STATIQUE - thierryboulay.free.frthierryboulay.free.fr/enseignements/statique/diapo statique.pdf ·...
82
STATIQUE Statique Thierry Boulay 1 http://thierryboulay.free.fr
Transcript of STATIQUE - thierryboulay.free.frthierryboulay.free.fr/enseignements/statique/diapo statique.pdf ·...
STATIQUE
Statique Thierry Boulay 1
http://thierryboulay.free.fr
Opérations sur les vecteurs et torseursModélisation d’un mécanisme simple pour un calcul de statiqueApplication des théorèmes de la statique à un solide ou un système de solides à l’équilibre ou en mouvement à vitesse constante
Compétences validéesSavoir -faire
Vecteurs : opérations sur les vecteursSystèmes de vecteurs et torseursSystème isolé, classification des forces, loi de l’adhérence et du frottement, exemplesÉquations générales de l’équilibre. Calcul des effortsSystèmes isostatiques et hyperstatiques, systèmes isolés
solides à l’équilibre ou en mouvement à vitesse constante
Contenu pédagogique proposé
Statique Thierry Boulay 2
Systèmes isostatiques et hyperstatiques, systèmes isolésLiaisons mécaniques – Degré de libertéNotions sur les lois de l’adhérence et du frottement de roulement et de pivotement
Programme Pédagogique National du 10 août 2005 : UE3 module MECA a
Permettre aux étudiants d'appréhender un système mécanique réel, de le modéliser et d’étudier les actions qu’il exerce ou qu’il reçoit des autres systèmes pour savoir comment agir et lui redonner la fonctionnalité pour
Mes objectifs réels
Permettre aux étudiants d'appréhender un système mécanique pour en modifier le cahier des charges et lui donner une fonctionnalité supplémentaire.
systèmes pour savoir comment agir et lui redonner la fonctionnalité pour lequel il avait été prévu, en changeant, modifiant des éléments n'assurant plus leur fonction ou ayant un mode de fonctionnement dégradé.
Statique Thierry Boulay 3
Pour y parvenir…
7.5 heures de Cours Magistral
18 heures de Travaux Dirigés
9 heures de Travaux
Pratiques
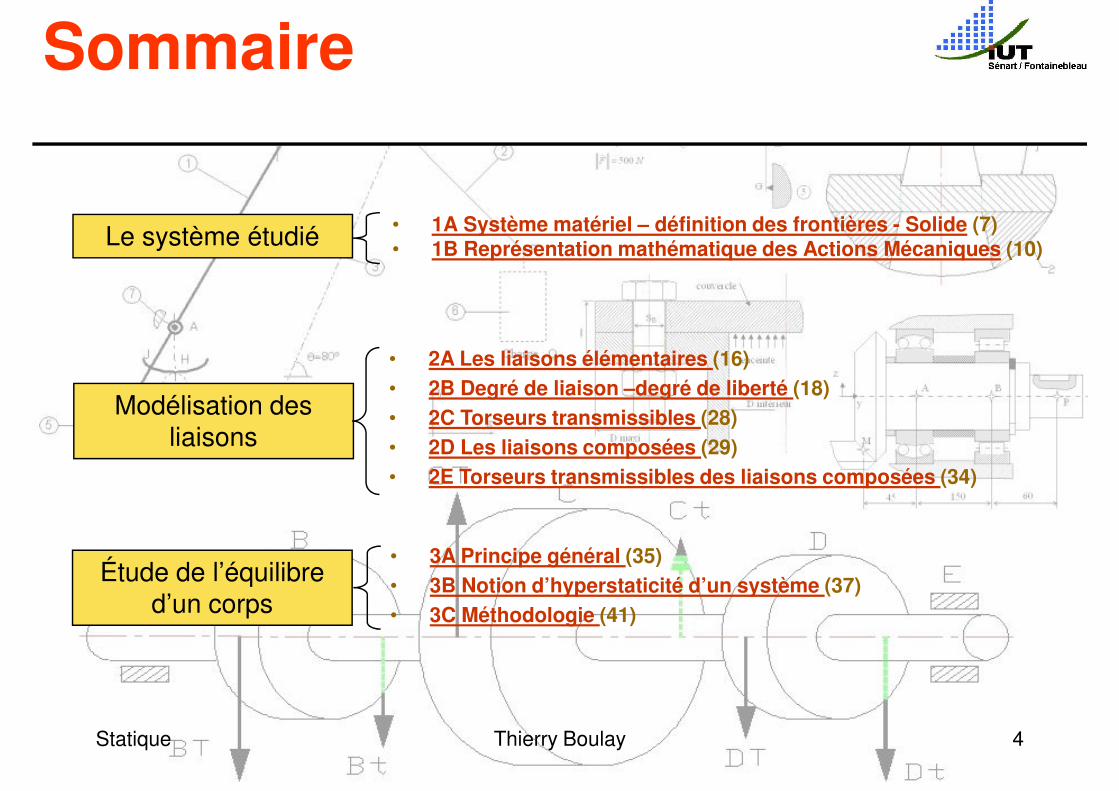
• 1A Système matériel – définition des frontières - Solide (7)• 1B Représentation mathématique des Actions Mécaniques (10)Le système étudié
Sommaire
Modélisation des liaisons
• 2A Les liaisons élémentaires (16)• 2B Degré de liaison –degré de liberté (18)• 2C Torseurs transmissibles (28)• 2D Les liaisons composées (29)• 2E Torseurs transmissibles des liaisons composées (34)
Statique Thierry Boulay 4
Étude de l’équilibre d’un corps
• 3A Principe général (35)• 3B Notion d’hyperstaticité d’un système (37)• 3C Méthodologie (41)
Sommaire
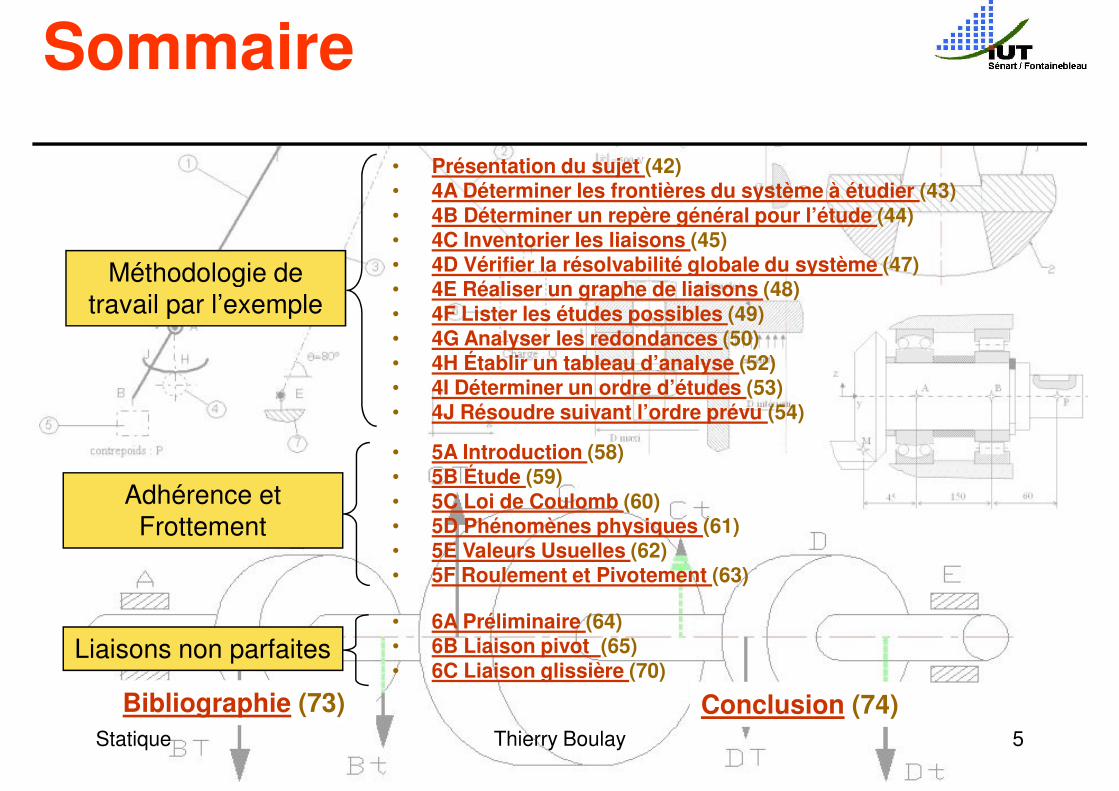
Méthodologie de
• Présentation du sujet (42)• 4A Déterminer les frontières du système à étudier (43)• 4B Déterminer un repère général pour l’étude (44)• 4C Inventorier les liaisons (45)• 4D Vérifier la résolvabilité globale du système (47)Méthodologie de
travail par l’exemple
Adhérence et Frottement
• 4D Vérifier la résolvabilité globale du système (47)• 4E Réaliser un graphe de liaisons (48)• 4F Lister les études possibles (49)• 4G Analyser les redondances (50)• 4H Établir un tableau d’analyse (52)• 4I Déterminer un ordre d’études (53)• 4J Résoudre suivant l’ordre prévu (54)
• 5A Introduction (58)• 5B Étude (59)• 5C Loi de Coulomb (60)• 5D Phénomènes physiques (61)
Statique Thierry Boulay 5
Bibliographie (73) Conclusion (74)
Frottement • 5D Phénomènes physiques (61)• 5E Valeurs Usuelles (62)• 5F Roulement et Pivotement (63)
Liaisons non parfaites• 6A Préliminaire (64)• 6B Liaison pivot (65)• 6C Liaison glissière (70)
Préliminaire
La Statique
… est la science de l’équilibre des corps au repos.
La Cinématique
La Dynamique
… est la science de l’équilibre des corps en mouvement sans tenir compte des « causes ».
Statique Thierry Boulay 6
… est la science de l’équilibre des corps en mouvement en tenant compte des effets qui les produisent ou qui les perturbent.
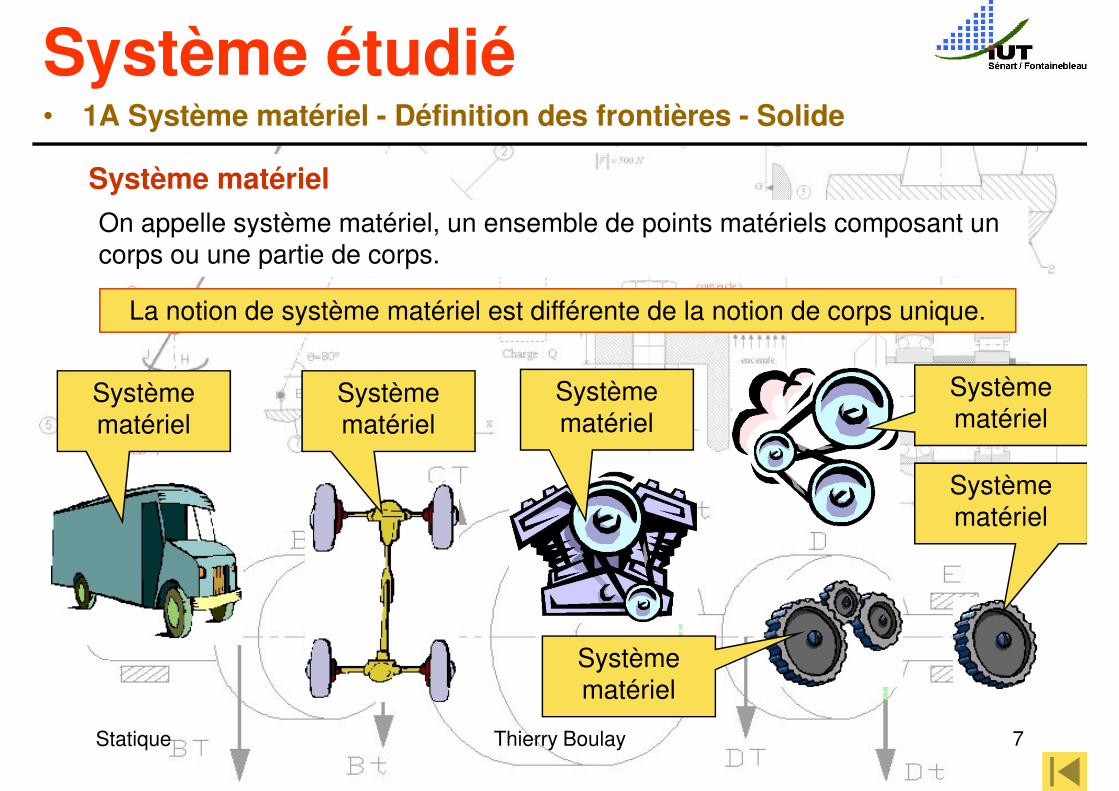
Système étudié• 1A Système matériel - Définition des frontières - Solide
Système matériel
On appelle système matériel, un ensemble de points matériels composant un corps ou une partie de corps.corps ou une partie de corps.
La notion de système matériel est différente de la notion de corps unique.
Système matériel
Système matériel
Système matériel
Système matériel
Système matériel
Statique Thierry Boulay 7
Système matériel
matériel

Système étudié• 1A Système matériel - Définition des frontières - Solide
Définition des frontières
Le choix d’un système matériel est donc arbitraire et sa délimitation est laissée à l’appréciation du responsable de l’affaire. Les surfaces limitant le système à l’appréciation du responsable de l’affaire. Les surfaces limitant le système matériel isolé du « monde extérieur » sont appelées : FRONTIERES
En revanche, quand cette frontière est précisée, elle doit rester identique pendant toute la durée de l’étude.
Choix du responsable
Système matériel Système
étudié
Statique Thierry Boulay 8
Système étudié• 1A Système matériel - Définition des frontières - Solide
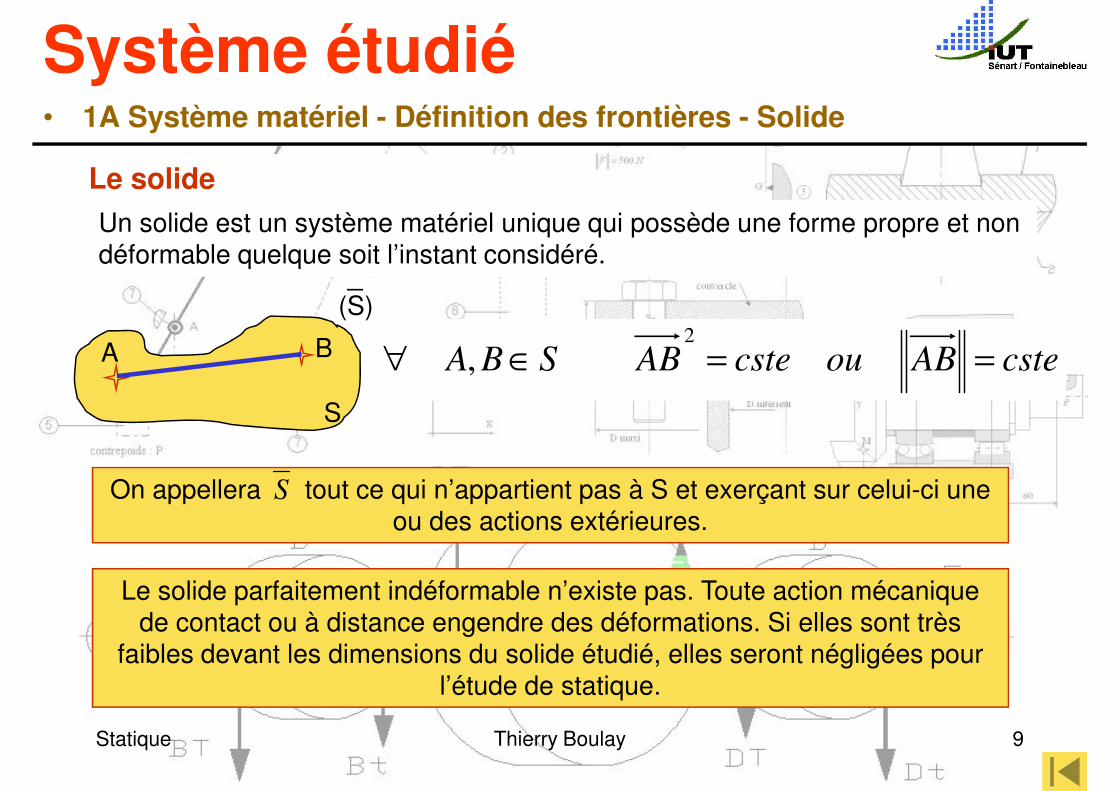
Le solide
Un solide est un système matériel unique qui possède une forme propre et non déformable quelque soit l’instant considéré.déformable quelque soit l’instant considéré.
On appellera tout ce qui n’appartient pas à S et exerçant sur celui-ci une ou des actions extérieures.
S
S
A B
(S)
csteABoucsteABSBA ==∈∀2
,
Statique Thierry Boulay 9
ou des actions extérieures.
Le solide parfaitement indéformable n’existe pas. Toute action mécanique de contact ou à distance engendre des déformations. Si elles sont très
faibles devant les dimensions du solide étudié, elles seront négligées pour l’étude de statique.
Système étudié• 1B Représentation mathématique des Actions Mécaniques
Définition
On appelle Action Mécanique toute cause susceptible de maintenir un corps au repos, ou créer un mouvement, ou de le déformer.repos, ou créer un mouvement, ou de le déformer.
Classification des Actions Mécaniques
Elles sont de deux sortes :
• Les Actions Mécaniques à distance :
� Champ de pesanteur,
� Champ électromagnétique…
Statique Thierry Boulay 10
• Les Actions Mécaniques de contact :
� Liaisons surfaciques,
� Liaisons linéaires…
Système étudié• 1B Représentation mathématique des Actions Mécaniques
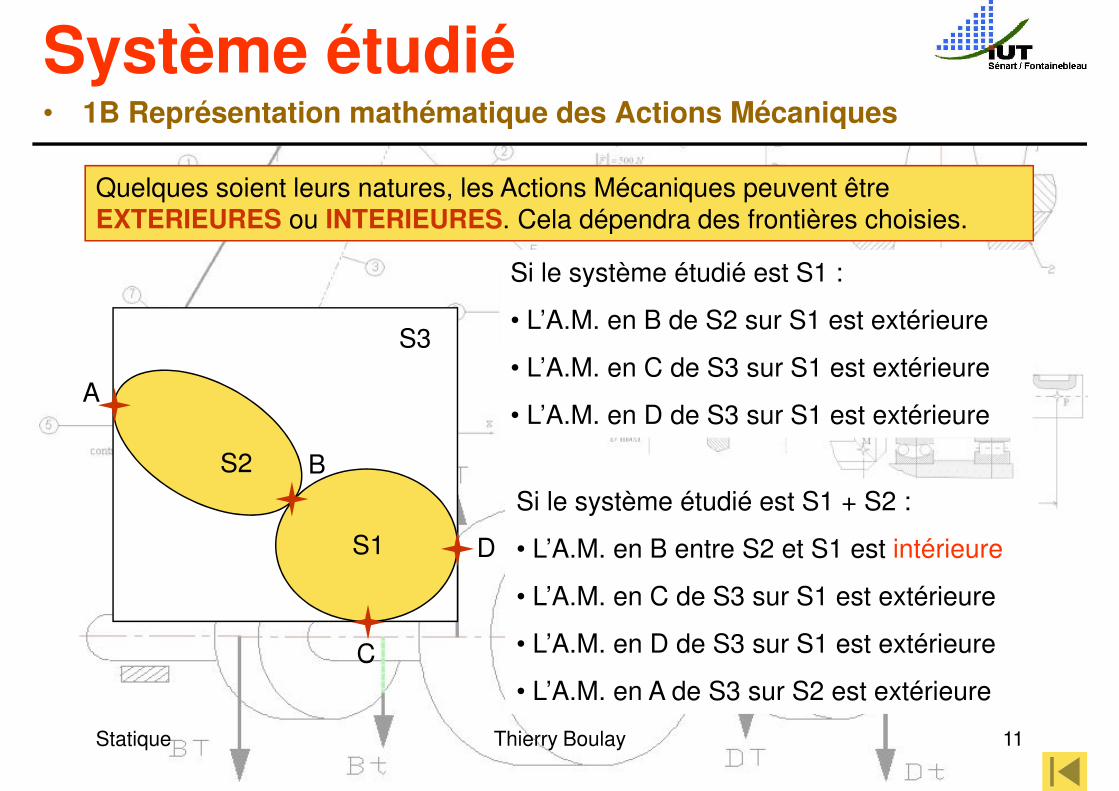
Quelques soient leurs natures, les Actions Mécaniques peuvent être EXTERIEURES ou INTERIEURES. Cela dépendra des frontières choisies.
Si le système étudié est S1 :
S2
S3
Si le système étudié est S1 :
• L’A.M. en B de S2 sur S1 est extérieure
• L’A.M. en C de S3 sur S1 est extérieure
• L’A.M. en D de S3 sur S1 est extérieureA
BSi le système étudié est S1 + S2 :
Statique Thierry Boulay 11
S1
C
D • L’A.M. en B entre S2 et S1 est intérieure
• L’A.M. en C de S3 sur S1 est extérieure
• L’A.M. en D de S3 sur S1 est extérieure
• L’A.M. en A de S3 sur S2 est extérieure
Une Force est une A.M. représentée par un vecteur lié Une Force est une A.M. représentée par un vecteur lié
Système étudié• 1B Représentation mathématique des Actions Mécaniques
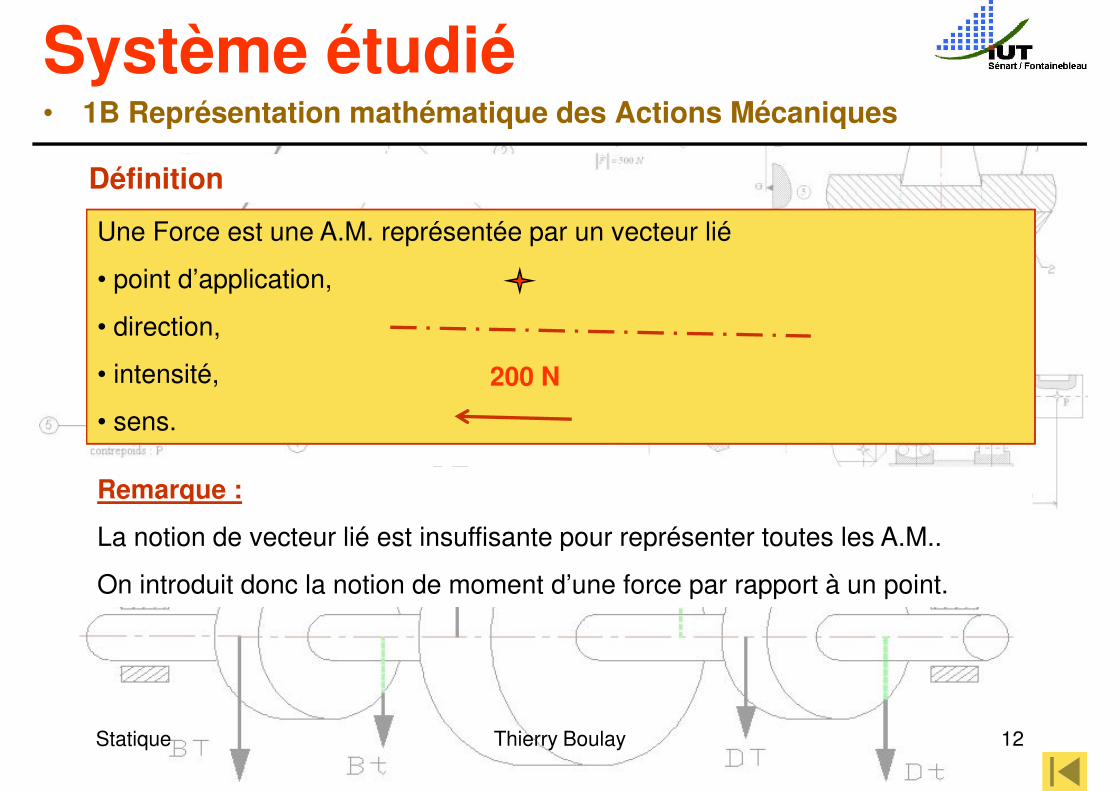
Une Force est une A.M. représentée par un vecteur lié
Définition
• point d’application,
• direction,
• intensité,
• sens.
• point d’application,
• direction,
• intensité,
• sens.
• point d’application,
• direction,
• intensité,
• sens.
Remarque :
La notion de vecteur lié est insuffisante pour représenter toutes les A.M..
200 N
Statique Thierry Boulay 12
La notion de vecteur lié est insuffisante pour représenter toutes les A.M..
On introduit donc la notion de moment d’une force par rapport à un point.
Système étudié• 1B Représentation mathématique des Actions Mécaniques
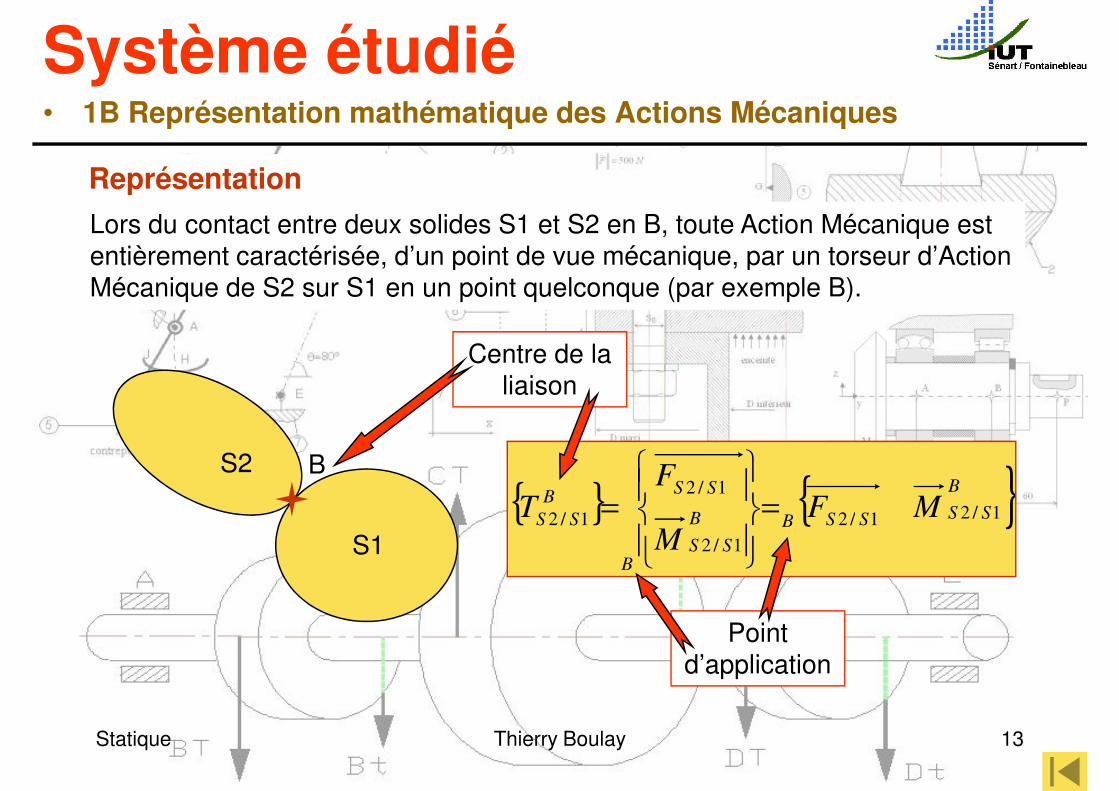
Lors du contact entre deux solides S1 et S2 en B, toute Action Mécanique est entièrement caractérisée, d’un point de vue mécanique, par un torseur d’Action
Représentation
entièrement caractérisée, d’un point de vue mécanique, par un torseur d’Action Mécanique de S2 sur S1 en un point quelconque (par exemple B).
S2 B
{ } { }B
SSSSBB
SSB
SS MFM
FT 1/21/2
1/2
1/2 =
=
Centre de la liaison
Statique Thierry Boulay 13
Point d’application
S1{ } { }
SSBB
SSB
SS
M1/2
1/2
1/2
Système étudié• 1B Représentation mathématique des Actions Mécaniques
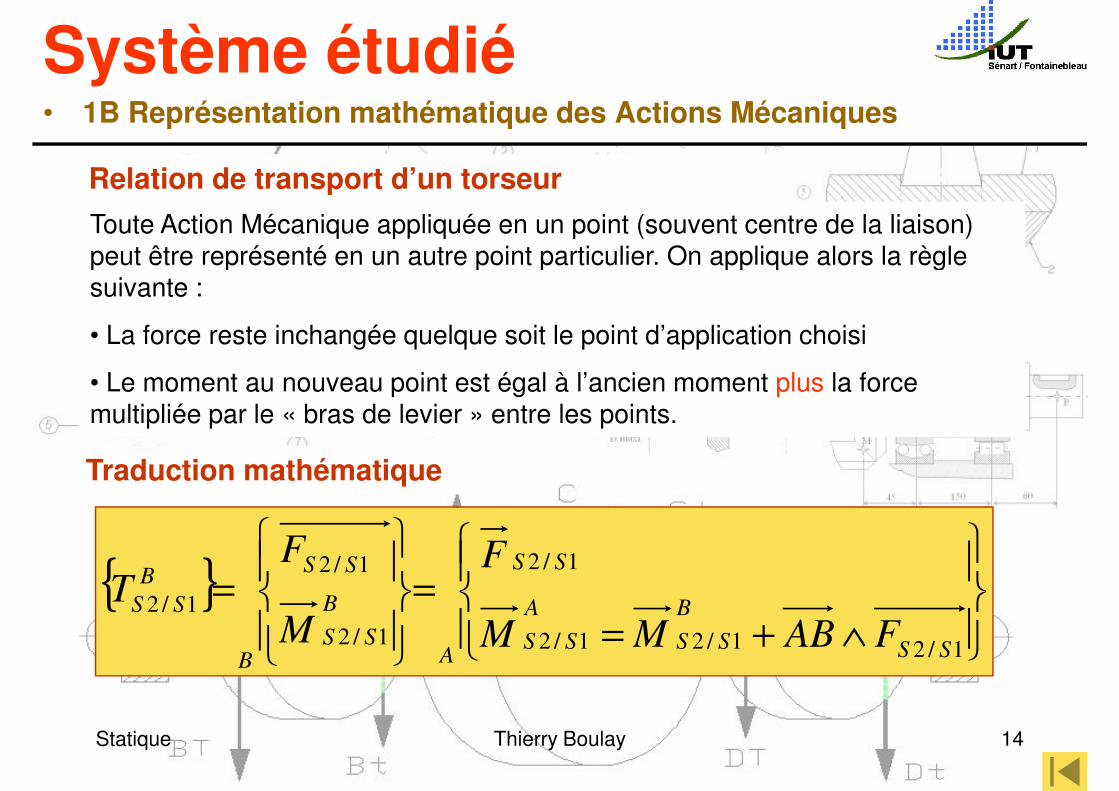
Toute Action Mécanique appliquée en un point (souvent centre de la liaison) peut être représenté en un autre point particulier. On applique alors la règle
Relation de transport d’un torseur
peut être représenté en un autre point particulier. On applique alors la règle suivante :
• La force reste inchangée quelque soit le point d’application choisi
• Le moment au nouveau point est égal à l’ancien moment plus la force multipliée par le « bras de levier » entre les points.
Traduction mathématique
F
Statique Thierry Boulay 14
{ }
∧+==
=
1/21/21/2
1/2
1/2
1/2
1/2
SS
B
SS
A
SS
SS
A
B
SS
SS
B
B
SS
FABMM
F
M
FT

