
Théorie des mécanismes Sciences - s2i.chaptal.free.frs2i.chaptal.free.fr/SI/S8/C1.pdf · Théorie...
30
LYCEE CHAPTAL COURS PTSI Séquence 8 Théorie des mécanismes CPGE PTSI/PT* Classe entière B11 - Identifier paramètres entrée/sortie cinématique B222 - Définir les ddl d'un solide B223 - Paramétrer un mécanisme simple B224 - Modéliser la cinématique d'un solide (trajectoire, torseur cinématique, accélération) B225 - Modéliser les liaisons entre solides B230 - Déterminer une liaison équivalente B231 -Déterminer h et m B232 Identifier les conséquences géométriques de h 4h 2017/2018 Théorie des mécanismes Sciences Industrielles pour l’Ingénieur
Transcript of Théorie des mécanismes Sciences - s2i.chaptal.free.frs2i.chaptal.free.fr/SI/S8/C1.pdf · Théorie...
LYCEE CHAPTAL
COURS
PTSI
Séquence 8
Théorie des mécanismes
CPGE
PTSI/PT*
Classe
entière
B11 - Identifier paramètres entrée/sortie cinématique
B222 - Définir les ddl d'un solide
B223 - Paramétrer un mécanisme simple
B224 - Modéliser la cinématique d'un solide (trajectoire, torseur cinématique, accélération)
B225 - Modéliser les liaisons entre solides
B230 - Déterminer une liaison équivalente
B231 -Déterminer h et m
B232 Identifier les conséquences géométriques de h
4h
2017/2018
Théorie des mécanismes
Sciences Industrielles
pour l’Ingénieur
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page2sur30
Théorie des mécanismes
Tabledesmatières1. Liaisons normalisées en cinématique ................................................................ 4
1.1. Tableau récapitulatif des liaisons normalisées : ............................................ 4 1.2. Modélisation plane............................................................................................... 6
2. Rappels(rappel cf cours « modélisation cinématique ») ................................ 7
2.1. Les différents schémas ..................................................................................... 7 2.2. Chaînes de solides ............................................................................................... 8 2.3. Loi entrée-sorties ............................................................................................... 9
3. Liaisons équivalentes ........................................................................................ 10
3.1. Liaisons en série ................................................................................................ 10 3.2. Liaisons en parallèle .......................................................................................... 12 3.3. Méthode statique .............................................................................................. 14
4. Modélisation et structure d’une chaîne fermée de solide .......................... 16
4.1. Objectif .............................................................................................................. 16 4.2. Le nombre cyclomatique 𝛾 ................................................................................ 17
5. Approche cinématique de la théorie des mécanismes ................................. 17
5.1. Nombre d’équations cinématiques EC ............................................................. 18 5.2. Nombre d'inconnues cinématiques IC ............................................................. 18 5.3. Mobilité d’un mécanisme m .............................................................................. 18 5.4. Degré d'hyperstaticité h ................................................................................. 22
6. Approche statique de la théorie des mécanismes........................................ 24
6.1. Nombre d'équations statiques ES ................................................................... 24 6.2. Nombre d'inconnues statiques IS ................................................................... 24 6.3. Degré d'hyperstaticité h ................................................................................. 25 6.4. Mobilité d’un mécanisme m .............................................................................. 25
7. Mise en évidence géométrique de l’hyperstaticité ...................................... 28
7.1. Tolérancement géométrique ............................................................................ 28 7.2. Rendre l’assemblage isostatique ..................................................................... 29
8. Quelle approche privilégier ? .......................................................................... 30
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page3sur30
Ø Compétences visées par la séance
B1 - Justifier ou choisir les grandeurs nécessaires à la modélisation
B11 - Identifier paramètres entrée/sortie cinématique
B2 - Proposer un modèle B222 - Définir les ddl d'un solide
B223 - Paramétrer un mécanisme simple
B224 - Modéliser la cinématique d'un solide (trajectoire, torseur cinématique, accélération)
B225 - Modéliser les liaisons entre solides
B230 - Déterminer une liaison équivalente
B231 -Déterminer h et m
B232 Identifier les conséquences géométriques de h
Ø Introduction La théorie des mécanismes s'appuie sur l'étude des chaînes fermées de solides et a pour buts :
ü l'analyse de la structure d'un mécanisme, afin d'émettre un avis sur la pertinence des solutions adoptées pour remplir la fonction mécanique souhaitée.
ü la détermination de la(les) loi(s) entrée-sortie. ü l'analyse de la transmission d'énergie en vue du dimensionnement des organes
mécaniques.
L’analyse des chaînes fermées de solides est orientée dans ce cours vers la recherche, d’une part, de caractéristiques telles que l’iso ou l’hyperstaticité (ou hyperstatisme) et, d’autre part, la recherche de solution technologique qui permettent de maitriser ou modifier l’hyperstaticité.
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page4sur30
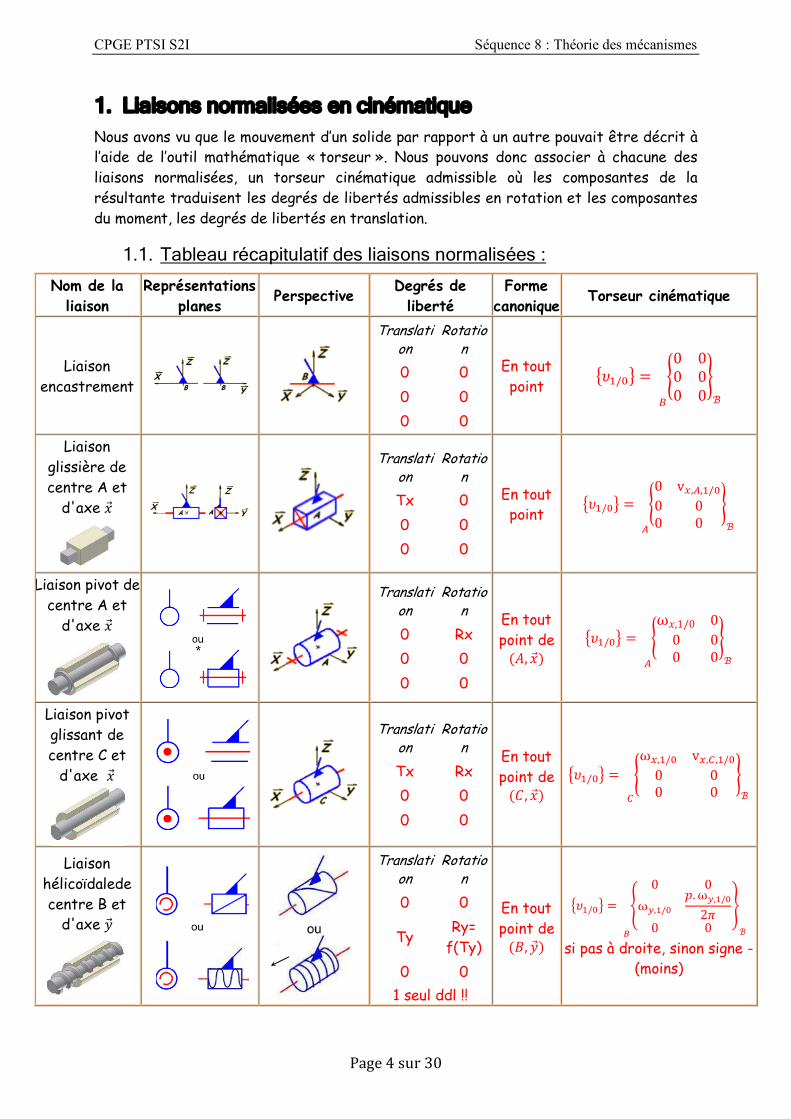
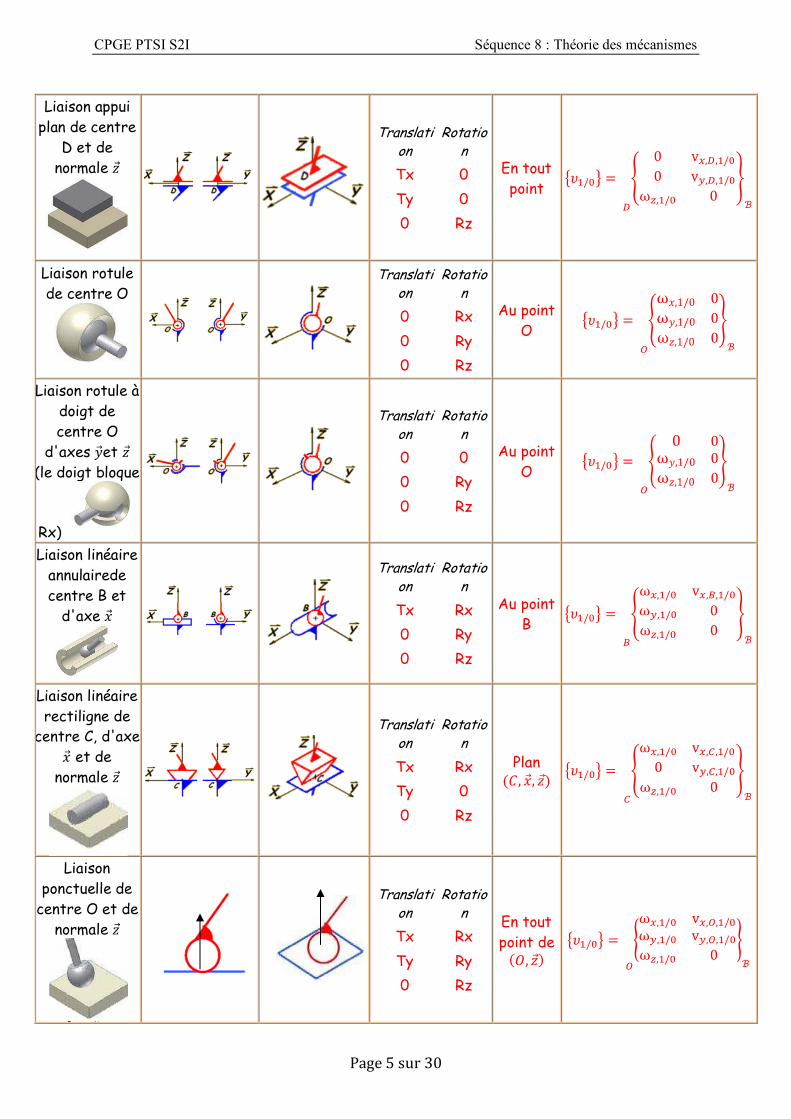
1. Liaisons normalisées en cinématique Nous avons vu que le mouvement d’un solide par rapport à un autre pouvait être décrit à l’aide de l’outil mathématique « torseur ». Nous pouvons donc associer à chacune des liaisons normalisées, un torseur cinématique admissible où les composantes de la résultante traduisent les degrés de libertés admissibles en rotation et les composantes du moment, les degrés de libertés en translation.
