SaidWorks96-98

of 36
Transcript of SaidWorks96-98
-
7/29/2019 SaidWorks96-98
1/36
EVI TEMENT DES OBSTACLES PAR UN OBJ ET MOBI LE : APPROCHE GEOMETRI QUE
Said M CH AA L IA , J alel EZZINE L aboratoire A nalyse et Commande Systme
E cole Nationale d'ingnieurs de TunisB.P. 37 Campus Universitaire Tunis, Tunisie
Fax (01)872 729
Rsum
Dans cet article nous proposons uneformulation gomtrique sur lvitement des obstaclespar un objet mobile. Pour ce travail, on va considrer leplan du travail comme tant un plan gomtrique deux dimensions dfini par un repre fixe Ro(O X Y),les obstacles comme tant des polytopes dfinis par les
matrices et les vecteurs de contraintes Ai et bi et l'objetmobile comme tant un point gomtrique dfini parses coordonnes (x, y) dans le repre Ro. D'abord, on vaformuler le problme de distance entre un point et unpolytope en utilisant une formulation quadratique quinous permet de calculer la distance entre un polytopedonn et l'objet mobile un instant donn. Ensuite, onva essayer de gnraliser cette formulation enformulant la distance entre deux polytopes. Poursimuler ces deux formulations, on va utiliser lafonction QP de Matlab. La deuxime tape du travailprsent consiste permettre l'objet mobile de savoirse dplacer d'un point du dpart Md (x .y /R^vers un
point darrive Maix yJ /R . Pour ce travail, on vadvelopper deux approches gomtriques; la premirepermet l'objet mobile se dplacer en suivant untrajectoire rectiligne contournante les obstacles, ladeuxime consiste introduire le principe de la logiquefloue pour permettre l'objet mobile de savoir dciderle chemin suivre.Les approches ainsi dveloppes ncessite laconnaissance de formes des obstacles traits. Pour cefait, on va essayer de dvelopper un algorithmepermettant la connaissance de formes des obstaclesainsi dfinis partir des matrices et de vecteurs decontraintes. Pour cette raison, on va mettre en oeuvreun algorithme qui rsoudre le systme d'quations
A.X=b.. pour un polytop i donn, mettre dans l'ordre cessommets pour raliser la forme exacte du polytope.Mots clefs: Evitement dobstacles, logique floue, objetmobile, polytope, sommets, matrices et vecteurs decontraintes.
1/ Introduction :
Le dplacement des objets mobiles ncessite laconnaissance des guides des chemins pour vitercertains obstacles. Le problme qui se pose estcomment permet un objet mobile d'viter un obstacle.Ce problme est un domaine de recherche actuel. Lestravaux de recherche autour de ce sujet ont t lancs
attentivement ds l'anne 1984 avec Freund et Hoyerqui ont mis en place la formulation du problme decollision pour les robots industriels. En 1985, Reif et
Sharir ont essay de rsoudre ce problme. Ils ontdvelopp un algorithme dans le but de chercher unesolution au problme ainsi dfini mais ils ont dcouvertque leur algorithme ne traite que des formesparticuliers des objets et leur travail n' a pas timplant. Les recherches pour rsoudre ce problmeont t suivis avec Fujimura et Samet (1990) et Shih etson groupe (1990 ) . D'une autre cot, on trouve Kant
et Zucker (1984, 1986, 1988) qui ont trait le problmede dcomposition du plan de mouvement. Leurproposition est base sur le fait que le problmed'vitement des obstacles mobiles peut se rsoudregomtriquement en utilisant l'ajustement des vitesses.Dans ce mme axe, Griswold et Eem (1990) ainsi queKyriakopoulos et Saridis (1990, 1991, 1992) ont suivileur recherche (1,2), Shokri Z. Selm etH.A.Almohamad (5) et M.D.S Aliyu et K.S.Al-Sultan(4) . Le problme d'vitement des obstacles par lesobjets mobiles est un problme trs vaste qui peut setraiter de diffrentes manires. Actuellement lesrecherches autour de ce sujet sont orients vers les
recherches autour de commandes et du contrle desmouvements des objets mobiles. Ces travaux ont tcommencs avec Muir et Neuman (1987) dont l'ideprincipale est base sur la dtermination d'un modlecinmatique pour chaque roue et travers ces modles,on peut donc choisir le type de commande et ducontrle des actionneurs des diffrents roues. Dans lemme point de vue, Alexander et Maddocks ( 1989)ont trait diffrentes approches permettants ladterminations des modles convenables. Une autretape dans la mme orientation bien qu'elle introduit ladynamique de l'objet mobile ainsi que les obstacles at mise oeuvre en 1989 par Saha et Angeles . Autreschercheurs tels que Grattinger et Krogh (1989) ont
utilis le cinmatique et la dynamique pour dterminerles diffrents modles. Le concept gnral pour lecontrle des objets mobile a t structur parBorenstein et Koren ( 1985) aprs les travaux deLarcombe ( 1981), Julliere et al. (1983). Dans nos
jours, le contrle des objets mobiles est bas sur lergulateur PID dont les paramtres principaux sont leserreurs de position et d'orientation ainsi que lacommande des roues. Dans cette voie de recherche,Kanayama et al. (1990) a introduit la fonction deLiapunov pour tudier la stabilit du systme considrd'une part et dterminer la structure du rgulateur enbasant sur une tude gomtrique du mouvement (3)
d'autre part. Dans le mme esprit de recherche, ontrouve les travaux de Hemami et al. (1990) qui ontintroduit la rgulation non linaire en conservant le
Evitement des obstacles par un objet mobile: Approche gomtrique Page 1
-
7/29/2019 SaidWorks96-98
2/36
modle dynamique pour un mouvement plane dusystme (3). L'tape suivante de cette approche estralis par Hemami, Mehrabi et Cheng (1992) dontl'objectif est de chercher le contrle optimal d'un robotmobile possdant trois roues, deux arrires motrices etun en avant directrice, effectuant un mouvement plane(3). Les pas de cherche basant sur le principe de ladtermination de contrle optimal du mouvement desobjets mobiles s'avancent pour permettre l'amliorationdes objectifs ainsi dfinis. Dans ce cadre, MarkosPapageorgiou et Alexander Steinkogler ont introduit lanotion de temps rel pour la recherche de rgulationoptimale des mouvements des objets mobiles (6). Dansle mme esprit mais en introduisant la logique floue,
T.W.Vaneck (1996) a dvelopp un contrleur flou enutilisant le langage C pour fournir un bateauprototype la possibilit de savoir se dplacer d'unemanire autonome (7). Sur le mme point de vue, ontrouve les travaux de N.Achour et R.Toumi (1998) quiconsistent raliser un contrleur flou pour un robot
mobile possdant trois roues (8) ainsi que ceux deS.Berrabah, C.K ara Terki et N.Ghouali ( 1996) qui onttudis la navigation d'un robot mobile ayant quatreroues deux arrires et deux avants l'aide d'un rseauxde Neurone Formels et Logique Floue (9).Dans notre cas et pour simplifier ltude, on va faireune tude gomtrique plane en introduisant la notionde reconnaissance des formes des obstacles ainsi qu'une slection off-line du chemin. Ces travaux sontraliss sur un point matriel. Pour ce fait, nous avonsdvelopp trois approches.La premire approche consiste considrer lesobstacles comme tant des polytopes et l'objet mobile
comme tant un point matriel se dplaant dans unplan contenant ces polytopes.Pour cette raison, on est ramen considrer lesprojections des obstacles dans le plan du travail. Pourfaciliter la tche, on va considrer ces projectionscomme tant des polygones convexes.Dans cet article on va essayer de dvelopper troisapproches.
