






Langages
Pages
Légal


Comportement du solides déformable
Résistance des matériaux (RDM)
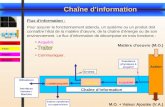
AGIR
Chaîne d’information
Chaîne d’énergie
ACQUERIR TRAITER COMMUNIQUER
ALIMENTER DISTRIBUER CONVERTIR TRANSMETTRE
Suite

I But de la RDM
La résistance des matériaux est l'étude de la résistance et de la déformation des solides (arbres de transmission, bâtiments, fusées). Cela permet donc de :
Suite
• Déterminer les dimensions fonctionnelles de la pièce • Choisir le matériau constituant la pièce • Vérifier la résistance à la "casse" de la pièce :
(Dépassement de la limite à la résistance élastique du matériau) • Vérifier la résistance à la "déformation" de la pièce
• Vérifier la résistance à la "fatigue" de la pièce : (Rupture après un certain nombre de cycles de déformation)
• Optimiser le coût de la pièce par changement des formes, des dimensions, des matériaux, ...

I But de la RDM Suite
Contraintes subies par l’aile
d’avion
Déformations subies par l’aile
d’avion

I But de la RDM Suite
Vérification de la résistance d’une aile d’avion

I But de la RDM Suite
Répartition des contraintes dans la pièce sous charges

II Les hypothèses de la RDM Suite
1 La géométrie des pièces :
Pour tous les calculs RDM, on utilise le modèle « Poutre » (solides dont une dimension est très supérieure aux deux autres). Si la pièce à étudier ne peut pas être modélisée par une poutre, on utilise le calcul par éléments finis qui ne peut-être que logiciel.

II Les hypothèses de la RDM Suite
2 Les matériaux étudiées:
Ils doivent être :
Isotropes : on admet que les matériaux ont, en un même point, les mêmes propriétés mécaniques dans toutes les directions.. Elle n'est pas vérifiée pour les matériaux tels que le bois, les matériaux composites...etc.
Homogènes : On admet que les matériaux ont les mêmes caractéristiques (composition) en tout point.
Continus : pas de fissure, pas de creux ...

3 Les charges appliquées:
Les charges sont contenues dans le plan de symétrie
Plan de symétrie
Elles sont concentrées ou réparties
Suite
II Les hypothèses de la RDM

II Les hypothèses de la RDM
4 Les déformations :
- Au cours de la déformation, les sections droites restent planes et perpendiculaires à la ligne moyenne).
- Les déformations restent faibles comparativement aux dimensions de la poutre
Suite

III Torseur de cohésion
1 Principe de calcul:
Suite

III Torseur de cohésion
{𝑇 h𝑐𝑜 }= { ��𝐺
¿ ��𝐺}
𝐺
❑
Suite

III Torseur de cohésion
Deux conventions d’écriture sont possibles.Conventions 1 : le torseur de cohésion modélise les actions
mécaniques de la partie (2) sur la partie (1) ;Conventions 2 : le torseur de cohésion modélise les actions
mécaniques de la partie (1) sur la partie (2).
Suite

III Torseur de cohésion
Pour la suite, nous adopterons la CONVENTION 1 tout à fait arbitrairement.
Suite

III Torseur de cohésion
Equilibre du tronçon (1).
Suite

III Torseur de cohésion
Définition 1 :Le torseur de cohésion au centre de surface G d’une surface droite de poutre se défini en effectuant la somme des torseurs, au même point G, des actions mécaniques agissant à gauche de la section droite, somme précédée du signe -.
Equilibre du tronçon (1).
Suite

III Torseur de cohésion
Equilibre du tronçon (2).
Suite
Rappel : principe des actions réciproques :
{𝑇 1 /2 }+ {𝑇 �� 2→ 2}+ {𝑇 �� 4 → 2 }= {0 }
− {𝑇2 /1 }+{𝑇 𝑒𝑥𝑡 /2 }={0 } − {𝑇 h𝑐𝑜 }=− {𝑇 𝑒𝑥𝑡 /2 }
{𝑇 h𝑐𝑜 }= {𝑇𝑒𝑥𝑡 /2 }

III Torseur de cohésion
Equilibre du tronçon (2).
Suite
Définition 2 :Le torseur de cohésion au centre de surface G d’une surface droite de poutre se défini en effectuant la somme des torseurs, au même point G, des actions mécaniques agissant à droite de la section droite, somme précédée du signe +.