1.1. Tableau récapitulatif des liaisons normalisées :
Nom de la liaison
Représentations planes Perspective Degrés de
liberté Forme
canonique Torseur cinématique
Liaison encastrement
Translation
Rotation
0 0 0 0 0 0
En tout point
"𝜐$/&' = )0 00 00 0
+ℬ-
Liaison glissière de centre A et
d'axe �⃗�
Translation
Rotation
Tx 0 0 0 0 0
En tout point
"𝜐$/&' = )0 v1,3,$/&0 00 0
+ℬ3
Liaison pivot de centre A et
d'axe �⃗�
Translation
Rotation
0 Rx 0 0 0 0
En tout point de (𝐴, �⃗�)
"𝜐$/&' = )ω𝑥,1/0 00 00 0
+ℬ3
Liaison pivot glissant de centre C et
d'axe �⃗�
Translation
Rotation
Tx Rx 0 0 0 0
En tout point de (𝐶, �⃗�)
"𝜐$/&' = )ω1,$/& v1,:,$/&0 00 0
+ℬ:
Liaison hélicoïdalede centre B et
d'axe �⃗�
Translation
Rotation
0 0
Ty Ry= f(Ty)
0 0 1 seul ddl !!
En tout point de (𝐵, �⃗�)
"𝜐$/&' = =0 0
ω>,$/&𝑝.ω>,$/&
2𝜋0 0
C
ℬ-
si pas à droite, sinon signe - (moins) y
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page5sur30
Liaison appui plan de centre
D et de normale 𝑧
Translation
Rotation
Tx 0 Ty 0 0 Rz
En tout point
"𝜐$/&' = =0 v1,E,$/&0 v>,E,$/&
ωF,$/& 0C
ℬE
Liaison rotule de centre O
Translation
Rotation
0 Rx 0 Ry 0 Rz
Au point O
"𝜐$/&' = =ω𝑥,1/0 0ω𝑦,1/0 0ω𝑧,1/0 0
C
ℬG
Liaison rotule à doigt de centre O
d'axes �⃗�et 𝑧 (le doigt bloque
Rx)
Translation
Rotation
0 0 0 Ry 0 Rz
Au point O
"𝜐$/&' = =0 0
ω𝑦,1/0 0ω𝑧,1/0 0
C
ℬG
Liaison linéaire annulairede centre B et
d'axe �⃗�
Translation
Rotation
Tx Rx 0 Ry 0 Rz
Au point B
"𝜐$/&' = =ω1,$/& v1,-,$/&ω>,$/& 0ωF,$/& 0
C
ℬ-
Liaison linéaire rectiligne de
centre C, d'axe �⃗� et de
normale 𝑧
Translation
Rotation
Tx Rx Ty 0 0 Rz
Plan (𝐶, �⃗�, 𝑧) "𝜐$/&' = =
ω1,$/& v1,:,$/&0 v>,:,$/&
ωF,$/& 0C
ℬ:
Liaison ponctuelle de
centre O et de normale 𝑧
Translation
Rotation
Tx Rx Ty Ry 0 Rz
En tout point de (𝑂, 𝑧)
"𝜐$/&' = )ω1,$/& v1,G,$/&ω>,$/& v>,G,$/&ωF,$/& 0
+ℬG
z
z

CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page6sur30
1.2. Modélisation plane
Lorsque l’on peut considérer le problème plan, c'est-à-dire :
• Les vitesses des points sont dans des plans parallèles Pi • Les vitesses de rotation sont orthogonales à ces mêmes plans Pi
Alors les torseurs cinématiques peuvent s’exprimer avec trois composantes :
"𝑣J/$' = )𝜔1,J/$ 𝑣31,J/$𝜔>,J/$ 𝑣3>,J/$𝜔F,J/$ 𝑣3F,J/$
+(1⃗,>L⃗ ,F⃗)3
⬚
"𝑣J/$' = )𝜔1,J/$ 𝑣31,J/$𝜔>,J/$ 𝑣3>,J/$𝜔F,J/$ 𝑣3F,J/$
+(1⃗,>L⃗ ,F⃗)3
⬚
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page7sur30
2. Rappels(rappel cf cours « modélisation cinématique »)
2.1. Les différents schémas
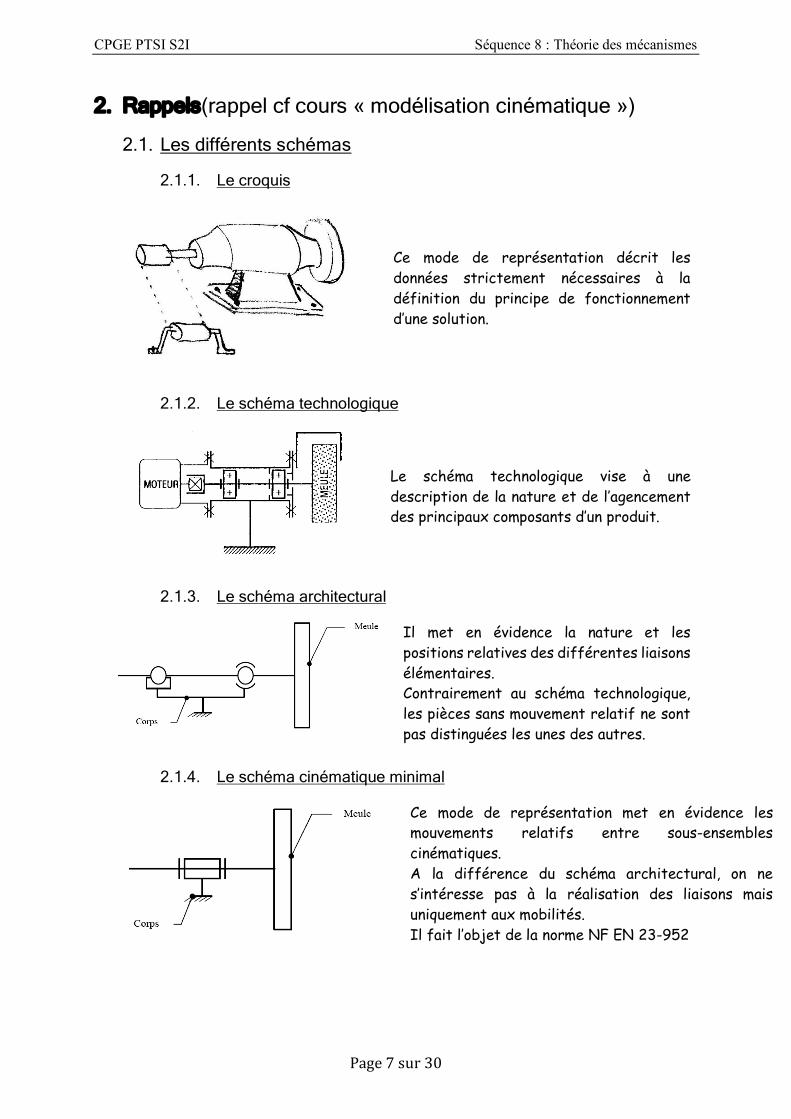
2.1.1. Le croquis
Ce mode de représentation décrit les données strictement nécessaires à la définition du principe de fonctionnement d’une solution.
2.1.2. Le schéma technologique
Le schéma technologique vise à une description de la nature et de l’agencement des principaux composants d’un produit.
2.1.3. Le schéma architectural
Il met en évidence la nature et les positions relatives des différentes liaisons élémentaires. Contrairement au schéma technologique, les pièces sans mouvement relatif ne sont pas distinguées les unes des autres.
2.1.4. Le schéma cinématique minimal
Ce mode de représentation met en évidence les mouvements relatifs entre sous-ensembles cinématiques. A la différence du schéma architectural, on ne s’intéresse pas à la réalisation des liaisons mais uniquement aux mobilités. Il fait l’objet de la norme NF EN 23-952
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page8sur30
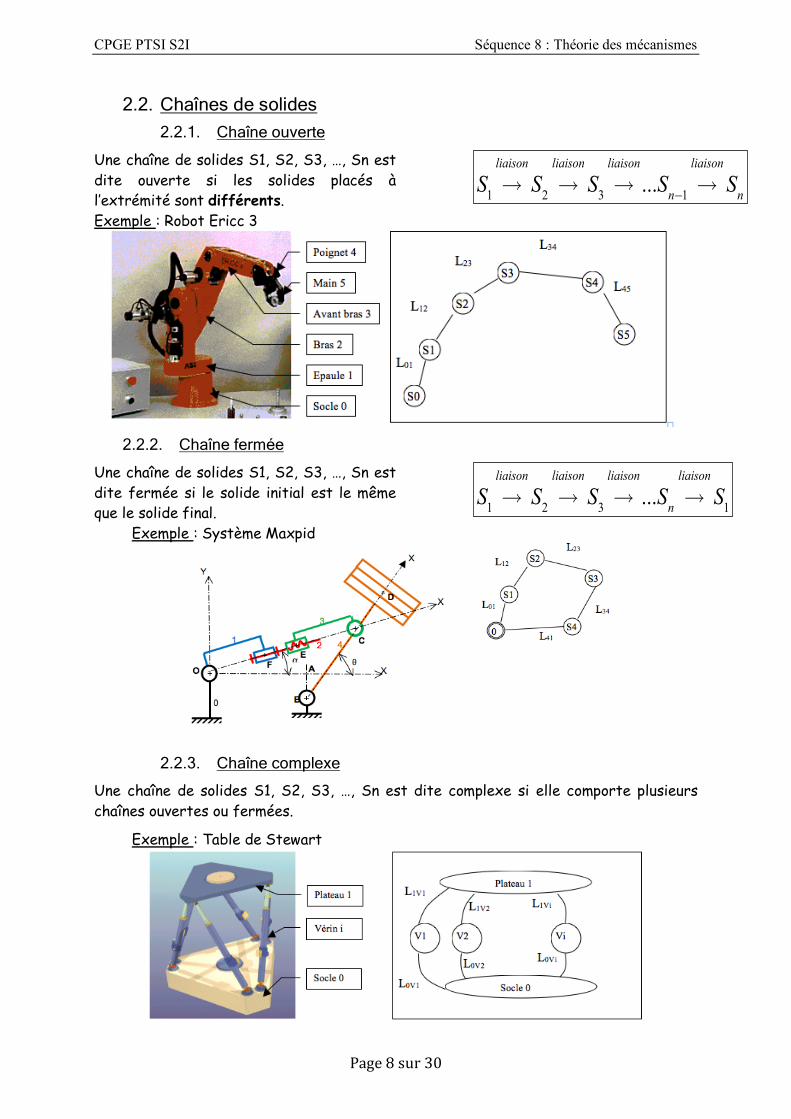
2.2. Chaînes de solides
2.2.1. Chaîne ouverte
Une chaîne de solides S1, S2, S3, …, Sn est dite ouverte si les solides placés à l’extrémité sont différents. Exemple : Robot Ericc 3
2.2.2. Chaîne fermée
Une chaîne de solides S1, S2, S3, …, Sn est dite fermée si le solide initial est le même que le solide final.
