SMA et SMIOn se propose de mesurer T correspondant à 10 oscillations d’un pendule de torsion à...
32
1 Semestre 1– Module Physique 1 – mécanique 1 FILIERES : SMA et SMI Semestre 1 Année universitaire 2017-2018 Réalisé par : Pr. BENHMIDA Abdellatif Fascicule TP en ligne : Site : http://www.fsdmfes.ac.ma/ (voir ressources pédagogiques/filière SMA/SMI/S1/)
Transcript of SMA et SMIOn se propose de mesurer T correspondant à 10 oscillations d’un pendule de torsion à...
1
Semestre 1– Module Physique 1 – mécanique 1
FILIERES : SMA et SMI
Semestre 1
Année universitaire 2017-2018
Réalisé par :
PPrr.. BBEENNHHMMIIDDAA AAbbddeellllaattiiff
Fascicule TP en ligne :
Site : http://www.fsdmfes.ac.ma/ (voir ressources pédagogiques/filière SMA/SMI/S1/)

2
TABLES DES MATIERES
Généralités 3
I. Erreurs et Incertitudes 13 (Préparé et Réalisé par le Pr. A. BENHMIDA, FSDM-FES-Dépt.Phys. En 2014/2015)
II. Pendule simple 21 (Préparé et Réalisé par le Pr. A. BENHMIDA, FSDM-FES-Dépt.Phys. En 2014/2015)
III. Etude du mouvement de rotation 24 (Préparé et Réalisé par le Pr. A. BENHMIDA, FSDM-FES-Dépt.Phys. En 2014/2015)

3
GENERALITES
Effectuer la mesure d’une grandeur physique revient à comparer une
grandeur inconnue par rapport à une autre qui est connue (exemple : mesure
d’une longueur avec un mètre).
Cependant, la comparaison directe entre deux grandeurs physiques de
même espèce dont l’une reste à déterminer n’est pas toujours possibles ; on peut
alors passer par une relation ( loi physique) qui lie la grandeur recherchée et
d’autre grandeurs connues que l’on peut mesurer sans difficultés.
Pratiquement. On a recours à certaines méthodes expérimentales et à des
appareils adéquats pour déterminer la grandeur recherchée. Ces méthodes et
appareillages n’étant évidement pas parfois ; la grandeur ne peut être déterminée
qui de manière approchée. Le choix des méthodes et appareil dépend de la
précision que l’on désire obtenir ; en effet, il est évident que la précision ne sera
pas la même selon qu’on mesure une épaisseur d’une plaque par exemple avec
un pied à coulisse ou avec une règle graduée au millimètre.
Nous avons évoqué que si la mesure ne pouvait pas être effectuée de
manière directe, on pouvait la déduire à partir d’une loi physique.
Cependant, les relations qui traduisent ces lois physiques font intervenir des
coefficients numériques dans l’expression mathématique.
Ces coefficients dépendent des unités que l’on choisit, d’où la nécessité de
définir un système d’unités.
I. INCERTITUDE DE MESURES.
Dans l’estimation de l’incertitude d’une grandeur mesurée plusieurs fois,
on peut distinguer plusieurs cas.
I.1. Premier cas.
Le cas où l’appareil possède une précision supérieure ou égale à la
fluctuation de la grandeur mesurée, il faut alors effectuer plusieurs mesures,

4
prendre la moyenne arithmétique et déterminer l’incertitude en prenant le plus
grand écart entre cette valeur moyenne et les différentes valeurs mesurées.
Exemple 1 :
On se propose de mesurer T correspondant à 10 oscillations d’un pendule
de torsion à l’aide d’un chronomètre sur lequel on a une incertitude de lecture
0.1s.( = 0.1s).
On effectue plusieurs mesures qui donnent :
1 = 42.6s, 2 =41.8s, 3 =43.4s, 4 =41.8s, 5 =43.0s
Tm = 5
0.438.414.438.416.42 = 42.52s
m1 = 0.08s, m2 = 0.72s, m3 = 0.88s
m4 = 0.72s, m5 = 0.48s.
Le plus grand écart entre la valeur moyenne et les valeurs mesurées est :
Sup. m4 = m9 = 0.88s (i variant de 1 à 5).
L’incertitude absolue est alors à = 0.88s.
On constate que est supérieure à l’incertitude de lecture ( s1.0 ). La valeur
du temps mesuré et de son incertitude s’écrivent alors :
sm )(
Soit : ss)9.05.42(
Exemple 2 :
On se propose de mesurer un courant I à l’aide d’un ampèremètre. En
plaçant le calibre de l’ampèremètre sur la position de 10 l’aiguille se stabilise
vers la 56 ème division de l’échelle graduée de 1 à 100.
Les relations qui permettent le calcul de I et I sont :
Nb. de divisions lues x calibre
I =
Nb.tot. de division de l’échelle de lecture
L’erreur sur I est donnée par :
I = I Lecture +I systématique avec :
I systématique = (classe x calibre /100)

5
0.5 division x calibre
N.b tot. de division de l’échelle de lecture
Application Numérique :
Ax
5.6100
1065
syst Ax
15.0100
105.1
lect Ax
05.0100
105.0
A)2.05.6(
: 1 Remarque
L’incertitude absolue systématique est constante pour un calibre donné.
Remarque 2 :
Il faut choisir le calibre toujours de telle sorte que l’on ait la plus grande
déviation possible de l’aiguille en veillant toute fois à ne pas sortir des limites du
cadran. Ainsi, si on effectue des lectures sur un ampèremètre dont les calibres
sont : 0.01; 0.3; 1; 10.
Un courant de 0.2A sera lu sur le calibre 0.3.
Un courant de 0.8A sera lu sur le calibre 1.
Un courant de 4.6 A sera lu sur le calibre 10.
II. CALCUL D’INCERTITUDE.
En général, la mesure d’une grandeur G s’effectue par la mesure d’autres
grandeurs physiques intermédiaire (x, y, z, u, v) indépendantes.
Le grandeur G est alors définie par : G= G(x, y, z, u, v)
Connaissant les incertitudes de mesure de (x, y, z, u, v) on détermine les
incertitudes absolue G et relative G
G.

6
II.1. Principe du calcul
II.1.1. Cas d’une seule variable.
On détermine la valeur de G(x) à partir de la mesure de la grandeur x. Soit
x l’incertitude absolue associée à x.
Soit dG la différentielle de G définie par : dG = G'(xo)dx
G'(xo) est la dérivée de G par rapport à x au point xo (valeur mesurée de x). dG
et dx sont des valeurs positives ou négatives alors que G et x sont positives.
G xxoG )('
Exemple.
Calculer l’incertitude sur le moment d’inertie I sachant que le rayon r
est mesuré avec une incertitude r . La masse est supposée connue de manière
exacte ( m = 0).
On a I= mr2 donc dI=m.(2rdr) et rrm .2
Application numérique :
m= 1kg, r= 0.20m donc I = 0.04 kg.m2
si r= 0.01m alors I= ( 2x1x 0.20) x 0.01= 4 10-3
kg.m2.
II.1.2 Cas de plusieurs variables.
Soit G= G( x, y, z, u, v, w,…..) la grandeur dont on veut déterminer la
valeur et sont incertitude.
Soient x, y, z, u, v, w, ….les grandeurs mesurées. Pour calculer
l’incertitude G on généralise la méthode utilisée dans le cas précédent :
dG=G’x+dx+G’y dy+G’z dz+G’u du+G’v dv+G’w dw+…..
G’xi= [ xi
G
] est la dérivée partielle de G par rapport à la variable xi les
autres variables étant supposées constantes.
Exemple :
G= x + 3y - z2- w
4 + 5v -
u
1
1'
x
GxG ; ;
1'
2uu
GuG
3'
y
GyG

