technores1 (2)
29
République Algérienne Démocratique et Populaire Ministère de l’Enseignement Supérieur et de la recherche scientifique Université des sciences et de la Technologie Houari Boumediene Faculté d’électronique et d’informatique Licence 3 : GTR Exposé sur : Travail réalisé par : - Meldjem Sara 201100002799 - Khalfi Chahinez 201100001304 - Merabtine Nour-Houda 201100006688 - Hadj Rabah Karima 201100001803 2013 - 2014 Les réseaux de capteurs
Transcript of technores1 (2)
République Algérienne Démocratique et Populaire Ministère de l’Enseignement Supérieur et de la recherche scientifique
Université des sciences et de la Technologie Houari Boumediene
Faculté d’électronique et d’informatique
Licence 3 : GTR
Exposé sur :
Travail réalisé par :
- Meldjem Sara 201100002799
- Khalfi Chahinez 201100001304
- Merabtine Nour-Houda 201100006688
- Hadj Rabah Karima 201100001803
2013 - 2014
Les réseaux de capteurs
2
TABLE DES MATIÈRES
Introduction générale ………………………...4
Chapitre 1. Généralités sur les réseaux de capteurs
I. Introduction………………………………………6
II. Architecture et composants d’un capteur Sans fil..7 III. Architecture d’un réseau de capteurs sans fils.………...8
IV. Applications des réseaux de capteurs………………….9
V. Caractéristiques des RCSF…………………………….10
VI. Contraintes de conception des RCSF.………………..14
VII. Conclusion……………………………………….16
Chapitre 2. Les protocoles de routage
I. Introduction..........................................................18
II. Les différents protocoles de routage …………...18
1. Inondation………………………………………18
2. Gossiping……………………………………….18
3. SPIN…………………………………………….20
4. DD………………………………………………20
5. GAF……………………………………………..20
6. LEACH…………………………………………21
7. PEGASIS……………………………………….21
III. Les principales classes des protocoles de routage :….22
1. Le routage plat………………………………….22
2. Le routage hiérarchique………………………...23
3. Le routage géographique……………………….23
IV. Conclusion……………………………………...24
3
Chapitre 3. Le protocole LEACH
I. Introduction…………………………………….26
II. Description de l’algorithme LEACH ………….26
III. La durée de vie du réseau …………………………..27
IV. Conclusion……………………………………..28
Conclusion générale……………………………….29
4
Introduction générale
Les progrès réalisés lors de ces dernières décennies dans les domaines de la
microélectronique, de la micromécanique, et des technologies de communication sans fil,
ont permis de produire avec un coût raisonnable des composants de quelques millimètres
cubes de volume. Ces derniers, appelés micro-capteurs, intègrent : une unité de captage
chargée de capter des grandeurs physiques (chaleur, humidité, vibrations) et de les
transformer en grandeurs numériques, une unité de traitement informatique et de stockage
de données et un module de transmission sans fil. Un grand nombre de ces dispositifs
(micro-capteurs) sont déployés dans la nature afin de créer un réseau de capteurs à des fins
aussi bien de contrôle. Le fort potentiel d’applications des réseaux de capteurs en font un
domaine de recherche très actif.
Un micro-capteur est muni d'une ressource énergétique (généralement une batterie) pour
alimenter tous ses composants. Cependant, en raison de sa taille réduite, la ressource
énergétique dont il dispose est limitée et généralement irremplaçable. Dès lors, l’énergie est
la ressource la plus précieuse dans un réseau de capteurs, puisque elle influe directement sur
la durée de vie des micros capteurs, voire du réseau en entier, étant donnée que le routage de
donnée est un facteur déterminant dans la gestion économique d’énergie plusieurs recherche
on était effectuée afin de proposer des stratégies de routages dont certaines sont des
adaptations de stratégies qui existaient pour d'autres types de réseaux (réseau ad hoc) tandis
que d'autres ont été conçues spécialement pour les réseaux de capteurs sans fil. L’objectif de
notre projet est d’étudier les caractéristiques des réseaux de capteurs, repérer leurs
inconvénients et leurs avantages et enfin énumérer les différents protocoles de routages
utilisés afin d’étudier un des protocoles en détail.
Le projet sera organisé comme suit : En premier lieu, on introduira quelques généralités
sur les réseaux de capteurs sans fil. Ensuite, on présentera les protocoles de routage dans les
RCSFs ainsi que leurs classements. Par la suite on détaillera un des protocoles utilisés.
Enfin, On terminera avec une conclusion générale.
5
6
I. Introduction
Les réseaux de capteurs sans fil (RCSFs ou WSNs : Wireless sensor networks en
anglais) sont devenus de plus en plus omniprésents. Les milieux scientifiques et industriels
leurs prêtent de en plus d'attention du fait de leurs riches applications dans les domaines :
médical, commercial et militaire. Selon MIT’s Technology Review, il s’agit de l’une des dix
nouvelles technologies qui vont influer sur notre manière de vivre et de travailler. Les
RCSFs sont des réseaux de nœuds sans fil dédiés à des applications spécifiques. Ils sont
considérés comme un type particulier des réseaux Ad-hoc, dans lesquels les nœuds sont des
capteurs intelligents (smart sensors). Les RCSFs sont composés d’un nombre
potentiellement très grand (plusieurs milliers) de capteurs qui se communiquent selon un
modèle de communication « sources multiples - destination unique », déployés dans la zone
à couvrir.
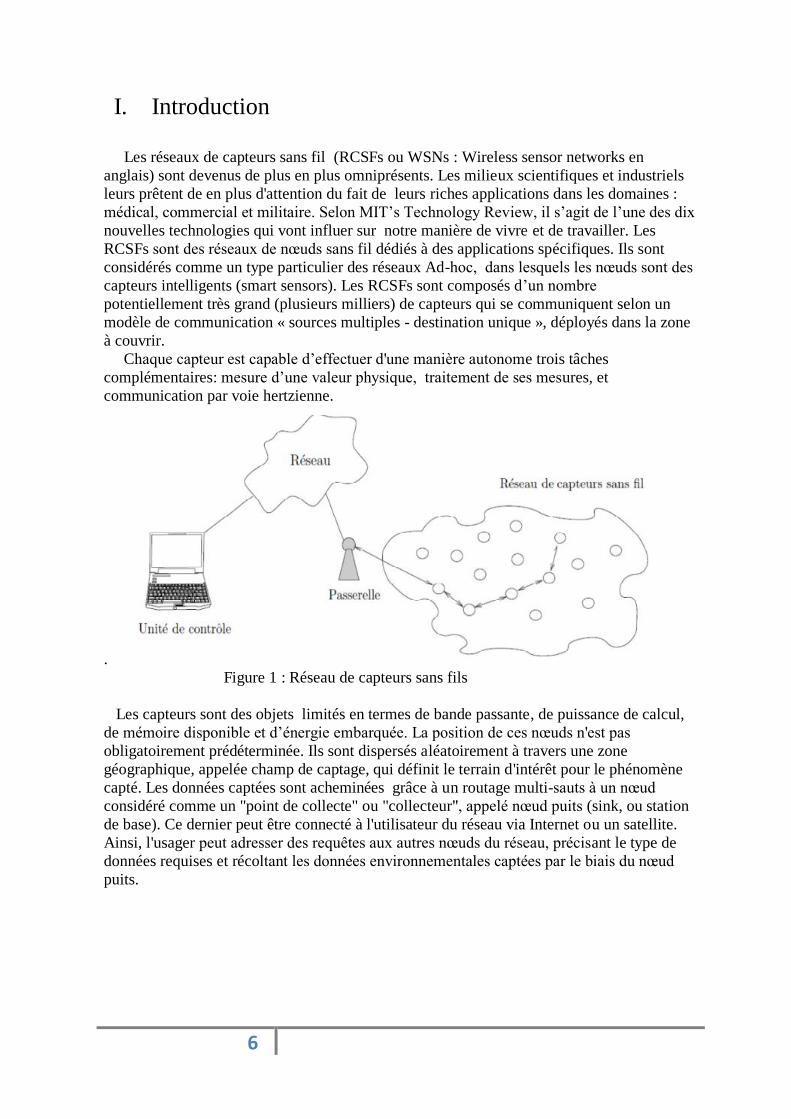
Chaque capteur est capable d’effectuer d'une manière autonome trois tâches
complémentaires: mesure d’une valeur physique, traitement de ses mesures, et
communication par voie hertzienne.
.
Figure 1 : Réseau de capteurs sans fils
Les capteurs sont des objets limités en termes de bande passante, de puissance de calcul,
de mémoire disponible et d’énergie embarquée. La position de ces nœuds n'est pas
obligatoirement prédéterminée. Ils sont dispersés aléatoirement à travers une zone
géographique, appelée champ de captage, qui définit le terrain d'intérêt pour le phénomène
capté. Les données captées sont acheminées grâce à un routage multi-sauts à un nœud
considéré comme un "point de collecte" ou "collecteur", appelé nœud puits (sink, ou station
de base). Ce dernier peut être connecté à l'utilisateur du réseau via Internet ou un satellite.
