SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR I · Pour ce type d’engin, ... (mise en rotation ......
18
SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR I Concours Centrale-Supélec 2004 1/18 SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR I Filière TSI COMPACTEUR Le compacteur étudié (Caterpillar, modèle ) est présenté sur les figures 1a et 1b avec ses caractéris- tiques externes principales. Ce compacteur vibrant est destiné aux petits travaux de compactage. Pour ce type d’engin, le compac- tage résulte plus des chocs à fré- quence élevée qu’exerce chaque cylindre sur le sol plutôt que de la masse du compacteur. Le schéma cinématique du compacteur est donné sur la figure 2. Le cylindre (avant ou arrière) est porté par deux supports de cylin- dre (gauche et droit) par l’intermé- diaire de plots élastiques qui permettent de petits déplacements radiaux associés aux vibrations de ce cylindre. Chaque support de cylindre est en liaison pivot d’axe horizontal avec un demi-bâti (avant ou arrière). Les vibrations sont obtenues par le mouvement de rotation à vitesse rapide d’un arbre nommé arbre-balourd constitué d’un arbre équilibré sur lequel est placée une masse excentrée (masse « balourd »). La mise en rotation de l’arbre-balourd est effectuée par le moteur hydraulique de vibration par l’intermédiaire d’une transmission à double joint de Cardan. Un solide intermédiaire, cloche de vibra- tion, en liaison encastrement avec le cylindre, assure le guidage en rotation de l’arbre-balourd. La masse « balourd » se trouve dans le plan médian vertical du cylindre (avant ou arrière). L’avancement du compacteur est obtenu par la mise en rotation d’un des deux supports de cylindre (support gauche pour l’avant et support droit pour l’arrière) par le moteur hydraulique d’avancement. Construction du sujet : • la partie I : est consacrée à l’avancement de ce compacteur (mise en rotation des cylindres par l’intermédiaire de deux moteurs hydrauliques) ; 214 D 3600 tr min 1 – ⋅ ( )
Transcript of SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR I · Pour ce type d’engin, ... (mise en rotation ......

SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR I
Concours Centrale-Supélec 2004 1/18
SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR I Filière TSI
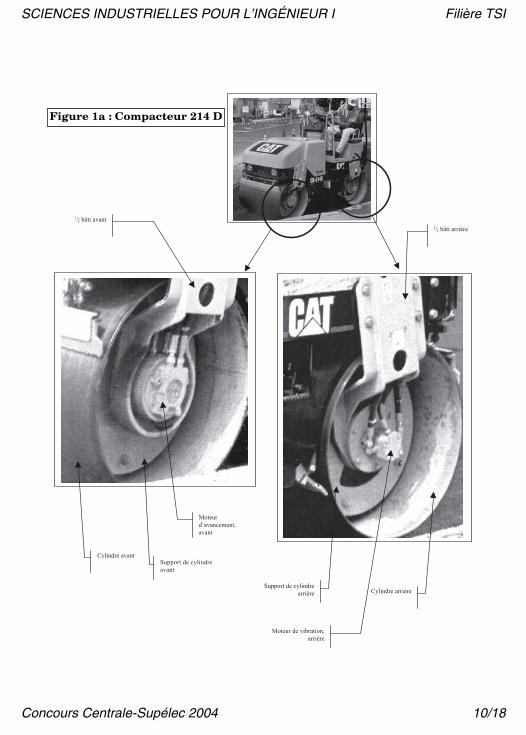
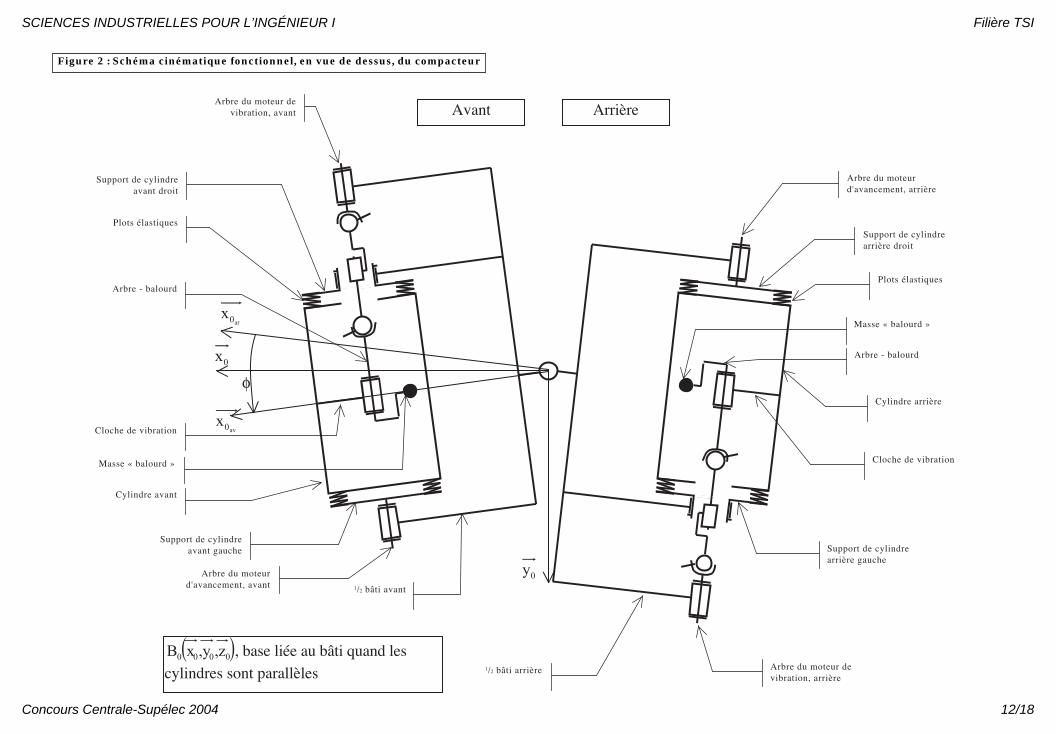
COMPACTEURLe compacteur étudié (Caterpillar,modèle ) est présenté sur lesfigures 1a et 1b avec ses caractéris-tiques externes principales. Cecompacteur vibrant est destinéaux petits travaux de compactage.Pour ce type d’engin, le compac-tage résulte plus des chocs à fré-quence élevée qu’exerce chaquecylindre sur le sol plutôt que de lamasse du compacteur. Le schémacinématique du compacteur estdonné sur la figure 2.Le cylindre (avant ou arrière) estporté par deux supports de cylin-dre (gauche et droit) par l’intermé-
