
Reducteur Text

of 73
-
Upload
ionitza-valentina -
Category
Documents
-
view
173 -
download
1
Transcript of Reducteur Text
Mthodologie de calcul et de conception dun REDUCTEUR dengrenage cylindrique ou coniqueGINA STOICA ( Universit POLITEHNICA de Bucarest ) BERNARD LEDUC (Universit Libre de Bruxelles )
2009
A mon professeur,Cet aide mmoire est le fruit dune collaboration que jai ralise avec le professeur Bernard LEDUC de lUniversit LIBRE de Bruxelles et qui sest droul pendant plusieurs mois. Le livre sur lequel sest appuy notre travail a le titre Transmisii mecanice cu reductoare intr-o treapta dont les auteurs sont Mihai MUSAT et Gina STOICA et qui a connu des adaptations et modifications successives depuis 1998, lanne de sa publication. Le public immdiat auquel sadresse cet aide mmoire est constitu par les tudiants de lUniversit LIBRE de Bruxelles et ceux de lUniversit POLITEHNICA de Bucarest, spcialiss en Gnie Mcanique. Tout d'abord, je tiens remercier mon ancien collgue, M. Mihai MUSAT, qui a reprsent pour moi un modle de professeur et qui m'a donn l'opportunit de dcouvrir le domaine des lments des machines. Cest toujours grce lui que jai russi dcouvrir les mthodes pdagogiques et la passion pour ce mtier important celui de professeur ! Merci, Professeur, d'avoir pris le temps de rpondre mes nombreuses questions. Je suis galement reconnaissante M. Mihai MUSAT de s'tre toujours souci de ma comprhension quant aux problmes abords. Un grand merci encore M. Mihai MUSAT pour sa gentillesse, sa disponibilit, son professionnalisme, son soutien pendant toutes les annes de collaboration. Je ddie ce travail M. Mihai MUSAT. Gina Florica STOICA
Introduction ................................................................................................................. SCHEMAS CINEMATIQUES DES TRANSMISSIONS MECANIQUES ........... 1. Calcul cinematique et energetique ......................................................................... 1.1. Choix du moteur electrique ........................................................................ 1.2. Calcul cinematique ..................................................................................... 1.2.1 Determination des rapports de transmission ................................ 1.2.2. Calcul de la vitesse de rotation des arbres .................................. 1.3. Calcul energetique ...................................................................................... 1.3.1. Calcul des puissances transmises par les arbres .......................... 1.3.2. Calcul des moments de torsion transmis par les arbres ............. 2. Dimensionnement preliminaire des arbres ........................................................... 3. Calcul de la transmission par courroies trapezoidales ....................................... 4. Dimensionnement preliminaire des engrenages .................................................. 4.1. Choix des materiaux pour les roues dentes et des traitements thermiques ou thermochimiques .............................................................. 4.2. Dimensionnement preliminaire des engrenages ......................................... 4.2.1. Dimensionnement preliminaire dun engrenage cylindrique exterieur a denture hlicodale .................................................. 4.2.2. Pre-dimensionnement dun engrenage conique a denture droite 5. Elements geometriques des roues dentes ............................................................ 5.1. Elements geometriques des roues cylindriques a denture helicodale . 5.2. Elements geometriques des roues dentees coniques a denture droite pour un engrenage orthogonal ( = 90 o ) ............................................................ 6. Calcul des forces dans les engrenages ................................................................... 6.1. Forces dans un engrenage cylindrique helicoidal ...................................... 6.2. Forces dans un engrenage conique a denture droite ................................... 7. Verifications des engrenages .................................................................................. 7.1. Verification des conditions de taillage et dengrenement .......................... 7.1.1. Verification du sous-taillage des dents ....................................... 7.1.2. Verification de la continuite de lengrenement ........................... 7.1.3. Verification des interferences des dents ...................................... 7.1.4. Verification du jeu a la tete des dents ......................................... 7.1.5. Verification de lpaisseur des dents sur le cercle de tte ........... 7.2 Verification de la resistance de la denture des roues dentes .....................
7.2.1. Verification de la sollicitation au pied de la dent ........................ 7.2.1.1. Cas des engrenages cylindriques denture Helicoidale . 7.2.1.2. Cas des engrenages coniques a denture droite ............. 7.2.2.Verification de la resistance a la pression superficielle (verification au pitting) ................................................................ 7.2.2.1. Cas des engrenages cylindriques denture helicoidale 7.2.2.2. Cas des engrenages coniques a denture droite ............. 8. Dimensionement des arbres ................................................................................... 9. Choix et verification des clavettes .......................................................................... 10. Calcul des reactions. Trace des diagrammes des moments flechissants et des moments de torsion ............................................................................................... 11. Choix et verification des roulements ................................................................... 12. Choix et verification des accouplements ............................................................. 12.1. Accouplement elastique a boulons ........................................................... 12.2. Accouplements a flasques ........................................................................ 13. Verification des arbres ......................................................................................... 14. Choix du lubrifiant et du systeme de graissage des engrenages ....................... 15. Elements energetiques des reducteurs a roues dentees ..................................... 15.1. Calcul du rendement total du reducteur ................................................... 15.2. Calcul de la temperature de fonctionnement du reducteur ....................... 16. Elements constitutifs des reducteurs de tours a roues dentees cylindriques et coniques ............................................................................................................... 16.1. Construction des roues dentees cylindriques et coniques ........................ 16.2. Construction des carters ...........................................................................Bibliographie ...............................................................................................................
INTRODUCTIONLa formation de lingnieur mcanicien requiert la ralisation de projets mettant en oeuvre des organes de machine. Un tel projet comporte une phase de calcul et de dimensionnement suivi dune phase de conception et de dessin. Tout projet mcanique doit imprativement respecter des normes de secteur et valoriser les expriences antrieures. On se propose de raliser un projet de transmission mcanique dutilisation gnrale. Cette transmission est compose dun rducteur roues dentes cylindriques ou coniques, dune transmission par courroies trapzodales et dun accouplement. Ce projet sera loccasion pour ltudiant dillustrer par ce cas pratique une mthodologie de conception base sur le calcul des organes des machines et de la normalisation. Ltudiant doit suivre les tapes successives du projet en se rferant chaque fois que ncessaire aux annexes.
SCHEMAS CINEMATIQUES DES TRANSMISSIONS MECANIQUESLe schma de principe dune transmission mcanique rducteur est indiqu sur la figure1.
Fig. 1. Schma de principe dune transmission mcanique (ME - moteur lectrique; TCT - transmission par des courroies trapzodales; RT - rducteur de vitesse roues dentes; C accouplement, MR- machine rceptrice)
En partant de ce schma simple, on peut obtenir beaucoup de variantes qui diffrent par le positionnement dans lespace des lments de la transmission, par le type des roues dentes (cylindriques, coniques) et leur disposition lintrieur du rducteur de vitesse, par le nombre dtages de rduction dans le rducteur, par le type de couplage utilis (accouplement lastique boulons, accouplement rigide) etc.
1
B 1
D 2
I A
II C
a)
D 1 I A B II 2
Cb) Fig. 2. Schmas cinmatiques des rducteurs de vitesse utilisant des roues dentes cylindriques ou coniques. a) Rducteur roues dentes cylindriques denture hlicodale b) Rducteur roues dentes coniques denture droite
Dans ces schmas, les arbres sont nots I et II (de lentre vers la sortie), les roues dentes sont notes 1 et 2, les paliers sont respectivement A et B pour larbre I dentre, C et D pour larbre II de sortie. Les donnes initiales (grandeurs dentre) pour le calcul de la transmission mcanique sont: la vitesse de rotation de larbre de sortie du rducteur (entre dans la machine rceptrice) nII (en tr/min) ,la puissance de cet arbre PII (en kW) et la vitesse de rotation vide du moteur lectrique dentranement (en tr/min). Parfois on impose galement le rapport de rduction de la transmission par courroies iTCT, ou lintervalle de fonctionnement entre deux changements des roulements Lh (en heures).
2
1. CALCUL CINEMATIQUE ET ENERGETIQUE1.1. CHOIX DU MOTEUR ELECTRIQUE A partir des donnes initiales, on dtermine la puissance et la vitesse de rotation du moteur dentranement. Les donnes gomtriques rsulteront des valeurs standardises trouves dans les catalogues des fabricants de moteurs lectriques. La puissance ncessaire au moteur, PM, sobtient en considrant la puissance la sortie du rducteur, PII et les pertes nergtiques des lments composants la transmission, exprimes par leurs rendements: P PII (1.1) PM = II = 2 tot TCT r a 12 O:
tot - est le rendement total de la transmission mcanique; TCT - est le rendement de la transmission par des courroies trapzodales; r - est le rendement dune paire de roulements a12 - est le rendement de lengrenage
Dans le tableau 1.1 on indique des ordres de grandeur des rendements de quelques couples de frottement prsents dans une transmission mcanique.Tableau 1.1 : Rendements de quelques couples de frottement
Couples de frottement Engrenage cylindrique Transmission par courroies trapzodales Paire de roulements
Rendement 0,97 .. 0,99 0,94 .. 0,97 0,99 . 0,995
Pour tre du ct de la scurit, il faut calculer la puissance ncessaire au moteur dentranement en utilisant les valeurs infrieures des intervalles mentionns pour chacun des rendements. Connaissant la vitesse de rotation de marche vide du moteur lectrique, on choisit dans le catalogue des fabricants le moteur adquat. Lannexe 1 prsente les principales caractristiques fonctionnelles et dimensionnelles de quelques moteurs asynchrones. La puissance qui sera utilise dans les calculs ultrieurs, PM sera celle dtermine conformment la relation (1.1), et la vitesse de rotation sera une des valeurs de marche en charge, nM prise des tableaux de lannexe 1.
3
1.2. CALCUL CINEMATIQUE 1.2.1. Determination des rapports de transmission Le rapport de transmission total de la transmission mcanique est: itot = n M / n II On peut crire:
(1.2) (1.3) (1.4)
itot = iTCT i1 2 Cest dire i1 2 = itot / iTCT
O i1 2 est le rapport de transmission du rducteur de vitesse Pour un engrenage cylindrique, le rapport de transmission i1 2 recommand se situe entre 2,5 et 6,3 (max. 10). Les valeurs nominales des rapports de transmission sont standardises (v. le tableau 1.2)Tableau 1.2 : Rapports de transmission nominaux
I 1,00 1,25 1,60
II 1,00 1,12 1,25 1,40 1,60 1,80
I 2,00 2,50 3,15
II 2,00 2,24 2,50 2,80 3,15 3,55
I 4,00 5,00 6,30
II 4,00 4,50 5,00 5,60 6,30 7,10
I - Valeurs recommands II - Valeurs Admises
1.2.2. Calcul de la vitesse de rotation des arbres En connaissant la vitesse de rotation en charge du moteur, n M et les rapports de la transmission par courroies iTCT et de lengrenage i12 , on peut calculer la vitesse de rotation des arbres: n I = n M / iTCT ; n II = n I / i RT (1.5) La valeur calcule de la vitesse de rotation de larbre de sortie du rducteur n II , est diffrente de celle donne dans lnonc du projet. Dans une tape ultrieure du calcul (choix final des nombres des dents pour les quatre roues dentes) on va imposer la condition que le rapport de transmission effectif du rducteur ne diffre pas de celui donn initialement par la relation (1.4), de plus de 3 %.
