
Régulateur de position analogique Remplace: 03.04 Type VT ... · AVPC-V libre Valeur réelle ou...
12
Régulateur de position analogique Type VT-MACAS-... Série 1X RF 30050/07.12 Remplace: 03.04 Table des matières Contenu Page Caractéristiques 1 Codification 2 Platine avant 3 Schéma fonctionnel avec affectation des broches 4 Caractéristiques techniques 5 Fonctionnement 6 Raccordement électrique 7 et 8 Compensation et mise en service 9 Réactions d'erreur 10 Compensation du régulateur de vitesse 11 Encombrement 12 Directives d'étude / de maintenance / Informations supplémentaires 12 Caractéristiques – Convient pour le pilotage de distributeurs avec électronique intégrée pour la régulation de la position et de la vitesse – Forme: Module pour l'encliquetage sur des profilés support – Entrée de validation – Détection de rupture de câble pour câble de valeurs réelles – Interfaces résistantes aux court-circuits – Points d'essai sur la platine avant – Saut de compensation désactivable – Position: Réglage PT1 – Régulation de la vitesse possible en combinaison avec un tachymètre (instrument de mesure de la vitesse): Réglage PI – Adaptation des surfaces du vérin Avis: La photo représente une configuration exemplaire. Le produit expédié diffère de l'image. 1/12
Transcript of Régulateur de position analogique Remplace: 03.04 Type VT ... · AVPC-V libre Valeur réelle ou...
Régulateur de position analogique
Type VT-MACAS-...
Série 1X
RF 30050/07.12 Remplace: 03.04
Table des matièresContenu PageCaractéristiques 1Codification 2Platine avant 3Schéma fonctionnel avec affectation des broches 4Caractéristiques techniques 5Fonctionnement 6Raccordement électrique 7 et 8Compensation et mise en service 9Réactions d'erreur 10Compensation du régulateur de vitesse 11Encombrement 12Directives d'étude / de maintenance / Informations supplémentaires 12
Caractéristiques– Convient pour le pilotage de distributeurs avec électronique
intégrée pour la régulation de la position et de la vitesse– Forme: Module pour l'encliquetage sur des profilés support– Entrée de validation– Détection de rupture de câble pour câble de valeurs réelles– Interfaces résistantes aux court-circuits– Points d'essai sur la platine avant– Saut de compensation désactivable– Position: Réglage PT1– Régulation de la vitesse possible en combinaison avec un
