1. Introduction Quelques rappels et définitionsblondin/files/8map110/staylor.pdf · Les séries de...
13
SÉRIES DE TAYLOR YVES CHIRICOTA 1. Introduction Les séries de Taylor représentent un des outils de base pour calculer les fonctions à une ou plusieurs variables. Elles permettent de plus de faire l’analyse fine des fonctions. 2. Quelques rappels et définitions Pour analyser les séries, il faut définir les suites de nombres réels. Une suite de nombres réels est un vecteur infini de nombres réels de la forme (a k ) k∈N =(a 0 ,a 1 ,a 2 ,...), où a k ∈ R est un terme de la suite (terme est synonyme de “composante” si on voit la suite comme un vecteur). On appelle k le rang du terme a k . Notons que cette définition est équivalente à avoir une fonction a : N → R qui associe à chaque entier n ∈ N un nombre réel R. Voici quelques exemples de suites de nombres réels: • a k =2k; (a k ) k∈N = (0, 2, 4,...), • a k = 1 1+k ; (a k ) k∈N = (1, 1 2 , 1 3 , 1 4 ,...), • a k = 1 1+k 2 ; (a k ) k∈N = (1, 1 2 , 1 5 , 1 10 ,...), 1
Transcript of 1. Introduction Quelques rappels et définitionsblondin/files/8map110/staylor.pdf · Les séries de...

SÉRIES DE TAYLOR
YVES CHIRICOTA
1. Introduction
Les séries de Taylor représentent un des outils de base pour calculer les fonctionsà une ou plusieurs variables. Elles permettent de plus de faire l’analyse fine desfonctions.
2. Quelques rappels et définitions
Pour analyser les séries, il faut définir les suites de nombres réels. Une suite denombres réels est un vecteur infini de nombres réels de la forme
(ak)k∈N = (a0, a1, a2, . . .),
où ak ∈ R est un terme de la suite (terme est synonyme de “composante” si onvoit la suite comme un vecteur). On appelle k le rang du terme ak. Notons quecette définition est équivalente à avoir une fonction
a : N→ R
qui associe à chaque entier n ∈ N un nombre réel R.
Voici quelques exemples de suites de nombres réels:
• ak = 2k; (ak)k∈N = (0, 2, 4, . . .),
• ak = 11+k
; (ak)k∈N = (1, 12, 1
3, 1
4, . . .),
• ak = 11+k2 ; (ak)k∈N = (1, 1
2, 1
5, 1
10, . . .),
1

2 YVES CHIRICOTA
On constate que certaines suites se stabilisent vers une valeur. Lorsque c’est lecas, on dit que la suite converge vers la valeur en question. Par exemple, la suitedéfinie par ak = k+2
k+1est (2, 3
2, 4
3, 5
4, 6
5, 7
6, . . .) et converge vers 1. En fait, voici les
premiers termes de cette suite sous forme de vecteur:
(2., 1.50, 1.33, 1.25, 1.20, 1.17, 1.14, 1.12, 1.11, 1.10, 1.09, 1.08, 1.08, 1.07, 1.07, 1.06,1.06, 1.06, 1.05, 1.05, 1.05, 1.05, 1.04, 1.04, 1.04, 1.04, 1.04, 1.04, 1.03, 1.03, 1.03, . . .)
On constate qu’effectivement, les termes de la suite semblent se stabiliser lente-ment vers 1. Qu’est-ce qui nous assure qu’en calculant plus termes dans la suiteles valeurs ne se mettrons pas à augmenter et à s’éloigner de 1 ?
La définition suivante répond à la question en donnant un sens précis à la notionde convergence: On dit que la suite (ak)k∈N converge vers le nombre A ∈ R si,quelque soit ε > 0, il existe N ∈ N tel que quelque soit k > N , on a |ak − A| < ε.On écrit alors lim
n→∞ak = A.
En d’autres termes, si limn→∞
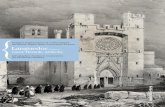
ak = A, alors, étant donné une précision ε aussi pe-tite que l’on désire, nous avons qu’à partir d’un certain N , tous les termes de lasuite de rang supérieur à N sont à une précision meilleure que ε de A. Dans ladéfinition précédente, l’expression |ak − A| est la distance entre le terme ak et A.Cette distance est assimilable à l’erreur d’approximation commise sur la valeur Alorsqu’on l’approche avec la suite. La figure 1 illustre la situation.
ak
k0 1 2 3 4 5 6 N
A
ε
Figure 1. Pour valeur de ε donnée, toutes les valeurs de la suite derang supérieur à N seront dans la bande définie par A + ε et A − ε,et quelque soit la valeur de ε, on trouvera un tel N (qui peut être trèsgrand selon la suite).