Système étudié• 1B Représentation mathématique des Actions Mécaniques
Dans le Système International,
• La force est en Newton (N)
Unités de forces et de moments
• La force est en Newton (N)
• Le moment est en Newton mètre (Nm)
A noter :
1N/mm² = 1MPa
Ne pas confondre Nm et mN
Statique Thierry Boulay 15
Isaac Newton : Anglais [1642-1727] ; découverte des lois de l’attraction universelle en 1687 ; inventeur du télescope en 1672
Modélisation des liaisons• 2A Les liaisons élémentaires
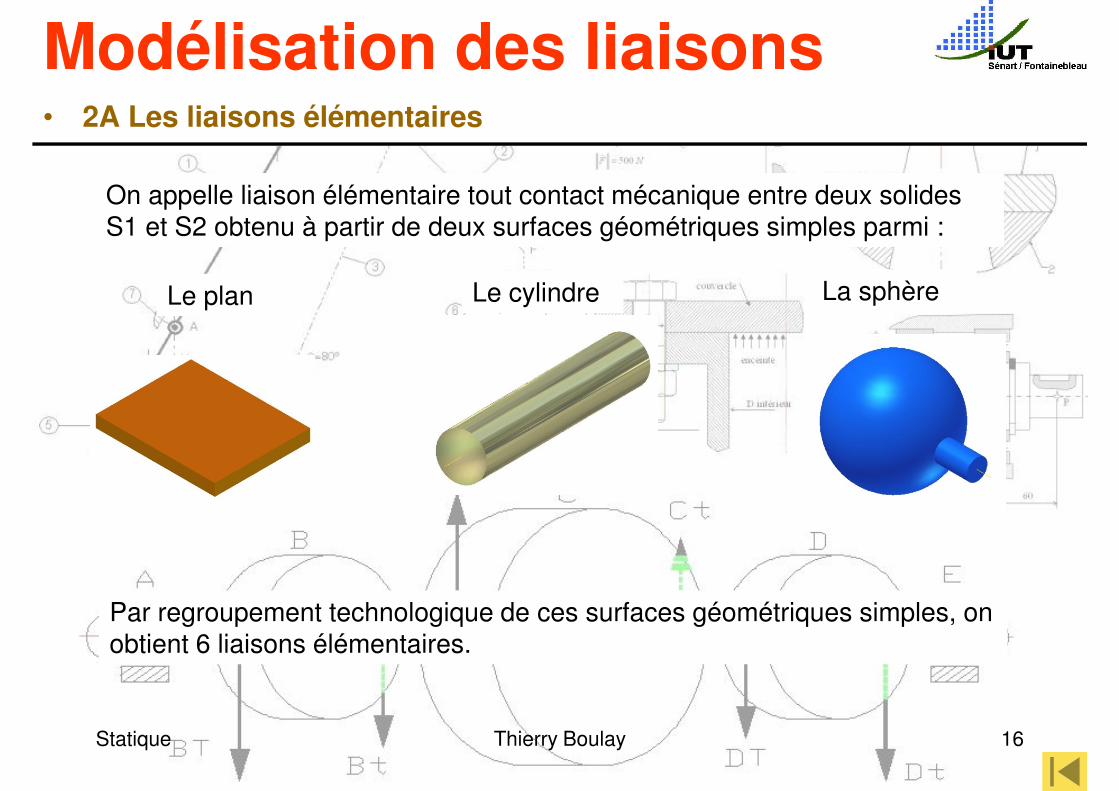
On appelle liaison élémentaire tout contact mécanique entre deux solides S1 et S2 obtenu à partir de deux surfaces géométriques simples parmi :
Le plan Le cylindre La sphère
Statique Thierry Boulay 16
Par regroupement technologique de ces surfaces géométriques simples, on obtient 6 liaisons élémentaires.
Modélisation des liaisons• 2A Les liaisons élémentaires
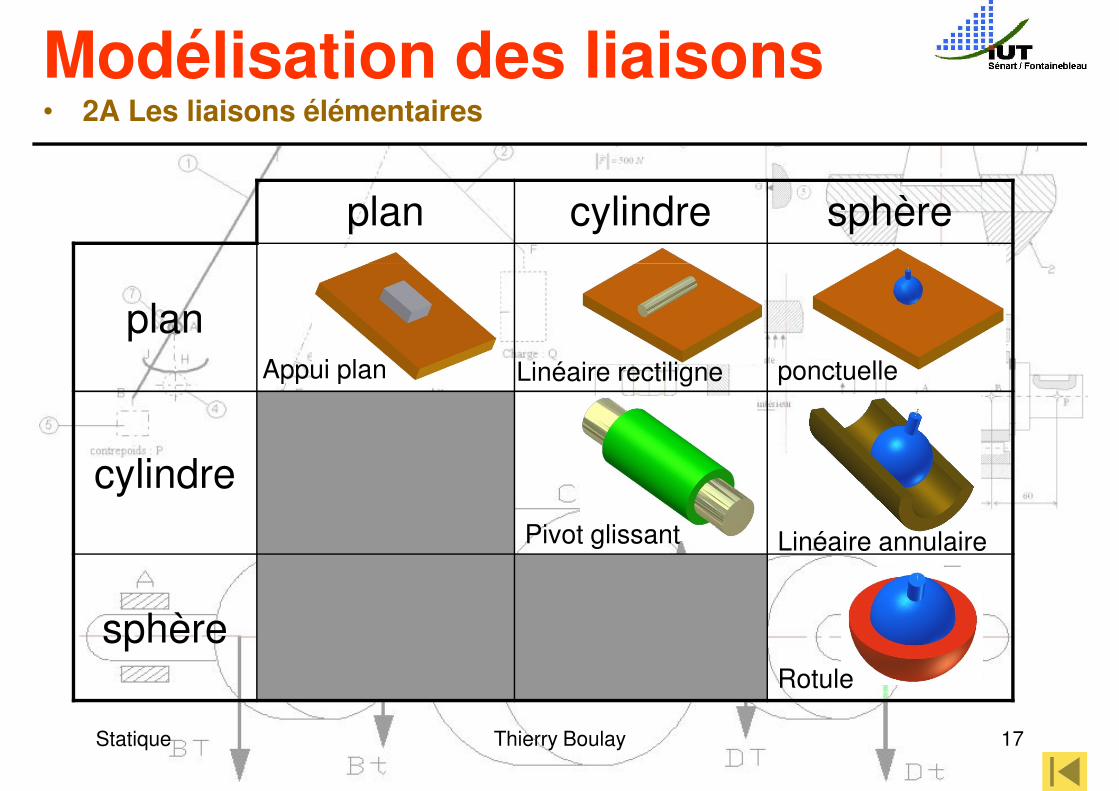
plan cylindre sphère
plan
cylindre
Appui plan Linéaire rectiligne ponctuelle
Pivot glissant Linéaire annulaire
Statique Thierry Boulay 17
sphère
Pivot glissant Linéaire annulaire
Rotule
Modélisation des liaisons• 2B Degré de liaison – Degré de liberté
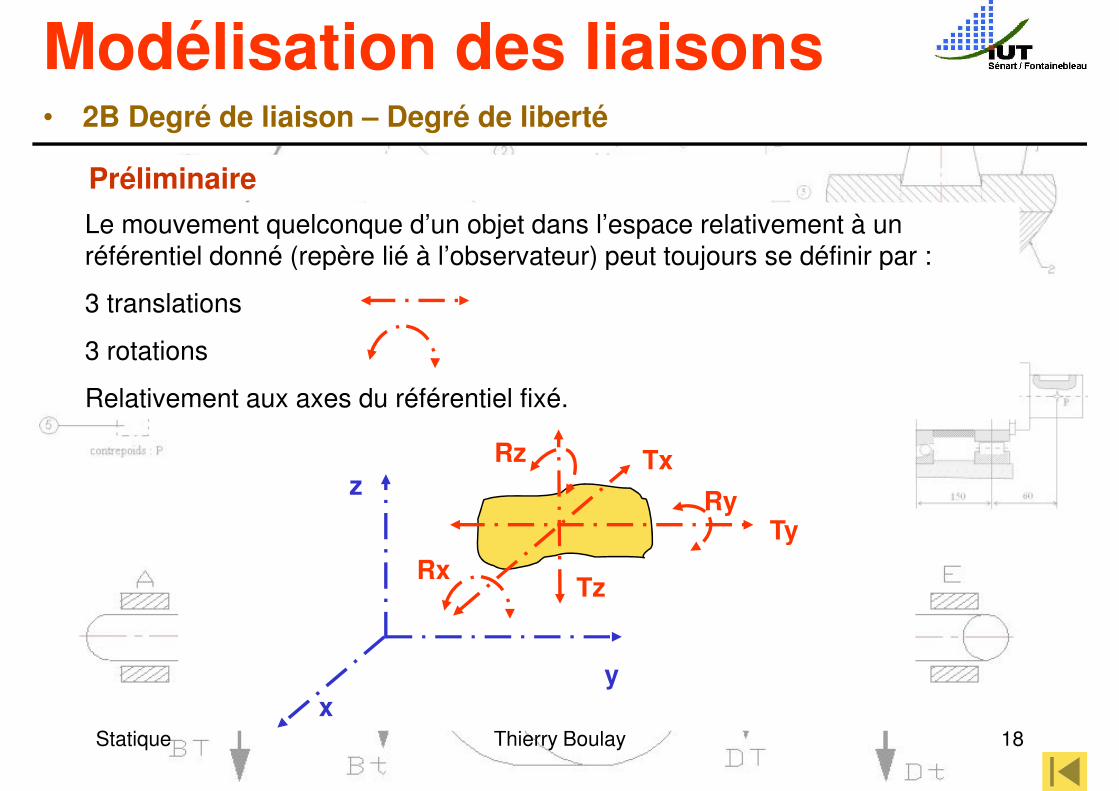
Préliminaire
Le mouvement quelconque d’un objet dans l’espace relativement à un référentiel donné (repère lié à l’observateur) peut toujours se définir par :référentiel donné (repère lié à l’observateur) peut toujours se définir par :
3 translations
3 rotations
Relativement aux axes du référentiel fixé.
Rz Tx
TyRy
z
Statique Thierry Boulay 18
TzRx
Ty
xy

Modélisation des liaisons• 2B Degré de liaison – Degré de liberté
Angles d’Euler
Les 3 translations permettent de positionner le second repère par rapport au premier.premier.
Les 3 rotations se font respectivement autour de z0 ; x1 puis z3.
Z0
z0
y0Tz
y1
z3
y2
θ
Rotation autour de z0 : angle de précession
x0y0z0
Rotation autour de x1 : angle de nutation
x1y1z0
x1y1z0
x1y2z3
ψ
y3
x3
Statique Thierry Boulay 19
X0
Y0x0
Tz
TxTy
ψ x1
z3ϕ
x1y1z0
Rotation autour de z3 : angle de rotation propre
x1y2z3
x1y2z3
x3y3z3
θ
ϕ
Modélisation des liaisons• 2B Degré de liaison – Degré de liberté
Degré de liberté
On appelle degrés de liberté tous les mouvements que peut réaliser un solide relativement à un repère fixé et donc par rapport à un autre solide fixe. On les relativement à un repère fixé et donc par rapport à un autre solide fixe. On les notera nc pour cinématique.
Pour un solide libre de tout mouvement, on aura alors 6 inconnues de liberté.
Un tiroir ne possède qu’une liberté par rapport au meuble qui est la translation. On aura donc :
Statique Thierry Boulay 20
translation. On aura donc :
nc = 1
Degré de liaison
On appelle degrés de liaison tous les efforts que peut transmettre un solide relativement à un repère fixé et donc à un autre solide fixe. On les notera ns
• 2B Degré de liaison – Degré de liberté
Modélisation des liaisons
relativement à un repère fixé et donc à un autre solide fixe. On les notera nspour statique.
Pour un solide complètement bloqué, on aura alors 6 inconnues de liaison.
ne transmettent un effort que dans une
du marteau sur le clou
L’impact du club sur la balle
ou
Statique Thierry Boulay 21
ns = 1
ne transmettent un effort que dans une direction (perpendiculaire au plan de
contact). On aura donc :
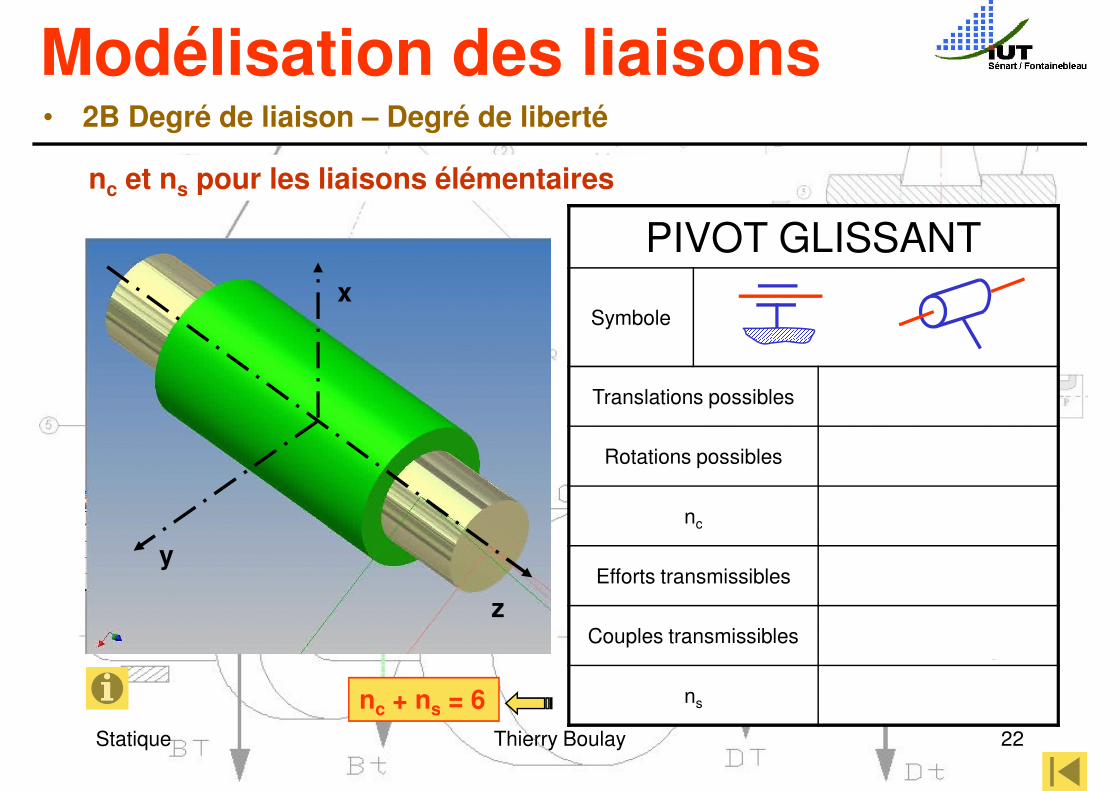
nc et ns pour les liaisons élémentaires
• 2B Degré de liaison – Degré de liberté
Modélisation des liaisons
PIVOT GLISSANT
Symbole
Translations possibles TzRotations possibles Rz
nc 2
x
Statique Thierry Boulay 22
nc 2Efforts transmissibles Fx ; Fy
Couples transmissibles Mx ; Myns 4
y
z
nc + ns = 6
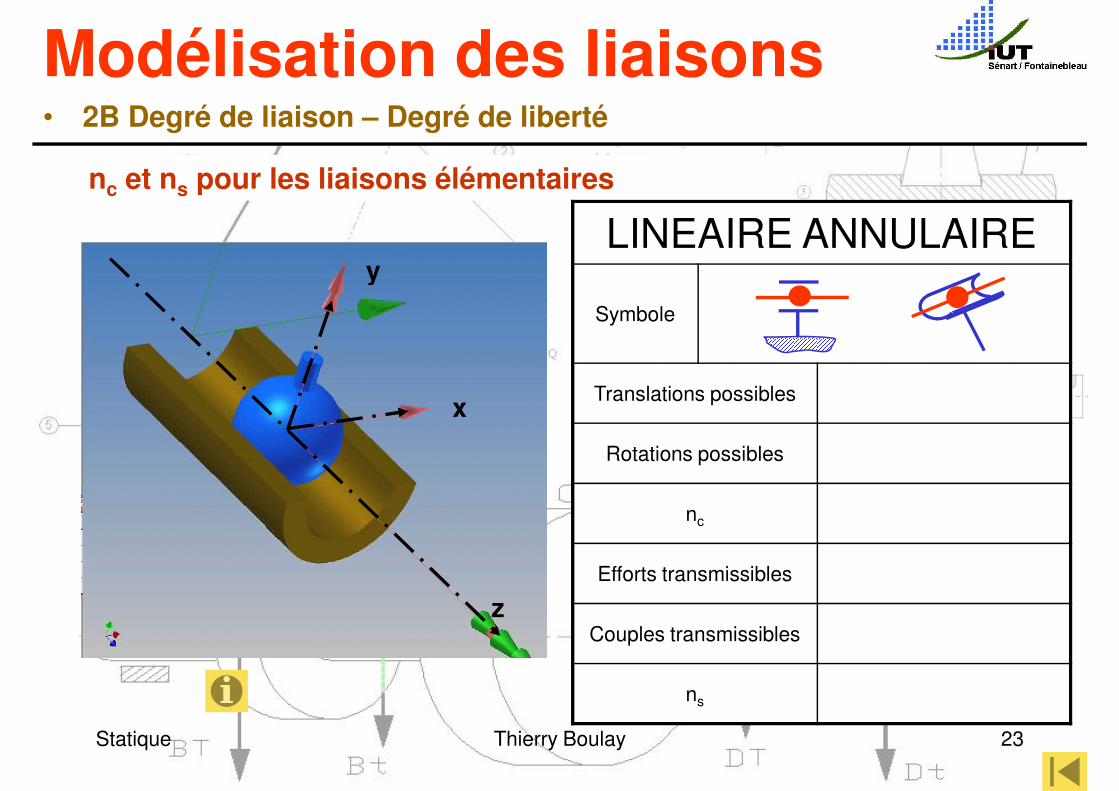
nc et ns pour les liaisons élémentaires
• 2B Degré de liaison – Degré de liberté
Modélisation des liaisons
LINEAIRE ANNULAIREy
Symbole
Translations possibles TzRotations possibles Rx ; Ry ; Rz
nc 4
y
x
Statique Thierry Boulay 23
4Efforts transmissibles Fx ; Fy
Couples transmissibles -----ns 2
z