tachymètre (instrument de mesure de la vitesse): Réglage PI– Adaptation des surfaces du vérin
Avis:La photo représente une configuration exemplaire.Le produit expédié diffère de l'image.
1/12
2/12 Bosch Rexroth AG Hydraulics VT-MACAS-... RF 30050/07.12
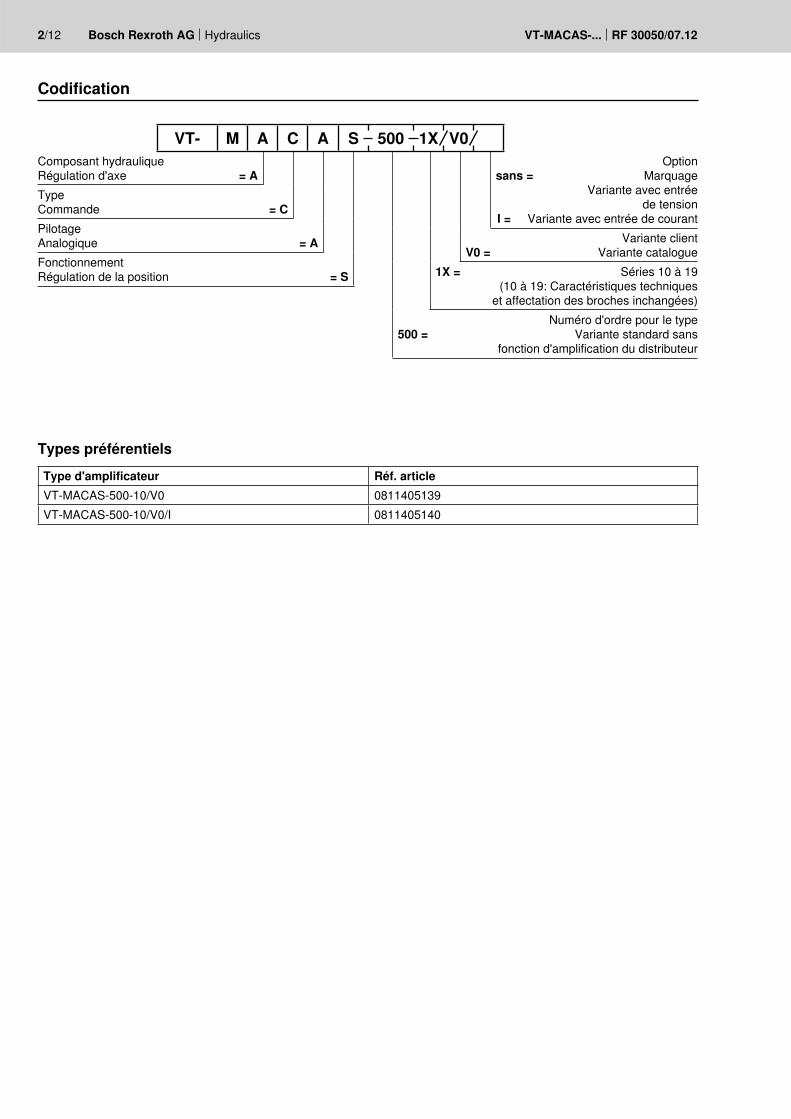
Codification
Types préférentielsType d'amplificateur Réf. articleVT-MACAS-500-10/V0 0811405139VT-MACAS-500-10/V0/I 0811405140
Composant hydraulique Régulation d'axe = ATypeCommande = CPilotageAnalogique = AFonctionnementRégulation de la position = S
Optionsans = Marquage
Variante avec entrée de tension
I = Variante avec entrée de courantVariante client
V0 = Variante catalogue1X = Séries 10 à 19
(10 à 19: Caractéristiques techniques et affectation des broches inchangées)
Numéro d'ordre pour le type500 = Variante standard sans
fonction d'amplification du distributeur
VT- M A C A S 500 1X V0

ON
enab
ling
mes
sage
–IN p
osit
ion
gain
ram
p ti
me
zero fe
edb.
+ –
zero
valv
e
+
+
–
–
13 5
137
91115
U
supp
ly 2
4 V=
0V
I4.
..20
mA
U 0V
0V
inpu
t
MAC
AS
TP TP 0
V
sign
al
valv
esi
gnal
sign
alfe
edb.
10 11 12 138 97531
V
642
+U
B
KI KT1
KP
10 V
/ 1
0 V
++
10
V
+
BA
A/B
off
0.1.
..1 s
1...1
0 s
135
137
911 15
135
137
911 15
Sinp.
0.5%
1% off
-0-
act.
pos.
IN
⨍⨍
10 V
/ 1
0 V
++
Hydraulics Bosch Rexroth AGRF 30050/07.12 VT-MACAS-... 3/12
Platine avant
Valid
atio
nTP
Val
eur d
e co
nsig
ne
Erre
ur U
Vale
ur ré
elle
Rupt
ure
de c
âble
Val
eur r
éelle
Com
pens
atio
n du
poi
nt z
éro
Vale
ur ré
elle
Mes
sage
à la
pos
ition
Com
pens
atio
n Am
plific
atio
n Va
leur
réel
le
Fenê
tre d
e po
sitio
n
Adap
tatio
n de
s su
rface
s Vé
rin
Saut
de
com
pens
atio
n M
arch
e/AR
RÊT
Plag
es d
e te
mps
de
ram
pe
Poin
t zér
o di
strib
uteu
r
Accé
lére
r
Com
mut
atio
n R
égul
ateu
r de
vite
sse
/ pos
ition
Décé
lére
r
Com
pens
atio
n R
égul
ateu
r P
Com
pens
atio
n Ré
gula
teur
I (ré
gula
tion
de la
vite
sse)
ou
régu
late
ur K
T1 (r
égul
atio
n de
la p
ositi
on)

v zur
.v v
or
v ext
.v r
etr.
ON
–>
+15
V
+–1
5 V
15 V
24 V
U
100 ms...1 s1 s...10 s
+–+ –
+–
PT 1
S/V
4...2
0 m
A
0...
10
V
ON
/OFF
(1)
0...1
0 V
+ –
4...2
0 m
A
0...
10
V
0...1
0 V
0 V
+ –
4...2
0 m
A
0...