Exemple : Système Maxpid
2.2.3. Chaîne complexe
Une chaîne de solides S1, S2, S3, …, Sn est dite complexe si elle comporte plusieurs chaînes ouvertes ou fermées.
Exemple : Table de Stewart
S1 →liaison
S2 →liaison
S3 →liaison
...Sn−1 →liaison
Sn
S1 →liaison
S2 →liaison
S3 →liaison
...Sn →liaison
S1
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page9sur30
2.3. Loi entrée-sorties
2.3.1. Définition
L’analyse du graphe de structure permet de classifier le mécanisme. En fonction de sa nature, différentes méthodes seront envisagées pour étudier sa cinématique.
Une loi « entrée-sortie » est la relation entre les paramètres de situation (position, orientation) de la pièce d'entrée et les paramètres de situation de la pièce de sortie du mécanisme ou de leurs dérivées.
2.3.2. Détermination d’une loi entrée sortie
2.3.2.1. Fermeture géométrique
v FermeturegéométriqueliantlesparamètresdepositionEcrire une relation vectorielle de fermeture de la chaîne.
En projetant cette équation on obtient :
• 3 équations scalaires pour un mécanisme spatial • 2 équations scalaires pour un mécanisme plan
v Fermeturegéométriqueliantlesparamètresd’orientationEcrire une relation entre les angles.
• Pour un mécanisme plan, on obtient une équation scalaire • Pour un mécanisme spatial, écrire une relation particulière entre deux
vecteurs 𝑥$LLLL⃗ . 𝑥JLLLL⃗ = 0(si les deux vecteurs sont orthogonaux)
On obtient 1 équation scalaire qui traduit une valeur d’angle entre deux vecteurs
Remarque : En dérivant ces équations il est possible d’obtenir des relations sur les vitesses
2.3.2.2. Fermeture cinématique
Ecrire la relation de composition des mouvements :
Cette somme de torseur permet d’obtenir :
• 6 équations scalaires pour un mécanisme spatial • 3 équations scalaires pour un mécanisme plan
Remarque : En intégrant ces équations, il est possible d’obtenir des relations sur les positions(ne pas oublier la constante d’intégration à déterminer à partir d’une position particulière)
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page10sur30
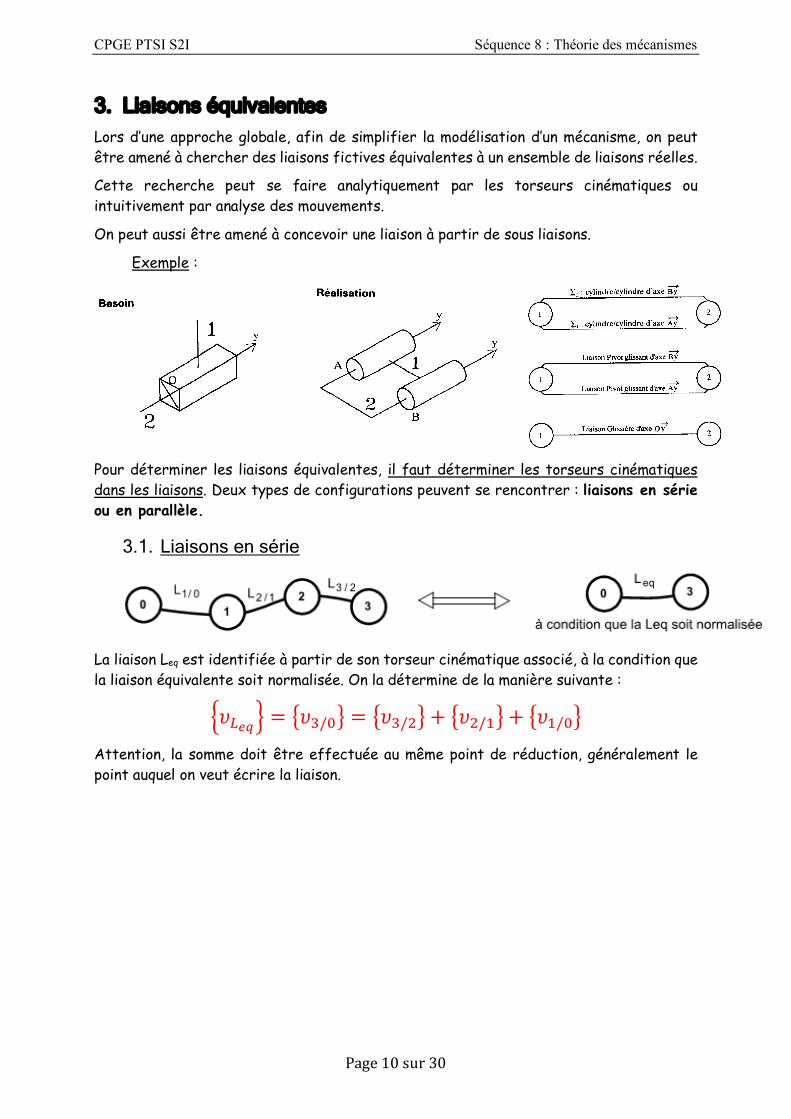
3. Liaisons équivalentes Lors d’une approche globale, afin de simplifier la modélisation d’un mécanisme, on peut être amené à chercher des liaisons fictives équivalentes à un ensemble de liaisons réelles.
Cette recherche peut se faire analytiquement par les torseurs cinématiques ou intuitivement par analyse des mouvements.
On peut aussi être amené à concevoir une liaison à partir de sous liaisons.
Exemple :
Pour déterminer les liaisons équivalentes, il faut déterminer les torseurs cinématiques dans les liaisons. Deux types de configurations peuvent se rencontrer : liaisons en série ou en parallèle.
3.1. Liaisons en série
La liaison Leq est identifiée à partir de son torseur cinématique associé, à la condition que la liaison équivalente soit normalisée. On la détermine de la manière suivante :
N𝜐OPQR = "𝜐S/&' = "𝜐S/J' + "𝜐J/$' + "𝜐$/&'
Attention, la somme doit être effectuée au même point de réduction, généralement le point auquel on veut écrire la liaison.
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page11sur30
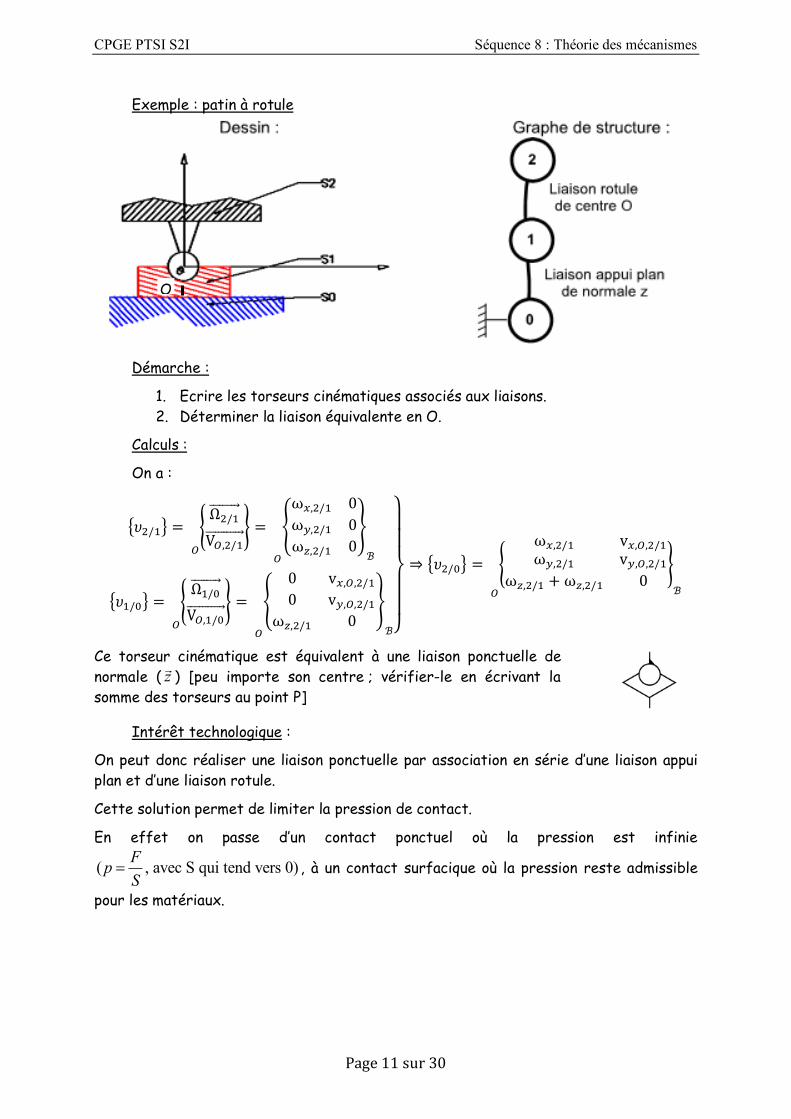
Exemple : patin à rotule
Démarche :
1. Ecrire les torseurs cinématiques associés aux liaisons. 2. Déterminer la liaison équivalente en O.
Calculs :
On a :
"𝜐J/$' = )ΩJ/$LLLLLLLL⃗
VG,J/$LLLLLLLLLLL⃗+
G
= =ω1,J/$ 0ω>,J/$ 0ωF,J/$ 0
C
ℬG
"𝜐$/&' = )Ω$/&LLLLLLLL⃗
VG,$/&LLLLLLLLLLL⃗+
G
= =0 v1,G,J/$0 v>,G,J/$
ωF,J/$ 0C
ℬG ⎭⎪⎪⎬
⎪⎪⎫
⇒ "𝜐J/&' = )ω1,J/$ v1,G,J/$ω>,J/$ v>,G,J/$
ωF,J/$ + ωF,J/$ 0+ℬG
Ce torseur cinématique est équivalent à une liaison ponctuelle de normale ( ) [peu importe son centre ; vérifier-le en écrivant la somme des torseurs au point P]
Intérêt technologique :
On peut donc réaliser une liaison ponctuelle par association en série d’une liaison appui plan et d’une liaison rotule.
Cette solution permet de limiter la pression de contact.
En effet on passe d’un contact ponctuel où la pression est infinie
, à un contact surfacique où la pression reste admissible
pour les matériaux.
z!