Nous commencerons par la description desoutils du travail tels que l'objet mobile considr ainsique les obstacles, ensuite nous dtaillerons laformulation mathmatique du problme ainsi que lesdiffrents algorithmes proposs et les rsultats obtenus
en simulation.I I / Description d'environnement :
1/ Objet mobile: l'objet mobile faisant l'objetde notre tude est considr comme tant un pointgomtrique pouvant se dplacer dans n'importe quelledirection. Le dplacement de ce point se fait l'aide deconnaissance de ses coordonnes chaque instant.La figure 1reprsente cette description.
figure 1
2/ Obstacles : les obstacles considrs pourcette tude sont des polygones convexes ( polytopes )dont la forme est donne par A X < b o A et b sontla matrice et le vecteur de contraintes.La connaissance de forme du polytope ncessite larsolution du systme d'inquation dfini ci-dessus.Pour ce fait, nous avons dvelopp un algorithmepermettant de tracer un polytope donn en rsolvant le
systme d'quations A X = b et triant les sommets.Le dtail de cet algorithme sera fait dans le paragraphesuivant. L a figure 2 reprsente une forme quelconqued'un polytope donn
figure 2I I / Formulation du problme :
1/ Distance entre un point et un polytope:
La formulation de ce problme consiste utiliser laformulation quadratique en basant sur la normeeuclidienne.
La distance entre un point M
\ y )
du plan et un
polytope P dont la position dans le plan dcrit par (S) :
A X < b estd(M ,P ) = min M ,eS
avec d(M ,Mi ) = N2(M - A/,- ) ( l)o
N,est la norme euclidienne.La programmation quadratique consiste dfinir ladistance sous la forme :
minx (1/ 2 X ft f X - C 'X ) sachant A X
-
7/29/2019 SaidWorks96-98
3/36
Le problme (1) sera donc traduit sous la formesuivante :
( S) : A X
-
7/29/2019 SaidWorks96-98
4/36
autre point aussi proche du point d'arrive sans avoircollision avec le polytope soit le point M14.
- Troisime tape : l'objet mobile considre lepoint M14 comme tant le nouveau point du dpart etva procder de la manire prcdente. Autrement dit, ilva tester la possibilit de dplacement vers le point dudpart sans avoir collision avec le polytope . Si ce
dplacement et possible, on passe au polytope suivant.Sinon, on cherche ce dplacer vers un autre sommetaussi proche du point du dpart ( dans ce cas le pointM13).
- Arrivant au sommet M13, l'objet mobileeffectue le mme test que prcdemment. Dans le casde figure, l'objet mobile va considrer le sommet M13comme tant le nouveau point du dpart et il va faire lamme chose que prcdemment.
- Le polytope P2 ne sera pas pris en comptecar l'objet mobile peut se dplacer du point M13 vers lepoint d'arrive sans traverser ce polytope. Le polytopesuivant qui sera trait, sera le polytope le plus proche
du nouveau point du dpart et qui n'a pas d'intersectionavec la droite (Md Ma). Dans notre cas c'est lepolytope P3.L'objet mobile suit le mme raisonnement queprcdemment au cours du traitement du polytope P3.Le chemin parcouru est indiqu par les flches Fl,F2,....,F8. La flche FF4 indique le chemin prvu dansle cas d'absence d'autre polytope traiter.
2/ Dplacement l'aide d'un contrle flou:Introduction:
Cette partie traite lide de savoir
dplacer un point du plan d'un point du dpart Md versun point d'arrive Ma en vitant tout polytoperencontr.Pour ce fait, on va utiliser deux contrleurs flous dutypes SUGENO.
-Premier contrleur "atteindre le pointd'arrive'': qui a pour entre la distance entre le pointdu dpart et le point d'arrive et pour sortie la dviationque le point du dpart peut faire pour arriver au pointd'arrive.
d (M d .M a)C o n tr l e ur 1 : 5,
atteindre le point d'arrive
a- Rsultats de simulation
b-Conclusion :
Pour conclure sur cette approche, on ditquelle permet un dplacement de l'objet mobile d'unpoint du dpart Md vers un point d'arrive Ma bienqu'elle ne donne pas le chemin optimal dune part etdemande plusieurs tests faire ce qui ncessite un
hardware puissant d'autre part. Cette approchenanmoins a des avantages ; d'abord elle nous permetde localiser les dfauts et d'autre part trouver undomaine d'application ce type du dplacement d'objetmobile. Ce qui concerne ce deuxime point, on peutdire que ce type du dplacement peut intresser lesrobots soldats par exemple qui cherchent se cacherderrire les obstacles.
On associe la variable d(Md,Ma) sept sous-ensemblesflous:TG (Trs Grande), G (Grande), MG (MoyenneGrande), M (Moyenne), MP (Moyenne Petite), P(Petite) et TP(Trs Petite).La table d'infrence est donne par la figure suivante
d TG G MG M MP P TP
5, 10 20 60 90 60 20 10
A partir de cette table, on peut dduire la fonctionreliant la distance d et l'angle S,.
-Deuxime contrleur " viter le polytope " :qui a pour entre la distance entre le point du dpart etle polytope et pour sortie la dviation que le point dudpart peut faire pour viter le polytope.
d (M d.P) Contr l eur 2 : 2Evi ter le polytope
Avec :
Ma.
- Ma: le point d'arrive un instant t donn.- Md: le point du dpart un instant t donn.- d(Md,Ma): distance entre le points Md et
M (1M a M d o M a o
angle entre la droite "variable" (MdMa) ainsi forme chaque instant et la droite "initiale" (MdoMao).
Avec :- P: le polytope en cours d'excution.- Md: le point du dpart un instant t donn.- d(Md,P): distance entre le point du dpart
Md et le polytope P.
S2 = MdMa M d o M a o
angle entre la droite "variable" (MdMa) ainsi forme chaque instant et la droite "initiale" (MdoMao).
Evitement des obstacles par un objet mobile: A pproche gomtrique Page 4
-
7/29/2019 SaidWorks96-98
5/36
On associe la variable d(Md,P) sept sous-ensemblesflous:TG (Trs Grande), G (Grande), MG (MoyenneGrande), M (Moyenne), MP (Moyenne Petite), P(Petite) et TP(Trs Petite).La table d'infrence est donne par la figure suivante
d TG G MG M MP P TP
8, 10 20 60 90 60 20 10
A partir de cette table, on peut dduire la fonctionreliant la distance d et l'angle Sr
a-Rsultats de simulation:
3 0 0 -
20 0
100-o------------------ ----------- ---- *--------- -
0 200 400 600 800 1000
1OOOr
900
eoo
700
600 -
50 0 -
400
2 00 -
100-0 * * ---------- ----------1--- - 1
0 200 400 600 800 1000
Dans cette figure, on a trois formes dun mmepolytope suivant les ordres des sommets. En effet, lessommets du polytope sont M l(l,l ), M2(6,0),M3(10,l), M4(10,4), M5(8,8), M6(5,9) et M7(l,4),pour pouvoir tracer la forme convenable du polytopeen Matlab, on doit indiquer l'ordre qui sera parcourulors du traage. Entre autres, Matlab permet le traaged'une ligne ferme l'aide de l'instruction plot en luiidentifiant le point du dpart ainsi que les autres points
en respectant l'ordre du parcourt en fin en donnant lepoint d'arrive qui ne sera que celui de dpart.
1000 -
9 00 -
800-**-
-
7/29/2019 SaidWorks96-98
6/36
-
7/29/2019 SaidWorks96-98
7/36
6',mr Colloque Maghrbin sur les Modles Numriques de l ingnieur (C2MNI6), 24-26 Novembre 1998, Tunis
Bond Graph Modelling and System Supervision Developing of Battery Sheet
Formation System
M CH AA L IA S.