SÉRIES DE TAYLOR 3
Voici un exemple d’application à la suite k+2k+1
. Supposons que la précision désiréesoit ε > 0, un très petit nombre. Il faut montrer qu’à partir d’un certain rang N , ona |ak − 1| < ε si k > N . Or on a
ak − 1 =k + 2
k + 1− 1 =
1
k + 1.
On veut donc 1k+1
< ε. Il s’en suit qu’en prenant k > 1ε− 1, on aura ak − 1 < ε.
Donc, la suite converge bien vers 1.
Par exemple, si ε = 0.0001, en prenant k > 10.0001
− 1 = 9999, tous les termes dela suites de rang supérieur à 9999 seront à distance plus petite que ε = 0.0001 deA = 1.
Et c’est vrai quelque soit ε; aussi petite que soit cette valeur, il sera possible detrouve le rang à partir duquel les termes de la suite seront à distance plus petiteque ε de 1.
3. Séries de nombres réels
Une série réelle est une somme infinie de la forme∞∑k=0
ak,
où ak ∈ R. Une des grandes utilités des séries est de représenter des nombresréels. Grâce à elles, il est possible de calculer le développement décimal decertains nombres, comme le célèbre nombre π.
Voici quelques exemples de séries réelles:
•∞∑k=0
k
•∞∑k=0
1k
•∞∑k=0
(−1)k
2k+1

4 YVES CHIRICOTA
Certaines séries convergent et d’autres pas. Par exemple,∞∑k=0
k = 1 + 2 + 3 + · · · =∞.
Cependant, on peut démontrer que
π = 4∞∑k=0
(−1)k
(2k + 1).
Note: le nombre π peut être représenté par un grand nombre d’autres séries.
Pour déterminer la convergence d’une série on utilise les limites et la suite des
sommes partielles. Considérons la série∞∑k=0
ak. La suite des sommes partielles
(sn)n∈N est définie par
sn =n∑k=0
ak = a0 + a1 + a2 + · · ·+ an.
C’est bien une suite au sens de la définition décrite plus haut.
On dira que∞∑k=0
ak = S ⇔ limn→∞
sn = S. En d’autres mots, la limite d’une série est A
si et seulement si la suite des sommes partielles converge vers S. Les suites nousfournissent donc un outil pour établir la convergences des séries qui elles serventà représenter et calculer certains nombres réels importants comme le fameux π.Plus grande est la précision désirée dans le développement décimal du nombre,plus il faudra calculer de termes dans la suite des sommes partielles.
Par exemple, on constate que si sn = 4∑n
k=0(−1)k
(2k+1), alors on a que |sn − π| ∼= 1
n.
Bref, à chaque fois que l’on multiplie par 10 le nombre de termes dans la sommepartielle de cette série, on gagne une décimale de précision dans le calcul de π.La convergence lorsque l’on utilise cette séries pour évaluer le nombre π est trèslente. Il existe d’autres représentation de π par des séries qui convergent beau-coup plus vite (voir par exemple http://functions.wolfram.com/Constants/Pi/06/01/01/).
Question: Combien de décimales de π = 3.14156 . . . connaissez-vous par coeur ?Si vous croyez en connaitre beaucoup, visitez ce site:http://www.foxnews.com/story/0,2933,217765,00.html). Un japonais à pris 16 heureà réciter 100000 décimales de π par coeur. En passant, il n’y a absolument aucune

