Activité 1 - Pages mathématiques pour le...
15
266 n Chapitre 11 n Produit scalaire © éditions Belin, 2012. Produit scalaire 11 Ouverture Ce chapitre est la suite de celui de première dans le plan. Le prolongement à l’espace est artificiel puisque de toute façon pour calculer le produit scalaire de deux vecteurs dans l’espace, on va utiliser un plan les contenant tous les deux, ou plutôt contenant deux représentants, ce qui est donc toujours possible. En revanche, cela permet de compléter le chapitre précédent sur la géomé- trie vectorielle dans l’espace. On pourra reformuler la question de la manière suivante : quelle relation peut-on déduire entre la valeur du travail et le mouvement rectiligne uniforme ? Réponse à la question O M(t) R au t au n Un point matériel en mouvement circulaire uni- forme a pour trajectoire un cercle de rayon R. Pour décrire ce mouvement on utilise le repère de Frénet comportant les vecteurs unitaires u t , tan- gent à la trajectoire du point en M, dans le sens du mouvement, et r u n , orthogonal à la trajectoire du point en M, vers le centre du cercle O. Un petit déplacement du r du point se fait le long du vec- teur tangent r r r u du duu t t = ( ) . La force centripète est proportionnelle à l’accélération centripète : r r a v R u n = 2 . Le travail de la force centripète est nul tout au long de la trajectoire circulaire car le vec- teur du déplacement et le vecteur de la force sont perpendiculaires (cos( , ) r r µ u u t n = 0). Le travail d’une force est responsable de la varia- tion de l’énergie cinétique du système qui subit cette force. S’il est nul, cela veut dire que la force ne change pas l’énergie cinétique du système. Par conséquent, la force centripète ne change pas la norme du vecteur vitesse du point, mais elle modifie sa direction. En effet, si la force n’était pas présente, le point cesserait son mouvement circulaire et se déplacerait en mouvement recti- ligne uniforme le long de r u t , conformément à la 1 re loi de Newton. Suivant cette loi, dans les référentiels galiléens, un point matériel est soit au repos soit en mou- vement rectiligne uniforme. Autrement dit, s’il n’y a pas de force s’exerçant sur un corps (corps isolé), ou si la somme des forces (force résul- tante) s’exerçant sur lui est égale au vecteur nul (corps pseudo-isolé), la direction et la norme de sa vitesse ne changent pas (mouvement recti- ligne uniforme). La force résultante étant égale au vecteur nul, son travail est nul. Cependant, cela ne veut pas dire que si le travail est nul alors la force résultante est nulle et que le point est en mouvement rectiligne uniforme. Vérifier ses acquis 1 1. a. 2. b. 3. c. 4. a. 2 1. b. 2. d. 3. b. 4. d. 3 1. c. 2. d. 3. a. 4. d. 4 1. b. 2. a. 3. b. 4. b. 5 1. b. 2. b. 3. b. 4. b. 5. c. 6. b. 7. b. Activités d’introduction Activité 1 L’objectif de cette activité est de faire découvrir le produit scalaire dans l’espace. 1 a. Le plan (ABF) qui passe aussi par E. b. AB AF AB ur uu ur u × = = 2 2 a . 2 a. AC AG AC ur uu ur uu × = = 2 2 2a . b. CG BH BF BH BF ur uu ur u ur u ur u × = × = = 2 2 a .
Transcript of Activité 1 - Pages mathématiques pour le...

266 n Chapitre 11 n Produit scalaire
© é
diti
ons
Belin
, 201
2.
Produit scalaire11
OuvertureCe chapitre est la suite de celui de première dans le plan. Le prolongement à l’espace est artificiel puisque de toute façon pour calculer le produit scalaire de deux vecteurs dans l’espace, on va utiliser un plan les contenant tous les deux, ou plutôt contenant deux représentants, ce qui est donc toujours possible. En revanche, cela permet de compléter le chapitre précédent sur la géomé-trie vectorielle dans l’espace.On pourra reformuler la question de la manière suivante : quelle relation peut-on déduire entre la valeur du travail et le mouvement rectiligne uniforme ?
Réponse à la question
O
M(t)
R
aut
aun
Un point matériel en mouvement circulaire uni-forme a pour trajectoire un cercle de rayon R. Pour décrire ce mouvement on utilise le repère de Frénet comportant les vecteurs unitaires ut, tan-gent à la trajectoire du point en M, dans le sens du mouvement, et
r
un, orthogonal à la trajectoire du point en M, vers le centre du cercle O. Un petit déplacement du
r
du point se fait le long du vec-teur tangent
r r r
u du duut t�� �. La force centripète
est proportionnelle à l’accélération centripète : r r
avR
un�2
. Le travail de la force centripète est nul
tout au long de la trajectoire circulaire car le vec-teur du déplacement et le vecteur de la force sont perpendiculaires (cos( , )
r r
�u ut n � 0).Le travail d’une force est responsable de la varia-tion de l’énergie cinétique du système qui subit
cette force. S’il est nul, cela veut dire que la force ne change pas l’énergie cinétique du système. Par conséquent, la force centripète ne change pas la norme du vecteur vitesse du point, mais elle modifie sa direction. En effet, si la force n’était pas présente, le point cesserait son mouvement circulaire et se déplacerait en mouvement recti-ligne uniforme le long de
r
ut, conformément à la 1re loi de Newton.Suivant cette loi, dans les référentiels galiléens, un point matériel est soit au repos soit en mou-vement rectiligne uniforme. Autrement dit, s’il n’y a pas de force s’exerçant sur un corps (corps isolé), ou si la somme des forces (force résul-tante) s’exerçant sur lui est égale au vecteur nul (corps pseudo-isolé), la direction et la norme de sa vitesse ne changent pas (mouvement recti-ligne uniforme). La force résultante étant égale au vecteur nul, son travail est nul. Cependant, cela ne veut pas dire que si le travail est nul alors la force résultante est nulle et que le point est en mouvement rectiligne uniforme.
Vérifier ses acquis
1 1. a. 2. b. 3. c. 4. a.
2 1. b. 2. d. 3. b. 4. d.
3 1. c. 2. d. 3. a. 4. d.
4 1. b. 2. a. 3. b. 4. b.
5 1. b. 2. b. 3. b. 4. b.5. c. 6. b. 7. b.
Activités d’introduction
Activité 1
L’objectif de cette activité est de faire découvrir le produit scalaire dans l’espace.
1 a. Le plan (ABF) qui passe aussi par E.
b. AB AF ABu ruu u ru
� � �2 2a .
2 a. AC AG ACu ruu u ruu
� � �2 22a .
b. CG BH BF BH BFu ruu u ru uru u ru
� � � � �2 2a .

Chapitre 11 n Produit scalaire n 267
© é
diti
ons
Belin
, 201
2.
c. CF HM DE HM DE HD DE DMu ru u ruu u ru u ruu u ru u ruu u ru
� � � � � � �uu ruu
� - � � -aa a22 2
2 2.
d. AE CDu ru u ruu
� � 0.
3 a. AB ACu ruu u ruu
� � a2, AB CN DC CNu ruu u ruu u ruu u ruu
� � � � - a2
2
et AB ANu ruu u ruu
� � a2
2.
b. On retrouve : AB AN AB AC AB CNu ruu u ruu u ruu u ruu u ruu u ruu
� � � � � .
4 a.
BC CG GH EF FG
BC EF
u ru u ruu u ruu uru u ru
u ru uru
� �� � � �� �� � �� � � � � � � �BC FG CG EF CG FG GH
u ru u ru u ruu uru u ruu u ru u ruu
EEF GH FGuru u ruu u ru
� �� � � � - � �0 0 0 0 02 2a a
b. On en déduit que : BH EGu ru u ru
� � 0 donc que les droites (BH) et (EG) sont orthogonales.
5 a.
AG DF AD DH HG DC CGu ruu u ru u ruu u ruu u ruu u ruu u r
� � � �� � � �uuu u ru
u ruu u ruu u ruu u ruu u ruu
�� �� � � � � �
GF
AD DC AD CG AD CCF DH DC DH CG
DH GF
u ru u ruu u ruu u ruu u ruu
u ruu u ru
� � � �
� � �� � � � � �� � -
HG DC HG CG HG GFu ruu u ruu u ruu u ruu u ruu u ru
0 0 aa a a a2 2 2 20 0 0 0� � � � � � �b. (AG) et (DF) sont dans le plan (ADF) car ADGF est un rectangle. De plus les diagonales [AG] et [DF] ont même longueur a 3, donc le produit scalaire précédent donne l’équation :
a a a2 3 3� ¥ ¥ cosq qui donne : cosq � 13
, soit : q ª 70 5, o.
Activité 2
L’objectif de cette activité est de trouver l’équa-tion cartésienne d’un plan dans l’espace.
1 a. A(0 ; 0 ; 0), B(1 ; 0 ; 0), C(1 ; 1 ; 0) et D(0 ; 1 ; 0).b. Ils ont tous la même cote z = 0.c. (ABE) : y = 0, (ADE) : x = 0, (EFG) : z = 1 et (CDG) : y = 1.