4
1.3. CALCUL ENERGETIQUE 1.3.1. Calcul des puissances transmises par les arbres En partant de la puissance de sortie du rducteur PII (donne initialement), on calcule les puissances reues par chacun des arbres de la transmission: - la puissance reue par larbre I: PII PI =
r a12
(1.6)
- la puissance reue par larbre du moteur:
PM =
TCT
PI
=
PII2 TCT a12 r
(cf.1.1)
1.3.2. Calcul des moments de torsion transmis par les arbres Si la puissance est introduite en kW et la vitesse de rotation en tr/min, le moment de torsion des arbres I et II est donn par la relation :
M t I , II = 955 104
PI , II , nI , II
[N mm]
(1.7)
2. DIMENSIONNEMENT PRELIMINAIRE DES ARBRESLes arbres du rducteur sont sollicits en torsion et en flexion. Dans cette phase du projet, la flexion ne peut pas tre prise en compte, parce quon ne connat ni les forces qui chargent les arbres, ni les distances entre les appuis, ni la localisation des forces entre les appuis. Donc, pour obtenir des valeurs indicatives des diamtres des arbres, on va faire leur dimensionnement prliminaire en torsion et pour tenir compte de lexistence de la flexion, on va travailler avec des valeurs admissibles at rduites (usuellement at = 1012 N/mm2 pour les arbres I et II). La relation de dimensionnement prliminaire est: 16 M t d =3
at
(2.1)
Sur base des diamtres obtenus ( v. 2.1) les normes relatives aux dimensions des bouts darbres ( annexe 2) permet de fixer les diamtres nominaux et les longueurs.
5
Pour le bout de larbre II sur lequel on fait le montage de laccouplement, il faut galement consulter les donnes relatives soit laccouplement lastique goupilles (Annexe 3) soit laccouplement rigide (Annexe 4) pour assurer la compatibilit.
3. CALCUL DE LA TRANSMISSION PAR COURROIESTRAPEZOIDALESLe calcul de la transmission par courroies trapzodales arbres parallles est standardis. Les grandeurs dentre sont: la puissance larbre du moteur dentranement Pc = PM (kW), la vitesse de rotation nM (tr/min), le rapport de la transmission par courroies iTCT . Les tapes du calcul sont: a Le choix du type de la courroie est fait sur base du nomogramme de la figure 3.1 pour les courroies trapzodales troites, en fonction de la puissance larbre moteur PM et de la vitesse de rotation nM . Pour les profils de courroies situes sur les nomogrammes la proximit des limites entre les domaines, on recommande de choisir le type de courroie se trouvant sous la ligne oblique. Dans le tableau 3.1 on a indiqu les lments gomtriques des sections des courroies et leurs longueurs ltat libre.
Fig. 3.1. Nomogramme pour le choix des courroies trapzodales troites
6
/2 1 F0 Fo 2
A
Fig. 3.2. Forces dans les courroies trapzodales troites
b Le choix du diamtre de la poulie la plus petite D p1 est fait en fonction du type de courroie, en respectant les indications des normes. Le tableau 3.2 prsente un extrait de cette norme. c Le calcul du diamtre de la poulie la plus grande est fait avec la relation:D p2 = iTCT D p1
(3.1)
Sil ny a pas de restrictions, on augmente les diamtres la valeur la plus proche du tableau 3.2 . d On choisit prliminairement la distance entre les axes A:0,7( D p1 + D p2 ) A 2( D p1 + D p2 )
(3.2)
e Langle entre les branches de la courroie: D p D p1 = 2 arcsin 2 2A f Langle denroulement sur la poulie la plus petite :
(3.3)
1 = 180o et sur la poulie la plus grande 2 = 180o + g La longueur de la courroie a ltat libre:
(3.4) + L p = 2 A cos + ( 1 D p1 + 2 D p2 ) 2 A + 2 4A 2 360 La longueur ltat libre de la courroie est augmente jusqu la valeur standardise la plus proche (tableau 3.1). Avec la valeur normalise choisie pour L p , on recalcule A en utilisant la relation (3.4) et , 1, 2 .h La vitesse priphrique de la courroie: Dp1 nM (m/s) v= 60000
( D p1 + D p2 )
( D p2 D p1 ) 2
(3.5)
7
Tableau 3.1 : Courroies trapzodales. Dimensions et longueurs initiales Type Courr oie Dimensions Caractristiq ues de la section lpxh 8,5x8,0 11,0x10 14,0x13 16,0x15 19,0x18 a mm h h mm Dmax mm degrs Longueurs initiales Lp mm Minimu Maximu m m 630 3550 800 4500 1250 8000 1600 10000 2000 12500 Dp min mm Section de la courroie Ac cm2 0,54 0,90 1,50 1,98 2,78
SPZ SPA SPB 16x15 SPC
-
80,4 100,5 130,5 150,5 180,6
2,0 2,8 3,5 4,0 4,8
400,1
71 100 160 200 224
Longueurs initiales
Preferes
Lp, mm
A viter
400 2500 450 2800
500 3150 560 3550
630 4000 710 4500
800 5000 900 5600
1000 6200 1120 7100
1250 8000 1400 9000
1600 10000 1800 11200
2000 12500 2240 -
Exemples de notation: SPA 2000; (courroie trapzodale troite type SPA, ayant la longueur initiale Lp=2000 mm).
Tableau 3.2 : Srie des diamtres des poulies D p (mm).63 450 71 500 80 560 90 630 112 710 125 800 140 900 160 1120 180 1250 200 1400 224 1600 250 1800 280 2000 315 2500 400
On recommande que la vitesse priphrique de la courroie trapzodale ne dpasse pas 30 m/s pour les courroies trapzodales troites.i Le nombre prliminaire de courroies est calcul avec la relation: c f Pc z0 = cL c P0
(3.6)
o: cL - coefficient de longueur qui est choisi dans le tableau 3.3 en fonction de la longueur de la courroie ltat libre, L p .c f - coefficient de fonctionnement qui est choisi en fonction de la nature de la machine
dentranement et de la machine entrane ( c f =1).c - coefficient denroulement donn par la relation: c = 1 0,003(180 1 )
8
P0 - puissance nominale transmise par une courroie choisie dans les tableaux de lannexe 5 . Pour des valeurs intermdiaires des paramtres nM , D p1 et iTCT on va utiliser linterpolation linaire. z0 - nombre prliminaire des courroies.Tableau 3.3 : Coefficient de longueur CL Longueur Type de courroie primitive de la courroie Lp [mm] SPZ SPA SPB 400 450 500 560 630 0,82 710 0,84 800 0,86 0,81 900 0,88 0,83 1000 0,9 0,85 1120 0,93 0,87 1250 0,94 0,89 0,82 1400 0,96 0,91 0,84 1600 1,00 0,93 0,86 1700 1,01 0,94 0,87 1800 1,01 0,95 0,88 2000 1,02 0,96 0,90 2240 1,05 0,98 0,92 2500 1,07 1,00 0,94 2800 1,09 1,02 0,96 3150 1,11 1,04 0,98 3550 1,13 1,06 1,00 3750 1,07 1,01 4000 1,08 1,02
SPC
0,82 0,86 0,88 0,90 0,92 0,93 0,94
Le nombre final de courroies: z z= 0 cz o cz est le coefficient du nombre de courroies donn dans le tableau 3.4. Le nombre rsultant z est arrondi jusqu une valeur entire. On recommande z 6 .Tableau 3.4 : Coefficient du nombre de courroies cz
Nombre de courroies z0 23 4.6 plus de 6
cz
0,95 0,90 0,85
9
j La frquence des changements de direction des courroies se calcule avec la relation: v (Hz) (3.7) f = 103 x Lp
o:
x nombre de poulies ( x=2) v vitesse priphrique de la courroie, en m/s. L p - longueur ltat libre de la courroie (valeur normalise choisie), en mm.On recommande dviter de dpasser, pour la frquence des changements de direction, 40 Hz pour les courroies tisses, et 80 Hz pour les courroies fil central.k La force priphrique transmise: P (N) F = 103 c v
(3.8)
La force qui sollicite lappui des arbres F0 est : F0 = (1,5.....2) F (N)
(3.9)
10
4. DIMENSIONNEMENT PRELIMINAIRE DESENGRENAGES
4.1. CHOIX DES MATERIAUX POUR LES ROUES DENTES ET DES TRAITEMENTS THERMIQUES OU THERMOCHIMIQUES. Les roues dentes cylindriques ( denture droite ou hlicodale) et coniques qui sont utilises pour les rducteurs sont des organes de machines fortement sollicits. Les principales sollicitations (pour lesquelles on ralise le calcul de rsistance) sont la flexion au pied de la dent (effort unitaire, F ) et la pression hertzienne au contact des flancs (effort unitaire, H ). Ces deux sollicitations varient priodiquement dans le temps. Par consquent, pour le dimensionnement des engrenages, on doit connatre les caractristiques mcaniques gnrales des matriaux utiliss (la limite de rupture, la limite dlasticit, la duret, etc.) et les valeurs de la rsistance la fatigue pour les sollicitations susmentionnes ( F lim et H lim ). Les valeurs des rsistances sont dtermines par des essais effectus sur des prouvettes (roues dentes) au moyen de bancs dessais spcialiss. Les roues dentes utilises dans la construction des machines peuvent tre ralises en aciers lamins, forgs ou couls mais aussi en fonte, en alliages non ferreux (laiton, cuivre, alliages daluminium, etc.) et quelques fois mme en plastique. On utilise usuellement les aciers lamins ou forgs pour la construction des roues dentes cylindriques et coniques des rducteurs de vitesse qui doivent transmettre une puissance significative. Les aciers utiliss pour la construction des roues dentes peuvent tre diviss en deux groupes, en fonction du traitement thermique ou thermochimique quils subissent: - aciers amliors ou normaliss pour lesquels la duret Brinell du flanc de la dent 2 aprs le traitement est infrieure 3500 N/mm ; - aciers durcis ayant subi des traitements thermiques (trempe aprs chauffage la flamme) ou thermochimiques (cmentation, nitruration). Leur duret Brinell aprs le 2 traitement est suprieure 3500 N/mm . Le tableau 4.1 prsente les principales sortes daciers utiliss pour lexcution des roues dentes cylindriques et coniques des rducteurs de vitesse ainsi que les caractristiques mcaniques ncessaires pour le dimensionnement des engrenages.
11
4.2. DIMENSIONNEMENT PRELIMINAIRE DES ENGRENAGES 4.2.1. Dimensionnement prliminaire dun engrenage cylindrique extrieur denture hlicodale Lors du dimensionnement prliminaire dun engrenage cylindrique denture hlicodale, on dtermine lentraxe a, le module normal mn , langle dhlice de la denture , les nombres de dents des deux roues et les dports des dentures des roues dans le cas des roues denture corrige. Les tapes du calcul sont: a Dtermination de lentraxe a. En utilisant la relation de calcul de la sollicitation hertzienne (pitting) pour le dimensionnement, on obtient la distance minimale entre les axes conformment la relation: Z M Z H Z H lim K HN Z R Z W S H 2
a (1 + u )
K A K V K H M t pignon3
2ua
(4.1)
O: u =
z grand z petit
- rapport des nombres de dents ( u > 1 ).
Pour les engrenages rducteurs u = i1 2 (rapport de transmission). K A - facteur de la charge dynamique extrieure. Il dpend de la nature du moteur et du rcepteur. K A = 1 pour les rducteurs dutilisation gnrale. KV - facteur dynamique intrieur. On prend KV = 1,1 pour le dimensionnement prliminaire. K H - facteur de la rpartition longitudinale de la charge pour la sollicitation hertzienne. On prend K H =1,15 pour le dimensionnement prliminaire.