nc et ns pour les liaisons élémentaires
• 2B Degré de liaison – Degré de liberté
Modélisation des liaisons
LINEAIRE RECTILIGNE
Symbole
Translations possibles Tx ; TzRotations possibles Ry ; Rz
nc 4
y
z
Statique Thierry Boulay 24
4Efforts transmissibles Fy
Couples transmissibles Mxns 2
z
x
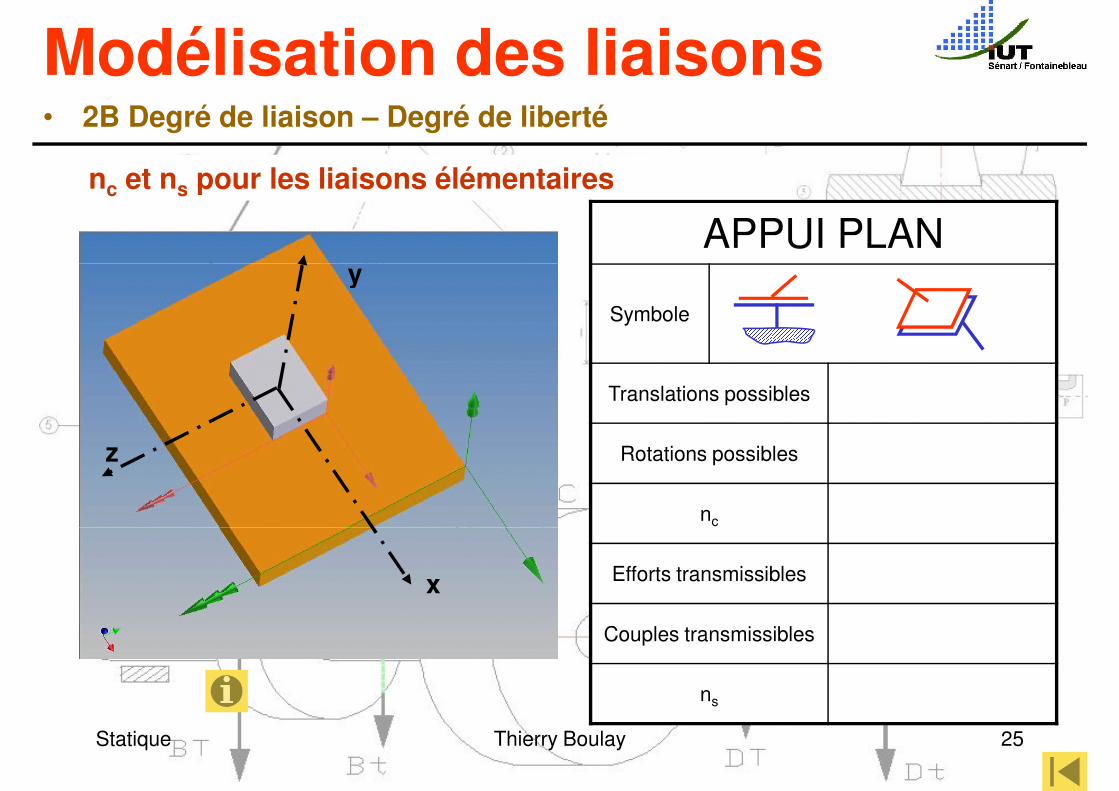
nc et ns pour les liaisons élémentaires
• 2B Degré de liaison – Degré de liberté
Modélisation des liaisons
APPUI PLANy
Symbole
Translations possibles Tx ; TzRotations possibles Ry
nc 3
y
z
Statique Thierry Boulay 25
3Efforts transmissibles Fy
Couples transmissibles Mx ; Mzns 3
x
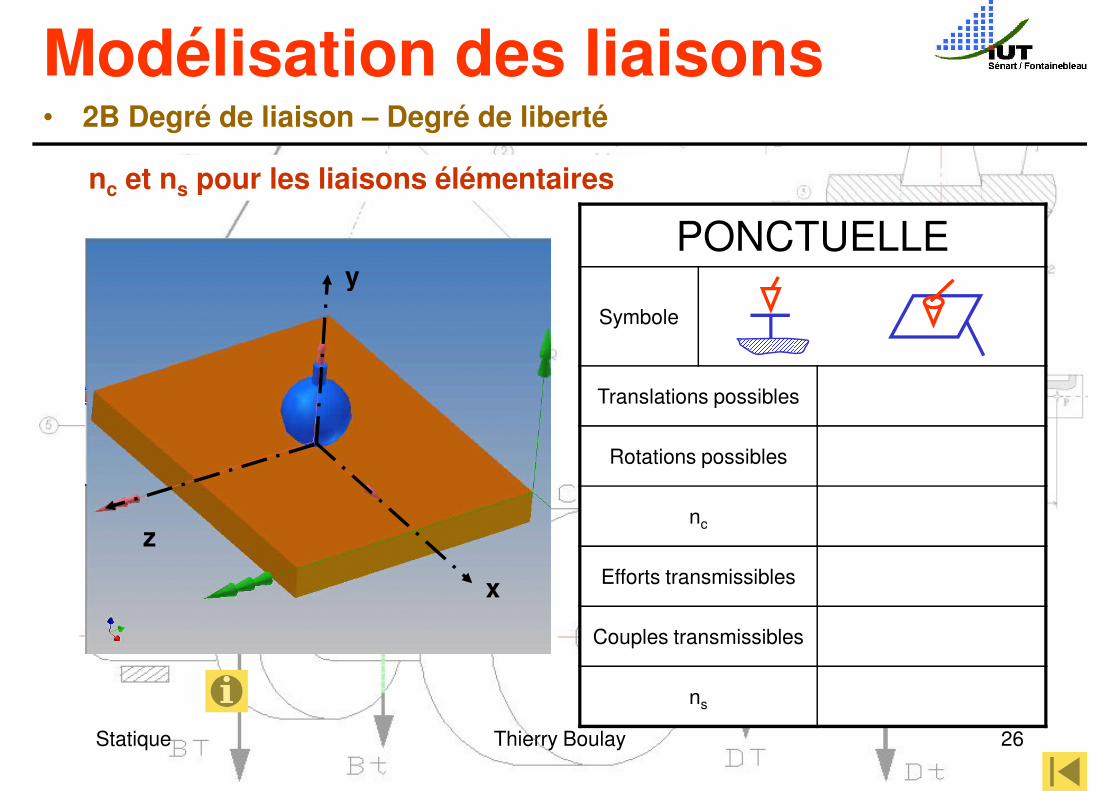
nc et ns pour les liaisons élémentaires
• 2B Degré de liaison – Degré de liberté
Modélisation des liaisons
PONCTUELLEy
Symbole
Translations possibles Tx ; TzRotations possibles Rx ;Ry ; Rz
nc 5
y
z
Statique Thierry Boulay 26
nc 5Efforts transmissibles Fy
Couples transmissibles -----ns 1
z
x

nc et ns pour les liaisons élémentaires
• 2B Degré de liaison – Degré de liberté
Modélisation des liaisons
ROTULEz
Symbole
Translations possibles -----Rotations possibles Rx ; Ry ; Rz
nc 3
yz
Statique Thierry Boulay 27
3Efforts transmissibles Fx ; Fy ; Fz
Couples transmissibles -----ns 3
x
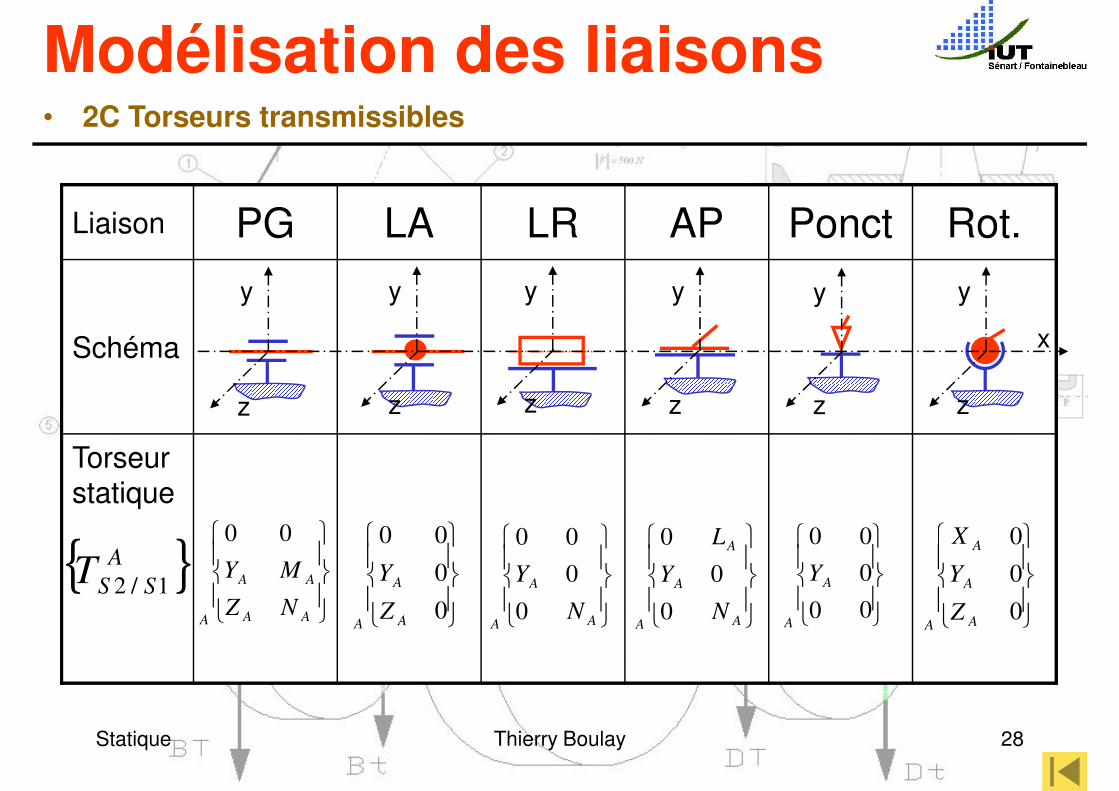
• 2C Torseurs transmissibles
Modélisation des liaisons
Liaison PG LA LR AP Ponct Rot.
Schéma
Torseur statique
y yyyyy
z zzzz z
x
00 00 00 L0 00 0X
Statique Thierry Boulay 28
{ }A
SST 1/2
A
A
A
A
AN
M
Z
Y
00
0
0
00
A
A
AZ
Y
A
A
AN
Y 0
0
0
0
A
A
A
AN
L
Y 0
0
0
0
0
0
0
0
A
A
Y
0
0
0
A
A
A
AZ
Y
X
Modélisation des liaisons• 2D Les liaisons composées
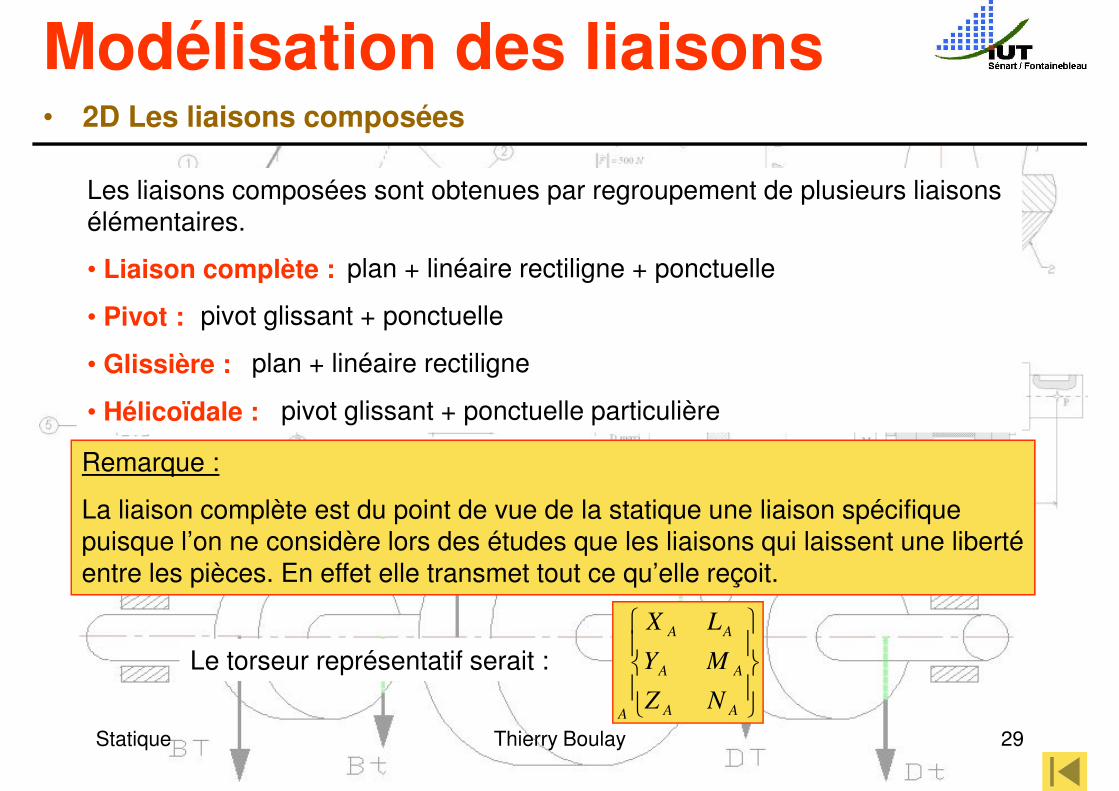
Les liaisons composées sont obtenues par regroupement de plusieurs liaisons élémentaires.
• Liaison complète : plan + linéaire rectiligne + ponctuelle• Liaison complète :
• Pivot :
• Glissière :
• Hélicoïdale :
Remarque :
La liaison complète est du point de vue de la statique une liaison spécifique puisque l’on ne considère lors des études que les liaisons qui laissent une liberté
plan + linéaire rectiligne + ponctuelle
pivot glissant + ponctuelle
plan + linéaire rectiligne
pivot glissant + ponctuelle particulière
Statique Thierry Boulay 29
puisque l’on ne considère lors des études que les liaisons qui laissent une liberté entre les pièces. En effet elle transmet tout ce qu’elle reçoit.
A
A
A
A
A
A
AN
M
L
Z
Y
X
Le torseur représentatif serait :

nc et ns pour les liaisons composées
Modélisation des liaisons
PIVOTy
z
• 2D Les liaisons composées
Symbole
Translations possibles -----Rotations possibles Rx
nc 1
y
Statique Thierry Boulay 30
1Efforts transmissibles Fx ; Fy ; Fz
Couples transmissibles My ; Mzns 5
x
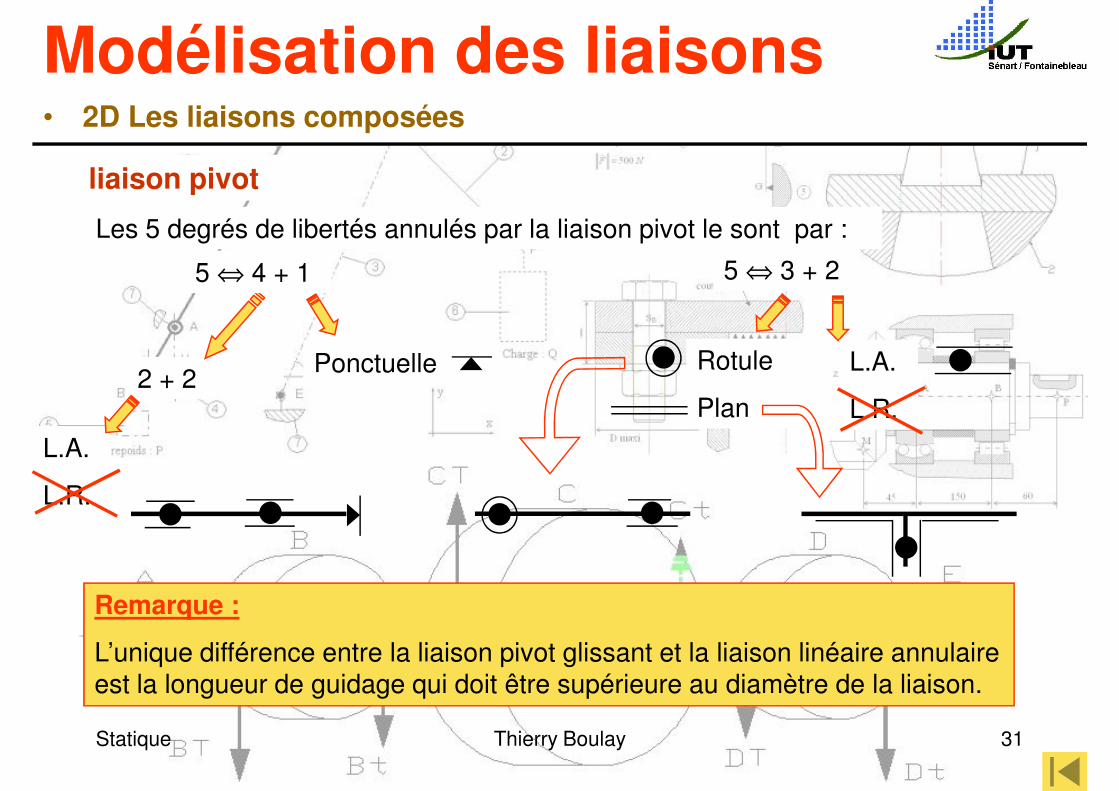
Les 5 degrés de libertés annulés par la liaison pivot le sont par :
Modélisation des liaisons• 2D Les liaisons composées
liaison pivot
5 ⇔ 4 + 1 5 ⇔ 3 + 2
2 + 2
L.A.
L.R.
Rotule
Plan
L.A.
L.R.
Ponctuelle
5 ⇔ 4 + 1 5 ⇔ 3 + 2
Statique Thierry Boulay 31
Remarque :
L’unique différence entre la liaison pivot glissant et la liaison linéaire annulaire est la longueur de guidage qui doit être supérieure au diamètre de la liaison.
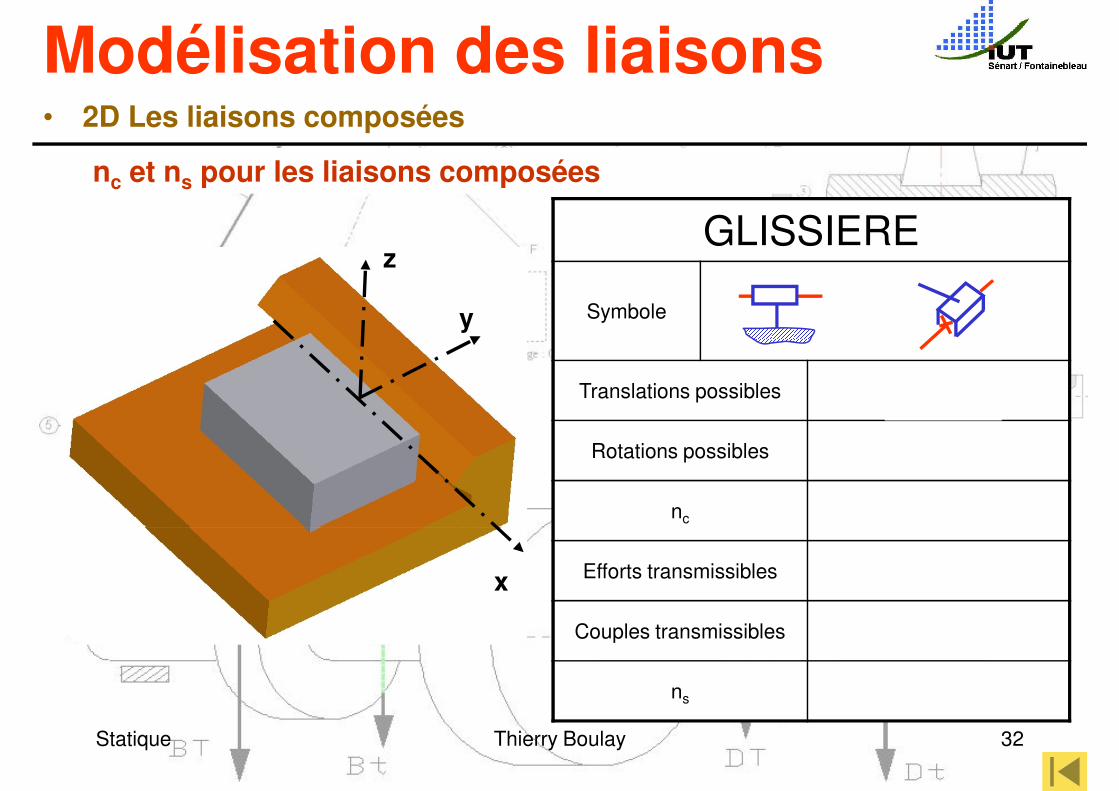
nc et ns pour les liaisons composées
Modélisation des liaisons
GLISSIEREz
• 2D Les liaisons composées
Symbole
Translations possibles TxRotations possibles -----
nc 1
y
z
Statique Thierry Boulay 32
1Efforts transmissibles Fy ; Fz
Couples transmissibles Mx ; My ; Mzns 5
x
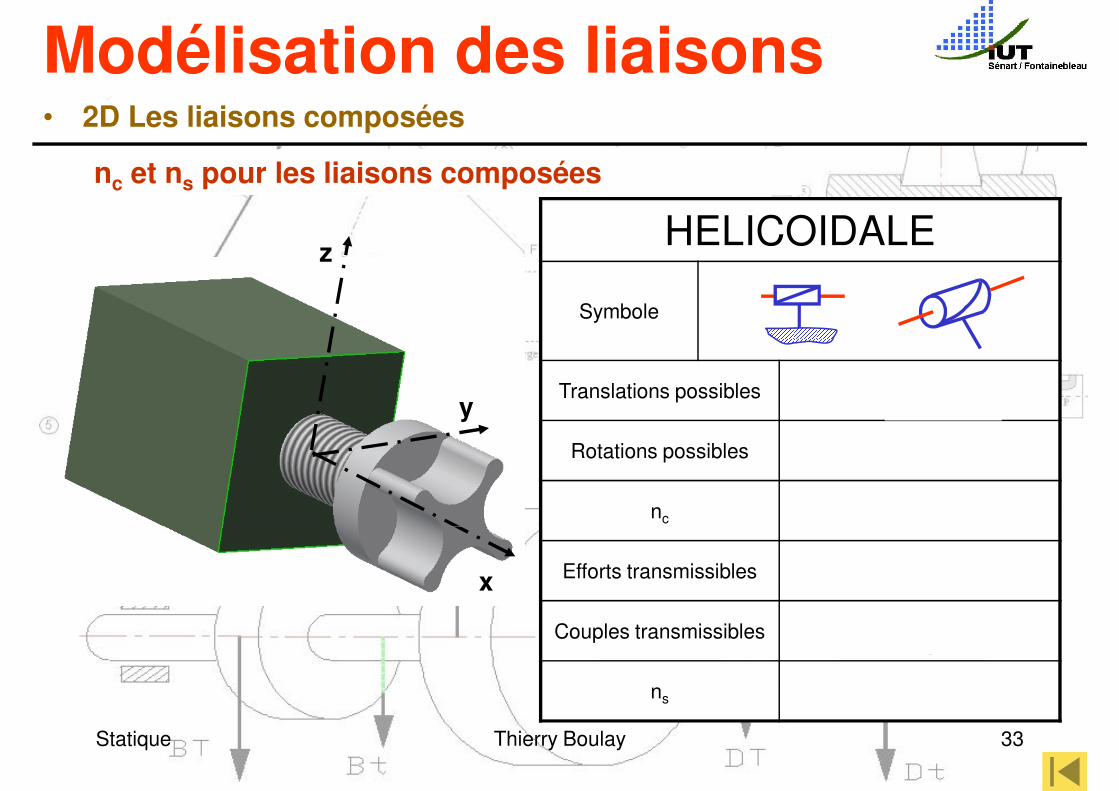
nc et ns pour les liaisons composées
Modélisation des liaisons
HELICOIDALEz
• 2D Les liaisons composées
Symbole
Translations possibles TxRotations possibles F(Tx)
nc 1
y
z
Statique Thierry Boulay 33
1Efforts transmissibles k.Mx ; Fy ; Fz
Couples transmissibles Mx ; My ; Mzns 5
x

