Université de Picardie Jules Verne - ACSE...
61
Université de Picardie Jules Verne Laboratoire de Modélisation d’Information et Systèmes (MIS) (www.mis.u-picardie.fr ) Département Electronique Electrotechnique et Automatique (EEA) Resp. : Prof. A. El Hajjaji (www.u-picardie.fr/iupgeii )
Transcript of Université de Picardie Jules Verne - ACSE...

Université de Picardie Jules Verne
Laboratoire de Modélisation d’Information et Systèmes (MIS) (www.mis.u-picardie.fr )
Département Electronique Electrotechnique et Automatique (EEA) Resp. : Prof. A. El Hajjaji (www.u-picardie.fr/iupgeii)

Université de Picardie Jules Verne

Amiens au cœur de l’Europe
• La ville d’Amiens est au cœur de l'Europe :
– A mi-chemin entre Paris et Lille (moins d'une heure de train chacune).
– A deux heures de Bruxelles.
– A quatre heures d'Amsterdam.
– Et aussi, à cinq heures de Londres…

L’Université au cœur de la ville
• L’Université de Picardie est née le .
• En 1991, de Picardie devient l’ niversité de icardie ules erne ( ) :
– Rendant hommage au qui vécut de longues années à Amiens.
L’UPJV … UN FORT POTENTIEL SCIENTIFIQUE
L'excellence des équipes de recherche est reconnue au plan régional, national et international.
Leur montée en puissance se poursuit et les rapprochements entre la recherche publique et la recherche privée sont
favorisés.
La valorisation de la recherche est accrue en direction des collectivités territoriales et des entreprises est également
privilégiée.
L’UPJV a relevé un défi :
Accueillir et former plus de étudiants.
Développer des pleinement reconnues sur le marché
du travail.
L’UPJV…en trois mots :
: 18 composantes…
: implantée dans 6 villes...
: + de et …

UFR des Sciences
• L’Unité de Formation et de Recherches des Sciences :
– Propose des formations générales, professionnelles et de recherche dans le cadre du dispositif européen LMD.
– Est située au cœur du centre ville dans le quartier historique Saint-Leu.

UFR des Sciences
6 départements :
• Sciences de la vie et de la terre (V. Niot)
• Mathématiques (A. Rivière)
• Physique (M. Clin)
• Chimie (D. Postel)
• Electronique Electrotechnique et Automatique (A. El Hajjaji)
5

Effectifs :
- 22 Enseignants et Enseignant-chercheurs
- 2 ingénieur et 2 secrétaires
- ~150 Etudiants
Département
Electronique Electrotechnique et Automatique (EEA)
UFR des Sciences/ UPJV

Objectifs
Former des responsables et des cadres
opérationnels, de niveau ingénieur et dans
les secteurs utilisant des compétences et
un savoir faire en automatique et
robotique, en l'électronique embarquée,
en énergie et machines électriques, en
informatique industrielle et en génie
informatique.

Diplômes
• Master Sciences et Technologie de l’information
– Spécialité Electronique, Electrotechnique, Automatique et Informatique industrielle
– Spécialité Informatique et Instrumentation pour la biologie et la santé
• Licences Professionnelles
– Systèmes embarqués dans l’automobile
– Robotique et Vision industrielle
• Licence Physique
– Electronique, Electrotechnique et Automatique

• Collaborations avec les entreprises publiques et privées, les organisations professionnelles, les administrations et collectivités locales.
• Professionnalisation organisée autour de compétences scientifiques, techniques, méthodologiques et d'organisation.
• Pluridisciplinarité, clé du développement industriel, qui assure une grande polyvalence tout en facilitant l'intégration à l'issue de la formation.

• Formation par alternance et stages en entreprise pour renforcer davantage les compétences techniques, le savoir faire et le savoir être de nos étudiants.
• Pédagogie de projets pour faciliter les contacts entre les élèves, les ingénieurs et les enseignants.
• Organisation proche de ses étudiants pour les accompagner, les aider et les conseiller tout au long de leurs parcours.