7
5'
v
GvG ; ;2' z
z
GzG
34' w
w
GwG
2
23u
duzdzdydxdG + dwwdv 345
on passe ensuite des différentielles dG , dx, dy…….aux incertitudes absolues
.......,, yxG la variation maximale de G associée à x, y,….. c'est-à-dire la
valeur absolue de la différentielle dG de G constitue l’incertitude absolue G
sur G. Cette étape du calcul s’appelle ; Majoration Physique.
Nous avons : ,GdG ,xdx .....ydy
D’où : ......'' yyGxxGG
.Différentes méthodes pour calculer les incertitudes II.2.
.II.2.1 Premier cas
La fonction dont on veut calculer l’incertitude est déterminée à partir des
sommes, de différences, de produits ou de quotidiens.
: Exemple
21z
zu
xxyG
1ére étape :
différentiation de la fonction duGdzGdyGdxGdG uzyx ''''
ydG zxdyu
dxdx 2 du
z
x
z
dzdz
22
2éme étape :
Regroupement des coefficients de dx, dy, dz et du.
22)
12()
1(
u
xdz
zzxdydx
uydG du
3éme étape :
Majoration physique :
G = u
y1
x + x y + 2
12
zz z +
2u
x + u

8
II.2.2. Deuxième cas.
Produits et quotidiens de somme et de différences.
Exemple :
xvy
uxvuyxG
),,,(
1ére étape :
Différentiation de la fonction
On prend cette fois le logarithme de G et on différencie log(G) ce qui permet de
calculer directement l’erreur relative G
G
)log()()log( xvyuxLogG
uvy
xvyd
ux
uxd
G
dGGd
)()()log(
ux
du
ux
dx
G
dG
xvy
dx
xvy
dv
xvy
dy
2éme étape :
on regroupe les coefficients de dx, dy, du et dv.
dxxvyuxG
dG)
11(
dy
xvy)
1(
ux
du
xvy
dv
3éme étape :
Majoration physique :
G
G u
uxxvyv
xvyx
xvyux
11111
III. TRACE DES COURBES
Considérons la relation V=RI et nous voulons calculer la résistance R, V
et I étant des paramètres mesurables.(voir tableau).
Classe de l’ampèremètre=2 et classe du voltmètre=2
I(mA) 3 5 7 9 11 13 15
I (mA) 0.2 0.2 0.2 0.2 0.6 0.6 0.6
V(volts) 5 9 12.6 15.6 19 22.8 26
v(volts) 0.2 0.2 0.6 0.6 0.6 0.6 0.6

9
Chaque résultat expérimental est représenté par un rectangle d’incertitude
dont la longueur des cotés est 2 ; le centre du rectangle étant le point (V,I).
Tracer la courbe sur papier millimètre.
Toutes les droites qui coupent ces rectangles vérifient la relation V=RI.
III.1. Calcul de la pente, incertitude sur la pente et déduction de la
grandeur physique recherche.
Parmi toutes les droites qui coupent les rectangles d’incertitude, on
détermine les pentes P1 et P2 des droites limites.
Soient ),( 11 yxA et )','(' 11 yxA deux points appartenant à la droite de pente
1P et ),( 22 yxB , )','(' 22 yxB deux points appartenant à la droite de pente 2P ,
On aura :
11
111
'
'
xx
yyP
et
22
222
'
'
xx
yyP
La pente moyenne aura pour valeur
2
21 PPPm
Et son incertitude est 2
21 PPPm
Exemple 1 :
Cas de la fonction V=RI. Détermination de la résistance R.(R, étant une
constance).
VP1 =
21
21
'
'
II
VV
;
VP2 =
2'
'
2
22
I
VV
2
21 PPPm
;
2
21 PPP
Or, nous avons :
V=RI R=Pm et PR m

10
Application numérique
AVP /152710).415(
8.76.2431
AVP /194510).415(
2.66.2732
AVPP
Pm /17362
19451527
2
21
AVPP
P /2082
21
)2081736(R
Remarque
Ne pas oublier de concevoir les valeurs du contrat en ampère et les valeurs de la
résistance en Ohm.
Exemple2.
Détermination de la constante K d’un ressort à partir de la courbe
)( 2TfM connaissent la variation de la période T en fonction de la masse
(Confère courbe 2).
MKg 0.050 0.100 0.150 0.200 0.250
)(kgM 0.001 0.001 0.001 0.001 0.001
)(sT 7,8 11,4 13,8 15,8 18,0
)(sT 0,2 0.2 0.2 0.2 0.2
)( 22 ST 61 130 190 249 324
TSTT )(22 3,1 4,5 5,5 6,3 7,2
Nous avons que K
MT 2 . On trace la courbe )( 2TfM . C’est une
droite. On détermine les droites limites de pente 1P et 2P . La pente moyenne mP
est égale à.
2
21 PPPm
et
2
21 PPP

11
avec )('
'2
12
12
111
Td
dM
TT
MMP
; les points ),(
2
11 TM et ),'(2
11 TM sont sur la
droite limite de pente 1P .
2
2
2
2
222
'
'
TT
MMP
=
)( 2Td
dM les points ( 22 ,TM ) et ( 2
22 ,' TM ) sont sur la droite
limite de pente P2.
Or, nous avons :
K
MT 2 et
K
MT 22 4
2
21 PPPm
et
2
21 PPP
soient 2 points I(Ti2
, Mi) et J(Tj2 , Mj) sur la courbe de pente moyenne Pm. les
coordonnées de I et J vérifient la relation :
K
MT 22 2
donc : )(4 2
22
jiji
MMK
TT
ou encore :
)(4
22
2 ji TTK
MjMi
(1)
La relation (1) est une relation linéaire de M en fonction de T2, elle est de
la forme Pxy , la pente P étant égale à 24
K.
Donc la constante K recherchée est reliée à la pente P par :
pmK 24
Et l’incertitude
mPK 24 .
12
Application numérique
233
1 /10.71.040400
10)38296(skgP
233
21 /6110.02
10)51.071.0(
2skg
PPPm
1.0!! ErreurErreurPm 23 /10 skg
mNPmk /408.24 2
mNPmk /0039.04 2
mNk /1)4.08.240( 2
l’unité de k se déduit facilement à partir de l’équation aux dimensions de la
formule : .kxF
Remarque 1 :
Le tracé d’une courbe s’effectue sur papier millimétré, sur celui-ci, il faut
porter les axes de référence en indiquant le nom de la grandeur physique
représentée ainsi que l’échelle choisie.
Il faut que le choix de l’échelle permette l’utilisation de la surface
maximale de la feuille de papier millimétrée.
Remarque 2 :
Ne pas confondre la tangente qui n’a pas d’unités et la pente qui a une
unité.
Remarque 3 :
Il est inutile de porter sur les axes de coordonnées les valeurs associées
aux mesures ou de tracer des droites parallèles aux axes de coordonnées.

