Synthèse de régulateurs numériques -...
28
I.D.Landau "Commande des systèmes" 1 Chapitre 3 Synthèse de régulateurs numériques 1. Structure des régulateurs numériques : exemple du PI 2. Structure canonique des régulateurs numériques 3. Boucle de régulation avec PI numérique 4. Régulateurs numériques en présence de perturbations et de bruit 5. Boucle de régulation avec PID numérique 6. Dispositifs anti windup 7. Placement de pôles 8. Méthodes de discrétisation de correcteurs continus
Transcript of Synthèse de régulateurs numériques -...
I.D.Landau "Commande des systèmes" 1
Chapitre 3
Synthèse de régulateurs numériques
1. Structure des régulateurs numériques : exemple du PI2. Structure canonique des régulateurs numériques3. Boucle de régulation avec PI numérique4. Régulateurs numériques en présence de perturbations et de bruit5. Boucle de régulation avec PID numérique6. Dispositifs anti windup7. Placement de pôles8. Méthodes de discrétisation de correcteurs continus
I.D.Landau "Commande des systèmes"2
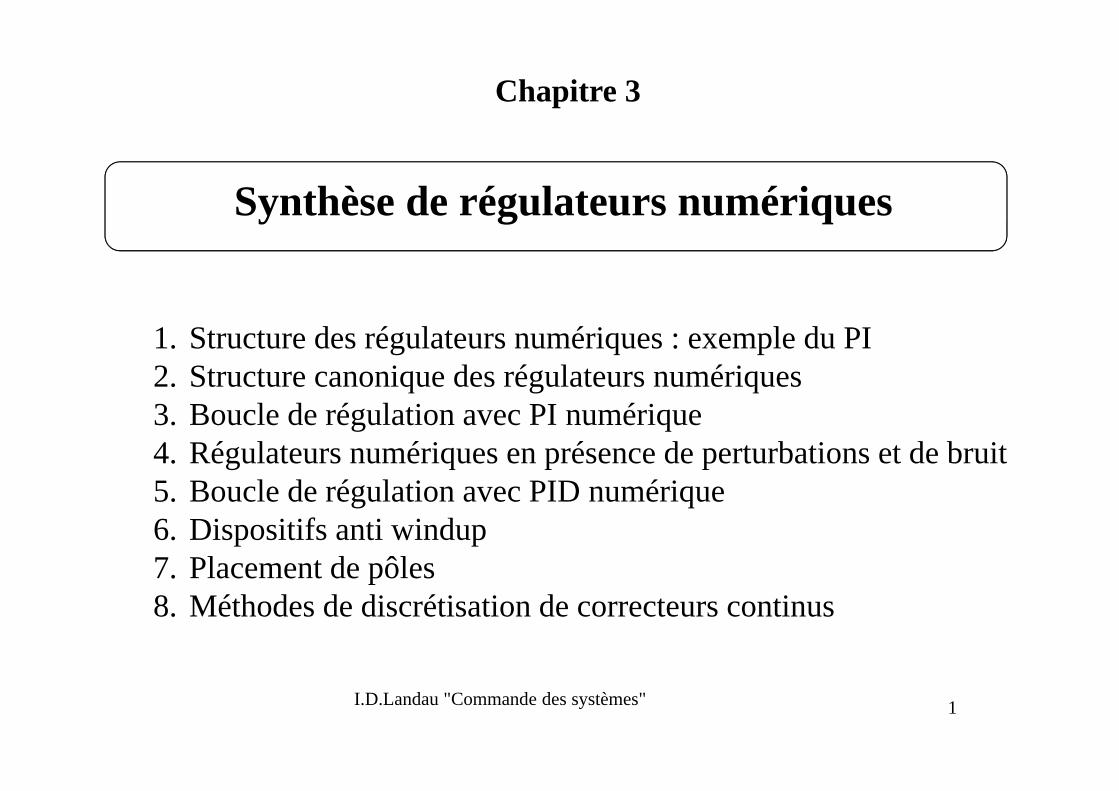
1. Structure des régulateurs numériques : cas du PI
yr(t)PROCEDE
P.I. continu
K
K/T i +
-
+
+
y(t)u(t)Régulateur (PI)
continu
yr(k)
PROCEDE
u(k) y(k)
t
t
0
r1
q-1
q-1
1
r 0
+-+
+
-
-1
qq-2
+
s 0
s1
Régulateur Numérique
Régulateurnumérique
I.D.Landau "Commande des systèmes"3
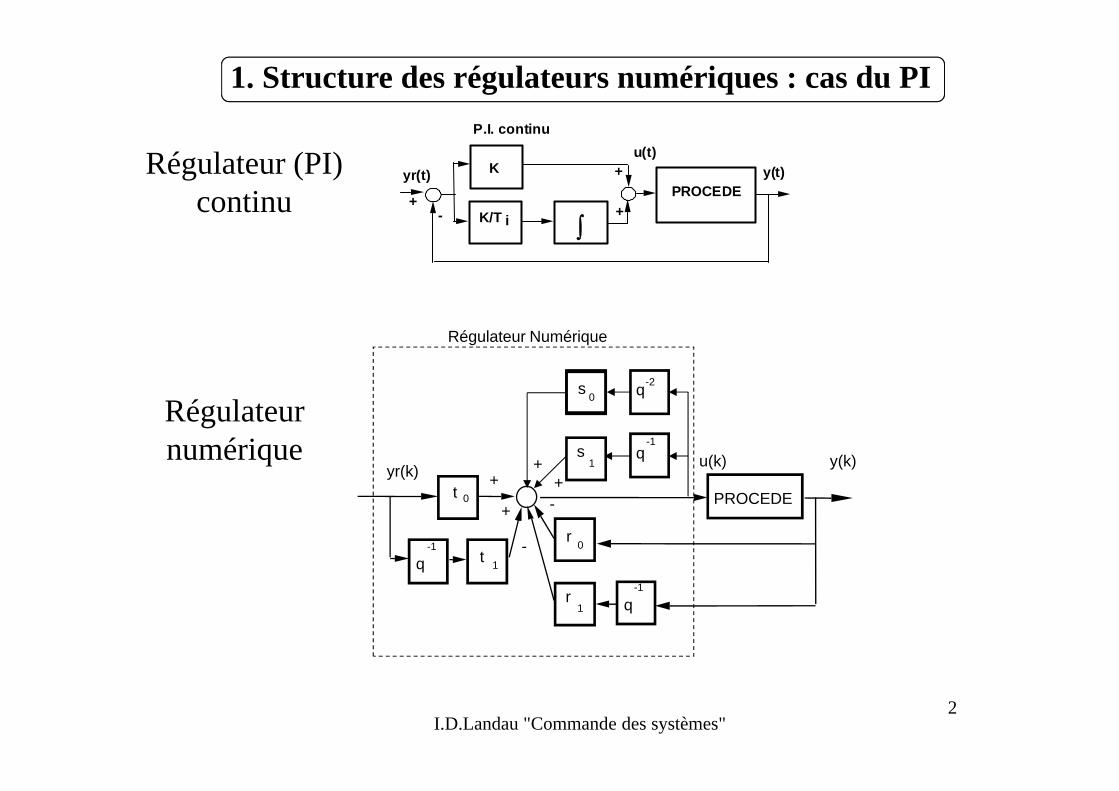