SÉRIES DE TAYLOR 5
répétition ni motifs dans ce développement décimal car π n’est pas un nombre ra-tionnel. ;-)
4. Représentation des fonctions réelles à l’aide des séries de Taylor
De la même façon qu’il est possible de représenter les nombres réels à l’aide deséries, on peut utiliser celles-ci pour représenter les fonctions réelles continueset différentiables f : I −→ R. Les séries de Taylor servent à cette fin. Il existeaussi d’autre types de séries, pour les fonction périodiques par exemple (ce sontles séries de Fourier). Dans ce document, nous nous limiterons aux séries deTaylor. Ces séries peuvent être utilisées pour calculer diverses fonctions commeentre autres les fonctions trigonométriques. Nous écrirons f (k)(x) pour désignerla dérivée dk
dxk f(x).
Soit f : I −→ R, où I ⊂ R est un intervalle ouvert, une fonction réelle continueet dont toutes les dérivées f (k)(a) existent. La série de Taylor autour de a ∈ I def(x) est définie par
∞∑k=0
f (k)(a)
k!(x− a)k.
On peut montrer que toutes les dérivées de la série de Taylor de f(x) coïncidentavec celles de f(x) lorsque x = a. Cette condition est tellement forte qu’elle nousassure l’égalité entre la série et la fonction sur tout son domaine de définition.
Le polynôme Pn =n∑k=0
f (k)(a)k!
(x− a)k est appelé polynôme de Taylor de la fonction
f(x). On peut approximer f(x) à l’aide des polynômes de Taylor. Remarquonsque quelque soit n, on a f(a) = Pn(a). En fait, il est facile de voir que les dérivéesd’ordre 0 à n de Pn coïncident avec celles de f(x) lorsque x = a.
Le théorème suivant est important, il nous permet de représenter les fonctionssous forme de séries de Taylor. On parle du développement de Taylor de f autourde x = a.
Théorème: Soit f : I −→ R une fonction continue sur un intervalle ouvert, alors
f(x) =∞∑k=0
f (k)(a)
k!(x− a)k.

6 YVES CHIRICOTA
Ce théorème, dont la démonstration dépasse le cadre du cours, nous permet decalculer des valeurs approximatives de fonctions f(x) en considérant les sommespartielles.
Considérons par exemple la fonction sin(x). Le développement en série de Taylorde sin(x) autour de x = 0 est donné en calculant les dérivées de sin(x) évaluéesen x = 0. On trouve
sin(0) = 0,
d
dxsin(x) |x=0 = cos(0) = 1,
d2
dx2sin(x) |x=0 = − sin(0) = 0,
d3
dx3sin(x) |x=0 = − cos(0) = −1,
d4
dx4sin(x) |x=0 = sin(0) = 0,
d5
dx5sin(x) |x=0 = cos(0) = 1 . . .
On obtiendra par récurrence que
dk
dxksin(x) |x=0 =
{0 si k est pair,
(−1)(2k+1) si k est impair
On obtient
sin(x) =∞∑k=1
(−1)k+1
(2k − 1)!x(2k − 1) = x− 1
3!x3 +
1
5!x5 − 1
7!x7 + · · ·
Posons Pn(x) =n∑k=0
(−1)k+1
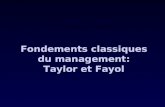
(2k−1)!xk, le polynôme de Taylor de la fonction sin(x). Plus n
est élevé, meilleure est l’approximation. La figure 2 suivant représente sin(x) (envert) et les polynômes P1, P2, P3 (en rouge, jaune et bleu respectivement).
Remarquons que si on divise la série par x, on ontient une représentation de lafonction sin(x)
x= 1− 1
3!x2 + 1
5!x3− 1
7!x7 + · · · . Ceci explique le fait que lim
x→0
sin(x)x
= 1,

SÉRIES DE TAYLOR 7
Figure 2.
car
limx→0
sin(x)
x= lim
x→0
(1− 1
3!x2 +
1
5!x3 − 1
7!x7 + · · ·
)= 1 + 0 + 0 + 0 + · · ·
Intéressant, n’est-ce pas? ;-)
4.1. Analyse de l’erreur. L’erreur commise dans l’approximation d’une fonctionf(x) et son polynôme de Taylor Pn(x) est donné par
f(x)− Pn(x) =∞∑
k=n+1
f (k)(a)
k!(x− a)k = Rn(x).
C’est le reste des termes de la série de Taylor de f(x) (ceux qui n’apparaissentpas dans le polynôme de Taylor).
Si on désire évaluer l’erreur dans l’approximation d’une fonction par son polynôme
de Taylor, il faudrait donc calculer le sérieRn(x) =∞∑
k=n+1
f (k)(a)k!
(x−a)k. Le théorème
suivant nous évite le calcul de la série précédente.