13
ERREURS ET INCERTITUDES
I. GENERALITES.
A) Origine des erreurs
On peut classer les erreurs commises sur une mesure ou une série de mesures en
deux grandes catégories :
- les erreurs aléatoires :
Les qui en sont responsables ont des origines variées (frottement faux
contacts, mauvaise mise au point, erreur de lecture du chronomètre…). Elles ne
peuvent, par définition, être évitées ; de plus, leur évaluation est délicate. C’est
ce genre d’erreur qu’il s’agit d’estimer dans la mesure en physique.
- les erreurs systématiques :
Elles résultent soit d’un défaut de l’appareil de mesure, soit de l’utilisation
d’une méthode de mesure mal adaptée. Elles peuvent en général être évitées ou
corrigées.
B) Incertitudes absolues et Incertitudes relatives
Soit Ve la valeur exacte d’une grandeur physique (inconnue) et Vm la
valeur mesurée. On définit l’erreur certaine part :
Valeur de l’erreur certaine= VeVm
Or Ve étant inconnue, il faut définir une estimation probable, appelée incertitude
absolue ( X ) sur la mesure de la grandeur XX , est donnée par :
VmX - Valeur exacte probable.
Les méthodes statistique et probabilistes permettent de calculer la valeur
exacte probable.
Pour comparer les mesures 'X d’une même grandeur dans des intervalles
de valeurs très différentes, on, définit l’incertitude relative par :
14
Incertitude relative=X
X (sans unité)
On l’exprime souvent en pourcentage.
Exemple :
Une mesure de la tension électrique V aux bornes d’une prise de courant
donne V=223 volts.
Ce résultat est connu à 4volts prés. L’incertitude absolue est donc
V= 4volts.
L’incertitude relative est : 018,0233
4
V
V soit 1,8%
II. METHODE STATISTIQUE.
Si l’on dispose d’un grand nombre de mesure de la même grandeur :
1°) On commence par les grouper en classes et on calcule l’effectif in de chaque
classe i , c'est-à-dire le nombre de mesure appartenant à chaque classe.
2°) Ensuite, on trouve un graphique en portant en ordonnée les effectifs de
chaque classe ( in ) et en abscisse la valeur centrale ( iX ) de chaque classe.
Le graphique obtenu s’appelle un histogramme.
Exemple :
Une succession de mesures d’une d. d. p. (30 mesures) aux bornes d’un secteur
électrique a donné le tableau suivant :
N° de la mesure 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Valeur (Volts) 6,1 5,1 4,3 5,2 4,4 5,3 3,2 3,5 4,1 6,2 4,5 6,3 2,1 6,4 6,5
N° de la mesure 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30
Valeur (Volts) 4,2 4,7 5,8 7,1 1,4 5,4 3,1 5,7 4,6 5,6 2,3 5,5 3,8 8,7 7,2
Tableau N°1
Comment former les classes :
a) On cherche la valeur maximale et la valeur minimale :
)29(7,8max mesureVV éme et )20(4,1min mesureVV éme .
15
b) On considère l’intervalle convenable contenant maxV et minX par exemple
[0,10] que l’on divise en 10 intervalles représentant alors la famille de classes.
[0,1], [1,2], [2,3], [3,4], [4,5] [5,6] [6,7] [7,8] [8,9] [9,10].
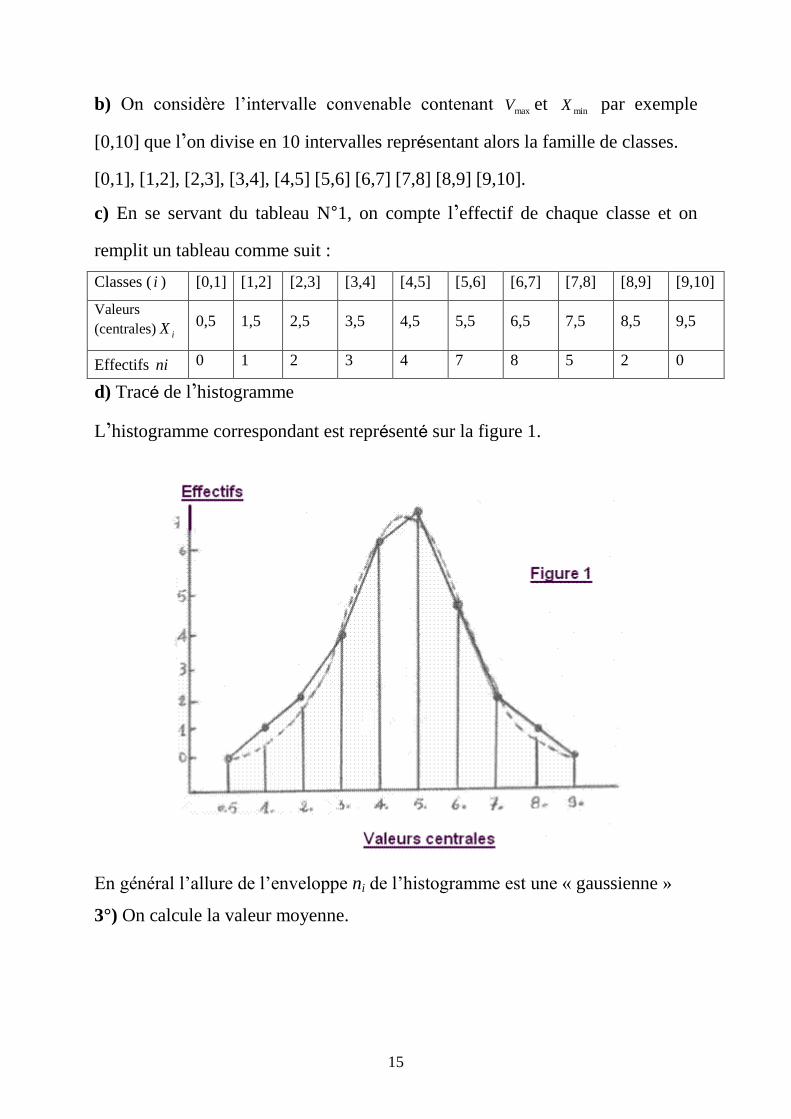
c) En se servant du tableau N°1, on compte l’effectif de chaque classe et on
remplit un tableau comme suit :
Classes ( i ) [0,1] [1,2] [2,3] [3,4] [4,5] [5,6] [6,7] [7,8] [8,9] [9,10]
Valeurs
(centrales) iX 0,5 1,5 2,5 3,5 4,5 5,5 6,5 7,5 8,5 9,5
Effectifs ni 0 1 2 3 4 7 8 5 2 0
d) Tracé de l’histogramme
L’histogramme correspondant est représenté sur la figure 1.
En général l’allure de l’enveloppe ni de l’histogramme est une « gaussienne »
3°) On calcule la valeur moyenne.

16
Soit Xi l’une des valeurs représentant les classes. La moyenne X est donnée
par : X = N
niXiL
i
1
ni : l’effectif de la classe i
Xi : Valeur centrale de la clase i
N =
L
i
ni1
(Total des effectifs)
:L nombre de classes
4°) On calcule l’écart quadratique ou écart type.
N
XXnL
i
ii
1
2)(
Dans notre exemple :
X = VV 1,506,5
V5,2
5°) Récapitulatif.
Si l’enveloppe est une ‘‘gaussienne’’ la théorie des probabilités montre
qu’il y a :
- 68% de chance de trouver une valeur iX dans l’intervalle [ XX , ]
- 95% de chance de trouver une valeur iX dans l’intervalle [ 2,2 XX ]
- 99% de chance de trouver une valeur iX dans l’intervalle [ 3,3 XX ]
Autrement dit on a : XXX au niveau de confiance 68%
22 XXX au niveau de confiance 95%
33 XXX au niveau de confiance 99%
Ceci peut également s’écrire comme suit:
X : avec un niveau de confiance de 68%
2X : avec un niveau de confiance de 95%
3X : avec un niveau de confiance de 99%.