M tpignon - moment de torsion larbre du pignon. M tpignon M t I a - coefficient de largeur dfini par a =choisi dans lannexe 6.
b o b est la largeur de la roue dente. Il est a
12
Z M - facteur de matriau. Z M = 0,35 E o
1 1 1 1 = + E E E 2 1 2 avec E1 , E 2 , E tant respectivement le module dlasticit longitudinal de la roue 1
(E1), le module dlasticit longitudinal de la roue 2 (E2), le module dlasticit quivalent(E). Pour des engrenages composs de roues en acier, Z M = 271 N mm2 . Z H facteur du point de roulement. Z H = 1,77 au dimensionnement prliminaire. Z facteur de la longueur de contact. Pour le pr dimensionnement Z = 1 .
H lim effort unitaire limite la sollicitation hertzienne, dpend de la nature du matriaudu pignon et du traitement thermique ou thermochimique appliqu (tableau 4.1). S H facteur de sret par rapport la sollicitation hertzienne. On utilise la valeur minimale S H = 1,25 pour le dimensionnement prliminaire. K HN facteur du nombre de cycles de sollicitation pour la sollicitation hertzienne. K HN = 1 dans le cas des engrenages ayant une dure de fonctionnement illimit. Z R facteur de rugosit. Z R = 1 pour le dimensionnement prliminaire. Z w facteur du rapport de la duret des flancs. La valeur utilise pour le dimensionnement prliminaire est Z w = 1. La valeur de la distance entre les axes donne par la relation (4.1) est normalise. Lannexe 8 est un extrait de la norme. En principe, on choisit la valeur normalise suprieure celle calcule, mais si la valeur calcule dpasse de moins de 5% une valeur normalise, on choisit plutt cette dernire .b - Dtermination du module normal des roues dentes mn
La valeur minimale ncessaire du module normal de la denture des roues dcoule de la condition de rsistance la fatigue au pied de la dent. On utilise la relation suivante: mn M t pignon (1 + u )K A K V K F K F YF Y a a 2 O M tpignon - moment de torsion larbre du pignon ; M tpignon M t I . K F facteur de rpartition frontale de la charge. Sa valeur prliminaire est K F = 1 . K F facteur de rpartition longitudinale de la charge pour la sollicitation au pied de, la dent. K F = 115 pour le dimensionnement prliminaire.
F
(4.2)
lim
SF
K FN Ys YFx
13
YF facteur de forme. On prend de manire approximative YF = 2,25 pour ledimensionnement prliminaire. Y facteur de langle dhlice . Y = 1pour le dimensionnement prliminaire.
a entraxe ou distance entre les axes des roues. On utilise la valeur normalis choisie au point a. F lim effort unitaire limite (tension) pour la sollicitation la fatigue au pied de ladent, cest une caractristique du matriau du pignon (cf. tableau 4.1). S F facteur de sret pour la sollicitation au pied de la dent. On utilise la valeur minimale S F = 1,5 pour le dimensionnement prliminaire. K FN facteur du nombre de cycles de sollicitation au pied de la dent. On prend K FN = 1 pour une dure illimite de fonctionnement des engrenages. Ys facteur de concentration des contraintes. Ys = 1 pour le dimensionnement prliminaire. YFx facteur dimensionnel. Sa valeur prliminaire est YFx = 1. Les valeurs des autres facteurs ( a , K A , KV ) seront les mmes que celles utilises au point prcdent (point a). La valeur calcule pour le module normal mn est galement normalise (annexe 7). Si la valeur calcule mn est infrieure 1 mm, on prend mn =1 mm. En principe, on choisit dans les normes la valeur immdiatement suprieure la valeur calcule du module normal. On peut utiliser aussi la valeur normalise immdiatement infrieure celle calcule si la diffrence entre les deux est infrieure 5% de la valeur normalise.c Etablissement de langle dhlice .
On recommande le choix dune valeur de langle dhlice (exprime en degrs) comprise dans lintervalle 8o ; 20o . Pour rduire le nombre de manipulations lors de lusinage de ces engrenages, on recommande lutilisation des valeurs suivantes: - = 15o (12 o ) pour des roues dentes excutes en aciers amliors ou en aciers normaliss (ayant la duret Brinell du flanc < 3500 N/mm2). - = 10o pour des roues dentes excutes en aciers durcis superficiellement (HB flanc 3500 N / mm 2 ).d Etablissement du nombre de dents du pignon z1 .
[
]
On calcule le nombre maximum de dents du pignon en utilisant les valeurs de lentraxe et du module normal dtermins aux points a et b:
14
z1 max =
2a cos mn (1 + u )
(4.3)
On choisit un nombre de dents du pignon z1 satisfaisant aux conditions suivantes: - z1 doit tre un nombre entier infrieur z1max calcul avec la relation (4.3). - z1 14 ; si cette condition nest pas satisfaite, on augmente lentraxe la valeur normalise immdiatement suprieure celle choisie prcdemment et on recalcule mn et z1max .
- si z1 [14; 17] on choisit un dport positif de la denture pour viter linterfrence de
taillage. - si le nombre de dents du pignon z1max calcul est grand ( z1max >24,...,50(80)), on utilise un nombre de dents z1 plus petit afin davoir une prcision dexcution: z1 z1max si z1max 25 .e Choix final du module normal mn de la denture et des nombres de dents du pignon ( z1 ) et de la roue ( z2 )
On recalcule le module normal mn avec la relation: mn = 2a cos z1(1 + u ) (4.4)
La valeur donne par la relation (4.4) est re normalise ( cf. point b). 2a cos On recalcule z1 = mn (1 + u )La valeur de z1 sera la valeur entire immdiatement infrieure la valeur calcule. On calcule z2 = i1 2 z1 et on choisit z2 N . On recommande que z2 ne soit pas divisible par z1 (si possible prendre z1 et z2 premiers entre eux). Cette condition est satisfaite usuellement par laddition ou la suppression dune dent la roue.f - Calcul du rapport de transmission effectif de lengrenage:
z ief = 2 z1
(4.5)
Aprs le dimensionnement prliminaire de lengrenage, une vrification du rapport de transmission effectif du rducteur i1 2 simpose :
15
ief =
z2 z1
(4.6)
Il faut que lcart entre celui-ci et la valeur donne initialement dans lnonc du projet i RT (cf. point 1.2) ne dpasse pas 3%: i = ief i1 2 i1 2 100% 3% (4.7)
Si la condition nest pas remplie, on modifie le nombre de dents de la roue choisi au point e.g. - Calcul du dport de la denture
Le dport de la denture des roues cylindriques a des avantages comme: laugmentation de la puissance transmise, labsence dinterfrence de taillage, laccroissement du rapport de transmission. De plus, le dport de la denture permet de choisir la distance de rfrence entre les axes a 0 (correspondant lengrenage ralis par des roues denture non dporte) gale une valeur standardise. Dhabitude on utilise le dport positif (coefficient de dport x > 0), ce qui implique la croissance de la largeur de la base de la dent (et implicitement la croissance de la rsistance la flexion de la dent). Pour dterminer les valeurs des coefficients de dport du profil des deux roues, on doit parcourir les tapes suivantes (le calcul sera fait avec une prcision de cinq dcimales): - on calcule la distance de rfrence entre les axes: m (z + z ) a0 = n 1 2 2 cos
(4.8)
a 0 doit satisfaire aux conditions suivantes: - a 0 a NORME choisi au point a pour avoir un dport positif de la denture. - a NORME a 0 (0,4mn ;1,3mn ) pour que le dport positif produise ses effets bnfiqueset que la diminution de lpaisseur de la tte de la dent ne soit pas exagre. Si ces conditions ne sont pas satisfaites, on modifie soit le nombre de dents de la roue z2 soit le module normal normalis choisi (on reprend le calcul du point c). - on calcule langle de pression sur le cylindre primitif sur le plan frontal t
t = arctg
tg n cos
(4.9)
16
O n est langle de pression sur le cylindre primitif sur le plan normal.
n = 0 = 20o ( 0 angle du profil de rfrence).- on calcule langle dengrnement sur le plan frontal wt (angle de pression sur le cylindre de roulement en plan frontal):
wt = arccos
a0
a NORME
cos t
(4.10)
- on calcule la somme des dports des deux roues: xs = x1 + x2 = ( z1 + z2 ) o inv wt inv t 2tg n (4.11)
inv = tg
180
o
(4.12)
La rpartition des dports du profil sur les deux roues est faite laide du diagramme xs de lannexe 9. La procdure est la suivante : on porte en ordonn et en abscisse 2 z +z 1 2 . Le point obtenu se situe gnralement entre deux lignes Ri et Ri +1 . Le prolongement 2 des lignes Ri Ri +1 permet dobtenir l origine O du diagramme. En joignant lorigine O et le
point considr, on obtient une droite sur laquelle labscisse z1 fixe le dport x1 . On calcule ensuite x2 avec la relation :x2 = xs x1 = (x1 + x2 ) x1
(4.13)
4.2.2. Pr-dimensionnement dun engrenage conique a denture droite
Lors du dimensionnement prliminaire dun engrenage cylindrique denture hlicodale, on dtermine la distance entre les axes des roues ou entraxe a, le module normal mn , langle dhlice de la denture , le nombre de dents de la roue et du pignon ainsi que les dports des dentures des roues (dans le cas des roues denture modifie). Par contre, lors du dimensionnement prliminaire de lengrenage conique, on dtermine le diamtre primitif du pignon ( d1 ), le module normal mn sur le cne frontal extrieur et le nombre de dent du pignon et de la roue ( z1 , z2 ).
17
On va tudier le cas des roues coniques denture droite non dporte . Les tapes du calcul sont :a. Calcul du diamtre primitif du pignon conique sur le cne frontal extrieur d 1
En utilisant la relation de calcul de la sollicitation hertzienne (pitting), on va dimensionner le diamtre primitif du pignon sur le cne frontal moyen, d m1 :4M tpignon K A K V K H Rm u ZM ZH H lim K HN Z R Z w SH 2
d m1 3
(4.14 )
o:
M tpignon - moment de torsion larbre du pignon. M tpignon = M tIK A - facteur de la charge dynamique extrieure. Il dpend de la nature du moteur et de
la nature de la machine de travail. K A = 1 pour des rducteurs dutilisation gnrale. KV - facteur dynamique intrieur. Pour le pr-dimensionnement, on prend K V = 1,15 . K H - facteur de la rpartition longitudinale de la charge pour la sollicitation hertzienne. On prend K H =1,35 pour le dimensionnement prliminaire. b = 0,3K0,35 , avec Rm coefficient de largeur : Rm = Rm
b largeur de la roue conique, Rm longueur moyenne de la gnratrice du cne primitif. z grand u= le rapport des nombres des dents. Pour les engrenages de type z petitrducteur u = i1 2 . Sa valeur a t dtermine au point 1.2.Z M facteur de matriau . Z M = 271 N/mm2 pour les engrenages composs par des roues en acier. Z H facteur du point de roulement. Pour le pr-dimensionnement, on prend
Z H = 1,77 . H lim effort unitaire limite pour la sollicitation hertzienne. Il dpend de la nature dumatriau du pignon et du traitement thermique ou thermochimique appliqu (tableau 4.1).