-
7/29/2019 SaidWorks96-98
8/36
carte viergscarte programme
Figure 2: perforic programming card.Charging program is obtained into the entailmentpistes in every sector. W e find 16 sectors that are:- 5A , 10A, 10A, 25A, 50A, 100A and 100A: sectors1,2,3,4,5,6 and 7- pause time: sector 9
- 30 second and 30 minute during program: sectors13 and 14- polarity inversion: sector 10- program defilement: sector 11
- stop program: sector 16The charging program application is specified intocard optical learning with the card learner.
This type of system control provides much damage.To operate the human and material security andbattery quality, we will study the sheet formationcontrol automation.
Therefore, we propose to realise a systemsupervision to control the sheet formation andminimise the damage that can happen in case ofdefaults.
The main idea is to determine the sheet formation
model using bond graph technique in order to createsystem supervision permitting the on linesupervision.
2. M ODELL ING AND CHOOSINGAUTO M AT I C CO NTR O L SYSTE M
The automatic control system has been determinedinto the bond graph system model.M any reasons make us choose the bond graph todetermine the system model:
the present system is mixture of different type
systems (chemical system, electrical system,mechanical system).physical system unknowledge.
Figure 11 presents a bond graph system model.In this model, we can study the controllability andobservability and simulate the on line controlsystem.
Time (second)
Figure 3: Voltage variation
250
200
150
KA) 100
Time (second)
Figure 4: Current variation
Time (second)
Figure 5: Capacity variationFigures 3, 4 and 5 illustrate the simulation results.In these simulation results, we are developing asystem supervision. To fulfil this object, twointerfaces have been developed: User-PC interface
through an object-oriented program and PC-M aterialinterface through hardware that we have developed.
PC-M ATERIA L INTERFA CE DESCRIPT I ON
The basic idea is to find a PC-M aterial interfacedescribed by figure 6.
-
7/29/2019 SaidWorks96-98
9/36
The principal developed card are: A ddress decodingcard, Input-output card, A nalog-D igi tal conversioncard and multiplying card.
PC-USER INTERFACE DESCRIPTION
This interface is obtained into an object-orientedprogram such has been made in (under) windows
environment by using B orlandC" language.To identify system control, we have developed thecontrol algorithm described by figure 7.
Figure 7. Control system algorithm
Based on this algorithm, we can identify the controlof considered system.
3. CONCLUSION
This paper presents a method to solve industrialproblems with a minimal cost.
Choosing the model techniques involves a great dealof research. Using bond graph technique to modelunknown physic systems is an efficient solution forsome application.
The developing system supervision is convenient inthis application. However, to change the systemcontrol structure by creating a converter control card
is an efficient solution.
The plant condition does not permit a developedsystem implanting. Therefore the simulation resultspresent the advance of such created system.
4. REFERENCES
[1] A usderau A., "Fonctionnement, description ettraitement des accumulateur lectriques",4me dition, Peseaux, France, Dec, 1958.
[2] Borne P. and al./'M odlisation etidentification des processus ", Tome 2,Edition Technip, Paris,France, 1992.
[3] M chaalia S., "M odlisation et Commande onL igne de Systmes de Formation des Plaqueset de Charge de Batteries ", PFE, ENIT.
Tunis, Tunisia, July, 1997.[4] Roberi L Smith J ., "Control batteries, power
system life savers", IEEE, IndustryA pplication M agazine, pp 18-25, Nov/Dec,
1995.
5. APPENDIX
F
j .' J n edl otm al lo n---------- -----------
letup 'C l
iS
Figure 9: Parameter Stock item
F T A T D U PARAMFTnF T H AI T F
___________
r.''
Figure 10: Parameter State Item
-
7/29/2019 SaidWorks96-98
10/36
Sel ;Vphl
C:C,
TH
C:C2
TSe2-Vph2 jj g -
%
Se3- ph3
C:C3
j .
Figure 11: System bond graph model.
-
7/29/2019 SaidWorks96-98
11/36
Ilmenau Technical UniversityTechnische Universitt Ilmenau
Microwave DepartmentMicrowellentechnik
MCHAALIA Said
Electrical EngineerENIT, Tunis, Tunisia
MEASURMENTS WITH AN11 GHz NOISE RADAR
T raining period: 20 October .. 20 December 1998
-
7/29/2019 SaidWorks96-98
12/36
This training is realised in the Microwave Department in the Technical University ofIlmenau (TechnischeUniversitt Ilmenau, Institut fr Kommunikations und Metechnik,Mikrowellentechnik und Informationtechnik ), Germany, under the direction of misters:Doctor Ralf Stephan, and Professor Heinrich L oele.
I thank Professor Loele very much for my acceptance in hisdepartment and his permanent maintain.
I want to thank Doctor Stephan very much for his help and hisconsideration and the suitable relation.
I would like to thank the IASETE Committee very much whooffered me this training and the best staying in Ilmenau, andpartically K atrin Berthold.
In the end, I want to thank the Staffof theTechnical University ofI lmenau, and the German People very very much for their goodwelcome.
- {(c/ aa/ i a {Pai d
-
7/29/2019 SaidWorks96-98
13/36
Said Mchaalia Ilmenau, December 1998
Measurements with an 11 GHz Noise RADAR
1/ In t rodu ct ion :
Several researchers are Interested In the transmlssion-reflection-absorbation phenoma
investigation. The main subject of this field is to valid the transmission signal theory and to
putout the getting received signal behaviour for each used transmission-reflection type in order
to study the delay time effect. This field presents many applications: moving object detections,
the high frenquency signal transmission, mobile telecommunication, ...
In this pratical training we are interested to develop a measurement system of a noise radar
based on the use of a PC and a telecommunication systems (receiver, transmitter, RF
Generator, amplifiers, multiplier, mixers, data delay line device, wave guide systems, signal
dividers, ...). So, we consider two channels; a measurment channel, which mainly contains;
transmitter (antenna), receiver (antenna), amplifiers, and mixiers, and a reference channel,
which principaly contains; delay time system (delay line device, frequency shifter and switched
line systems), amplifiers and mixiers. However, for the measurment channel, we are interestedto transmit and receive a signal based on the antennas, for the second one, the main idea is to
vary a delay time device and to compare both channels.
The main object of this training is to study the correlation between the reference channel signal
and the measurment channel signal function of each introduced delay time type. This correlation
is determined by a correlation function corresponding to the output signal. P racticaly, the
correlation function is caracterised by the output multiplier which multiplies the reference channel
output signal and the measurement channel one.
For each introduced delay time type, the first step consists to move the reflector position in order
to determine the position getting the maximum amplitude signal in the output. The next step
consists to vary the reflector position In an interval centering in the founded position to study the
output variation. After, we put the reflector at the founded position and look for the output signal
for a delay time variatiom from the smallest value to the greatest one. The object of the delay
time variation is to determine the equation: reflector position= function(delay time variation) in
order to study the new position getting the maximum amplitude signal and to deal with the
change of the maximum amplitude signal value. Then we diccuss the obtained results.
However the first expriment looks for the founded position for each chosen line when any delay
time is not considered (only the produced delay lines), the second one treats the sweeping delay
time elimination by an introduction of a data delay line device. For this one, we investigate the
output signal when we vary the delay time between 3ns and 4ns. This variation is based upon
a control voltage variation between 10V downto 1.3V. The third expriment investigates the use
of some others delay time devices: RFT ('Posaner1) which permits a manual delay time variation
between 0 to 0.85ns throughout its length variation, hp8743 (RTTU: Reflexlon-Transmission Test
Unit) which gets a manual delay time variation between 0 to 1ns into an inserted electrical lengthbetween its input and its output, and 2 delaies IC sytem which gets an electrical delay time
variation between 0 to 1.4ns based on a control voltage variation. The next expriment consists
to valid the obtained results. Then to give an explication for each output graph behaviour. In the
first step, this expriment considers the mechanical delay system and investiges the getting
output curves for each position of this instrument. In the second step, it changes the mechanical
delay line device by an electrical delay line device, which is the two delaies IC in order to look
for the difference between the electrical insered delay time and the mechanical one.