diaire de plots élastiques qui permettent de petits déplacements radiauxassociés aux vibrations de ce cylindre. Chaque support de cylindre est en liaisonpivot d’axe horizontal avec un demi-bâti (avant ou arrière). Les vibrations sontobtenues par le mouvement de rotation à vitesse rapide d’unarbre nommé arbre-balourd constitué d’un arbre équilibré sur lequel est placéeune masse excentrée (masse « balourd »). La mise en rotation de l’arbre-balourdest effectuée par le moteur hydraulique de vibration par l’intermédiaire d’unetransmission à double joint de Cardan. Un solide intermédiaire, cloche de vibra-tion, en liaison encastrement avec le cylindre, assure le guidage en rotation del’arbre-balourd. La masse « balourd » se trouve dans le plan médian vertical ducylindre (avant ou arrière).L’avancement du compacteur est obtenu par la mise en rotation d’un des deuxsupports de cylindre (support gauche pour l’avant et support droit pour l’arrière)par le moteur hydraulique d’avancement.Construction du sujet :• la partie I : est consacrée à l’avancement de ce compacteur (mise en rotation
des cylindres par l’intermédiaire de deux moteurs hydrauliques) ;
214D
3600 tr min1–
⋅( )
Concours Centrale-Supélec 2004 2/18
Filière TSI
SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR I Filière TSI
• la partie II : traite du problème d’orientation des deux demi-bâtis (et doncdes cylindres) lorsque le compacteur se déplace en courbe ;
• la partie III : est dédiée à l’étude de la solution technologique permettant lavibration de chaque cylindre ;
• la partie IV : étudie le guidage en rotation de l’arbre recevant le balourd ;• la partie V : propose l’étude d’une autre solution constructive permettant
d’obtenir une direction de vibration fixe.
I - Étude des solutions technologiques associées à la fonction « faire tourner les cylindres »
Chaque chaîne fonctionnelle d’avancement utilise un moteur hydraulique lentdont les caractéristiques principales sont :• moteur à pistons radiaux Poclain Hydraulics : ,• cylindrée (volume théorique aspiré (engendré par les pistons) par tour
d’arbre) : ,• vitesse maxi : ,• puissance sur l’arbre de sortie : .Pour les questions I.A à I.F, les conditions d’utilisation du compacteur sont :• vitesse, au centre de gravité , du compacteur , par rapport au sol :
; = constante = ,• pente de la chaussée à compacter : ,• accélération de la pesanteur , • moteurs de vibration à l’arrêt,• roulement sans glissement des cylindres sur le sol.Hypothèses :• pour cette faible pente, on supposera que les deux cylindres sont chargés de
manière identique,
MK 04 2– 11–
Cy 408 cm3
=
NMaxi 100 tr min1–
⋅=
P 18 kW=
G0 0 sV G0 0 s⁄,( ) V0 x0⋅= V0 4 km h
1–⋅
7 %
g 9 81 m s2–
⋅,=
SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR I Filière TSI
Concours Centrale-Supélec 2004 3/18
• la résistance à l’avancement lors du compactage est modélisée par un glis-seur, de résultante , exercé par le sol sur chaque cylindre au milieudu contact sol-cylindre et tel que : , avec ,
• .
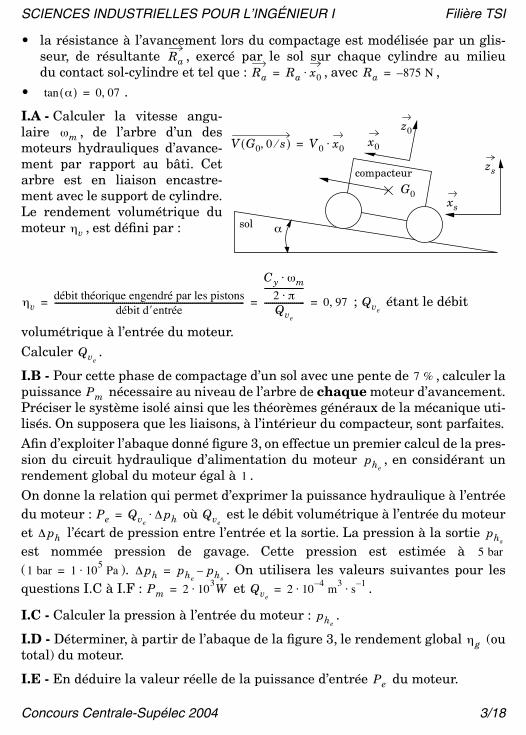
I.A - Calculer la vitesse angu-laire , de l’arbre d’un desmoteurs hydrauliques d’avance-ment par rapport au bâti. Cetarbre est en liaison encastre-ment avec le support de cylindre.Le rendement volumétrique dumoteur , est défini par :
; étant le débit
volumétrique à l’entrée du moteur.Calculer .