18
S H facteur de sret pour la sollicitation hertzienne. On peut utiliser la valeur
minimale S H = 1,5 pour le dimensionnement prliminaire. K HN facteur du nombre de cycles de sollicitation pour la sollicitation hertzienne. K HN = 1 pour les engrenages conus pour une dure de fonctionnement
ZR Zw
illimite. facteur de rugosit. Sa valeur prliminaire est Z R = 1. facteur du rapport de la duret des flancs. Z w = 1 pour le dimensionnement
prliminaire. On calcule le diamtre primitif du pignon sur le cne frontal extrieur d1 : d1 = d m1(1 + 0,5Rm )
(4.15)
d1 doit tre un nombre entier ( d 1 N ), exprim en mm.b. Calcul du module sur le cne frontal extrieur m.
On va dimensionner le module sur le cne mdian mm sur base de lexpression de leffort au pied de la dent. On obtient la relation:mm = 4M tpignon K A KV K F K YF sin 1 Rm d2 m1
F limSF
(4.16)
K FN Ys YFx
o:
K A - facteur de la charge dynamique extrieure. Il dpend de la nature du moteur
et de la nature de la machine de travail. K A = 1 pour des rducteurs dutilisation gnrale. KV - facteur dynamique intrieur. Pour le pr-dimensionnement, on prend K V = 1,15 . K F facteur de la rpartition longitudinale de la charge au pied de la dent.
K F = 1,35 pour le pr-dimensionnement.K facteur de la rpartition frontale de la charge. K = 1 pour le
pr-dimensionnement. YF facteur de forme. Il est choisi dans lannexe 10 pour x=0 ( denture non dporte) et pour un nombre des dents estim z1 = 12, K,21 . Aprs le pr - dimensionnement, on recommence le calcul si le nombre de dents est trs diffrent de celui estim. 1 - demi-angle du sommet du cne primitif du pignon. Il est donn par lexpression suivante:
19
sin (4.17) i + cos o - langle entre les axes des roues qui composent le couple conique.
tg1 =
On utilise frquemment des engrenages coniques orthogonaux ( = 90o ) do: 1 1 = arctg (4.18) i Flim - effort unitaire de la sollicitation du pied de la dent du matriau du pignon (cf. tableau 4.1).S F - facteur de sret pour la sollicitation au pied de la dent. S F = 2 pour le pr-
dimensionnement K FN facteur du nombre de cycles de sollicitation au pied de la dent. On prend K FN = 1 pour les engrenages conus pour une dure de fonctionnement illimite. Ys facteur de concentration des contraintes. Sa valeur prliminaire est Ys = 1 . YFx facteur dimensionnel. On prend YFx = 1 pour le dimensionnement prliminaire. On dtermine le module sur le cne frontal extrieur m : m = mm (1 + 0,5Rm ) Et on choisit la valeur normalise suprieure au module calcul m.c. Calcul de nombre de dents du pignon z1.
(4.19)
On calcule le nombre maximum de dents du pignon: d z1 max = 1 m On choisira z1 de manire vrifier les conditions suivantes: - Pour des rapports de transmission ordinaires (1 < i 5) , on recommande z1 12,...,14 dents du pignon est repris dans le tableau 4.2Tableau 4.2 : Nombre minimal de dents z1 recommand pour le pignon conique
(4.20)
- En conformit avec les recommandations des fabricants, le nombre minimal de
i z1
1 18 40
2 15 30
3 12 23
4 10 18
5 8 14
6,3 6 14
Remarque: Si les conditions du tableau 4.2 ne sont pas satisfaites, on agrandit le diamtre primitif du pignon conique et on recalcule le module m.
20
d. Choix final du module et des nombres de dents
On recalcule le module sur le cne frontal extrieur avec le nombre de dent z1 choisi: d (4.21) m= 1 z1 Ce module est normalis (cf. annexe 7). On recalcule galement le nombre de dent z1 avec la nouvelle valeur du module sur le cne: d z1 = 1 (4.22) m On choisit la valeur finale z1 et on dtermine : (4.23) z2 = u z1 z2 doit tre un nombre entier ( z2 N ). On recommande que z2 ne soit pas divisible par z1 (prendre si possible z1 et z2 premiers entre eux). Cette condition est remplie usuellement par laddition ou la suppression dune dent la roue z2 .e. Calcul du rapport de transmission effectif de lengrenage conique :
Aprs le dimensionnement prliminaire de lengrenage, une vrification du rapport de transmission effectif du rducteur ief simpose. z (4.24) ief = 2 z1 Il faut que lcart entre celui-ci et la valeur donne initialement dans lnonc du projet i1 2 (cf. point 1.2) ne dpasse pas 3%: ief i1 2 i = 100% 3% i1 2
(4.25)
21
Tableau 4.1. Aciers recommands pour la construction des roues dentes cylindriques et coniques des rducteursDuret Matriau DIN STAS Traitement thermique ou thermochimique noyau Rsistance la rupture, r Limite dlasticit, Rsistance limite la fatigue au pied de la dent Pression hertzienne limite la fatigue,
(HB )
(HRC )
flanc
(N / mm 2 )500 620 700 850 620
(N / mm )2
c
(N / mm 2 )0,4 HB + 100 0,4 HB + 100 0,4 HB + 140
f lim
OL 50 OL 70 OLC 45*
Fe 490-2 (St 50-2) Fe 690-2 (St 70-2) C 45
500/2-80 500/2-80 880-88
Normalisation Normalisation Amlioration Trempe aprs chauffage la flamme ou CIF Amlioration Trempe aprs chauffage la flamme ou CIF Amlioration Trempe aprs chauffage la flamme ou CIF Nitruration Amlioration Trempe aprs chauffage la flamme ou CIF Nitruration Amlioration Cmentation Cmentation
HB = 150 170 HB = 200 220 HB = 220 260 200 260 50 57 HB = 200 300 200 300 50 57 HB = 270 320270 320270 320
270 300 340 370 360
160 170 720 4200,4 HB + 140
1,5 HB + 120 1,5 HB + 120 1,5 HB + 200 20 HRC + 101,5 HB + 200 20 HRC + 20
(N / mm 2 )
H lim
OLC 55
C55
880-88
180 190 950 7500,4 HB + 155
41 MoCr 11
42 CrMo 4
791-88
1,8 HB + 20020 HRC + 60
50 57
230 290 1000 800250 350 0,4 HB + 155 230 290
40 Cr 10
41 Cr 4
791-88
52 60 HB = 240 340 240 340 50 57 50 57 HB = 310 330 120 140 55 63 300 350 55 63240 340
20 HRC 1,8 HB + 20020 HRC + 60
34 MoCrNi 15 OLC 15* 21 MoMnCr 12
34 CrNiMo 6 C 15 20 CrMo 5
791-88 880-88 791-88
1100 390 1100
900280 850
250 350 0,4 HB + 155 140 150 390 460
20 HRC 1,8 HB + 200 24 HRC 25,5 HRC
22
5. ELEMENTS GEOMETRIQUES DES ROUES DENTES5.1. ELEMENTS GEOMETRIQUES DES ROUES CYLINDRIQUES A DENTURE HELICODALE.
Fig. 5.1. Elments gomtriques des roues dentes cylindriques denture hlicodale.
On calcule les lments gomtriques suivants: - le nombre de dents: z1(2 ) -
langle dinclinaison sur le cylindre primitif galement appel angle dhlice: langle de pression sur le cylindre primitif en plan normal galement appel angle de pression rel: n = 20 0 langle de pression sur le cylindre primitif en plan frontal galement appel angle de pression apparent: t (cf. rel. 4.9.) langle dengrnement en plan frontal: wt (cf. rel.4.10.) le module normal ou module rel: mn le pas normal ou pas rel (sur le cylindre primitif): pn = mn mn le module frontal ou module apparent: mt = cos (5.1)
-
(5.2)
23
-
le pas frontal galement appel pas apparent (sur le cylindre primitif): pt = mt (5.3) le coefficient de dplacement du profil ou dport: x1(2 ) la hauteur de la tte de la dent ou saillie:* ha1(2 ) = mn h0a + x1(2 ) = mn 1 + x1(2 )
(
)
(
)
(5.4)
* o h0a = 1 = coefficient de la hauteur de la tte de rfrence
-
la hauteur du pied de la dent ou creux: hf1,2 * = mn h0 f x1(2 ) = mn 1,25 x1(2 )
(
)
(
)
(5.5)
* o h0 f = 1,25 = coefficient de la hauteur du pied de rfrence
-
* * la hauteur de la dent: h = ha + h f = mn h0a + h0 f = 2,25mn
(
)
(5.6) mn z1(2 ) cos (5.7) (5.8) (5.9) (5.10)(5.11) (5.12)
le diamtre de division ou diamtre primitif: d1(2 ) = mt z1(2 ) = le diamtre du cercle de tte: d a 1(2 ) = d1( 2) + 2ha 1(2 ) le diamtre du cercle de pied: d f1(2 ) = d1(2 ) 2h f 1(2 ) le diamtre du cercle de base: db1(2 ) = d1(2 ) cost cos t le diamtre de roulement: d w1(2 ) = d1(2 ) cos wtla largeur de la denture de la roue: b2 = a a
Dhabitude, on utilise la valeur de la largeur de la denture de la roue donne par la relation (5.11) et pour le pignon, on prend une valeur un peu suprieure (majore de 2 5 mm) afin de compenser les erreurs de montage axial. le diamtre primitif de la roue virtuelle (roue quivalente): d1(2 ) d n1(2 ) = cos 2 le nombre de dents virtuel (roue quivalente): z1(2 ) zn1(2 ) = cos3
(5.13)
-
(5.14)
24
5.2. Elements geometriques des roues dentees coniques a denture droite pour un engrenage orthogonal ( = 90o )
Fig. 5.2. Elments gomtriques dun engrenage conique denture droite
On calcule les lments gomtriques suivants: le nombre de dents : z1(2 ) le demi-angle du cne de division appel aussi angle primitif: 1 = arctg z1 - pour le pignon : 1 = arctg z ief 2 - pour la roue : 2 = 90o 1 le module sur le cne frontal extrieur: m le pas sur le cne frontal extrieur: p = m
(5.15) (5.16) (5.17)
-
25
-
le coefficient de largeur: Rm le module sur le cne frontal mdian ou moyen: mm =* la hauteur de la tte de la dent: ha = h0a m = 1 m* o h0a = 1 - coefficient de la hauteur de la tte de rfrence.
m 1 + 0,5Rm
(5.18)
(5.19)
-
* la hauteur du pied de la dent: h f = h0 f m = 1,2 m * o h0 f = 1,2 - coefficient de la hauteur du pied de rfrence
(5.20)
-
* * la hauteur de la dent: h = ha + h f = h0a + h0 f m = 2,2 m
(
)
5.21)
le diamtre de division ou diamtre primitif sur le cne frontal extrieur: d1(2 ) = m z1(2 ) (5.22) le diamtre de division ou diamtre primitif sur le cne frontal mdian: d m1(2 ) = mm z1(2 ) (5.23) le diamtre du cercle de tte: d a = d 1(2 ) + 2ha cos 1(2 ) 1( 2 ) le diamtre du cercle de pied: d f = d 1(2 ) 2h f cos 1(2 ) 1( 2 ) la longueur extrieure de la gnratrice du cne primitif: d 1(2 ) R= 2 sin 1(2 ) la longueur moyenne de la gnratrice du cne primitif: dm 1( 2 ) Rm = 2 sin 1(2 ) la largeur de la denture: b = Rm Rmh langle de la tte de la dent: a = arctg a R hf langle du pied de la dent: f = arctg R langle de la dent: = a + f le demi-angle au sommet du cne de tte: a = + a le demi-angle au sommet du cne de pied: f = f le diamtre de division virtuel (roue quivalente): d 1(2 ) dv = 1( 2 ) cos 1(2 ) le nombre de dents virtuel (roue quivalente): z1(2 ) = zv 1( 2 ) cos 1(2 )
(5.24) (5.25)
(5.26)
-
(5.27) (5.28)(5.29) (5.30) (5.31) (5.32) (5.33)
-
(5.34)
-
(5.35)
26
-
le diamtre de tte virtuel (roue quivalente): d av = dv + 2ha1(2 )1(2 ) 1( 2 )
(5.36)
-
le diamtre de base virtuel (roue quivalente): dbv1, 2
= dv1,2 cos
(5.37)
-
la distance entre les axes ou lentraxe pour un engrenage cylindrique quivalent: d v + d v2 av = 1 . 2
(5.38)
6. CALCUL DES FORCES DANS LES ENGRENAGES6.1. FORCES DANS UN ENGRENAGE CYLINDRIQUE HELICOIDAL.Une force normale Fn apparat au contact de deux dents. Celle-ci peut tre dcompose en trois composantes selon trois directions orthogonales: la force tangentielle Ft , la force radiale Fr et la force axiale Fa conformment la figure 6.1. On calcule les trois composantes sur le cercle primitif de la roue.