2 a. (AD) : y = x.b. E(0 ; 0; 1) et G(1 ; 1; 1) vérifient aussi cette relation.c. (BDF) : y = – x + 1.
3 a. DF BE DA BE AF BE 0u ru uru u ruu uru u ru uru
� � � � � �
et DF BG DC BG CF BGu ru u ru u ruu u ru u ru u ru
� � � � � � 0.
b. La droite (DF) est orthogonale à deux droites sécantes du plan (BEG), elle est donc orthogonale à ce plan.c. Et par conséquent elle est orthogonale à toutes les droites du plan (BEG).
d. DFu ru
(1 ; –1 ; 1).
e. DF BMu ru u ruu
� � ¥ - � - ¥ � ¥1 1 1 1( ) ( )x y z � - - �x y z1 donc une équation du plan (BEG) est : x y z- � - �1 0.f. Les coefficients des inconnues sont les coor-
données du vecteur DFu ru
.
Activité 3
Dans cette activité on cherche à découvrir des pro-priétés particulières du tétraèdre régulier.
1 a. Pour construire O, on découpe le segment [AA′] en quatre parties égales et on en compte trois à partir de A.
b. OA OB OC OD
OA OA A B
u ruu u ruu u ruu u ruu
u ruu u ruuu
� � �
� � ¢ � ¢uu ruu u ruuu u ruu u ruuu u ruuu
u ruu
� ¢ � ¢ � ¢ � ¢
�
OA A C OA A D
OA �� ¢ � � ¢ �3 4 3 0OA OA AAu ruuu u ruu u ruuu
r
.2
a. AB CD AB CB AB BDu ruu u ruu u ruu u ru u ruu u ru
� � � � �
� a23
cosp -- �a2
30cos
p
car les triangles sont équilatéraux.b. On en déduit que les arêtes opposées sont orthogonales.
c. AA BC AD BC DA BC¢ � � � � ¢ � � � �u ruuu u ru u ruu u ru u ruuu u ru
0 0 00 car (DA′) est hauteur dans BCD.d. On en déduit que les hauteurs sont orthogo-nales à leur face opposée.
3 a. Le théorème de la médiane donne :
OC OB OK BC OA BC A K2 2 2 2- � � � ¢ � � ¢ �u ruu u ru u ruuu u ru u ruuu
BBCu ru� � � 0
b. On en déduit que O est le centre du cercle cir-conscrit au tétraèdre.

268 n Chapitre 11 n Produit scalaire
© é
diti
ons
Belin
, 201
2.
Travaux pratiques
Les travaux pratiques de ce chapitre sont tous inspirés de sujets de l’épreuve pratique.
1TP TICE 1 Tétraèdre trirectangle
B
A
O
C
M
H
1 On conjecture que le point H décrit un arc de cercle.
2 On conjecture que la distance est minimale quand M est en A ou en B et qu’elle est maximale quand M est au milieu de [AB].
3 a. CM CO CM CH HO CH CMu ruu u ruu u ruu u ruu u ruu u ruu u
� � � �� � � �rruu u ruu
� CO2.
b. L’égalité précédente qui s’écrit CH CM CO¥ � 2 montre que quand CM est grand alors CH est petit et inversement quand CM est petit alors CH est grand. Donc CH est minimale quand M est en A ou B et CH est maximale quand M est au milieu du segment.
La longueur minimale est : 4
2 22� et la
longueur maximale est : 46
2 63
� .
c. Comme ces deux longueurs sont distinctes, on en déduit que le point H ne décrit pas un arc de cercle.
2TP TICE 2 À la recherche de l’angle droit
Partie AOn conjecture l’existence d’un autre point qui annule ce produit scalaire, c’est-à-dire qu’en ce point (MA) et (MC) sont orthogonales.
Partie B
1 Le théorème de Thalès donne : M(x ; x ; x).
2 f xx
xx
xx
x( ) � � �
---
Ê
Ë
ÁÁÁ
ˆ
¯
˜˜˜�---
Ê
Ë
ÁMA MCu ruu u ruu
11ÁÁÁ
ˆ
¯
˜˜˜� -3 22x x.
Donc l’équation a pour solution : x � 0 ou x � 23
.
3 Le point correspondant est donc situé aux deux tiers à partir de D sur [DF].
3TP TICE 3 Recherche d’un minimum
On conjecture à l’aide d’un logiciel que la valeur minimale du produit scalaire est 0,5 pour le point M au milieu du segment [AC].
MO MBu ruuu u ruu
� �-
-
Ê
Ë
ÁÁÁ
ˆ
¯
˜˜˜�-
-
Ê
Ë
ÁÁÁ
ˆ
¯
˜˜˜�
x
z
x
z0 1 xx z2 2� , qui est minimal
pour x z� � 12
ce qui vérifie les conjectures.
4TP TICE 4 Où est le triangle rectangle ?
On conjecture à l’aide d’un logiciel que le produit scalaire s’annule quand le point M est au milieu du segment [BC].On pose MB = x et on appelle a la longueur des arêtes du tétraèdre régulier alors :
MI MJ MB BI MC CJ
MB
u ru u ru u ruu ur u ruu uru
u ruu
� � �� � � �� �� �� � � � � �
� - - �
MC MB CJ BI MCu ruu u ruu uru ur u ruu
0
2x a x
ax( ) ccos ( )cos
( )
p p3 2 3
212 2
12
2
2
� -
� - � � -
� -
aa x
x axa
xa
a x
x ax �� � -ÊËÁ
ˆ¯̃
ax
a2 2
4 2,
qui s’annule bien quand M est au milieu de [BC].
5TP TICE 5 Distance d’un point à un plan
1 r
n (1 ; –1 ; 1).
2 x a ty b tz c t
� �� -� �
�
ÌÔ
ÓÔ
.

Chapitre 11 n Produit scalaire n 269
© é
diti
ons
Belin
, 201
2.
3 Les coordonnées de H vérifient : ( ) ( ) ( )a t b t c t� - - � � - �4 0 ce qui donne :
t a b c� - � - �� �13
4 comme paramètre et donc :
H
13
2 4
13
2 4
13
2 4
( )
( )
( )
a b c
a b c
a b c
� - �
� � -
- � � �
Ê
Ë
ÁÁÁÁÁÁÁ
ˆ̂
¯
˜˜˜˜˜˜˜
.
4 On utilise l’inégalité triangulaire.
5 On a : MH2 2 23
13
4� � - � - �� �t a b c .
6 Pour a = b = c = 1, on obtient : AH � 3.
7 N est le symétrique de M par rapport à H donc H est le milieu de [MN] ce qui donne :
N
13
2 2 8
13
2 2 8
13
2 2 8
( )
( )
( )
a b c
a b c
a b c
� - �
� � -
- � � �
Ê
Ë
ÁÁÁÁÁÁÁÁ
ˆ
¯
˜˜˜˜˜˜˜
et dans le cas du point A,
on obtient son symétrique (3 ; –1 ; 3).
Exercices
Maîtriser le cours
1 a. Vrai. b. Faux.c. Faux. d. Faux. e. Vrai.
2 1. a. 2. c.3. b. 4. a. 5. b.
3 a. Faux. b. Vrai.c. Faux. d. Vrai. e. Vrai.
4 a. Faux. b. Vrai.c. Vrai. d. Faux. e. Vrai.
5 a. Faux. b. Vrai.c. Vrai. d. Faux. e. Vrai.
6 1. c. 2. d. 3. b. 4. a.
7 a. Faux. b. Vrai.c. Faux. d. Vrai.
8 1. c. 2. b. 3. d.
Appliquer les capacités attendues
10 a. AG BGu ruu u ru
� � 2 2a . b. GA BDu ruu u ru
� � 0.
c. BE BHuru u ru
� � 2 2a . d. AC DG EG DGu ruu u ruu u ru u ruu
� � � � a2.
11 a. AB AIu ruu uru
� � a2. b. AE AIu ru uru
� � a2
2.
c. AF AI AE AI EF AIu ru uru u ru uru uru uru
� � � � � � � �aa
a22
2
232
.
d. AB AJ AB AF AB FJu ruu uru u ruu u ru u ruu ur
� � � � � � � �a a2 20 .
e. DJ DC DG DC GJ DCuru u ruu u ruu u ruu uru u ruu
� � � � � � � �a a2 20 .
f. BH BIu ru ur
� � a2
2.
12 a. JE FIuru ur
� � 0. b. KE FIu ru ur
� � 0.
c. BG AI BG AB BG BIu ru uru u ru u ruu u ru ur
� � � � � � � �02 2
2 2a a.
d. BC AJ BC AB BC BJu ru uru u ru u ruu u ru uru
� � � � � � � �02 2
2 2a a.
13 a. EI EK EF EK FI EKur u ru uru u ru ur u ru
� � � � � � � �a a2 2
20
2.
b. cosIEKEI EKEI EK
�
ur u ru
� �¥
� �
a
a
2
22
54
25
.
14 a. r r
u v� � 1. b. AB ACu ruu u ruu
� � 15. c. r r
u v� � -3.
15 r
u et r
w.
16 a. Rectangle en B. b. Rectangle en C.c. Rectangle en A. d. Rectangle en A.