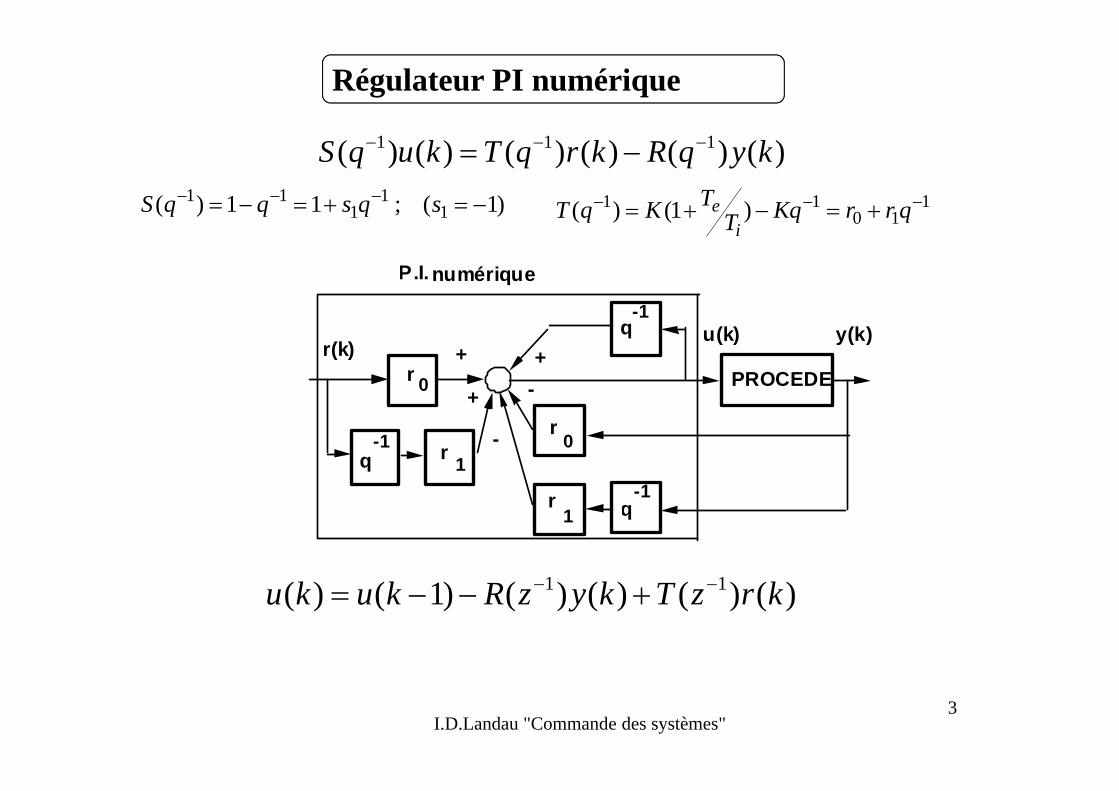
Régulateur PI numérique
)()()()()()( 111 kyqRkrqTkuqS
)1(;11)( 11
111 sqsqqS 1
1011 )1()( qrrKqT
TKqTi
e
r(k) PROCEDE
u(k) y(k)
r
r
r
r
0
1
q-1
q -1
q q -1
10
+-+
+
-
P.I. numérique
)()()()()1()( 11 krzTkyzRkuku
I.D.Landau "Commande des systèmes"4
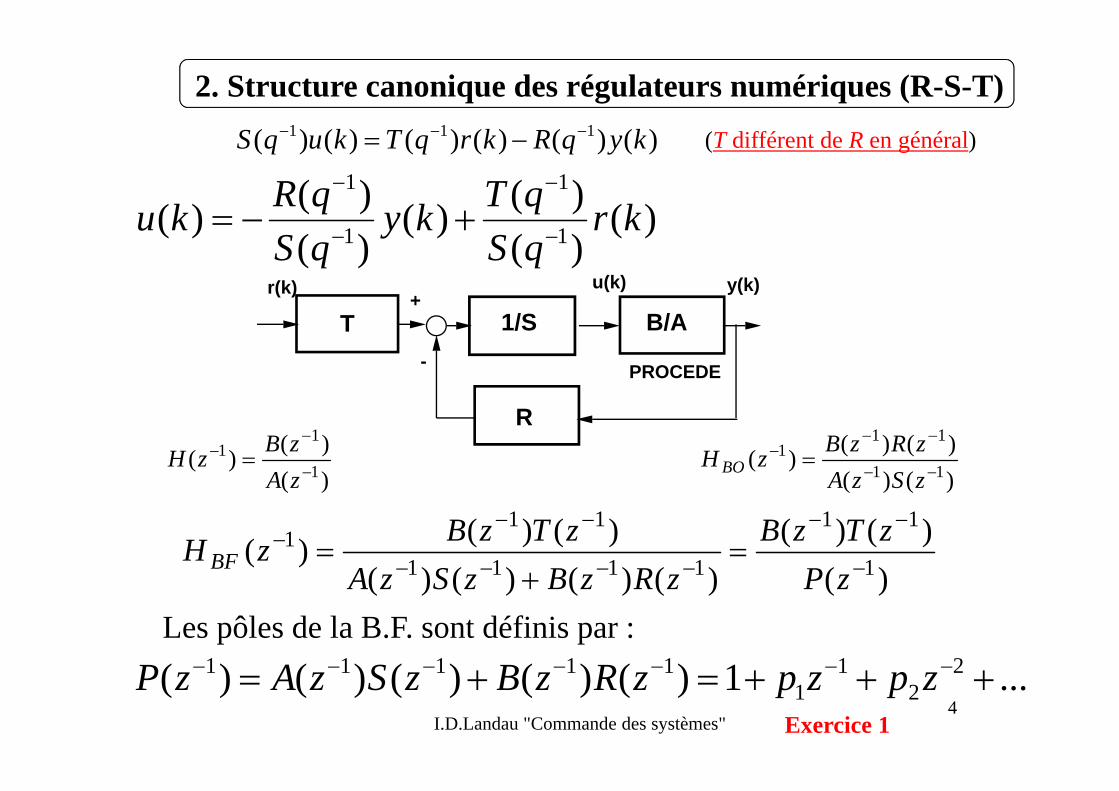
2. Structure canonique des régulateurs numériques (R-S-T))()()()()()( 111 kyqRkrqTkuqS (T différent de R en général)
)()()()(
)()()( 1
1
1
1
krqSqTky
qSqRku
)()()( 1
11
zAzBzH
)()()()()( 11
111
zSzAzRzBzH BO
)()()(
)()()()()()()( 1
11
1111
111
zPzTzB
zRzBzSzAzTzBzH BF
...1)()()()()( 22
11
11111 zpzpzRzBzSzAzPLes pôles de la B.F. sont définis par :
T
R
1/S B/A
PROCEDE
r(k) u(k) y(k)+
-
Exercice 1
I.D.Landau "Commande des systèmes" 5
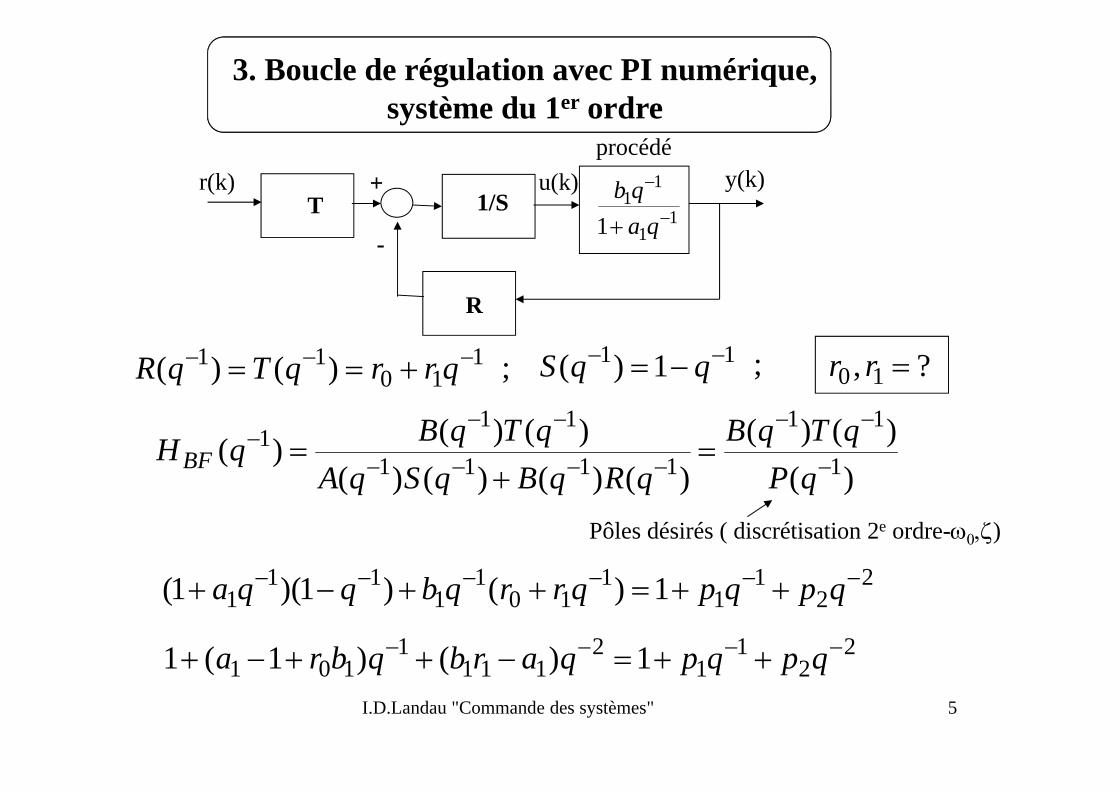
3. Boucle de régulation avec PI numérique, système du 1er ordre
11
11
1
qaqbT 1/S
R
procédé+
-
r(k) y(k)u(k)
110
11 )()( qrrqTqR 11 1)( qqS
)()()(
)()()()()()()( 1
11
1111
111
qPqTqB
qRqBqSqAqTqBqH BF
Pôles désirés ( discrétisation 2e ordre-)
22
11
110
11
111 1)()1)(1( qpqpqrrqbqqa
22
11
2111
1101 1)()1(1 qpqpqarbqbra
; ; ?, 10 rr
I.D.Landau "Commande des systèmes" 6
Boucle de régulation avec PI numérique
(suite)
2111
1101 1parb
pbra
1
121 b
apr
1
110
1bapr
Paramètres du régulateur PI numérique :
