31/03/20151 Leçon 1: Les Systèmes Linéaires Continus Et Invariants I. Introduction I.1 Les...
16
20/06/22 1 Leçon 1: Les Systèmes Linéaires Continus Et Invariants I. Introduction I.1 Les systèmes - Définitions et exemples -Un système peut être défini comme un ensemble d’éléments exerçant collectivement une fonction déterminée. - Un système communique avec l’extérieur par l’intermédiaire de grandeurs, fonctions du temps, appelées signaux. Dans la suite, on notera par x 1 (t)...x N (t) les signaux d’entrée, et y 1 (t)...y M (t) les signaux de sortie.
-
Upload
philbert-hoarau -
Category
Documents
-
view
106 -
download
0
Transcript of 31/03/20151 Leçon 1: Les Systèmes Linéaires Continus Et Invariants I. Introduction I.1 Les...

11/04/23 1
Leçon 1: Les Systèmes Linéaires Continus Et Invariants
I. Introduction
I.1 Les systèmes - Définitions et exemples
-Un système peut être défini comme un
ensemble d’éléments exerçant
collectivement une fonction déterminée. - Un système communique avec
l’extérieur par l’intermédiaire de
grandeurs, fonctions du temps, appelées
signaux.
Dans la suite, on notera par x1(t)...xN(t) les signaux d’entrée, et
y1(t)...yM(t) les signaux de sortie.

11/04/23 2
Le système est parfaitement connu quand on peut prédire ces signaux de
sortie, c’est-à-dire lorsqu’on connaît les relations entre les xi et les yj
Exemple
l’équilibre électrique du circuit se traduit par l’équation
avec
on a donc l’équation du système :
)(),...,()(
...
)(),...,()(
1
111
txtxfty
txtxfty
NMM
N
)()( tvvtiR es
t
s dtiC
tv0
1)(
)()( tvtvdt
dvCR es
s
dt
tdvCti s )( ?
??

11/04/23 3
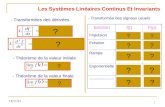
I.2 Les systèmes linéaires
Un système est dit linéaire si sa réponse à une combinaison linéaire de signaux d’entrée est égale à la combinaison linéaire des signaux de sortie
Ainsi si on applique à l’entrée:
x(t) = u.x1(t) + v.x2(t)
(u, v: deux constantes )
On obtiendra en sortie
y(t) = u.y1(t) + v.y2(t)
Cette propriété des systèmes linéaires est aussi appelée principe de superposition
I.3 Les systèmes invariants
Un système est dit invariant si sa réponse à un signal x(t) différé d’un
temps est la même que la réponse y(t) du système mais différée de
Un système invariant est aussi appelé système à constantes localisées
Cette propriété des systèmes invariants est aussi appelée principe de permanence
?

11/04/23 4
II. Signaux canoniques
Pour caractériser le comportement d’un système donné, on étudie sa réponse à des signaux particuliers
appelés "signaux canoniques’’:l’échelon; la rampe; le signal
sinusoïdal et l’impulsion
II.1 L’échelon - réponse indicielle
La fonction échelon permet de soumettre le système à une entrée
constante depuis t = 0.
e(t) = E0 *u(t)
u(t) : fonction de Heaviside
u(t) = 0 pour t < 0 u(t) = 1 pour t > 0
II.2 La rampe - réponse en vitesse
Ce signal est le signal de base permettant d’analyser la réponse d’un système en vitesse
e(t) = a*t *u(t)
II.3 Signal sinusoïdal
Ce signal est le signal de base de l’étude fréquentielle des systèmes linéaires
e(t) = K sin(wt) u(t)
?
?
?

11/04/23 5
II.4 L’impulsion de Dirac
Cette fonction, permet de simuler l’effet d’une action s’exerçant durant un temps très bref (choc ; impulsion). La réponse est dite
impulsionnelle.
100
dttettt

11/04/23 6
III. Transformation de Laplace
La transformée de Laplace permet de remplacer les équations différentielles qui relient les grandeurs caractéristiques de nos
systèmes par des relations à base de fractions rationnelles.
III.1 Définition
Considérons une fonction f de la variable réelle t supposée nulle pour les valeurs négatives de t.La transformée de Laplace de f, notée F est une fonction de la variable complexe p définie par :
Cette fonction n’est définie que pour les valeurs de p telles que l’intégrale converge
la transformée inverse de F(p) est définie par: Exemple : cherchons la transformée de
Laplace de la fonction f(t) = e−at
dttfetfLpF pt 0
0lim
tfe pt
t
dpepFj
pFLtfjw
jw
pt
211

11/04/23 7
III.2 Propriétés de la T.L
1. Linéarité: si f et g ont des transformées
de Laplace alors :
2. Transformée de la dérivée :
Montrer que:
Pareillement on aura :
3. Transformée de l’intégrale :
Soit :
On exploitant la formule de la Transformée du dérivée montrer que:
4. Théorème du retard
5. Théorèmes des limites – Théorème de la valeur initiale :
– Théorème de la valeur finale :
pGbpFatgbtfaL
tfuetedv pt
0fpFpdt
dfL
0'022
2
ffppFpdt
fdL
dxxftgt
0
011g
ppF
ppGdttfL
pFeTtfL pT
ppFtfpt
limlim0
ppFtfpt 0limlim
? ?
On procédant par une intégration par partie du transformé de la fonction f(t) en prenant

11/04/23 8
III.3 T.L. des signaux usuels
Echelon unitaire
Impulsion de Dirac
III.4 Recherche de l’originale d’une transformée de Laplace
Rampe
20
)(p
kdtktepF pt
Signal sinusoïdal
22)(
p
pF
Les T.L. se présentent généralement sous forme d’une fraction rationnelle.
il suffit ensuite de décomposer la fraction en éléments simples :
Nous cherchons ainsi les correspondants des termes dans le tableau des transformées usuelles
1.0
00
00
dttedtetdtet pt
p
pF1
...
...
21
21
pppp
zpzppF
...21
pp
B
pp
ApF
?
?

