
UE4 Biostatistiques, probabilites, mathematiquesexcerpts.numilog.com/books/9782100763672.pdf · Il...
24
5 e édition Salah Belazreg Professeur agrégé et docteur en physique, il enseigne au lycée Camille Guérin à Poitiers. Il a enseigné la biophysique en classes préparatoires aux concours de Médecine. Il est aussi interrogateur en classes préparatoires scientifiques. Rémy Perdrisot Ancien élève de l’ENS-ULM, professeur de biophysique, assesseur du Doyen de la faculté de médecine de Poitiers, responsable du premier cycle. Jean-Yves Bounaud Docteur en sciences, docteur en pharmacie et maître de conférences à la faculté de médecine de Poitiers. UE2 Physique UE3
Transcript of UE4 Biostatistiques, probabilites, mathematiquesexcerpts.numilog.com/books/9782100763672.pdf · Il...
5e édition
Salah BelazregProfesseur agrégé et docteur en physique, il enseigne au lycée Camille Guérin à Poitiers. Il a enseigné la biophysique en classes préparatoires aux concours de Médecine. Il est aussi interrogateur en classes préparatoires scientifiques.
Rémy PerdrisotAncien élève de l’ENS-ULM, professeur de biophysique, assesseur du Doyen de la faculté de médecine de Poitiers, responsable du premier cycle.
Jean-Yves BounaudDocteur en sciences, docteur en pharmacie et maître de conférences à la faculté de médecine de Poitiers.
UE2PhysiqueUE3

c© EdiScience, 2006, 2009, 2010, 2014, 2017
EdiScience est une marque deDunod Éditeur, 11 rue Paul Bert, 92240 Malakoff
www.dunod.com
ISBN 978-2-10-076367-2
Avant-propos
« Pour qui réfléchit, le comble du bonheur est d’avoir compris ce qui est compréhen-sible et de respecter ce qui ne l’est pas. »
Goethe (Johann Wolfgang von).
Cet ouvrage « tout-en-un » est la 5e édition du manuel de physique, de la collectionPACES (première année commune aux études de santé), paru en janvier 2004. Avec lemanuel de Biophysique de la même collection, ils couvrent la totalité du programmede la rentrée 2017, mis en place lors de la réforme de la PACES (PAES) L1 Santé(réforme mise en place à la rentrée 2010). Il est complètement revu et corrigé.Il est le fruit d’une longue expérience et de nombreuses années d’enseignement de laphysique dans le secondaire et le supérieur. Il s’adresse principalement aux étudiantsde 1re année santé pour la préparation des concours Médecine-Pharmacie-DentaireSage femme, mais il intéressera également les étudiants en classes préparatoires bio-véto, agro ainsi que les étudiants en 1re et 2e année de Licence scientifique (L1 et L2).Son but est de présenter de façon claire et progressive l’ensemble des notions àconnaître de l’unité UE3 « Organisation des appareils et des systèmes : Bases phy-siques des méthodes d’exploration – Aspects fonctionnels » de première année santé(PACES).Son usage suppose que l’étudiant ait une connaissance complète du programme ac-tuel des premières et terminales scientifiques.Il présente de nombreux sujets d’adaptation progressive aux programmes et aux exi-gences de ces concours et examens difficiles.En effet, chaque chapitre indique clairement les objectifs à atteindre et comporte,en plus du cours et d’une synthèse finale, des exercices et des QCM de difficultésvariées :
– Les cours, exposés de façon détaillée, présentent les résultats fondamentaux ainsique des compléments sur des notions plus délicates.
– Les exercices, classés par niveaux de difficultés, sont tous suivis de leurs solutionsdétaillées. Ils permettront ainsi aux étudiants une démarche graduée : chercher seul,c ©
Dun
od.To
utereprod
uctio
nno
nau
toriséeestu
ndé
lit.
III

s’isnpirer des exemples et des applications du cours, et, au final, tirer le maximum deprofit de chaque mise en situation.
– Les QCM, en fin de chaque chapitre, sont de véritables exercices de réflexion.Ainsi, avant de proposer des solutions rapides et sans démarches rigoureuses, il im-porte de bien connaître la totalité du cours, et pas seulement les formules. Une résolu-tion approfondie vous permettra de vous entraîner à ce type d’épreuve afin de gagnercompétence et rapidité.
Comme pour les précédentes éditions, j’espère que cet ouvrage constituera pour lesétudiants un outil précieux pour la préparation de ces concours et examens difficiles,et leur souhaite bon courage.
Remerciements
Je remercie très sincérement le Professeur Rémy Perdrisot du service de biophysiqueet médecine nucléaire de la faculté de médecine et de pharmacie de Poitiers pour lesannales qu’il m’a fournies.Merci à mon épouse, le Docteur Frédérique Belazreg, pour son aide, sa relecture desdifférents chapitres, ses conseils pour les exemples et les applications médicales citésdans ce manuel.Mes remerciements vont également aux éditions Dunod pour le soin et la présentationapportés à la réalisation de cet ouvrage.Merci enfin à tous les étudiants qui ont donné une place à ce manuel et au succèsqu’il a jusqu’alors rencontré.Que les lecteurs, collègues enseignants et étudiants, qui voudront bien me formulerleurs remarques constructives et critiques ou me présenter leurs suggestions succep-tibles d’améliorer cet ouvrage en soient par avance remerciés.