10
V
+–0.5%
+–1.0%
(2)
(3)
(4)
(10) (9)
(8)
0 V
PI
1–>1
++
(5)
UI
(7)
–+++
+–
+–(6
)
(12)
(11)
–
UB
⨍⨍
+24
V
0 V
+24
V
0 V
4/12 Bosch Rexroth AG Hydraulics VT-MACAS-... RF 30050/07.12
Schéma fonctionnel avec affectation des broches
Sign
al d
u di
strib
uteu
r
et/o
u
et/o
u
Alim
enta
tion
Vale
ur d
e co
nsig
ne
Vale
ur
réel
le
Valid
atio
n
à la
pos
ition
Posi
tion
ou d
écél
érer
ou a
ccél
érer Gén
érat
eur d
e ra
mpe
Arrêt
ouou
Posi
tion
Fenê
tre
Saut
de
com
-pe
nsat
ion
Adap
tatio
n de
s su
rface
sVe
rroui
ller l
e ré
gula
teur
Erre
ur
Vite
sse
uniq
uem
ent e
n ca
s de
co
nsig
ne 0
...±1
0 V
Rep
rise
de la
va
leur
réel
le
Vale
ur d
e co
nsig
ne
Vale
ur ré
elle
Rup
ture
de
câbl
e
Poin
t zér
oAm
plifi
-ca
tion
Poin
t zér
oD
istri
bute
urPo
ids
"À L
A PO
S"(c
f. Ca
ract
érist
ique
s te
chni
ques
)
Verro
uille
r le
sign
al d
u di
strib
uteu
r
Hydraulics Bosch Rexroth AGRF 30050/07.12 VT-MACAS-... 5/12
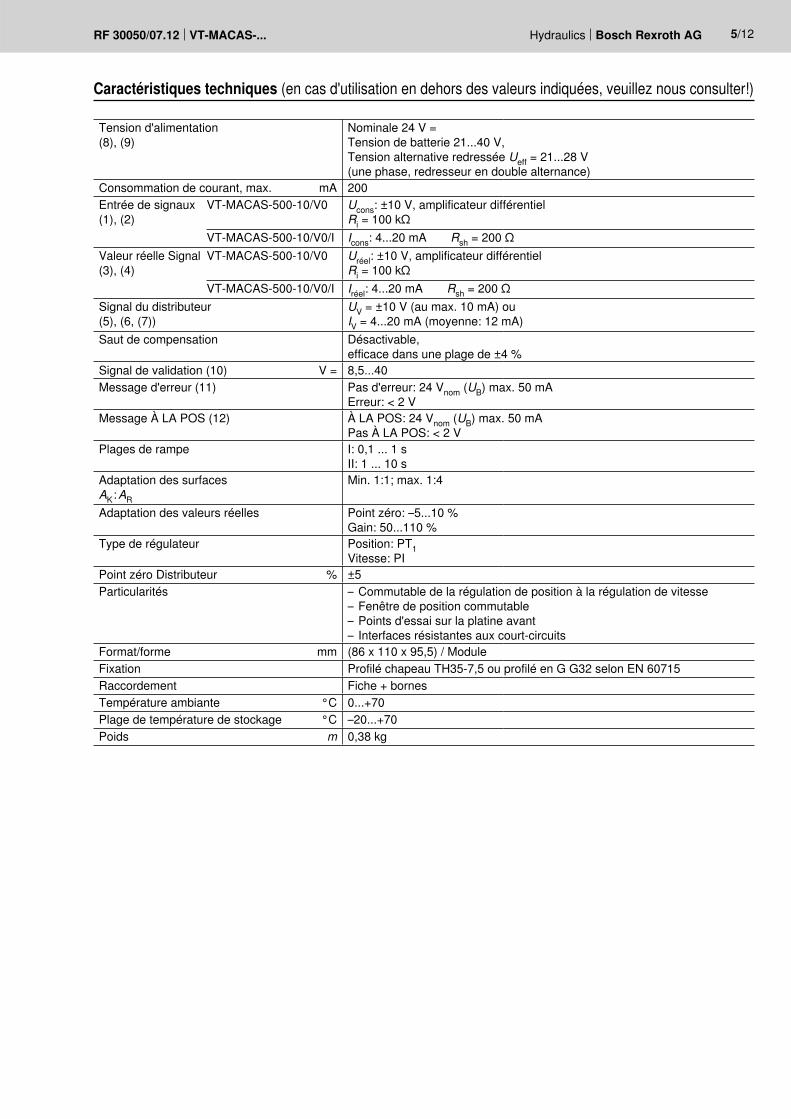
Caractéristiques techniques (en cas d'utilisation en dehors des valeurs indiquées, veuillez nous consulter!)
