Promeo - Université de Picardie Jules Verne 2020-2021 LPro ...
11
Promeo - Université de Picardie Jules Verne 2020-2021 LPro Automatisme et Robotique Initiation à la Robotique F. Morbidi et J. Ducrocq Page 1/2 Devoir Surveillé : noms AA-DU 27 novembre 2020 Consignes pour le contrôle: • Durée: 2h15 à partir de 8h30. Le barème est donné à titre indicatif. • Cours non autorisé. • Envoyez votre copie (nom du fichier: votre_nom_de_famille.pdf) avant 10h45 à l'adresse email: [email protected] Exercice 1 : [3 pts] Définir les caractéristiques suivantes d'un robot industriel: 1. Charge maximale transportable, 2. Répétabilité, 3. Volume de travail. Exercice 2 : [2 pts] Soit le manipulateur Stanford tel que montré dans la Figure 1. 1. Déterminer le nombre de DDL et le vecteur q des variables articulaires du robot. 2. Avec quel type de porteur et de poignet est équipé ce manipulateur ? Figure 1: Manipulateur Stanford. Exercice 3 : [5 pts] Pour les quatre robots industriels, a) TX200 de Stäubli, b) IRB 1520ID de ABB, c) IRB 910SC-3/0.65 de ABB et d) M-20iB/25 de FANUC (voir les fiches techniques en annexe), déterminer: • Le nombre de DDL, • Le type des articulations, • La charge maximale transportable, • La répétabilité (sur la position),
Transcript of Promeo - Université de Picardie Jules Verne 2020-2021 LPro ...

Promeo - Université de Picardie Jules Verne 2020-2021 LPro Automatisme et Robotique Initiation à la Robotique
F. Morbidi et J. Ducrocq Page 1/2
Devoir Surveillé : noms AA-DU 27 novembre 2020
Consignes pour le contrôle: • Durée: 2h15 à partir de 8h30. Le barème est donné à titre indicatif. • Cours non autorisé. • Envoyez votre copie (nom du fichier: votre_nom_de_famille.pdf) avant 10h45
à l'adresse email: [email protected]
Exercice 1 : [3 pts]
Définir les caractéristiques suivantes d'un robot industriel:
1. Charge maximale transportable, 2. Répétabilité, 3. Volume de travail.
Exercice 2 : [2 pts]
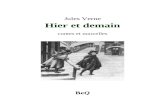
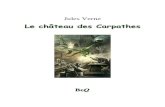
Soit le manipulateur Stanford tel que montré dans la Figure 1.
1. Déterminer le nombre de DDL et le vecteur q des variables articulaires du robot. 2. Avec quel type de porteur et de poignet est équipé ce manipulateur ?
Figure 1: Manipulateur Stanford.
Exercice 3 : [5 pts]
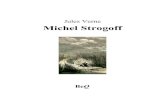
Pour les quatre robots industriels, a) TX200 de Stäubli, b) IRB 1520ID de ABB, c) IRB 910SC-3/0.65 de ABB et d) M-20iB/25 de FANUC (voir les fiches techniques en annexe), déterminer:
• Le nombre de DDL, • Le type des articulations, • La charge maximale transportable, • La répétabilité (sur la position),

Promeo - Université de Picardie Jules Verne 2020-2021 LPro Automatisme et Robotique Initiation à la Robotique
F. Morbidi et J. Ducrocq Page 2/2
• La masse du robot, • Le rayon d'action, • Les bornes des axes 2 et 3, • La vitesse maximale des trois premiers axes, • L'utilisation type.
En sachant que les produits à manipuler sont des para-brises en verre feuilleté de 6 kg, quel est le robot le plus adapté à une tâche de palettisation ?
Exercice 4 : [3 pts] 1. Décrire les fonctionnalités principales qu'on trouve dans le boîtier d'apprentissage
d'un robot Stäubli à 6 axes. Illustrer, en particulier, les modes manuels "joint", "frame" et "tool".