III Torseur de cohésion Suite
2 Exemple de calcul:Soit une poutre reposant sur 2 appuis et soumise à une force de longueur l = 4,2 m
Détermination du torseur de cohésion :On décompose la poutre en deux zones : [AC] et [CB].Zone [AC] : a = 1,2m Nous allons déterminer le torseur de
cohésion au centre de surface G1 d’une section de poutre située entre A et C, repérée par l’abscisse x.Le torseur de cohésion au point G1 se détermine en effectuant la somme des A.M. agissant à gauche de la coupure, somme précédée du signe « - »

III Torseur de cohésion Suite
2 Exemple de calcul:
Zone [AC] : a = 1,2m

III Torseur de cohésion Suite
2 Exemple de calcul:Zone [CB] : b = 3 m
Pour la détermination de ce torseur de cohésion, il est préférable d’utiliser la définition 2

III Torseur de cohésion Suite
3 Composantes du torseur de cohésion
{𝑇 h𝑐𝑜 }= { ��𝐺
��𝐺}
𝐺
❑
(𝑥 ,𝑦 , 𝑧 )
❑
= |𝑁 𝑀𝑡𝑇𝑦 𝑀𝑓𝑦𝑇𝑧 𝑀𝑓𝑧|𝐺
❑
(𝑥 ,𝑦 ,𝑧 )
❑
N : effort normal Mt : moment (ou couple) de torsion
Ty : Effort tranchant suivant y
Mfy : moment fléchissant ou moment de flexion suivant y
Tz : Effort tranchant suivant z
Mfz : moment fléchissant ou moment de flexion suivant z

III Les différentes sollicitations simples
Suite
Une poutre peut être soumise à plusieurs sollicitations qui dépendent de la nature et de la direction des actions mécaniques.

III Les différentes sollicitations simples
Suite
xy
RG
NcohT
,00000
:)(
Traction
Exemples:
TirantBiellette
Courroie
N
N
NN
N>0

III Les différentes sollicitations simples
Suite
RG
NcohT
,00000
:)(
Compression
Exemples:
TirantBielletteRessort
xy
NN
N<0
N
N

III Les différentes sollicitations simples
Suite
Cisaillement
Exemples:
AxeClavetteGoupille
Rivet
xy
T
T
T
T/2
T/2
RG
TzTycohT
,0000
:)(

III Les différentes sollicitations simples
Suite
Torsion
Exemples:Arbre de
transmissionTuyauterie
RG
MtcohT
,0000
0:)(
x
y
MtMt
Mt
Mt

III Les différentes sollicitations simples
Suite
Flexion
Exemples:Arbre
AxePlongeoir
Aile d’avion
RG
MfzTycohT
,0
000
:)(
xy T
Td

IV TractionSuite
1 Essai de Traction:
L’essai de traction est une expérimentation qui a pour objet la détermination des caractéristiques de résistance du matériau testé.

IV TractionSuite
On applique progressivement et lentement à une éprouvette, de formes et de dimensions normalisées, un effort de traction croissant dont l’intensité varie de 0 à F jusqu’à la rupture..Le tableau ci-contre montre
l’évolution de la déformation de l’éprouvette en fonction de la charge appliquée

IV TractionSuite
2 Résultats de l’essai
Allongement en mm
F(N)
Zone de déformationélastique
Zone de déformation plastique
Point de ruptureF
Fe Charge limite élastique
e
rF
Fr : Charge limite à la rupture
Graphe de l’allongement en fonction de la charge appliquée

IV TractionSuite
Résistance élastique Re avec Re en MPa, Fe en N, So section de la pièce en
mm2
o
ee S
FR
avec Rr en MPa, Fr en N, So section de la pièce en mm2.
o
rr S
FR
Résistance à la rupture Rr

IV TractionSuite
Coefficient d’allongement A%
avec Lu longueur ultime après rupture, Lo longueur initiale.
100%
Lo
LoLuA
avec L allongement total de la poutre; Lo longueur d’origine; L allongement relatif suivant l’axe
oL
LL
Allongement relatif

IV TractionSuite
Coefficient de Poisson
Pour les matériaux élastiques, la diminution des sections droites est proportionnelle à l’allongement relatif, ce coefficient est noté et appelé coefficient de Poisson.
do
d
Lo
L
Ce coefficient caractérise la déformation transversale.
ddo
d Ld en notant on obtient

V ContrainteSuite
1 Définition du vecteur contrainte :
Une coupure est effectuée au niveau de la surface S (le plan de coupe peut ne pas être perpendiculaire à la ligne moyenne).Considérons un point M de cette surface et dS un élément de section droite aussi petit que possible entourant le point M.Soit l’effort élémentaire transmis par dS exercé par la matière de la partie droite sur la partie gauche de la poutre.On appelle vecteur contrainte au point M pour la coupure de normale le vecteur :
d
FdC EE
nM12
),(
Unités : en MPa ou N/mm2. La contrainte est homogène à une pression.