Tension d'alimentation (8), (9)
Nominale 24 V =Tension de batterie 21...40 V, Tension alternative redressée Ueff = 21...28 V (une phase, redresseur en double alternance)
Consommation de courant, max. mA 200Entrée de signaux (1), (2)
VT-MACAS-500-10/V0 Ucons: ±10 V, amplificateur différentielRi = 100 kΩ
VT-MACAS-500-10/V0/I Icons: 4...20 mA Rsh = 200 ΩValeur réelle Signal (3), (4)
VT-MACAS-500-10/V0 Uréel: ±10 V, amplificateur différentielRi = 100 kΩ
VT-MACAS-500-10/V0/I Iréel: 4...20 mA Rsh = 200 ΩSignal du distributeur(5), (6, (7))
UV = ±10 V (au max. 10 mA) ouIV = 4...20 mA (moyenne: 12 mA)
Saut de compensation Désactivable, efficace dans une plage de ±4 %
Signal de validation (10) V = 8,5...40 Message d'erreur (11) Pas d'erreur: 24 Vnom (UB) max. 50 mA
Erreur: < 2 VMessage À LA POS (12) À LA POS: 24 Vnom (UB) max. 50 mA
Pas À LA POS: < 2 VPlages de rampe I: 0,1 ... 1 s
II: 1 ... 10 sAdaptation des surfacesAK : AR
Min. 1:1; max. 1:4
Adaptation des valeurs réelles Point zéro: –5...10 %Gain: 50...110 %
Type de régulateur Position: PT1Vitesse: PI
Point zéro Distributeur % ±5Particularités – Commutable de la régulation de position à la régulation de vitesse
– Fenêtre de position commutable– Points d'essai sur la platine avant– Interfaces résistantes aux court-circuits
Format/forme mm (86 x 110 x 95,5) / ModuleFixation Profilé chapeau TH35-7,5 ou profilé en G G32 selon EN 60715Raccordement Fiche + bornesTempérature ambiante °C 0...+70Plage de température de stockage °C –20...+70Poids m 0,38 kg
G
= +
24 V
DC
UB
Σ
+24
V
0 V
+24
V
0 V
+24
V
0 V
+–0...10 V/ 10 V4...20 mA
+–0...10 V/ 10 V4...20 mA
G Σ
= +
24 V
DC
UB
+24
V
0 V
+24
V
0 V
+24
V
0 V
+–0...10 V/ 10 V+
–
4...20 mA
+–0...10 V/ 10 V4...20 mA
6/12 Bosch Rexroth AG Hydraulics VT-MACAS-... RF 30050/07.12
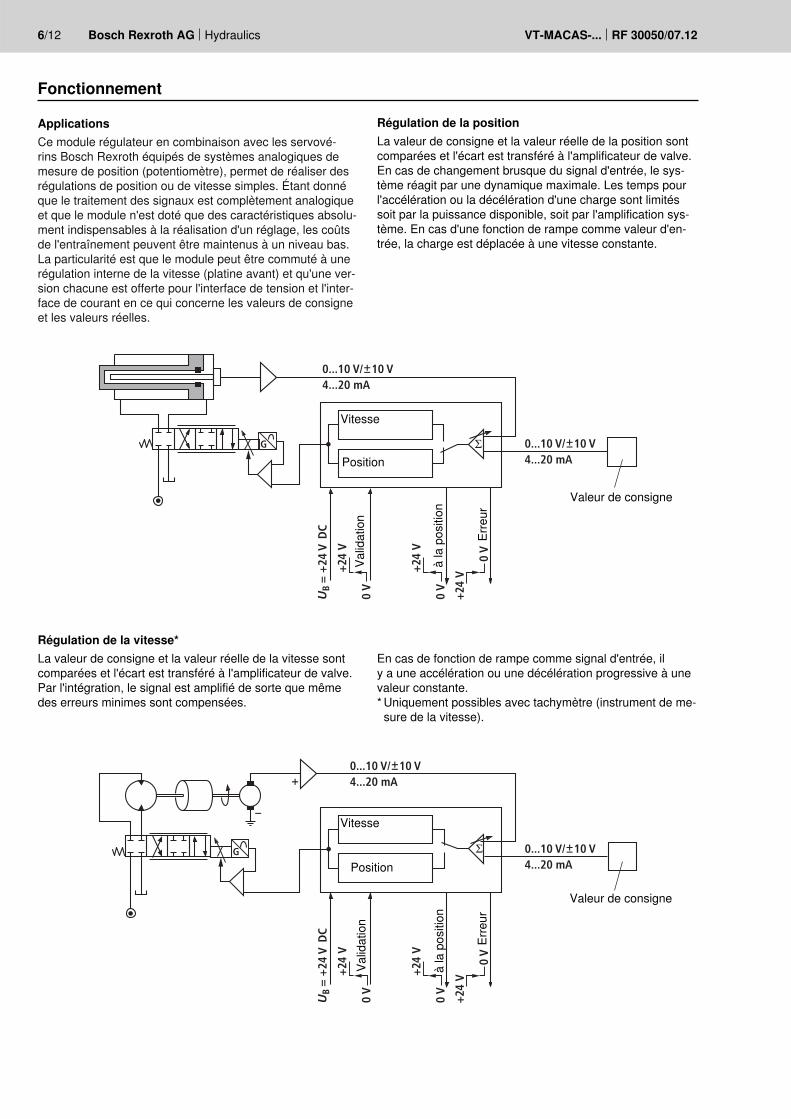
Fonctionnement
ApplicationsCe module régulateur en combinaison avec les servové-rins Bosch Rexroth équipés de systèmes analogiques de mesure de position (potentiomètre), permet de réaliser des régulations de position ou de vitesse simples. Étant donné que le traitement des signaux est complètement analogique et que le module n'est doté que des caractéristiques absolu-ment indispensables à la réalisation d'un réglage, les coûts de l'entraînement peuvent être maintenus à un niveau bas. La particularité est que le module peut être commuté à une régulation interne de la vitesse (platine avant) et qu'une ver-sion chacune est offerte pour l'interface de tension et l'inter-face de courant en ce qui concerne les valeurs de consigne et les valeurs réelles.