2. Expliquer les fonctions de mouvement suivantes pour un robot Stäubli à 6 axes: • movel(point location, tOutil, mDesc), • movec(pIntermédiaire, pCible, tOutil, mDesc).
3. Qu'est-ce que le language VAL3 ? Quelles sont les fonctionnalités de la Stäubli Robotics Suite ?
Exercice 5 : [3 pts] 1. Quels sont les éléments constitutifs du système d'actionnement de l'articulation d'un
robot industriel ? 2. Définir les notions d'exactitude et de precision d'un capteur. 3. Pour chacun des capteurs suivants, indiquer s'il s'agit d'un capteur proprioceptif ou
extéroceptif et actif ou passif: a) encodeur rotatif optique, b) capteur temps-de-vol, c) caméra industrielle, d) télémètre laser, e) capteur d'effort, f ) accéléromètre.
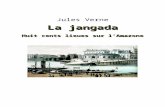
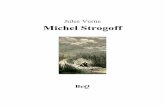
Exercice 6 : [4 pts] Soit le robot planaire à 3 DDL (RRR) montré dans la Figure 2.
1. Fixer les repères et écrire le tableau des paramètres de Denavit-Hartenberg du robot. 2. Les coordonnées du point P dans le repère {x3, y3, z3} sont p3 = [2, 2, 0]T (mètres).
Déterminer les coordonnées du même point dans le repère {x0, y0, z0} de la base. 3. Est-ce que le repère {x3, y3, z3} coïncide avec le repère de la pince ?
Figure 2 : Robot planaire à 3 DDL.

TX200 series industrial robots
Food
Automotive and equipment manufacturers
Life Sciences and pharma
Plastics
Cleanroom
Machine tending
Photovoltaics
TSScara / 4 axis
TXLow payload / 6 axis
RX / TXMedium payload / 6 axis
RX / TXHeavy paylod / 6 axis
TP Picker / 4 axis

MODEL TX200 TX200L
Characteristics
Maximum load (1) 130 kg 80 kg
Nominal load 100 kg 60 kg
Reach (between axis 1 and 6) 2194 mm 2594 mm
Number of degrees of freedom 6 6
Repeatability - ISO 9283 ± 0,06 mm ± 0,1 mm
Axis 1 (A) ± 180° ± 180°
Axis 2 (B) ± 120° ± 120°
Axis 3 (C) +145°/-140° +145°/-140°
Axis 4 (D) ± 270° ± 270°
Axis 5 (E) ±120° ±120°
Axis 6 (F) ± 270° (2) ± 270° (2)
Maximum reach between axis 1 and 5 (R. M) 2000 mm 2400 mm
Maximum reach between axis 2 and 5 (R. M) 1750 mm 2150 mm
Minimum reach between axis 1 and 5 (R. m1) 365 mm 528 mm
Minimum reach between axis 2 and 5 (R. m2) 545 mm 690 mm
Minimum reach between axis 3 and 5 (R. b) 800 mm 1200 mm
Axis 1 160°/s 160°/s
Axis 2 160°/s 160°/s
Axis 3 160°/s 160°/s
Axis 4 260°/s 260°/s
Axis 5 260°/s 260°/s
Axis 6 400°/s 400°/s
Maximum speed at load gravity center 12 m/s 14 m/s
Axis 5 45 kg.m2 40 kg.m2
Axis 6 20 kg.m2 15 kg.m2
Weight 1000 kg 1020 kg
Brakes All axis
Pneumatic2 solenoid valves in option 5/2-way monostable
(compressed air) 3 direct line between the base and the forearm
Electrical
Standard1 female 19-contact socket (7 twisted pairs
including 2 shielded, 3 power contacts)
Option Ethernet A 19-contact female cylindrical connector with 5 twisted pairs and 3 power contacts.+ 1 4-contact female cylindrical connector
M12 code D for a Cat 5e Ethernet link.