Poitiers, février 2017 Salah Belazreg
Attention
Pour les QCM, chaque question comporte une ou plusieurs réponses exactes. Vous devezindiquer pour chacune d’elles si elle est vraie (en cochant la proposition) ou fausse
Avant-propos
IV
Table des matières
Avant-propos III
Chapitre 1Grandeurs physiques. Équations aux dimensions 1
1. Les grandeurs physiques 1
2. Système international d’unités 2
3. Équations aux dimensions 2
4. Analyse dimensionnelle 3
QCM corrigés 4
Chapitre 2Cinématique du point 6
1. Référentiels et repères 6
2. Vitesse et accélération 10
3. Étude de quelques mouvements 13
4. Mouvements relatifs et absolus 16
Exercices et QCM corrigés 19
Chapitre 3Dynamique newtonienne 30
1. Les différentes actions auxquelles peut être soumisun système mécanique 30
2. Centre d’inertie. Quantité de mouvement 36
3. Le principe d’inertie (1re loi de Newton) 37
4. Les référentiels galiléens 37c ©Dun
od.To
utereprod
uctio
nno
nau
toriséeestu
ndé
lit.
V
5. Relation fondamentale de la dynamique (2e loi de Newton) 39
6. Principe des actions réciproques (3e loi de Newton) 40
7. Validité de la relation fondamentale 41
8. Conservation de la quantité de mouvement 42
9. Moment cinétique 43
Exercices et QCM corrigés 46
Chapitre 4Équilibre d’un solide – Solide en rotation autour
d’un axe fixe 59
1. Les effets d’une force 59
2. Moment d’une force 62
3. Conditions générales d’équilibre d’un solide 64
QCM et corrigés 65
Chapitre 5Travail. Puissance. Énergie 70
1. Travail et puissance d’une force 70
2. Théorème de l’énergie cinétique 73
3. Énergie potentielle Énergie mécanique 76
Exercices et QCM corrigés 78
Chapitre 6Conservation de la quantité de mouvement – Choc
entre deux particules 88
1. Définitions 88
2. Chocs entre deux particules 89
QCM et corrigés 94
Chapitre 7Électrostatique 100
1. Champ et potentiel électrostatique 100
Table des matières
VI
2. Le dipôle électrostatique 109
Exercices et QCM corrigés 111
Chapitre 8Électrocinétique des courants continus 128
1. Le courant continu 128
2. Loi d’Ohm 131
3. Conductivité. Mobilité 135
4. Énergie électrique 137
5. Force électromotrice d’un générateur. Force contre électro-motrice d’un récepteur 138
Exercices et QCM corrigés 141
Chapitre 9Électromagnétisme 151
1. Le champ magnétique 151
2. Champ d’induction magnétique créé par un élémentde courant 154
3. Flux d’induction magnétique 157
4. Action d’un champ magnétique sur un élément de circuitparcouru par un courant 158
5. Action d’un champ magnétique−→B sur un circuit fermé 161
Exercices et QCM corrigés 164
Chapitre 10Mouvement d’une particule chargée
dans un champ uniforme 175
1. Action d’un champ électrique uniforme sur une particulechargée 175
2. Action d’un champ magnétique uniforme sur une particulechargée 179
Exercices et QCM corrigés 184
Table des matièresc ©
Dun
od.To
utereprod
uctio
nno
nau
toriséeestu
ndé
lit.
VII
Chapitre 11Courants transitoires 195
1. Réponse d’un circuit R,C à un échelon de tension 195
2. Applications 201
3. Réponse d’un circuit R,L à un échelon de tension 204
Exercices et QCM corrigés 207
Chapitre 12Mécanique des fluides 217
1. Généralités sur les fluides 217
2. Fluide en équilibre 220
3. Fluide en mouvement (ou dynamique des fluides) 223
4. Dynamique des fluides réels 227
Exercices et QCM corrigés 231
Chapitre 13Les phénomènes de surface 247
1. Tension superficielle des liquides 247
2. Ascension capillaire 253
Exercices et QCM corrigés 255
Chapitre 14Thermodynamique 262
1. Le gaz parfait. Théorie cinétique 262
2. Premier principe ou principe de la conservationde l’énergie 267
3. Second principe ou principe d’évolution 271
4. Équilibre d’un corps pur sous deux phases 271
Exercices et QCM corrigés 275
Chapitre 15Ondes 295
1. Généralités sur les ondes 295
Table des matières
VIII

2. Ondes stationnaires 302
3. Exemples d’ondes progressives 304
4. Vitesse du son 309
5. L’effet Doppler-Fizeau 311
6. Notions sur les ondes électromagnétiques 315
Exercices et QCM corrigés 319
Chapitre 16Interférences. Diffraction 326
1. Interférences de deux ondes 326
2. Diffraction 334
Exercices et QCM corrigés 339
Chapitre 17Le photon 350
1. L’effet photoélectrique 350
2. L’effet Compton 354
Exercices et QCM corrigés 358
Chapitre 18Niveaux d’énergie dans un atome 363
1. Spectres d’émission et d’absorption 363
2. L’atome de Bohr. Niveaux d’énergie des électrons 364
3. Spectres des atomes. Cas de l’atome d’hydrogène 369
4. L’atome de Sommerfeld 371
5. Notion de nombre quantique 374
Exercices et QCM corrigés 376
Chapitre 19Mécanique ondulatoire 384
1. Les aspects de la lumière 384
2. Onde associée à une particule 384
Table des matièresc ©
Dun
od.To
utereprod
uctio
nno
nau
toriséeestu
ndé
lit.