17
III. CAS OU LE NOMBRE DE MESURES EST RESTEINT.
En pratique pour le calcul d’incertitude, on utilise l’une des deux
méthodes suivantes :
A) Mesure directe d’une grandeur X.
On mesure n fois la même grandeur en question, puis on détermine la moyenne
arithmétique :
n
Xi
Xm i
X est alors donnée par le plus grand écart à la moyenne mX :
im XXX sup , ni ...,..........3,2,1
C’est –à- dire la plus différence im XX en valeur absolue.
mX peut être considérée comme la valeur probable de X
X est l’incertitude absolue sur la valeur de .X
Exemple :
Cinq mesures de la période des oscillants d’un pendule simple ont donné
les résultats suivants :
Période )(1 sT )(2 sT )(3 sT )(4 sT )(5 sT
Mesure 1,015 1,012 1,023 1,018 1,017
Calcul de la valeur moyenne mT de la période et de son incertitude :T
5
54321 TTTTTTm
T est déterminée par la plus grande différence en valeur absolue :
im TTT sup

18
D’où
sT
sT
)006,0017,1(
006,0
B) Détermination indirecte d’une grandeur X.
Certaines grandeurs (masse, longueur, temps) peuvent être directement en
les comparant à l’unité. Pour d’autres grandeurs, la mesure se ramène à
l’application d’une formule reliant la grandeur à évaluer à d’autres grandeurs
directement mesurables.
Par exemple la mesure de la surface d’un rectangle de coté a et b se
ramène à l’application de la formule axbS donnant la surface S en fonction
des grandeurs a et b directement mesurables.
1. Méthode de calcul des incertitudes.
Problème posé : Nous voulons calculer l’incertitude sur une grande X
exprimé en fonction grandeurs ,a ,b ,...c directement mesurables. Connaissant
les mesures des grandeurs ,a ,b ,c … et les incertitudes ,a ,b ...,c pour
calculer ,X il faut effectuer les étapes suivantes successivement :
Calculer la différentielle ou la différentielle logarithmique de X selon
l’expression de X
a) Dans le cas d’un produit, par exemple X K ba
ba
22
(exemple 1), on calcule
le logarithme Xlog puis sa dérivée :
Exemple 1 :
ca
dc
ca
da
b
db
a
da
X
dX
ca
cad
b
db
a
da
X
dX
bcaakX
32
)(32
log3)(log2loglog

19
b) Dans le cas d’une somme algébrique cbaX (exemple 2) ou d’une
expression ne faisant pas intervenir des produits 2
1
32 )( baX (exemple
3) on calcule la différentielle de X :
Exemple 2 : dcdbdadX
Exemple 3 :
dbba
bda
ba
adX
dbb
Xda
a
XdX
32
2
32 2
3
Regrouper les termes de même élément différentiel et éventuellement
simplifier.
Dans les exemples 2 et 3 les éléments différentiels sont différents.
Prendre les valeurs absolues des différents termes et remplacer les
différentielles ""d par des "" (incertitude).
Exemple 1 : cca
bb
acaaX
X
1312.
Exemple 2 : cbaX .
Exemple 3 : bba
ba
ba
aX
32
2
32 2
3.
2. Expression du résultat final.
Si une mesure a donné les résultats suivants : 5847,6X et 01,0X (
unité: de X ), l’écriture : )01,05847,6( X est fausse. En effet, puisque
01,0X (2 chiffres après la virgule) nous ne pouvons garder que deux chiffres
après la virgule pour ,X soit 6,58 et on écrit :
)01.058.6( X .
Si 001,0X , alors )001,0585,6( X .
Si 0001,0X , alors )0001,05847,6( X .
20
N.B : Lorsqu’on effectue le calcul d’incertitudes, on doit toujours exprimer le
résultat final sous la forme : (X ± ΔX) unité.
3. Méthode de comparaison entre valeur théorique et valeur expérimentale
d’une même grandeur physique :
En physique lorsqu’il s’agit de faire des mesures expérimentales, nous
avons vu qu’il arrive que l’on puisse mesurer directement ou déterminer
indirectement une grandeur, à partir de la mesure d’autres grandeurs liées à
celle-ci, par une équation obtenue à partir d’une étude théorique. La valeur
mesurée directement notée dX est appelée valeur expérimentale et l’autre notée
1X est appelée valeur théorique.
Les incertitudes relatives aux deux mesures sont dX et iX et sont dues à
l’opérateur et aux instruments de mesure. Afin de comparer dX à Xi et voir s’ils
correspondent à la même grandeur, aux incertitudes prés, nous procéderons de la
manière suivante :
a) Si idid XXXX , alors les deux déterminations donnent valeurs dX et iX
comparables et alors l’expérience confirme l’étude théorique en question.
b) Si id XX > id XX alors l’écart entre dX et iX ne se justifie pas par les
incertitudes de mesure. Ce résultat doit nous étonner et nous pousser à refaire la
mesure, à revoir la méthode d’évaluation des incertitudes ou à revoir l’étude
théorique. Dans tous les cas, en physique c’est l’expérience qui prime par à
rapport à la théorique.
IV. PARTIE PRATIQUE : A faire en salle de travaux-pratiques.
21
PENDULE SIMPLE
I- BUT :
La détermination de l’accélération de la pesanteur g par l’étude d’un
pendule simple.
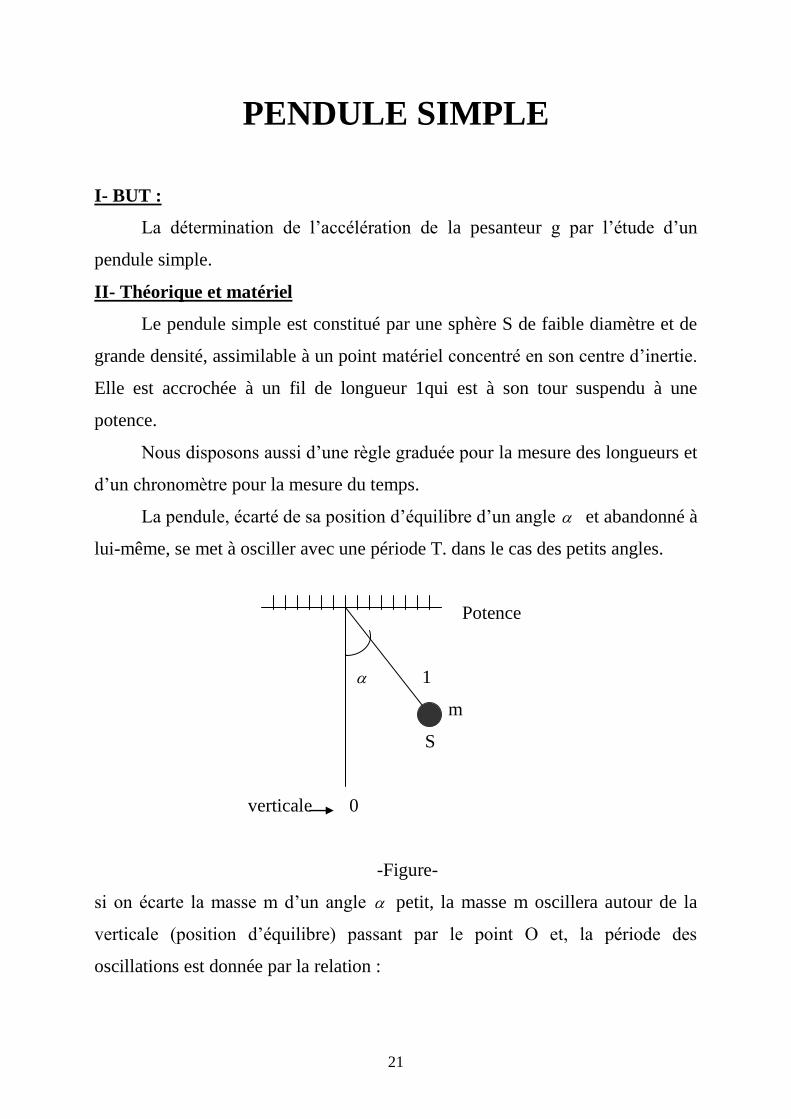
II- Théorique et matériel
Le pendule simple est constitué par une sphère S de faible diamètre et de
grande densité, assimilable à un point matériel concentré en son centre d’inertie.
Elle est accrochée à un fil de longueur 1qui est à son tour suspendu à une
potence.
Nous disposons aussi d’une règle graduée pour la mesure des longueurs et
d’un chronomètre pour la mesure du temps.
La pendule, écarté de sa position d’équilibre d’un angle et abandonné à
lui-même, se met à osciller avec une période T. dans le cas des petits angles.
Potence
1
m
S
verticale 0
-Figure-
si on écarte la masse m d’un angle petit, la masse m oscillera autour de la
verticale (position d’équilibre) passant par le point O et, la période des
oscillations est donnée par la relation :