Cleanroom standard - ISO 14644-1 5
Protection class (*wrist) IP65 (*67)
Stäubli CS8 series controller CS8C HP
Installation environment
Working temperature according to standard directive NF EN 60 204-1 + 5°C to + 40°C
Humidity according to standard directive NF EN 60 204-1 30% à 95% max. non-condensing
Attachment methods Floor/Shelf/Ceiling (6)
Vertical cable outlet version (3) • •
Pressurized version (4) • •
Version HE (Humid Environnement) (5) • (6) • (6)
Market specific versions
CR Cleanroom - class 4 cleanliness - ISO 14644-1 • (6) • (6)
(1) Under special conditions, consult us.
(2) Software configurable up to ±18000°.
(3) Vertical outlet version: designed to offer additional connection protection at robot base or for use in clean and/or humid environment. Factory installation only.
(4) Pressurization kit: necessary for use in an environment with high dust levels or with substantial liquid splashing. This kit generates positive pressure in the arm. Factory installation only and required with pressurization kit.
(5) Version HE (Humid Environment): designed for use in humid and oxidizing environments. The arm components are painted individually, providing additional arm protection against oxidation and corrosion. Factory installation only and required with pressurization kit.
(6) Contact our sales team.
Motion range
CS8C HP controller
Fore
arm
co
nnec
tio
nsM
axim
um
iner
tias
Max
imum
sp
eed
Wo
rk
enve
lop
eM
oti
on
rang
e
Work envelope Mounting (not for vertical cable outlet option)
TX200 dimensions TX200L dimensions Wrist

IRB 1520IDThe Lean Arc Welder
Robotics
Dedicated arc welding robotWith IRB 1520ID (Integrated Dressing), the hose package is totally integrated into the upper arm and through the base of the robot. This means, all media necessary for arc welding, including power, welding wire, shielding gas and pressurized air is routed for maximized performance and energy efficiency.The IRB 1520ID delivers stable welding, excellent path ac-curacy, short cycle times and extended life expectancy of the hose package. Thanks to the integrated dressing, welding around cylindrical objects can be carried out without any stops and narrow spaces are more easily accessed.
Flexible installationWith a payload capacity of 4 kilograms and a reach of 1.5 meters, the highly compact IRB 1520ID can be mounted in both floor and inverted position. This positioning flexibility offers short cycle times and a wide range of production pos-sibilities.
Superior accuracy and speedABB robots are renowned for their superior motion control. With the second generation TrueMove™ technology, IRB 1520ID has an outstanding path accuracy. With the second generation QuickMove™ technology, the robot is able to uti-lize maximum acceleration between welds to increase output with minimum energy consumption.
Easy to use, Easy to programBoth robot and arc welding process are easily programmed and maintained with the ABB FlexPendant. It has a intuitive graphical interface which lets the operators control the robot and selected process equipment in their own language. It is equipped with a touchscreen and the unique ABB joy-stick for quick and easy positioning of the robot. If you appreciate the benefits of simulating and programming offline, ABB offers the most popular, reliable and cost-efficient software packages with RobotStudio™ and RobotStudio Arc Welding Power-Pac including VirtualArc™. With VirtualArc™ you get built-in welding expertise and the opportunity for virtual trial and error to achieve a perfect welding parameter setup and much less trimming. The welding robot will produce predictible cycle times and welding quality after only a few hours.
Global service and supportFor worry-free operation, ABB also offers RemoteService, which gives remote access to equipment for monitoring and support. Moreover, ABB customers can take advantage of the company’s service organization; with more than 35 years of experience in the arc welding sector, ABB provides service support in over 100 locations in 53 countries.
This high precision robotic arc welder, with integrated process dressing, combines 24/7 production output with 50% lower cost of maintenance to deliver the lowest cost per weld in its class.

© C
opyr
ight
AB
B.