IX

3. Principe d’incertitude de Heisenberg 386
4. Probabilité de présence 387
5. Équation de Schrödinger 388
Exercices et QCM corrigés 390
Chapitre 20Le laser. Oscillateur à fréquence optique 396
1. Caractéristiques d’un faisceau laser 396
2. Principe de fonctionnement 399
3. Quelques applications du laser 405
Exercices et QCM corrigés 407
Chapitre 21Optique géométrique 420
1. Quelques notions de base de l’optique géométrique 420
2. Notion d’objet et d’image 425
3. Dioptres 427
4. Systèmes centrés 433
5. Les lentilles 434
Exercices et QCM corrigés 437
Chapitre 22Œil et instruments d’optique 446
1. Aberrations 446
2. L’œil 449
3. Les instruments d’optique 451
Exercices et QCM corrigés 456
Index 466
Table des matières
X
Grandeurs physiquesÉquations aux dimensions
1
PPlanlan OObjectifsbjectifs
1. Les grandeurs physiques2. Système international d’unités3. Équations aux dimensions4. Analyse dimensionnelle
• Savoir établir une équation auxdimensions
• Retrouver l’unité d’une grandeur phy-sique dans le système S.I.
La physique a pour but de décrire des phénomènes et étudier leurs propriétés : leursétudes nécessitent la définition de grandeurs physiques. À chaque grandeur physiquecorrespond une unité et l’ensemble des unités est regroupé dans un système universel,le système international.
1. Les grandeurs physiques
La physique est une science basée sur l’observation de phénomènes physiques, etl’étude de ces phénomènes nécessite la définition de grandeurs physiques.On appelle grandeur physique toute propriété physique mesurable.Une grandeur physique est mesurable si on sait définir l’égalité, la somme et le rap-port de deux grandeurs de son espèce.La mesure de la grandeur s’obtient donc par comparaison entre deux grandeurs phy-siques de même nature dont l’une est choisie comme unité.
ExempleIl est possible d’exprimer la masse d’un solide en fonction de la masse d’un solidede référence de notre choix. Pour cela, il faut choisir le solide de référence etl’unité de masse.
L’unité légale de masse (S.I.) est le kilogramme, de symbole kg. C’est par définition,la masse d’un cylindre de platine irridié déposé au bureau international des poids etmesures (pavillon de Breteuil à Sèvres).Toute masse se mettra donc sous la forme : m = x kg.c ©
Dun
od.To
utereprod
uctio
nno
nau
toriséeestu
ndé
lit.
1
2. Système international d’unitésDes grandeurs fondamentales ont été choisies : elles sont au nombre de sept (tableauci–dessous). L’ensemble des unités est regroupé dans un système cohérent et univer-sel d’unités, appelé le système international (S.I.).Toute grandeur physique peut donc s’exprimer sur la base de ces unitésfondamentales.
Grandeurs fondamentales Unités Symboles
Masse kilogramme kgLongueur mètre mTemps seconde sIntensité du courant électrique ampère ATempérature kelvin KQuantité de matière mole molIntensité lumineuse candéla cd
Unités supplémentaires
Angle plan radian radAngle solide stéradian sr
3. Équations aux dimensionsLe principe des équations aux dimensions consiste à ramener les différents para-mètres qui interviennent dans une formule aux grandeurs fondamentales du systèmeinternational d’unités.Le tableau ci-après donne quelques grandeurs physiques et leur dimension.
Grandeur physique Dimension Unité
Masse M kg
Longueur L m
Temps T s
Intensité du courant électrique I A
Exemples
� Unité d’une accélération.
Comme a =dvdt=
d2x
dt2(cas d’un mouvement rectiligne), alors
[a] =[x][t2] ([a] : se lit dimension de a).
Or [x] = L et [t] = T , donc [a] =L
T 2= LT−2
Dans le système (S.I.), une accélération s’exprime donc en m.s−2.� Unité d’une force.
Comme F = ma, alors [F] = [m] [a], soit [F] = MLT−2
Dans le système (S.I.), une force s’exprime en kg.m.s−2.
1 Cours Grandeurs physiques. Équations aux dimensions
2

Le tableau ci-dessous donne quelques grandeurs dérivées (elles dérivent des unitésfondamentales) ainsi que leurs unités.