( , avec S qui tend vers 0)FpS
=
O
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page12sur30
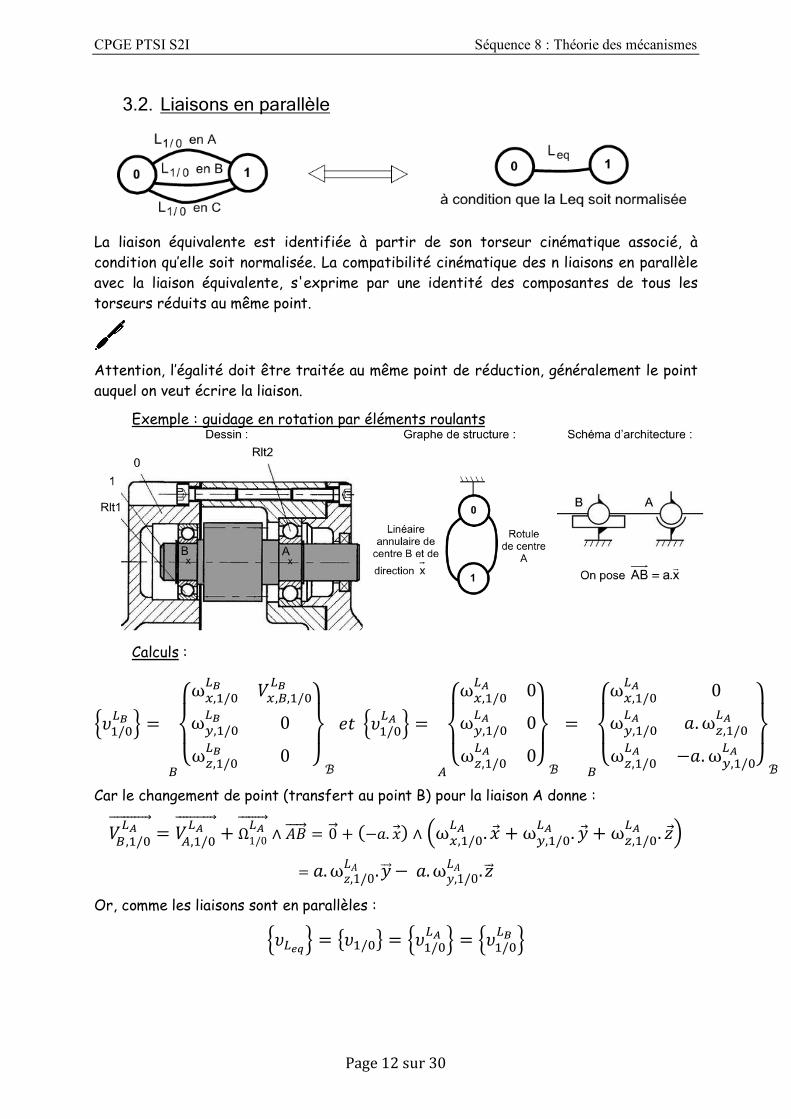
3.2. Liaisons en parallèle
La liaison équivalente est identifiée à partir de son torseur cinématique associé, à condition qu’elle soit normalisée. La compatibilité cinématique des n liaisons en parallèle avec la liaison équivalente, s'exprime par une identité des composantes de tous les torseurs réduits au même point.
Attention, l’égalité doit être traitée au même point de réduction, généralement le point auquel on veut écrire la liaison.
Exemple : guidage en rotation par éléments roulants
Calculs :
N𝜐$/&O\ R =
⎩⎨
⎧ω1,$/&O\ 𝑉1,-,$/&
O\
ω>,$/&O\ 0
ωF,$/&O\ 0 ⎭
⎬
⎫
ℬ-
𝑒𝑡 N𝜐$/&Od R =
⎩⎨
⎧ω1,$/&Od 0
ω>,$/&Od 0
ωF,$/&Od 0⎭
⎬
⎫
ℬ
=
3⎩⎨
⎧ω1,$/&Od 0
ω>,$/&Od 𝑎.ωF,$/&
Od
ωF,$/&Od −𝑎. ω>,$/&
Od ⎭⎬
⎫
ℬ-
Car le changement de point (transfert au point B) pour la liaison A donne :
𝑉-,$/&OdLLLLLLLLLL⃗ = 𝑉3,$/&
OdLLLLLLLLLL⃗ + Ω1/0OdLLLLLLL⃗ ∧ 𝐴𝐵LLLL⃗ = 0L⃗ + (−𝑎. �⃗�) ∧ hω1,$/&
Od . �⃗� + ω>,$/&Od . �⃗� + ωF,$/&
Od . 𝑧i
= 𝑎.ω𝑧,1/0𝐿𝐴 .𝑦LL⃗ − 𝑎.ω𝑦,1/0
𝐿𝐴 .𝑧LL⃗
Or, comme les liaisons sont en parallèles :
N𝜐OPQR = "𝜐$/&' = N𝜐$/&Od R = N𝜐$/&
O\ R

CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page13sur30
Donc N𝜐OPQR = "𝜐$/&' =
⎩⎨
⎧ω1,$/&O\ 𝑉1,-,$/&
O\
ω>,$/&O\ 0
ωF,$/&O\ 0 ⎭
⎬
⎫
ℬ-
=
⎩⎨
⎧ω1,$/&Od 0
ω>,$/&Od 𝑎. ωF,$/&
Od
ωF,$/&Od −𝑎.ω>,$/&
Od ⎭⎬
⎫
ℬ-
On a alors le système :
⎩⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎧ω𝑥,1/0
𝐿𝐵 = ω𝑥,1/0𝐿𝐴
ω𝑦,1/0𝐿𝐵 = ω𝑦,1/0
𝐿𝐴
ω𝑧,1/0𝐿𝐵 = ω𝑧,1/0
𝐿𝐴
𝑉𝑥,𝐵,1/0𝐿𝐵 = 0
0 = 𝑎.ω𝑧,1/0𝐿𝐴
0 = −𝑎.ω𝑦,1/0𝐿𝐴
⇒
⎩⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎧ ω𝑥,1/0
𝐿𝐵 = ω𝑥,1/0𝐿𝐴
ω𝑦,1/0𝐿𝐵 = ω𝑦,1/0
𝐿𝐴 = 0
ω𝑧,1/0𝐿𝐵 = ω𝑧,1/0
𝐿𝐴 = 0
𝑉𝑥,𝐵,1/0𝐿𝐵 = 0
0 = 𝑎.ω𝑧,1/0𝐿𝐴
0 = −𝑎.ω𝑦,1/0𝐿𝐴
⇒ N𝜐𝐿𝑒𝑞R = N𝜐1/0R = =ω𝑥,1/0 00 00 0
C
ℬ𝐵
Torseur cinématique équivalent à une liaison pivot d’axe (𝐵, �⃗�).
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page14sur30
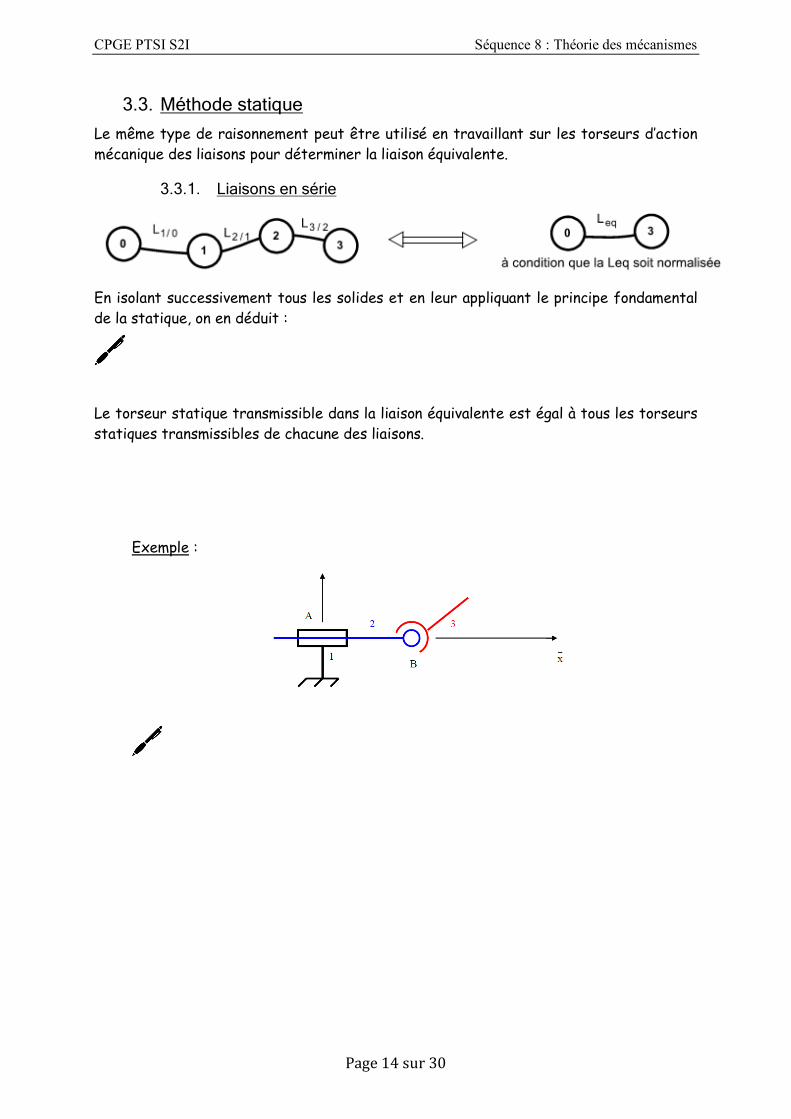
3.3. Méthode statique
Le même type de raisonnement peut être utilisé en travaillant sur les torseurs d’action mécanique des liaisons pour déterminer la liaison équivalente.
3.3.1. Liaisons en série
En isolant successivement tous les solides et en leur appliquant le principe fondamental de la statique, on en déduit :
Le torseur statique transmissible dans la liaison équivalente est égal à tous les torseurs statiques transmissibles de chacune des liaisons.