Régulation de la positionLa valeur de consigne et la valeur réelle de la position sont comparées et l'écart est transféré à l'amplificateur de valve. En cas de changement brusque du signal d'entrée, le sys-tème réagit par une dynamique maximale. Les temps pour l'accélération ou la décélération d'une charge sont limités soit par la puissance disponible, soit par l'amplification sys-tème. En cas d'une fonction de rampe comme valeur d'en-trée, la charge est déplacée à une vitesse constante.
Régulation de la vitesse*La valeur de consigne et la valeur réelle de la vitesse sont comparées et l'écart est transféré à l'amplificateur de valve. Par l'intégration, le signal est amplifié de sorte que même des erreurs minimes sont compensées.
En cas de fonction de rampe comme signal d'entrée, il y a une accélération ou une décélération progressive à une valeur constante.* Uniquement possibles avec tachymètre (instrument de me-sure de la vitesse).
Vitesse
Valeur de consigne
Position
Position
Valeur de consigne
Valid
atio
nVa
lidat
ion
à la
pos
ition
à la
pos
ition
Erre
urEr
reur
Vitesse

ON
enablingmessage
–IN position
gain
1312111098765432
v
x
1
0 V
0 V
24 V DC
24 V DC
8,5...40 V DC
0 V
D* D*
*
0 V
24 V
24 V
24 V
0 V
24 V
0 VA
B
C
D
E
0 V0 V
+10 V
–10 V
ramp time
zerofeedb.
+–
zerovalve +
+
–
–
1 3513
7911
15
U
supply 24 V=
I4...20 mA
U
0V
inputsignal
valvesignal
signalfeedb.
10111213
89
7
5
3
1
V
6
4
2
+UB
Usoll
KI
KT1
KP
10 V +
BA
A/B
off0.1...1 s1...10 s
135 137 9 11
15
135 137 9 11
15
S
inp.
0.5% 1%
off-0-
act.pos.IN
⨍⨍
10 V
/ 1
0 V
+
24 V DC nom.
0V
0V10 V/ 10 V + +
10 V/ 10 V + +
Hydraulics Bosch Rexroth AGRF 30050/07.12 VT-MACAS-... 7/12
Raccordement électrique
Schéma de câblageAVPC-V
libre
Valeur réelle
ou
D*-Signal du distributeur avec interface de tension ou de courant

4...20 mA
ON
enablingmessage
–IN position
gain
1312111098765432
mA
x
1
24 V DC
24 V DC
8,5...40 V DC
0 V
D* D*
*
0 V
24 V
24 V
24 V
0 V
24 V
0 VA
B
C
D
E
0 V
ramp time
zerofeedb.