RO
B02
14E
N_G
Mar
ch 2
014.
www.abb.com/robotics
IRB 1520ID
Main applications
Arc welding
Specification
Payload 4 kg
Armload 10 kg
Reach 1.50 m
Number of axes 6
Protection IP40
Mounting Floor, Inverted
IRC5 controller variants Drive module, Single cabinet
Physical
Dimensions robot base 300 x 300 mm
Robot weight 170 kg
Performance (according to ISO 9283)
Position repeatability (RP) 0.05 mm
Path repeatability (RT) 0.35 mm
Movement
Axis movements Working range Maximum speed
Axis 1 +170° to -170° 130°/s
Axis 2 +150° to -90° 140°/s
Axis 3 +80° to -100° 140°/s
Axis 4 +155° to -155° 320°/s
Axis 5 +135° to -135° 380°/s
Axis 6* +200° to -200° 460°/s
*+288 rev. to -288 rev max.
Electrical connections
Supply voltage 380 V
Power consumption ISO cube 0.6 kW
Environment
Ambient temperature for mechanical unit:
During operation +5°C (41°F) to +45°C (113°F)
During transportation and storage -25°C (13°F) to +55°C (131°F)
For short periods (max 24h) up to +70°C (158°F)
Relative humidity Max. 95% at constant temperature
Safety Double circuits with supervision,
emergency stops and safety func-
tions, 3-position enabling device
Emission EMC/EMI shielded
Data and dimensions may be changed without notice
Working range
IRB 1520ID-4/1.5
2601
1500
295
808
Z
160
X

IRB 910SC SCARA
Robotics
The IRB 910SC (SCARA) is fast, cost-effective and, because it‘s from ABB, accurate.
In designing its Selective Compliance Articulated Robot Arm (SCARA), or IRB 910SC, ABB has delivered a single arm robot capable of operating in a confined footprint. ABB’s SCARA is ideal for the Small Parts Assembly, Material Handling and parts inspection.
Variants With a maximum payload of 6 kg, the IRB 910SC is available in three configurations (IRB 910SC –3/0.45, IRB 910SC – 3/0.55m, and IRB 910SC – 3/0.65.) All are modular by design, with different linking arm lengths and have individual reaches of 450 mm, 550 mm and 650 mm, respectively.
Tabletop mountable, each member of our SCARA family is IP54-rated for optimum protection against dust and liquids. A Clean Room ISO-5 option is under development.
ApplicationsABB’s SCARA family is designed for a variety of general-purpose applications such as tray kitting, component placement, machine loading/unloading and assembly. These applications require fast, repeatable and articulate point-to-point movements such as palletizing, depalletizing, machine loading/unloading and assembly.