11/04/23 9
1. Cas des pôles simples
On suppose pour commencer que d°(N(p))<d°(D(p)) et que les pôles pi de F(p) sont simples:
On peut alors toujours écrire :
On en déduit :
Application
Rechercher l’originale des fonctions et
jisippavec
pppppp
pNpF ji
m
...21
m
m
pp
A
pp
A
pp
ApF
...
2
2
1
1 ippii pppFA
Avec
teAeAeAtf tpm
tptp m ...2121
23
12
pp
pF 4
12
p
ppF
?

11/04/23 10
2. Cas des pôles doubles
Supposons maintenant qu'on a toujours d°(N(p))<d°(D(p)), mais que F(p) possède des pôles doubles
Ainsi la contribution des fractions simples dues aux pôles doubles sont :
Application
Rechercher l’originale de la fonction
...... 2
ipp
pNpF
...... 2
21
i
i
i
i
pp
A
pp
ApF
ipp
nii pppFA
2Avec
ipp
ni
i dp
pppFdA
1
...... 21 tetAeAtf tpi
tpi
ii
44
32
pp
ppF
?

11/04/23 11
3. Cas d’une fraction rationnelle quelconque
Dans le cas au d°(N(p))≥d°(D(p)) Il suffit de diviser le polynôme N(p) par D(p)
L'inversion de la fraction rationnelle en R(p) se fait comme précédemment, et l'inversion de Q(p) donne:
Application
Rechercher l’originale de la fonction
pD
pRpQpF Avec DdRd
......10 kk pqpqqpF
......'10 tqtqtqtf kk
12
3432
23
pp
ppppF
?

11/04/23 12
IV. Les Transmittances Opérationnelles
La transmittance opérationnelle (ou fonction de transfert) désigne le rapport sortie sur entrée dans le domaine de Laplace
La forme initiale de l’équation différentielle est :
Appliquons l’opérateur de Laplace à cette équation:
(C(p) polynôme en p) En prenant l’hypothèse de conditions initiales nulles
m
m
m
n
n
n
dt
txdb
dt
tdxbtxb
dt
tyda
dt
tdyatya
...
...
10
10
pCpXpbpXpbpXb
pYpapYpapYam
m
nn
...
...
10
10
n
n
mm
papaa
pbpbb
pX
pYpH
...
...
10
10 0pC
?
?

11/04/23 13
V. Le minimum à apprendre
- Transformée de Laplace
dttfetfLpF pt 0
- Transformée inverse
dpepFj
pFLtfjw
jw
pt
211
- Transformées des dérivées
0fpFpdt
dfL
0'022
2
ffppFpdt
fdL
- Transformée de l’intégrale
011g
ppF
ppGdttfL
- Théorème du retard
- Théorème de la valeur initiale
pFeTtfL pT
ppFtfpt
limlim0
- Théorème de la valeur finale
ppFtfpt 0limlim
?
?
?
?
?
?
?
?

11/04/23 14
- Transformée des signaux usuels
fonction f(t) F(p)
Impulsion 1
Echelon E0 . u(t)
Rampe a . t . u(t)
Sinus K sin(wt) u(t)
Exponentielle e−at
------------------ t . e−at
t
p
E0
2p
a
22 p
k
- Transformée d’une équation
Exemple
m
m
m
n
n
n
dt
txdb
dt
tdxbtxb
dt
tyda
dt
tdyatya
...
...
10
10
pCpXpbpXpbpXb
pYpapYpapYam
m
nn
...
...
10
10
- l’originale d’une transformée
Exemples
23
12
pp
pF 44
32
pp
ppF
12
3432
23
pp
ppppF
f(t)=?
ap 1
21
ap
? ?
? ?
? ?
? ?
??
??
?

VI. Application
Soit le circuit RLC suivant, tel que:
R=4,7 k, L=50 mH, C=2,2nF
1- Etablir l’équation différentielle
liant la tension au borne du
condensateur s(t) à la tension
d’entrée e(t).
2- Utiliser la transformé de
Laplace pour écrire l’expression
de S(P) en fonction de E(P).
3- On suppose que l’on applique,
à t=0s, un échelon d’amplitude 5V
en entrée du circuit initialement au
repos. Donner l’expression de S(t)
solution de l’équation différentielle
établie précédemment.
e(t)
s(t)

www.aicme-tunisie.ass0.fr
Une version numérique de ce cour (pdf+ppt) est publiée sur le site de :
l’Association Internationale des Chercheurs en Mécanique et Energie (AICME)