+–
zerovalve +
+
–
–
1 3513
7911
15
U
supply 24 V=
I4...20 mA
U
0V
inputsignal
valvesignal
signalfeedb.
10111213
89
7
5
3
1
V
6
4
2
+UB
Isoll
Iset
Iconst.
KI
KT1
KP
10 V +
BA
A/B
off0.1...1 s1...10 s
135 137 9 11
15
135 137 9 11
15
S
inp.
0.5% 1%
off-0-
act.pos.IN
⨍⨍
4...20 mA
4...20 mA
24 V DC
4...20 mA
nom.
8/12 Bosch Rexroth AG Hydraulics VT-MACAS-... RF 30050/07.12
Schéma de câblageAVPC-mA
D*-Signal du distributeur avec interface de tension ou de courant
libre
Valeur réelle
Raccordement électrique

Hydraulics Bosch Rexroth AGRF 30050/07.12 VT-MACAS-... 9/12
Compensation et mise en service
La compensation complète du module se réalise sur la pla-tine avant et à la pression de service.
Vérification ducâblage (page 6)
Réglages du mode
Préréglage du régulateur
PréréglageAdaptation des surfaces
Tension d'alimentation MARCHEValidation MARCHE (Cl. 10)
CompensationDétecteur de valeur réelle
CompensationSignal du distributeur
Compensation du régulateur
Compensation des rampes
Réglage finAdaptation des surfaces
– Régulateur de vitesse/position– Saut de compensation MARCHE / ARRÊT– Fenêtre de position 0,5 % / 1 %– Rampe MARCHE / ARRÊT
– KP = 1 en cas de régulation de la position– KI = 2 / KTI = 1 en cas de régulation de la vitesse (KI = 1 interdit)
– Sextuple inverseur "A / B"; en fonction du rapport des surfaces du vérin
– La DEL "ON" s'allume– Les DEL " U" et " ʃʃ" sont éteintes
→ sinon, voir Réactions d’erreur à la page 10
– Définition de la consigne minimum→ à l'aide du potentiomètre "zero feedb." compensation de la valeur réelle à 0 V
(PE "act." contre PE "⊥")– Définition de la consigne maximum (p. ex. +10 V; 20 mA)
→ à l'aide du potentiomètre "gain" compensation de la valeur réelle à 10 V(PE "act." contre PE "⊥")
AvisSur la borne de raccordement à 13 pôles du module, il ne faut raccorder aucun instrument de mesure pour effectuer une mesure de la tension réelle ou de la ten-sion de consigne.– Validation ARRÊT– Définition de la valeur de consigne pour la position zéro du distributeur
→ à l'aide du potentiomètre "zero valve" compensation du signal du distributeur(p. ex. arrêt du vérin; 0 V sur le distributeur)
– Augmentation progressive de l'action partielle KP, ensuite– Augmentation progressive de l'action partielle KTI /KI– Aide à la compensation, page 10
– Si une fonction de rampe est nécessaire:Rampe MARCHE → présélection de la plage de temps
– Définition de l'échelon de consigne (p. ex. 20 %...60 %)Réglage des rampes de vitesse (position) ou des rampes d'accélération (vitesse) à l'aide du potentiomètre
– Comparaison de l'évolution dans le temps s(t) ou v(t) des deux sens de déplacement à l'aide d'un oscilloscope→ compenser les différences "A / B" à l'aide d'un commutateur Hexcode
10/12 Bosch Rexroth AG Hydraulics VT-MACAS-... RF 30050/07.12
Réactions d'erreur
U: Déclenchement en cas de dépassement négatif de la tension d'alimentation interne⇒ Signal de distributeur 0 V ou 12 mA;
⇒ Message DEL " U" et (11)Cause possible: Tension d'alimentation externe trop faible (< 16 V) ou erreur interne (→ réparation). ʃʃ: Déclenchement en cas de rupture des câbles de
valeur réelle et/ou des câbles de valeur de consigne⇒ Signal du distributeur 0 V ou 12 mA;
⇒ Message DEL "ʃʃ" et (9)
L'erreur est enregistrée.Suppression de l'erreur par la désactivation et la réactiva-tion du signal de validation ou de la tension d'alimentation.