Exemple :
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page15sur30
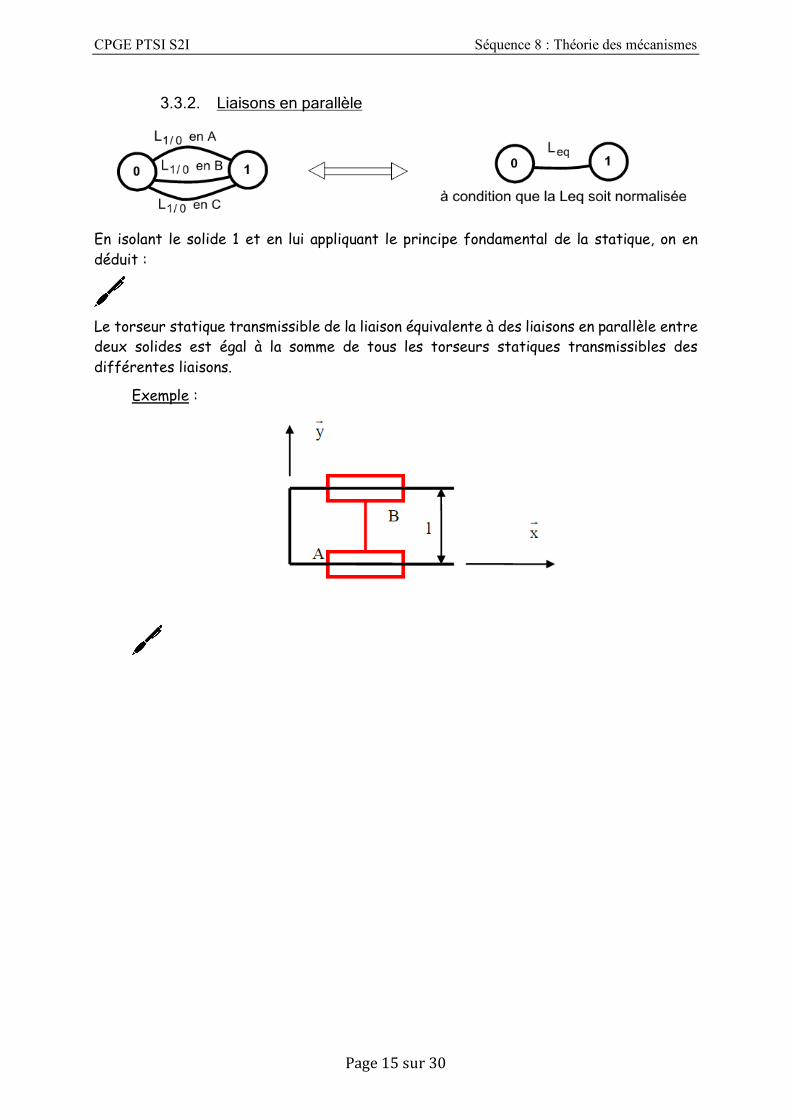
3.3.2. Liaisons en parallèle
En isolant le solide 1 et en lui appliquant le principe fondamental de la statique, on en déduit :
Le torseur statique transmissible de la liaison équivalente à des liaisons en parallèle entre deux solides est égal à la somme de tous les torseurs statiques transmissibles des différentes liaisons.
Exemple :
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page16sur30
4. Modélisation et structure d’une chaîne fermée de solide
4.1. Objectif
L’analyse des mécanismes a toujours pour point de départ un modèle du mécanisme à étudier. Les schémas les plus couramment utilisés dans ce domaine sont les graphes de liaisons et schéma cinématiques. Les résultats de l’analyse dépendent des modèles associés au réel.
Une chaîne fermée de solides est composées de liaisons en série qui forment :
• soit une seule boucle (chaîne simple) • soit plusieurs boucles (chaîne complexe)
Le nombre de chaînes dépend directement du schéma cinématique et donc des modèles adoptés.
Conseils :
ü Généralement, il est préférable de modéliser les liaisons entre chacun des solides de la chaîne sans entrer, lorsque les liaisons sont composées, dans le détail de leur structure. Cela simplifie notablement la suite et évite de faire une analyse globale qui mêle chaîne de solide et liaisons composées.
ü Il vaut mieux, chaque fois que cela est possible, distinguer l’étude de l’iso ou hyperstaticité de la chaîne de solide et celle de l’iso ou hyperstaticité interne des liaisons de la chaîne
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page17sur30
4.2. Le nombre cyclomatique 𝛾
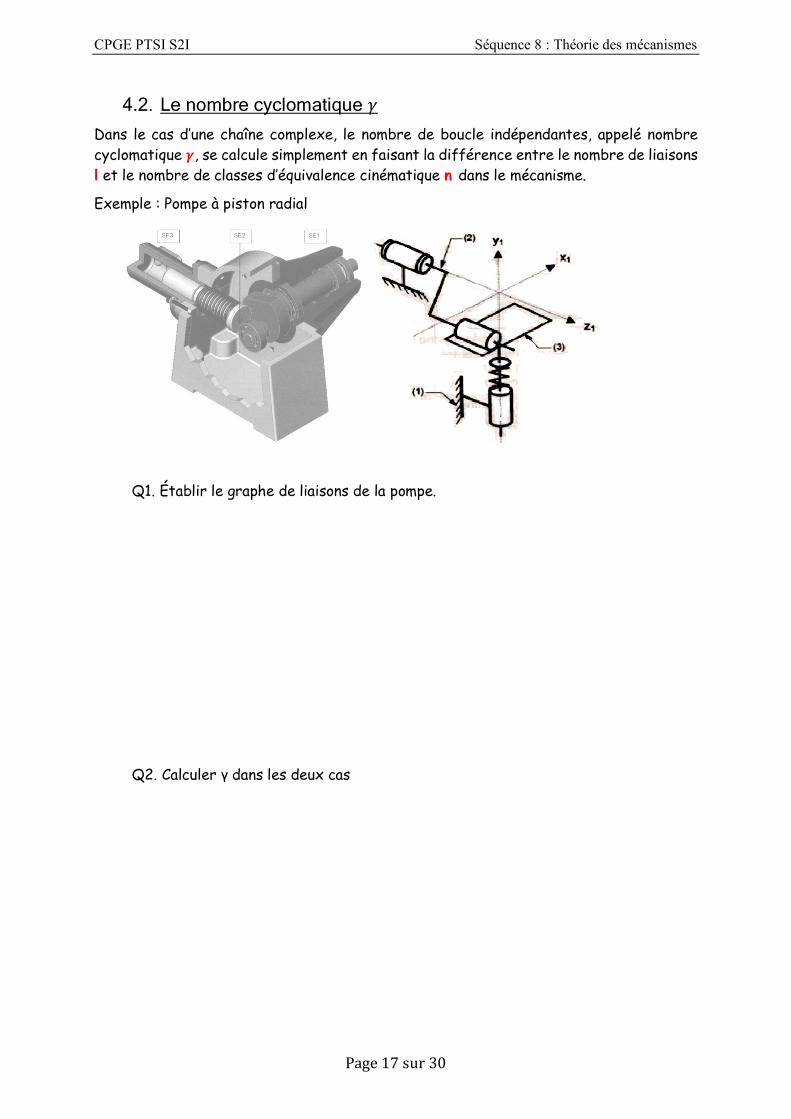
Dans le cas d’une chaîne complexe, le nombre de boucle indépendantes, appelé nombre cyclomatique 𝜸, se calcule simplement en faisant la différence entre le nombre de liaisons l et le nombre de classes d’équivalence cinématique n dans le mécanisme.
Exemple : Pompe à piston radial
Q1. Établir le graphe de liaisons de la pompe.
Q2. Calculer γ dans les deux cas
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page18sur30
5. Approche cinématique de la théorie des mécanismes La loi de composition de mouvement appliquée à chacune des 𝜸chaînes indépendantes du mécanisme permet d’écrire pour chacune :
5.1. Nombre d’équations cinématiques EC
Il y a donc autant d'équations torsorielles indépendantes que de chaînes fermées indépendantes.
Soit EC le nombre d'équations scalaires issues de ces équations de fermeture cinématique :
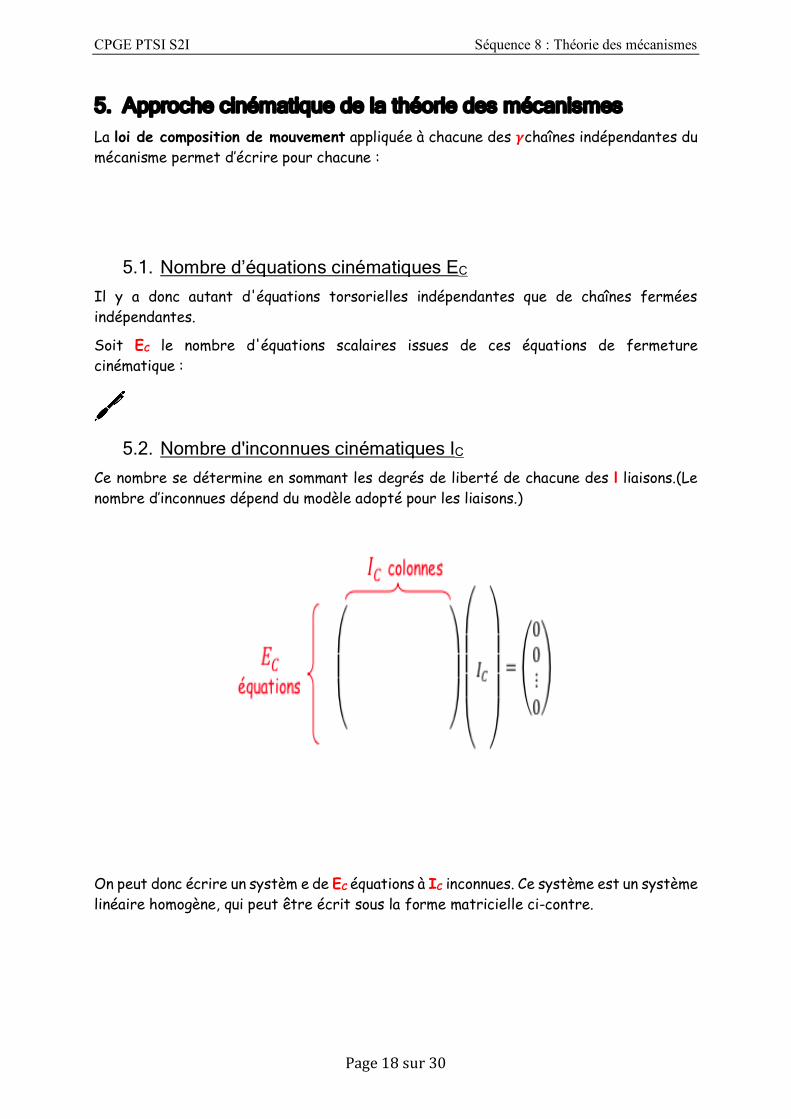
5.2. Nombre d'inconnues cinématiques IC
Ce nombre se détermine en sommant les degrés de liberté de chacune des l liaisons.(Le nombre d’inconnues dépend du modèle adopté pour les liaisons.)
On peut donc écrire un systèm e de EC équations à IC inconnues. Ce système est un système linéaire homogène, qui peut être écrit sous la forme matricielle ci-contre.
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page19sur30
5.3. Mobilité d’un mécanisme m
5.3.1. Signification mathématique
La résolution du système d'équations précédent prend en compte son rang, noté rC.
Le rang désigne le nombre d’équations indépendantes. C’est également le nombre d’équation significative (par exemple une équation 0=0 n’est pas significative).
On définit la mobilité du mécanisme m
Le nombre m est un entier positif ou nul.