Ainsi, l'usager peut adresser des requêtes aux autres nœuds du réseau, précisant le type de
données requises et récoltant les données environnementales captées par le biais du nœud
puits.
7
Figure 2 : Exemple de capteurs sans fils
Les réseaux de capteurs sans fil sont typiquement employés dans les environnements
fortement dynamiques et hostiles sans existence humaine (à la différence des réseaux
informatiques conventionnels), et donc, ils doivent être tolérants à l'échec (avec une
participation humaine minime) et à la perte de connectivité.
II. Architecture et composants d’un capteur Sans fil
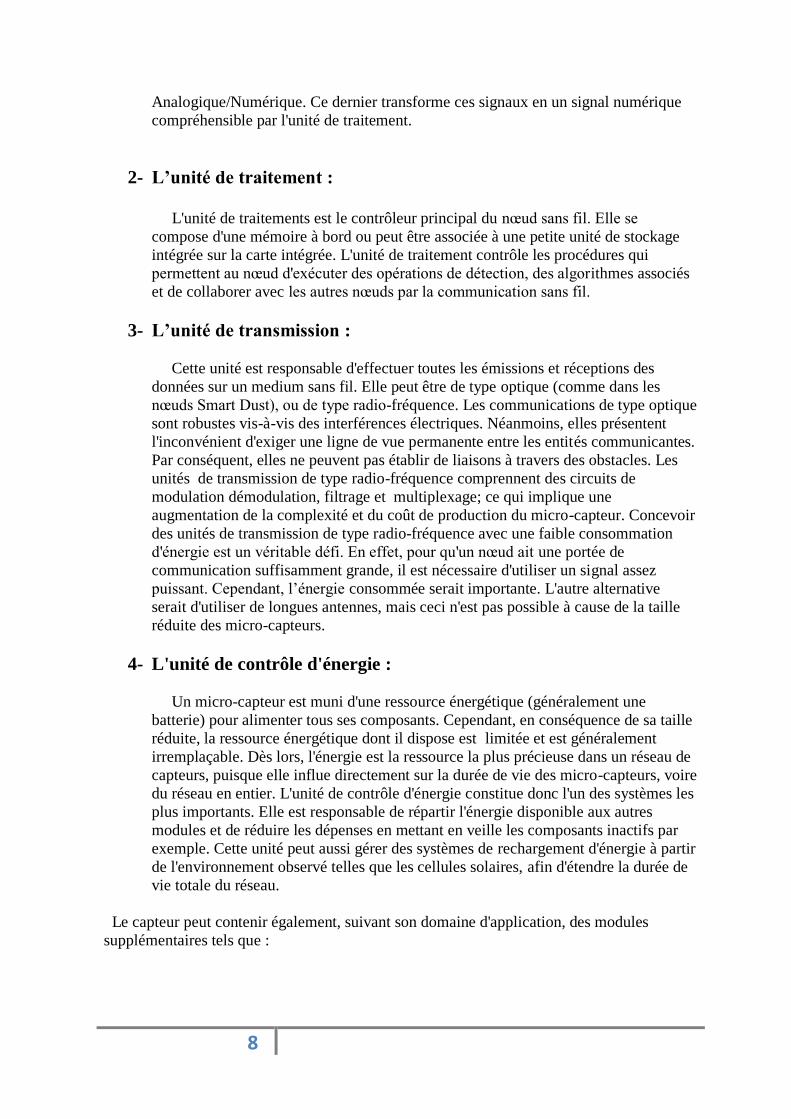
L’architecture générale présentée dans la littérature est schématisée sur la figure (figure
3). L’architecture comprend quatre éléments de base pour le fonctionnement du capteur: une
unité de captage, une unité de traitement, une unité d’émission/réception et une unité de
puissance; néanmoins, d’autres éléments optionnels peuvent être intégrés pour certaines
applications spécifiques, à savoir: un système de localisation géographique, un régénérateur
d’énergie et un mobilisateur. Chacun de ces éléments sera détaillé dans ce qui suit:
Figure 3 : Architecture d’un capteur sans fils
1- L’unité de captage :
C’est le composant principal d'un nœud sans fil qui se distingue de tout autre
système embarqué avec ces capacités de communication. L'unité de captage peut
inclure généralement plusieurs sondes, qui fournissent des informations collectées du
monde physique. Chaque unité est responsable de collecter les informations d'un
certain type, tel que la température, l’humidité, ou la lumière. Cette unité est
généralement composée de deux sous-unités : le capteur lui-même et un
convertisseur Analogique/Numérique. Le capteur est responsable de fournir des
signaux analogiques, basés sur le phénomène observé, au convertisseur
8
Analogique/Numérique. Ce dernier transforme ces signaux en un signal numérique
compréhensible par l'unité de traitement.
2- L’unité de traitement :
L'unité de traitements est le contrôleur principal du nœud sans fil. Elle se
compose d'une mémoire à bord ou peut être associée à une petite unité de stockage
intégrée sur la carte intégrée. L'unité de traitement contrôle les procédures qui
permettent au nœud d'exécuter des opérations de détection, des algorithmes associés
et de collaborer avec les autres nœuds par la communication sans fil.
3- L’unité de transmission :
Cette unité est responsable d'effectuer toutes les émissions et réceptions des
données sur un medium sans fil. Elle peut être de type optique (comme dans les
nœuds Smart Dust), ou de type radio-fréquence. Les communications de type optique
sont robustes vis-à-vis des interférences électriques. Néanmoins, elles présentent
l'inconvénient d'exiger une ligne de vue permanente entre les entités communicantes.
Par conséquent, elles ne peuvent pas établir de liaisons à travers des obstacles. Les
unités de transmission de type radio-fréquence comprennent des circuits de
modulation démodulation, filtrage et multiplexage; ce qui implique une
augmentation de la complexité et du coût de production du micro-capteur. Concevoir
des unités de transmission de type radio-fréquence avec une faible consommation
d'énergie est un véritable défi. En effet, pour qu'un nœud ait une portée de
communication suffisamment grande, il est nécessaire d'utiliser un signal assez
puissant. Cependant, l’énergie consommée serait importante. L'autre alternative
serait d'utiliser de longues antennes, mais ceci n'est pas possible à cause de la taille
réduite des micro-capteurs.
4- L'unité de contrôle d'énergie :
Un micro-capteur est muni d'une ressource énergétique (généralement une
batterie) pour alimenter tous ses composants. Cependant, en conséquence de sa taille
réduite, la ressource énergétique dont il dispose est limitée et est généralement
irremplaçable. Dès lors, l'énergie est la ressource la plus précieuse dans un réseau de
capteurs, puisque elle influe directement sur la durée de vie des micro-capteurs, voire
du réseau en entier. L'unité de contrôle d'énergie constitue donc l'un des systèmes les
plus importants. Elle est responsable de répartir l'énergie disponible aux autres
modules et de réduire les dépenses en mettant en veille les composants inactifs par
exemple. Cette unité peut aussi gérer des systèmes de rechargement d'énergie à partir
de l'environnement observé telles que les cellules solaires, afin d'étendre la durée de
vie totale du réseau.
Le capteur peut contenir également, suivant son domaine d'application, des modules
supplémentaires tels que :

9
- Le système de localisation géographique:
Dans plusieurs applications, les tâches de détection et les techniques de routage
ont besoin de connaitre la localisation géographique d'un nœud. Ainsi, il est commun
pour qu'un nœud soit équipé d'un système de localisation géographique. Ce système
peut se composer d'un module de GPS pour un nœud de haut niveau ou bien d'un
module de software qui implémente des algorithmes de localisation qui fournissent
les informations sur l'emplacement du nœud par des calculs distribués.
- Le mobilisateur:
Un mobilisateur peut parfois être nécessaire pour déplacer un nœud pour
accomplir ses tâches. Le support de mobilité exige des ressources énergétiques
étendues qui devraient être fourni efficacement. Le mobilisateur peut, également,
opérer dans l'interaction étroite avec l'unité de détection et le processeur pour
contrôler les mouvements du nœud.
- Le régénérateur de l’énergie:
Tandis que l'alimentation par batterie, est la plupart du temps, utilisée dans les
nœuds, un générateur électrique supplémentaire peut être utilisé pour des
applications où une plus longue vie de réseau est essentielle. Pour des applications
extérieures, des piles solaires sont utilisées pour générer l'alimentation électrique. De
même, des techniques de récupération d'énergie pour l'énergie thermique ou
cinétique peuvent également être utilisées.
III. Architecture d’un réseau de capteurs sans fils
Tous les capteurs respectent globalement la même architecture basée sur un noyau central
autour duquel s’articulent les différentes interfaces d’entrée-sortie, de communication et
d’alimentation. La figure 4 montre un exemple d’un réseau de capteurs.
Figure 4 : Exemple de réseaux de capteurs
10
Un RCSF est composé d'un ensemble de nœuds capteurs qui sont organisés en champs
«Sensor Fields». Chacun de ces nœuds a la capacité de collecter des données et de les
transférer au nœud passerelle par l'intermédiaire d'une architecture multi-sauts. Le nœud
passerelle transmet ensuite ces données par Internet ou par satellite à l'ordinateur central
«Gestionnaire de tâches» pour analyser ces données et prendre des décisions.