8 YVES CHIRICOTA
Théorème du reste. Il existe un nombre ξ ∈ [a, x] tel queRn(x) = f (n+1)(ξ)(n+1)!
(x−a)n+1.
Ce théorème nous permet de borner l’erreur d’approximation commise lorsqu’onapproxime la valeur de f(x) à partir du développement en série de Taylor def autour de x = a. Notons que le nombre ξ du théorème dépend de x. Parexemple, pour la fonction sin(x), le théorème nous dit qu’il existe ξ ∈ [0, x] telque |Rn(x)| =
∣∣∣f (k+1)(0)(k+1)!
xk+1∣∣∣. Dans ce cas f (k+1)(0) = ± cos(0) ou ± sin(0), car
f(x) = sin(x). Il s’en suit que∣∣f (k+1)(0)
∣∣ ≤ 1. Finalement, on a
|Rn(x)| =∣∣∣∣f (k+1)(0)
(k + 1)!xk+1
∣∣∣∣ ≤ ∣∣∣∣ xk+1
(k + 1)!
∣∣∣∣ .On a une borne pour l’erreur commise sur l’approximation de la fonction sin(x).Par exemple, si on utilise P10 pour évaluer sin(0.2), l’erreur sera au plus (0.2)11
11!∼=
5.1× 10−16.
En posant h = x− a, la série de Taylor de f peut aussi s’écrire sous la forme
f(a+ h) =∞∑k=0
f (k)(x)
k!hk.
Sous cette forme,
f(a+ h) = Pn(a+ h) +Rn(a+ h) =n∑k=0
f (k)(a)
k!hk +
f (n+1)(ξ(h))
(n+ 1)!hn+1,
où ξ ∈ [a, a+ h].
Voici un autre petit exemple intéressant de série de Taylor.
ex = 1 + x+x2
2!+x3
3!+x4
4!+ . . .+
xk
k!+ · · · .
Exercice: (1) Calculez cette série à partir de la définition.
5. Séries de Taylor de fonctions à deux variables
Les séries de Taylor servent à représenter non seulement les fonctions à une vari-able, mais aussi les fonctions de plusieurs variables de la forme f : D −→ R, où

SÉRIES DE TAYLOR 9
D ∈ Rn (dans notre cas, n = 2 ou n = 3). Dans ce qui suit, nous travaillerons dansle cas n = 2 et nous considérerons que ∇ est le vecteur des dérivées partielles
∇ =
(∂
∂x,∂
∂y
).
Cette écriture est pratique et compatible avec notre définition de gradient, parexemple pour f = f(X) = f(x, y):
∇f =
(∂
∂x,∂
∂y
)f =
(∂f
∂x,∂f
∂y
).
Le théorème suivant établit la formule de Taylor dans le cas d’une fonction de deuxvariables. Il se généralise directement n variables, pour n quelconque.
Théorème. Soit f : D −→ R, où D est un sous ensemble ouvert de R2. Sup-posons que toutes les dérivées partielles de f existent et sont continues. SoitX = (x, y) ∈ D et H = (h1, h2) un vecteur de R2 tel que X + tH ∈ D quelque soitla valeur de t ∈ [0, 1]. Alors
f(X +H) =∞∑n=0
(H · ∇)nf(X)
n!
= f(X) +(H · ∇)f(X)
1!+
(H · ∇)2f(X)
2!+ . . .
· · · +(H · ∇)nf(X)
n!+
(H · ∇)n+1f(X + αH)
(n+ 1)!
où α ∈ [0, 1].
Remarquons que la notation ∇ =(∂∂x, ∂∂y
)est utile ici car elle facilite le calcul de
(H · ∇)k qui devient tout simplement
((h1, h2) ·
(∂
∂x,∂
∂y
))k=
(h1
∂
∂x+ h2
∂
∂y
)k.

