.50
! écart type = 0.7
! énergie = 0.50 .
2-3- exemple:
Soit à calculer la valeur moyenne, la valeur efficace et la puissance moyenne du signal de
la figure suivante :
x(t)
τ/2
0 τ/2 τ Τ t
figure 6
! La valeur moyenne est donnée par :
Xm =1
T ∫
T
x(t) dt =1
T ∫
τ/2
t dt +1
T ∫
τ
(τ - t ) dt =T 4
2τ
0 0 τ/2
! La puissance moyenne est égale à :
Pmoy = 1 ∫ T
x2(t) dt = 1 ∫ τ/2
t2 dt + 1 ∫ τ
(τ - t ) 2 dt =T 12
3τ
0 0 τ/2
! La valeur efficace se déduit de Pmoy comme suit :
Xeff = (Pmoy )1/2 =
T 12
3τ

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 9/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
10
2- Représentation mathématique d’un signal
2-1- décomposition en fonctions orthogonales
Un signal peut se décomposer en une combinaison linéaire de fonctions φ(k) complexes qui
peut se définir à partir d’une base orthogonale [cos(2π f o t) ; sin(2π f o t)], tels que:
e=(t) où(t) .a = )( tf j2
k
-=k
k k
k.π ϕ ϕ ∑∞
∞
t x
Si cette fonction est de dimension unitaire alors le signal est du type scalaire si non on parle de
signal vectoriel.
• Exemple : Prenons le cas du signal suivant : x(t) = cos 2t
sin
e j2 t
cos
Figure 7
Alors, on peut écrire x(t) sous la forme :
x(t) = 2
2.2. t jt j ee−+
ce qui permet correspond aux coordonnées suivants dans la base orthgonale B1= [e j2 t , e
-j2 t ] :
x(t) = (0.5 0.5)B1
2-2- décomposition en somme d’impulsions rectangulaires
On peut approcher x(t) par une fonction en escalier (quantifiée) selon figure suivante :
x(t)
kT t
Figure 8
On peut dans ce cas faire l’approximation suivante :
kT)-(t x(kT) t xk
T ∑∞
−∞=
Π= .)(~
∏Τ(t) est la fonction fenêtre de largeur T.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 10/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
11
3- Classification des signaux
On peut classer les signaux selon les catégories suivantes :
3-1- Classification déterministe-aléatoire :
Un signal déterministe est un signal dont la variation peut étre régie par une
représentation mathématique ou une suite de données ( signal sinusoïdal, carré,...) . Par contre
un signal aléatoire n'est pas modélisable mais il est plutôt caractérisé par ses propriétés
statistiques ( moyenne, variance, loi de probabilité,...).Il peut être approché à des lois pseudo-
aléatoires ( poisson, binomiale,...).
3-2- Classification énergétique :
a- Signaux à énergie finie
Ils sont caractérisés par une énergie finie (constante) et une puissance moyenne nulle.Cette catégorie comprend les signaux non périodiques .
E x = ∫ +∞
x(t)2 dt
-∞
P x = 0
b- Signaux à puissance moyenne finie
Ils sont caractérisés par une énergie infinie et une puissance moyenne constant. Cette
classe comprend les signaux périodiques .
P x = lim1
T ∫
T/2
x(t)2 dt
T →∞ -T/2
E x = ∞
Cette catégorie comprend les signaux périodiques et les signaux aléatoires permanents .
3-3- Classification continu-discret
Un signal discret n'est défini qu'à des instants réguliers dits instants d'échantillonnage.
Malgré que la plupart des signaux rencontrés et mesurés dans la nature sont des signaux
continus, on retrouve souvent ces signaux dans les systèmes numériques.
continudiscret
t
Figure 9

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 11/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
12
4- Opérations sur les signaux
4-1-addition Prenons le cas des deux signaux suivants:
x1(t) = A1 cos (2π f 1 t)
x2(t) = A2 cos (2π f 2 t)
• Si f 1 = f 2 , alors :
x1(t)+ x2(t) = (A1+A2) cos (2π f 1 t).
• Si f 1 ≠ f 2 , alors il faut faire la somme instantanée terme à terme.
4-2- Multiplication
La multiplication de deux signaux revient à une transposition de fréquence.
Prenons le cas des deux signaux suivants :
x1(t) = A1 cos (2π f 1 t)
x2(t) = A2 cos (2π f 2 t)
alors,
y(t) = x1(t) . x2(t) = 0.5 A1 A2 cos [2π (f 1+f 2 )t ] + 0.5 A1 A2 cos [2π (f 1-f 2 )t ].
x1(t) y(t)
x2(t) f 1-f 2 f 1 f 1+f 2 f
Figure 10
Le multiplieur de la figure 10 est très utilisé dans les modulateurs et les démodulateurs AM.
4-3- déphasage
Le déphasage d’un signal conduit à un décalage temporel, en avant ou en retard selon la valeur
de ce déphasage. Si celui-ci est positif alors le signal déphasé est en avance de phase par
rapport au signal original et vice versa. Par exemple, dans le cas des signaux de la figure 6, le
signal y1(t) est en avance de phase puisque le déphasage est positif par contre y2(t) est en retrad phase.
y1(t) = y(t+ ϕ1) avec ϕ1> 0
y2(t) = y(t+ ϕ2) avec ϕ2 < 0
y(t)
y1(t) y2(t)
-ϕ1 0 −ϕ2 t
figure 11

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 12/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
13
4-4- produit scalaire
Le produit scalaire de deux signaux continus à énergies finies est défini par :
<x(t),y(t)> =
∫
∞
x(t).y*(t) dt
-∞
Dans le cas discret, cette expression se ramène à :
<x(n),y(n)> = (n)*x(n).y0
∑∞
=n
Pour les signaux périodiques, le produit scalaire a pour expression :
<x(t),y(t )> =1
T ∫
T
x(t) y*(t) dt .
0 Si ce produit scalaire est nul, alors les deux signaux sont orthogonaux.
• Exemple
Les deux signaux x(t) et y(t) suivants sont orthogonaux.
x(t) = cos t et y(t) = sin t
En effet,
<x(t),y(t )> =1
T
∫
T
cos t. sin t dt avec T=2 π .
0
<x(t),y(t )> =2
1
T ∫
T
sin 2t dt = 0 .
0
5- Les systèmes
5-1- définition
Un système est un opérateur physique fonctionnel H ( fonction, application ) qui à
une entrée e(t) lui associe une sortie s(t).
e(t) s(t)= H[ e(t) ]H
figure 12
5-2- classification des systèmes
Il existe plusieurs types de systèmes qui peuvent être classés selon leur représentation, leurs
réponses, et leurs comportements. Chaque classe de système possède ses propres outils
d’étude, d’analyse et de synthèse. A titre d’exemple, on peut citer:
- les systèmes linéaires, non linéaires- les systèmes mono-variables, multi-variables
- les systèmes continus, échantillonnés (ou discrets),
- les systèmes déterministes, stochastiques.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 13/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
14
5-3- systèmes linéaires
Un système et dit linéaire s'il obéit au théorème de superposition. Ainsi, le système
de la figure 12 est linéaire si :
- pour des entrées e1(t) et e2(t) correspondent les sorties s1= H(e1 ) et s2= H(e2 )alors :
- pour une entrée A e1(t)+B e2(t) correspond une sortie S = A s1(t)+ B s2(t).
D’autre part, un système linéaire est régi soit :
a) par une équation différentielle :
∑∑==
n
j j
m
ii
t st e
0
j
j
0
=
i
i.dt
)(da
dt
)(d b
b) par une fonction de transfert H(p) :
C'est une représentation externe du sytéme qui relie la sortie à l'entrée du sytème et
qui est définit par :
H(p) =S(p)
E(p)=
b p
a
i.
j
i
i
m
j
j
n
p
=
=
∑
∑+
0
1
1
(m ≤ n et p est l'opérateur de Laplace)
D'ailleurs, celle-ci peut être déduite de l'équation différentielle ci-dessus pour desconditions initiales nulles.
5-4- systèmes linéaires invariants
Un système est dit linéaire invariant s'il vérifie les deux propriétés :
- la linéarité
- l'invariance temporelle qui est définit telle que :
si s(t) est la sortie du système pour une entrée e(t)
alors s(t-θ) est la sortie du même système pour l'entrée e(t-θ) .
Donc la variation temporelle de tel système est indépendante de l'origine du temps.
a) Exemple :
Soit le système H qui à toute entrée x(t) lui correspond une sortie y(t) = x(α t) avec |α |<1.
Ce système est linéaire car :
∀ a et b ∈ ℜ ,
H [a x1(t) + b x2(t) ] = a x1(α t) + b x2(α t) = a y1(t) + b y2(t).
Cependant, il n’est pas invariant puisque :
H [ x(t-t 0) ] = x[α( t-t 0)] = x(α t-α t 0) ≠ y(t-t 0) = x(α t- t 0).

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 14/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
15
b- exemples de systèmes linéaires :
- filtres passifs et actifs
- amplificateurs
- opérateurs: sommateur, soustracteur,...
5-5- systèmes non linéaires
Ce sont les systèmes dont la sortie n'est pas linéaire par rapport à l'entrée. Ils ne
possèdent pas une représentation mathématique interne (équation différentielle) non plus
externe ( fonction de transfert) mais on peut définir la sortie de ces systèmes par intervalles.
a) Exemples :
• comparateur logique :
C'est un montage à amplificateur opérationnel dont la sortie est:
y(t) = + Vcc si l'entrée x1(t) ≥ l'entrée x2(t)
y(t) = - Vcc si l'entrée x1(t) < x2(t) .
0
+Vcc
-Vcc
t
s(t)x1(t)
x2(t)
Ro
R
R
( Ro>>R )
+
-
s(t)
Figure 13 : sortie d'un montage comparateur
• relais à hystérisis:
C'est un système non linéaire dont la caractéristique est la suivante:
0−ε ε
Α
Figure 14 : caractéristique d'un relais
• amplificateur à saturation :
C'est un système linéaire dans un intervalle du temps mais il ne l'est pas dans le reste du
temps.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 15/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
16
y(t)
t−ε ε
+Vcc
-Vcc
y(t)=A e(t) si |t| <ε
y(t)= Vcc sign(t) si |t| >ε
Figure 15 : caractéristique d'un amplificateur à saturation
Certains capteurs en instrumentation possèdent de telles caractéristiques, tels que les
capteurs de température, de débit, de pression ou de position. Il convient pour cela de limiter le
fonctionnement dans la zone linéaire.
5-6-Les systèmes discrets
Ce sont des systèmes linéaires ou non linéaires dont la sortie n'est définie qu'à des instants bien
déterminés dits instants d’échantillonnage (figure 16) .
y(k)
k 1 2
Figure 16 : sortie d'un système discret
Un système linéaire discret d'entrée e(k) et de sortie y(k), peut être régi par une
équation récurrente de la forme :
b e(i) a y(j)i. = j
i
m
j
n
= =∑ ∑
0 0
Ce système peut être aussi représenté par une fonction de transfert discrète appelée
aussi transmittance échantillonnée.
5-7-Analyse temporelle d’un système linéaire
L’analyse temporelle d’un système revient à étudier sa réponse temporelle à une entrée
donnée ( impulsion, échelon de position, rampe de vitesse,...) et ses performances statiques et
dynamiques, tels que la précision, la rapidité et la stabilité.
La réponse ou la sortie temporelle du système peut être déterminée à partir de la résolution de
l’équation différentielle de celui-ci ou en utilisant sa fonction de transfert.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 16/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
17
! !! ! Analyse par la résolution de l’équation différentielle
Prenons le cas du circuit passif de la figure 17 et déterminons l’expression de sa sortie
s(t) pour une entrée indicielle : e(t) = A Γ (t) ( échelon de position A ) :
R
e(t) C s(t)
figure 17
La loi des mailles permet d’écrire :
RC s’(t) + s(t) = e(t)= A. Γ (t) ,
La solution de cette équation différentielle est la somme de la solution générale sans second
membre et la solution particulière avec second membre :
soit :
s(t) = A . K e- t/RC
+ A. Γ (t) avec K= -Γ (t) si on prend s(0)=0
Il vient alors : s(t) = A (1 - e- t/RC
) Γ (t) .
! !! ! Analyse par la fonction de transfert
Le circuit précédent peut être considéré comme un diviseur de tension, alors la fonction de
transfert du circuit s’écrit :
1
1 )(
)( )(
ω ω ω ω
j RC j E
jS j H
+==
où ω est la pulsation . En introduisant l’opérateur de Laplace de Laplace ( p=jω ) et en
remplaçant l’entrée E(p)=A/p , il vient :
) p RC ( p
A) p(S
+
=1
soit :
s(t) = A ( 1 - e- t/RC
) Γ (t) .
Ce qui donne la représentation graphique suivante :
s(t)
figure 18 t
A

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 17/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
18
! !! ! Performances statiques et dynamiques
a) - précision : Elle définit l’écart entre l’entrée désirée et la sortie
ε (t) = e(t) - s(t)
La précision statique est la valeur de l’erreur en régime permanent soit :
ε ∞ = lim ε (t) = e∞ - s∞ . t → ∞
b) stabilté : un système est mathématiquement stable si à toute entrée bornée lui
correspond une sortie bornée. Cela implique que tous les pôles de la fonction de transfert sont
à parties réelles négatives. De point de vue physique, la stabilité définit l’aptitude d’un
système à revenir à sa position d’équilibre après une perturbation.
c) rapidité : c’est l’aptitude du système à réagir rapidement à une entrée quelconque et
de vaincre son inertie. Elle est donnée par la valeur de la constante de temps la plus lente du
système.
• Exemple :
Prenons le système de la figure 17 :
! L'erreur statique est nulle car : ε ∞ = e∞ - s∞ = A -A = 0.
! Le système est stable car le pôle est négatif po = -1/RC .
! Le système possède une constante de temps τ = RC et la rapidité dépend dans ce cas de
la valeur de RC .
5-8- Analyse fréquentielle
La réponse fréquentielle a pour but de déterminer le comportement et la variation fréquentielle
de certains paramètres et performances du système. Pour cela, il suffit d’étudier la variation de
la fonction de transfert H , généralement complexe, en fonction de la fréquence. Pour avoir une
meilleure représentation et exploitation de H , celle-ci est souvent donnée par le gain (modulede H ) et le déphasage (argument de H ) appelés diagrammes de Bode.
a) calcul du gain et du déphasage ( diagrammes de Bode )
Prenons le cas général où :
n)(m
)(
)(
)(
1
1 <−
−=
∏
∏
=
=n
j
j
m
i
i
p p
z p
p H
où : z i : est le iième zéro de H(p)
p k est le k ième pôle de H(p).
Alors, on définit:

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 18/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
19
• le gain par : G(ω ) = 20 log10(| H( jω )| )
• le déphasage par : Φ(ω) = Arg( H( jω ) ) . .
5-9- systèmes élémentaires
5-9-1- système du premier ordre
On se donne la fonction de transfert H(p) d'un système du premier ordre ayant un gain statique
k et une constante de temps τ.
1
)( p
k p H
τ +=
Les expressions du gain et du déphasage sont donnés par :
- gain : G(w) = 20 log10(| H( jω )| ) = 20 log k - 10 log(1+τ 2ω 2)
- déphasage : φ(ω) = - arctg (τω )
* diagrammes de Bode
La courbe du gain G(ω) présente deux asymptotes G1 et G2 respectivement en basses et hautes
fréquences données par :
quand ω → 0 : G1 = 20 log k
quand ω → ∞ : G2 = 20 log k -20 log τω .
De même la courbe de phase possède deux asymptotes φ 1 et φ 2 .
quand ω → 0 : φ 1 = 0
quand ω → ∞ : φ 2 = - π/2 .
A la pulsation de coupure ( ωc=1/τ ), le gain et la phase sont égales à :
Gc = 20 log k - 20 log 2 = 20 log k - 3 et φ c = -π/4 .
G(ω ) φ(ω)
20 log k
Figure 19
-π/2
c
ωc=1/τ
Log w

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 19/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
20
5-9-2- système du second ordre
Supposons la fonction de transfert d'un système du second ordre est la suivante :
p2+ p )(
2nn
2
2n
ω ω ξ ω
+= k p H
où :
k : est le gain statique du système,
ξ : est l’amortissement,
ωn : est la pulsation propre.
L’équation caractéristique du système s’écrit :
p2 + 2ξ nω p + nω 2 = 0 .
Le déterminant de celle-ci est :
∆ = 4 (ξ 2 − 1) nω 2
• si ∆ = 0 ( ξ=1), alors l’équation caractéristique possède une racine double po , telle que :
po = - ξ nω
• si ∆ > 0 ( ξ>1), l’équation caractéristique possède deux racines réelles distinctes p1 et p2 :
1-2
1 ξ ξξ ξ ω ωω ω ω ωω ω ξ ξξ ξ n n p ++++−−−−==== 1-2
2 ξ ξξ ξ ω ωω ω ω ωω ω ξ ξξ ξ n n p −−−−−−−−====
• si ∆ <0 ( ξ<1), l’équation caractéristique possède deux racines complexes conjuguées p3
et p4, telles que :
2
3 1 ξ ξξ ξ ω ωω ω ω ωω ω ξ ξξ ξ −−−−++++−−−−==== n n j p
2
4 1 ξ ξξ ξ ω ωω ω ω ωω ω ξ ξξ ξ −−−−−−−−−−−−==== n n j p
a) réponse indicielle :
) p2+ p(p
)(
2nn
2
2n
ω ω ξ ω
+==
k E(p) H(p) pS ,
• si ∆ = 0 ( ξ = 1 ), le régime est dit amorti ou amorti et la réponse s’écrit :
[ ]t)1(e1)( nω ω +−= t nk t s
• si ∆ > 0 ( ξ > 1 ), le régime est dit hyper-amorti et la réponse s’écrit :
[ ])e pe(p1-2
11()( 21
122
t pt pk t s −−=
ξ

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 20/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
21
• si ∆ < 0 ( ξ < 1 ), alors le régime devient oscillant la réponse s’écrit :
[ ])tsin(e 1
11)( o
2
ϕ ω ξ
ω ξ +−
−= − t nk t s
avec :
.cosArcet1 2
0 ξ ϕ ξ ω ω =−= n
Figure 20 : réponse indicielle selon les 3 régimes d’un système du second ordre
On remarque bien que le système possède trois régimes de fonctionnement qui
dépendent de l’amortissement. Cependant, l’apparition du dépassement ne peut être visible
que pour la valeur ξ=0.7. Cette valeur physique de l’amortissement sera par la suite remplacée
par la valeur mathématique ξ=1, qui limite les trois régimes hyper-amorti, amorti et oscillant.
b) réponse impulsionnelle :
p2+ p
)(
2nn
2
2n
ω ω ξ ω
+==
k E(p) H(p) pS ,
• si ∆ = 0 ( ξ = 1 ), le régime est dit amorti ou amorti et la réponse s’écrit :
t o pn
k t s et)(2ω =
• si ∆ > 0 ( ξ > 1 ), le régime est dit apériodique ou amorti et la réponse s’écrit :
)ee(1-2
)( 21
2
2t pt pnk t s −=
ξ
ω
• si ∆ < 0 ( ξ < 1 ), alors le régime devient oscillant la réponse s’écrit :
]t)sin(e 1
)( o2
ω ξ
ω ω ξ t nnk t s−
−=
avec :
ξ < 1
ξ > 1