IV. Applications des réseaux de capteurs
La taille de plus en plus réduite des micro-capteurs, le coût de plus en plus faible, la large
gamme des types de capteurs disponibles (thermique, optique, vibrations,...) ainsi que le
support de communication sans fil utilisé, permettent aux réseaux de capteurs d'envahir
plusieurs domaines d'applications. Ils permettent aussi d'étendre les applications existantes
et de faciliter la conception d'autres systèmes tels que le contrôle et l'automatisation des
chaînes de montage. Les réseaux de capteurs ont le potentiel de révolutionner la manière
même de comprendre et de construire les systèmes physiques complexes. Les réseaux de
capteurs peuvent se révéler très utiles dans de nombreuses applications lorsqu'il s'agit de
collecter et de traiter des informations provenant de l'environnement. Parmi les domaines où
ces réseaux peuvent offrir les meilleures contributions, nous citons les domaines : militaire,
environnemental, domestique, santé, sécurité, etc. Des exemples d'applications potentielles
dans ces différents domaines sont exposés ci-dessous ;
1- Applications militaires
Comme dans le cas de plusieurs technologies, le domaine militaire a été un moteur
initial pour le développement des réseaux de capteurs. Le déploiement rapide, le coût
réduit, l'auto-organisation et la tolérance aux pannes des réseaux de capteurs sont des
caractéristiques qui rendent ce type de réseaux un outil appréciable dans un tel domaine.
Figure 5 : réseau de capteurs militaire
Comme exemple d'application dans ce domaine, on peut penser à un réseau de capteurs
déployé sur un endroit stratégique ou difficile d'accès, afin de surveiller toutes les
activités des forces ennemies, ou d'analyser le terrain avant d'y envoyer des troupes
11
(détection d'agents chimiques, biologiques ou de radiations). Des tests concluants ont
déjà été réalisés dans ce domaine par l'armée américaine dans le désert de Californie.
2- Applications à la sécurité
Les altérations dans la structure d'un bâtiment, suite à un séisme ou au vieillissement,
pourraient être détectées par des capteurs intégrés dans les murs ou dans le béton, sans
alimentation électrique ou autres connexions filaires. Les capteurs doivent s'activer
périodiquement et peuvent ainsi fonctionner durant des années, voire des décennies. Un
réseau de capteurs de mouvements peut constituer un système d'alarme distribué qui
servira à détecter les intrusions sur un large secteur. Déconnecter le système ne serait
plus aussi simple, puisque il n'existe pas de point critique. La surveillance de voies
ferrées pour prévenir des accidents avec des animaux et des êtres humains peut être une
application intéressante des réseaux de capteurs.
Figure 6 : Application à la sécurité
La protection des barrages pourrait être accomplie en y introduisant des capteurs. La
détection de fuites d'eau permettrait d'éviter des dégâts. Les êtres humains sont
conscients des risques et attaques qui les menacent. Du coup, ils mettent à disposition
toutes les ressources humaines et financières nécessaires pour leur sécurité. Cependant,
des failles sont toujours présentes dans les mécanismes de sécurisation appliqués
aujourd'hui, sans oublier leur coût très élevé. L'application des réseaux de capteurs dans
le domaine de la sécurité pourrait diminuer considérablement les dépenses financières
consacrées à la sécurisation des lieux et à la protection des êtres humains tout en
garantissant de meilleurs résultats.
3- Applications environnementales
Des thermo-capteurs dispersés à partir d'un avion sur une forêt peuvent signaler un
éventuel début d'incendie dans le champ de captage; ce qui permettra une meilleure
efficacité pour la lutte contre les feux de forêt. Dans les champs agricoles, les capteurs
peuvent être semés avec les graines. Ainsi, les zones sèches seront facilement identifiées
et l'irrigation sera donc plus efficace. Sur les sites industriels, les centrales nucléaires ou
dans les pétroliers, des capteurs peuvent être déployés pour détecter des fuites de
produits toxiques (gaz, produits chimiques, éléments radioactifs, pétrole, etc.) et alerter
les utilisateurs dans un délai suffisamment court pour permettre une intervention
efficace.
12
Figure 7 : Application environnementale
Une grande quantité de capteurs peut être déployée en forêt ou dans un environnement
de conservation de la faune afin de recueillir des informations diverses sur l'état du
milieu naturel et sur les comportements de déplacement. Par exemple, l'université de
Pise en Italie a réalisé des réseaux de capteurs pour le contrôle des parcs naturels (feux,
animaux,..). Il est ainsi possible "d'observer", sans déranger, des espèces animales
difficiles à étudier dans leur environnement naturel et de proposer des solutions plus
efficaces pour la conservation de la faune. Les éventuelles conséquences de la dispersion
en masse des micro-capteurs dans l'environnement ont soulevé plusieurs inquiétudes. En
effet, chaque micro-capteur est doté d'une batterie qui contient des métaux nocifs.
Néanmoins, le déploiement d'un million de capteurs de 1 millimètre cube chacun ne
représente qu'un volume total d'un litre. Même si tout ce volume était constitué de
batteries, cela n'aurait pas des répercussions désastreuses sur l'environnement.
4- Applications médicales
On pourrait imaginer que dans le futur, la surveillance des fonctions vitales de l'être
humain serait possible grâce à des micro-capteurs qui pourront être avalés ou implantés
sous la peau. Actuellement, des micro-caméras qui peuvent être avalées existent. Elles
sont capables, sans avoir recours à la chirurgie, de transmettre des images de l'intérieur
d'un corps humain avec une autonomie de 24 heures. Les auteurs d'une récente étude,
présentent des capteurs qui fonctionnent à l'intérieur du corps humain pour traiter
certains types de maladies. Leur projet actuel est de créer une rétine artificielle
composée de 100 micro-capteurs pour corriger la vue.
13
Figure 8 : ensemble de capteurs dans un corps humain.
D'autres ambitieuses applications biomédicales sont aussi présentées, tel que : la
surveillance du niveau de glucose, le monitoring des organes vitaux ou la détection de
cancers. L'utilisation des réseaux de capteurs dans le domaine de la médecine pourrait
apporter une surveillance permanente des patients et une possibilité de collecter des
informations physiologiques de meilleure qualité, facilitant ainsi le diagnostic de
quelques maladies.
5- Applications commerciales
Il est possible d'intégrer des nœuds capteurs au processus de stockage et de livraison.
Le réseau ainsi formé, pourra être utilisé pour connaître la position, l'état et la direction
d'un paquet ou d'une cargaison. Il devient alors possible pour un client qui attend la
réception d'un paquet, d'avoir un avis de livraison en temps réel et de connaître la
position actuelle du paquet. Pour les entreprises manufacturières, les réseaux de capteurs
permettront de suivre le procédé de production à partir des matières premières jusqu'au
produit final livré. Grâce aux réseaux de capteurs, les entreprises pourraient offrir une
meilleure qualité de service tout en réduisant leurs coûts. Dans les immeubles, le
système de climatisation peut être conçu en intégrant plusieurs micro-capteurs dans les
tuiles du plancher et les meubles. Ainsi, La climatisation pourra être déclenchée
seulement aux endroits où il y a des personnes présentes et seulement si c'est nécessaire.
Le système distribué pourra aussi maintenir une température homogène dans les pièces.
Utilisée à grande échelle, une telle application permettrait de réduire la demande
mondiale en énergie réduisant du même coup les gaz à effet de serre. Rien que pour les
Etats-Unis, on estime cette économie à 55 milliards de dollars par an avec une
diminution de 35 million de tonnes des émissions de carbone dans l'air. Ainsi, dans un
contexte mondial où le réchauffement de la planète devient une préoccupation
grandissante, une telle conséquence environnementale serait un pas dans la bonne
direction.
V. Caractéristiques des RCSF
Les RCSF ne fonctionnent pas toujours de la même manière que les MANETs.
Par exemple, la liaison radio étant intrinsèquement omnidirectionnelle, les RCSF
fonctionnent en mode diffusion (broadcast) alors que les MANETs fonctionnent
classiquement en pair-à-pair. Les caractéristiques les plus remarquables des RCSF, qui les
distinguent justement des MANETs, sont les suivantes :
14
- Le nombre de nœuds capteurs peut atteindre plusieurs centaines.
- Pour des raisons de fiabilité et suivant le mode de déploiement du RCSF, il y a en
général une forte densité des nœuds capteurs.
- A cause du mode de fabrication en grandes séries et du type industriel, il n’est pas
possible de contrôler le bon fonctionnement de chaque nœud capteur. Par ailleurs,
parmi les nœuds capteurs disposant d’une énergie électrique limitée, certains
tomberont en panne au bout d’une certaine durée de fonctionnement. Cette
caractéristique est à prendre en compte dans la conception du réseau.
- La topologie du RCSF change fréquemment à cause des défaillances des nœuds. De
plus, il se peut que l’on rajoute de nouveaux nœuds capteurs au réseau déjà déployé,
soit pour étendre le réseau ou plus sûrement pour compenser la défaillance d’un
grand nombre de nœuds, après un certain temps de fonctionnement du réseau.