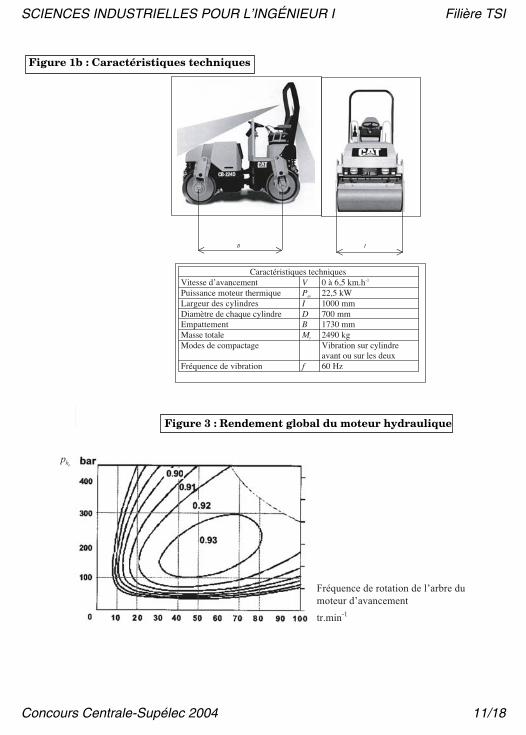
I.B - Pour cette phase de compactage d’un sol avec une pente de , calculer lapuissance nécessaire au niveau de l’arbre de chaque moteur d’avancement.Préciser le système isolé ainsi que les théorèmes généraux de la mécanique uti-lisés. On supposera que les liaisons, à l’intérieur du compacteur, sont parfaites.Afin d’exploiter l’abaque donné figure 3, on effectue un premier calcul de la pres-sion du circuit hydraulique d’alimentation du moteur , en considérant unrendement global du moteur égal à .On donne la relation qui permet d’exprimer la puissance hydraulique à l’entréedu moteur : où est le débit volumétrique à l’entrée du moteuret l’écart de pression entre l’entrée et la sortie. La pression à la sortie est nommée pression de gavage. Cette pression est estimée à ( ). . On utilisera les valeurs suivantes pour lesquestions I.C à I.F : et .
I.C - Calculer la pression à l’entrée du moteur : .
I.D - Déterminer, à partir de l’abaque de la figure 3, le rendement global (outotal) du moteur.
I.E - En déduire la valeur réelle de la puissance d’entrée du moteur.
RaRa Ra x0⋅= Ra 875 N–=
α( )tan 0 07,=
xs
zs
z0x0
G0
compacteur
αsol
V G0 0 s⁄,( ) V0 x0⋅=ωm
ηv
ηvdébit théorique engendré par les pistons
débit d′entrée-----------------------------------------------------------------------------------------------
Cy ωm⋅
2 π⋅--------------------
Qve
-------------------- 0 97,= = = Qve
Qve
7 %Pm
phe1
Pe Qve∆ph⋅= Qve
∆ph phs
5 bar
1 bar 1 105 Pa⋅= ∆ph phe
phs–=
Pm 2 103W⋅= Qve
2 104– m
3s
1–⋅⋅=
phe
ηg
Pe
SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR I Filière TSI
Concours Centrale-Supélec 2004 4/18
I.F - En adoptant un rendement global pour la pompe hydrauliquequi alimente les deux moteurs d’avancement, déterminer la puissance mécani-que nécessaire à l’entrée de cette pompe. Comparer cette valeur à celle fourniepar le moteur thermique (figure 1b).
II - Étude des solutions technologiques associées à la fonction « orienter les cylindres »
La figure 4 représente l’implantation du vérin hydraulique permettant l’orien-tation du demi-bâti avant par rapport au demi-bâti arrière. On note (voir aussi figure 2), l’angle d’orientation entre le demi-
bâti avant et le demi-bâti arrière (donc entre l’axe du cylindre avant et l’axe du
cylindre arrière).
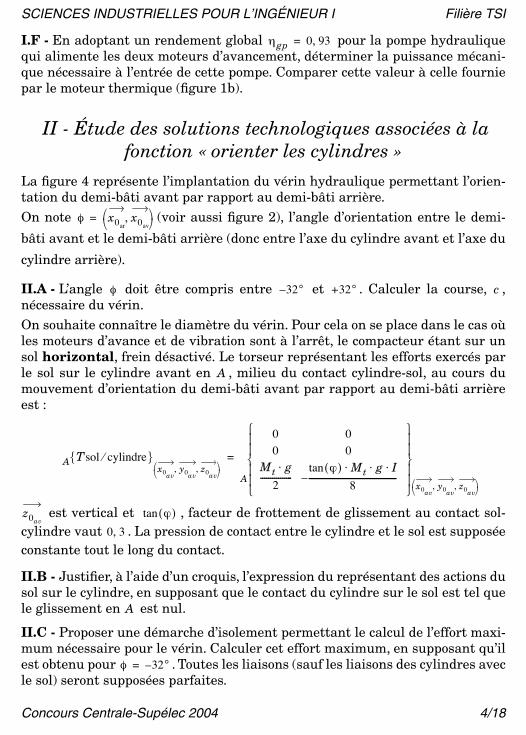
II.A - L’angle doit être compris entre et . Calculer la course, ,nécessaire du vérin.On souhaite connaître le diamètre du vérin. Pour cela on se place dans le cas oùles moteurs d’avance et de vibration sont à l’arrêt, le compacteur étant sur unsol horizontal, frein désactivé. Le torseur représentant les efforts exercés parle sol sur le cylindre avant en , milieu du contact cylindre-sol, au cours dumouvement d’orientation du demi-bâti avant par rapport au demi-bâti arrièreest :
est vertical et , facteur de frottement de glissement au contact sol-cylindre vaut . La pression de contact entre le cylindre et le sol est supposéeconstante tout le long du contact.
II.B - Justifier, à l’aide d’un croquis, l’expression du représentant des actions dusol sur le cylindre, en supposant que le contact du cylindre sur le sol est tel quele glissement en est nul.
II.C - Proposer une démarche d’isolement permettant le calcul de l’effort maxi-mum nécessaire pour le vérin. Calculer cet effort maximum, en supposant qu’ilest obtenu pour . Toutes les liaisons (sauf les liaisons des cylindres avecle sol) seront supposées parfaites.
ηgp 0 93,=
φ x0arx0av
,⎝ ⎠⎛ ⎞=
φ 32°– +32° c
A
Tsol cylindre⁄ Ax0av
y0avz0av
, ,⎝ ⎠⎛ ⎞
0 0
0 0
Mt g⋅2
----------------ϕ( )tan Mt g I⋅ ⋅ ⋅
8--------------------------------------------–
⎩ ⎭⎪ ⎪⎪ ⎪⎨ ⎬⎪ ⎪⎪ ⎪⎧ ⎫
Ax0av
y0avz0av
, ,⎝ ⎠⎛ ⎞
=
z0avϕ( )tan
0 3,
A
φ 32°–=
SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR I Filière TSI
Concours Centrale-Supélec 2004 5/18
II.D - Vérifier le choix correct de ce vérin, la pression d’alimentation étant de et le vérin hydraulique choisi ayant un diamètre de piston
avec un diamètre de tige .