V ContrainteSuite
2 Contrainte normale et contrainte tangentielle :Soit le repère local affecté à la coupure suivant la section droite S de normale .Projetons le vecteur contrainte Cm dans le repère (G x y z) :
MMxMC ),(
: Contrainte normale (projection du vecteur contrainte sur la normale à la coupure).
M
: Contrainte tangentielle (projection du vecteur contrainte dans le plan YZ).
M

V ContrainteSuite
3 Contrainte en traction:
SF
E
M MLorsqu’une poutre est sollicitée en traction la contrainte tangentielle est nulle et la contrainte normale vaux :
L’expérience montre qu’il y a proportionnalité dans la zone élastique entre la contrainte et l’allongement relatif .Loi de Hooke :
avec s en N/mm²(MPa), F en N, S en mm².
avec E module de Young en N/mm². (aciers E = 210000Mpa)

V ContrainteSuite
4 Condition de résistancePendant toute la durée de son service, une pièce doit conserver un comportement élastique. Cette condition s'exprime par l'inégalité suivante :
Les problèmes d'incertitude sur la valeur de Re, de la contrainte, de la modélisation de l'étude…, nous amènent donc à exprimer la condition de résistance par :
ei Rmax
pee
i Rs
Rmax
avec Re: résistance limite élastique en MPas: coefficient de sécurité (s>1)Rpe: résistance pratique de limite élastique en Mpa

V ContrainteSuite
5 Coefficient de concentration de contraintes : KtLa plupart des pièces industrielles ne sont pas cylindriques, elles possèdent des singularités de formes (perçages, gorges, rainures, filetages…). On définit un coefficient de concentration de contrainte appelé Kt tel que :La contrainte maximale a pour valeur :
nomti K .max
Avec : = contrainte atteinte au voisinage de la singularité
= contrainte moyenne nominale calculée
imax
nom

V ContrainteSuite
5 Coefficient de concentration de contraintes : Kt

V ContrainteSuite
5 Coefficient de concentration de contraintes : Kt
Les valeurs de Kt sont expérimentales. Exemple 1 : Pour un filetage triangulaire ISO : Kt = 2.5
Exemple 2 : Arbre de section circulaire épaulé.

V CisaillementSuite
1 Relation sollicitation - Contrainte
S
T
x
y
T : effort tranchant en NS : surface de la section en m2
La contrainte tangentielle engendrée est identique dans toute la section
2 Loi de comportement élastique
.GG : module de Coulomb en Pa
: glissement transversal relatif (sans unité)

V TorsionSuite
1 Relation sollicitation - Contrainte
Mt : moment de torsion en NmIG : moment quadratique
polaire de la section en m4
: distance au centre de la section en m
2 Moment quadratique polaire
G
Fibre neutre
M
GI
Mt
O (S)
SM
y
x
z
Le moment quadratique polaire de la surface (S) par
rapport au point O est :Io =
( )S 2 . DS

V TorsionSuite
Quelques expressions usuelles
3 Loi de comportement élastique
GIGMt G : module de Coulomb en Pa
x
angle de torsion unitaire en rad/m
IG : moment quadratique polaire de la section en m4
x

V FlexionSuite
1 Relation sollicitation - ContrainteMfz : moment de flexion en NmIGz : moment quadratique de la
section par rapport à l’axe (Gz) en m4
y : distance par rapport à l’axe (Gz) en m
2 Moment quadratique par rapport à un axe
y
z
x
y M
G
yI
Mf
Gz
z
La contrainte normale engendrée est nulle le long de l’axe (Gz) (fibre neutre) et est de plus en plus élevée lorsqu’on s’en éloigne.
O(S)S
M
y
y
x

V FlexionFin
Quelques expressions usuelles
3 Loi de comportement élastique
''fIEMf Gzz
Mfz : moment de flexion en NmE : module de Young en PaIGz : moment quadratique par
rapport à l’axe z de la section en m4
f : flèche (écart verticale par rapport à la position sans sollicitation) en m
f’’ : dérivée seconde de la flèche par rapport à l’abscisse x
Top Related