• 2E Torseurs transmissibles des liaisons composées
Modélisation des liaisons
Liaison Pivot Glissière Hélicoïdale
Schéma
Torseur statique
y yy
z zzx
AX 0 AL0 ⋅ AA LLk
Statique Thierry Boulay 34
{ }A
SST 1/2
A
A
A
A
A
AN
M
Z
Y
X 0
A
A
A
A
A
AN
M
L
Z
Y
0
⋅
A
A
A
A
A
A
AN
M
L
Z
Y
Lk

Étude de l’équilibre• 3A Principe général
Théorème de la statiqueLe principe fondamental de la dynamique (PFD), énoncé par Newton, appliqué à un système matériel fixe, relativement à un repère Galiléen,
Galilée (Galiléo GALILEI) : italien [1564-1642] ; découverte des lois des
appliqué à un système matériel fixe, relativement à un repère Galiléen, traduit l’équilibre du système par les deux équations vectorielles suivantes :
0/
=⋅=∑ amextFSS
0'
/=⋅=∑ ωJextFM
SSA
Statique Thierry Boulay 35
Galilée (Galiléo GALILEI) : italien [1564-1642] ; découverte des lois des chutes des corps (1602) ; compositions des vitesses ; ralliement aux visions de Copernic ; publication des exactitudes du système du monde (1632)
Nicolas Copernic : polonais [1473-1543] ; hypothèse sur le double mouvement des planètes sur elles mêmes et autour du soleil
Étude de l’équilibre• 3A Principe général
Les deux équations précédentes peuvent se résumer sous la formule :
{ } { }0∑ =T{ } { }0/∑ =
SST
Remarques :
Pour la plupart des systèmes étudiés, un repère lié à la terre constitue une approximation très suffisante ;
Le point d’application n’apparaît pas dans cette équation car il ne s’agit que d’un outil de représentation mathématique :
Statique Thierry Boulay 36
d’un outil de représentation mathématique :
{ } { }0/∑ =
ASST
Étude de l’équilibre• 3B Notion d’hyperstaticité d’un système
DéfinitionsUn système est isostatique si en enlevant un degré de liaison, cela entraîne la rupture de l’équilibre statique.
Un système est hyperstatique si en enlevant un degré de liaison cela n’entraîne pas la rupture de l’équilibre statique.
Un système est hypostatique s’il manque au moins un degré de liaison pour être en équilibre statique.
Détermination de l’état d’un système
a. Isoler le système à étudier n : nombre de solides constituant le système
Statique Thierry Boulay 37
a. Isoler le système à étudier
b. Recenser le nombre d’inconnues statiques Is
c. Recenser le nombre d’équations indépendantes R ≤ n . E
d. Comparer Is avec R
constituant le système
E : nombre d’équations
3 si pb plan,
6 si pb spatial
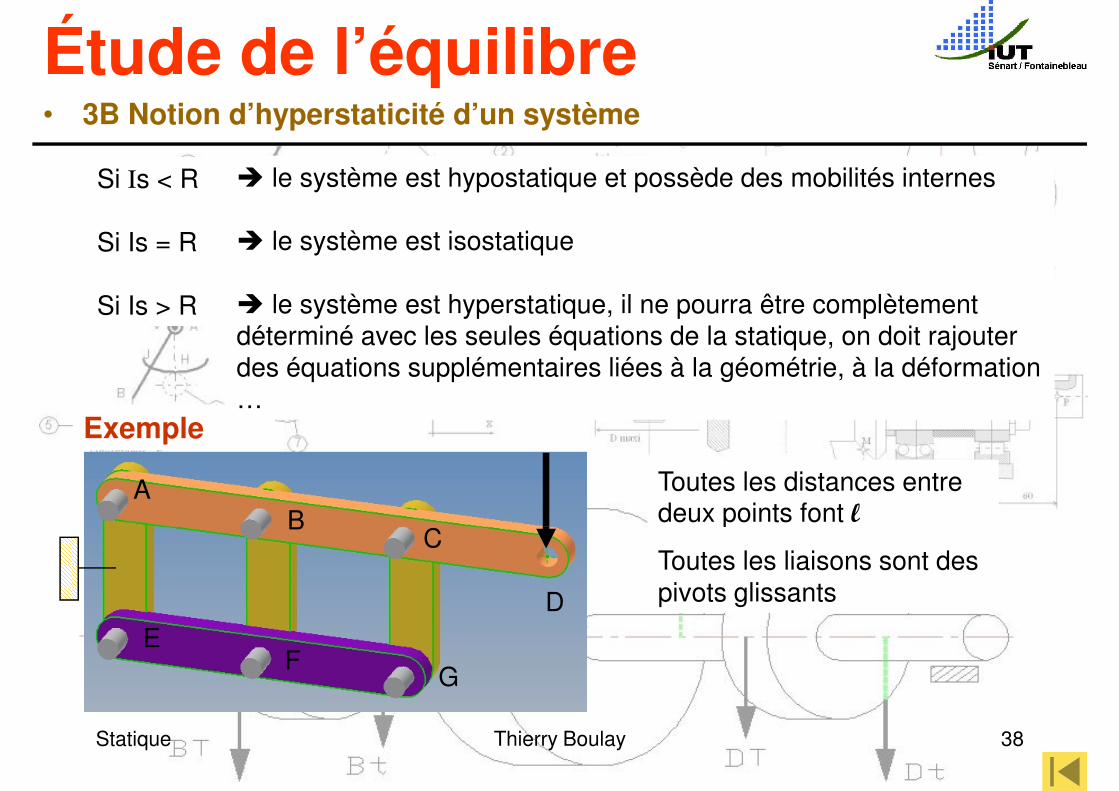
Étude de l’équilibre
Si Is < R
Si Is = R
• 3B Notion d’hyperstaticité d’un système
� le système est hypostatique et possède des mobilités internes
� le système est isostatique
Si Is > R
Exemple
AB
C
Toutes les distances entre deux points font l
� le système est hyperstatique, il ne pourra être complètement déterminé avec les seules équations de la statique, on doit rajouter des équations supplémentaires liées à la géométrie, à la déformation …
Statique Thierry Boulay 38
BC
DE
FG
deux points font l
Toutes les liaisons sont des pivots glissants
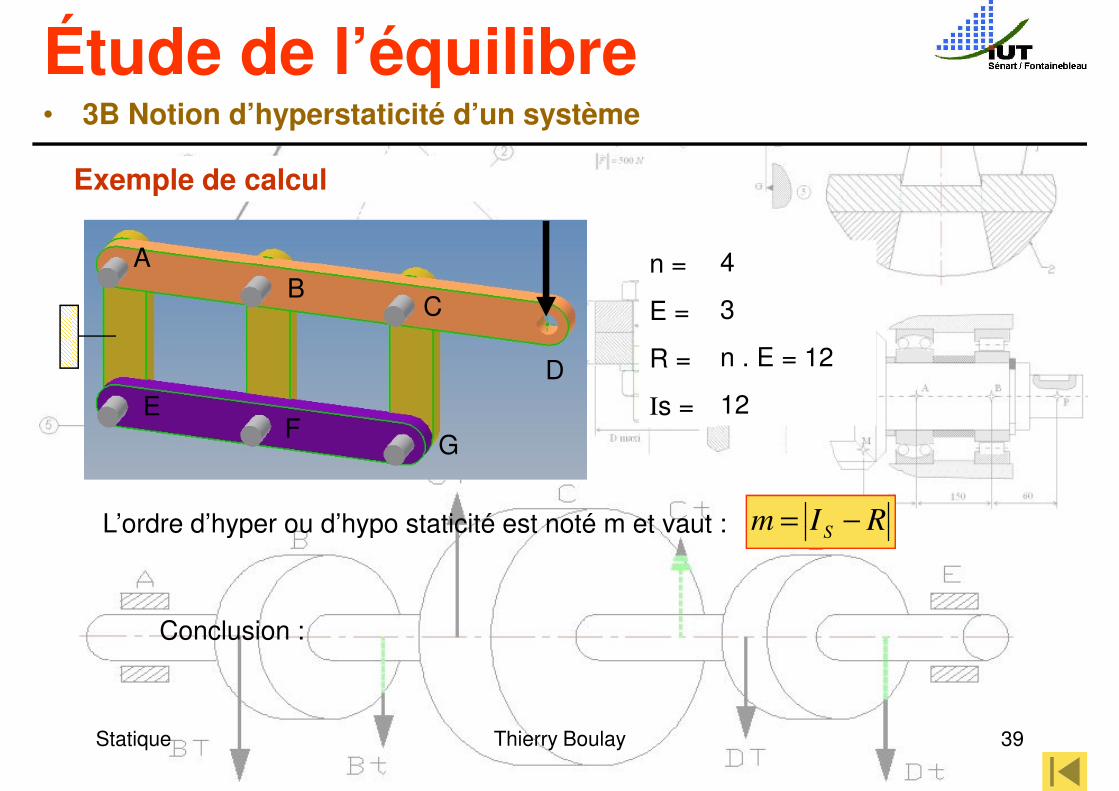
Étude de l’équilibre
Exemple de calcul
• 3B Notion d’hyperstaticité d’un système
A n = 4AB
C
DE
FG
n =
E =
R =
Is =
L’ordre d’hyper ou d’hypo staticité est noté m et vaut : RIm S −=
4
3
n . E = 12
12
Statique Thierry Boulay 39
Conclusion :
L’ordre d’hyper ou d’hypo staticité est noté m et vaut : RIm S −=
Étude de l’équilibre
Exemple suite et fin ….
• 3B Notion d’hyperstaticité d’un système
Au repos le
ATTENTION donc
Au repos le système n’est
pas à l’équilibre statique du fait
de sa géométrie particulière…il
est donc mobile
Statique Thierry Boulay 40
ATTENTION donc à la notion d’équilibre

Étude de l’équilibre• 3C Méthodologie
a. Déterminer les frontières du système à étudier
b. Déterminer un repère général flottant pour toute l’étude
c. Inventorier les liaisons
d. Vérifier la résolvabilité globale du système
e. Réaliser un graphe de liaisons
f. Lister les études possibles
g. Analyser les redondances
h. Établir un tableau d’analyse
Statique Thierry Boulay 41
h. Établir un tableau d’analyse
i. Déterminer un ordre d’études qui permette de trouver le plus rapidement possible des résultats numériques
j. Résoudre suivant l’ordre prévu
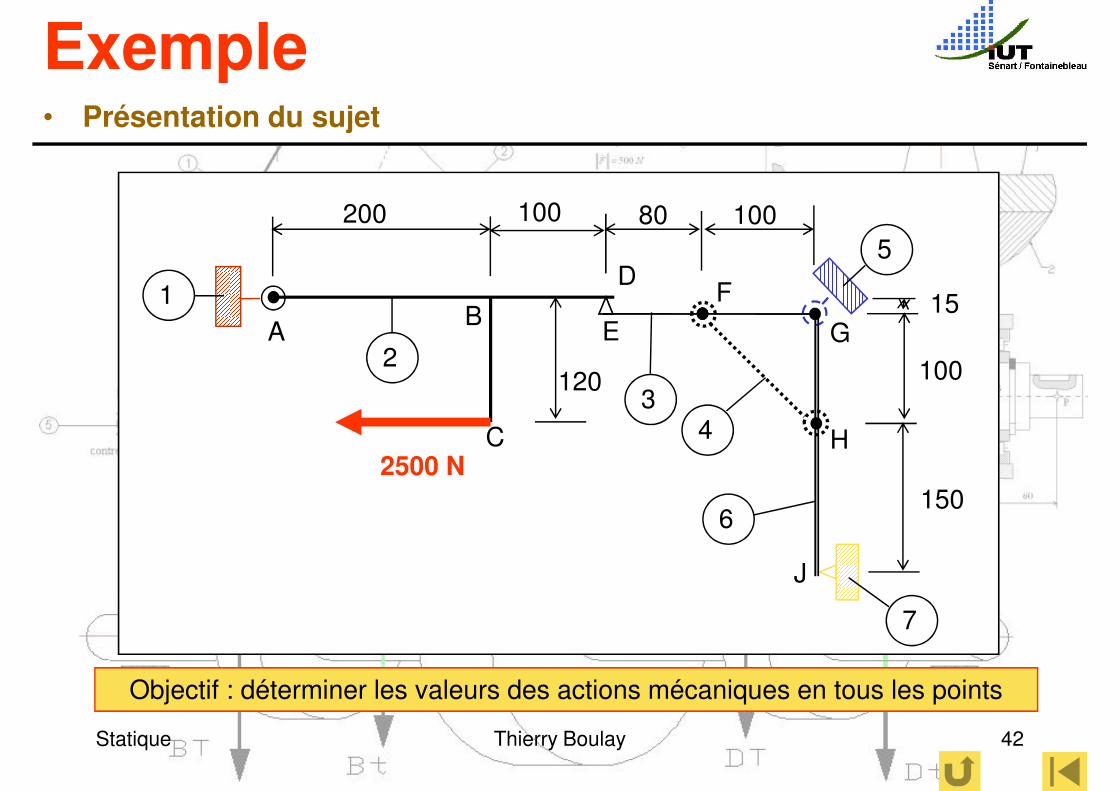
Exemple• Présentation du sujet
200 100 80 1005
D15
100
150
120
2500 N
6
5
43
2
1A
B
C
D
E
F
G
H
Statique Thierry Boulay 42
7
6
J
Objectif : déterminer les valeurs des actions mécaniques en tous les points
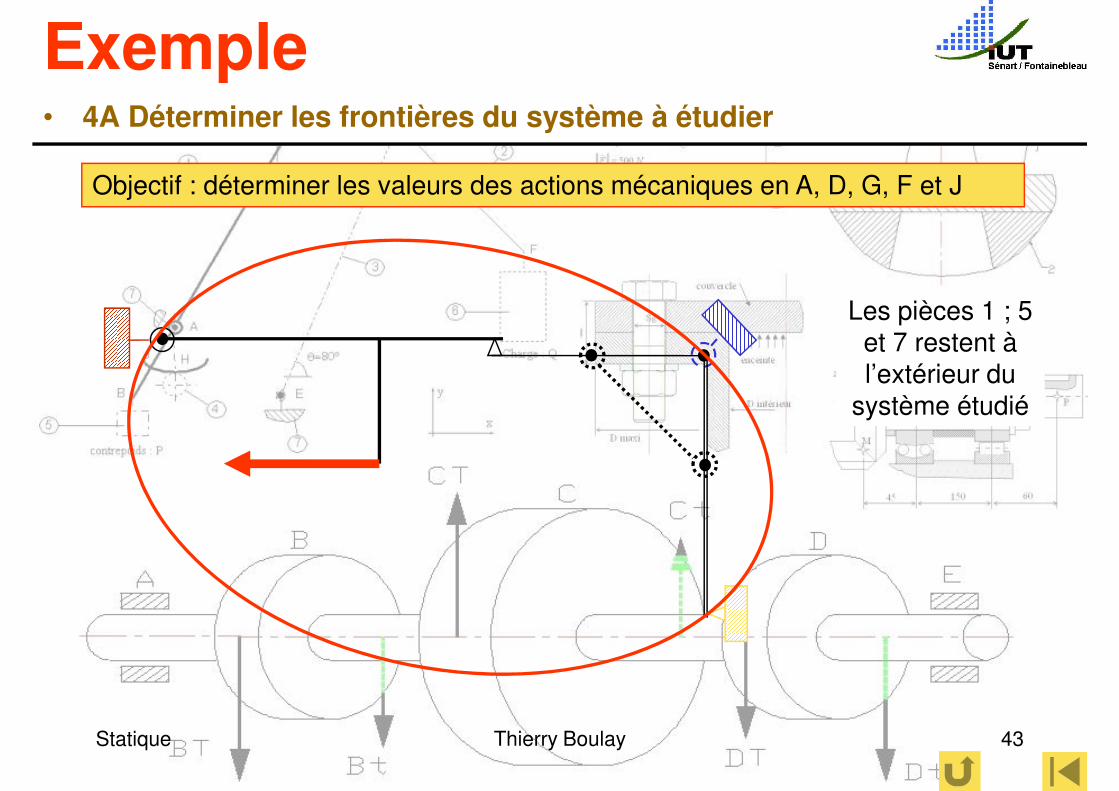
Exemple• 4A Déterminer les frontières du système à étudier
Objectif : déterminer les valeurs des actions mécaniques en A, D, G, F et J
Les pièces 1 ; 5 et 7 restent à l’extérieur du
système étudié
Statique Thierry Boulay 43
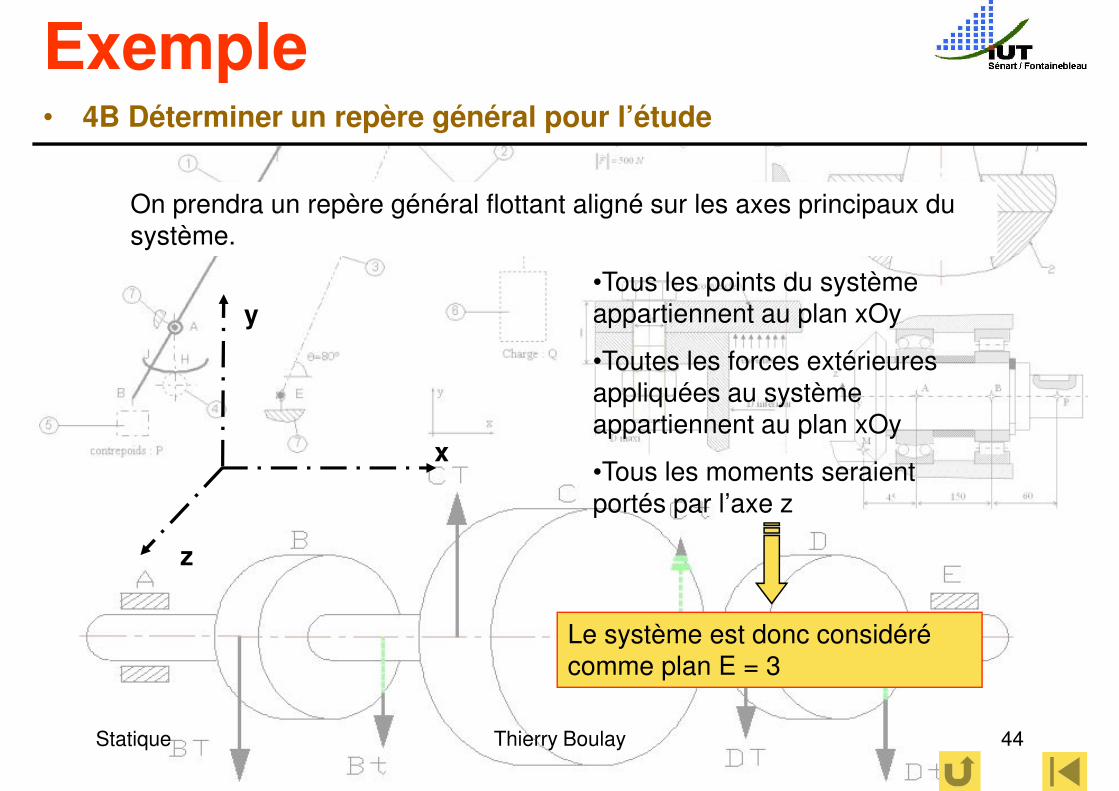
Exemple• 4B Déterminer un repère général pour l’étude
On prendra un repère général flottant aligné sur les axes principaux du système.
x
y•Tous les points du système appartiennent au plan xOy
•Toutes les forces extérieures appliquées au système appartiennent au plan xOy
•Tous les moments seraient portés par l’axe z
Statique Thierry Boulay 44
z
Le système est donc considéré comme plan E = 3
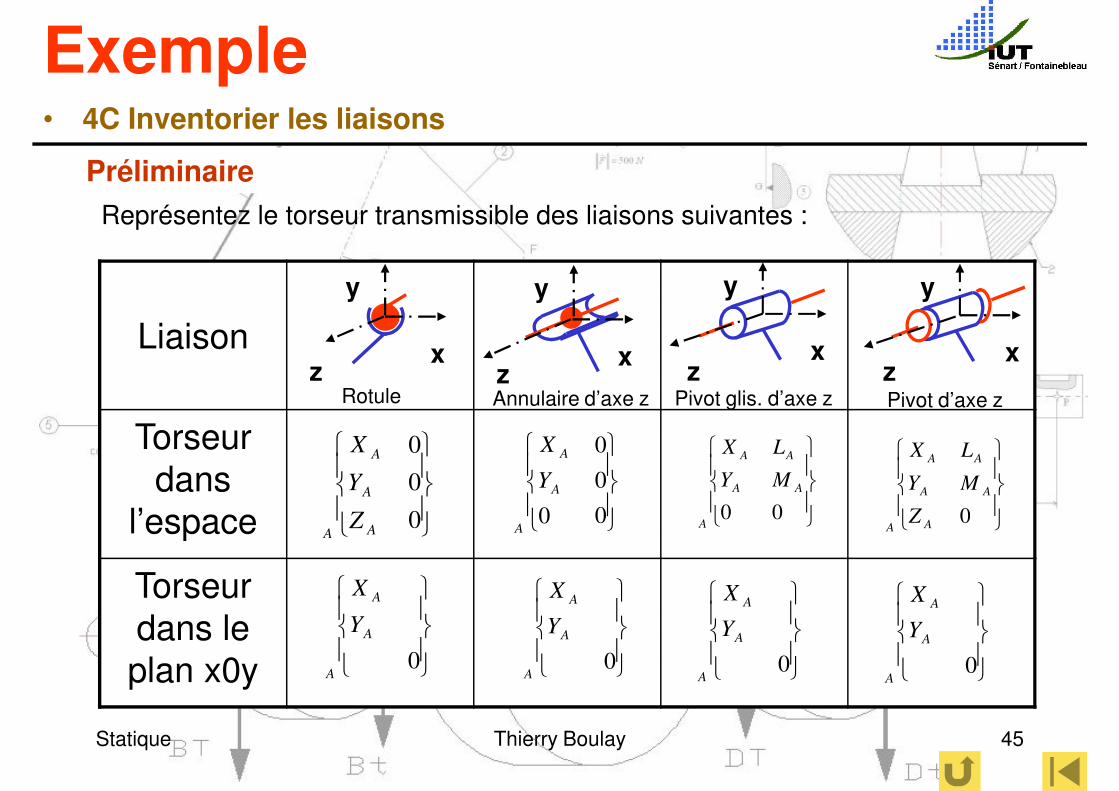
Exemple• 4C Inventorier les liaisons
Préliminaire
Représentez le torseur transmissible des liaisons suivantes :
Liaison
Torseur dans
l’espace
x
y
zRotule
x
y
zPivot d’axe z
x
y
zPivot glis. d’axe z
x
y
zAnnulaire d’axe z
0
0
0
A
A
A
AZ
Y
X
0
0
0
0
A
A
A
Y
X
0
A
A
A
A
A
A
M
L
Z
Y
X
00
A
A
A
A
A
M
L
Y
X
Statique Thierry Boulay 45
l’espace
Torseur dans le plan x0y
0AA
Z
0
A
A
A
Y
X
0
A
A
A
Y
X
0
A
A
A
Y
X
0
A
A
A
Y
X
00A 0AA
ZA

