03/01/2014 1 - Transformées des dérivées - Théorème de la valeur initiale - Théorème de la...
18
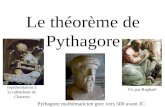
26/06/22 1 - Transformées des dérivées 0 f p F p dt df L 0 ' 0 2 2 2 f f p p F p dt f d L - Théorème de la valeur initiale p pF t f p t lim lim 0 - Théorème de la valeur finale p pF t f p t 0 lim lim ? ? ? ? Les Systèmes Linéaires Continus Et Invariants - Transformée des signaux usuels fonction f(t) F(p) Impulsion 1 Echelon E 0 . u(t) Rampe a . t . u(t) Exponentie lle e −at ---------- -------- t . e −at t p E 0 2 p a a p 1 2 1 a p ? ? ? ? ? ? ? ? ? ?
-
Upload
adelie-barbier -
Category
Documents
-
view
111 -
download
2
Transcript of 03/01/2014 1 - Transformées des dérivées - Théorème de la valeur initiale - Théorème de la...

11/04/231
- Transformées des dérivées
0fpFpdt
dfL
0'022
2
ffppFpdt
fdL
- Théorème de la valeur initiale
ppFtfpt
limlim0
- Théorème de la valeur finale
ppFtfpt 0limlim
?
?
?
?
Les Systèmes Linéaires Continus Et Invariants
- Transformée des signaux usuels
fonction f(t) F(p)
Impulsion 1
Echelon E0 . u(t)
Rampe a . t . u(t)
Exponentielle e−at
------------------ t . e−at
t
p
E0
2p
a
ap 1
21
ap
? ?
? ?
? ?
??
??

11/04/23 2
Déplacement d’un comparateur d’amont en aval d’un bloc
+- pX 3)(1 pX
)(2 pX
H(p) +- pX 3)(1 pX
)(2 pX pH
1
H(p)
?
Les schémas fonctionnels
Déplacement d’un comparateur d’aval en amont d’un bloc
+- pX 3)(1 pX
)(2 pX
H(p) +- pX 3)(1 pX
)(2 pX pH
H(p)
?

11/04/23 3
+ - pXpX r)( pX
)( pX r
A(p) )( pY
B(p)
pBpApA
pH
1
??
- Schéma fonctionnel d’un système automatisé
- Fonction de transfert

11/04/23 4
txKty • Equation de l’intégrateur
• Système du premier ordre
pk
pH
1
- Temps de réponse à ±5%: tr = 3
- Temps de montée: (90% de k) tm = 2,3
Réponse à une rampe
?
?
?
?(Réponse indicielle)
- Fonction de
transfert- Allures des courbes Réponse
à une impulsion
Analyse Temporelle

11/04/23 5
• Système du second ordre
1
2
020
2
pww
p
kpH
- si 1 : système hyper-amorti.
- Si < 1 : système sous-amorti
La réponse est apériodique
La réponse est pseudo-périodique
?
?
?
?
?
- Fonction de transfert
Temps de montée
21
12
0Wtm ?
arcsinAvec ?

11/04/23 6
Temps du premier maximum (ou temps de pic)
20 1
W
tPic
Dépassements
21max1
eKSSD
Pseudo période
20 1
22
WW
Ta
P
21max1 100100%
e
S
SSD
?
? ?
?

wtXtx sin0 wtYty sin0Si
jwHXY 00 Avec
* Système intégrateur
wKGdb log20log20
90
* Entrée sortie
p
KpH
?
?
? ?
?
jwH
jwHArctg
jwHArg
Re
Im
?
Analyse Harmonique

Lieu de Bode d’un système intégrateur

Diagramme asymptotique d’un système du premier ordre
G (dB)
(°)
log(w)
log(w)
20 log(k)
W=1/
0°
-90°
-45°
* Système du premier ordre 21 w
KjwH
?

* La bande passante
La bande passante à xdb est :
xdbMaxdbfGMaxdbfBP ;
* Système du second ordre
- cas de racines réelles 1
jwHjwHKjwH 21
?

Diagramme asymptotique d’un système du second ordre (racines réelles)
(°) log(w)
G (dB)
log(w)20 log(k)
W=1/
W=1/
droite de pente -20 dB/dec droite de pente -40 dB/dec
0°
-180°
-90°

- cas de racines complexes <1
G (dB)
(°)
log(w)
log(w)0°
-180°
-90°
Diagramme asymptotique d’un système du second ordre (racines complexes)
20 log(k)
W=w0
droite de pente -40 dB/dec

- Facteur de résonance
7,0Pour on définit le facteur :2212
1
M? ?
- Pulsation de résonnance 20 21 wwr ?

11/04/23 14
* Critère de Routh
Condition1:
Une condition nécessaire de stabilité est que les coefficients ai du polynôme soient de même signe
Condition2:
Le système est stable si tous les éléments de la première colonne du tableau de Routh sont de même signe
Performances des Systèmes Asservis

11/04/23 15
0002
001
00
01
02
.
.
.
4
3
00...2
0...1
1
1
321
321
7531
0642
n
un
tn
ssn
rrn
dddd
cccc
aaaa
aaaaa
lignedeN
n
n
nn
nn
nnnn
nnnn
nnnn
nnnn
Tableau de Routh
Avec
1
321
22
n
inn
inn
in a
aa
aa
c
n
inn
inn
in c
cc
aa
d 1
321
n
inn
inn
in d
dd
cc
e 1
1
?
?
?
?
?

11/04/23 16
* Critère du Revers
On utilise le lieu de Nyquist pour la FTBO et la courbe ne doit pas envelopper le point critique (-1,0) dans le plan complexe pour que le système en boucle fermée soit stable
* Marge de gain
BdBG Re1log20
* Marge de phase
180AAOB
pHpG
pXpE1
1
* Forme de l’erreur
?
?
?

11/04/23 17
* Erreur en régime permanent
pHpG
pPXte
Pt 1limlim
0 P
KpHpGFTBO
Pour obtenir une erreur
faible en régime
permanent il faut
augmenter les valeurs de
K et ce qui s’oppose à
la condition de stabilité
Erreur de position
Erreur de traînage
Erreur d’accélération
20 1
K1
1 0 0? ? ?
K
1 0
?
? ? K
1
? ?
?
?

KpC
Type Equation Effet
P Stable pour des valeurs de
K bien déterminé
PI Précis
PD Rapide
PID Précis et rapide
PTKpC
i
11
PTKpC d 1
PT
PTKpC d
i
11?
?
?
?
Correction des Systèmes Asservis