Ils dépendent des paramètres du procédé (a1, b1) et desperformances imposées (p1, p2)
Dans ce cas particulier on peut remonter au paramètres du régulateur PI continu
110
11 )1()( qrrKqTTKqT
ie
1rK 01
1
rrrT
T ei
7
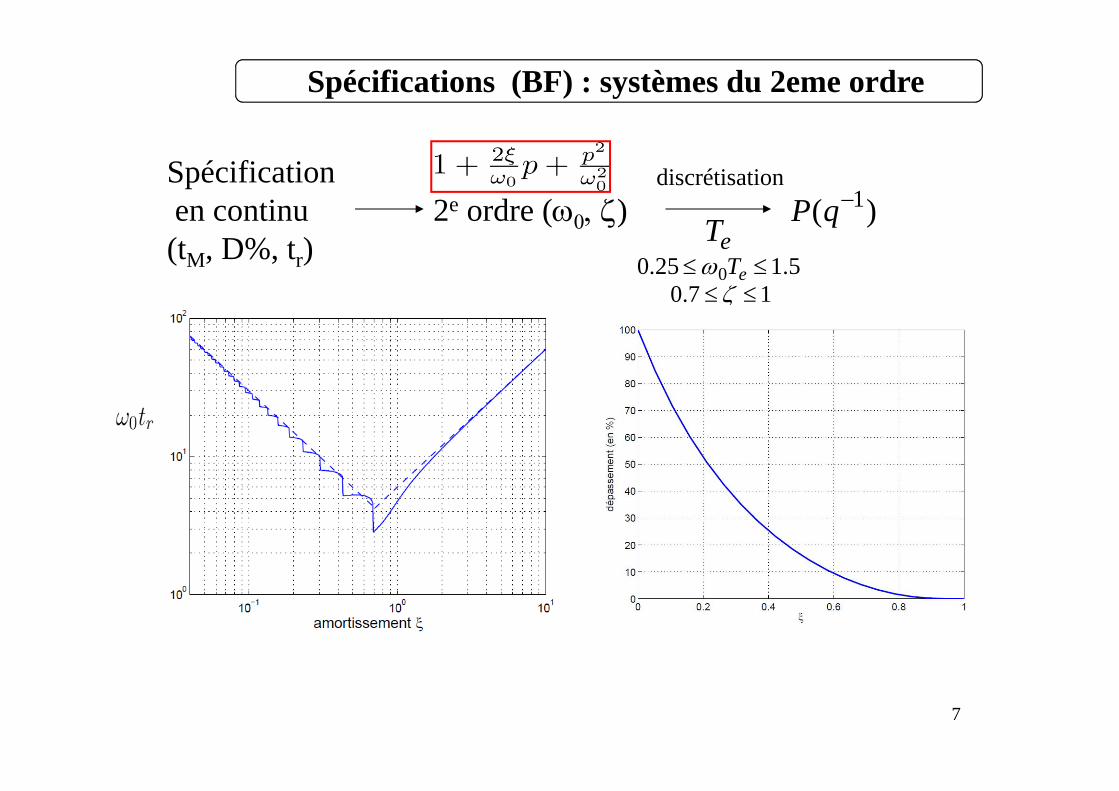
Spécificationen continu(tM, D%, tr)
2e ordre ()discrétisation
eT )( 1qP
5.125.0 0 eT17.0
Spécifications (BF) : systèmes du 2eme ordre
I.D.Landau "Commande des systèmes"
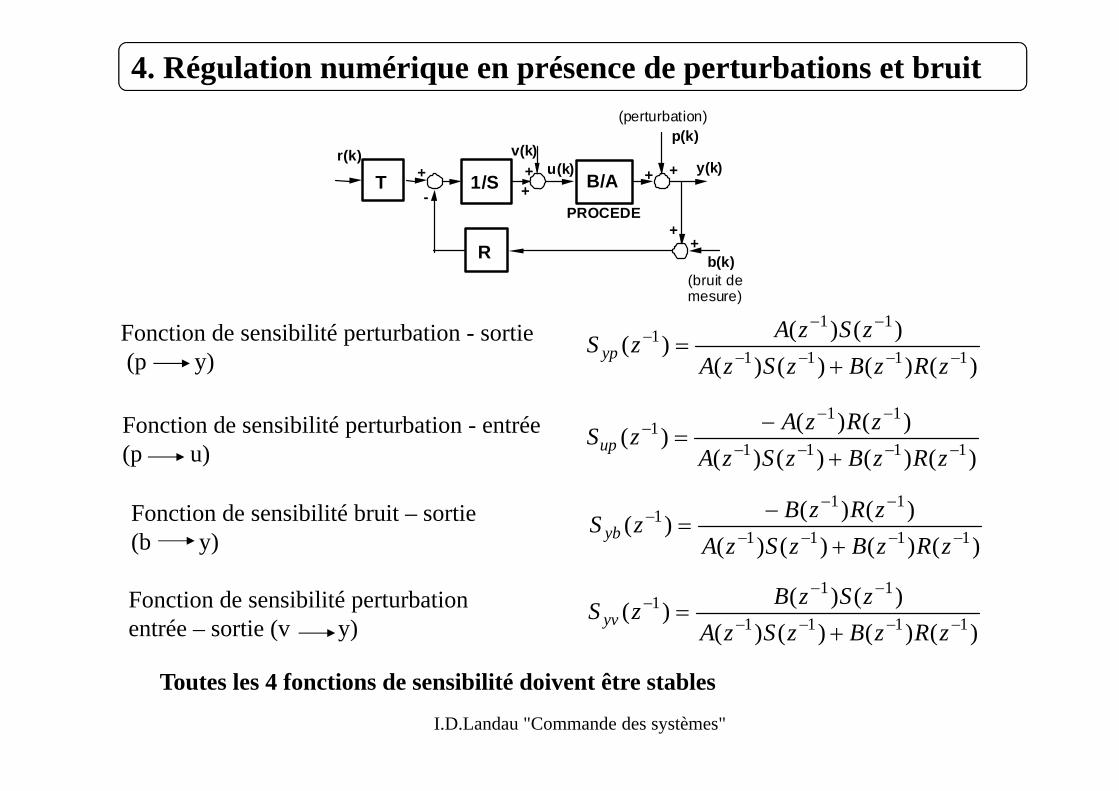
4. Régulation numérique en présence de perturbations et bruit
T
R
1/S B/A
PROCEDE
r(k)u(k) y(k)+
-
p(k)
b(k)
++
++
(perturbation)
(bruit de mesure)
v(k)++
Fonction de sensibilité perturbation - sortie(p y) )()()()(
)()()( 1111
111
zRzBzSzAzSzAzS yp
)()()()()()()( 1111
111
zRzBzSzA
zRzAzSup
)()()()()()()( 1111
111
zRzBzSzA
zRzBzS yb
)()()()()()()( 1111
111
zRzBzSzAzSzBzS yv
Fonction de sensibilité perturbation - entrée (p u)
Fonction de sensibilité bruit – sortie(b y)
Fonction de sensibilité perturbationentrée – sortie (v y)
Toutes les 4 fonctions de sensibilité doivent être stables
I.D.Landau "Commande des systèmes" 9
5. Régulateur PID numérique
• Résulte de la discrétisation du régulateur PID continu
• La méthode de calcul ne s’applique rigoureusement qu’aux:- procédés modélisables par une F.T. de maximum du 2e ordre- retard pur inférieur à une période d’échantillonnage