III - Réalisation de la fonction « imposer le balourd »
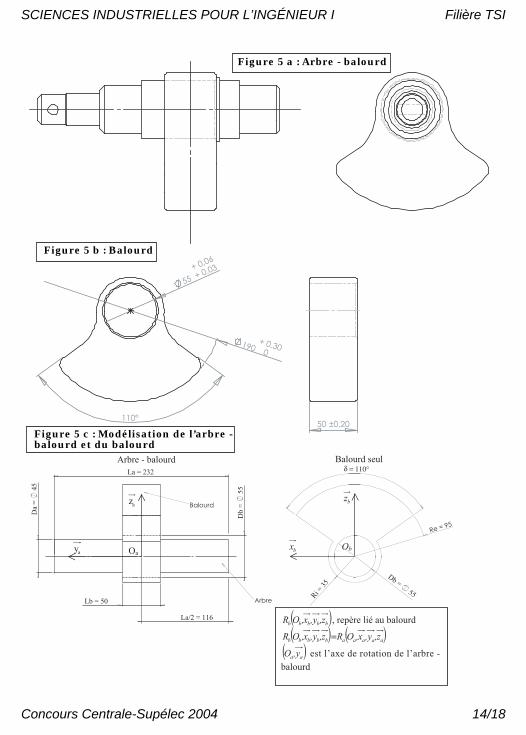
Les dessins de définition de l’ensemble de l’arbre , équipé du balourd , cetensemble étant nommé arbre-balourd, ainsi que celui du balourd sont donnéssur les figures 5a et 5b. Une modélisation (à utiliser pour les questions III.A àIII.C) de l’arbre-balourd et du balourd est donnée figure 5c. Ces deux pièces sonten acier (masse volumique ). L’arbre recevant le balourd estmodélisé par un cylindre épaulé de diamètre et de longueur
(son diamètre vaut sous le balourd). On note , le cen-tre d’inertie de cet arbre.
III.A - Déterminer la masse du balourd, masse notée .
III.B - Calculer la position du centre d’inertie de ce balourd .
III.C - En utilisant les données de la figure 5c, proposer et justifier l’allure géné-rale de la matrice d’inertie de l’ensemble arbre-balourd, en et dans
. Calculer le moment d’inertie de cet ensemble autour de.
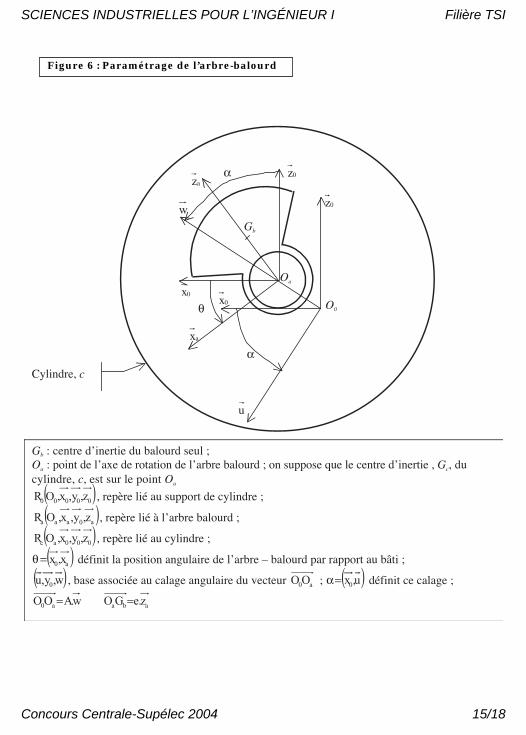
On se place maintenant dans une phase d’essais du compacteur permettant demesurer quelques performances. Pour cette phase d’essais, le bâti du compac-teur est posé sur des cales, cylindres parallèles. Les moteurs d’avancement sontà l’arrêt. Ainsi, chaque support de cylindre est fixe par rapport au sol. Les cylin-dres ne touchent plus le sol et ne tournent pas. Seul le moteur de vibration fonc-tionne. Les cylindres vibrent et entraînent un désaxage de l’ensemble cylindre ;arbre-balourd par rapport à . Ce désaxage faible dépend de la raideurdes plots élastiques ( , figure 6).Hypothèses :• le centre d’inertie du cylindre est supposé confondu avec le point
(figure 6 : paramétrage de l’arbre-balourd). Ce point est sur l’axe du cylin-dre, à la verticale du point (figure 4),
• les actions qu’exerce l’ensemble des deux supports (droite et gauche) sur lecylindre par l’intermédiaire des plots élastiques sont modélisées en parun glisseur de résultante avec :
• : accélération de la pesanteur ,• masse de l’ensemble cylindre + arbre-balourd,
,
40 bar Dp 63 mm=Dt 28 mm=
a b
ρ 7 8 103kg m
3–⋅⋅,=
Da 45 mm=La 232 mm= Db 55 mm Oa
mb
Gb
OaBa xa ya za, ,( ) Ba b+Oa ya,( )
O0 y0,( )A 1 mm<
Gc OaGc
A
OaRsupports cylindre⁄ mc a b+ + g z0⋅ ⋅=
g g 9 81 m s2–
⋅,=mc a b+ +mc a b+ + 400 kg=
SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR I Filière TSI
Concours Centrale-Supélec 2004 6/18
• le poids de l’arbre ainsi que celui du balourd sont négligés par rapport aupoids du cylindre,
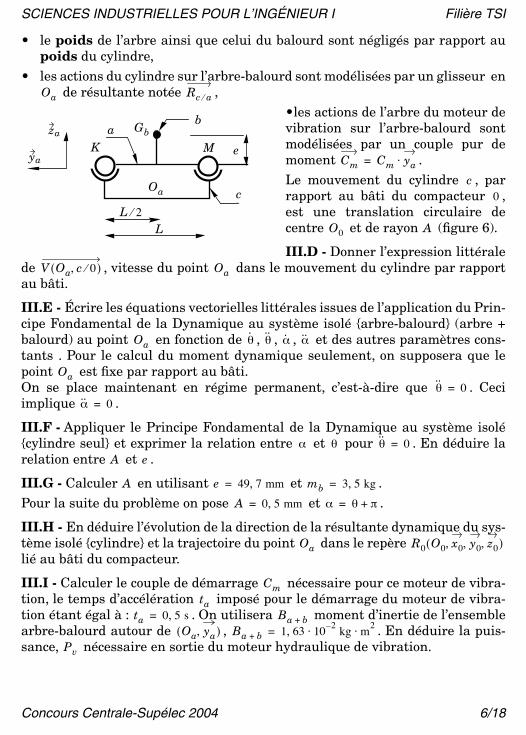
• les actions du cylindre sur l’arbre-balourd sont modélisées par un glisseur en de résultante notée ,
•les actions de l’arbre du moteur devibration sur l’arbre-balourd sontmodélisées par un couple pur demoment .Le mouvement du cylindre , parrapport au bâti du compacteur ,est une translation circulaire decentre et de rayon (figure 6).