Fig. 6.1. Forces dans un engrenage cylindrique hlicodal.
27
On nglige les pertes de puissance dans les engrenages, les forces de frottements tant faibles. Par consquent, on calcule les forces actionnant le pignon en utilisant le moment de torsion moteur ( larbre du pignon), et les forces qui agissent sur la roue mene sont prises gales en module et de sens contraire (conformment au principe de laction et de la raction). Les relations de calcul des forces dans un engrenage cylindrique hlicodal sont: - Pour les forces tangentielles: 2M t I Ft1 = Ft 2 = d1 - Pour les forces radiales: tg n Fr1 = Fr2 = Ft1 = Ft1 tgt cos - Pour les forces axiales: Fa1 = Fa2 = Ft1 tg - Pour la force normale: Ft1 2 Fn = Ft2 + Fa + Fr2 = (6.4) 1 1 1 cos n cos On doit mentionner que le sens des forces Ft et Fa dpend du sens de rotation de la roue et du sens dinclinaison des dents. La force radiale Fr a toujours le mme sens, elle est dirige vers laxe de rotation. La figure 6.2 prsente le schma des forces qui agissent sur les arbres du rducteur de vitesse un tage de rduction (rducteur roues dentes cylindriques denture hlicodale).B 1 Fr1 I A Fa Fa1 Fr2 Fr2 Fr1 Fa2 D 2
(6.1)
(6.2)
(6.3)
II C
Fig. 6.2. Forces sur les arbres dun rducteur cylindrique
28
6.2. Forces dans un engrenage conique a denture droiteComme le calcul de rsistance seffectue pour lengrenage cylindrique remplaant (quivalent) sur le cne frontal mdian, on considre la force normale sur la dent Fn applique dans le point dintersection de la ligne dengrnement avec le cercle primitif moyen. La force normale Fn se dcompose en trois composantes orthogonales: la force tangentielle Ft au cercle primitif moyen, la force radiale Fr et la force axiale Fa .
Fig. 6.3. Forces dans un engrenage conique denture droite
On nglige les pertes de puissance dans les engrenages (donc les forces de frottement). Puis, on calcule les forces dues au moment de torsion larbre moteur ( M t I ) qui agissent sur le pignon. Les forces qui actionnent la roue mene sont considres gales et de sens contraire (conformment au principe de laction et de la raction). Dans le cas dun engrenage conique orthogonal = 90o , les forces opposes Fa1 et Fr1 sont respectivement Fr2 et Fa 2 .
(
)
29
Les relations de calcul des forces dans un engrenage conique orthogonal denture droite sont: - Pour les forces tangentielles: 2M t pinion (6.5) Ft1 = Ft 2 = d m1 - Pour les forces radiales: Fr1 = Ft1 tg cos 1Fr2 = Ft1 tg cos 2
(6.6) (6.7) (6.8) (6.9)
- Pour les forces axiales: Fa1 = Ft1 tg sin 1 = Fr2Fa 2 = Ft1 tg sin 2 = Fr1
- Pour la force normale sur le flanc de la dent: Ft1 2 Fn = Ft2 + Fa + Fr2 = (6.10) 1 1 1 cos Le sens de la force tangentielle Ft agissant sur une roue conique dpend du sens de rotation. Les forces radiale Fr et axiale Fa ont toujours le mme sens. La figure 6.4 prsente le schma des forces sur les arbres du rducteur de vitesse un tage de rduction ( rducteur roues dentes coniques denture droite).
D 1 I B Fr1 A Fr1 Fa1 II 2 Fr2 Fr2 C
Fo
Fa2
Fig. 6.4. Forces sur les arbres dun rducteur conique
30
7. VERIFICATIONS DES ENGRENAGES7.1. VERIFICATION DES CONDITIONS DE TAILLAGE ET DENGRENEMENT Il faut dune part vrifier que lengrenage ne prsente pas de problmes lors de son usinage ( sous-taillage et rduction dpaisseur de la tte de la dent) et dautre part vrifier que lengrnement est satisfaisant ( continuit dengrnement, interfrence possible, jeu minimum sur le cercle de tte). 7.1.1. Verification du sous-taillage des dents Pour viter le sous-taillage (cest--dire linterfrence lors de lopration dusinage), on doit respecter la condition:
zno:zn1( 2 )
1( 2 )
z min
1( 2 )
(7.1)
z
1( 2 )
cos3 est le nombre de dents de la roue quivalente (virtuelle) la
roue cylindrique denture helicoidale z min1( 2 ) est le nombre minimal de dents de la roue cylindrique denture helicoidale qui peut tre usine sans sous-taillage avec un angle dinclinaison primitif et un dplacement spcifique (dport) du profil x. z min est donn par la relation:
z min 1 2 =( )
2 h0a x1( 2) cos
(
)
sin 2 t
(7.2)
o h0a reprsente le coefficient de hauteur de la tte de la dent de rfrence. ( h0a = 1 )
7.1.2. Verification de la continuite de lengrenement
Pour lengrenage cylindrique denture helicoidale, le degr de recouvrement total (ou rapport total de conduite) est donn par la relation:
= + o:
(7.3)
le degr de recouvrement du profil en plan frontal(ou rapport de conduite apparent);
31
le degr de recouvrement supplmentaire d linclinaison des dents(avancement des flancs) . Il est galement appel rapport de recouvrement. On utilise les relations:2 2 2 2 d a db d a db a sin wt 1 1 2 2 + = 1 + 2 a = 2mt cos t 2mt cos t mt os t b sin = 2 mn
(7.4)
(7.4)
Pour assurer la continuit du processus dengrnement, on doit vrifier la condition: - 11 pour les engrenages prcis (classes 5, 6, 7), , - 1,3 pour les engrenages de prcision modre (classes 8, 9, 10, 11). Pour un engrenage conique denture droite, on calcule le degr de recouvrement de lengrenage cylindrique quivalent (virtuel) qui doit vrifier la condition:2 d aV 1 d b2V 1 2 d aV 2 d b2V 2
= 1 + 2 a =
2 m cos
+
2 m cos
av sin wt
m cos
(7.5)
7.1.3. Verification des interferences des dents
Le diamtre du cercle o dbute le profil en dveloppante d l1 2 dpend du procd ( ) technologique dexcution de la denture. Considrons le cas usuel de lexcution de la denture par utilisation dune fraise qui a le profil de la crmaillre gnratrice, la relation qui permet le calcul du diamtre du cercle o dbute le profil en dveloppante est la suivante:* 2 h0 a x1( 2) cos dl1( 2 ) = db1( 2) 1 + tg t (7.6) z1( 2 ) sin t cost Les diamtres des cercles dlimitant les profils actifs des flancs des dents d A1 et d E2 (cest-
(
)
2
-dire les diamtres des cercles sur lesquels sont situs le point o dbute lengrnement sur les flancs des dents du pignon d A1 et le point o finit lengrnement sur les flancs des dents de la roue d E2 ) sont donns par:
d A1 =o:
cos A1
db1
et
d E2 =
cos E2
db2
(7.7)
32
tg A1 =
2 ( a 2 ) et z1
tg E2 =
2 ( a 1) z2
(7.8)
Les conditions remplir afin davoir un engrnement correct des deux roues ( pour viter linterfrence des dents lors de lengrnement), sont:d A1 dl1
et
d E2 dl2
(7.9)
7.1.4. Verification du jeu a la tete des dents
Pour un engrenage cylindrique denture helicoidale, on calcule le jeu la tte des dents avec la relation: da + d f 2 d f + d a2 (7.10) c = a 1 = a 1 2 2 Le jeu doit vrifier la condition: c 0,1mn (7.11)
Si cette condition nest pas remplie, on diminue les dimensions de la tte de la dent ( reduction de saillie) de manire obtenir le jeu minimal admissible ca = 0,1mn .7.1.5. Verification de lpaisseur des dents sur le cercle de tte
Pour les roues cylindriques denture helicoidale, le dport positif des profils mne une rduction de lpaisseur des dents sur le cercle de tte. On va vrifier cette epaisseur en calculant la longueur de larc correspondant la dent sur le cercle de tte dans le plan frontal sat et en la comparant avec une valeur minimale admissible. + 4 x1( 2)tg n (7.12) = d a1( 2 ) + invt inv at 1( 2 ) 1( 2 ) 2 z1( 2) o at est langle de pression sur le cercle de tte en plan frontal. Il est donn par la sat relation: d 1( 2) = arccos cos t da 1( 2 )
at
1( 2 )
(7.13)
Pour viter lendommagement de la tte de la dent cause de la rduction dpaisseur, on recommande de respecter la condition: s at1( 2 ) 0,2mt - pour les roues en acier amlior s at1( 2) 0,4mt - pour les roues denture durcie superficiellement.Si cette condition nest pas satisfaite, on peut soit modifier la rpartition de la somme des dports x s entre les deux composantes x1 et x2, soit rduire les diamtres des
33
cercles de tte (rduction de saillie) afin vrifier la condition relative au degr de recouvrement (ou rapport de conduite apparent).
7.2. VERIFICATION DE LA RESISTANCE DE LA DENTURE DES ROUES DENTES 7.2.1. Verification de la sollicitation au pied de la dent
Un effort unitaire maximal apparat au pied de la dent. Il est d une flexion variable cycliquement dans le temps. Aprs un nombre de cycles de sollicitation, une rupture par fatigue peut se produire au pied de la dent. La vrification de la sollicitation au pied de la dent est faite en calculant leffort unitaire d la flexion F et en le comparant une valeur admissible Fp .7.2.1.1. Cas des engrenages cylindriques denture helicoidale
Le calcul de la rsistance la fatigue est effectu dans une section normale pour les roues quivalentes (virtuelles). Le critre de rsistance de la dent est: Ft1( 2 ) F1( 2 ) = YF1( 2 ) K A K V K K F Y b1( 2 ) mn (7.14) Fp =1( 2 )
F lim1( 2 )SF
K FN YS YFX
o:
F1( 2) - leffort unitaire de flexion au pied de la dent;Ft1( 2) - la force tangentielle au niveau du cercle primitif; b1( 2)
- la largeur de la roue;
mn - le module normal de la denture; YF1( 2) - le facteur de forme de la dent (cf. annexe 10). Il est dtermin en fonction
du nombre de dents de la roue quivalente zn1( 2) et du dport du profil x1( 2) ;K A - le facteur de la charge dynamique extrieure(ou facteur dapplication). Pour
un rducteur dutilisation gnrale, on considre que K A =1; KV - le facteur dynamique interne (annexe 11) qui dpend de la vitesse d n priphrique sur le cercle primitif v = 1 pignon (m/s) o d1 est le 60000 diamtre primitif du pignon (en mm) et npignon est la vitesse de rotation de larbre du pignon (en tr/min).