• La méthode de calcul est un cas particulier du placement de pôles
I.D.Landau "Commande des systèmes" 10
Régulateur PID numérique 1
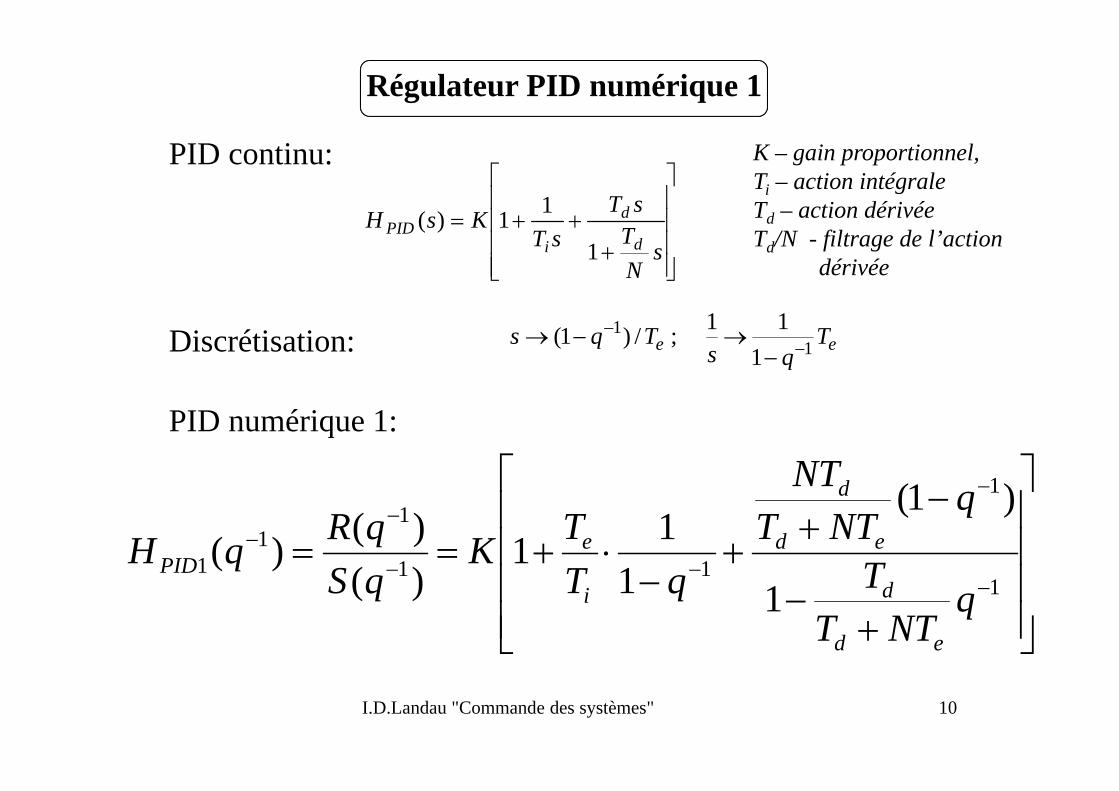
PID continu:
sNT
sTsT
KsHd
d
iPID
1
11)(
K – gain proportionnel,Ti – action intégrale Td – action dérivéeTd/N - filtrage de l’action
dérivée
Discrétisation: ee Tqs
Tqs 11
111;/)1(
1
1
11
11
1
1
)1(
111
)()()(
qNTT
T
qNTT
NT
qTTK
qSqRqH
ed
d
ed
d
i
ePID
PID numérique 1:
I.D.Landau "Commande des systèmes" 11
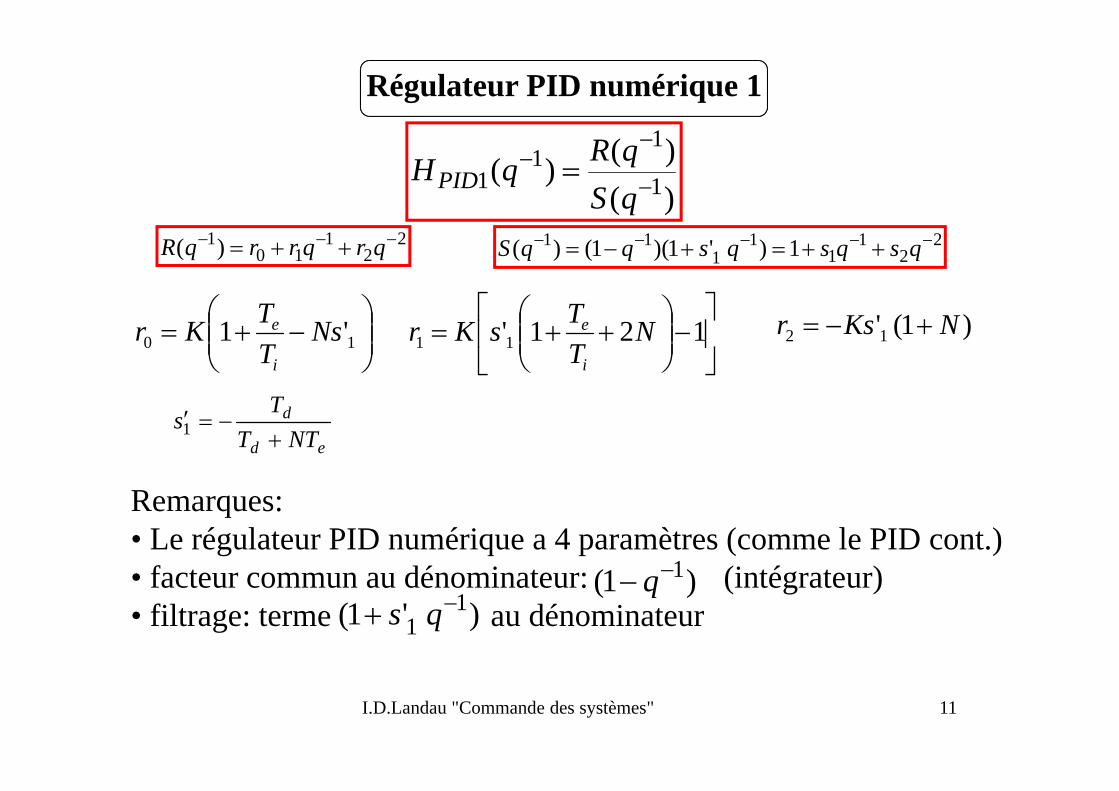
Régulateur PID numérique 1
)()()( 1
11
1
qSqRqHPID
22
110
1)( qrqrrqR 22
11
11
11 1)'1)(1()( qsqsqsqqS
ed
d
NTTT
s
1
10 '1 Ns
TTKr
i
e
121'11 N
TTsKr
i
e )1('12 NKsr
Remarques:• Le régulateur PID numérique a 4 paramètres (comme le PID cont.)• facteur commun au dénominateur: (intégrateur)• filtrage: terme au dénominateur
)1( 1 q)'1( 1
1 qs
I.D.Landau "Commande des systèmes" 12
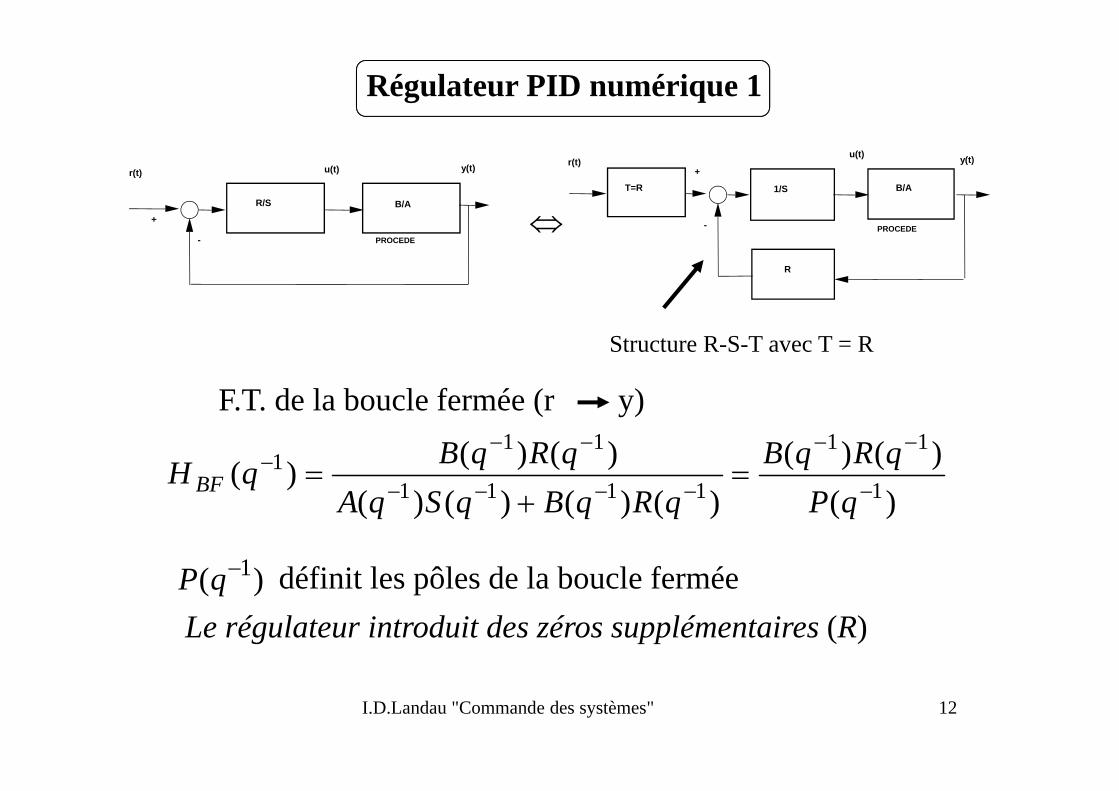
Régulateur PID numérique 1
y(t)
+
-
r(t) u(t)
R/S B/A
PROCEDE
r(t)
R
1/S B/A
PROCEDE
u(t) y(t)+
-
T=R
Structure R-S-T avec T = R
F.T. de la boucle fermée (r y)
)()()(
)()()()()()()( 1
11
1111
111
qPqRqB
qRqBqSqAqRqBqH BF
)( 1qP définit les pôles de la boucle ferméeLe régulateur introduit des zéros supplémentaires (R)
I.D.Landau "Commande des systèmes" 13
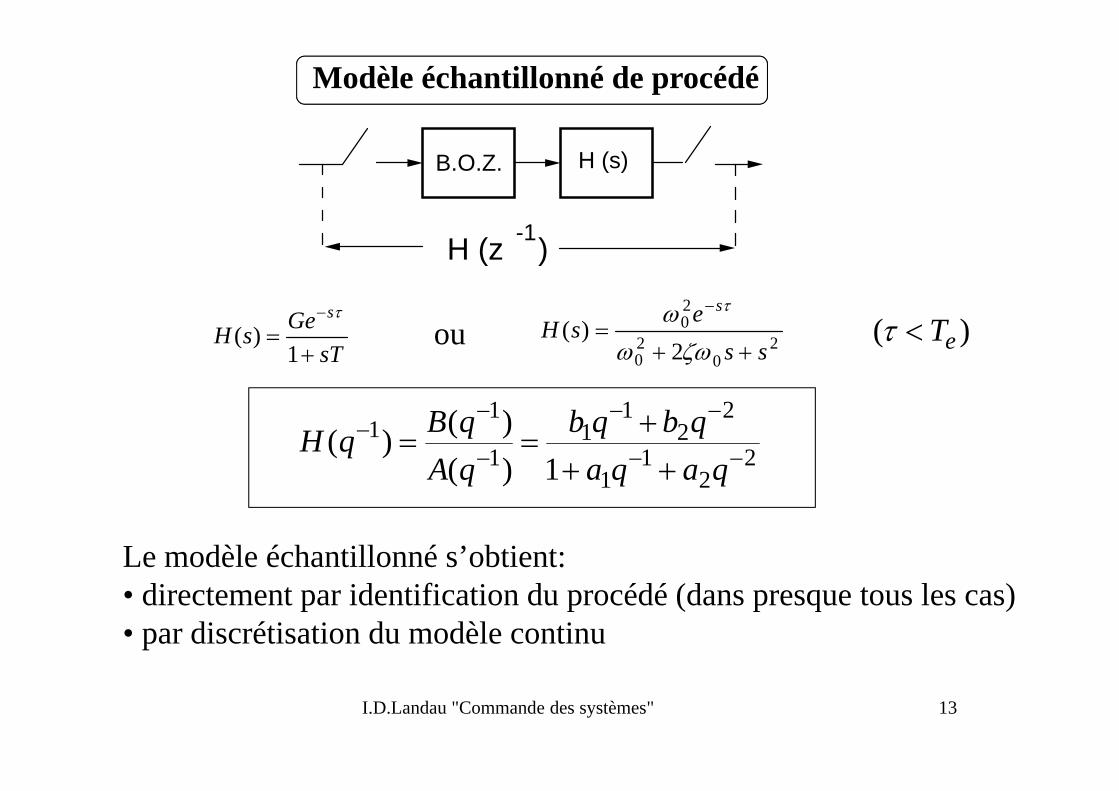
Modèle échantillonné de procédé
B.O.Z.