Exemple• 4C Inventorier les liaisons
• En A, F, G3, G6 et H :
0
A
A
Y
X
Rotule
• En D :
• En J :
0
A
ponctuelle de normale y
ponctuelle de normale x
0
0
D
D
Y
0
JX
Statique Thierry Boulay 46
• En C : AME (Action Mécanique Extérieure)
0
J
−
0
0
2500
C

Exemple• 4D Vérifier la résolvabilité globale du système
n =
E =
4 solides
3 équations indépendantes par solideE =
E x n =
Is =
Is = n x E ⇒
3 équations indépendantes par solide
12
2 x 5 rotules + 1 x 1ponct/y + 1 x 1ponct/x = 12
système résolvable et isostatique
Statique Thierry Boulay 47
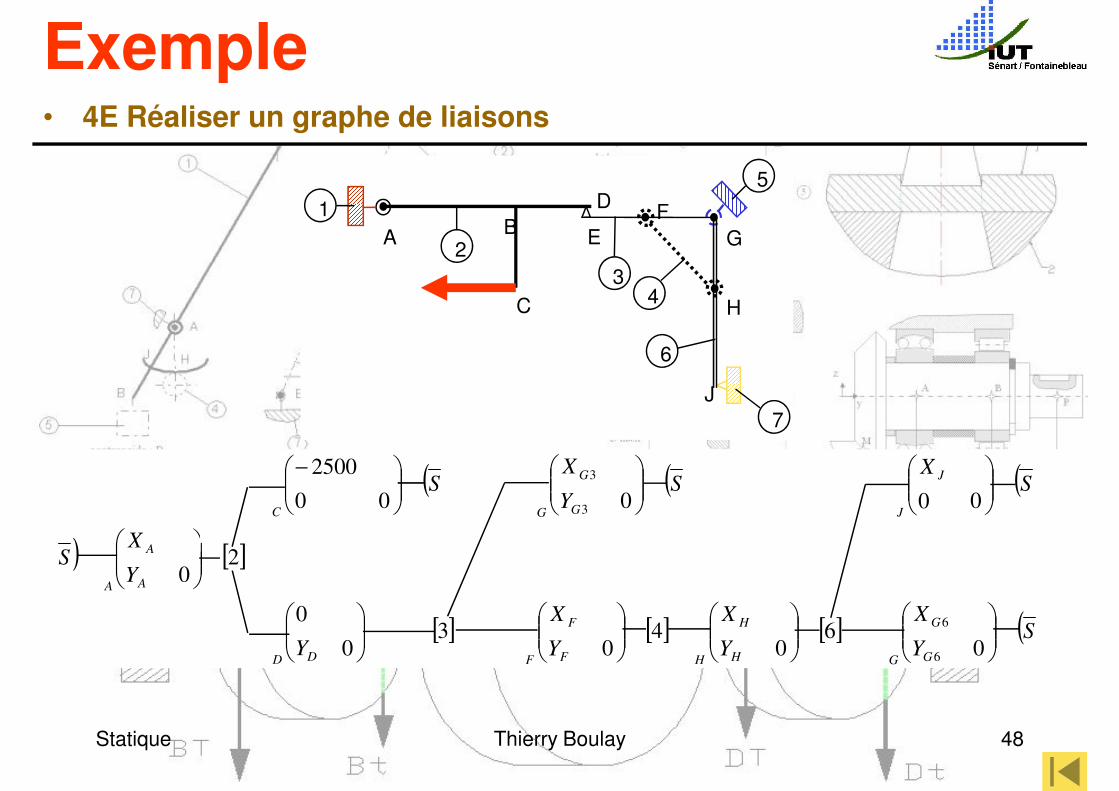
Exemple• 4E Réaliser un graphe de liaisons
A BD
EF
G
5
2
1
C H
J7
6
43
( ( (
)
SX
SY
XS
J
JG
G
GC
−
00000
2500
3
3
Statique Thierry Boulay 48
) [ ]
[ ] [ ] [ ] (SY
X
Y
X
Y
X
Y
Y
XS
G
G
GH
H
HF
F
FDD
A
A
A
06
04
03
0
0
20
6
6
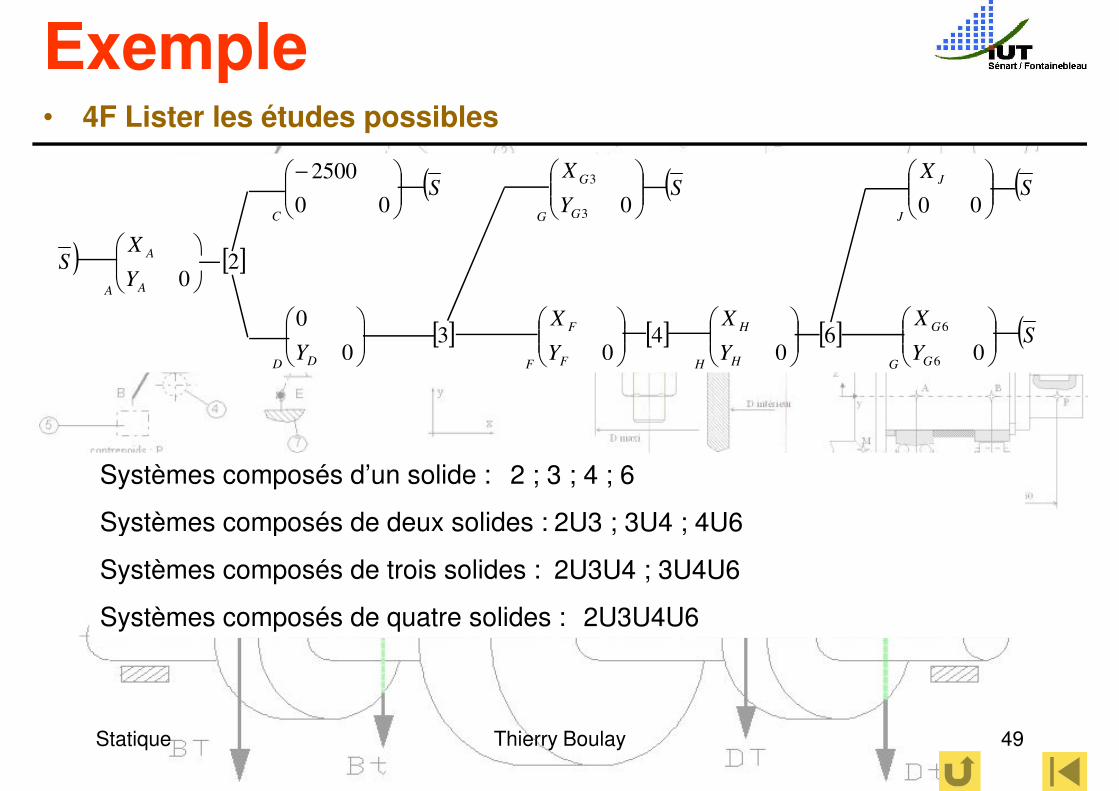
Exemple• 4F Lister les études possibles
( ( (
) [ ]X
S
SX
SY
XS
A
J
JG
G
GC
−
2
00000
2500
3
3
Systèmes composés d’un solide :
Systèmes composés de deux solides :
2 ; 3 ; 4 ; 6
2U3 ; 3U4 ; 4U6
) [ ]
[ ] [ ] [ ] (SY
X
Y
X
Y
X
Y
YS
G
G
GH
H
HF
F
FDD
AA
06
04
03
0
0
20
6
6
Statique Thierry Boulay 49
Systèmes composés de deux solides :
Systèmes composés de trois solides :
Systèmes composés de quatre solides :
2U3 ; 3U4 ; 4U6
2U3U4 ; 3U4U6
2U3U4U6
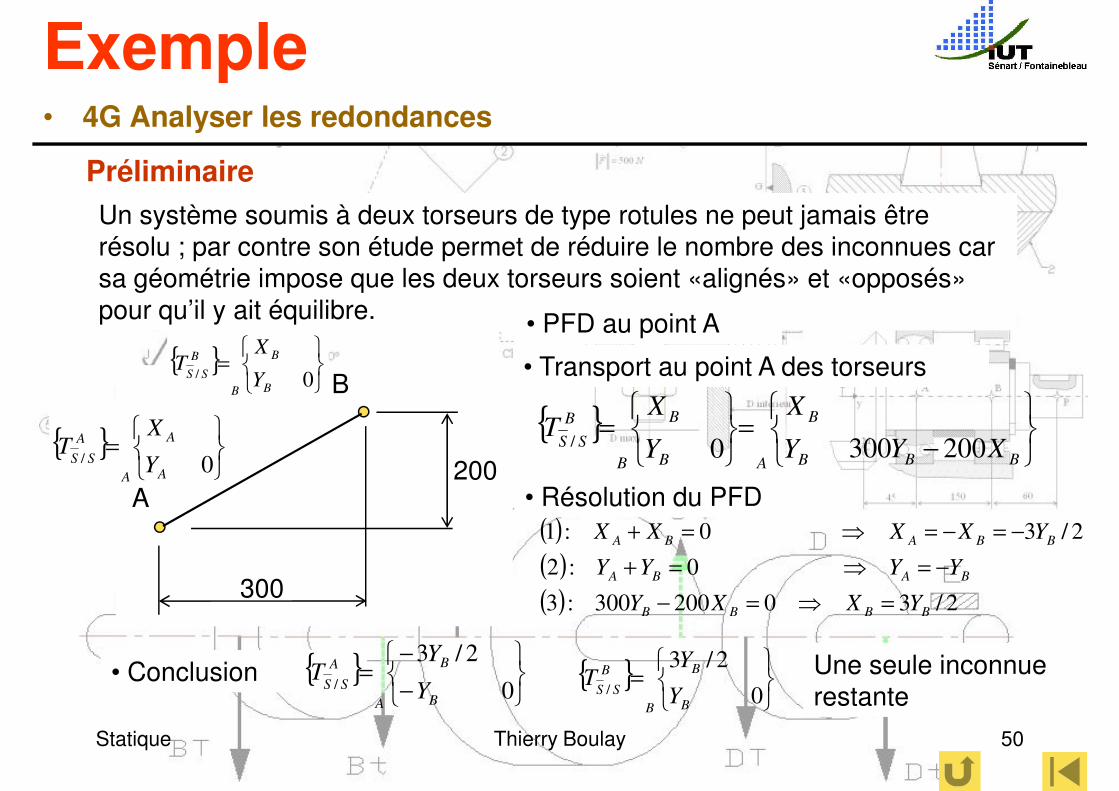
Exemple• 4G Analyser les redondances
Préliminaire
Un système soumis à deux torseurs de type rotules ne peut jamais être résolu ; par contre son étude permet de réduire le nombre des inconnues car sa géométrie impose que les deux torseurs soient «alignés» et «opposés» sa géométrie impose que les deux torseurs soient «alignés» et «opposés» pour qu’il y ait équilibre.
A
B
200{ }
=0/
A
A
A
A
SS Y
XT
{ }
=0/
B
B
B
B
SS Y
XT
• PFD au point A
• Résolution du PFD
• Transport au point A des torseurs
{ }
−
=
=BBB
B
AB
B
B
B
SS XYY
X
Y
XT
2003000/
( ) 2/30:1 YXXXX −=−=⇒=+
Statique Thierry Boulay 50
300
• Conclusion Une seule inconnue restante
( )( )( ) 2/30200300:3
0:2
2/30:1
BBBB
BABA
BBABA
YXXY
YYYY
YXXXX
=⇒=−
−=⇒=+
−=−=⇒=+
{ }
−
−=
0
2/3
/
B
B
A
A
SS Y
YT { }
=0
2/3
/
B
B
B
B
SS Y
YT
Exemple• 4G Analyser les redondances
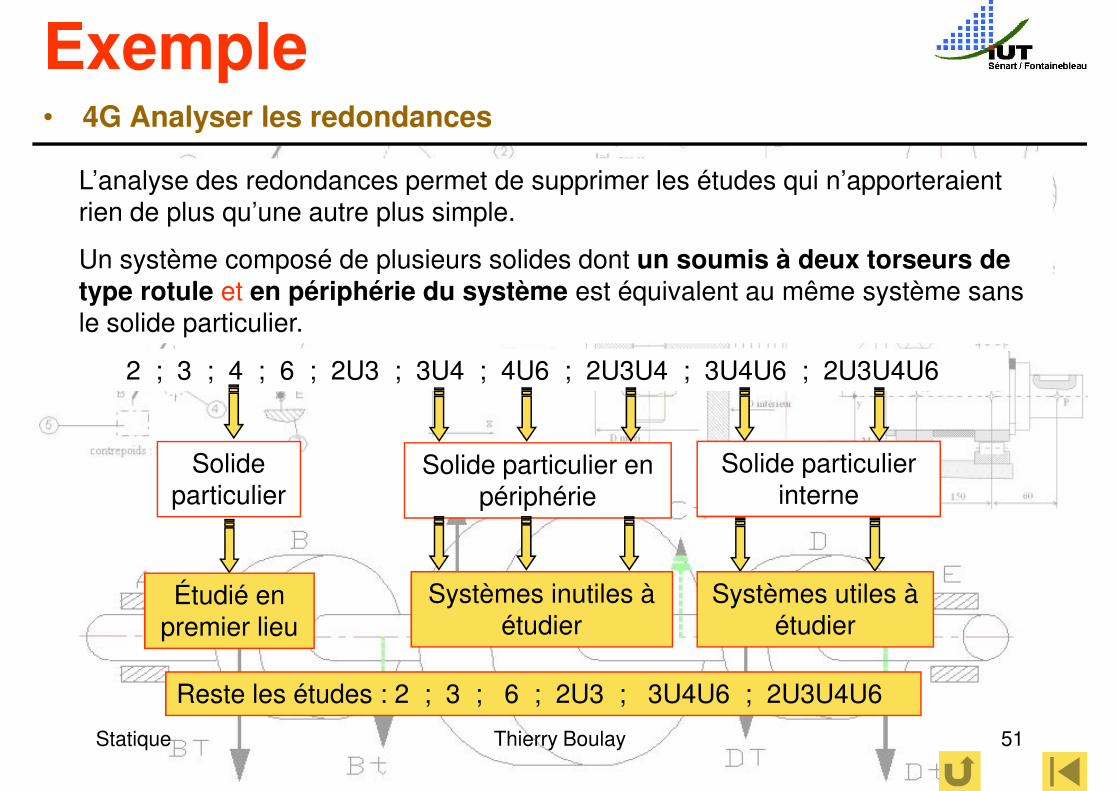
L’analyse des redondances permet de supprimer les études qui n’apporteraient rien de plus qu’une autre plus simple.
Un système composé de plusieurs solides dont un soumis à deux torseurs de Un système composé de plusieurs solides dont un soumis à deux torseurs de type rotule et en périphérie du système est équivalent au même système sans le solide particulier.
2 ; 3 ; 4 ; 6 ; 2U3 ; 3U4 ; 4U6 ; 2U3U4 ; 3U4U6 ; 2U3U4U6
Solide particulier
Solide particulier en périphérie
Solide particulier interne
Statique Thierry Boulay 51
Étudié en premier lieu
Systèmes inutiles à étudier
Systèmes utiles à étudier
Reste les études : 2 ; 3 ; 6 ; 2U3 ; 3U4U6 ; 2U3U4U6
( ( (
) [ ]X
S
SX
SY
XS
A
J
JG
G
GC
−
2
00000
2500
3
3
Exemple• 4H Établir un tableau d’analyse
) [ ]
[ ] [ ] [ ] (SY
X
Xh
Xg
Xf
X
Y
YS
G
G
GF
F
HF
F
FDD
A
A
A
06
0)(
)(4
0)(3
0
0
20
6
6
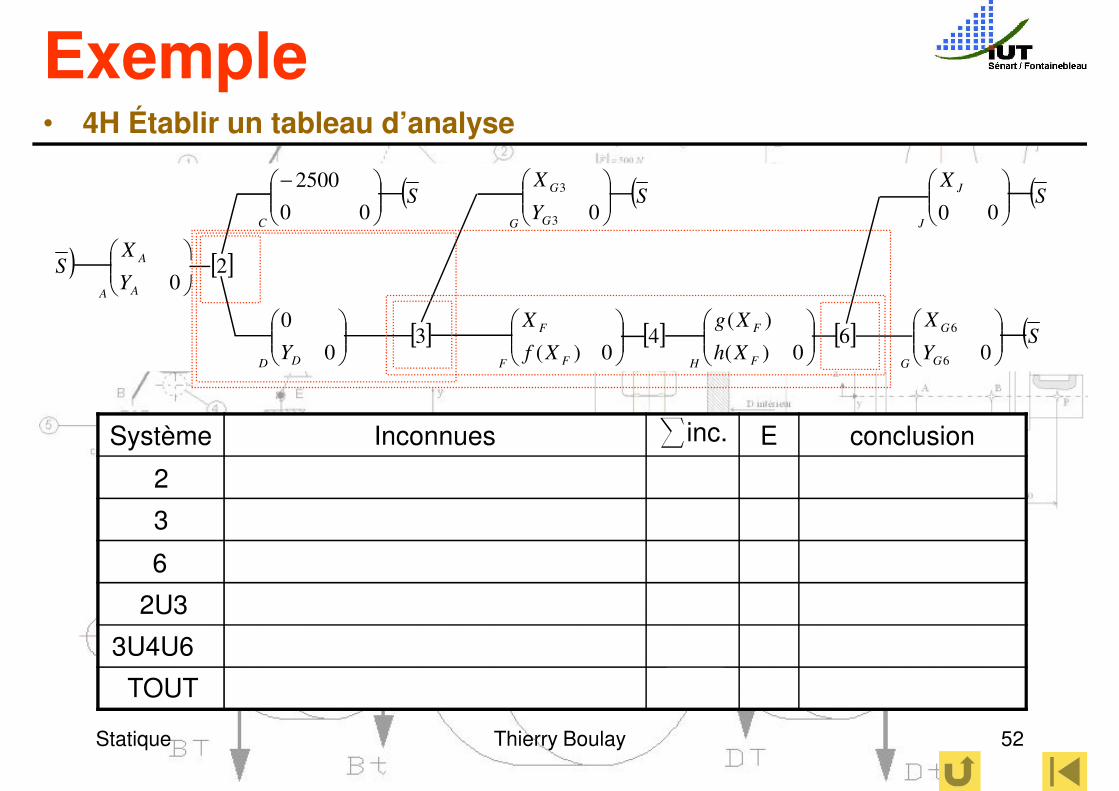
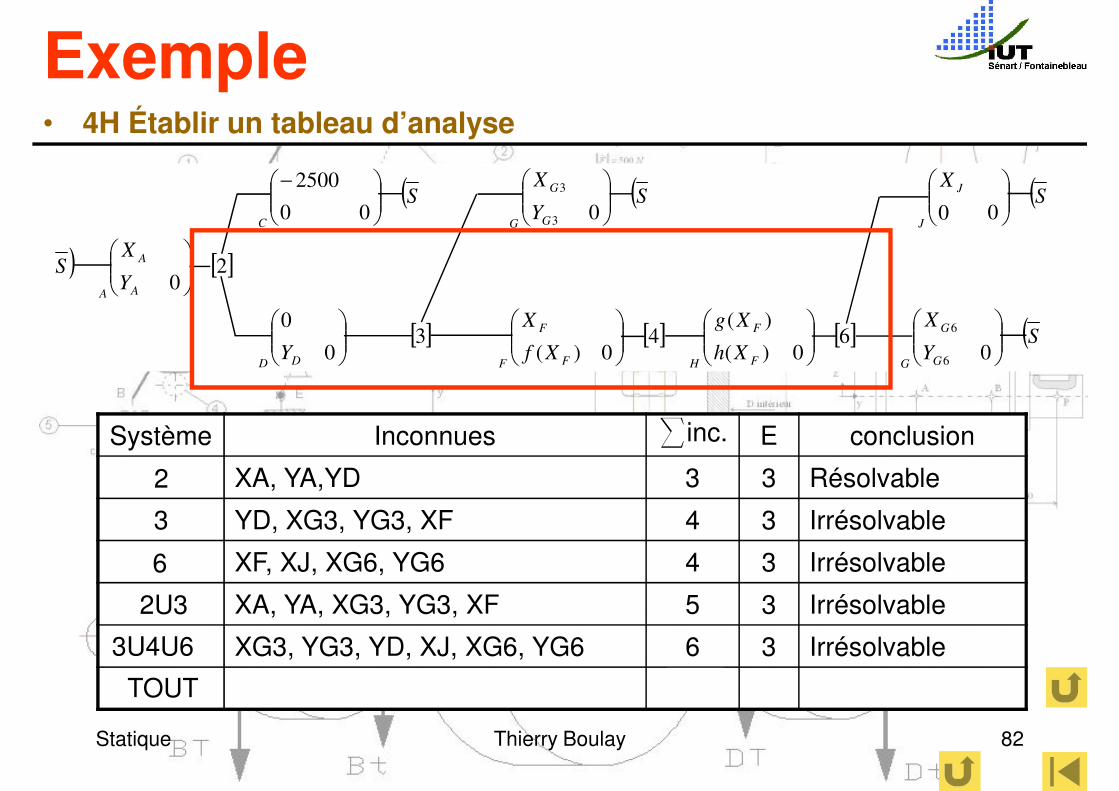
Système Inconnues ninc. E conclusion
XA, YA,YD 3 3 Résolvable
YD, XG3, YG3, XF 4 3 Irrésolvable
2
3
Statique Thierry Boulay 52
YD, XG3, YG3, XF 4 3 Irrésolvable
XF, XJ, XG6, YG6 4 3 Irrésolvable
XA, YA, XG3, YG3, XF 5 3 Irrésolvable
XG3, YG3, YD, XJ, XG6, YG6 6 3 Irrésolvable
XA, YA, XG3, YG3, XJ, XG6, YG6 7 3 Irrésolvable
3
6
2U3
3U4U6
TOUT
Exemple• 4I Déterminer un ordre d’études
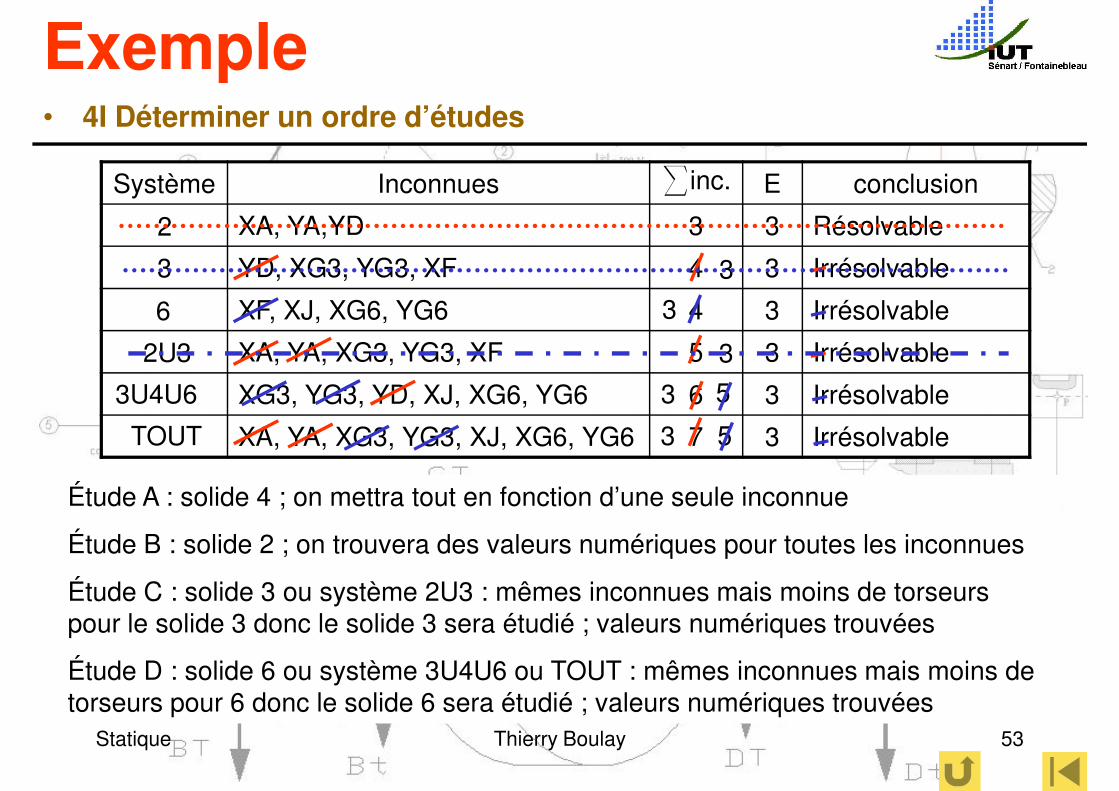
Système Inconnues ninc. E conclusion
XA, YA,YD 3 3 Résolvable
YD, XG3, YG3, XF 4 3 Irrésolvable
2
3 3YD, XG3, YG3, XF 4 3 Irrésolvable
XF, XJ, XG6, YG6 4 3 Irrésolvable
XA, YA, XG3, YG3, XF 5 3 Irrésolvable
XG3, YG3, YD, XJ, XG6, YG6 6 3 Irrésolvable
XA, YA, XG3, YG3, XJ, XG6, YG6 7 3 Irrésolvable
3
6
2U3
3U4U6
TOUT
Étude A : solide 4 ; on mettra tout en fonction d’une seule inconnue
3
5
5
3
3
3
3
Statique Thierry Boulay 53
Étude B : solide 2 ; on trouvera des valeurs numériques pour toutes les inconnues
Étude C : solide 3 ou système 2U3 : mêmes inconnues mais moins de torseurs pour le solide 3 donc le solide 3 sera étudié ; valeurs numériques trouvées
Étude D : solide 6 ou système 3U4U6 ou TOUT : mêmes inconnues mais moins de torseurs pour 6 donc le solide 6 sera étudié ; valeurs numériques trouvées