Grandeur Équations aux dimensions Unités de base Noms
Force MLT−2 kg.m.s−2 newton : N
Pression ML−1T−2 kg.m−1.s−2 pascal : Pa
Travail ML2T−2 kg.m2.s−2 joule : J
Puissance ML2T−3 kg.m2.s−3 watt : W
Charge Q = IT A.s coulomb : C
Potentiel ML2T−2Q−1 kg.m2.s−3A−1 volt : V
Capacité M−1L−2T 2Q2 kg−1m−2s4A2 farad : F
Résistance ML2T−1Q−2 kg.m2.s−3A−2 ohm : Ω
Conductance M−1L−2T Q2 kg−1.m−2.s3A2 siemens : S
Champ magnétique MT−1Q−1 kgs−2A−1 tesla : T
Inductance ML2T−2I−2 kgm2s−2A−2 henry : H
4. Analyse dimensionnelle
L’analyse dimensionnelle permet :
� de vérifier l’homogénéité d’une formule ;
� de rechercher les relations entre les différentes grandeurs physiques liées entreselles.
ExempleL’étude du mouvement d’un pendule montre que sa période Tp dépend à priori dela masse m, de la longueur l du fil et de la valeur de g (accélération de la pesanteurdu lieu de la mesure).Supposons que la période Tp s’exprime par une relation de la forme :
Tp = Cste.mαlβgγ
La relation doit être homogène, donc[Tp
]= [m]α [l]β
[g]γ
Comme [m] = M, [l] = L et[g]= LT−2, alors
[Tp
]= T = MαLβ(LT−2)γ =
MαLβ+γT−2γ
L’identification des exposants des différentes dimensions conduit à :
⎧⎪⎪⎪⎨⎪⎪⎪⎩α = 0β + γ = 0−2γ = 1
d’où
⎧⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎩α = 0
β =12
γ = −12
La période du pendule simple s’écrit donc : Tp = Cste.l12 g− 1
2 = Cste
√lg
Cours 1Grandeurs physiques. Équations aux dimensionsc ©
Dun
od.To
utereprod
uctio
nno
nau
toriséeestu
ndé
lit.
3

SSynthèseynthèse
Je sais définir• Une grandeur physique• Le système international d’unités
Je connais• Le principe des équations aux
dimensions• Les unités de base des grandeurs
physiques usuelles
Je sais• Établir une équation aux dimensions• Retrouver l’unité d’une grandeur physique dans le système S.I.
QQuestions à choix multiplesuestions à choix multiples
1 Un corps solide, en mouvement dans un fluide visqueux, reçoit de la part du fluide une
force de frottement−→f .
Dans le cas d’un écoulement laminaire et pour un corps sphérique de rayon r,−→f = −6πηr−→v où η représente le coefficient de viscosité du fluide et−→v le vecteur vitessedu solide.La dimension de η est : ❒ 1. L−1.T−1 ❒ 2. M.L−1.T−1
L’unité de η dans le système S.I. est : ❒ 3. N.m−2.s ❒ 4. Pa.s ❒ 5. kg.s−1.m−1
2 La valeur de la force d’interaction entre deux corps ponctuels, séparés d’une distance ret portant respectivement les charges q1 et q2, est donnée par la loi de Coulomb :
f =1
4πε0
|q1q2|r2
❒ 1. La dimension de f est M.L−1.T−2,❒ 2. L’unité de f est le kg.m.s−2.
3. La dimension de ε0 est : ❒ a) M.L−3.T4.A ❒ b) M−1.L−3.T4.A2.
❒ 4. L’unité de ε0 est kg−1.m−3.s4.A2.
3 Isaac Newton établit au XVIIe siècle l’expression de la célérité du son dans l’air :
v =
√Pμ
avec
∣∣∣∣∣∣ P : pression de l’air ;μ : masse volumique de l’air
La dimension de P est :❒ 1. M3.L2.T−2 ❒ 3. M.L−1.T−2 ❒ 5. M−1.L.T−2
❒ 2. M−2.L.T−1 ❒ 4. M.L.T−1
1 Entraînement Grandeurs physiques. Équations aux dimensions
4

CCorrigésorrigés
1 Bonnes réponses 2. et 5.
De f = 6πηrv, il vient : [η] =[ f ]
[r].[v]De f = ma, on déduit [ f ] = M.L.T−2.
Ainsi : [η] =M.L.T−2
L.L.T−1= M.L−1.T−1
L’unité de η est donc le kg.m−1.s−1.
2 Bonnes réponses 2. 3.b. et 4.De f = ma (2eme loi de Newton), on déduit [ f ] = [m] · [a]Comme [m] = M et [a] = L.T−2, alors [ f ] = M.L.T−2.L’unité de f est donc le kg.m.s−2.
On a f =1
4πε0
|q1q2|r2
, donc : ε0 =1
4π f|q1q2|
r2
Et par suite : [ε0] =1[ f ]
[q]2
[r]2
Déterminons la dimension d’une charge.De la définition de l’intensité d’un courant électrique (qui est débit de charges), il vient :
i =dqdt
, soit dq = idt
Ainsi [q] = [i].[Δt] = I.T.