10 YVES CHIRICOTA
Par exemple, calculons les termes linéaire et quadratique du développement ensérie d’une fonction f .
(H · ∇)f =
((h1, h2) ·
(∂
∂x,∂
∂y
))f
=
(h1
∂
∂x+ h2
∂
∂y
)f
= h1∂f
∂x+ h2
∂f
∂y
et
(H · ∇)2f =
((h1, h2) ·
(∂
∂x,∂
∂y
))2
f
=
(h1
∂
∂x+ h2
∂
∂y
)2
f
=
(h2
1
∂2
∂x2+ 2h1h2
∂2
∂x∂y) + h2
2
∂2
∂y2
)f
= h21
∂2f
∂x2+ 2h1h2
∂2f
∂x∂y+ h2
2
∂2f
∂y2
À partir du calcul précédent, on peut écrire le polynôme de Taylor de degré 2 d’unefonction f = f(X) développée autour d’un point X = (x, y) évaluée en X +H:
f(X +H) = f(X) + h1∂f
∂x(X) + h2
∂f
∂y(X)
+h2
1
2
∂2f
∂x2(X) + h1h2
∂2f
∂x∂y(X) +
h22
2
∂2f
∂y2(X)
+O(h31, h
32),
où O(h31, h
32) est le terme d’erreur (dominé par la partie cubique de la série).
Remarque: On constatera que la partie linéaire du développement en série deTaylor de f(x, y) est l’interpolant linéaire L(x, y).
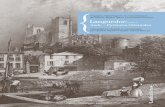
Exemple. Calculons le développement en série de Taylor de degré 2 de la fonctionf(x, y) = e−(x2+y2) autour de X = (0, 0) et utilisons ce polynôme pour calculer uneapproximation f au point ( 1
10, 1
10).
Calculons d’abord les dérivées partielles:

SÉRIES DE TAYLOR 11
∂f
∂x= −2xe−(x2+y2)
∂f
∂y= −2ye−(x2+y2)
∂2f
∂x2= −2e−(x2+y2) + 4x2e−(x2+y2)
∂2f
∂y2= −2e−(x2+y2) + 4y2e−(x2+y2)
∂2f
∂x∂y= 4xye−(x2+y2)
On a donc, avec X(0, 0), f(X) = 1), ∂f∂x
(X) = 0, ∂f∂y
(X) = 0, ∂2f∂x2 (X) = −2,
∂2f∂y2
(X) = −2, ∂2f∂x∂y
(X) = 0. Finalement on trouve
f(X +H) ∼= p2(X +H) = 1− (h21 + h2
2).
Évaluons maintenant la fonction à l’aide du polynôme au point X + ( 110, 1
10) =
( 110, 1
10). La figure 3 illustre les deux fonctions (celle du haut est f et celle du bas
est p2).
Figure 3.

12 YVES CHIRICOTA
On trouve z = f( 110, 1
10) = 0.9801986733 . . . et z∗ = p2(
110, 1
10) = 0.98. D’où une
erreur absolue z− z∗ ∼= 0.001986733 et une erreur relative z−z∗z∼= 0.0002026867669.
L’oeil averti aura remarqué que, puisque
et = 1 + t+t2
2+ · · · ,
on obtient directement p2 en remplacant t par h21 + h2
2 dans le développement ensérie de Taylor de et et en ne conservant que la partie quadratique du résultat.
6. Exercices
1. Montrez que la partie linéaire du développement en série de Taylor de f(x, y)est l’interpolant linéaire L(x, y).
2. Calculez le polynôme p4 de Taylor de log(1+x) autour de x = 0 (log est en basee). Évaluez p4 au point 0.2, donnez l’erreur absolue et relative. Evaluez l’erreur àl’aide du théorème du reste.
3. Calculez la partie quadratique du développement de Taylor de la fonctionf(x, y) = y2+y sin(x) autour du point (0, 1). Donnez une approximation de (0.1, 1.1)à l’aide du polynôme. Donnez l’erreur absolue et relative.

SÉRIES DE TAYLOR 13
Solutions.
1. En fait c’est direct. On a vu que (voir livre de Steward) qu’étant donnée unefonction f(x, y), le plan tangent au point (a, b) est défini par L(x, y) = f(a, b) +fx(a, b)(x − a) + fy(a, b)(y − b). Pour conclure, il suffit de prendre X = (a, b) et(h1, h2) = (x− a, y− b). L(x, y) devient L(X +H) = f(X) + fx(X)h1 + fy(X)h2 cequi est bien la partie linéaire du développement en série de Taylor de f .