17 a. ABC isocèle en B, car AB = BC = 9.
b. AB AC AB AC BACu ruu u ruu
�� � ¥ ¥ cos donne :
25 9 5 2� ¥ cosBAC�, d’où : cosBAC� � 5 218
et
donc : BAC�
oª 66 9, . De même :
BA BC BA BC ABCu ruu u ru
�� � ¥ ¥ cos donne :
56 9 9� ¥ cosABC� , d’où : cosABC� � 5681
et donc :
ABC�
oª 46 3, . Ainsi ACB�
oª 66 9, .
18 Le triangle ABC est rectangle en B, car : AB2 134� , BC2 45� et AC2 179� .
19 Le quadrilatère ABCD est seulement un paral-
lélogramme, car AB DCu ruu u ruu
� .
20 a. AB ACu ruu u ruu
� � -15, BA BCu ruu u ru
� � 36 et CA CBu ruu u ru
� � 41.

270 n Chapitre 11 n Produit scalaire
© é
diti
ons
Belin
, 201
2.
b. BAC�
o� -ÊËÁ
ˆ¯̃ª-cos ,1 15
21 26129 9 ,
ABC�
o�ÊËÁ
ˆ¯̃ª-cos ,1 36
21 7726 5
et ACB�
o�ÊËÁ
ˆ¯̃ª-cos ,1 41
26 7723 6 .
21 a. r
r
r
r
r
r
u i u j u k� � � � � �2 2 2, et .
b. r
r
i u,� � � p4 , r
r
j u,� � � p3 et r
r
k u,� � � p3 , car r
u � 2 2.
23 a. ABu ruu
( ; ; )- - -1 7 4 et BDu ru
( ; ; )3 5 1 ne sont pas perpendiculaires.
b. CDu ruu
( ; ; )1 1 2- est orthogonale à ABu ruu
.
24 ABu ruu
( ; ; )-1 3 2 et CHu ruu
( ; ; )- -4 2 1 sont orthogo-
naux d’une part et d’autre part AHu ruu
( ; ; )1 3 2- - est
colinéaire à ABu ruu
donc cela vérifie bien que H est le projeté de C sur (AB).
25 a. BE DF BA AE DB BF
BA
uru u ru u ruu u ru u ru uru
u ruu
� � �� � � �� �� �� � � � � � �� -
DB BA BF AE DB AE BFu ru u ruu uru u ru u ru u ru uru
a22 20 0 0� � � �a .b. La droite (DF) est orthogonale à (BE) et à (BG) par symétrie donc elle est perpendiculaire au plan (BEG).c. Non le point G par exemple n’est pas équidis-tant de D et de F.
26 a. BC AIu ru uru
� � 0 car le tétraèdre est régulier.
b. BC AD BC AI BC IDu ru u ruu u ru uru u ru uru
� � � � � � 0.
c. BC DH BC DA BC AHu ru u ruu u ru u ruu u ru u ruu
� � � � � � 0.d. H est l’orthocentre de BCD car par symétrie on aurait les mêmes résultats avec les autres som-mets.
27 a. DF MP DF MF DF FPu ru u ruu u ru u ruu u ru uru
� � � � � � - �a a2 2 0 et
DF GP DF GF DF FPu ru u ruu u ru u ru u ru uru
� � � � � � - �a a2 2 0.b. La droite (DF) est donc perpendiculaire au plan (MNP).c. T est le projeté orthogonal de N sur (DF) car (DF) est orthogonale à toutes les droites du plan (MNP).
d. DF DN DF DC DF CNu ru u ruu u ru u ruu u ru u ruu
� � � � � � � �a a a2 2 2 22 et comme T est la projection de N sur (DF) :
DF DN DF DT DF DT DTu ru u ruu u ru u ru
� � � � ¥ � ¥a 3 , donc :
DT � 2 33a
.
29 a. r
u( ; ; )-2 1 3 et r
¢ - - -u ( ; ; )1 1 2 ne sont pas
orthogonaux.b.
r
u( ; ; )2 1 1- et r
¢ -u ( ; ; )1 3 5 sont orthogonaux.
c. r
u( ; ; )1 1 3- et r
¢ -u ( ; ; )4 2 2 sont orthogonaux.
30 a. (AB) : x ty tz t
� - ��� �
�
ÌÔ
ÓÔ
1 2
2.
b. (CD) : x tyz t
� - ��� -
�
ÌÔ
ÓÔ
2 214 4
. c. AB CDu ruu u ruu
� � 0.
d. Elles sont perpendiculaires si le système
suivant a une solution : - � � - ��� � -
�
ÌÔ
ÓÔ
1 2 2 21
2 4 4
t st
t s ce qui
n’est pas le cas donc elles sont orthogonales.
31 a. (AB) : x ty tz t
� - �� -� -
�
ÌÔ
ÓÔ
1 31 23 5
.
b. (CD) : x ty tz t
�� -� - �
�
ÌÔ
ÓÔ
21 24 2
. c. AB CDu ruu u ruu
� � 0.
d. Le système suivant : - � �- � -- � - �
�
ÌÔ
ÓÔ
1 3 21 2 1 23 5 4 2
t st st s
a une
solution t = s = 1 donc elles sont perpendiculaires au point de coordonnées (2 ; –1 ; –2).
33 a. r
n(–1 ; –1 ; 2) et r
¢n (2 ; 4 ; –3) alors r r
n n� ¢ � 0 donc les plans ne sont pas perpendiculaires.b.
r
n (1 ; –2 ; 1) et r
¢n (–3 ; 1 ; –4) alors r r
n n� ¢ � 0 donc les plans ne sont pas perpendiculaires.c.
r
n (1 ; –2 ; 0) et r
¢n (2 ; 1 ; –3) alors r r
n n� ¢ � 0 donc les plans sont perpendiculaires.
34 Dans ces trois cas les plans sont perpendicu-laires car ce sont des plans parallèles aux plans des axes.
35 (P) est parallèle à (Q).(P′) est parallèle à (R′).(R) est perpendiculaire à (P) et à (Q).(Q′) est perpendiculaire à (P′) et à (R′).
37 a. x z- � �2 5 0. b. x z- � �4 5 0.c. x y z� - �2 0. d. x y z� � � �2 0.e. x y� �2 0.

Chapitre 11 n Produit scalaire n 271
© é
diti
ons
Belin
, 201
2.
38 a. A(1 ; 1 ; 1) et r
n23
15
13
; ;ÊËÁ
ˆ¯̃.
b. A(3 ; 4 ; 5) et r
n13
14
15
; ;ÊËÁ
ˆ¯̃.
c. A 2 0 2; ;� � et r
n 0 1 3; ;� �.d. A 2 3 0; ;� � et
r
r
n k� -3 .
39 On a : BCu ru
(0 ; 5 ; –2), donc une équation est de la forme : 5y – 2z + d = 0 et le point A donne : d = 2.
40 Ici BCu ru
(2 ; –2 ; 2) donc une équation est de la forme : x – y + z + d = 0 et le point A donne : d = 4.
42 a. 2 3 6 0x y z- � - � .b. 15 8 7 0x y z� - � � . c. 2 8 5 5 0x y z� � � � .d. - � � � �31 33 24 37 0x y z .
e. x y z- � - �2 1 0.
44 a. 5 1 1 2 0( ) ( )� - - � � �t t t donne : t = –1, d’où les coordonnées du point d’intersection (0 ; –2 ; –1).b. Ici un vecteur directeur est (–2 ; 1 ; 3) et un vecteur normal est (1 ; –1 ; 1) qui sont orthogo-naux donc la droite et le plan sont parallèles.c. Ici un vecteur directeur est (1 ; 1 ; 1) et un vec-teur normal est (1 ; 1 ; –2) qui sont orthogonaux donc la droite et le plan sont parallèles.
45 a. ( ) ( ) ( )- � - - � � - �1 3 3 1 1 0t t t donne :
t � 111
d’où les coordonnées du point
- -ÊËÁ
ˆ¯̃
1011
311
1211
; ; .
b. Ici un vecteur directeur est (3 ; –1 ; 0) et un vecteur normal est (1 ; 3 ; –1). Ces vecteurs sont orthogonaux donc la droite et le plan sont parallèles.c. ( ) ( ) ( )5 1 2 4 2 0� � � - - � �t t t donne : t = 0 d’où les coordonnées du point d’intersection (5 ; 1 ; 4).
47 a. On a le système 2 3 4 0
2 1 0x y z
x y z- � - �� - � �
�ÌÓÔ
dans
lequel on fixe le paramètre y = t ce qui donne :
2 3 42 1
x z tx z t� � �- � - -
�ÌÓÔ
d’où : x
t
z t
� �
� �
�
ÌÔÔ
ÓÔÔ
13
273
et une représentation de la droite :
xt
y t
z t
� ��
� �
�
ÌÔÔ
ÓÔÔ
13
273
.
b. On a : x y zx y z- � - �� - - �
�ÌÓÔ
3 2 02 1 0
dans lequel on fixe
le paramètre z = t d’où : x y tx y t- � - �� � �
�ÌÓÔ
3 22 1
et une représentation de la droite :
x t
y t
z t
� -
� - �
�
�
Ì
ÔÔ
Ó
ÔÔ
123
173
.
c. Des vecteurs normaux sont (1 ; 1 ; 1) et (2 ; 2 ; 2) qui sont colinéaires donc les deux plans sont parallèles.
d. - � � - �- � - �
�ÌÓÔ
3 2 1 02 5 0
x y zx y z
on fixe z = t
ce qui donne : - � � - �- � - �
�ÌÓÔ
3 2 12 5
x y tx y t
et une représentation de la droite est : x ty tz t
� - �� - ��
�
ÌÔ
ÓÔ
11 516 7 .