Quelques Partenaires Industriels

Ouverture vers l’international
Dans le cadre du programme d’échange Socrates-Erasmus, les étudiants du Département EEA peuvent effectuer une partie de leur cursus dans une autre université européenne (Allemagne, Espagne, Italie, Roumanie, Danemark, Bulgarie, Belgique, Slovaquie, Pologne …)

Quelques Réalisations

Quelques réalisations

Plateforme Energie Renouvelable
Recherche à l’UPJV
32 Laboratoires de recherche attachés à 2 écoles doctorales :
• École Doctorale en Sciences Humaines et Sociales
• École Doctorale en Sciences et Santé
Missions des deux écoles doctorales de l'UPJV • Accueillir les doctorants et gérer leur scolarité
• Délivrer une formation spécifiquement destinée aux doctorants dans un cycle
cohérent d'études doctorales de haut niveau
• Apporter une aide à l'insertion professionnelle des doctorants
• Contribuer à l'animation de la recherche, à l'élaboration ou l'évolution des thèmes
directeurs de la recherche, et aux collaborations entre équipes de recherche
• Déterminer, en collaboration avec les équipes de recherche, la politique de
recrutement des nouveaux doctorants ainsi que les profils prioritaires pour les
demandes d'allocations de recherche.

Laboratoire MIS
Université de Picardie Jules Verne
Domaine STIC
Sciences et Technologies de l’Information et de la Communication
STAFF
• 10 professeurs des universités
• 25 maîtres de conférences
• 30 doctorants et 8 ATER et post-doctorants
• 2,8 ITA/IATOS (équivalent temps plein recherche)

MIS est structuré en cinq équipes
• Domaine de l’informatique :
Graphes, Optimisation et Contraintes (Chu-Min LI )
Connaissances (G. Kassel)
Systèmes Distribués, Mots et Applications (V. Villain)
• Domaines de l’automatique et de la vision :
Perception en Robotique (C. Pégard)
Commande et Véhicule (A. El Hajjaji)

Activités générales
Informatique : – Algorithmique, complexité – Parallélisme, systèmes répartis, réseaux – Théorie des Graphes, recherche opérationnelle – Logistique : optimisation des flux (mieux planifier les tâches, mieux
lisser l’activité, optimiser les ressources, …) – Gestion des connaissances, mémoires d’entreprise, Web Sémantique
Automatique et Robotique : – Diagnostic, Surveillance, Commande tolérante aux fautes – Aide et assistance à la conduite dans les véhicules (confort et sécurité). – Optimisation et gestion de l’énergie. – Vision omnidirectionnelle – Perception multi-sensorielle et omnidirectionnelle de robots – Localisation des robots

Equipe Commande et Véhicule (COVE)
Resp. : A. El Hajjaji

Composition de l’équipe COVE
Permanents (6) :
J. Bosche (MCF), M. Chadli (MCF-HDR, PES), A. El Hajjaji (PR,
PES), O. Pagès (MCF), D. Pascault (MCF), A. Rabhi (MCF).
Post-Docts : 2 , Doctorants : 5, Masters : 6
Axes méthodologiques
Commande robuste des systèmes non linéaires
Diagnostic et Commande Tolérante aux Fautes (FTC)
Axes appliqués
Dynamique des véhicules
Systèmes de conversion des énergies renouvelables
Axes de recherche

Axes méthodologiques

Classes des systèmes non linéaires
– Modèles flous standards et descripteurs
– Modèles LPV
– Modèles flous à retards
– Modèles hybrides flous
– Modèles affines en commande avec des dynamiques mal connues.
Commande Robuste
Commande robuste
• Robustesse – Variations paramétriques
– Perturbations extérieures
• Synthèse des lois de commande robuste – Par retour d’état statique
– Par retour de sortie statique
– Par retour d’état basé sur observateurs
– Combinant la logique floue et le mode glissant

Commande robuste
• Commande robuste avec spécifications de performances.
• Synthèse des lois de commande robuste avec contraintes

Diagnostic et FTC
Objectif
Diagnostic à base de modèle
Détection des défauts capteurs et actionneurs
Représentation des systèmes non linéaires par des modèles TS – Synthèse d’observateur TS à entrées inconnues
– Synthèse d’observateur TS en utilisant l’approche des systèmes descripteurs.
– Synthèse d’observateur adaptatif TS

Diagnostic et FTC
• Commande FTC passive et active
• FTC passive : défaut actionneurs, LPV et floue
• FTC active :
– Banc d’observateurs
– Compensateur de défauts :
• Estimation de défauts en utilisant une loi d’adaptation
• Estimation de défauts en utilisant l’approche descripteurs.