III.D - Donner l’expression littéralede , vitesse du point dans le mouvement du cylindre par rapportau bâti.
III.E - Écrire les équations vectorielles littérales issues de l’application du Prin-cipe Fondamental de la Dynamique au système isolé arbre-balourd (arbre +balourd) au point en fonction de , , , et des autres paramètres cons-tants . Pour le calcul du moment dynamique seulement, on supposera que lepoint est fixe par rapport au bâti.On se place maintenant en régime permanent, c’est-à-dire que . Ceciimplique .
III.F - Appliquer le Principe Fondamental de la Dynamique au système isolécylindre seul et exprimer la relation entre et pour . En déduire larelation entre et .
III.G - Calculer en utilisant et .Pour la suite du problème on pose et .
III.H - En déduire l’évolution de la direction de la résultante dynamique du sys-tème isolé cylindre et la trajectoire du point dans le repère lié au bâti du compacteur.
III.I - Calculer le couple de démarrage nécessaire pour ce moteur de vibra-tion, le temps d’accélération imposé pour le démarrage du moteur de vibra-tion étant égal à : . On utilisera moment d’inertie de l’ensemblearbre-balourd autour de , . En déduire la puis-sance, nécessaire en sortie du moteur hydraulique de vibration.
Oa Rc a⁄
za
ya
cL 2⁄
L
Gbb
a
Oa
M eKCm Cm ya⋅=
c0
O0 A
V Oa c 0⁄,( ) Oa
Oa θ θ α α
Oaθ 0=
α 0=
α θ θ 0=A e
A e 49 7 mm,= mb 3 5 kg,=
A 0 5 mm,= α θ π+=
Oa R0 O0 x0 y0 z0, , ,( )
Cmta
ta 0 5 s,= Ba b+Oa ya,( ) Ba b+ 1 63 10
2– kg m
2⋅⋅,=
Pv
SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR I Filière TSI
Concours Centrale-Supélec 2004 7/18
IV - Réalisation de la fonction « guider l’arbre-balourd »
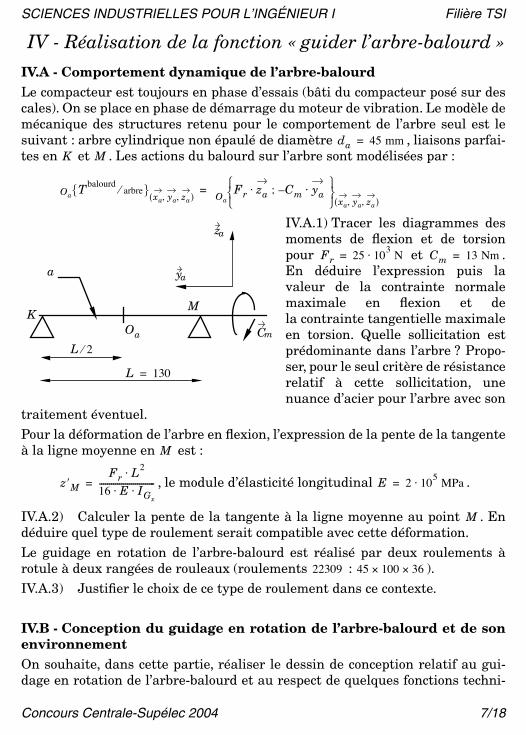
IV.A - Comportement dynamique de l’arbre-balourdLe compacteur est toujours en phase d’essais (bâti du compacteur posé sur descales). On se place en phase de démarrage du moteur de vibration. Le modèle demécanique des structures retenu pour le comportement de l’arbre seul est lesuivant : arbre cylindrique non épaulé de diamètre , liaisons parfai-tes en et . Les actions du balourd sur l’arbre sont modélisées par :
IV.A.1) Tracer les diagrammes desmoments de flexion et de torsionpour et .En déduire l’expression puis lavaleur de la contrainte normalemaximale en flexion et dela contrainte tangentielle maximaleen torsion. Quelle sollicitation estprédominante dans l’arbre ? Propo-ser, pour le seul critère de résistancerelatif à cette sollicitation, unenuance d’acier pour l’arbre avec son
traitement éventuel.Pour la déformation de l’arbre en flexion, l’expression de la pente de la tangenteà la ligne moyenne en est :
, le module d’élasticité longitudinal .
IV.A.2) Calculer la pente de la tangente à la ligne moyenne au point . Endéduire quel type de roulement serait compatible avec cette déformation.Le guidage en rotation de l’arbre-balourd est réalisé par deux roulements àrotule à deux rangées de rouleaux (roulements : ).IV.A.3) Justifier le choix de ce type de roulement dans ce contexte.