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 21/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
22
. 1 2
0 ξ ω ω −= n
On remarque que, quelque soit le régime de fonctionnement, la réponse impulsionnelle tend
asymptotiquement vers zéro, ce qui montre que le système est stable. D’autre part, on sait que
le système est d’autant plus rapide qu’il atteigne le plus vite le régime permanent, ce qui
correspond selon la figure à un amortissement unitaire.
Figure 21 : réponse impulsionnelle selon les 3 régimes d’un système du second ordre
c) Réponse fréquencielle :
j2)-(
)(
n22
n
2n
ω ω ξ ω ω ω
ω +
=k
j H
! gain : G(w) = 20 log(k ω n2) - 10 log [(ω n2
-ω 2 )2
+4ξ 2ω n2ω 2]
! déphasage : φ(ω) = - arctg [ 2ξω nω / (ω n2-ω 2) ] .
* diagrammes de Bode
La courbe du gain G(ω) présente deux asymptotes G1 et G2 respectivement en basses et hautes
fréquences données par :
quand ω → 0 : G1 = 20 log k
quand ω → ∞ : G2 = 20 log k - 40 log (ω/ωn) , soit une pente de -40 dB/décade
De même la courbe de phase possède deux asymptotes φ 1 et φ 2 .
quand ω → 0 : φ 1 = 0 quand ω → ∞ : φ 2 = - π .
A la pulsation de coupure ( ωc= ωn ), le gain et la phase sont égales à :
ξ < 1

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 22/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
23
Gc = 20 log k - 3 et φ c = -π/2 .
Figure 22 : courbe du gain selon les 3 régimes d’un système du second ordre
Figure 23 : courbe de phase selon les 3 régimes d’un système du second ordre.
5-9-3- système d’ordre supérieur à deux
Dans ce cas le système peut se décomposer en systèmes élémentaires de premier et de second
ordre. Le gain et le déphasage sont respectivement égaux à la somme des gains et des
déphasages des systèmes élémentaires.
• Exemple :
ξ<1
ξ > 1
ξ=
ξ > 1

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 23/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
24
Prenons le système suivant et déterminons sa réponse fréquentielle .
1)2)(pp(
5)p(4 )(
2 ++++++++++++++++
==== p
p H
Ce système peut se décomposer en trois système élémentaires de la façon suivante :
1p
1
2p
4 )5( )(
2 ++++++++++++++++====
p p p H
1p
1 .
p0.51
1 2.)2.01(5 )(
2 ++++++++++++++++====
p p p H
soit encore :1p
1
p0.51
1 )2.01(10 )(
2 ++++++++++++++++====
p p p H
• Gain : G(w) = G1(w) + G2(w)+ G3(w) ,
G(w) = 20 log10 + 20 log(1+0.04ω 2) - 20 log(1+0.25ω 2) - 20 log [(1 -ω 2 )
2+ ω 2]
• Déphasage : φ(ω) = arctg (0.2ω ) - arctg (0.5ω ) - arctg [ ω / (1 -ω 2) ]
Le tracé du lieu asymptotique du gain des 3 systèmes est le suivant :
+20 dB/dec
20 log10
1 2 5 log w
-20dB/dec
-40 dB/dec
figure 24.
Le tableau suivant résume les variations des courbes du gain et de déphasage :

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 24/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
25
w -∞ 1 2 5 + ∞G1(w) en dB/dec 0 0 0 +20
G2(w) 0 0 -20 -20
G3(w) 0 -40 -40 -40
G(w)=G1+G2+G3 0 -40 -60 -40
déphasage -∞ 1 2 5 + ∞φ 1(w) en rad 0 0 0 +π/2
φ 2(w) 0 0 -π/2 -π/2
φ 3(w) 0 -π -π -πφ (w)= φ 1+φ 2+φ 3 0 -π -3π/2 -π
Table 1
Ainsi, le tracé global devient:
G(w) 20
-40 dB/dec
1 2 5 log w
-60 dB/dec
-40dB/dec
figure 25
De même, on procède pour la courbe de déphasage :
Φ (w)
1 2 5 log w
-π
-3π/2
figure 26.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 25/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
26
EXERCICES CORRIGES DUCHAPITRE 1
♦♦♦♦ Enoncé de l'exercice 1
a) Calculer la valeur moyenne, la valeur efficace et la puissance moyenne d’un signal
sinusoïdal redressé en simple alternance.
b) Même question pour un signal double alternance.
♦♦♦♦Corrigé de l'exercice 1
1-a) Le signal simple alternance est exprimé sur une période [-T o/2 , T o/2] par :
x(t) = U o cos ( 2π f o t) pour | t | < T o/4 ,
x(t) = 0 pour T o/4 < | t | < T o/2 .
0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 1 2 0 0
t (m s )0
0. 2
0. 4
0. 6
0. 8
1
. x (t )
figure 27 : signal redressé en double alternance
• Sa valeur moyenne est donnée par la relation :
π π π 0
4/
0
0
0
4/
4/
0
0
2/
2/0
U )2cos(U
2 )2cos(U
1 )(
1 ∫ ∫ ∫ ====
−−
To
o
To
To
o
To
To
dt t F T
dt t F T
dt t xT
X moy
soit :
X moy = U o / π .
• La puissance moyenne est donnée par :
[ ]4
U )4cos(1
2
1
2U )2(cosU
2 )(
1
2
0
4/
00
2
0
4/
0
22
0
0
2/
2/
2
0∫ ∫ ∫ =+===
−
To
o
To
o
To
To
dt t F T
dt t F T
dt t xT
Pmoy π π
donc :
Pmoy = U o2/ 4 .

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 26/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
27
• La valeur efficace se déduit de la puissance ainsi :
2
U
4
U
0
2
0
=== moyeff P X .
b) Le signal simple alternance est exprimé par la relation :
x(t) = U o cos ( 2π f o t) ∀ t ∈ ℜ
• La valeur moyenne est égale à :
π π 0
4/
0
0
0
2/
2/0
2U )2cos(U
4 )(
1 ∫ ∫ ===
−
To
o
To
To
dt t F T
dt t xT
X moy
soit :
X moy = 2U o / π .
• La puissance moyenne est donnée par :
[ ]2
U )4cos(1
2
1
4U )2(cosU
2 )(
1
2
0
4/
00
2
0
2/
0
22
0
0
2/
2/
2
0∫ ∫ ∫ =+===
−
To
o
To
o
To
To
dt t F T
dt t F T
dt t xT
Pmoy π π
donc :
Pmoy = U o2/ 2 .
• La valeur efficace se déduit de la puissance ainsi :
2
U
2
U 0
2
0 === moyeff P X .
♦♦♦♦ Enoncé de l'exercice 2
Le synoptique de la figure 28 représente le principe de réalisation d’un modulateur
d’amplitude utilisé dans la transmission des signaux radioélectriques.
x1=A1 cos(2π f 1 t) x1(t).x2(t)
x2=A2 cos(2π f 2 t) y(t)
figure 28
a) Donner l’expression du signal de sortie y(t) . On supposera f 2 >> f 1b) En déduire la valeur de la puissance moyenne du signal.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 27/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
28
♦♦♦♦ Corrigé de l'exercice 2
x1(t) = A1 cos (2πf 1 t)
x2(t) = A2 cos (2πf 2 t)
alors : y(t) = x1(t) x2(t) + x2(t) ,
y(t)= 0.5 A1 A2 cos [2π (f 1+f 2 )t ]+0.5A1 A2 cos [2π (f 2-f 1 )t ]+A2 cos[2π f 2 t ].
Donc le signal y(t) est composé de trois signaux dont les composantes fréquentielles sont
données par :
A2
0.5 A1 A2 0.5 A1 A2
f 2-f 1 f 2 f 1+f 2 f
Figure 29.
La puissance moyenne du signal y(t) est égale à :
Pmoy = (0.5 A1 A2 )2
+ A22
+ (0.5 A1 A2 )2 = A1
2A2
2 + A22 = A2
2 ( 1+ A12)
♦♦♦♦ Enoncé de l'exercice 3
Montrer que si les signaux x(t) et y(t) sont orthogonaux.
x(t) y(t)
1 1
t t
T T/2 T -1
Figure 30.
♦♦♦♦Corrigé de l'exercice 3
<x(t),y(t )> = 1 ∫ T/2
dt - 1 ∫
T dt .
0 T/2
= T/2 - T/2 = 0 .
Comme le produit scalaire des signaux x(t) et y(t) est nul alors ils sont orthogonaux.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 28/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
29
♦♦♦♦ Enoncé de l'exercice 4
a) Calculer et représenter la réponse impulsionnelle d’un système dont la fonction de
transfert est donnée par l’expression :
p b1
1)(
++
= pa
p H , a et b ∈ ℜ .
b) Calculer et représenter les réponses fréquentielles ( gain et déphasage ) du système.
On discutera selon les valeurs a et b. En déduire le type du système.
♦♦♦♦ Corrigé de l'exercice 4
Nous retenons dans ce qui suit les cas où b>0 qui correspondent à un système stable. Les
réponses impulsionnelles et indicielles sont données par les figures ci-dessous:
0 1 2 3 4 5 6 7 8 9 10-0.8
-0.6
-0.4
-0.2
0reponse impulsionnelle
0 1 2 3 4 5 6 7 8 9 101
1.5
2
2.5reponse indicielle
0 1 2 3 4 5 6 7 8 9 100
0.05
0.1
0.15
0.2
0.25reponse impulsionnelle
0 1 2 3 4 5 6 7 8 9 100.5
0.6
0.7
0.8
0.9
1reponse indicielle
Figure 31.
Cas : 0<b<a
b=2 et a=5
Cas 0<a<b
b=2 et a=1

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 29/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
30
les courbes du gain et de déphasage sont :
* cas 0 < b < a ( a=15;b=2)
10-2
10-1
100
101
100
101 gain en dB
10-2
10-1
100
101
0
10
20
30
40
50dé phasage
* cas 0 < a < b ( a=0.1 ;b=2 )
10-1
100
101
102
10-2
10-1
100 gain en dB
10-1
100
101
102
-80
-60
-40
-20
0dé phasage
Figure 32.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 30/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
31
♦♦♦♦ Enoncé de l'exercice 5
Calculer et représenter la réponse fréquentielle ( gain et déphasage ) du système dont la
fonction de transfert est donnée par :
p)2p)(1 p(10.51)(
++−= p p H .
♦♦♦♦ Corrigé de l'exercice 5
)().().().( 1
1 . p21
1 p1 .)5.01( )( 4321 p H p H p H p H
p p p H =
++−=
w -∞ 0 0.5 1 2 + ∞G1(w) en dB/dec 0 0 0 0 +20
G2(w) -20 -20 -20 -20 -20G3(w) 0 0 -20 -20 -20
G4(w) 0 0 0 -20 -20
G(w)=G1+G2+G3
+G4
-20 -20 -40 -60 -40
déphasage -∞ 0 0.5 1 2 + ∞φ 1(w) en rad 0 0 0 0 -π/2
φ 2(w) -π/2 -π/2 -π/2 -π/2 -π/2
φ 3(w) 0 0 -π/2 -π/2 -π/2
φ 4(w) 0 0 0 -π/2 -π/2φ (w)= φ 1+φ 2+φ 3
+φ 4-π/2 -π/2 -π -3π/2 -2π
Table 2.
10-2
10-1
100
101
10-4
10-2
100
102
gain en dB
10-2
10-1
100
101-400
-300
-200
-100
0dé phasage
Figure 33.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 31/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
32
Chapitre II
LES SIGNAUX DETERMINISTES
1- Définition
Un signal est dit déterministe s’il peut être donné par une expression ou une représentation
mathématique. Physiquement cela signifie que ses événements sont tout à fait prévivisibles et
connus. Ses paramètres temporels et énergétiques tels qu’ils sont définis au chapitre précédent
peuvent être aussi explicités ou calculés. De plus, un signal déterministe peut être continu ou
discret, périodique ou apériodique, à énergie finie ou infinie.
A titre d’exemple un signal sinusoïdal, carré, échelon, peigne de Dirac sont des signaux
déterministes. Par contre un bruit ou un signal dont une ou plusieurs variables suivent une loi
statistique est un signal aléatoire dont le comportement et les événements sont imprévisibles.
Par exemple, le signal parole mesuré à la sortie d’un microphone est sensiblement bruité et ne possède pas une expression mathématique bien déterminée.
Dans ce chapitre, nous allons voir en détail les méthodes d’analyse et de synthèse des signaux
déterministes ainsi que les outils de traitement utilisés que ce soit dans le domaine temporel ou
fréquentiel.
0 200 400 600 800 10000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Figure 1 : signal aléatoire

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 32/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
33
2) Décomposition en série de Fourier des signaux périodiques
Nous avons vu dans le dernier chapitre que le signaux peuvent être représentés en série de
fonctions orthogonales ou en série d'impulsions rectangulaires décalées. L'introduction de la
transformée et de la série de Fourier permet de donner une autre représentation des signaux
très intéressante pour la théorie de l'information et du signal que ce soit pour les signaux àénergie finie ou à puissance moyenne finie. Cette décomposition exponentielle ou
trigonométrique découle de la représentation du signal dans la base orthogonale
trigonométrique. Elle permet aussi d’exprimer le signal en fonctions de ses harmoniques.
2-1- recherche d’une base orthogonale normée
La décomposition des signaux dans une base orthogonale orthonormée a pour but de trouver
un cadre de référence dans lequel plusieurs signaux peuvent être manipulés et comparés.
Pour cela, si on considère l’espace vectoriel Sdes signaux muni de l’opérateur linéaire produit
scalaire, alors l’ensemble des fonctions exponentielles ( e j2π n t / T , n > 0 ) forme une base de Sappelée base de Fourier exponentielle
D’autre part, on peut retrouver une autre base orthogonale de S qui d’ailleurs découle de la
première constituée par l’ensemble des fonctions sinusoïdales (cos(2π nt /T ,sin(2π nt /T), n>0)
et qui est appelée base de Fourier trigonométrique.
2-2- Décomposition sous une forme exponentielle
Un signal périodique x(t) de période T , continu par morceaux et vérifiant les conditions
de DIRICHLET (c.a.d x(t) est continue, intégrable et son intégrale ∫ x(t)dt est bornée ) peut
être décomposé en série de Fourier selon la forme exponentielle suivante :
t T
n2 j
n
-n
eC x(t)
π +∞
∞=∑=
où
dt e x(t) T
1 C
t T
n2 j
T/2
T/2
n
π −
−∫ = .
L'ensemble des C n représente le spectre de fréquence, généralement complexe. Celui-ci
est caractérisé par :
- le spectre d'amplitude C n - le spectre de phase Φn = Arg (C n) .
2-3- Décomposition sous une forme trigonométrique
De même, un signal périodique x(t) vérifiant les conditions de Dirichlet, peut être décomposé
dans la base trigonométrique de la manière suivante :
])t T
n2sin(b + )t
T
n2cos(a[+
2
a = x(t)
n
nno ∑
∞
=1
π π
avec :
a0 /2 : la valeur moyenne de x(t).
et :

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 33/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
34
dt t T
n2osc x(t)
T
2 a
T/2
T/2
n )(π
∫ −
=
dt t
T
n2 x(t)
T
2 b
T/2
T/2
n )sin(π
∫ −
=
On remarque que les deux représentations trigonométrique et exponentielle sont équivalentes
puisqu’on peut écrire :
)( nnn b ja2
1 C −=
22nnn ba
2
1 C +=
an = 2 Re(C n) et bn = - 2 Im(C n) .
En définitif, la décomposition d’un signal périodique sous une forme exponentielle ou
trigonométrique est unique et donne lieu à spectre complexe discontinu.
a) cas particuliers :
! si le signal x(t) est pair, alors bn = 0 ∀ n ∈ N*
! si le signal x(t) est impair alors an = 0 ∀ n ∈ N ( ao = 0 ) .
b) Exemples :
Soit un signal carré périodique de période T o et d'amplitude α .
x(t)
α
−α
To
t
Figure 3
• x(t) est impair ⇒ an = 0 ∀ n ∈ N
bn = 2.T o
2 . ∫ T0/2
α .sin(n.2π .t / T o ) dt = −2 α π n.
. [ cos (n.π ) - 1 ]
0
• si n est pair, alors : bn = 0 .
• si n est impair alors: bn
n =.4 α π .
.
Donc en utilisant la décomposition en série de Fourier, le signal peut s’écrire :

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 34/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
35
.]t f 1)2sin[(2nn
= (t) x 0
1=n
π π
α +
+∑∞
)12(
4
Son spectre d’amplitude (bn) est donnée par la figure ci-dessous :
0 1 3 5 7
bn
n
Figure 4
! Prenons maintenant le signal double alternance, périodique de période To/2 :
x(t) = U o cos ( 2π f o.t) où f 0=1/T 0
t
x(t)
Uo
0 To
Figure 5
Le signal est pair, alors sa décomposition trigonométrique donne :
bk = 0 ,
ao = 2 U o / π ,
si k est impair ⇒ ak = 0 ,
si k est pair (k=2n) ⇒ a U n
n = . .o− −4
4 12π ( )
0 2 4 6 8 n
an
Figure 6
Donc en utilisant la décomposition en série de Fourier, le signal peut s’écrire :
°
an
(-1)n
a
0 1 3 5 7 9
0 2 4 6 8

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 35/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
36
.]t f 1)2cos[(2nn
U . +
U 2 = (t) x 0
o
=1n
oπ
π π +
−−∑
∞
)14(
42
2-4- propriétés de la série de Fourier
a) Linéarité
Appelons C le spectre complexe d’un signal. Si les signaux x1(t) et x2(t) possèdent des
spectres C 1 et C 2, alors le spectre du signal y(t) est :
C [ (y(t) ] = C [α x1(t) + β x2(t) ] = α C [x1(t)] + β C [x2(t)] ( α et β ∈ ℜ )
soit : C [ (y(t) ] ) = α C 1 + β C 2
b) Translation temporelle
Le retard temporel d’un signal x(t) de période T , se traduit par une rotation fréquentielle de son
spectre C .
C n[ x(t-t o) ] = e -j2π nt o /T . C n[ x(t) ]
En effet,
00 ) t T
n2 jt
T
n2 j
n
-n
t t (T
n2 j
n
-n
0 eeC eC )t - x(t
π π π −+∞
∞=
−+∞
∞=∑∑ ==
donc :
0t T
n2 j
n0n e .[x(t)]C )]t -[x(t C π −=
c) Symétrie hermitienne
Pour les signaux périodiques et réels, on peut montrer que :
C n = C -n* ∀ n ∈ Z
où (*) désigne le conjugué.
Cette propriété montre que le spectre d’amplitude | C n | est toujours pair .
En effet, si x(t) est réel alors :
.*] *C dt e[x(t) T
1 dt e x(t)
T
1 C n
t T
n2 j
T/2
T/2
t T
n2 j
T/2
T/2
n- ===−
−
+
−∫ ∫
π π
d) Dérivation
nk
k
k
.T
n j2
( ]dt
xd
[ C C ))(
π =
On peut montrer cette propriété en partant de l’expression suivante :
(-1)n cos(4nπ f o t)

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 36/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
37
t T
n2 j
n
-n
eC x(t)
π +∞
∞=∑=
,T
n j2(eC dt
t xd k
t
T
n2 j
n
-nk
k
))(
)( π
π +∞
∞=∑=
donc :
nk
k
k
.T
n j2( ]
dt
xd [ C C n )
)(
π =
3- Transformée de Fourier
La série de Fourier fournit un premier outil pour la représentation de certains types de signaux
et l’étude de leurs caractéristiques fréquentiels. Cependant, elle ne permet pas de représenter
ou d’étudier les signaux non périodiques.Dans ce cas, on peut en première étape définir une nouvelle base orthonormée en utilisant la
même démarche que celle adoptée pour les signaux périodiques.
Pour cela, si on considère l’espace vectoriel S des signaux non périodiques muni de
l’opérateur linéaire produit scalaire, alors l’ensemble des fonctions exponentielles (ej2π f t
,
f ∈ℜ ) forme une base orthonormée de S.
3-1- Définition
Pour un signal apériodique x(t) à énergie finie, défini sur ℜ , continu et dont l'integrale est
bornée, on peut associer une transformation linéaire appelée Transformée de Fourier X(f) telleque :
F : ℜ → C
x(t) → F [x(t)] = X(f)
avec :
dt e x(t) X(f) t f 2 j
π −∞
∞−∫ = .
Cette transformée est inversible etla transformée inverse est donnée par :
df e X(f) x(t) t f 2 j
π +∞
∞−∫ = .
Le spectre complexe X(f) est aussi représenté par le spectre d'amplitude X(f)et le
spectre de phase φ (f).
Remarque :
D’après l’expression du spectre X(f), celui-ci est défini pour toute la plage des fréquences
négatives et positives. Or on sait que la fréquence n'a qu'un sens physique positif, cela
s'explique par le fait qu'un signal réel peut être obtenu à partir de deux termes complexesconjugués.
3-2-Cas particuliers

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 37/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
38
! si le signal x(t) est pair alors :
dt t f cos(2 x(t) X(f)
∫ ∞
∞−
= )2 π
! si le signal x(t) est impair alors :
dt t f sin(2 x(t) j X(f)
∫ ∞
∞−−= )2 π .
! si le signal x(t) est réel est pair alors sa transformée de Fourier X(f) est réelle et paire.
! si le signal x(t) est réel est impair alors sa transformée de Fourier X(f) est imaginaire
pure et paire.
! si le signal x(t) est imaginaire et pair alors sa transformée de Fourier X(f) est est
imaginaire et paire.
! si le signal x(t) est imaginaire et impair alors sa transformée de Fourier X(f) est est
réelle et impaire.
! si le signal x(t) est réel quelconque (ni pair ni impair) alors sa transformée de Fourier
X(f) est à partie réelle paire et à partie imaginaire impaire.
Le tableau suivant résume les différents cas particuliers cités ci dessus .
x(t) X(f)
réelle et paire
réelle et impaire
imaginaire et paire
imaginaire et impaire
réelle quelconque
complexe paire
complexe impaire
réelle et paire
imaginaire et impaire
imaginaire et paire
réelle et impaire
partie réelle paire et impaire
complexe et paire
complexe et impaire
Table 1
3-3- Exemples
a) Fonction fenêtre :
On se propose d'étudier le spectre d'un signal continu du type fenêtre centré, d'amplitude 1 et
de largeur ττττ .x(t)
τ
t−τ/2 τ/2
Figure 7
τ /2
- Le signal x(t) est pair ⇒ x(t) = 2 ∫ cos (2π f.t ) dt -τ /2
soit : X(f) = τ [ sinc ( τ.π .f ) ] .