H (z )-1
H (s)
sTGesH
s
1)(
20
20
20
2)(
sse
sHs
ou )( eT
22
11
22
11
1
11
1)()()(
qaqa
qbqbqAqBqH
Le modèle échantillonné s’obtient:• directement par identification du procédé (dans presque tous les cas)• par discrétisation du modèle continu
I.D.Landau "Commande des systèmes" 14
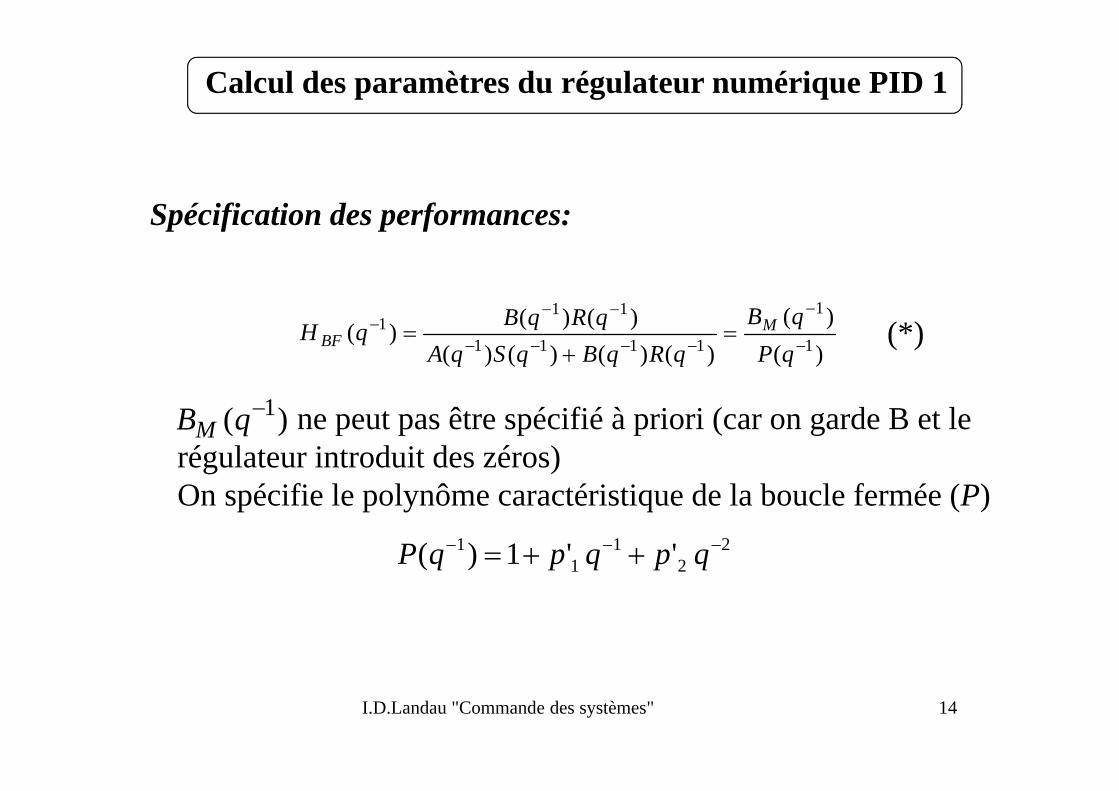
Calcul des paramètres du régulateur numérique PID 1
Spécification des performances:
)()(
)()()()()()()( 1
1
1111
111
qPqB
qRqBqSqAqRqBqH M
BF
)( 1qBM ne peut pas être spécifié à priori (car on garde B et lerégulateur introduit des zéros)On spécifie le polynôme caractéristique de la boucle fermée (P)
22
11
1 ''1)( qpqpqP
(*)
I.D.Landau "Commande des systèmes" 15
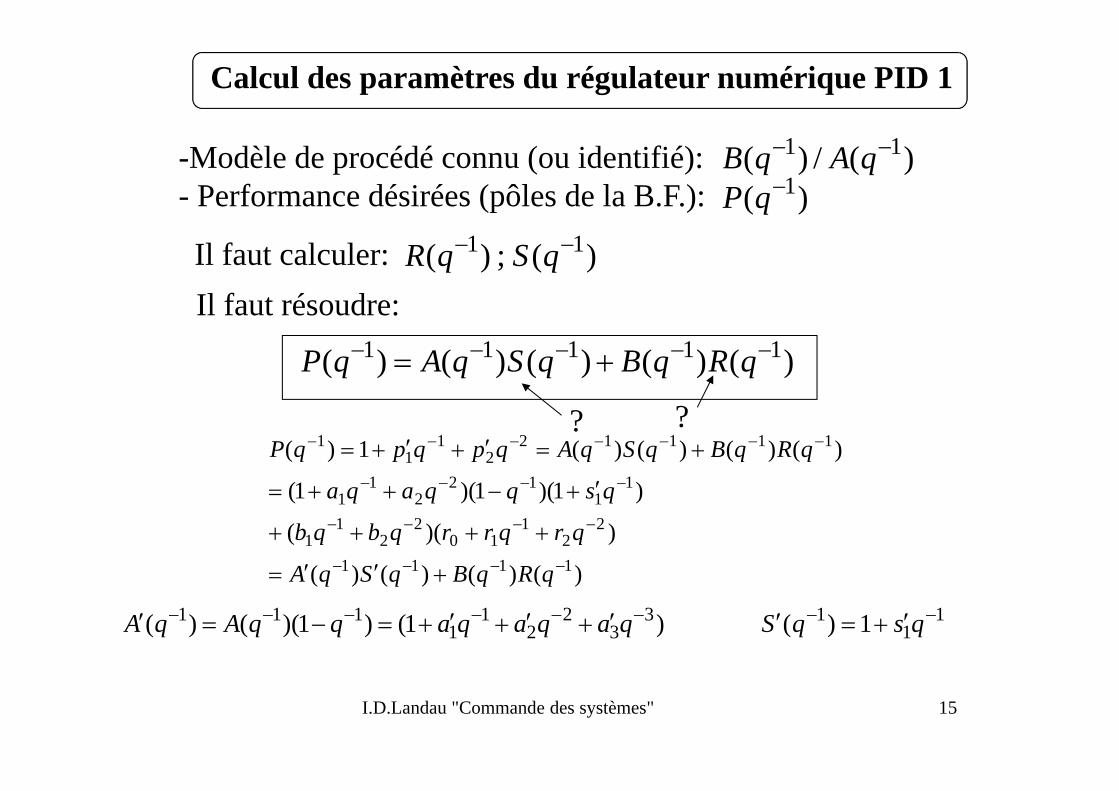
Calcul des paramètres du régulateur numérique PID 1
-Modèle de procédé connu (ou identifié):- Performance désirées (pôles de la B.F.):
)(/)( 11 qAqB)( 1qP
Il faut résoudre:Il faut calculer: )(;)( 11 qSqR
)()()()()( 11111 qRqBqSqAqP
? ?
)()()()(
))((
)1)(1)(1(
)()()()(1)(
1111
22
110
22
11
11
122
11
111122
11
1
qRqBqSqA
qrqrrqbqb
qsqqaqa
qRqBqSqAqpqpqP
)1()1)(()( 33
22
11
111 qaqaqaqqAqA 11
1 1)( qsqS
I.D.Landau "Commande des systèmes" 16
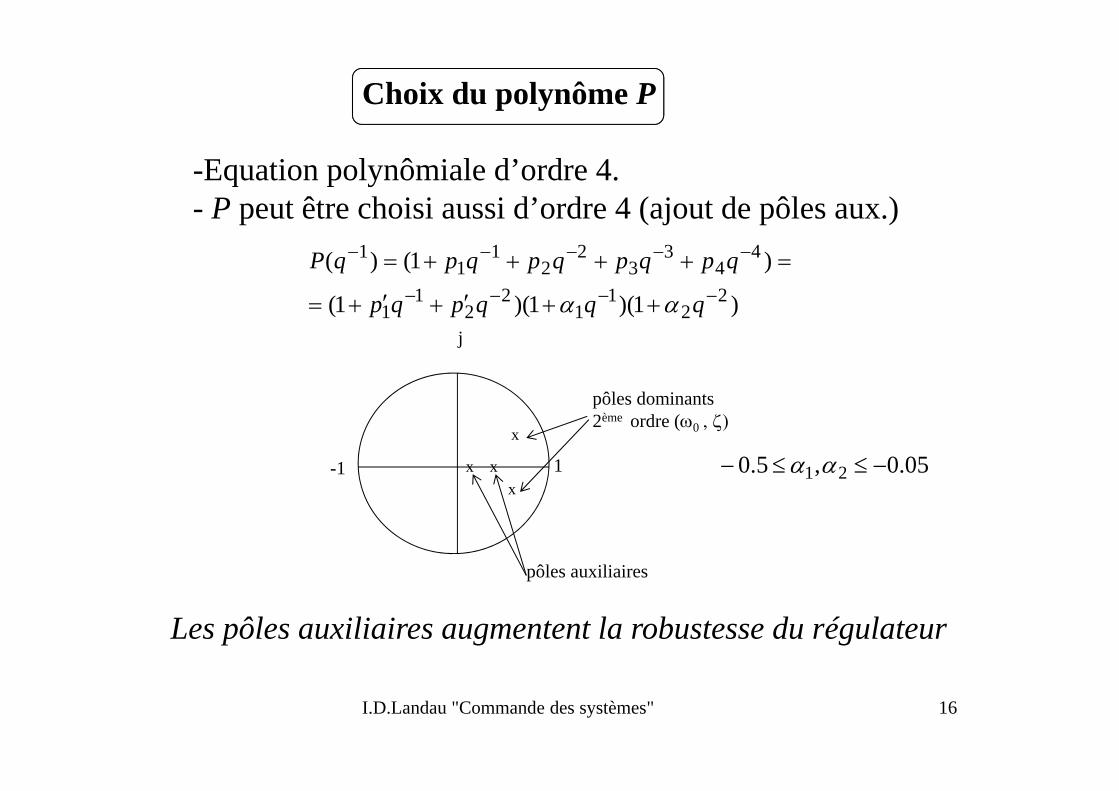
Choix du polynôme P
-Equation polynômiale d’ordre 4.- P peut être choisi aussi d’ordre 4 (ajout de pôles aux.)