34
K - le facteur de rpartition frontale de la charge. Pour les engrenages excuts 1 trs prcisment et fortement chargs, on prend K ,1 . Pour les engrenages usuels, on choisira K =1; K F - le facteur de distribution longitudinale de la charge pour une sollicitation au
pied de la dent. On le dterminera sur le diagramme prsent dans lannexe 14. Il dpend du facteur de distribution longitudinale de la charge pour la sollicitation hertzienne K H . Ce dernier est prsent dans les annexes 12 et 13 respectivement pour les dentures cylindriques et coniques ralises en aciers durcis superficiellement. Pour les engrenages ayant au moins une des roues denture de duret petite moyenne (HB< 3500 N/mm2), un meilleur rodage est ralisable et le facteur de distribution longitudinale K F sera dtermin par la relation: 2 Y est le facteur de langle dinclinaison. Il est dtermin par la relation :Y = 1 K F =
1 + K H
(7.15)
F limSF
(7.16) 1200 - la rsistance limite la fatigue par flexion au pied de la dent (cf. tableau 4.1). - le facteur de sret par rapport la rupture par fatigue au pied de la dent. Sa valeur usuelle est S F min 1,5; - le facteur du nombre de cycles de fonctionnement pour la sollicitation au pied de la dent (facteur de dure). on considre que :
k FN
k FN =1 pour N 107 cycles, k FN = (107/N)1/9 pour 103 N < 107 o N est le nombre de cycles de sollicitation auquelle est soumise la dent de la roue pendant le fonctionnement de lengrenage.
YsYFx
- le facteur de concentration de contrainte. Il prend en considration linfluence du rayon de raccordement au pied de la dent. Sa valeur usuelle est Ys = 1 . - le facteur dimensionnel.
Si mn 5mm , YFx =1 Si 5 < mn < 30mm : - YFx = 1,05 0,01mn pour des dentures durcies superficiellement - YFx =1,03-0,006 mn pour des dentures en aciers amliors
35
7.2.1.2. Cas des engrenages coniques a denture droite
Le calcul de rsistance seffectue pour un engrenage virtuel (cylindrique denture droite) dans la section mdiane de la largeur de la roue. Le critre de rsistance auquel doit satisfaire leffort unitaire au pied de la dent F est: F Ft1( 2) F1(2) = YF1( 2 ) K A KV K K F Fp = lim K FN YS YFx (7.17) b mm SF o:
F1( 2) - leffort unitaire de flexion au pied de la dent;Ft1, ( 2) - la force tangentielle au niveau du cercle primitif mdian;
b - la largeur de la roue; mm - le module sur le cne frontal mdian; YF1, ( 2) - le facteur de forme de la dent. Il est choisi lannexe 10 en fonction du nombrede dents de la roue quivalente zv1( 2) et pour x = 0 ;KA
KV
- le facteur de la charge dynamique extrieure(ou facteur dapplication). Pour un rducteur dutilisation gnrale, on considre que K A =1; - le facteur dynamique interne (annexe 11) qui dpend de la vitesse priphrique d n sur le cercle primitif v = 1 pignon (m/s) o d1 est le diamtre primitif du pignon 60000 (en mm) et npignon est la vitesse de rotation de larbre du pignon (en tr/min). - le facteur de rpartition frontale de la charge. Pour les engrenages excuts trs 1 prcisment et fortement chargs, on prend K ,1 . Pour les engrenages usuels, on choisira K =1; - le facteur de distribution longitudinale de la charge pour une sollicitation au pied
K
K F
de la dent. On le dterminera sur le diagramme prsent dans lannexe 14. Il dpend du facteur de distribution longitudinale de la charge pour la sollicitation hertzienne K H . Ce dernier est prsent dans lannexe 13 pour les dentures coniques ralises en aciers durcis superficiellement. Usuellement on prend S Fmin = 2 ;
K FN - le facteur du nombre de cycles de fonctionnement pour une sollicitation au pied de YS YFxla dent (facteur de dure); - le facteur de concentration de contrainte; - le facteur dimensionnel ( facteur de forme).
Les facteurs K A , KV , K , K F , K FN , YS , YFx seront choisis conformment aux recommandations faites pour les engrenages cylindriques denture helicoidale.
36
7.2.2. Verification de la resistance a la pression superficielle (Verification au Pitting)
La pression de Hertz entre les flancs des dents se calcule pour le contact au centre instantan de rotation C ( HC ) .7.2.2.1. Cas des engrenages cylindriques denture helicoidale
Pour un engrenage cylindrique denture helicoidale, on calcule leffort hertzien maximal pour le contact en C ( centre instantan de rotation) avec la relation:
HC = Z M Z H Z 1
Ft u + 1 K A K V K H Hp = H lim K HN Z R Z W b d1 u SH
(7.18)
o:
HC Leffort unitaire hertzien maximal pour un contact au centre instantan de rotation1
(point C) galement appel pression de Hertz de fonctionnement ; Z M Le facteur de matriau: Z M = 0,35 E 2 E1 E 2 E= o E1 + E 2E1 et E 2 tant les modules dlasticit longitudinaux des deux roues.
(7.19)
Dans le cas de deux roues dentes excutes en acier lamin, la valeur du facteur de matriau est Z M 271 N mm 2 . Z H Le facteur du point de roulement. Il est donn par la relation:ZH = cos b cos t tg wt2
(7.20)
Il est prsent aussi dans le diagramme de lannexe 15. Z Le facteur de la longueur de contact (ou facteur de conduite). Il est prsent dans le diagramme de lannexe 16 en fonction des composantes du degr de recouvrement (ou rapport de conduite) et ;
Ft La force tangentielle au niveau du cercle primitif;b La largeur de la denture de la roue mene; d1 Le diamtre primitif du pignon; u Le rapport des nombres de dents. Pour des engrenages rducteurs, u = i1 2 ; K A Le facteur de la charge dynamique extrieure (ou facteur dapplication); KV Le facteur dynamique interne (annexe 11); K H Le facteur de distribution longitudinale de la charge (facteur de chargelongitudinale) (cf. annexe 12);
37
Hp Leffort unitaire admissible pour la sollicitation la fatigue par pression de contactgalement appel pression de Hertz limite admissible. H lim La rsistance limite la fatigue par pression de contact. Elle dpend de la nature du matriau de la roue dente et du traitement subi (v. tableau 4.1); S H Le facteur de sret en rapport avec la destruction par pitting des flancs (ou facteur de sret effectif). En pratique, S H min = 1,25; K HN le facteur du nombre de cycles de fonctionnement pour une sollicitation hertzienne
(facteur de dure). On prendra : o K HN = 1 pour un nombre de cycles de fonctionnement N 5 10 7 ;o
K HN = 5 10 7 N
(
)
1/ 6
pour 10 3 N < 5 10 7 ;
Z R le facteur de rugosit des flancs. Il est donn par la relation: Z R = 3 Rao:
(
red 100
)
mZ R
= 3 Ra1 + Ra 2 3 100 a ( Ra1 , Ra 2 rugosits moyennes arithmtiques des flancs des roues , Ra1 , Ra 2 = 0,8 1,6 )
Ra
red 100
(
)
mZ R = 0,12 + (1000 H lim ) 5000 on prendra :
- H lim = 850N / mm 2 si la limite dendurance pour le matriau choisi est infrieure 850 N/mm2 - H lim = 1200N / mm 2 si le matriau choisi a une limite dendurance suprieure 1200N / mm 2 . Pour des valeurs intermdiaires 850 < H lim < 1200 , on va travailler avec la valeur de la limite dendurance du matriau.
ZW le facteur du rapport de duret des flancs. Si HB1 et HB2 reprsentent respectivement les durets Brinell des flancs de la dent du pignon et de la roue, on le choisira de la manire suivante :
Si HB1 HB2 > 1000 N / mm 2 , ZW = 1,2 Si HB1 HB2 1000 N / mm 2 , ZW = 1
38
7.2.2.2. Cas des engrenages coniques a denture droite
Pour un engrenage conique denture droite, on calcule leffort unitaire hertzien maximal pour le contact au point C (centre instantan de rotation) pour lengrenage cylindrique virtuel sur le cne frontal mdian en utilisant la relation (valable pour un engrenage orthogonal = 90 o ):
o:
HC 1
= Z M Z Hv
H Ft u2 + 1 K A KV K H Hp = lim K HN Z R ZW b1 d m1 u SH
(7.19)
HC leffort unitaire hertzien maximal pour le contact au centre instantan de rotation1
(point C) galement appel pression de Hertz de fonctionnement ; Z M le facteur de matriau; Z Hv le facteur du point de roulement pour un engrenage cylindrique virtuel. Il est choisi dans lannexe 15. on considre Z Hv = 1,77 pour les roues dentes sans dport. Ft la force tangentielle au niveau du diamtre primitif moyen;b1 - la largeur du pignon; d m1 Le diamtre du cercle primitif moyen;u le rapport du nombre de dents u = i1 2 ;
K A le facteur de la charge dynamique extrieure (ou facteur dapplication);
KV le facteur dynamique intrieur (ou interne) (annexe 11); K H le facteur de distribution longitudinale de la charge (annexe 13);
Hp leffort unitaire admissible pour une sollicitation la fatigue galement appelpression de Hertz limite admissible; H lim la rsistance limite la fatigue. Elle dpend du matriau constitutif de la roue dente et du traitement appliqu (tableau 4.1); S H le facteur de sret en rapport avec la destruction par pitting des flancs. En pratique on prend S H = 1,5 ; Les facteurs K HN , Z R , Z w ont la mme dfinition que celle introduite au point prcdent et seront choisis conformment aux recommandations faites pour les engrenages cylindriques denture helicoidale
39
8. DIMENSIONEMENT DES ARBRESLa forme et les dimensions des deux arbres doit tre prcis ce stade. Elles seront toutefois definitivement tablies aprs les tapes de vrification de la rsistence (v.chapitres10,13). Pour estimer le diametre de larbre sur lequel sera monte la roue mene il faut suivre les etapes suivantes: - on prend les valeurs normalises des bouts darbres ( relation 2.1 et annexe 2) - on choisit la bague lvres correspondant chaque arbre cest dire D, le diamtre extrieur et h la longueur : le diamtre de la bague lvres d etI , II tel que :
d etI , II = d I , II + (8 10)
(voir lannexe 17)
(8.1)
- on fixe le diamtre intrieur du roulement ( diamtre du tourrillon) comme :
d rI , II = d etI , II + (5 8)
(8.2)
Il faut galement que ce diamtre soit multiple de 5. Les roulements sont choisis aux annexes 18 et 19 . On trouve le diamtre extrieur D , la largeur , B, ainsi que les facteurs de charge dynamique et statique ( C et C0). - Le diamtre dassemblage de la roue mene sera suprieur au diamtre intrieur du roulement d rII
d assemblage = d rI , II + (8 10)
(8.3)
- Le diamtre et la largeur du moyeu seront tablis aprs le calcul de la clavette de fixation de la roue mene ( v.chapitre 9).