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 38/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
39
Fig 7 : spectre de la fonction fenetre
Figure 8
b) Impulsion de dirac δδδδ(t) :
On peut approximer δ(t) par la fonction fenetre d'amplitude 1/τ et de largeur τ . En effet :
δ (t) = lim Π τ (t ) ⇔ ∆( f ) = lim τ sinc(τπ f ) = 1 ⇔ ∆( f ) = 1 . τ→ 0 τ→ 0
c) Signal signe Sign(t) :
1
-1t
x(t)=sign(t)
Figure 9
x(t) =sign(t) ⇔ X(f) = VP(-j / π f) = 1/ j π f pour f > 0 ,
X(f) = 0 ailleurs .
c) Signal Echelon Γ (t) :
Γ (t)
1
0 t
x(t)=sign(t)
Figure 10
x(t) =Γ (t) ⇔ X(f) = 0.5 δ (f) + ( 1/ j π f ) .
-4 -3 -2 -1 0 1 2 3 4-0.5
0
0.5
1
1.5
2

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 39/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
40
Γ (f)
Figure 11 f
d) signal triangulaire :
X(f ) = A τ [ sinc(τπ f ) ] 2
x(t)
t
A
−τ τ
f
X(f)
1/τ 2/τ−1/τ
τA
Figure 12
3-4- Propriétés de la Transformée de Fourier
a) Linéarité
Si les signaux x1(t) et x2(t) ont respectivement pour transformées de Fourier X 1(f) et X 2(f)
alors :
F [α x1(t) + β x2(t) ] = α F[x1(t)] + β F[x2(t)] , ( α et β ∈ ℜ )
soit : F [α x1(t) + β x2(t) ] = α X 1(f) + β X 2(f) .
b) Translation temporelle
Le retard temporel d’un signal x(t) se traduit par une rotation fréquentielle de sa transformée
de Fourier.
F[ x(t-τ ) ] = e-j2π f τ X(f) .
c) Symétrie hermitienne
Pour les signaux réels, on peut montrer que :X(-f) = X(f)* ∀ f ∈ ℜ
où (*) désigne le conjugué.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 40/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
41
Cette propriété montre que le spectre d’amplitude | X(f) | est toujours pair .
d) Dérivation
X(f). f (j2 ]dt
xd [ k
k
k
))(
π = F
e) Similitude
Une dilatation ou un étalement de l’échelle temporelle se traduit par une compression de
l’échelle fréquentiel et vice-versa.
)a
f X(.
a
1 [x(at)] = F
Cette propriété montre qu’un signal et son spectre ne peuvent être simultanément finis.
f) Moyenne temporelle et fréquentielle
La valeur moyenne ou la composante continue d’un signal est égale à la valeur à l’origine de
sa transformée de Fourier. Cette propriété peut être obtenue directement de l’expression de la
transformée de Fourier en remplaçant f par zéro, telle que :
dt x(t) X(0) x
moy ∫ ∞
∞−
==
de même la valeur à l’origine du signal vaut :
.df X(f) x(0)
∫ ∞
∞−
=
g) Dualité
Cette propriété qui permet d’obtenir de nouvelles paires de transformées de Fourier à partir
d’autres déjà connues, s’exprime de la façon suivante :
si le signal x(t) a pour transformée de Fourier X(f), alors celle du signal X(t) n’est que x(-f) .
soit :
x(t) → X(f) ⇒ X(t) → x(-f)
h) Conjugaison
Si le signal x(t) est complexe alors sa transformée de Fourier est le conjugué de X(-f) , soit :
x(t) → X(f) ⇒ x*(t) → X*(-f) .
3-5- Théorème de Perceval
On considère les deux signaux apériodique x(t) et y(t) à énergie finie, définis sur ℜ , continus
et dont l'intégrale de chacun est bornée, alors on peut montrer que la transformée de Fourier
conserve le produit scalaire, soit :
df f (*Y X(f) dt t (* y x(t) ∫ ∫ ∞
∞−
∞
∞−
= ))
En effet,
dt df *]e f [Y( x(t) dt t (* y x(t) ft j
∫ ∫ ∫ ∞
∞−
∞
∞−
∞
∞−
= π 2))

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 41/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
42
,df (f)*Y dt e x(t) ft j∫ ∫
∞
∞−
∞
∞−
−= π 2
df (f)*Y X(f) .∫ ∞
∞−
=
3-6- Relation entre série de Fourier et transformée de Fourier
Soit un signal périodique x(t) de période T et de motif élémentaire xT (t). On peut écrire alors :
eC dt nT t x t xn
t T
n j
n
n
T ∑∑∞
−∞=
∞
−∞==−=
π 2
)()(
avec : .)()(
0
2
n X T
1
T
n X
T
1 e(t) x
T
1 C
T T
T t
T
n j
T n
===
∫
− π
où X T (n) est la Transformée de Fourier de xT (t) .
Il vient :
e T
n X
T
1 dt nT t x t x
n
t T
n j
T
n
T ∑∑∞
−∞=
∞
−∞==−=
π 2
)()()(
En appliquant la Transformée de Fourier, on aura :
T
n
-(f T
n
X T
1
f X n
T
∑
∞
−∞== .))()( δ
Donc la périodisation temporelle se traduit par une discrétisation spectrale à un coefficient
près.
x(t) X(f)
t f
x(t) X(f)
0 T t 1/T f
Figure 13
3-7- Formule de Poisson

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 42/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
43
La discrétisation temporelle se traduit par une périodisation spectrale à un coefficient près.
En effet, si on appelle x(t) le signal continu et y(t) le même signal discrétisé, alors celui-ci a
pour expression :
nT t x(nT) t yn
∑∞
−∞=
−= )()( δ
En appliquant la Transformée de Fourier, on obtient :
T
n-(f X
T
1 f Y
n
∑∞
−∞=
= .))(
• Exemples :
* Peigne de Dirac :
nT t t peign
T ∑∞
−∞=
−= )()( δ
D’après la formule de Poisson , il vient :
T
PeigT
1
T
n-(f
T
1 f Peig
n T
T ∑∞
−∞=
== .)1
())( 1δ
x(t) X(f)
1 1/T
0 T t 1/T f
Figure 14
* fenêtre discrète :
x(t) = nT t t T
T n
∑−=
−=Π2
2
)()(
τ
τ τ δ .
]
T
n- f inc[sT
f n∑∞
−∞=
=Π .)()( π τ τ τ
x(t) X(f)
1 1/T
-τ/2 0 T τ/2 t 1/T f
Figure 15
4-Transformée de Fourier à court terme

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 43/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
44
L’un des inconvénients de la FFT est son manque de localisation temporelle. En effet,
l’analyse de Fourier permet de connaître les différents harmoniques d’un signal, mais ne
permet pas de savoir à quels instants ces fréquences ont été émises. Cette analyse donne une
information globale et non locale, d’où la nécessité de la mise en place d’une analyse temps
fréquence qui permettra une localisation des périodicités dans le temps. Le spectrogramme est
la représentation temps fréquence la plus courante. C’est une représentation non paramétrique
de la distribution énergétique du signal dans le domaine spectro- temporel. Le principe de cette
méthode est d ‘effectuer une FFT à court terme en utilisant une fenêtre glissante, c’est à dire
qu’on analyse une portion limitée du signal, prélevée à l’aide d’une fenêtre de pondération
dynamique ( fenêtre de Hamming par exemple). Pour ne pas perdre d’information et assurer
un meilleur suivi des non stationnarités, les fenêtres se recouvrent, elles ont généralement une
longueur de 256 ou 512 points et le recouvrement est de 50%, soit 128 ou 256 points. Afin de
compenser le niveau plus faible des aigus , on utilise utilisé un filtre passe haut, dit de pré
accentuation. Le schéma de principe est le suivant :
signal Spectrogramme
fig.16. Principe de la TFCT ( spectrogramme )
4- Transformée de HILBERT
Filtre de pré
accentuation
Fenêtreglissante de
Hamming F.F.T
Figure 17 : Spectrogramme d’un signal parole
Le spectrogramme est une représentation bidimensionnelle du spectre. Le spectre
d’amplitude est marqué par des zones sombres. Si le filtre passe bande a une bande large
(512 points) l’étalement du spectrogramme donne une bonne résolution temporelle et une
résolution fréquentielle faible alors que si le filtre a une bande étroite (128 points) il donne
une bonne résolution fréquentielle et une mauvaise résolution temporelle. La figure 17
représente les spectrogramme large bande d’un signal parole.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 44/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
45
4-1. Définition
C'est la transformée qui a un signal x(t) associe le signal y(t) tel que :
Y(f) = TH(f) X(f)avec :
.)()(
)()( f sgn j
f X
f Y f TH −==
TH(f)
j
f
Figure 18
La Transformée de Hilbert inverse est :
]T
n- f inc[s
T f
n
∑∞
−∞=
=Π .)()( π τ τ
τ
4-2-Réponse impulsionnelle
La réponse impulsionnelle h(t) n'est pas causale puisqu’elle n’est pas nulle pour les temps
négatifs.
.1
)( )t
Vp( t hπ
=
h(t)
0 t
Figure 19
4-3-Réponse fréquentielle
La transformée de Hilbert est une fonctionnelle à déphasage pur (en quadrature) . Sa réponse
fréquentielle est donnée par la courbe du gain et de phase :
|H(f)| = 1
.)()( f sgn
2
f
π ϕ
−=
|H(f)| ϕ [H(f)]

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 45/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
46
1 +π /2
0 f f
-π /2
Figure 20
4-4. Propriétés
• La densité spectrale d'énergie d'un signal à énergie finie x(t) est égale à sa
transformée de Hilbert. En effet :
Y(f) = TH(f) . X(f) ,
il vient :
S y(f) = |TH(f)|2 . S x(f)
S y(f) = |j sin (f)|2 . S x(f) ,
il en résulte :
S y(f) = S x(f) .
• L'énergie d'un signal x(t) est égale à sa transformée de Hilbert.
Cette propriété découle de la précédente en utilisant la relation :
.∫ ∫ ∞
∞−
∞
∞−
===
y y
x x E df (f)S df (f)S E
• Le produit scalaire d’un signal à énergie finie et de sa transformée de Hibert est nul .
En effet, si y(t) est la transformée de x(t) par TH(f),alors :
.0)(),( dt y(t) x(t) t yt x
==>< ∫
∞
∞−
Donc les deux signaux sont orthogonaux.
.)(),( df TH(f) df Y(f) X(f) t yt x
2
∫ ∫ ∞
∞−
∞
∞−
==><
soit :
.)(),( 0 df j sgn(f) df Y(f) X(f) t yt x
2
∫ ∫ ∞
∞−
∞
∞−
===><
4-5. Signal analytique

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 46/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
47
Comme la Transformée de Fourier possède la symétrie hermetienne X(-f) = X*( f ), alors on
peut caractériser un signal par la connaissance de sa Transformée de Fourier pour les
fréquences positives (à un facteur de 2 prés). Cela a pour avantage de rendre le signal causal,
de simplifier le traitement et de donner une valeur physique (positive) à la variable
fréquentielle.
X(f) X a(f)
2A
A
f f
Figure 21
a) Définition
On appelle signal analytique xa(t) associé au signal réel x(t), le signal dont la Transformée de
Fourier est égal à deux fois celle du signal original pour les fréquences positives et nulle
ailleurs. En effet, si :
x(t) )(.
f X H H T →
alors :
xa(t) 00
0)(2
<>
→ f pour
f pour f X H
b) relation entre un signal analytique et son original
D’après la relation précédente, on peut écrire que :
X a(f) = 2 Γ (f) X(f) = [1 + sgn (f)] X(f) ,
= [1 + j (- j sig (f)] X(f) = [1 + j TH(f) ] X(f) ,
il vient par la linéarité :
xa(t) = x(t) + j + x H (t) .
Donc, on peut retrouver le signal original x(t) à partir de la partie réelle de son signal
analytique et sa transformée de Hilbert à partir de la partie imaginaire de ce dernier.
Quant au signal analytique, il peut être calculé par la transformée de fourier inverse, soit :
[ ]
=
=
∫ ∞+
df e f X t x
t x Rt x
ft j
a
ae
π 2
0)(2)(
)()(
•••• Exemple :
Calculer le signal analytique d’un signal sinusoïdal d’amplitude unité et de fréquence F o.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 47/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
48
df e f X t x ft ja
π 2
0)(2)( ∫
+∞= ,
df eF f t x ft joa
π δ 2
0)()( −= ∫
+∞= e-j2πFo t
5- Opérations sur les signaux
5-1. Convolution
On appelle produit de convolution de deux signaux à énergie finie x(t) et y(t), la fonction
définie par :
d )- y(t ) x( t yt xt y x
.)(*)())(*( θ θ θ ∫ ∞
∞−
==
D'après l'inégalité de Schwartz, ce produit est toujours définie puisque les énergies
||x||2 et ||y||2 sont finies.
a- Propriétés :
•••• Commutativité : [ x * y](t) = [y * x](t) .
On peut démontrer cette propriété en utilisant la propriété suivante :
posons u = t - θ ⇒ du(-)u y(u)- x(t t yt x
.))(*)( ∫ ∞
∞−
=
•••• Distributivité : [x * ( y + z)](t) = [(x * y) + (x * z](t)
•••• Associativité : [x * ( y * z )](t) = [(x * y) * z](t)
•••• Elément neutre δ (t) : x(t) * δ (t) = x(t)
•••• Dérivation : dt
t dy* x(t) t y
dt
t dx
dt
t y xd .
)()(*
)())(*(==
b- Exemples de convolution
•••• Convolution d’un signal avec l'échelon de position Γ (t) :
d ) x( d )-(t ) x( t x
t
.))(*( θ θ θ θ θ ∫ ∫ ∞−
∞
∞−
=Γ =Γ
A titre d’exemple, calculons la convolution de l’échelon de position avec lui même. Dans ce
cas, reprenons la dernière expression et remplaçons x(t) par Γ (t) :
d )( t
t
.))(*( θ θ ∫ ∞−Γ =Γ Γ
si t < 0 , alors : (Γ * Γ )(t) = 0 ,

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 48/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
49
si t ≥ 0 , alors : .t d t
t
==Γ Γ ∫ θ 0
))(*(
Γ (t)*Γ (t)
0 t
Figure 22
•••• Convolution d’un signal avec la fonction fenêtre ∏τ(t), τ > 0
d ) x( t x
t
t
.))(*(2
2
θ θ τ
τ τ ∫
+
−
=Π
A titre d’exemple, calculons la convolution de l’échelon de position avec la fonction fenêtre de
largeur τ. Dans ce cas, reprenons la dernière expression et remplaçons x(t) par Γ (t) :
d )( t
t
t
.))(*(2
2
θ θ
τ
τ τ ∫
+
−
Γ =ΠΓ
si t < -τ /2, alors : (Γ * ∏τ)(t) = 0 ,
si -τ /2 ≤ t < τ /2 , alors :2
t d )( t
t
τ θ θ
τ
τ +=Γ =ΠΓ ∫ +
2
0
))(*(
si t ≥ τ /2 , alors : . d t
t
t
τ θ
τ
τ τ ==ΠΓ ∫
+
−
2
2
))(*(
Γ (t)* ∏τ(t)
τ
-τ /2 0 τ /2 t
Figure 23
c- Interprétation physique de la convolution
On peut approcher x(t) par une fonction en escalier (quantifiée) selon figure suivante :

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 49/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
50
x(t)
kT t
Figure 22
On peut dans ce cas faire l’approximation suivante :
kT)-(t x(kT) t xk
T ∑∞
−∞=
Π= .)(~
∏Τ(t) est la fonction fenêtre de largeur T.
Cette approximation est d'autant plus précise que (T ) tend vers zéro.
Donc, si T → 0 , alors : ∏Τ(t-kT) → δ (t) et .(t) x t x =)(~
posons θ = kT , il vient :
d )-(t ) x( t x
.)( θ θ δ θ ∫ ∞
∞−
=
Et si on suppose que y(t) = H[x(t)] est la sortie d'un système linéaire H , pour une
entrée x(t), il vient :
]kT)-(t x(kT) H[ t yk
∑∞
−∞=
= .)(~ δ
]kT)-(t H[ x(kT) t yk
∑∞
−∞=
= .)(~ δ
kT)-(t h x(kT) t y
k
∑∞
−∞=
= .)(~
où h(t) désigne la réponse impulsionnelle du système H.
En posant θ = kT , et en faisant T → 0 , il vient :
d )-(t h) x( t y
.)(~ θ θ θ ∫ ∞
∞−
=
Donc, la réponse à une entrée quelconque est la convolution de celle-ci avec la réponse
impulsionnelle du système.
On peut interpréter la convolution par une imagerie qui observe le passé avec une vue
sur l'état propre pour reproduire le futur. En effet, dans la dernière expression :t représente le présent,
θ représente le passé,
t-θ représente le temps dans le passé,