22
III- Manipulation
a. Indépendance de l’angle
Suspendre l’un des pendules de longueur 30 cm. En restant dans la limite
des petits angles, remplissez le tableau suivant :
Temps (s)
angle
1t 2t 3t mt ( t )s ( t )s t T T
)(1 grand
)(2 petit
1 et 2 faibles ( 15 )
le temps t désigne la durée de 10 oscillations. Il est mesuré 3 fois ; ce qui donne
21 , tt et mtt ,3 étant la moyenne et + ( t )s systématique. Avec,
( t )a =sup ( im tt ) et ( t )s=précision du chronomètre.
La période T et son incertitude t seront données par les formules
10
mtT et 10
tT
gTT
12
(1)
Vérifier que pour les angles importants la période dépend de l’écartement
(prendre 000 6045,30 et )
Conclusion
La différence entre (T grand) et T ( petit) a-t-elle une signification physique
compte tenu des incertitudes ?
Qu’en déduisez vous ?
b. Indépendance de la masse
En suivant la même marche qu’au paravent remplissez le tableau suivant :
(En ayant sont de prendre la même longueur pour les deux pendules)
23
Temps (s)
angle
1t 2t 3t mt ( t )s ( t )s t T T
1
2
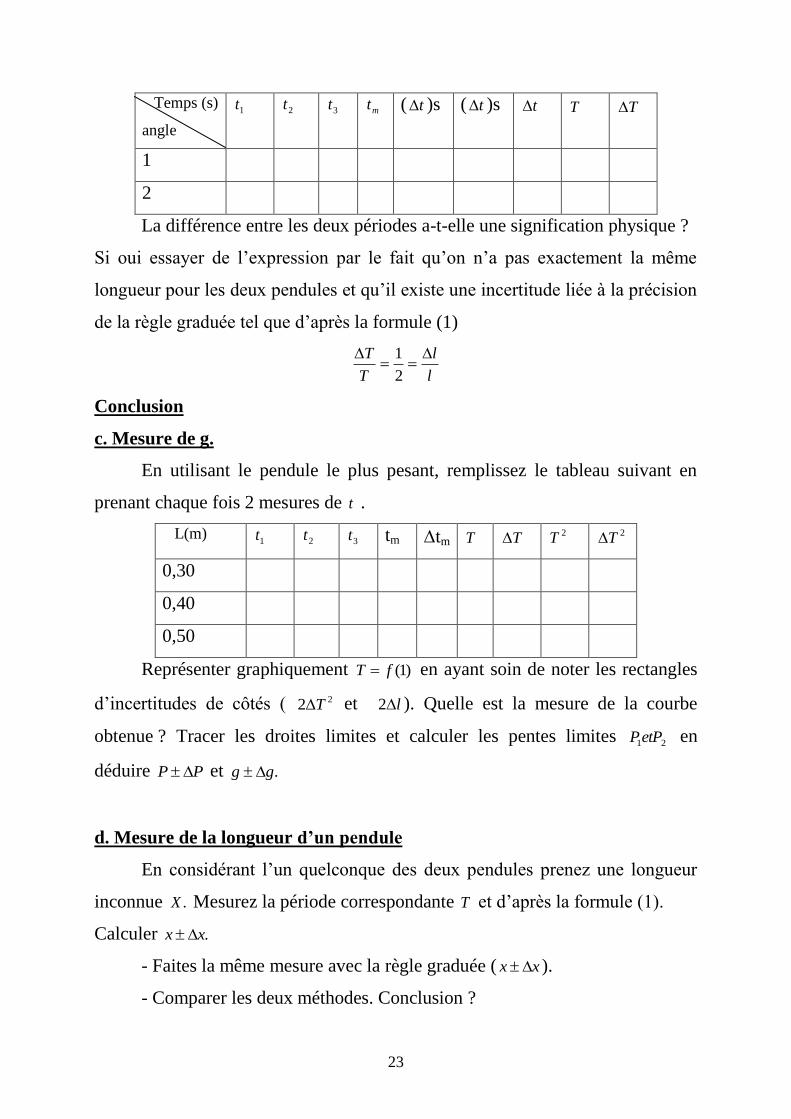
La différence entre les deux périodes a-t-elle une signification physique ?
Si oui essayer de l’expression par le fait qu’on n’a pas exactement la même
longueur pour les deux pendules et qu’il existe une incertitude liée à la précision
de la règle graduée tel que d’après la formule (1)
l
l
T
T
2
1
Conclusion
c. Mesure de g.
En utilisant le pendule le plus pesant, remplissez le tableau suivant en
prenant chaque fois 2 mesures de t .
L(m) 1t 2t 3t tm tm T T 2T 2T
0,30
0,40
0,50
Représenter graphiquement )1(fT en ayant soin de noter les rectangles
d’incertitudes de côtés ( 22 T et l2 ). Quelle est la mesure de la courbe
obtenue ? Tracer les droites limites et calculer les pentes limites 21etPP en
déduire PP et .gg
d. Mesure de la longueur d’un pendule
En considérant l’un quelconque des deux pendules prenez une longueur
inconnue .X Mesurez la période correspondante T et d’après la formule (1).
Calculer .xx
- Faites la même mesure avec la règle graduée ( xx ).
- Comparer les deux méthodes. Conclusion ?