48 On a les vecteurs : ABu ruu
(–2 ; 3 ; –4) et
ACu ruu
(3 ; –1 ; –1) qui donnent pour un vecteur nor-
mal au plan (ABC) le système : - � - �- - �
�ÌÓÔ
2 3 4 03 0
a b ca b c
,
dont une solution est (1 ; 2 ; 1) et une équation du plan (ABC) est : x + 2y + z = 0.
De même pour le plan (DEF), on a : DEu ru
(–3 ; –1 ; –1)
et DFu ru
(–5 ; 0 ; –4) qui donnent : - - - �- - ��ÌÓÔ
3 05 4 0a b ca c
dont une solution est (–4 ; 7 ; 5) et une équation du plan (DEF) est : - � � � �4 7 5 3 0x y z . Ensuite
on a donc le système : x y z
x y z� � �- � � � ��ÌÓÔ
2 04 7 5 3 0
dans lequel on fixe y = t ce qui donne : x z t
x z t� � -- � � - -�ÌÓÔ
24 5 7 3
et une représentation de la droite :
x t
y t
z t
� -
�
� - -
�
Ì
ÔÔ
Ó
ÔÔÔ
13
13
13
53
.
49 Un vecteur directeur de la droite d’intersec-tion est orthogonal aux vecteurs normaux de ces plans de coordonnées (3 ; –2 ; 4) et (2 ; 1 ; –1).
Ce qui donne le système : 3 2 4 02 0a b ca b c- � �� - �
�ÌÓÔ
dont une solution est (–2 ; 11 ; 7).

272 n Chapitre 11 n Produit scalaire
© é
diti
ons
Belin
, 201
2.
50 a. Faux, car F(0 ; 1 ; 1) n’appartient pas à ce plan.b. Faux, car D(0 ; 1 ; 0) n’appartient pas à cette droite.
51 a. Vrai. b. Vrai. c. Vrai.d. Faux, car la plus grande distance est la diago-nale du cube qui vaut 3.
52 a. d passe par C pour t = –2, mais A, B et C
ne sont pas alignés car les vecteurs ABu ruu
et ACu ruu
ne sont pas colinéaires, donc faux.b. Un vecteur directeur de d est (3 ; 1 ; –1) qui
n’est pas colinéaire avec ABu ruu
(1 ; 1 ; 4) donc les droites ne sont pas parallèles : faux.
c. Une représentation de (AB) est : x ty tz t
� �� �� �
�
ÌÔ
ÓÔ
51260 4
et on cherche à résoudre le système : 5 3 112 260 4
� � -� � �� � -
�
ÌÔ
ÓÔ
t st s
t s qui n’a pas de solution donc les
droites ne sont pas sécantes : faux.d. Le produit scalaire des vecteurs directeurs est nul et comme elles ne sont pas sécantes, alors elles sont orthogonales : vrai.
53 a. Vrai. b. Vrai.c. Faux. d. Faux.e. Faux. f. Vrai.g. Faux. h. Faux.i. Vrai. j. Vrai.
54 1. F(1 ; 0 ; 1), G(1 ; 1 ; 1), I 023
1; ;ÊËÁ
ˆ¯̃ et
J 123
0; ;ÊËÁ
ˆ¯̃.
2. a. (GP) est orthogonale à (FI) et (FJ), car elle est perpendiculaire au plan (FIJ).
b. GN FIu ruu ur
� � - - � -( ) ( )x y123
1 et
GN FJu ruu ur
� � - �23
1 1( )y .
c. On obtient le système : - � � �
� �
�
ÌÔÔ
ÓÔÔ
x y
y
23
13
0
23
13
0
d’où : N 012
0; ;-ÊËÁ
ˆ¯̃.
S’entraîner
55 a. (2 ; –6 ; 2). b. (1 ; 2 ; –2).c. (0 ; 1 ; –1). d. (1 ; 0 ; 0)
56 a. (1 ; 1 ; 0). b. (1 ; 0 ; –2).c. (0 ; 2 ; 1). d. (2 ; –1 ; –3).
57 a. Un vecteur (3 ; –5 ; 1) et un point (0 ; 0 ; –1).b. Un vecteur (1 ; 0 ; –1) et un point (1 ; 0 ; 1).c. Un vecteur (–1 ; 3 ; 0) et un point (3 ; 0 ; 4).d. Un vecteur (2 ; –1 ; 0) et un point (0 ; 1 ; 3).
58 On vérifie que B appartient au plan, puis un vecteur normal au plan est (–5 ; 1 ; –1) qui est
colinéaire à ABu ruu
(5 ; –1 ; 1).
59 On a ABu ruu
(–3 ; 6 ; –3) qui est colinéaire à un vec-teur normal au plan de coordonnées (1 ; –2 ; 1).
60 a. On a les vecteurs normaux : r
u (7 ; 3 ; –1), r
v (6 ; –11 ; –9) et r
w (2 ; –3 ; 5).b.
r r r r
u w v w� � � � 0 donc le plan (R) est perpendi-culaire aux plans (P) et (Q).
61 Des vecteurs normaux sont : (–2 ; –7 ; 6) et (2 ; 7 ; –6) qui sont colinéaires donc les plans sont parallèles.
62 Un vecteur normal à (P) est (2 ; –3 ; 7) donc une équation de (Q) est de la forme : 2 3 7 0x y z d- � � � et il passe par le point A ce qui donne alors : 2 3 7 7 0x y z- � � � .
63 Un vecteur normal à (P) est (2 ; –7 ; 5) donc les plans parallèles sont de la forme :2 7 5 0x y z d- � � � .a. Ici on a : 2 7 5 21 0x y z- � - � .b. Ici on a : 2 7 5 30 0x y z- � - � .
64 a. On a le système : - � -- � -- � - �
�
ÌÔ
ÓÔ
1 4 51 3 21 2 1 2
st st s
qui a
pour solutions s = 1 et t = 0. Donc les deux droites se coupent au point de coordonnées (–1 ; 1 ; 1).b. Un vecteur normal au plan est orthogonal aux vecteurs directeurs des deux droites ce qui donne
le système : - - �- - � ��ÌÓÔ
b ca b c
2 05 2 2 0
dont une solution
est (6 ; –10 ; 5) et une équation cartésienne du plan est de la forme : 6 10 5 0x y z d- � � � et il passe par le point d’intersection ce qui donne : 6 10 5 11 0x y z- � � � .

Chapitre 11 n Produit scalaire n 273
© é
diti
ons
Belin
, 201
2.
65 a. Les vecteurs directeurs sont : (–4 ; 2 ; –2) et (2 ; –1 ; 1) qui sont colinéaires donc les droites sont parallèles. Elles sont strictement parallèles car par exemple le point (–2 ; 3 ; 1) de (d) n’ap-partient pas à (d′).b. On a besoin de deux vecteurs non colinéaires du plan pour trouver un vecteur normal, prenons le point (–2 ; 3 ; 1) de (d) et le point (1 ; 5 ; –1) de (d′) ce qui donne le vecteur (3 ; 2 ; –2). Donc un vecteur normal au plan vérifie le système : 2 03 2 2 0a b ca b c- � �� - �
�ÌÓÔ
dont une solution est (0 ; 1 ; 1)
ce qui donne une équation du plan : y z d� � � 0 et avec un point : y z� - �4 0.
66 a. ABu ruu
(1 ; –2 ; –2) et ACu ruu
(2 ; 0 ; –2) ne sont pas colinéaires donc les points déterminent un plan.b. Un vecteur normal à ce plan vérifie : a b ca c- - �- �
�ÌÓÔ
2 2 02 2 0
dont une solution est (2 ; –1 ; 2).
Une équation du plan (ABC) est : 2 2 6 0x y z- � � � .c. Un vecteur normal à (P) est (2 ; 2 ; –1) qui est bien orthogonal à la solution (2 ; –1 ; 2) du plan (ABC).
d. On a le système : 2 2 6 02 2 12 0x y zx y z- � � �� - - �
�ÌÓÔ
dans
lequel on fixe z = t ce qui donne une représenta-
tion de la droite d’intersection :
x t
y tz t
� -
� ��
�
Ì
ÔÔ
Ó
ÔÔÔ
12
6 .
67 a. (d) est sécante au point (10 ; 4 ; 0).
b. (d) est sécante au point 023
103
; ;ÊËÁ
ˆ¯̃.
c. (d) est sécante au point (–2 ; 0 ; 4).d. (d) est sécante au point (1 ; 1 ; 3).e. (d) a pour vecteur directeur (3 ; 1 ; –1) et le plan pour vecteur normal (1 ; –2 ; 1) qui sont orthogo-naux donc la droite (d) est parallèle au plan.