The next expriment consists in an advanced studies of the hp8743 and the switches positions:
inside the frequency schifter system, all outside, and each inside and the other outside. In this
expriment, we are interested to getout the difference between the different obtained output
behaviour and to give an explication for these results. In the other hand, we are interested to
study the shift frequency system effect, exactly the mixer effects. For this expriment, we consider
1
-
7/29/2019 SaidWorks96-98
14/36
only the mechanical delay time system. In one case, we present the diffrence between the
electrical delay time system and the mechanical one through a comparaision between the
obtained curves.In an other case, we investage the difference between the moving reflector
position results and the other results when we fix the reflector position in the founded position
getting the maximum signal amplitude and we vary the delay time. An other step of this
expriment gets the difference used switched line numbers. Thereby, it treats the difference
between getting results using 4 switched lines and the results when we consider 8 switchedlines. In the next step it investages the difference between getting results when we start with the
short line ( L, ) and when we start with the longer one( L8 ). This step consists to getout the
output singal behaviour function of the chosen delay time direction.
In the conclusion of this training, we wil putout the difference between the differented used delay
devices, discuss the obtained resulats and present the perspectives of such work.
2/ Considered system descr ip t ion:
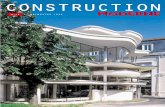
In this paragraph, we present the considered system.
Mestrecke
PC
Figure 1: Block diagram of an 11 GHz Noise RADAR
Figure 1 presents the used system. We distinguish:
/- a noise generator: is a broad band generator. It generates a noise signal with an used band
width between 10.7 and 12 GHz.f
i ii/- a signal divider: this sytstem divides the output of the noise generator on two distinguishedoutputs by maintaining their phases. The first output has the same amplitude as the generator
output (transmitted signal), the second one has a 20 dB lower signal level (reference channel).
ill/- a transmitter: the first signal divider output is an antenna input which is used as transmitter.
So, the antenna send the signal to the reflector which is a metalic plate.
iv/- a receiver: is an other hory antenna used to receive the reflected signal. The receiver input
signal is equal to the transmitter output adding a delay time caracterising the measured scerery.
v/- amplifiers: four amplifiers are used. The first one Is placed after the receiver device. Its object
is to amplify the receiver output. The second one is placed in the other line: i.e its input is the
reference channel output. The others are placed after the multiplier: one in the meaurment
channel and the other in the reference channel. The all amplifiers have the same gain value (
30dB).
2
-
7/29/2019 SaidWorks96-98
15/36
vi/- a mono-frequency generator: this generator is the local oscillator for the frequency
converters of a monochrome signal with a fixed frequency value 9.75 GHz. This generator
output is a mixer input for the frequency conversion in both channels.
vii/ two mixers: one is placed in the measurment channel and the other in the reference
channel.
viii/ a delay 1C: this device is installed in the reference channel and shifts the signal to 0.95 ..
2.25GHz in order to study delay time effect. It is a set of delay data lines. In the first step, it is
formed by two switchs ( waveline inc., S 18073, S/N0001 ) connected by variable length lines
(L,:20cm, 1-2:40 cm, L3:60cm, ...). Switching between the lines is done by a control PC by an
interface card. The signals path this system with a frequency between 0.95 and 2.25 GHz.
Choosing lineviaPC
8switch lines present diffirent distances
Figure 2: Switched line
system
Figure 2 shows the first used delay time system.
In the second step, we have introduced an other delay time system connected in series with
the first one. This system is composed of:
a- delay data line device (QDB1005, 7K): works with frequencies between 0 and 300 MHz. A
control voltage is variable between 1.3 and 10V in case to obtain the minimum delay time value
(which is 3.3ns) for 10V and the maximum one (which is 4ns) for 1.3V. The control voltage
variation is generated by a software into a PC. The communication between the PC and the
others instruments is through an interface card (Meilhaus.300) which permits switching lines into
a choosen digital data output (using DIO ports), control voltage value into D/A converter
channels, and store output variation using A/D converter channels. And based on our program,we can generate all these functions and display output data graphically.
b- two mixers(M DC -123): one is placed before the delay data line device which mixtures the
refrence channel amplifier output and a signal divider output, and the other after this instrument.
It mixtures the delay data line device output and the second signal divider output. The output of
this amplifier is the switch lines input.
c- signal divider(Mini-circuits, 15542, ZESC-2-4): this system has one input which is the RF
i generator output ( noise signal with a frequency of 2 GHz) and two equal outputs.
d- Two filter-amplifiers (0.5 ... 2.5 GHz, wb=15dbm): however the first one is used to filter and
amplify the RF generator output, the second one is used to filter and amplify the switch linesinput.
3
-
7/29/2019 SaidWorks96-98
16/36
Choosing line via PC
2 1..2GHZ
! oMixer Mixer Amplifier
)I FIF
Mechanical delay time system: hp8743B
Signal Divider
2 GHz 2 GHz
Amplifier
O I GHzFrom Network Analyzer
1.5.. 2 GHz
g.1
Vo ut
12GHz 12 GHz
8 switch lines present diffirent distances
Figure 3: Time delay sytsem presentation
Figure 3 presents the time delay system.
ix/ an output multiplier: this one is used to multiply the measured channel output and the
reference channel one and to give us the measured output signal.
x/ a low frequency filter: capacitor-inductor ( C=1pF and L=38pH ) filter with a frequency f=25
KHz. This filter is used to eleminate the noise that can be produced by the high frequency and
permits us to measure an DC output signal without noise. It means that filter seperatesDCsignal.
L = 38>aH
Fromiheoutput correlator O
T K X J -
_ Q To the inter facecard: ME-300
Figure 4: Used filter presentation
Figure 4 describes the developed filter.
xi/ a PC: generates the measurments throughout an interface card (meilhaus. 300) and a Pascal
language program which permits choosing lines, control voltage variation, and displaying data
output.
- Interface card: Meilhaus.300 (ME -300): It is an interface card for IBM-AT and compatible
(with ISA-16 bit stuck capacity) with A/D, D/A converters and 24 TTL input/outputs. We can
make software generating this card using a Pascal or C languages in Dos or Windows
environments.
It contains mainly:
4
-
7/29/2019 SaidWorks96-98
17/36
a- A/D converter (ADC: MAX176): generates 12 bit word througthout 16 channels (A/D channel
0 to A/D channel 15) or 8 diffirential input channels and a multiplixer. Its frequency is variable
until 200KHz. The manipulation of the converter elements (bloc, input type: single or multiple,
timer, trigger and interrupt mods, choosen channel number, unipolar(positiv values) or
bipolar(positiv and negativ values), gain) is into the software. Two types of programmig converter
are distinguished: PGA 203 for which the gain is one of {1,2,,4,8}and the unipolar voltage value
is one of {0 .. 10V, 0 .. 5V, 0 .. 2.5V, 0 .. 1.25V}, and PGA 202 for which the gain is included in
{1,10,100,1000} and the unipolar voltage value is in {0 .. 10V, 0 .. 1V, 0 .. 0.1V, 0 .. 0.01V}. The
choice of one of these types is through the software. The converter receives its input via a Sub-
D connecter (50 pins). This converter is coupled to AT-Bus via a galvanic isolation (opto
electronics coupling). This converter is alimentated by 3 W DC/DC converter.
b- D/A converter (DAW: AD664): generates a 12 bit word through four D/A channels (channel A,
channel D). It is connected directly to the 16 bit data bus and the 8 bit adress of the PC. It is
isolated by 1W DC/DC converter which makes the D/A converter alimentation and its galvanic
isolation. To secure the converter, each channel is connected to the grownd of the converted
AGND DAW) by a resistor and capacitor which the system gain is 3dB for the frequency
(Eckfrequenz).
c- Digital I/O system (BCT543): generates an input or output word of 8 bits throughtout a
choosen DIO port ( DIO P ort A0, .., DIO P ort A7, or DIO Port B0, DIO P ort B7, or DIO P ort
CO, .., DIO Port C7).