Exemple• 4J Résoudre suivant l’ordre prévu
Étude du solide 4• Inventaire des torseurs
{ }
=4/3
FFX
T { }
=0
4/6
HH
Y
XT
• Résolution du PFD
• Transport des torseurs au point :
• Choix d’un point d’application pour appliquer les PFD :
{ }
=
04/3
FFY
T { }
=
04/6
HHY
T
F
{ }
+
=
=HHH
H
FH
H
H
H
XYY
X
Y
XT
10010004/6
∧
−+⋅=∧+=
H
H
HHFY
XzFFHMM
100
1000
( ) HFHF XXXX −=⇒=+ 0:1
F
Statique Thierry Boulay 54
• Conclusion
( )( )( ) HHHH
HHFHF
HFHF
XYXY
XYYYY
XXXX
−=⇒=+
=−=⇒=+
−=⇒=+
0100100:3
0:2
0:1
{ }
−
=0
4/3
H
H
F
F
X
XT { }
−=
04/6
H
H
H
H
X
XT
Exemple• 4J Résoudre suivant l’ordre prévu
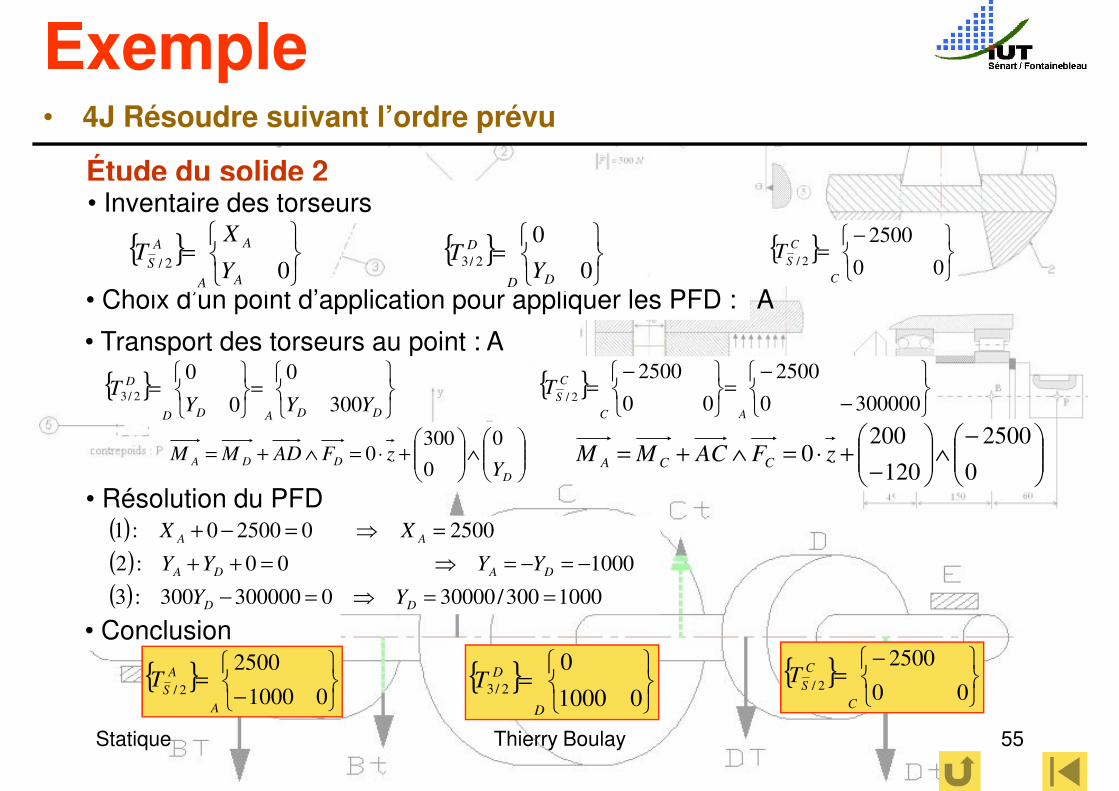
Étude du solide 2• Inventaire des torseurs
{ }
=0
2/
AA
S Y
XT { }
=0
02/3
D
YT { }
−
=00
25002/
C
ST
• Résolution du PFD
• Transport des torseurs au point : A
• Choix d’un point d’application pour appliquer les PFD : A
{ }
=
02/
AA
S YT { }
=
02/3
DDY
T { }
002/
C
S
{ }
=
=DDADD
D
YYYT
300
0
0
02/3
∧
+⋅=∧+=
D
DDAY
zFADMM0
0
3000
{ }
−−
=
−
=3000000
2500
00
25002/
AC
C
ST
−∧
−+⋅=∧+=
0
2500
120
2000 zFACMM CCA
( ) 2500025000:1 =⇒=−+ XX
Statique Thierry Boulay 55
• Conclusion
( )( )( ) 1000300/300000300000300:3
100000:2
2500025000:1
==⇒=−
−=−=⇒=++
=⇒=−+
DD
DADA
AA
YY
YYYY
XX
{ }
−=
01000
25002/
A
A
ST { }
=01000
02/3
D
DT { }
−
=00
25002/
C
C
ST

Exemple• 4J Résoudre suivant l’ordre prévu
Étude du solide 3• Inventaire des torseurs
{ }
−=
01000
03/2
DT { }
−=
03/4
HF
X
XT { }
=0
3
3/
GG
S Y
XT
• Résolution du PFD
• Transport des torseurs au point : G
• Choix d’un point d’application pour appliquer les PFD : G
{ }
− 010003/2
D
{ }
−
=0
3/4
HFX
T { }
=
033
3/
GG
S YT
{ }
−=
−=
1800001000
0
01000
0
3
3/2
GD
DT
−∧
−+⋅=∧+=
1000
0
15
180033 zFDGMM DDG
{ }
−=
−=
HH
H
GH
H
F
F
XX
X
X
XT
10003
3/4
−∧
−+⋅=∧+=
H
H
FFGX
XzFFGMM
0
100033
Statique Thierry Boulay 56
• Conclusion
( )( )( ) 1800100/1800000100180000:3
80018001000100001000:2
180000:1
33
33
−=−=⇒=+
−=−=+=⇒=+−−
=−=⇒=++
HH
HGGH
HGGH
XX
XYYX
XXXX
{ }
−=
01000
03/2
D
DT { }
−
=01800
18003/4
F
FT { }
−=
0800
1800
3
3/
G
G
ST
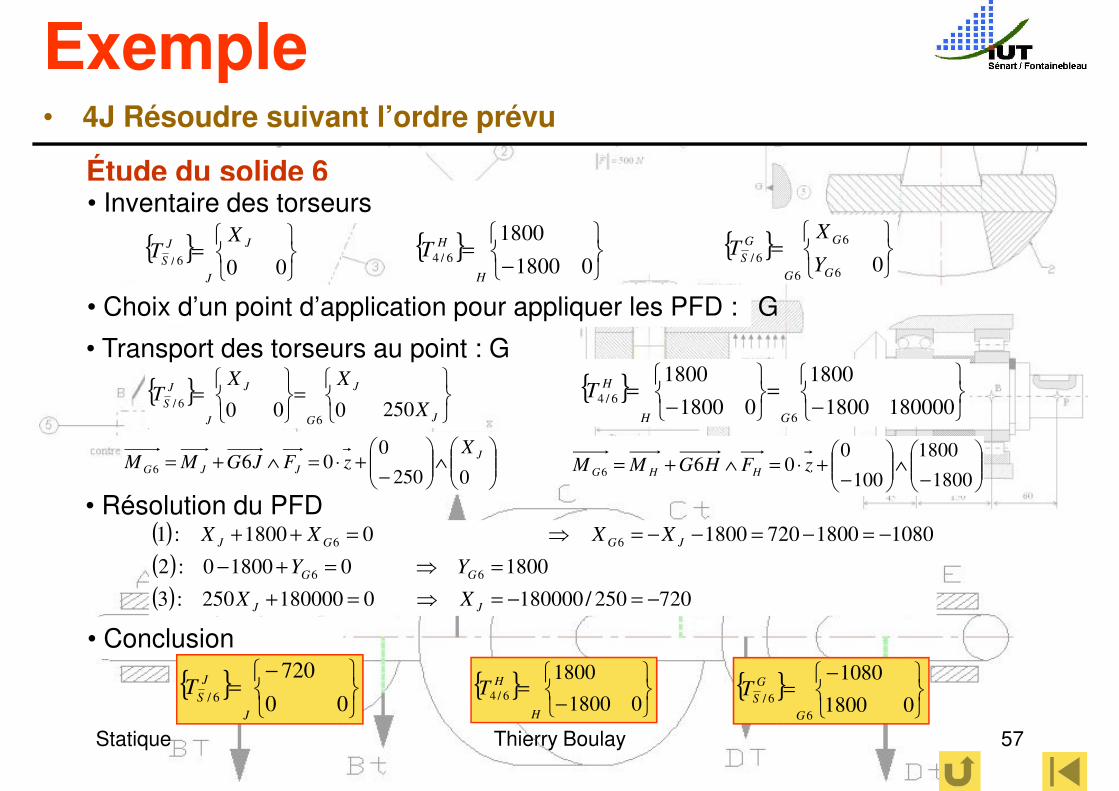
Exemple• 4J Résoudre suivant l’ordre prévu
Étude du solide 6• Inventaire des torseurs
{ }
=00
6/
JJ
S
XT { }
−=
01800
18006/4
HT { }
=0
6
6/
GG
S Y
XT
• Résolution du PFD
• Transport des torseurs au point : G
• Choix d’un point d’application pour appliquer les PFD : G
{ }
006/
J
S{ }
− 018006/4
H 066
6/
GG
S Y
{ }
=
=J
J
G
J
J
J
S X
XXT
2500006
6/
∧
−+⋅=∧+=
0250
0066
J
JJG
XzFJGMM
{ }
−=
−=
1800001800
1800
01800
1800
6
6/4
GH
HT
−∧
−+⋅=∧+=
1800
1800
100
0066 zFHGMM HHG
( ) 10801800720180001800:1 −=−=−−=⇒=++ XXXX
Statique Thierry Boulay 57
• Conclusion
( )( )( ) 720250/1800000180000250:3
1800018000:2
10801800720180001800:1
66
66
−=−=⇒=+
=⇒=+−
−=−=−−=⇒=++
JJ
GG
JGGJ
XX
YY
XXXX
{ }
−
=00
7206/
J
J
ST { }
−=
01800
18006/4
H
HT { }
−
=01800
1080
6
6/
G
G
ST
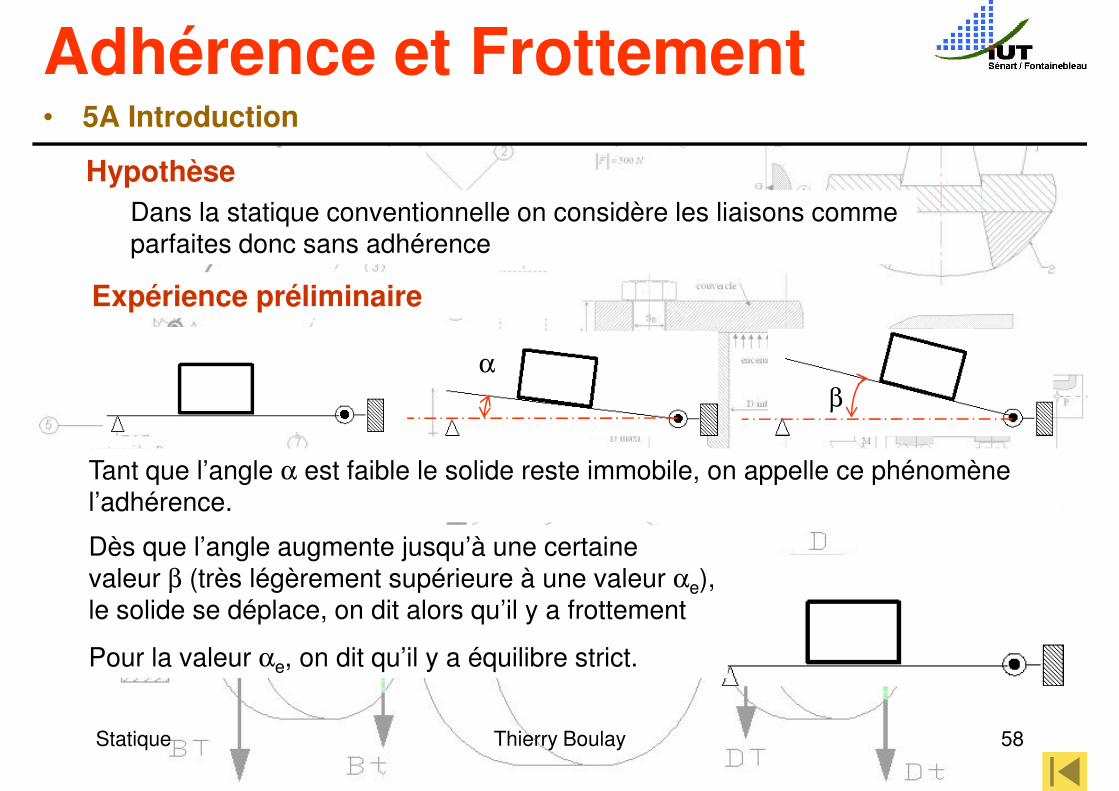
Adhérence et Frottement• 5A Introduction
HypothèseDans la statique conventionnelle on considère les liaisons comme parfaites donc sans adhérence
Expérience préliminaire
β
Tant que l’angle α est faible le solide reste immobile, on appelle ce phénomène l’adhérence.
α
Statique Thierry Boulay 58
Dès que l’angle augmente jusqu’à une certaine valeur β (très légèrement supérieure à une valeur αe), le solide se déplace, on dit alors qu’il y a frottement
Pour la valeur αe, on dit qu’il y a équilibre strict.
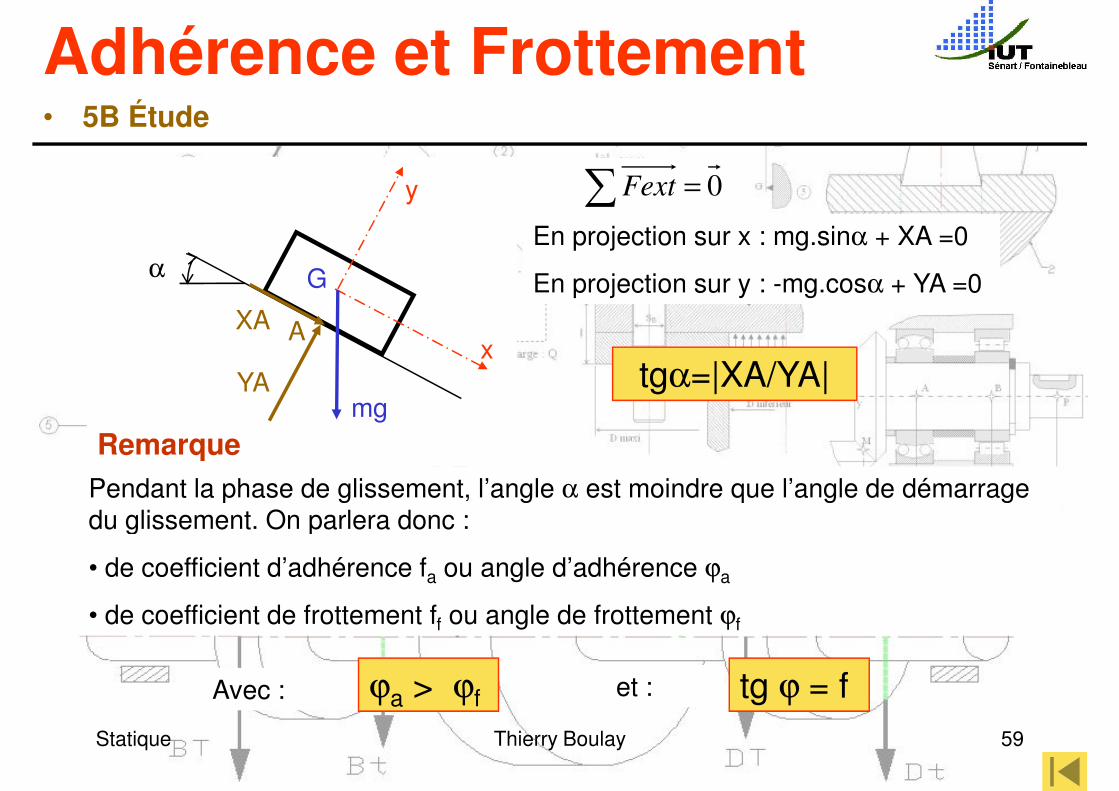
Adhérence et Frottement• 5B Étude
y
α
∑ = 0Fext
En projection sur x : mg.sinα + XA =0
Remarque
Pendant la phase de glissement, l’angle α est moindre que l’angle de démarrage du glissement. On parlera donc :
x
mg
GαEn projection sur y : -mg.cosα + YA =0
tgα=|XA/YA|
XA
YA
A
Statique Thierry Boulay 59
du glissement. On parlera donc :
• de coefficient d’adhérence fa ou angle d’adhérence ϕa
• de coefficient de frottement ff ou angle de frottement ϕf
Avec : ϕa > ϕf et : tg ϕ = f