68 a. On a : x ty tz t
�� - �� - �
�
ÌÔ
ÓÔ
11
.
b. Le plan - � � � �3 2 3 0x y z a pour vecteur normal (–3 ; 1 ; 2) qui est orthogonal au vecteur directeur (1 ; 1 ; 1) de la droite donc ils sont parallèles. Le plan 2 3 3 0x y z- � - � a pour vec-teur normal (2 ; –3 ; 1) qui est aussi orthogonal
au vecteur directeur de la droite donc ils sont également parallèles. Le plan –x + 2y – 3z + 3 = 0 a pour vecteur normal (–1 ; 2 ; –3) qui n’est pas orthogonal, ni colinéaire au vecteur directeur de la droite, donc ils sont sécants en un point.
69 a. On a (AB) : x ty tz
�� ��
�
ÌÔ
ÓÔ
43 21
.
b. Les vecteurs directeurs de ces deux droites ne sont pas colinéaires donc elles ne sont pas paral-
lèles. De plus le système : 4 1 23 2 11 2
t st ss
� �� � - -�
�
ÌÔ
ÓÔ
n’a pas
de solution donc elles ne sont pas non plus sécantes. Par conséquent elles ne sont pas coplanaires.
c. Un vecteur normal à (P) est orthogonal à ABu ruu
et au vecteur directeur (2 ; –1 ; 2) de (d), ce qui donne
le système : 2 2 04 2 0a b ca b- � �� �
�ÌÓÔ
dont une solution
(1 ; –2 ; –2) donne une équation du plan : x y z- - � �2 2 8 0 qui passe par A et B.d. Un vecteur normal de (Q) est orthogonal à un vecteur directeur de (d) et à un vecteur normal à
(P) ce qui donne le système : 2 2 0
2 2 0a b c
a b c- � �- - �
�ÌÓÔ
dont
une solution est (2 ; 2 ; –1) qui donne une équa-tion du plan de la forme : 2 2 0x y z d� - � � . Pour trouver d, il suffit de prendre un point de la droite (d) soit (1 ; –1 ; 0) ce qui donne :2 2 0x y z� - � .
e. On a le système : 2 2 0
2 2 8 0x y z
x y z� - �- - � �
�ÌÓÔ
dans
lequel on fixe z = t ce qui donne :
x t
y t
z t
� - �
� -
�
�
Ì
ÔÔÔ
Ó
ÔÔÔ
83
83
12
.
f. On a le système :
- � �
- � �
�
�
Ì
ÔÔÔ
Ó
ÔÔÔ
83
4
83
12
3 2
1
t s
t s
t
qui a pour
solution : t � 1 et s � - 512
. Donc on obtient le
point d’intersection : -ÊËÁ
ˆ¯̃
53
136
1; ; .

274 n Chapitre 11 n Produit scalaire
© é
diti
ons
Belin
, 201
2.
70 1. On a : ABu ruu
(2 ; –3 ; –1) ce qui correspond bien à un vecteur directeur de (d).2. On a un vecteur directeur de (d′) :
r
u (–1 ; 2 ; 1) donc les droites ne sont pas parallèles. Et le sys-
tème : 1 2 2
2 3 1 21
� � -- - � �- - �
�
ÌÔ
ÓÔ
t kt k
t k n’a pas de solution donc
les droites ne sont pas coplanaires.3. a.
r r
u w� � 0 donc les droites sont orthogonales
b. ABu ruu
r
� �w 0 donc les droites sont orthogonales
et le système : 1 2 6
2 3 71 4
� � �- - � - �- - � - -
�
ÌÔ
ÓÔ
t st s
t s a pour solution
t = 2 et s = –1 ce qui donne le point E(5 ; –8 ; –3).
71 a. ABu ruu
(–1 ; 4 ; –2) et ADu ruu
(1 ; 2 ; 0) ne sont pas colinéaires.
b. ECu ru
(2 ; –1 ; –3) est orthogonal à AB et ADu ruu u ruu
.
c. On a un vecteur normal ECu ru
, donc une équation est : 2 3 6 0x y z- - � � .
d. On a : x ty tz t
� �� - -� - -
�
ÌÔ
ÓÔ
6 271 3
.
e. On a : 2 6 2 7 3 1 3 6 0( ) ( ) ( )� - - - - - - � �t t t qui donne t = –2 et donc F(2 ; –5 ; 5).
72 a. IG IA IG IE IG EAuru uru uru ur uru u ru
� � � � � � - � � -14
014
.
b. AIG�
o�-Ê
Ë
ÁÁÁ
ˆ
¯
˜˜˜� -
ÊËÁˆ¯̃ª- -cos cos ,1 1
14
54
15
101 5 .
c. Grâce aux coordonnées on a : B(1 ; 0 ; 0), K(0 ; 0,5 ; 0,5), I(0,5 ; 0 ; 1) et G(1 ; 1 ; 1),
puis BKu ru
(–1 ; 0,5 ; 0,5), IGuru
(0,5 ; 1 ; 0)
et IAuru
(–0,5 ; 0 ; –1). On vérifie bien que :
BK IG BK IAu ru uru u ru uru
� � � � 0.
d. BKu ru
est donc un vecteur normal au plan (AIG) qui a donc pour équation : - � � �x y z0 5 0 5 0, , .e. Le plan parallèle a pour équation : - � � - �x y z0 5 0 5 0 5 0, , , .
73 1. a. AB AD AE AGu ruu u ruu u ru u ruu
� � � .
b. AG BD AB BD AD BD AE BDu ruu u ru u ruu u ru u ruu u ru u ru
� � � � � � �uu ru
� - � � �1 1 0 0.
c. AG BE AB BE AD BE AE BEu ruu uru u ruu uru u ruu uru u ru
� � � � � � �uuru
� - � � �1 0 1 0.
d. Donc la droite (AG) est orthogonale au plan (BDE).
2. L’égalité : AB AD AE AGu ruu u ruu u ru u ruu
� � � donne : 3AI AGuru u ruu
� .
3. a. Le vecteur AGu ruu
est un vecteur normal donc une équation est : x + y + z – 1 = 0.b. Cette fois-ci ce vecteur est vecteur directeur de
la droite donc : x ty tz t
�� �� �
�
ÌÔ
ÓÔ
11
.
c. On a : t t t� � � � - �1 1 1 0 qui donne t � - 13
et le point J -ÊËÁ
ˆ¯̃
13
23
23
; ; .
d. Il s’agit de la distance : HJ � 33
.
74 Partie A
a. MD MA MI IA MI IA MI Iu ruu u ruu u ru uru u ru uru
� � -� � � �� � � -2 AA2.
b. MD MAu ruu u ruu
� � 0 devient MI = IA c’est-à-dire que M est sur le cercle de centre I et de rayon IA.
Partie B
a. ABu ruu
(–3 ; 6 ; 0) et ACu ruu
(–3 ; 0 ; 4) sont orthogo-naux à
r
n.b. 4x + 2y + 3z – 12 = 0.
c. x ty tz t
� - ��� �
�
ÌÔ
ÓÔ
5 421 3
.
d. On a : 4 5 4 2 2 3 1 3 12 0( ) ( ) ( )- � � � � - �t t t qui donne : t = 1 et alors H(–1 ; 2 ; 4).e. C’est la distance HD � 29.
f. On calcule : I(–1 ; 0 ; 0,5), IA � 652
et
HI � 652
donc H appartient à l’ensemble (E).
75 1. a. CDu ruu
(–4 ; 4 ; 0) et CEu ru
(–4 ; 0 ; 4) ne sont pas colinéaires.b. Un vecteur normal au plan vérifie : - � �- � ��ÌÓÔ
4 4 04 4 0a ba c
soit (1 ; 1 ; 1) qui donne pour le
plan : x y z� � - �4 0.2. a. Un vecteur normal à (P) est (0 ; 3 ; 1) qui n’est pas colinéaire à (1 ; 1 ; 1) donc les plans sont sécants.b. Droite en trait mixte.3. a. Figure en pointillé.b. Ce plan passe par F et G ce qui donne : 2 6 03 6 0ab- �- �
�ÌÓÔ
d’où : 3 2 6 0x y� - � .
Chapitre 11 n Produit scalaire n 275
© é
diti
ons
Belin
, 201
2.