9. CHOIX ET VERIFICATION DES CLAVETTESLassemblage des roues dentes, des poulies de courroie et des accouplements sur les arbres est ralis dhabitude laide des clavettes faces parallles. On utilise parfois dautres types dassemblages (assemblages serrage propre, assemblages par cannelures, assemblages par des clavettes faces inclines ou par serrage par cne). Dhabitude les pignons ont des diamtres proches des diamtres des arbres de manire les excuter dans un mme bloc que larbre. On choisit cette solution si le
40
diamtre de pied de la roue dente d f satisfait la condition d f (1,4...1,5) d a o d a est le diamtre de larbre au voisinage de la roue dente. Aprs avoir estim le diamtre de larbre d assemblage dans la zone dassemblage par clavette faces parallles, on choisit les dimensions b h de la section de la clavette dans norme (lannexe 20). On dtermine ensuite la longueur de la clavette et on vrifie sa rsistance pour des sollicitations en pression et en cisaillement: 4M t s = as ( as = 90 120 N/mm 2 ) (9.1) h lc d a 2M t f = af ( a f = 60 80 N/mm 2 ) (9.2) bl da o l c est la longueur de contact de la clavette avec la rainure dans le moyeu. Elle est fonction de la forme et de la longueur l de la clavette : l c = l b pour une clavette de type A (les deux ttes arrondies) b l c = l pour une clavette de type C (une tte arrondie) 2 lc = l pour une clavette de type B (ttes droites).
Evidemment, la largeur du moyeu l B sera suffisamment grande pour pouvoir permettre la ralisation du contact sur la longueur l c ( l B l c ). Si la longueur de contact l c obtenue est plus grande que celle calcule prcdemment, on peut utiliser deux clavettes faces parallles ou mme des cannelures pour ne pas surdimensionner le moyeu.
10. CALCUL DES REACTIONS. TRACE DESDIAGRAMMES DES MOMENTS FLECHISSANTS ET DES MOMENTS DE TORSION
Pour pouvoir choisir les roulements et vrifier les dimensions des arbres, il faut trouver les ractions sur les appuis et tracer les diagrammes de variation des moments flchissants et des moments de torsion. Lopration est difficile car on ignore les distances entre les appuis et les points dapplication des forces lors de lengrnement. Les tapes parcourir sont les suivantes:a. Raliser un schma du rducteur (annexes 21 et 22) en utilisant les lments gomtriques des roues dentes, en apprciant les distances entre les roues ainsi que celles entre les roues et le carter, en estimant les largeurs des roulements et les distances
41
ncessaires pour la fixation des roulements. On tablira les distances entre les appuis et les points dapplication des forces sur base de ce schma. Chaque arbre est considr comme sappuyant la demi-largeur des roulements et les forces dans lengrnement sont considres comme des forces concentres appliques la demi-largeur des roues.b. Trac du schma de chargement et appui de chaque arbre. On va raliser les schmas de chargement et dappui de chaque arbre dans deux plans perpendiculaires (horizontal et vertical) car les forces dans les engrenages ne sont pas coplanaires. Sur larbre dentre, on considre que la force due la transmission par courroies trapzodales est une force concentre applique la demi-largeur de la roue de courroie (en porte faux). c. Calcul des ractions dans les appuis et trac des diagrammes des moments flchissants. On va le raliser dans les deux plans perpendiculaires (horizontal et vertical). Dans un appui quelconque (indic A), on a une raction normale dans le plan vertical V A et une autre dans le plan horizontal H A . On obtient la raction rsultante (force radiale):2 2 FrA = V A + H A .
La dtermination de la raction axiale dans les appuis dpend du type de roulement utilis et du type du montage choisi . Lors du trac des diagrammes des moments flchissants, on doit considrer les forces axiales dans les engrenages comme des forces parallles aux axes des arbres, mais leur action est excentre par rapport aux axes des distances gales aux rayons primitifs des roues respectives. Elles donnent donc des moments flchissants concentrs qui dterminent des variations dans les diagrammes de moments flechissants.d. Trac des diagrammes de variation des moments de torsion. Celui-ci est fait en considrant les chemins de transmission de la puissance sur chaque arbre.
11. CHOIX ET VERIFICATION DES ROULEMENTSOn va choisir le type de roulement utilis pour lappui de chaque arbre, puis leur grandeur et enfin on va vrifier leur dure de vie. Les arbres des rducteurs sont en gnral des arbres courts ( l / d < 10 ) o l est la distance entre les appuis et d est le diamtre moyen de larbre et, par consquent, ils ont une rigidit en flexion leve. Donc les angles dinclinaison des lignes daction des forces dans les appuis sont rduits, ce qui permet lutilisation des roulements radiaux billes et42
des roulements axiaux-radiaux galets coniques (qui imposent des conditions restrictives au regard de linclinaison dans les appuis). Dans la suite, on va discuter le choix et la vrification des roulements radiaux billes et des roulements radiaux-axiaux galets coniques.A. Les roulements billes contact radial
Ils reprennent principalement des forces radiales, mais ils peuvent reprendre galement des charges axiales. On peut utiliser deux types de montages (v. fig. 11.1):a) Le montage roulement menant et roulement libre est utilis spcialement pour les arbres longs. On choisit, en gnral, comme roulement menant le roulement dont le chargement radial est le plus petit. Il est fix axialement, sur larbre et dans le carter, dans les deux sens et va reprendre toute la charge axiale de larbre. Le roulement libre est fix axialement dans les deux sens sur larbre. Il est laiss libre dans le carter pour compenser les dilatations thermiques diffrentes en fonctionnement entre larbre et le carter. Le roulement libre reprendra seulement la force radiale (raction normale rsultante dans lappui concern), son chargement axial tant nul. b) Le montage flottant des roulements suppose la fixation axiale de chaque roulement dans un seul sens sur larbre (vers lintrieur du rducteur) et en sens oppos (vers lextrieur) dans le carter. On laisse dhabitude un jeu axial de 0,5 ... 1 mm pour compenser les diffrences de dilatation entre larbre et le carter. Dans ce montage, la force axiale est prise par le roulement vers lequel elle est oriente. Le montage flottant est utilis pour les arbres courts; il est plus simple mais il peut conduire un dsquilibre accentu du chargement des deux roulements (dans le cas o le roulement chargement radial serait le plus grand, il reprendrait aussi la force axiale). Les tapes successives dans le choix des roulements billes contact radial sont: 1. Dtermination du type du montage : montage roulement menant et roulement libre ou
montage flottant,2. Estimation du diamtre de larbre au droit du roulement en tenant compte des dimensions des arbres tablies lors du dimensionnement prliminaire (cf. chap. 2). Pour les arbres qui sortent lextrieur du rducteur (I et II), on a tabli le diamtre de tte des arbres d I , II . On choisira pour ceux-ci les diamtres des tourillons au droit des roulements
conformment la relation:
43
d rulI,II = d I , II + (12...18) mm
(11.1)
Les diamtres choisis pour les tourillons sur lesquels on fait le montage des roulements doivent satisfaire la condition: d rul I,II = 5k ou k N (11.3)3. Slection dans les catalogues des roulements des constructeurs, pour chaque arbre, des
dimensions du roulement billes (srie de diamtres et largeurs). Pour le diamtre estim du tourillon, on trouve dans les catalogues plusieurs grandeurs de roulements billes contact radial (sries de diamtres et largeurs 0, 2, 3 ou 4) qui, pour un mme diamtre de lalsage de la bague intrieure (d = d rul ) , ont des diamtres extrieurs (D) et des largeurs (B) diffrentes. On va essayer, au dbut, de choisir un roulement des sries moyennes (2 ou 3) et, en fonction de la dure de vie obtenue, on peut passer la srie infrieure (0) ou suprieure (4). Lannexe 18 prsente un extrait de la norme pour le choix des roulements radiaux billes.4. Vrification des roulements choisis en dterminant leur dure de vie Lh (en heures) . Celle-ci doit tre suprieure une dure de fonctionnement admissible Lha qui, pour les
rducteurs, a une valeur comprise entre 12 000 heures et 20 000 heures. En pratique, le choix et la vrification dun roulement billes contact radial se droulent conformment aux tapes suivantes :a. Les donnes dentre - le diamtre du tourillon au droit du roulement d rul (mm);
- la vitesse de rotation de larbre n (tr / min); - le chargement radial des deux roulements: Fr , Fr2 (N) les ractions 1 normales dans les deux appuis; - le chargement axial Fa (N) force axiale rsultante due aux roues montes sur larbre; - la dure de vie admissible Lha = 12000...20000 heures.b. Le choix du type de montage et ltablissement du chargement axial de chaque roulement. Si le roulement 1 est menant Fa1 = Fa et Fa2 = 0 . Si le roulement 2 est menantFa1 = 0 et Fa2 = Fa . Si on a un montage flottant, on va faire le calcul pour la situation la
plus dsavantageuse pour laquelle toute la force axiale est reprise par le roulement chargement radial le plus grand;
44
c. On choisit un roulement billes contact radial dune srie moyenne (2 ou 3) pour le diamtre de tourillon d = d rul et lannexe 18 nous donne la capacit de chargement
dynamique C (N) ou charge dynamique de base et la capacit de chargement statique C 0 (N) pour le roulement choisi.d. On calculeFa pour chaque roulement et on choisit e et Y (ventuellement par C0
interpolation linaire) dans le tableau de lannexe 18.e. On calculeFa pour chaque roulement ensuite, on dtermine la charge dynamique Fr
quivalente: F - si a e on a P = Fr Fr F - si a > e on a P = XFr + YFa . Fr
(11.4)
o X = 0,56 (le mme pour tous les roulements billes contact radial) et Y a la valeur choisie prcdemment.f. On calcule la dure de vie de chaque roulement: L (millions de rotations) et Lh (en heures) avec:C L= P L 106 Lh = n 603
( en millions de rotations) ( en heures)
(11.5) (11.6)
et
g. Si les deux roulements dun arbre vrifient la condition Lh Lha le choix est correct
(ventuellement on peut essayer le choix dun roulement de la srie infrieure si lingalit est accentue); tandis que si Lh < Lha pour le roulement essay, on slectionne un roulement billes contact radial dune srie suprieure ou on choisit des roulements radiaux-axiaux galets coniques. On peut aussi essayer daugmenter le diamtre du tourillon au droit du roulement, mais cette solution est dsavantageuse, car elle implique une augmentation de lencombrement et du poids de larbre.
45
Roulement menanta
Roulement libre
b
Fig. 11.1. Montages des roulements billes contact radial
B. Les butes radiales - axiales galets coniques
Les butes radiales - axiales galets coniques supportent des charges radiales ainsi que des charges axiales grce au contact entre les galets et le chemin de roulement dans les bagues. Ils ont, dimensions gales, une capacit de chargement et une dure de vie plus
46
grandes que les butes billes. On peut utiliser deux types de montages pour les butes radiales axiales galets coniques (cf. fig.11.2). a. montage en O b. montage en X a. Le montage en O est utilis dans le cas o la distance entre les butes est rduite (les roues tant montes en porte faux). Dans ce cas, on ralise une augmentation de la distance entre les centres de pression des deux butes par rapport la situation du montage en X . Ce type de montage est utilis pour lappui de larbre du pignon conique. Le rglage du jeu dans les butes (au montage) afin de compenser les diffrences de dilatation entre larbre et le carter en fonctionnement est ralis laide dun crou agissant sur la bague intrieure de la bute.b. Le montage en X est utilis pour des arbres plus longs, sur lesquels les roues sont montes entre les paliers. Le rglage du jeu dans les butes est ralis laide des couvercles qui fixent les bagues extrieures.