Dimension de ε0 : [ε0] =1
M.L.T−2(I.T)2
L2= M−1.L−3.T4.I2
L’unité de ε0 est donc le kg−1.m−3.s4.A2.
3 Bonne réponse 3.
Comme v =
√Pμ, alors v2 =
Pμ. Ainsi P = v2 · μ
Comme [v] = L.T−1 et [μ] = M.L−3, alors [P] = (L.T−1)2 × M.L−3 = L2.T−2 × M.L−3
= M.L−1.T−2
Entraînement 1Grandeurs physiques. Équations aux dimensionsc ©
Dun
od.To
utereprod
uctio
nno
nau
toriséeestu
ndé
lit.
5

2 Cinématique du point
PPlanlan OObjectifsbjectifs
1. Référentiels et repères2. Vitesse et accélération3. Étude de quelques mouvements4. Mouvements relatifs et absolus
• Savoir repérer un mobile dans les diffé-rents systèmes de coordonnées
• Savoir établir l’expression d’une vitesseet d’une accélération dans les différentssystèmes de coordonnées
• Savoir calculer une vitesse et une accé-lération
• Déterminer l’équation d’une trajectoiredans un référentiel donné
• Savoir faire une décomposition de vi-tesse et d’accélération
La cinématique est l’étude du mouvement d’un corps indépendamment des actionsqui le produisent et qui sont capables de le modifier. Dans ce chapitre, on s’intéresseau mouvement d’un point matériel, objet de dimensions négligeables par rapport auxdistances parcourues. Dans le cas d’un solide (ensemble de points matériels), on s’in-téressera au mouvement d’un point particulier : le centre d’inertie G du solide. Lemobile désignera donc, soit le point matériel M, soit le centre d’inertie G du solide.
1. Référentiels et repères
1.1. La relativité du mouvement
Un objet est en mouvement par rapport à un autre objet (celui qui sert de référence)si sa position change au cours du temps par rapport à cet objet de référence.
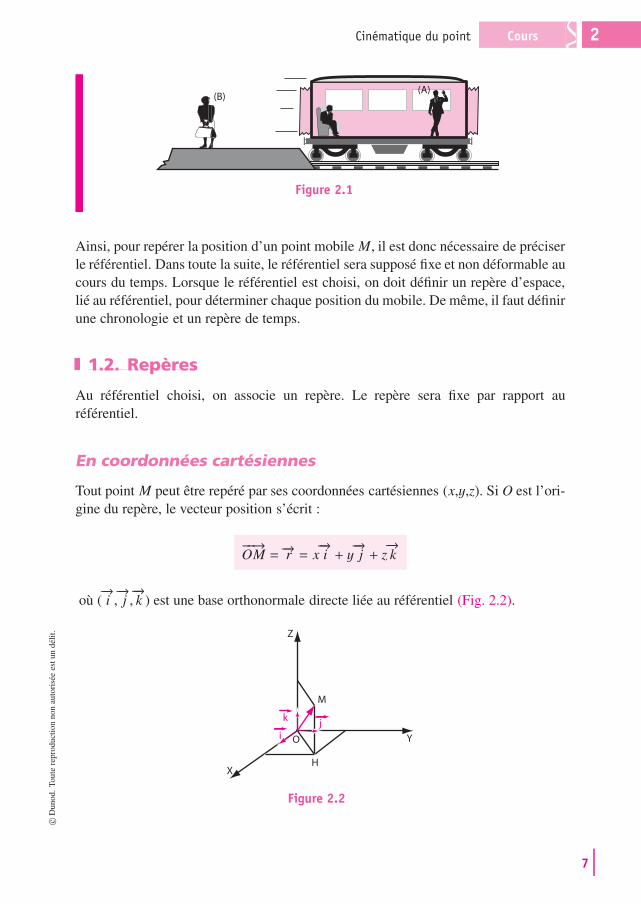
ExempleObservons le mouvement d’une personne assise dans un train. Pour un observateur(A) situé dans le même wagon, cette personne peut apparaître immobile ; maispour un observateur (B) situé sur le quai d’une gare, et qui voit passer le train, lapersonne assise se déplace bien sûr en même temps que celui-ci (Fig. 2.1).
6
(B)(A)
Figure 2.1
Ainsi, pour repérer la position d’un point mobile M, il est donc nécessaire de préciserle référentiel. Dans toute la suite, le référentiel sera supposé fixe et non déformable aucours du temps. Lorsque le référentiel est choisi, on doit définir un repère d’espace,lié au référentiel, pour déterminer chaque position du mobile. De même, il faut définirune chronologie et un repère de temps.
1.2. Repères
Au référentiel choisi, on associe un repère. Le repère sera fixe par rapport auréférentiel.
En coordonnées cartésiennes
Tout point M peut être repéré par ses coordonnées cartésiennes (x,y,z). Si O est l’ori-gine du repère, le vecteur position s’écrit :
−−→OM = −→r = x
−→i + y
−→j + z−→k
où (−→i ,−→j ,−→k ) est une base orthonormale directe liée au référentiel (Fig. 2.2).