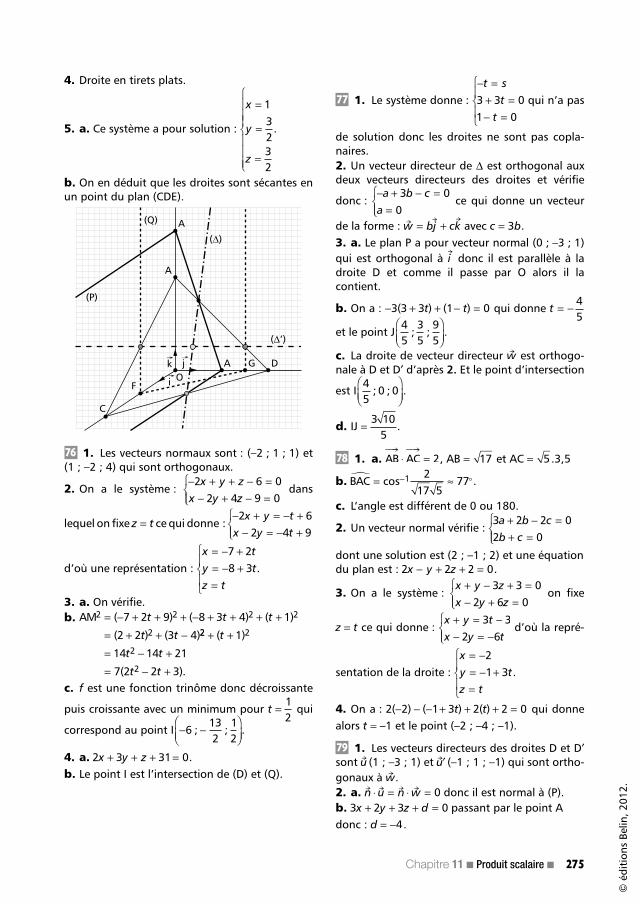
4. Droite en tirets plats.
5. a. Ce système a pour solution :
x
y
z
�
�
�
�
Ì
ÔÔÔ
Ó
ÔÔÔ
13232
.
b. On en déduit que les droites sont sécantes en un point du plan (CDE).
C
ai
ak aj
FO
A G D
A
A
(P)
(Q)
(∆)
(∆’)
76 1. Les vecteurs normaux sont : (–2 ; 1 ; 1) et (1 ; –2 ; 4) qui sont orthogonaux.
2. On a le système : - � � - �- � - �
�ÌÓÔ
2 6 02 4 9 0
x y zx y z
dans
lequel on fixe z = t ce qui donne : - � � - �- � - �
�ÌÓÔ
2 62 4 9
x y tx y t
d’où une représentation : x ty tz t
� - �� - ��
�
ÌÔ
ÓÔ
7 28 3 .
3. a. On vérifie.b. AM2 2 2 2
2
7 2 9 8 3 4 1
2 2 3 4
� - � � � - � � � �� � � -
( ) ( ) ( )
( ) ( )
t t t
t t 22 2
2
2
1
14 14 21
7 2 2 3
� �� - �� - �
( )
( ).
t
t t
t tc. f est une fonction trinôme donc décroissante
puis croissante avec un minimum pour t = 12
qui
correspond au point I - -ÊËÁ
ˆ¯̃
6132
12
; ; .
4. a. 2 3 31 0x y z� � � � .b. Le point I est l’intersection de (D) et (Q).
77 1. Le système donne : - �� �- �
�
ÌÔ
ÓÔ
t st
t3 3 01 0
qui n’a pas
de solution donc les droites ne sont pas copla-naires.2. Un vecteur directeur de D est orthogonal aux deux vecteurs directeurs des droites et vérifie
donc : - � - ��
�ÌÓÔ
a b ca
3 00
ce qui donne un vecteur
de la forme : r
r r
w bj ck� � avec c = 3b.3. a. Le plan P a pour vecteur normal (0 ; –3 ; 1) qui est orthogonal à
r
i donc il est parallèle à la droite D et comme il passe par O alors il la contient.
b. On a : - � � - �3 3 3 1 0( ) ( )t t qui donne t � - 45
et le point J45
35
95
; ;ÊËÁ
ˆ¯̃.
c. La droite de vecteur directeur r
w est orthogo-nale à D et D′ d’après 2. Et le point d’intersection
est I45
0 0; ;ÊËÁ
ˆ¯̃.
d. IJ � 3 105
.
78 1. a. AB ACu ruu u ruu
� � 2, AB � 17 et AC � 5.3,5
b. BAC�
o� ª-cos 1 217 5
77 .
c. L’angle est différent de 0 ou 180.
2. Un vecteur normal vérifie : 3 2 2 02 0a b cb c� - �� �
�ÌÓÔ
dont une solution est (2 ; –1 ; 2) et une équation du plan est : 2 2 2 0x y z- � � � .
3. On a le système : x y zx y z� - � �- � �
�ÌÓÔ
3 3 02 6 0
on fixe
z = t ce qui donne : x y tx y t� � -- � -
�ÌÓÔ
3 32 6
d’où la repré-
sentation de la droite : xy tz t
� -� - ��
�
ÌÔ
ÓÔ
21 3 .
4. On a : 2 2 1 3 2 2 0( ) ( ) ( )- - - � � � �t t qui donne alors t = –1 et le point (–2 ; –4 ; –1).
79 1. Les vecteurs directeurs des droites D et D′ sont
r
u (1 ; –3 ; 1) et r
¢u (–1 ; 1 ; –1) qui sont ortho-gonaux à
r
w.2. a.
r r r r
n u n w� � � � 0 donc il est normal à (P).b. 3 2 3 0x y z d� � � � passant par le point A donc : d = -4.

276 n Chapitre 11 n Produit scalaire
© é
diti
ons
Belin
, 201
2.
3. a. On a pour le point H′ : 3 1 2 2 3 1 4 0( ) ( ) ( )- - � � � - - �t t t qui donne t = 0 et H′(–1 ; 2 ; 1).
b. On déduit D : x tyz t
� - ��� -
�
ÌÔ
ÓÔ
121
.
4. a. De plus H vérifie : - � � �� - -- � �
�
ÌÔ
ÓÔ
1 32 4 31 1
t ss
t s qui donne
t � 2 et s � -2. D’où le point H(1 ; 2 ; –1).b. HH′ � 2 2.
5. a. MM MH HH H M HH¢ � � ¢ � ¢ ¢ � ¢ �u ruuuu u ruu u ruu u ruuuu u ruu
r
v et on a
bien HH¢ � �u ruu
r
v 0 car (HH′) est une perpendiculaire commune à D et D′.
b. MM HH HH HH¢ � ¢ �� � � ¢ � ¢ � �u ruuuu u ruu
r
u ruu u ruu
r r22
2 2v v vv2 d’où :
MM HH HH¢ � ¢ � ¢u ruuuu u ruu
r
u ruu
2 2 2 2v � .Donc la plus petite distance est bien HH′.
Préparer le BAC
Exercices guidés BAC
86 1. a. C(1 ; 1 ; 0), E(0 ; 0 ; 1), I(1 ; 0,5 ; 0) et J(0,5 ; 1 ; 0).b. M appartient au segment [CE] dont une repré-
sentation est : x ty tz t
� -� -�
�
ÌÔ
ÓÔ
11 .
2. a. CI = CJ = 0,5 et EI = EJ = 1,5.b. Tous les points de la droite (CE) appartiennent au plan médiateur donc MI = MJ.c. IM2 = t2 + (0,5 – t)2 + t2 = 3t2 – t + 0,25.3. a. Sur cet intervalle la fonction sinus est crois-
sante puis décroissante avec un maximum pour p2
.
Donc la mesure de q est maximale quand sinq2
est
maximal.b. Dans MIJ isocèle, soit K le milieu de [IJ] on a :
sinq2� IK
IM. Donc par inverse, la mesure de q est
maximale quand IM est minimale.
c. C’est une fonction trinôme donc elle est mini-
male pour t � 16
de minimum f16
16
ÊËÁˆ¯̃� .
d. On a : IM2 = f(t) donc la seule position qui donne une mesure de q maximale est pour le point
de paramètre t � 16
c’est-à-dire M056
56
16
; ;ÊËÁ
ˆ¯̃.
La distance minimale est obtenue à l’aide du pro-jeté orthogonal donc M0 est ce point.
87 1. Un point M appartient au plan si et seule-
ment si les vecteurs AMu ruu
et r
n sont orthogonaux, donc de produit scalaire nul, ce qui donne : a x x b y y c z z-� � � -� � � -� � �A A A 0 qui est de la forme : ax by cz d� � � � 0.2. a. On a : - � � � �3 2 0x y z d puis avec A on obtient : - � � � �3 2 7 0x y z .b. On remplace ses coordonnées : - ¥ � - � ¥ � �3 2 1 2 0 7 0( ) . On peut aussi
calculer les coordonnées de ABu ruu
(1 ; 1 ; 1) qui est orthogonal à
r
n.
QCM – Vrai ou faux BAC
88 1. b et c. 2. a et d.3. b et d. 4. b et c.
Exercice BAC
89 1. a. On a : x ty tz t
�� -�
�
ÌÔ
ÓÔ
1 .
b. Un vecteur normal est orthogonal aux vec-
teurs AFu ru
(0 ; 1 ; 1) et AHu ruu
(–1 ; 0 ; 1) ce qui donne
le système : b ca c� �- � ��ÌÓÔ
00 dont une solution est
(1 ; –1 ; 1) d’où l’équation : x – y + z – 1 = 0.
c. On a : t – (1 – t) + t –1 = 0 qui donne t � 23
et
le point I23
13
23
; ;ÊËÁ
ˆ¯̃. Puis EI
ur
- -ÊËÁ
ˆ¯̃
13
13
13
; ; qui est
orthogonal aux vecteurs AFu ru
et AHu ruu
donc au plan (AFH).