t
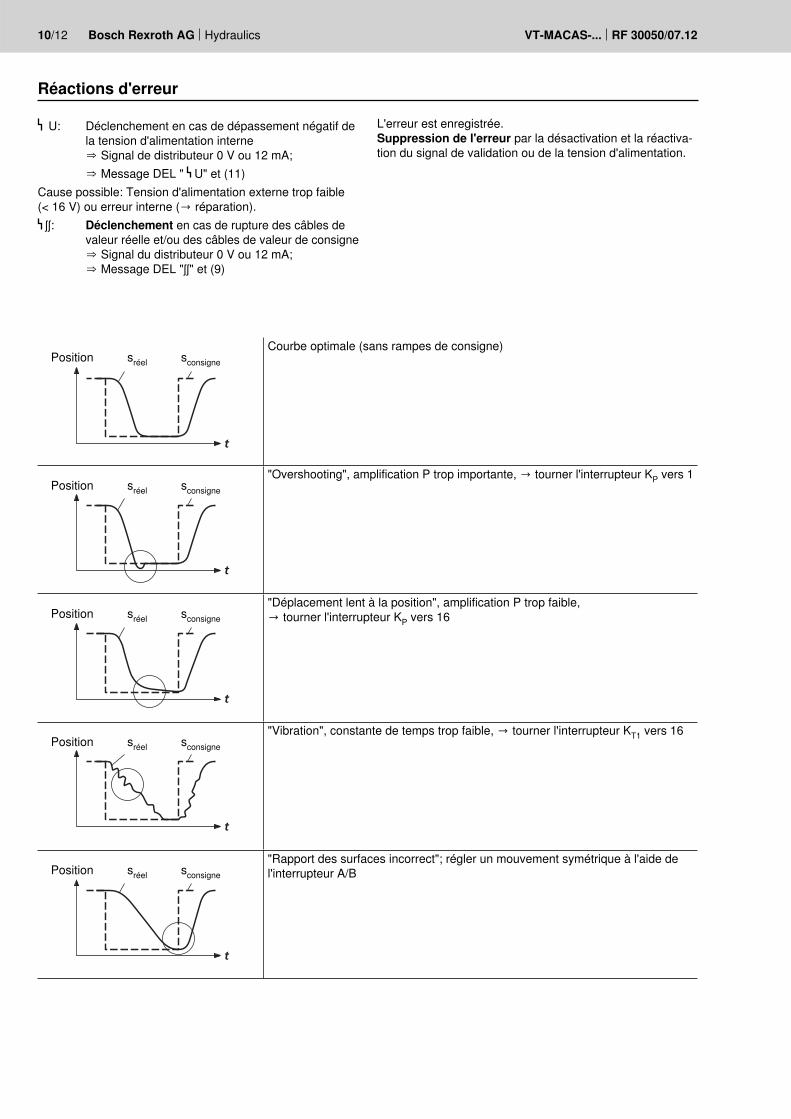
Courbe optimale (sans rampes de consigne)
t
"Overshooting", amplification P trop importante, → tourner l'interrupteur KP vers 1
t
"Déplacement lent à la position", amplification P trop faible, → tourner l'interrupteur KP vers 16
t
"Vibration", constante de temps trop faible, → tourner l'interrupteur KT1 vers 16
t
"Rapport des surfaces incorrect"; régler un mouvement symétrique à l'aide de l'interrupteur A/B
Position
Position
Position
Position
Position
sréel
sréel
sréel
sréel
sréel
sconsigne
sconsigne
sconsigne
sconsigne
sconsigne

Hydraulics Bosch Rexroth AGRF 30050/07.12 VT-MACAS-... 11/12
Compensation du régulateur de vitesse
V
Courbe optimale (sans rampes de consigne)
Amplification P trop faible, → tourner l'interrupteur KP vers 16
Amplification P trop importante, → tourner l'interrupteur KP vers 1
Amplification P correcte, mais erreur de poursuite trop importante, ré-duire l'erreur de poursuite à l'aide du régulateur I → tourner l'interrup-teur KI jusqu'à ce que l'erreur de poursuite min. soit atteinte
vréel
vréel
vréel
vréel
vconsigne
vconsigne
vconsigne
vconsigne
Minimum
Erreur de poursuite
erreur de poursuite
10 11 12 138 97531 642
ON
74
21,5
110
7,5
5,5
3836
86
110
UB
98
12/12 Bosch Rexroth AG Hydraulics VT-MACAS-... RF 30050/07.12
Bosch Rexroth AGHydraulicsZum Eisengießer 197816 Lohr am Main, GermanyPhone +49 (0) 93 52 / [email protected]
© Tous droits réservés par Bosch Rexroth AG, y compris en cas de dépôt d’une demande de droit de propriété industrielle. Tout pouvoir de disposition, tel que droit de reproduction et de transfert, détenu par Bosch Rexroth.Les indications données servent exclusivement à la description du produit. Il ne peut être déduit de nos indications aucune déclaration quant aux propriétés précises ou à l’adéquation du produit en vue d’une application précise. Ces indications ne dispensent pas l’utilisateur d’une appréciation et d’une vérification personnelle. Il convient de tenir compte du fait que nos produits sont soumis à un processus naturel d’usure et de vieillissement.