- Les ressources des nœuds capteurs en termes d’énergie électrique, de puissance de
calcul et de capacité de stockage sont très limitées. Le fonctionnement de l’ensemble
aura pour souci principal de limiter la consommation d’énergie afin de prolonger la
durée de vie du réseau tout en fournissant une qualité de service acceptable.
L’utilisateur pourra, au moment du déploiement, choisir entre augmenter la durée de
vie du réseau et l’exigence des performances à fournir par le réseau.
- Les nœuds capteurs n’ont pas en général d’identifiant global à cause de leur nombre
trop grand dans le RCSF et de la surcharge que cela entraîne. Dans un RCSF,
l’importance est accordée à l’information capturée et à la zone de capture au lieu de
s’intéresser à l’identité du nœud capturant cette information.
VI. Contraintes de conception des RCSF
La conception d’un RCSF est influencée par plusieurs paramètres qui, une fois pris en
compte, génèrent un guide de conception. Ce guide peut être aussi utilisé pour comparer
entre deux RCSF. Parmi ces paramètres, nous citons les suivants :
La tolérance aux pannes :
Les algorithmes et protocoles doivent tenir compte du fait qu’un nœud peut cesser
de fonctionner par manque d’énergie ou parce qu’il a été détruit. Ils devront adapter
leur niveau de tolérance aux pannes en fonction de l’hostilité du milieu dans lequel
est déployé le réseau.
Le facteur d’échelle :
Le nombre de nœuds capteurs déployés peut atteindre des centaines, des milliers,
voir même pour certaines applications, des millions. Les protocoles et algorithmes
devront pouvoir fonctionner correctement dans tous les cas de figure. Classiquement, la densité des nœuds est de l’ordre de 300 nœuds pour 25m2 pour la surveillance de
machines et de 10 nœuds par région pour la surveillance de véhicule. Une densité de
20 nœuds/m2 est très courante. Dans une maison, on estime à 2 douzaines le nombre
d’appareils qui comporteront des capteurs. Pour la domotique, la densité devrait être
comprise entre 20 et 100 nœuds par région. Les densités devraient être encore plus
importantes si l’on insère des capteurs dans les lunettes, les vêtements, les
chaussures, les montres, les bijoux ou encore le corps humain.
15
Les coûts de production :
Si le coût d’un nœud capteur est tel que le déploiement d’un réseau revient plus
cher que les capteurs traditionnels, alors le RCSF n’est pas justifié économiquement.
L’état actuel de la technologie nous permet de produire des capteurs Bluetooth pour
dix dollars l’unité et des pico-capteurs pour moins d’un dollar. Le seuil à atteindre
pour que la solution RCSF soit économiquement faisable est bien inférieur à un
dollar.
Les contraintes matérielles :
Un nœud capteur est constitué de composants consommant de l’énergie
électrique, comme il peut aussi avoir des modules dédiés à l’application ou destinés à
la localisation ou au mouvement. Par conséquent, la capacité de la batterie
d’alimentation du nœud forme une contrainte matérielle forte. Il est aussi connu que
le volume du nœud capteur n’excède pas celui d’une boite d’allumette, ceci s’oppose
à ce qui précède. Par ailleurs, les transmissions radio d’un nœud capteur sont plus
complexes et consomment plus d’énergie que les liaisons optiques. Elles sont quand
même préférées en raison de leur temps de fonctionnement très bref. Ensuite, bien
que les progrès soient constants en micro-électronique, les ressources du
microprocesseur sont limitées. Parfois, certains nœuds possèdent un système GPS
pour se localiser, mais cela n’est pas rentable économiquement.
La topologie du réseau :
La forte probabilité de panne d’un nœud capteur ou la possibilité de rajouter des
nœuds font que la topologie du réseau doit pouvoir changer dynamiquement. Il faut
donc gérer avec précision la maintenance de cette topologie. On distingue trois
phases : le déploiement, le post-déploiement et le redéploiement des nœuds capteurs.
Les nœuds capteurs peuvent êtres disséminés à partir des hauteurs ou placés dans des
localisations précises de la zone d’intérêt. Quelle que soit la méthode utilisée, le coût
du déploiement doit rester le plus faible possible. A cause des déplacements des
nœuds, d’obstacles mobiles ou de brouillages volontaires, des actions post-
déploiement peuvent être opérées sur la topologie du RCSF. Des nœuds capteurs
peuvent aussi être déployés dans un deuxième temps pour remplacer ceux tombés en
panne ou détruits. La topologie d’un RCSF doit s’adapter à toutes les situations, à
savoir les pannes, la mobilité et le rajout des nœuds.
L’environnement de déploiement :
Les nœuds peuvent être déployés tout près de l’objet à surveiller ou en son sein.
L’environnement de déploiement peut être à l’intérieur d’une grosse machine, au
fond d’un océan, dans un lieu contaminé biologiquement ou chimiquement, dans un
champ de bataille, dans une maison ou un immeuble, sur un animal, sur un véhicule,
etc. Ces situations très variées engendrent des contraintes très fortes de
l’environnement sur les nœuds capteurs.
Le support de transmission :
Le support de transmission des nœuds doit être universel. Une possibilité est de
choisir, pour les transmissions radio, les bandes de fréquences des domaines de
l’industrie, les sciences et la santé, qui ne nécessitent pas de licences et sont
disponibles dans tous les pays. Des contraintes de puissance et de consommation
d’énergie font qu’en réalité se sont les hautes fréquences qui sont avantageuses. Le
16
choix s’est porté sur la bande des 433Mhz en Europe et des 915Mhz aux USA. La
transmission infrarouge aurait pu être intéressante, mais elle a été écartée parce
qu’elle exige une vue directe entre l’émetteur et le récepteur.
Le traitement des données :
Sachant que le traitement d’un paquet est beaucoup moins coûteux que sa
transmission par un nœud capteur, on privilégie alors systématiquement les
traitements locaux dans chaque nœud capteur (filtrage, calcul de la moyenne, etc.)
pour minimiser le volume des données circulant dans le RCSF.
La consommation d’énergie :
Les nœuds capteurs embarquent en général une quantité d’énergie très limitée.
Les transmissions de données entre les nœuds consomment beaucoup d’énergie,
surtout si des nœuds tombent en panne et qu’il faut réorganiser le RCSF. C’est
pourquoi des algorithmes et des protocoles ont été développés ayant pour principal
souci l’économie d’énergie, au détriment parfois de la qualité de service fournie par
un RCSF.
VII. Conclusion
Les réseaux de capteurs sans fil ne cessent de prendre une place très appréciée au sein de
la communauté de la recherche vu leurs déploiement assez simple et leurs applications qui
se développent chaque jour pour élargir leurs horizons. Initialement, réserves pour les
applications militaires Aujourd’hui, les WSNs ont réussi à conquérir d’autres domaines
civils plus larges et plus pratiques changeant le quotidien des êtres humains.

17

18
I. Introduction :
Le routage consiste à trouver un chemin pour envoyer le message de la source à la
destination.
Dans le cadre des réseaux de capteurs, le routage doit être efficace en énergie. Pour cela, il
faut bien sûr être capable de trouver une route qui ne coûte pas trop d’énergie, une route pas
trop longue. Mais il faut aussi être capable de trouver ou de maintenir les routes sans
dépenser trop d’´energie. Les protocoles dans lesquels on maintient à jour des tables de
routage à l’aide d’envois périodiques de paquets “hello” ont un coût constant non
négligeable. Ce coût constant est particulièrement pénalisant puisque l’on a des trafics tr`es
sporadiques : maintenir une table de routage, pour avoir des routes tr`es efficaces, n’est pas
intéressant si l’on n’utilise que tr`es rarement ces routes.
Les protocoles de routage spécifiques aux réseaux de capteurs doivent tenir compte du type
de communications induit par l’application. Outre le fait que la quantité de données
échangées est tr`es faible par rapport aux applications de types réseaux ad hoc, notons que le
trafic est particulièrement prévisible puisqu’il va des nœuds vers le puits ou du puits vers les
nœuds.
Nous ne faisons pas ici un état de l’art des protocoles de routages. Nous voulons seulement
présenter des protocoles types des réseaux de capteurs.
II. Les différents protocoles de routage :
1. Inondation :
L’inondation (“flooding”, en anglais) consiste à envoyer un message à tout le réseau.
L’émetteur envoie le message à tous ses voisins. Chaque voisin envoie à son tour le
message à tous ses voisins et ainsi de suite. Les nœuds vont donc recevoir le même
message plusieurs fois de différents voisins.
Pour éviter que le message ne se multiplie dans le réseau, chaque nœud ne le renvoie
qu’une seule fois.
Pour ce faire, chaque message envoyé en inondation a un identifiant unique. Les nœuds
qui ré-émettent le message notent l’identifiant. S’ils reçoivent à nouveau un message avec
cet identifiant, ils ne le renvoient pas.
2. Gossiping : Dans cette technique, dérivée de la technique d’inondation, le nœud ne diffuse pas les
messages reçus à tous ses voisins, mais il les transmet à un seul, sélectionné aléatoirement.