O
X
Y
Z
M
ijk
H
Figure 2.2
Cours 2Cinématique du pointc ©
Dun
od.To
utereprod
uctio
nno
nau
toriséeestu
ndé
lit.
7

En coordonnées polaires (cas d’un mouvement plan)
On définit un axe Ox, axe polaire, et une origine O ou pôle.Un point mobile M peut être repéré par ses coordonnées polaires (r,θ) où r = OM et
θ = (−→Ox,−−→OM) (Fig. 2.3).
O x
y
M
uru
r
i
jθ
θ
Figure 2.3
Le vecteur position s’écrit donc :−−→OM = −→r = r−→ur .
où −→r est appelé rayon vecteur et θ l’angle polaire,et (−→ur,
−→uθ) est une base locale mobile, orthonormée directe, liée à M.
En coordonnées cylindriques
Le mobile sera repéré par ses coordonnées cylindriques (r,θ,z) et le vecteur
position s’écrit :−−→OM = −→r = −−→OH +
−−−→HM = r−→ur + z−→uz.
où (−→ur ,−→uθ,−→uz) est une base orthonormée directe mobile liée à H (Fig. 2.4).
O
X
Y
Z
M
z
H ur
uθ
uzθr
Figure 2.4
En coordonnées sphériques
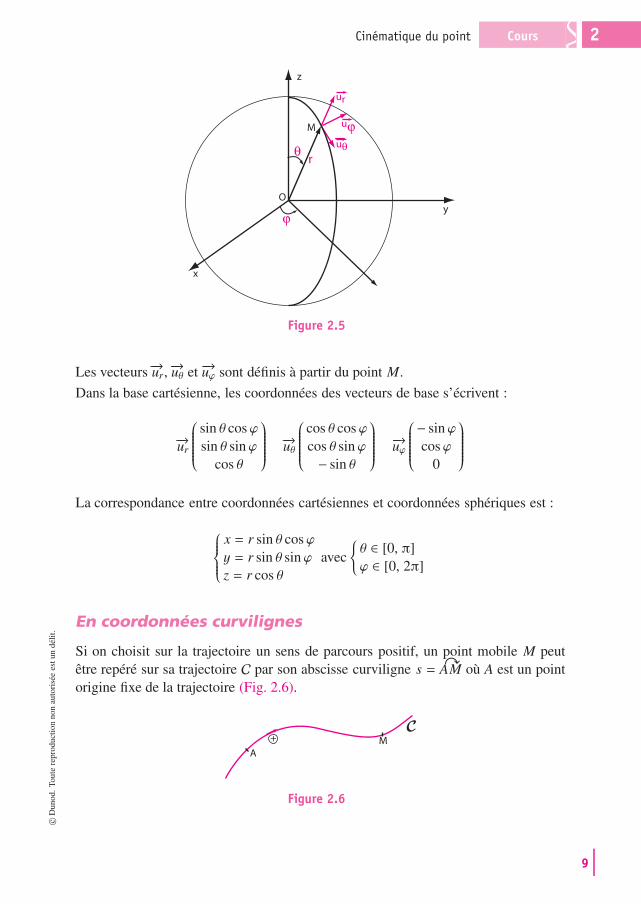
Le mobile sera repéré par ses coordonnées sphériques (r,θ,ϕ) et le vecteur position
s’écrit−−→OM = −→r = r−→ur (Fig. 2.5).
2 Cours Cinématique du point
8
O
M
ur
uθ
uϕ
ϕ
r
x
y
z
θ
Figure 2.5
Les vecteurs −→ur,−→uθ et −→uϕ sont définis à partir du point M.
Dans la base cartésienne, les coordonnées des vecteurs de base s’écrivent :
−→ur
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎝sin θ cos ϕsin θ sin ϕ
cos θ
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎠ −→uθ⎛⎜⎜⎜⎜⎜⎜⎜⎜⎝cos θ cos ϕcos θ sin ϕ− sin θ
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎠ −→uϕ⎛⎜⎜⎜⎜⎜⎜⎜⎜⎝− sin ϕcos ϕ0
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎠La correspondance entre coordonnées cartésiennes et coordonnées sphériques est :
⎧⎪⎪⎪⎨⎪⎪⎪⎩x = r sin θ cos ϕy = r sin θ sin ϕz = r cos θ
avec
{θ ∈ [0, π]ϕ ∈ [0, 2π]
En coordonnées curvilignes
Si on choisit sur la trajectoire un sens de parcours positif, un point mobile M peutêtre repéré sur sa trajectoire C par son abscisse curviligne s =
�
AM où A est un pointorigine fixe de la trajectoire (Fig. 2.6).
MA
+C
Figure 2.6
Cours 2Cinématique du pointc ©
Dun
od.To
utereprod
uctio
nno
nau
toriséeestu
ndé
lit.