ABB’s SCARA family is ideal for customers requiring rapid cycle times, high precision and high reliability for their Small Part Assembly applications and for laboratory automation and prescription drug dispensing.
Features − A Clean Room ISO-5 option is under development − IP54 protection − Table top mountable − Ease of integration − Custom interfaces − Modular design
Customer benefits − Short cycle times which achieved by high speed − High precision which is achieved by superior motion control − Superb reliability due to reuse and standard proven
components

2 IRB 910SC | ABB data sheet
Specification
Robot version Reach Payload Armload
IRB 910SC-3/0.45 450 mm Rated: 3 kg; Max: 6 kg Included in
the max payload
IRB 910SC-3/0.55 550 mm Rated: 3 kg; Max: 6 kg Included in the max
payload
IRB 910SC-3/0.65 650 mm Rated: 3 kg; Max: 6 kg Included in
the max payload
Features
Integrated signal supply 10 signals on wrist
Integrated air supply 4 air on wrist (5 bar)
Robot mounting Table
Degree of protection IP30
Controller IRC5 Compact
Arm length 450mm; 550mm; 650mm
Shaft Diameter ø (mm) 20mm
Movement
IRB 910SC-3/0.45 IRB 910SC-3/0.55 IRB 910SC-3/0.65
Axis movement Working range Max speed Working range Max speed Working range Max speed
Axis 1 Rotation ±140 deg 415 deg/s ±140 deg 415 deg/s ±140 deg 415 deg/s
Axis 2 Rotation ±150 deg 659 deg/s ±150 deg 659 deg/s ±150 deg 659 deg/s
Axis 3 Up/Down 180mm 1.02 m/s 180 mm 1.02 m/s 180 mm 1.02 m/s
Axis 4 Rotation ±400 deg 2400 deg/s ±400 deg 2400 deg/s ±400 deg 2400 deg/s
Electrical connections
IRB 910SC IRB 910SC IRB 910SC
-3/0.45 -3/0.55 -3/0.65
Supply voltage 200-600 V, 200-600 V, 200-600 V,
50/60Hz 50/60Hz 50/60Hz
Transformer rating 3.0 kVA 3.0 kVA 3.0 kVA
Power consumption 220 W 220 W 220 W
Physical
IRB 910SC IRB 910SC IRB 910SC
-3/0.45 -3/0.55 -3/0.65
Footprint 160mmx160mm 160mmx160mm 160mmx160mm
Weight 24.5 kg 25 kg 25.5 kg
Performance
IRB 910SC IRB 910SC IRB 910SC
-3/0.45 -3/0.55 -3/0.65
1 kg picking cycle 0.380 s 0.370 s 0.385 s
Max TCP Velocity 6.2 m/s 6.9 m/s 7.6 m/s
Max TCP Acceleration 65 m/s^2 60 m/s^2 55 m/s^2
Acceleration time 0.04 s 0.05 s 0.06 s
0-1m/s
Axis 3 (Z stroke) 250 N 250 N 250 N
down force
Maximum Speed
Axis 1+ Axis 2 6.13 m/s 6.86 m/s 7.58 m/s
Axis 3 1.02 m/s 1.02 m/s 1.02 m/s
Axis 4 2400 deg/s 2400 deg/s 2400 deg/s
Position Repeatability
Axis 1 + Axis 2 ±0.015 mm ±0.015 mm ±0.015 mm
Axis 3 ±0.01 mm ±0.01 mm ±0.01 mm
Axis 4 ±0.005 deg ±0.005 deg ±0.005 deg