24
ETUDE DU MOUVEMENT DE ROTATION
I. But de la manipulation.
Le but de la manipulation est l’étude d’un mouvement de rotation d’un
corps solide autour d’un axe fixe. Le solide utilisé présente un axe de symétrie
confondu avec l’axe de rotation.
La force appliquée sera constante en module et direction, elle donnera au
solide un mouvement uniformément accéléré. En faisant varier certain
paramètre, on vérifiera la nature du mouvement et on calculera le moment
d’inertie du système par rapport à son axe de rotation.
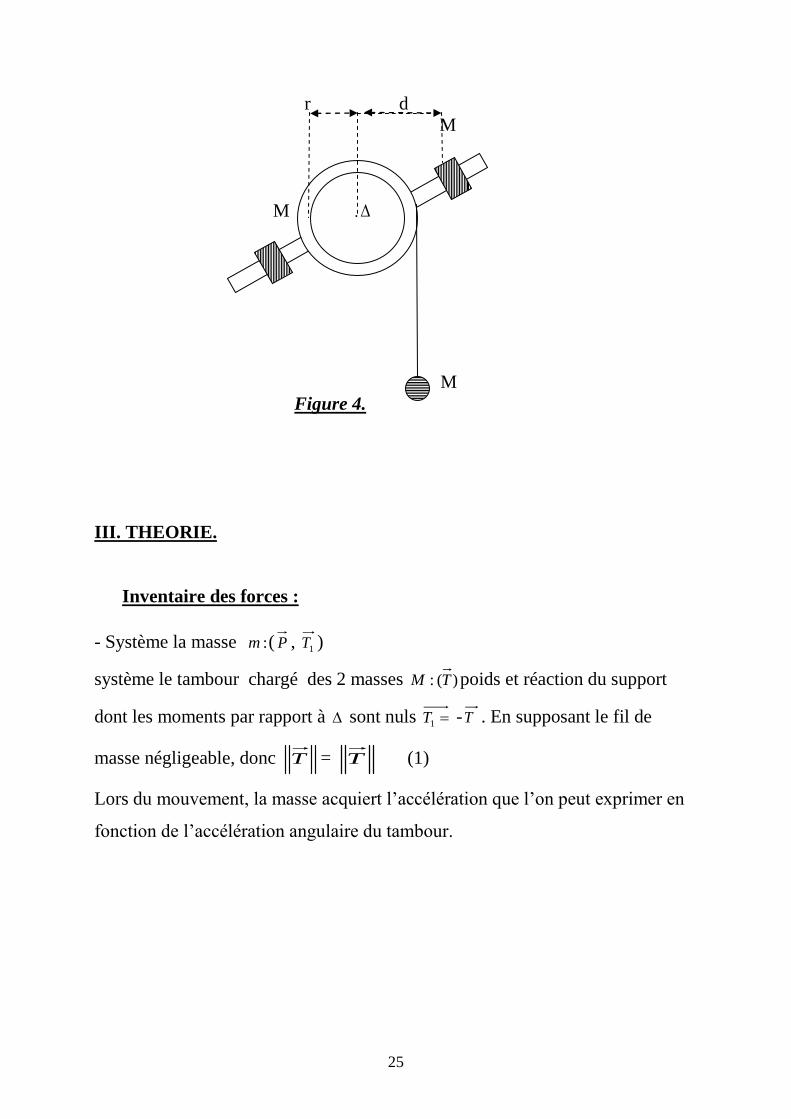
II. Description.
Le montage comprend ( voir figure 4) :
- Un tambour monté sur roulement à billes, sur lequel est entouré un fil
souple. Le tambour tourne de l’axe, horizontal.
- Une tige solidaire du tambour, graduée de 2 cm en 2cm à partir de l’axe
- Deux masses cylindres M pouvant coulisser sur cette tige. Il existe trois
jeux de masses, soient M la masse la plus grosse, M’ celle de taille moyenne
et M* celle de petit taille.
- Un chronomètre.
- Une masse à accrocher au bout du fil.
25
r d
M
M
M
Figure 4.
III. THEORIE.
Inventaire des forces :
- Système la masse :m ( P , 1T )
système le tambour chargé des 2 masses )(: TM poids et réaction du support
dont les moments par rapport à sont nuls 1T -T . En supposant le fil de
masse négligeable, donc T = T (1)
Lors du mouvement, la masse acquiert l’accélération que l’on peut exprimer en
fonction de l’accélération angulaire du tambour.
.