Axes appliqués

Dynamique de véhicule
Objectif : Sécurité active dans l’automobile
- Stabilité du véhicule
- Freinage d’urgence
- Prédiction des sorties de route
- Prédiction des renversements

Projets de recherche

31
Validation du modèle du véhicule
Entrées Comparaison Sorties
Sorties
Sorties

32
Développer un système d’aide à la conduite qui couple des informations issues de différents modes de perception (cartographie, caméras embarqués, ..) avec la dynamique de véhicule.
Estimation
de l’état du
vehicule
M
O
D
E
L
E
Mesures Module
d’évaluation
de risque
Alert
Transmission
Système Embarqué d’Évaluation de la Dynamique de
Véhicule et d’Aide à la Conduite
• Objectifs
Estimation de la dynamique du véhicule
Détection des sorties de route, des renversements
Indicateurs de risques

33
Contexte

34
Une disproportion entre le nombre
d’accidents et les pertes humaines et
matérielles.
• Sorties de route:
Accidents: 7.8% , Tués :25% [VT IEEE
magazine, mars 2009].
• Renversements:
Accidents: 3% , Tués: 30% [NCSA 2002].
Motivation

L’ESP pour le contrôle de
trajectoire
L’ABS pour l'assistance au
freinage
L’airbag pour protéger les
passagers lors de collisions ? Pas de système de protection
pour les renversements
Motivation
Systèmes de sécurité
dans les véhicules
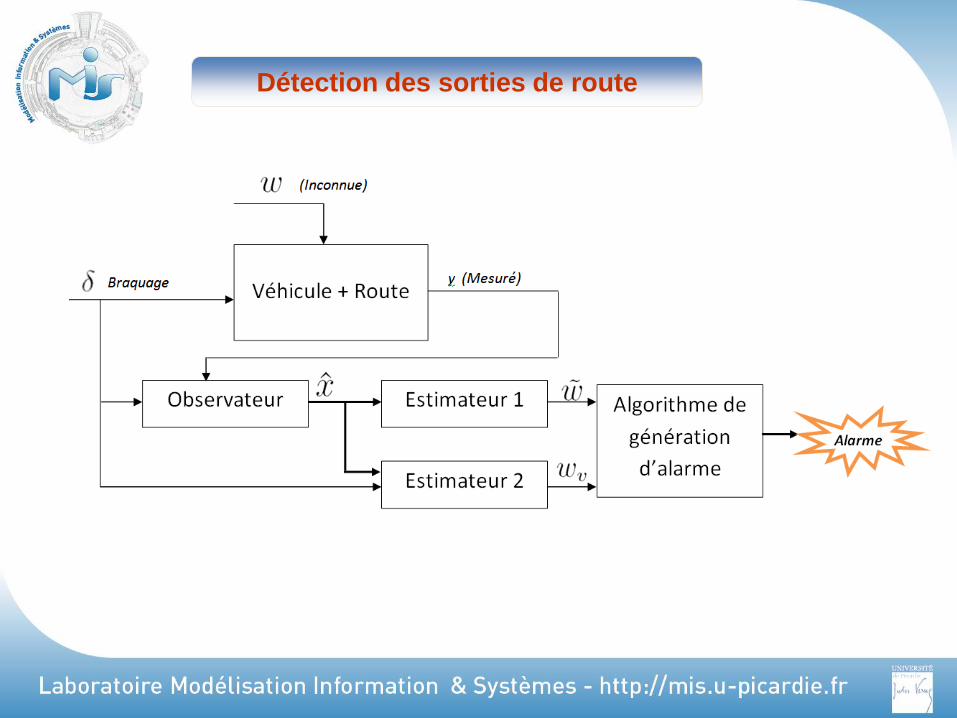
Détection des sorties de route

Détection des sorties de route
Comparer la trajectoire du véhicule à la trajectoire de la
route
Fixer la valeur du seuil à ne pas dépasser
Le conducteur doit agir pour corriger l’erreur
Calculer le temps de correction d’après les actions du conducteur
Les corrections seront-elles efficaces?