En effet, chaque nœud capteur dans le réseau sélectionne aléatoirement un nœud parmi ses
voisins pour lui transmettre les données reçues, une fois le nœud voisin reçoit ces données,
il choisit un autre nœud d’une façon aléatoire pour lui transmettre ces données à son tour.
Malgré que cette approche évite le problème d’implosion en ayant une seule copie du
message au niveau de chaque nœud, elle prend beaucoup plus de temps pour propager les
messages dans tout le réseau.
19
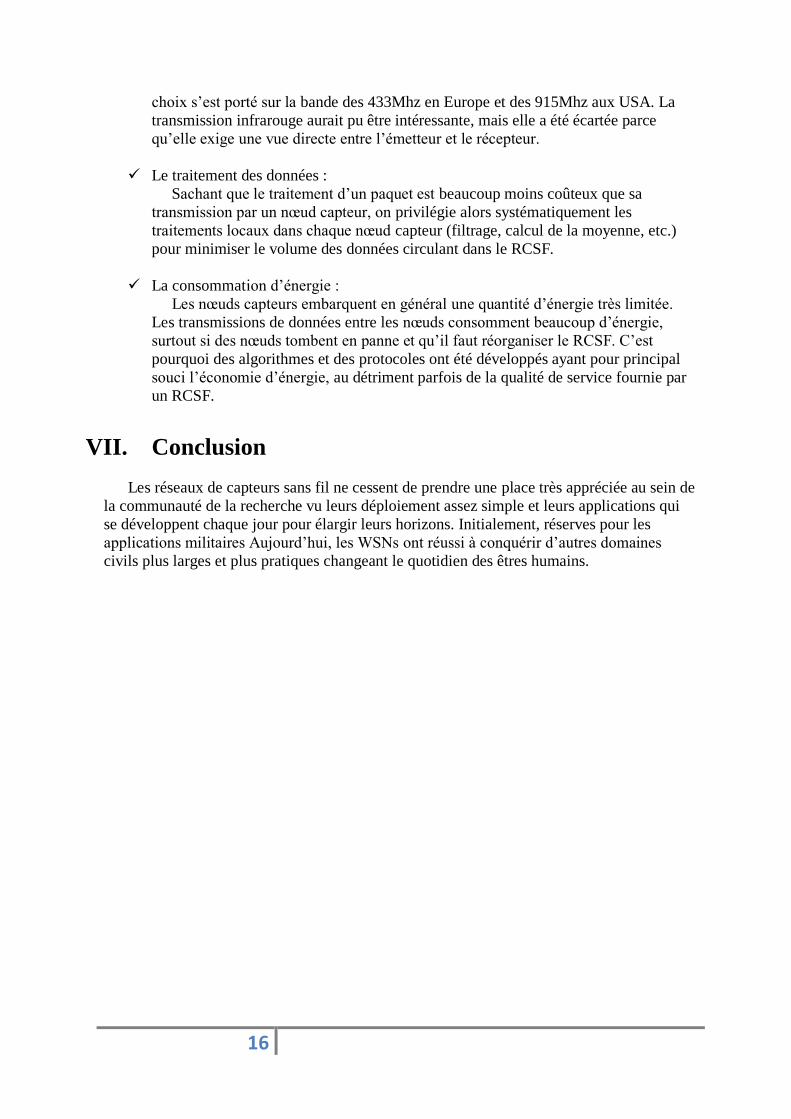
3. SPIN:
L'idée derrière le SPIN est de nommer les données en utilisant des descripteurs de haut
niveau ou des métas donnés. Avant la transmission, les méta- données sont échangées entre
les capteurs par un mécanisme de publicité de données. Chaque nœud recevant de
nouvelles données, l'annonce à ses voisins et ceux intéressés récupèrent les données en
envoyant une requête.
Méthode : Fonctionnement de SPIN
Les communications dans SPIN se font en trois étapes :
Lorsqu'un nœud veut émettre une donnée, il émet d'abord un message ADV contenant
une description de la donnée en question.
Un nœud recevant un message ADV, consulte sa base d'intérêt. S'il est intéressé par
cette information, il émet un message REQ vers son voisin.
En recevant un message REQ, l'émetteur transmet à l'intéressé la donnée sous forme
d'un message DATA.
Figure 9: le protocole SPIN. Le nœud A annonce ses données au nœud B (a). B répond
par une requête (b). B reçoit les données requises (c). B fait de la publicité à ses voisins (d)
qui répondent par des requêtes (e-f)
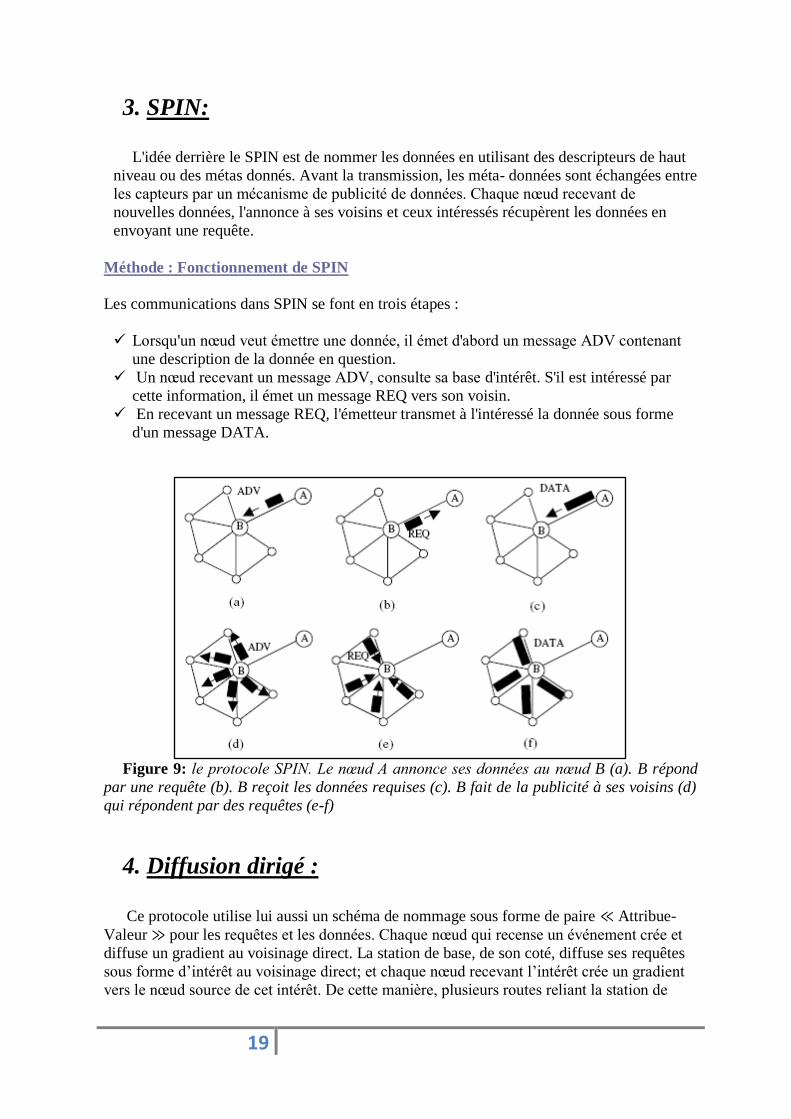
4. Diffusion dirigé :
Ce protocole utilise lui aussi un schéma de nommage sous forme de paire ≪ Attribue-
Valeur ≫ pour les requêtes et les données. Chaque nœud qui recense un événement crée et
diffuse un gradient au voisinage direct. La station de base, de son coté, diffuse ses requêtes
sous forme d’intérêt au voisinage direct; et chaque nœud recevant l’intérêt crée un gradient
vers le nœud source de cet intérêt. De cette manière, plusieurs routes reliant la station de
20
base à la source de données sont réalisées; puis la meilleure route sera renforcée pour éviter
la redondance.
Définition : Gradient: Un gradient est un vecteur représentant l'intérêt. Il est caractérisé par une
direction et une amplitude : la direction est modélisée par le voisin émetteur de l'intérêt, et
l'amplitude est représentée par le débit de données. En plus, chaque entrée contient un
champ limitant la durée de validité du gradient.
Figure 10: Fonctionnement du protocole DD
DD est différent de SPIN en deux aspects:
1) dans SPIN, c’est les nœuds sources de données qui diffuse eux-mêmes les métas-data
pour que les autres nœuds qui les requièrent puissent les retrouver aisément lors de la phase
de recherche de données. Alors que, dans DD c’est la station de base qui diffuse les requêtes
sous forme d’intérêt.
2) dans DD la communication s’effectue de voisin a voisin ou chaque nœud agrège les
données et garde en mémoire le chemin de provenance, par contre, dans SPIN aucune
sauvegarde de route n’est opérée.
Cependant, les échanges fréquents et réguliers d’intérêts et de gradient peuvent générer
des surconsommations d’énergie au niveau des capteurs.