IV.B - Conception du guidage en rotation de l’arbre-balourd et de sonenvironnementOn souhaite, dans cette partie, réaliser le dessin de conception relatif au gui-dage en rotation de l’arbre-balourd et au respect de quelques fonctions techni-
da 45 mm=K M
Tbalourdarbre⁄ Oa xa ya za, ,( )
Fr za ; Cm ya⋅ –⋅⎩ ⎭⎨ ⎬⎧ ⎫
Oa xa ya za, ,( )=
a
M
Cm
KOa
L 2⁄
L 130=
za
ya
Fr 25 103 N⋅= Cm 13 Nm=
M
z′MFr L2
⋅
16 E IGx⋅ ⋅
----------------------------= E 2 105 MPa⋅=
M
22309 45 100 36××
SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR I Filière TSI
Concours Centrale-Supélec 2004 8/18
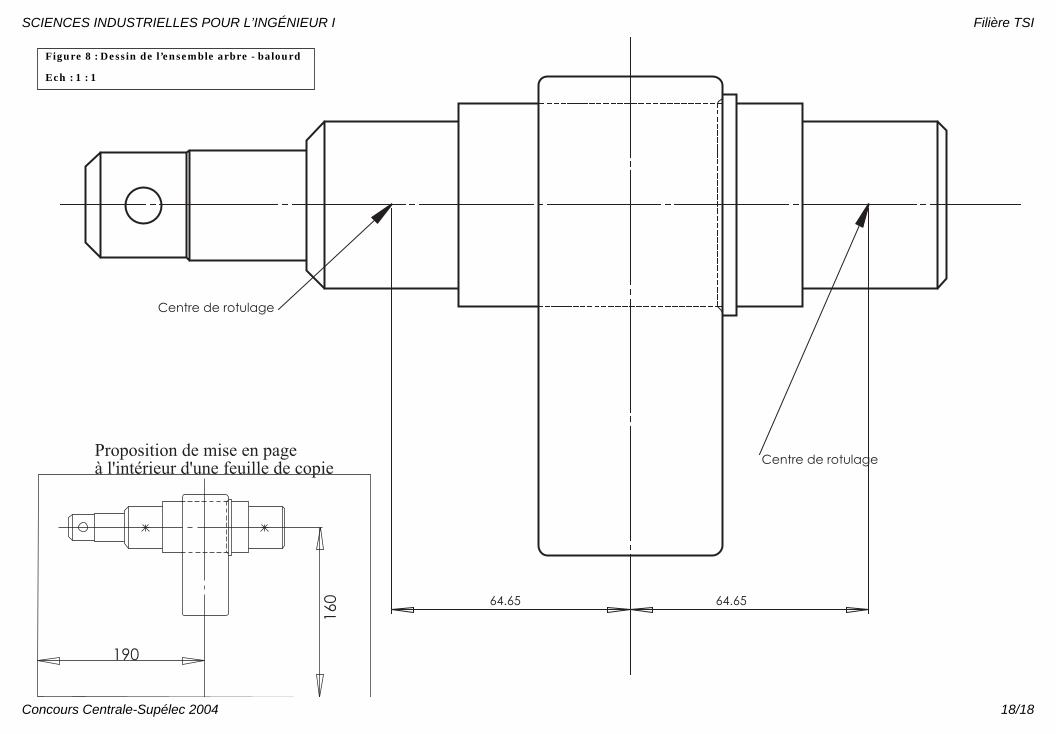
ques. L’arbre-balourd est en liaison pivot avec la cloche de vibration constituéepar un carter en deux parties symétriques assemblées. La cloche est en liaisonencastrement avec le cylindre du compacteur. Le plan d’assemblage des deuxdemi-cloches de vibration correspond au plan médian vertical du cylindre.La lubrification de cet ensemble est réalisée par ruissellement d’huile sur lesparois intérieures de la cloche lorsque celle-ci est mise en rotation par le dépla-cement du compacteur. Il n’y a pas barbotage pour limiter les pertes de puis-sance pour le système de vibration (la masse « balourd » ne pénètre donc pasdans la réserve d’huile). La vérification du niveau et le remplissage se font parle même bouchon, le cylindre étant calé angulairement. Le dessin de l’ensemblearbre-balourd est donné à l’échelle 1 : 1 sur la figure 8. Ce dessin pourra êtrecollé ou recopié partiellement pour la réponse à la question . Une proposition demise en page est donnée sur cette même figure.Réaliser, sur les deux pages intérieures d’une feuille de copie, le dessin d’ensem-ble, à l’échelle 1 : 1 montrant :• le guidage en rotation de l’arbre-balourd. La liaison pivot de l’arbre avec la
cloche de vibration est réalisée par deux roulements à rotule à deux rangéesde rouleaux (roulements : alésage ; bague extérieure
; largeur ). Préciser les ajustements.• la définition de la cloche de vibration. Cette cloche en deux parties est réali-
sée à partir d’une préforme (ou brut) en fonte obtenue par moulageau sable. Le dessin de la cloche pourra être limité à une demi-vue principaleet des vues auxiliaires montrant :
• les surfaces participant au guidage en rotation de l’arbre-balourd,• les zones d’assemblage des deux demi-cloches,• le bouchon de remplissage-niveau et le bouchon de vidange.
La liaison de la cloche avec le cylindre ne fait pas partie de cette étude.• l’étanchéité statique et dynamique de la cloche par rapport à l’extérieur.