Chapitre 11 n Produit scalaire n 277
© é
diti
ons
Belin
, 201
2.
d. EI � 33
.
e. HIuru 2
313
13
; ; -ÊËÁ
ˆ¯̃ est orthogonal à AF
u ru
. Le triangle
AFH est équilatéral donc I est le point remar-quable de ce triangle.2. Ce tétraèdre n’est pas de type 1 car il a trois faces qui sont des triangles rectangles et une face qui est un triangle équilatéral donc les aires sont distinctes. Il n’est donc pas de type 3.Il est de type 2 car (EF) est orthogonale à (AH)
puisque EFuru
(0 ; 1 ; 0) et AHu ruu
(–1 ; 0 ; 1) sont ortho-gonaux, de même pour les autres paires de cotés opposés.
Pour aller plus loin
90 a. AC BCu ruu u ru
� � a2
2, CD BCu ruu u ru
� � - a2
2, BD MDu ru u ruu
� � a2
2
et AB AJu ruu uru
� � a2
2.
b. On a : BC AIu ru uru
� � 0 et BC DIu ru uru
� � 0 donc (BC) est orthogonale au plan (ADI).
c. AC BC CD BCu ruu u ru u ruu u ru
� � � � - �a a2 2
2 20.
d. Comme AC BC CD BC AD BCu ruu u ru u ruu u ru u ruu u ru
� � � � � on en déduit que (AD) et (BC) sont orthogonales.
91 a. Le projeté orthogonal de I est J car EFCD est un rectangle.
b. DC DI DC DJu ruu uru u ruu uru
� � � � a2
2. c. AB AK
u ruu u ruu
� � a2,
AI AL AE EI AE EL
AE A
uru u ru u ru ur u ru uru
u ru
� � �� � � �� �� �2 EE EL AE EI EI EL
u ru uru u ru ur ur uru
� � � � �
� � � � �aa a22
0 04
5 22
4
et KI KL KG GI KG GL
KG
ur u ru u ruu uru u ruu u ru
u ruu
� � �� � � �� �� 22
2
40
� � � � � �
� � �
KG GL KG GI GI GLu ruu u ru u ruu uru uru u ru
a00
4 2
2 2� �a a
.
92 a. On a : x tyz t
� -�� �
�
ÌÔ
ÓÔ
3 3010 5
.
b. Elle coupe l’axe des abscisses pour t = –2 ce qui donne le point (9 ; 0 ; 0).
c. On a : ABu ruu
(–3 ; 0 ; 5) et ACu ruu
(–3 ; 20 ; –10) qui ne sont pas colinéaires.
d. On sait que BC OHu ru u ruu
� � 0, puis on calcule
BC ODu ru u ruu
� � 0, donc (BC) est orthogonale au plan (ODH).e. Par conséquent (BC) est orthogonale à toutes les droites du plan (ODH), donc à (DH).
f. Un vecteur normal est BCu ru
(0 ; 20 ; –15) donc une équation de (ODH) est : 20 15 0y z- � ou 4 3 0y z- � .g. Un vecteur normal à (ABC) vérifie :
- � �- � - ��ÌÓÔ
3 5 03 20 10 0a ca b c
dont une solution est
(20 ; 9 ; 12) ce qui donne une équation du plan (ABC) : 20 9 12 180 0x y z� � - � .h. Ce système représente l’intersection des plans (ABC), (ODH) et (OBC) c’est-à-dire le point
H 0365
485
; ;ÊËÁ
ˆ¯̃.
93 a. Ce point est équidistant de I, J et K donc c’est le centre du cercle circonscrit au triangle IJK.b. I(0 ; 1 ; 3), J(0 ; 3 ; 1) et K(3 ; 3 ; 2).
c. PQu ru
(–1 ; 3 ; 3) est orthogonal à IJr
(0 ; 2 ; –2) et
IKuru
(3 ; 2 ; –1) donc (PQ) est orthogonale au plan (IJK).d. Les distances MI, MJ et MK sont égales ce qui donne :
x y z x y z
x y z
2 2 2 2 2 2
2 2
1 3 3 1
3 1
� - � - � � - � -� - � -
( ) ( ) ( ) ( )
( ) ( )) ( ) ( ) ( )2 2 2 23 3 2� - � - � -
�ÌÔ
ÓÔ x y z
qui se simplifie en : y zz x�� - �
�ÌÓÔ 3 6
.
e. Cet ensemble est donc une droite de représen-
tation paramétrique : x ty tz t
�� - �� - �
�
ÌÔ
ÓÔ
3 63 6
.
f. On vérifie que P et Q appartiennent à (d) pour t = 2 et t = 1.g. Un vecteur normal au plan (IJK) vérifie :
2 2 03 2 0b ca b c- �� - �
�ÌÓÔ
dont une solution est (–1 ; 3 ; 3)
ce qui donne : - � � - �x y z3 3 12 0.h. Le point Ω vérifie les équations du plan (IJK) et de la droite (d) soit : - � - � � - � - �t t t3 3 6 3 3 6 12 0( ) ( ) qui donne
t � 2419
et Ω 2419
4219
4219
; ;ÊËÁ
ˆ¯̃.

278 n Chapitre 11 n Produit scalaire
© é
diti
ons
Belin
, 201
2.
94 Partie 1.a. BDE est équilatéral car les trois côtés sont égaux comme diagonales des faces carrées.
b. x + y + z – 1 = 0. c. I13
13
13
; ;ÊËÁ
ˆ¯̃
d. Le vecteur AGu ruu
est un vecteur normal au plan (BDE) donc (AI) est orthogonale à ce plan et comme I appartient à (BDE) alors c’est le projeté de A.e. (AG) est orthogonale à ce plan.
Partie 2.a. M I1
3
� et N B13
� . b. Mk k k k; ;� �.c. x + y + z – 3k = 0.d. Nk est situé sur (Pk) et sur (BC) de représenta-
tion : xy tz
���
�ÌÔ
ÓÔ
1
0 ce qui donne : 1 + t + 0 – 3k = 0 d’où
t = 3k – 1 et le point Nk a pour coordonnées (1 ; 3k – 1 ; 0).
e. M Nk k k k ku ruuuuu
1 2 1- - -� �; ; est orthogonal aux
deux vecteurs si : 1 2 1 02 1 0- � - - �- �
�ÌÓÔ
k k kk
,
qui donne : k � 12
.
95 a. AB � 2 3 = AC = BC donc ABC est équilaté-ral. Son centre G est aux deux tiers sur une médiane, or le milieu I de [BC] est I(–1 ; 0 ; 0) donc :
AG AIu ruu uru
� 23
(–2 ; 0 ; 0) ce qui montre que G = O.
b. MA = MB donne l’équation :
( ) ( )x y z x y z- � � � � � -� � �2 1 32 2 2 2 2 2,
d’où : 3 3 0x y- � .c. NB = NC donne l’équation :
( ) ( )x y z x y z� � �� � � � � � -� � �1 3 1 32 2 2 2 2 2 d’où : y � 0.d. L’intersection des deux ensembles précédents donne que : x y� � 0, c’est donc l’axe (Oz).e. D est équidistant de A, B et C donc il est sur l’axe (Oz) et ABC étant dans le plan (xOy) il existe deux solutions pour D, symétriques par rapport à O, dont une de cote positive, soit D 0 0 2 2; ;� �.f. On a :
AM BM AC CM BC CM
AC
u ruu u ruu u ruu u ruu u ru u ruu
� � �� � � �� ��
uu ruu u ruu u ru u ruu
u ruu u ru
�� � � �� �� � �
k k
k
CD BC CD
AC BC ACC CD BC CD CDu ruu u ruu u ru u ruu u ruu
� � � �� - - �
k k
k k
2 2
6 6 6 122 12 12 62 2k k k� - � .
Par ailleurs on a : CM CDu ruu u ruu
� k d’où : M k k k- -� �1 3 3 2 2; ; par suite :
AMu ruu
k k k- -� �3 3 3 2 2; ; et
BMu ruu
k k k; ;3 2 3 2 2-� � qui donnent :
AM
BM
2 2 2 2
2 2
3 3 3 2 2
12 12 12
� - � - �� - � �
( ) ( ) ( )k k k
k k
D’où : cos( )
AMB� � - �- �
� - �- �
12 12 612 12 12
2 2 12 1
2
2
2
2k kk k
k kk k
.
g. On calcule : ¢ �-- �
f xx
x x( )
( )2 1
2 12 2, qui donne la
fonction f est décroissante puis croissante, avec
un minimum pour x � 12
.
h. L’angle est maximum si son cosinus est mini-mum ce qui correspond au même minimum
que la fonction f. Et on a : f12
13
ÊËÁˆ¯̃� qui donne
l’angle : 70,5°
96 a. ABu ruu
(2 ; 0 ; –1) et ACu ruu
(0 ; 1 ; 1) ne sont pas colinéaires donc (ABC) est un plan dont un vec-
teur normal vérifie : 2 0
0a c
b c- �� �
�ÌÓÔ
qui donne une
solution (1 ; –2 ; 2) et une équation du plan est : x – 2y + 2z – 1 = 0.b. Leurs vecteurs normaux ne sont pas colinéaires donc les plans sont sécants selon une droite.c. C appartient à (d) car il est dans les deux plans.d. Un vecteur directeur est orthogonal aux vec-teurs normaux des deux plans ce qui donne :a b ca b c- � �- � �
�ÌÓÔ
2 2 03 2 0
dont une solution est (2 ; 0 ; –1).
e. Alors : x tyz t
� ��� -
�
ÌÔ
ÓÔ
1 233
.
f. AMu ruu
r
� � - - - �u x z2 1 2 0( ) ( ) soit pour z x� 2 ce qui correspond à : 3 2 1 2- � �t t( ) donc pour
t � 15
.
g. La distance à calculer est celle entre A et le
point M de paramètre 15
c’est-à-dire 75
3145
; ;ÊËÁ
ˆ¯̃
et donc :
75
1 3 2145
2425
11625
4525
22
2
-ÊËÁ
ˆ¯̃� - � -
ÊËÁ
ˆ¯̃� � � �( )
d’où la distance est : 3 55
.