5. GAF (Geographic Adaptive Fidelity):
Proposé par Y. Xu et autres en 2001, ce protocole découpe le réseau en plusieurs zones
virtuelles; chaque nœud est affecte à une zone donne selon ses coordonnées géographiques
(en utilisant le GPS). Les nœuds appartenant a la même zone sont considéré comme
équivalents en cout de routage; ainsi, on choisit seulement un nœud de chaque zone pour
router les données et les autres sont misent en mode sommeil pour conserver de l’énergie. De
cette façon, la durée de vie du réseau est augmentée en fonction du nombre total des nœuds
inactifs.
21
Dans GAF le nœud peut se retrouver dans l’un des trois cas possibles: (1)- Mode
découvert: pour déterminer ses voisins de zone; (2)- Actif: s’il participe dans le routage de
données et (3)- Endormi: s’il ne participe pas au routage.
Pour supporter la mobilité, chaque nœud estime et diffuse le temps nécessaire pour
quitter sa zone a ses voisins. Sur la base de ce temps ils estiment leurs temps de réveil pour
choisir celui qui va prendre le relais parmi eux.
Il faut noter que GAF ne prend pas en compte l’énergie du nœud lors du choix du
représentant, ce qui peut générer des trous dans le réseau une fois que ce dernier épuise son
énergie.
6. LEACH (Low-Energy Adaptive Clusting Hierarchy):
Le protocole LEACH est le plus populaire des protocoles de routage hiérarchique. Sont
principal avantage est de minimiser la consommation énergétique des éléments du réseau.
Dans ce protocole le réseau est divisé en clusters et chaque cluster possède un nœud maitre
appelé cluster-head. Ce dernier prend en charge la gestion de son cluster. Il est élu
périodiquement parmi les nœuds formant le cluster, en fonction de l’état de sa batterie.
7. PEGASIS (Power-Efficient Gathering in Sensor
Information Systems):
Il est considéré comme une optimisation de LEACH, propose par Lindsey et autres en
2002; PEGASIS regroupe les nœuds du réseau sous forme d’une longue chaine en se basant
sur le principe qui stipule qu’un nœud ne peut communiquer qu’avec le nœud le plus proche
de lui. Ainsi, il ajuste sa radio pour une communication très courte pour conserver son
énergie. Pour communiquer avec le puits, le processus est organise en rounds; au cours de
chaque round un seul nœud est autorise à communiquer avec le puits directement. Ce
privilège est accorde a l’ensemble des nœuds du réseau a tour de rôle. Une meilleure
conservation d’énergie est obtenue, également, en agrégeant les données sur chaque nœud du
réseau.
22
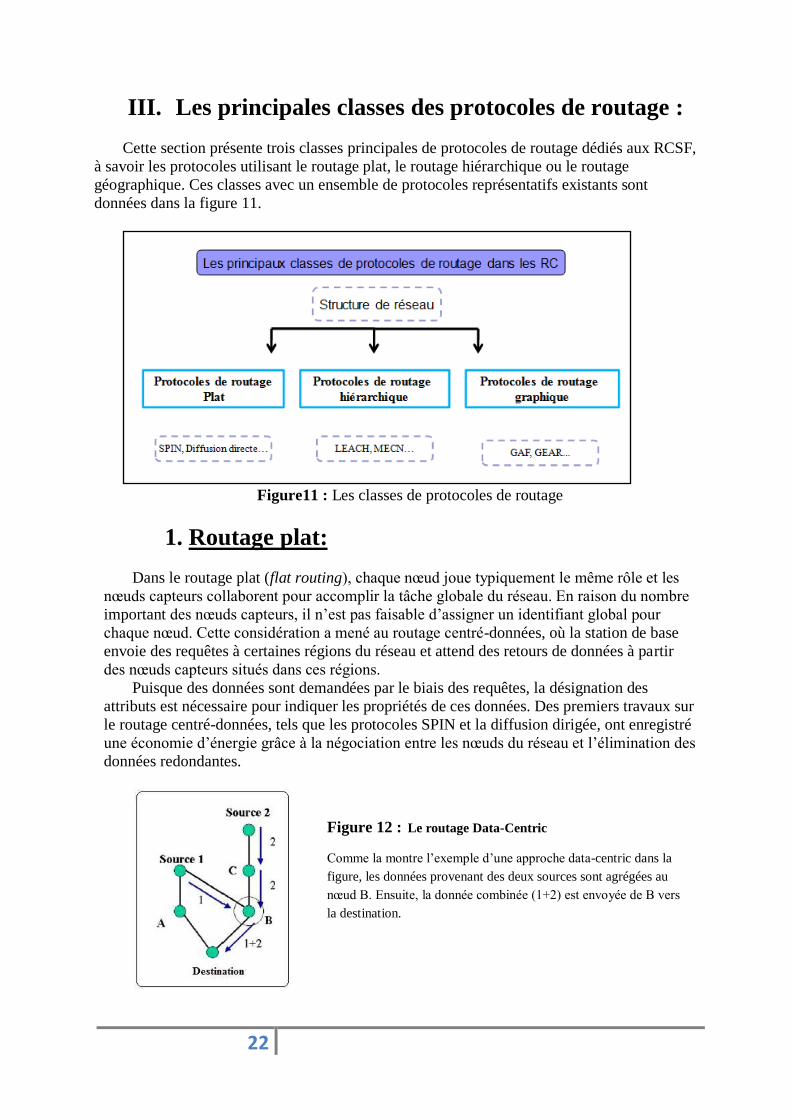
III. Les principales classes des protocoles de routage :
Cette section présente trois classes principales de protocoles de routage dédiés aux RCSF,
à savoir les protocoles utilisant le routage plat, le routage hiérarchique ou le routage
géographique. Ces classes avec un ensemble de protocoles représentatifs existants sont
données dans la figure 11.
Figure11 : Les classes de protocoles de routage
1. Routage plat:
Dans le routage plat (flat routing), chaque nœud joue typiquement le même rôle et les
nœuds capteurs collaborent pour accomplir la tâche globale du réseau. En raison du nombre
important des nœuds capteurs, il n’est pas faisable d’assigner un identifiant global pour
chaque nœud. Cette considération a mené au routage centré-données, où la station de base
envoie des requêtes à certaines régions du réseau et attend des retours de données à partir
des nœuds capteurs situés dans ces régions.
Puisque des données sont demandées par le biais des requêtes, la désignation des
attributs est nécessaire pour indiquer les propriétés de ces données. Des premiers travaux sur
le routage centré-données, tels que les protocoles SPIN et la diffusion dirigée, ont enregistré
une économie d’énergie grâce à la négociation entre les nœuds du réseau et l’élimination des
données redondantes.
Figure 12 : Le routage Data-Centric
Comme la montre l’exemple d’une approche data-centric dans la
figure, les données provenant des deux sources sont agrégées au
nœud B. Ensuite, la donnée combinée (1+2) est envoyée de B vers
la destination.
23
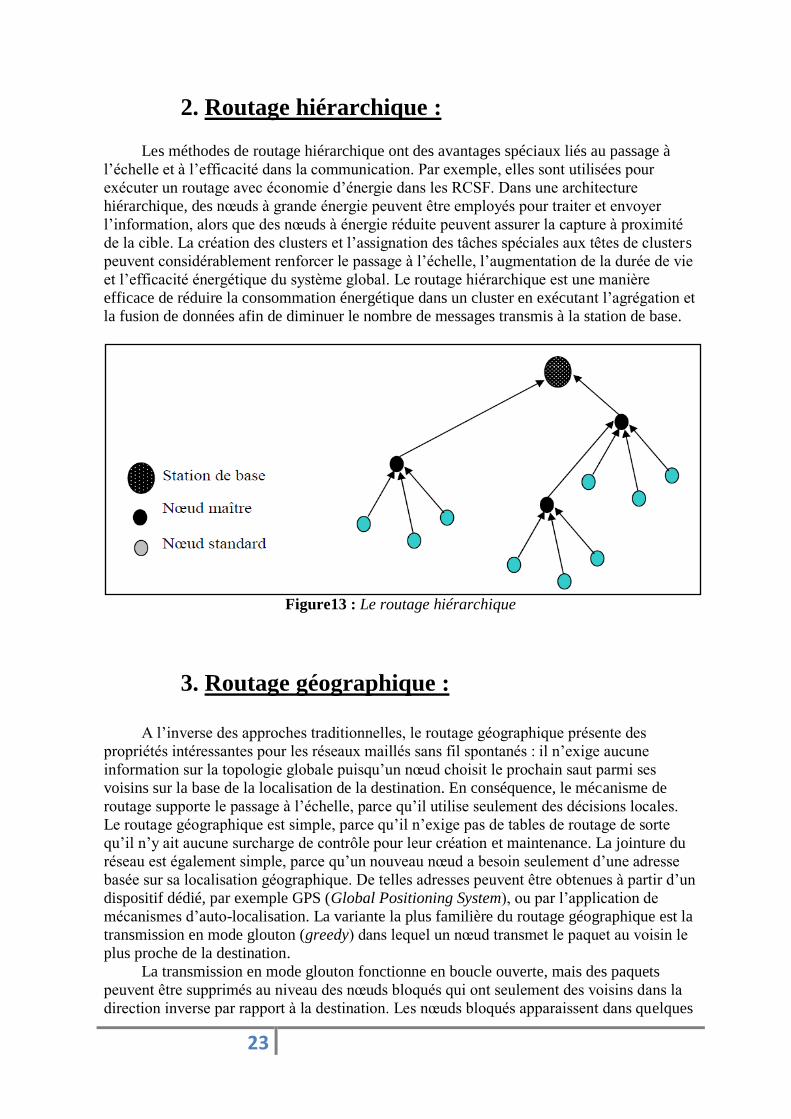
2. Routage hiérarchique : Les méthodes de routage hiérarchique ont des avantages spéciaux liés au passage à
l’échelle et à l’efficacité dans la communication. Par exemple, elles sont utilisées pour
exécuter un routage avec économie d’énergie dans les RCSF. Dans une architecture
hiérarchique, des nœuds à grande énergie peuvent être employés pour traiter et envoyer
l’information, alors que des nœuds à énergie réduite peuvent assurer la capture à proximité
de la cible. La création des clusters et l’assignation des tâches spéciales aux têtes de clusters
peuvent considérablement renforcer le passage à l’échelle, l’augmentation de la durée de vie
et l’efficacité énergétique du système global. Le routage hiérarchique est une manière
efficace de réduire la consommation énergétique dans un cluster en exécutant l’agrégation et
la fusion de données afin de diminuer le nombre de messages transmis à la station de base.