ABB data sheet | IRB 910SC 3
0,00
0,10
0,20
0,30
0,00 0,10 0,20
Z [m
]
L [m]
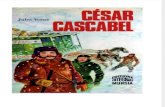
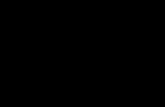
Load Diagram IRB 910SC - 3 / 0.65
6,0 kg (Za= 0,046 , Zb= 0,034 , Lb= 0,056 , Lc= 0,061 )
5,0 kg (Za= 0,052 , Zb= 0,039 , Lb= 0,061 , Lc= 0,067 )
4,0 kg (Za= 0,065 , Zb= 0,048 , Lb= 0,070 , Lc= 0,075
3,0 kg (Za= 0,074 , Zb= 0,056 , Lb= 0,076 , Lc= 0,087 )
2,0 kg (Za= 0,111 , Zb= 0,083 , Lb= 0,106 , Lc= 0,106 )
1,0 kg (Za= 0,199 , Zb= 0,149 , Lb= 0,150 , Lc= 0,150 )
0,00
0,10
0,20
0,30
0,00 0,10 0,20
Z [m
]
L [m]
Load Diagram IRB 910SC - 3 / 0.45
6,0 kg (Za= 0,049 , Zb= 0,037 , Lb= 0,053 , Lc= 0,061 )
5,0 kg (Za= 0,056 , Zb= 0,042 , Lb= 0,057 , Lc= 0,067 )
4,0 kg (Za= 0,068 , Zb= 0,051 , Lb= 0,066 , Lc= 0,075
3,0 kg (Za= 0,078 , Zb= 0,059 , Lb= 0,072 , Lc= 0,087 )
2,0 kg (Za= 0,116 , Zb= 0,087 , Lb= 0,106 , Lc= 0,106 )
1,0 kg (Za= 0,207 , Zb= 0,155 , Lb= 0,150 , Lc= 0,150 )
0,00
0,10
0,20
0,30
0,00 0,10 0,20
Z [m
]
L [m]Load Diagram IRB 910SC - 3 / 0.55
6,0 kg (Za= 0,049 , Zb= 0,037 , Lb= 0,053 , Lc= 0,061 )
5,0 kg (Za= 0,056 , Zb= 0,042 , Lb= 0,057 , Lc= 0,067 )
4,0 kg (Za= 0,068 , Zb= 0,051 , Lb= 0,066 , Lc= 0,075
3,0 kg (Za= 0,078 , Zb= 0,059 , Lb= 0,072 , Lc= 0,087 )
2,0 kg (Za= 0,116 , Zb= 0,087 , Lb= 0,106 , Lc= 0,106 )
1,0 kg (Za= 0,207 , Zb= 0,155 , Lb= 0,150 , Lc= 0,150 )
0,00
0,10
0,20
0,30
0,00 0,10 0,20
Z [m
]
L [m]
Load Diagram IRB 910SC - 3 / 0.65
6,0 kg (Za= 0,046 , Zb= 0,034 , Lb= 0,056 , Lc= 0,061 )
5,0 kg (Za= 0,052 , Zb= 0,039 , Lb= 0,061 , Lc= 0,067 )
4,0 kg (Za= 0,065 , Zb= 0,048 , Lb= 0,070 , Lc= 0,075
3,0 kg (Za= 0,074 , Zb= 0,056 , Lb= 0,076 , Lc= 0,087 )
2,0 kg (Za= 0,111 , Zb= 0,083 , Lb= 0,106 , Lc= 0,106 )
1,0 kg (Za= 0,199 , Zb= 0,149 , Lb= 0,150 , Lc= 0,150 )
0,00
0,10
0,20
0,30
0,00 0,10 0,20
Z [m
]
L [m]
Load Diagram IRB 910SC - 3 / 0.45
6,0 kg (Za= 0,049 , Zb= 0,037 , Lb= 0,053 , Lc= 0,061 )
5,0 kg (Za= 0,056 , Zb= 0,042 , Lb= 0,057 , Lc= 0,067 )
4,0 kg (Za= 0,068 , Zb= 0,051 , Lb= 0,066 , Lc= 0,075
3,0 kg (Za= 0,078 , Zb= 0,059 , Lb= 0,072 , Lc= 0,087 )
2,0 kg (Za= 0,116 , Zb= 0,087 , Lb= 0,106 , Lc= 0,106 )
1,0 kg (Za= 0,207 , Zb= 0,155 , Lb= 0,150 , Lc= 0,150 )
0,00
0,10
0,20
0,30
0,00 0,10 0,20
Z [m
]
L [m]Load Diagram IRB 910SC - 3 / 0.55
6,0 kg (Za= 0,049 , Zb= 0,037 , Lb= 0,053 , Lc= 0,061 )
5,0 kg (Za= 0,056 , Zb= 0,042 , Lb= 0,057 , Lc= 0,067 )
4,0 kg (Za= 0,068 , Zb= 0,051 , Lb= 0,066 , Lc= 0,075