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 50/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
51
h(t-θ ) représente l’état et les actions orientés vers le passé.
d- Convolution graphique
On peut calculer graphiquement le produit de convolution en utilisant l’expression de
l’intégrale suivante :
d )- y(t ) x( t y x
.))(*( θ θ θ ∫ ∞
∞−
=
Celle-ci n’est que la surface du produit du signal x(θ ) et une version du signal y(θ ) retournée
dans le temps y(-θ ) puis translatée de t . En faisant ce calcul pour de différentes valeurs de t ,
on obtient l’allure et la valeur de l’expression du produit de convolution des deux signaux.
A titre d’exemple, prenons les deux signaux x(t) et y(t) de la figure suivante :
x(t) y(t)
1 1
0 t 0 τ t
x(θ ) y(-θ )
1 1
0 θ -τ 0 θ Figure 23
- Traçons en 1ère étape le produit [ x(θ ).y(t-θ ) ] à t donnée.
y(t-θ ) x(θ) y(t-θ )
1
t
0 t θ t-τ t θ
Figure 24
- Déterminons l'intégrale de ce produit par sa surface.
- Puis refaire de ce produit pour valeurs de t.
• Exemple :
Prenons x(t) la rampe unitaire et y(t) la fonction fenêtre de largeur τ , il vient :

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 51/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
52
x(t) y(t)
1
0 t −τ/2 τ/2 t
• pour t ≥ 0 , on aura :
y(t-θ ) x(θ) y(t-θ )
1
0 t
0 t θ t-τ/2 t t+τ/2
Figure 25
- L’intégrale de convolution est la surface hachurée et est égale à la surface du trapèze :
S(t) = 0.5 τ ( 2 t ) = τ t .
• pour t < 0 , on aura : S(t) = 0 car la rampe x(θ ) est nulle pour θ < 0 .
x(t)*y(t)
arctg τ t
Figure 26
•••• Convolution de l'échelon de position Γ (t) avec lui même :
Γ (θ ) Γ (-θ )
1 1
0 θ 0 θ
Figure 27
- Traçons en 1ère étape le produit [ Γ (θ ).Γ (t-θ ) ] à t donné.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 52/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
53
y(t-θ ) Γ (θ) Γ (t-θ )
1 1
00 t θ t θ
Figure 28
L’intégrale de convolution est égale à la surface hachurée = 1 . t = t .
En définitif , on a :
pour t < 0 : (Γ * Γ )(t) = 0 ,
pour t ≥ 0 : .t d t t
==Γ Γ ∫ θ 0
))(*(
Γ (t)*Γ (t)
0 t
Figure 29
On retrouve bien le même résultat obtenu au paragraphe précédent par calcul analytique.
•••• Convolution de l’échelon de position avec la fonction fenêtre ∏τ(t)
Γ (θ ) ∏τ(-θ )
1 1
0 θ -τ/2 0 τ/2 θ
Figure 30
- Traçons le produit [ Γ (θ ). ∏ τ (t-θ ) ] à t donné puis sa surface.
si t ≥ τ /2 , alors : (Γ * ∏τ)(t) = τ ,
∏τ(t-θ ) Γ (θ) ∏τ(t-θ )

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 53/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
54
1 1
0
t-τ/2 t t+τ/2 θ t-τ/2 t t+τ/2 θ Figure 31
si -τ /2 ≤ t < τ /2 , alors :2
t t τ
τ +=ΠΓ ))(*(
∏τ(t-θ ) Γ (θ) ∏τ(t-θ )
1 1
0
t-τ/2 t t+τ/2 θ t+τ/2 θ
Figure 32
si t < τ /2, alors : (Γ * ∏τ)(t) = 0 ,
∏τ(t-θ ) Γ (θ) ∏τ(t-θ )
1
0 t-
τ/2 t t+τ/2 θ θ
Figure 33
Donc, en définitif on obtient :
Γ (t)* ∏τ(t)
τ
-τ /2 0 τ /2 t
Figure 34
5-2. Autocorrélation et Intercorrélation
a- Intercorrélation de deux signaux

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 54/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
55
Pour deux signaux à énergie finie x(t) et y(t), on peut associer une fonction d'intercorrélation
R x,y qui définie la dépendance entre les événements de chacun et la mesure de similarité entre
eux. Elle est donnée par l’expression suivante :
dt )(t * y)t x( R
y x
.)(,
τ τ +=
∫
∞
∞−
Dans le cas des signaux périodiques à énergie infinie, la fonction d'intercorrélation R x,y
est donnée par l’expression suivante :
dt )(t * y)t x( T
1 lim R
T
T y x .)(
0
, τ τ += ∫ ∞→
•••• Propriétés
♦ R x, y(τ ) = R* y,x(-τ ) : symétrie hermitienne .
En effet :
dt )(t * x)t y( R
x y .)(, τ τ −=− ∫ ∞
∞−
posons u= t-τ
R du*])u(* y x(u)[ du )u(* x)u y( R y x
x y .)(*)( ,, τ τ τ τ =+=+=− ∫ ∫ ∞
∞−
∞
∞−
♦ R xy(τ ) ≠ R yx(τ )
♦ R xy(τ ) = x(τ ) * y*(-τ ) .
On peut montrer cette propriété en utilisant la relation de la convolution :
d )(-t * y) x( (-t)* y*(t) x
.θ θ θ −= ∫ ∞
∞−
)(t R d )(t * y) x( xy
=+=
∫
∞
∞−
θ θ θ
b- Autocorrélation
Pour un signal à énergie finie, on définie une fonction d'autocorrélation qui définie la
similarité entre un signal et une version décalée de celui-ci. Elle a pour expression :
dt )(t * x)t x( R
x x .)(, τ τ += ∫ ∞
∞−
Cette expression peut être obtenue de R xy(τ ) en prenant x(t) = y(t) .
Dans le cas des signaux périodiques à énergie infinie, la fonction d'intercorrélation R x,x
s’écrit :

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 55/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
56
dt )(t * x)t x( T
1 lim R
T
T x x .)(
0
, τ τ += ∫ ∞→
* Propriétés
♦ R xx
(τ ) = R* xx
(-τ ) : symétrie hermitienne .
♦ si x(t) est réel alors R xx
(τ ) est réelle et paire et possède un maximum en
R xx
(0 )
En effet, si x(t) est réel, alors :
dt ) x(t )t x( R
x x .)(, τ τ −=− ∫ ∞
∞−
Posons u = t-τ , il vient :
)( R du )u x()u x( R x x,
x x .)(, τ τ τ =+=− ∫ ∞
∞−
ce qui montre que R xx est paire.
D’autre part, l’inégalité de Schwartz |R x,y(τ )|2 ≤ R x,x(0).R yy(0) , montre que le maximum de la
fonction d’autocorrélation est R x,x(0) et ce, en posant simplement y(t)=x(t) , soit :
|R x,x(τ )|2 ≤ R2 x,x(0) soit R x,y(τ ) ≤ R x,x(0).
car R x,x(0) ≥ 0 .
♦ Inégalité de Schwartz : |R x,y(τ )|2 ≤ R x,x(0).R yy(0) .
Cette propriété se démontre en utilisant la même propriété de la norme et du produit scalaire.
♦ R xx
(0 ) est l’énergie du signal et R xx
(τ ) ≤ R xx
(0 ) .
En effet,
E dt x(t) dt 0)(t * x)t x( R x
2
x x .)0(, ==+= ∫ ∫
∞
∞−
∞
∞−
♦ Si x(t) est périodique de période T , alors R xx
en est de même ( périodique de
période T ) et possède un maximum à l’origine R xx
(0 ) ..
dt )(t * x)t x( T
1 lim R
T
T x x .)(
0
, τ τ += ∫ ∞→
dt ]ee C eC [T 1 lim R T
n2
jt T
n2
jn
-n
T
t T
n2
jn
-nT
x x* .)(
0
,τ
π π π
τ −−∞
∞=
+∞
∞=∞→ ∑∫ ∑=
soit :

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 56/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
57
eC dt eC T
1 lim R
T
n2 j2
n
-n
T
T
n2 j2
n
-nT
x x .)(
0
,
τ π
τ π
τ −∞
∞=
−∞
∞=∞→∑∫ ∑ ==
Cette relation n’est que la décomposition en série de Fourier de R xx(τ ). Elle montre que celle-ci
est périodique de période T et ayant pour spectre d’amplitude |C n|2 .
Cette propriété est très importante en analyse corrélatoire puisqu’elle permet de
déterminer la périodicité d'un signal ainsi que son spectre d’amplitude.
•••• Exemple 1 :
Fonction d’autocorrélation du signal fenêtre x(t) = ∏ τ (t), τ > 0
dt t .)t ( )( R
xx )( θ θ τ τ +ΠΠ= ∫ ∞
∞−
♦♦♦♦ si |θ | > τ , alors : R xx(θ ) = 0 ,
∏τ(t) ∏τ(t+θ ) ∏ τ (t). ∏ τ (t+θ )
1 1
0
-τ/2 τ/2 θ t t-τ/2 t t+τ/2 θ
θ−τ/2 θ+τ/2
Figure 35
♦♦♦♦ si |θ | ≤ τ , alors : R xx(θ ) = τ − |θ | , puisque :
∏τ(t) ∏τ(t+θ ) ∏ τ (t). ∏ τ (t+θ )
1
0
-τ/2 τ/2 θ t t-τ/2 t t+τ/2 θ
Figure 36
dt t .)t ( )( R
xx )( θ θ τ τ +ΠΠ= ∫ ∞
∞−
,- dt )( R
xx θ τ θ
τ
τ θ
== ∫ −
2
2
si θ > 0
et :

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 57/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
58
, dt )( R
xx θ τ θ
τ θ
τ
+== ∫ +
−
2
2
si θ < 0
♦♦♦♦ En définitif, l’expression générale de la fonction d’autocorrélation est :
R xx(θ ) = τ − |θ | , ∀ τ ∈ ℜ .
R xx(θ )
τ
-τ 0 τ θ
Figure 37
•••• Exemple 2 :
Fonction d’intercorrélation des signaux échelon de position Γ (t) et fenêtre ∏ τ (t)
dt t .)t ( )( R
xx )( θ θ τ +ΠΓ = ∫ ∞
∞−
- si θ < -τ/2 , alors : . )( R xy 0=θ
- si θ > τ/2 , alors : . dt )( R
xy τ θ
τ θ
τ θ
== ∫ +
−
2
2
Γ (t) ∏τ(t+θ ) Γ (t). ∏ τ (t+θ )
1 1
0
-τ/2 τ/2 θ t t-τ/2 t t+τ/2 θ θ−τ/2 θ+τ/2
Figure 38
- si |θ | ≤ τ/2 , alors : .
2
dt )( R
xy
τ θ θ
τ θ
+== ∫ +
2
0
En définitif, la courbe de la fonction d’autocorrélation est la suivante :

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 58/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
59
R xy(θ )
τ
-τ/2 0 τ/2 θ Figure 39
6- Analyse spectrale des signaux déterministes
6-1- Densité spectrale d’énergie
Pour les signaux à énergie finie, on définie la densité spectrale d’énergie d’un signal x(t) par
S x(f) par :
S x( f ) = | X( f )|2
L'énergie se déduit par la relation de Perceval :
.df (f)S E x
x ∫ ∞
∞−
=
6-2- densité spectrale de puissance
Pour les signaux à énergie infinie, on définie la densité spectrale de puissance S x(n) par :
S x(n) = |C n|2
La puissance moyenne s'exprime comme :
C P-n
nmoy ∑∞
∞=
= 2
En effet, d’après la définition de la puissance moyenne d’un signal périodique, on a :
dt t xt xT
1 limdt t x
T
1 lim P
T
T
T
T moy
∫ ∫ ∞→∞→==
00
2)(*)()(
dt e C eC T
1 lim
t T
n2 j
*n
T t
T
n2 j
n
-nT
.
0
π π −+∞
∞=∞→ ∫ ∑=
C dt T
1 C lim
2
n
-n
T 2
n
-nT
.
0
∑∫ ∑∞
∞=
∞
∞=∞→==
6-3- Densité inter spectrale
Si on désigne par S x et S y les densités spectrales des signaux x(t) et y(t) et par S yx la densitéinter spectrale d’énergie alors :
S y = S yx . S x

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 59/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
60
Prenons le cas d’un système linéaire d’entrée x(t) et de sortie y(t) et ayant comme une fonction
de transfert H(p), alors sa réponse fréquentielle Y(f) s’écrit :
Y(f) = X(f) H(f)
il vient :
Y*(f) = X*(f) H*(f) ,
en multipliant terme à terme, on obtient :
|Y(f)|2
= |X(f)|2
. |H(f)|2
.
soit :
S y= |H(f)|2
. S x
6-4- Relation entre la densité spectrale et la fonction d’auto corrélation
La fonction d'auto corrélation n'est que la Transformée de Fourier inverse de la densitéspectrale d’énergie .
R xx(τ ) = TF -1 [ S x(f) ] .
En effet, pour un signal à énergie finie :
dt )(t * x)t x( R
x x .)(, τ τ += ∫ ∞
∞−
D’après la relation de Perceval, on aura la nouvelle expression :
df e ) f (* X ) f X( R f j2-
x x ,)(,τ π τ ∫ ∞
∞−
=
(f)][STF df e X(f) x1- f j2-
2
.== ∫ ∞
∞−
τ π
6-5- distorsion harmonique
La distorsion harmonique d’un signal périodique représente le pourcentage des harmoniques du
signal ( portés par les fréquences multiples du fondamental ) par rapport au fondamental. En
général, un signal distordu induit des non linéarités de fonctionnement, diminue le rendement dusystème qu’il alimente et peut saturer la commande. Le taux de distorsion harmonique est donné
par l’expression suivante :
σ x =
X
X
i
i
i
i
2
1
2
2
∑
∑∞
=
∞
= .
• Exemple :
Calculons le taux de distorsion harmonique d’un signal carré périodique pair, d’amplitude A et
de fréquence F o .
x(t)

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 60/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
61
A
T o t
Figure 40
Le spectre du signal carré périodique est donné par :
pair est x(t) car a
)b j(a C nnnn .
22
1=−=
. 0 C et n
A2
2
a C 2n
12n12n =
+== +
+ π )12(
Donc :
σ x =
X
X
i
i
i
i
2
1
2
2
∑
∑∞
=
∞
=
.
• Remarque
Ce taux de distorsion est indépendant de la fréquence du signal et de son amplitude.
7- Synthèse harmonique des signaux
La décomposition en série de Fourier montre que l’on peut retrouver et reconstituer un signal à
partir de son spectre d’amplitude et de phase. Cependant, le problème de réalisabilité physique
réside dans le fait qu’on ne peut réaliser une infinité d’oscillateurs sinusoidaux qui
représentent les harmoniques du signal. Pour cela, on sera amené à réaliser une troncature
fréquentielle pour se limiter à un nombre fini de raies spectrales.
7-1- Reconstitution par interpolation
Dans ce cas, le signal reconstitué x N (t) peut s’exprimer comme suit :
eC (t) x t
T
n2 j
n
N
N -n
N .
π +
=∑=
soit encore :
df e]e X(f)T
1 (t) x
t T
n2 j
T t
T
n2 j
-n
N .[
0
π π +−∞
∞=∫ ∑=
et comme :
t
T
t
T
2
2
1sin[(N
eC t
T
n2 j
n
N
N -n
.
)sin(
])
π
π π +
=+
=∑
alors, il vient :

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 61/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
62
.df
f t (T
f t (T
2
2
1sin[(N
X(f)T
1 (t) x
T
N ∫ −
−+=
0 )]sin[
)])
π
π
Cette expression représente la formule d’un interpolateur qui permet de reconstituer le signal.
7-2- Reconstitution par synthèse harmonique
On peut aussi partir du spectre de fréquences pour reconstituer un signal en réalisant des
oscillateurs harmoniques, des amplificateurs et des déphaseurs. En effet, la décomposition en
série de Fourier sous la forme trigonométrique permet d’exprimer le signal x(t) sous la forme :
t T
t T
2
2
1sin[(N
eC t
T
n2 j
n
N
N -n
.
)sin(
])
π
π π +
=+
=∑
.
Donc, la reconstruction du signal x(t) est réalisable si le spectre est à support borné ou à la
limite s’il tend asymptotiquement vers zéro. Dans ce cas, les oscillateurs sinusoïdaux et les
déphaseurs représenteront les fonctions sin(2π t/T), et cos(2π t/T), les amplificateurs à gains
variables donneront les valeurs de an et bn, une alimentation continue générera la composante
continue du signal ao /2, enfin un sommateur réalisera la somme de toutes les fonctions et
génère ainsi le signal x(t) comme le montre déjà la figure suivante.
π/2 b1
F 1 a1
π/2 b2
F 2 a2
. ...................................................................... x(t)
...........................................................................
π/2 bn
F n an
ao /2
Figure 41
• Exemple :
Utilisons la méthode de synthèse harmonique pour générer un signal carré pair, de fréquence50 Hz et d’amplitude A=1, puis retrouvons ce résultat par simulation.
On sait que le spectre d’un signal carré pair est donné par :

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 62/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
63
.
)12(
N n 0 b
0 a et n
A4 a
n
2n12n
∈∀=
=+
=+ π
Donc, le signal carré x(t) s’écrit sous la forme :
.t]F ncos[2 n
4 = x(t)
n
o∑∞
=
−−1
)12()12(
π π
Le schéma synoptique suivant permet de reconstituer pratiquement le signal carré.
F 1=50Hz 4/π
F 2 =100Hz 4/3π
. ...................................................................... x(t)
...........................................................................
F n =nF 1 4/(2 n-1)π
Figure 42.
Donc la reconstitution est d’autant plus fidèle que le nombre des harmoniques pris en compte
est élevé.
Bien sur, on ne peut pas reconstituer un signal dont le spectre n’est pas borné. Par exemple :
♦ l’impulsion de Dirac ne peut pas être reconstituée physiquement car son spectre est
infini et est égal à l’unité.
♦ un signal dont le spectre correspond à une rampe n’est pas aussi restituable
physiquement pour la même raison.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 63/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
64
EXERCICES CORRIGES DUCHAPITRE 2
♦♦♦♦ Enoncé de l'exercice 1
a) Calculer le spectre d’un signal sinusoïdal redressé en simple alternance de fréquence F oet d’amplitude unitaire. En déduire son taux de distorsion harmonique.
b) Même question pour un signal double alternance.
♦♦♦♦ Corrigé de l'exercice 1
a) Le signal simple alternance est exprimé par la relation :
x(t) = U o cos ( 2π f o t) pour | t | < T o/4 ,
x(t) = 0 pour T o/4 < | t | < T o/2 .
0 20 0 40 0 60 0 8 00 10 00 12 0 0
t (ms)0
0. 2
0. 4
0. 6
0. 8
1
. x (t )
Figure 43: signal redressé en double alternance
Le signal x(t) est pair donc :
bn = 0 .
Sa valeur moyenne est égale :
ao /2 = U o / π .
et :
an = 0.5 U o sinc[(1-n)π/ 2 ] + sinc[(1+n)π/ 2 ] .
• si n est impair ( n=2 p+1) ⇒ a 2p+1 = 0 ,
• si n est pair ( n=2 p) ⇒ a2 p = 2 (-1) p U o / π(1-4 p2) .
an