26
est la tension du fil
+
M
M . r X’
axe de rotation
1T 1T
Figure 5 m
P X
r (2) ; 2
2
dt
d
L’équation fondamentale de la dynamique appliquée à la masse m en
mouvement donne, en projetant sur xx ' : mTP 1 :
mTmg 1
)()(1 rgmgmTT (3).
Le théorème du moment d’inertie appliqué au tambour donne :
.. IrT (4).
En utilisant (3) et (4) on obtient :
ImgrmgrrT )(. 2 .
D’où l’équation du mouvement du système :
)( 2mrI = )(mgr (5).
On pose : J= (I+mr2) et Mo= mgr.
r = rayon du cylindre
27
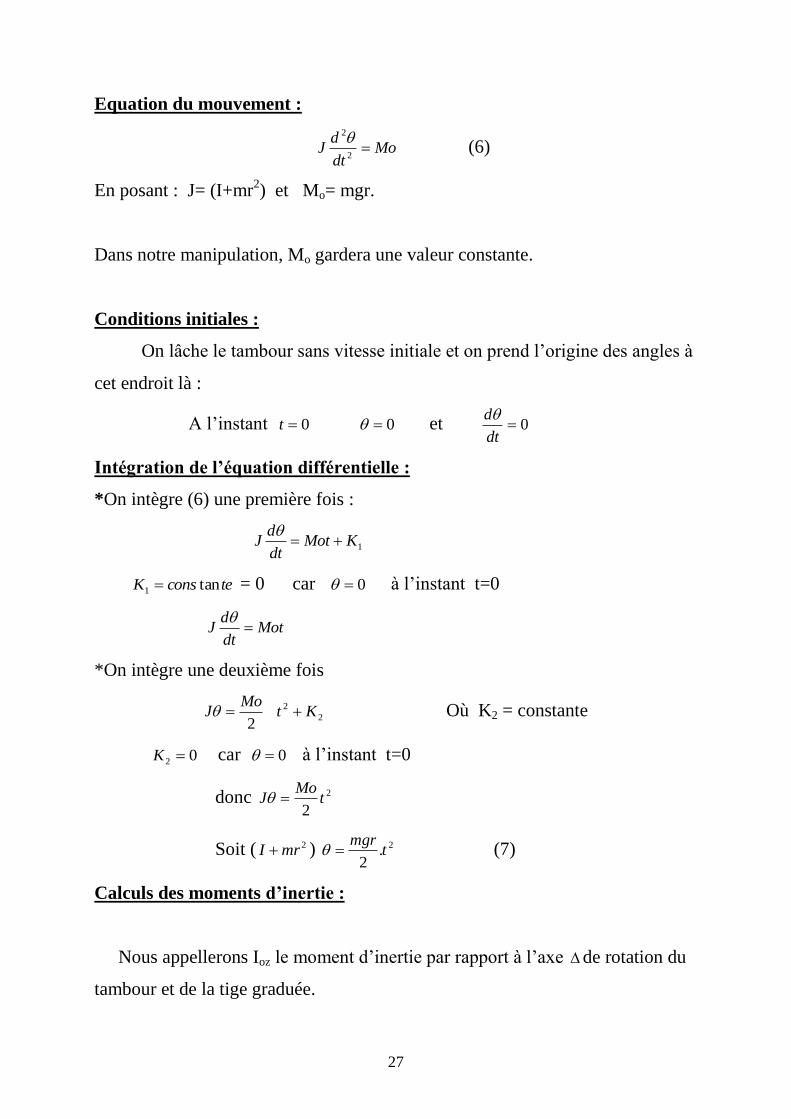
Equation du mouvement :
Modt
dJ
2
2 (6)
En posant : J= (I+mr2) et Mo= mgr.
Dans notre manipulation, Mo gardera une valeur constante.
Conditions initiales :
On lâche le tambour sans vitesse initiale et on prend l’origine des angles à
cet endroit là :
A l’instant 0t 0 et 0dt
d
Intégration de l’équation différentielle :
*On intègre (6) une première fois :
1KMotdt
dJ
teconsK tan1 = 0 car 0 à l’instant t=0
Motdt
dJ
*On intègre une deuxième fois
2
MoJ 2
2 Kt Où K2 = constante
02 K car 0 à l’instant t=0
donc 2
2t
MoJ
Soit ( 2mrI ) 2.2
tmgr
(7)
Calculs des moments d’inertie :
Nous appellerons Ioz le moment d’inertie par rapport à l’axe de rotation du
tambour et de la tige graduée.
28
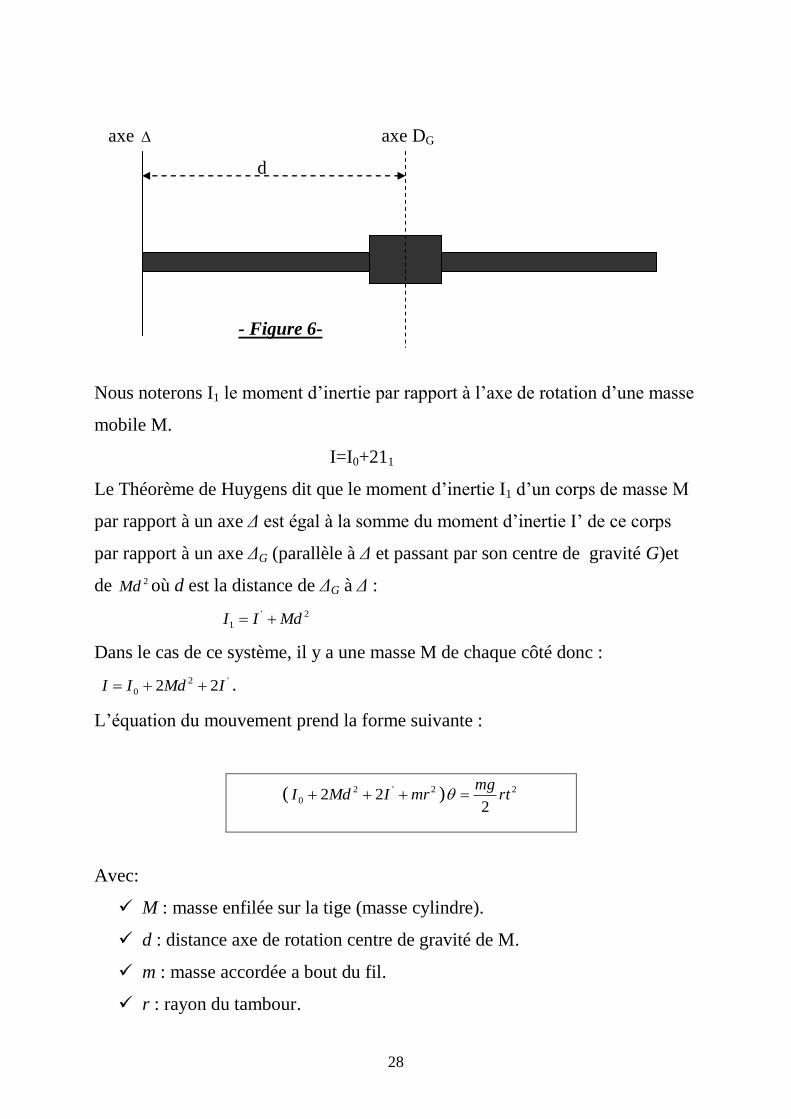
axe axe DG
d
- Figure 6-
Nous noterons I1 le moment d’inertie par rapport à l’axe de rotation d’une masse
mobile M.
I=I0+211
Le Théorème de Huygens dit que le moment d’inertie I1 d’un corps de masse M
par rapport à un axe Δ est égal à la somme du moment d’inertie I’ de ce corps
par rapport à un axe ΔG (parallèle à Δ et passant par son centre de gravité G)et
de 2Md où d est la distance de ΔG à Δ :
2'
1 MdII
Dans le cas de ce système, il y a une masse M de chaque côté donc :
'2
0 22 IMdII .
L’équation du mouvement prend la forme suivante :
( 2'2
0 22 mrIMdI ) 2
2rt
mg
Avec:
M : masse enfilée sur la tige (masse cylindre).
d : distance axe de rotation centre de gravité de M.
m : masse accordée a bout du fil.
r : rayon du tambour.
29
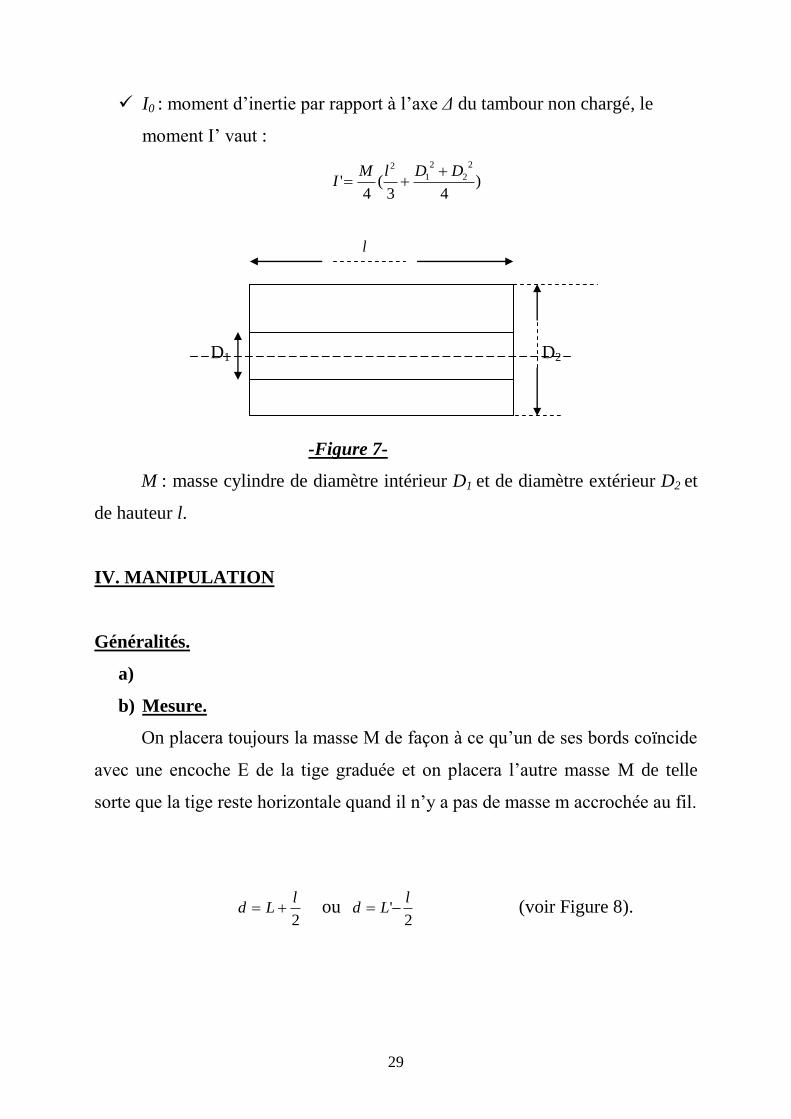
I0 : moment d’inertie par rapport à l’axe Δ du tambour non chargé, le
moment I’ vaut :
)43
(4
'
2
2
2
1
2 DDlMI
l
D1 D2
-Figure 7-
M : masse cylindre de diamètre intérieur D1 et de diamètre extérieur D2 et
de hauteur l.
IV. MANIPULATION
Généralités.
a)
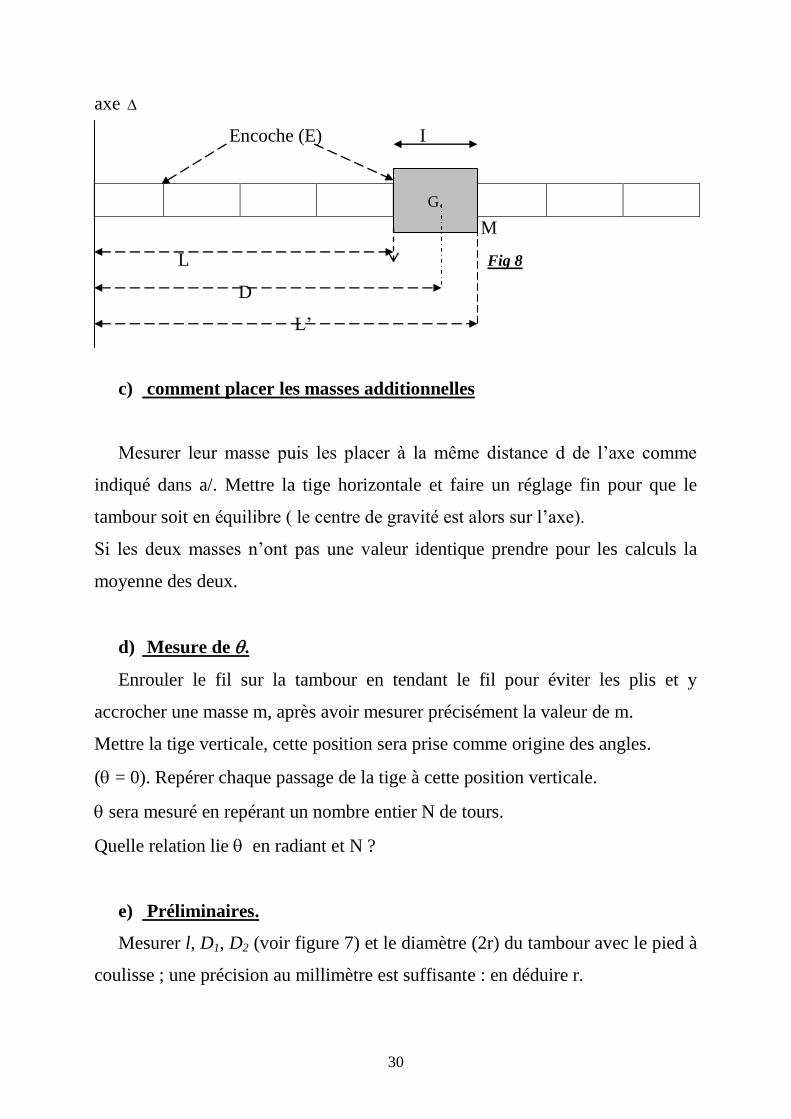
b) Mesure.
On placera toujours la masse M de façon à ce qu’un de ses bords coïncide
avec une encoche E de la tige graduée et on placera l’autre masse M de telle
sorte que la tige reste horizontale quand il n’y a pas de masse m accrochée au fil.
2
lLd ou
2'
lLd (voir Figure 8).
30
axe
Encoche (E) I
M
L Fig 8
D
L’
c) comment placer les masses additionnelles
Mesurer leur masse puis les placer à la même distance d de l’axe comme