3,0 kg (Za= 0,078 , Zb= 0,059 , Lb= 0,072 , Lc= 0,087 )
2,0 kg (Za= 0,116 , Zb= 0,087 , Lb= 0,106 , Lc= 0,106 )
1,0 kg (Za= 0,207 , Zb= 0,155 , Lb= 0,150 , Lc= 0,150 )
0,00
0,10
0,20
0,30
0,00 0,10 0,20
Z [m
]
L [m]
Load Diagram IRB 910SC - 3 / 0.65
6,0 kg (Za= 0,046 , Zb= 0,034 , Lb= 0,056 , Lc= 0,061 )
5,0 kg (Za= 0,052 , Zb= 0,039 , Lb= 0,061 , Lc= 0,067 )
4,0 kg (Za= 0,065 , Zb= 0,048 , Lb= 0,070 , Lc= 0,075
3,0 kg (Za= 0,074 , Zb= 0,056 , Lb= 0,076 , Lc= 0,087 )
2,0 kg (Za= 0,111 , Zb= 0,083 , Lb= 0,106 , Lc= 0,106 )
1,0 kg (Za= 0,199 , Zb= 0,149 , Lb= 0,150 , Lc= 0,150 )
0,00
0,10
0,20
0,30
0,00 0,10 0,20
Z [m
]
L [m]
Load Diagram IRB 910SC - 3 / 0.45
6,0 kg (Za= 0,049 , Zb= 0,037 , Lb= 0,053 , Lc= 0,061 )
5,0 kg (Za= 0,056 , Zb= 0,042 , Lb= 0,057 , Lc= 0,067 )
4,0 kg (Za= 0,068 , Zb= 0,051 , Lb= 0,066 , Lc= 0,075
3,0 kg (Za= 0,078 , Zb= 0,059 , Lb= 0,072 , Lc= 0,087 )
2,0 kg (Za= 0,116 , Zb= 0,087 , Lb= 0,106 , Lc= 0,106 )
1,0 kg (Za= 0,207 , Zb= 0,155 , Lb= 0,150 , Lc= 0,150 )
0,00
0,10
0,20
0,30
0,00 0,10 0,20
Z [m
]
L [m]Load Diagram IRB 910SC - 3 / 0.55
6,0 kg (Za= 0,049 , Zb= 0,037 , Lb= 0,053 , Lc= 0,061 )
5,0 kg (Za= 0,056 , Zb= 0,042 , Lb= 0,057 , Lc= 0,067 )
4,0 kg (Za= 0,068 , Zb= 0,051 , Lb= 0,066 , Lc= 0,075
3,0 kg (Za= 0,078 , Zb= 0,059 , Lb= 0,072 , Lc= 0,087 )
2,0 kg (Za= 0,116 , Zb= 0,087 , Lb= 0,106 , Lc= 0,106 )
1,0 kg (Za= 0,207 , Zb= 0,155 , Lb= 0,150 , Lc= 0,150 )
160
136
.5
c
b
a
e
m
p
n
IRB 910SC-3/0.65
q
j
k
160
136
.5
a
b b
cc
dd
jk
a
f
h
g
p
m
n
IRB 910SC-3/0.55
q
136
.5
160
a a
b b
c c
d
d
j
k
ef
hg
p
m
nq
IRB 910SC-3/0.45
IRB 910SC-3/0.45 IRB 910SC-3/0.55 IRB 910SC-3/0.65140 140 1401.5 1.5 1.5150 150 150
150119 145
300 400450 550 650150 150 150
5 5 5
1 3 4 5 6
C
1 3 4 5 6
C
B B
1
1
160
136
.5
c
b
a
e
m
p
n
IRB 910SC-3/0.65
q
j
k
160
136
.5
a
b b
cc
dd
jk
a
f
h
g
p
m
n
IRB 910SC-3/0.55
q
136
.5
160
a a
b b
c c
d
d
j
k
ef
hg
p
m
nq
IRB 910SC-3/0.45
IRB 910SC-3/0.45 IRB 910SC-3/0.55 IRB 910SC-3/0.65140 140 1401.5 1.5 1.5150 150 150
150119 145
300 400450 550 650150 150 150
5 5 5
1 3 4 5 6
C
1 3 4 5 6
C
B B
1
1
160
136
.5
c
b
a
e
m
p
n
IRB 910SC-3/0.65
q
j
k
160
136
.5
a
b b
cc
dd
jk
a
f
h
g
p
m
n
IRB 910SC-3/0.55
q
136
.5
160
a a
b b
c c
d
d
j
k
ef
hg
p
m
nq
IRB 910SC-3/0.45
IRB 910SC-3/0.45 IRB 910SC-3/0.55 IRB 910SC-3/0.65140 140 1401.5 1.5 1.5150 150 150
150119 145
300 400450 550 650150 150 150
5 5 5
1 3 4 5 6
C
1 3 4 5 6
C
B B
1
1