Only one of these ports is choosed for a digital input or output. This is done with a sofltware.
d/ R egisters: we distinguish two types of registers: a 8 bit register which is used for the control
of channels, timer, ports, ..., and a 16 bit register which is used for the instantinous storage of
data.
e/ Timer (71054): is a synchrone with the 8253 compatible. It has three 16 bit timer. However
the first one and the second are cascaded, the third one is independent. The second onegenerates a frequency of 1.5MHz. The third one generates a frequency of 3MHz. The output of
the first one activates the channels. The activation channel time is controlled via the scan-time
input of the first one which permits the control of activation of a channel.
Figure 5: Used interface card.
Figure 5 presents the used interface card (meilhaus.300)
- Software description: as mentioned the interface card is programed using Pascal or Clanguages and the work environment (Dos or Windows). We think to use the Pscal language
5
-
7/29/2019 SaidWorks96-98
18/36
and the Dos environment because that presents an easier task.
The main object is to develop a program generating choice line, control voltage variation in order
to vary the delay time, storage of the data system output in a data file and displaying stored data
graphically.
Other the main developed program, we have realised others needed programs:
. program looking for the PC as an oscilloscope to permit us to localise the maximum
output variation better than the use of an other instrument bacause we can vary the output
visualisation in the PC fastly as we want.
. program loop measurments for three lines. This program makes n cycles of measurments
for three lines (L,, L,, and L3), when n is identified by the user.
.program identifys necessary delay time for each line in the first time, then for three lines.
Thereby, we have considered a set of delay times {228ms, 20ms, 10ms, 0ms}in oder to identify
the needed delay permitting transmission-reception signal without attenuation as fast as
possible.
The storage received output in a data file permit us to load this file in Matlab environment when
we need it and make some calculations ( graphics, max-min determination, ..).
The program execution velocity is function of considered delay time for data transmission and
reception.
Figure 6: The main developed algorithm
Figure 6 presents the main algorithm for control voltage variation, transmission data to the
hardware, reception data from the hardware and graphics displaying.
3/ First expr iment:
In this expriment we look for the maximum position determination. We'distinguish two types
of position measurments. One, when we consider a fixed delay time in the reference channel
and the other when we introduce the variable delay line system
6
!
-
7/29/2019 SaidWorks96-98
19/36
-
7/29/2019 SaidWorks96-98
20/36
same thing as the first expriment. Yet, in this step, we consider three delay values in order to
test the parameters of the considered instrument.
The delay 1C contains a loaded transmission line with variable load capacitors. The control
voltage changes the capacitance of C-diodes. The delay variation interval is defined by the
control voltage variation.
To determine the distances, we are thinking about the use of the PC like an oscilloscop.
Thereby, based on a manual variation of the reflector and the visualisation of the correspondent
voltage (measured output) using the PC, we have identified the position giving the maximumumamplitude at the multiplier output. Then, we measure the distance between associated position
of the reflector and the antenna for the choosen values of the control voltage. Three values 2,
5 and 10 V are considered.
Voltage: 2 V Distance
L, (20 cm) 169 cm
Lg (40 cm) 181 cm
l_ 3 (60 cm) 198 cm
Voltage: 5 V
L, (20 cm) 163 cm
l_ 2 (40 cm) 178 cm
l_ 3 (60 cm) 193 cm
Voltage: 10V
L, (20 cm) 159 cm
L_ 2 (40 cm) 172 cm
l_ 3 (60 cm) 188 cm
Table 2: Position measured for a diffirent delay value
Table 2 presents three different measured positions of the reflector for three control voltage
values: 2, 5, and 10V.
We verify the influence of the used data delay line device. Thereby, we note that for the
minimum voltage value, we obtain the larger distance between the antenna and the reflector and
for the maximum one, we obtain the smaller distance. So, we verify the IC system parameters.
The difference in the delay time is about 0,7 ns (corresponding to 10 .. 11 cm shift in the
reflector position). It means that for a reflector position variation from the minimum position to
the maximum one, we get a delay time of almost 0.7ns. So, we can consider three delay timetypes:
- the first one is relatively to control voltage variation: when we vary the voltage form the
minimum value to the maximum value, we produce a delay time of almost 0.7ns. This is verified
by the maximum position founging operation: For example, for the first line, we have found the
maximum position at 169cm when we have considered 2V. But we have detected the maximum
position at 159cm, when we have considered 10V. So, we obtain a maximum founded position
variation of 10cm corresponding to 0.66ns of delay time.
- the second one is relatively to the reflector position variation: when we move the reflector from
a position to an other one, we get a delay time ( for each 30cm, we have a delay time of 1ns).
- the third one is relatively to the chosen line: each line has a defined length different than the
other. So, for each choosen line, we introduce a delay time of ( length(chosen line)(cm) / 30 )ns.
8
-
7/29/2019 SaidWorks96-98
21/36
finding maximum position for Uc=2v finding maximum position for Uc=5v
100 200 300 400 500 600Value nb referring to moving reflector position
100 200 300 400 500 600Value nb referring to moving reflector position
Figure 8-a: founding maximum position
for linel and Uc = 2V
Figure 8-b: founding maximum position
for line 1 and Uc = 5V
finding maximum position for Uc=10v
100 200 300 400 500 600Value nb referring to moving reflector position
Figure 8-c: founding maximum position
for line 1 and Uc = 10 V
Figures 8-a, b and c show the maximum position variation for three control voltage values(2, 5,
and 10V) and when the first line is choosen. The x-axe presents measurment numbers referring
to the moving position of the reflector. We note that 200 points present a 1m reflector position
variation from the right to the left ( it means that the initial position is the nearest one to the
antenna). Every 200 points, we get the reflector in its initial position and move it in the same
direction as the first step.
3/ Second expr iment :
In this paragraph, we present the main object of our second work then we describe the
expriment results when we consider only three switched lines. In the end we diccuss the
obtained results.
We can consider that the delay time is a function of control voltage. The minimum delay value
(which is 3.3ns ) is for 10 V of the voltage, yet the maximum one ( which is 4ns) is for 1.3 V of
the voltage.The system maintains a fixed delay time between its input and its output for
frequencies between 0Hz and 300MHz.
Here, the main idea is to vary the delay by means of the analog control voltage variation
9
-
7/29/2019 SaidWorks96-98
22/36
between 1,3V and 10V, and to look for the output graphs for each line. But, the choice of a new
fixed line makes an other delay for considered system.So, when we consider all measured delay
time with only fixed three lines, we obtain a delay time Interval l=[-1ns 2ns].
The main problem for this expriment is that we can not determine the needed time to send and
receive the signal. However we have not any idea about the delay IC time constant, we have
consider a delay of 228 ms for each transmission of a choosen control voltage value.
Besides, we can not determine the number of measurments which we can obtain when we vary
control voltage between two successiv values. So, the main idea is to consider a set of delay
values {0, 1, 20ms} and to look for the system output. This presents an other step that we have
treated in this expriment in order to investigate the system output for each chosen transmission-
reception delay time in the program.
figure 9-a: With a delay time of 20 ms. figure 9-b: With a delay time
of 1 ms.
figure 9-c: Without any delay time.