38
Validation sur le simulateur CarSim

39
Rollover statistics [NCSA 2002] :
Une disproportion entre le nombre
d’accidents et les pertes humaines et
matérielles.
Motivation
Détection des renversements
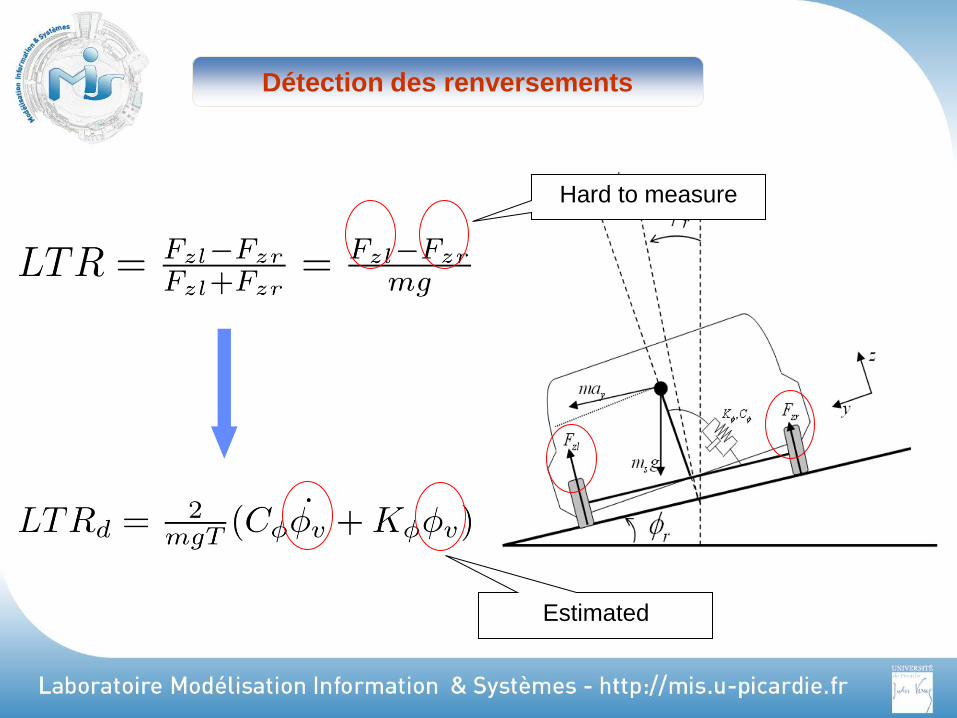
Hard to measure
Estimated
Détection des renversements

Structure globale

42
Equations du mouvement latéral et du roulis
Forces latérales (Pacejka model)
Introduction
Modélisation du véhicule
Le transfert de charge latérale
Synthèse de l’observateur
Résultats de simulation
Conclusions et perspectives
Modélisation du véhicule

43
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5-5000
-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
5000
Slip angle (rad)
Late
ral fo
rce (
N)
9
1.4
5000
0.25
f
f
f
f
B
C
D
E
(2)
Forces latérales (Pacejka model)
Modélisation du véhicule Introduction
Modélisation du véhicule
Le transfert de charge latérale
Synthèse de l’observateur
Résultats de simulation
Conclusions et perspectives