V - Étude d’une autre solution constructive pour la réalisation de la fonction « faire vibrer les cylindres »
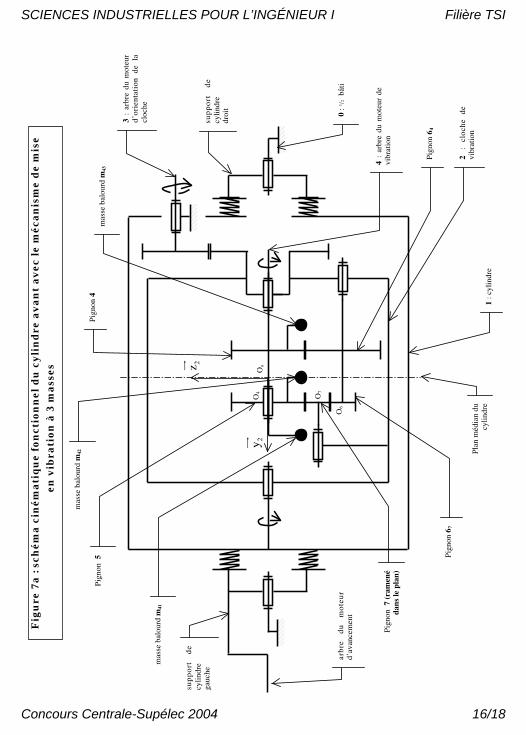
Un autre constructeur propose une solution constructive du système de vibra-tion. L’objectif est d’obtenir une direction fixe, réglable, pour les petits déplace-ments radiaux du cylindre par rapport au bâti. Pour cela, la masse « balourd »est remplacée par trois masses telles que deux masses tournent dans le mêmesens alors que l’autre tourne en sens inverse. La cloche de vibration devientindépendante du cylindre et son orientation est réglée grâce à un troisièmemoteur hydraulique. Le schéma cinématique fonctionnel de cette solution est
22309 d ∅45 mm=D ∅100 mm= B 36 mm=
GJL 300

SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR I Filière TSI
Concours Centrale-Supélec 2004 9/18
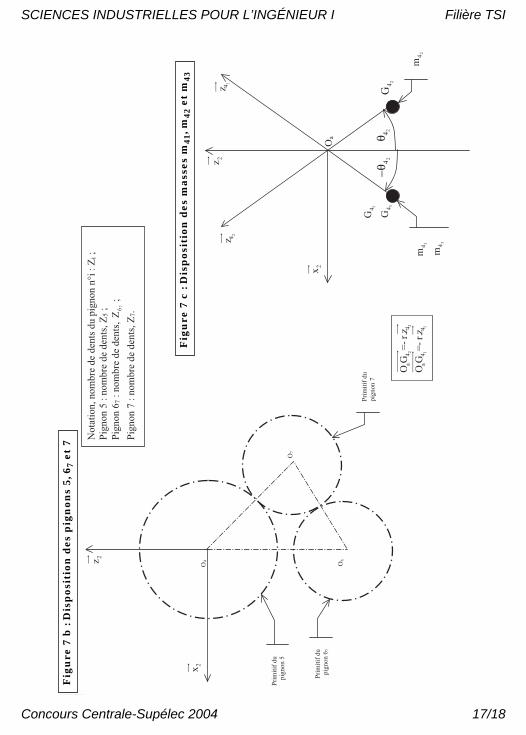
proposé sur la figure 7a. La disposition des pignons , et est donnée sur lafigure 7b. La plage d’orientation de la résultante dynamique du système isolécylindre est de à par rapport à la verticale.Hypothèses de l’étude :• on se place en phase d’essais, le compacteur posé sur des cales, les cylindres
n’étant pas en contact avec le sol,• les moteurs d’avancement sont à l’arrêt,• le moteur d’orientation de la cloche est à l’arrêt,• le moteur de vibration tourne à vitesse constante.
V.A - Justifier l’intérêt d’avoir une direction fixe de vibration, en particulier lorsdu compactage d’un pont.On souhaite que ; avec et ; avec
repère lié à la cloche de vibration .
V.B - Déterminer la relation qu’il faut respecter entre les nombres de dents despignons , , et pour obtenir cette relation entre les vitesses.
V.C - Justifier le rôle du pignon . La disposition des axes de rotation des diffé-rents pignons est donnée sur la figure 7b.Les centres d’inertie , et des balourds de masse , et sont
équidistants de l’axe de rotation de l’arbre-balourd . Les points et
sont symétriques par rapport au plan médian vertical du cylindre
(figure 7c). Au démarrage, les trois points , et appartien-
nent au plan .
V.D - Donner l’expression de la résultante dynamique, en régime établi, du sys-tème isolé arbre + 3 masses « balourd » dans la base liée à la cloche de vibra-tion en négligeant le déplacement du cylindre (donc de la cloche) par rapport aubâti ( fixe). Déterminer les relations qu’il faut imposer entre les masses
, et pour obtenir une direction fixe de cette résultante dynamique.
••• FIN •••
5 67 7
0° 90°
ω52 ω42–= Ω5 2⁄ ω52 y2⋅= Ω4 2⁄ ω42 y2⋅=
R2 Oa x2 y2 z2, , ,( ) 2
4 5 64 67
7
G41G42
G43m41
m42m43
Oa y2,( ) G41
G43
Oa x2 z2, ,( ) G41G42
G43
Oa y2 z2, ,( )
Oa y2,( )m41
m42m43
SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR I Filière TSI
Concours Centrale-Supélec 2004 10/18
Figure 1a : compacteur 214 D
Cylindre avantSupport de cylindre
avant
Moteur
d’avancement,
avant
Cylindre arrièreSupport de cylindre
arrière
Moteur de vibration,
arrière
1⁄2 bâti arrière
1⁄2 bâti avant
Figure 1a : Compacteur 214 D
SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR I Filière TSI
Concours Centrale-Supélec 2004 11/18
Caractéristiques techniquesVitesse d’avancement V 0 à 6,5 km.h-1
Puissance moteur thermique Pm 22,5 kWLargeur des cylindres I 1000 mmDiamètre de chaque cylindre D 700 mmEmpattement B 1730 mmMasse totale Mt 2490 kgModes de compactage Vibration sur cylindre
avant ou sur les deuxFréquence de vibration f 60 Hz
B I
Figure 1 b : caractéristiques techniquesFigure 1b : Caractéristiques techniques
Figure 3 : rendement global du moteur hydraulique
tr.min-1
ehp
Fréquence de rotation de l’arbre du
moteur d’avancement
Figure 3 : Rendement global du moteur hydraulique
SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR I Filière TSI
Concours Centrale-Supélec 2004 12/18
Cylindre arrière
Arbre du moteur devibration, arrière
Support de cylindrearrière gauche
Support de cylindrearrière droit
Arbre du moteurd'avancement, arrière
Masse « balourd »
1/2 bâti arrière
Plots élastiques
Cloche de vibration
Arbre - balourd
1/2 bâti avant
Plots élastiques
Arbre du moteur devibration, avant