indiqué dans a/. Mettre la tige horizontale et faire un réglage fin pour que le
tambour soit en équilibre ( le centre de gravité est alors sur l’axe).
Si les deux masses n’ont pas une valeur identique prendre pour les calculs la
moyenne des deux.
d) Mesure de .
Enrouler le fil sur la tambour en tendant le fil pour éviter les plis et y
accrocher une masse m, après avoir mesurer précisément la valeur de m.
Mettre la tige verticale, cette position sera prise comme origine des angles.
( = 0). Repérer chaque passage de la tige à cette position verticale.
sera mesuré en repérant un nombre entier N de tours.
Quelle relation lie en radiant et N ?
e) Préliminaires.
Mesurer l, D1, D2 (voir figure 7) et le diamètre (2r) du tambour avec le pied à
coulisse ; une précision au millimètre est suffisante : en déduire r.
G.
31
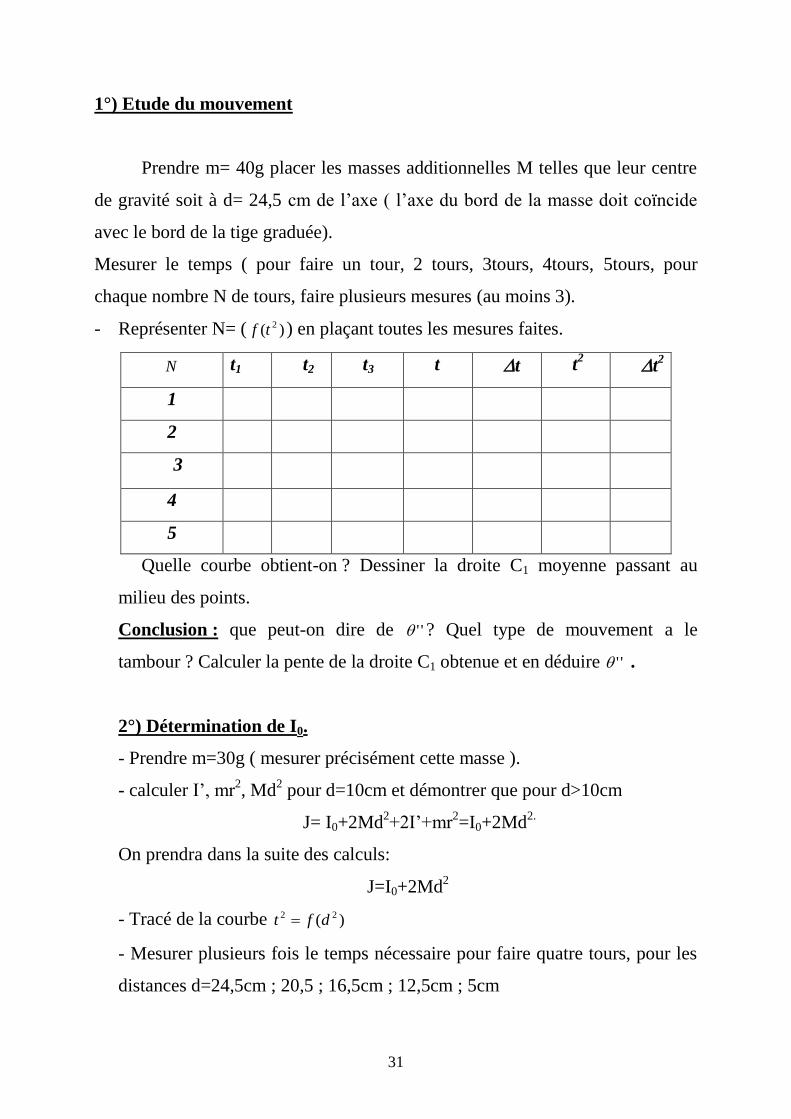
1°) Etude du mouvement
Prendre m= 40g placer les masses additionnelles M telles que leur centre
de gravité soit à d= 24,5 cm de l’axe ( l’axe du bord de la masse doit coïncide
avec le bord de la tige graduée).
Mesurer le temps ( pour faire un tour, 2 tours, 3tours, 4tours, 5tours, pour
chaque nombre N de tours, faire plusieurs mesures (au moins 3).
- Représenter N= ( )( 2tf ) en plaçant toutes les mesures faites.
N t1 t2 t3 t t t2 t
2
1
2
3
4
5
Quelle courbe obtient-on ? Dessiner la droite C1 moyenne passant au
milieu des points.
Conclusion : que peut-on dire de '' ? Quel type de mouvement a le
tambour ? Calculer la pente de la droite C1 obtenue et en déduire '' .
2°) Détermination de I0.
- Prendre m=30g ( mesurer précisément cette masse ).
- calculer I’, mr2, Md
2 pour d=10cm et démontrer que pour d>10cm
J= I0+2Md2+2I’+mr
2=I0+2Md
2.
On prendra dans la suite des calculs:
J=I0+2Md2
- Tracé de la courbe )( 22 dft
- Mesurer plusieurs fois le temps nécessaire pour faire quatre tours, pour les
distances d=24,5cm ; 20,5 ; 16,5cm ; 12,5cm ; 5cm
32
- Représenter graphiquement )( 22 dft en plaçant touts les mesures
d(cm) d2
t1 t2 t3 t t t2 t
2
24,5
20,5
16,5
12,5
5
A noter que :
- N = 4 tours (nombre de tours)
d = 0.2 cm
- Quelle courbe obtient-on ?
L’équation (8) est de la forme .22 badt calculer littéralement a et b
d’après cette équation.
- Tracer une droite C2 passant au milieu des points. Mesurer b sur le graphe
et en déduire I0.
- Vérifier que l’approximation 2
0 2MdIJ était valable ( '20 II et 2mr )
Conclusion :
Que pensez-vous de cette méthode de mesure d’un moment d’inertie ?
Quelle sont les principes causes d’incertitude ?
Facultatif :
Refaire la même expérience avec les masses M’. soit C’2 la droite
obtenue.
Recalculer I0 par la même méthode et comparer avec le résultat précédent.
Calculer les pentes des droites 2C et '
2C (soit a et 'a ). Calculer '/ aa et
comparer à './ MM conclusion.