150 .fC kN rad
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5-5000
-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
5000
Slip angle (rad)
Late
ral fo
rce (
N)
Modèle linéaire: = C
= C
f fFyf
Fyr r r
Forces latérales (Pacejka model)
Modélisation du véhicule Introduction
Modélisation du véhicule
Le transfert de charge latérale
Synthèse de l’observateur
Résultats de simulation
Conclusions et perspectives
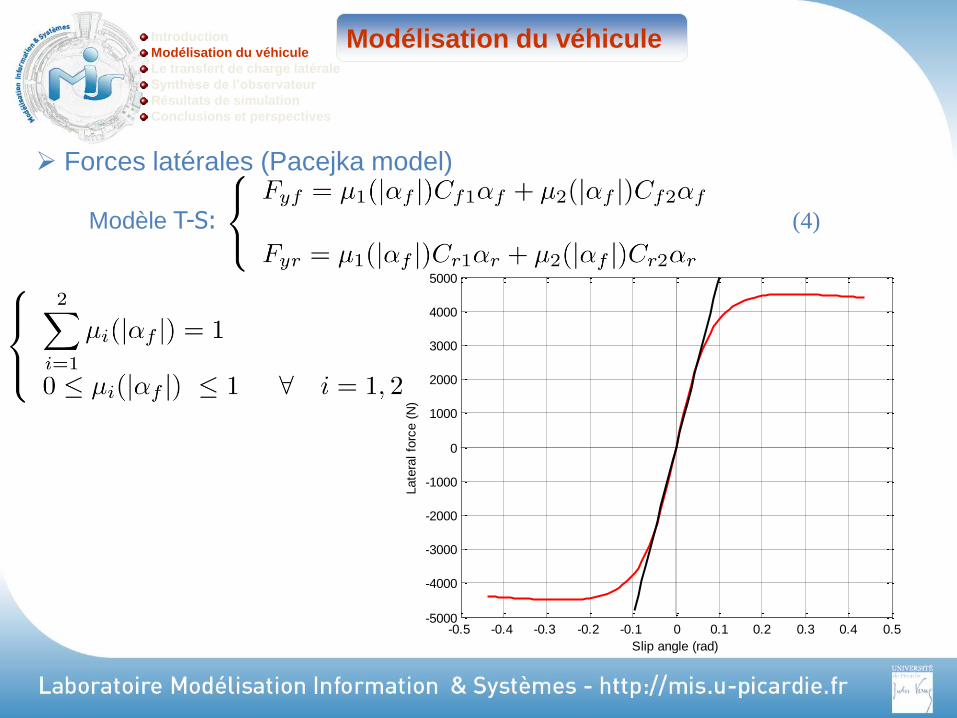
Modèle T-S: (4)
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5-5000
-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
5000
Slip angle (rad)
Late
ral fo
rce (
N)
Modélisation du véhicule
Forces latérales (Pacejka model)
Introduction
Modélisation du véhicule
Le transfert de charge latérale
Synthèse de l’observateur
Résultats de simulation
Conclusions et perspectives

1 1
1 2
C C
C C
67371, 580
75026, 455
f f
r r
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5-5000
-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
5000
Slip angle (rad)
Late
ral fo
rce (
N)
Fuzzy model
Non linear model
Linear model
(4)
Modélisation du véhicule
Forces latérales (Pacejka model)
Introduction
Modélisation du véhicule
Le transfert de charge latérale
Synthèse de l’observateur
Résultats de simulation
Conclusions et perspectives
Modèle T-S:

Modélisation du véhicule

Observateur T-S
Synthèse de l’observateur
Avec:
Système augmenté

Angle de braquage
Devers de route
Résultats de simulation

Estimation des états du véhicule
Résultats de simulation

Transfert de charge latérale Le risque de renversement est
sous-estimé quand le devers
est négligé
Résultats de simulation

Objectifs
- Commande robuste des convertisseurs DC-DC (Boost et Buck)
- Caractérisation et modélisation des panneaux photovoltaïques
- Contrôle robuste des systèmes de conversion d’énergie éolienne
- Gestion «optimale» des stations multi-sources
Energies renouvelables

Commande d’un Convertisseur Boost DC/DC
Développer une commande robuste permettant de poursuivre le point de puissance maximale.
54
Objectif :

Résultats
Robustesse Vbat
Comparaison entre les MPPT flou et P&O
Robustesse Ipv
Robustesse Vref

Contrôle multi-sources
Study Zone
DC/DC Converter
Inverter
=
_
_
=
=
=
Wind Turbine
Energy Storage Systems (B+U)
PV Panel
DC
bus
=
_
Rectifier
φi: duty cycle
φ1 φ2
φ4
Reversible DC/DC Converter
Vbus
=
~
φ3
DC/DC Converter
Rectifier
Variable Load
DC/DC Converter
Combustion Engine