Figure13 : Le routage hiérarchique
3. Routage géographique :
A l’inverse des approches traditionnelles, le routage géographique présente des
propriétés intéressantes pour les réseaux maillés sans fil spontanés : il n’exige aucune
information sur la topologie globale puisqu’un nœud choisit le prochain saut parmi ses
voisins sur la base de la localisation de la destination. En conséquence, le mécanisme de
routage supporte le passage à l’échelle, parce qu’il utilise seulement des décisions locales.
Le routage géographique est simple, parce qu’il n’exige pas de tables de routage de sorte
qu’il n’y ait aucune surcharge de contrôle pour leur création et maintenance. La jointure du
réseau est également simple, parce qu’un nouveau nœud a besoin seulement d’une adresse
basée sur sa localisation géographique. De telles adresses peuvent être obtenues à partir d’un
dispositif dédié, par exemple GPS (Global Positioning System), ou par l’application de
mécanismes d’auto-localisation. La variante la plus familière du routage géographique est la
transmission en mode glouton (greedy) dans lequel un nœud transmet le paquet au voisin le
plus proche de la destination.
La transmission en mode glouton fonctionne en boucle ouverte, mais des paquets
peuvent être supprimés au niveau des nœuds bloqués qui ont seulement des voisins dans la
direction inverse par rapport à la destination. Les nœuds bloqués apparaissent dans quelques

24
places proches des zones non-couvertes (des vides) ou près des obstacles à l’intérieur du
champ de déploiement du réseau. L’économie en énergie augmente ainsi en fonction du
nombre de nœuds en état de veille dans le réseau.
IV. Conclusion :
Nous avons essayé à travers ce chapitre de mettre le point sur les différents protocoles
de routage dédiés aux RCSFs, et les classer en trois classes différentes selon la structure du
réseau. Cette mise au point nous a permis de déduire que le protocole LEACH « protocole
hiérarchique » est le plus populaire des protocoles de routage. Cela nous a mené à faire une
étude complète de ce protocole proposés dans le chapitre qui suit.
25
26
Le protocole LEACH (Low-Energy Adaptive Clustering
Hierarchy):
1. Introduction :
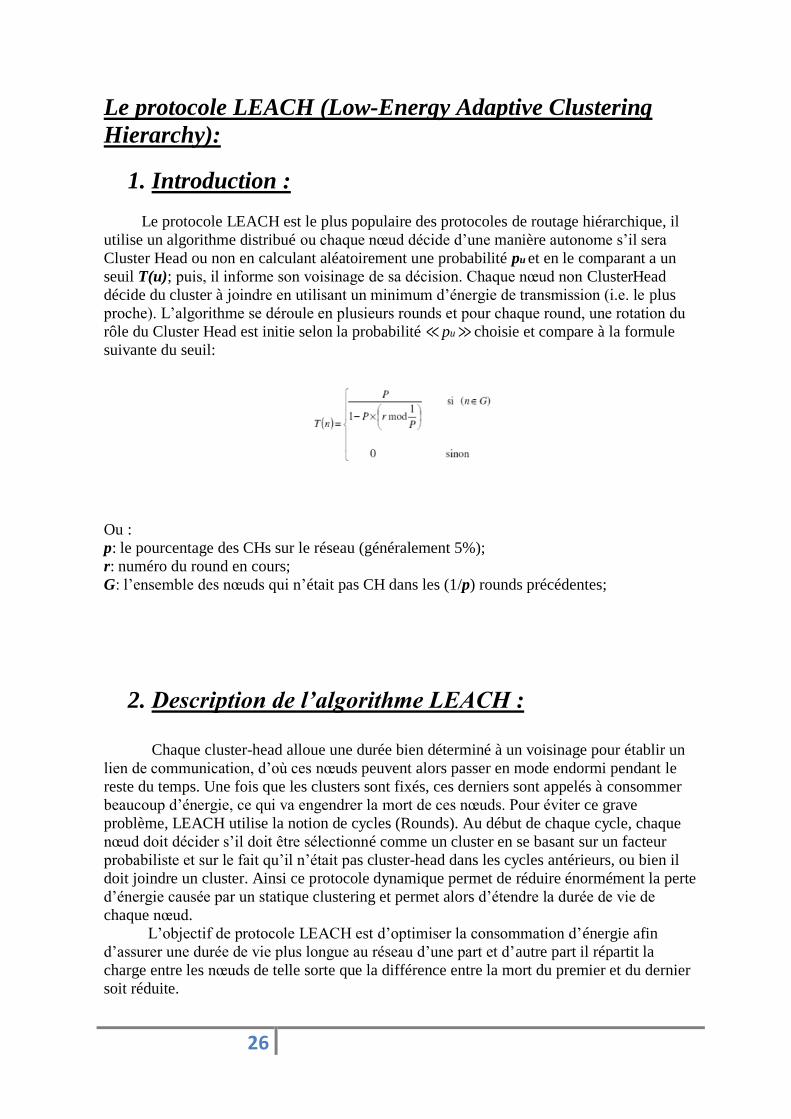
Le protocole LEACH est le plus populaire des protocoles de routage hiérarchique, il
utilise un algorithme distribué ou chaque nœud décide d’une manière autonome s’il sera
Cluster Head ou non en calculant aléatoirement une probabilité pu et en le comparant a un
seuil T(u); puis, il informe son voisinage de sa décision. Chaque nœud non ClusterHead
décide du cluster à joindre en utilisant un minimum d’énergie de transmission (i.e. le plus
proche). L’algorithme se déroule en plusieurs rounds et pour chaque round, une rotation du
rôle du Cluster Head est initie selon la probabilité ≪ pu ≫ choisie et compare à la formule
suivante du seuil:
Ou :
p: le pourcentage des CHs sur le réseau (généralement 5%);
r: numéro du round en cours;
G: l’ensemble des nœuds qui n’était pas CH dans les (1/p) rounds précédentes;
2. Description de l’algorithme LEACH :
Chaque cluster-head alloue une durée bien déterminé à un voisinage pour établir un
lien de communication, d’où ces nœuds peuvent alors passer en mode endormi pendant le
reste du temps. Une fois que les clusters sont fixés, ces derniers sont appelés à consommer
beaucoup d’énergie, ce qui va engendrer la mort de ces nœuds. Pour éviter ce grave
problème, LEACH utilise la notion de cycles (Rounds). Au début de chaque cycle, chaque
nœud doit décider s’il doit être sélectionné comme un cluster en se basant sur un facteur
probabiliste et sur le fait qu’il n’était pas cluster-head dans les cycles antérieurs, ou bien il
doit joindre un cluster. Ainsi ce protocole dynamique permet de réduire énormément la perte
d’énergie causée par un statique clustering et permet alors d’étendre la durée de vie de
chaque nœud.
L’objectif de protocole LEACH est d’optimiser la consommation d’énergie afin
d’assurer une durée de vie plus longue au réseau d’une part et d’autre part il répartit la
charge entre les nœuds de telle sorte que la différence entre la mort du premier et du dernier
soit réduite.