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 64/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
65
0 2 4 6 8
figure 44 : spectre du signal redressé
d'où :
xU
n(t) =
2 U+
..
o
n=1
o
π π
∞∑ −
−4
4 12( )cos( 2nωo t)
* La puissance moyenne est donnée par le théorème de Parceval :
∑∑∑∞
=
∞
=
∞
−∞=
+=+=1
220
1
22,
42
42
n
n
n
n
2
0
n
nmoy a
a
C C =C P
soit encore :
...)1225
1
225
1
9
1(
2
42
4
22
1
220 ++++=+=
22
∞
=∑
π π oo
n
nmoy
U
U a
aP
car : C n = 0.5 (an - j bn) , a0 = 0 et bn = 0 .
Il vient :Pmoy = U o
2 / 4 .
- Le taux de distorsion du signal redressé simple alternance est :
σ = =
∞∑a
a
n
n
2
2
2
2 = 0,28
b) Le signal double alternance est exprimé par la relation :
x(t) = U o cos ( 2π f o t) , qui est périodique de période T o/2.
0 0 . 5 1 1 . 5 2 2 . 5 3
0
0 . 1
0 . 2
0 . 3
0 . 4
0 . 5
0 . 6
0 . 7
0 . 8
0 . 9
1
t e m p s
x
( t )
figure 45 : signal redressé en double alternance
Le signal x(t) est pair donc :

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 65/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
66
bn = 0 .
Sa valeur moyenne est égale :
ao /2 = 2 U o / π .
* si n est impair ⇒ an = 0 ,
* si n est pair ⇒ aU
nn =
..
o−−
4
4 12π ( )
d'où :
xU
n(t) =
2 U+
..
o
n=1
o
π π
∞∑ −
−4
4 12( )cos( 2nωo t)
0 1 2 3 4 5 6 7 8 n
an
o oo o o
figure 46 : spectre du signal redressé
* La puissance moyenne est donnée par le théorème de Parceval :
...)1225
1
225
1
9
1(
24
42
4
22
1
220 ++++=+=
22
∞
=∑
π π oo
n
nmoy
U
U a
aP
Donc :
Pmoy = U o2/ 2 .
Le taux de distorsion du signal redressé en double alternance est :
σ = =
∞∑a
a
n
n
2
2
2
2 = 0,28
♦♦♦♦ Enoncé de l'exercice 2
Calculer le spectre d’amplitude et de phase des signaux suivants :
a) x1(t) = e-a | t |
( a > 0 )
b) x2(t) = e-π t 2
c) x3(t) = 1/t
d) x4(t) = sinc(π F ot )
e) signal triangle x5(t) = TRIτ(t)

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 66/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
67
♦♦♦♦ Corrigé de l'exercice 2
! x1(t) = e-a | t |
( a > 0 ) ⇒ X3(f) = 2 a / (a2 + 4π2 f
2)
! x2(t) = e-π t 2 ⇒ X2(f) = = e
-π f 2
! x3(t) = 1/t ;
on sait que la transformée de Hilbert de )sgn(. .1 f jest t
−π
⇒ )sgn(.. 3(f) f j X π −=
! x4(t) = sinc(π F ot ) ⇒ d’après la propriété de la dualité : X4(f) = (1/Fo) . FEN (-f)
Soit : X4(f) = (1/Fo) . FEN (-f)
! x5(t) = signal triangle x2(t) = TRIτ(t) ⇒ X2(f) = τ sinc2(πτ f)
♦♦♦♦ Enoncé de l'exercice 3
Calculer le produit de convolution des signaux suivants :
a) x(t) = ∏ τ (t-0.5τ ) et y(t)= ∏ τ (t-0.5τ ) ,
b) x(t) = )1(τ t
− . ∏ τ (t-0.5τ ) et y(t)= ∏ τ (t-0.5τ ) .
♦♦♦♦ Enoncé de l'exercice 4
a) Calculer le taux de distorsion d'un signal carré.
b) Expliquer pourquoi ce signal n'est pas commode pour la commande des machines
c) Calculer le taux de distorsion d'un signal MLI
♦♦♦♦ Corrigé de l'exercice 4
a - Le signal carré possède un taux de distorsion de 45 % .
b - Ce signal est très riche en harmoniques et ne s'adapte pas à la commande des machines
car il engendre de fortes distorsions et même des saturations de la commande.
c - Nous savons que le signal MLI s'écrit selon la décomposition de Fourier :
x(t) = (Α0 /2) + Σ A2n+1 cos[(2n+1)ω 0 ].
avec:
An = (4 E /n.π ). [1 - 2 cosnθ
1 + 2 cosnθ 2 - 2 cosnθ 3 + ... + 2(-1)k cos nθ k ],
E : est l’amplitude du signal ,
Α0 / 2 : est sa valeur moyenne .
Pour annuler les harmoniques 3, 5, 7 et 9, il faut résoudre le système d'équations suivant :

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 67/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
68
1 - 2 cos3θ1 + 2cos3θ2 - 2cos3θ3 + 2cos3θ4 = 0
1 - 2 cos5θ1 + 2cos5θ2 - 2cos5θ3 + 2cos5θ4 = 0
1 - 2 cos7θ1 + 2cos7θ2 - 2cos7θ3 + 2cos7θ4 = 0
1 - 2 cos9θ1 + 2cos9θ2 - 2cos9θ3 + 2cos9θ4 = 0
La résolution permet de donner les valeurs des angles de commutation suivants :
θ1 = 15,96° θ2 = 24,79° θ3 = 46,98° θ4 = 50,37° θ5 = 90°
θ6 = 129,63° θ7 = 133,02° θ8 = 155,21° θ9 = 164,04° θ8 = 180°.
On note que l'angle 180° correspond ici à une période complète du signal soit 20 ms, et que les
angles θ5 à θ8 sont obtenus par symétrie.
d - Le nouveau taux de distorsion de ce signal vaut 6 % . Cette valeur est inférieure à la
précédente, ce qui favorise l'utilisation de ce type de signal pour la commande des machinesélectriques.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 68/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
69
Chapitre III
LES SIGNAUX ALÉATOIRES
1- Définition
On appelle signal aléatoire ou processus aléatoire un ensemble de fonctions auquel on adjoint
une loi de probabilité ou une loi statistique. Ainsi, on pourra modéliser comme des signaux
aléatoires les signaux dont le processus de production est trop compliqué à décrire, ou
méconnu, ou des signaux pour lesquels l'aléa provient de la propre incertitude de l'observateur.
En effet, la plupart des signaux naturels peuvent être décrits à l'aide d'équations de la
physique si on connaît bien tous les paramètres, les caractéristiques et les phénomènes qui les
régissent. Même les signaux non déterministes tels que le signal parole, les signaux sismiques,la pression atmosphérique, et même un tirage de loto n’échappent pas à cette propriété. Ce qui
diffère dans ce cas, c’est que le système dépend d'un grand nombre de variables et de
paramètres et devient ainsi trop compliqué à décrire.
Ainsi, on peut associer à une variable aléatoire ϕ une fonction définie par :
F : ℜ → S
ϕ → X (t, ϕ)
On notera :
ϕ : une variable aléatoire ,
X(t,ϕ) un signal aléatoire , x(t) une réalisation du processus aléatoire
xi(t) = X(t,ϕi) une réalisation particulière, obtenue pour ϕ = ϕi.
X i(ϕ)=X(t i,ϕ) une réalisation obtenue pour t = t i .
2- Description et représentation d'un signal aléatoire
Un signal aléatoire peut être caractérisé par une description statistique à partir des fonctions de
répartition, de densité de probabilité et des moments d’ordre un et deux du processus aléatoire.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 69/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
70
2-1- Foncti on de répartit ion
On définit la fonction de répartition qui est la fonction F(x) donnant la probabilité pour que la
valeur mesurée u soit strictement inférieure à .
F(x) = Prob( u< x )
La figure 1 donne un exemple de fonction de répartition pour la loi de Cauchy où
.
Fig 1. Exemple de fonction de répartition, la loi de Cauchy
2-2- Densit é de probabilit é
Si F(x) est différentiable, alors on définit une densité de probabilité p(x) par la dérivée de la
fonction de répartition F(x), soit :
p(x) = dF(x) / dx
C'est une fonction non négative mais ce n'est pas une probabilité, elle n'est pas nécessairement
inférieure à . Par exemple, la densité de probabilité de la loi de Cauchy est donnée par :
Fig.2. Exemple de densité de probabilité, la loi de Cauchy

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 70/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
71
2-3- Loi de probabilit és couramment ut ilisées
* Loi uniforme
La VA prend des valeurs uniquement dans l'intervalle [a,b]. Sa densité de probabilité est
nulle en dehors de cet intervalle, ainsi :
Fig.3. Densité de probabilité de la loi uniforme (a=-0.5 et b=1.5)
Sa fonction de répartition est composée de trois segments de droites :
F(x)
1
a=-0.5 b=1.5 x
Fig.4. Fonction de répartition de la loi uniforme (a=-0.5 et b=1.5)

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 71/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
72
* Loi gaussienne
Sa densité de probabilité p(x) a pour expression :
Fig.5. Densité de probabilité de la loi gaussienne
La densité de probabilité passe par son maximum pour .
Cette loi présente trois caractéristiques importantes :
Elle permet des développements mathématiques efficaces, en particulier en ce
qui concerne les variables aléatoires indépendantes parce qu'elle s'exprime comme
l'exponentielle d'une forme quadratique.
Toute l'information est donnée directement par les paramètres et quicaractérisent respectivement la valeur moyenne et la dispersion autour de cette valeur
moyenne.
Enfin, c'est la loi qu'on obtient naturellement en additionnant un grand nombre
de variables aléatoires indépendantes; elle représente bien un grand nombre de phénomènes
physiques aléatoires comme le bruit de fond, les erreurs des mesures, etc...
* Loi de Poisson
C'est la loi qu'on obtient en comptant des évènements aléatoires indépendants tels que le
décompte des appels sur une centrale téléphonique, comptage de voitures sur une route, etc..
C'est la loi centrale des études sur les files d'attente dans les réseaux de communication. Elledépend d'un paramètre qui caractérise le débit moyen du flux. La probabilité d'observer
événements pendant une durée est donnée par :
pour k > 0 et t > 0 .
La figure 6 donne la densité de probabilité pour de différentes valeurs de k.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 72/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
73
Fig.6. Densités de probabilités de la loi de Poisson
3- Caractérisation de VA par les moments
Il est souvent trop coûteux (au point de vue temps de calcul et traitement ) de caractériser une
variable aléatoire ou un ensemble de variables aléatoires par leur fonction de répartition ou
leur densité de probabilité. On peut se contenter d'informations partielles comme la valeur moyenne de la variable aléatoire et sa dispersion autour de cette valeur moyenne. Ces notions
sont quantifiées par la définition des moments.
3.1. Moment d’ordre un : Espérance mathématique
On dit que X(t,ϕ) est connu à un instant t i, si on connaît la loi de la variable aléatoire X(t i,ϕ).
Celle-ci est simplement une variable aléatoire, que l'on peut caractériser à l'aide du moment
d’ordre un appelé Espérance mathématique dont l’expression est la suivante :
ii
iii dX , X p(( X ,t X E )]m[X(t ϕ)ϕ)=ϕ)]= ∫ Ω
([
où :
Ω : désigne le domaine de variation de X i(ϕ) ,
p( X i , ϕ) : est la loi de probabilité conjointe de X(t i,ϕ).
3.2. Moment d’ordre deux , variance, écart type
Le moment d’ordre deux ( équivalent à une puissance ) d’une VA a pour expression :
ii dX X X t X ϕ)ϕ)ϕ)] ,p(( ,([E i
2
i
2 ∫ ∫∫ ∫ ΩΩΩΩ
====
La variance V(X) est donnée par le moment d’ordre deux de la variable centrée et représente
la dispersion autour de la valeur moyenne. :

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 73/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
74
[[[[ ]]]] iii dX X X X t X V ϕ)ϕ)ϕ)ϕ)) ,p()(E(-( ,(( i
22
i ∫ ∫∫ ∫ ΩΩΩΩ
====
L’écart type σ n’est que la racine carrée de cette variance. D’autre part, on remarque que le
moment d’ordre deux (puissance) est la somme de la variance et du carré de la moyenne
statistique ( valeur moyenne ) , soit :
E[X2] = V(X) + (E[X])2
3.3. Moments d'ordre supérieur à deux
Le moment d’ordre n d’un VA x est la quantité :
Dans le cas des variables aléatoires gaussiennes, ces moments se déduisent des moments du
premier et du deuxième ordre. Ils présentent un grand intérêt pour la séparation de variables
aléatoires indépendantes non gaussiennes.
Une autre caractérisation importante d'une densité de probabilité est son entropie définie par :
Cette quantité est un paramètre fondamental en théorie de l'information.
3.4. Moment d’ordre deux de deux VA, covariance
On appelle produit de covariance de deux variables aléatoires X 1 et X 2, l’epérance
mathématique de leur produit . Elle est donnée par l’expression :
2212
12121 dX dX X , X p( X X t X )t X E t X )t X C 1*(*([(([ )=)],=)], ∫ Ω
où X 2* : désigne le conjugé de X 2 .
Si X 1 = X 2, alors la covariance est appelée moment d’ordre deux et s’écrit :
1
2(*([([ dX X p( X t X )t X E )t X C 1
1111 )=)],=] ∫ Ω
.
• cas particuliers :
a) Dans le cas où les variables X 1 et X 2 sont indépendantes, alors la loi conjointe devient :
p(X 1 ,X 2) = p(X 1) p(X 2) ,

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 74/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
75
et la fonction de covariance s'écrit simplement :
C[X(t 1 ,t 2)] = E[ X(t 1). X(t 2)* ] = E[X(t 1) ] . E[X(t 2)*] ,
soit encore :
C[X(t 1 ,t 2)] = m[X(t 1)] . m[X(t 2)*] .
b) Si les variables X 1 et X 2 sont indépendantes et le signal x(t) est centré, c'est-à-dire sa
valeur moyenne est nulle, alors sa covariance en est de même, soit :
C[X(t 1 ,t 2)] = 0 .
Ce type de signal aléatoire est appelé bruit blanc.
4- Propriétés fondamentales
4.1. Stationnarité
On dit qu'un signal aléatoire est stationnaire si ses propriétés statistiques sont invariantes par la
translation temporelle. Cela se traduit par :
p[X(t 1),X(t 2),..., X(t k )] = p[X(t 1 -τ) , X(t 2 -τ ),..., X(t k -τ) ], ∀ τ ∈ ℜ .
Ou encore plus simplement :
p[X(t k )] = p[X(t k -τ) ] = ..... = p[X(0 ) ].
Il vient :
E[X(t k )] = E[X(t k -τ) ] = ..... = E[X(0 ) ].
et :
C[X(t 1 ,t 2)] = E[X(t 1),X(t 2)*] = [X(t 1 - t 2 ) ,X(0)*] ,
En posant τ = t 1 - t 2 , il vient :
C[X(t 1 ,t 2)] = E[X(t 1),X(t 1 −τ )*] = R X (τ ) .
où R X (τ ) désigne la fonction de corrélation de X(t 1 ,t 2).
Donc, à deux instants t 1 et t 2, la distribution conjointe ne dépend que de l'écart entre les deux
instants et non des instants eux-mêmes :
• Conclusion :
Les moments qui dépendent dans le cas général de l'instant considéré, deviennent
indépendants du temps dans le cas stationnaire. La fonction de covariance C[X (t 1 ,t 2)] devient
quant-à-elle une quantité dépendant uniquement de l'écart entre τ = t 1 - t 2.
• Exemple :
On considère le signal suivant :
X(t,ϕ) = A(ϕ) cos(2π f 0 t) ,

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 75/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
76
où A(ϕ) est une variable gaussienne centrée et de variance 1.
Vérifier que X(t,ϕ) est stationnaire à l'ordre un mais pas à l'ordre deux.
4.2 Ergodisme
Un signal aléatoire stationnaire est dit ergodique si sa moyenne temporelle est égale à samoyenne statistique ( Espérance mathématique), soit :
,(([ dt ,t X T
1 lim ,t X E
T
iT
i ϕ)=ϕ)] ∫ ∞→
où T désigne un ensemble de réalisation de X(t i,ϕ).
L'ergodisme est une propriété très employée en traitement du signal puisqu’elle permet de
calculer les espérances mathématiques en effectuant des moyennes temporelles sur des
réalisations quelconques du signal. Ceci est d'une grande importance pratique, car il est rareque l'on dispose de plusieurs réalisations du processus et de sa distribution de probabilité.
Notons cependant qu'il est au moins aussi rare que l'on dispose de réalisations du signal de -∞à +∞ ; on ne pourra donc pas calculer exactement la valeur des moyennes par la formule
précédente. On se contentera d'approcher le résultat par des moyennes temporelles sur la durée
où est connu une réalisation du processus.
5- Analyse temporelle des signaux aléatoires
Les propriétés énergétiques des signaux aléatoires stationnaires sont décrites à l'aide des
moments d'ordre deux, c'est-à-dire des fonctions d'auto et d'intercorrélation, dans le domainetemporel, et à l'aide des densités spectrales de puissance, dans le domaine spectral.
5.1. Intercorrélation et autocorrélation
a) définition :
Si X(t,ϕ) et Y(t,ϕ) sont deux processus aléatoires stationnaires, les fonctions d'intercorrélation
et d'autocorrélation sont définies par :
R XY (τ ) = E[X(t),Y(t −τ )*] ,(( dt ,t Y ,t X T 1 lim
T T
ϕ)−ϕ)= ∗∞→ ∫ τ
R XX (τ ) = E[X(t),X(t −τ )*] .(( dt ,t X ,t X T
1 lim
T T
ϕ)−ϕ)= ∗
∞→ ∫ τ
Dans le cas discret :
R XY (k) = E[X(n),Y(n− k)*] ,((n
,k nY ,n X N
1 lim
nϕ)−ϕ)= ∗
Ν
0=∞→∑
R XX (k) = E[X(n),X(n− k)*] .((n
,k n X ,n X N
1 lim
nϕ)−ϕ)= ∗
Ν
0=∞→∑

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 76/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
77
b) propriétés :
Les propriétés des fonctions d’autocorrélation et d’intercorrélation sont les mêmes que celles
établies au chapitre précédent dans le cas les signaux déterministes, notamment :
♦ Symétrie hermitienne
RYX (τ ) = E[Y(t,ϕ) X*(t-τ , ϕ) ] = E[Y(t+τ , ϕ) X*(t, ϕ)] = E[X(t, ϕ)Y*(t+τ ,ϕ)]* = R XY *(-τ ).
♦ Parité
En appliquant la propriété de symétrie hermitienne à l'autocorrélation, on obtient :
R XX (τ ) = R XX *(-τ ) .
♦ Centrage
Si m X est la moyenne de X(t,ϕ), et X c(t,ϕ), = X(t,ϕ) - m x le signal centré, il vient :
R XX (τ ) = R XcXc(τ ) + m x2
.
♦ Puissance
La fonction d'autocorrélation prise pour le retard nul, R XX (0), est simplement la puissance du
signal. On en déduit d'ailleurs que R XX (0) > 0. Ainsi pour un retard τ nul, on a :
.,(*,([0(2
dt ) X(t, T
1 limt X )t X E ) R
T T
XX ∫ ϕ=ϕ)],ϕ=∞→
♦ Inégalité de Schwartz
| < x,y > |2 ≤ < x,x > . < y,y > ,
et en utilisant < x,y > = E[ X(t) Y*(t) ] comme produit scalaire, on déduit que :
| RYX (τ )| 2 ≤ R XX (0) RYY (0) et | R XX (τ )| ≤ R XX (0) .
♦ Mémoire
On dit qu’un processus est à mémoire finie si son coefficient de corrélation normalisé ρxx(τ)
tend vers zéro au bout d’un temps t0 . Ce coefficient est compris entre 1 et -1 et est défini par :
.)( (0) R
)( R
XX
XX XX
τ τ ρ =
5.2. Convolution
Le produit de convolution de deux signaux aléatoires est donné par l’expression :