Gestion, Optimisation Et Conversion des énergies pour Habitat autonOME (GEO-ECOHOME)
Partenaires:
Laboratoire Modélisation, Information & Systèmes - MIS/UPJV(J. BOSCHE, M. DAHMANE, A. EL HAJJAJI, X. PIERRE, A. RABHI)
Laboratoire de Réactivité et Chimie des Solides - LRCS/UPJV (M. MORCRETTE, C. SURCIN)
Laboratoire d’Electromécanique de Compiègne - LEC/UTC (G. FRIEDRICH, C. FORGEZ, K. EL KADRI BENKARA)
Equipe de recherche AVENUES-GSU / UTC, (F. LOCMENT, M. SECHILARIU)
Période du projet : 01/10/2011 au 30/09/2014
Problématique de projet:
La forte dépendance énergétique de la société actuelle confrontée
à l’épuisement progressif des ressources énergétiques fossiles
ainsi qu’aux émissions de gaz à effet de serre fait des énergies
renouvelables une solution incontournable. Oui mais, comment
exploiter ces énergies de façon optimale?
GERER
DIAGNOSTIQUER
DIMENSIONNER
OPTIMISER
SUPERVISER
Superviser le site de
production d’énergie
renouvelable, localement
ou à distance via internet
ou une connexion GSM.
Gérer de façon optimale la production
et l’exploitation de l’énergie à partir
des sources disponibles en fonction
de la demande et de l’état de charge
des batteries.
Dimensionner
correctement les
batteries et gérer
l’énergie stockées à
l’intérieur.
Diagnostiquer et évaluer la valeur de
certains paramètres propres au
dispositif de stockage de l’énergie afin
d’optimiser et de garantir le
fonctionnement du dispositif en toute
sécurité
Optimiser l’apport en énergie
électrique, en commandant les
différents convertisseurs de
manière judicieuse .
Résultats attendus:
Développement d’une plate-forme complète (éolienne, panneaux solaires, pompe hydraulique, batteries…) intégrant les
outils scientifiques développés.
Objectifs du projet :
Le projet GEO-ECOHOME propose l’étude et la réalisation d’un
système hybride multi source (énergies solaire, éolienne et
hydraulique). Il vise à étudier, à concevoir et à développer un
système de commande, de gestion et de surveillance, qui optimise
le transfert des énergies propres une fois converties. Grâce à ce
dispositif, une totale autonomie en électricité d’un site isolé peut
alors être garantie quelque soient les conditions météorologiques.
GEO-ECOHOME en quelques chiffres
Responsable de projet: Jérôme BOSCHE ([email protected]) Doctorant: Menad DAHMANE

Plateforme EnR

Résultats expérimentaux
59
0
500
1000
15/05/2012 16/05/2012 17/05/2012 18/05/2012 19/05/2012 20/05/2012 21/05/2012 22/05/2012
Irradiation (W/m²)
0
10
20
30
40
50
15/05/2012 16/05/2012 17/05/2012 18/05/2012 19/05/2012 20/05/2012 21/05/2012 22/05/2012
Température des panneaux (°C)
0,00
100,00
200,00
300,00
400,00
500,00
15/05/2012 16/05/2012 17/05/2012 18/05/2012 19/05/2012 20/05/2012 21/05/2012 22/05/2012
Puissance fournie par les panneaux (W)

Professeur A. El Hajjaji
Adresse recherche
Responsable de l’équipe Commande et Véhicule
Laboratoire Modélisation Information et Systèmes
Tél. : +33 3 22 82 76 84 email :[email protected]
Web lab : www.mis.u-picardie.fr
Adresse Enseignement
Directeur du Département EEA
UFR des Sciences, 33 Rue St Leu, 80000 Amiens
Tél. +33 3 22 82 78 35 email : [email protected]
Web : www.u-picardie.fr/iupgeii
Page personnelle : www.mis.u-picardie.fr/~hajjaji
60