Adhérence et Frottement• 5C Loi de Coulomb
La force de frottement s’oppose au
mouvement. On écrira 1/21/21/2 .. SSSSSS NtgNfT ϕ==mouvement. On écrira
donc :
1/21/21/2 SSSSSS
Avec :1/2 SST
1/2 SSN
Cône d’adhérence
Effort tangentiel entre les surfaces S2 et S1
Effort normal à la surface entre S2 et S1
ϕ
Statique Thierry Boulay 60
1/2 SSR
Plan tangent aux surfaces
Tant que R est à l’intérieur du cône il y a adhérence
Dès que R est à l’extérieur du cône il y a frottement
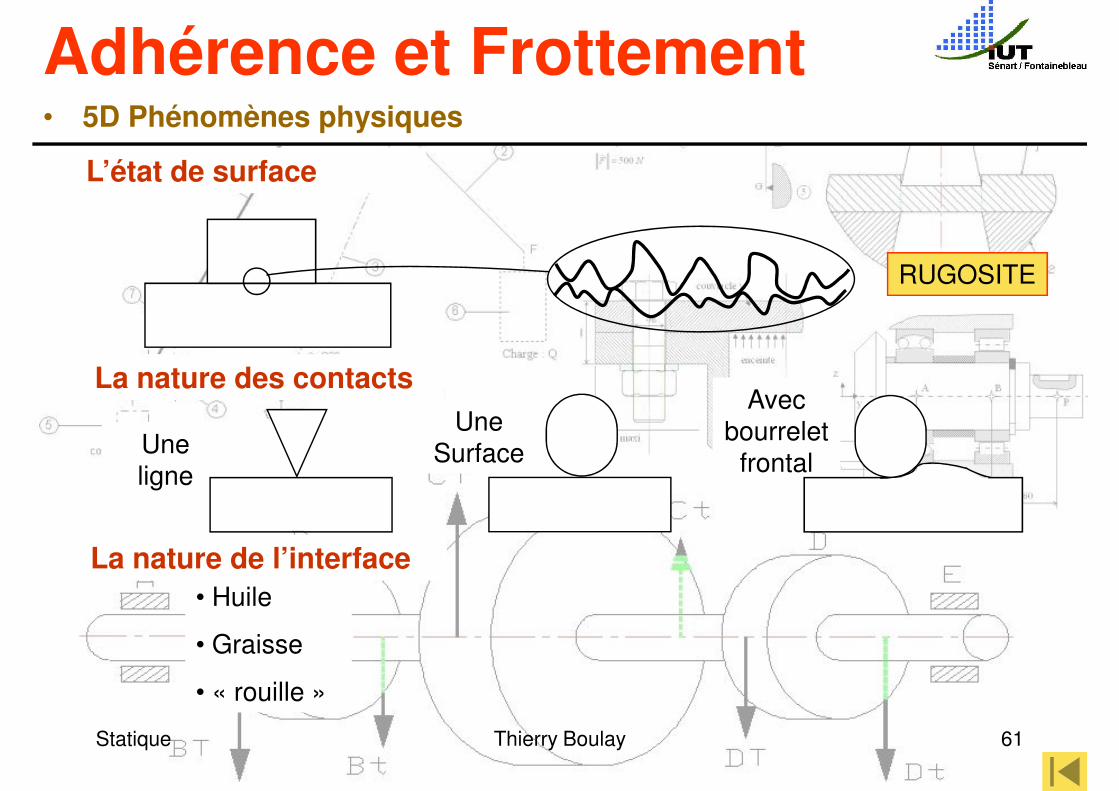
Adhérence et Frottement• 5D Phénomènes physiques
L’état de surface
RUGOSITE
Avec bourrelet
frontalUne ligne
La nature des contacts
Une Surface
RUGOSITE
Statique Thierry Boulay 61
La nature de l’interface• Huile
• Graisse
• « rouille »
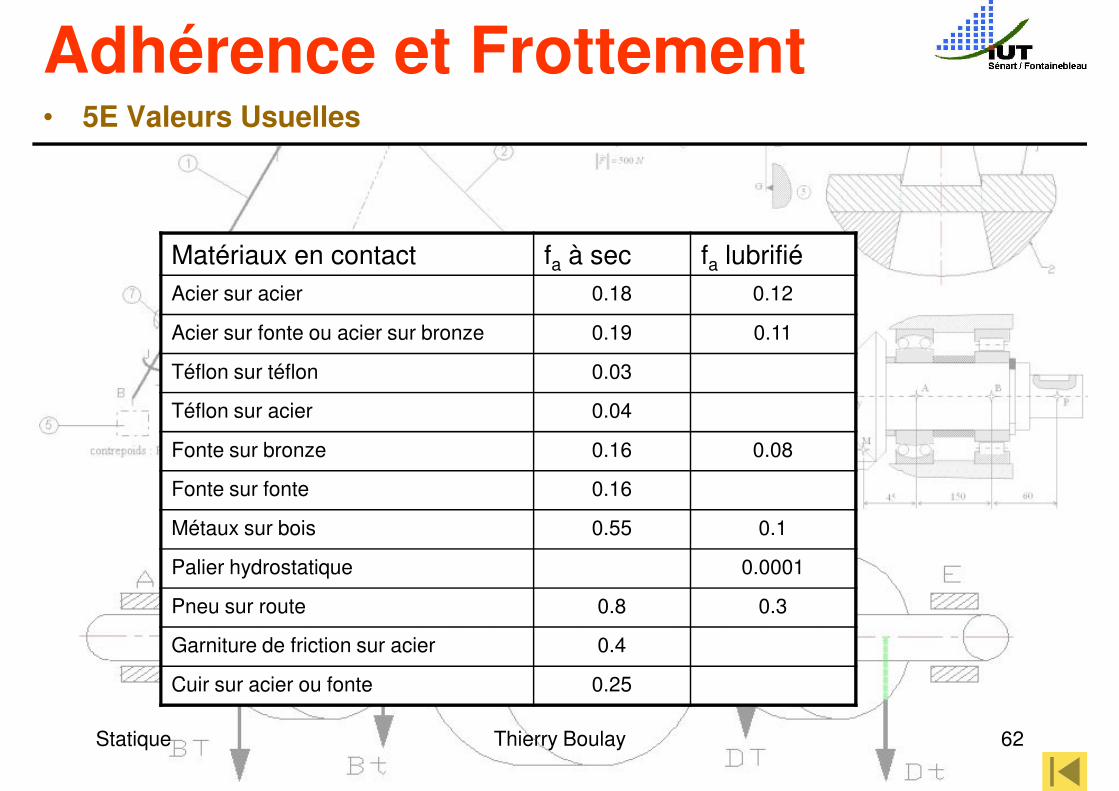
Adhérence et Frottement• 5E Valeurs Usuelles
Matériaux en contact fa à sec fa lubrifiéMatériaux en contact fa à sec fa lubrifiéAcier sur acier 0.18 0.12
Acier sur fonte ou acier sur bronze 0.19 0.11
Téflon sur téflon 0.03
Téflon sur acier 0.04
Fonte sur bronze 0.16 0.08
Fonte sur fonte 0.16
Métaux sur bois 0.55 0.1
Statique Thierry Boulay 62
Métaux sur bois 0.55 0.1
Palier hydrostatique 0.0001
Pneu sur route 0.8 0.3
Garniture de friction sur acier 0.4
Cuir sur acier ou fonte 0.25
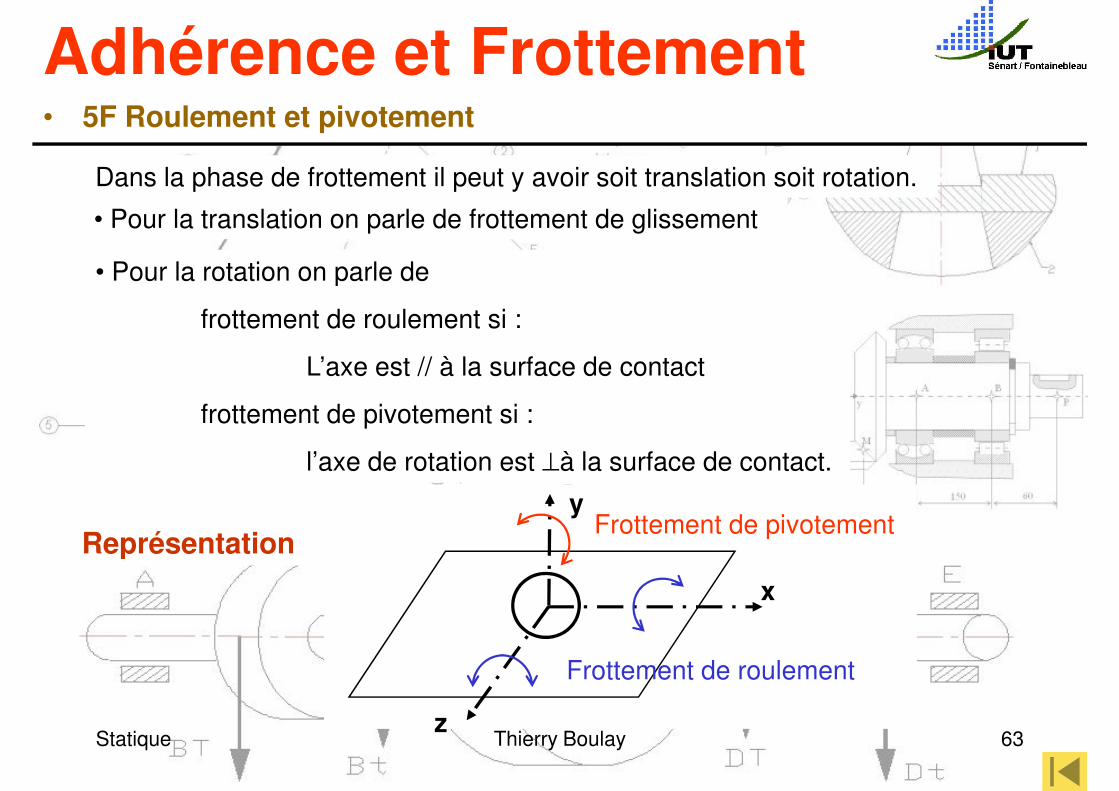
Adhérence et Frottement• 5F Roulement et pivotement
Dans la phase de frottement il peut y avoir soit translation soit rotation.
• Pour la rotation on parle de
• Pour la translation on parle de frottement de glissement
Représentation
• Pour la rotation on parle de
frottement de roulement si :
L’axe est // à la surface de contact
frottement de pivotement si :
l’axe de rotation est ⊥à la surface de contact.
yFrottement de pivotement
Statique Thierry Boulay 63
Représentation
x
z
Frottement de roulement
Frottement de pivotement
Liaisons non parfaites• 6A Préliminaire
Dans le domaine de la mécanique il existe deux liaisons essentielles que l’on rencontre dans tous les systèmes, il s’agit de :
• La liaison pivot avec prise en compte du frottement• La liaison pivot avec prise en compte du frottement
• La liaison glissière avec prise en compte du frottement
En revanche la technologie utilisée pour les réaliser va générer des imperfections qu’il convient d’analyser pour s’assurer que le modèle initial correspond au modèle choisi.
La liaison pivot est en fonction de la vitesse de rotation soit réalisée par des paliers lisses (grandes vitesses) soit par des roulements (vitesses faibles).
Statique Thierry Boulay 64
paliers lisses (grandes vitesses) soit par des roulements (vitesses faibles).
La liaison glissière est en fonction de la vitesse linéaire et des pressions de contacts soit réalisée par des contacts directs (⇔ aux paliers) soit par des éléments roulants (⇔ aux roulements).

Liaisons non parfaites• 6B Liaison pivot
En fonction du type de lubrification on rencontre deux phénomènes :
� Le régime onctueux
Par palier
� Le régime onctueux
� Le régime hydrodynamique
Le régime onctueux dans le cas des graissages ou huilages « naturels » par barbotage, gravité,…
Le régime hydrodynamique dans le cas des graissages ou huilages « pilotés » par pression.
Statique Thierry Boulay 65

Liaisons non parfaites• 6B Liaison pivot
On utilise des paliers massifs
Les coefficients de frottement rencontrés sont :
Par palier en régime onctueuxIl s’agit ici du coefficient
de frottement de glissement
Les coefficients de frottement rencontrés sont :
Matériauxff
À sec lubrifié
Acier / bronze 0.15 0.1
Acier / acier 0.15 – 0.2 0.1
Fonte / fonte 0.15 0.1
Acier / nylon 0.02 – 0.11
Acier / téflon 0.05 – 0.15
glissement
Statique Thierry Boulay 66
Acier / téflon 0.05 – 0.15
La puissance consommée par le palier vaut :
ω⋅⋅⋅= rfNP f
Force en (N)
Rayon de l’arbre en (m)
Vitesse angulaire en rad/s
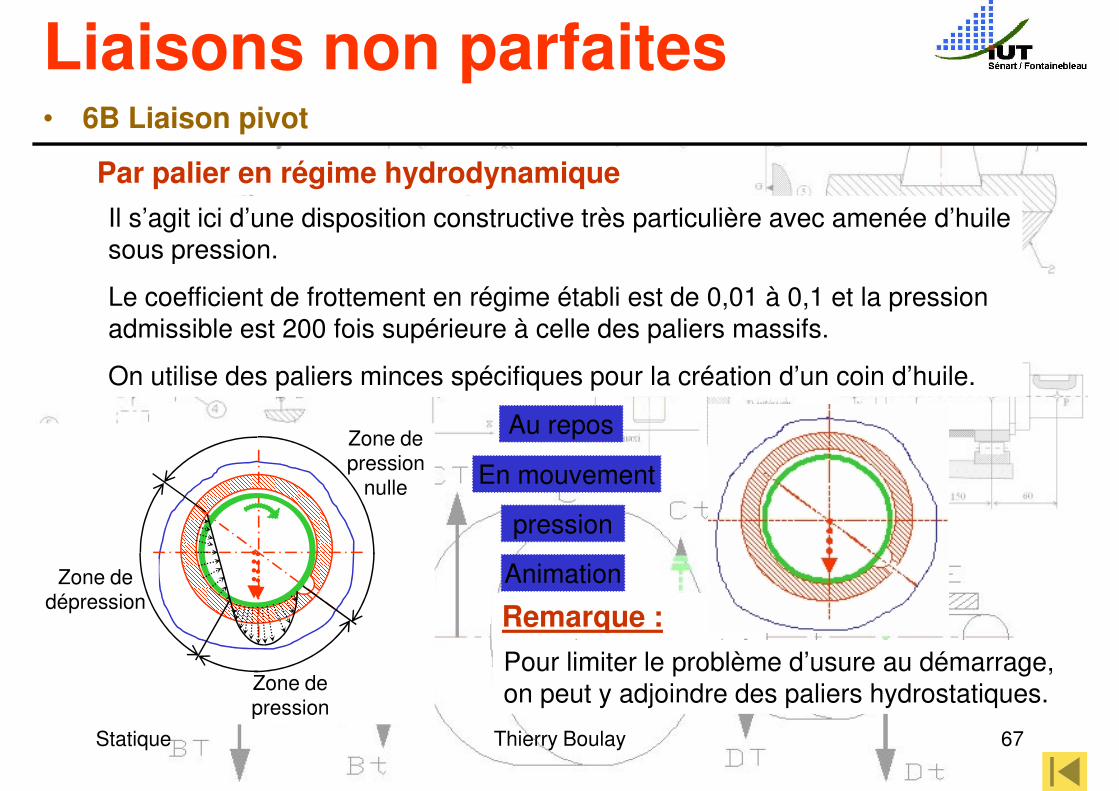
Liaisons non parfaites• 6B Liaison pivot
Il s’agit ici d’une disposition constructive très particulière avec amenée d’huile sous pression.
Par palier en régime hydrodynamique
sous pression.
Le coefficient de frottement en régime établi est de 0,01 à 0,1 et la pression admissible est 200 fois supérieure à celle des paliers massifs.
On utilise des paliers minces spécifiques pour la création d’un coin d’huile.
Au repos
En mouvement
pression
Zone de pression
nulle
Statique Thierry Boulay 67
Pour limiter le problème d’usure au démarrage, on peut y adjoindre des paliers hydrostatiques.
Remarque :
pression
Zone de dépression
Zone de pression
Animation

Liaisons non parfaites• 6B Liaison pivot
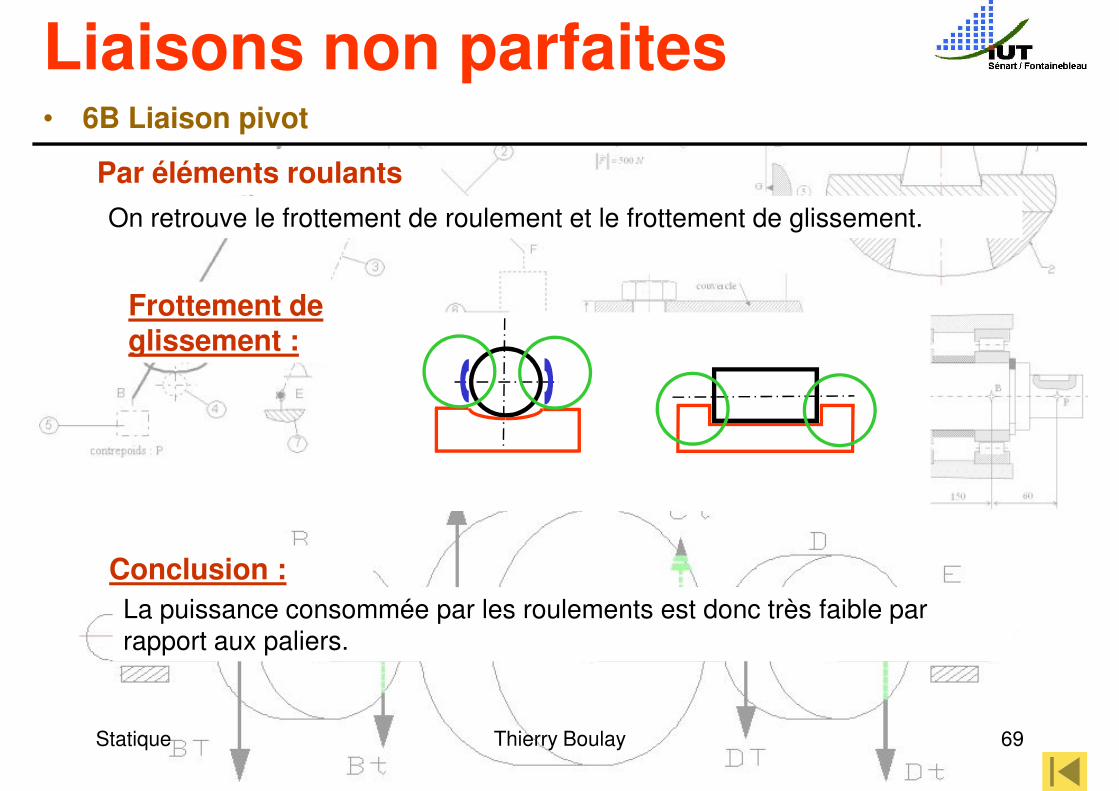
On retrouve le frottement de roulement et le frottement de glissement.
Par éléments roulants
r : rayon
Le coefficient de frottement de roulement est δ et vaut :
δ
Bille ou rouleau
Bague intérieure
r : rayon de la bille
Remarque :
Frottement de roulement :
Statique Thierry Boulay 68
matériaux δ (mm)
Acier trempé / acier trempé 0,0005 – 0,001
Fonte grise / acier trempé 0,05
Pneu / chaussée 0,5 - 2
Le coefficient de frottement de roulement est 100 fois plus petit que le coefficient de glissement. La puissance consommée par le roulement est donc très faible par rapport aux paliers.
Remarque :
Liaisons non parfaites• 6B Liaison pivot
On retrouve le frottement de roulement et le frottement de glissement.
Par éléments roulants
Frottement de glissement :
Statique Thierry Boulay 69
La puissance consommée par les roulements est donc très faible par rapport aux paliers.
Conclusion :

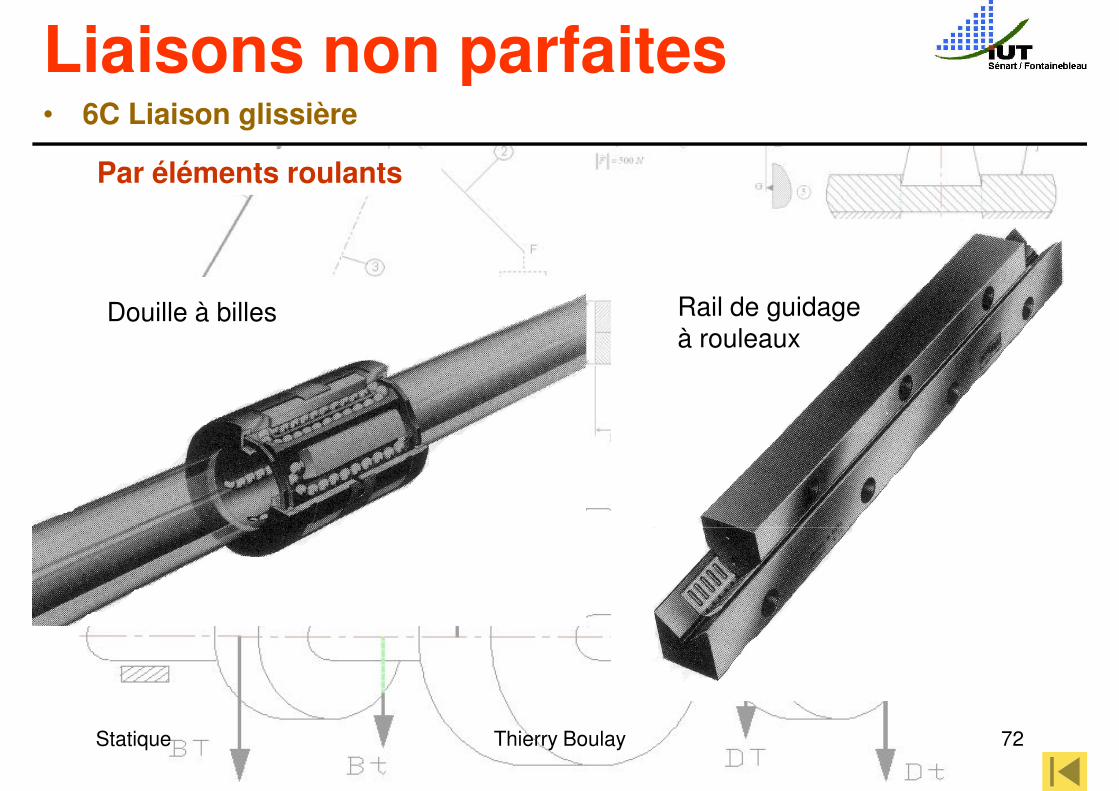
Liaisons non parfaites• 6C Liaison glissière
Il s’agit ici de faire glisser de façon linéaire un élément par rapport à un rail.
On retrouve les mêmes problèmes que pour la liaison pivot. La seule différence est la non utilisation de la lubrification hydrodynamique. En effet la non continuité de la vitesse ne permet pas d’assurer une lubrification économique entre les deux éléments.
La liaison glissière est en fonction de la vitesse linéaire et des pressions de
Statique Thierry Boulay 70
La liaison glissière est en fonction de la vitesse linéaire et des pressions de contacts soit réalisée par des contacts directs (⇔ aux paliers) soit par des éléments roulants (⇔ aux roulements).