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 77/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
78
.(()(* du ,ut Y ,u X ,t Y X
ϕ)−ϕ)=ϕ)( ∫ Ω
Ω est un domaine de réalisation de X et Y .
a- Propriétés :
•••• Commutativité : [ X*Y](t,ϕ) = [Y* X](t,ϕ) .
•••• Distributivité : [X * ( Y + Z)](t, ϕ) = [(X * Y) + (X * Z](t, ϕ)
•••• Associativité : [X * ( Y * Z )](t) = [(X * Y) * Z](t, ϕ)
•••• Elément neutre : distribution de Dirac δ (t) : X(t, ϕ) * δ (t) = x(t, ϕ) .
b- Réponse à un système linéaire :
Pour un système linéaire H invariant dans le temps (stationnaire),
X(t,ϕ) H Y(t ,ϕ)
Figure 7
que l'on peut décrire par une équation différentielle à coefficients constants, la sortie Y peut
être aussi décrite à partir d’une intégrale de convolution comme :
.(()(*(( duut h ,u X ,t h X ,t Y
)−ϕ)= ϕ) = ϕ) ∫ Ω
h(t) est la réponse impulsionnelle du système H de la figure 1.
Donc la sortie du système linéaire n’est que la convolution de sa réponse impulsionnelle avec
l’entrée.
6- Analyse spectrale des signaux aléatoires
6.1. Densité spectrale d’énergie
On appelle densité spectrale d’un signal aléatoire X(t,ϕ) à énergie finie , le carré du module de
sa transformée de Fourier X(f,ϕ). Elle représente la répartition de l’énergie ou de la puissance
du signal dans le domaine fréquentiel.Ainsi :
S X (f) = | X(f,ϕ)|2
.
D’autre part, la densité spectrale d’énergie est égale aussi à la transformée de Fourier de la
fonction d’autocorrélation du signal.
.(( f d e R f S j
XX -
X τ τ τ π )= ) 2−∞
∞∫

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 78/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
79
• Dans le cas d’un signal aléatoire à puissance moyenne finie, la densité spectrale de
puissance a pour expression :
.(( f d e RT
1 lim f S j
XX
T
0T X
τ τ τ π )= ) 2−
∞→ ∫ 6.2. Energie et puissance d’un signal aléatoire
Dans le cas d’un signal aléatoire stationnaire et ergodique, à énergie finie, l’énergie est
donnée par la relation :
. dt ) X(t, (0) R ]) X(t, E[ E 2
- XX
2
X === ∫ ∞
∞ϕ ϕ
il vient :
.df (f)S (0) R E X - XX X == ∫ ∞
∞
• Dans le cas d’un signal aléatoire à puissance moyenne finie la puissance moyenne est égale à :
.( df f ST
1 lim (0) RP X
T
0T XX X )== ∫ ∞→
7- Exemples de processus aléatoires
7.1. Le processus gaussien
Le processus aléatoire gaussien X(t i ,ϕ) est un signal dont la variable aléatoire ϕ est gaussienne.
Sa densité de probabilité p(x) suit alors une loi gaussienne qui a pour expression :
. e 2
1 p(x)
2
x
x2
2) xm-(x -
σ
π σ =
où :
m x : est la moyenne du processus X(t i ,ϕ) ,
σ x : est la sa variance .
Ainsi, le signal processus gaussien est entièrement caractérisée par ses deux premiers
moments.
Il est très important en traitement du signal en raison de sa facilité d'emploi et de l'optimalité
des méthodes du second ordre pour les signaux gaussiens.
8- Notion de bruit
Les bruits sont des signaux aléatoires rencontrés dans la palupart des signaux observés ou
mesurés dans la nature. Ils s’ajoutent au signal original suite à l’étape de traitement ou aux
conditions de mesure. Ils peuvent déformer l’information utile ou même la masquer
complètement. Parmi ces types de bruits on peut citer à titre d’exemple, le bruit thermique
dans un semi-conducteur ou un élément passif, le bruit dans le signal parole acquis par un
microphone, etc...

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 79/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
80
Comme les signaux aléatoires à puissance moyenne finie, les bruits sont classés selon
leurs propriétés statistiques. On peu distinguer les bruits blancs, colorés et gaussiens.
7-1- bruit blanc
Un bruit blanc est un modèle de signal aléatoire à spectre uniforme et théoriquement à puissance moyenne infinie. Il possède les propriétés suivantes :
! une valeur moyenne nulle,
! une fonction d’autocorrélation qui tend vers la distribution de Dirac,
! un spectre uniforme constant
! Une stationnarité d’ordre 2.
La figure 8 représente le spectre et la fonction d’autocorrélation d’un bruit blanc.
0 100 200 300 400 500 600 700 800 900 1000-0.5
0
0.5
s i g n a l b r u i t
0 100 200 300 400 500 600 700 800 900 10000
10
20
30
s p e c t r e
-1000 -800 -600 -400 -200 0 200 400 600 800 1000-50
0
50
100
a u t o c o r r é
l a t i o n
Fig.8. Bruit blanc
7-2- bruit coloré
Un bruit coloré est un signal aléatoire ayant un spectre à bande limité et à puissance moyenne
finie. Il possède les propriétés suivantes :
! une valeur moyenne nulle,
! une stationnarité à l’ordre 2,
! un spectre à support borné égal à la bande passante du bruit.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 80/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
81
0 100 200 300 400 500 600 700 800 900 1000-0.5
0
0.5
1
b r u i t
c o l o r é
0 100 200 300 400 500 600 700 800 900 10000
5
10
15
20
25
s p e c t r e
Fig. 9 : Bruit coloré de BP=200 Hz et Fréquence centrale Fc=500 Hz

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 81/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
82
EXERCICES CORRIGES DUCHAPITRE 3
♦♦♦♦ Exercice 1
On considère un processus aléatoire gaussien X(t i ,ϕ), de valeur moyenne m x= 0.5 et de
variance σ x2= 2.
a) Calculer et représenter sa densité de probabilité.b) Calculer ses moments d’ordre un et deux.
♦♦♦♦ Exercice 2
On considère le signal aléatoire suivant :
X(t,ϕ) = A(ϕ) cos(2π f o t) ,
où A(ϕ) est une variable gaussienne centrée et de variance 1.
- Vérifier que X(t,ϕ) est stationnaire à l'ordre un mais pas à l'ordre deux.
♦♦♦♦ Exercice 3
Montrer qu’un processus gaussien se conserve par une transformation linéaire .
On prendra pour cela, un système linéaire de réponse impulsionelle h(t), qu’on exitera par un
signal aléatoire gaussien et on montrera que sa sortie est un processu gaussien.
♦♦♦♦ Exercice 4
On considère un signal aléatoire dont la densité de probabilité p(x) est donnée par :
a) Calculer les probabiltés suivantes :
P(x<-2) ; P(x<-1) ; P(x<1) ; P(x<2) ; P(x<1.5) ;P(-1<x<1) .
b) Représenter alors la fonction de répartition F(x).

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 82/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
83
♦♦♦♦ Exercice 5
On considère les deux signaux aléatoires dont les densités de probabilité respectives sont
données par la figure suivante :
x x
a) Calculer les moments statistiques d'ordre 1 et 2
b) Calculer la puissance et la variance des deux signaux.
c) Conclure sur la stationnarité des deux signaux .
♦♦♦♦ Exercice 6
Soit le signal aléatoire x(t) associé à la variable aléatoire φ , ayant une fonction de
répartition F(x) = π -1 arcsin (x) + 0.5
Avec :
x(t) = sin ( 2πFo.t + φ) ,
φ : est un VA uniforme sur [0 2π] .
a) Représenter la fonction de répartition F(x)
b) Calculer et représenter la densité de probabilité p(x)
c) Calculer les moyennes statistiques et temporelles de x(t)
d)
Calculer sa puissance et sa variance .
e) En déduire que x(t) est stationnaire et ergodique .
♦♦♦♦ Exercice 7
Le signal NRZ utilisé en transmission est un signal binaire dont les valeurs sont égales
à 1 ou -1 selon la loi de probabilité suivante: P(1) = 2/3 et P(-1)=1/3 .
a) Calculer l'espérance mathématique, la variance et la puissance de ce signal.
b) Sachant que sa fonction d'autocorrélation R x(τ) = σ2 ∧(τ/T) + m1[x] ,
calculer et représenter la densité spectrale Sx(f).

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 83/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
84
Exercice 8
Quelle est la moyenne de la variable aléatoire de densité de probabilité
Montrer que la fonction de répartition de est :
.- Où se trouve concentrée la densité de probabilité de cette variable.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 84/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
85
Correction des exercicesdu Chapitre 3
♦♦♦♦ Exercice 1
On considère un signal aléatoire dont la densité de probabilité p(x) est donnée par :
x
a) P(x<-2) = 0 ; P(x<-1) = ∫ x p(x) dx = a/2=1/6
P(x<0) = 3a/2=1/2 ; P(x<1) = 5a/2=5/6 ; P(x<2)=3a= 1 ; P(-1<x<1)=2a=2/3 .
P(x<1.5) = a/2 +a +a +3a/8= 23a/8=23/24.
b) la fonction de répartition F(x):
x
x<-2 : F(x) = 0 .
-2<x<-1 F(x) = bx2+cx+d= ax2+(7a/2) x+3a = (1/3) x2+ (7/6) x + 1.
-1<x< 1 F(x) = k x + r = a x +3a/2 = x/3 + 1/2.
1<x< 2 F(x) = e x2+f x+g = -a x2 +(7a/2) x + 0 = (-1/3) x2 + (7/6) x .
x >2 : F(x) = 1 .
♦♦♦♦ Exercice 2
On considère les deux signaux aléatoires dont les densités de probabilité respectives sont
a) les moments statistiques d'ordre 1 et 2 sont donnés par :
E[x] = ∫ x p(x) dx =1/2 ; Px = E[X2] = ∫ x2 p(x) dx = 1/3

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 85/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
86
Vx = σ2 = E[(x- E[x])2] = ∫ (x-0.5)2 p(x) dx = 1/12
On vérifie que : Px = Vx + (E[x])2
et que le signal x(t) est stationnaire puisque m1(x) et m2(x) ne dependent pas du temps
b) E[y] = ∫ y p(y) dy = 1/3 ; Py = E[y2] = ∫ y2 p(y) dy = 1/4
Vx = σ2 = E[(x- E[x])2] = ∫ (x-1/3)2 p(x) dx = 5/36
On vérifie que : Py = Vy + (E[y])2
et que le signal y(t) est stationnaire puisque m1(y) et m2(y) ne dependent pas du temps
♦♦♦♦ Exercice 3
Soit le signal aléatoire x(t) associé à la variable aléatoire φ , ayant une fonction de
répartition F(x) = π -1 arcsin (x) + 0.5
Avec :
x(t) = sin ( 2πFo.t + φ) ,
φ : est un VA uniforme sur [0 2π] .
a) et b) Représentons F(x) et p(x)
c) et f) Calculons les moyennes statistiques et temporelles, puissance et sa variance .
E[x] = ∫ x p(x) dx = 0 ; xmoy = lim (1/T) ∫ x(t) dt = 0
Px = E[X2] = ∫ x2 p(x) dx = (1/π) ∫ [ x2 / √1-x2 ] dx = 1/2
Vx = σ2 = E[(x- E[x])2] = E[X2] = 1/2 car E[X] = 0
On vérifie que : Px = Vx + (E[x])2
f) On vérifie bien que x(t) est stationnaire et ergodique .

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 86/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
87
♦♦♦♦ Exercice 4
Le signal NRZ utilisé en transmission est un signal binaire dont les valeurs sont égales
à 1 ou -1 selon la loi de probabilité suivante: P(1) = 2/3 et P(-1)=1/3 .
a) Calculer l'espérance mathématique, la variance et la puissance de ce signal.
E[x] = ∫ x p(x) dx = xo p(xo) + x1 p(x1) = 1 . 2/3 + -1 . 1/3 = 1/3
; xmoy = lim (1/T) ∫ x(t) dt ≠ 0
Px = E[X2] = xo2 p(xo) + x12 p(x1) = 2/3 + 1/3 = 1 .
Vx = σ2 = E[(x- E[x])2] = 8/9 .
b) Sachant que sa fonction d'autocorrélation R x(τ) = σ2 ∧(τ/T) + m1[x] ,
calculons et représentons la densité spectrale Sx(f).
On sait que Sx(f) = FFT[R xx(τ )] = σ2 T sinc2(πTf) + m12[x] δ (f),

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 87/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
88
Chapit r e I V
Fi l t r age l i n éai r e dessign aux con t in us
1- Définition
Un filtre linéaire est un système linéaire invariant dont la sortie y(t) est le résultat de la
convolution temporelle entre l'entrée x(t) et sa réponse implusionnelle h(t). Pour cette raison, il
est appelé aussi un convolueur temporel. Sa réponse temporelle a pour expression :
y(t) = x(t) * h(t) = ∫ ∞
x(θ ) h(t-θ ) d θ
.∞
x(t) → H → y(t)
Figure 1
Cette dernière relation peut être mise en évidence si on peut approcher l’entrée x(t) par une
fonction en escalier selon figure 2 suivante :x(t)
kT t
Figure 2
On peut dans ce cas faire l’approximation suivante :
kT)-(t x(kT) t xk
T ∑∞
−∞=Π= ,)(~
où ∏ Τ(t ) est la fonction fenêtre de largeur T .
Cette approximation est d'autant plus précise que ( T ) tend vers zéro.
Donc, si T → 0 , alors : ∏Τ(t-kT) → δ (t) et .(t) x t x =)(~

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 88/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
89
posons θ = kT , il vient :
d )-(t ) x( t x
.)( θ θ δ θ ∫ ∞
∞−
=
Si on suppose que y(t) = H[x(t)] est la sortie d'un système linéaire H , pour une entrée x(t), il
vient :
∑∞
−∞==
k
]kT)-(t x(kT) H[ t y ,)(~ δ
]kT)-(t H[ x(kT) t yk
∑∞
−∞== .)(~ δ
soit :
kT)-(t h x(kT) t yk
∑
∞
−∞=
= .)(~
où h(t) désigne la réponse impulsionnelle du système H.
En posant θ =kT , et en faisant T → 0 , il vient :
d )-(t h) x( t y
.)(~ θ θ θ ∫ ∞
∞−
=
Donc, la réponse à une entrée quelconque est la convolution de celle-ci avec la réponse
impulsionnelle du système.
2-Causalité et réalisabilité d'un filtre
2-1- Causalité
Pour les systèmes physiques à variable temporelle, l'effet ne peut jamais précéder la cause qui
le produit. Ainsi la réponse d'un système à l'instant τ ne dépend que de l'excitation pour t < τ.
Donc un système est causal si sa réponse impulsionnelle est nulle ∀ t < 0, ce qui donne
l'expression:
s(t) = e(t) * h(t) = ∫ +∞
e(θ ) h(t-θ ) d θ .
- ∞
Dans ce cas, la sortie ne peut anticiper l'entrée. De plus, si le signal est causal, on obtient :
s(t) = e(t) * h(t) = ∫ t
e(θ ) h(t-θ ) d θ .
o

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 89/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
90
2-2- Stabilité d'un filtre
L’instabilité d’un système physique peut engendrer des comportements non-linéaires ou même
la saturation de sa réponse temporelle et une fragilité de celle-ci vis à vis aux perturbations cequi rend le système incontrôlable et non commandable. Pour cela, il faut avant tout s’assurer
de la stabilité du système et si nécessaire le compenser ou le corriger pour éliminer les pôles
instables.
On rappelle qu’on a défini dans le premier chapitre la stabilité d’un système linéaire
par le fait qu’à toute entrée bornée correspond une sortie bornée. Cela impose que tous les
pôles de la fonction de transfert ou de l’équation caractéristique soient à partie réelle négative.
En effet, si on suppose que la fonction de transfert du filtre linéaire H(p) soit de la
forme :
r
i
is
i2
i
iq
ii
im
i ) p-(p
d + ......+
) p-(p
b +
p- p
a p H ∑∑∑
====
111
)(
. ) p-(p
A
r i
r iq
r
n
i
,
11
∑∑==
=
En appliquant la Transformée de Fourier inverse, on obtient l'expression de la réponse
impulsionnelle suivante :
,e t
1)!-(r
h(t)t p1-r r i,
q
r
n
i
iΑ
= ∑∑== 11
pour que h(t) soit bornée, il faut que l’exponentielle (e p
it ) soit inférieur à l’unité, ce qui
impose que les pôles pi de H(p) soient à partie réelle négative.
• Exemple
Parmi les filtres suivants, les quels qui sont stables.
! p
p p H
++
=1
1)(1 ,
! 1
2)(
22++
= p p
p H ,
! )3)(1(
)(3 −+=
p p
p p H .
Le premier système est stable car son pôle ( po = -1 ) est négatif. Cependant il est à réponse
non minimale de phase car il possède un zéro instable ( zo = 1 ).
Le second système est aussi stable car ses deux pôles complexes conjugués sont à parties
réelles négatives (23
21
1 +−= p et 23
21
2 −−= p ).
Quant au troisième système il est instable car il possède un pôle ( po= +3 ) positif.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 90/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
91
2-3 - Réalisabilité d'un filtre
Par définition, un filtre ou un système linéaire est réalisable s'il est à la fois causal et stable,
donc si:
- sa réponse impulsionnelle est nulle ∀ t < 0 ,
- le degré du numérateur de H(p) est inférieur ou égal au degré de son dénominateur ,
- les pôles de H(p) sont à parties réelles négatives.
• Exemple
Un dérivateur parfait dont la fonction de transfert est H(p)= p, n’est pas réalisable
physiquement car les deux premières conditions ne sont pas satisfaites.
3- Réponse temporelle d'un filtre linéaire invariant
3-1. Réponse impulsionnelle h(t)
Par définition la réponse impulsionnelle d’un filtre linéaire invariant est sa sortie pour une
entrée égale à l'impulsion de Dirac. C'est aussi la transformée de Fourier inverse de la fonction
de transfert du filtre. Son expression est alors :
h(t) = TF -1 [H(f)] = ∫ ∞
H(f) e j2π f t df .
-∞
Pour une entrée quelconque, la sortie du filtre est la convolution de celle-ci avec la réponse
impulsionnelle h(t), soit :
s(t) = e(t) * h(t)
Pour cela, la réponse impulsionnelle qui doit être causale, est une caractéristique temporelle du
système et sa connaissance suffit pour le caractériser ou déterminer ses réponses temporelles.
• Exemple : On considère le filtre passif suivant :
R
e(t) C s(t)
Figure 3
On suppose que la capacité est initialement déchargée.
! Déterminer la fonction de transfert du filtre.
! Calculer et représenter sa réponse impulsionnelle.
La fonction de transfert H(p) du filtre s’écrit :
p RC
p H +
=1
1)( ,
En posant ω c =1/RC, il vient :
j
j H
cω ω ω
+=
1
1)( ,