Figures 9-a, b and c present the output visualisation for three values of the delay time choosing
in the program in order to identify the system response and the necessary time for the
transmission and reception. We note that without any delay time ( it means that we consider a
transmission-reception delay time of 0 ms), we can obtain an output graph corresponding to the
right form but presents a noise which we can eliminate when we consider a delay time of 1ms.
So, we conclude that the minimum transmission-reception delay time is about 1ms.
Theoriticaly, we have a small output frequency variation (a little frequency band because we
10
-
7/29/2019 SaidWorks96-98
23/36
have reduced it based on the delay 1C system which has a frequency band of 0.3GHz) in the
interval [-1ns 2ns]. That equal to say, we obtain a small variation of the maximum position in
this interval J =[ 159cm... 198cm], when 159cm is the first line position for the minimum delay
time value ( 2ns: 10V ) and 198cm is the third line position for the maximum delay time value
(1ns: 2V). Normaly, we get the maximum position in 0 ns point in the interval I which is equql to
the middle between the larger third line poistion and the smaller first line position
(159+198)/2=178.5cm).
But, expremently, when we are using a three switched lines, we note that the reflector position
variation in the interval J gives a diffirent graph forms not similiar to theoritical results. On the
hand, we note that only at 195.5cm point, we can get a graph giving three maximum positions.
We can explain this by: the obtained graph presents a fast variation in the interval I. So, the
output variation is function of the reflector position and the delay time. At each reflector position
in the interval J , we have one maximum position relatively to the delay time varition based upon
the control vaoltage variation. This provides the theoritical results. For, example, if we consider
10-a and if we join the pics, we obtain a graph presented the output variation for a delay time of
4.7ns. To refer to this delay time value, we have considered measurment numbers (525 value
numbers referring to 4.7ns of delay time). If, we gte the reflector in the maximum position and
we switch the three lines we obtain a graph similiar to the theoritical output varition in the
interval [-1ns 2ns]. And, we can say that we look for the maximum amplitude at the middle of
the interval I if we associate 525 to 2ns and 0 to -1ns. But, when, we change the reflector
position in the interval J , that can reflect the sgnal periodicity in the interval J , we obtain the
maximum amplitude at an other point of this interval (show figures 10-a, b, c and e).
On the other hand, a small varition of the reflector position in the interval J do not produce a
change of the maximum amplitude position in the this interval ( show figures 10-c, d, and e).
The difference between the minimum signal amplitud and the miximum of is equal to 120mV. It
is not equal to the theoritical value which is 200mV. This can be the result of the attenuation
introduced by the delay IC system and the RF generator. However RF generator has a
frequency band of 2GHz, the delay IC has a freqency band of 0.3GHz. Although before the
reference channel output, we mixture the RF generator signal (2GHz) and the delay IC signal
(0.3GHz), to obtain the reference channel output, we filter the mixtured signal with a frequencyband of 2GHz based upon the filter-amplifier which has a variable frequency between 0.5 and
2GHz. Then, this introduces some attenuation on the output signal.
So, the obtained results let us think about the signal periodicity in the intervall J . Have the output
signal really a periodicity in the interval J which provides the maximum amplitude position
change? Or, are these false results? And, we must look for the mistake.
To answer our quetions, we consider the next expriment which looks for others types of used
delay time system.
11
-
7/29/2019 SaidWorks96-98
24/36
Delay time (ns)
3.08 ns
Sweeping of 0.30 ns.
. For SI: sweeping is from 0.7 to Ins
. For S2: sweeping is from 1.7 to 2ns
Sweeping of 0.30 as.
. For SI : sweeping isfrom0.7 to Ins
. ForS2: sweeping is from1.7to 2ns
Figure 10-a: At 195.5 cm Figure 10-b: At 187 cm
1.02 1.54 2.07Delay time in ns
3.00 ns
Delay time in ns
_ Sweeping of 0.30 os.
. For SI: sweeping is from0.7 to Ins
. For S2: sweeping is from1.7to 2ns
3 08
Delay time in ns
m Sweeping of 0.30 *.
. For SI : sweeping is from0.7 to Ins
. For S2: sweeping is from1.7to 2ns
3 08
Figure 10-c: At 181 cm Figure 10-d: At 182 cm
.. Sweeping of 0.30 ns.
. For SI : sweeping b from0.7 to Ins
. For S2: sweeping is from1.7 to 2ns
figure 10-e: At 183 cm
Figures 10-a, b, c, d and e present the output variation function of the moving reflector position.
We note that in the interval J , the output has many forms. But we obtain the approximate form
at 195.5cm.
4/ Thi rd expr iment :
12
-
7/29/2019 SaidWorks96-98
25/36
In this section we deal with the delay effect on the the output. First, we treat the delay
variation when we consider the trombone system ( which permits a transmission in one direction
and a maximum variation of its length of 2*12.75 cm = 0.0255 m, which is equal to 0.85 ns of
delay time, then we consider an other delay time system which is the hp8743B( Reflection-
Transmission Test Unit). This one permit an inserted electrical length between its input and its
output of 304mm, which gives a delay time almost of 1ns. Afeter, we consider the elctrical
switching of the delay time. In the end of this section we discuss the obtained results.
a- Use of the trombone:
In this expriment the delay line system is trombone system manufactured by RFT. The RFT
system is a wave guide had a variable length. The maxumum length variation is equal to
0.0255m. This permit us to obtain a delay time of 0.85 ns when we get the maximum length
variation.
In this step, we consider a frequency band large of 1 GHz ( frequency variation is from 1GHz
to 2GHz)
We note that we get one mximum signal amplitude in the delay time variation interval ([0
2ns]).
In the first step of this expriment, we found the reflector position getting the maximum output
amplitude (which is 168.2cm), then we varied the reflector position in an interval centerated in
this position ([157 188]) in order to observ the output variation, after we studied the delay time
variation.
The incoviennent of this method consists in the the varition discontinuity (it is very difficalt to
consider a RTF length variation continously) and the use of two large cables to get the
connection ( one has a length of 90cm and the other has a 1m of length) which makes an other
delay time (almost about 6ns). So, we must add the all delay times to calculate the exact used
delay ( 6+0.85=6.85ns). An other conviennent of this system is its limit to get a delay time of one
ns.However this method presents some comveinnents, its main avantage consist in the none
variation of the signal amplitude: when we consider the transimission frequency band, we do not
make any attenuation on the considered signal, so we obtain the real amplitude of the output.
-aB1I tt Lengthvariation Lengthvariation
- S r - >(-------- J ................. |CD .
I RFT: Posaner
Figure 11: The RFT system
Figure 11 describes the used RFT system. This system has a variable length getting, in a its
maximum variation, a delay time of 0.85 ns.
Vtejarrum pc&tcn bunding lor RFT
1.5 ..2 GHz
To output multiplier
13
-
7/29/2019 SaidWorks96-98
26/36
Figure 12: Founding the reflector position getting
the maximum amplitude for RTF use.
F igure 12 presents the output variation in the interval l=[157 188cm], The position getting the
maxumum amplitude is equal to 168.2 cm. So, the reflector position variation in the interval I
gets a delay time of 1ns. Then, we associate 300 value numbers to this delay time (1ns). Based
on this association, we investigate the output variation function of the delay time variation.
Figure 13: Output variation based upon
the delay time variation using RFT
Figure 13 shows the output variation function of the delay time variation using the RFT
instrument. We should note that for this signal we have a variation between the minimum signal
position and the maximum signal position of 560 mV relatively higher than the other values
getted in the others expriments. On the other hand, for this expriment we consider a maximum
delay time variation of 0.85ns. Graphiclly, we associate150 value numbers to the delay time
(0.85ns). We observ that the maximum signal amplitude is obtained for the minimum delay time
value (0ns). On the other hand, this graph presents two pics in considered interval. This is
similiar than the theoritical results.
b- Use of hp8743B (RTTU) and the 2GHz frequency band injection:
In this expriment the delay line system is equal to a hp8743B system. So, we are interested
to inject a 2GHz frequency band using the RF generator. But, we filter the obtained mixtured
signal on the output based on the amplifier-filter (0.5 to 2.5 GHz). i
I In the first step of this expriment, we found the reflector position getting the maximum output
amplitude (which is 2.755 m), then we varied the reflector position in an interval centerated in
this position ([ 2.90 2.50m]) in order to observ the output variation, after we studied the delaytime variation.