9
2. Vitesse et accélération
2.1. Vitesse
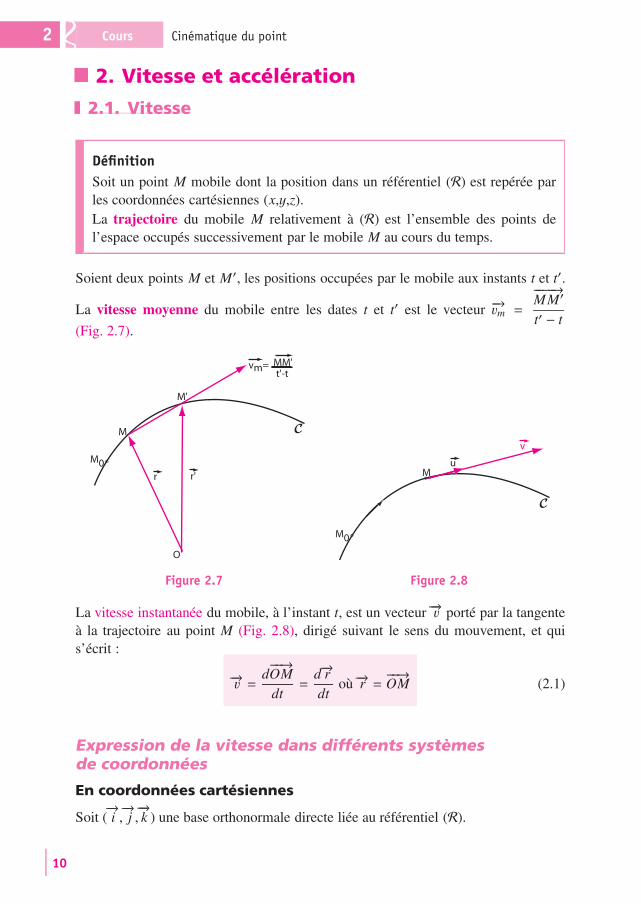
DéfinitionSoit un point M mobile dont la position dans un référentiel (R) est repérée parles coordonnées cartésiennes (x,y,z).La trajectoire du mobile M relativement à (R) est l’ensemble des points del’espace occupés successivement par le mobile M au cours du temps.
Soient deux points M et M′, les positions occupées par le mobile aux instants t et t′.
La vitesse moyenne du mobile entre les dates t et t′ est le vecteur −→vm =−−−−→MM′
t′ − t(Fig. 2.7).
M
M'
vm= MM't'-t
O
M0r r'
C
°
Figure 2.7
M
M0
C
°
v
u
°
Figure 2.8
La vitesse instantanée du mobile, à l’instant t, est un vecteur −→v porté par la tangenteà la trajectoire au point M (Fig. 2.8), dirigé suivant le sens du mouvement, et quis’écrit :
−→v = d−−→OMdt=
d−→rdt
où −→r = −−→OM (2.1)
Expression de la vitesse dans différents systèmesde coordonnées
En coordonnées cartésiennes
Soit (−→i ,−→j ,−→k ) une base orthonormale directe liée au référentiel (R).
2 Cours Cinématique du point
10

Le vecteur position s’exprime : −→r = −−→OM = x−→i + y
−→j + z−→k .
Ainsi :
−→v = dxdt−→i +
dydt−→j +
dzdt−→k car
−→i ,−→j et−→k sont des vecteurs constants.
Si on pose x =dxdt
, y =dydt
et z =dzdt
, alors −→v a pour coordonnées
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
x =dxdt
y =dydt
z =dzdt
(2.2)
En coordonnées polaires (cas d’un mouvement plan)
Le point M est repéré par ses coordonnées polaires (r,θ) « mais ici, la base employée(−→ur,−→uθ) est mobile par rapport au repère ».
Le vecteur position −→r = −−→OM s’écrit donc −→r = r−→ur.
Le vecteur vitesse est : −→v =−→drdt=
ddt
(r−→ur
), soit
−→v = drdt−→ur + r
d−→ur
dt= r−→ur + rθ−→uθ (2.3)
card−→ur
dt= θ−→uθ (voir exercice 2)
Les composantes de −→v sont donc :
{rrθ
Dans le repère de Frenet (Cas d’une trajectoire plane)
On introduit un repère mobile (−→τ ,−→n ) (Fig. 2.9), lié au mobile M tel que :⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩−→τ : vecteur unitaire porté par la tangente à la courbe et orienté dans le sens du
mouvement ;−→n : vecteur unitaire orthogonal à −→τ et dirigé vers la concavité de la trajectoire.
On a alors −→v = v−→τ .ρ représente le rayon de courbure de la trajectoire : c’est le rayon du cercle tangent àla trajectoire sur une petite portion autour du point M (Fig. 2.9).
Cours 2Cinématique du pointc ©
Dun
od.To
utereprod
uctio
nno
nau
toriséeestu
ndé
lit.
11

M
M0
C°
°τ
ρ
n
+O
+
°M τ
n
ρ
O+
Figure 2.9
� Si la trajectoire est un cercle de rayon R, ρ = R.
� Si la trajectroire est une droite, le rayon de courbure ρ tend vers l’infini.