Les bagues radiales axiales galets coniques introduisent des forces axiales supplmentaires (intrieures) Fas . Une telle bute charge par des forces radiales Fr introduit une force axiale supplmentaire gale : F (11.7) Fas = 0,5 r Y o Y est le coefficient de la force axiale dans lexpression de la charge dynamique quivalente. Il est slectionn pour chaque bute dans les catalogues des constructeurs (cf. annexe 19). Trois forces axiales agissent usuellement sur un arbre appuy sur deux butes galets
coniques (monts en O ou en X ), ce sont: - la force axiale K a provenant du fonctionnement des diffrents lments de machines monts sur les arbres (roues dentes, accouplements, etc.), - les forces axiales supplmentaires Fas1 et Fas2 des deux butes. Les deux forces supplmentaires introduites par les butes sont calcules en utilisant la relation (11.7). Leur sens dpend du type du montage (v.fig.11.2). Pour le choix et la vrification des butes radiales axiales galets coniques, il est ncessaire de dterminer le chargement axial de chaque bute. On applique lalgorithme suivant: - on dtermine le sens de la rsultante Ra de toutes les forces axiales sur larbre:
Ra = K a + Fas + Fas ; 1 2
47
- la bute qui porte des charges axiales ayant le sens de la rsultante est considre comme charge avec la somme (vectorielle) de la force axiale K a et de la force axiale supplmentaire de lautre bute; - la deuxime bute est considre (conventionnellement) comme charge avec sa propre force axiale supplmentaire. Les tapes parcourues pour le choix et la vrification des butes radiales axiales galets coniques sont:
a. Choisir le type du montage (en O et X ) ; b. Etablir le diamtre du tourillon au contact avec les butes en conformit avec les lements prciss pour les butes radiales billes; c. Pour le diamtre du tourillon tabli au point b, on choisit une bute radiale axiale galets coniques dune srie moyenne de diamtres et largeurs, en utilisant les catalogues des constructeurs. Lannexe 19 prsente un extrait de la norme se rfrant aux butes aux galets coniques. Une fois la bute choisie, on dtermine les coefficients e et Y. d. Calculer les charges axiales supplmentaires introduites par les deux butes conformment la relation (11.7) ; e. Appliquer lalgorithme permettant de dterminer le chargement axial de chaque bute ; f. Calculer le rapport Fa / Fr pour chaque bute; g. Calculer la charge dynamique quivalente P; F - si a e alors P = Fr , Fr F - si a > e alors P = XFr + YFa avec X = 0,4 (mmes pour les butes galets Fr
coniques), et Y est indiqu dans les catalogues pour chaque bute.h. Calculer la dure de vie des deux butes (en millions de rotations) avec la relation:C L= P10 / 3
(en millions de rotations)
(11.8)
o C est la capacit de chargement dynamique de la bute ou charge dynamique de base;i. Calculer la dure de vie des deux butes (en heures) avec la relation :
48
Lh =
L 10 6 (heures) n 60
(11.9)
j. Si la condition Lh Lha est vrifie pour les deux butes de larbre, le choix est correct.
On peut ventuellement essayer de choisir une bute de dimensions infrieures si lingalit est accentue. Tandis que si Lh < Lha ,on choisit une bute galets coniques ayant des dimensions suprieures.
a.
Fas Frez Fr1
K Fr
Fas Frez1
Fas1b.
Ka
Fas2
Fas1 Frez1
Ka
Fas1 Frez1 Fr1
Fas1
Ka
Fas2
Fig. 11.2. Montages des butes radiales axiales galets coniques
49
12. CHOIX ET VERIFICATION DES ACCOUPLEMENTSOn va prsenter le choix des accouplements lastiques boulons et flasques.
12.1. ACCOUPLEMENT ELASTIQUE A BOULONS (Annexe 3) Il assure la transmission lastique du moment de torsion (attnuation des chocs) en intercalant sur le trajet de la puissance transmise des douilles en caoutchouc. La grandeur de laccouplement est choisie en fonction du moment de torsion nominal ( M tn ) conformment la condition:
M t c = Cs M t II M t no: M tc est le moment de torsion de calcul;
(12.1)
M tII est le moment de torsion de larbre de sortie du rducteur (sur lequel se trouve
laccouplement); C s - coefficient de scurit dpendant de la nature du moteur, de la machine de travail et du rgime de fonctionnement. Dans le cas dune transmission dutilisation gnrale, on peut prendre C s = 1 . Pour chaque grandeur daccouplement, la norme fournit certaines valeurs du diamtre du bout darbre sur lequel on fait le montage de laccouplement. Si le diamtre de la tte de larbre II (sur lequel se trouve laccouplement) choisi au point 2 est infrieur celui ncessaire, on utilisera des demi-accouplements de type P. Un demi-accouplement P est livr avec les trous dj faits un diamtre d rduit, diamtre qui peut tre agrandi la valeur d 0 . On doit vrifier la rsistance de la tte de larbre ainsi que la rsistance de la clavette faces parallle qui ralise lassemblage de laccouplement avec larbre. Un accouplement boulons est excut de deux manires: - type N accouplement normal; - type B accouplement douilles dcartement. De mme, on doit mentionner que dans la composition de laccouplement on peut avoir des demi-accouplements de mme type ou de types diffrents. Exemple pour la notation dun accouplement lastique boulons: CEB 7N P63/K71 OT 60-3 accouplement lastique boulons de grandeur 7, type N, compos dun demi-accouplement type P diamtre dalsage 63 mm et dun autre demiaccouplement de type K diamtre dalsage 71 mm. Ces deux demi-accouplements sont excuts en acier OT 60-3.
50
12.2. ACCOUPLEMENTS A FLASQUES (Annexe 4) Ils ralisent la transmission rigide du moment de torsion (nattnuent pas les chocs). Les vis qui fixent les flasques peuvent tre montes avec ou sans jeu (ajustes) dans les trous des flasques. Pour viter lapparition des sollicitations supplmentaires, on peut avoir un systme de centrage sous la forme de seuil de centrage ou dun anneau de centrage. Les accouplements flasques sont excuts selon deux variantes constructives: - type CFO pour laccouplement des arbres horizontaux; - type CFV pour laccouplement des arbres verticaux. La grandeur dun accouplement est choisie en fonction du moment de torsion nominal M tn que laccouplement peut transmettre conformment la condition:
M t c = Cs M t II M t no: M tc est le moment de torsion de calcul;
(12.2)
M t II est le moment de torsion larbre de sortie du rducteur (II) sur lequel se trouvelaccouplement; C s est le coefficient de scurit. Il dpend de la nature du moteur, des conditions de travail et du rgime de fonctionnement. Dans le cas dune transmission dutilisation gnrale, on peut prendre C s = 1 .
Exemple pour la notation dun accouplement flasques: CFO 6-35 accouplement flasques pour les arbres horizontaux, de grandeur 6, de diamtre nominal de bout darbre valant 35 mm. On recommande la vrification des vis dun accouplement pour une sollicitation compose (traction et torsion) pour les vis montes avec jeu et pour le cisaillement pour les vis ajustes.A. Cas des vis montes avec jeu Le moment de torsion est transmis par le frottement entre les flasques qui sont presses par les forces crees dans les i s vis au montage. La force axiale qui nat dans une vis par le serrage de lcrou au montage est: 2 M tc Fa = K is
(12.3)
o :
est le coefficient de frottement entre les flasques ( 0,15...0,2 );i s est le nombre de vis.
K est le diamtre du cercle sur lequel on fait le montage des vis;
La tige de la vis est sollicite en: - traction: 4 Fa ts = 2 d1
(12.4)
51
o: d1 est le diamtre intrieur du filet. - torsion ( moment du serrage de lcrou par la cl lors du montage): d Fa 2 tg ( 2 + ) M 2 t s = ts = 3 Ws d 116
(12.5)
o: M ts - Le moment de torsion qui apparat dans la vis au serrage de lcrou;
W s - Le module de rsistance polaire de la section de la vis; d1 , d 2 - respectivement le diamtre intrieur et le diamtre moyen du filet; 2 - Langle dhelice du filetage; 2 = arctg ( p / d 2 ) avec p - le pas du filet;
- Langle de frottement apparent entre les filets de la vis et de lcrou; = arctg ( / cos 30 o ) ) pour le filet mtrique avec tant le coefficient de frottement ( = 0,1.....0,15 ).Les deux efforts unitaires sont composs. Daprs la thorie de la rsistance des matriaux, on obtient leffort unitaire quivalent:
echs = t2 + 4 t2s s
(12.6)
qui doit vrifier la condition:
echs at = 90.....120 N / mm 2B. Cas des vis ajustes.
(12.7)
La tige de la vis est soumise au cisaillement sous laction dune force tangentielle Ft provenant du moment de torsion transmis. Son expression est: 2M tc F fs = t = af = 60.....80 N / mm 2 2 As d K is 3 4 o: As est laire transversale de la vis ajuste (section); d 3 est le diamtre du trou de montage de la vis ajust (v. annexe 4). (12.8)
52
13. VERIFICATION DES ARBRESAprs avoir dtermin la gomtrie et les dimensions des diffrents tronons de larbre, on vrifie les aspects suivants: a) la rsistance la fatigue en flexion de larbre, b) la rsistance une sollicitation compose (flexion et torsion), c) les dformations en flexion et en torsion, d) la rsistance aux vibrations (calcul des vitesses critiques). On dtaillera uniquement la premire de ces vrifications, savoir la vrification de la rsistance la fatigue en flexion.a. Vrification de la rsistance la fatigue en flexion des arbres
Elle est ralise dans les sections des arbres qui prsentent des concentrations de contraintes (rainures de clavette, variations de sections, dgagements, filets etc.). Considrons le cas gnral o dans une section concentration de contraintes on a autant defforts unitaires de flexion que de torsion variables dans le temps. On parcourra les tapes suivantes: - On calcule les grandeurs caractristiques dune sollicitation en flexion variable. Le moment flchissant dans une section quelconque est constant dans le temps car leffort de flexion dans une fibre quelconque varie daprs un cycle altern symtrique cause de la rotation de larbre. On peut donc crire:2 Miv + Mi2 H
max =
M i rez Wz
=
Wz
(13.1) (13.2)
min = max
o: M iv , M iH , M irez reprsentent respectivement le moment flchissant en plan vertical, le moment flchissant en plan horizontal et le moment flchissant rsultant dans la section considre (voir calculs du chapitre 10 appliqus la section considere). De mme, on peut calculer:
53
= max 2 2 o: m est leffort unitaire moyen et v est lamplitude de la sollicitation.
m =
max + min
= 0; v =
max min
(13.3)
- On calcule le coefficient de scurit par rapport la fatigue pour la sollicitation de flexion en utilisant la relation de Soderberg ou celle de Serensen: 1 c = k v m + 1 cc =
(13.4)





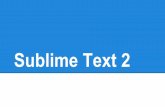





![Manuel utilisateur [Type text]](https://static.fdocuments.fr/doc/165x107/62b3a1e97b894a1f1f72f2b9/manuel-utilisateur-type-text.jpg)