5.3.2. Signification mécanique
La mobilité d’un mécanisme est le nombre de paramètres cinématiques indépendants qu’il faut définir pour connaître les mouvements de toutes les pièces du mécanisme, ou le nombre de paramètres de situation nécessaires pour connaître sa configuration.
On appelle mobilité utile, notée mu, le nombre de paramètres cinématiques indépendants qu’il faut définir pour connaître les mouvements des pièces d’entrée et de sortie du mécanisme, ou le nombre de paramètres de situation nécessaires pour connaître la configuration des pièces d’entrées et de sortie du mécanisme.
On appelle mobilité interne, notée mi, le nombre de mouvements indépendants ne faisant intervenir aucun des paramètres d'entrée-sortie.
On a bien évidemment :
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page20sur30
5.3.3. Exemples d’application
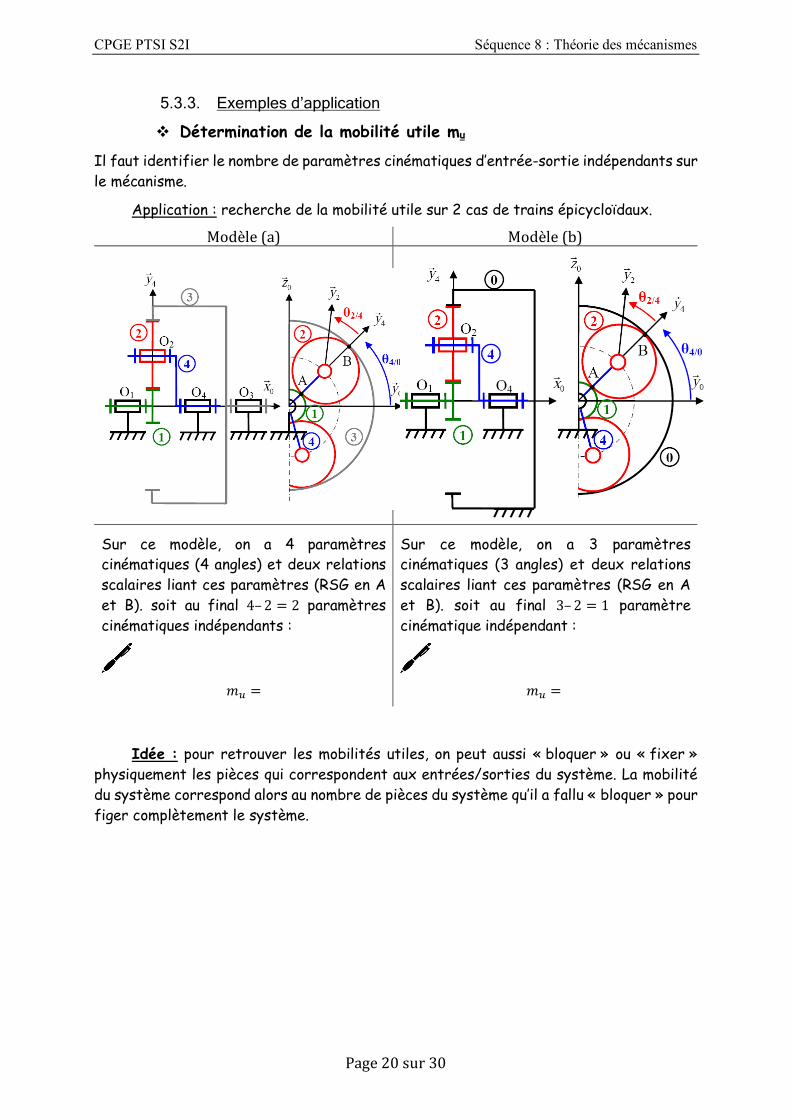
v Détermination de la mobilité utile mu
Il faut identifier le nombre de paramètres cinématiques d’entrée-sortie indépendants sur le mécanisme.
Application : recherche de la mobilité utile sur 2 cas de trains épicycloïdaux.
Modèle(a) Modèle(b)
Sur ce modèle, on a 4 paramètres cinématiques (4 angles) et deux relations scalaires liant ces paramètres (RSG en A et B). soit au final 4–2 = 2 paramètres cinématiques indépendants :
𝑚p =
Sur ce modèle, on a 3 paramètres cinématiques (3 angles) et deux relations scalaires liant ces paramètres (RSG en A et B). soit au final 3–2 = 1 paramètre cinématique indépendant :
𝑚p =
Idée : pour retrouver les mobilités utiles, on peut aussi « bloquer » ou « fixer » physiquement les pièces qui correspondent aux entrées/sorties du système. La mobilité du système correspond alors au nombre de pièces du système qu’il a fallu « bloquer » pour figer complètement le système.
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page21sur30
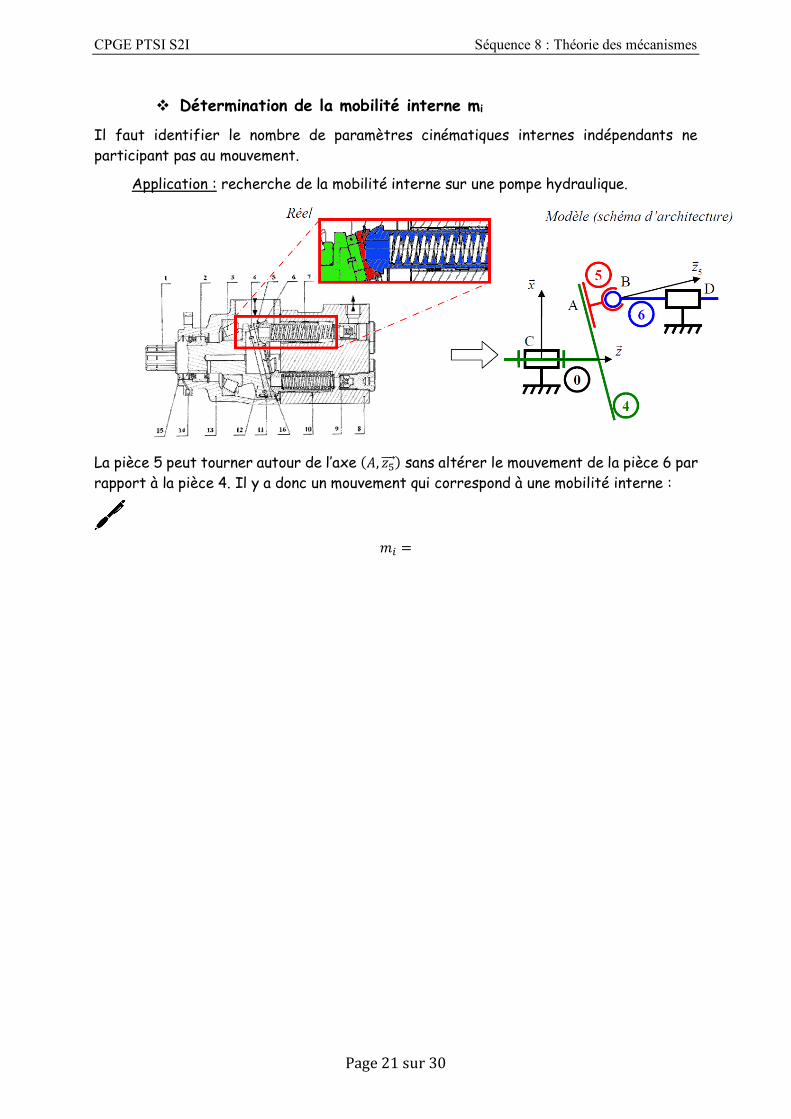
v Détermination de la mobilité interne mi
Il faut identifier le nombre de paramètres cinématiques internes indépendants ne participant pas au mouvement.
Application : recherche de la mobilité interne sur une pompe hydraulique.
La pièce 5 peut tourner autour de l’axe (𝐴, 𝑧rLLL⃗ ) sans altérer le mouvement de la pièce 6 par rapport à la pièce 4. Il y a donc un mouvement qui correspond à une mobilité interne :
𝑚s =
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page22sur30
5.4. Degré d'hyperstaticité h
Ce nombre est appelé degré d'hyperstaticité du mécanisme. Il s’agit d’un entier positif ou nul.
Mathématiquement, il exprime le nombre d'équations ne servant pas à la résolution. (Le plus souvent de la forme 0 = 0, ou combinaison linéaire d’autres équations du système).
Mécaniquement, il définit le nombre de degrés de liberté à ajouter pour garantir un montage et un fonctionnement sans contrainte du mécanisme.
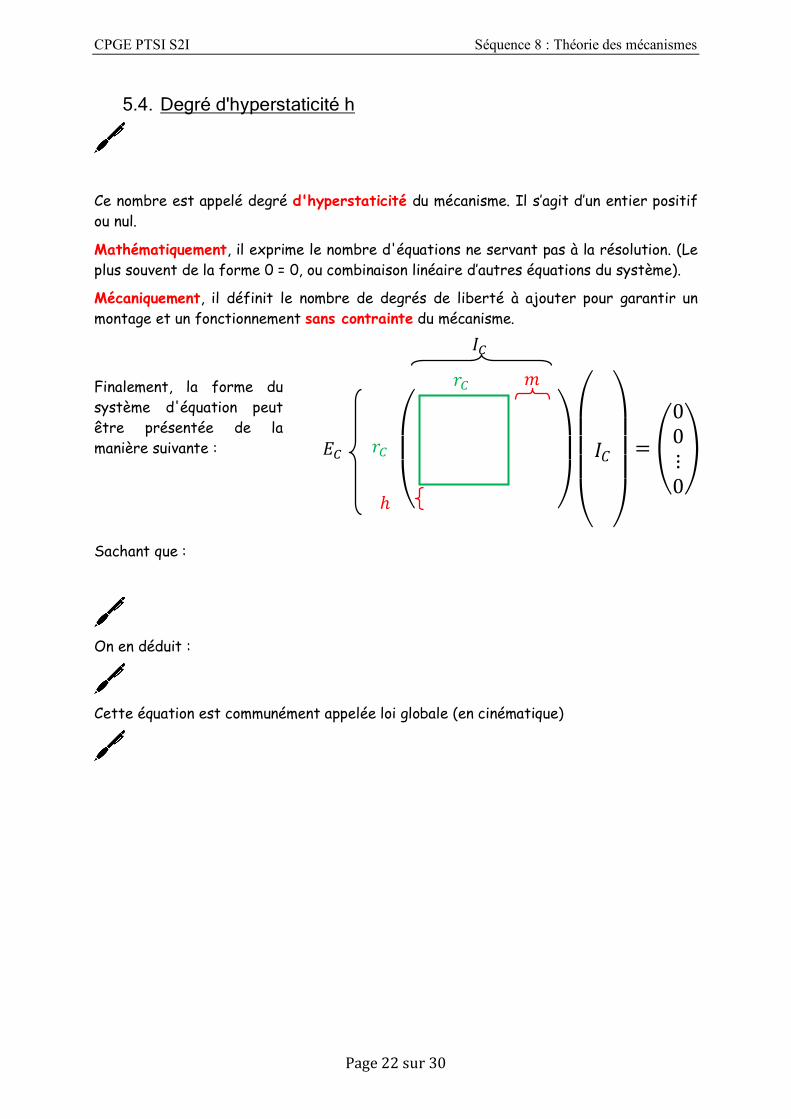
Finalement, la forme du système d'équation peut être présentée de la manière suivante :
Sachant que :
On en déduit :
Cette équation est communément appelée loi globale (en cinématique)
⎝
⎜⎛
⎠
⎟⎞
⎝
⎜⎜⎜⎛
𝐼𝐶
⎠
⎟⎟⎟⎞
= *
00⋮0
-
ℎ
𝑚
𝑟:
𝑟:
𝐼:
𝐸:

CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page23sur30
Exemple : Pompe à piston radial
Q.3 Calculer h et m en utilisant la méthode cinématique.
a) Écrire les torseurs cinématiques de chacune des liaisons.
b) Écrire les 6 équations provenant de la fermeture de la chaine cinématique en O1
c) En déduire la mobilité et le degré d’hyperstatisme du système
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page24sur30
6. Approche statique de la théorie des mécanismes Ce paragraphe détaille une seconde approche de la théorie des mécanismes qui conduit au même résultat que précédemment. Dans ce cours, l’approche est menée en statique, elle se généralise très simplement à la dynamique.