En coordonnées cylindriques
Le point M est repéré par ses coordonnées cylindriques (r,θ,z).
Le vecteur position−−→OM s’écrit donc
−−→OM =
−−→OH +
−−−→HM = r−→ur + z−→uz.
Ainsi −→v =−−−−→dOM
dt= r−→ur + rθ−→uθ + z−→uz.
2.2. Accélération
DéfinitionL’accélération du mobile, à l’instant t, est la dérivée dans (R) par rapport autemps, du vecteur vitesse, soit :
−→a =−→dvdt=
d2−→rdt2
(2.4)
Expression de l’accélération dans différents systèmesde coordonnées
En coordonnées cartésiennes
Comme −→v = dxdt−→i +
dydt−→j +
dzdt−→k , alors
−→a = d−→vdt=
d2x
dt2−→i +
d2y
dt2−→j +
d2z
dt2−→k = x
−→i + y
−→j + z−→k (2.5)
2 Cours Cinématique du point
12
En coordonnées polaires
−→a =−→dvdt=
ddt
(r−→ur + rθ−→uθ
)= r−→ur + rθ−→uθ + rθ−→uθ + rθ−→uθ − rθ2−→ur, soit
−→a = (r − rθ2)−→ur + (rθ + 2rθ)−→uθ
avecd−→ur
dt= θ−→uθ et
d−→uθdt= − θ−→ur.
Dans le repère de Frenet
−→a = aτ−→τ + an
−→n avec
⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩aτ =
dvdt
an =v2
ρ
En coordonnées cylindriques
−→a =−→dvdt= (r − rθ2)−→ur + (rθ + 2rθ)−→uθ + z−→uz
3. Étude de quelques mouvements
3.1. Les mouvements rectilignes
Figure 2.10
Le mobile M se déplace le longd’une droite sur laquelle sera choisi
un vecteur unitaire−→i (Fig. 2.10).
La trajectoire rectiligne sera orien-tée selon un axe x′Ox.Le vecteur position s’écrit donc
−−→OM = x
−→i .
On déduit donc −→v = x−→i et −→a = x
−→i .
Mouvement rectiligne uniforme
Suivant l’axe x′Ox la vitesse instantanée est −→v = −→v0 = v0−→i = −−→cste.Comme −→v = −−→cste alors −→a = d−→v
dt=−→0 .
De plus, comme v =dxdt= v0 alors, x =
∫ t
0 v0dt = v0t + x0 où x0 est l’abscisse du
point M à la date t = 0.
Cours 2Cinématique du pointc ©
Dun
od.To
utereprod
uctio
nno
nau
toriséeestu
ndé
lit.
13

Pour un mouvement rectiligne uniforme, on a donc :⎧⎪⎪⎨⎪⎪⎩v = v0 = cste
x = v0t + x0(2.6)
Remarque
Dans l’écriture v =dxdt
, v ne représente pas la norme de la vitesse.
Mouvement rectiligne uniformément varié
Le mouvement est rectiligne uniformément varié si −→a = −→a0 = a0−→i =−−→cste.
� Le mouvement est accéléré si −→a .−→v > 0.
� Le mouvement est décéléré si −→a .−→v < 0.
Comme −→a = d−→vdt
alors v =∫ t
0 a0dt = a0t + v0 où v0 est la vitesse du mobile à t = 0.
Ainsi x =12
a0t2 + v0t + x0 (x0 abscisse du mobile à t = 0).
Pour un mouvement rectiligne uniformément varié, on a donc⎧⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎩(1) a = a0 = cste
(2) v = a0t + v0
(3) x =12
a0t2 + v0t + x0
(2.7)
En éliminant t entre les équations (2) et (3) de la relation (2.7), on obtient (voir dé-monstration, exercice 1) :
v2 − v20 = 2a0(x − x0) (2.8)
Mouvement rectiligne sinusoïdal
Un mobile est animé d’un mouvement rectiligne sinusoïdal si sa trajectoire est unedroite et sa loi horaire est une fonction sinusoïdale du temps, soit :
x(t) = xm sin(ωt + φ)
∣∣∣∣∣∣∣∣∣∣∣xm : amplitude du mouvement en mω : pulsation en rad.s−1φ : phase à l’origine en radωt + φ : phase à la date t en rad
Le mobile M se déplace entre deux positions extrêmes M1 et M2 d’abscisses xm
et −xm.
La vitesse du mobile
Comme v =dxdt
alors v = x = ωxm cos(ωt + φ).
2 Cours Cinématique du point
14










![SOMMAIRE DES COURS PARTIE CLINIQUE · PROGRAMME PSYCHIATRIE. FACULTE DE MEDECINE ALGER 2019 [19] COURS gences psychiatriques ur Troubles psychotiques aigus et transitoires Confusion](https://static.fdocuments.fr/doc/165x107/5e030950d9e2ea2f204175c0/sommaire-des-cours-partie-clinique-programme-psychiatrie-faculte-de-medecine-alger.jpg)