27
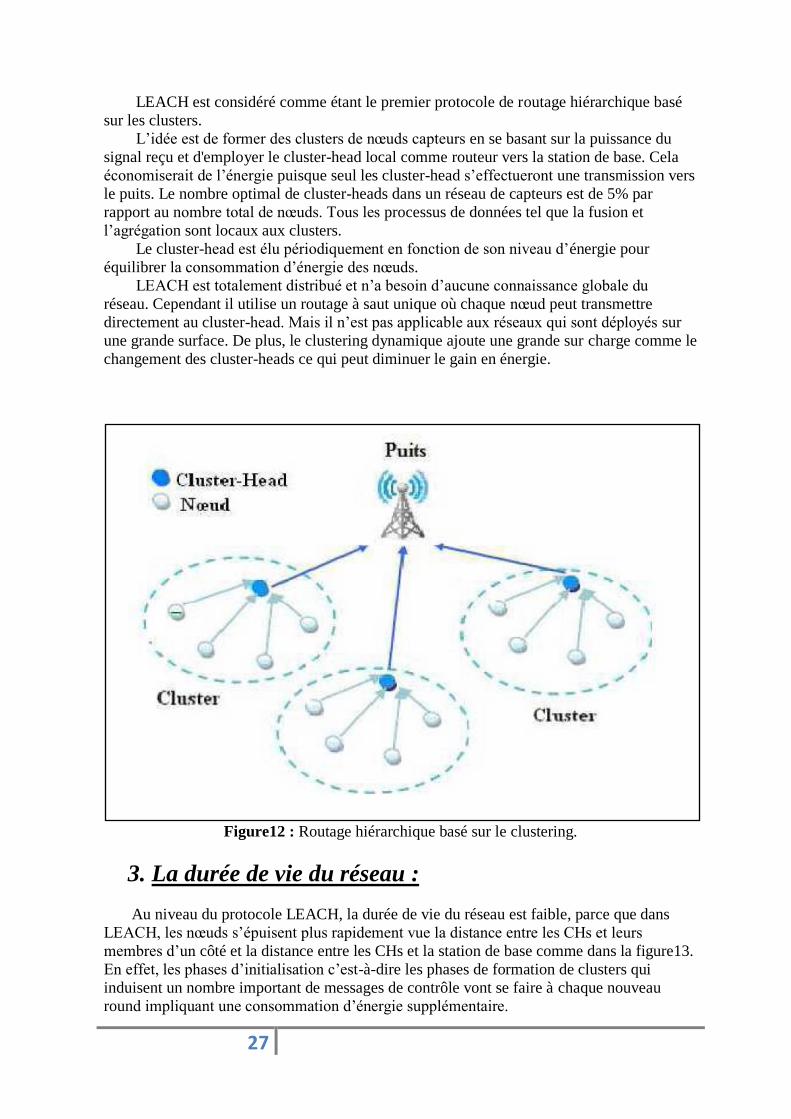
LEACH est considéré comme étant le premier protocole de routage hiérarchique basé
sur les clusters.
L’idée est de former des clusters de nœuds capteurs en se basant sur la puissance du
signal reçu et d'employer le cluster-head local comme routeur vers la station de base. Cela
économiserait de l’énergie puisque seul les cluster-head s’effectueront une transmission vers
le puits. Le nombre optimal de cluster-heads dans un réseau de capteurs est de 5% par
rapport au nombre total de nœuds. Tous les processus de données tel que la fusion et
l’agrégation sont locaux aux clusters.
Le cluster-head est élu périodiquement en fonction de son niveau d’énergie pour
équilibrer la consommation d’énergie des nœuds.
LEACH est totalement distribué et n’a besoin d’aucune connaissance globale du
réseau. Cependant il utilise un routage à saut unique où chaque nœud peut transmettre
directement au cluster-head. Mais il n’est pas applicable aux réseaux qui sont déployés sur
une grande surface. De plus, le clustering dynamique ajoute une grande sur charge comme le
changement des cluster-heads ce qui peut diminuer le gain en énergie.
Figure12 : Routage hiérarchique basé sur le clustering.
3. La durée de vie du réseau :
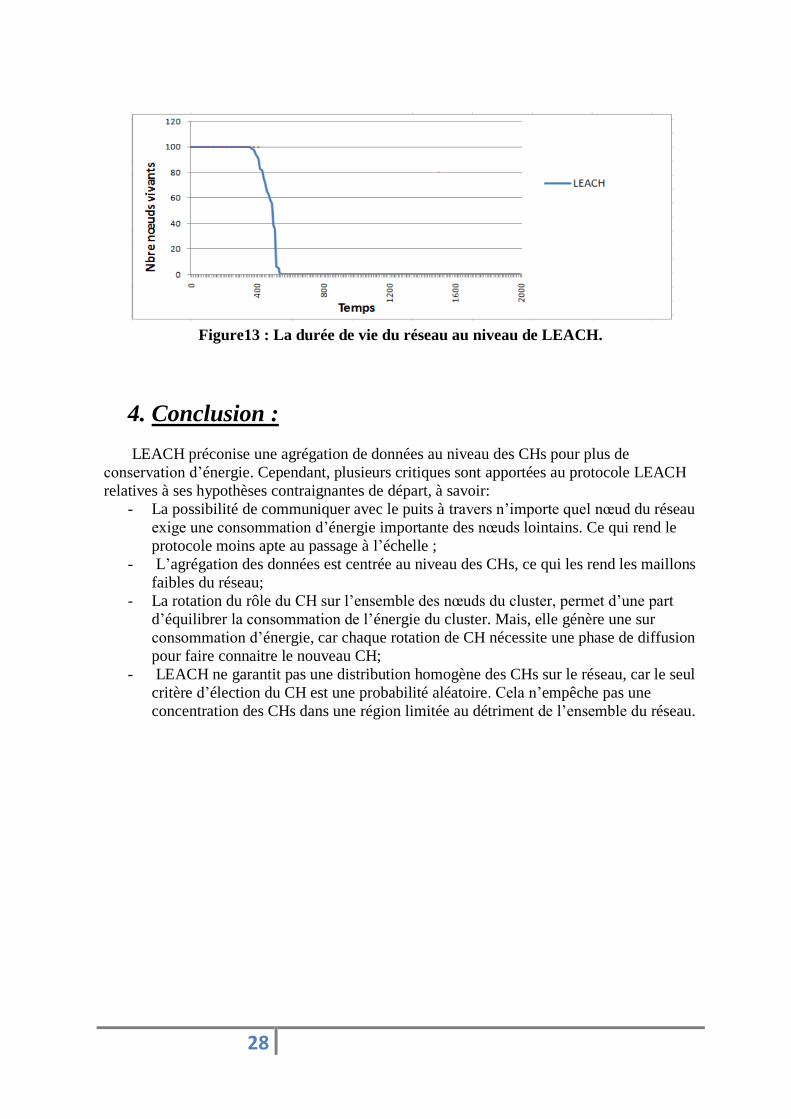
Au niveau du protocole LEACH, la durée de vie du réseau est faible, parce que dans
LEACH, les nœuds s’épuisent plus rapidement vue la distance entre les CHs et leurs
membres d’un côté et la distance entre les CHs et la station de base comme dans la figure13.
En effet, les phases d’initialisation c’est-à-dire les phases de formation de clusters qui
induisent un nombre important de messages de contrôle vont se faire à chaque nouveau
round impliquant une consommation d’énergie supplémentaire.
28
Figure13 : La durée de vie du réseau au niveau de LEACH.
4. Conclusion :
LEACH préconise une agrégation de données au niveau des CHs pour plus de
conservation d’énergie. Cependant, plusieurs critiques sont apportées au protocole LEACH
relatives à ses hypothèses contraignantes de départ, à savoir:
- La possibilité de communiquer avec le puits à travers n’importe quel nœud du réseau
exige une consommation d’énergie importante des nœuds lointains. Ce qui rend le
protocole moins apte au passage à l’échelle ;
- L’agrégation des données est centrée au niveau des CHs, ce qui les rend les maillons
faibles du réseau;
- La rotation du rôle du CH sur l’ensemble des nœuds du cluster, permet d’une part
d’équilibrer la consommation de l’énergie du cluster. Mais, elle génère une sur
consommation d’énergie, car chaque rotation de CH nécessite une phase de diffusion
pour faire connaitre le nouveau CH;
- LEACH ne garantit pas une distribution homogène des CHs sur le réseau, car le seul
critère d’élection du CH est une probabilité aléatoire. Cela n’empêche pas une
concentration des CHs dans une région limitée au détriment de l’ensemble du réseau.
29
Conclusion générale
Les réseaux de capteurs sans fil sont une réalité fonctionnelle et sont voués à se
développer rapidement du fait de la grande variété des domaines d’applications.
Evidemment, le caractère très discret des capteurs peut poser des problèmes de santé
(car ça ajoute encore des ondes à celles déjà existantes) mais aussi des problèmes d’éthique,
de sécurité ou de violation de la vie privée.
Dans le premier chapitre, nous avons défini ce qu’est un réseau de capteurs sans fil que
nous avons considéré comme un type particulier de réseau ad hoc. Puis, nous avons décrit
brièvement un réseau de capteur, ses applications, son architecture, ses principales
contraintes de conception et la consommation d’énergie.
Dans le deuxième chapitre, nous avons mis l’accent sur les principaux protocoles de
routage dans les réseaux de capteurs. Nous avons résumé les protocoles de routage dans les
réseaux de capteurs et classé les approches en trois catégories principales : les protocoles
hiérarchiques, les protocoles basés sur la localisation et les protocoles data-centric.
Enfin, Nous nous sommes concentrés sur un de ces protocoles de routage qui est le
protocole LEACH.