6.1. Nombre d'équations statiques ES
Une étude statique systématique est menée en étudiant le mouvement ou l'équilibre de chacune des pièces du mécanisme.
Le mouvement ou l'équilibre étant nécessairement relatif à une de ces pièces, prise comme référentiel, on dénombre alors n-1 solides à étudier. (En général, le « -1 » correspond au bâti qui est considéré comme un référentiel galiléen et comme solide de référence pour la dynamique ou l’équilibre, on ne peut donc pas l’isoler).
Soit ES le nombre d'équations scalaires obtenues après une étude exhaustive :
6.2. Nombre d'inconnues statiques IS
Soit IS le nombre d'inconnues d'actions mécaniques transmissibles par les liaisons du problème.
Ce nombre se détermine en sommant les nombres de paramètres d'actions mécaniques transmissibles par chacune des l liaisons.
Encore une fois, le nombre d'inconnues dépend de la nature des modèles adoptés pour les liaisons.
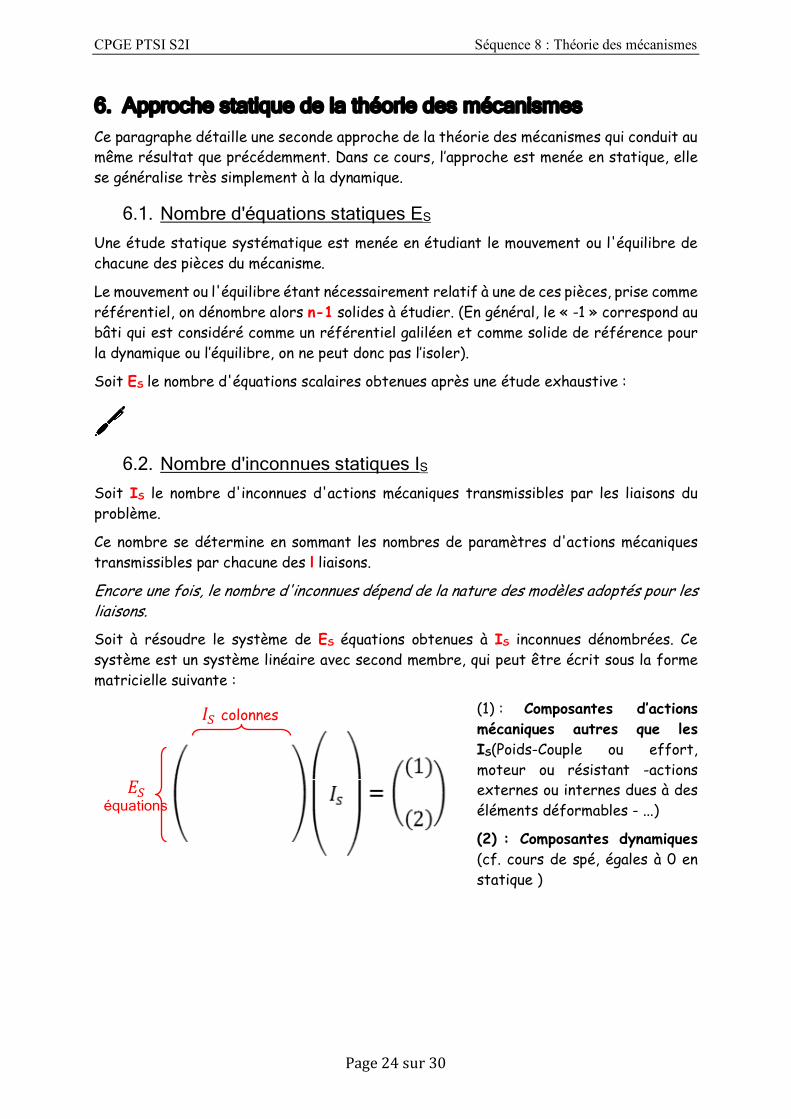
Soit à résoudre le système de ES équations obtenues à IS inconnues dénombrées. Ce système est un système linéaire avec second membre, qui peut être écrit sous la forme matricielle suivante :
(1) : Composantes d’actions mécaniques autres que les IS(Poids-Couple ou effort, moteur ou résistant -actions externes ou internes dues à des éléments déformables - ...)
(2) : Composantes dynamiques (cf. cours de spé, égales à 0 en statique )
𝐼x colonnes
𝐸x équations
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page25sur30
6.3. Degré d'hyperstaticité h
La résolution du système d'équations précédent prend en compte son rang, noté rS (nombre d’équations linéairement indépendantes).
• Un mécanisme est dit isostatique si, en l'absence d'actions mécaniques extérieures, toutes les inconnues d'actions mécaniques transmissibles par les liaisons sont nulles.
• Un mécanisme est dit hyperstatique si, en l'absence d'actions mécaniques extérieures, il existe des inconnues non nulles d'actions mécaniques transmissibles par les liaisons, dans les faits indéterminées.
Mathématiquement, On définit le degré d'hyperstaticité h par
Le nombre définissant le degré d'hyperstaticité est un entier naturel, 𝒉 ≥ 𝟎 .
Mécaniquement, Le degré d'hyperstaticité h représente le nombre d'inconnues ne pouvant pas être déterminées à l’aide de la statique ou de la dynamique.
6.4. Mobilité d’un mécanisme m
Soit le nombre m défini (mathématiquement, pour la statique) par :
Ce nombre est la mobilité du mécanisme. C’est un entier positif ou nul. Il exprime le nombre d'équations ne servant pas à la résolution. (le plus souvent de la forme 0 = 0 pour l'équation homogène associée).
Mécaniquement, en statique et cinématique, la mobilité est définie de même façon.

CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page26sur30
Finalement, la forme du système d'équation peut être présentée de la manière suivante :
On a donc les deux relations :
𝑚 = 𝐸x − 𝑟x ℎ = 𝐼x − 𝑟x On en tire alors :
Cette équation est communément appelée loi globale (en statique)
• Remarque 1 : Lorsque h = 0 le mécanisme est dit isostatique. On parle d'isostatisme lorsque le fonctionnement se fait sans contrainte excessive ou pour être plus rigoureux si le principe fondamental de la dynamique suffit à déterminer toutes les inconnues de liaisons du mécanisme. Ainsi, la mobilité d'une pièce d'un assemblage est nécessairement limitée ; certains degrés de mobilité sont supprimés, mais chaque degré de mobilité n'est supprimé qu'une seule fois.
• Remarque 2 : Lorsque h = n, il est dit hyperstatique d’ordre n. On parle d’hyperstatisme si la situation d'un assemblage pour lequel le fonctionnement se fait avec plus de contraintes que ce qui est strictement nécessaire pour le maintenir, ce qui signifie qu'au moins un degré de mobilité d'une pièce est supprimé plusieurs fois.
• Remarque 3 : Lorsque h <0, le mécanisme est dit hypostatique. On parle également d'hypostatisme lorsque l'assemblage possède trop de mobilités. D'un point de vue mécanique, au moins une pièce conserve au moins une possibilité de mouvement (au moins un degré de mobilité) qui est nuisible au fonctionnement. Si c'est un mécanisme, il va présenter des instabilités, des mouvements parasites ; si c'est une charpente, elle ne tiendra pas.
𝑚
ℎ
𝑟x
𝑟x
𝐼x
𝐸x
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page27sur30
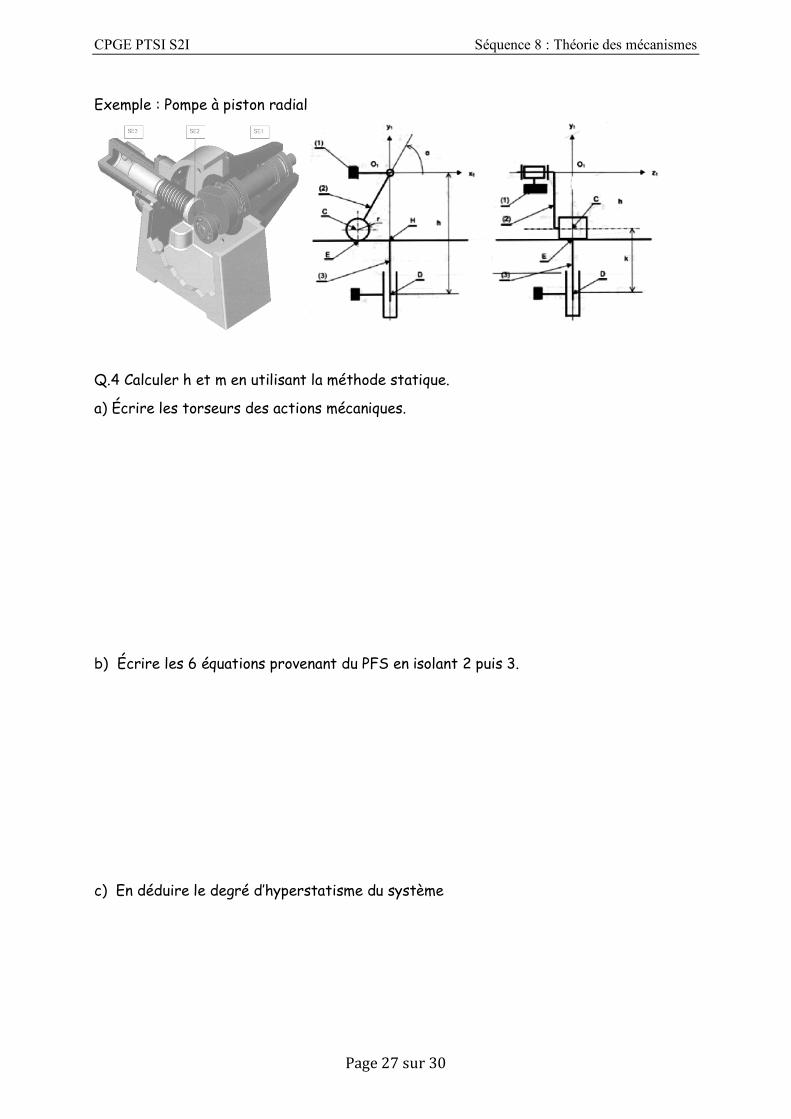
Exemple : Pompe à piston radial
Q.4 Calculer h et m en utilisant la méthode statique.
a) Écrire les torseurs des actions mécaniques.
b) Écrire les 6 équations provenant du PFS en isolant 2 puis 3.
c) En déduire le degré d’hyperstatisme du système
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page28sur30
7. Mise en évidence géométrique de l’hyperstaticité A une inconnue hyperstatique correspond un défaut géométrique à minimiser.