Cylindre avant
Arbre du moteurd'avancement, avant
Support de cylindreavant gauche
Support de cylindreavant droit
Masse « balourd »
Arbre - balourd
Cloche de vibration
0y
0x
ar0x
av0x
φ
Figure 2 : schéma cinématique fonctionnel, en vue de dessus, du compacteur
Arrière
0000B (x ,y ,z ), base liée au bâti quand les
cylindres sont parallèles
Avant
Figure 2 : Schéma cinématique fonctionnel, en vue de dessus, du compacteur

SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR I Filière TSI
Concours Centrale-Supélec 2004 13/18
Corps de vérin
Tige de vérin
1/2 bâti arrière
Articulation
centrale avant -
arrière
1/2 bâti avant
0y
0x
fd
g
e
Figure 4 : schéma cinématique fonctionnel du système d’orientation des cylindres
P
Q
R
vv
( ) φ=avarx,x 00
var0x =,u Ψ)(
vu
Axe du cylindre
arrière
Axe du cylindre avant
B/2=865 B/2=865
A B
PR=f.x0ar+g.y0ar
vQR=ρ.vPQ=d.x0av +e.y0av
d = 110 mm
e = 120 mm
f = -320 mm
g = 430 mm
arx0
avx0
φ 0z zav0 arz0
Figure 4 : Schéma cinématique fonctionnel du système d’orientation des cylindres
SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR I Filière TSI
Concours Centrale-Supélec 2004 14/18
55+ 0,03+ 0,06
1900
+ 0,30
110°50 ±0,20
Figure 5a : arbre-balourd
Figure 5b : balourd
Figure 5c : modélisation de l’arbre-balourd et du balourd
δ = 110°
Ri =
35
Db =
55
Re = 95
Balourd seul
La = 232
La/2 = 116
Lb = 50
Da
=45
Db =
55
Arbre
Balourd
Arbre - balourd
( )bbbbb z,y,x,OR , repère lié au balourd
( ) ( )aaaaabbbbb z,y,x,ORz,y,x,OR =
( )aa y,O
balourd
est l’axe de rotation de l’arbre -
Ob
bz
bx
az
ay Oa
Figure 5 a : Arbre - balourd
Figure 5 b : Balourd
Figure 5 c : Modélisation de l’arbre - balourd et du balourd
SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR I Filière TSI
Concours Centrale-Supélec 2004 15/18
Figure 6 : paramétrage de l’arbre-balourd
0x
az0z
ax
θ
Gb
Oa
O0
0z
0x
w
u
α
Cylindre, c
α
Oa: point de l’axe de rotation de l’arbre balourd ; on suppose que le centre d’inertie , Gc, ducylindre, c, est sur le point Oa
Gb : centre d’inertie du balourd seul ;
( )00000 z,y,x,OR , repère lié au support de cylindre ;
( )aaaa z,y,x,OR0 , repère lié à l’arbre balourd ;
( )000 z,y,x,OR ac , repère lié au cylindre ;
( )ax,x0=θ définit la position angulaire de l’arbre – balourd par rapport au bâti ;
( )w,y,u 0 , base associée au calage angulaire du vecteur aOO0 ; ( )u,x0=α définit ce calage ;
w.AOO a =0 aba z.eGO =
Figure 6 : Paramétrage de l’arbre-balourd
SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR I Filière TSI
Concours Centrale-Supélec 2004 16/18
2y
1 : c
ylin
dre
2:
cloc
hede
vibr
atio
n
3:
arbr
edu
mot
eur
d’or
ient
atio
nde
lacl
oche
Pla
n m
édia
n du
cyli
ndre
0 : 1 /
2 b
âti
mas
se b
alou
rd m
41
mas
se b
alou
rd m
42
mas
se b
alou
rd m
43P
igno
n5
Pig
non
7 (r
amen
éda
ns le
pla
n)
sup
po
rtd
ecy
lind
redr
oit
Pig
non
6 4
Pig
non
6 7
O4
O7
O6
arb
red
um
ote
ur
d’av
ance
men
t
Oa2z
Pig
non
4
sup
po
rtd
ecy
lind
rega
uche
4:
arbr
edu
mot
eur
devi
brat
ion
Fig
ure
7a
: sch
éma
cin
émat
iqu
e fo
nct
ion
nel
du
cyl
ind
re a
van
t av
ec l
e m
écan
ism
e d
e m
ise
en v
ibra
tion
à 3
mas
ses
SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR I Filière TSI
Concours Centrale-Supélec 2004 17/18
Nota
tion, n
om
bre
de
den
ts d
u p
ignon n
°i :
Zi ;
Pig
non 5
: n
om
bre
de
den
ts,
Z5 ;
Pig
non 6
7 :
nom
bre
de
den
ts,
Z6
7 ;
Pig
non 7
: n
om
bre
de
den
ts,
Z7.
Pri
mit
if d
u
pig
non 5
Pri
mit
if d
u
pig
non 6
7
Fig
ure
7b
: d
isp
osi
tion
des
pig
non
s 5, 6
7 e
t 7
2z
O4
O6
O7
2x
Pri
mit
if d
u
pig
non 7
Fig
ure 7
c :
dis
po
siti
on
des
ma
sses
m41,
m42 e
t m
43
2z
2x
34
m
14
m
34
G
14G
24
G2
4θ2
4−θ
24
m
24z
14z
Oa
14G
Oa
14z.r-
=2
4G
Oa
24z.r
-=
Fig
ure
7 b
: D
isp
osit
ion
des
pig
non
s 5,
6
7
et
7
Fig
ure
7 c
: D
isp
osit
ion
des
mas
ses
m
41
, m
42
et
m
43
SCIENCES INDUSTRIELLES POUR L’INGÉNIEUR I Filière TSI
Concours Centrale-Supélec 2004 18/18
64.6564.65
Centre de rotulage
Centre de rotulage
Figure 8 : dessin de l'ensemble arbre balourd
Ech. 1 : 1
Proposition de mise en page à l'intérieur d'une feuille de copie
190
16
0
Figure 8 : Dessin de l’ensemble arbre - balourd
Ech : 1 : 1