)1)(1)(1(
)1()(2
21
12
21
1
44
33
22
11
1
qqqpqp
qpqpqpqpqP
x xx
x
1-1
j
pôles dominants2ème ordre (0
pôles auxiliaires
Les pôles auxiliaires augmentent la robustesse du régulateur
05.0,5.0 21
17
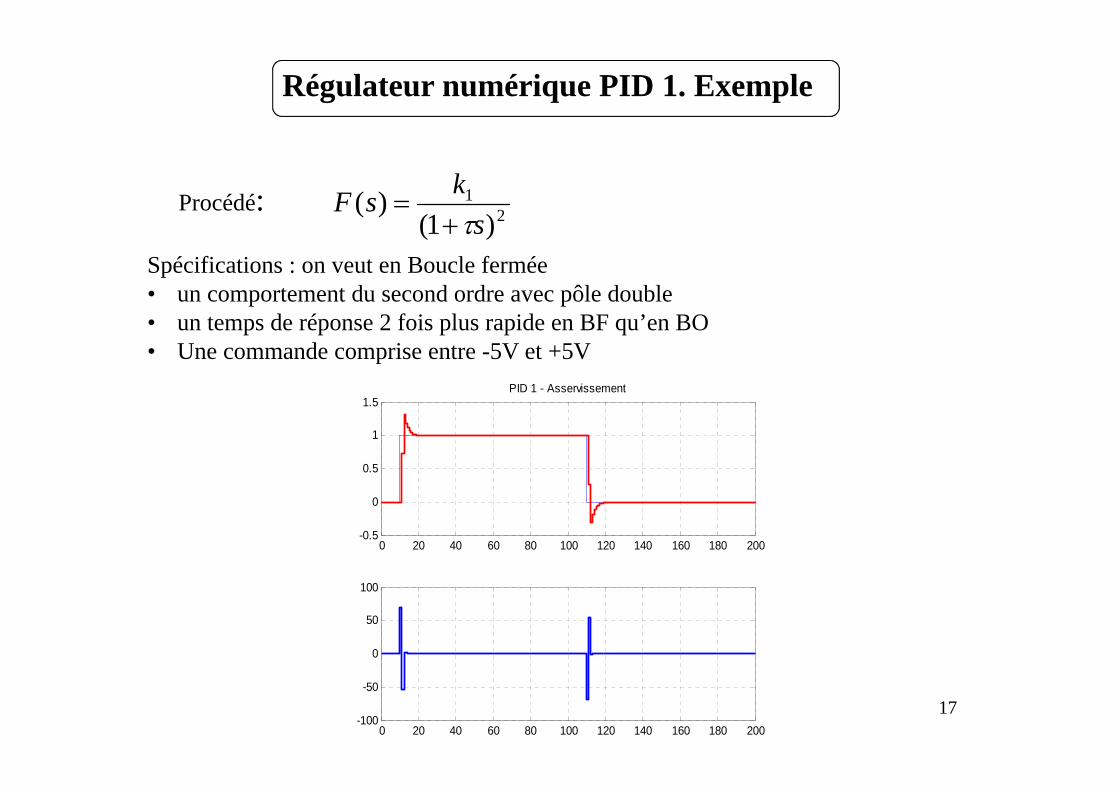
Régulateur numérique PID 1. Exemple
Procédé: 21
)1()(
sksF
0 20 40 60 80 100 120 140 160 180 200-0.5
0
0.5
1
1.5PID 1 - Asservissement
0 20 40 60 80 100 120 140 160 180 200-100
-50
0
50
100
Spécifications : on veut en Boucle fermée • un comportement du second ordre avec pôle double• un temps de réponse 2 fois plus rapide en BF qu’en BO • Une commande comprise entre -5V et +5V
I.D.Landau "Commande des systèmes" 18
Le « bon » PID numérique (PID 2)
F.T. souhaitée pour la boucle fermée:)()(
)1()1()( 1
11
qPqB
BPqH BF 1)1( BFH
N’introduit pas des zéros supplémentaires
)()()]1(/)1([
)()()()()()()( 1
1
1111
111
qPqBBP
qRqBqSqAqBqTqH BF
)1()1(
)1()1()1()1()( 1 R
BRB
BPqT R et S restent inchangés
Un seul coefficient au lieu de 2 coeff.
19
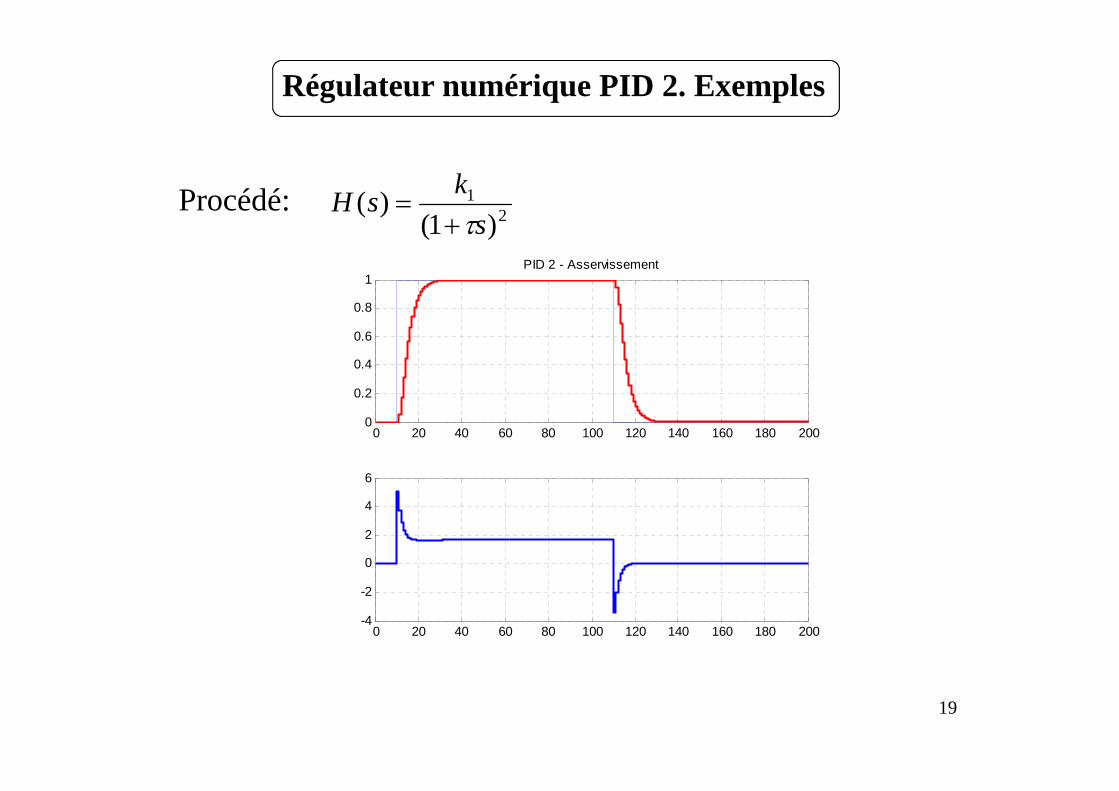
Régulateur numérique PID 2. Exemples
Procédé: 21
)1()(
sksH
0 20 40 60 80 100 120 140 160 180 2000
0.2
0.4
0.6
0.8
1PID 2 - Asservissement
0 20 40 60 80 100 120 140 160 180 200-4
-2
0
2
4
6
I.D.Landau "Commande des systèmes" 20
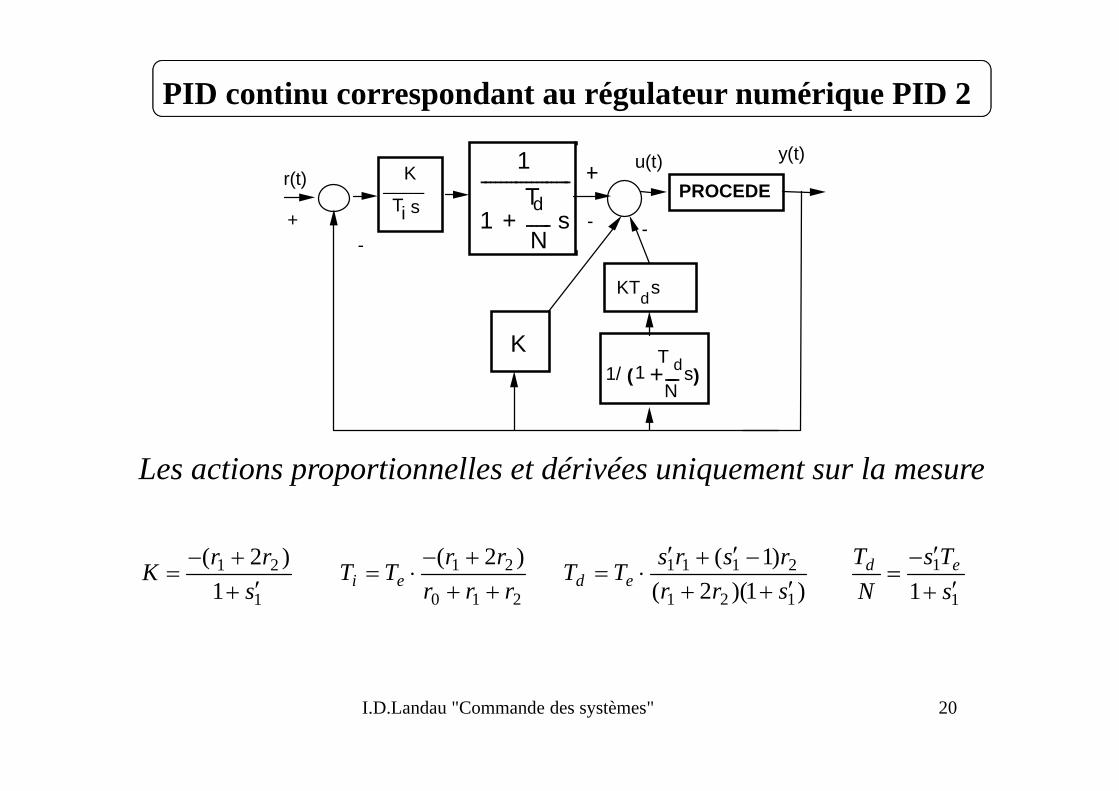
PID continu correspondant au régulateur numérique PID 2
k ds
1 + ----T
Ns
+
+-
-
PROCEDE
Kd
-
KTds
K____Ti s
r(t)u(t) y(t)
1/ ( )
------------------1
1 + -----T
Ns
d
Les actions proportionnelles et dérivées uniquement sur la mesure