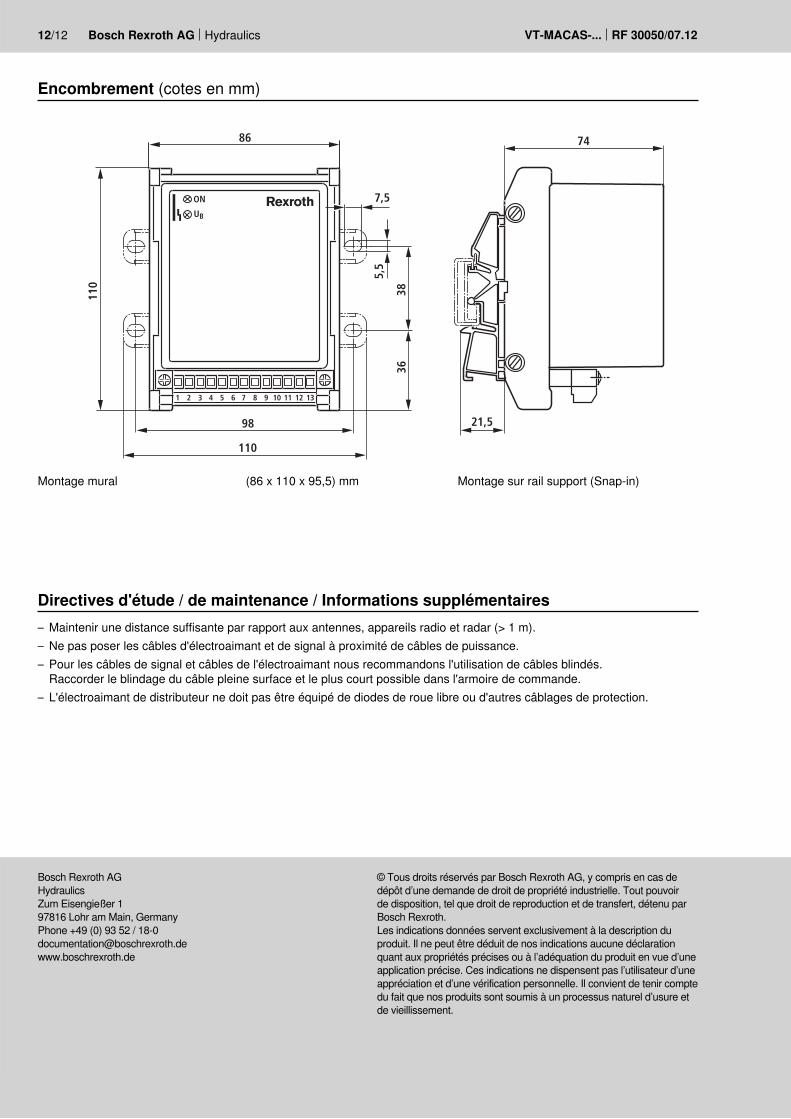
Encombrement (cotes en mm)
Montage mural (86 x 110 x 95,5) mm Montage sur rail support (Snap-in)
Directives d'étude / de maintenance / Informations supplémentaires– Maintenir une distance suffisante par rapport aux antennes, appareils radio et radar (> 1 m).– Ne pas poser les câbles d'électroaimant et de signal à proximité de câbles de puissance.– Pour les câbles de signal et câbles de l'électroaimant nous recommandons l'utilisation de câbles blindés.
Raccorder le blindage du câble pleine surface et le plus court possible dans l'armoire de commande.– L'électroaimant de distributeur ne doit pas être équipé de diodes de roue libre ou d'autres câblages de protection.


