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 91/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
92
C’est un filtre passe bas de pulsation de coupure ω c =1/RC, et de gain statique unitaire .
! Sa réponse impulsionnelle causale est ( d’après la table):
e RC
t h RC t -1
)( = pour t ≥ 0
h(t) = 0 pour t < 0 .
h(t)
1/RC
0 t
Figure 4
3-2. Réponse à un train d’impulsion ( peigne de Dirac)
La réponse y(t) n’est que la convolution de la réponse impulsionnelle du filtre déjà déterminée
avec la peigne de Dirac, soit :
y(t) = x(t) * h(t) ,
avec :
,kT)-(t x(t)k
δ ∑∞
−∞==
il vient :
. kT)-(t h y(t)k
∑∞
−∞==
Donc la réponse à une peigne de Dirac est une périodisation de la réponse impulsionnelle à
la période T .
• Exemple
Reprenons l’exemple précédent du filtre passe bas de premier ordre et calculons sa réponse
y(t) à un train d’impulsion. L’expression causale de y(t) est :
e RC
y(t) RC
kT -t -
k
1
0
∑∞
== pour t ≥ 0 ,
y(t) = 0 pour t < 0 .
La figure 5 donne une illustration de la réponse du filtre.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 92/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
93
x(t)
0 T 2T t
y(t)
1/RC
0 T 2T t
Figure 5
4- Réponse harmonique d'un filtre linéaire invariant
C'est la réponse du filtre aux signaux exponentiels complexes. Dans ce cas, l'étude de la
réponse harmonique ou fréquentielle revient à l'étude du module et de l'argument de H(f).
x(t) = e j2π f o t → H → y(t) = H(f o) . e
j2π f o t
Figure 6
D’après la figure 6 ci-dessus, le module et l’argument sont donnés respectivement par
|H(f o)| et Arg H(f 0 ) ]. Donc la fonction de transfert qui une représentation externe du système
est la caractéristique du filtre linéaire invariant dans le domaine fréquentiel.
• •• • Exemple :
Soit : x(t) = a cos(2π f ot+ϕ) = 0.5 a e jϕ e j2π F ot
+ 0.5 a e- jϕ e
- j2π F ot
⇒ y(t) = 0.5 a e jϕ H(f o) e j2π f o t + 0.5 a e
- jϕ H(-f o) e- j2π f o t ,
et comme H(-f) = H*(f) , il vient :
y(t) = 2 ℜ e [ 0.5 a H(f o) e j(2π f o t+ϕ)
] ,
⇔ y(t) = a | H(f o) | . cos (2π f 0t + ϕ + arg H(f
0) ]
module argument
• Cas des signaux périodiques :
Pour les signaux périodiques, le raisonnement précédent reste toujours valable seulement la
variable fréquentielle ( fréquence ou pulsation ) est devenue maintenant discrète puisque la
périodisation temporelle conduit à une discrétisation spectrale comme on l’a montré dans ledeuxième chapitre. En effet, si on prend comme entrée du filtre le signal x(t) dont la
transformée de Fourier inverse est :

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 93/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
94
∑∞
∞=
=-k
f t 2 jk
oe X t x
π )( ,
alors, la réponse du filtre est alors:
[ ] [ ] ∑∑ ∞
∞=
∞
∞=
===-k
f t 2 jok
-k
f t 2 jk
oo ekf H X e H X t x H t yπ π )()()(
soit:
Y k = H ( k f 0
) . X k .
• Exemple :
Soit à filtrer le signal fenêtre périodique e(t)= ΣΠ τ (t-k-T o) de largeur τ et de période T o ( τ <<
T o ) par le filtre RC suivant ( RC=0.5 T 0).
R
Ce(t) s(t)
e(t)
t−τ/2 τ/2
a
To 2To
Figure 7 Figure 8
Le signal fenêtre Π τ (t) possède le spectre :
Πτ ( f ) = a τ sinc (τπ f ) .
On en déduit que le signal périodique e(t) de la figure ci-dessus dont le motif
élémentaire est la fonction Πτ(t) est décomposable en série de Fourier et possède le spectre
d'amplitude suivant :
E k =a τ f o sinc (τ π kf o ) ,
donc le signal e(t) s'écrit :
.)( ∑∞
∞==
-k
t f 2 jk e E t e oπ
D’autre part, on sait que la fonction de transfert du filtre H(p) est :
p RC
p H +
=1
1)( ,
et sachant que RC = 0.5T o , alors :
pT
p H o
21
1)(
+= ,
C'est un filtre Passe-bas de fréquence de coupure :
o
cT
1 =
RC 2
1F
π π = .

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 94/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
95
Le signal à la sortie du filtre est donné par :
∑∑∞
∞=
∞
∞===
-k
t kFo j2k k
-k
t kFo j2ok e H E e) H(kF E t s
π π )(
En remplaçant H(kF o) dans cette expression, on aura ( p = j2π f ) :
)arctg(k -= avec j
o e k
= k j
=) H(kF π
π π ϕ
++ϕ
2)(1
1
1
1
Il vient :
,k j
.)F k (sincF a H E S k k k π π τ τ
+ = =
1
100
ainsi le spectre d’amplitude est :
,)F k (sinck
F aS k 02
0
)(1
+ = π τ π
τ
alors que le spectre de phase est :
. )arctg(k -=(k) π ϕ
D’autre part, comme la fréquence de coupure est F c=F o / π , alors :
s t ( ) =∑
X1
1+ j k e car F = 2 Fk
j2 kf t
-
c oo
π
π
2
2
= X1
1- j2e + X
1
1+ j2e + X + X
1
1- je + X
1
1+ je-2
- j4 f t+2
j4 f to -1
- j2 f t+1
- j2 f to o o o
π π π ππ π π π
Connaissant que Xk = X-k alors on sera conduit à la nouvelle expression de la sortie:
y(t)=
T+
Tsinc (
T) [ 2.|
1
1+| cos( t -arctg )]+
Tsinc (
T) [2.|
1
1+4| cos( t -arctg2 )]
o o o o o
a a a
T
a a
T o o
τ τ τπ
ππ
τ τπ
ππ2 2
2 2 2
5- Exemples de filtres
5-1- Filtres idéaux
Ce sont des filtres linéaires invariants définis à partir des gabarits de leurs fonctions de
transfert. Ils sont généralement de type passe-bas, passe-haut, passe-bande et coupe-bande.Malgré la simplicité de leurs traitements, ces filtres sont irréalisables physiquement car leurs
réponses impulsionnelles ne sont pas causales.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 95/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
96
a) filtre cardinal
C’est un filtre linéaire invariant de type passe-bas idéal dont la réponse fréquentielle est la
fonction fenêtre ΠΒ ( f ) de largeur B qui est la bande passante du filtre.
H(f)
1
-B/2 B/2 f
Figure 9
La réponse impulsionnelle de ce filtre cardinal est :
h(t)=B sinc(Bπ t ) .
Figure 10
Figure 10 : Réponse impulsionnelle d’un Passe-Bande idéal
Donc, la réponse impulsionnelle d’un filtre cardinal n’est pas causale, ce qui montre que cetype de filtre n’est pas réalisable.
b) filtre passe-bas idéal
C’est un filtre passe-bas de fréquence de coupure F c et dont la réponse fréquentielle désirée est
donnée par le gabarit de la figure suivante :
|H(f)|
f
F c
Figure 11
-500 -400 -300 -200 -100 0 100 200 300 400 500-0.4
-0.2
0
0.2
0.4
0.6
0.8
1ré ponse impulsionelle du filtre cardinal
fré quence

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 96/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
97
La fonction de transfert de ce filtre n’est que l’échelon de position retourné puis retardé de F c ,
soit :
H(f) = 1- Γ (f- F c ,) .
La réponse impulsionnelle h(t) est égale alors à la transformée de Fourier inverse de H(f), soit :
qui a pour allure, la figure suivante :h(t)
t
Figure 12
Cette réponse impulsionnelle n’est pas causale, donc ce filtre n’est pas réalisable.
c) filtre passe-haut idéal
C’est un filtre passe-haut de fréquence de coupure F c et dont la réponse fréquentielle désirée
est donnée par le gabarit de la figure suivante :
|H(f)|1
f
F c
Figure 13
La fonction de transfert de ce filtre a pour expression :
H(f) = Γ (f- F c ,) .
La réponse impulsionnelle h(t) est égale alors à la transformée de Fourier inverse de H(f), soit :
qui a pour allure, la figure suivante :h(t)
t
Figure 14
h t t ( ) ( )= −δ π
π 1
t e
-2 F t c
h t t ( ) ( )= +1
2
1δ
π π
t e-2 F t c

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 97/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
98
Cette réponse impulsionnelle n’est pas causale, donc ce filtre n’est pas réalisable.
d) filtre passe-bande idéal
C’est un filtre cardinal dont la réponse fréquentielle est la fonction fenêtre ΠΒ ( f-F o) delargeur B qui est la bande passante du filtre.
H(f)
1
f
Fo
F o-B/2 F o+B/2
Figure 15
La réponse impulsionnelle de ce filtre cardinal est :
h(t)=B sinc(Bπ t ) exp(-2π F o t) ,
qui a pour allure, la figure suivante :
Figure 15
Cette réponse impulsionnelle n’est pas causale, donc ce filtre n’est pas réalisable.
d) filtre coupe-bande idéal
C’est un filtre rejecteur de bande idéal qui coupe instantanément toute composante
harmonique dont la fréquence est comprise dans cette passante. La réponse fréquentielle de ce
filtre peut être déduite de la fonction fenêtre ΠΒ ( f-F o) de la manière suivante :
H(f) = 1 - Π Β (f-F o) ,
H(f)
1
f
Fo
F o-B/2 F
o+B/2
Figure 16
-500 -400 -300 -200 -100 0 100 200 300 400 500-4
-2
0
2
4
6
8ré ponse impulsionelle du filtre cardinal
temps

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 98/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
99
On en déduit de ce qui précède que la réponse impulsionnelle de ce filtre est :
h(t)=δ (t) - B sinc(Bπ t ) exp(-2π F o t) ,
Cette réponse impulsionnelle n’est pas causale, donc ce filtre n’est pas réalisable.
5-2- filtre de décalage
C’est un filtre qui réalise la translation temporelle du signal d’entrée. Sa sortie s’écrit :
y(t) = H [x(t)] = x(t-τ ) .
x(t) → H → y(t)
Il vient que sa réponse fréquencielle est :
H(f) = e-j2π f τ
C'est un filtre de gain unité et de phase proportionnelle à la fréquence : ϕ = -2π f τ.C'est un filtre déphaseur pur. Son spectre qui est représenté par la figure ci-dessous n'est pas
borné et le filtre n'est pas réalisable.
H(f) ϕ (f)1
f
f
Figure 18
5-3- filtre dérivateur
C'est un filtre linéaire dont la fonction de transfert est : H(f) = j2π f Sa réponse temporelle y(t) est la dérivée par rapport au temps, de l’entrée x(t) du filtre, soit :
y(t) = dx/dt .
x(t) → H → y(t)
Ce filtre possède une phase constante égale à π/2 et un gain proportionnelle à la fréquence.
|H(f)| = 2π f et ϕ(f)= π/2 .
Cependant, il n'est pas réalisable physiquement car son spectre n’est pas borné.
|H(f)| ϕ (f) π/2
f f
Figure 19

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 99/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
100
5-4- filtre intégrateur
C’est un filtre dont la sortie temporelle y(t) est l’intégrale de l’entrée x(t) du filtre, soit :
Sa fonction de transfert est de la forme:
H(f) = 1/ j2π f Il possède une phase constante égale à -π/2 et un gain inversement proportionnel à la
fréquence.
|H(f)| = 1/2π f et ϕ(f)= −π/2 .
|H(f)| ϕ (f)
f
f
-π/2
Figure 20
Ce filtre est réalisable physiquement puisque son spectre d’amplitude | H(f)| tend vers (-
∞) donc vers zéro en dB, ce qui permet de le majorer par une borne supérieure. Un intégrateur
réalise la fonction de filtrage passe-bas une fois associé à une action proportionnelle.
5-5- filtre quadrateur
C'est un filtre non linéaire dont la sortie est le carré de l'entrée du filtre.
x(t) → H → y(t) = x2(t)
Ce filtre est appelé aussi intermodulateur car il réalise l'intermodulation de fréquences.
• Exemple :
Soit le signal sinusoïdal suivant : x(t) = a cos (2π f 0 t ) .
Calculons sa réponse spectrale Y(f) :
x(t) = a cos (2π f 0 t ) ⇒ Y(f) = X(f) * X(f) ,
⇔ Y(f) = ∫ ∞
X( ν) . X(f- ν) d ν ,
-∞
or X(f) =1
2a δ (f - f o) +
1
2a δ (f + f o)
⇔
Y f =a
+a
+a
2 2 2
2 2− o o
y t t ( ) ( )=∞
∫ x dt
0

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 100/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
101
Le filtre introduit des produits d'intermodulation qui augmentent le taux de distorsion
du signal de sortie.
♦ Retrouvons ce résultat par décomposition trigonométrique de y(t) , en fait :
y(t) = x2(t) = a
2cos
2(2π f 0 t ) ,
soit encore :
y(t) = 0.5 a2
[ 1+ cos(4π f 0 t )] .
La décomposition spectrale de y(t) sera donc :
Y(f) = 0.5 a2
[ δ (f)+1
2 δ (f - 2f o) +
1
2 δ (f +2 f o )],
alors :
Y(f) = 0.5 a2
[δ (f) +1
2 δ (f - 2f o) +
1
2 δ (f +2 f o )],
Y(f)
-2Fo 0 2Fo f
Figure 21
5-6- filtre limiteur d'amplitude
C’est un filtre non linéaire qui réalise un ecrétage du gain en bande passante et non pas
l’écrêtage du signal du sortie. Le schéma synoptique correspondant est le suivant:
limiteur Filtre
pass-bande
x(t) z(t)= sgn[x(t)]y(t)
H(f)
f fo
Figure 22
soit x(t) = A(t) cos (2 π f o t + φ )
⇒ y t ( ) =4
cos (2 f t + )oπ π φ

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 101/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
102
5-7- filtre démodulateur ou détecteur d'enveloppe
C’est un filtre non linéaire qui permet de détecter la variation de l’amplitude d’un signal
dynamique. Il peut être réalisé par un redresseur double alternance suivi d’un filtre passe-bas.
x(t) → redresseur double alternance → filtre PB → y(t)
Figure 23
• Exemple :
Soit le signal sinusoïdal d’entrée suivant :
x(t) = A(t) cos( 2π f o t + ϕ ) ⇒ y(t) = 2 A(t) / π .
En effet, le redressement double alternance donne le signal x1(t) défini par :
x1(t) = A(t) | cos(2π f 0 t+ϕ) | .
Le signal x1(t) est périodique de période 2T o, alors le développement en série de Fourier de
x1(t) permet d’écrire : ∞
x1(t) = A(t) Σ Xk e j4πkfo t
k=-∞
⇒ X1(f) = A(f) * [ Xo δ(f) + Σ Xk δ(f - 2kf o) ]
k ≠0
Or la valeur moyenne Xo = 2/π
⇒ X (f ) =2
A(f ) + X . A(f - 2kf )1
k 0
k oπ ≠
∞∑
Le filtre passe-bas ne permet de laisser que la quantité 2A(t)/ π ,ce qui donne le signal de
sortie :
y(t) =2
A(t)π
.
Ce signal n’est que l’amplitude recherchée A(t) au facteur 2/π près .
6- Distorsions linéaires et non linéaires des filtres
Généralement un filtre modifie l'amplitude et la phase du signal sinusoïdal d'excitation en
fonction de la fréquence. Cette distorsion est indésirable dans les applications de transmission.
Pour cela, on cherche à utiliser des filtres sans distorsion ayant un gain et un retard
constants dans la bande passante désirée .
6-1. Filtre sans distorsion
Il possède une fonction de transfert dans la bande passante ayant pour expression :
H(f) = A exp(-j2πf το)

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 102/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
103
H(f)
f -fc
A
fc
Figure 24
A : gain constant
τo = retard.
C'est donc un filtre amplificateur à retard pur dont la sortie est :
y(t) = A x (t - τ o)
On peut citer des exemples de ces filtres sans distorsion tels que les filtres idéaux PB, PH, …
6-2 - Filtre avec distorsion
Il s'agit des filtres réels dont la réalisabilité et la synthèse sont possibles grâce à leurs
propriétés spectrales ( spectre borné ) et temporelles ( réponse impulsionnelle causale ).
Malheureusement, ces filtres possèdent des spectres d’amplitude et de phase non linéaires et
introduisent par conséquent
des ondulations du gain en bande passante et des distorsions harmoniques qui modifient les
propriétés énergétiques du signal.
Les ondulations inévitables sont tolérées par des approches de synthèse tels que celles
de Butterworth, Tchebychelf, elliptique, qui donnent une approximation de la distorsion
admissible dans la bande passante. On peut ainsi rencontrer outre les filtres à distorsion
d'amplitude, les filtres à distorsion de phase où celle-ci n'est plus linéaire dans la bande
passante.
• Exemple :
- distorsion d’amplitude :
H f
F c
( )
)
= A
1+ (f 2
|H(f)|
f
Figure 25
- distorsion de phase :
ϕ ( ) ( ) f arctg f
F c= −

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 103/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
104
ϕ(f)
f
Figure 26
6-3 - Distorsion harmonique et distorsion d'intermodulation
C'est le résultat du filtrage avec distorsion ou un filtrage non linéaire. En effet :
- La distorsion harmonique est dûe à la présence des harmoniques du fondamental en
cas d'excitation d'un signal sinusoïdal.
- La distorsion d'intermodulation est dûe à la présence de composantes sinusoidales
pour une excitation en somme de sinusoïdes (filtre multiplicateur, filtre quadrateur).• Exemple :
- Soit le filtre non linéaire suivant :
x(t) → X → y(t) = 2x(t)+ x2(t)
et montrons l’effet des distorsions harmoniques et d’intermodulation sur le spectre du signal
de sortie du filtre .
- distorsion harmonique : x(t) = a cos (2π f o t) ,
y(t) = 2x(t)+ x2(t) = 2 a cos (2π f o t) + a2
cos2(2π f o t) ,
⇒ Y(f) = a[δ (f-f o)+δ (f+f o)]+0.5 a2δ (f) +0.25 a
2[δ (f-2f o)+ δ (f-2f o)]
Y(f)
-2fo -fo 0 fo 2fo f
Figure 27
- distorsion d’intermodulation
x(t) = a1 cos (2π f 1 t) + a2 cos (2π f 2 t ),
⇒ Y(f) = a1[δ (f-f 1)+δ (f+f 1)]+ a2[δ (f-f 2)+δ (f+f 2)]+0.5 (a12+a2
2)δ (f) +0.25 a1
2[δ (f-2f 1)+ δ (f-2f 1)]
+0.25 a22[δ (f-2f 2)+ δ (f-2f 2)]+ 0.5 a1
a2
[δ (f-f 1 -f 2)+δ (f+f 1 +f 2) +δ (f-f 1 +f 2)+ δ (f+f 1 -f 2)] .
On remarque que le spectre de Y(f) est très riche en harmoniques qui risquent d’augmenter le
taux de distorsion du signal

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 104/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
105
0 f2-f1 2f1 f1+f2 2f2-2f2 -f1-f2 -2f1 f1-f2
H(f)
f
Figure 28
7- Filtrage des signaux d'énergie finie et de signaux de puissance moyenne finie
7-1. Cas des signaux à énergie finie
Pour un filtre linéaire invariant ayant une fonction de transfert H(f) ,
x(t) → H(f) → y(t)
la densité spectrale d'énergie du signal de sortie y(t) est donnée par :
S y(f) = |H(f)|2
S x(f)
Donc, le filtrage d'un signal d'énergie finie ne donne pas forcement un signal à énergie
finie
• Exemple :
Soit à filtrer le signal triangle Λ2T (t) par un filtre intégrateur pur. Le spectre du signal de sortie
a donc comme expression :
Y f ( ) =1
T sinc ( fT)2
j2ππ
f
sa densité spectrale est :
S f y ( ) =T
sinc ( f T )2
4
4ππ2
f 2 .
On en déduit l’énergie :
E S f T
f y y= =
−∞
∞
−∞
∞
∫ ∫
4df sinc ( Tf) df ( )
2
24π2 π
7-2 Cas des signaux de puissance moyenne finie
Le filtrage d'un signal de puissance moyenne finie ne donne pas nécessairement un signal de
même type. La densité spectrale d'énergie du signal de sortie y(t) du filtre est donnée par :
S y(f) = |H(f)|2
S x(f)
7-3- cas des signaux analytiques
Soient les signaux analytiques suivants:
Y(f)