The main rule of the hp8743B ( R TTU: Reflection-Transmission Test Unit) is to get a variation
between its input and its output of 304 mm maximumly. This can present a delay time of 1ns.
But to connect this instrument to considered system, we used the same cables as the first
expriment. So, we have an other delay time introduced by the use of these cables. This delay
time is almost equal to 6ns. Then, we obtain, in the maximum variation of the hp8743B, a delay
time of 6+1=7ns. The main advantage of this system is the 1ns delay time getting. With a
maximum variation of the hp8743, we can obtain a delay time of 1ns (304mm). So, we can
observ the band freqency elargisment and a pratical output graph similiar to the theoritical
results.
14
-
7/29/2019 SaidWorks96-98
27/36
Figure 14: The hp8743B system
Figure 14 presents the used hp8743B system.
The maximum position founding-2.25------------ ------------ ------------------------- -----------
,2 5 5 ----------------------l ---------------------,---------------------------------------------------------------------,----------------------
0 0.45 0.9 1.35 1.8 2.25 2.7 ns
Delay time (ns)
Figure 15: Founding the refloctor position
getting the maximum amplitude
Figure 15 presents the output variation in the interval l=[2.50 2.90m], The reflector position
getting the maximum amplitude is for 2.755m( distance between the antenna and the reflector).
The reflector position moving produce a delay time of 1.33ns.
We should note that the delay time is not a linear function of the value numbers because is
depended of the reflector moving velocity which is done manual.
Figure 16: Output visualisation function of
the delay time variation using a hp8743B
15
-
7/29/2019 SaidWorks96-98
28/36
Figure 16 presents the output variation when we get the reflector in the position giving the
maximum amplitude and vary the delay time using the hp8743B instrument.
However for the last expriment the varition between the minimum signal value and its maximum
value is is equal to 560mV > 200mV( theoritical value), for this expriment we obtain a value
more less than the last one( only 100mV). We can explain this by: for the last expriment, we
only considered the noise generator frequency band which is equal to 1 GHz ( variation from
1GHz to 2GHz) and we did not add any other frequency band. So, we have measured the
output signal without any attenuation. But for this expriment, we have intoduced a 2 GHz
freqency band and, we have filtered the frequency mixture in frequency band between 0.5 and
2.5 GHz. This provids the obtained signal attenuation.
c- E lectrical delay time switching:
In this section we consider the electrical switching of the delay time. Threreby, we connect
two delaies IC serialy and we remove the switched line system.
Usanti (1.3.. 10V)
O
Ucontr (1.3.. 10V)
o0.. 500 MHz 0.. 500 MHz
Mixer Mixer Amplifier
RF1.. 2 GHz
0 From reference channel mixer
Data Delay Line Device Data Delay Line Device
)IF A t A tIF RF
1.5 ..2 GHz
OTo output multiplier
Signal Divider
2 GHz
From Network Analyzer
Figure 17: E lectrical delay time switching
Figure 17 presents the associated system.
We switch from a delay time value to an other using the control voltage. The two delaies IC areconnected together to the control voltage. When, we vary the control voltage value, the delay
time value changes. So, we get a new delay time value for each control voltage variation. The
higher control voltage value, which is 10 V, gets the lower delay time value, wich is 0ns, yet the
smaller control voltage value (1.3V) gets the higher delay time value ( 2ns).
The position getting the maximum amplitude is 2.18 m ( distance between the antenna and the
reflector).
For this delay time system, we observ an elargisment of the frequency band. This result is
justified by the minimisation of used frequency band. Thereby, when, we consider a small
frequency band ( for this delay time system: the band is equal to 0.3GHz), we obtain a small
variation in the time domaine. So, for a time interval of 0.7 ns ([0 0.7ns]), we observ only one
pic which correspondents to the higher signal pic.
16
-
7/29/2019 SaidWorks96-98
29/36
Figure 18: Founding of the reflector position
getting the maximum amplitude.
Figure 18 presents the output visualisation for a moving reflector position in order to find the
position getting the maximum amplitude. This one is found for a distance between the reflector
position and the transmitter antenna of 2.18m. Figure 18 get the output variation when we
consider an interval centred in the founded position ( [2.08 2.28m]). We do not observ the
founded position in the middle because this is dependent of the moving reflector position velocity
which is done manual. On the other hand, this figure presents the output variation function of a
delay time.
Figure 18-a figure 18-b
Figure 18: Output function of the delay time variation using electrical switching
Figure 18 presents the output variation function of an electrical switching delay time. However
figure 18-a presents one measurement cycle, figure 18-b presemts three measurement cycles.
For this expriment, we note that the difference between the signal maximum value and the
signal minimum value is more less than the last expriment ( 50mV). This can be explained by
the effect of the delay IC systems. Thereby, other the 2GHz insered frequency band, each delay
IC system has a frequency band of 0.3GHz ( frequency is variable between 0 and 300MHz). So,
in the first step, we have to mixture 0.3GHz freqency band and 2GHz frequency band, after, to
mixture throughout the second mixer the obtained frequency band and a 2GHz frequency band,
and in the output, we filter the obtained signal in a 2GHz frequency band using a filter-
multiplyer. So, this introduces an attenuation to the output signal.
In the conclusion of this section, we can say that the obtained results are similiar to the
17
-
7/29/2019 SaidWorks96-98
30/36
theoritical results.
In the other hand, this section put out the difference between the different used delay time
systems and determine the output variation function of the delay time. We should note that for
a larger frequency band, we obtain a fast varition in the time domain. And the reverse.
5/ Four th expr iment :
In this expriment, we are interested to valid the obtained results in the last expriments. So, in
the first step, we look for the mechanical delay line effect. The second step consists to study the
difference between the mechanical delay line and the electrical one. The main object of this
expriment is to putout the effect of each used delay line type and to explain the obtained results.
a/ Mechanical delay line effect:
In this section we deal with the mechnical delay line device, which is the hp 8743B opt 018.
This device get a delay time of 1ns when we vary the distance between its output and its input
from 0 to 304mm.
In the first step we consider the delay time system described by figure 19.
t>xE Mixer Mixer Amplifier
2 GHz
From Network Analyzer
Figure 19 : considered delay time system.
Figure 19 describes the used delay time system. The mechanical delay line system receives itsinput from the reference channel amplifier. Its output is the frequency shifter input which its
output is the multiplier input. This mechanical delay system position permits us to get a signal
without attenuation on the output.
The frequency shifter get a noise signal of a 2 GHz frequency band. Its object is to shift the
input generator frequency (11 GHz) to an output frequency of 2GHz. The delay time is shifted
manually between 0 to 4ns when we consider four cases: 1- third line (L3 = 60 cm) insering, 2-
second line (L2 = 40 cm) insering, 3- first line (L, = 20 cm) insering, and 4- any line is
considered.
i E ither the delay time introduction into the chosen lines, we vary the mechancal delay system
from the minimum position to the maximum position for each case.
Also, this permits an Interval delay time variation of 4 ns ( from 0 to 4 ns).