1
21
1)2(
srr
K
)1)(2()1(
121
2111
srrrsrsTT ed
210
21 )2(rrr
rrTT ei
1
1
1 sTs
NT ed
I.D.Landau "Commande des systèmes" 21
Effets des pôles auxiliaires
Pour des performances identiques , les pôles auxiliaires réduisentla fonction de sensibilité Sup en hautes fréquences
Meilleure robustesse et réduction des sollicitations de l’actionneur
I.D.Landau "Commande des systèmes" 22
PID numérique: conclusions
• Structure canonique R-S-T
• PID continu équivalent si
• S’utilise pour des systèmes du 1er ou 2e ordre avec retard < Te
• Le PID numérique donne de meilleures performances pour lessystèmes avec retard (mais il n’y a plus d’équivalent continu)
• Le PID 2 conduit à une réponse en consigne avec un plus faibledépassement que le PID 1
0'1 1 s
Exercice 2
23
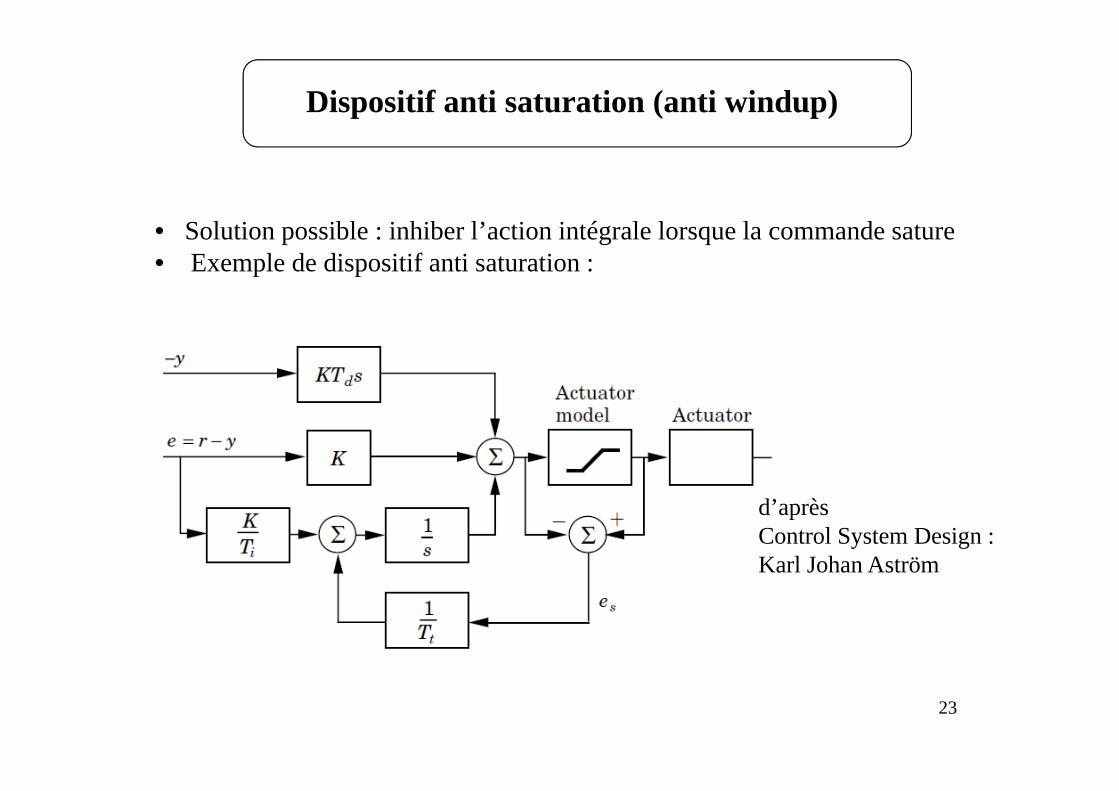
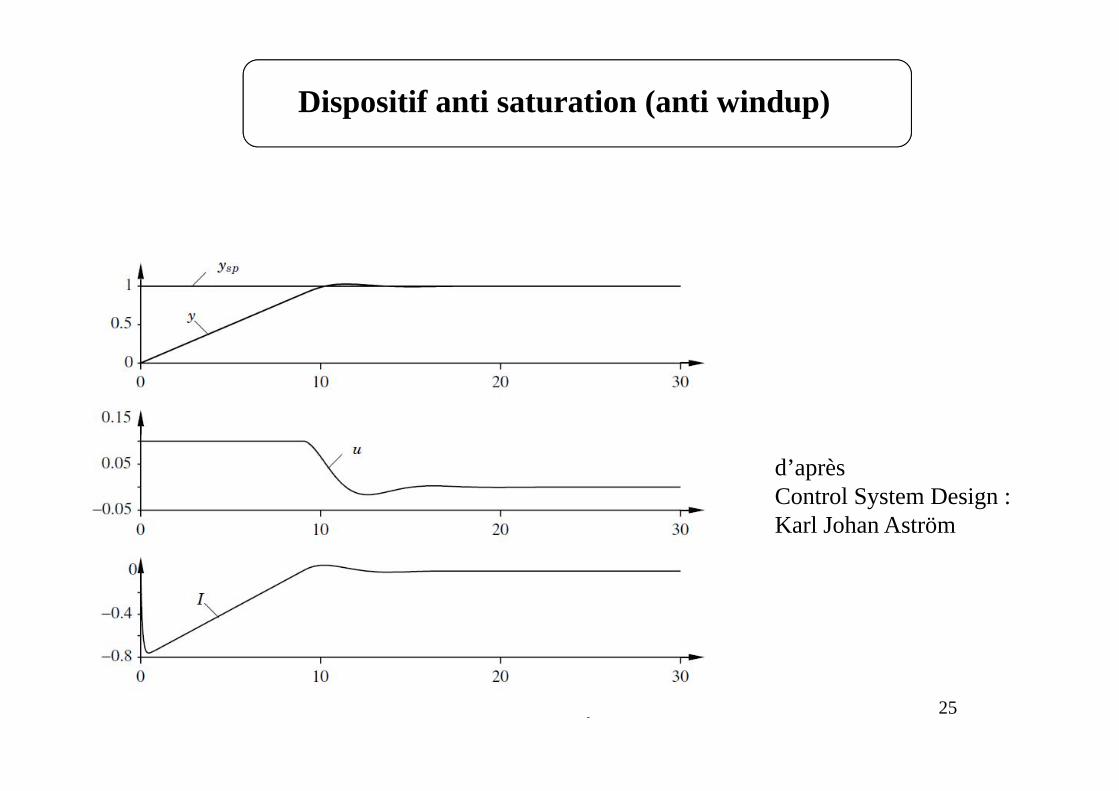
• Solution possible : inhiber l’action intégrale lorsque la commande sature• Exemple de dispositif anti saturation :
Dispositif anti saturation (anti windup)
d’après Control System Design : Karl Johan Aström
24
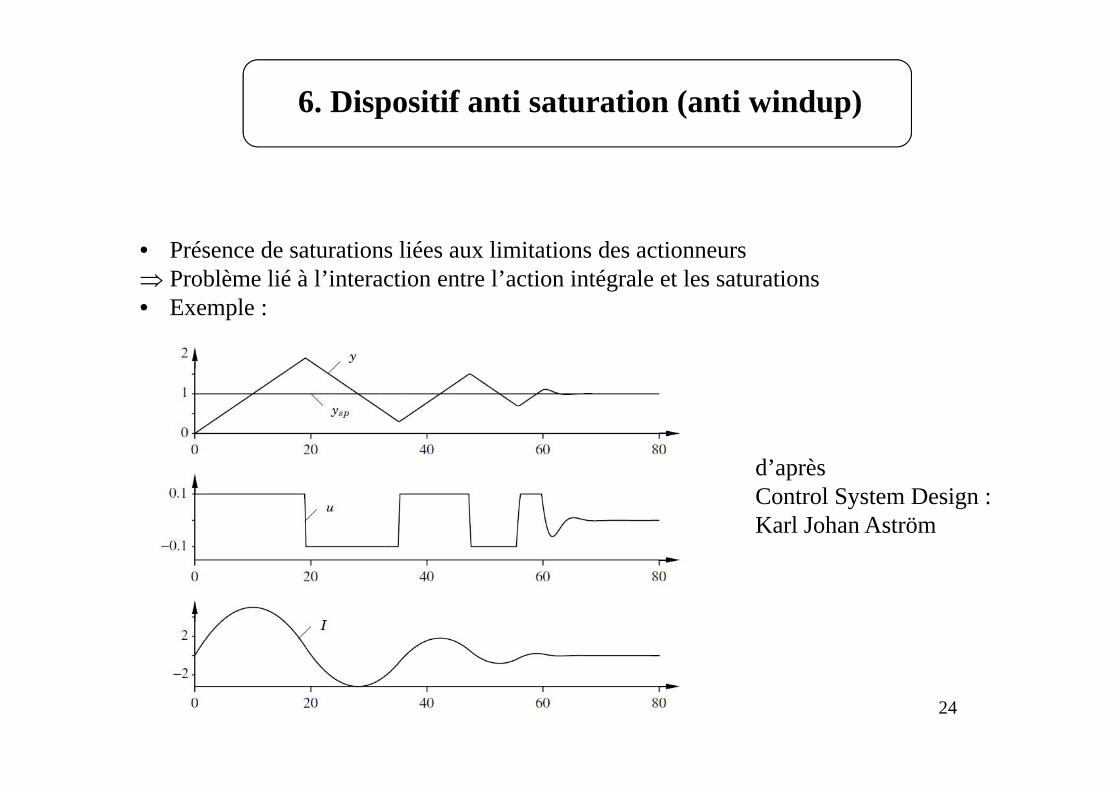
6. Dispositif anti saturation (anti windup)
• Présence de saturations liées aux limitations des actionneurs Problème lié à l’interaction entre l’action intégrale et les saturations• Exemple :
d’après Control System Design : Karl Johan Aström
I.D.Landau "Commande des systèmes" 25
Dispositif anti saturation (anti windup)
d’après Control System Design : Karl Johan Aström
I.D.Landau "Commande des systèmes" 26