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 105/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
106
x(t) → signal analytique: xa (t)
h(t) → signal analytique ha(t)
y(t) → signal analytique ya(t)
et on se propose de filtrer le signal x(t) par un filtre linéaire invariant H dont la sortie y(t)
possède le spectre suivant :
Y(f) = H(f) X(f) ,
or Y a(f) = 2 Γ (f) Y(f) = 2 Γ (f) H(f) X(f)
avec Γ : l'échelon de position unitaire
il vient :
Y a(f) =1
2[ 2 Γ (f) X (f) ] . [ 2 Γ (f) H(f) ] =
1
2X a(f) . H a(f),
Il résulte : ya(t) =1
2xa(t). ha(t) .
8- Les fenêtres de troncature
Nous avons vu que la plupart des filtres idéaux et cardinaux ont deux inconvénients, d’une
part ils sont irréalisables physiquement et d’autre part, ils peuvent donner lieu à des
ondulations d’amplitude dans l’autre domaine de traitement.
A titre d’exemple, le filtre cardinal passe-bande ( fonction fenêtre fréquentielle de
largeur de bande passante B = 2Fc ), excité par un signal d’entrée x(t) en train d’impulsions
donne un signal de sortie y(t) ondulé et distordu comme le montre la figure 29 malgré que le
signal x(t) ne l’est pas. Cela en raison du spectre d’amplitude du filtre |H(f)| qui est en sinus
cardinal et donc fortement ondulé. Ce qui confirme la remarque du paragraphe précédentsuivante :
“ le filtrage d"un signal par un filtre linéaire invariant ne donne pas forcément le
même type et classe du signal ; la fonction de transfert du filtre et son spectre sont très
déterminantes dans ce cas ” .x(t)= ⊥T (t)
x(t) y(t)
0 T t
y(t)=(2F c /T) Σ sinc[2π Fc(t-kT -1
)]
H(f)= Π 2Fc(f)
1
-Fc Fc f - t t
Figure 29
8-1- troncature temporelle
On vient de voir donc un résultat très important en traitement du signal, c’est que le filtrage
fréquentiel d’un signal peut modifier non seulement les paramètres énergétiques et spectrales
H(f)

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 106/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
107
du signal mais aussi son allure temporelle et sa forme ce qui le rend parfois unitilisable ou non
adapté à son application. Cette remarque est valable aussi pour la troncature temporelle (
multiplication temporelle qui se traduit par une convolution fréquencielle ) lorsqu’on est
obligé de faire un traitement sur une partie du signal ou de limiter l’étendue d’un signal en
raison de la capacité de la mémoire du calculateur ( on ne peut pas programmer ou acquérir un
signal variant de moins l’infini à l’infini ) . Par exemple lorsqu’on désire calculer la valeur moyenne d’un signal périodique, on est obligé d’appliquer une fenêtre de troncature
rectangulaire de largeur la période du signal sur laquelle on effectuera les traitements. De
même si on veut stocker les valeurs d’un signal échelon, on devrait aussi le tronquer sur une
partie temporelle. Cependant cette opération crée des ondulations spectrales importantes qui
risquent de modifier le contenu énergétique du signal ( puissance, énergie, taux de
distorsion,.. ).
Les figures 30 et 31 suivantes donnent un exemple de l’effet de la troncature
temporelle d’un signal sinusoïdal sur le domaine spectral.
Figure 30. Spectre du signal sinusoidal
Figure 33 : spectre du signal sinusoidal avec troncature
Figure 31. Spectre du signal sinusoidal tronqué par une fenêtre rectangulaire
-5 -4 -3 -2 -1 0 1 2 3 4 5-1
-0.5
0
0.5
1
0 10 20 30 40 50 60 70 800
10
20
30
40
50spectre du signal sinusoidal
frequence
-5 -4 -3 -2 -1 0 1 2 3 4 5-1
-0.5
0
0.5
1
0 10 20 30 40 50 60 70 80 900
5
10
15
20spectre du signal tronqué
frequence

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 107/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
108
En conclusion :
• Si on fait un traitement ( filtrage fréquentiel ou temporel ) dans un domaine donné (
temporel ou fréquenciel ), on devra se méfier des résultats et des conséquences sur l’autre
domaine,
• Il faut bien choisir le type de la fenêtre de troncature ou le type du filtre car ce sont ces
éléments qui influent sur les qualités et les paramètres du signal désiré.
8-2- les différents types de fenêtres
Nous venons de voir que la fenêtre rectangulaire provoque des ondulations spectrales. Pour
diminuer et atténuer celles-ci, on utilise d’autres fenêtres de troncature.
a) fenêtre triangulaire Λ2T (t) :
Cette fenêtre présente une distorsion spectrale moins importante que celle de la fenêtre
rectangulaire. Elle a pour expression :
x t T
( ) = −1t
,
alors que son spectre est donné par :
X(f)= T sinc2(π Tf) .
X(f)= Tsinc2(π Tf)
x(t)=Λ2T (t)
1 T
-T T t f
Figure 32 : fenêtre triangulaire
b) fenêtre de Bartlett: Cette fenêtre est aussi de type triangulaire
Figure 33
0 50 100 150 200 250 3000
0.2
0.4
0.6
0.8
1fenetre de Bartlett
-30 -25 -20 -15 -10 -5 0 5 10 15 200
50
100
150spectre de la fenetre de Bartlett
frequence

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 108/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
109
c) fenêtre de Blackman:
Cette fenêtre en cosinus présente une distorsion spectrale moins importante que celle des deux
fenêtres précédentes. Elle a pour expression :
w(t) = 0.42 - 0 .5 cos(2π t) + 0.08 cos(4π t ) ,
d) fenêtre de Hanning
Figure 34
Cette fenêtre présente a pour expression :
w(t) = 0.42 - 0 .5 cos(2π t/T) + 0.08 cos(4π t/T ) .
e) fenêtre de Hamming
Cette fenêtre présente a pour expression :
w(t) = 0.54 - 0 .46 cos(2π t/T) .
La figure 28 donne une représentation temporelle des différentes fenêtres couramment
utilisées.
0 50 100 150 200 250 3000
0.2
0.4
0.6
0.8
1fenetre de Hanning
0 50 100 150 200 250 3000
50
100
150
frequence
spectre de la fenetre de Hanning

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 109/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
110
Figure 37
Figure 35 : fenêtres de troncature
La programmation en Matlab de ces différents types de fenêtres est donné par le programme
suivant :
w1 = (.42 - .5*cos(2*pi*(0:n-1)/(n-1)) + .08*cos(4*pi*(0:n-1)/(n-1)))'; % blackman
w2 = .5*(1 - cos(2*pi*(1:n)'/(n+1))); % Hann
w3 = .54 - .46*cos(2*pi*(0:n-1)'/(n-1)); % Hamming
w4 = 2*(0:(n-1)/2)/(n-1); % Bartlett.
La figure 36 donne les résultats de simulation des réponses temporelles de chacune des
fenêtres présentées.
-150 -100 -50 0 50 100 1500
0.2
0.4
0.6
0.8
1
1.2
1.4les fenetres de troncature
temps
Hann
Bartlett
rectangulaire
Hamming

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 110/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
111
1) Fenêtre rectangulaire: w(t)=1 pourt1<t<t2 et w(t)=0 ailleurs
w(t)
t2) Fenêtre triangulaire : w(t) = 1 - |t|/ τ
3) Fenêtre de hamming : w(t) = 0.54-0.46*cos(2*pi*t)
4)Fenêtre de Blackman : w(t)=0.42-0.5*cos(2*pi*t)+0.08*cos(4*pi*t)
5) Fenêtre de hann : w(t) = 0.5*[1-cos(2*pi*t)]
Figure 38: Les fenêtres de troncature.
Figure 36 : Evolution temporelle des fenêtres de troncature
ConclusionLa troncature temporelle se traduit par un élargissement et une ondulation spectrale. Pour
remédier à cet inconvénient on choisit es fenêtres de troncature de type Hann ou de Hamming.
0 50 100 150 200 250 3000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 50 100 150 200 250 3000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 50 100 150 200 250 3000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 50 100 150 20 0 250 3000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 111/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
112
Annexe
SIMULATION PARMATLAB
1) PRESENTATION DU LOGICIEL MATLAB
Le logiciel MATLAB ( MATrix LABoratory ) est outil de simulation mathématique
puissant, utilisé en Automatique et en Traitement du signal pour le traitement des donnés,
l'analyse spectral, l'identification et la commande des systèmes linéaires continus et discrets.
Il utilise les mêmes outils mathématiques développés dans le cours ainsi que des logiciels
numérique pour le calcul, le traitement et la résolution des équations régissant le système
(Algorithme de Newton, Runge-Katta, RLS, MCO,...).
Le logiciel comporte plusieurs thèmes d'étude appelées TOOLBOX dont les plus
utilisés sont les suivants :- Traitement de signal
- télécommunications
- Identification
- Commande.
- Optimisation
etc…
La souplesse du logiciel réside par le fait qu'il s'adapte aux différentes représentations
possibles des systèmes (rep. par Equation d'Etat, par Fonction de Transfert., par Equation
différentielle...) et aux différentes méthodes d'identification. Les résultats (valeurs et courbes)
peuvent être stockés sur un fichier extérieur dont l'extension doit être du type (nom fichier.mat).
2) INITIATION AUX COMMANDES ESSENTIELLES DE MATLAB
1- Représentation par la fonction de transfert (F.T.)
Soit la F.T. d'un Système linéaire:
H(p) = bo+b p+...+b .p
ao+a p+...+a p
1 qq
n
n
1
= N(p)
D(p)
La représentation polynomiale du numérateur et du dénominateur est donnée par les vecteurs :

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 112/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
113
NUM = [ bq bq-1 ... b1 bo ]
DEN = [ an an-1... a1 ao ]
a) Calcul des pôles de H(p) :
Cela revient à calculer les racines de D(p). La commande est la suivante :
roots (DEN)
b) Passage de la F.T. à la représentation ZERO-POLE
Si on veut connaître le gain statique K, les zéros Zi et les pôles Pi de la F.T. H(p), on
peut exécuter la commande suivante :
[ Z, p, K] = tf2ZP (NUM, DEN)
2- Représentation temporelle
a) Réponse impulsionnelle h(t) = TL-1 [ H(p) ]
La commande est la suivante :
IMPPULSE ( NUM, DEN , t )
où NUM ET DEN représentent les vecteurs relatifs ou numérateur et au dénominateur de la
F.T.t : étant la variable temporelle et dont la plage de variation doit être spécifié précédemment.
Soit par exemple ;
t = 0 : pas : tmax
b) Réponse indicielle
C'est la réponse à un échelon unitaire la commande est la suivante :
Y = STEP (NUM, DEN,t)
c) Réponse à une entrée arbitraire
Si l'entrée U du système linéaire continu est quelconque, celle-ci doit être définie
comme fonction ou comme suite de valeurs. La commande est la suivante :
Y = LSIM (NUM, DEN, U, t)
3°) Représentation fréquentielle
a) Diagramme de Nyquist
[ Re , Im] = NYQUIST (NUM, DEN, w)
w : étant la pulsation et dont la plage de variation doit être spécifié à l'avance.

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 113/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
114
par exemple :
w=logspace(-2,1,1000)
⇒ 1000 valeurs de W variant entre 10-2 et 10+1
a) Diagrammes de BODE
[Mag, Phas] = BODE (NUM, DEN, w)
En décibels on peut écrire : Mag db = 20* Log 10 (Mag) .
La représentation dans le plan de Black peut être déduite par la commande suivante :
SEMILOGx (phas, mag)
3- IDENTIFICATION ET SIMULATION
3-1. Simulation d’un système linéarie :
On considère le système suivant A(q).y(t) = B(a) u(t-d)+C(q) e(t)
avec u : entrée ; d : retard
e : bruit ; y : sortie
La commande sera : TH = mktheta (A,B,C) ;
Y = Idsim ([u e],TH) ;
3-2. Estimation des paramètres du modèle
A l’aide des séries de mesures entrées/sorties effectuées sur le système à identifier on
désire déterminer les paramètres du modèle selon :
Z = [y,u] ;
n = [nA, nB , nC d] ;
TH = ARMAX (Z,n) ; % modèle du type ARMAXTH = IVA (Z,n) ; % erreur de modélisation
(Z0, P0,K0) = ZP (Th) ; % pôles et zéros du modèle
[A,B,C] = polyform (th) ; % forme polynomiale du modèle
3-3. recherche du modèle continu
On considère un modèle TH déjà recherché selon une méthode numérique. Les
numérateur et dénominateur sont donnés par :
[Num,Den] = CONT(TH) ;

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 114/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
115
3-4. Simulation à une entrée arbitraire
* en continu : y = LSIM (A,B,C,D,u,t)
ou y = LSIM (Num,Den,u,t)
* en discret : y = DLSIM (Num,Den,u)
3-5. Opérations matricielles
* Diagonalisation B = diag (A)
* Triangularisation C = Triu (A)
4- ANALYSE SPECTRALE
4-1. FFT d’un vecteur :
Les échantillons ( points ) sont au nombre = 2 No
où No = nombre de bits du CAN.
Les commandes sont :
Y = FFT (X,No) ; % ou encore FFT(X)
PXX = X.* conj(X)/No ; % densité spectrale de x
PXY = Y.* conj(X)/No ; % densité interspectrale
TYX = PXY/PXX ; % fonction de transfert
FXX = IFFT(PXX) ; % fonction d’autocorrelation = FFT-1 (PXX)
CX = Cov(X) ; % matrice de covariance de XRX = CORR(X) ; % matrice de correlation de X
4-2. Génération d’un bruit
RAND (‘ normal’) ; % loi normale
RAND(‘ uniform’) ; % loi uniforme
e1 = rand (100,1) ;
e2 = rand (100,1) ; % vecteurs bruit à 100 points avec amplitude = 1
plot (e1,e2) ; % représentation graphique des bruits
4-3. Statistiques :
On considère toujours un vecteur X
MEDIAN (X) ; % valeur moyenne
STD (X) ; % écart type
MAX (X) ; % valeur maximale de X
MIN (X) ; % valeur minimale de X
4-4. Fenêtres de troncature
HAMMING (M) ; % M est la largeur de fenêtre
HANNING (M) ;
BOXCAR (M) ; % fenêtre rectangulaire

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 115/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
116
BARTELETT (M) ; % fenêtre triangulaire
BLACKMAN (M) ; % fenêtre exponentielle
4-5. Analyse à partir d’un modèle de représentation
Soit un modèle déterminé par un alogarithme d’identification et les mesures E/S
Z = [Y U] ;
n = [nA nB nc d] ;
TH = ARMAX (Z,n) ; % modèle identifié[G,Fi] = SPA (Z,M,w,No,To) ; % To est la période d’échantillon
ou encore = TRF (TH) ;
5- PROCEDURES GRAPHIQUES ET GESTION DE FICHIERS
5-1. représentation d’une fonction : y = sin(t)
t = 0 : 0.1 : 20 ;
y = sin (t) ;
plot (t,y) ; pause ; % dessin et maintien su écran
title (‘ Fonction sinus’) ; % titre
xlabel (‘ temps ‘) ; % axe des abscisses
ylabel (‘ y en sec’) ;
PRINT % impression de l’écran
5-2. sauvegarde des fichiers
SAVE Adnen Y1 , Y2
% sauvegarde des vecteurs y1, y2 dans le fichier Adnen
LOAD Adnen Y1 % restitution du vecteur y1
6- FILTRAGE NUMERIQUE
On désire filtrer une suite d’entrée X par un filtre dont la FT est donnée par :
H(z) =B(z)
A(z)
La commande est : Y = FILTER (B,A,X)
6-1. Conception des filtres RIF numériques
a. Méthode directe par gabarit :
[B,A] = YULEWALK (n,freq,Mag) ; % H = B(z)A(z)

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 116/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
117
f : étant la fréquence normalisée = f x/f o/2 = 2f x/f o
M : Gabarit du filtre désiré sous forme vecteur
n : ordre du filtre.
Il s’agit de concevoir un filtre RII d’ordre N dont le gabarit de la reponse frequentielle est
donnée par Freq et Mag. Les coefficients du filtre sont donnés par B and A.
Ou encore :
B = FIR2(N,Freq,Mag) concoit un RIF d’ordre N .
Exemple :
M = [ 0 0 1 1 0 0 ] ;
f = [ 0 0.2 0.4 0.6 0.8 1] ; pi=3.14 ;
[B,A] = yulewalk (4, f, M) ;
[H,W] = freqz (B, A, 128) ;
plot (f, M, w/pi, abs (H)] ) ;
b. Méthode à fenêtres
B = FIR1 (n , wo, Hanning) ; % wo : fréquence de coupure
n : ordre du filtre
avec B = b(0) + b(1) z-1 +... b(n) z-n
c. au sens de Butterworth
[B,A] = BUTTER (n, w p) % n : ordre du filtre% w p : sa bande passante
Y = FILTER (B, A,[1 zéros(1,50)] ) % rép. impulsinuelle du filtre
plot (Y) ; pause ;
Exemple :
[B,A] = BUTTER(N,wn,'high') desige un filtre passe haut.
[B,A] = BUTTER(N,Wn,'stop') : concoit un filtre passe Bande de bande passante :
Wn = [W1 W2].
Wn est en valeur relative ( entre 0 et 1 ) par rapport à frequence de Nyquist ( Fech/2)
d.- au sens de Tchebycheff
[N, Wn] = CHEB2ORD(Wp, Ws, Rp, Rs) : concoit un filtre RII d’ordre N ayant :
Rp : attenuation max en bande passante
Rs atténuation à la pulsation Ws.
% Lowpass: Wp = .1, Ws = .2
% Highpass: Wp = .2, Ws = .1
% Bandpass: Wp = [.1 .8], Ws = [.2 .7]
% Bandstop: Wp = [.2 .7], Ws = [.1 .8]

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 117/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
118
e- elliptique
[B,A] = ELLIP(N,Rp,Rs,Wn,'high') désigne un filtre elliptique passe haut d’ordre N.
[B,A] = ELLIP(N,Rp,Rs,Wn,'stop') : passe bande avec : Wn = [W1 W2].
6-3 - réponse fréquentielle
[h,w] = freqs(b,a)
ou H = FREQS(B,A,W) réponse fréquentielle H du filtre analogique de numérateur et
dénominateur B et A:
[H,F] = FREQZ(B,A,N,Fech)
réponse fréquentielle H du filtre numérique de numérateur et dénominateur B et A
7- Représentation temps-fréquence
B = SPECGRAM(A,NFFT,Fs,WINDOW)Ou
B=SPECGRAM(A).

5/16/2018 Adnen Cours TSA - slidepdf.com
http://slidepdf.com/reader/full/adnen-cours-tsa 118/118
Cours et exercices de traitement du Signal - CHERIF Adnene – FST 2003
__________________________________________________________________________________
119
BIBLIOGRAPHIE
.
1
Théorie du signal et Transmission de l'information J.DupazCollection
EYROLLES
2
Symboles, signaux et bruits
Pierce MASSON
3
Traitement numérique du signal
Van Der Enden MASSON
4Méthodes et techniques de traitement du signal
J.M Lacoume MASSON
5Codage et Traitement du signal
Wade J.G MASSON
6
Traitement du signal
Patric DUVAT DUNOD
7
Traitement numérique des signaux
M KUNT HERMES
8
Systèmes et asservissements linéaires échantillonnés
Yves SEVELY DUNOD
9
Eléments de théorie du signal
B PICINBONO DUNOD
10
Codage et traitement du signal
WADE J.G MASSON
11 Traitement du signal COULON F PPR
12Automatique des Systèmes linéaires Ph. Larminat FLAMARION