18
-
7/29/2019 SaidWorks96-98
31/36
Choosing line via PC
J 1.. 2 GHz
8 0 -----
Mixer Amplifier
IFIF
1.5.. 2 GHz
Mechanical delay timesystem: hp8743B
Signal Divider
2 GHz
Vout
12 GHz 12 GHz
Iswitch lines present diffirent distances
2 GHz
2 GHz
Oscillator
Figure 23: MDS inside the mixers
in the first case we would to look for the getting results when we consider the delay time
descibed by the figures 23 and 24. In the first case, the mechanical delay time system is putted
before the frequency shifter system, yet in the second one, it is putted between the mixers. This
permit us to getout the difference between the mechanical delay time system in order to study
the frequency shift effect. Also, for this expriment we find one maximum position, then we try to
change the mechanical delay system postion and looking for the results.
In the first step, we look for the position getting the maximum signal amplitude. This is done by
the moving reflector position. In the second step we keep the reflector at the founded position,
then we try to vary the mechanical delay time form the largest value (30.4cm) to the shortest
i one (0cm) for each switched line.
Wttvxrt attenuator
Figure 24: The Mechanical Delay System Position Study.
Figure 24 presents the obtained results for each considered mechanical delay system position.
We should note that without using the frequency shift system, we can get some pratical results
similiar thant the theoritical ones. In the other hand, we should note that for this case, we obtain
the maximum variation of the signal, between the minimum value and the maximum one, is
450mV.
Yet, when we introduce the shift frequency system, we get some attenuation for this variation
21
-
7/29/2019 SaidWorks96-98
32/36
which becomes of 250 mV.
Hovewer there is some similiarity in the amplitude between the curves correspondent to the
mechanical delay system before the frequency shifter and between the mixers, we should note
that for the first postion, we get an acceptable curve which presents some simlalirity with the
theoritical results. But for the second position, we get a curve which prensents two miximas at
the maximum position neither than one as the last curves. This result let us think about the
effect of the mixers. One result can explain what we get for the last position that for this case,
the system generates a multifrequency but not a monofrequency as the first position. Not only
this, but also, that is at this position we generate a high frequency and an either intoduced
phase.
These results let us look for the frequency shift effect proceessing.
Figure 25: introduced mixer effect for the first position.
Figure 26: introduced mixer effect for the second position.
In this expriment, we would to look for the mixer effects. So, we consider an other mechanical
delay device which is the R FT device and we try to find introduce phase effect. This permit us
to chek the additional phase. Thereby, we know that the phase phi is equal to 2*pi*f*t, where f
is the frequency (2GHz) and t is the time delay. Also, the delay time is function of the lengthvariation. So, the additional phase is function of the length variation. We know that a length
variation of the RFT of 30cm gets a delay time of 1ns. Then, for each length variation, we have
a phase value.
For this expriment, we should note that we get a symetry on the 90 for the two positions. But
for the first one, we note that there is no sweeping when we consider the line getting the
maximum signal amplitude. However, for the first position we get two maximums, for the second
one we get four ones. This result let us cons ider that the frequency shifter generates high
frequency.
22
-
7/29/2019 SaidWorks96-98
33/36
Figure 27-a. Figure 27-b
Figure 27-c
Figure 27 a,b,c : Phase variation effect.
We note for the phase variation, we obtain different output behaviours. For a small variation, 15
figure 27-a, the curves appear semiliar. But with a great variation, 30 figure 27-b, we get
different curves have some semetry. The 90 presents the semetry point, figure 27-b. We note
that when we consider a phase variation on the left, figure 27-a, and on the right, figure 27-c, of
this point we have the same curves.
This result let us consider a low frequency filter and treat the different mechanical delay and the
switched line systems: all outside, all inside and the mechanical delay system Inside but the
switchs outside. v"
Figure 28: MDS inside and switchs outside.
23
-
7/29/2019 SaidWorks96-98
34/36
Figure 29: MDS all Inside.
The main object of this exprimet is to localisate the high frequency.
Figure 30: Obtained curves
j We should note that there is any great difference for the considered positions. On the other
hand, we can say that we have a small symetry. Yet, the high introduced frequency is not
function of the treated positions.
An other kind of measurment of the higher frequency consist to the measurment with an
absorber. This expriment treats the output variation when we put an absobder in order to
soustract the reflexion phenoma. We note that we get an amplitude variation of 0.02mV. The
based object of these measurment is investigate the higher sweep when we switch the lines.
Figure 31: Measurments with an absorber.
24
-
7/29/2019 SaidWorks96-98
35/36
We should note that there some little amplitude variations (0.050 mV). This can introduce an
effect on the output signal. This step gives an idea about the correlator effect. Also, theoritically,
when we put an absorber front of the transmitter and/or the receiver, we are sure that we obtain
a noise signal has no sense. But, the obtained curves for this step present some interprated
results. On the other hand, we should note that the curves do not start at the same point. Either,
the two curves have not the same phase. This let us think that the mixers introduce an
additionnal phase to the considered signal. So, when we put the mechanical delay systembefore and when we put it between the mixers, we get two curves have almost the behaviour
but have not the same started point neither the same phase.
An other step in this expriment consists to study the chosen started line. That means, we
compare the results when we start with the shortest line and the others when we start with the
longest one.
We note that we have a symetry. Also, when we start the longest line we note that the maximum
amplitude is on the right. Yet, when we start the shortest, the maximum amplitude is on the left.
Figure 32: comparaision between the started lines.
We should note that there a symetry at the middle of the x-axe. But there is some difference in
the behaviour of the two curves: the minimum signal amplitude of the first one is smaller than
the minimum of the second one. The sweeping is more important for the first one than the
second one.
Neither the first one nie the second present a symetry on the left and on the right of the their
maximum signal.
In the end of this expriment, we start to look of the difference between the delay time effect
l introduced by the moving of the reflector position and the same introduced by the machanical
delay system.
Figure 33: Reflector position variation.
25
-
7/29/2019 SaidWorks96-98
36/36
Figure 33 presents the obtained curve when we consider the reflector position variation with a
30cm on the left and 30cm on the right of the founded position getting the maximum amplitude
of the output. This variation presents a delay time of 4 ns. We note that we no symetry. We
have a greatest pic in the center and two other smaller pics which have not the same
amplitudes. This phenoma presents an other way of the future research in this field.
Conc lus ion and perspect ives :
In this trainning, we were interested to study the correlation between a measurment channel
and a reference channel. The first channel characterise a real transmission-reflection phenoma.
In which, mainly we find: a noise signal generator (a noise multifrequency signals of 11 GHz ), a
transmitter antenna, a variable position reflector, and a receiver antenna. The second channel
presents the theoritical transmission-reflection phenoma description. In this channel, we were
interested to vary the delay time based upon different types of delay line devices. In the output,
we have geted a multiplier which realised the correlation function between these two channels.
The measurment controls were generated by developed Pascal programs into an interface card
(meilhaus.300) which mainly contains A/D and D/A converters, analog channels, multiplier,
timer, digital I/O, and registers.The object of the developed programs is to generate the
measurments task (data transimission-reception, switching lines,..), to store the input data, and
to display the results graphically.
The object of this training is:
- first, to introduce the PC as a measurment instrument,
- second, to valid the theoritical resulats for a moving antenna function of the introduced
delay time,
- third, to putout the diffrence between the used delay line devices,
- fourth, to investigate the introduced delay time effect function of the frequency,
- fifth, to valid the used delay line devices and to specify the characteristics of the needed
delay line devices which permit the best presentation of the real transmission-reflection
phenoma.
Several perspectives of this training are distinguished:
i- difference investigation between the output behaviour when we vary the antenna position and
the same one when we keep the reflector at the founded position, getting the maximum signal
amplitude, and we consider the delay time variation using a delay line device,
li- difference study of the different considered delay time system position; outside and inside the
frequency shifter system,
iii- the frequency shifter system effect,
iv- the considered system modelling and the real application of such research.