7. Placement des pôles
Le placement des pôles permet de calculer un régulateur R-S-T pour:• systèmes stables ou instables• sans restriction sur les degrés des polynômes A et B• sans restriction sur le retard du procédé• sans restriction sur les zéros du procédé (stables ou instables)
•Tous les régulateurs numériques ont une structure à trois branches (R-S-T). Ils ont deux degrés de liberté (régulation et poursuite)• Le calcul du régulateur s’effectue en deux étapes :
1) R et S (régulation) 2) T (poursuite) • La complexité du régulateur dépend de la complexité du modèle• Le placement de pôles est la stratégie de base • Le PID numérique est un cas particulier du placement de pôles
utilisables pour la commande de procédés simples (ordre max. = 2)
I.D.Landau "Commande des systèmes"/Chapitre 2
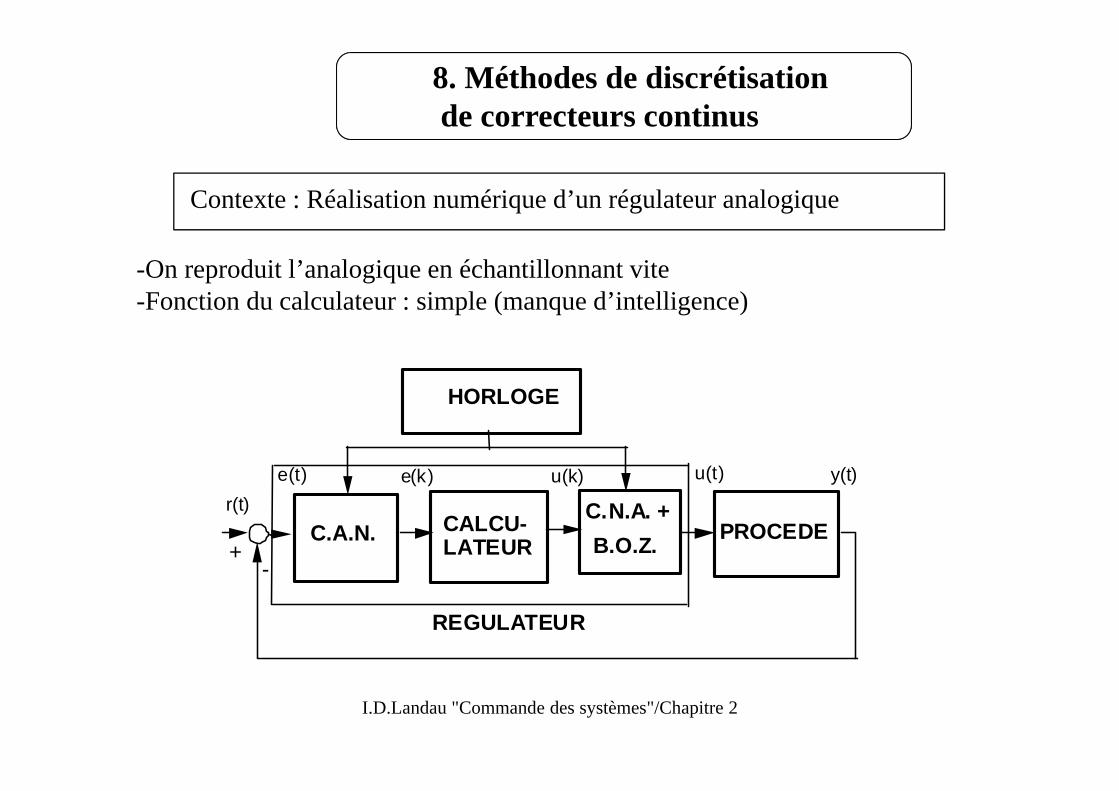
8. Méthodes de discrétisationde correcteurs continus
HORLOGE
C.A.N. CALCU- LATEUR
C.N.A. +B.O.Z. PROCEDE
REGULATEUR
u(k)e(k) e(t) u(t)
r(t)
+ -
y(t)
-On reproduit l’analogique en échantillonnant vite-Fonction du calculateur : simple (manque d’intelligence)
Contexte : Réalisation numérique d’un régulateur analogique
I.D.Landau "Commande des systèmes" 28
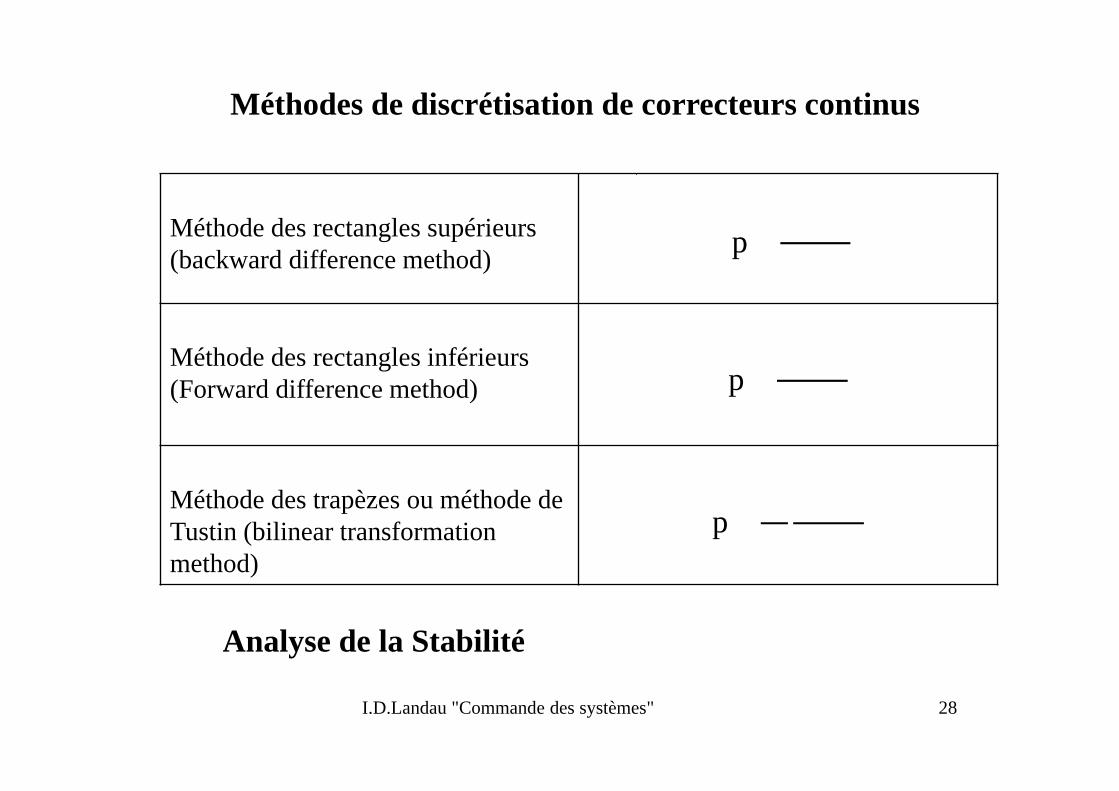
Méthode des rectangles supérieurs (backward difference method) p
Méthode des rectangles inférieurs (Forward difference method) p
Méthode des trapèzes ou méthode de Tustin (bilinear transformation method)
p
Méthodes de discrétisation de correcteurs continus
Analyse de la Stabilité