Chapitre 11 n Produit scalaire n 279
© é
diti
ons
Belin
, 201
2.
97 a. L’énoncé des milieux dans GEB donne
JK GBu ru u ruu
� 12
, le rectangle EHCB donne KL BCu ru u ru
� et le
rectangle DHFB donne IJ BFr uru
� .
b. JK GHu ru u ruu
� � 0, BF MNuru u ruu
� � 0 et IJ KLr u ru
� � 0.c. (BF) est orthogonale à (MN) et à (KL) car (KL) est parallèle à (BC) donc (BF) est orthogonale au plan (KLM).d. On en déduit que (MN) est orthogonale à (KL) et de plus (MN) est orthogonale à (IJ) car (IJ) est paral-lèle à (BF), donc (MN) est orthogonale au plan (IKL).e. IJKL est un carré donc (JK) est perpendicu-laire à (JL). De plus (JP) est parallèle à (MN) donc orthogonale à (JK) car (MN) est orthogonale au plan (IKL). Donc (JK) est perpendiculaire au plan (JPL). Comme (IL) est parallèle à (JK) alors (IL) est aussi perpendiculaire au plan (JLP) donc à la droite (LP) et le triangle ILP est rectangle en L.f. Le plan (CEF) contient la droite (MN) qui est orthogonale au plan (IJK) donc les deux plans sont orthogonaux. De même le plan (EGB) contient la droite (JK) qui est orthogonale au plan (JLP).
98 1. On calcule la distance parcourue : DR � � �6 5 612 2 , donc la vitesse est de :
618
0 98ª , m.s–1
2. a. La vitesse est : 1 4 1 3 0 6 22 2 2, , ,� � ª m.s–1.
b. ¢ �¢ �¢ �
�
ÌÔ
ÓÔ
x ty tz t
( ) ,( ) ,( ) ,
1 41 30 6
d’où : x t t ay t t bz t t c
( ) ,( ) ,( ) ,
� �� �� �
�
ÌÔ
ÓÔ
1 41 30 6
où a, b et c
sont donnés par la position initiale R ce qui
donne : x t ty t tz t t
( ) , ,( ) , ,( ) ,
� � -� � -�
1 4 2 994 11 21 3 4 505 10 40 6 �� -
�
ÌÔ
ÓÔ 1600 4 8,
.
c. Au bout de 30 s cela donne la position : xyz
( ) ,( ) ,( ) ,
30 3 024 830 4 533 630 1613 2
���
�
ÌÔ
ÓÔ
.
d. Le skieur arrivera en S quand z = 2 200 ce qui
donne : t � �604 80 6
1008,
, s c’est-à-dire qu’il
sera exactement : 15 8 16 48 15 16 56h s mn s h mn s� � � . Les
coordonnées de S sont donc : xyz
( )( )( )
1008 4 3941008 5 8051008 2 200
���
�
ÌÔ
ÓÔ
.
e. RSuru
(1 400 ; 1 300 ; 600) est 1 000 fois le vecteur
r
v .
Accompagnement personnalisé
AP 1 1. Le volume est : V
a a� ¥ ¥ �1
312
1 16
.
2. a. La relation devient :
a2 0KB BM KB KB BDu ru u ruu u ru u ru u ru
r
�� � � � �� � � , d’où :
( )a a2 22� � �BK BM BDu ru u ruu u ru
.
b. BK AM BM BD AMu ru u ruu u ruu u ru u ruu
� ��
�� � ��
�
12
2
22
2
aa
aa
AAM22
01
2� �
�a,
et de même : BK AD BM BD ADu ru u ruu u ruu u ru u ruu
� ��
�� � �� �
12
01
22
2
aa
a ���
�21
22
2AD
a,
donc : BK MDu ru u ruu
� � 0.
c. De même : ( )a a2 22� � �DK DM DBu ruu u ruu u ru
d’où :
DK AM DK ABu ruu u ruu u ruu u ruu
� � � et DK MBu ruu u ruu
� � 0.d. Ainsi les droites (BK) et (MD) comme les droites (DK) et (MB) sont perpendiculaires, ce qui montre que K est l’orthocentre du triangle MBD.
3. De même on montre que : AK MBu ruu u ruu
� � 0 et
AK MDu ruu u ruu
� � 0, ce qui montre que la droite (AK) est perpendiculaire au plan (MBD).4. a. Le triangle BDM est isocèle car
BM DM2 22
21� � � a
a, alors sa hauteur au carré
vaut : DMDB2
2 2
2
2
221 1
222
-ÊËÁˆ¯̃� � - � �a
aa
a
et donc son aire est égale à a
a
2 22�
.
b. Pour avoir une aire de 1 on obtient l’équation : a
a
2 22�
d’où : a � 63
.
Et de plus on peut calculer le volume du tétraèdre ABDM en utilisant comme base le triangle BDM et comme hauteur AK ce qui donne :
V � ¥ ¥ �13
116
AK et donc : AK � 12
.

280 n Chapitre 11 n Produit scalaire
© é
diti
ons
Belin
, 201
2.
AP 3 Partie A
1. L’existence des réels vient de la colinéarité ou de l’alignement.
2. Il suffit d’écrire MN MA AB BNu ruu u ruu u ruu u ru
� � � , puis
d’écrire que MN MNu ruu
r
u ruu
r
� � � �u v 0.3. Sa résolution montre l’unicité de la solution.4. C’est la conclusion.
Partie B1. Il suffit de considérer son vecteur directeur et un point.2. De même avec la droite d.3. Déduction d’après les vecteurs.4. On écrit que : MM′ = MH + HH′ + H′M′.
Partie C1. Les représentations paramétriques des droites
sont : ( )dx ty tz
� �� -� -
�
ÌÔ
ÓÔ
1 2
1 et ( )¢
�� �� �
�
ÌÔ
ÓÔ
dxy sz s
21 21 3
et l’intersec-
tion des systèmes n’a pas de solution donc elles ne sont pas coplanaires.
2. On a ici : 5 2 1
2 13 8a b
a b� �
- - ��ÌÓÔ
qui a pour solution : a
b
�
� -
�
ÌÔÔ
ÓÔÔ
2961
4261
.
3. Les points H et H’ correspondent à ces para-mètres sur chacune des deux droites ce qui
donne : H11961
2961
1; ; -ÊËÁ
ˆ¯̃ et ¢
ÊËÁ
ˆ¯̃
H 22361
6521
; ; .
4. On déduit pour la droite :
x t
y t
z t
� �
� - �
� - -
�
Ì
ÔÔÔ
Ó
ÔÔÔ
11961
361
2961
661
1461
et pour la distance : 6161
.
AP 4 Partie A
1. Le plan (P3) est soit parallèle aux deux autres, soit sécant aux deux autres selon deux droites qui sont parallèles entre elles.2. Si d n’est pas parallèle au plan (P3) alors le plan coupe les deux autres plans selon deux droites qui sont concourantes avec la droite d. Si d est parallèle au plan alors (P3) peut-être soit sécant aux deux autres plans selon deux droites qui sont parallèles à d, c’est le théorème du toit, soit parallèle à l’un des deux autres plans et sécant avec l’autre selon une droite parallèle à d.3. On peut donc obtenir l’ensemble vide, un point ou une droite.
Partie B1.
r
n14 1 1( ; ; ), r
n2 2 1 0( ; ; ) et r
n3 2 1 2( ; ; )- .
2. Ces deux vecteurs ne sont ni colinéaires, ni orthogonaux entre eux donc les plans se coupent selon une droite.
3. On a : 4 10 02 3 0
x y zx y� � � �� � �
�ÌÓÔ
on fixe z = t
ce qui donne :
x t
y tz t
� - -
� ��
�
Ì
ÔÔ
Ó
ÔÔÔ
72
12
4 .
4. Cette droite a pour vecteur directeur (–1 ; 2 ; 2) qui est orthogonal à
r
n3, donc elle est parallèle à ce plan.5. L’intersection des trois plans est donc vide. On est dans le cas du théorème du toit.