Liaisons non parfaites• 6C Liaison glissière
Par paliers
Il existe deux solutions simples à mettre en œuvre :
�Par formes complémentaires : Clavette�Par formes complémentaires :
�Avec deux cylindres en //
Clavette
Cannelure
Méplat
!Hyperstatique
Statique Thierry Boulay 71
Remarque :
L’ajustement entre les solides est du type H7g6 ; H7f8 …
Pour un bon fonctionnement, donc éviter l’arc-boutement, il faut L ≥ 2.D
Hyperstatique
Liaisons non parfaites• 6C Liaison glissière
Par éléments roulants
Douille à billes Rail de guidage à rouleaux
Statique Thierry Boulay 72
• Mécanique Statique I – Méthode Analytique : par JP. Larralde chez MASSON
Bibliographie
chez MASSON • Guide de Mécanique : par JL. Fanchon chez NATHAN• Construction Mécanique : par F. Esnault chez DUNOD• La Mécanique par les Problèmes – STATIQUE : par A. Campa,
R. Chappert, R. Picand chez FOUCHER• Statique : par JL. Meriam, LG. Kraige chez REYNAUD GOULET INC.• Conception des machines 1 statique : par G. Spinnler chez PRESSES POLYTECHNIQUES ET UNIVERTAIRES ROMANDES• Systèmes Mécaniques : par M. Aublin, R. Boncompain,… chez DUNOD• Mécanique et Automatique : par R. Papanicola chez ELLIPSES
Statique Thierry Boulay 73
• Mécanique et Automatique : par R. Papanicola chez ELLIPSES• Mécanique des solides rigides : JM Berthelot chez Tec & Doc•….
Merci à eux…
La statique n’est aucunement une fin en soi elle est seulement indispensable dans l’étude des mécanismes car elle est à la base de tout….
Conclusion
l’étude des mécanismes car elle est à la base de tout….
Comment ouvrir une porte ou déboucher un crayon si l’on ne sait pas modéliser le système et calculer les efforts qu’il faut exercer et qu’il engendre…!
Alors à vos crayons, et travailler non pas pour subir le système mais pour l’observer, le comprendre, l’analyser et agir.
Vous pouvez retrouver l’intégralité de ce cours et d’autres ainsi
Statique Thierry Boulay 74
que des TD, DS et TP sur le site :
http://thierryboulay.free.fr
Travail, Comportement et participation
Ils font l’objet d’une note, calculée tout au long du semestre et validée dans la moyenne au moment du jury.
Cette note est établie de la façon suivante : Cette note est établie de la façon suivante :
Chacun d’entre vous commence le semestre avec 10/20.
Une bonne participation, un comportement positif, des progrès dans le travail, des initiatives intéressantes, etc. seront récompensés de points positifs.
Tout manque de soin, d’oubli du travail, de comportement gênant ou désagréable, tout refus de participer, travailler etc. seront sanctionnés par des points négatifs.
Statique Thierry Boulay 75
par des points négatifs.
Date : Lu et approuvé, signature
Nom Prénom :
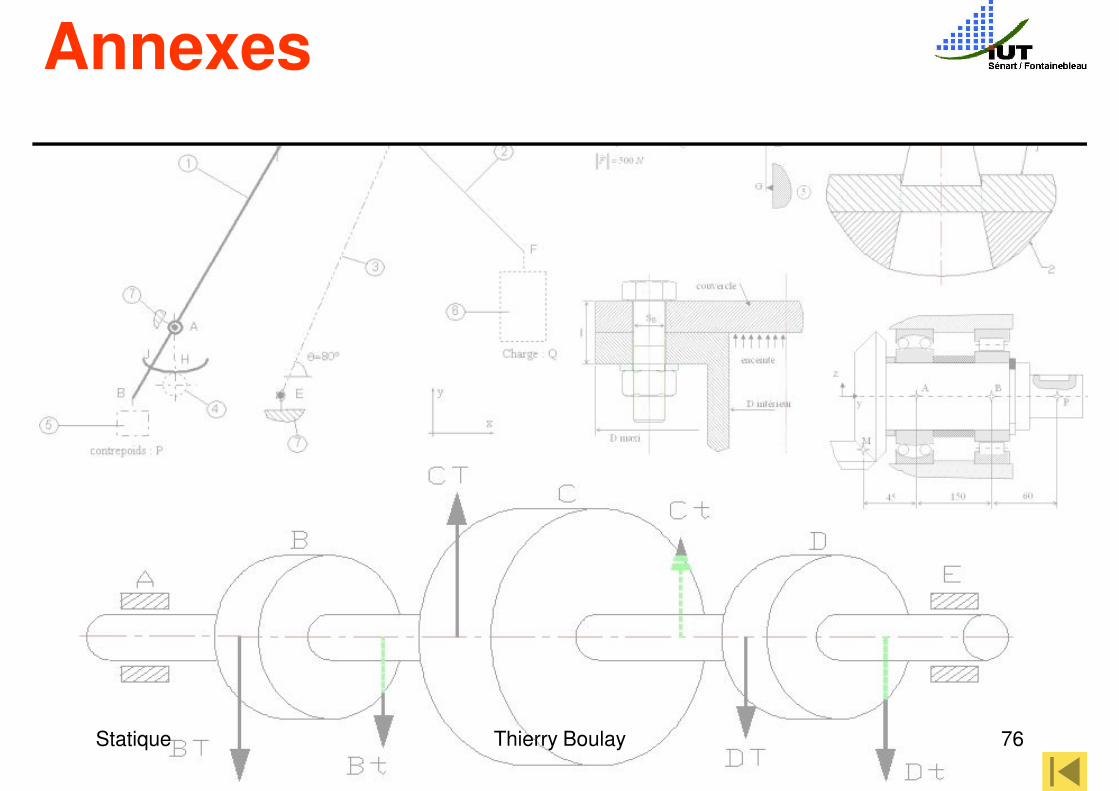
Annexes
Statique Thierry Boulay 76
( ( (
) [ ]X
S
SX
SY
XS
A
J
JG
G
GC
−
2
00000
2500
3
3
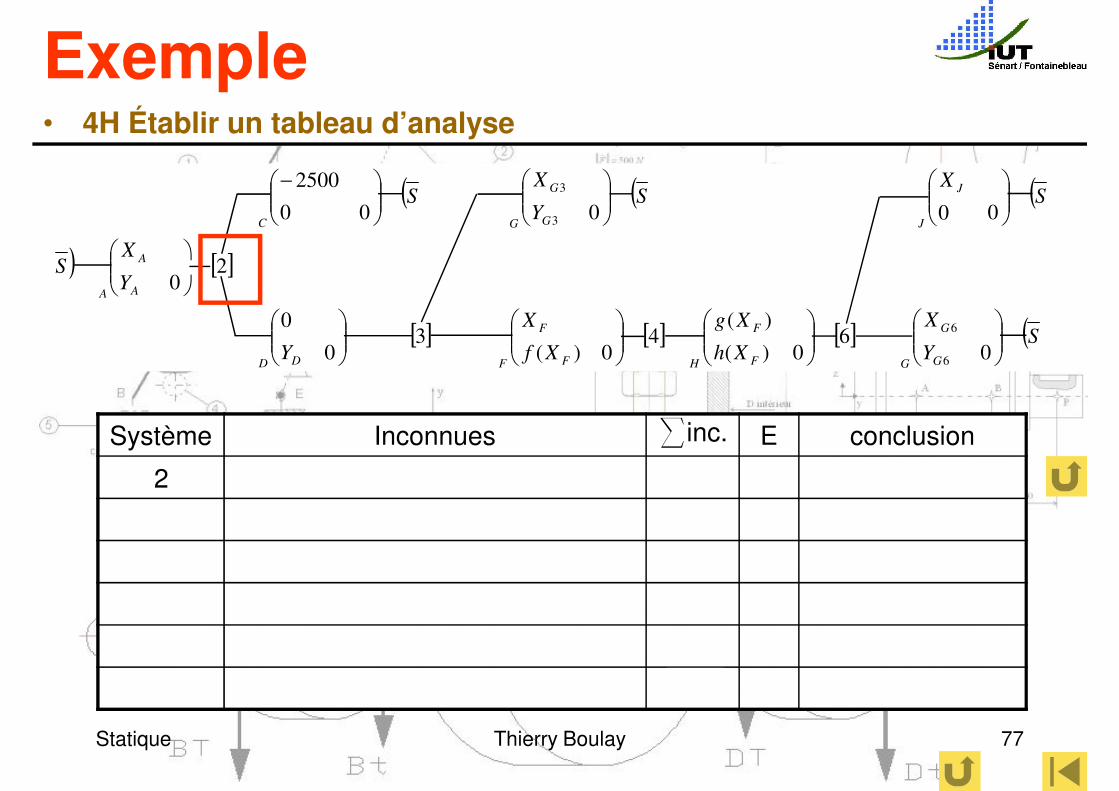
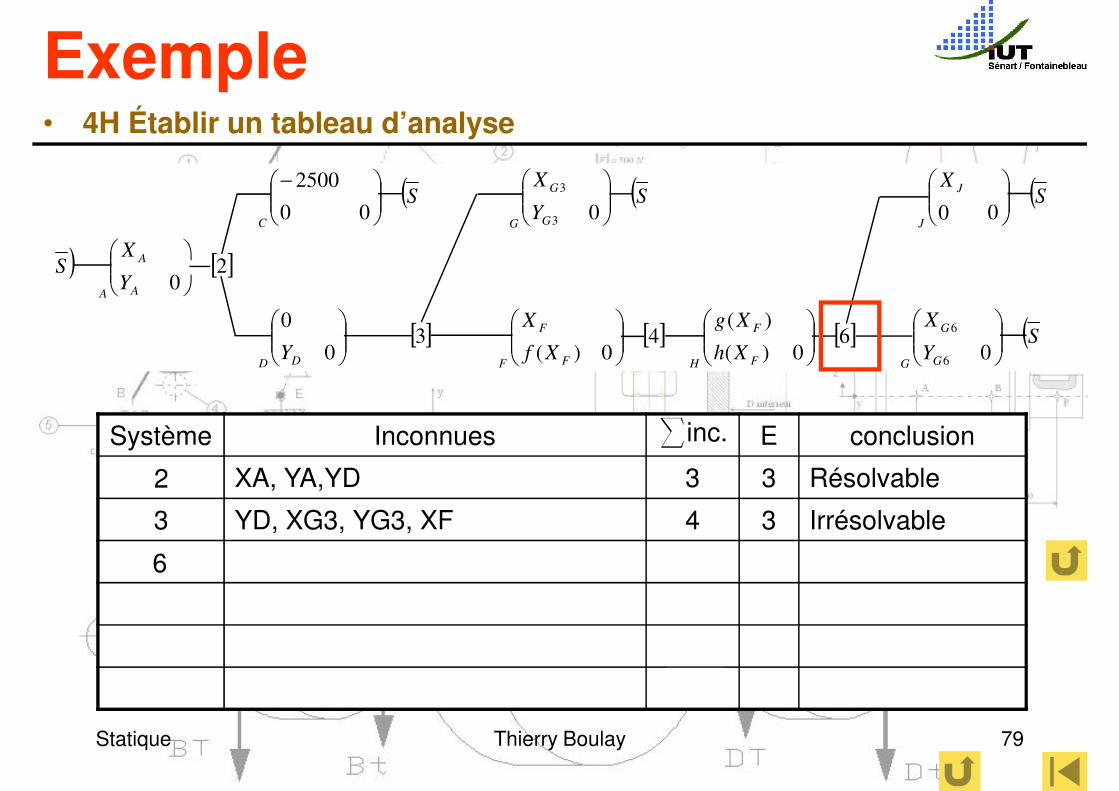
Exemple• 4H Établir un tableau d’analyse
) [ ]
[ ] [ ] [ ] (SY
X
Xh
Xg
Xf
X
Y
YS
G
G
GF
F
HF
F
FDD
A
A
A
06
0)(
)(4
0)(3
0
0
20
6
6
Système Inconnues ninc. E conclusion
XA, YA,YD 3 3 Résolvable
YD, XG3, YG3, XF 4 3 Irrésolvable
2
Statique Thierry Boulay 77
YD, XG3, YG3, XF 4 3 Irrésolvable
XF, XJ, XG6, YG6 4 3 Irrésolvable
XA, YA, XG3, YG3, XF 5 3 Irrésolvable
XG3, YG3, YD, XJ, XG6, YG6 6 3 Irrésolvable
XA, YA, XG3, YG3, XJ, XG6, YG6 7 3 Irrésolvable
( ( (
) [ ]X
S
SX
SY
XS
A
J
JG
G
GC
−
2
00000
2500
3
3
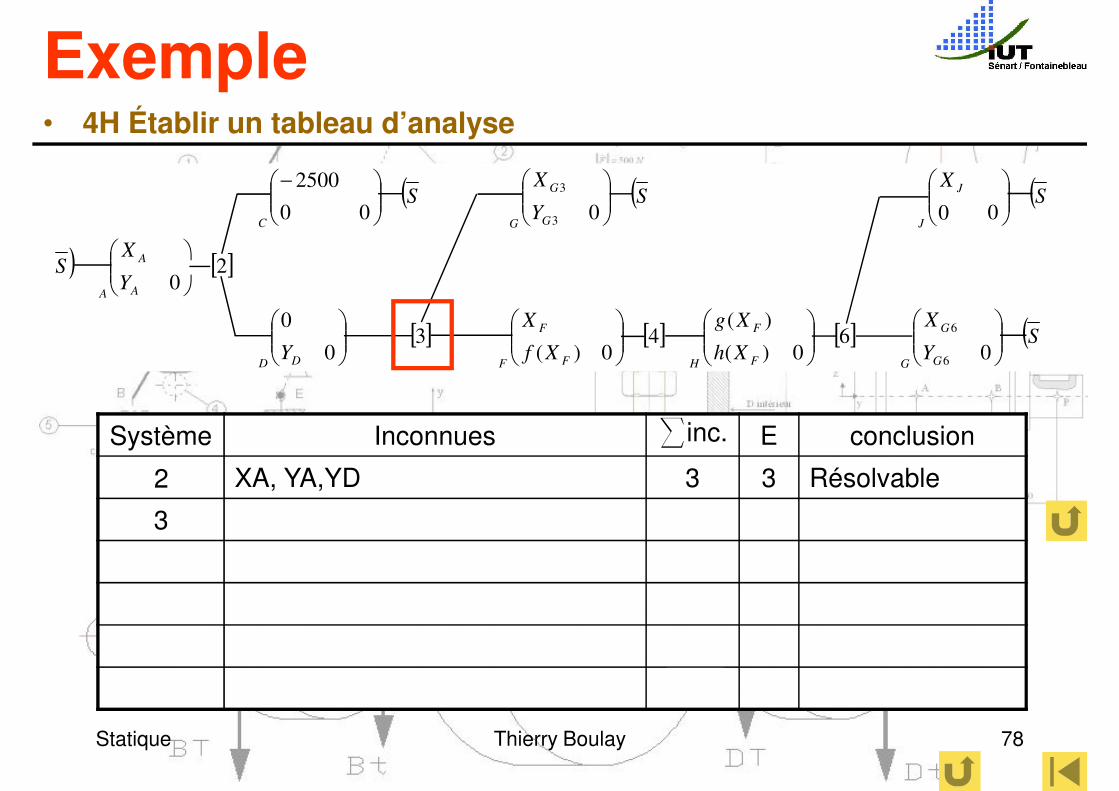
Exemple• 4H Établir un tableau d’analyse
) [ ]
[ ] [ ] [ ] (SY
X
Xh
Xg
Xf
X
Y
YS
G
G
GF
F
HF
F
FDD
A
A
A
06
0)(
)(4
0)(3
0
0
20
6
6
Système Inconnues ninc. E conclusion
XA, YA,YD 3 3 Résolvable
YD, XG3, YG3, XF 4 3 Irrésolvable
2
3
Statique Thierry Boulay 78
YD, XG3, YG3, XF 4 3 Irrésolvable
XF, XJ, XG6, YG6 4 3 Irrésolvable
XA, YA, XG3, YG3, XF 5 3 Irrésolvable
XG3, YG3, YD, XJ, XG6, YG6 6 3 Irrésolvable
XA, YA, XG3, YG3, XJ, XG6, YG6 7 3 Irrésolvable
3
( ( (
) [ ]X
S
SX
SY
XS
A
J
JG
G
GC
−
2
00000
2500
3
3
Exemple• 4H Établir un tableau d’analyse
) [ ]
[ ] [ ] [ ] (SY
X
Xh
Xg
Xf
X
Y
YS
G
G
GF
F
HF
F
FDD
A
A
A
06
0)(
)(4
0)(3
0
0
20
6
6
Système Inconnues ninc. E conclusion
XA, YA,YD 3 3 Résolvable
YD, XG3, YG3, XF 4 3 Irrésolvable
2
3
Statique Thierry Boulay 79
YD, XG3, YG3, XF 4 3 Irrésolvable
XF, XJ, XG6, YG6 4 3 Irrésolvable
XA, YA, XG3, YG3, XF 5 3 Irrésolvable
XG3, YG3, YD, XJ, XG6, YG6 6 3 Irrésolvable
XA, YA, XG3, YG3, XJ, XG6, YG6 7 3 Irrésolvable
3
6
( ( (
) [ ]X
S
SX
SY
XS
A
J
JG
G
GC
−
2
00000
2500
3
3
Exemple• 4H Établir un tableau d’analyse
) [ ]
[ ] [ ] [ ] (SY
X
Xh
Xg
Xf
X
Y
YS
G
G
GF
F
HF
F
FDD
A
A
A
06
0)(
)(4
0)(3
0
0
20
6
6
Système Inconnues ninc. E conclusion
XA, YA,YD 3 3 Résolvable
YD, XG3, YG3, XF 4 3 Irrésolvable
2
3
Statique Thierry Boulay 80
YD, XG3, YG3, XF 4 3 Irrésolvable
XF, XJ, XG6, YG6 4 3 Irrésolvable
XA, YA, XG3, YG3, XF 5 3 Irrésolvable
XG3, YG3, YD, XJ, XG6, YG6 6 3 Irrésolvable
XA, YA, XG3, YG3, XJ, XG6, YG6 7 3 Irrésolvable
3
6
2U3
( ( (
) [ ]X
S
SX
SY
XS
A
J
JG
G
GC
−
2
00000
2500
3
3
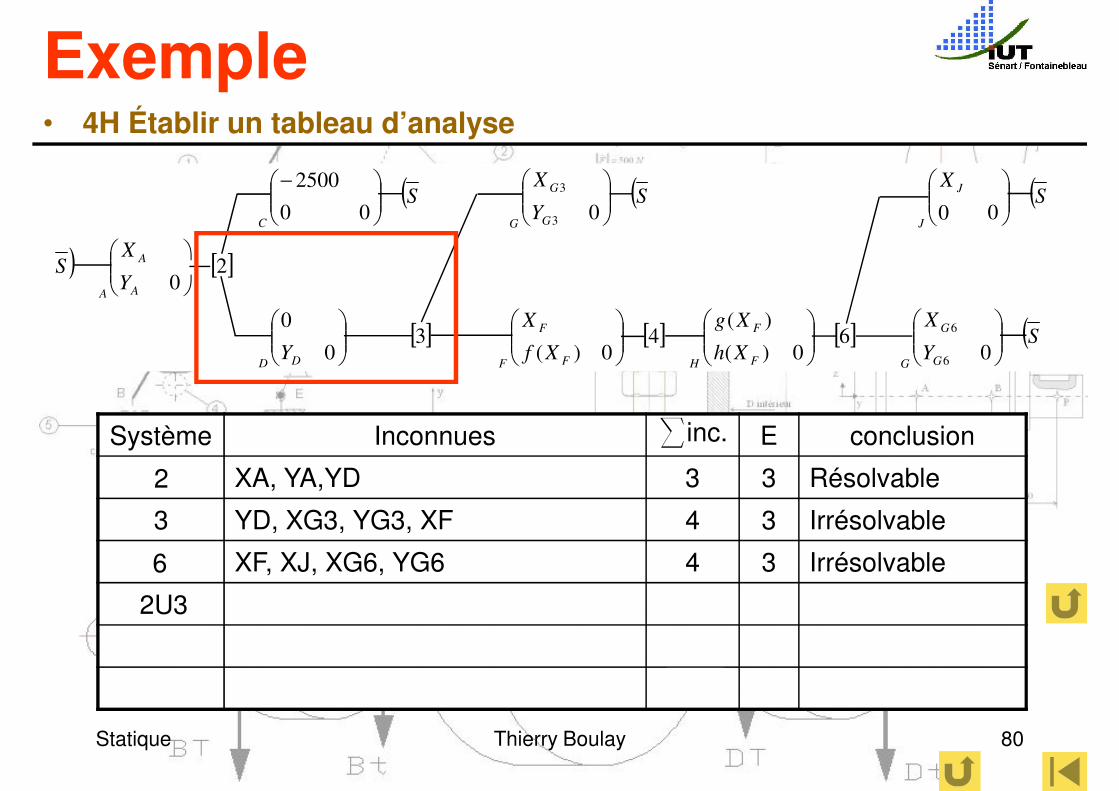
Exemple• 4H Établir un tableau d’analyse
) [ ]
[ ] [ ] [ ] (SY
X
Xh
Xg
Xf
X
Y
YS
G
G
GF
F
HF
F
FDD
A
A
A
06
0)(
)(4
0)(3
0
0
20
6
6
Système Inconnues ninc. E conclusion
XA, YA,YD 3 3 Résolvable
YD, XG3, YG3, XF 4 3 Irrésolvable
2
3
Statique Thierry Boulay 81
YD, XG3, YG3, XF 4 3 Irrésolvable
XF, XJ, XG6, YG6 4 3 Irrésolvable
XA, YA, XG3, YG3, XF 5 3 Irrésolvable
XG3, YG3, YD, XJ, XG6, YG6 6 3 Irrésolvable
XA, YA, XG3, YG3, XJ, XG6, YG6 7 3 Irrésolvable
3
6
2U3
3U4U6
( ( (
) [ ]X
S
SX
SY
XS
A
J
JG
G
GC
−
2
00000
2500
3
3
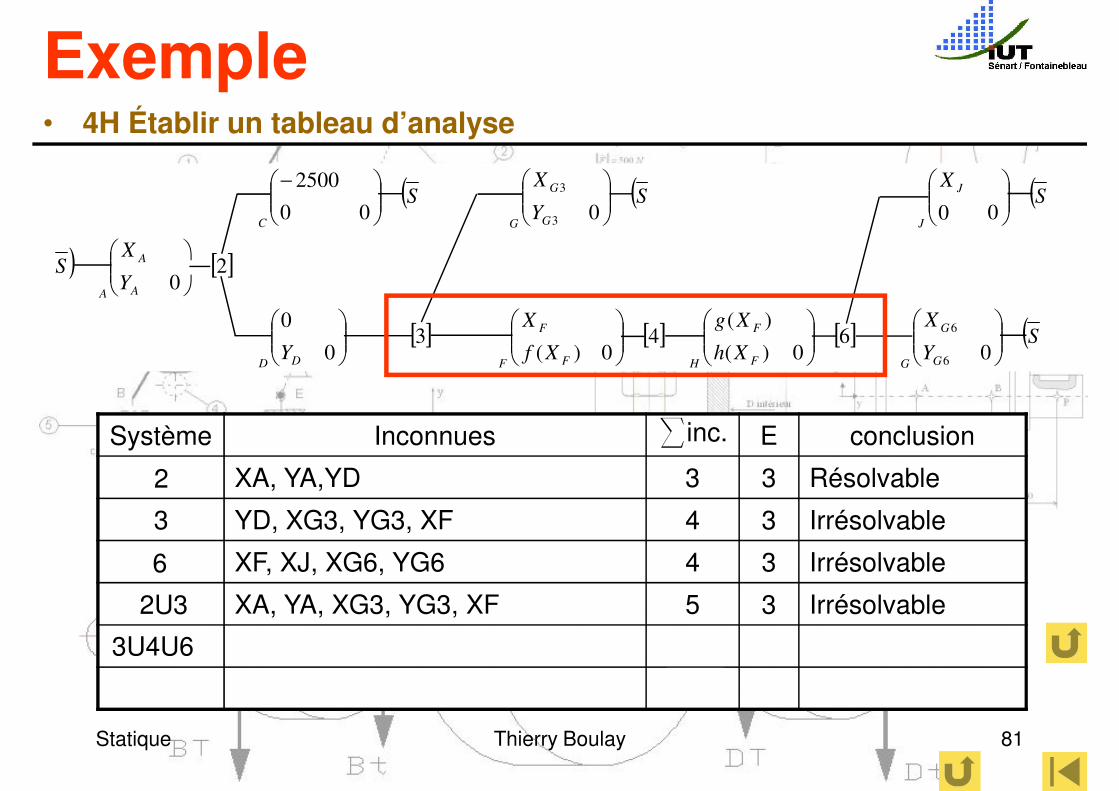
Exemple• 4H Établir un tableau d’analyse
) [ ]
[ ] [ ] [ ] (SY
X
Xh
Xg
Xf
X
Y
YS
G
G
GF
F
HF
F
FDD
A
A
A
06
0)(
)(4
0)(3
0
0
20
6
6
Système Inconnues ninc. E conclusion
XA, YA,YD 3 3 Résolvable
YD, XG3, YG3, XF 4 3 Irrésolvable
2
3
Statique Thierry Boulay 82
YD, XG3, YG3, XF 4 3 Irrésolvable
XF, XJ, XG6, YG6 4 3 Irrésolvable
XA, YA, XG3, YG3, XF 5 3 Irrésolvable
XG3, YG3, YD, XJ, XG6, YG6 6 3 Irrésolvable
XA, YA, XG3, YG3, XJ, XG6, YG6 7 3 Irrésolvable
3
6
2U3
3U4U6
TOUT