On montrera en RDM (résistance des matériaux cf cours de spé) que :
ü Les défauts du type déplacement𝛿1, 𝛿> et 𝛿Fengendrent (les efforts sont en élasticité linéaire proportionnels aux défauts) des inconnues du types efforts selon X, Y, et Z.
ü Les défauts du type rotation 𝜃1, 𝜃>et 𝜃F engendrent des inconnues du type moment.
Les défauts engendrent des actions de liaisons même si le torseur des actions mécaniques extérieures sur le système est nul.
Le mécanisme est dit auto-contraint par les défauts et ceci dès le montage.
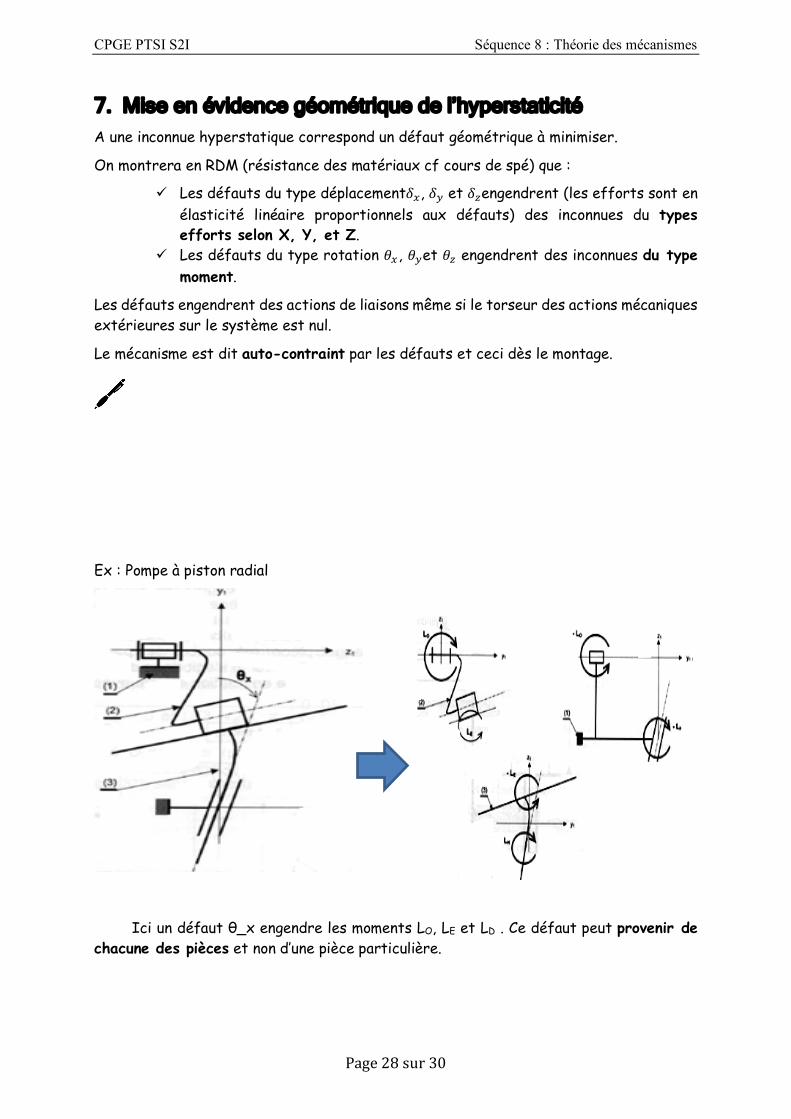
Ex : Pompe à piston radial
Ici un défaut θ_x engendre les moments LO, LE et LD . Ce défaut peut provenir de chacune des pièces et non d’une pièce particulière.
CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page29sur30
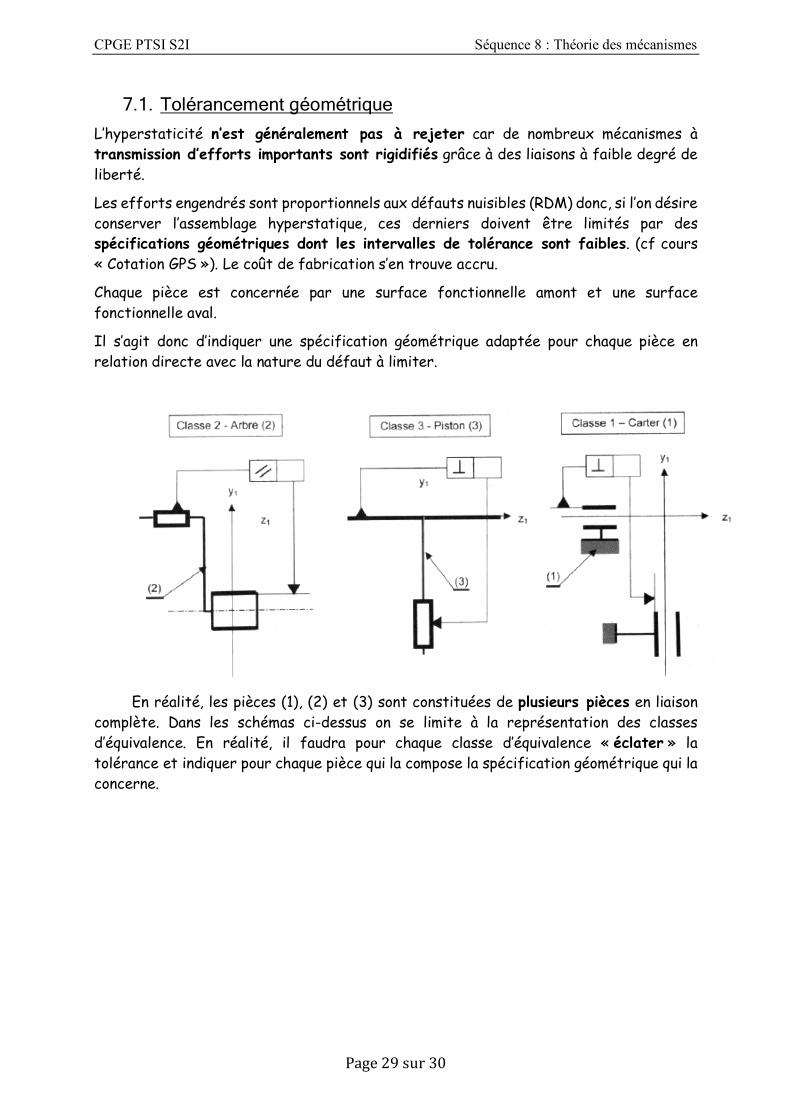
7.1. Tolérancement géométrique
L’hyperstaticité n’est généralement pas à rejeter car de nombreux mécanismes à transmission d’efforts importants sont rigidifiés grâce à des liaisons à faible degré de liberté.
Les efforts engendrés sont proportionnels aux défauts nuisibles (RDM) donc, si l’on désire conserver l’assemblage hyperstatique, ces derniers doivent être limités par des spécifications géométriques dont les intervalles de tolérance sont faibles. (cf cours « Cotation GPS »). Le coût de fabrication s’en trouve accru.
Chaque pièce est concernée par une surface fonctionnelle amont et une surface fonctionnelle aval.
Il s’agit donc d’indiquer une spécification géométrique adaptée pour chaque pièce en relation directe avec la nature du défaut à limiter.
En réalité, les pièces (1), (2) et (3) sont constituées de plusieurs pièces en liaison
complète. Dans les schémas ci-dessus on se limite à la représentation des classes d’équivalence. En réalité, il faudra pour chaque classe d’équivalence « éclater » la tolérance et indiquer pour chaque pièce qui la compose la spécification géométrique qui la concerne.

CPGE PTSI S2I Séquence 8 : Théorie des mécanismes
Page30sur30
7.2. Rendre l’assemblage isostatique
Pour rendre l’assemblage isostatique, il suffit d’annuler l’une des inconnues de la ou des inconnues hyperstatiques.
Ceci s’effectue en ajoutant un ou plusieurs degrés de liberté à l’une ou l’autre des liaisons de la chaîne.
Ici la famille des inconnues hyperstatiques est celle des Li, les défauts géométriques correspondants sont θ_x du type rotation à l’une des liaisons.
La liaison modifiable est L_(2-3), les deux autres ayant des fonctions qui ne permettent pas d’ajout de degré de liberté : Linéaire rectiligne en linéaire rectiligne + rotule.
8. Quelle approche privilégier ? Toute étude commence par une approche globale.
En effet, il est inutile de se lancer dans des calculs qui deviennent très rapidement complexes pour déboucher sur des conclusions triviales. Par ailleurs, il n'est pas inutile d'avoir une idée préliminaire de ce vers quoi on tend.
Pour une recherche de mobilité et de degré d'hyperstaticité, l'approche cinématique est souvent plus commode, et ce pour deux raisons :
ü Les grandeurs manipulées sont observables et mesurables. ü Le nombre d'équations à manipuler est en général bien inférieur à celui
obtenu par l'approche dynamique.
Pour une recherche de la loi entrée-sortie d'un point de vue dynamique, l'approche énergétique est à privilégier. Le théorème de l'énergie cinétique donne un résultat immédiat (cf cours de spé).
L'approche dynamique enfin est à mener lorsque l'on cherche à dimensionner les composants d'un mécanisme. Il est alors seulement nécessaire de connaître les torseurs d'actions mécaniques transmissibles par les liaisons. (cf cours de spé)


















